Upload
bjoern-bieser
View
94
Download
12
Embed Size (px)
Citation preview
BauanleitungeinesRaumenergieKonvertersnachrealittsnaherBerechnungDFEMBerechnung
vonClausW.Turtur Wolfenbttel,den3.April2011
OstfaliaHochschulefrAngewandteWissenschaften,BraunschweigWolfenbttelSalzdahlumerStrae464838302WolfenbttelGermanyEmail:[email protected].:(+49)5331/93942220
InternetSeite:http://www.ostfalia.de/cms/de/pws/turtur/FundE(verffentlichtinPHILICA.COM,ISSN17513030,Articleno.233)
PACSnumbers:88.05.Ec,88.05.Gh,88.05.Np,88.90.+tZusammenfassungIn[Tur11]wurdedieTheorieeinesleistungsstarkenRaumenergieKonvertersentwickelt,undmitderDynamischen FiniteElementeMethode (DFEM) simuliert. Es ergibt sich eine Maschine, die austheoretischerSichtfrtechnischeAnwendungengeeignetist.AufgrundderVielzahlvonAnfragenzumpraktischenAufbaueinersolchenMaschineimExperiment,hat sich der Autor entschlossen, mit Hilfe seines DFEMRechenverfahrens einen realittsnahenkonkreten RaumenergieMotor auf dem Computer zu simulieren, und diesen mit praktischenErluterungenzumAufbauderAllgemeinheitzurVerfgungzustellen.Die theoretischen Hintergrnde der Berechnung werden eingehend erlutert, so dass jederFachkollege inderLageseinsollte, inden imAnhangdargestelltenAlgorithmuseinegeometrischeAnordnung eines RaumenergieMagnetmotors nach eigenen Vorstellungen einzugeben und zuberechnen.
Inhaltsverzeichnis1.PhysikalischeVorarbeitundGrundlagen2.BewegungenderKomponentendesRaumenergieKonverters3.AuswertungderRechenergebnisseamRaumenergieKonverter4.RechenbeispieleineskonkretenRaumenergieMotors5.EinkonkreterEMDRRaumenergieKonverter6.DerEMDRKonvertermitmechanischerLeistungsentnahme7.PraktischeHinweise,AnleitungzumAufbaueinesEMDRKonverters8.Resume9.LiteraturHinweise10.Anhang:QuellCodedesDFEMAlgorithmus
1.PhysikalischeVorarbeitundGrundlagenDie DFEMBerechnungsmethode, auf der die hier vorliegenden Berechnungen basieren, ist einallgemeinesRechenverfahrenzurBerechnungvonRaumenergieMotorendiesichimspeziellensehrgutdafreignet,elektrischeundmagnetischeRaumenergieKonverterzusimulieren.GezieltfrdieRaumenergieKonverter der letztgenannten Art werden in der hier vorliegenden Arbeit dieGrundlagen, ein Berechnungsverfahren und ein konkretes Beispiel bis hin zur Erstellung einerpraktischen Bauanleitung vorgestellt. Grundlage des DFEMBerechnungsverfahrens ist es, die
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 2 von 67
BewegungdereinzelnenKomponenten(mechanischbewegteKomponentenebenso,wieelektrischeundmagnetischeFelder,diesich im InnerendesRaumenergieMotorsbewegen)auffundamentalephysikalische Gren zurckzufhren, deren Verhalten dann in Differenzialgleichungen simuliertwird.UmdieEinsatzmglichkeitendeshiervorgestelltenRechenverfahrens soallgemeinwiemglichzugestalten,istesvorgesehen,einebeliebigeAnzahlvonSpulenebensowieeinebeliebigeAnzahlvonDauermagnetenzuemulieren.Desweiteren istnatrlichaucheineWechselwirkungmitderAuenwelterforderlich,alleineschon,umdieausRaumenergiegewandelteLeistungentnehmenzuknnen.Dabeiwerdenz.B.SpulenberexterneelektrischeSchaltkreisebeschaltet,diedannebenfallsberDifferentialgleichungensimuliertwerden.DauermagnetenwerdendurchStromverteilungen inStromschleifen emuliert, wodurch die Mglichkeit geschaffen wird, die auf die DauermagnetenwirkendenLorentzkrftesinnvollzuberechnen.Umdiese abstrakteErluterung fr alle Leserund Leserinnen greifbarundbegreifbar zumachen,wurde die Rechenmethode an einem konkreten Beispiel vorgefhrt, welches in einemComputerprogrammumgesetztwurde,dessenQuellencodeimAnhangdervorliegendenPublikationzufindenist.FrdasgenanntekonkreteBeispielsindzweiSpulenundeinDauermagnetvorgesehen,sowiesieinderDarstellungvonAbb.1modelliertsind.Anzumerkenseiabernoch,dasssichmitdenDFEMVerfahrenauchbeliebigeandereRaumenergieKonvertersimulierenlassen,sodassmanauchbereitsbestehendeKonverterausderTheorieherausnachrechnenkann.
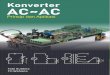
Abb.1:In einem dreidimensionalen kartesischenKoordinatensystem (blaue Farbe) sind zweiSpulenparallelzuryzEbeneangeordnet(roteFarbe). Deren KoordinatenEckpunkte sindebenso in kartesischen Koordinaten angegeben.Ein Dauermagnet wird durch zwei Stromschleifen an dessen oberem und unteremEnde simuliertund steht frdieRotationumdiezAchsezurVerfgung.Die Anzahl und Anordnung der Spulen undMagnete ist im DFEMAlgorithmus freiwhlbar.DashiergezeigteBeispielentsprichtdemQuellcodeimAnhangderPublikation.
UmdieEingaben frdie LsungderDifferentialgleichungeneines solchenSystems frdenDFEMAlgorithmusvorzubereiten,bentigenwir:(a.) eine Berechnung der induzierten Spannung, die der rotierendeDauermagnet in die Spule
einbringt und(b.) eineBerechnungderMagnetkraft,dieaufdenDauermagnetenwirkt.AufdieseWeisewirddieAnkopplungderbeiden Teiledes Systems aneinander realisiert.Dies isteinerseitsdiemechanischeRotationdesDauermagnetenundandererseitsdieelektrischeSchwingung ineinem LCSchwingkreis (siehe [Tur11]), indemdie rot gezeichnete Spuleeingebunden ist.Dabei erfasst die induzierte Spannung, in welcher Weise die mechanische Bewegung in daselektrische System einwirkt, und andererseits dieMagnetkraft, inwelcherWeise die Strme desSchwingkreisesaufdiemechanischeBewegungeinwirken.DiebeidenBerechnungenunterPunkt(a.)undPunkt(b.)wollenwirnunimDetailbetrachten:
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 3 von 67
Zua:DieBerechnungderindenSpuleninduziertenSpannungberuhtaufeinerzeitlichenVernderungdesmagnetischenFlusses ,diedurchBewegung(inunseremBeispieleineRotationumdiezAchse)desoderderDauermagnetenindenSpulenzustandekommt(sieheGleichung(1),[Jac81]).
d = = - N = Windungszahl dtind
B dA U N (1)
ZudieserBerechnungwirddasMagnetfelddes(oderder)DauermagnetenalsVektorfeldberechnetund in einem Array abgespeichert. Im Algorithmus ist dafr das UnterprogrammMagnetfeld_zuweisen verantwortlich,dasmit einerNummer versehenwurde,um verschiedenemglicheDauermagnetenzuemulieren.DasVektorfeldwirdnunstarrandenDauermagneten(bzw.andieDauermagneten)angeoppelt, sodasses sichmitdemMagnetenaufgrunddessenRotationmitdreht. Die Rotation um die zAchse wird dann mit der blichen Drehtransformation nachGleichung 2 realisiert. Darin ist der Drehwinkel gegenber der yAchse, und (x,y) sind dieKoordinatenimungedrehtenBezugssystem,indemderMagnetentlangderyAchseausgerichtetist,wohingegen (x, y)dieKoordinaten im gedrehtenBezugssystem sind, indemderMagnetumdenWinkel gegenber der yAchse gedreht ist. Verantwortlich dafr ist im Algorithmus dasUnterprogrammMagnet_drehen.
cos sin'sin cos'
Matrixmultiplikationx xy y
(2)
AufdieseWeiselsstsichdieFeldstrkeausrechnen,diederDauermagnetanjedembeliebigenOrtim Raum erzeugt, und zwar als Funktion seines Drehwinkels . Verantwortlich dafr ist imAlgorithmusdasUnterprogrammFeldstaerke_am_Ort_suchen.AmEndediesesUnterprogrammswirddermagnetischeFlussdurchdieSpulebestimmt,wobeieineUnterteilungderSpuleinfiniteElemente(mitendlicherAusdehnung)vorhandenist.EinerseitsistderSpulendraht in einzelne Leiterstcke endlicher Lnge unterteilt, andererseits ist auch die SpulenQuerschnittsflche in Flchenstcke endlicher Gre untergliedert. Fr jedes einzelne SpulenFlchenElementbestimmtdasgenannteUnterprogrammdanndenzugehrigenmagnetischenFluss,dessennderungalsFunktionderZeit,unddarausschlielichdieinduzierteSpannunginderSpule.InunseremspeziellenBeispielkommtunsdabeidieTatsachegelegen,dassdieFlchenNormalenVektorendieserSpulenFlchenElemente inRichtungderxAchsezeigen,wasdieBestimmungdesSkalarprodukt des Feldes mit dem FlchenNormalenVektor vereinfacht, wie in Gleichung (3) zusehen(sieistnureinfachdiexKoordinate).
SFE xB dA B dA (3)
Der Fluss durch die gesamte Spule wird einfach als Summe ber den jeweiligen Flu durch alleSpulenFlchenelemente (einer Spule) aufsummiert, so dass sich derGesamtflu durch die SpuleergibtgemGleichung(4).
GES SFE (4)
AnmerkungzudenSpulenFlchenElementen(IndexSFE):UmdieVariationsmglichkeitenderSpulengeometriesoumfangreichwiemglichzugestalten,mussdie Spule als Polygonzug zwischen beliebig vorgebbaren Sttzpunkten modelliert werden. JederPolygonzugdefinierteineFlchemitbeliebigerGestalt,sodassderSpulendrahtausLeiterschleifenElementenvonSttzpunkt zuSttzpunktbesteht.DieSpulenFlchenElemente fllennundievonjedemPolygonzugumrundeteFlcheaus,sodassdermagnetischeFlussdurchdiegesamteSpulealsSumme der finiten magnetischen Flsse durch die einzelnen SpulenFlchenElemente bestimmtwerdenkann.
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 4 von 67
MitderzeitlichenAbleitunggemGleichung(1)istdanndieBerechnungderinduziertenSpannungfertig.DazuwirdnatrlichdieAbhngigkeitdesDrehwinkels vonderZeitbentigt,alsodieWinkelgeschwindigkeit des Magneten zum jeweiligen Zeitpunkt. Wenn wir unsere Rechenmethode miteiner konstanten Winkelgeschwindigkeit kontrollieren, kommen wir zu einem Ergebnis wie z.B.dargestelltinAbb.2.
Abb.2:Zur Verifikation der Rechenmethode wurde ein Magnet, der einhomogenes Magnetfeld erzeugt,mit konstanterWinkelgeschwindigkeit gedreht und die Berechnungder induzierten Spannung in denbeidenSpulendargestellt.DassdieSpannunginbeidenSpulenunterschiedlich ist, liegt an derTatsache,dassdie eine SpuledoppeltsovieleWindungenhatwiedieandere.
Dawir frdie sptereBerechnung desDrehmoments,welches derMagnet aufgrund der Spulenstrme erfhrt (siehe Punkt (b.)), den Dauermagneten durch eine Konfiguration aus Leiternemulierenmssen,istbeikomplizierterenmagnetischenAnordnungen(alsonichteinfachbeieinemsimplenhomogenenMagnetfeld,wieesAbbild2zuGrundeliegt),dieBerechnungdesmagnetischenFlusses von der rumlichen Auflsung der Berechnung (oder der Messung und Emulation) desMagnetfeldes abhngig. Aus diesemGrunde ergibt sich fr denmagnetischen Fluss komplizierterAnordnungenverschiedenerLeitereinnumerischesRauschen,dasnaturgembeimAbleiten,undsomitbeiderBestimmungder induzierten Spannungdrastisch verstrktwird. EinBeispiel fr einsolches Rauschen sehen wir in Abbild 3, bei dem ein Magnetfeld gem dem UnterprogrammMagnetfeld_zuweisen_02zugrunde liegt.NochwesentlichstrkerwirddasnumerischeRauschenspterbeiderEmulationeinesechtenStabmagnetenausfallen.
Abb.3:Whrend der magnetische Fluss beikonstanter Winkelgeschwindigkeitdes rotierenden Magneten eingewisses numerisches Rauschenzeigt, erfordert die Berechnung derinduzierten Spannung einezustzliche (nachtrgliche)numerische Glttung, damit berhaupt ein sinnvoller Wert fr dieWeiterverarbeitung im DFEMAlgorithmus zur Verfgung gestelltwerdenkann.
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 5 von 67
Um das numerische Rauschen des SpannungsSignals zu gltten, wurde eine FourierEntwicklungprogrammiert (imgleichnamigenUnterprogramm),beiderallerdingsgezieltdieKomponentennurbiszueinernichtallzuhohenOrdnung(z.B.biszurfnftenHarmonischen)mitgenommenwurden,umsicherzustellen,dasshochfrequenteAnteilenichtdienumerischeGlttungverringern.Imbrigen erflltdie Entwicklung einer FourierReihediedringendeNotwendigkeitder CPUZeitErsparnis bei der Berechnung des magnetischen Flusses. Da die eigentliche Berechnung desmagnetischen Flusses eine Summe (nach Gleichung 4) ber zeitaufwndige Rechenoperationen(Gleichungen2und3)erfordert, istderenAusfhrungwesentlich langwierigeralsdieBerechnungvonnurfnfSummandeneinerFourierreihemitungeraderFunktionssymmetrienachGleichung(5).In Anbetracht der Tatsache, dass zum Lsen der Differentialgleichung eine sehr feine ZeitDiskritisierungerforderlichseinwird,mitZeitschritten imBereichwenigerNanosekunden,mussdieBerechnungdesmagnetischenFlussesbeijedemLaufdesAlgorithmuseinige108109malausgefhrtwerden,sodasshierdieCPUZeitErsparniseinedurchauswichtigeRollehat.UmdasErgebnisderLsung der Differentialgleichung abzusichern, werden wir die Gre der Zeitschritte sukzessiveverfeinernmssen,sodasseineBeschleunigungderinnerstenRechenschleifen(dazugehrtauchdieBerechnungdesmagnetischenFlusses)vonessenziellerBedeutungist.
01
Nherung mit Fourier-Reihe in 5.Ordnungsin
= Fourier-Koeffizienten
N
GES A t A
(nach[Bro08]) (5)
AufgrunddergeringenAnzahldertatschlicheverwendetenFourierKoeffizienten ( 0 5N ) istdereneinfache und rasche Bestimmung mittels der Gauschen Methode der kleinstenAbweichungsquadrate zwischen derNherungmit FourierReihe und dem eigentlichen Signal einsehrbequemesVerfahrenzurBestimmungderKoeffizienten A .Zub:ZurBerechnungder LorentzKraft,diedie Spulenstrme aufdenDauermagneten ausben,wurdewiebereitserwhnt,eineEmulationdesDauermagnetendurcheinegeeignetwhlbareAnzahlvonStromschleifen vorgesehen. In unserem Demonstrationsbeispiel begngen wir uns mit einemzylindrischen Stabmagneten, da dieser auch fr eine sptere Realisation in einem realen Gerteinfach zubekommen ist.DerEinfachheithalber seihierderStabmagnetdurch zweikreisfrmigeLeiterschleifen an den beiden Enden des zylindrischen Stabes reprsentiert. Das Magnetfeld desStabmagnetenwirdalsoalsMagnetfeldeinesSpulenpaaresemuliert.AlsParameterhierfrbentigtderAlgorithmuslediglichdieLngedesZylinderstabes,dessenDurchmesser,unddasMagnetfeldandenEndendesStabes.LetztereswirdmithilfeeinesfiktivenEmulationsspulenStromssoeingestellt,dassdieEmulationdie tatschlich gemessenen Feldstrken aneinem vorhandenen Stabmagnetenwiedergibt.Das Magnetfeld dieses EmulationsSpulenPaares berechnen wir mithilfe des BiotSavartschenGesetzesfreinenbeliebigenAufpunkt,sowieesinAbbild4dargestelltist.
Abb.4: Veranschaulichung der Geometrie einerLeiterschleife (grn) deren Elemente durch einenOrtsvektor l parametrisiertsind.NachBiotSavartberechnetwirddasMagnetfeld,dasdieseLeiterschleifeaneinembeliebigenAufpunktamOrt s erzeugt.DadiebesagteLeiterschleifedasobereEndeeinesinRichtungderyAchseorientiertenStabmagnetenbildet, liegt sie parallel zur xzEbene, hat den RadiusMEro und befindet sich bei der yKoordinateMEyo.
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 6 von 67
EinebequemeParametrisierungderLeiterschleifekannrealisiertwerdendurchGleichung6.
cos - sin0
sin cos
MEro t MEro tdl t MEyo v t l tdt
MEro t MEro t
(6)
Geben wir den Aufpunktx
y
z
ss s
s
durch dessen kartesische Koordinaten an, so knnen wir mit
Gleichung(7)indasBiotSavartscheGesetzeinsetzen: 1
3
-
24 -
q v l s ddHl s
(7)
DasKreuzproduktimZhlerlautetdort
- cos -
- cos cos - sin sin -
- sin -
y
x z
y
MEro t MEyo s
v l s MEro t MEro t s MEro t MEro t s
MEro t MEyo s
(8)
DamitbestimmenwirdenBetragimNennervonGleichung(7)zu
3
23 22 2- cos - - sin -x y zl s MEro t s MEyo s MEro t s (9)
Damitknnenwirzwar imPrinzipdieAusdrcke(8)und(9) indasKreuzproduktvon(7)einsetzen,aberesfehltunsnochdieLadung 1q in(8).DieseistzubestimmenausdemSpulenstrom I undderLaufgeschwindigkeitderLadung stndig,denndiesebeidenGrenmssenkombiniertwerden,umeinensinnvollenWertfrdieLadungundderenBewegungzuerhalten.DaderStrombekanntlichalsdieproZeiteinheitflieendeLadungzuverstehenist,knnenwirschreiben:
1
1
==
2 2T =
qIT I q
(10)
VondenbeidenGren 1q und knnenwiralsowillkrlichdieEinefestlegenunddieanderedanngeeignetanpassen,sodasssichderrichtigeSpulenstrom I frdieEmulationsspulenergibt.Setzenwir also willkrlich 1 = 1q Ampere an und passen wir dann so an, dass sich der gewnschteSpulenstromeinstellt.DazulsenwirGleichung(10)aufnach :
1
2= Iq (11)
Zur Summierung der infinitesimalen FeldstrkenElemente nach Gleichung (7) knnten wir dasentsprechende Ringintegral ber die Leiterschleife lsen. Da im Algorithmus beliebig geformteLeiterschleifenundStromkonfigurationvorgesehensind,machenwirdiesbereineDiskretisierungmit N finiten FeldstrkeElementen gem Gleichung (12). Ebenso wie in Abb.3 hat dieDiskretisierungauchhiereinnumerischesRauschenisteineFolge.
13
0 0-
-
24 -
N Ni
GESi iLeiter
schleife
q v l sH dH dH
l s
(12)
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 7 von 67
Diese Summierung wurde im Unterprogramm Magnetfeld_zuweisen_03 praktisch umgesetzt,wobeidieSummationsvariable I = 0 ... N dazudient,dasArgumentderParametrisierungbereinePeriodelaufenzulassen,also 2t = 0 ... =T .Die Kontrolle der Ergebnisse anhand der klassischen Formel der Feldstrkeberechnung (sieheGleichung13)entlangderSpulenachse(hierdieyAchse)besttigtdieTauglichkeitdesVerfahrens.
2
322 22
KlassI aHa r
(13)
Damit ist die reine Simulation des Magnetfeldes eines zylinderfrmigen Stabmagneten mit HilfezweierLeiterschleifenandenbeidenEndendesZylinderserfolgreichabgeschlossen.Die Bestimmung des Magnetfelds des Dauermagneten ist aber nicht das Ziel der Berechnung,sondernnureinSchrittaufdemWegdorthin.ZielistletztlichdieBestimmungdesDrehmoments,mitdemdievondenSpulenerzeugtenMagnetfelderdenDauermagnetendrehen.DazumssenwirdieLorentzKraft zu der dem Magnetfeld zugrunde liegenden Stromverteilung in den DauermagnetEmulationsspulenimFeldderuerenSpulenbestimmen(welcheinAbb.1inroterFarbegezeichnetsind).MiteinfachenWorten:WelcheLorentzKraftbtderSpulenstrom inderrotgezeichnetSpuleaufdenDauermagnetenaus?DieseLorentzkraftbildetdanndieGrundlage,ausderdasDrehmomentberechnetwird.DazuverwendenwirabermalsdasBiotSavartscheGesetz,diesmalnun,umdasMagnetfeldderrotgezeichneten Spulen an beliebigenOrten zu entwickeln, und damit eben auch an denOrten, andenen sich die LeiterschleifenElemente befinden, die die Stromverteilung derMagnetEmulationSpulenwiedergeben.Die felderzeugende LeiterschleifenAnordnung istalsoderPolygonzugder rotgezeichneten Spule,derAufpunkt(andessenOrtdasFeldbestimmtwerdensoll) liegtandenOrtenderLeiterschleifenElemente,diedenDauermagnetenemulieren,sowiewirdiesinAbb.5sehen.In Rechenbeispiel (siehe Anhang) knnte im Prinzip zu jeder der beiden Spulen (in rot) je einPolygonzug mit je vier Sttzpunkten verwendet werden. Tatschlich sind aber zwischen denEckpunkten der Rechteckspulen noch weitere Sttzpunkte eingebracht, da diese Sttzpunktegleichzeitig verwendet werden, um die Eckpunkte der SpuleFlchenElemente festzulegen. EineErhhungderZahlderSttzpunkte fhrtalso zueiner feinerenVernetzungderSpulenflchen,diederBerechnungdesmagnetischenFlussesdurchdieSpulenzugrundegelegtwerden(vgl.Glg.4).
Abb.5:Veranschaulichung der Vektoren, fr dieBerechnungdesFeldesderSpulenamOrtdesDauermagneten nach dem BiotSavartschenGesetz.
Leiterschleifen-Elementx
y
z
ss s
s
Aufpunktx
y
z
rr r
r
Ladungsbewegung amLeiterschleifen-Element
x
y
z
dsds ds
ds
BezogenaufdieParameternachAbb.5knnenwirdasBiotSavartscheGesetz formulierengemGleichung(14).
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 8 von 67
3
-
4 -
I ds s rdH
s r
(14)
DasKreuzproduktimZhlerlautetdort
- r - - r- r- - r - r - - r
- r - r - - r
y z z z y yx x x
y y y z x x x z z
z z z x y y y x x
ds s ds sds sds s r ds s ds s ds s
ds s ds s ds s
(15)
WiegewohntsetzenwirdenAusdrucknachGleichung(15)inGleichung(14)einunderhaltensodiefiniten Feldelemente dH , die jedes LeiterschleifenElement der rot gezeichneten Spulen amAufpunkt erzeugt, also an demjenigen Ort der MagnetEmulationsSpulen erzeugt, die denDauermagneten emulieren.Diese Berechnungwird fr jedes einzelne LeiterschleifenElement derDauermagnetEmulationsSpulen einzelnen durchgefhrt, um die LorentzKraft auf jedes einzelnedieserLeiterschleifenElementezubestimmen(gemGleichung(16).
mit den Feldelementen
dF q v dB I l dB
dB dH
(16)
Die finiten LorentzKraftElemente dF werden werden dann benutzt, um finite DrehmomentElemente zu berechnen (siehe Gleichung (16)), die auf die Drehbewegung des Dauermagneteneinwirken.DerenSummationenzumGesamtdrehmomentwirdbereinediskreteSummeausgefhrt(sieheGleichung(17)),denndieDFEMMethodeisteineBerechnungsmethodederfinitenElemente.
finites Drehmoment-Element
Summation zum Gesamt-Drehmoment, Nherung durch diskrete Summeges
dM r dF
M dM
(17)
DurchgefhrtwerdendieBerechnungenimUnterprogrammDrehmoment.Auch hier wird ein numerisches Rauschen des Drehmoments als Funktion des Drehwinkelsfestgestellt,daseineGlttungdurcheineFourierEntwicklungsinnvollerscheinenlt.Wirbegngenuns abermals mit einer nicht all zu hohen Ordnung (z.B. bis zur fnften Harmonischen), umhochfrequenteAnteilesicherauszuschlieen(vgl.Gleichung(5)).Auchhier istwiederdieverbrauchteCPUZeitfrdieBerechnungeineseinzelnenDrehmomentszugro,alsdassmandieDrehmomentsBerechnungzuriterativenLsungderBewegungsDifferentialgleichungallzuoftausfhrenkann.DeshalbistauchhierdieFourierReihemitwenigenSummandeneinprobatesMittelzurCPUZeitErsparnisimHinblickaufdiesptersehrhufigeBenutzungbeideriterativenLsungderDifferentialgleichunginsehrfeinerZeitDiskretisierung.Deshalb werden bei Gleichung (5) ebenso wie bei Gleichung (17) die FourierKoeffizienten derNherungen whrend der Initialisierungsphase des DFEMProgramms bestimmt, um spter imHauptteilderBerechnungen(diesistdieLsungderBewegungsDifferentialgleichungen)aufdiesehrschnelllaufendenFourierNherungenmitwenigenSummandenzurckgreifenzuknnen.DamitsinddiephysikalischenVorarbeitenabgeschlossen.DiessindzweiSchritte:
- die Berechnung der induzierten Spannung, die die Drehung des Dauermagneten in denSpulenerzeugt, und
- dieBerechnungdesDrehmoments,diedieSpulenstrmeinDauermagnetenerzeugen.Die durch FourierReihen schnell gemachten Berechnungen sind in dem im Anhang gezeigtenQuellcodedokumentiertindenUnterprogrammenSchnell_Drehmoment,Fluss_TundFluss_I.
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 9 von 67
WirfassenalsodasErgebnisvonAbschnitt1zusammeninAbb.6undAbb.7,dieexemplarischzuderinAbb.5skizziertenGeometriegehrt.
Abb.6:DermagnetischeFluss,denderDauermagnetnachAbb.5durchdiebeidenrotgezeichnetenSpulen flieen lsst ist abhngig von derOrientierung des Dauermagneten (Drehwinkel).Aufgrund der Symmetrie der Anordnung istdieserFlussdurchdiebeideneingezeichnetenSpulengleichgro.DasblaueSignalgibtdasnumerischeRauschen der Berechnung mit finiten Elementenendlicher Gre wieder. Besonders stark istdas Rauschen in dem Moment, in dem dieWindungen der MagnetEmulationSpulensich sehr nahe an den Spulendrhten derrotenSpulenbefinden.Das violette Signal ist eine Glttung desblauen Signals, die vermittels einerFourierreiheberechnetwurde,dienachdemfnftenSummandenabgebrochenwurde.
Abb.7:Der magnetische Fluss erlaubt vermittelszeitlicher Ableitung eine Berechnung der inden roten Spulen induzierten Spannung. (EswirdallerdingsdieWinkelgeschwindigkeitdesMagnetendafrbentigt.)DieDrehmomentKurvegibtwieder,wiegrodas Drehmoment ist, welches die beidenroten Spulen bei konstantem Strom auf dieDauermagneten ausben. Logischerweise istder Wert des Drehmoments von derOrientierungdesMagnetenabhngig.WertederParameterfrAbb.6undAbb.7:
- Dauermagnet, zylindrisch,4 cmdick,8 cm lang, Feldstrke 1 Tesla amZylinderende.
- RoteSpulen,rechteckig,6cmbreit,12 cm hoch, bei x=2 cm undx=+2cm.
Anmerkung: Wir werden spter auch etwasabweichendeAbmessungenuntersuchen.
Dabeiseiausdrcklichbetont,dassdieZahlderSpulenebensowiedieZahlderDauermagnetenfreiwhlbarist,sodasssichmitdemhiervorgestelltenDFEMAlgorithmusjederbeliebigeRaumenergieKonverteraufmagnetischerBasisberechnenlt:
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 10 von 67
- EmuliertmanzumBeispielmehrereDauermagnetendurchgeeigneteStromverteilungen,sokannmanderenWechselwirkunginanalogerWeisemitdemDFEMAlgorithmusanalysieren.Dies wird interessant zur Berechnung rein magnetischer Selbstlufer, wie man sie zumBeispielfindetin[Hoh11],[Jeb06].
- Emuliert man zum Beispiel mehrere Spulen, die gegebenenfalls auch ber ein Jochmiteinander inVerbindungstehenknnen,umdenmagnetischenFlussingeeigneterWeisezu leiten,so lsstsicheinbewegungsloserRaumenergieKonverterrechnen,wieetwanachderjenigeS.Marinov[Mar8898](oderauchbei[Bea02]).
- EmuliertmanzumBeispieleineSpuleundeinenDauermagneten,so lsstsichderElektroMechanischeDoppelResonanzKonverter(EMDRKonverter)berechnen,denderAutordesvorliegendenArtikelsersonnenhat.[Tur11]
- EmuliertmanzumBeispielzweiSpulenunddazumehrerekleinereDauermagneten,die ingeeigneter Weise zueinander angeordnet sind, um eine spezielle Geometrie desmagnetischenPermanentfeldeszuerreichen,solsstsichderKeppeMotorberechnen.[Kep10]
- OrdnetmanzumBeispiel sechszylindrischeStabmagneten im InnerenvonsechsSpulen ineinemHexagonan,solsstsicheinColerApparatsimulieren.DasVerhaltendieserElementewirddann ineinemgeeignetenDifferentialgleichungSystemsimuliert,diesonstigenSchaltelementegeheninFormvonAnfangsbedingungenindiesesDifferentialgleichungSystemein.(Fr Differentialgleichung: Siehe Abschnitt 2) Vielleicht lsst sich auf dieseWeise endlichklren,obderColerApparatfunktionierenkannodernicht.[Hur40],[Mie84],[Nie83]
- AuchdynamischeEnergiezufuhrundEnergieentnahmebereitetkeinProblem,damaninderBewegungsDifferentialgleichung (siehe Abschnitt 2 der vorliegenden Arbeit) mhelosSpannungsVersorgungen oder Lastwiderstnde in den Spulen einbringen kann, ebensobequem aber auch mechanische Krfte und Drehmomente an den Bewegungen derDauermagneten.Um dies zu veranschaulichen,wird in dem imAnhangwiedergegebenenRechenbeispieleinSpulenpaarnachAbb.5vorgesehen.Die linkederbeidenSpulen,diewiralsInputSpulebezeichnenwollen,kannbereineexterneSpannungversorgtwerden(sieheUnterprogrammU7).Der rechtenderbeidenSpulen,diewiralsTurboSpulebezeichnenwollen, kannber einen Lastwiderstand (RLast) elektrische Leistung entnommenwerden.DerRotationsachsedesDauermagnetenwirdbereineStartDrehzahleinmaligmechanischeEnergie zugefhrt, um den Magnetmotor in Bewegung zu setzen. Da es sich in dem imAnhang gezeigten Rechenbeispiel um einen Selbstlufer handelt, muss diese Energie nureinmaligzugefhrtwerden,umdieDrehbewegungzu initialisieren.DesweiterenkonntedieInputSpule imRechenprogramm auskommentiertwerden,daderRaumenergieMotor alstypischerSelbstluferkeineInputEnergiebentigt.AllerdingsknntemanaufWunschdieseInputSpannungspulsebenutzen,umzumBeispieldieDrehzahldesMotorszusteuernoderzuregeln.
- WeiterhinistimAlgorithmuseinemechanischeLeistungsentnahmevorgesehen.IndieDifferentialgleichung wurde sie als Geschwindigkeitsproportionales Drehmoment eingebracht,wiees zumBeispielbeimanchenReibungsMechanismender Fall sein kann. (WirwerdendiesinAbschnitt6detailliertbesprechen.)
- Um einen RaumenergieKonverter sicher in einem dauerhaft stabilen Betriebszustand zuhalten, isteseinebequemeMethode,dieLeistungsentnahmezusteuernundzuregeln. Indem imAnhangwiedergegebenenDFEMAlgorithmuswird diemechanische LeistungsentnahmeanhandderDrehzahldes rotierendenMagnetengesteuert.DabeiwirdeinZielwertfr die Drehzahl vorgegeben, der mit einer gewissen SchaltHysterese eingehalten wird.bersteigt die Drehzahl eine einstellbare Schwelle, so wird die mechanische Energieentnahmeerhht (umdenRotorabzubremsen);unterschreitetdieDrehzahlhingegeneine
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 11 von 67
andereebenfallseinstellbareSchwelle, sowirddieEnergieentnahmeverringert (damitderRotornichtzustarkabgebremstwird).
DieVielfltigkeitdesDFEMRechenverfahrensistgrogenug,dasssichdieRechenmethodenichtnuraufalleArtenmagnetischerRaumenergieKonverterbeschrnkt, sondern zumBeispielebensogutaufelektrostatischeSystemeangewendetwerdenkann.Manmussdazu lediglichdieLorentzKraftausGleichung(16)durchdieCoulombKraftausGleichung(18)ersetzen.
1 2 1 212 13
0 1 2 2
mit finiten Kraft -Elementen,r -r
die die Ladung Q auf finite4 r -r Ladungselemente dQ ausbt.
Q dQdF
(18)
DieGenauigkeit der Berechnung hngt hauptschlich von der przisen Eingabe der verwendetenmechanischenundelektrischenKomponentenundderenWechselwirkungsFelderab,berdiedieseKomponentenmiteinanderinBeziehungstehen.2.BewegungenderKomponentendesRaumenergieKonvertersDamitsinddiegrundstzlichenVorarbeitenerledigt,undwirknnenunsdereigentlichenLsungderBewegungsGleichungen zuwenden, die die Bewegungen der (mechanischen und elektrischen)KomponentendesRaumenergieKonvertersbeschreiben.DieFunktioneinesjedenRaumenergieKonverterskanndurchdieBewegungenseinerKomponentenbeschriebenwerden.DasprobatephysikalischeMitteldazu istdieAufstellungunddieLsungderentsprechendenBewegungsDifferentialgleichungen.DaeinRaumenergieKonverternatrlichnichtauseinereinzigenKomponentebesteht,sondernausmehreren, die miteinander in Wechselwirkung stehen, handelt es sich dabei grundstzlich umgekoppelteDifferentialgleichungsSystemehhererOrdnung.DieTatsache,dassEnergieabgefhrtwerdenmuss(beimanchenRaumenergieKonvertern,dienichtalsSelbstluferarbeiten,sondernnurals overunity System muss auch Energie zugefhrt werden), erfordert die BercksichtigunggeeigneterStrfunktionen,diedieseWechselwirkungmitderUmweltwiedergeben.DadurchwerdendieDifferentialgleichungsSystemezurBerechnungeinesRaumenergieKonvertersinhomogen.Mathematisch bedeutet dies, dass wir relativ komplizierte inhomogene gekoppelte DifferentialgleichungsSystemehhererOrdnungzulsenhaben,wasnatrlichfrdenbeliebigenAllgemeinfallnichteinfachanalytischmglich ist.DaherbestehtderzentraleRechenkerndesDFEMAlgorithmusaus einem numerischiterativenDifferentialgleichungLser, dessen Beschreibung und ErluterungZielund InhaltvonAbschnitt2dervorliegendenPublikation ist.AufdiesemHintergrundwirdauchklar,warumdieBenutzungdesDFEMAlgorithmusmithhererRechenPrzisioneinegewisseCPUZeiterfordert,undnichtnachwenigenSekundenbereitszueinemErgebnisfhrenkann.Das Verstndnis, sowie das Aufstellen und das Lsen dieses BewegungsDifferentialgleichungsSystems ist der entscheidende zentrale Punkt, den jeder Benutzer des hier prsentierten DFEMAlgorithmusbewltigenmuss,umnachdiesemVerfahreneinenRaumenergieKonverterberechnenzuknnen.BeginnenwiralsonunmitdemAufstellenderDifferentialgleichungen(exemplarischamBeispieldesEMDRKonverters),diedeneigentlichenRechenkerndesDFEMAlgorithmusbedeutenundsomitdieBerechnungdesRaumenergieKonvertersausfhren.DiesgeschiehtinAnalogiezu[Tur11].
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 12 von 67
DaderAlgorithmus vollstndigdynamisch arbeitenmu (unterBercksichtigungderBewegungensowohl der mechanischen Bauteile, als auch der Propagationsgeschwindigkeiten der WechselwirkungsFelder), mssen alle physikalischen Gren auf die Grundgren der schwingendenLadungenbzw.der rotierendenMagneten zurckgefhrtwerden, somitalsoaufdieGrundgren
22, ,d ddt dtq q q q q und auf
22, ,d ddt dt ,wo q die Ladung ist und derDrehwinkel des
Magneten.UmdieZeitschrittebeliebigfeinvorgebenundsteuernzuknnen,wird imUnterschiedzu[Tur11]aufeinevollstndigeAbspeicherungderBerechnungsdaten ineinemDatenArrayverzichtet,damitfrdieFeinheitund frdieAnzahlderZeitschrittekeineSpeicherplatzBegrenzung relevantbleibt.Einzig und allein nur maximal 35.000 Datenpunkte werden fr den DatenExport nach Excelabgespeichert, um eine graphische Darstellung der Ergebnisse zu ermglichen. (Das sollte gutausreichen,dakaumeinBildschirmeinehorizontaleAuflsungvon35.000Pixelnhat.)Werte,wieetwadie Induktivittder zylindrischenSpules (sieheGleichung19)oderdasTrgheitsmoment des rotierenden Magneten als Vollzylinder (siehe Gleichung 20) werden StandardLehrbchernoderFormelsammlungenderPhysikbzw.derIngenieurwissenschaftenentnommen.
2Induktivitt , Windungszahl
SpulenquerschnittsflcheSpulenkrper-Lnge
N AL mit Ns
As
[Ger95]
OdergenauermitKorrekturfrkurzeSpulenlnge:
2
2Induktivitt , Windungszahl
+4
SpulenquerschnittsflcheSpulenkrper-Lnge
N AL mit NAs
As
HerleitungmitHilfe[St07]
(19a)
(19b)
2
2 2 Trgheitsmoment eines Vollzylinders bei+ +Rotation um die quer zur Lngsachse stehende Symmetrieachse4 3y a i
m hJ r r
[Dub90] (20)DamitergibtsichdieMglichkeit,z.B.denAufbauvonAbb.8zusimulieren.
Abb.8:Dies ist die Anordnung eines RaumenergieKonverters,wieermitdemAnhanggezeigtenDFEMDifferentialgleichungsystem simuliertwerdenkann.ZweiSpulensindinroterFarbeeingezeichnet,einrotierenderDauermagnetinschwarz,einemgliche InputSpannung in blau und einKondensatoringrn.
Da der RaumenergieKonverter unseres konkreten Rechenbeispiels erwartungsgem als Selbstluferbetriebenwerdenkann,wurdeaufeinAnlegeneinerInputSpannungvollstndigverzichtet,sodass die linke Spule zwar zur Veranschaulichung fr die Leser und Leserinnen der Publikationmitmoduliert wurden, aber fr die praktische Benutzung unserer Berechnungen nicht bentigtwurde, und daher mitsamt der Spannungsquelle im Programm auskommentiert wurde, an derBerechnungalsonichtteilnimmt.DaheristderbentigtePlatzvorhanden,umdierechteSpuleindie
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 13 von 67
Mitte des Dauermagneten zu schieben, so dass die auf den nachfolgenden Seiten berichtetenRechenergebnisse(sieheAbschnitt3)aufeineAnordnunggemAbb.9zurckgehen.
Abb.9:Dieser Konverter gengt bereits fr eineleistungsstarkeWandlungvonRaumenergie.DessenDifferentialgleichungsystemwurde imhier prsentierten DFEMAlgorithmus aufgestelltundgelst,sodasichdieinAbschnitt3dargestellen Ergebnisse auf diese Variantebeziehen.
ZumAufstellendesDifferentialgleichungsSystemsgehenwirwiederinhnlicherWeisevor,wiewirdiesbereitsaus[Tur11]kennen:(a.)DieDifferentialgleichungeinerharmonischenSchwingungimelektrischenSchwingkreissehenwirinGleichung(21)zuVorbereitungsZwcken.
1 1- + 0L Q Q Q QC LC
(21)(b.)DieDifferentialgleichungeinergedmpftenelektrischenSchwingungsehenwirinGleichung(22).
1- + RQ Q QLC L
(22)IhrenumerischiterativeLsungwurdenachGleichung (23) inAnalogiezu [Tur11]ausgefhrt,einTestErgebnissiehtmaninAbb.10zuKontrollZwecken.
-1 -1+ -i i i iRQ Q Q t Q tL
(23)
Abb.10:Verifikationstest einer gedmpften Schwingung im elektrischen LCSchwingkreis zurberprfung der Differentialgleichung (22)undderLsung(23).
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 14 von 67
(c.)Im Gegensatz zum elektrischen Schwingkreis gibt es in der mechanischen Bewegung keineRckstellkraft, sondernnureineRotation (desDauermagneten).Zubercksichtigen sindalso zweiBeitrgezumhierauftretendenDrehmoment M .DereineBeitragkommtdurchdieEinwirkungderSpuleaufdenMagnetenzustande,dadieSpulenstrmeihrerseitsMagnetfelderverursachen,diemitdem rotierendenDauermagneten inWechselwirkungstehen.DerandereBeitragkommtdurchdiemechanischeLeistungsEntnahmezustande,diewirinunseremRechenbeispielspteralsGeschwindigkeitsproportional voraussetzen wollen. Den erstgenannten Beitrag kennen wir bereits ausAbschnitt1.DenalsZweitesgenanntenBeitragbetrachtenwir imDetailweiterunten,nmlich inAbschnitt6.DamitwirddieDifferentialgleichungdesmechanischenAnteilsdesSystemszueinerrelativsimpelenIntegration gem Gleichungen (24). Dabei enthltGleichung (24a) zugleich die Einkopplung deselektrischenSystemAnteilsindasmechanischeSystem.
0
0
Integrationsschritt Integrationskonstante
Integrationss
+ -t
t
M tt mit M t Drehmoment und J Tr gheitsmoment
J
t d numerische Iteration t t dt t dt
t d numerische Iteration t t dt
chritt Integrationskonstante
+ -t dt
(24a)
(24b)
(24c)
(d.)Wasnoch indieDifferentialgleichungdeselektrischenSystemsaufgenommenwerdenmuss, istdieEinkopplungdesmechanischen SystemAnteils indaselektrische System.Dies ist vorzunehmen inForm der induzierten Spannung, die die Rotation desDauermagneten in die Spule einbringt.Diedaraus resultierende Erweiterung derDifferentialgleichung des elektrischen Systems sehenwir inGleichung(25),diesichausGleichung(22)durchErgnzungdeserwhntenTermsfrdieinduzierteSpannungergibt.
1- + - indURQ Q QLC L L
(25)(e.) Damit lsst sich die numerischiterative Lsung des elektrischen Anteils des Differentialgleichungsystems zurckfhren auf die Integrationsschritte gem Gleichung (26), brigens inAnalogiezu[Tur11].
Spule und Kondensator
- Integration Integrationkonstante
-
Ohmscher InduzierteSpannungWiderstand
1- + -
- -
ind
t
t tt
t t
URQ t Q QLC L L
Q t Q d numerische Iteration Q t Q t dt Q t dt
Q t Q d
Integration Integrationkonstante
+ -numerische Iteration Q t Q t dt Q t dt
(26a)
(26b)
(26c)
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 15 von 67
Damitwird imHauptprogrammdesDFEMAlgorithmusdieBewegungdesRaumenergieKonvertersberechnet, und zwar einerseits die Bewegung seiner elektrischen Ladungen und andererseits dieBewegungderinihmenthaltenenbeweglichenMagneten.AllgemeineAnmerkung:Fr die Berechnungen drfen natrlich nur solche Formeln und solche physikalischen Grenverwendetwerden,diederForderungnacheinerechtenDynamikgengen.EingemittelterStrom,der sich zum Beispiel an Effektivwerten orientiert, oder der sich auf eine bestimmte Signalformbezieht, istdadieserStellevlligungeeignet.AlldiejenigenLeserundLeserinnendesvorliegendenArtikels,diegernedenDFEMAlgorithmusan ihreeigenenApparaturenundExperimenteanpassenmchten,mssenhieraufgewissenhaftaufpassen.GrundstzlichephilosophischeAnmerkungzurAusbreitungundzurendlichenPropagationsgeschwindigkeitderFelderimelektrischenSchwingkreis:Bei einem elektrischen Schwingkreis (wie zum Bsp. in Abb.9 zu sehen) tritt eine elektrischeSchwingung in einer Spule und einen Kondensator auf. Die Frage ist nur, welche physikalischenEntittendortschwingen?SindesLadungen,dieimelektrischenSchwingkreishinundherlaufen?Dies ist mit Sicherheit nicht der Fall. Man kann dies sehr einfach einsehen, wenn man dieBetrachtungdesSchwingkreiseszudemjenigenZeitpunktbeginnt,zudemdieSpulestromfreiist.IndiesemAugenblick istnmlichderKondensatormaximalgeladen,sodassdiegesamteEnergiedesSchwingkreisesalselektrostatischeFeldenergie zwischendenKondensatorplatten zuverstehen ist.NunentldtsichderKondensator,sodassdieelektrischenFelder(undSpannungen)durchdenDrahtderSpule laufen.VonderpositivgeladenenPlatte lufteinFeldzurnegativgeladenenPlatte,undumgekehrt luft vondernegativ geladenen Platte ein Feld zurpositiv geladenen Platte. Ladungstrger (wie zumBeispielElektronen)knnenesnicht sein,diedavonderpositiven zurnegativenPlatte (und umgekehrt) laufen, denn einerseits knnen diese Ladungstrger nichtmit der Propagationsgeschwindigkeit 1v
LC laufen,undandererseitswrdensichdieseLadungstrger,sobald
siesich inderSpulenmitte treffen,gegenseitigkompensieren.WrdenpositiveLadungstrger (wiezumBeispielElektronenlcher/Elektronenmangel)vonderpositivgeladenenKondensatorplattezurnegativ geladenen Kondensatorplatte laufen wollen und gleichzeitig negative Ladungstrger (wiezum Beispiel Elektronen) den umgekehrtenWegwhlen, sowrden sich die Beiden in der Spuletreffen und gegenseitig auslschen.Die Elektronenwrdenmit den Lchern rekombinieren (denElektronenmangelausgleichen),undsowrenachbereitseinerviertelPeriodedieSchwingungdesLCSchwingkreisesvollstndigbeendet.SindesFelder,dieimelektrischenSchwingkreishinundherlaufen?Ja,dies istderFall.Esgehrt zuden typischenEigenschaftenderFelder (ebensowiederWellen)ungestrt zu superponieren, d.h. sie berlagern und durchdringen sich, ohne einander zubeeinflussen.EinFeld luft (inFormeinesWellenberges) indieeineRichtung,wennesdiepositivgeladeneKondensatorplatteverlsst,einanderesFeldluft(ebenfallsinFormeinesWellenberges)in
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 16 von 67
dieentgegengesetzteRichtung,wennesdienegativeKondensatorplatteverlsst.DurchlaufenbeidedieSpule,sotunsiedies,ohnesichgegenseitigzustrenoderzubeeinflussen.DeshalbknnensiedertypischenPropagationsgeschwindigkeit 1v
LC vonFeldern inelektrischenLeitungenfolgen.
AufgrundderungestrtenSuperpositionerreichendieFeldernacheinerhalbenSchwingungsperiodedie jeweils gegenberliegende Kondensatorplatte, so dass im Laufe einer halben Schwingungsperiode die positiv geladene Kondensatorplatte negativ geladen wird, und die negativ geladeneKondensatorplattepositiv.DieVerschiebungderLadungstrger,diedieseFelderimLeiterverursachenexistiert,abersieistnurziemlichgering.Wirknnendiessehrgutverstehen,wennwirdasakustischeAnalogonbetrachten.LuftSchalldurcheinRohr(dieeindimensionaleSichtweisedientderVeranschaulichung),kannvondereinenSeiteeinberdruckundgleichzeitigvondergegenberliegendenSeiteeinUnterdruck(alseinmaligerWellenberg bzw. einmaligesWellental) losgeschicktwerden, diewar alsDruckfeld betrachten,wiees inderAkustikdurchausblich ist(sieheKontinuittsgleichungundEulergleichung).DiebeidenDruckfelderdurchdringensichaufgrundderungestrtenSuperposition,ohnesichgegenseitigauszulschen.DieGasatomederLuftimInnerendesRohresfllendabeikleine(finite)gedachte Volmenelemente, die vom Druckfeld ein wenig bewegt werden, aber nicht sehr viel bewegtwerden.WollenwirdieSituationaufdenDrahtderSpulebertragen, sokorrespondierendie freibeweglichenVolumenelemente (welche Elektronen enthalten) imDrahtmit den frei beweglichenVolumenelementenderLuft(welcheGasatomeenthalten).DieLuftatomebewegensichsehrschnell,ebenso wie die Elektronen im Draht. Betrachtet man aber Finite (kleine) Volumenelemente, dieElektronenbzw.Luftatomeenthalten,sobewegensichdiesemiteinerrechtmoderatenGeschwindigkeit, die wir im Falle der Elektronen als Driftgeschwindigkeit bezeichnet, und im Falle derAkustikalsSchallschnelle.ndernwirnunaneinerStelledieelektrischeFeldstrkebzw.denDruck(die FeldstrkedesDruckfeldes), so verursachtdies eineWelle,die sichmitder typischenPropagationsgeschwindigkeitderFelderundWellenausbreitet,diewirinderAkustikalsSchallgeschwindigkeitbezeichnenundinderElektrikalsSignalLaufgeschwindigkeit 1v
LC .
DieseSignalLaufgeschwindigkeit istes,diedieAusbreitungsgeschwindigkeitderFelderundWellenimSpulendrahtunseresLCSchwingkreisesausmacht.Somit istesalsotatschlichdiePropagationsgeschwindigkeitderWechselwirkungsfelder,diewirberdie InduktivittLunddieKapazittCdesSchwingkreises steuern.UnddiesePropagationsgeschwindigkeitderWechselwirkungsfelder istes,diefrdieKonversionvonRaumenergieverantwortlichist,sowiediesin[Tur10a]und[Tur10b]erlutertwurde.DieseErklrungdientdazu,denLesernundLeserinnenverstndlichzumachen,dassdiehiergezeigteArbeit mit einem LCSchwingkreis, tatschlich auf die Propagationsgeschwindigkeit der Felderzurckgeht (die die Wechselwirkung vermitteln). Somit wird die hier entwickelte Maschine alsotatschlichaufdiebisherdargestelltenGrundlagenderRaumenergieKonversionzurckgefhrt.3.AuswertungderRechenergebnisseamRaumenergieKonverterEine allererste Beurteilung des Verhaltens des Systemswird interaktiv,whrend des Ablaufs desProgramms,aufdemBildschirmangezeigt.DieDaten,diemandabeiimProgrammsieht,sindinTab.1wiedergegeben.DiessinderstewichtigeGrenzurBegutachtungdesRaumenergieKonverters.
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 17 von 67
PhysikalischeGre Erluterung,max
, ,maxI
cap II
qU
C MaximumderSpannungamInputKondensator
,max, ,max
Tcap T
T
qU
C MaximumderSpannungimTurboKondensator
,maxIq MaximumdesStromsinderInputSpule,maxTq MaximumdesStromsinderTurboSpule
,maxI IL q MaximumderSpannungberderInputSpule,maxT TL q MaximumderSpannungberderTurboSpule
max MaximumderWinkelgeschwindigkeitdesMagneten(inrad/sec)max2 MaximumderWinkelgeschwindigkeitdesMagneten
0Anf gesE E t AnfangsEnergieimSystem End gesE E t Ende EndEnergieimSystem
-End AnfE E EnergieZunahmeimSystem-End Anfges
E ET LeistungsAenderungimSystem
2gesT
ent Last To
P R q dt AmLastwiderstandentnommeneGesamtenergieent
ges
PT AmLastwiderstandentnommenemittlereentnommeneLeistung
gesT
in I ino
E q U dt UeberInputSpannungzugefuehrteGesamtEnergiein
ges
ET UeberInputSpannungzugefuehrtenmittlereLeistung
mech mechP M MechanischeLeistungsentnahme,mitdemDrehmoment mech rM c und rc Reibkoeffizient fr geschwindigkeitsproportionaleLeistungsentnahme.
gesT BetrachtungsDauerderBerechnungTab.1:bersichtberdieamBildschirmangezeigtenErgebnisDaten.
WeitereinteressanteGren,vorAllenderenechtesdynamischesVerhalten(!)alsFunktionderZeit,sindinTab.2wiedergegeben.DadieseGrenzurgrafischenDarstellungderDatenineinvonExcellesbares File exportiert werden, ist in der Tabelle nicht nur die Gre und ihre Berechnungangegeben,sondernauchdieExcelKolumne,inderwirdieErgebnisdatenzurspterenAuswertungwiederfinden.
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 18 von 67
ExcelKolumne
PhysikalischeGre
AngabenzurBerechnungA t Zeitskala
B,C,D , ,T T Tq q q Ladung und deren zeitliche Ableitungen im Schwingkreis der TurboSpule
E,F,G , ,I I Iq q q LadungundderenzeitlicheAbleitungenimSchwingkreisderInputSpuleH,I,J , , DrehwinkelunddessenzeitlicheAbleitungendesrotierendenMagnetenK,L ,I T MagnetischerFludurchdieSpulenM,N , ,,ind I ind TU U IndenSpuleninduzierteSpannungO,P , ,,mag I mag TE E EnergieindenSpulen: 212magE L Q Q,R , ,,cap I cap TE E EnergieindenKondensatoren: 221 12 2cap QE CC U S rotE EnergiedermechanischenMagnetRotation: 2 21 12 2rotE J J T gesE GesamtEnergieimSystem: , , , ,+ + + +ges mag I mag T cap I cap T rotE E E E E E U LastE AmLastwiderstandentnommeneLeistung,Turboseitig: 2Last Last TE R q V U7 InputSpannungW zufP ZugefhrteLeistungberdieInputSpannungX rc Reibkoeffizient(variiertimFalleeinerRegelung)Y mechP berReibungentnommeneLeistung 2mech reib reib rP P M c Z NULL LeerspalteinReserve
Tab.2:bersichtberdienachExcelexportiertenDaten.NunhabenwirunserenDFEMAlgorithmus soweitergnztunderweitert,dasseine realittsnaheBerechnungbeliebig geformterelektrischerundmagnetischerRaumenergieKonvertermglich ist.WirwollendiesimnachfolgendenAbschnittaneinerBeispielGeometrievorfhren.4.RechenbeispieleineskonkretenRaumenergieMotorsDie vorliegendeArbeit und der zugehrigeDFEMAlgorithmuswurde letztlich entwickelt, um denvom Autor ersonnen an EMDRKonverter (ElektroMechanischer DoppelResonanz Konverter)realittsnahundmitbrauchbarerGenauigkeit frpraktisch realisierbarExperimentezuberechnen.AusdiesemGrunde istdieGeometriediesesRaumenergieMotorsdiejenige,diefreinpraktischesRechenbeispielgewhltwerdensoll.DerAufbauentsprichtAbb.9.Im hier vorgestellten Beispiel wird die Geometrie durch einen Satz von 32 InputParameterndefiniert,dazukommeneinigeNaturkonstantenundeinigeabgeleiteteParameterzurKontrollederEingabe (hier 18 Stck), die am Bildschirm angezeigt werden. Eine sinnvolle Vorgabe des InputParametersatzesbentigteinegenaueAbstimmungderWerteaufeinanderunderfordertselbstvomAutordesProgrammseinigeStunden/TageZeit.Achtung:DeruntengezeigteParametersatz istandiespezielleGeometriedesAufbausnachAbb.9angepasst. Fr andere geometrische Anordnungen sind andere Parameterstze zu erstellen. ImProgrammselbstgibtesauerdemnocheinigeUnterprogramme,diederautomatischenVernetzungderAnordnungnachAbb.9inFiniteElementedienen.AuchdieseUnterprogrammemssenfreinenabgendertengeometrischenAufbauggf.entsprechendabgendertwerden.
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 19 von 67
(a.)DefinitionderGeometriedesAufbausWirbeginnenmitderErluterungderEingabeparameter,dieder realittsnaheDFEMAlgorithmusbentigt.Dabei lassenwirausdidaktischenGrndenzunchstnochdiemechanischeLeistungsentnahmeentfallen,weildadurchdas systematischeVerstndnisdesRaumenergieMotorsSchritt frSchritterleichtertwird.{Naturkonstanten,keineInputParameter:}epo:=8.854187817E12{As/Vm}; {MagnetischeFeldkonstante,Naturkonstante}muo:=4*pi*1E7{Vs/Am}; {ElektrischeFeldkonstante,Naturkonstante}LiGe:=Sqrt(1/muo/epo){m/s}; {Lichtgeschwindigkeit,Naturkonstante}{ZumLsenderDifferentialgleichungundzurDarstellungderErgebnisse:}AnzP:=5000000; {AnzahldertatschlichberechnetenZeitSchrittebeideriterativenLsung}dt:=1E6;{Sec.} {DauerdereinzelnenZeitschrittezuriterativenLsungderDgl.}Abstd:=1; {NurfrdieVorbereitung,nichtzumLsenderDgl.,Wertnichtverndern}PlotAnfang:=0000; {ZumDatenExportsnachExcel:ErsterPlotPunkt}PlotEnde:=5000000; {ZumDatenExportsnachExcel:LetzterPlotPunkt}PlotStep:=200; {ZumDatenExportsnachExcel.:SchrittweitedesDatenExports}
{Anmerkung:Da Excel nurmaximal 32.767DatenGruppen verarbeitet, knnen bei feinerZeitdiskretisierungnichtalle tatschlichberechnetenDatenexportiertwerden. InunseremZahlenbeispielwirdnurjeder200stePunktnachExcelexportiert.}
{ZurGeometrieDefinitionderSpulen(DFEMVernertzunggeschiehtautomatisch):}Spsw:=0.01; {AngabeinMetern:SchrittweitederSpulenVernetzung}xo:=0;yo:=6;zo:=5; {GeometrieparameternachAbb.1,AngabeninVielfachenvonSpsw}Ninput:=80; {ZahlderWicklungenderInputSpule,linkeSpuleinAbb.1}Nturbo:=12; {ZahlderWicklungenderTurboSpule,rechteSpuleinAbb.1}nebeninput:=8; {WindungennebeneinanderinderInputSpule}ueberinput:=10; {WindungenuebereinanderinderInputSpule}nebenturbo:=3; {WindungennebeneinanderinderTurboSpule}ueberturbo:=3; {WindungenuebereinanderinderTurboSpule}
{Anmerkung: Hier wurden Spulen mit rechteckiger Geometrie nach Abb. 1 gewhlt. DerSpulenquerschnitt der InputSpule besteht dann aus 8Windungen nebeneinander und 10solchen Lagen bereinander. Der Spulenquerschnitt der TurboSpule besteht aus 3Windungennebeneinanderund3 solchen Lagenbereinander.DieBezeichnung bereinanderbedeutet:radialnachauenangeordnet.}
{ZurEmulationdesDauermagneten:}Bsw:=1E2; {AngabeinMetern}{MagnetfeldSpeicherunginZentimeterSchritten}MEyo:=0.05; {HalbeLngedeszylindrischenDauermagneten}MEro:=0.01; {RadiusdeszylindrischenDauermagneten}MEI:=15899.87553475;{StromdesMagnetfeldEmulationsspulenpaares,AngabeinAmpere}
{Anmerkung:Wir verwenden hier einen zylindrischen Dauermagneten gem Abb. 8 undAbb.9.AuchdieseFormkannbeiBedarfbeliebiggendertwerden.}{ErluterungzurMagnetfeldSpeicherung:DasMagnetfeldwirdineinemhinreichendgroenVolumenstarrandenMagnetengekoppelt,wobeidieFeldstrkeWerteinfinitenSchritteineinem DatenArray abgespeichert werden. Bei Bewegungen des Magneten wird das FeldstarrmitdemMagnetenmitgefhrt.DieSchrittweitederFeldstrkeSpeicherung imDatenArrayheitBsw.}{Anmerkung:DerkrummeWertbeiderEingabedesEmulationsstroms,derzurEmulationdesDauermagneten gehrt, hat den Grund, die Feldstrke geeignet einzustellen. Zu denKontrolldatenwhrendderDateneingabePhasegehrtu.a.auchdievomDauermagnetenerzeugteFeldstrke.Diesekannabgelesenwerden,umdenStromMEIsoeinzustellen,dasseine gewnschte Feldstrke erreicht wird. In unserem speziellen Rechenbeispiel wird ein
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 20 von 67
zylindrischerDauermagnetemuliert,deranseinenbeidenEndenjeweilseineFeldstrkevon1.0Teslaerzeugt.}
{WeiterebentigtetechnischeGren:}DD:=0.10;{Meter} {DurchmesserdesSpulendrahteszurAngabederDrahtstrke}rho:=1.35E8;{Ohm*m} {SpezifischerelektrischerWiderstandvonKupfer,[Koh96]}rhoMag:=7.8E3;{kg/m^3} {DichtedesMagnetMaterials,Eisen,[Koh96]}CT:=36.61E6;{Farad} {KapazittdesKondensators,imSchwingkreisderTurboSpule}CI:=100E6;{Farad} {KapazittdesKondensators,imSchwingkreisderInputSpule}
{Anmerkung:InunseremRechenbeispielwirddieInputSpulezwarmodelliert,ummglichenAnwendern des DFEMAlgorithmus die sptere Aufnahme einer zweiten Spule mglichsteinfachzumachen.AberdieseInputSpule(mitsamtdendazugehrigenInputSchwingkreis)wirdhierimHauptprogrammnichtbenutzt.Sieistdortauskommentiert.}
Rlast:=0.0111;{Ohm} {Ohm'scherLastwiderstandimTurboSchwingkreiszurEnergieEntnahme}UmAn:=50000;{U/min}{AnfangsbedingungmechanischRotierenderMagnet:Startdrehzahl}Uc:=0;{Volt}Il:=0;{Ampere}{AnfangsbedingungelektrischKondensatorspannung,Spulenstrom}
{Anmerkung:AuchSelbstluferbentigeneineStartenergie,umdenLaufderMaschine zuinitiieren. Diese Startenergie kann mechanisch zugefhrt werden, wie im vorliegendenBeispieldurcheineanfnglichevonauenzugefhrteRotationdesMagneten.Siekannaberauch elektrische Energie zugefhrtwerden, zum Beispiel durch anfnglichesAufladen desKondensators oder durch einen anfnglichen Spulenstrom. Auch Selbstlufer laufen nichteinfachsovonalleinelos,sondernmanmusiestarten.}
U7(t)=0;{Anmerkung: IstderRaumenergieKonverterkeinSelbstlufer,sondernnureineoverunityMaschine, somusswhrenddesBetriebspermanentEnergie zugefhrtwerden.DieskannzumBeispielaufmechanischeWeiseberdieRotationsachsegeschehen,ebensogutaberauch auf elektrischemWege. LetztereVariantewurde im vorliegenden ProgrammBeispielbereine InputSpannungmitdemUnterprogrammU7demonstriert.DerLsungsteilderDifferentialgleichung zeigt auch, wie man eine solche InputSpannung in die Differentialgleichung aufnehmen kann. Allerdings wurde diese Spannung im vorliegenden Rechenbeispielnichteingesetzt,weilderEMDRKonvertereinSelbstluferistundsomitkeineInputSpannungbentigt.}
{AbgeleiteteParameter,zuKontrollzwecken,ausobigenParameternberechnet,keineEingabe:}DLI:=4*(yo+zo)*Spsw*Ninput;{Meter} {LngedesSpulendrahtes,InputSpule}DLT:=4*(yo+zo)*Spsw*Nturbo;{Meter} {LngedesSpulendrahtes,TurboSpule}RI:=rho*(DLI)/(pi/4*DD*DD);{Ohm} {Ohm`scherWiderstanddesSpulendrahtes,InputSpule}RT:=rho*(DLT)/(pi/4*DD*DD);{Ohm} {Ohm`scherWiderstanddesSpulendrahtes,TurboSpule}BreiteI:=nebeninput*DD;HoeheI:=ueberinput*DD; {BreiteundHhedesInputSpulenlrpers}BreiteT:=nebenturbo*DD;HoeheT:=ueberturbo*DD; {BreiteundHhedesTurboSpulenlrpers}fkI:=Sqrt(HoeheI*HoeheI+4/pi*2*yo*2*zo)/HoeheI; {Korrekturfaktor zur Induktivittderkurzen
InputSpulenach*1vonS.16}fkT:=Sqrt(HoeheT*HoeheT+4/pi*2*yo*2*zo)/HoeheT; {Korrekturfaktorzur Induktivittderkurzen
TurboSpulenachnach*1vonS.16}LI:=muo*(2*yo+BreiteI)*(2*zo+BreiteI)*Ninput*Ninput/(HoeheI*fkI);
{GeometrischeMittelung=>InduktivittderInputSpule}LT:=muo*(2*yo+BreiteT)*(2*zo+BreiteT)*Nturbo*Nturbo/(HoeheT*fkT);
{GeometrischeMittelung=>InduktivittderTurboSpule}omT:=1/Sqrt(LT*CT); {KreisEigenfrequenzdesTurboSpulenSchwingkreisesausLT&CT}TT:=2*pi/omT; {klassischeSchwingungsdauerdesTurboSpulenSchwingkreisesausLT&CT}Mmag:=rhoMag*(pi*MEro*MEro)*(2*MEyo); {MassedesMagneten}J:=Mmag/4*(MEro*MEro+4*MEyo*MEyo/3); {TrgheitsmomentdesMagnetenbei
RotationumQuerachse,siehe*2vonS.13undDubbelS.B32}
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 21 von 67
omAn:=UmAn/60*2*pi; {StartWinkelgeschwindigkeit(rad/sec.)desrotierendenMagneten}UmSec:=UmAn/60; {StartWinkelgeschwindigkeit,rot.Magn.inUmdrehungenproSekunde}
{Anmerkung:ManchedieserGrenwerdennichtnurzurKontrollebentigt,sondernauchfrdieweitereVerarbeitungimDFEMAlgorithmus.}
MitdengezeigtenParameternwirdeinRaumenergieMotormodelliert,wieer inAbb.11zusehenist. Die Zeichung ist sogar mastabsgetreu. Man sieht nur die TurboSpule, da die InputSpuleweggelassenwurde,weildieseLetztgenanntebeimEMDRKonverter,denderAutorersonnenhat,nichtbentigtwird.
Abb.11:(gezeichnet unter Verwendung [Ans 08],gerechnet wurde mit dem Ansys allerdingsnicht,weilesdieDynamiknichtwiegefordertbeherrscht.)EMDRKonverter mit einem rotierendenMagneten(inroterFarbe:Lnge10cm,Dicke2 cm). Ebenfalls in roter Farbe wurde einednne Rotationsachse eingezeichnet, um dieder zylindrische Stabmagnet sich dreht. Anden beiden Enden der Rotationsachsebefindet sich jeweils ein Lager zu HalterungderAchse(ebenfallsinroterFarbe).DieWindungenderTurboSpulesindinblauerFarbegezeichnet, sodassdievomMagnetenerzeugten Feldlinien bei der Rotation desMagneten die Spulendrhte senkrechtschneiden.Aufgrund der praktischen Dimensionierungdes EMDRKonverters (siehe unten) ist esntig,dieSpuleaussehrwenigensehrdickenDrhten herzustellen. Der Spulenquerschnittbetrgt56cm2,dieDickedesDrahtes liegtbei10mm.
Die Zeitschritte bei der numerischiterativen Lsung der Differentialgleichung mssen fein genuggewhlt werden, dass jede einzelne Periode aus hinreichend vielen einzelnen Rechenschrittenzusammengesetztwird.DazusinddieimobigenDatensatzgezeigteZeitintervallevon 1 sec.dt beieinerDrehzahlvon50.000Umdrehungen/Minutebeiweitemnichtausreichend. InderpraktischenBenutzung desDFEMAlgorithmus beginntmanmit solch groben Zeitschritten nur, um ein erstesGefhlfrdasVerhaltenderMaschinezubekommen.MitdiesengrobenZeitschrittenlsstsichdannzumBeispieldieEinstellungderSystemparameterfrdieMaximierungdergewandeltenLeistungausRaumenergie in einer grobenAbschtzung ermitteln.Hatmandieses Ziel erreicht, somssendieZeitschritte sukzessive verkleinert werden, um die Konvergenz des Algorithmus zur untersuchen.Diese isterreicht,sobaldeineweitereVerfeinerungderZeitschrittekeinewesentlicheVernderungderZahlenwerteindenErgebnissenmehrnachsichzieht.SobalddieZeitschrittesoweitverfeinert,sind,dassdieKonvergenzzufriedenstellend ist,beginntdieFeinAbstimmungderSystemparameterzueinererneutenabermaligenMaximierungdergewandeltenLeistungausRaumenergie.UmdieOptimierungder Systemparameter zu erleichtern,wurdedemProgramm eineBildschirmAusgabe angefgt, die eine rasche Evaluierung der Tauglichkeit der Systemparameter ermglicht.DabeiwerdenfolgendeDatenangezeigt:
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 22 von 67
- DieStartenergieimSystem,dieindieDifferenzialgleichungenberdieAnfangsbedingungeneingebrachtwird.Sieerrechnetsichu.a.ausdenobengenanntenParameternUmAn,Uc,Il.
- DieEnergieimSystemamEndedesZeitraumsderBerechnung.HierzuwerdenalleimSystementhaltenen Energiebetrge addiert, also die Bewegungsenergie des/der Magneten, dieEnergienallerSpulenundauchdieEnergienallerKondensatoren.
- DieEnergieZunahmedesSystemswhrenddesBerechnungsZeitraums,dieangegebenwirdals Differenz zwischen der Startenergie und der EndEnergie. Ist die EnergieZunahmezuzglich der entnommenen Energie positiv, so konvertiert das System Raumenergie inklassischeEnergie.IstdieEnergieZunahmeplusdieentnommeneEnergiehingegennegativ,so konvergiert das System umgekehrt klassische Energie in Raumenergie, oder es gehtEnergiedurchReibungsverluste verloren (wobeiwir allerdingsReibung inderBerechnungbercksichtigen). Ein idealer klassischer Elektromotor wrde zum Beispiel (wenn erreibungsfreilaufenknnte),alsDifferenzzwischenderEndEnergieundderAnfangsEnergiegenau diewhrend des Betriebs zugefhrte Energie abzglich der entnommenen Energieanzeigen.
- DieLeistungsnderung imSystem,diesichganzsimpelausderEnergieZunahme imBezugaufdiegesamteBerechnungsDauerergibt.
- Die whrend des Betriebs am Ohmschem Widerstand entnommen der Energie, und diezugehrigedortentnommeneLeistung.NichtangezeigtwerdenOhmscheVerlusteandenSpulendrhten; diese werden zwar in die Berechnung einbezogen und tatschlich alsLeistungsbzw.EnergieVerlustebercksichtigt,abersiewerdennichtangezeigt,dennmankannsienichtbeeinflussen.
- Die bei mechanischer Belastung entnommene mittlere mechanische Leistung und diemechanische entnommeneGesamtenergie. Sie kann durch geeigneteManahmen an derdrehendenWelleabgegriffenwerden,diedurchdieMittedesrotierendenDauermagnetenverluft. Jetzt, in denAbschnitten 4 und 5wird sie noch nicht betrachtet, aber spter inAbschnitt6wirdsieimDetailbesprochen.
- Auer der mechanisch entnommenen Leistung und Energie gibt es aber auch noch einemechanischeEnergiezunahmeimSystem,diedortverbleibt.
- DieberdieInputSpannungindieInputSpulezugefhrteLeistungwirdzwarangezeigt,abersie ist imvorliegendenRechenbeispielNULL,weilkeineEnergiezugefhrtwird.DerEMDRKonverter isteinSelbstlufer.DieAnzeigedieseEnergiewirdnurexemplarischvorgefhrt,um den Lesern und Leserinnen der Publikation die Benutzung des DFEMAlgorithmus zuerleichtern.
- DiegesamteDauerderSimulationsBerechnung,diesichalsdieSummeallerZeitschrittedtergibt.GemeintistnichtdieCPUZeitderBerechnung,sonderndiederSimulationzugrundeliegendeBetriebsdauerdesRaumenergieKonverters.
DievorangehendbeschriebenekurzeBildschirmEvaluationeinigerausgewhlterErgebnissehilft,umeineeinfacheund rascheKontrolledesBetriebszustandsdesKonverters zurVerfgung zu stellen,damitmanAussagenzurweiterenVariationundOptimierungderSystemparametermachenkann.Durch wiederholtes Variieren der Systemparameter und wiederholt erneutes Berechnen desverndertenKonverterslsstsicheinAufbauermitteln,deralsRaumenergieKonverterfunktionierensollte(zumindesttheoretisch).HatmandiesenAufbauermittelt, soempfiehlt sichdievollstndigeEvaluierungdesSystems,undzwar unter grafischer Kontrolle der Systemvariablen als Funktion der fortlaufenden Zeit. Diesgeschieht am bequemsten, indemman die in Tab. 2 aufgezhlten ExcelKolumnen direkt in Excelgraphischdarstellt.Dabeimssen zuallererstundvorAllemFragenbeantwortetwerdenwieetwadiese:
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 23 von 67
- HatdasSystemschonseinenstabilenBetriebszustandbereitserreicht?DieserkenntmanzumBeispielanderzeitlichenEntwicklungderWinkelgeschwindigkeit desSystems,die imstabilenBetriebszustandumeinenkonstantenWertoszilliert.AuchderSpulenstrom und die Kondensatorspannung mssen um jeweils einen konstanten Wertoszillieren.IstdiesnichtderFall,soistderKonverterentwedernochinderAnlaufphase,oderer luft berhaupt nicht in einem stabilen Betriebszustand. Um zwischen diesen beidenMglicheitenunterscheidenzuknnen,empfiehltsicheineVerkrzungderZeitschrittedtbei gleichzeitigerVergrerungder gesamtenBeobachtungsdauer. (LetzereManahme istwichtigeralsdieerstgenannte.)
- Wird beim Anlauf derMaschine genugmechanische Leistung erzeugt, dass dieMaschinenichtaufgrundderReibungzumStillstandkommt?HierzukontrolliertmandiemechanischeRotationsenergie(desDauermagneten)alsFunktionder Zeit. Im Falle einer mechanischen Leistungsentnahme (siehe Abschnitt 6) kann mangezielt die Reibungskoeffizienten vorgeben und die zugehrige entnommene Leistunganzeigenlassen.
- MankontrolliertauchdiezeitlichenVerlufederStrmeundSpannungenimLCSchwingkreisgraphisch, um sich nicht auf die simple Abschtzung des Maximums der einfachenBildschirmAusgabeverlassenzumssen.BeieinemordentlichenBetriebderMaschinealsRaumenergieKonvertersinddieSpannungenundStrmemeistensziemlichgro,undmanmussfrdenpraktischenAufbausichersein,dieSpulendrhteunddieKondensatorennichtzuberlasten.
Allerdings sei erwhnt, dass die Laufzeit des DFEMAlgorithmus bei feinen Zeitschritten (z.B. imBereicheinigerNanosekunden)durchausCPUZeiten imBereicheinigerMinutenbishinzueinigenStunden(jenachGesamtdauerderderBerechnungzuGrundeliegendenZeitspanne)erfordernkann.5.EinkonkreterEMDRRaumenergieKonverterDie Inbetriebnahmedes imAnhangbefindlichenDFEMProgrammsbentigteinDatenfilenamens'schonda',welchesgemeinsammitdemQuellcodedesDFEMProgrammskostenlos im InternetvondenSeitendesAutorsdervorliegendenPublikationheruntergeladenwerdenkann.DiesesDatenfile'schonda' hat lediglich den Zweck, CPUZeit zu sparen, sofern in der Initialisierungsphase desHauptprogrammsdiedorteingegebenenGeometrieparameterseitdemletztenLaufdesProgrammsnichtverndertwurden.DieInitialisierungsphasedientnmlichderautomatischenGenerierungderVernetzung (in finiteElemente),derEntwicklungderFourierreiheundeinigerVorarbeiten,diedieGeometriedesSystemsbeschreiben.WurdedieseVernetzungaber seitdem letztenLaufdesProgramms nicht gendert, so ist eine erneuteBerechnung der Initialisierungsphase nicht ntig, unddeshalbknnendieErgebnissederInitialisierungsphasedirektausdemDatenfile'schonda'ausdemvorangehenden Lauf des Programms entnommen werden, so dass die CPUZeit fr denInitialisierungsprozess eingespartwerden kann.Dies erleichtert denwiederholtenAblauf des ProgrammszurOptimierungderSystemparameterwesentlich.Wirwollen jetzt inAbschnitt5dieSystemparametergemderEinstellungdiskutieren,wiesie imAnhangdesvorliegendenArtikelswiedergegebenist.Die typische Konstruktion eines EMDRKonverters beginnt mit der Suche eines geeignetenMagneten. Istergefunden,und istseineFeldstrkevermessen(zumBeispielmiteinerHallSonde),sogibtmanseineAbmessungen indieEingabeDatenzeileneinundkonstruiertsodanneineStromverteilung,dieanhandgeeigneterDauermagnetEmulationsspulendasgemesseneFeld theoretischreproduziert.
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 24 von 67
DanachmoduliertmandieTurboSpuleundgibtdierestlichenDatenfrdenDFEMAlgorithmusein.ZuletztangepasstwirddieStartdrehzahldes rotierendenMagneten, zuallerletztdieKapazittdesKondensatorsimTurboSchwingkreis.DasKriteriumfrdieStartdrehzahldesrotierendenMagnetengehtaufdiezurVerfgungstehendeLagerungzurck.MandarfdievorhandeneLagerungnichtmitder EndDrehzahl im stabilen Betriebszustand der Maschine berlasten. Das Kriterium fr dieJustierungderKapazittistdiemaximalerreichbareMagnetRotationsdrehzahl.EinegroeDrehzahlistfrdieWandlungderRaumenergiegnstigeralseinekleineDrehzahl,unddiemaximaleDrehzahl,dieaufdemBildschirmausgegebenwird,istimVergleichzurStartdrehzahleindirektesMafrdieZunahme der Drehzahl whrend der berechneten Betriebsdauer. Zunchst einmal wird bei sehrkleinemLastwiderstanddieKapazittsojustiert,dassdieseDrehzahlZunahmemaximalwird.Dabei stellt man hufig fest (je nach gewhlter Geometrie), dass die gewandelte mechanischeLeistungwesentlichgrer ist,alsderelektrischeLeistungsgewinn imSystem.(Darin liegtauchderGrund, warum wir spter in Abschnitt 6 die eigentliche Nutzleistung des RaumenergieMotorsmechanischanderdrehendenWelleabgreifenwollen.)Man variiert nun sukzessive in kleinen Schritten den Lastwiderstand und beobachtet dabei dieVernderungdesmechanischenunddeselektrischenLeistungsgewinns (wobeiman immerwiederdenKondensatornachjustierenmu). JenachEinstellungdesKonvertersknnenbeideLeistungengleichzeitigzunehmenoderabnehmenoderauchgegenlufig.MandarfdenLastwiderstandnichtzustark erhhen, sonst dmpft man die Maschine derart massiv, dass sie nicht mehr ordentlichanlaufenkann.IstdiemechanischeLeistungsaufnahmederMaschinegro,ggf.sogardeutlichgrerals die elektrische Leistungsabgabe am Lastwiderstand, so strenwir uns daran berhaupt nicht,denneine starkemechanischeLeistungszunahmeverleihtderMaschine spter inAbschnitt6einehohe Nutzleistung. Im brigen stellt eine hohe mechanische Leistungszunahme sicher, dass diemechanischgewonneneLeistungmitSicherheitausreicht,umdieReibungzuberwinden.BeiderJustierungerkenntman,dassbereitsindertheoretischenBerechnungsowohlderLastwiderstandalsauchdieKapazittmiteinerziemlichhohenGenauigkeiteingestelltwerdenmssen.Diesmachtuns eindrucksvoll klar,dass entsprechendeAnforderungenhinsichtlichder feinenVariationund der Einstellung sowohl an den Lastwiderstand als auch andie Kapazitt auch impraktischenAufbau gerichtet werden. Hier sind drei numerisch signifikante Stellen durchaus sinnvoll. ImZusammenhangmitdennachfolgenddargestelltenStromundSpannungsWerten imelektrischenSchwingkreisstelltdiessicherlicherheblicheAnforderungenandiebeidenBauteileLastwiderstandundKondensatordar.DashiergezeigteRechenbeispielistnichtimBezugaufdieerzielbareLeistungausoptimiert,dadieserst in Abschnitt 6 unter Bercksichtigung der zur Verfgung gestellten mechanischen Leistungsinnvollseinwird.Trotzdem sei hier angemerkt, dass man die aus der Raumenergie gewandelte Leistung deutlicherhhenkann,wennmandieZahlderWindungenderTurboSpuleeinwenigerhht(wasallerdingsdie Spannung am Kondensator deutlich erhht). Ein sehrwirkungsvollesMittel zur Erhhung dererzielbarenLeistungistauchdieDrehzahl.MitihrsteigtdieerreichbareLeistunggewaltigan.Diehierverwendeten 30.000 Umdrehungen/min werden als eher moderat angesehen. Diese Begrenzungdient dazu, die Anforderungen an die Lagerung des rotierenden Dauermagneten nicht zu growerden zu lassen (was fr erste Prototypen ganz angenehm sein kann). Denkt man jedoch antypische Drehzahlen von TurboladerRotoren (im Automobilbereich) im Bereich von 100.000Umdrehungen/min oder noch wesentlich hher, so ist klar, dass man eine gewaltigeLeistungssteigerung durch eine Erhhung der Drehzahl auch bei dem hier vorgestelltenRaumenergieKonverter ohne allzu groe Probleme erreichen kann.Noch hhereDrehzahlen voneinigen 100.000 Umdrehungen/min, wie etwa in der Zahnmedizin blich, oder bei TurboVakuumpumpen wrden mit Sicherheit dazu fhren, dass auch ein dicker Kupferdraht als Spuleschnellbeginnenwrdezuerhitzenundggf.zuschmelzen.
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 25 von 67
WillmandieBerechnungundderenErgebnissedokumentieren, sogibtmanunmittelbarvordemendgltigenVerlassendesProgramms (vordem letzten)einDein,gefolgtvonReturn.Das Programm zeichnet nun die Ergebnisse der Berechnung auf, und zwar in einem File namensAuswertung, welches man mit Textverarbeitungsprogramm lesen kann. Die dokumentiertenErgebnisseindemhierbeschriebenenRechenbeispielsehendabeiinetwawiefolgtaus:DFEM-Simulation eines EMDR-Motors (hier noch ohne mechanische Leistungs-Entnahme) Parameter zum Lsen der Dgl. und zur Darstellung der Ergebnisse: AnzP = 10000000 Zum Lsen der Dgl.: Anzahl der tatschlich berechneten Zeit-Schritte dt = 2.000E-0007 {Sekunden} Dauer der Zeitschritte zur iterativen Lsg. der Dgl. Abstd= 1 {Nur Vorbereitung, nicht zum Lsen der Dgl.: Jeden wievielten Punkt soll ich plotten ins Excel? PlotAnfang = 0 {Zum Lsen der Dgl.: Erster-Plot-Punkt: Anfang des Daten-Exports nach Excel PlotEnde = 10000000 {Zum Lsen der Dgl.: Letzter-Plot-Punkt: Ende des Daten-Exports nach Excel PlotStep = 400 {Zum Lsen der Dgl.: Schrittweite des Daten-Exports nach Excel Es folgt die Eingabe der beiden Spulen, vgl. Zeichnung *2 von S.1 : Die Spulen werden nach Vorgabe der Geometrieparameter automatisch vernetzt. Spsw = 0.010000 Angabe in Metern: Die Spulen-Aufgliederung ist in Spsw-Schritten xo = 0, Angaben in Vielfachen von Spsw, Geometrieparameter nach Zeichnung*2 von S.1 yo = 6, Angaben in Vielfachen von Spsw, Geometrieparameter nach Zeichnung*2 von S.1 zo = 5, Angaben in Vielfachen von Spsw, Geometrieparameter nach Zeichnung*2 von S.1 Ninput = 100 Zahl der Wicklungen der Input-Spule Nturbo = 9 Zahl der Wicklungen der Turbo-Spule nebeninput = 10 Windungen nebeneinander in der Input-Spule ueberinput = 10 Windungen uebereinander in der Input-Spule nebenturbo = 3 Windungen nebeneinander in der Turbo-Spule ueberturbo = 3 Windungen uebereinander in der Turbo-Spule Bsw = 1.0E-0002 Magnetfeld-Speicherung nach *1 von S.2 in Zentimeter-Schritten Ich emuliere hier das Magnetfeld eines 1T-Magneten durch ein Spulenpaar nach *1 von S.5: MEyo = 5.00000E-0002 y-Koordinaten der Magnetfeld-Emulationsspulen nach *1 von S.5 MEro = 1.00000E-0002 Radius der Magnetfeld-Emulationsspulen nach *1 von S.5 MEI = 1.58998E+0004 Strom des Magnetfeld-Emulationsspulenpaares nach *1 von S.5, Angabe in Ampere Allgemeine technische Gren: DD = 0.0100000 {Meter} {Durchmesser des Spulendrahtes zur Angabe der Drahtstrke rho = 1.35000000000000E-0008 {Ohm*m} {Spez. elektr. Widerstand von Kupfer, je nach Temperatur, Kohlrausch,T193 rhoMag = 7.80000000000000E+0003 {kg/m^3} {Dichte des Magnet-Materials, Eisen, Kohlrausch Bd.3 CT = 9.83000E-0005 {Farad} {Kapazitt des Kondensators, der mit in der Turbo-Spule (!) in Reihe geschlaltet CI = 1.00000E-0004 {Farad} {Kapazitt des Kondensators, der mit in der Input-Spule (!) in Reihe geschlaltet Sonstige (zur Eingabe): Rlast = 6.400000E-0002 {Ohm} Ohmscher Lastwiderstand im LC-Turbo-Schwingkreis UmAn = 30000.00 {U/min} Anfangsbedingung mechanisch - Rotierender Magnet: Startdrehzahl Uc = 0.00 {Volt} Anfangsbedingung elektrisch - Kondensatorspannung am TURBO-Kondensator Il = 0.00 {Ampere} Anfangsbedingung elektrisch - Spulenstrom im TURBO-Schwingkreis Abgeleitete Parameter. Die Gren werden aus den obigen Parametern berechnet, es ist keine Eingabe mglich: DLI:=4*(yo+zo)*Spsw*Ninput = 44.00000 {Meter} Lnge des Spulendrahtes, Input-Spule DLT:=4*(yo+zo)*Spsw*Nturbo = 3.96000 {Meter} Lnge des Spulendrahtes, Turbo-Spule RI:=rho*(DLI)/(pi/4*DD*DD) = 0.00756 {Ohm} Ohm`scher Widerstand des Spulendrahtes, Input-Spule RT:=rho*(DLT)/(pi/4*DD*DD) = 0.00068 {Ohm} Ohm`scher Widerstand des Spulendrahtes, Turbo-Spule BreiteI:=nebeninput*DD = 0.10000 Breite und Hhe des Input-Spulenlrpers HoeheI:=ueberinput*DD = 0.10000 Breite und Hhe des Input-Spulenlrpers BreiteT:=nebenturbo*DD = 0.03000 Breite und Hhe des Turbo-Spulenlrpers HoeheT:=ueberturbo*DD = 0.03000 Breite und Hhe des Turbo-Spulenlrpers fkI:=Sqrt(HoeheI*HoeheI+4/pi*2*yo*2*zo)/HoeheI = 123.61179 Korrekturfaktor zur Induktivitt der kurzen Input-Spule fkT:=Sqrt(HoeheT*HoeheT+4/pi*2*yo*2*zo)/HoeheT = 412.02703 Korrekturfaktor zur Induktivitt der kurzen Turbo-Spule LI:=muo*(2*yo+BreiteI)*(2*zo+BreiteI)*Ninput*Ninput/(HoeheI*fkI) = 1.24238647244960E-0001 Induktivitt Input-Spule
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 26 von 67
LT:=muo*(2*yo+BreiteT)*(2*zo+Breitet)*Nturbo*Nturbo/(HoeheT*fkT) = 9.93606632469255E-0004 Induktivitt Turbo-Spule omT:=1/Sqrt(LT*CT) = 3.19974964955735E+0003 Kreis-Eigenfrequenz des Turbo-Spulen-Schwingkreises aus LT & CT TT:=2*pi/omT = 1.96364903362012E-0003 Schwingungsdauer des Turbo-Spulen-Schwingkreises aus LT & CT. Mmag:=rhoMag*(pi*MEro*MEro)*(2*MEyo) = 0.245 kg Masse des Magneten {Rotation um Querachse !!} J:=Mmag/4*(MEro*MEro+4*MEyo*MEyo/3) = 2.10329628157837E-0004 Trgheitsmoment des Magneten bei Rotation um
Querachse Anzeige einiger auszurechnender Parameter: Magnet: Start-Winkelgeschw.: omAn = 3141.592654 rad/sec Magnet: Startdrehzahl, Umdr./sec.: UmSec = 500.0000000000 Hz Masse des Magnet = 0.245044 kg Traegheitsmoment Magnet bei QUER-Rotation 2.10329628157837E-0004 kg*m^2 Gesamtdauer der Betrachtung: 2.00000000000000E+0000 sec. Excel-Export: 0.00000E+0000... 2.00000E+0000 sec., Step 8.00000E-0005 sec. Das sind 25000 Datenpunkte (also Zeilen). ********************************************************************************************************* Einige Ergebnisse der Berechnung: Anfangs-Energie im System: 1037.93511187 Joule End-Energie im System: 1171.18167853 Joule Leistungs-Aenderung im System: 66.62328333 Watt Am Lastwiderstand entnommene Gesamtenergie = 13.29139772 Joule entsprechend einer mittleren entnommenen Leistg: 6.64569885828765E+0000 Watt Ueber Input-Spannung zugefuehrte Gesamt-Energie: 0.00000000000000E+0000 Joule entsprechend einer mittleren zugefuehrten Leistg: 0.00000000000000E+0000 Watt bei einer Betrachtungs-Dauer von 2.00000000000000E+0000 sec. ObensiehtmaneineProtokollierungdereingegebenenundderdaraushergeleitetenGren.UntenfindetmandenAbschnittEinigeErgebnissederBerechnung,demwirjetztunsereAufmerksamkeitzuwendenwollen:Bei einer BetrachtungsDauer von 2 Sekunden (die bentigte CPUZeit liegt bei den meistenComputern deutlich hher)wird einemechanische Leistungszunahme von 66.62Watt im Systembeobachtet,unddazueineelektrischeLeistungsabgabeandenLastwiderstandvon6.645Watt.BeideLeistungen sind ohne klassische Energiequelle erzeugt worden, wurden also der Raumenergie(zumindestauseinerbisherunbekanntenEnergiequelle)entnommenundgewandelt.Vergrert man die BetrachtungsDauer, so kann eine Verringerung der LeistungsWandlungbeobachtetwerden.Dies liegtabernichtdominantanunvollstndigerKonvergenzdesAlgorithmus(aufgrund der Gre der Zeitschritte), sondern es hat seinen Grund in der Tatsache, dass dieMaschine imAnlaufbetriebeinanderesVerhalten zeigt,alsnachdemEinschwingen inein stabilesFliegleichgewicht.Wirerkennendieseindeutig inAbb.12,beiderdieSpalte IdesExcelDatenprotokollsangezeigtist,diedieWinkelgeschwindigkeitdesrotierendenMagnetenenthlt(abzurufenindemvomProgrammautomatischerzeugtenFiletest.)
Abb.12:Winkelgeschwindigkeit des rotierenden Magneten, die sich alsFunktion der Zeit und ohne klassische Energiezufuhr erhht. Zu Beginn des Betriebs sieht man diestarke EnergieAufnahme whrenddesHochlaufsderMaschine.GegenEnde der BetrachtungsDauer konvergiert der Betriebszustand allmhlich gegen die Sttigung, hatdieseabernochnichterreicht.
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 27 von 67
Die KondensatorSpannung entnimmt man aus der Ladung des Kondensators, deren zeitlicheEntwicklungwir inAbb.13 sehen.Allerdings erkenntman aufgrundderbegrenztenAuflsungderGrafik nur die Einhllende der tatschlichen Schwingung, da bei der tatschlichen Berechnung10.000.000 Punkte bercksichtigt wurden, die bei einer ComputerGrafik natrlich nicht alledargestelltwerdenknnen.
Abb.13:IngrnerFarbeerkenntmandieEinhllende der Ladung alsFunktion der Zeit, die in Formeiner Schwingung in denKondensator hinein fliet unddiesenwiederverlsst.
DasMaximum der Spannungsamplitude liegt bei max,max 0.01 10298.3C TurboQ CU VoltC F . Es sollte kein
Problem sein, solcheKondensatoren zubekommen.ErhhtmandieZahlderWindungen, sokannman auch noch deutlich grere Spannungen anfahren und somit die elektrisch entnehmbareLeistung wesentlich erhhen (und damit brigens auch die mechanisch zur Verfgung gestellteLeistung).DerSpulenstrom ist inAbb.14miteinemMaximumvonetwasber30Azuerkennen.Erhhtmandie Zahl der Windungen oder senkt man den Lastwiderstand ab, so lsst sich nach geeigneterJustierungder restlichenSystemparametereinewesentlicheErhhungdesSpulenstromserwirken.BeieinemSpulendrahtwie inAbb.11miteinemDurchmesservon10mm (Querschnittsflche78,5mmistdieskeinerleiProblem.
Abb.14:Einhllende des SpulenstromsalsFunktionderZeit.
DieSpulenspannung,derengraphischeDarstellungeinehnlicheFormderEinhllenden zeigt,wieAbb.13undAbb.14,sollteeinevergleichbareAmplitudehabenwiedieKondensatorspannung,wennder Konverter einigermaen vernnftig eingestellt ist. Mit einem Wert von 99 Volt ist diesesKriteriumberraschendguterfllt.
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 28 von 67
DieBeschleunigungdes rotierendenMagneten,derenEinhllendewir inAbb.15sehen,zeigteinemerklicheOszillation innerhalbeinerPeriode,woranmanerkennt,dazwischendenLadungen imLCSchwingkreisunddenMagnetendurchausmerklicheKrfteausgetauschtwerden.(MitentsprechendermechanischerFestigkeitmussdieAnordnungimpraktischenExperimentaufgebautsein.)DasFliegleichgewichtdeseingeschwungenenZustandsisterreicht,wenndieseOszillationsymmetrischumdieAbszissestattfindet washiernochnichtganzderFall ist,wiewirauchschonausderDiskussion zu Abb.12 erwarten. Da auch am Ende des BerechnungsZeitraumes der Mittelwert derWinkelbeschleunigungnochdeutlich impositiven liegt,hatderRotoroffensichtlichnochnichtdieMaximaldrehzahlerreicht.
Abb.15:Einhllende der Winkelbeschleunigung als Funktion derZeit.
Die Frage nach der Qualitt der numerischen Iteration beantworten wir nach Betrachtung eineshochauflsendenZeitfensters,dasswiraufeinederbisherdiskutiertenGrensetzen.EinBeispielhierfr ist Abb. 16, in der ein Fenster von ca. 5 ms mit etwa fnf Schwingungsperioden derWinkelbeschleunigung wiedergibt. Sind die Kurven unregelmig oder gar gezackt, so liegt dertypische Fall eine Unterabtastung vor, der eine Verringerung der diskreten Zeitschritte dt frratsamerscheinenlsst,wodurchsichnatrlichbeigleichbleibenderGesamtBetrachtungsdauerdieZahl der Rechenschritte und damit die CPUZeit erhht.Da in unserem Beispiel eine zufriedenstellendeAbtastungvorliegt,erkenntmaninAbb.16.
Abb.16:Betrachtung mit hoher ZeitauflsungzwecksBegutachtungderQualitt der numerischenIteration.
Obwohl dem System permanent Leistung entnommenwird (siehe Abb. 17),wchst die GesamtenergieimSystemwhrenddesgesamtenUntersuchungszeitraumsstrengmonoton(sieheAbb.18).DieseBeobachtunglsstsichbiszumErreichendesstabilenZustandesFliegleichgewichtfortsetzen.
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 29 von 67
Abb.17:Elektrische LeistungsEntnahmeamLastwiderstand.
Abb.18:Gesamtenergie im System, alsoin der Spule, im Kondensatorund in der Drehbewegung desrotierendenMagneten.
Eine zugefhrte Leistung ber den InputSchwingkreis gibt es in unserem Beispiel nicht, da dieMaschinealsSelbstluferarbeitet.AusdiesemGrunderbrigtsicheineDarstellungdieserGre.Eine LangzeitAnalyse der am Lastwiderstand entnehmbaren elektrischen Leistung findet man inAbb.19. Von den vorangehenden Kurzzeitanalysen unterscheidet sie sich lediglich durch die AusdehnungdesgesamtenBeobachtungszeitraumesauf40Sekunden.Ganzoffensichtlichkonvergiertdie am Lastwiderstand entnehmbare elektrische Leistung gegen Null, was man auch durch eineweitereVerlngerungdesUntersuchungszeitraumsdeutlichbelegenkann.
Abb.19:Am Lastwiderstand elektrischentnehmbare Leistung in derLangzeitAnalyse.
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 30 von 67
DerGrundistfolgender:Um leistungsstark arbeiten zu knnen, muss eine endliche (und bleibende) Phasenverschiebungzwischen der elektrischen Schwingung im LCSchwingkreis und der mechanischen Rotation desMagnetenvorhandenseinundaufrechterhaltenwerden.DiesePhasenverschiebungwirdunbedingtbentigt,damitdasvonderSpuleerzeugteMagnetfelddenMagneteningenaudemjenigenMomentbeschleunigt, in dem es besonders stark ist, aber hingegen den Magneten genau in demjenigenMomentbesonderswenigabbremst,indemesbesondersschwachist.MankanndiesdurcheinganzeinfachesModellveranschaulichen.DieSchwingung imLCSchwingkreis sorgt dafr, dass die in diesem Schwingkreis enthaltene Energie zwischen der Energie deselektrostatischenFeldesimKondensatorundderEnergiedesmagnetischenFeldesinderSpulehinundherschwingt.Diesmachtsiegenauzweimal in jederSchwingungsperiode,denndieKondensatorplattenwerdenwechselseitigpositivodernegativaufgeladen,dieSpulenwerdenwechselseitignachNordpolundSdpol aufgeladen. IndenjenigenMomenten, indenendieFeldenergiegeradeinderSpuleist,wirdderrotierendeMagnetdeutlichbeschleunigt,wohingegenderrotierendeMagnet wenig abgebremst wird, zu denjenigen Zeitpunkten, in denen die Energie gerade imKondensator ist.ManbetrachtehierzuAbb.20,welchesdenFalldergnstigenPhasenverschiebungfreine starkeRotationbeschreibt.Wir sehendortachtMomentaufnahmen,die inquidistantenZeitabstndenaufeinander folgenund von18durchnummeriert sind.Die imviolettgezeichnetenKondensatorenthaltene Ladung istmitpositivemundnegativemVorzeichenandenKondensatorplatten gekennzeichnet, und zwar umsomehr, jemehr Ladung die entsprechenden Kondensatorplatten enthalten. Fliet die Ladung durch den Schwingkreis, so gibt ein schwarzer Pfeil dieFlurichtung an,wobei die Ladung natrlich durch die blau gezeichnete Spule flieenmuss, unddabeieinenStrominderSpulehervorruft,derdasamSpulenrandmarkierteMagnetfeldverursacht.AuchhiersymbolisiertdieAnzahlderSymbole(NundS)dieStrkedesFeldes.BeginnenwirmitunsererBetrachtungbeiBildTeilNr.1.ZumZeitpunktt1 istderKondensatornochleichtgeladen,aberesexistiertaucheinmigerStromflussdurchdieSpule,derfreinentsprechendes Magnetfeld sorgt. Aufgrund der Polaritt der Magnetfelder (von Spule und Dauermagnetrelativzueinander)wirdderDauermagnet ineineRechtsDrehungversetzt. InBildTeilNr.2 istderKondensator vollstndig entladen, so dass der Strom durch die Spule maximal ist. Hier liegt diegesamte Feldenergie als MagnetfeldEnergie vor. Dadurch werden die Pole des Dauermagnetenbesondersstarkangezogen,d.h.dieRotationwirdbesondersdeutlichverstrkt.BeiBildTeilNr.3hatsichdasMagnetfeldderSpuleinzwischenschoneinStckweitabgebaut,aberaufgrundderStellungdes Dauermagneten kann das Magnetfeld der Spule den Dauermagneten ohnehin nicht mehrbeschleunigen.WrdedasFeldderSpulenichtvollstndigabgeklungen sein, sowrde inBildTeilNr.4daszuvorvorhandeneMagnetfelddieRotationdesDauermagnetensogarwiederabbremsen.Dass dies nicht passiert, hat seineUrsache darin, dass die gesamte schwingende Energie des LCSchwingkreisesnun in Form eines elektrischen Feldes imKondensator vorliegtund somit aufdenDauermagnetenkeineKrfteausbt. (DieSpule istohneFeld.)AbnunbeginntaberdieEntladungdes bei BildTeil Nr.4 maximal aufgeladenen Kondensators, die wir in BildTeil Nr.5 schon gutbeobachten knnen.Der Entladestrom flietnatrlich inder entgegengesetztenRichtungwiebeiBildTeilNr.1,sodassdasMagnetfeldderSpuleinBildTeilNr.5dieumgekehrtePolaritthatwieinBildTeilNr.1. InBildTeilNr.5bautsichdasMagnetfeldderSpule langsamaufunderreicht inBildTeil Nr.6 seine maximale Feldstrke. Entsprechend wird hier der Magnet in BildTeil Nr.5 und 6abermalszurRechtsdrehungbeschleunigt.BildTeilNr.7entsprichtderUmkehrungvonBildTeilNr.3.Dasnoch leichtvorhandeneMagnetfeldderSpulegibtkeinDrehmomentaufdenDauermagnetenaus,weildieserbereitsnachdemFeldausgerichtetist.InAnalogiezuBildTeilNr.4siehtmanauchinBildTeilNr.8keinbremsendesDrehmomentaufdenDauermagneten,weildieLadungensichgeradeimKondensatorbefindenunddieSpulekeinMagnetfelderzeugt.Abb.20 istwieeineAnimationzuverstehen, die man sich aus acht aufeinanderfolgenden Bildern zusammengesetzt denken sollte,sodassnachAbb.8derVorgangwiederzyklischbeiAbb.1weitergeht.
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 31 von 67
DieBeschleunigungderRotationdesMagnetenwird solange fortgesetzt,wiediePhasendifferenzzwischender PositiondesMagneten undden schwingenden Feldern im LCSchwingkreis aufrechterhaltenbleibt.
Abb.20:Drehung eines Magneten in derSpule eines LCSchwingkreises mitkonstant gehaltener Phasendifferenz zwischen Rotation undelektrischerSchwingung.
WrdederMagnetdauerndbeschleunigtwerden,abernichtabgebremst,sowrdedieDrehzahlderRotation des Magneten bald die Schwingungsfrequenz des LCSchwingkreises erreichen.EntsprechendwrdediePhasenverschiebungzwischenderelektrischenSchwingungimLCSchwingkreisunddermechanischenDrehungbaldverschwinden,sodasskeineBeschleunigungdesdrehendenMagnetenmehrstattfindenkann.ManbetrachtehierzuAbb.21.Wir sehen dort in BildTeil Nr.1 eine leichte Beschleunigung des Dauermagneten (durch einschwachesMagnetfeldinderSpule),diedurchdasAbbremsendesDauermagneteninBildTeilNr.3exaktkompensiertwird. IndemjenigenMoment (BildTeilNr.2), indemdasMagnetfeldderSpuleseinenMaximalwerterreicht,kanneskeinDrehmomentaufdenDauermagnetenausben,dadieserbereitsexaktnachdemMagnetfeldderSpuleausgerichtetist.MitanderenWortenheitdas,dassinSummeberdieBildTeileNr.13keinDrehmomentaufdenMagnetenausgebtwird.AuchinBildTeil Nr.4 beobachten wir kein Drehmoment auf den Dauermagneten, weil hier die gesamteFeldenergieimKondensatorvorliegtundnichtinderSpule.(HieristdieSpuleohneMagnetfeld.)Die
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 32 von 67
selbe Argumentation, die wir nun von den BildTeilen Nr.14 kennen gelernt haben, knnen wirnochmals bei den BildTeilen Nr.58 wiederholen. In diesem Betriebszustand des RaumenergieKonverters hat der rotierende Magnet mit seiner Drehzahl die Schwingungsfrequenz des LCSchwingkreises eingeholt und kann diese nun nicht berholen, weil kein beschleunigendesDrehmomentmehrvorhandenist,welchesdemDauermagnetenRaumenergiezufhrenknnte.
Abb.21:Drehung eines Magneten in derSpule eines LCSchwingkreises mitverschwindender PhasendifferenzzwischenRotation und elektrischerSchwingung.Aufgrund mangelnder mechanischer Belastung holt die RotationdesDauermagnetendieelektrischeSchwingungimLCSchwingkreisein,so dass keine Raumenergie mehrgewandeltwird.DerZustandfhrtschlielichzuderErkenntnis,dassohnemechanischeLeistungsentnahme auch keine elektrische Leistungsentnahme mglichist.
DieTatsachedassderdrehendeMagnet(auchohnemechanischeBelastung)dieSchwingungimLCSchwingkreisniemalsberholenkann,verhindertdieUnfallgefahrdurchberhhteDrehzahl,weilbeim Verschwinden der Phasenverschiebung keine Raumenergie mehr gewandelt werden kann(auerdemjenigenAnteil,derbentigtwird,umdieDrehzahlgegendieReibungkonstantzuhalten).Aber um Raumenergie zu wandeln, muss man eine positive Phasenverschiebung nach Abbild 20aufrechterhalten.DieoptimalePhasenverschiebungentsprichtmit45genauderSituationinAbb.20.Da dies auf elektrischem Wege (also alleine durch den elektrischen Schwingkreis) nicht erreichtwerdenkann, isteinemechanischeBelastungderRotationntig.Manmussalsoden rotierendenDauermagneten mit einem mechanischen Drehmoment belasten, um eine endlichePhasenverschiebungzwischenderRotationdesMagnetenundderSchwingung imLCSchwingkreisaufrechtzuerhalten.
Bauanleitung eines Raumenergie-Motors nach realittsnaher DFEM-Berechnung, C. Turtur Seite 33 von 67
IndieserHinsichtverhltsichderRaumenergieMotorgrundstzlichvlligandersalseineklassischeelektrische Maschine. Wenn man leicht laufende Lager hat, und die Rotation praktisch ohnemechanische Belastung stattfindet, kann derMotor praktisch keine oder fast keinemechanischeLeistungundauchkeineoderfastkeineelektrischeLeistungerbringen.AlleineschwergngigeLagerwrdenschondieWandlungvonRaumenergiebegnstigen.Besser als schwergngige Lager eignet sich natrlich einemechanische Energieentnahme aus derMagnetRotation,diemanimIdealfallsogardurcheineRegelungderartbeeinflussenkann,dasssicheinlangzeitstabilerBetriebdesRaumenergieMotorserreichenlsst.DiemechanischeLeistungsentnahmekannmanz.B.anderDrehzahldesMagnetenausrichten,oderanderPhasenverschiebungzwischenderMagnetrotationundderSchwingung imLCSchwingkreis.Entscheidenwirunsz.B