Embed Size (px)
Citation preview
1
BAB I
PENDAHULUAN
I.1. Latar Belakang
Kegiatan pendaftaran tanah merupakan rangkaian kegiatan yang dilakukan oleh
pemerintah secara terus menerus, berkesinambungan, dan teratur. Kegiatan tersebut
meliputi pengumpulan, pengolahan, pembukuan, dan penyajian serta pemeliharaan
data fisik dan data yuridis, dalam bentuk peta dan daftar, mengenai bidang-bidang
tanah dan satuan-satuan rumah susun, sehingga didapatkan aspek propertis dan legal
kadaster. Kegiatan tersebut telah diatur dalam Peraturan Pemerintah Nomor 24
Tahun 1997. Dalam pelaksanaannya, kegiatan pendaftaran tanah diselenggarakan
oleh Badan Pertanahan Nasional (BPN).
Titik Dasar Teknik (TDT) dalam pendaftaran tanah didefinisikan sebagai titik
yang mempunyai koordinat yang diperoleh dari suatu pengukuran dan perhitungan
dalam suatu sistem tertentu yang berfungsi sebagai titik ikat bagi keperluan
penyiapan peta pendaftaran/peta dasar pendaftaran serta untuk keperluan
rekonstruksi batas bidang tanah (Pasal 1 butir 13 Peraturan Pemerintah Nomor 24
Tahun 1997). Pengukuran TDT dapat dilaksanakan dengan metode terestris atau
metode lainnya, sesuai dengan Pasal 7 PMNA/Ka.BPN Nomor 3 Tahun 1997 tentang
Ketentuan Pelaksanaan Peraturan Pemerintah Nomor 24 Tahun 1997. Titik Dasar
Teknik mempunyai peran yang penting dalam proses pemetaan dan pendaftaran
tanah, sehingga perlu dilakukan pemeliharaan secara kontinyu terhadap TDT yang
telah ada. Pemeliharaan ini semestinya dilakukan dengan suatu metode pengukuran
yang relatif singkat dengan ketelitian yang tinggi sesuai dengan TDT yang diukur
serta dengan biaya yang relatif murah karena dilakukan secara periodik.
Sebagai langkah awal pelaksanaan pemeliharaan TDT, BPN RI bekerjasama
dengan Badan Pengkajian dan Pengembangan Teknologi (BPPT) melakukan sebuah
studi kajian pustaka mengenai pembangunan sistem GNSS CORS (Global
Navigation Satellite System – Continuously Operating Reference Stations). GNSS
CORS di BPN RI dikenal sebagai Jaringan Referensi Satelit Pertanahan (JRSP).
2
JRSP merupakan sebuah teknologi handal dan layak yang memberikan ketelitian
tinggi untuk penentuan posisi di permukaan bumi. JRSP dibangun dengan tujuan
mempermudah dan mempercepat tercapainya tertib pertanahan, meningkatkan
produktifitas dan akurasi data, serta meningkatkan kualitas pelayanan kepada
masyarakat di bidang survei dan pemetaan. Dalam pelaksanaannya, GNSS CORS
dengan metode statik digunakan oleh BPN untuk pengukuran koordinat TDT.
Metode lain yang digunakan untuk pengukuran TDT adalah aplikasi teknologi satelit
GNSS memanfaatkan CORS sebagai base station dengan metode RTK-NTRIP (Real
Time Kinematic-Networked Transport Internet Protocol).
Pengukuran koordinat dengan menggunakan GNSS CORS RTK NTRIP ini
juga lebih efisien dengan ketelitian yang mencapai fraksi sentimeter dan waktu
pengukuran juga relatif cepat dibandingkan metode GPS statik. Oleh karena itu,
aplikasi GNSS CORS ini diharapkan bisa menjadi metode alternatif dalam
pemeliharaan TDT yang telah ada. Pada penelitian ini dilakukan evaluasi terhadap
koordinat TDT yang tersebar di Kabupaten Bantul hasil pengukuran menggunakan
receiver GNSS CORS. Metode yang digunakan adalah RTK NTRIP. Hasil
pengukuran dengan GNSS CORS RTK NTRIP dibandingkan dengan koordinat pada
buku tugu.
I.2. Rumusan Masalah
Penggunaan aplikasi GNSS CORS RTK NTRIP sebagai metode alternatif
dalam pemeliharaan TDT orde 3 masih perlu dievaluasi. Pertanyaan penelitian ini
adalah berapakah koordinat TDT orde 3 dan ketelitian hasil pengukuran
menggunakan GNSS CORS RTK NTRIP dengan koordinat yang ada pada buku
tugu? Dan seberapa besar perbedaan koordinat hasil ukuran GNSS CORS metode
RTK NTRIP terhadap koordinat yang telah ada pada buku tugu BPN RI?
I.3. Batasan Masalah
Batasan masalah pada penelitian ini sebagai berikut:
1. Metode pengukuran yang digunakan adalah metode RTK NTRIP.
3
2. Lama waktu pengamatan adalah 15 menit dengan solusi fixed dan
menggunakan sampling rate 10 detik.
3. Pengukuran dilakukan terhadap TDT orde 3 di Kabupaten Bantul dengan
jumlah 30 tugu.
4. Hasil pengukuran TDT orde 3 dengan aplikasi GNSS CORS RTK NTRIP
dibandingkan dengan koordinat TDT orde 3 pada buku tugu BPN.
I.4. Tujuan Penelitian
Tujuan dari penelitian ini adalah:
1. Menentukan nilai koordinat TDT orde 3 hasil pengukuran dengan receiver
GNSS CORS metode RTK NTRIP.
2. Menghitung ketelitian koordinat TDT orde 3 hasil ukuran receiver GNSS
CORS metode RTK NTRIP.
3. Menguji signifikansi perbedaan antara koordinat TDT orde 3 hasil ukuran
receiver GNSS CORS metode RTK NTRIP dengan koordinat buku tugu.
I.5. Manfaat Penelitian
1. Memberikan rekomendasi bagi BPN sebagai penyelenggara Kerangka Dasar
Kadastral Nasional untuk mengetahui perbandingan ketelitian koordinat hasil
ukuran antara GNSS CORS metode RTK NTRIP dengan koordinat yang ada
pada buku tugu.
2. Memberi masukan dan referensi dalam pengembangan pemanfaatan GNSS
CORS metode RTK NTRIP dalam pengukuran koordinat TDT.
I.6. Tinjauan Pustaka
Kebutuhan terhadap metode pengukuran yang relatif singkat dengan ketelitian
yang tinggi mendorong BPN RI untuk mengembangkan teknologi GNSS CORS. Hal
ini dilakukan untuk mengoptimalkan kegiatan pelayanan pendaftaran tanah yang
dilakukan oleh BPN RI. CORS di BPN dimaksudkan untuk memberikan layanan
4
pendaftaran tanah menuju tertib administrasi pertanahan ke arah yang lebih baik
(Sunantyo, 2010)
Penentuan posisi titik dengan GPS secara diferensial direkomendasikan dapat
mencapai ketelitian yang lebih baik bila dibandingkan dengan penentuan posisi
secara absolut dan untuk beberapa kasus dapat lebih baik daripada metode
konvensional (Djawahir, 1992). Oleh karena itu diharapkan bahwa penggunaan GPS
untuk penentuan TDT kedepan lebih dominan dibandingkan dengan pengukuran
menggunakan metode konvensional.
Dammalage (2006) melakukan penelitian tentang teknologi NTRIP
menggunakan receiver double frequency di Thailand. Pengukuran dilakukan dengan
metode RTK NTRIP dan RTK with radio communication menghasilkan nilai akurasi
sebesar 0,158 m dan 0,16 m dengan jarak baseline antara 5 sampai 30 km. Selain itu,
teknologi NTRIP juga mampu meningkatkan akurasi hasil pengamatan dengan
berbagai variasi jarak baseline antara base dengan rover dibandingkan dengan
metode GPS konvensional.
Penelitian terhadap deformasi akibat gempa Yogyakarta tahun 2006 yang
dilakukan oleh Abidin (2006) menyebutkan bahwa besarnya deformasi koseismik
gempa Yogyakarta 2006 berkisar antara 10 sampai 15 cm dan deformasi
pascaseismik dalam arah horisontal berkisar antara 0,3 sampai 9,1 cm. kemungkinan
besar deformasi pascaseismik tersebut akan terus berlanjut untuk beberapa tahun ke
depan.
Sahroni (2008) menyebutkan bahwa terkait pencapaian target pemerintah yang
ingin memetakan seluruh bidang tanah di Indonesia, CORS diharapkan dapat
menjadi titik dasar yang dapat digunakan dalam bidang tanah secara cepat, murah,
dan memberikan kualitas data posisi yang baik. Dengan memanfaatkan CORS
sebagai kerangka referensi diharapkan dapat menangani berbagai permasalahan yang
timbul dari pelaksanaan pengukuran dengan titik-titik dasar sebelumnya. Selain itu
CORS juga dapat memberikan posisi bidang tanah yang terdefinisi dalam kerangka
referensi global, sehingga setiap bidang tanah yang terdaftar memiliki satu sistem
referensi yang sama.
Menurut Hersanto (2010), ketelitian pengukuran TDT orde 4 menggunakan
GPS CORS metode RTK NTRIP dapat mencapai ketelitian yang disyaratkan untuk
5
melakukan pengukuran TDT orde 4 dengan menggunakan GPS dimana ketelitian
yang dihasilkan oleh pengukuran menggunakan GPS CORS adalah 2,45 cm.
Penelitian terhadap CORS oleh Aries (2010) menggunakan metode pengukuran
RTK NTRIP dengan sampling rate 1 detik selama 15 detik dengan base station
GMU1 untuk studi pemetaan titik batas bidang tanah. Hasil dari penelitian tersebut
adalah pengukuran RTK NTRIP dengan solusi fixed menghasilkan akurasi sebesar
0,015 m, sedangkan untuk solusi float menghasilkan akurasi sebesar 0,076 m.
Penelitian oleh Mahyeda (2011) yang membandingkan metode radial dengan
metode RTK NTRIP pada baseline pendek, yaitu kurang dari 20 km. Hasil dari
penelitian ini adalah pada kasus baseline pendek, penentuan posisi metode radial
menghasilkan ketelitian yang lebih tinggi dibandingkan dengan metode RTK NTRIP
yaitu sebesar 0,010 m dan 0,022 m untuk keakuratan posisi horisontal dan vertikal
metode radial, serta 0,023 m dan 0,195 m untuk metode RTK NTRIP.
Penelitian oleh Musaura (2012) yang memanfaatkan GNSS CORS metode
rapid static dengan mode radial untuk penentuan TDT orde 3 di Kabupaten Bantul.
Hasil dari penelitian ini adalah terjadi pergeseran pada TDT yang diukur, dengan
pergeseran rata-rata sebesar 0,892 m dengan arah pergeseran utara-timur rata-rata
sebesar 25o51’4,069”.
I.7. Landasan Teori
BPN telah membuat TDT dengan klasifikasi orde 2, orde 3, dan orde 4 guna
membantu pengikatan bidang tanah sesuai Petunjuk Teknis PMNA/Ka.BPN Nomor
3 Tahun 1997. TDT tersebut membentuk suatu Kerangka Dasar Kadastral Nasional
(KDKN). Dalam memperoleh hasil ukuran TDT dapat dilakukan dengan metode
terestris ataupun metode ekstra-terestris.
Dengan semakin berkembangnya teknologi, maka pengukuran metode ekstra-
terestris dapat dilakukan dengan receiver GNSS metode RTK NTRIP. Dalam metode
RTK NTRIP, streaming data dilakukan secara real time melalui internet protocol.
Ketelitian dari metode ini dapat diketahui dari nilai HRMS hasil pengukuran.
6
I.7.1. TDT dan peta dasar teknik
TDT merupakan titik yang mempunyai koordinat yang diperoleh dari suatu
pengukuran dan perhitungan dalam suatu sistem tertentu yang berfungsi sebagai titik
kontrol atau titik ikat untuk keperluan pengukuran dan rekonstruksi batas (Pasal 1
Butir 13 PP Nomor 24 Tahun 1997).
I.5.1.1. Titik Dasar Teknik (TDT) orde 3. TDT orde 3 merupakan titik dasar
yang mempunyai kerapatan ± 1 s.d 2 kilometer, menggunakan sistem koordinat
Transverse Mercator nasional dengan lebar zone 3o (TM-3o) dan menggunakan
datum WGS 1984 sebagai bidang referensinya (Pasal 3 Juknis PMNA/Ka. BPN No 3
Tahun 1997). Spesifikasi teknis pengukuran TDT Orde 3 menurut Juknis PMNA/Ka.
BPN No 3 Tahun 1997 adalah sebagai berikut:
1. Metode pengamatan : survei GPS.
2. Lama pengamatan per sesi (minimum) : 1 jam.
3. Data pengamatan utama untuk penentuan posisi : fase satu frekuensi.
4. Metode pengamatan : jaring.
5. Interval pengamatan : 15 detik.
6. Nilai PDOP yang diperlukan : lebih kecil dari 10.
7. Elevasi satelit minimum : 15o.
8. Tipe receiver GPS : geodetic single frequency.
Hal-hal yang harus diperhatikan dalam pengamatan TDT orde 3 menggunakan
satelit GNSS yaitu :
1. Mempunyai ruang pandang langit bebas ke segala arah di atas elevasi 15o.
2. Jauh dari obyek-obyek relatif yang mudah memantulkan sinyal GPS.
Pemasangan antena juga harus mempunyai tinggi lebih dari 0,3 meter, hal ini
untuk meminimalkan terjadinya multipath.
3. Jauh dari obyek-obyek yang mampu menimbulkan gangguan gelombang
elektris terhadap penerimaan.
I.5.1.2. Peta dasar teknik. Peta dasar teknik adalah peta yang memuat
penyebaran titik-titik dasar teknik dalam cakupan wilayah tertentu (Pasal 1 butir 7
PMNA No 2 Tahun 1996). Pada pembuatan peta dasar teknik ini menggunakan
aturan yaitu : ukuran muka peta adalah 80 cm x 80 cm, dilengkapi informasi tentang
peta tersebut yang berisi judul, arah utara, skala peta, legenda, instansi pembuat,
7
jumlah lembar, bagian pengesahan, instansi pelaksana. Selain itu, pembuatan peta
dasar teknik dibuat sesuai dengan ketentuan yang tertulis pada PMNA/Ka. BPN No 3
Tahun 1997 sebagai berikut:
1. Penomoran TDT :
a. TDT orde 2 diberi nomor yang unik sebanyak 5 digit yang terdiri atas 2
digit kode propinsi dan 3 digit nomer urut. Contoh : 13.xxx untuk propinsi
DIY.
b. TDT orde 3 diberi nomor yang unik sebanyak 7 digit yang terdiri atas 2
digit kode propinsi, 2 digit kode kabupaten/kotamadya dan 3 digit nomer
urut. Contoh : 13.01.xxx untuk kodya Yogyakarta.
c. TDT orde 4 diberi nomer yang unik berdasarkan wilayah desa/kelurahan
yang sebanyak 3 digit.
2. Persebaran TDT dapat dipetakan dalam peta topografi atau peta lainnya yang
ada.
3. Untuk TDT lokal, persebarannya dipetakan dalam skala besar meliputi satu
wilayah desa/kelurahan.
4. Nomer lembar peta yang digunakan untuk peta dasar teknik mengikuti nomer
lembar peta asalnya.
5. Simbol-simbol TDT:
a. TDT orde 0 dan orde 1 dipetakan dengan simbol segiempat dengan
panjang sisi 3 mm, dan diberi warna hitam.
b. TDT orde 2 dipetakan dengan simbol segitiga dengan panjang sisi 3 mm,
dan diberi warna hitam.
c. TDT orde 3 dipetakan dengan simbol segitiga dengan panjang sisi 3 mm.
d. TDT orde 4 Nasional dipetakan dengan simbol lingkaran yang bergaris
tengah 3 mm, sedangkan TDT Lokal dipetakan dengan simbol lingkaran
yang bergaris tengah 3 mm yang diberi warna hitam.
e. TDT orde perapatan dipetakan dengan simbol segiempat dengan panjang
sisi 3 mm.
8
I.7.2. GNSS
Menurut Roberts (2004) mengatakan bahwa GNSS (Global Navigation
Satellite System) merupakan suatu sistem navigasi dan penentuan posisi geospasial
(bujur, lintang, dan ketinggian) dan waktu dengan cakupan dan referensi global yang
menyediakan informasi posisi dengan ketelitian yang bervariasi, yang diperoleh dari
waktu tempuh sinyal radio yang dipancarkan dari satelit ke receiver. Beberapa satelit
navigasi yang merupakan bagian dari GNSS dimiliki dan dikelola oleh beberapa
negara, seperti GPS (Global Positioning System) milik Amerika, GLONASS milik
Rusia, GALILEO milik Uni Eropa, COMPASS milik China, IRNSS (Indian
Regional Navigation Satellite System) milik India, dan QZSS (Quasi-Zenith Satellite
System) milik Jepang (Rizos, 2000). Penjelasan satelit GNSS dari berbagai negara
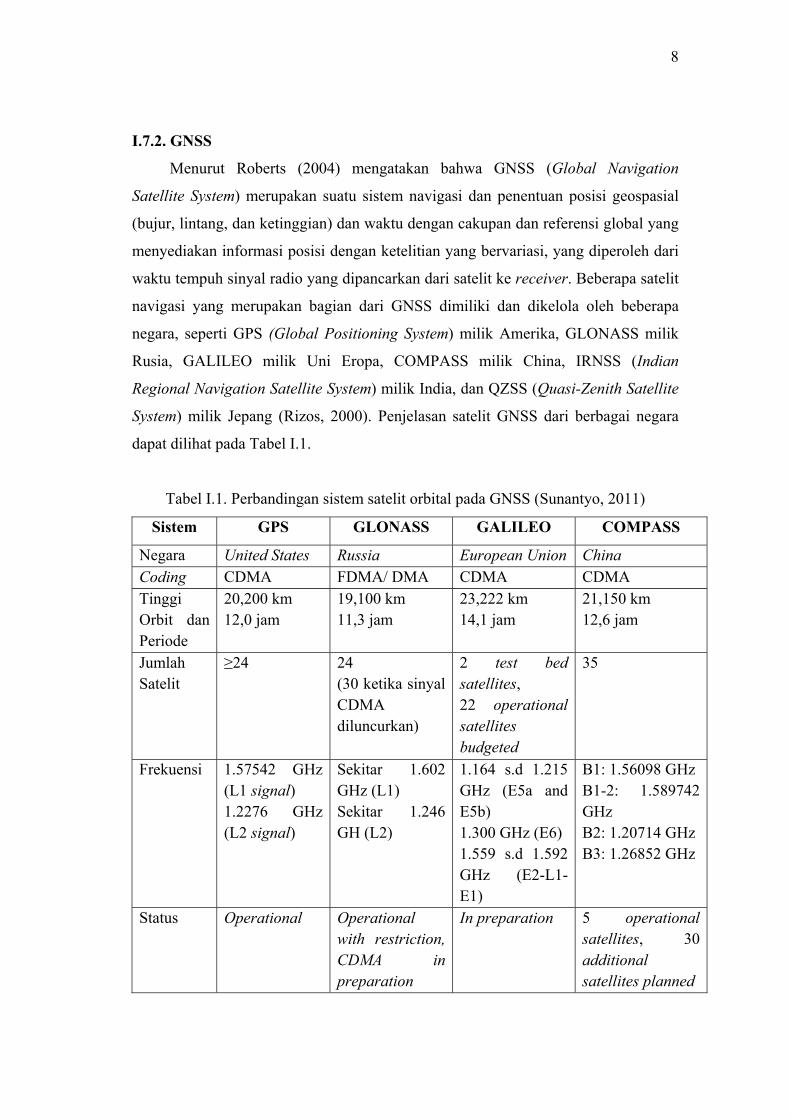
dapat dilihat pada Tabel I.1.
Tabel I.1. Perbandingan sistem satelit orbital pada GNSS (Sunantyo, 2011)
Sistem GPS GLONASS GALILEO COMPASS
Negara United States Russia European Union China Coding CDMA FDMA/ DMA CDMA CDMA Tinggi Orbit dan Periode
20,200 km 12,0 jam
19,100 km 11,3 jam
23,222 km 14,1 jam
21,150 km 12,6 jam
Jumlah Satelit
≥24 24 (30 ketika sinyal CDMA diluncurkan)
2 test bed satellites, 22 operational satellites budgeted
35
Frekuensi 1.57542 GHz (L1 signal) 1.2276 GHz (L2 signal)
Sekitar 1.602 GHz (L1) Sekitar 1.246 GH (L2)
1.164 s.d 1.215 GHz (E5a and E5b) 1.300 GHz (E6) 1.559 s.d 1.592 GHz (E2-L1- E1)
B1: 1.56098 GHz B1-2: 1.589742 GHz B2: 1.20714 GHz B3: 1.26852 GHz
Status Operational Operational with restriction, CDMA in preparation
In preparation 5 operational satellites, 30 additional satellites planned
9
GPS (Global Positioning System) adalah sistem navigasi dan penentuan posisi
berbasis satelit yang dapat digunakan oleh banyak orang sekaligus dalam segala
cuaca. GPS didesain untuk memberikan posisi dan kecepatan tiga dimensi yang teliti
dan juga informasi waktu secara kontinyu di seluruh dunia (Abidin, 2007). GPS
pertama kali dikembangkan oleh Departemen Pertahanan Amerika Serikat. Satelit-
satelit GPS beredar mengelilingi bumi jauh di atas permukaan bumi yaitu pada
ketinggian sekitar 20.200 km dimana satelit tersebut berputar mengelilingi bumi
dengan periode 11 jam 58 menit. GPS telah banyak dimanfaatkan dalam berbagai
bidang aplikasi, termasuk untuk keperluan survei dan pemetaan. Mengingat GPS
cukup baik untuk membuktikan kepemilikan hak atas tanah, GPS memiliki prospek
yang baik untuk pengembalian batas bidang tanah, baik dari segi ketelitian maupun
dalam pelaksanaan kegiatannya, dan dapat dipertimbangkan sebagai metode altenatif
untuk keperluan tersebut.
I.5.3.1. Sinyal satelit GPS. Menurut Sunantyo (2003), pada dasarnya sinyal
GPS dapat dibagi menjadi 3 komponen, yaitu:
1. Penginformasian jarak (kode) yang berupa kode C/A (clear access atau course
acquisition) dan kode P (Private atau Precise). Kode C/A mewakili ephemeris
standar dari satelit dan memiliki frekuensi yang sama 10,23 MHz, sedangkan
kode P mewakili ephimeris yang teliti dan hanya memiliki 1/10 dari frekuensi
yaitu 1,023 MHz (Weston dan Schweiger).
2. Penginformasian posisi satelit (navigation message) yang direpresentasikan
dalam bentuk modulasi L1 dan L2. Penginformasi posisi satelit menjadi pesan
navigasi yang terdiri dari prediksi satelit ephimeris, koreksi parameter jam
satelit, dan informasi status sistem GPS.
3. Gelombang pembawa (carrier wave) L1 dan L2. Gelombang L1 memiliki
frekuensi 154 kali frekuensi dasar yaitu 1575,42 MHz dengan panjang
gelombang 19 cm dan menggunakan kode P, C/A, dan D. Sedangkan
gelombang L2 memiliki frekuensi 120 kali frekuensi dasar yaitu 1227,6 GHz
dengan panjang gelombang 24 cm dan menggunakan kode P.
Ada dua besaran yang diperoleh dalam pengamatan satelit GPS, yaitu pseudo
range dan carrier beat phase yang dapat digunakan untuk menghitung jarak dari
10
receiver ke satelit GPS.
1. Pseudorange adalah jarak hasil hitungan oleh receiver GPS dari data ukuran
waktu perambatan sinyal satelit ke receiver dengan membandingkan
membandingkan kode yang diterima dari satelit dengan replika kode yang
diformulasikan dalam receiver. Abidin (2000) menyatakan bahwa waktu yang
digunakan untuk mengimpitkan kedua kode tersebut adalah waktu yang
diperlukan oleh kedua kode tersebut untuk menempuh jarak dari satelit ke
pengamat. Akan tetapi jarak yang dihitung menggunakan pseudorange masih
memiliki kesalahan waktu akibat tidak sinkronnya antara jam pada satelit
dengan jam pada receiver.
2. Carrier beat phase adalah fase yang diukur oleh receiver GPS dengan cara
mengurangkan fase sinyal pembawa yang datang dari satelit dengan sinyal
serupa yang dibangkitkan dalam receiver. Data fase pengamatan satelit GPS
adalah jumlah gelombang penuh yang terhitung sejak saat pengamatan dimulai
(Djawahir, 1992).
I.5.3.2. Penentuan posisi dengan GPS. Konsep penentuan posisi dengan GPS
adalah space resection (pengikatan ke belakang) dengan jarak, yaitu dengan
mengukur jarak ke beberapa satelit GPS yang telah diketahui koordinatnya secara
simultan. Penentuan posisi GPS dilakukan dengan metode absolut dan metode relatif.
1. Penentuan posisi GPS dengan metode absolut. Penentuan posisi metode absolut
merupakan metode penentuan posisi GPS yang paling mendasar, disebut juga
dengan point positioning. Ketelitian yang dihasilkan dengan metode absolut
tidak begitu tinggi, karena pada umumnya metode ini menggunakan data
pseudorange, ataupun carrier beat phasecarrier beat phase yang telah
diketahui cycle ambiguity nya.
2. Penentuan posisi GPS dengan metode relatif. Penentuan posisi metode relatif
adalah metode penentuan posisi dengan cara menentukan vektor jarak antara
dua stasiun pengamat. Vektor jarak ini lebih dikenal dengan jarak basis
(baseline). Penentuan posisi dengan metode relatif sering disebut juga dengan
penentuan posisi secara diferensial (differential positioning) atau Differential
Global Positioning System (DGPS). Pada metode relatif, data ukuran
pengamatan dapat berupa data pseudorange maupun carrier beat phase. Pada
11
penentuan posisi teliti cenderung menggunakan data carrier beat phase (Leick,
1995).
Penentuan posisi GPS metode relatif memiliki ketelitian yang relatif tinggi
karena data yang digunakan berupa data pseudorange dan/atau data fase dengan
pengurangan data yang diamat oleh dua receiver GPS secara bersamaan. Dengan
adanya proses pengurangan data, kesalahan jam receiver dan satelit dapat
dihilangkan, serta kesalahan dan bias troposfer, ionosfer, atau ephemeris dapat
direduksi.
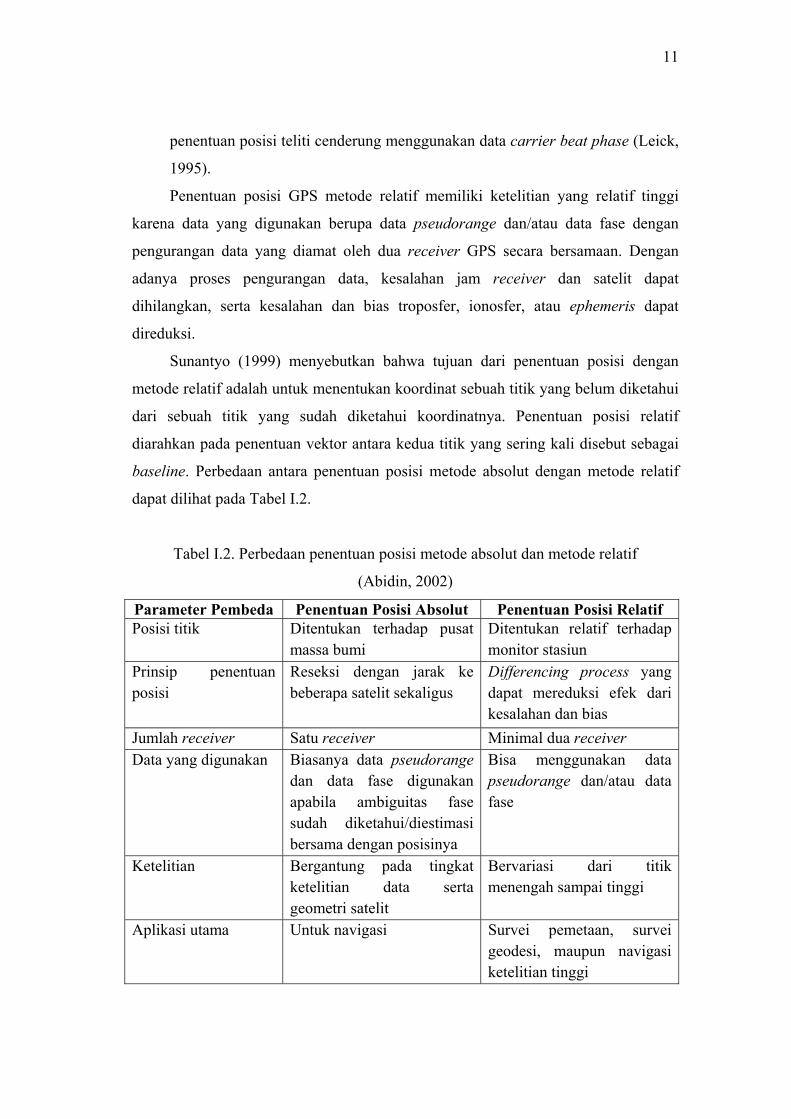
Sunantyo (1999) menyebutkan bahwa tujuan dari penentuan posisi dengan
metode relatif adalah untuk menentukan koordinat sebuah titik yang belum diketahui
dari sebuah titik yang sudah diketahui koordinatnya. Penentuan posisi relatif
diarahkan pada penentuan vektor antara kedua titik yang sering kali disebut sebagai
baseline. Perbedaan antara penentuan posisi metode absolut dengan metode relatif
dapat dilihat pada Tabel I.2.
Tabel I.2. Perbedaan penentuan posisi metode absolut dan metode relatif
(Abidin, 2002)
Parameter Pembeda Penentuan Posisi Absolut Penentuan Posisi Relatif Posisi titik Ditentukan terhadap pusat
massa bumi Ditentukan relatif terhadap monitor stasiun
Prinsip penentuan posisi
Reseksi dengan jarak ke beberapa satelit sekaligus
Differencing process yang dapat mereduksi efek dari kesalahan dan bias
Jumlah receiver Satu receiver Minimal dua receiver Data yang digunakan Biasanya data pseudorange
dan data fase digunakan apabila ambiguitas fase sudah diketahui/diestimasi bersama dengan posisinya
Bisa menggunakan data pseudorange dan/atau data fase
Ketelitian Bergantung pada tingkat ketelitian data serta geometri satelit
Bervariasi dari titik menengah sampai tinggi
Aplikasi utama Untuk navigasi Survei pemetaan, survei geodesi, maupun navigasi ketelitian tinggi
12
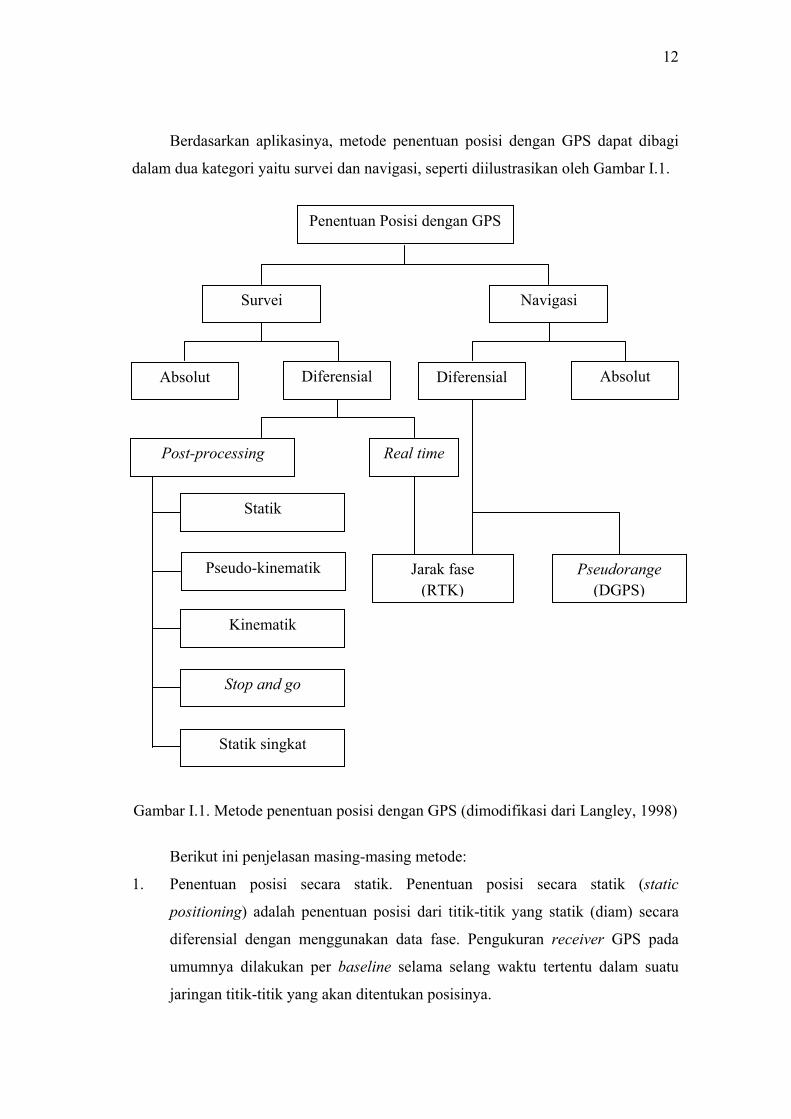
Berdasarkan aplikasinya, metode penentuan posisi dengan GPS dapat dibagi
dalam dua kategori yaitu survei dan navigasi, seperti diilustrasikan oleh Gambar I.1.
Gambar I.1. Metode penentuan posisi dengan GPS (dimodifikasi dari Langley, 1998)
Berikut ini penjelasan masing-masing metode:
1. Penentuan posisi secara statik. Penentuan posisi secara statik (static
positioning) adalah penentuan posisi dari titik-titik yang statik (diam) secara
diferensial dengan menggunakan data fase. Pengukuran receiver GPS pada
umumnya dilakukan per baseline selama selang waktu tertentu dalam suatu
jaringan titik-titik yang akan ditentukan posisinya.
Statik
Pseudo-kinematik
Kinematik
Stop and go
Statik singkat
Navigasi Survei
Jarak fase (RTK)
Pseudorange (DGPS)
Penentuan Posisi dengan GPS
Absolut Diferensial Diferensial Absolut
Real time Post-processing
13
2. Penentuan posisi secara RTK. RTK merupakan penentuan posisi secara
diferensial menggunakan data fase. Pada dasarnya, pengamatan dengan metode
real time menggunakan satu receiver berada pada stasiun referensi yang
koordinatnya telah diketahui. Receiver tersebut mengamati satelit GPS secara
terus menerus, yang kemudian dengan menggunakan komunikasi tertentu, data
koordinat serta koreksi pseudorange maupun fase dikirim secara kontinyu
kepada satu atau lebih receiver rover untuk memperoleh posisi secara real time
relatif terhadap stasiun referensi (Abidin, 2000). Dalam penggunaan sistem
RTK mempunyai tiga komponen penting:
a. Stasiun referensi atau base station, terdiri dari receiver dan antenna. Base
station berfungsi untuk mengolah data diferensial dan melakukan koreksi
carrier phase yang dikirim via radio modem dari base station ke rover.
Koreksi yang dihasilkan receiver pada base station masih dalam bentuk
digital dan tidak dapat langsung dikirimkan ke stasiun rover, sehingga
perlu diubah dalam bentuk gelombang radio.
b. Stasiun rover, berfungsi untuk mengidentifikasi satelit-satelit pada daerah
pengukuran dan menerima data diferensial dan koreksi carrier phase dari
base station via radio link dengan radio modem. Koreksi carrier phase
yang diterima oleh stasiun rover digunakan untuk mendapatkan posisi
yang teliti.
c. Data link (hubungan data) diferensial, berfungsi untuk mengirimkan data
diferensial dan koreksi carrier phase dari base station ke rover melalui
radio modem yang memanfaatkan band frekuensi UHF (Ultra High
Frequency), VHF (Very High Frequency) ataupun HF (High Frequency)
selain itu juga dapat memanfaatkan modem telepon dan GSM.
Ketelitian tipikal posisi yang diberikan oleh sistem RTK adalah sekitar 1
sampai dengan 5 cm, dengan asumsi ambiguitas fase dapat ditentukan secara
benar (Abidin, 2000). Menurut Diggelen (1997), ada 3 jenis solusi pengukuran
pada metode RTK, yaitu:
a. Fixed. Receiver sudah terhubung dengan base station, memiliki ketelitian
posisi 1 sampai dengan 5 cm, ambiguitas fase sudah terkoreksi, jumlah
satelit yang ditangkap > 4, dan bias multipath sudah terkoreksi.
14
b. Float. Receiver sudah terhubung dengan base station, memiliki ketelitian
posisi > 5 cm, ambiguitas fase belum terkoreksi, jumlah satelit yang
ditangkap ≤ 4 (too few satellite), bias multipath belum terkoreksi.
c. Standalone. Receiver tidak terhubung dengan base station, memiliki
ketelitian posisi > 1 m, ambiguitas fase belum terkoreksi, jumlah satelit
yang ditangkap ≤ 4 (too few satellite), bias multipath belum terkoreksi.
I.5.3.3. Kesalahan GPS. Abidin (2000) menyebutkan bahwa kesalahan GPS
dapat dikelompokkan menjadi 5, yaitu:
1. Kesalahan dari satelit, yang terdiri dari:
a. Ketidakpastian ephemeris. Kesalahan yang muncul karena orbit satelit
yang disampaikan oleh ephemeris tidak sama dengan orbit satelit yang
sebenarnya.
b. Ketidakpastian jam satelit. Ketidakpastian jam satelit dapat menyebabkan
kesalahan yang bisa mencapai 300 km.
c. Selective availability. Penerapan kesalahan orbit yang disengaja.
2. Kesalahan dari medium propagasi
a. Bias troposfer. Ketebalan lapisan troposfer yang berkisar antara 9 s.d 16
km dapat berpengaruh terhadap sinyal GPS yang melewatinya, dimana
sinyal GPS mengalami refraksi yang menyebabkan perubahan arah dan
kecepatan sinyal GPS.
b. Bias ionosfer. Kandungan elektron pada lapisan ionosfer dapat
mempengaruhi propagasi sinyal GPS dalam kaitannya dengan kecepatan,
arah, polarisasi, dan kekuatan sinyal GPS yang melaluinya.
3. Kesalahan pada receiver GPS
a. Ketidakpastian jam receiver.
b. Koordinat stasiun GPS.
c. Kesalahan yang terkait dengan antenna.
d. Noise.
4. Kesalahan pada data pengamatan
a. Ambiguitas fase. Jumlah gelombang penuh yang tidak terukur oleh
receiver GPS.
b. Cycle slips. Ketidakkontinyuan jumlah gelombang penuh dari fase
15
pembawa gelombang yang diukur karena pengamatan sinyal oleh receiver
terputus.
5. Lingkungan sekitar receiver GPS
a. Multipath. Fenomena sinyal dari satelit GPS menuju receiver melewati
dua atau lebih lintasan (path) yang berbeda.
b. Imaging
I.7.3. Datum GNSS
Datum merupakan sekumpulan parameter yang mendefinisikan suatu sistem
koordinat dan menyatakan posisinya terhadap permukaan bumi atau lebih dikenal
sebagai Sistem Referensi Terestris. Hal ini mengacu pada penyelenggaraan datum,
yaitu dengan menetapkan suatu elipsoid acuan dan orientasinya terhadap geoid
(bumi) pada suatu lokasi yang dipetakan. Suatu datum ditentukan oleh sebuah
elipsoid yang mendekati bentuk bumi dan posisi elipsoid relatif terhadap pusat bumi.
WGS84 (World Geodetic System 1984) adalah datum geodetik yang
menggunakan elipsoid referensi yang sesuai dengan bentuk geoid seluruh permukaan
bumi dengan pusat elipsoid terletap pada pusat massa bumi. WGS84 digunakan
sebagai sistem referensi dalam penentuan posisi dengan menggunakan GPS.
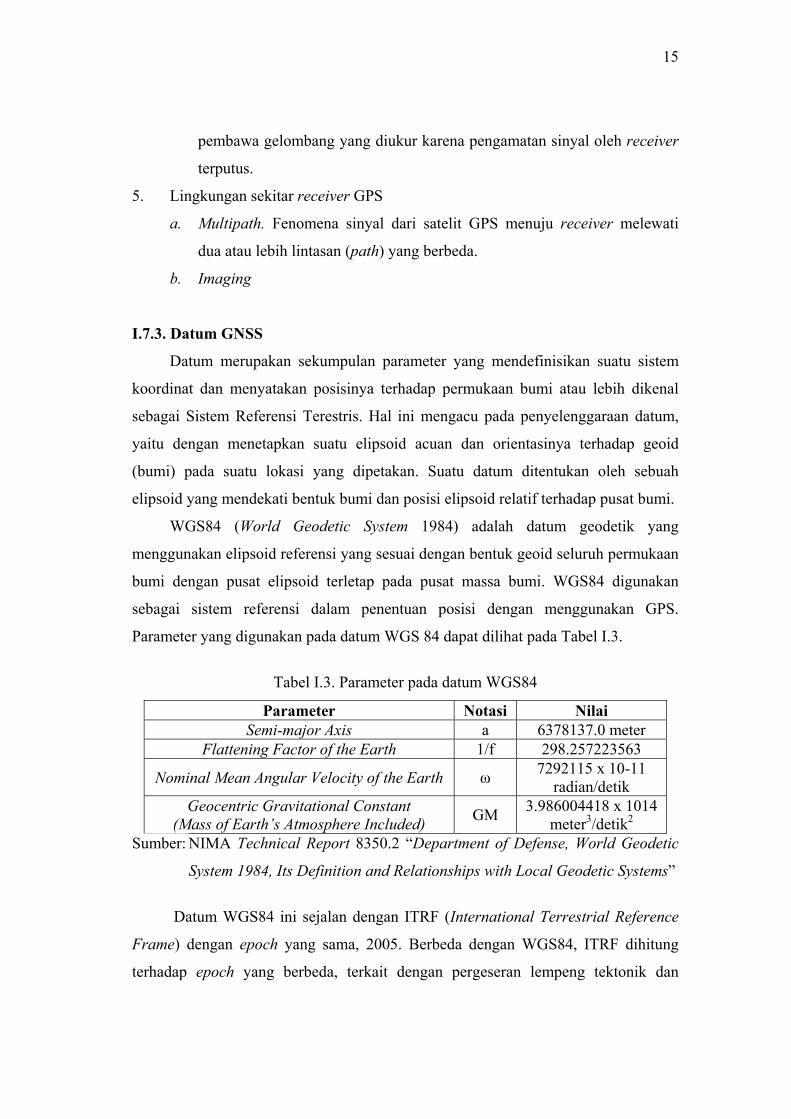
Parameter yang digunakan pada datum WGS 84 dapat dilihat pada Tabel I.3.
Tabel I.3. Parameter pada datum WGS84
Parameter Notasi Nilai Semi-major Axis a 6378137.0 meter
Flattening Factor of the Earth 1/f 298.257223563
Nominal Mean Angular Velocity of the Earth ω 7292115 x 10-11 radian/detik
Geocentric Gravitational Constant (Mass of Earth’s Atmosphere Included) GM 3.986004418 x 1014
meter3/detik2 Sumber: NIMA Technical Report 8350.2 “Department of Defense, World Geodetic
System 1984, Its Definition and Relationships with Local Geodetic Systems”
Datum WGS84 ini sejalan dengan ITRF (International Terrestrial Reference
Frame) dengan epoch yang sama, 2005. Berbeda dengan WGS84, ITRF dihitung
terhadap epoch yang berbeda, terkait dengan pergeseran lempeng tektonik dan
16
deformasi. Penggunaan datum ITRF didasarkan pada bentuk muka bumi yang
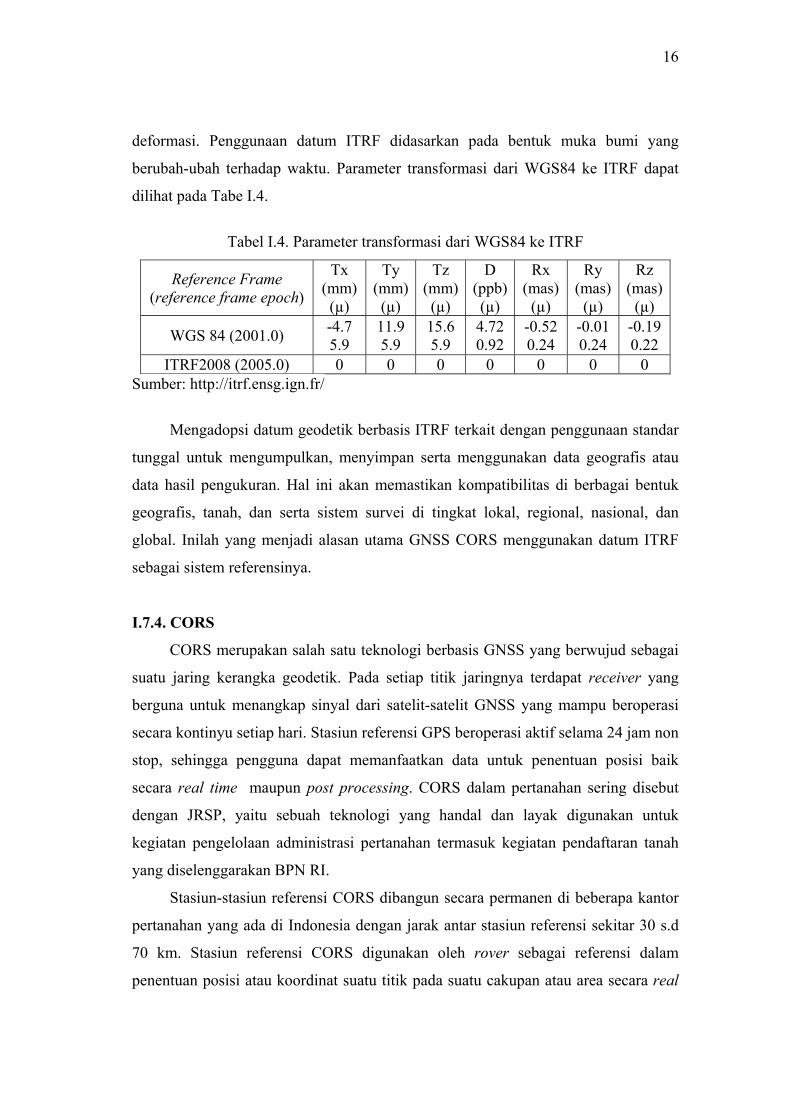
berubah-ubah terhadap waktu. Parameter transformasi dari WGS84 ke ITRF dapat
dilihat pada Tabe I.4.
Tabel I.4. Parameter transformasi dari WGS84 ke ITRF
Reference Frame (reference frame epoch)
Tx (mm) (µ)
Ty (mm) (µ)
Tz (mm) (µ)
D (ppb) (µ)
Rx (mas)
(µ)
Ry (mas)
(µ)
Rz (mas)
(µ)
WGS 84 (2001.0) -4.7 5.9
11.9 5.9
15.6 5.9
4.72 0.92
-0.52 0.24
-0.01 0.24
-0.19 0.22
ITRF2008 (2005.0) 0 0 0 0 0 0 0 Sumber: http://itrf.ensg.ign.fr/
Mengadopsi datum geodetik berbasis ITRF terkait dengan penggunaan standar
tunggal untuk mengumpulkan, menyimpan serta menggunakan data geografis atau
data hasil pengukuran. Hal ini akan memastikan kompatibilitas di berbagai bentuk
geografis, tanah, dan serta sistem survei di tingkat lokal, regional, nasional, dan
global. Inilah yang menjadi alasan utama GNSS CORS menggunakan datum ITRF
sebagai sistem referensinya.
I.7.4. CORS
CORS merupakan salah satu teknologi berbasis GNSS yang berwujud sebagai
suatu jaring kerangka geodetik. Pada setiap titik jaringnya terdapat receiver yang
berguna untuk menangkap sinyal dari satelit-satelit GNSS yang mampu beroperasi
secara kontinyu setiap hari. Stasiun referensi GPS beroperasi aktif selama 24 jam non
stop, sehingga pengguna dapat memanfaatkan data untuk penentuan posisi baik
secara real time maupun post processing. CORS dalam pertanahan sering disebut
dengan JRSP, yaitu sebuah teknologi yang handal dan layak digunakan untuk
kegiatan pengelolaan administrasi pertanahan termasuk kegiatan pendaftaran tanah
yang diselenggarakan BPN RI.
Stasiun-stasiun referensi CORS dibangun secara permanen di beberapa kantor
pertanahan yang ada di Indonesia dengan jarak antar stasiun referensi sekitar 30 s.d
70 km. Stasiun referensi CORS digunakan oleh rover sebagai referensi dalam
penentuan posisi atau koordinat suatu titik pada suatu cakupan atau area secara real
17
time menggunakan receiver GNSS. Jaringan stasiun CORS dikontrol dari jarak jauh
dan diawasi menggunakan sistem otomatis, serta dilakukan pemantauan posisi yang
diperbarui secara periodik. Sistem CORS terintegrasi dengan International Earth
Rotation and Reference SystemService (IERSS), sehingga memberikan posisi yang
bereferensi global dan datanya dapat diakses lewat internet oleh pengguna (Yustia
2008).
Prinsip kerja JRSP secara umum, stasiun-stasiun referensi merekam data dari
satelit GNSS secara kontinyu yang kemudian disimpan dan/atau dikirim ke server
atau pusat kontrol JRSP melalui jaringan internet secara serempak. Tanpa adanya
jaringan referensi satelit, hasil koordinat yang dihasilkan rover adalah posisi absolut
dengan ketelitian 5 s.d 20 meter. Dengan adanya jaringan satelit ini, hasil koordinat
dari receiver GNSS yang berperan sebagai rover akan dikoreksi dengan hasil
hitungan yang didapat melalui sistem algoritma dari data JRSP. Metode pengukuran
Network Real Time Kinematic (NRTK) dapat dihasilkan ketelitian yang memadai
untuk kegiatan pengukuran dan pemetaan pertanahan.
Data yang dikirim oleh stasiun referensi adalah data dalam format raw data
atau data mentah. Data mentah dari stasiun referensi digunakan oleh server atau
pusat kontrol JRSP sebagai bahan untuk koreksi data yang dapat digunakan oleh
rover. Data raw tersebut dikirimkan secara kontinyu dalam interval tertentu kepada
server JRSP. Data raw dikirim melaui jaringan internet untuk disimpan dan diolah
dalam bentuk Receiver Independent Exchange Format (RINEX) yang dapat
digunakan untuk post-processing, ataupun dalam bentuk Radio Technical
Commission for Maritime Services (RTCM) yang dikirimkan kepada rover yang
membutuhkan koreksi data dari stasiun referensi secara real time. Data yang diamat
menggunakan rover dapat diatur sesuai dengan keperluan, dengan sampling rate per
1 detik, 5 detik, 10 detik, 15 detik, dan 30 detik.
I.7.5. NTRIP
NTRIP (Networked Transportation of RTCM via Internet Protocol) merupakan
koreksi data melalui internet secara real time. Sistem ini menggunakan internet untuk
streaming dan sharing data koreksi DGPS untuk memperoleh posisi yang teliti. Hal
ini memungkinkan pengguna DGPS atau RTK melakukan koreksi data melalui
18
koneksi sebuah modem (via internet) melalui GPRS atau teknologi komunikasi yang
lainnya dan mengambil data pengukuran untuk meningkatkan akurasi (Lenz, 2004).
Teknologi komunikasi lain yang dimaksud adalah GSM, GPRS (2,5G), EDGE
(2,75G), dan UMTS (3G).
Menurut Pedoman dan Petunjuk Teknis JRSP (2009), GSM merupakan
jaringan seluler publik yang menggunakan teknik untuk multi plexing dan
menggunakan transmisi band 900 MHz. GSM merupakan standar yang diakui dunia
dan dapat menyediakan jasa selain telepon, yaitu komunikasi data di dalam sirkuit
dan/atau package mode. Sedangkan GPRS (General Packet Radio Service) adalah
sistem komunikasi global yang dapat melakukan komunikasi data dengan kecepatan
akses antara 9.600 hingga 14.400 bits per second (bps) dengan menambah kompresi
data. Dengan GPRS, transmisi data secara mobile dapat dilakukan dengan cepat
hingga 115 kbps dengan menggunakan infrastruktur base station GSM yang ada.
Enhanced Datarate for Global Evolution (EDGE) adalah skema modulasi baru
yang menggunakan bandwidth yang lebih efisien dari standar yang digunakan oleh
jaringan GSM (Lenz, 2004). EDGE memiliki kecepatan data sebesar 384 kbps atau
tiga kali kecepatan GPRS. Sementara UMTS (Universal Mobile Telephone System)
merupakan generasi ketiga Eropa dari sistem komunikasi seluler yang memiliki
spektrum antara 1900 s.d 2025 MHz dan 2110 s.d 2200 MHz. UMTS memiliki
kecepatan data maksimum mencapai 2 mbps (megabits per second).
NTRIP menggunakan basis protokol HyperText Transfer Protocol (HTTP).
HTTP dapat digunakan untuk memperluas streaming data GPS. Sistem NTRIP
menerapkan tiga aplikasi di dalamnya, yaitu NTRIP client, NTRIP server, dan
NTRIP caster (Lenz, 2004).
1. NTRIP client. Menerima aliran data RTCM. Dalam menerima data RTCM,
client memerlukan pengiriman parameter akses (user ID dan password) ke
NTRIP caster.
2. NTRIP server. Mengirim data RTCM ke NTRIP caster menggunakan koneksi
TCP/IP. NTRIP server mengharuskan diterima pertama oleh NTRIP caster dan
jika diizinkan dapat meneruskan data RTCM ke NTRIP caster.
3. NTRIP caster. NTRIP caster adalah sebuah server internet yang menangani
aliran data yang berbeda dari NTRIP server. NTRIP caster mengecek pesan
19
permintaan yang diterima dari NTRIP client dan server untuk melihat apakah
client dan server tersebut didaftarkan dan diijinkan untuk menerima dan
menyediakan aliran data RTCM.
I.7.6. HRMS
Sickle (2001) menyebutkan bahwa HRMS (Horizontal Root Mean Square)
adalah nilai yang merepresentasikan ketelitian posisi horisontal suatu titik. Semakin
kecil HRMS maka semakin teliti suatu pengukuran yang dilakukan. HRMS
dirumuskan dengan persamaan I.1 berikut:
HRMS = 22 σσ YX+ ........................................................................... (I.1)
Dalam hal ini:
σ x : standar deviasi posisi dari absis (cm)
σ y : standar deviasi posisi dari ordinat (cm)
I.7.7. PDOP
PDOP (Position Dilution of Precision) adalah ketelitian posisi pada koordinat
3D ditinjau dari kekuatan geometri satelit. PDOP membantu untuk mengetahui
akurasi relatif koordinat yang diberikan GPS. Ketika receiver telah melakukan
kalkulasi posisinya dari sekurang-kurangnya empat satelit, receiver tersebut
mengkalkulasi estimasi akurasi menurut geometri satelit pada saat pembacaan.
Karena posisi satelit senantiasa berubah terhadap waktu maka nilai DOP berubah
terhadap waktu. Semakin kecil nilai DOP, maka ketelitian pengukuran semakin teliti
(Sunantyo, 1999).
I.7.8. Nilai toleransi pergeseran
Tahapan hitungan yang pertama adalah menghitung berapa besar serta arah
pergeseran yang terjadi pada masing-masing titik. Besarnya pergeseran terhadap
sumbu Easting (dXi) dan pergeseran terhadap sumbu Northing (dYi) dengan
menggunakan persamaan I.2 dan I.3 berikut:
dXi = Xi – xi .............................................................................................. (I.2)
dYi = Yi – yi .............................................................................................. (I.3)
20
Arah pergeseran dapat ditentukan dengan rumus I.4 berikut ini:
Arah pergeseran = ii
ii
yYxX
arctg−−
............................................................. (I.4)
Tahap selanjutnya adalah melakukan perhitungan besarnya pergeseran horisontal
untuk masing-masing titik (dLi) dan pergeseran rata-rata (dL) dengan persamaan I.5
dan I.6:
dLi = 22 )()( iiii yYxX −+− ................................................................. (I.5)
dL = ndLi∑ .............................................................................................. (I.6)
Dalam hal ini:
(Xi , Yi) : koordinat TDT orde 3 dengan metode RTK NTRIP ke-i
(xi , yi) : koordinat TDT orde 3 buku tugu ke-i
dLi : besarnya pergeseran horisontal ke-i
dL : nilai pergeseran rata-rata
Jika besarnya pergeseran horisontal untuk masing-masing titik dan pergeseran
horisontal rata-rata sudah diketahui, maka nilai simpangan baku (σ ) dapat
ditentukan dengan rumus I.7 berikut ini:
σ = 1
)( 2
−−Σ
ndLdLi ................................................................................ (I.7)
Dalam hal ini:
σ : nilai simpangan baku
n : jumlah data
dLi : besarnya pergeseran horisontal ke-i
dL : nilai pergeseran horisontal rata-rata
Tahap selanjutnya adalah menghitung nilai toleransi pergeseran ukuran. Untuk
mengetahui interval nilai toleransi pergeseran ukuran, dapat digunakan tabel
observasi distribusi normal (tabel Z). Pada penelitian ini digunakan taraf signifikansi
5%. Untuk menentukan interval kepercayaan, terlebih dahulu dicari nilai Zα/2,
dimana α = 0,05. Nilai α disebut dengan tingkat nyata atau taraf signifikansi, yaitu
suatu nilai yang ditolerir di dalam membuat keputusan atau kesimpulan. Perhitungan
toleransi pengukuran dilakukan dengan membuat suatu interval kepercayaan dengan
21
derajat kepercayaan tertentu. Nilai simpangan baku yang diperoleh dari rumus I.8
digunakan untuk perhitungan nilai toleransi pergeseran TDT (Zhit) dengan
menggunakan rumus I.8 berikut ini:
Zhit = σ
dLdLi − ......................................................................................... (I.8)
Dengan menggunakan tabel Z (observasi distribusi normal), interval nilai toleransi
pergeseran ukuran dapat diketahui (Sugiyono, 2007). Setelah nilai Zhit diperoleh,
maka Zhit dibandingkan dengan Ztabel dengan tingkat kepercayaan yang ditentukan.
Apabila Zhit masuk dalam interval –Ztabel ≤ Zhit ≤ +Ztabel maka nilai pergeseran
masing-masing TDT orde 3 masih dalam batas toleransi.
I.7.9. Uji signifikansi dua parameter
Pengujian hipotesis pada penelitian ini menggunakan uji t two tail berdasarkan
jenis parameter statistik dengan asumsi bahwa sampel yang diambil berdistribusi
normal atau mendekati normal. Budiarto (2002) menyebutkan bahwa sampel yang
besar (n > 30), distribusi rata-rata sampel akan berdistribusi normal atau mendekati
normal.
Uji signifikansi perbedaan dua koordinat dilakukan dengan menggunakan uji
t two tail. Pengujian dilakukan setelah diperoleh nilai t hitungan pergeseran dari
masing-masing TDT orde 3. Nilai t hitungan ditentukan dengan rumus I.9 berikut ini:
thit =
nS
dL2
0μ− ................................................................................ (I.9)
Dalam hal ini:
dL : nilai pergeseran horisontal rata-rata
µ0 : nilai yang dihipotesiskan
S : nilai simpangan baku
n : jumlah data ukuran
Dari tabel-t diperoleh nilai ttabel dengan tingkat kepercayaan tertentu dan derajat
kesalahan n-1, dimana n adalah nilai parameter yang diuji. Uji-t yang dilakukan pada
penelitian ini menggunakan tingkat kepercayaan 95% dengan asumsi jika –ttabel ≤ thit
≤ +ttabel, maka H0 diterima.
22
H0 diterima berarti tidak terdapat perbedaan yang signifikan antara koordinat ukuran
GNSS CORS dengan koordinat buku tugu.
H0 ditolak berarti terdapat perbedaan yang signifikan antara koordinat ukuran GNSS
CORS dengan koordinat buku tugu.
I.8. Hipotesis
Dari penelitian yang dilakukan oleh Hersanto (2010) diperoleh bahwa
ketelitian pengamatan dengan menggunakan GNSS CORS RTK mencapai fraksi
sentimeter. Penelitian yang dilakukan oleh Musaura (2012) menyebutkan bahwa
terdapat perbedaan yang signifikan antara koordinat dalam buku tugu dengan
koordinat hasil pengukuran menggunakan GNSS CORS metode rapid static dengan
moda radial. Oleh karena itu, pengukuran TDT orde 3 dengan aplikasi GNSS CORS
RTK NTRIP diduga menghasilkan suatu koordinat yang berbeda secara signifikan
berdasarkan uji t two tail terhadap koordinat TDT orde 3 pada buku tugu.





























