Embed Size (px)
Citation preview
DIV-1
BAB IV
PEMBAHASAN DAN ANALISIS
4.1. Pembahasan
MTM (Methods Time Measurenment) adalah salah satu metode
pengukuran tidak langsung dalam menentukan waktu yang dibutuhkan seorang
operator untuk menyelesaikan suatu pekerjaan. Biasanya metode ini digunakan
untuk siklus yang berulang-ulang. Modul kali ini, praktikan melakukan perakitan
remote control yang kemudian menganalisa gerakan-gerakan yang dilakukan
dengan cara menguraikan setiap gerakan kerja yang dilakukan operator ke dalam
beberapa elemen-elemen gerakan. Penulis menggunakan kamera dalam merekam
gambar operator yang sedang melakukan perakitan remote control.
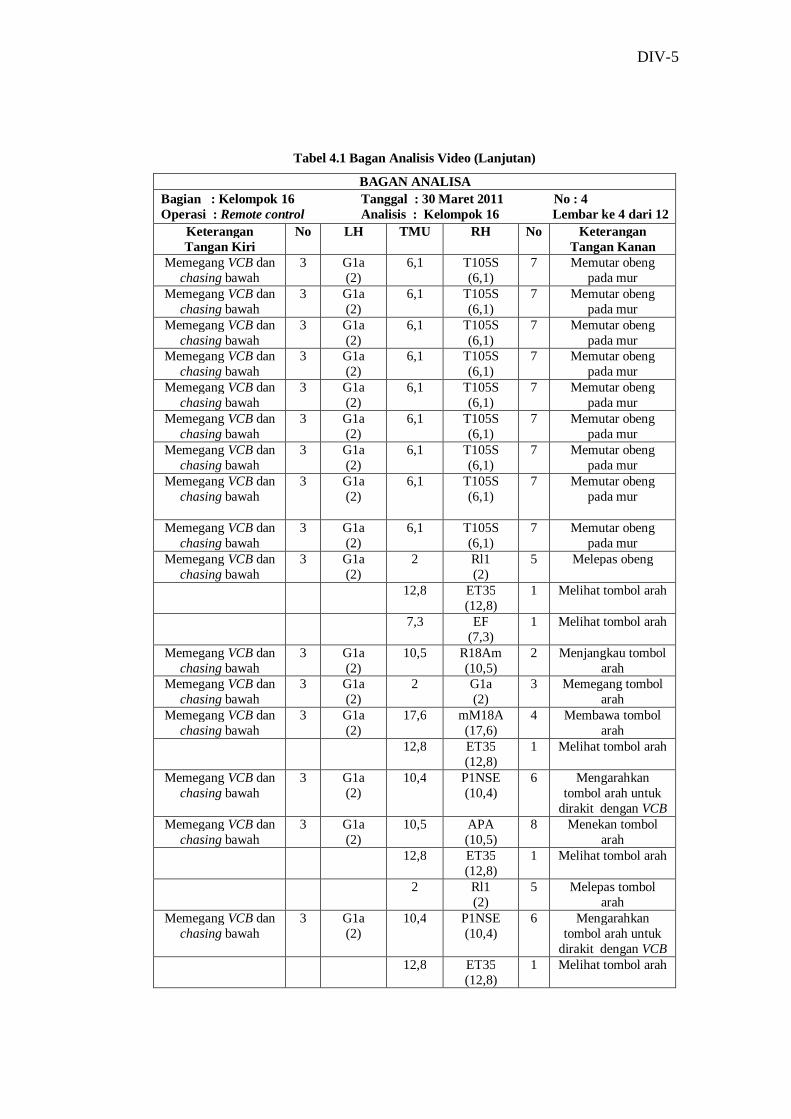
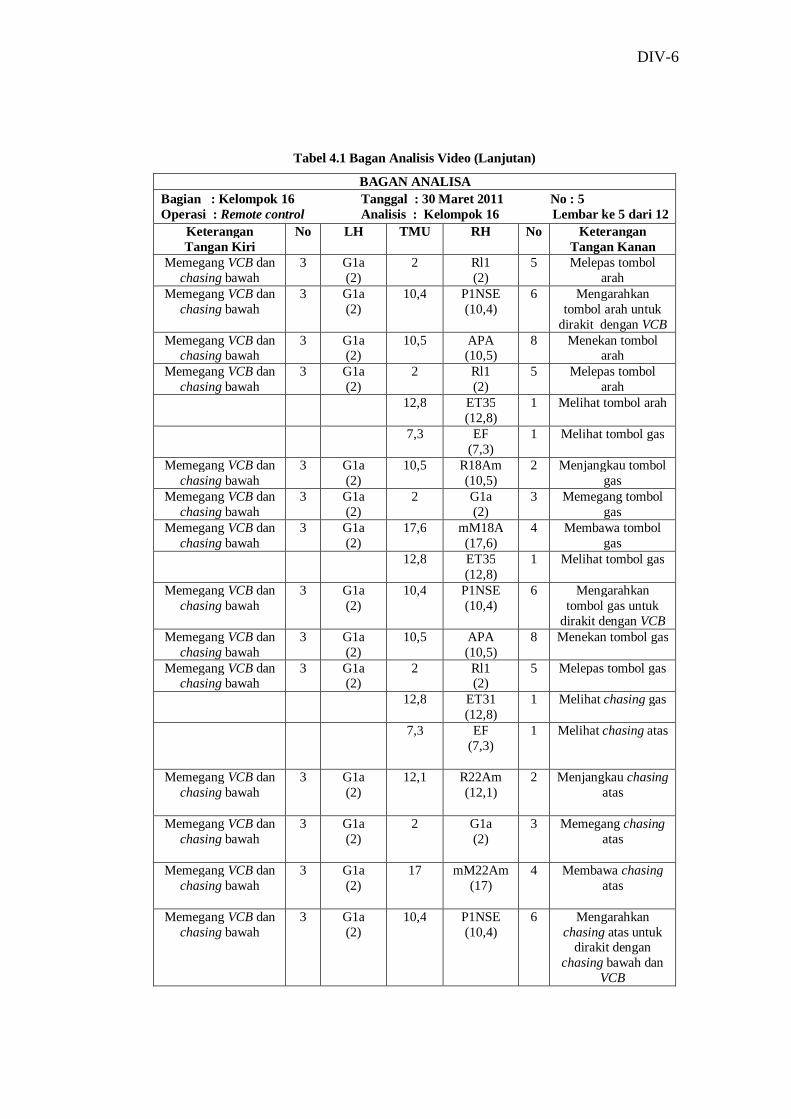
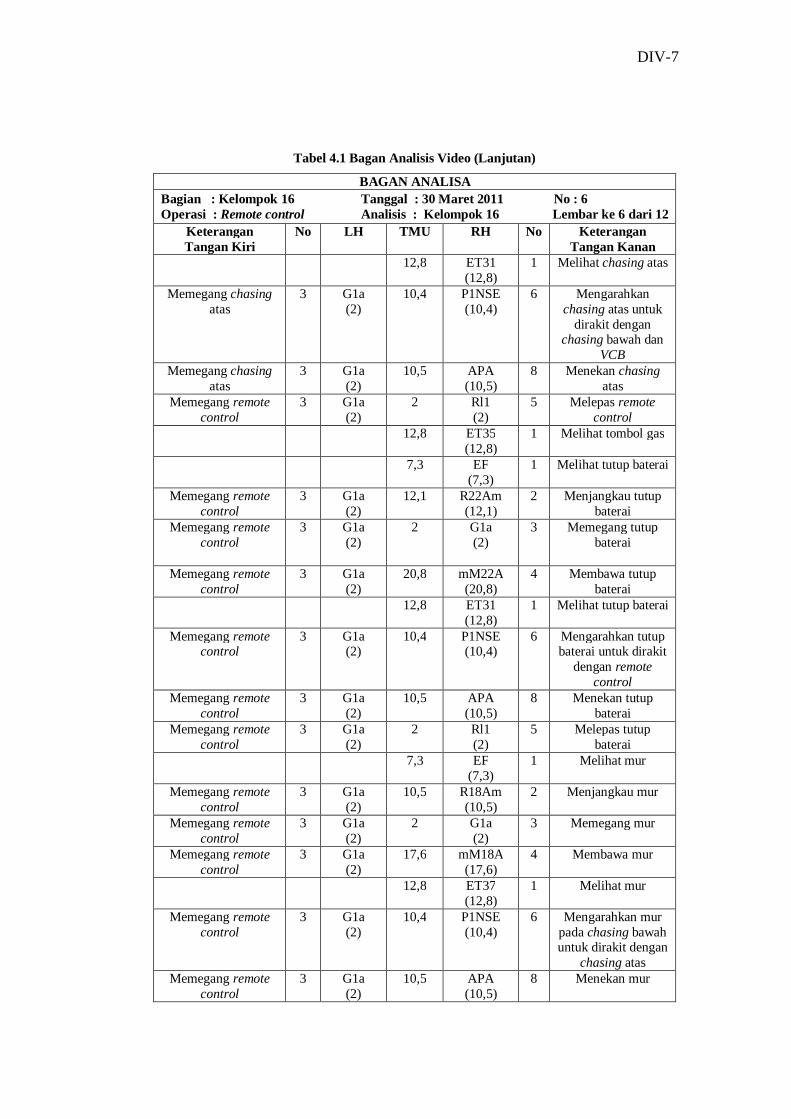
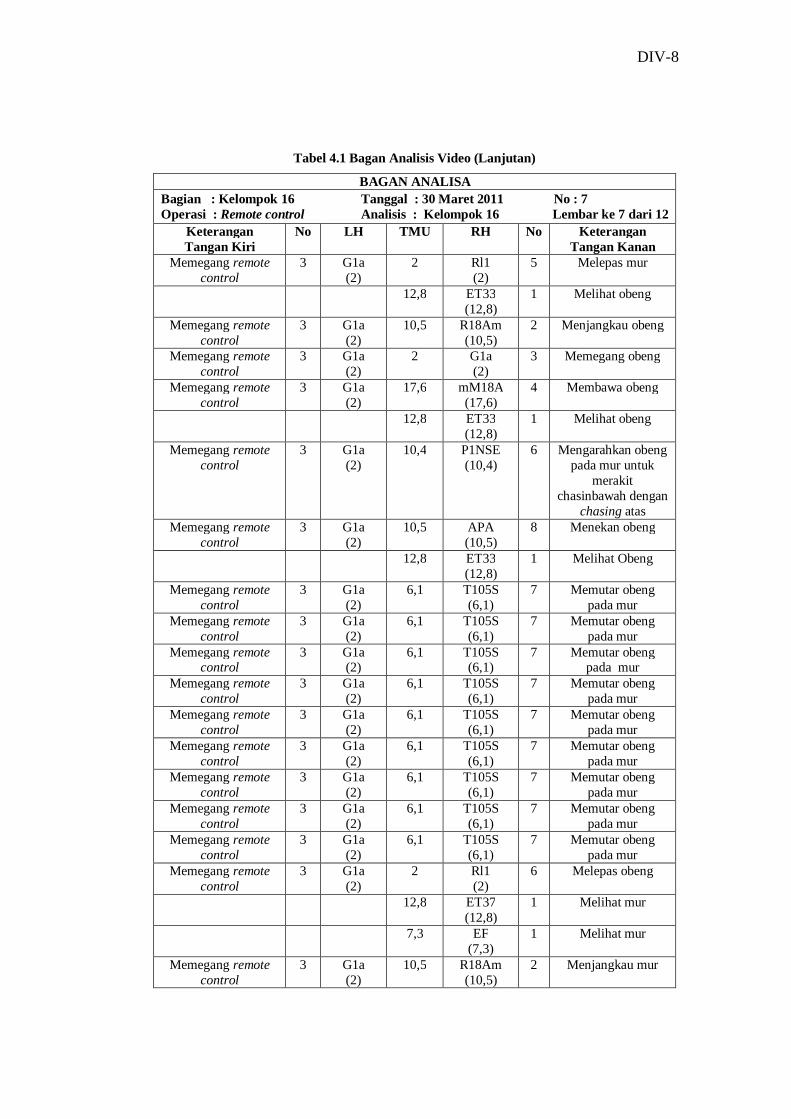
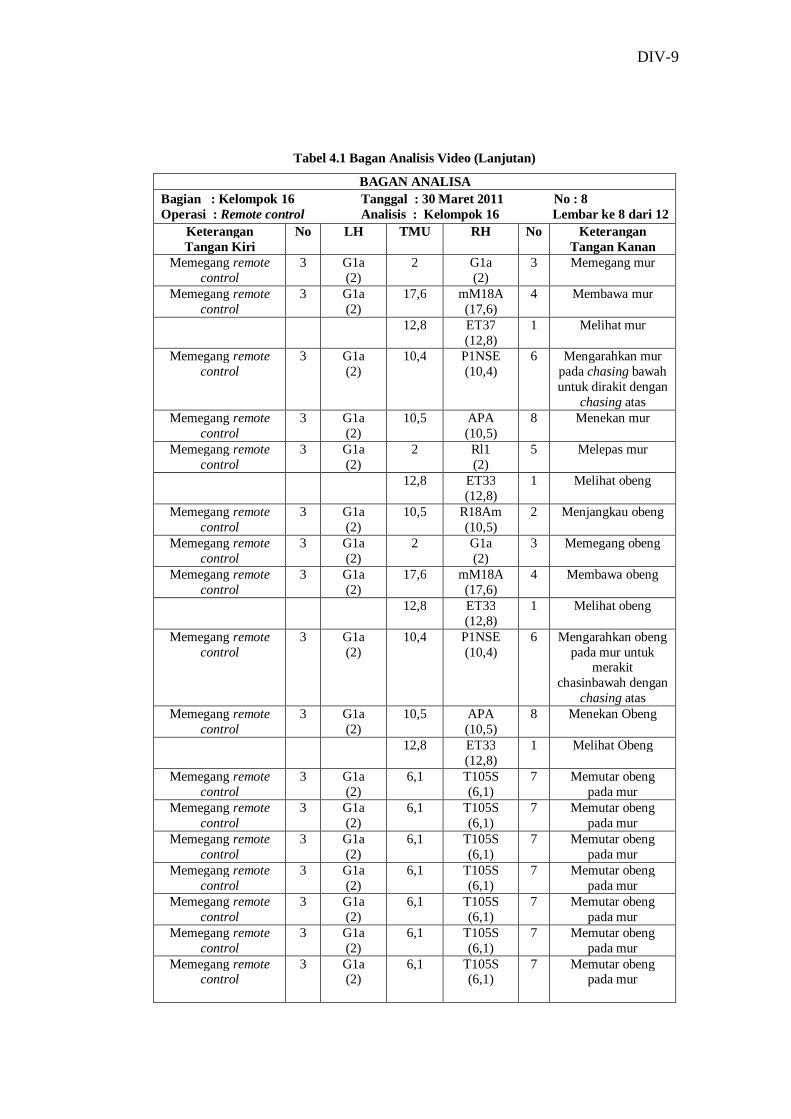
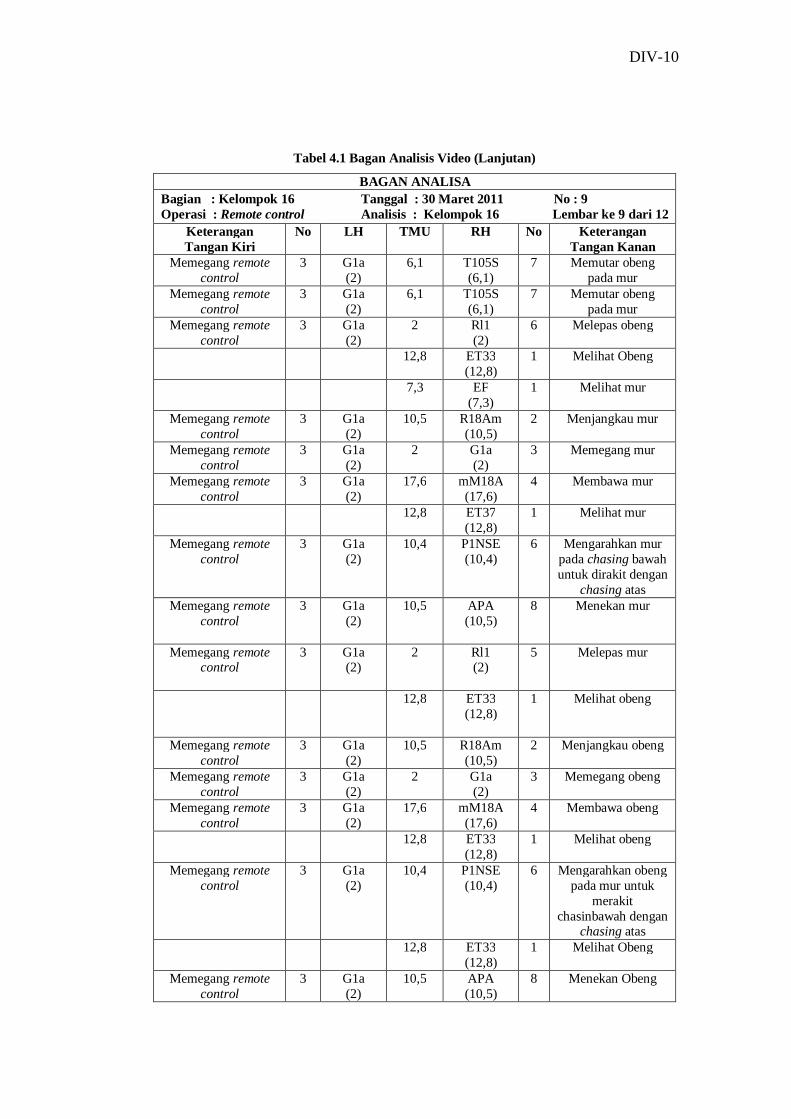
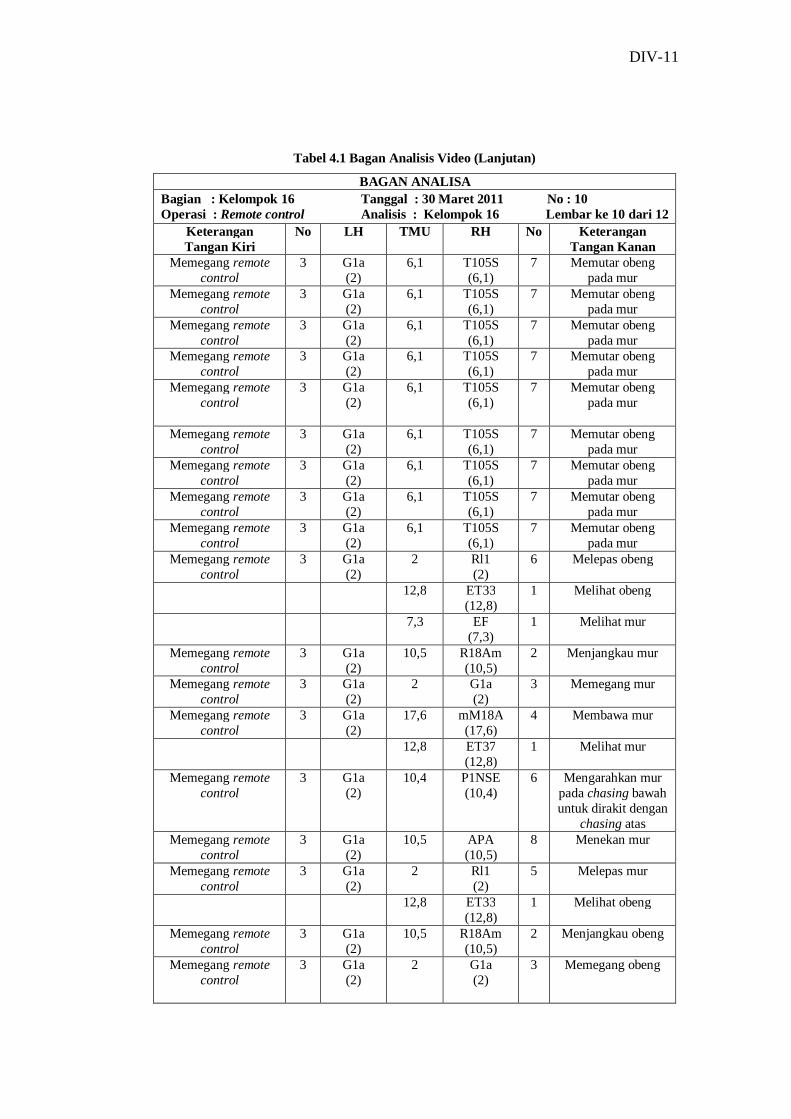
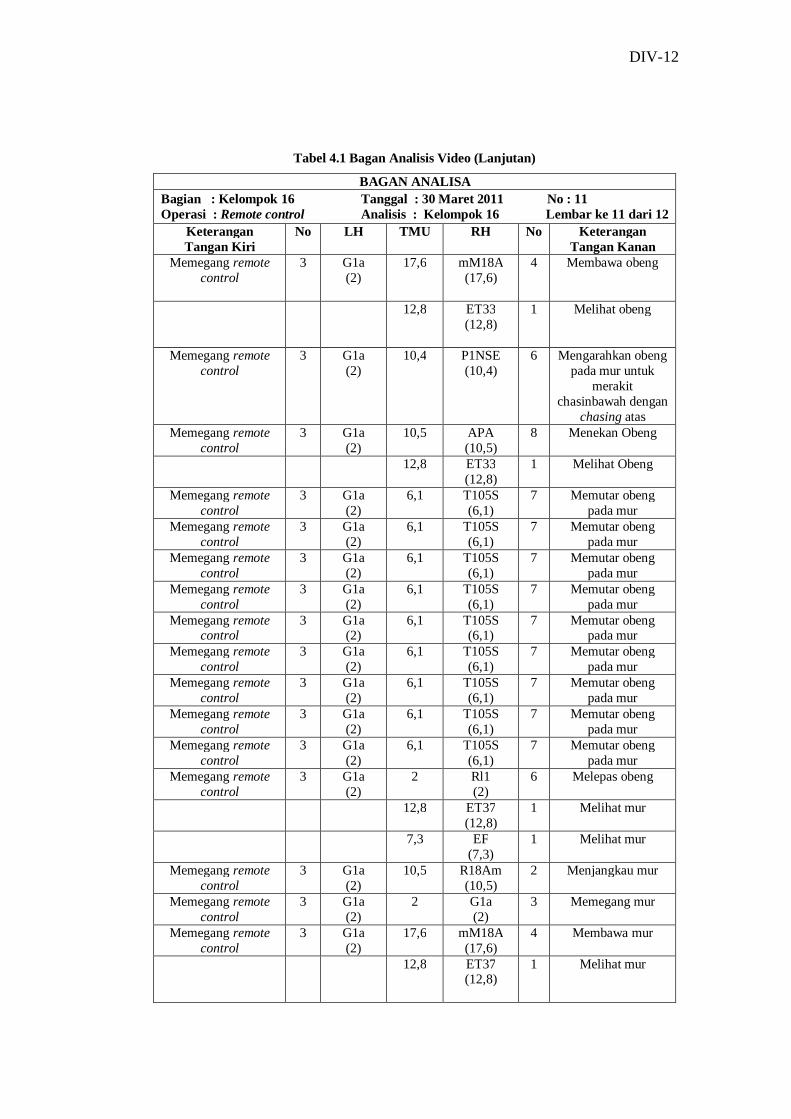
4.1.1 Bagan Analisa Video
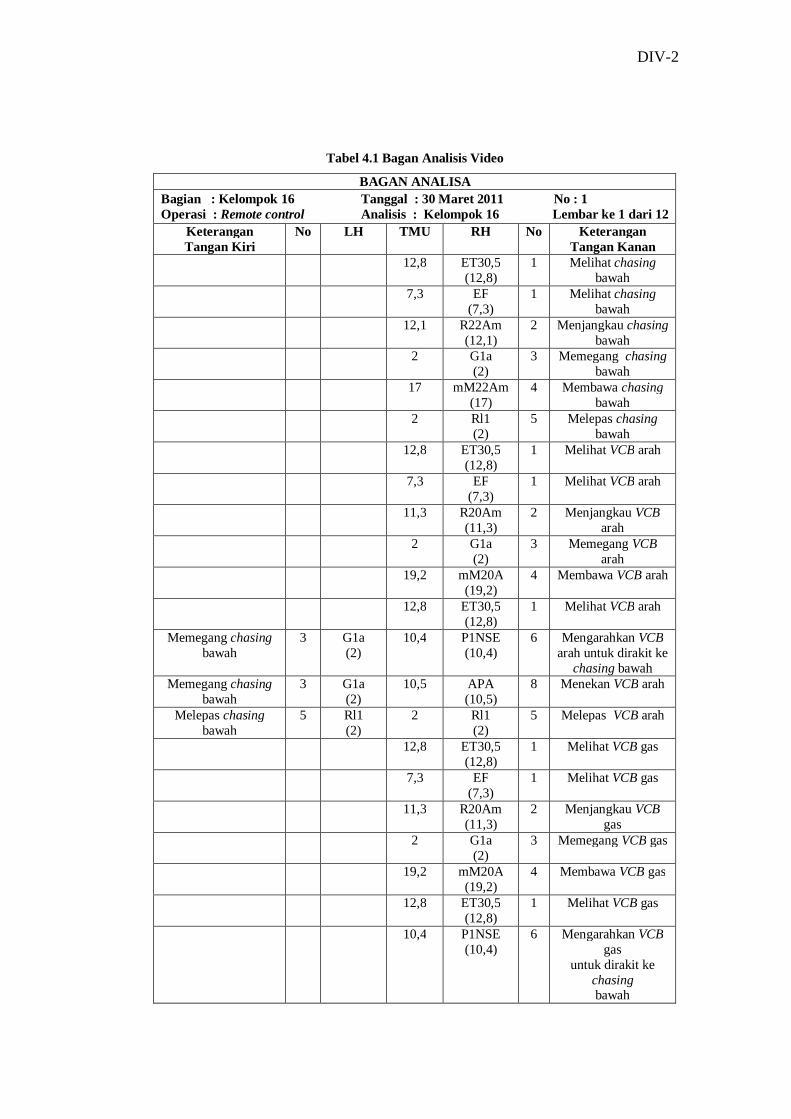
Bagan analisa video ini merupakan suatu bagan yang menjelaskan secara
lebih terperinci mengenai semua gerakan tangan kanan dan tangan kiri yang
dilakukan operator dalam menyelesaikan perakitan remote control. Bagan
analisis ini dibuat untuk mengetahui gerakan-gerakan yang tidak perlu dilakukan
operator dalam merakit remote control agar dapat dilakukan perbaikan pada
gerakan tersebut. Waktu yang dibutuhkan dalam menyelesaikan perakitan remote
control ini dapat dilakukan secara efisien. Penguraian gerakan kerja yang
dilakukan pada perakitan produk remote control dapat dilihat pada Tabel 4.1.
DIV-2
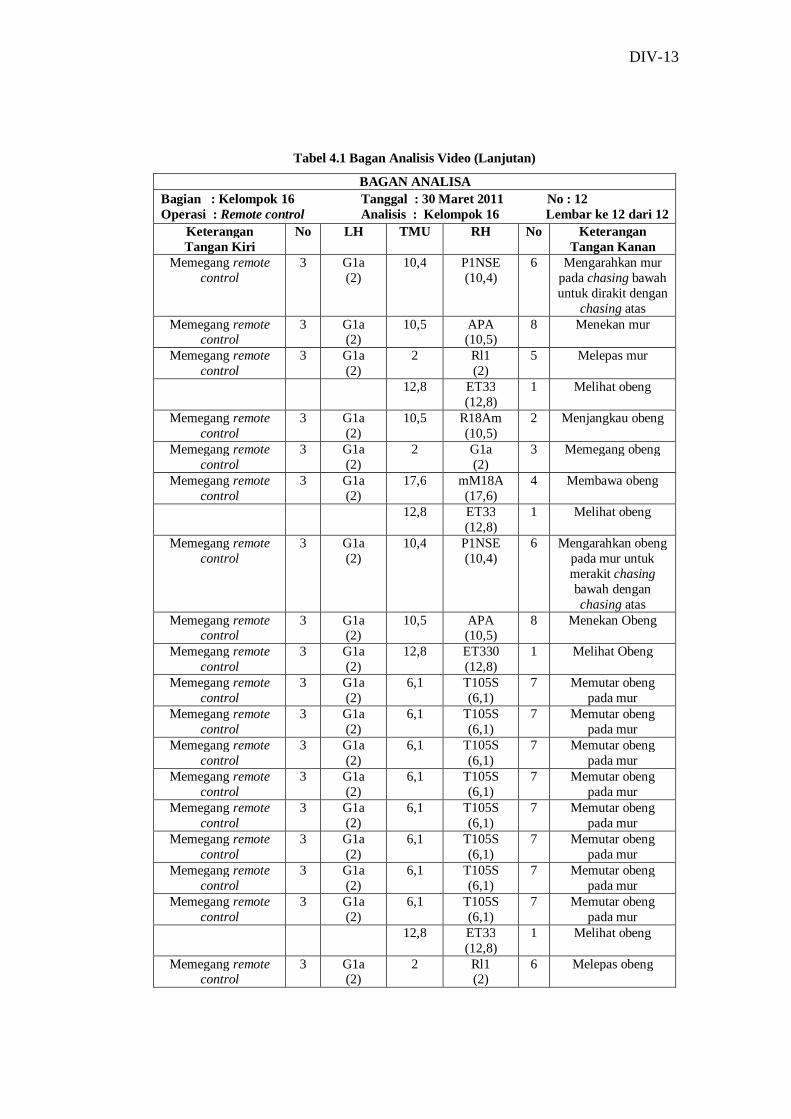
Tabel 4.1 Bagan Analisis Video
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 1 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 1 dari 12
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
12,8 ET30,5 (12,8)
1 Melihat chasing bawah
7,3 EF (7,3)
1 Melihat chasing bawah
12,1 R22Am (12,1)
2 Menjangkau chasing bawah
2 G1a (2)
3 Memegang chasing bawah
17 mM22Am (17)
4 Membawa chasing bawah
2 Rl1 (2)
5 Melepas chasing bawah
12,8 ET30,5 (12,8)
1 Melihat VCB arah
7,3 EF (7,3)
1 Melihat VCB arah
11,3 R20Am (11,3)
2 Menjangkau VCB arah
2 G1a (2)
3 Memegang VCB arah
19,2 mM20A (19,2)
4 Membawa VCB arah
12,8 ET30,5 (12,8)
1 Melihat VCB arah
Memegang chasing bawah
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan VCB arah untuk dirakit ke
chasing bawah Memegang chasing
bawah 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan VCB arah
Melepas chasing bawah
5 Rl1 (2)
2 Rl1 (2)
5 Melepas VCB arah
12,8 ET30,5 (12,8)
1 Melihat VCB gas
7,3 EF (7,3)
1 Melihat VCB gas
11,3 R20Am (11,3)
2 Menjangkau VCB gas
2 G1a (2)
3 Memegang VCB gas
19,2 mM20A (19,2)
4 Membawa VCB gas
12,8 ET30,5 (12,8)
1 Melihat VCB gas
10,4
P1NSE (10,4)
6 Mengarahkan VCB gas
untuk dirakit ke chasing bawah
DIV-3
Tabel 4.1 Bagan Analisis Video (Lanjutan)
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 2 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 2 dari 12
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
10,5 APA (10,5)
8 Menekan VCB gas
12,8 ET30,5 (12,8)
1 Melihat VCB arah
7,3 EF (7,3)
1 Melihat VCB
11,3 R20Am (11,3)
2 Menjangkau VCB
2 G1a (2)
3 Memegang VCB
19,2 mM20A (19,2)
4 Membawa VCB
12,8 ET30,5 (12,8)
1 Melihat VCB
Memegang VCB 3 G1a (2)
2 Rl1 (2)
5 Melepas VCB
12,8 ET32 (12,8)
1 Melihat antena
Memegang VCB 3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau antena
Memegang VCB 3 G1a (2)
2 G1a (2)
3 Memegang antena
Memegang VCB 3 G1a (2)
17,6 mM18A (17,6)
4 Membawa antena
12,8 ET32 (12,8)
1 Melihat antena
Memegang VCB 3 G1a (2)
10,4
P1NSE (10,4)
6 Mengarahkan antena untuk dirakit ke
VCB Memegang VCB 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan antena
Memegang VCB 3 G1a (2)
6,1 T105S (6,1)
7 Memutar antena
Memegang VCB 3 G1a (2)
6,1 T105S (6,1)
7 Memutar antena
Memegang VCB 3 G1a (2)
6,1 T105S (6,1)
7 Memutar antena
Memegang VCB 3 G1a (2)
6,1 T105S (6,1)
7 Memutar antena
Memegang VCB 3 G1a (2)
6,1 T105S (6,1)
7 Memutar antena
Memegang VCB 3 G1a (2)
6,1 T105S (6,1)
7 Memutar antena
Memegang VCB 3 G1a (2)
6,1 T105S (6,1)
7 Memutar antena
12,8 ET30,5 (12,8)
1 Melihat VCB
DIV-4
Tabel 4.1 Bagan Analisis Video (Lanjutan)
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 3 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 3 dari 12
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
Melepas VCB 5 Rl1 (2)
2 G1a (2)
3 Memegang VCB
Memegang chasing bawah
3 G1a (2)
10,4
P1NSE (10,4)
6 Mengarahkan VCB untuk dirakit ke chasing bawah
Memegang chasing bawah
3 G1a (2)
10,5 APA (10,5)
8 Menekan VCB
Melepas chasing bawah
5 Rl1 (2)
2 Rl1 (2)
5 Melepas VCB
12,8 ET37 (12,8)
1 Melihat mur
7,3 EF (7,3)
1 Melihat mur
10,5 R18Am (10,5)
2 Menjangkau mur
2 G1a (2)
3 Memegang mur
17,6 mM18A (17,6)
4 Membawa mur
12,8 ET37 (12,8)
1 Melihat mur
Memegang VCB dan chasing bawah
3 G1a (2)
10,4
P1NSE (10,4)
6 Mengarahkan mur pada VCB untuk dirakit dengan chasing bawah
Memegang VCB dan chasing bawah
3 G1a (2)
10,5 APA (10,5)
8 Menekan mur
Memegang VCB dan chasing bawah
3 G1a (2)
2 Rl1 (2)
5 Melepas mur
12,8 ET33 (12,8)
1 Melihat obeng
Memegang VCB dan chasing bawah
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau obeng
Memegang VCB dan chasing bawah
3 G1a (2)
2 G1a (2)
3 Memegang obeng
Memegang VCB dan chasing bawah
3 G1a (2)
12,2 mM18A (12,2)
4 Membawa obeng
12,8 ET33 (12,8)
1 Melihat obeng
Memegang VCB dan chasing bawah
3 G1a (2)
10,4
P1NSE (10,4)
6 Mengarahkan obeng pada mur untuk
merakit VCB dengan chasing bawah
12,8
ET33 (12,8)
1 Melihat Obeng
Memegang VCB dan chasing bawah
3 G1a (2)
10,5 APA (10,5)
8 Menekan obeng
DIV-5
Tabel 4.1 Bagan Analisis Video (Lanjutan)
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 4 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 4 dari 12
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
Memegang VCB dan chasing bawah
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang VCB dan chasing bawah
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang VCB dan chasing bawah
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang VCB dan chasing bawah
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang VCB dan chasing bawah
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang VCB dan chasing bawah
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang VCB dan chasing bawah
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang VCB dan chasing bawah
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang VCB dan
chasing bawah 3 G1a
(2) 6,1 T105S
(6,1) 7 Memutar obeng
pada mur Memegang VCB dan
chasing bawah 3 G1a
(2) 2 Rl1
(2) 5 Melepas obeng
12,8 ET35 (12,8)
1 Melihat tombol arah
7,3 EF (7,3)
1 Melihat tombol arah
Memegang VCB dan chasing bawah
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau tombol arah
Memegang VCB dan chasing bawah
3 G1a (2)
2 G1a (2)
3 Memegang tombol arah
Memegang VCB dan chasing bawah
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa tombol arah
12,8 ET35 (12,8)
1 Melihat tombol arah
Memegang VCB dan chasing bawah
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan tombol arah untuk
dirakit dengan VCB Memegang VCB dan
chasing bawah 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan tombol
arah
12,8 ET35
(12,8) 1 Melihat tombol arah
2 Rl1 (2)
5 Melepas tombol arah
Memegang VCB dan chasing bawah
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan tombol arah untuk
dirakit dengan VCB 12,8 ET35
(12,8) 1 Melihat tombol arah
DIV-6
Tabel 4.1 Bagan Analisis Video (Lanjutan)
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 5 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 5 dari 12
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
Memegang VCB dan chasing bawah
3 G1a (2)
2 Rl1 (2)
5 Melepas tombol arah
Memegang VCB dan chasing bawah
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan tombol arah untuk
dirakit dengan VCB Memegang VCB dan
chasing bawah 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan tombol
arah Memegang VCB dan
chasing bawah 3 G1a
(2) 2 Rl1
(2) 5 Melepas tombol
arah 12,8 ET35
(12,8) 1 Melihat tombol arah
7,3 EF (7,3)
1 Melihat tombol gas
Memegang VCB dan chasing bawah
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau tombol gas
Memegang VCB dan chasing bawah
3 G1a (2)
2 G1a (2)
3 Memegang tombol gas
Memegang VCB dan chasing bawah
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa tombol gas
12,8 ET35 (12,8)
1 Melihat tombol gas
Memegang VCB dan chasing bawah
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan tombol gas untuk
dirakit dengan VCB Memegang VCB dan
chasing bawah 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan tombol gas
Memegang VCB dan chasing bawah
3 G1a (2)
2 Rl1 (2)
5 Melepas tombol gas
12,8 ET31 (12,8)
1 Melihat chasing gas
7,3 EF (7,3)
1 Melihat chasing atas
Memegang VCB dan chasing bawah
3 G1a (2)
12,1 R22Am (12,1)
2 Menjangkau chasing atas
Memegang VCB dan chasing bawah
3 G1a (2)
2 G1a (2)
3 Memegang chasing atas
Memegang VCB dan chasing bawah
3 G1a (2)
17 mM22Am (17)
4 Membawa chasing atas
Memegang VCB dan chasing bawah
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan chasing atas untuk
dirakit dengan chasing bawah dan
VCB
DIV-7
Tabel 4.1 Bagan Analisis Video (Lanjutan)
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 6 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 6 dari 12
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
12,8 ET31 (12,8)
1 Melihat chasing atas
Memegang chasing atas
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan chasing atas untuk
dirakit dengan chasing bawah dan
VCB Memegang chasing
atas 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan chasing
atas Memegang remote
control 3 G1a
(2) 2 Rl1
(2) 5 Melepas remote
control 12,8 ET35
(12,8) 1 Melihat tombol gas
7,3 EF (7,3)
1 Melihat tutup baterai
Memegang remote control
3 G1a (2)
12,1 R22Am (12,1)
2 Menjangkau tutup baterai
Memegang remote control
3 G1a (2)
2 G1a (2)
3 Memegang tutup baterai
Memegang remote control
3 G1a (2)
20,8 mM22A (20,8)
4 Membawa tutup baterai
12,8 ET31 (12,8)
1 Melihat tutup baterai
Memegang remote control
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan tutup baterai untuk dirakit
dengan remote control
Memegang remote control
3 G1a (2)
10,5 APA (10,5)
8 Menekan tutup baterai
Memegang remote control
3 G1a (2)
2 Rl1 (2)
5 Melepas tutup baterai
7,3 EF (7,3)
1 Melihat mur
Memegang remote control
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau mur
Memegang remote control
3 G1a (2)
2 G1a (2)
3 Memegang mur
Memegang remote control
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa mur
12,8 ET37 (12,8)
1 Melihat mur
Memegang remote control
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan mur pada chasing bawah untuk dirakit dengan
chasing atas Memegang remote
control 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan mur
DIV-8
Tabel 4.1 Bagan Analisis Video (Lanjutan)
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 7 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 7 dari 12
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
Memegang remote control
3 G1a (2)
2 Rl1 (2)
5 Melepas mur
12,8 ET33 (12,8)
1 Melihat obeng
Memegang remote control
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau obeng
Memegang remote control
3 G1a (2)
2 G1a (2)
3 Memegang obeng
Memegang remote control
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa obeng
12,8 ET33 (12,8)
1 Melihat obeng
Memegang remote control
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan obeng pada mur untuk
merakit chasinbawah dengan
chasing atas Memegang remote
control 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan obeng
12,8 ET33
(12,8) 1 Melihat Obeng
Memegang remote
control 3 G1a
(2) 6,1 T105S
(6,1) 7 Memutar obeng
pada mur Memegang remote
control 3 G1a
(2) 6,1 T105S
(6,1) 7 Memutar obeng
pada mur Memegang remote
control 3 G1a
(2) 6,1 T105S
(6,1) 7 Memutar obeng
pada mur Memegang remote
control 3 G1a
(2) 6,1 T105S
(6,1) 7 Memutar obeng
pada mur Memegang remote
control 3 G1a
(2) 6,1 T105S
(6,1) 7 Memutar obeng
pada mur Memegang remote
control 3 G1a
(2) 6,1 T105S
(6,1) 7 Memutar obeng
pada mur Memegang remote
control 3 G1a
(2) 6,1 T105S
(6,1) 7 Memutar obeng
pada mur Memegang remote
control 3 G1a
(2) 6,1 T105S
(6,1) 7 Memutar obeng
pada mur Memegang remote
control 3 G1a
(2) 6,1 T105S
(6,1) 7 Memutar obeng
pada mur Memegang remote
control 3 G1a
(2) 2 Rl1
(2) 6 Melepas obeng
12,8 ET37 (12,8)
1 Melihat mur
7,3 EF (7,3)
1 Melihat mur
Memegang remote control
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau mur
DIV-9
Tabel 4.1 Bagan Analisis Video (Lanjutan)
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 8 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 8 dari 12
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
Memegang remote control
3 G1a (2)
2 G1a (2)
3 Memegang mur
Memegang remote control
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa mur
12,8 ET37 (12,8)
1 Melihat mur
Memegang remote control
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan mur pada chasing bawah untuk dirakit dengan
chasing atas Memegang remote
control 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan mur
Memegang remote
control 3 G1a
(2) 2 Rl1
(2) 5 Melepas mur
12,8 ET33
(12,8) 1 Melihat obeng
Memegang remote
control 3 G1a
(2) 10,5 R18Am
(10,5) 2 Menjangkau obeng
Memegang remote
control 3 G1a
(2) 2 G1a
(2) 3 Memegang obeng
Memegang remote
control 3 G1a
(2) 17,6 mM18A
(17,6) 4 Membawa obeng
12,8 ET33
(12,8) 1 Melihat obeng
Memegang remote
control 3 G1a
(2) 10,4 P1NSE
(10,4) 6 Mengarahkan obeng
pada mur untuk merakit
chasinbawah dengan chasing atas
Memegang remote control
3 G1a (2)
10,5 APA (10,5)
8 Menekan Obeng
12,8 ET33 (12,8)
1 Melihat Obeng
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
DIV-10
Tabel 4.1 Bagan Analisis Video (Lanjutan)
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 9 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 9 dari 12
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
2 Rl1 (2)
6 Melepas obeng
12,8 ET33 (12,8)
1 Melihat Obeng
7,3 EF (7,3)
1 Melihat mur
Memegang remote control
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau mur
Memegang remote control
3 G1a (2)
2 G1a (2)
3 Memegang mur
Memegang remote control
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa mur
12,8 ET37 (12,8)
1 Melihat mur
Memegang remote control
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan mur pada chasing bawah untuk dirakit dengan
chasing atas Memegang remote
control 3 G1a
(2) 10,5 APA
(10,5)
8 Menekan mur
Memegang remote control
3 G1a (2)
2 Rl1 (2)
5 Melepas mur
12,8 ET33 (12,8)
1 Melihat obeng
Memegang remote control
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau obeng
Memegang remote control
3 G1a (2)
2 G1a (2)
3 Memegang obeng
Memegang remote control
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa obeng
12,8 ET33 (12,8)
1 Melihat obeng
Memegang remote control
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan obeng pada mur untuk
merakit chasinbawah dengan
chasing atas 12,8 ET33
(12,8) 1 Melihat Obeng
Memegang remote
control 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan Obeng
DIV-11
Tabel 4.1 Bagan Analisis Video (Lanjutan)
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 10 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 10 dari 12
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote
control 3 G1a
(2) 6,1 T105S
(6,1) 7 Memutar obeng
pada mur Memegang remote
control 3 G1a
(2) 6,1 T105S
(6,1) 7 Memutar obeng
pada mur Memegang remote
control 3 G1a
(2) 6,1 T105S
(6,1) 7 Memutar obeng
pada mur Memegang remote
control 3 G1a
(2) 6,1 T105S
(6,1) 7 Memutar obeng
pada mur Memegang remote
control 3 G1a
(2) 2 Rl1
(2) 6 Melepas obeng
12,8 ET33 (12,8)
1 Melihat obeng
7,3 EF (7,3)
1 Melihat mur
Memegang remote control
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau mur
Memegang remote control
3 G1a (2)
2 G1a (2)
3 Memegang mur
Memegang remote control
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa mur
12,8 ET37 (12,8)
1 Melihat mur
Memegang remote control
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan mur pada chasing bawah untuk dirakit dengan
chasing atas Memegang remote
control 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan mur
Memegang remote
control 3 G1a
(2) 2 Rl1
(2) 5 Melepas mur
12,8 ET33
(12,8) 1 Melihat obeng
Memegang remote control
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau obeng
Memegang remote control
3 G1a (2)
2 G1a (2)
3 Memegang obeng
DIV-12
Tabel 4.1 Bagan Analisis Video (Lanjutan)
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 11 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 11 dari 12
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
Memegang remote control
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa obeng
12,8 ET33 (12,8)
1 Melihat obeng
Memegang remote control
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan obeng pada mur untuk
merakit chasinbawah dengan
chasing atas Memegang remote
control 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan Obeng
12,8 ET33 (12,8)
1 Melihat Obeng
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
2 Rl1 (2)
6 Melepas obeng
12,8 ET37 (12,8)
1 Melihat mur
7,3 EF (7,3)
1 Melihat mur
Memegang remote control
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau mur
Memegang remote control
3 G1a (2)
2 G1a (2)
3 Memegang mur
Memegang remote control
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa mur
12,8 ET37 (12,8)
1 Melihat mur
DIV-13
Tabel 4.1 Bagan Analisis Video (Lanjutan)
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 12 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 12 dari 12
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
Memegang remote control
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan mur pada chasing bawah untuk dirakit dengan
chasing atas Memegang remote
control 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan mur
Memegang remote
control 3 G1a
(2) 2 Rl1
(2) 5 Melepas mur
12,8 ET33
(12,8) 1 Melihat obeng
Memegang remote control
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau obeng
Memegang remote control
3 G1a (2)
2 G1a (2)
3 Memegang obeng
Memegang remote control
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa obeng
12,8
ET33 (12,8)
1 Melihat obeng
Memegang remote control
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan obeng pada mur untuk merakit chasing bawah dengan chasing atas
Memegang remote control
3 G1a (2)
10,5 APA (10,5)
8 Menekan Obeng
Memegang remote control
3 G1a (2)
12,8 ET330 (12,8)
1 Melihat Obeng
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,1 T105S (6,1)
7 Memutar obeng pada mur
12,8 ET33 (12,8)
1 Melihat obeng
Memegang remote control
3 G1a (2)
2 Rl1 (2)
6 Melepas obeng
DIV-14
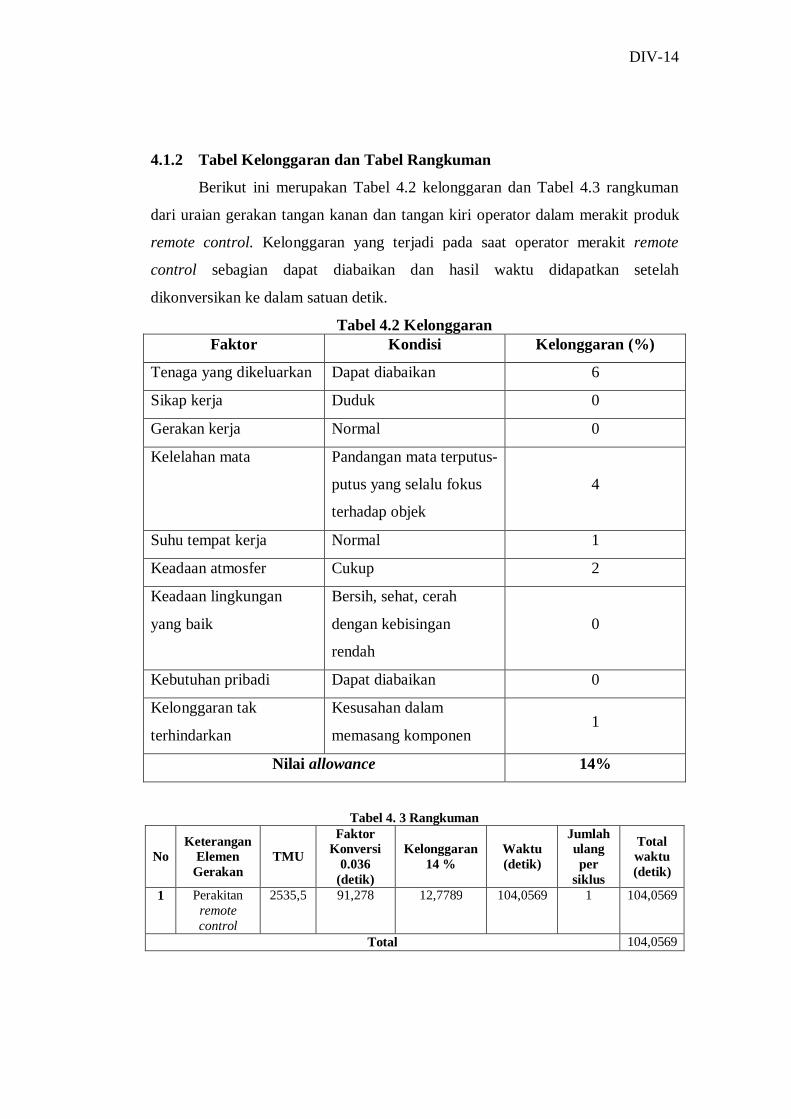
4.1.2 Tabel Kelonggaran dan Tabel Rangkuman
Berikut ini merupakan Tabel 4.2 kelonggaran dan Tabel 4.3 rangkuman
dari uraian gerakan tangan kanan dan tangan kiri operator dalam merakit produk
remote control. Kelonggaran yang terjadi pada saat operator merakit remote
control sebagian dapat diabaikan dan hasil waktu didapatkan setelah
dikonversikan ke dalam satuan detik.
Tabel 4.2 Kelonggaran Faktor Kondisi Kelonggaran (%)
Tenaga yang dikeluarkan Dapat diabaikan 6
Sikap kerja Duduk 0
Gerakan kerja Normal 0
Kelelahan mata Pandangan mata terputus-
putus yang selalu fokus
terhadap objek
4
Suhu tempat kerja Normal 1
Keadaan atmosfer Cukup 2
Keadaan lingkungan
yang baik
Bersih, sehat, cerah
dengan kebisingan
rendah
0
Kebutuhan pribadi Dapat diabaikan 0
Kelonggaran tak
terhindarkan
Kesusahan dalam
memasang komponen 1
Nilai allowance 14%
Tabel 4. 3 Rangkuman
No Keterangan
Elemen Gerakan
TMU
Faktor Konversi
0.036 (detik)
Kelonggaran 14 %
Waktu (detik)
Jumlah ulang per
siklus
Total waktu (detik)
1 Perakitan remote control
2535,5 91,278 12,7789 104,0569 1 104,0569
Total 104,0569
DIV-15
4.2 Analisis
Total waktu yang diperlukan pada perakitan remote control ini diperoleh
dengan nilai 104,0496 detik. Waktu pada bagan analisa video lebih kecil daripada
waktu pada rekaman video perbedaan waktu tersebut sebesar 34 detik. Hal ini
terjadi karena pada gerakan kerja dalam perakitan remote control, operator banyak
mengalami kesalahan dalam merakit remote control tersebut. Kesalahan operator
tersebut adalah mengambil obeng ketika memulai perakitan dan melakukan
gerakan yang tidak perlu. Sehingga waktu yang didapatkan tidak pernah sama
antara waktu dari bagan analisa video dengan waktu rekaman video. hal ini
disebabkan karena tabel MTM-1 dibuat oleh orang Eropa dengan standar dari
orang Eropa tersebut sehingga tabel MTM-1 tidak dapat diterapkan di Asia.
Gerakan kedua tangan operator pada dasarnya adalah sama. Tangan kanan
dan tangan kiri sama-sama menguraikan masing-masing kegiatan, biasanya yang
lebih banyak melakukan pergerakan yaitu pada tangan kanan dan tangan kiri
hanya banyak melakukan gerakan “memegang atau grasp”. Penguraian Gerakan-
gerakan dasar yang dilakukan pada saat perakitan dilakukan berdasarkan elemen-
elemen gerakan yang terdapat pada Methods Time Measurement (MTM-1).
4.3. Perbaikan Kerja
Perbaikan yang akan dilakukan dari bagan analisis video diatas akan
dijelaskan secara terperinci pada subbab ini. Perbaikan cara kerja operator akan
dilakukan dengan mengurangi aktivitas-aktivitas dari operator yang dianggap
tidak perlu dan melakukan perbaikan layout dalam perakitan remote control.
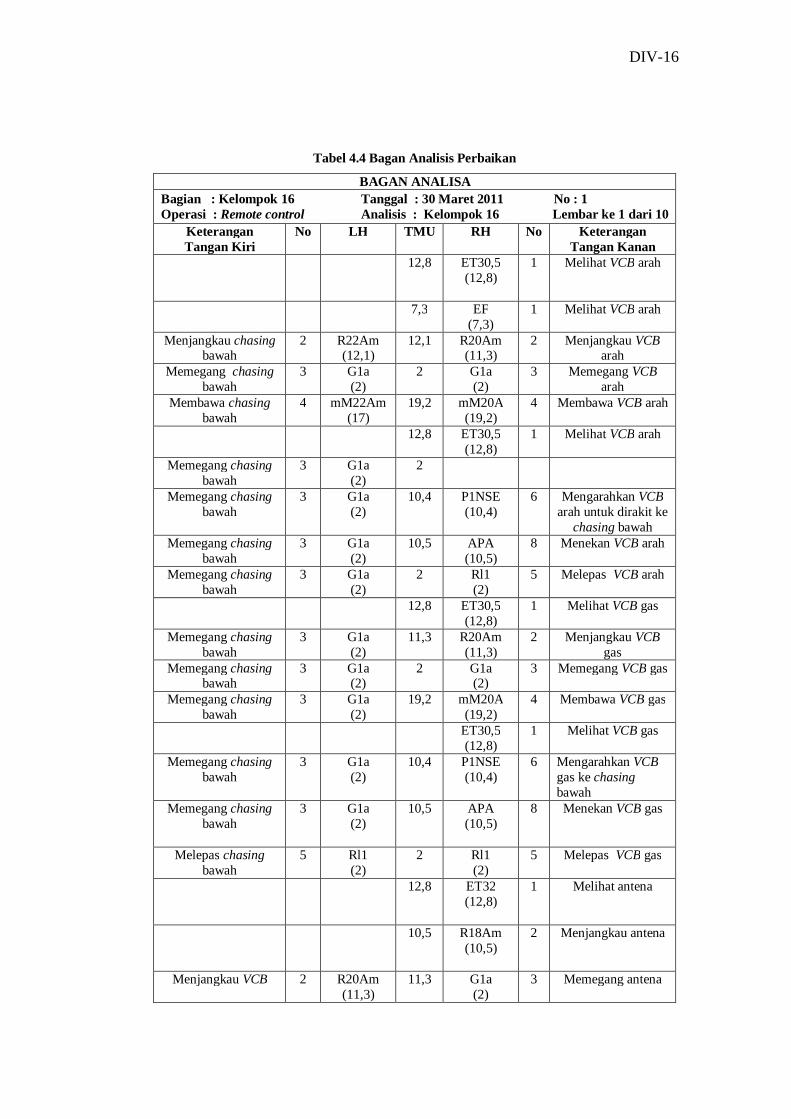
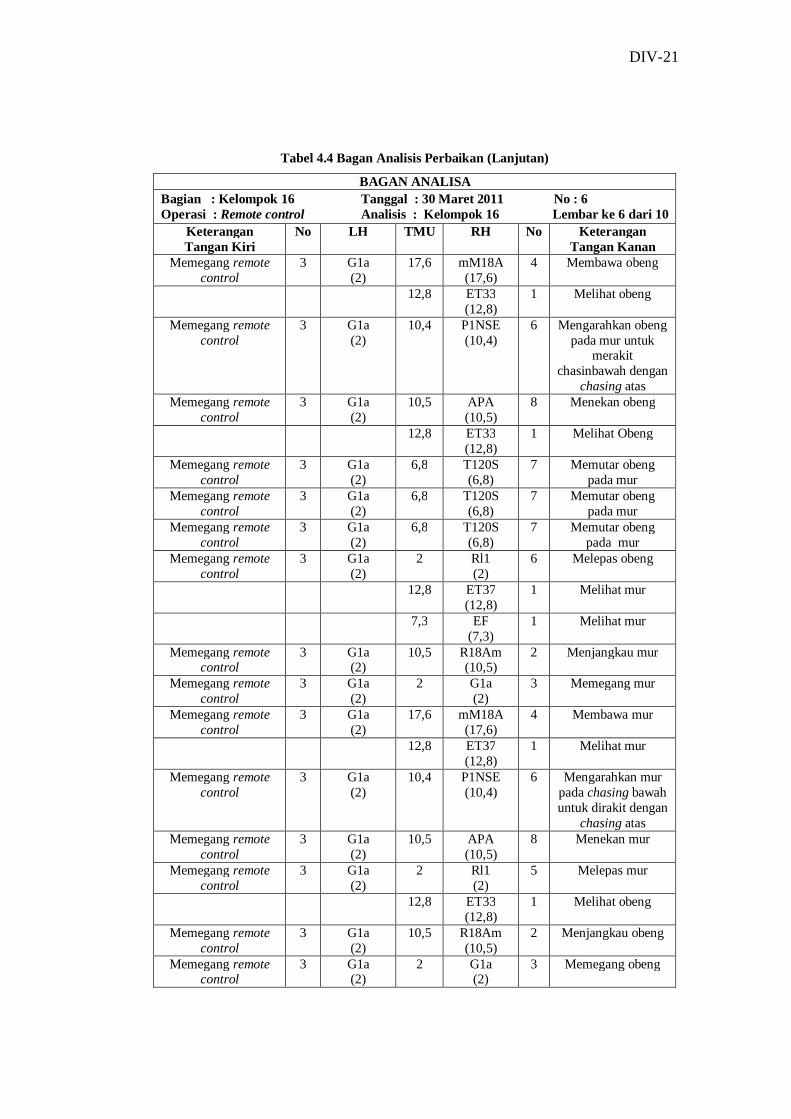
4.3.1 Bagan Analisa Perbaikan
Bagan analisa perbaikan ini berisi tentang uraian-uraian aktivitas operator
yang terperinci. Seluruh aktivitas operator yang tidak diperlukan telah dihilangkan
dan dengan menggunakan layout yang telah diperbaiki. Penguraian gerakan kerja
perbaikan yang dapat dilihat pada tabel 4.1
DIV-16
Tabel 4.4 Bagan Analisis Perbaikan
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 1 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 1 dari 10
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
12,8 ET30,5 (12,8)
1 Melihat VCB arah
7,3 EF (7,3)
1 Melihat VCB arah
Menjangkau chasing bawah
2 R22Am (12,1)
12,1 R20Am (11,3)
2 Menjangkau VCB arah
Memegang chasing bawah
3 G1a (2)
2 G1a (2)
3 Memegang VCB arah
Membawa chasing bawah
4 mM22Am (17)
19,2 mM20A (19,2)
4 Membawa VCB arah
12,8 ET30,5 (12,8)
1 Melihat VCB arah
Memegang chasing bawah
3 G1a (2)
2
Memegang chasing bawah
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan VCB arah untuk dirakit ke
chasing bawah Memegang chasing
bawah 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan VCB arah
Memegang chasing bawah
3 G1a (2)
2 Rl1 (2)
5 Melepas VCB arah
12,8 ET30,5 (12,8)
1 Melihat VCB gas
Memegang chasing bawah
3 G1a (2)
11,3 R20Am (11,3)
2 Menjangkau VCB gas
Memegang chasing bawah
3 G1a (2)
2 G1a (2)
3 Memegang VCB gas
Memegang chasing bawah
3 G1a (2)
19,2 mM20A (19,2)
4 Membawa VCB gas
ET30,5 (12,8)
1 Melihat VCB gas
Memegang chasing bawah
3 G1a (2)
10,4
P1NSE (10,4)
6 Mengarahkan VCB gas ke chasing bawah
Memegang chasing bawah
3 G1a (2)
10,5 APA (10,5)
8 Menekan VCB gas
Melepas chasing bawah
5 Rl1 (2)
2 Rl1 (2)
5 Melepas VCB gas
12,8 ET32 (12,8)
1 Melihat antena
10,5 R18Am (10,5)
2 Menjangkau antena
Menjangkau VCB 2 R20Am (11,3)
11,3 G1a (2)
3 Memegang antena
DIV-17
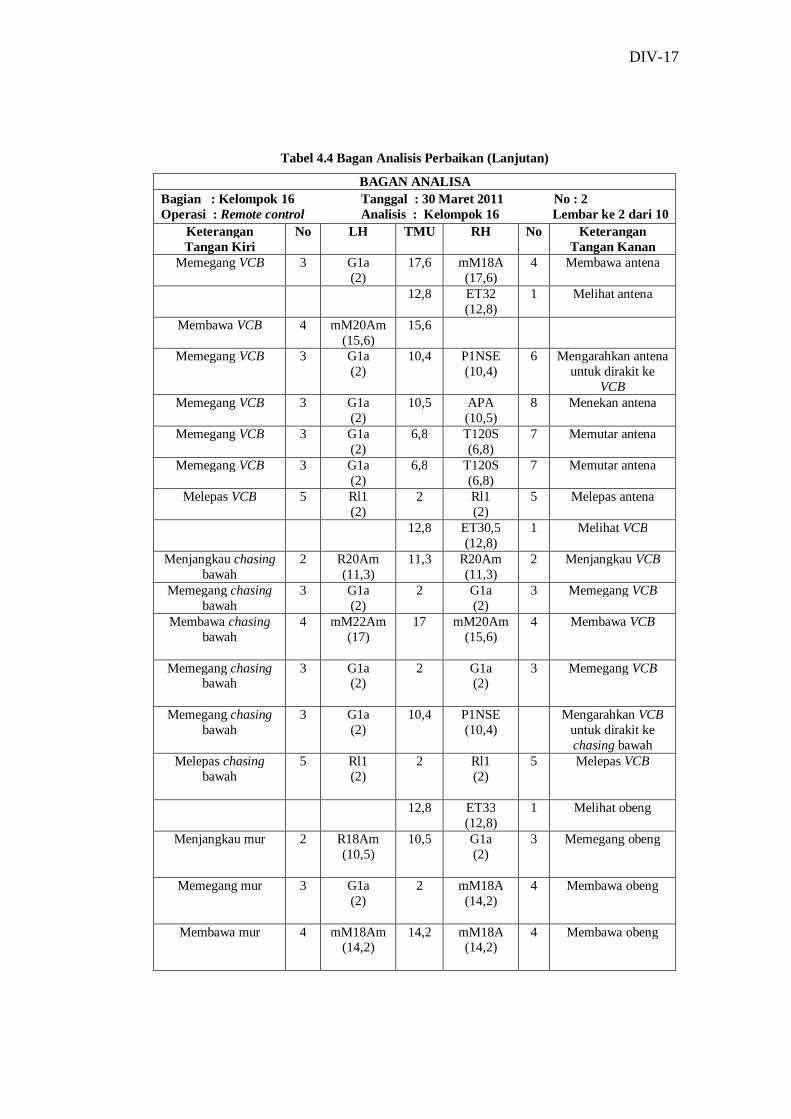
Tabel 4.4 Bagan Analisis Perbaikan (Lanjutan)
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 2 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 2 dari 10
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
Memegang VCB
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa antena
12,8 ET32 (12,8)
1 Melihat antena
Membawa VCB
4 mM20Am (15,6)
15,6
Memegang VCB 3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan antena untuk dirakit ke
VCB Memegang VCB 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan antena
Memegang VCB 3 G1a (2)
6,8 T120S (6,8)
7 Memutar antena
Memegang VCB 3 G1a (2)
6,8 T120S (6,8)
7 Memutar antena
Melepas VCB 5 Rl1 (2)
2 Rl1 (2)
5 Melepas antena
12,8 ET30,5 (12,8)
1 Melihat VCB
Menjangkau chasing bawah
2 R20Am (11,3)
11,3
R20Am (11,3)
2 Menjangkau VCB
Memegang chasing bawah
3 G1a (2)
2 G1a (2)
3 Memegang VCB
Membawa chasing bawah
4 mM22Am (17)
17 mM20Am (15,6)
4 Membawa VCB
Memegang chasing bawah
3 G1a (2)
2 G1a (2)
3 Memegang VCB
Memegang chasing bawah
3 G1a (2)
10,4
P1NSE (10,4)
Mengarahkan VCB untuk dirakit ke chasing bawah
Melepas chasing bawah
5 Rl1 (2)
2 Rl1 (2)
5 Melepas VCB
12,8 ET33 (12,8)
1 Melihat obeng
Menjangkau mur 2 R18Am (10,5)
10,5 G1a (2)
3 Memegang obeng
Memegang mur 3 G1a (2)
2 mM18A (14,2)
4 Membawa obeng
Membawa mur
4 mM18Am (14,2)
14,2 mM18A (14,2)
4 Membawa obeng
DIV-18
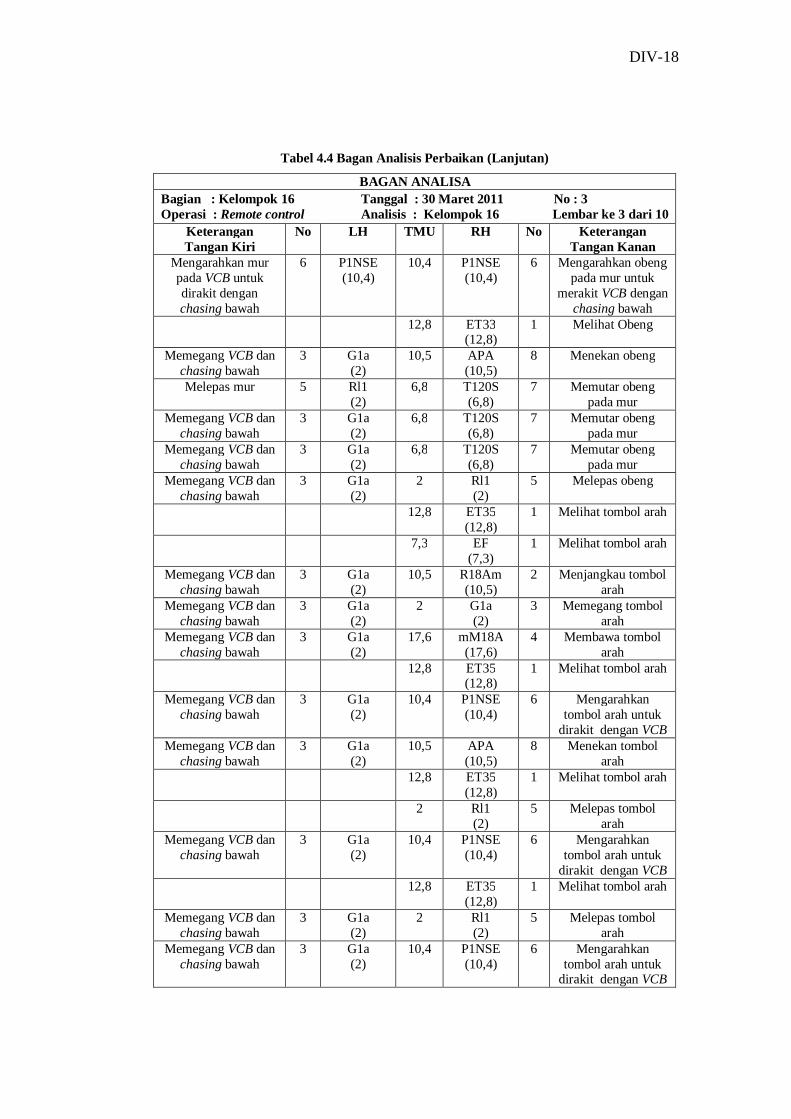
Tabel 4.4 Bagan Analisis Perbaikan (Lanjutan)
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 3 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 3 dari 10
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
Mengarahkan mur pada VCB untuk dirakit dengan chasing bawah
6 P1NSE (10,4)
10,4 P1NSE (10,4)
6 Mengarahkan obeng pada mur untuk
merakit VCB dengan chasing bawah
12,8 ET33 (12,8)
1 Melihat Obeng
Memegang VCB dan chasing bawah
3 G1a (2)
10,5 APA (10,5)
8 Menekan obeng
Melepas mur
5 Rl1 (2)
6,8 T120S (6,8)
7 Memutar obeng pada mur
Memegang VCB dan chasing bawah
3 G1a (2)
6,8 T120S (6,8)
7 Memutar obeng pada mur
Memegang VCB dan chasing bawah
3 G1a (2)
6,8 T120S (6,8)
7 Memutar obeng pada mur
Memegang VCB dan chasing bawah
3 G1a (2)
2 Rl1 (2)
5 Melepas obeng
12,8 ET35 (12,8)
1 Melihat tombol arah
7,3 EF (7,3)
1 Melihat tombol arah
Memegang VCB dan chasing bawah
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau tombol arah
Memegang VCB dan chasing bawah
3 G1a (2)
2 G1a (2)
3 Memegang tombol arah
Memegang VCB dan chasing bawah
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa tombol arah
12,8 ET35 (12,8)
1 Melihat tombol arah
Memegang VCB dan chasing bawah
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan tombol arah untuk
dirakit dengan VCB Memegang VCB dan
chasing bawah 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan tombol
arah 12,8 ET35
(12,8) 1 Melihat tombol arah
2 Rl1 (2)
5 Melepas tombol arah
Memegang VCB dan chasing bawah
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan tombol arah untuk
dirakit dengan VCB 12,8 ET35
(12,8) 1 Melihat tombol arah
Memegang VCB dan chasing bawah
3 G1a (2)
2 Rl1 (2)
5 Melepas tombol arah
Memegang VCB dan chasing bawah
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan tombol arah untuk
dirakit dengan VCB
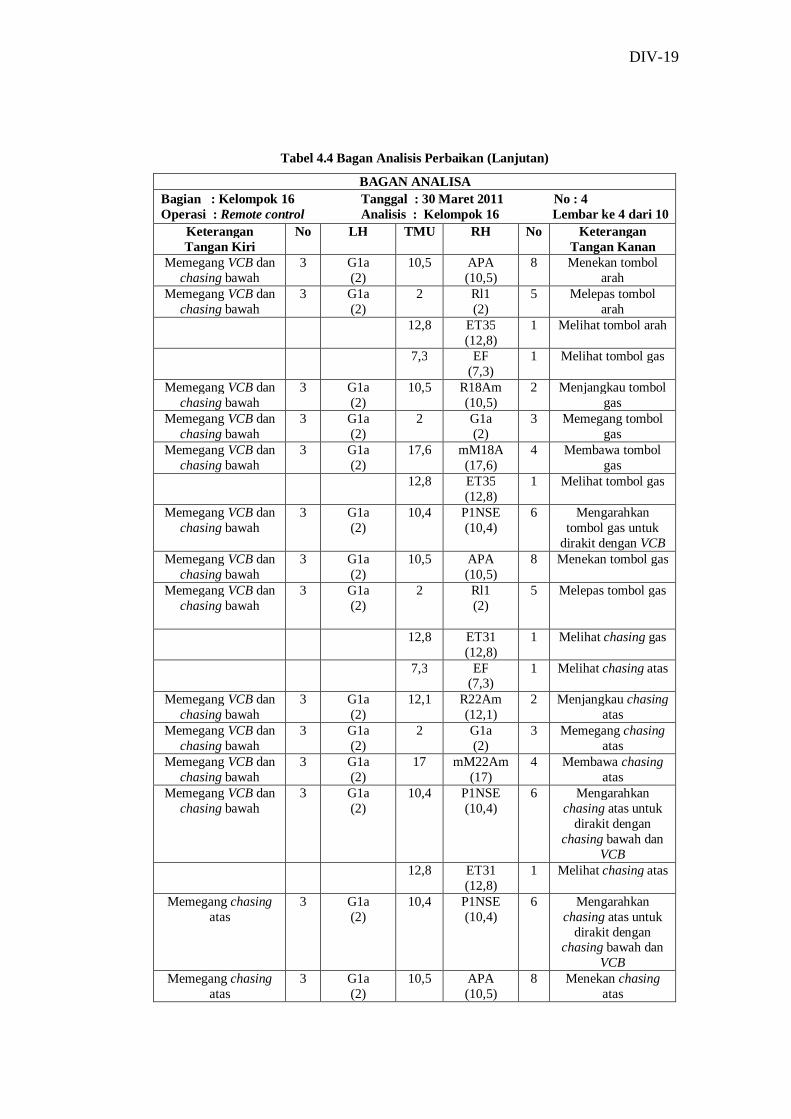
DIV-19
Tabel 4.4 Bagan Analisis Perbaikan (Lanjutan)
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 4 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 4 dari 10
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
Memegang VCB dan chasing bawah
3 G1a (2)
10,5 APA (10,5)
8 Menekan tombol arah
Memegang VCB dan chasing bawah
3 G1a (2)
2 Rl1 (2)
5 Melepas tombol arah
12,8 ET35 (12,8)
1 Melihat tombol arah
7,3 EF (7,3)
1 Melihat tombol gas
Memegang VCB dan chasing bawah
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau tombol gas
Memegang VCB dan chasing bawah
3 G1a (2)
2 G1a (2)
3 Memegang tombol gas
Memegang VCB dan chasing bawah
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa tombol gas
12,8 ET35 (12,8)
1 Melihat tombol gas
Memegang VCB dan chasing bawah
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan tombol gas untuk
dirakit dengan VCB Memegang VCB dan
chasing bawah 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan tombol gas
Memegang VCB dan chasing bawah
3 G1a (2)
2 Rl1 (2)
5 Melepas tombol gas
12,8 ET31 (12,8)
1 Melihat chasing gas
7,3 EF (7,3)
1 Melihat chasing atas
Memegang VCB dan chasing bawah
3 G1a (2)
12,1 R22Am (12,1)
2 Menjangkau chasing atas
Memegang VCB dan chasing bawah
3 G1a (2)
2 G1a (2)
3 Memegang chasing atas
Memegang VCB dan chasing bawah
3 G1a (2)
17 mM22Am (17)
4 Membawa chasing atas
Memegang VCB dan chasing bawah
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan chasing atas untuk
dirakit dengan chasing bawah dan
VCB 12,8 ET31
(12,8) 1 Melihat chasing atas
Memegang chasing atas
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan chasing atas untuk
dirakit dengan chasing bawah dan
VCB Memegang chasing
atas 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan chasing
atas
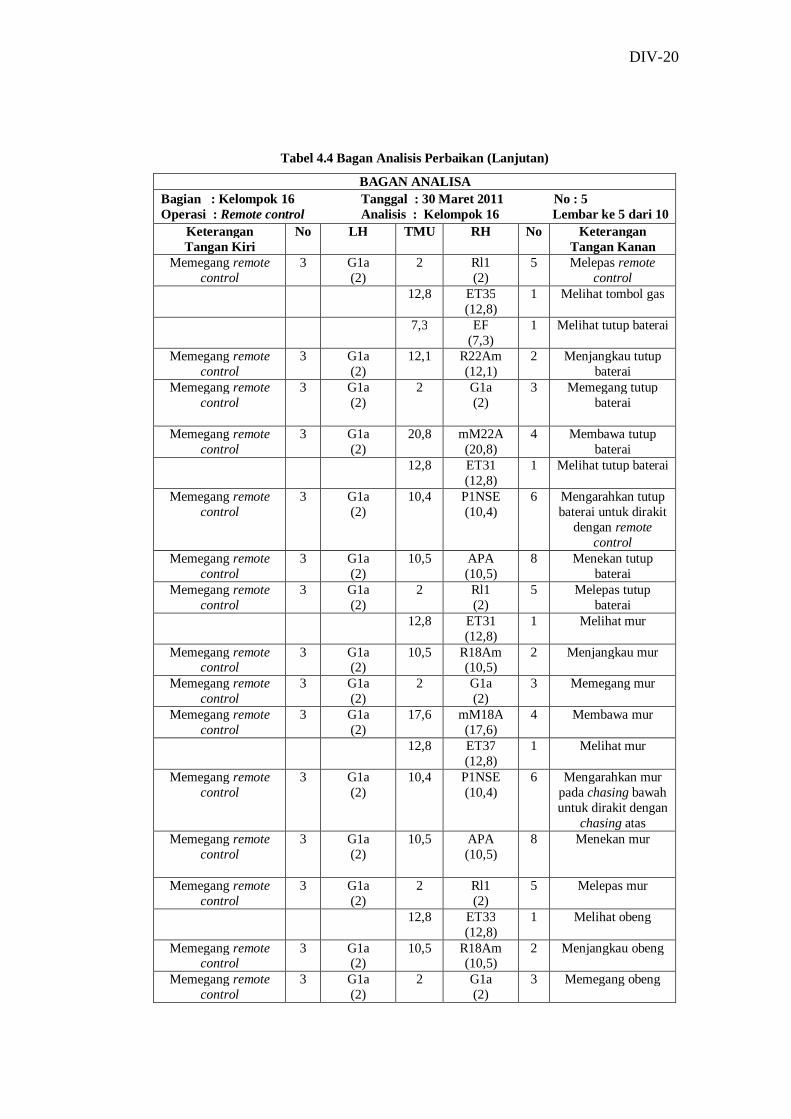
DIV-20
Tabel 4.4 Bagan Analisis Perbaikan (Lanjutan)
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 5 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 5 dari 10
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
Memegang remote control
3 G1a (2)
2 Rl1 (2)
5 Melepas remote control
12,8 ET35 (12,8)
1 Melihat tombol gas
7,3 EF (7,3)
1 Melihat tutup baterai
Memegang remote control
3 G1a (2)
12,1 R22Am (12,1)
2 Menjangkau tutup baterai
Memegang remote control
3 G1a (2)
2 G1a (2)
3 Memegang tutup baterai
Memegang remote control
3 G1a (2)
20,8 mM22A (20,8)
4 Membawa tutup baterai
12,8 ET31 (12,8)
1 Melihat tutup baterai
Memegang remote control
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan tutup baterai untuk dirakit
dengan remote control
Memegang remote control
3 G1a (2)
10,5 APA (10,5)
8 Menekan tutup baterai
Memegang remote control
3 G1a (2)
2 Rl1 (2)
5 Melepas tutup baterai
12,8 ET31 (12,8)
1 Melihat mur
Memegang remote control
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau mur
Memegang remote control
3 G1a (2)
2 G1a (2)
3 Memegang mur
Memegang remote control
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa mur
12,8 ET37 (12,8)
1 Melihat mur
Memegang remote control
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan mur pada chasing bawah untuk dirakit dengan
chasing atas Memegang remote
control 3 G1a
(2) 10,5 APA
(10,5)
8 Menekan mur
Memegang remote control
3 G1a (2)
2 Rl1 (2)
5 Melepas mur
12,8 ET33 (12,8)
1 Melihat obeng
Memegang remote control
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau obeng
Memegang remote control
3 G1a (2)
2 G1a (2)
3 Memegang obeng
DIV-21
Tabel 4.4 Bagan Analisis Perbaikan (Lanjutan)
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 6 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 6 dari 10
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
Memegang remote control
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa obeng
12,8 ET33 (12,8)
1 Melihat obeng
Memegang remote control
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan obeng pada mur untuk
merakit chasinbawah dengan
chasing atas Memegang remote
control 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan obeng
12,8 ET33
(12,8) 1 Melihat Obeng
Memegang remote
control 3 G1a
(2) 6,8 T120S
(6,8) 7 Memutar obeng
pada mur Memegang remote
control 3 G1a
(2) 6,8 T120S
(6,8) 7 Memutar obeng
pada mur Memegang remote
control 3 G1a
(2) 6,8 T120S
(6,8) 7 Memutar obeng
pada mur Memegang remote
control 3 G1a
(2) 2 Rl1
(2) 6 Melepas obeng
12,8 ET37 (12,8)
1 Melihat mur
7,3 EF (7,3)
1 Melihat mur
Memegang remote control
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau mur
Memegang remote control
3 G1a (2)
2 G1a (2)
3 Memegang mur
Memegang remote control
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa mur
12,8 ET37 (12,8)
1 Melihat mur
Memegang remote control
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan mur pada chasing bawah untuk dirakit dengan
chasing atas Memegang remote
control 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan mur
Memegang remote
control 3 G1a
(2) 2 Rl1
(2) 5 Melepas mur
12,8 ET33
(12,8) 1 Melihat obeng
Memegang remote
control 3 G1a
(2) 10,5 R18Am
(10,5) 2 Menjangkau obeng
Memegang remote
control 3 G1a
(2) 2 G1a
(2) 3 Memegang obeng
DIV-22
Tabel 4.4 Bagan Analisis Perbaikan (Lanjutan)
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 7 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 7 dari 10
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
Memegang remote control
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa obeng
12,8 ET33 (12,8)
1 Melihat obeng
Memegang remote control
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan obeng pada mur untuk
merakit chasinbawah dengan
chasing atas Memegang remote
control 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan Obeng
12,8 ET33 (12,8)
1 Melihat Obeng
Memegang remote control
3 G1a (2)
6,8 T120S (6,8)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,8 T120S (6,8)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,8 T120S (6,8)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
2 Rl1 (2)
6 Melepas obeng
12,8 ET33 (12,8)
1 Melihat Obeng
7,3 EF (7,3)
1 Melihat mur
Memegang remote control
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau mur
Memegang remote control
3 G1a (2)
2 G1a (2)
3 Memegang mur
Memegang remote control
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa mur
12,8 ET37 (12,8)
1 Melihat mur
Memegang remote control
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan mur pada chasing bawah untuk dirakit dengan
chasing atas Memegang remote
control 3 G1a
(2) 10,5 APA
(10,5)
8 Menekan mur
Memegang remote control
3 G1a (2)
2 Rl1 (2)
5 Melepas mur
12,8 ET33 (12,8)
1 Melihat obeng
Memegang remote control
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau obeng
DIV-23
Tabel 4.4 Bagan Analisis Perbaikan (Lanjutan)
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 8 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 8 dari 10
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
Memegang remote control
3 G1a (2)
2 G1a (2)
3 Memegang obeng
Memegang remote control
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa obeng
12,8 ET33 (12,8)
1 Melihat obeng
Memegang remote control
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan obeng pada mur untuk
merakit chasinbawah dengan
chasing atas 12,8 ET33
(12,8) 1 Melihat Obeng
Memegang remote
control 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan Obeng
Memegang remote control
3 G1a (2)
6,8 T120S (6,8)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,8 T120S (6,8)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,8 T120S (6,8)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
2 Rl1 (2)
6 Melepas obeng
12,8 ET33 (12,8)
1 Melihat obeng
7,3 EF (7,3)
1 Melihat mur
Memegang remote control
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau mur
Memegang remote control
3 G1a (2)
2 G1a (2)
3 Memegang mur
Memegang remote control
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa mur
12,8 ET37 (12,8)
1 Melihat mur
Memegang remote control
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan mur pada chasing bawah untuk dirakit dengan
chasing atas Memegang remote
control 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan mur
Memegang remote
control 3 G1a
(2) 2 Rl1
(2)
5 Melepas mur
12,8 ET33 (12,8)
1 Melihat obeng
Memegang remote control
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau obeng
DIV-24
Tabel 4.4 Bagan Analisis Perbaikan (Lanjutan)
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 9 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 9 dari 10
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
Memegang remote control
3 G1a (2)
2 G1a (2)
3 Memegang obeng
Memegang remote control
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa obeng
12,8 ET33 (12,8)
1 Melihat obeng
Memegang remote control
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan obeng pada mur untuk
merakit chasinbawah dengan
chasing atas Memegang remote
control 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan Obeng
12,8 ET33 (12,8)
1 Melihat Obeng
Memegang remote control
3 G1a (2)
6,8 T120S (6,8)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,8 T120S (6,8)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,8 T120S (6,8)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
2 Rl1 (2)
6 Melepas obeng
12,8 ET37 (12,8)
1 Melihat mur
7,3 EF (7,3)
1 Melihat mur
Memegang remote control
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau mur
Memegang remote control
3 G1a (2)
2 G1a (2)
3 Memegang mur
Memegang remote control
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa mur
12,8 ET37 (12,8)
1 Melihat mur
Memegang remote control
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan mur pada chasing bawah untuk dirakit dengan
chasing atas Memegang remote
control 3 G1a
(2) 10,5 APA
(10,5) 8 Menekan mur
Memegang remote
control 3 G1a
(2) 2 Rl1
(2) 5 Melepas mur
12,8 ET33
(12,8) 1 Melihat obeng
Memegang remote control
3 G1a (2)
10,5 R18Am (10,5)
2 Menjangkau obeng
DIV-25
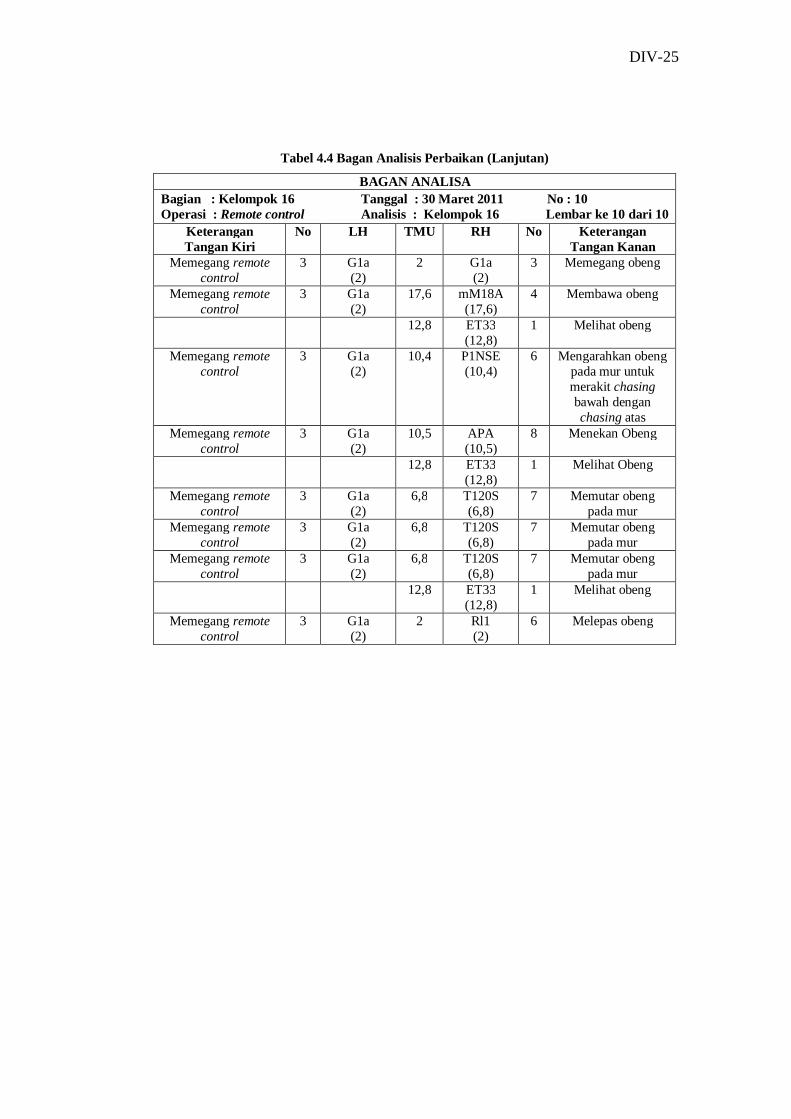
Tabel 4.4 Bagan Analisis Perbaikan (Lanjutan)
BAGAN ANALISA Bagian : Kelompok 16 Tanggal : 30 Maret 2011 No : 10 Operasi : Remote control Analisis : Kelompok 16 Lembar ke 10 dari 10
Keterangan Tangan Kiri
No LH TMU RH No Keterangan Tangan Kanan
Memegang remote control
3 G1a (2)
2 G1a (2)
3 Memegang obeng
Memegang remote control
3 G1a (2)
17,6 mM18A (17,6)
4 Membawa obeng
12,8
ET33 (12,8)
1 Melihat obeng
Memegang remote control
3 G1a (2)
10,4 P1NSE (10,4)
6 Mengarahkan obeng pada mur untuk merakit chasing bawah dengan chasing atas
Memegang remote control
3 G1a (2)
10,5 APA (10,5)
8 Menekan Obeng
12,8 ET33 (12,8)
1 Melihat Obeng
Memegang remote control
3 G1a (2)
6,8 T120S (6,8)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,8 T120S (6,8)
7 Memutar obeng pada mur
Memegang remote control
3 G1a (2)
6,8 T120S (6,8)
7 Memutar obeng pada mur
12,8 ET33 (12,8)
1 Melihat obeng
Memegang remote control
3 G1a (2)
2 Rl1 (2)
6 Melepas obeng
DIV-26
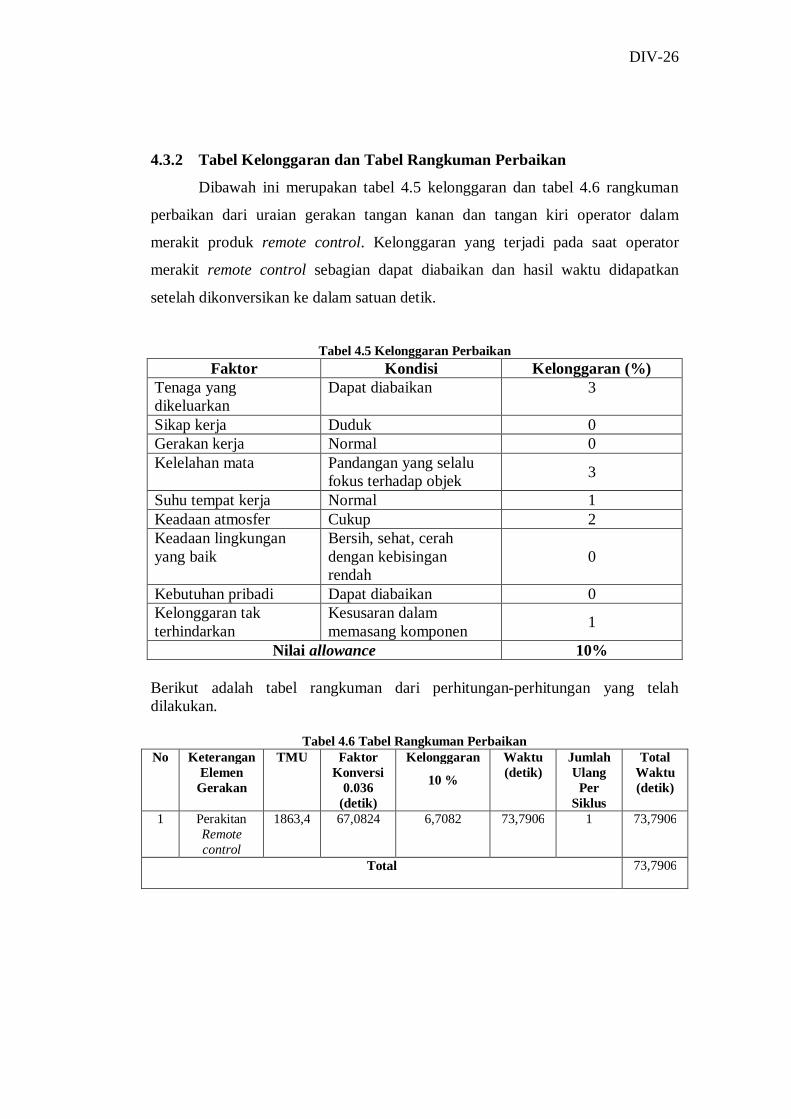
4.3.2 Tabel Kelonggaran dan Tabel Rangkuman Perbaikan
Dibawah ini merupakan tabel 4.5 kelonggaran dan tabel 4.6 rangkuman
perbaikan dari uraian gerakan tangan kanan dan tangan kiri operator dalam
merakit produk remote control. Kelonggaran yang terjadi pada saat operator
merakit remote control sebagian dapat diabaikan dan hasil waktu didapatkan
setelah dikonversikan ke dalam satuan detik.
Tabel 4.5 Kelonggaran Perbaikan
Faktor Kondisi Kelonggaran (%) Tenaga yang dikeluarkan
Dapat diabaikan 3
Sikap kerja Duduk 0 Gerakan kerja Normal 0 Kelelahan mata Pandangan yang selalu
fokus terhadap objek 3
Suhu tempat kerja Normal 1 Keadaan atmosfer Cukup 2 Keadaan lingkungan yang baik
Bersih, sehat, cerah dengan kebisingan rendah
0
Kebutuhan pribadi Dapat diabaikan 0 Kelonggaran tak terhindarkan
Kesusaran dalam memasang komponen 1
Nilai allowance 10% Berikut adalah tabel rangkuman dari perhitungan-perhitungan yang telah dilakukan.
Tabel 4.6 Tabel Rangkuman Perbaikan No Keterangan
Elemen Gerakan
TMU Faktor Konversi
0.036 (detik)
Kelonggaran
10 %
Waktu (detik)
Jumlah Ulang
Per Siklus
Total Waktu (detik)
1 Perakitan Remote control
1863,4 67,0824
6,7082
73,7906
1 73,7906
Total 73,7906

DIV-27
Pada bagan analisis perbaikan diketahui total waktu yang diperlukan untuk
merakit sebuah remote control yaitu sebesar 73,7906 detik. Perhitungan waktu
analisis lebih cepat karena dilakukan pengurangan-pengurangan aktivitas operator
yang dianggap tidak perlu., pengurangan aktivitas yang tidak perlu bertujuan
untuk menghemat waktu dan tenga operator yang bekerja. Gerakan operator
selain di kurangkan gerakan tersebut juga diseimbangkan anatara gerakan tangan
kanan dan tangan kiri sehingga perbedaan waktu anatara penguraian gerakan
operator yang belum dikurangkan dengan gerakan operator yang sudah di
kurangkan dan diperbaiki hasilnya sangat berbeda jauh. Perbedaan itu di sebabkan
oleh gerakan operator yang telah seimbang sehingga pekerjaan tersebut dapat
selesai dengan cepat dan mengurangi kelelahan operator.
Besar kelonggaran yang diberikan pada bagan analisis yaitu sebesar 10 %.
Kelonggaran yang terjadi pada bagan perbaikan ini lebih kecil karena operator
yang bekerja sudah terlatih dan lebih memahami lingkungan kerja.





























