Embed Size (px)
Citation preview
Abstrakt
Tato práce se zabývá elektrickými a mechanickými vlastnostmi elektronicky
komutovaných motorů. Popisuje konstrukci motoru, srovnání s dalšími typy motorů, řízení
proudů ve statoru, rovnice popisující chování motoru, využití v průmyslu a seznam
výrobců s některými katalogovými výrobky.
Abstract
This thesis deals with electrical and mechanical parametrs of electronical comutated
motors. It describes construction of motor, comparing with another types of motors,
controlling of curent in stator, equations describing behavior of motor, using in industry
and an inventory of producers with some catalogue’s products.

Poděkování
Na tomto místě bych chtěl poděkovat Ing. Vladimíru Hubíkovi za pomoc při
vypracování této práce.

Čestné prohlášení Čestně prohlašuji, že bakalářskou práci na téma Elektrické a mechanické vlastnosti EC motorů jsem vypracoval samostatně pod vedením svého vedoucího bakalářské práce s použitím odborné literatury, kterou jsem citoval v seznamu použité literatury. V Brně dne…………………… ….…………………………..
Martin PLEVA
Obsah
1. ÚVOD .................................................................................................. 11
2. SVĚT MOTORŮ .................................................................................. 12
2.1. Motory střídavé (AC motory) .................................................................. 12
2.1.1. Asynchronní motory ................................................................................ 12
2.1.2. Synchronní motory .................................................................................. 13
2.2. Motory stejnosměrné (DC, EC) motory .................................................. 14
2.2.1. DC motory ............................................................................................... 14
3. ELEKTRONICKY KOMUTOVANÝ (EC, BLDC) MOTOR ................... 16
3.1. Historie ........................................................................................................ 16
3.2. Konstrukce EC motoru ............................................................................. 16
3.2.1. Diskové versus válcové motory .............................................................. 18
3.2.2. Výkonové rozdělení EC motorů .............................................................. 20
3.2.3. Stator ....................................................................................................... 21
3.2.4. Rotor ........................................................................................................ 23
3.2.5. Ztráty ....................................................................................................... 23
4. ROZDÍLY MEZI AC, DC A EC POHONY ............................................ 24
4.1. AC pohony .................................................................................................. 24
4.1.1. Asynchronní pohony ............................................................................... 24
4.1.2. Synchronní pohony.................................................................................. 24
4.2. DC pohony .................................................................................................. 25
4.3. EC pohony .................................................................................................. 26
5. ŘÍZENÍ PROUDŮ EC MOTORŮ ......................................................... 27
5.1. Hallovy sondy ............................................................................................. 27
5.2. IRC (Incremental radial senzor) .............................................................. 29
5.3. Resolver ....................................................................................................... 29
6. MATEMATICKÉ A ELEKTRICKÉ ROVNICE EC MOTORU .............. 30
6.1. Pohybové rovnice pro obecný motor ........................................................ 30
6.2. Elektrické a mechanické rovnice .............................................................. 31
7. PŘEHLED VYRÁBĚNÝCH EC MOTORŮ NA TRHU ......................... 34
7.1. Maxon motor AG ....................................................................................... 34
7.1.1. Válcové motory Maxon motor AG ......................................................... 34
7.1.2. Diskové motory Maxon motor AG ......................................................... 37
7.2. Dunkermotoren .......................................................................................... 37
7.3. EAD motors ................................................................................................ 38
7.4. Další výrobci motorů ................................................................................. 38
8. ZÁVĚR ................................................................................................ 39
9. SEZNAM POUŽITÉ LITERATURY ..................................................... 41

Použité symboly
1,2
tan 2
tan 1
ln
cov
ph
Z
m
d
i
iH
z
c kons ta motoru
E indukované napětí fáze
I proud
I záběrný proud
J moment setrvačnosti
k kons ta motoru
M moment motoru
M moment dynamický
M moment záběrný
M ideá í záběrný moment
M moment pra ního mec
−
−
−
−
−
−
−
−
−
−
−
1,2
i
ph
hanismu
M generovaný moment
n otáčky
n otáčky na prázdno
R odpor fáze
t čas
U napětí
natočení
účinnost
uhlová rychlost
ϕηω
−
−
−
−
−
−
−
−
−

ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 11 -
1. ÚVOD
Lidstvo už od pradávných dob hledalo způsoby, jak zjednodušit leckteré úkony. Již
v dobách pravěkých si Homo Habilis začal ulehčovat práci výrobou primitivních nástrojů
z kamene. Doba ale pokročila. Dnes naši planetu obývá více jak 6 miliard Homo Sapiens
Sapiens, což je člověk moudrý. Jak už ze slova moudrý plyne, tento tvor byl stvořen
k tomu, aby vynalézal nejrůznější nástroje a přístroje, potřebné ke svým činnostem a
rozvoji civilizací. Už ze starověkého Řecka se dozvídáme o jednoduchých mechanických
vynálezech a formulacích zákonů platných dodnes.
Největší rozvoj vědy a techniky, přesněji elektrotechniky, přišel v 19. století
s nástupem elektrické energie. Za rozvoj této, v dnešní době nepostradatelné, energie asi
nejvíce vděčíme americkému vynálezci a průkopníkovi Thomasi Alva Edisonovi, který
vymyslel a zkonstruoval mnoho vynálezů a započal distribuci této energie do všech koutů
světa. Měl bych se také zmínit o dalších vědcích a objevitelích jako jsou Georg Simon
Ohm, který jako první v roce 1826 formuloval zákon o závislosti el. proudu, napětí a
odporu, dnes nazývaný Ohmův zákon. Peter Barlow v roce 1828 vynalezl první elektrický
motor. Michael Faraday objevil v roce 1831 elektromagnetickou indukci a dal tak základ
„teorii o elektromagnetické indukci“. Heinrich Lenz v roce 1833 formuloval zákon o
směru indukovaného proudu, kterým se řídí směr otáčení rotoru v elektrickém motoru. A
také mnoho dalších vědců jako jsou například J.P. Joule (přeměna elektrické energie na
tepelnou), J.C. Maxwell, W. Siemens, N. Tesla nebo z českých vynálezců František Křižík.
Všichni tito vědci a spousta dalších přispěli svým dílem k novodobým objevům a
nástrojům pro využití elektrické energie.
Z velkých možností využití elektrické energie se zaměřím na elektrickou energii
převedenou v energii mechanickou, která se využívá jako pohony v nejrůznějších
odvětvích hospodářství. Dále se zaměřím na motory a to motory malé, tedy mikromotory,
ze kterých si vyberu zvláštní případ, elektricky komutované motory.
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 12 -
2. SVĚT MOTORŮ
Z časopisu Industrial Engineering News: „Podle rozboru z konce roku 1999 malé
motory tvoří 83% všech motorů v průmyslu. Na jeden výkonný elektromotor ve stroji
připadají 3 až 4 malé motory“. (citováno z [6]).
Současně však chybí informovanost široké veřejnosti o těchto malých (mikro)
motorech. Pokusím se tedy přiblížit základní vlastnosti mikromotorů, a jak už téma
napovídá, hlavně bude řeč o EC motorech, které patří do skupiny stejnosměrných,
synchronně se otáčejících mikromotorů a jsou odvozené ze stejnosměrných (DC) motorů.
V této kapitole se budu věnovat rozdělení všech typů motorů do skupin, z hlediska
napájení, výkonů a využití, abychom se dobrali podstaty mikromotorů, DC, zvláště EC
motorů.
2.1. Motory střídavé (AC motory)
Střídavé motory jsou využívány k pohonům větších až velkých strojů, jako jsou
například ventilátory, okružní pily nebo pohony lodí. Musíme ale zohlednit výkonové
třídy, rostou řádově od stovek Wattů až po několik set megawattů. Střídavý motor
zapojený tak, aby dodával elektrickou energii do sítě se nazývá generátor, v případě
synchronního generátoru - alternátor. Jen pro představu, jedny z nejvýkonnějších
generátorů v současné době u nás, se nacházejí ve vodní přečerpávací elektrárně Dlouhé
Stráně. Jsou zde umístěny dva o celkovém výkonu 650 MW.
Tyto motory se dále dělí na ASYNCHRONNÍ a SYNCHRONNÍ:
2.1.1. Asynchronní motory
Tyto stroje fungují na principu existence točivého magnetického pole. Toto pole
vzniká při zapojení tří cívek do kruhu, každá pod úhlem 120°, a jsou napájeny třífázovým
napětím. Každá ze tří cívek tohoto zapojení vytváří magnetické pole, jehož složením
vzniká pole točivé. Točivé pole působí na vodiče (vinutí) v rotoru. Podle Lenzova zákona
se indukují proudy a rotor se roztáčí ve směru působení elektromagnetické síly, vyvolané
tímto polem. Musí však být zabezpečeno natočení magnetických polí, jinak by se rotor
zastavil.
Asynchronní motor disponuje, oproti synchronnímu, jinou skladbou rotoru. Rotor
asynchronního motoru je tvořen vinutím na koncích spojených do krátka. Ve stojícím
motoru magnetické pole statoru indukuje v kotvě elektrické proudy, které vytváří
magnetické pole v rotoru. Obě pole pak navzájem interagují a vznikne tak
elektromotorická síla, která točí rotorem. Otáčky rotoru vzrůstají až do chvíle, než by
motor mohl dosáhnout synchronních otáček. Motor ale nikdy nedosáhne synchronních
otáček, pokud je alespoň minimálně zatížen na rotoru, proto je nazýván asynchronní.
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 13 -
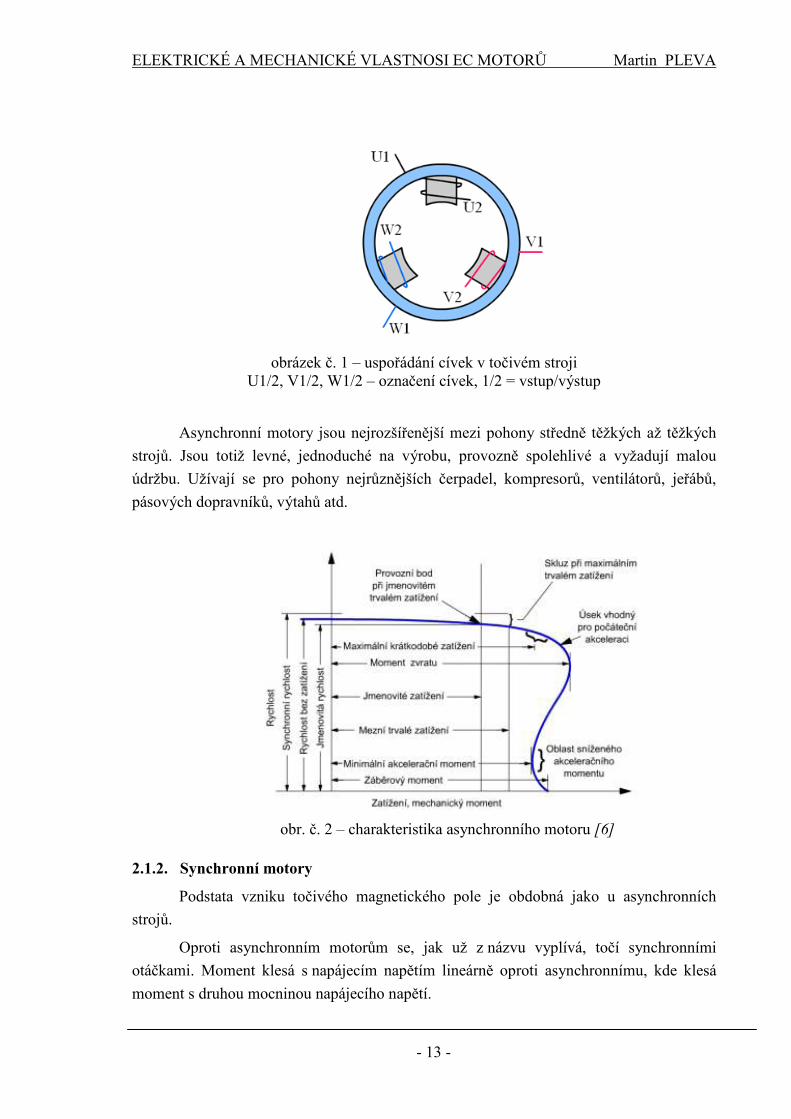
obrázek č. 1 – uspořádání cívek v točivém stroji U1/2, V1/2, W1/2 – označení cívek, 1/2 = vstup/výstup
Asynchronní motory jsou nejrozšířenější mezi pohony středně těžkých až těžkých
strojů. Jsou totiž levné, jednoduché na výrobu, provozně spolehlivé a vyžadují malou
údržbu. Užívají se pro pohony nejrůznějších čerpadel, kompresorů, ventilátorů, jeřábů,
pásových dopravníků, výtahů atd.
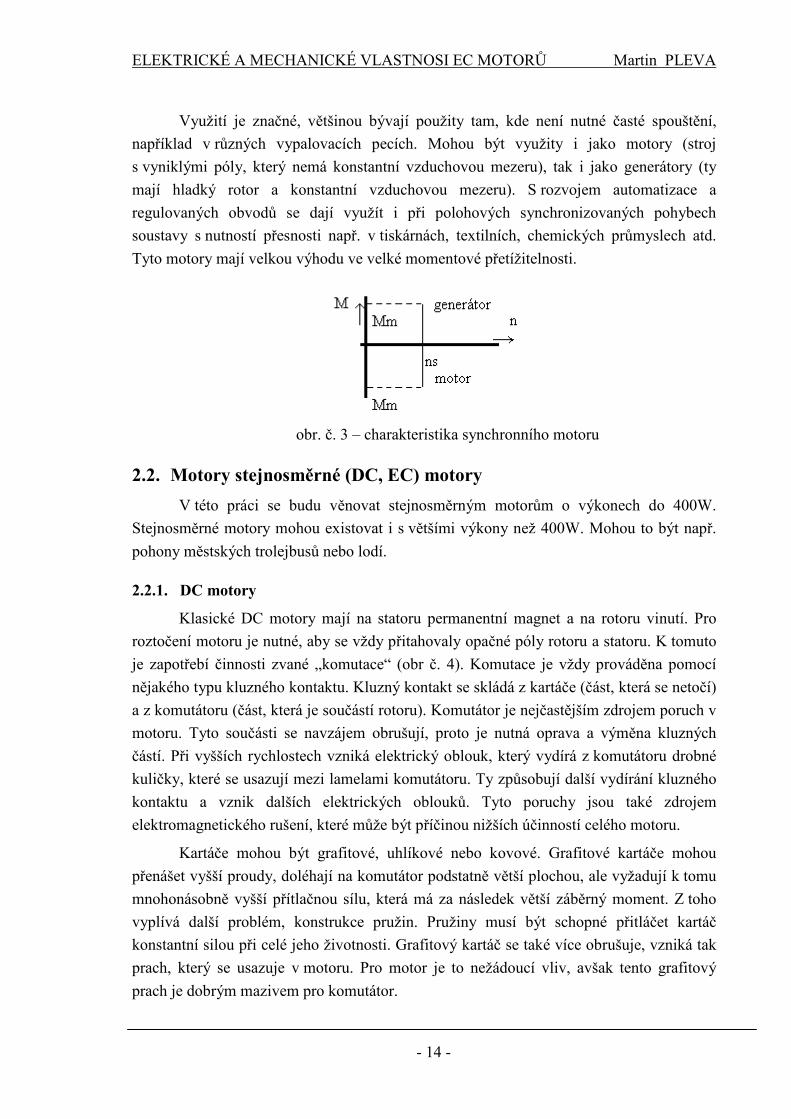
obr. č. 2 – charakteristika asynchronního motoru [6]
2.1.2. Synchronní motory
Podstata vzniku točivého magnetického pole je obdobná jako u asynchronních
strojů.
Oproti asynchronním motorům se, jak už z názvu vyplívá, točí synchronními
otáčkami. Moment klesá s napájecím napětím lineárně oproti asynchronnímu, kde klesá
moment s druhou mocninou napájecího napětí.
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 14 -
Využití je značné, většinou bývají použity tam, kde není nutné časté spouštění,
například v různých vypalovacích pecích. Mohou být využity i jako motory (stroj
s vyniklými póly, který nemá konstantní vzduchovou mezeru), tak i jako generátory (ty
mají hladký rotor a konstantní vzduchovou mezeru). S rozvojem automatizace a
regulovaných obvodů se dají využít i při polohových synchronizovaných pohybech
soustavy s nutností přesnosti např. v tiskárnách, textilních, chemických průmyslech atd.
Tyto motory mají velkou výhodu ve velké momentové přetížitelnosti.
obr. č. 3 – charakteristika synchronního motoru
2.2. Motory stejnosměrné (DC, EC) motory
V této práci se budu věnovat stejnosměrným motorům o výkonech do 400W.
Stejnosměrné motory mohou existovat i s většími výkony než 400W. Mohou to být např.
pohony městských trolejbusů nebo lodí.
2.2.1. DC motory
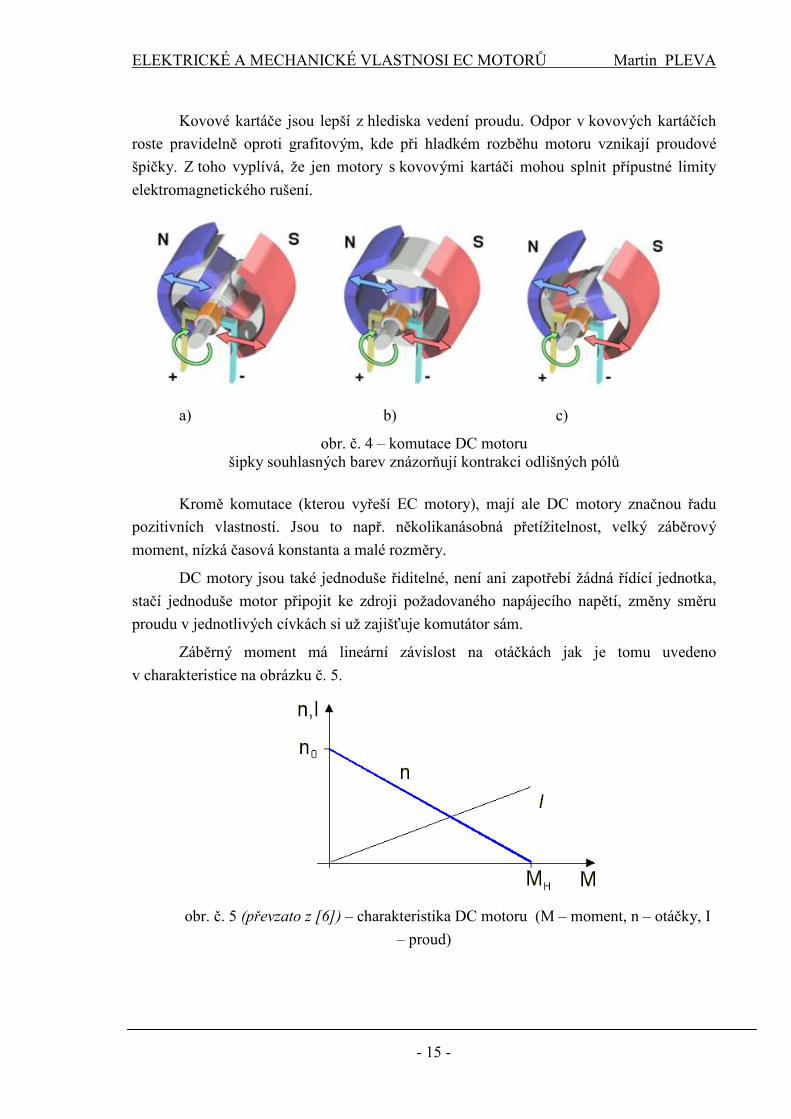
Klasické DC motory mají na statoru permanentní magnet a na rotoru vinutí. Pro
roztočení motoru je nutné, aby se vždy přitahovaly opačné póly rotoru a statoru. K tomuto
je zapotřebí činnosti zvané „komutace“ (obr č. 4). Komutace je vždy prováděna pomocí
nějakého typu kluzného kontaktu. Kluzný kontakt se skládá z kartáče (část, která se netočí)
a z komutátoru (část, která je součástí rotoru). Komutátor je nejčastějším zdrojem poruch v
motoru. Tyto součásti se navzájem obrušují, proto je nutná oprava a výměna kluzných
částí. Při vyšších rychlostech vzniká elektrický oblouk, který vydírá z komutátoru drobné
kuličky, které se usazují mezi lamelami komutátoru. Ty způsobují další vydírání kluzného
kontaktu a vznik dalších elektrických oblouků. Tyto poruchy jsou také zdrojem
elektromagnetického rušení, které může být příčinou nižších účinností celého motoru.
Kartáče mohou být grafitové, uhlíkové nebo kovové. Grafitové kartáče mohou
přenášet vyšší proudy, doléhají na komutátor podstatně větší plochou, ale vyžadují k tomu
mnohonásobně vyšší přítlačnou sílu, která má za následek větší záběrný moment. Z toho
vyplívá další problém, konstrukce pružin. Pružiny musí být schopné přitláčet kartáč
konstantní silou při celé jeho životnosti. Grafitový kartáč se také více obrušuje, vzniká tak
prach, který se usazuje v motoru. Pro motor je to nežádoucí vliv, avšak tento grafitový
prach je dobrým mazivem pro komutátor.
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 15 -
Kovové kartáče jsou lepší z hlediska vedení proudu. Odpor v kovových kartáčích
roste pravidelně oproti grafitovým, kde při hladkém rozběhu motoru vznikají proudové
špičky. Z toho vyplívá, že jen motory s kovovými kartáči mohou splnit přípustné limity
elektromagnetického rušení.
a) b) c)
obr. č. 4 – komutace DC motoru šipky souhlasných barev znázorňují kontrakci odlišných pólů
Kromě komutace (kterou vyřeší EC motory), mají ale DC motory značnou řadu
pozitivních vlastností. Jsou to např. několikanásobná přetížitelnost, velký záběrový
moment, nízká časová konstanta a malé rozměry.
DC motory jsou také jednoduše řiditelné, není ani zapotřebí žádná řídící jednotka,
stačí jednoduše motor připojit ke zdroji požadovaného napájecího napětí, změny směru
proudu v jednotlivých cívkách si už zajišťuje komutátor sám.
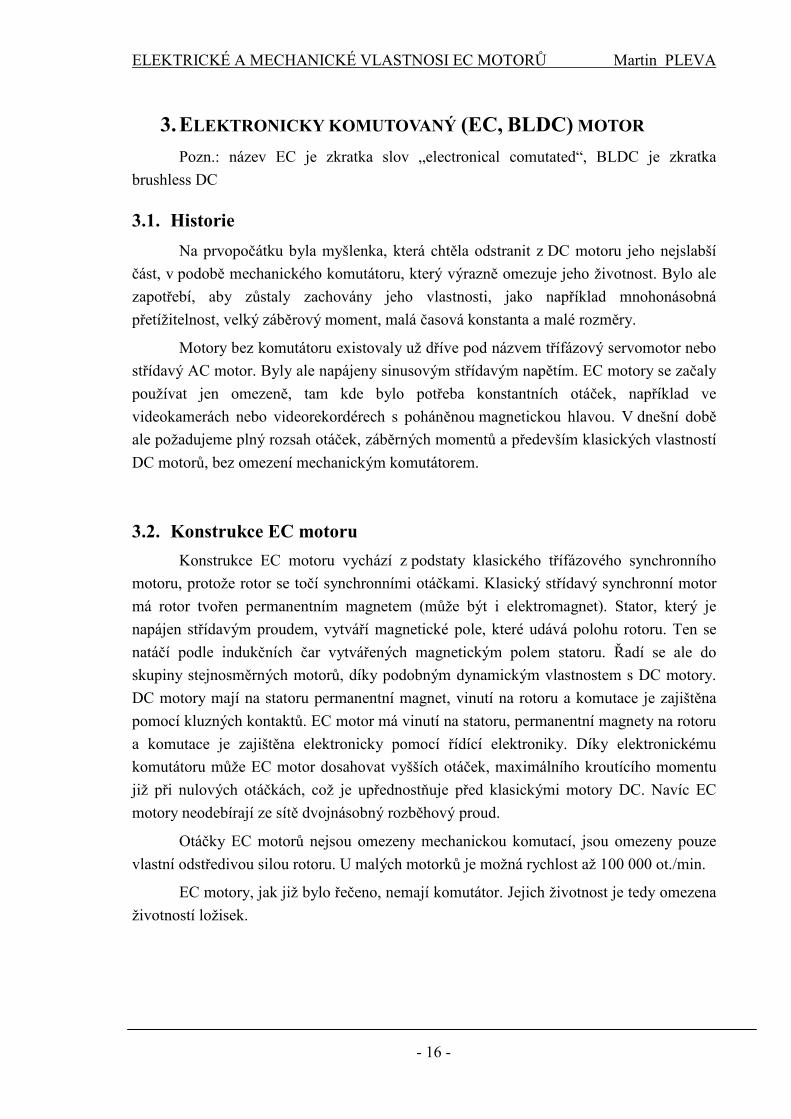
Záběrný moment má lineární závislost na otáčkách jak je tomu uvedeno
v charakteristice na obrázku č. 5.
obr. č. 5 (převzato z [6]) – charakteristika DC motoru (M – moment, n – otáčky, I
– proud)
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 16 -
3. ELEKTRONICKY KOMUTOVANÝ (EC, BLDC) MOTOR
Pozn.: název EC je zkratka slov „electronical comutated“, BLDC je zkratka
brushless DC
3.1. Historie
Na prvopočátku byla myšlenka, která chtěla odstranit z DC motoru jeho nejslabší
část, v podobě mechanického komutátoru, který výrazně omezuje jeho životnost. Bylo ale
zapotřebí, aby zůstaly zachovány jeho vlastnosti, jako například mnohonásobná
přetížitelnost, velký záběrový moment, malá časová konstanta a malé rozměry.
Motory bez komutátoru existovaly už dříve pod názvem třífázový servomotor nebo
střídavý AC motor. Byly ale napájeny sinusovým střídavým napětím. EC motory se začaly
používat jen omezeně, tam kde bylo potřeba konstantních otáček, například ve
videokamerách nebo videorekordérech s poháněnou magnetickou hlavou. V dnešní době
ale požadujeme plný rozsah otáček, záběrných momentů a především klasických vlastností
DC motorů, bez omezení mechanickým komutátorem.
3.2. Konstrukce EC motoru
Konstrukce EC motoru vychází z podstaty klasického třífázového synchronního
motoru, protože rotor se točí synchronními otáčkami. Klasický střídavý synchronní motor
má rotor tvořen permanentním magnetem (může být i elektromagnet). Stator, který je
napájen střídavým proudem, vytváří magnetické pole, které udává polohu rotoru. Ten se
natáčí podle indukčních čar vytvářených magnetickým polem statoru. Řadí se ale do
skupiny stejnosměrných motorů, díky podobným dynamickým vlastnostem s DC motory.
DC motory mají na statoru permanentní magnet, vinutí na rotoru a komutace je zajištěna
pomocí kluzných kontaktů. EC motor má vinutí na statoru, permanentní magnety na rotoru
a komutace je zajištěna elektronicky pomocí řídící elektroniky. Díky elektronickému
komutátoru může EC motor dosahovat vyšších otáček, maximálního kroutícího momentu
již při nulových otáčkách, což je upřednostňuje před klasickými motory DC. Navíc EC
motory neodebírají ze sítě dvojnásobný rozběhový proud.
Otáčky EC motorů nejsou omezeny mechanickou komutací, jsou omezeny pouze
vlastní odstředivou silou rotoru. U malých motorků je možná rychlost až 100 000 ot./min.
EC motory, jak již bylo řečeno, nemají komutátor. Jejich životnost je tedy omezena
životností ložisek.
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 17 -
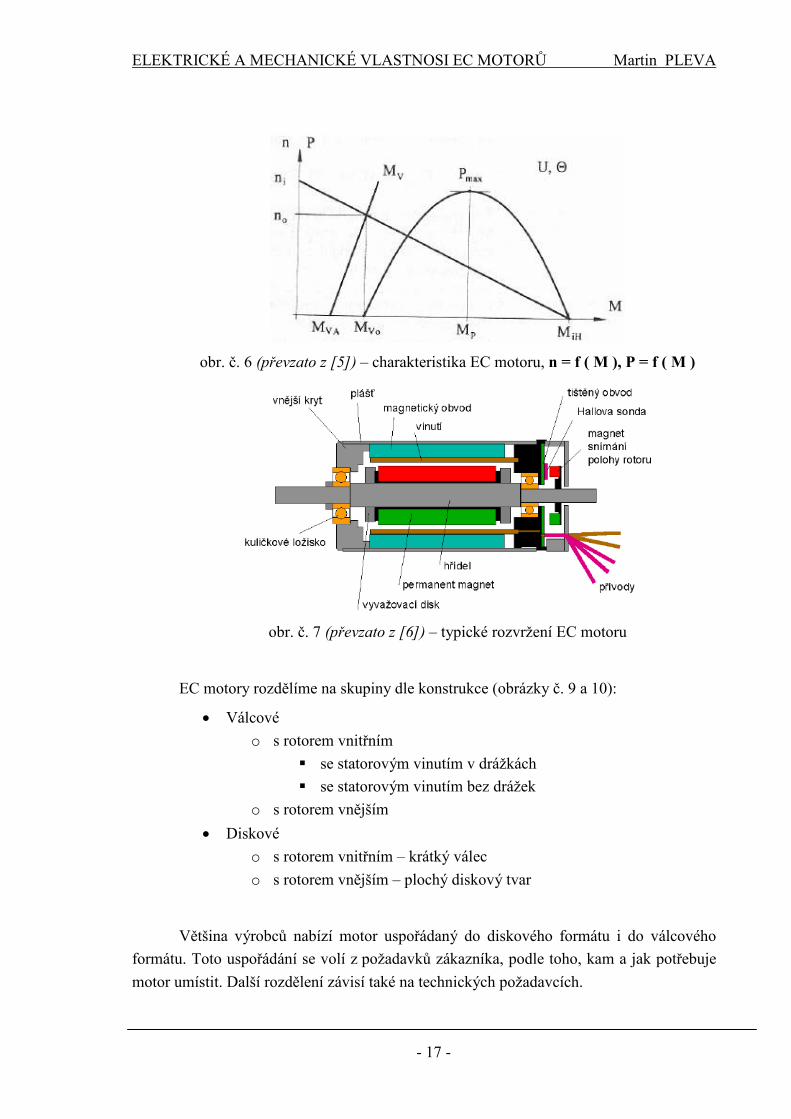
obr. č. 6 (převzato z [5]) – charakteristika EC motoru, n = f ( M ), P = f ( M )
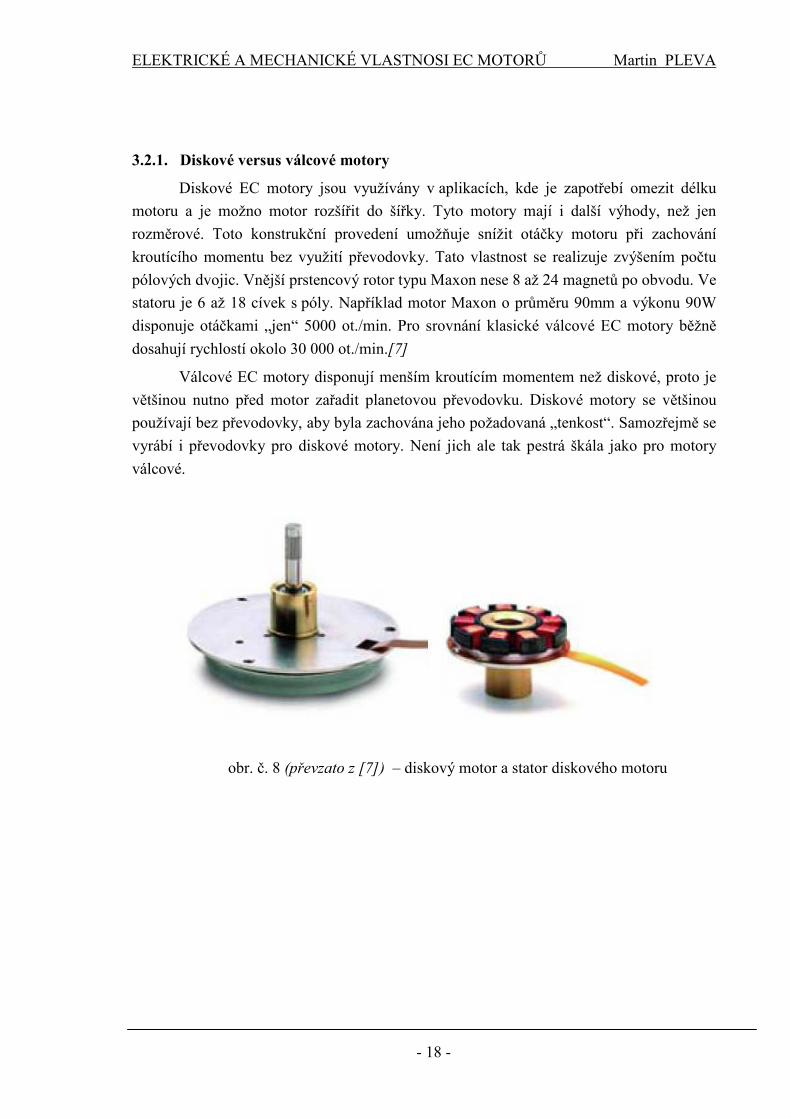
obr. č. 7 (převzato z [6]) – typické rozvržení EC motoru
EC motory rozdělíme na skupiny dle konstrukce (obrázky č. 9 a 10):
• Válcové
o s rotorem vnitřním
� se statorovým vinutím v drážkách
� se statorovým vinutím bez drážek
o s rotorem vnějším
• Diskové
o s rotorem vnitřním – krátký válec
o s rotorem vnějším – plochý diskový tvar
Většina výrobců nabízí motor uspořádaný do diskového formátu i do válcového
formátu. Toto uspořádání se volí z požadavků zákazníka, podle toho, kam a jak potřebuje
motor umístit. Další rozdělení závisí také na technických požadavcích.
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 18 -
3.2.1. Diskové versus válcové motory
Diskové EC motory jsou využívány v aplikacích, kde je zapotřebí omezit délku
motoru a je možno motor rozšířit do šířky. Tyto motory mají i další výhody, než jen
rozměrové. Toto konstrukční provedení umožňuje snížit otáčky motoru při zachování
kroutícího momentu bez využití převodovky. Tato vlastnost se realizuje zvýšením počtu
pólových dvojic. Vnější prstencový rotor typu Maxon nese 8 až 24 magnetů po obvodu. Ve
statoru je 6 až 18 cívek s póly. Například motor Maxon o průměru 90mm a výkonu 90W
disponuje otáčkami „jen“ 5000 ot./min. Pro srovnání klasické válcové EC motory běžně
dosahují rychlostí okolo 30 000 ot./min.[7]
Válcové EC motory disponují menším kroutícím momentem než diskové, proto je
většinou nutno před motor zařadit planetovou převodovku. Diskové motory se většinou
používají bez převodovky, aby byla zachována jeho požadovaná „tenkost“. Samozřejmě se
vyrábí i převodovky pro diskové motory. Není jich ale tak pestrá škála jako pro motory
válcové.
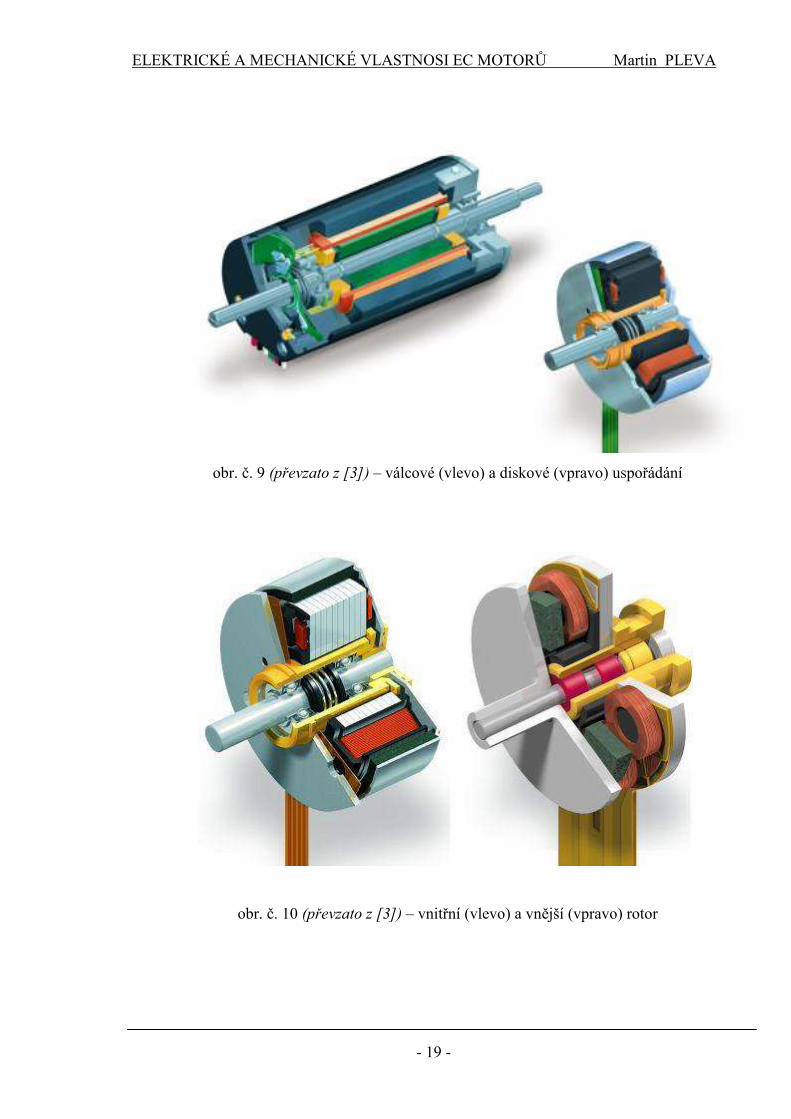
obr. č. 8 (převzato z [7]) – diskový motor a stator diskového motoru
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 19 -
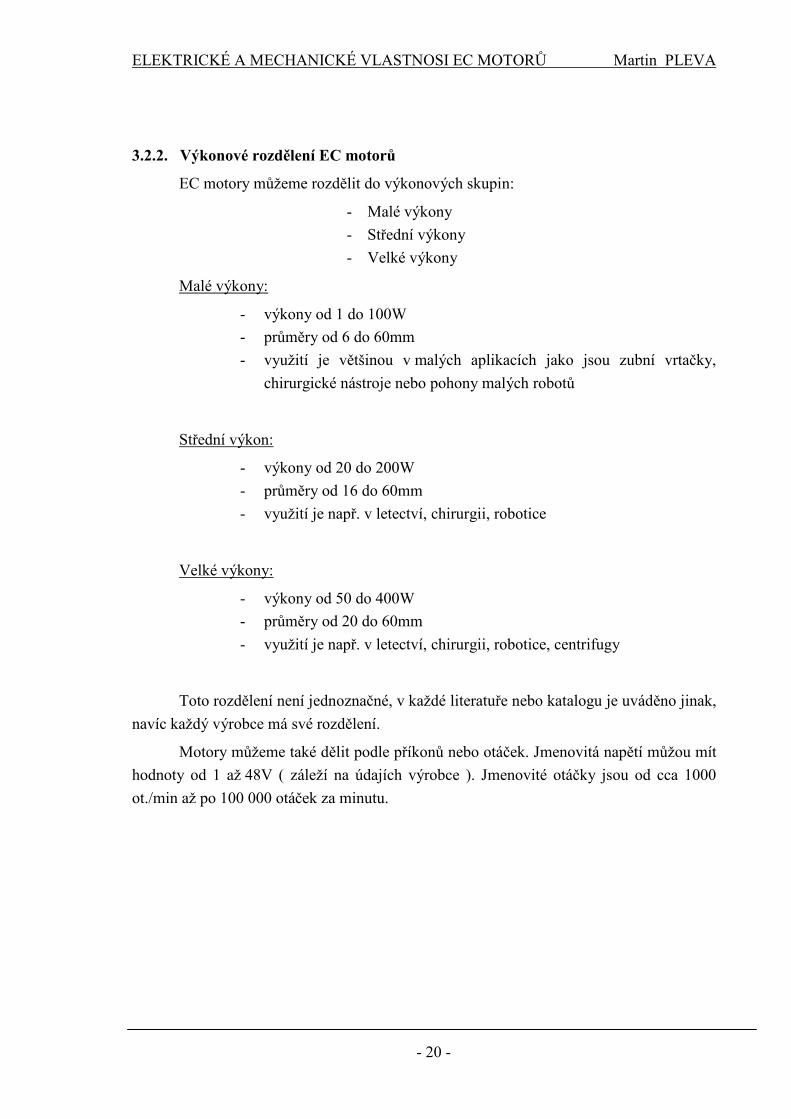
obr. č. 9 (převzato z [3]) – válcové (vlevo) a diskové (vpravo) uspořádání
obr. č. 10 (převzato z [3]) – vnitřní (vlevo) a vnější (vpravo) rotor
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 20 -
3.2.2. Výkonové rozdělení EC motorů
EC motory můžeme rozdělit do výkonových skupin:
- Malé výkony
- Střední výkony
- Velké výkony
Malé výkony:
- výkony od 1 do 100W
- průměry od 6 do 60mm
- využití je většinou v malých aplikacích jako jsou zubní vrtačky,
chirurgické nástroje nebo pohony malých robotů
Střední výkon:
- výkony od 20 do 200W
- průměry od 16 do 60mm
- využití je např. v letectví, chirurgii, robotice
Velké výkony:
- výkony od 50 do 400W
- průměry od 20 do 60mm
- využití je např. v letectví, chirurgii, robotice, centrifugy
Toto rozdělení není jednoznačné, v každé literatuře nebo katalogu je uváděno jinak,
navíc každý výrobce má své rozdělení.
Motory můžeme také dělit podle příkonů nebo otáček. Jmenovitá napětí můžou mít
hodnoty od 1 až 48V ( záleží na údajích výrobce ). Jmenovité otáčky jsou od cca 1000
ot./min až po 100 000 otáček za minutu.
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 21 -
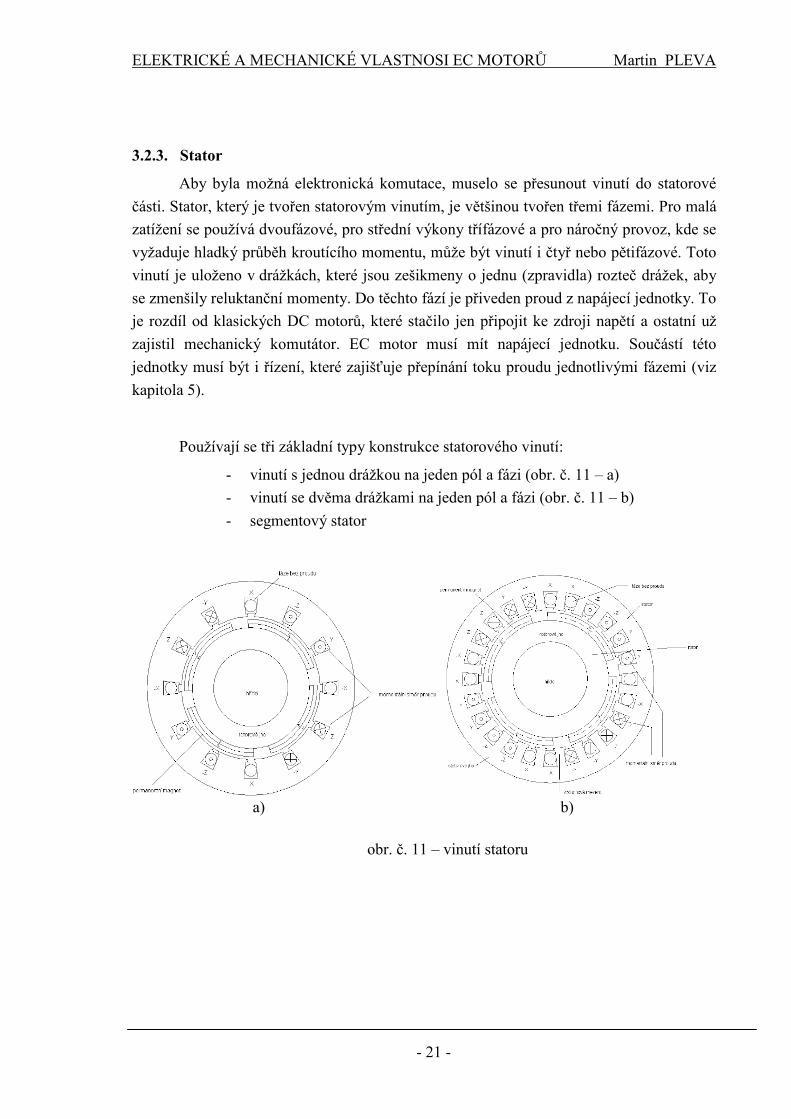
3.2.3. Stator
Aby byla možná elektronická komutace, muselo se přesunout vinutí do statorové
části. Stator, který je tvořen statorovým vinutím, je většinou tvořen třemi fázemi. Pro malá
zatížení se používá dvoufázové, pro střední výkony třífázové a pro náročný provoz, kde se
vyžaduje hladký průběh kroutícího momentu, může být vinutí i čtyř nebo pětifázové. Toto
vinutí je uloženo v drážkách, které jsou zešikmeny o jednu (zpravidla) rozteč drážek, aby
se zmenšily reluktanční momenty. Do těchto fází je přiveden proud z napájecí jednotky. To
je rozdíl od klasických DC motorů, které stačilo jen připojit ke zdroji napětí a ostatní už
zajistil mechanický komutátor. EC motor musí mít napájecí jednotku. Součástí této
jednotky musí být i řízení, které zajišťuje přepínání toku proudu jednotlivými fázemi (viz
kapitola 5).
Používají se tři základní typy konstrukce statorového vinutí:
- vinutí s jednou drážkou na jeden pól a fázi (obr. č. 11 – a)
- vinutí se dvěma drážkami na jeden pól a fázi (obr. č. 11 – b)
- segmentový stator
a) b)
obr. č. 11 – vinutí statoru
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 22 -
a) b)
c)
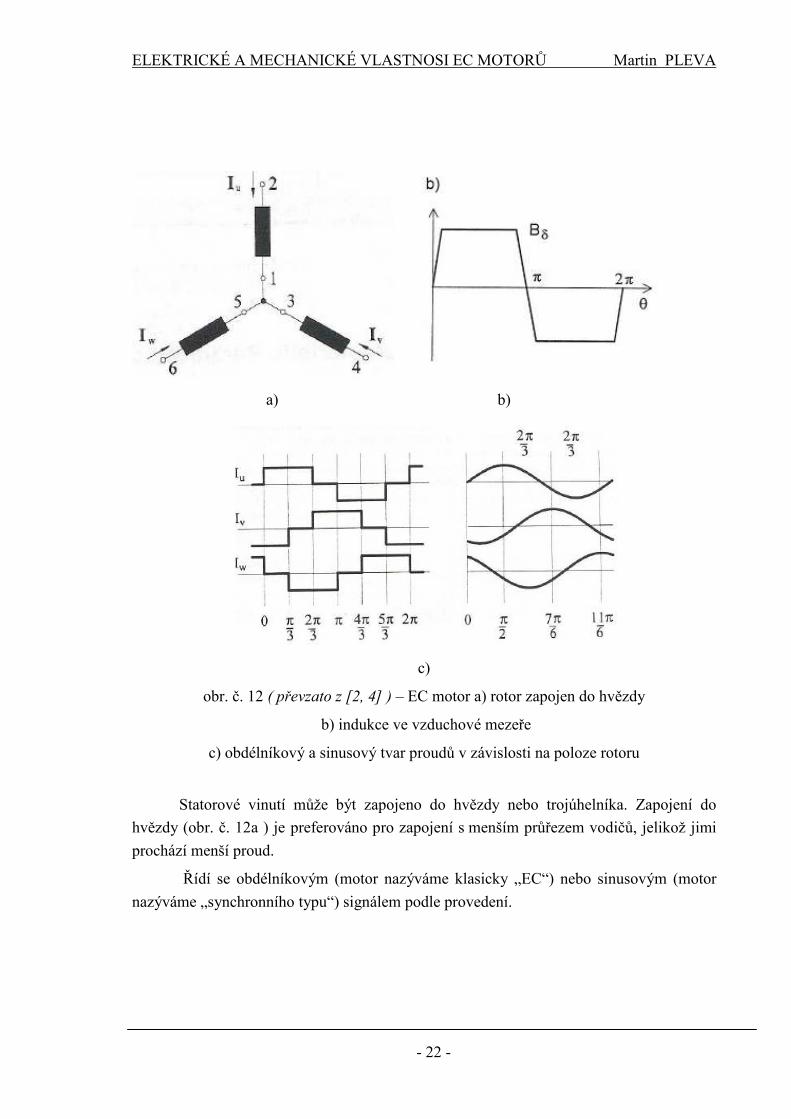
obr. č. 12 ( převzato z [2, 4] ) – EC motor a) rotor zapojen do hvězdy
b) indukce ve vzduchové mezeře
c) obdélníkový a sinusový tvar proudů v závislosti na poloze rotoru
Statorové vinutí může být zapojeno do hvězdy nebo trojúhelníka. Zapojení do
hvězdy (obr. č. 12a ) je preferováno pro zapojení s menším průřezem vodičů, jelikož jimi
prochází menší proud.
Řídí se obdélníkovým (motor nazýváme klasicky „EC“) nebo sinusovým (motor
nazýváme „synchronního typu“) signálem podle provedení.
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 23 -
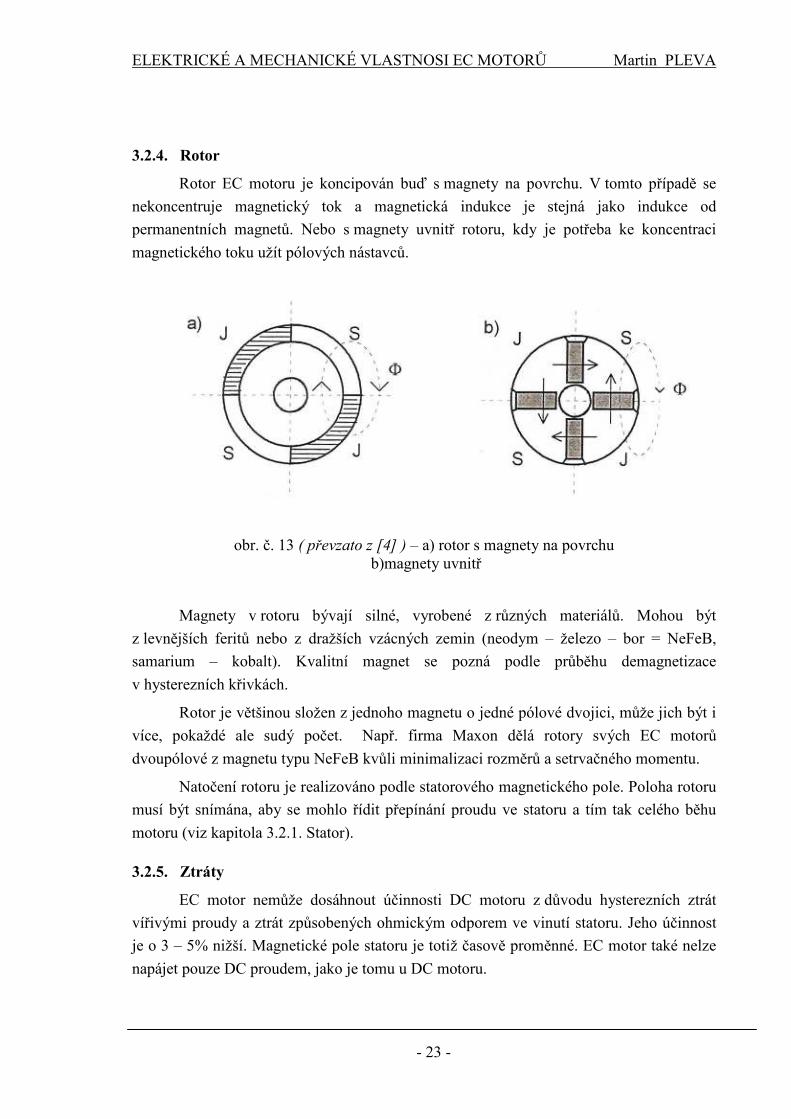
3.2.4. Rotor
Rotor EC motoru je koncipován buď s magnety na povrchu. V tomto případě se
nekoncentruje magnetický tok a magnetická indukce je stejná jako indukce od
permanentních magnetů. Nebo s magnety uvnitř rotoru, kdy je potřeba ke koncentraci
magnetického toku užít pólových nástavců.
obr. č. 13 ( převzato z [4] ) – a) rotor s magnety na povrchu b)magnety uvnitř
Magnety v rotoru bývají silné, vyrobené z různých materiálů. Mohou být
z levnějších feritů nebo z dražších vzácných zemin (neodym – železo – bor = NeFeB,
samarium – kobalt). Kvalitní magnet se pozná podle průběhu demagnetizace
v hysterezních křivkách.
Rotor je většinou složen z jednoho magnetu o jedné pólové dvojici, může jich být i
více, pokaždé ale sudý počet. Např. firma Maxon dělá rotory svých EC motorů
dvoupólové z magnetu typu NeFeB kvůli minimalizaci rozměrů a setrvačného momentu.
Natočení rotoru je realizováno podle statorového magnetického pole. Poloha rotoru
musí být snímána, aby se mohlo řídit přepínání proudu ve statoru a tím tak celého běhu
motoru (viz kapitola 3.2.1. Stator).
3.2.5. Ztráty
EC motor nemůže dosáhnout účinnosti DC motoru z důvodu hysterezních ztrát
vířivými proudy a ztrát způsobených ohmickým odporem ve vinutí statoru. Jeho účinnost
je o 3 – 5% nižší. Magnetické pole statoru je totiž časově proměnné. EC motor také nelze
napájet pouze DC proudem, jako je tomu u DC motoru.
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 24 -
4. ROZDÍLY MEZI AC, DC A EC POHONY
Slovo pohony zahrnuje velké množství využití všech typů motorů. Navíc slovo
pohon není jen samotný motor, součástí je i řízení, napájení a mnoho dalších komponentů,
které jsou nezbytné. Do každé aplikace se však „hodí“ jiný typ motoru. Vše se rozděluje
podle požadavků na napájení, jmenovitém momentu, záběrném momentu, výstupních
otáčkách, výstupním momentu, účinnosti, velikosti ztrát ( chlazení ), výkonu, ceně a na
dalších parametrech, kterých je spousta. ( tato kapitola inspirována [1, 4, 6])
4.1. AC pohony
Jak již bylo řečeno na začátku v kapitole 2, tyto motory se dělí na asynchronní a
synchronní.
4.1.1. Asynchronní pohony
Výhody:
- dobré provozní vlastnosti
- široké výkonové spektrum
- jednoduchá konstrukce (vysoká spolehlivost)
- většinou vyráběny ve velkých sériích => příznivá cena
Nevýhody
- problémy s regulací rychlosti (je nutno používat nákladné a složité
zdroje s proměnným napětím a frekvencí)
Aplikace:
- pohony okružních pil, ventilátorů a dalších různých domácích,
zemědělských i strojírenských aplikací
4.1.2. Synchronní pohony
Výhody:
- může pracovat ve všech čtyřech kvadrantech ( jako motor i brda /
alternátor )
- dají se použít jako polohové servopohony ( nutný přímý měnič
frekvence )
- výkony až do řádů MW
Nevýhody
- problémy s rozběhem na konstantní ( synchronní ) otáčky
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 25 -
Aplikace
- při pohonu systému s konstantními otáčkami
- při dlouhodobém provozu
- pohony čerpadel ( přečerpávací elektrárny ), ventilátorů…
4.2. DC pohony
DC motory jsou lépe popsány v kapitole 2.2.1. Jsou to stejnosměrné komutátorové
motory. Jejich výhody a nevýhody v použití v různých pohonech jsou prezentovány níže.
Výhody:
- malá hmotnost
- konstantní moment v široké škále otáček
- jednoduché řízení napětí v rotorovém vinutí (řízení rychlosti)
- nižší pořizovací cena než EC
- snadná změna smyslu otáčení ( změnou polarity budícího proudu )
- provozní charakteristiky se přizpůsobí poháněnému systému pouze
změnou buzení
- velký rozsah otáček
Nevýhody
- mechanický komutátor, omezení životnosti
- pravidelná údržba komutátoru
- rychlost otáčení je omezena komutátorem
- permanentní magnety na statoru, z toho vyplívá špatná možnost chlazení
rotorového vinutí
Aplikace:
- malé výkony
- automobilový průmysl ( el. okna, zrcátka, polohování
sedadel, vysouvání antény, naklápění světel, atd. )
- aplikace, které jsou napájeny z baterií
- střední a velké výkony
- pohony lodí, ponorek, elektromobilů, městských
trolejbusů
- v některých okrajových oblastech i čerpadla, těžní stroje
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 26 -
4.3. EC pohony
EC motory jsou svými vlastnostmi podobné DC motorům. Mohou se také
přiřazovat k synchronním motorům, jelikož se točí synchronními otáčkami. Z toho
vyplívají některé společné vlastnosti, popsané výše. Všechny níže uvedené výhody a
nevýhody se neustále mění ze stran výrobců, kteří se neustále snaží vylepšovat jejich
motory z hlediska všech parametrů.
Výhody:
- vyšší účinnost než DC motory z důvodu absence mechanického
komutátoru
- větší spolehlivost než DC
- životnost omezena pouze životností ložisek, díky elektronické komutaci
- levnější než synchronní motory
- pouze jeden regulátor proudu ( motor synchronní má 3 )
- rychlost otáčení je omezena pouze momentem setrvačnosti rotoru
Nevýhody
- vyšší pořizovací cena ( nutnost řízení proudů )
- výkon je omezen zahřátím statorového vinutí
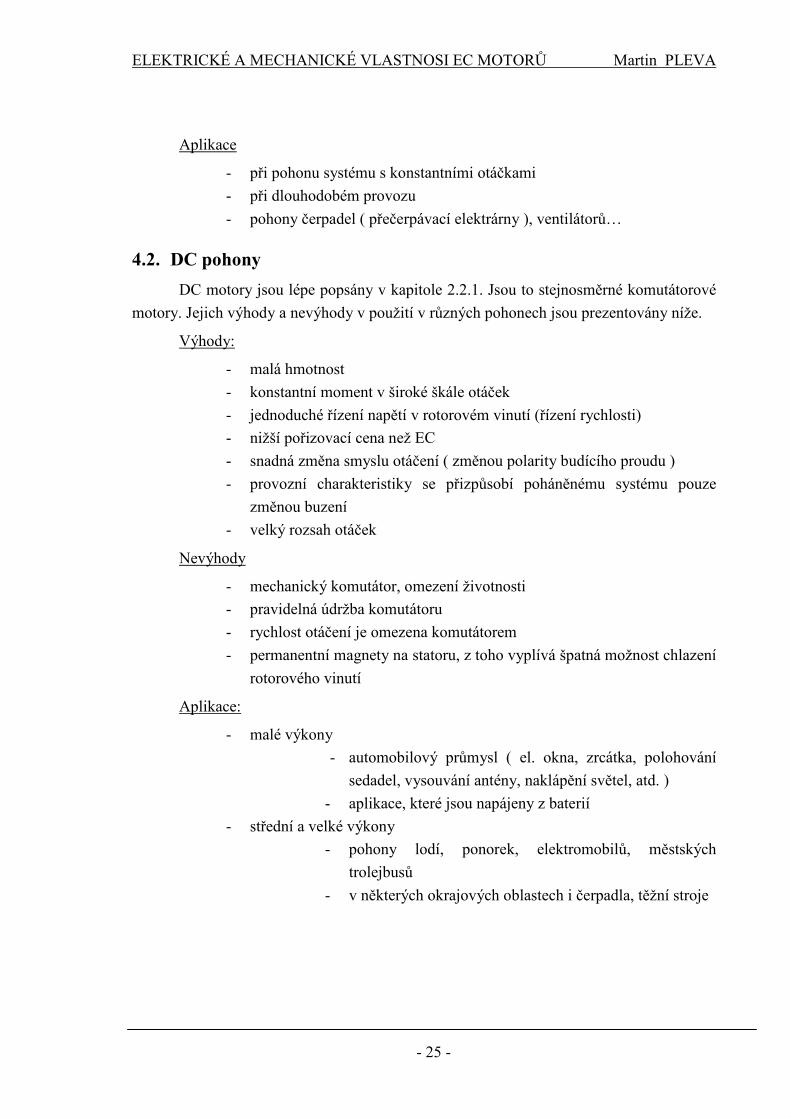
- momentové pulzace při nižších rychlostech ( plynou z obrázku č. 14 )
- malé výstupní momenty => nutnost převodovek
Aplikace:
- robotika v široké škále odvětví ( chirurgie, automatizace, zubařské
nástroje, automobilový průmysl, RC modely), ale i spousta dalších
aplikací podobných jako u DC motorů
obr. č. 14 ( převzato z [2] ) – průběh momentu EC motoru za jednu otáčku
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 27 -
5. ŘÍZENÍ PROUDŮ EC MOTORŮ
Jelikož u EC motorů není mechanický komutátor, je potřeba statorové proudy nějak
řídit. Stejnosměrný motor musí být komutován, jinak by totiž nemohl vůbec fungovat.
Komutace je tedy zajištěna elektronicky (jak už tomu napovídá samotný název motoru EC)
v obvodu, který je součástí motoru. Řízení zajišťuje přepínání proudu do jednotlivých fází
statorového vinutí. K tomu je zapotřebí znát polohu rotoru. To je zajištěno pomocí
snímačů. Nejčastější snímače jsou magnetické, fotoelektrické nebo optické. Snímání
polohy rotoru je realizováno po 60° nebo 120° elektrických. Záleží na typu snímače.
Snímač odešle polohu rotoru do obvodu a obvod přepne směr proudu do následující fáze,
aby se rotor točil dál. Snímače se mohou lišit v různých typech motorů.
Řízení proudů může být provedeno i bez senzorů. Využívá se přitom nepřipojené
třetí fáze motoru ( vždy jsou napájeny jen dvě fáze – obr. č. 17 ), na které lze snímat zpětné
indukované elektromotorické napětí. Když je toto napětí rovno nule, tak se rotor nachází
přesně uprostřed mezi dvěma polohami. ( inspirováno z [9] )
5.1. Hallovy sondy
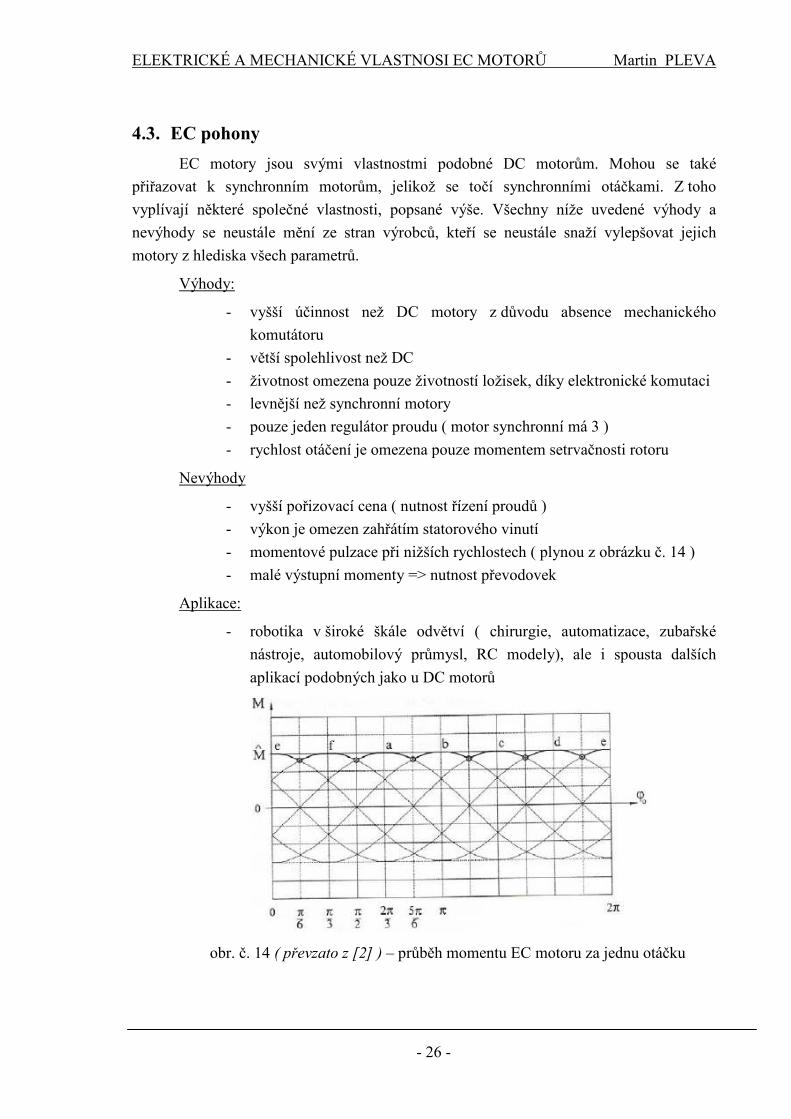
Rotor může být například snímán Hallovými sondami. Hallovy sondy určují
absolutní polohu rotoru. Tyto sondy se využívají v případě jednoduššího a levnějšího
provedení, které je spojeno také s obdélníkovým průběhem proudu. [1] Výhoda těchto
sond je, že při výpadku proudu si elektronika „pamatuje“ pozici rotoru. K nevýhodám
patří nízká rozlišovací schopnost.
obr. č. 15 ( převzato z [6] ) – výstupní signál Hallových sond
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 28 -
Obdélníkový průběh proudu má za následek nerovnoměrný průběh mechanického
momentu. Sinusový průběh proudu odstraňuje kolísání mechanického momentu. V tomto
případě jsou Hallovy sondy ještě doplněny o další snímač, který spolu s logickými obvody
vytváří tento sinusový signál.
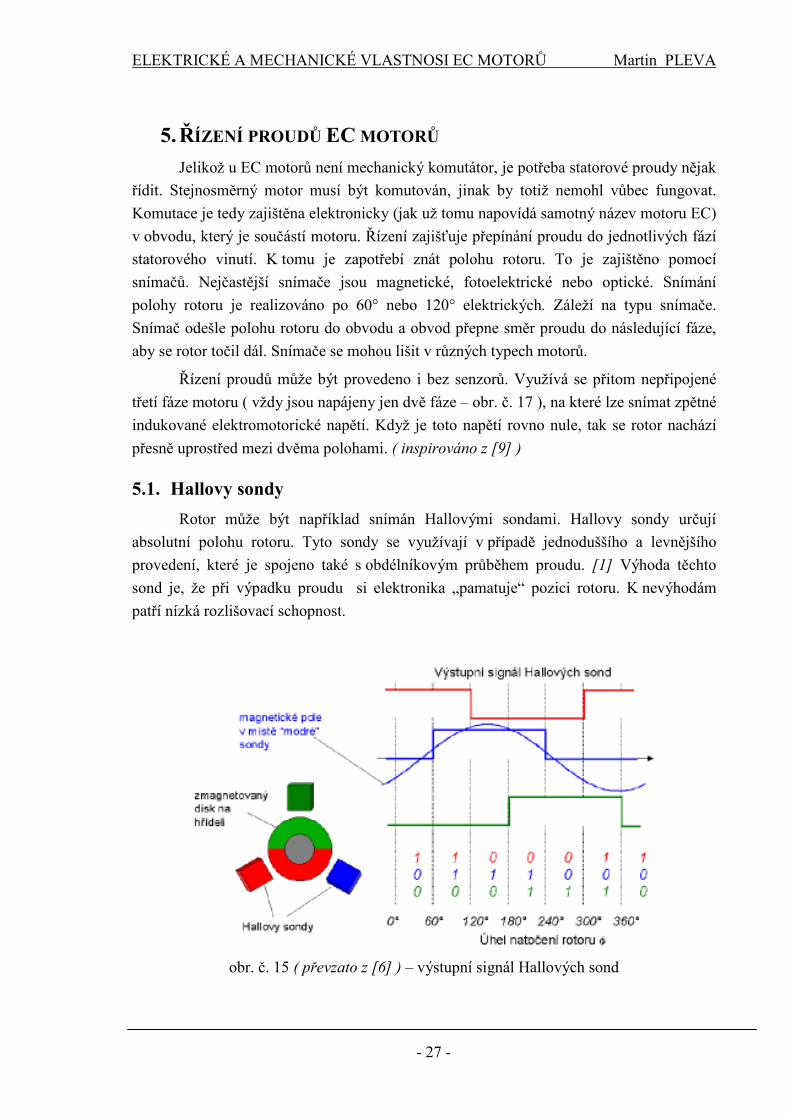
Proudy do jednotlivých fází statoru jsou nejčastěji řízeny zapojením spínacích
tranzistorů (MOSFET) zapojených do tzv. trojnásobného polomostu. Do těchto spínacích
tranzistorů vstupuje signál dle obr. č. 12c. Tento signál je ještě regulován PWM (pulsně
šířková modulace). Jedna fáze je připojena ke kladnému pólu napájení, druhá k zápornému
a třetí napájena není, takže je odpojena.
obr. č. 16 (převzato z [9]) – trojitý polomost se zapojením statoru do trojúhelníka
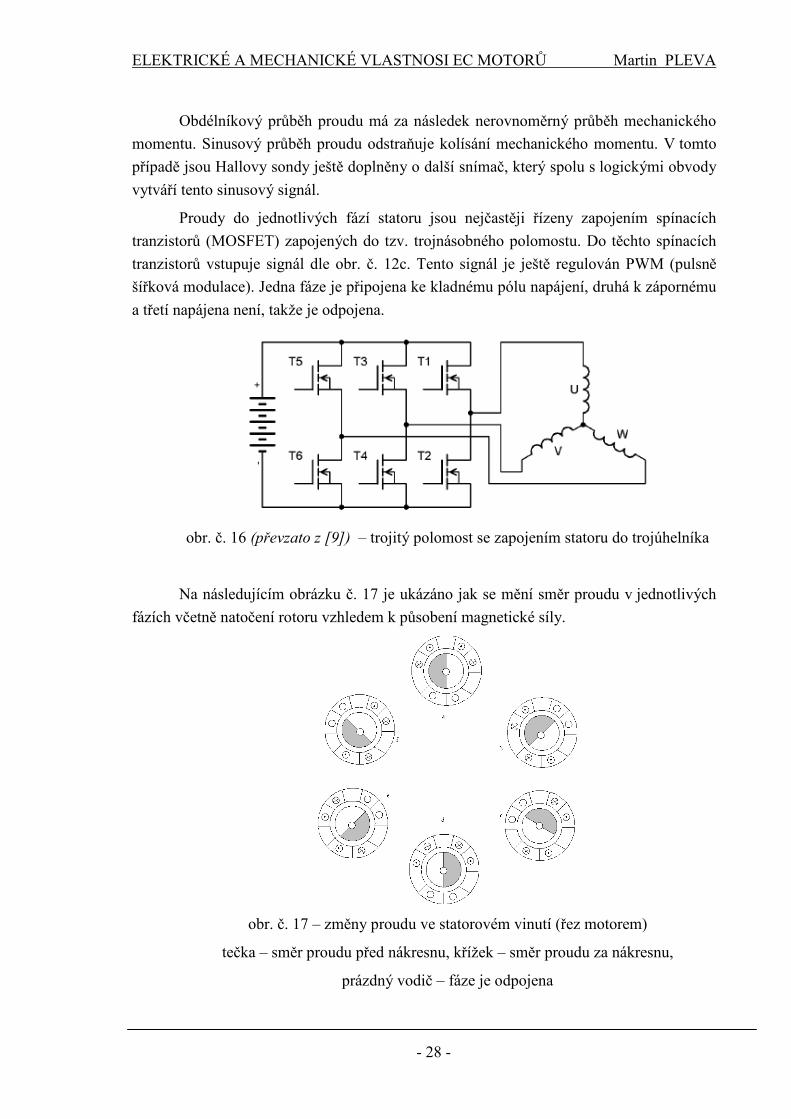
Na následujícím obrázku č. 17 je ukázáno jak se mění směr proudu v jednotlivých
fázích včetně natočení rotoru vzhledem k působení magnetické síly.
obr. č. 17 – změny proudu ve statorovém vinutí (řez motorem)
tečka – směr proudu před nákresnu, křížek – směr proudu za nákresnu,
prázdný vodič – fáze je odpojena
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 29 -
5.2. IRC (Incremental radial senzor)
IRC senzor patří do skupiny rotačních optických senzorů. Tento senzor nemůže
sám o sobě podávat informace o poloze rotoru. Potřebuje k tomu nějaké dekódovací
zařízení. Samotné snímání polohy je realizováno pomocí osvětlování fotodiody, jejíž
výstup je v podobě „0“ a „1“.
Mezi výhody tohoto snímače patří vysoká rozlišovací schopnost polohy a možnost
přesného měření frekvence rotoru. K nevýhodám patří ztráta „paměti“ polohy rotoru při
výpadku proudu.
Všechny optické senzory mají ještě jednu nevýhodu. Jsou náchylné na nečisté
pracovní prostředí. Senzor se zanese a přestává fungovat.
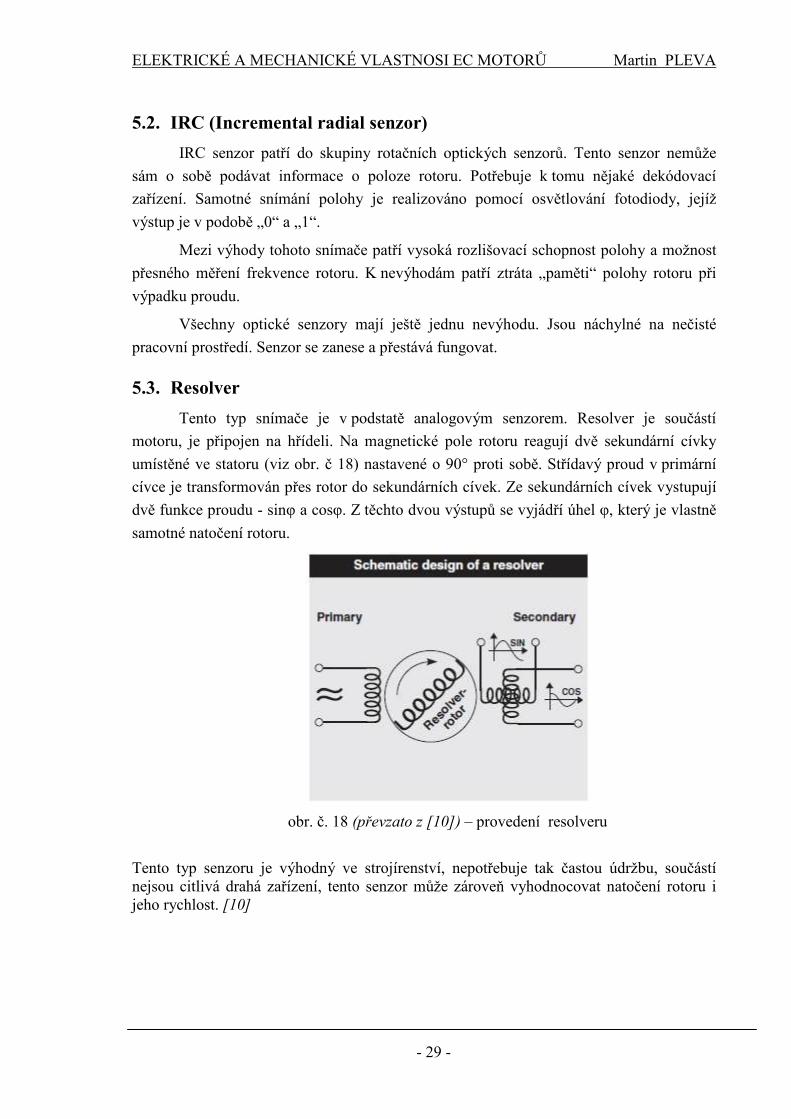
5.3. Resolver
Tento typ snímače je v podstatě analogovým senzorem. Resolver je součástí
motoru, je připojen na hřídeli. Na magnetické pole rotoru reagují dvě sekundární cívky
umístěné ve statoru (viz obr. č 18) nastavené o 90° proti sobě. Střídavý proud v primární
cívce je transformován přes rotor do sekundárních cívek. Ze sekundárních cívek vystupují
dvě funkce proudu - sinφ a cosφ. Z těchto dvou výstupů se vyjádří úhel φ, který je vlastně
samotné natočení rotoru.
obr. č. 18 (převzato z [10]) – provedení resolveru
Tento typ senzoru je výhodný ve strojírenství, nepotřebuje tak častou údržbu, součástí nejsou citlivá drahá zařízení, tento senzor může zároveň vyhodnocovat natočení rotoru i jeho rychlost. [10]

ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 30 -
6. MATEMATICKÉ A ELEKTRICKÉ ROVNICE EC MOTORU
6.1. Pohybové rovnice pro obecný motor
( následující rovnice přejaty z [3] )
Základní rovnice popisující chování rotující soustavy vychází z d’Alambertova
principu.
1
0n
i d
i
M M=
+ =∑
6.1.1
kde Mi jsou hnací a zátěžné momenty a Md je dynamický moment.
Jelikož je rotor uložen v ložiskách, je tedy uložen nepohyblivě do stran, proto
můžeme rovnici ( 6.1.1 ) považovat za algebraickou. Zavedeme moment motoru jako „M“
a moment pracovního mechanismu jako „Mz“. Rovnici ( 6.1.1 ) můžeme tedy přepsat na
tvar:
z dM M M− =
6.1.2
pro Md platí:
( ).d
dM J
dtω=
6.1.3
kde „J“ je moment setrvačnosti a „ω “ je uhlová rychlost soustavy, které mohou být
proměnné podle času „t“ nebo natočení „ϕ “. Můžeme rovnici upravit na tvar:
2d
d dJ d dJ d d dJM J J J
dt dt dt d dt dt d
ω ω ϕ ωω ω ω
ϕ ϕ= + = + = +
6.1.4
většina soustav má moment setrvačnosti konstantní, můžeme rovnici ( 6.1.4 ) přepsat na
tvar:
d
dM J
dt
ω=
6.1.5
Rovnici ( 6.1.5 ) můžeme, za předpokladu konstantního „J“, rozepsat do tří různých tvarů:

ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 31 -
2
2, ,d d
M t Jdt dt
ϕ ϕϕ =
6.1.6
( ),d
M t Jdt
ωω =
6.1.7
( )2
,2
ddM J
dt d
ωϕϕ
ϕ =
6.1.8
( ) ( )2.
2
ddd d d
dt d dt d d
ωω ωω ω ϕϕ ϕ ϕ
= = =
6.1.9
Všechny rovnice ( 6.1.6 – 6.1.8 ) jsou platné a všechny napsány správně. Ale každá
forma je vhodná pro jiné použití. Z rovnice ( 6.1.6 ) je možné vyjádřit okamžitou polohu,
z rovnice ( 6.1.7 ) je možné vyjádřit okamžitou rychlost, z rovnice ( 6.1.8 ) je možné
vyjádřit závislost rychlosti na poloze.
6.2. Elektrické a mechanické rovnice
Když jsou v provozu dvě fáze statorového vinutí zapojeného do hvězdy, můžeme
zavést náhradní schéma:
obr. č. 19 ( převzato z [3]) – náhradní schéma statorového vinutí
Rovnice popisující náhradní schéma:
2 1 2 . 0ph ph phU E E I R− − − =
6.2.1
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 32 -
v libovolném časovém úseku můžeme napsat rovnici ( 6.2.1 ) pro okamžitý stav napětí ve tvaru:
1 2ph ph phE E E= +
6.2.2
pokud známe střední hodnotu indukovaného napětí, v tomto případě můžeme psát rovnici:
2ph
ph
U EI
R
−=
6.2.3
potřebujeme stanovit závislost rychlosti (otáček) „n“ na momentu „M“, n=f(M), musíme
ale nejdříve stanovit závislost indukovaného napětí na otáčkách. Toto provedeme pro
kosočtvercovou smyčku vinutí statoru. Odvození je ale zdlouhavé a nic neříkající, proto
rovnou zavedeme vztah pro otáčky „n“ EC motoru, za použití potřebného vtahu pro
konstantu motoru „ mk “:
m
Mk
I=
6.2.4
2
21
2ph
M M
RUn M
k kπ
= −
6.2.5
z tohoto vtahu ( 6.2.5 ) vyplívá, že je závislost n=f(M) lineární, můžeme tedy tento vztah,
za předpokladu nulového zátěžného momentu a bez ztrát, přepsat do tvaru:
1
2i
M
Un
kπ=
6.2.6
kde in jsou otáčky naprázdno. Pokud budeme chtít znát záběrný moment, zavedeme otáčky
rotoru „ 0n “ = 0:
2iH M
ph
UM k
R=
6.2.7
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 33 -
zároveň ale chceme znát záběrný proud Iz:
2z
ph
UI
R=
6.2.8
Pokud srovnáme a dosadíme do vztahu:
2 2
0.
1 1i
iH H
M c n I
M Iη
+= − = −
6.2.9
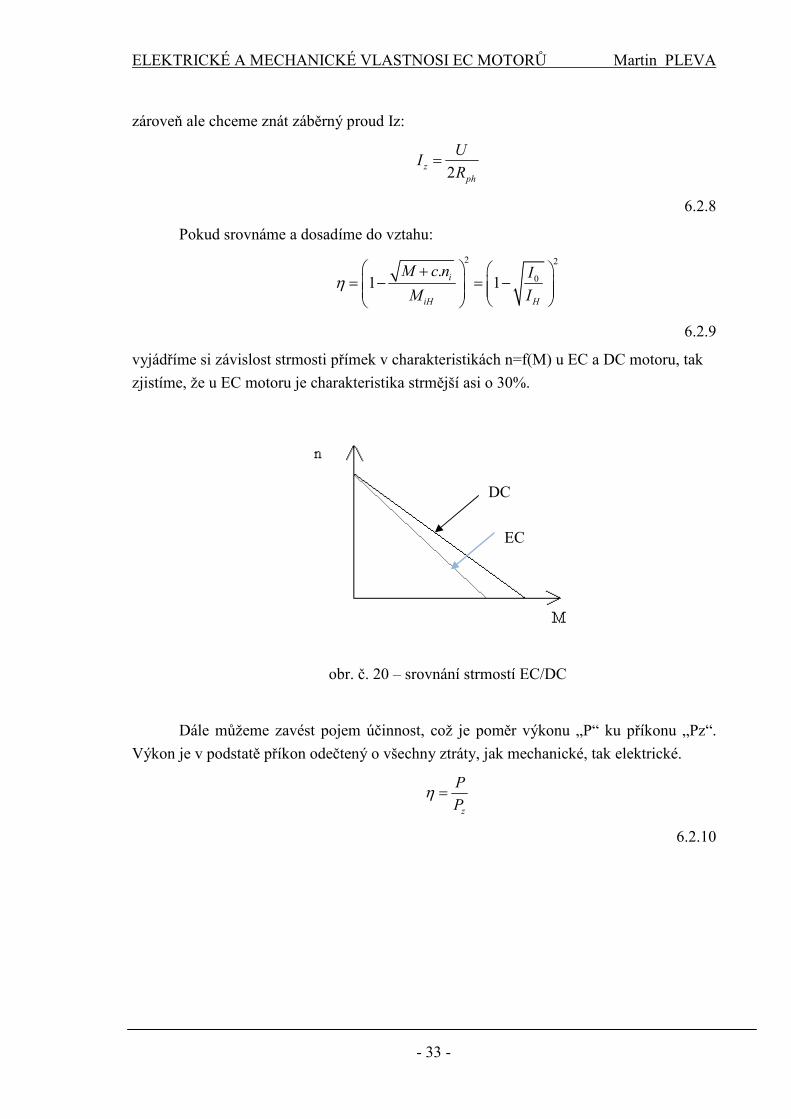
vyjádříme si závislost strmosti přímek v charakteristikách n=f(M) u EC a DC motoru, tak
zjistíme, že u EC motoru je charakteristika strmější asi o 30%.
obr. č. 20 – srovnání strmostí EC/DC
Dále můžeme zavést pojem účinnost, což je poměr výkonu „P“ ku příkonu „Pz“.
Výkon je v podstatě příkon odečtený o všechny ztráty, jak mechanické, tak elektrické.
z
P
Pη =
6.2.10
DC
EC
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 34 -
7. PŘEHLED VYRÁBĚNÝCH EC MOTORŮ NA TRHU
Každá přední firma se zabývá nabídkou všech typů motorů od střídavých
asynchronních až po motory krokové, včetně různých modifikací a doplňků. Pro ukázku
uvádím jen výtah z katalogu firmy Maxon motor. Katalogy všech předních firem na trhu
jsou obsáhlé. Proto zde uvádím odkazy na internetové katalogy a zájemci si mohou
sortiment firem prostudovat dodatečně.
-Katalog firmy Maxon motor AG je k dispozici: http://www.maxonmotor.com/
-Katalog firmy Dunkermotoren je k dispozici na: http://www.dunkermotoren.de/
data/downloads/catalogs/de/90130_BG-katalog_korrigiert.pdf
-Katalog firmy EADmotors je k dispozici na:
http://www.electrocraft.com/files/ead_bldc.pdf
7.1. Maxon motor AG
Maxon motor AG je švýcarský výrobce mikropohonů, se 40letými zkušenostmi na
trhu, který se specializuje jak na samotné motory, tak i na všechna příslušenství, potřebná
k jejich provozu. Jako jsou planetové převodovky, brzdy, řídící jednotky a také různé
senzory. Na internetu tuto firmu najdete na adrese : www.maxonmotor.com , v České
Republice je dealerem firma Uzimex Praha ( www.uzimex.cz ). ( čerpáno z [8] )
7.1.1. Válcové motory Maxon motor AG
Výrobce rozděluje své motory do tří řad:
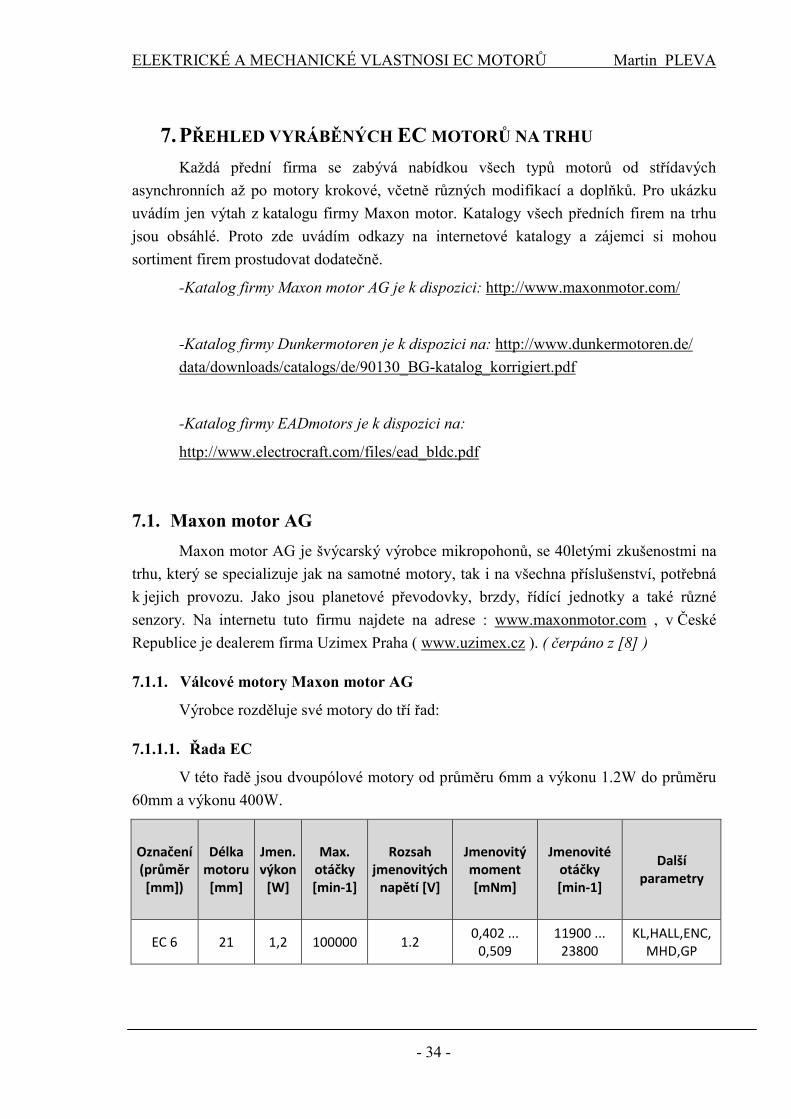
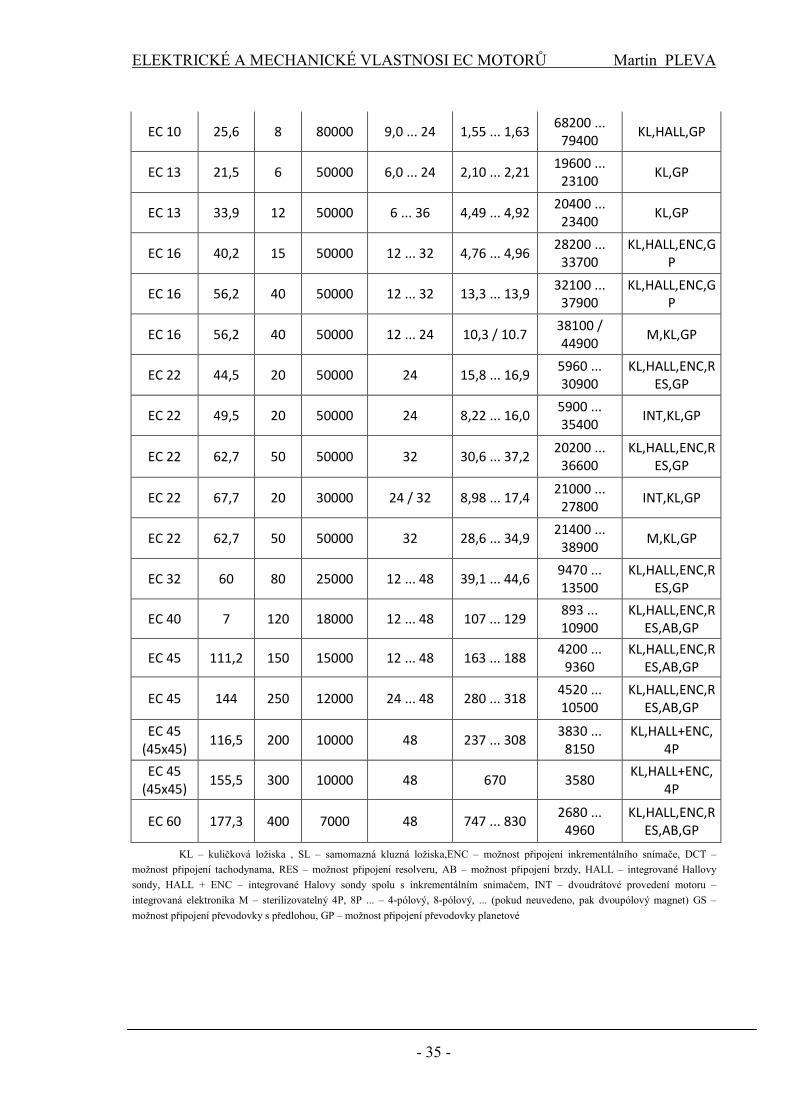
7.1.1.1. Řada EC
V této řadě jsou dvoupólové motory od průměru 6mm a výkonu 1.2W do průměru
60mm a výkonu 400W.
Označení
(průměr
[mm])
Délka
motoru
[mm]
Jmen.
výkon
[W]
Max.
otáčky
[min-1]
Rozsah
jmenovitých
napětí [V]
Jmenovitý
moment
[mNm]
Jmenovité
otáčky
[min-1]
Další
parametry
EC 6 21 1,2 100000 1.2 0,402 ...
0,509
11900 ...
23800
KL,HALL,ENC,
MHD,GP
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 35 -
EC 10 25,6 8 80000 9,0 ... 24 1,55 ... 1,63 68200 ...
79400 KL,HALL,GP
EC 13 21,5 6 50000 6,0 ... 24 2,10 ... 2,21 19600 ...
23100 KL,GP
EC 13 33,9 12 50000 6 ... 36 4,49 ... 4,92 20400 ...
23400 KL,GP
EC 16 40,2 15 50000 12 ... 32 4,76 ... 4,96 28200 ...
33700
KL,HALL,ENC,G
P
EC 16 56,2 40 50000 12 ... 32 13,3 ... 13,9 32100 ...
37900
KL,HALL,ENC,G
P
EC 16 56,2 40 50000 12 ... 24 10,3 / 10.7 38100 /
44900 M,KL,GP
EC 22 44,5 20 50000 24 15,8 ... 16,9 5960 ...
30900
KL,HALL,ENC,R
ES,GP
EC 22 49,5 20 50000 24 8,22 ... 16,0 5900 ...
35400 INT,KL,GP
EC 22 62,7 50 50000 32 30,6 ... 37,2 20200 ...
36600
KL,HALL,ENC,R
ES,GP
EC 22 67,7 20 30000 24 / 32 8,98 ... 17,4 21000 ...
27800 INT,KL,GP
EC 22 62,7 50 50000 32 28,6 ... 34,9 21400 ...
38900 M,KL,GP
EC 32 60 80 25000 12 ... 48 39,1 ... 44,6 9470 ...
13500
KL,HALL,ENC,R
ES,GP
EC 40 7 120 18000 12 ... 48 107 ... 129 893 ...
10900
KL,HALL,ENC,R
ES,AB,GP
EC 45 111,2 150 15000 12 ... 48 163 ... 188 4200 ...
9360
KL,HALL,ENC,R
ES,AB,GP
EC 45 144 250 12000 24 ... 48 280 ... 318 4520 ...
10500
KL,HALL,ENC,R
ES,AB,GP
EC 45
(45x45) 116,5 200 10000 48 237 ... 308
3830 ...
8150
KL,HALL+ENC,
4P
EC 45
(45x45) 155,5 300 10000 48 670 3580
KL,HALL+ENC,
4P
EC 60 177,3 400 7000 48 747 ... 830 2680 ...
4960
KL,HALL,ENC,R
ES,AB,GP
KL – kuličková ložiska , SL – samomazná kluzná ložiska,ENC – možnost připojení inkrementálního snímače, DCT –
možnost připojení tachodynama, RES – možnost připojení resolveru, AB – možnost připojení brzdy, HALL – integrované Hallovy
sondy, HALL + ENC – integrované Halovy sondy spolu s inkrementálním snimačem, INT – dvoudrátové provedení motoru –
integrovaná elektronika M – sterilizovatelný 4P, 8P ... – 4-pólový, 8-pólový, ... (pokud neuvedeno, pak dvoupólový magnet) GS –
možnost připojení převodovky s předlohou, GP – možnost připojení převodovky planetové
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 36 -
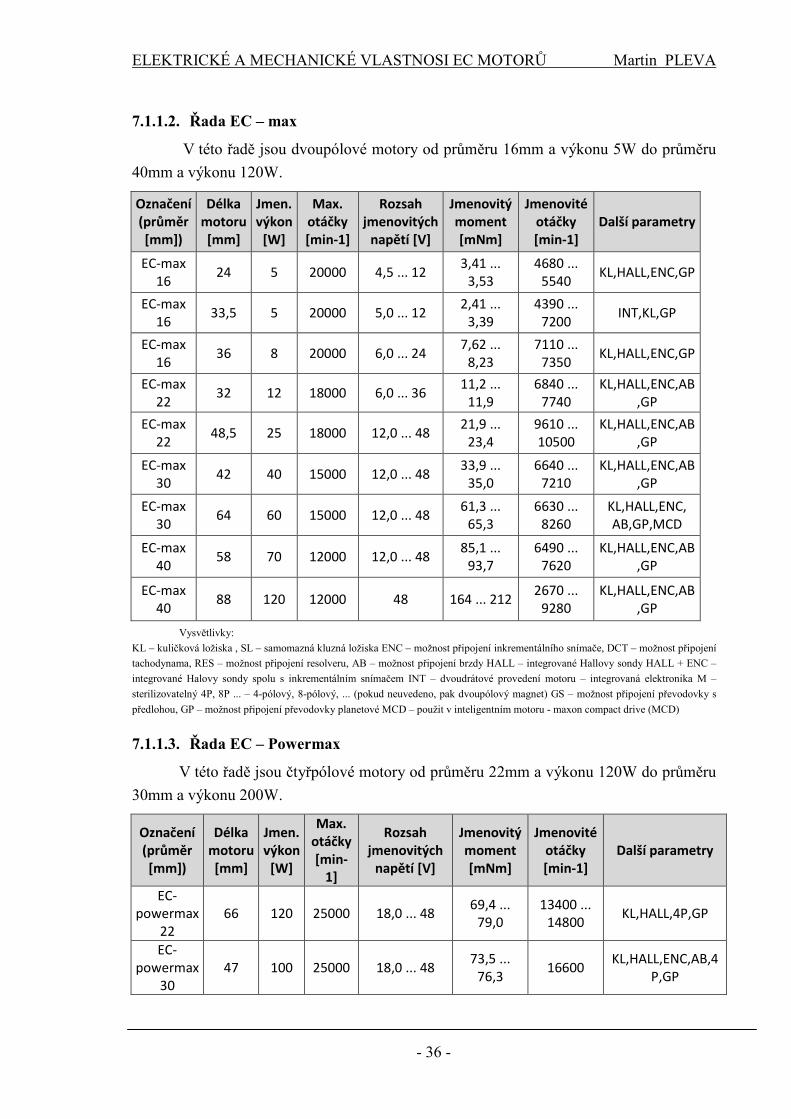
7.1.1.2. Řada EC – max
V této řadě jsou dvoupólové motory od průměru 16mm a výkonu 5W do průměru
40mm a výkonu 120W.
Označení
(průměr
[mm])
Délka
motoru
[mm]
Jmen.
výkon
[W]
Max.
otáčky
[min-1]
Rozsah
jmenovitých
napětí [V]
Jmenovitý
moment
[mNm]
Jmenovité
otáčky
[min-1]
Další parametry
EC-max
16 24 5 20000 4,5 ... 12
3,41 ...
3,53
4680 ...
5540 KL,HALL,ENC,GP
EC-max
16 33,5 5 20000 5,0 ... 12
2,41 ...
3,39
4390 ...
7200 INT,KL,GP
EC-max
16 36 8 20000 6,0 ... 24
7,62 ...
8,23
7110 ...
7350 KL,HALL,ENC,GP
EC-max
22 32 12 18000 6,0 ... 36
11,2 ...
11,9
6840 ...
7740
KL,HALL,ENC,AB
,GP
EC-max
22 48,5 25 18000 12,0 ... 48
21,9 ...
23,4
9610 ...
10500
KL,HALL,ENC,AB
,GP
EC-max
30 42 40 15000 12,0 ... 48
33,9 ...
35,0
6640 ...
7210
KL,HALL,ENC,AB
,GP
EC-max
30 64 60 15000 12,0 ... 48
61,3 ...
65,3
6630 ...
8260
KL,HALL,ENC,
AB,GP,MCD
EC-max
40 58 70 12000 12,0 ... 48
85,1 ...
93,7
6490 ...
7620
KL,HALL,ENC,AB
,GP
EC-max
40 88 120 12000 48 164 ... 212
2670 ...
9280
KL,HALL,ENC,AB
,GP
Vysvětlivky:
KL – kuličková ložiska , SL – samomazná kluzná ložiska ENC – možnost připojení inkrementálního snímače, DCT – možnost připojení
tachodynama, RES – možnost připojení resolveru, AB – možnost připojení brzdy HALL – integrované Hallovy sondy HALL + ENC –
integrované Halovy sondy spolu s inkrementálním snímačem INT – dvoudrátové provedení motoru – integrovaná elektronika M –
sterilizovatelný 4P, 8P ... – 4-pólový, 8-pólový, ... (pokud neuvedeno, pak dvoupólový magnet) GS – možnost připojení převodovky s
předlohou, GP – možnost připojení převodovky planetové MCD – použit v inteligentním motoru - maxon compact drive (MCD)
7.1.1.3. Řada EC – Powermax
V této řadě jsou čtyřpólové motory od průměru 22mm a výkonu 120W do průměru
30mm a výkonu 200W.
Označení
(průměr
[mm])
Délka
motoru
[mm]
Jmen.
výkon
[W]
Max.
otáčky
[min-
1]
Rozsah
jmenovitých
napětí [V]
Jmenovitý
moment
[mNm]
Jmenovité
otáčky
[min-1]
Další parametry
EC-
powermax
22
66 120 25000 18,0 ... 48 69,4 ...
79,0
13400 ...
14800 KL,HALL,4P,GP
EC-
powermax
30
47 100 25000 18,0 ... 48 73,5 ...
76,3 16600
KL,HALL,ENC,AB,4
P,GP
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 37 -
EC-
powermax
30
64 200 25000 24,0 ... 48 114 ... 120 15800 ...
16200
KL,HALL,ENC,AB,4
P,GP
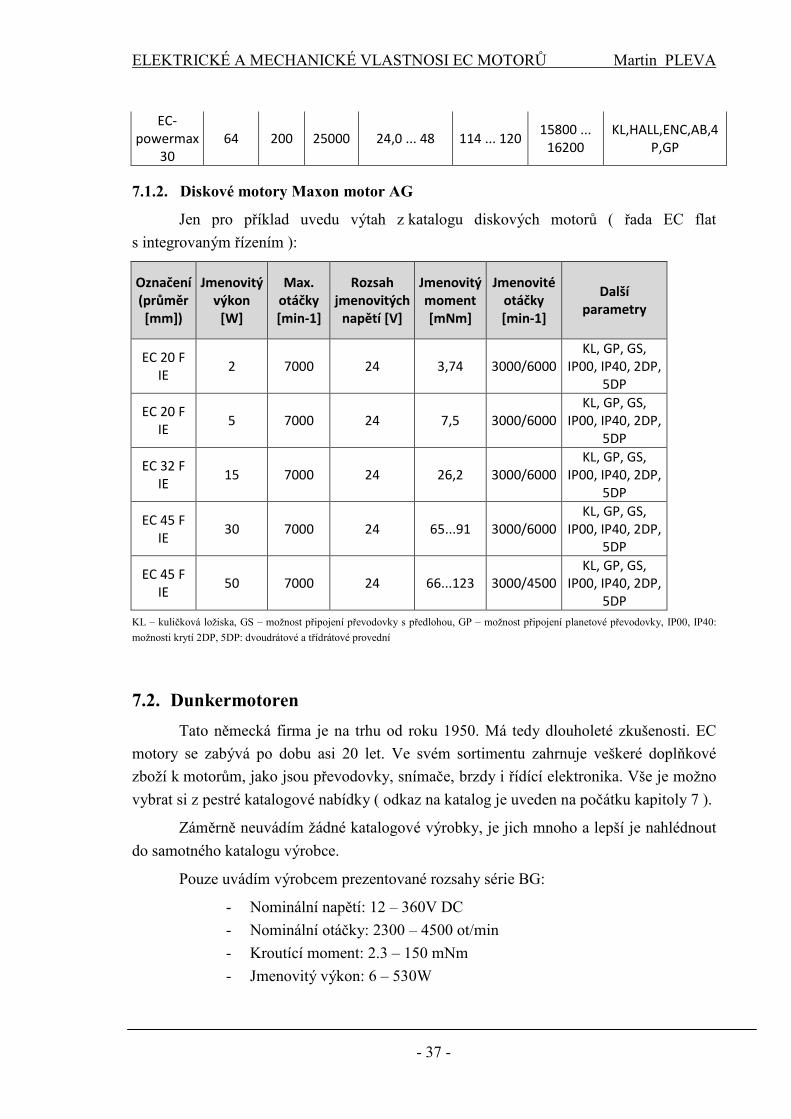
7.1.2. Diskové motory Maxon motor AG
Jen pro příklad uvedu výtah z katalogu diskových motorů ( řada EC flat
s integrovaným řízením ):
Označení
(průměr
[mm])
Jmenovitý
výkon
[W]
Max.
otáčky
[min-1]
Rozsah
jmenovitých
napětí [V]
Jmenovitý
moment
[mNm]
Jmenovité
otáčky
[min-1]
Další
parametry
EC 20 F
IE 2 7000 24 3,74 3000/6000
KL, GP, GS,
IP00, IP40, 2DP,
5DP
EC 20 F
IE 5 7000 24 7,5 3000/6000
KL, GP, GS,
IP00, IP40, 2DP,
5DP
EC 32 F
IE 15 7000 24 26,2 3000/6000
KL, GP, GS,
IP00, IP40, 2DP,
5DP
EC 45 F
IE 30 7000 24 65...91 3000/6000
KL, GP, GS,
IP00, IP40, 2DP,
5DP
EC 45 F
IE 50 7000 24 66...123 3000/4500
KL, GP, GS,
IP00, IP40, 2DP,
5DP
KL – kuličková ložiska, GS – možnost připojení převodovky s předlohou, GP – možnost připojení planetové převodovky, IP00, IP40:
možnosti krytí 2DP, 5DP: dvoudrátové a třídrátové provední
7.2. Dunkermotoren
Tato německá firma je na trhu od roku 1950. Má tedy dlouholeté zkušenosti. EC
motory se zabývá po dobu asi 20 let. Ve svém sortimentu zahrnuje veškeré doplňkové
zboží k motorům, jako jsou převodovky, snímače, brzdy i řídící elektronika. Vše je možno
vybrat si z pestré katalogové nabídky ( odkaz na katalog je uveden na počátku kapitoly 7 ).
Záměrně neuvádím žádné katalogové výrobky, je jich mnoho a lepší je nahlédnout
do samotného katalogu výrobce.
Pouze uvádím výrobcem prezentované rozsahy série BG:
- Nominální napětí: 12 – 360V DC
- Nominální otáčky: 2300 – 4500 ot/min
- Kroutící moment: 2.3 – 150 mNm
- Jmenovitý výkon: 6 – 530W
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 38 -
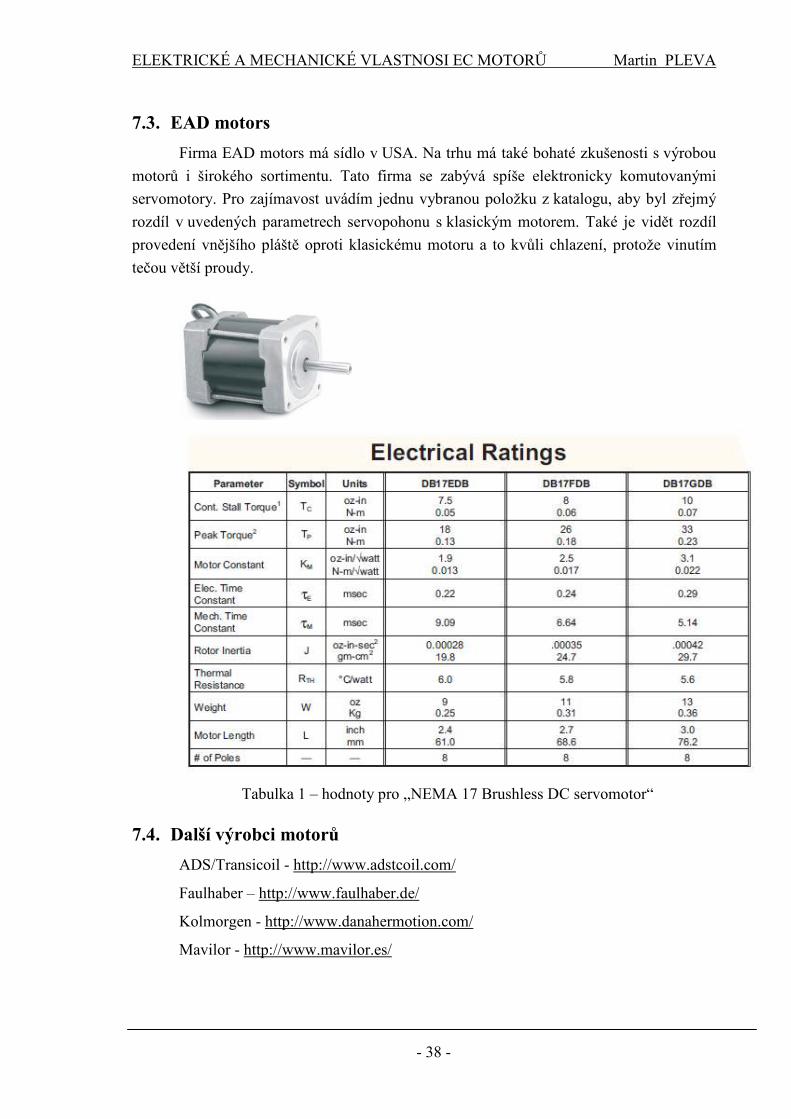
7.3. EAD motors
Firma EAD motors má sídlo v USA. Na trhu má také bohaté zkušenosti s výrobou
motorů i širokého sortimentu. Tato firma se zabývá spíše elektronicky komutovanými
servomotory. Pro zajímavost uvádím jednu vybranou položku z katalogu, aby byl zřejmý
rozdíl v uvedených parametrech servopohonu s klasickým motorem. Také je vidět rozdíl
provedení vnějšího pláště oproti klasickému motoru a to kvůli chlazení, protože vinutím
tečou větší proudy.
Tabulka 1 – hodnoty pro „NEMA 17 Brushless DC servomotor“
7.4. Další výrobci motorů
ADS/Transicoil - http://www.adstcoil.com/
Faulhaber – http://www.faulhaber.de/
Kolmorgen - http://www.danahermotion.com/
Mavilor - http://www.mavilor.es/
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 39 -
8. ZÁVĚR
V této práci jsem nastínil problematiku o elektrických a mechanických vlastnostech
EC motorů. Jsou zde uvedeny základní typy motorů a jejich základní rozdělení do skupin
střídavých a stejnosměrných motorů ( viz kapitola 2 ). V kapitole 2 jsou také znázorněny
charakteristiky těchto typů motoru. Z těchto charakteristik jsou čitelné vlastnosti motorů,
především závislost momentu na hřídeli na otáčkách a jejich výhody a nevýhody, které
jsou podrobněji popsány v kapitole 4. Jak je vidět na obrázcích číslo 5 a 6, je
charakteristika EC a DC motoru hodně podobná, téměř až stejná. U EC motoru má jen více
klesající charakter z důvodu ztrát ( jak už tepelných nebo z důvodu elektronické komutace)
ve statorovém vinutí. EC motor má ale vyšší záběrný moment.
Elektronicky komutovaný motor byl vyvinut z důvodu odstranění nežádoucích
vlivů mechanického komutátoru z DC motorů jako jsou omezení životnosti, nutnost
neustálé údržby a v neposlední řadě omezení otáček. EC motor není těmito vlivy omezen.
Má tedy životnost omezenou pouze životností ložisek a otáčky mohou vyšplhat až ke 100
000 otáček za minutu.
Bylo tedy nutné nahradit mechanickou komutaci elektronickou. Z této skutečnosti
bylo nutné přesunout vinutí z rotoru na stator a permanentní magnety ze statoru do rotoru.
Permanentní magnet na rotoru se tedy natáčí podle magnetického pole statoru a komutace
je realizována pomocí přídavného řízení statorových proudů, které je integrováno do těla
motoru. K řízení statorových proudů jsou zapotřebí čidla snímající polohu rotoru. Tyto
čidla mohou být různá ( řízení proudů – viz kapitola 5 ). Mohou to být Hallovy sondy, IRC
senzory, resolvery nebo další optická i jiná čidla snímající polohu.
Dále jsou v této práci uvedené některé matematické a elektrické rovnice, které
popisují chování motoru. Matematické rovnice jsou uvedeny pouze k momentové
podmínce. Další vztahy silové je možno získat v použité literatuře číslo [2]. Elektrické
rovnice jsou uvedeny k náhradnímu schématu ( obr. č. 19 ), které vychází z napájení dvou
ze tří fází.
Další z uvedených kapitol (7) pojednává o sortimentu nabízeném několika
světovými předními firmami. Jsou zde uvedeny odkazy na několik internetových katalogů
předních výrobců a některé další světové výrobce. Firemní katalogy jsou ale tak obsáhlé,
že provést kvalitní srovnání s ukázkou všech nabízených typů EC motorů by bylo, při
dodržení předepsaného obsahu, nemožné. Proto je zde uvedeno jen pár typů EC motorů od
firmy Maxon. Sortiment dalších firem je možné získat z katalogů. Výrobci se většinou
nespecializují jen na motory, ale i na veškeré doplňkové zboží související s požadovanými
vlastnostmi pohonu. Nabízejí nepřeberné množství řídících jednotek, snímačů polohy nebo
rychlosti, brzdy nebo převodovky, které zajišťují převod malého kroutícího momentu
motoru na větší, potřebný pro pohon soustavy.
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 40 -
EC motory jsou vhodnými pohony všude tam, kde je požadována dlouhodobá
životnost, vysoké otáčky a především miniaturní rozměry. Dalším využitím mohou být
motory krokové, neboli servopohony. Válcové nebo diskové motory jsou využívány dle
požadavků na otáčky, kroutící moment a požadavků na prostorové rozložení.
EC motory se využívají například v chirurgii pro pohony různých chirurgických
zařízení, pohony zubařských vrtaček, v robotice, v automobilovém průmyslu pro pohony
elektrických zrcátek, nastavení světel, oken, polohy sedadel, volantu a mnoho dalších
aplikací v automobilech. Další využití může být například v leteckém průmyslu, pro pohon
klapek, natáčení směrovky, vysouvání podvozku, otevírání dveří a ještě mnoho dalších
využití, nejen v letectví.
Tato práce je tedy zaměřena na elektronicky komutované motory, které
zaznamenávají v poslední době značný růst. Zároveň je prací, která je inspirována
dostupnou literaturou na dané téma a slouží ke stručnému přehledu o dané problematice.
ELEKTRICKÉ A MECHANICKÉ VLASTNOSI EC MOTORŮ Martin PLEVA
- 41 -
9. SEZNAM POUŽITÉ LITERATURY
[1] Čeřovský Z.; Javůrek J.; Pavelka J. Elektrické pohony. 1. vyd. Praha: České vysoké
učení technické v Praze, 1995. 221s. ISBN 80-01-01411-8
[2]Koláčný Josef. Elektrické mikropohony. 1. vyd. Brno: Vysoké učení technické v Brně Fakulta elektrotechniky a komunikačních technologií. 173s.
[3]Koláčný Josef. Elektrické pohony. 1. vyd. Brno: Vysoké učení technické v Brně Fakulta
elektrotechniky a komunikačních technologií. 127s.
[4] Skalický Jiří. Elektrické servopohony. 2. vyd. Brno: Vysoké učení technické v Brně Fakulta elektroniky a informatiky Ústav výkonové elektrotechniky a elektroniky, 2001. Pohony s elektronicky komutovanými motory, s. 49 – 57. ISBN 80-214-1978-4
[5] Huzlik: EC motory, [online]. (březen 2009)
URL: http://jaja.kn.vutbr.cz/~huzlik/EC%20motor.pdf
[6] Kolektiv autorů: Seriál firmy Uzimex, [online]. (duben 2009) URL: http://www.uzimex.cz/download.php?file=/soubory/20070103_maxon_serial.pdf
[7] Kolektiv autorů: Seriál firmy Uzimex, [online]. (duben 2009) URL: http://www.uzimex.cz/soubory/20031203_tat_2003-11_12.pdf
[8] Oficiální internetové stránky firmy Uzimex Praha. [online]. (květen 2009)
http://www.uzimex.cz/
[9]Povalač Aleš: Brushless DC motor controller, [online]. (březen 2009)
URL:http://www.feec.vutbr.cz/EEICT/2008/sbornik/02-Magisterske%20projekty/04-
Silnoprouda%20elektrotechnika%20a%20elektroenergetika/01-xpoval01.pdf
[10]http://www.elektromehanika.com/servo/maxon/Technology%20short%20and%20to%
20the%20point%20sensors.pdf [online]. (duben 2009)
[11]http://www.specamotor.com/ [online]. (květen 2009)





























