Embed Size (px)
Citation preview

Beiträge zur Nicht-Euklidischen Geometrie. I. II. III.Author(s): E. StudySource: American Journal of Mathematics, Vol. 29, No. 2 (Apr., 1907), pp. 101-167Published by: The Johns Hopkins University PressStable URL: http://www.jstor.org/stable/2370031 .
Accessed: 15/05/2014 00:20
Your use of the JSTOR archive indicates your acceptance of the Terms & Conditions of Use, available at .http://www.jstor.org/page/info/about/policies/terms.jsp
.JSTOR is a not-for-profit service that helps scholars, researchers, and students discover, use, and build upon a wide range ofcontent in a trusted digital archive. We use information technology and tools to increase productivity and facilitate new formsof scholarship. For more information about JSTOR, please contact [email protected].
.
The Johns Hopkins University Press is collaborating with JSTOR to digitize, preserve and extend access toAmerican Journal of Mathematics.
http://www.jstor.org
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Beitrage zur Nicht-Euklidischen Geometrie. I. II. III.
VON E. STUDY.
Unter gemeinsamein Titel denkt der Verfasser eine Reihe von Untersuchungen iuber die algebraische und Differentialgeometrie im Nicht-Euklidischen Raume herauszugeben, einen Gegenstand, der ihn schon seit Jahren beschbftigt hat, ohne dass es doch zu einer mehr als skizzenhaften Veroffentlichung gekommen wiire.
In dem ersten der vorliegenden drei Beitrage wird eine anscheineud neue Eigenschaft der geraden Linie erortert. Die zweite Abhandlung ist von der ersten unabhangig. Sie ist iuberschrieben: Die Begriffe links und rechts*), es werden aber darin auch andere Grundbegriffe der Nicht-Euklidischen Geometrie behandelt. Sie ist als Einleitung zu weiteren Arbeiten gedacht, und deshalb ele- mentar gehalten. Sie kann vielleicht auch zur Einfiihrung in die Methoden dienen, die der Verfasser in seiner Geometrie der Dynamen (Leipzig, 1903) an- gewendet hat. Die dritte Mittheilung enthilt eine einfache Anwendung auf die Sehraubenflilchen im Nicht-Euklidischen Raume positiver Kriimmung, die als geodatische Linien in einer vierfach ausgedehnten Mannigfaltigkeit betrachtet werden.
Gerade und Punkt als Extreme.
Es scheint noch nicht beachtet worden zu sein, dass der Satz von der Geraden als kiirzestem Weg zwischen zwei Punkten in der hyperbolischen Geometrie zwei Analoga hat, bei denen der Punkt bemerkenswerther Weise nicht als kiirzester, sondern als Ictngster Weg zwischen zwei Geraden erscheint.
Erganzen wir in bekannter Weise das Punktcontinuum der Lobatschewsky'- schen Geometrie durch Zufiigung unendlich ferner und sogenannter idealer
) Bei einer anderen Gelegenheit denken wir noch zu zeigen, dass ein Theil vom Inhalte der Begriffe links und
rechts zu seiner Entwickelung den Maassbegriff nicht erfordert, sondern der reellen projectiven Geometrie des Raumes angehort.
14
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

102 STUDY: Beitra,ge zur Nicht-Euklidischen Geometrie. I.
Punkte zum Punktcontinuurn der projectiven Geonmetrie, so kann man diese natiirlich noch pracise zU fassende Behauptung auch in der correlativen Form aussprechen: Die Gerade oder vielmehr emn Stilck einer Geraden erscheint als 1dmngster Weg zwischen zwei Punkten.
Wir betrachten zunachst die ebene Geometrie, vom Kriimmungsmaasse - 1, gehorig zu dem absoluten Polarsystem
(xy) = XlYl - X2Y2-X3y3 0. (1)
Wir kdnnen dann die - hier stets als positiv 0 _ betrachtete - Entfernung zweier Punkte im Inneren I (x x) > 0, (y y) > 0 des absoluten Kegelschnittes eindeutig erklkiren durch die Formel
(x, y) =arccos hx (X ( , (2)
wofern wir dem Wurzelzeichen und der Function arc cos h den positiven Werth beilegen. Dieselbe Formel liefert aber eine reelle ,,Entfernung" der Punkte x, y auch noch in dem Falle, wo diese auserhalb des absoluten Kegeischnittes und zwar so gelegen sind, dass ihre gerade Verbindungslinie den absoluten Kegel- schnitt trifft. Ueberdies besteht auch in diesem Falle fur drei Punkte y, x, z in gerader Linie, deren mnittlerer x die beiden anderen trennt, die Gleichung
(y, z)=(y, x) + (x, z) (3)
Wir wollen nun ein Dreieck x, y, z von verschiedenen autsserhalb gelegenen Punkten so annehmen, dass die Verbindungslinie von je zweien den absoluten IKegel- sc/nitt trift; derart also, dass
(y z)2 (yy) (z z)>, 0 (XX) <?,
(z X), - (Z Z) (XX) > 0,y (YY) < 0, (4)
(xy)2 (xx) (yy) _ 0, (Z Z) < 0.
Tir konnen dann zwei Familien solchler Dreiecke unterscheiden: Ist
(yz) (zx) (xy) < 0, (5a)
so ist die grosste Seite der Dreiecks x, y, z immer grosser als die Summe der beiden anderen, oder mindestens dieser Summe gleich. Und zwar tritt der Fall der Gleich- heit dann und nur dann ein, wenn die drei Punkte in gerader Linie liegen.
Ist dagegen (yz) (zx) (xy) > 0, (5b)
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Gerade und Punikt ale Extreme. 103
so kann die grosste Seite grosser oder k7einer als die Summe der beiden anderen sein, oder auch dieser gleich. Niemals aber liegen dann die drei Punkte in gerader Linie.
Nehmen wir an, es sei
(y, z) ' (y, x), (y, z) ' (x, z), (6)
und fragen wir, unter welchen Veraussetzungen wir schliessen k6nnen, dass
(Y, Z) _ (Y, x) + (x, Z) (7a) sein muss.
Die Ungleichung (7a) konnen wir offenbar auch so schreiben:
cosh {(y, z) -(y, x) _ cos h (x, z).
Ldsen wir hier mit Benutzung des Additionstheorems den hyperbolischen Cosinus links auf, so nimmt diese Ungleichung, bei positiven Werthen aller vorkommenden Wurzelgrossen, die Form an:
V (yz)2 V/(xy)2 + (yy) oV (xz)2 V(yz)2 - (yy) (zz) / (xy)2 - (xx) (yy).
Hier sind nun nach Voraussetzung (4) und (6) beide Seiten positive Grossen. V6llig aquivalent mit der letzten Ungleichung ist also die aus ihr durch Quad- riren entstehende:
(xx) (yy) (zz) - 2 V (yz)2 I /(zx)2 V/ (xy), -
(xx) (yz)2 -
(yy) (zx)2 -
(zz) (xy)2 > 0
Anderseits ist
(xx) (yy) (zz) + 2 (yz) (zx) (xy) - (xx) (yz)2 - (yy) (zx)2 - (zz) (xy)2 I 0,
weil die linke Seite das Quadrat der Determinante (xyz) darstellt. Wenn also die Ungleichung (5a) stattfindet, so fallen die beiden letzten Ungleichungen zusammen, und es ergiebt sich (7a). Sie bestehen beide als Gleichungen, wenn (xyz) = 0 ist. Der umgekehrte Schluss aber, dass aus (7a) auch (5a) folgen miusste, kann nicht gezogen werden.
Nehmen wir jetzt an, dass (5b) stattfindet, so wird behauptet, dass
(Y, z) - (Y, x) + (x, Z) (7b)
sein kann, oder, nach Obigem, dass (bei Annahme der Ungleichungen (6) ent- sprechend)
(xyz)2 - 4 (yz) (zx) (xy) > 0
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

104 STUDY: Beitrige zur Nicht-Euklidischen Geometrie. I.
sein kann. In der That iuberzeugt man sich hiervon sebr leicht durch Beispiele, oder durch eine sogleich vorzufiihrende Ueberlegung. Dass (xyz) in diesem Falle nicht verschwinden kann, ergiebt sich daraus, dass dann in (7b) das Gleichlheits- zeichen gelten muisste. Dann m-iisste also - da (xyz) _ 0- das Product (yz) (zx) (xy) verschwinden, was nach (4) unmoglich ist.
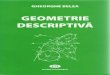
Um eine deutliche Vorstellung von den zugeh6rigen Dreiecksfiguren zu er- halten, wollen wir die Punkte y, z als gegeben annehmen. Man sieht leicht, dass dann die Gesammtheit der Punkte x, die den Ungleichungen (5a) oder (5b) geniflgen, dargestellt wird durch die in der Figur (1) schraffirten Gebiete.
+
_~~~~ ~ ~ _______ l--n
FIG. 1.
Verticale Schraffirung besagt, dass
(yz) (zx) (xy) > 0, horizontale, dass
(yz) (zx) (xy) < 0
ist. Figur (2) zeigt sodann ebenfalls durch verticale und horizontale Schraffen
an, wo (y, z) -(y, x) - (x, z) > 0, oder (y, z)-(y, x)- (x, z) 0 ist.
Diese Figur zeigt ausserdem, stark ausgezogen, den Ort aller Punkte x, firl die
(y, z) (y, x) - (x, y) = 0
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Gerade und Punkt als Extreme. 105
ist. Dieser Ort bestehtt aus drei vollig getrennten Linienziigen, deren einer gerade ist, wahrend die beiden anderen der Curve 2. Ordnung
(yzx)2 - 4 (yz) (y.x) (zx) = 0 (8)
angehlren. Diese Curve beriihrt zunachst die Polaren der Punkte y,z, die Geraden (y x) = 0 und (z x) = 0, in ihren Schnittpunkten mit (y z x) 0. Bildet man sodann, unter Verwendung der Bezeichnungen
(UX) =U1X1 + U2X2 + U3X3, (UV) =Ui V1 - U2V2 - 3 V3
ihre Gleichung in Liniencoordinaten, so findet sich, nach Abspaltung des nicht
JI
FIG. 2.
verschwindenden Factors 4 (y z) (y Z)2 _ (y y) (Z Z) von der quadratischen Co- variante des Ausdrucks (8), die Gleichung
(YZ) (uut) - (uy) (uz) 0 . (9)
Man sieht also, dass die Curve (8) die Minim algeraden durch y, z- die von y, z an den absoluten Kegelschnitt gehenden Tangenten - beriuhrt, natiirlich in re- ellen Punkten. Schliesslich geht durch die beiden Beriihrungspunkte der Curve (8) mit den von z ausgehenden Minimalgeraden der in der Figur nicht gezeichnete, aber leicht zu ergiinzende Ort (y, x) = (y, z). Die Gebiete innerhalb der Curven (y, x) (y, z) und (z, x) = (y, z) gehoren dann zu den Ungleichungen (y, z) < (y, x) 11nd (y, z) < (z, x), werden also horizontal zu schraffiren sein. Die Curve (8) aber
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

106 STUDY: Beitrage zutr Nicht-Euklidischen Geometrie. I.
wird, soweit sie ausserhalb dieser Gebiete verliuft, die beiden Arten der Schraf- firung trennen. Man sieht nun ohne Muihe, dass die Schraffen richtig eingetragen sind, wenn man x auf den Randeurven der verschiedenen Gebiete laufen Iasst.
Zu grosserer Deutlichkeit fiugen wir noch - in collinearer Abanderung eine dritte Figur hier an, die zeigt, wie bei gegebenem x die Punkte y und z
Vx
FIG. 3.
liegen mrissenl, wenn gleichzeitig
(yz) (zx) (xy) < 0, (yz) ' (y, x) + (x, Z) (10) sein soil.
In diesem Falle, der nun noch na11her betrachtet werden soll, werden wir sagen: ,,Der Punkt x trennt die Punkte y und z," oder auch: ,,Der Pun/ct x liegt zwi,schen y und z." Wenn unter den Verbindungslinien der Punkte x, y, z keine Minimalgerade vorkornmt, haben dann die Polaren der Punkte x, y, z eine solelie gegenseitige Lage, wie sie durch Figur 4a) aingezeigt wird; wahrend die Dreiecke der zweiten Familie der Figur 46) entsprechen.
FIG. 4a. FIG. 4b.
Um nicht zu sehr ins Breite gehen zu miussen, entnehmen wir nunmehr der Anschauung (Fig. 4a), oder einer nahe liegenden Continuitiatsbetrachtung, die folgenden Satze:
Liegt der Punkt x' zwischen y und z, und der Pun/t xl zwischen (y utnd xl oder) xi und z, so liegt xv' auch zwischen y und z.
Liegen zwei verschiedene Punkte zwischen den Punkten y, z, und zwar so, dass
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Gerade und Punkt als Extreme. 107
ihre gerade Verbindungslinie den absoluten Kegelschnitt trifft, so haben alle vier Punkte eine bestimmte Anordnung y, x', x"', z oder z, x", xI y.
Es lieyt namlich nach geeigneter Wahl der Bezeicihnung x' zwischen y und xll, und x'" zwischen x' und z, aber nicht x" zwischen y und xz, und nicht x' zwisclhen xl' und z.
Liegt ferner der Punnkt x zwischen zwei solchen Punnkten x' und xc', so lieyt x auch zwisclhen y und z.*)
Die Art, wie diese Satze zu Stande kommen, wird wohl hinreichend durch die beiden Figuren 5 erlautert. Man schliesst daraus ohne Muihe den folgenden bemerkenswerthen Satz:
FIG. 5.
Es sei vorgelegt eine Menge von Punzkten ausserhalb des absoluten Kegelschnittes, die emn CONTINUUm bildet, und ausserdem so beschaffen ist, dass die gerade Verbindungs- linie von je zwei verschiedenen Punkten der Menge den absoluten Kegelschnitt trift.
Jeder beliebige Punkct der Menge, mit Ausnahme von h65chstens zweien yo, ZO, hat dann die folgende Eigenschaft: Nimmt man diesen Punkct x aus der Menge herauts, so bilden die iibrigen Punkte der MlIenge zwei ebenfalls continuirliche ZTheil- mengen (y) und (z), derart, dass x alle Punkte y der einen trennt von allen Punkten z der anderen.
Alle Punite der Menge zwisclhen zwei verschiedenen y, z bilden naclh Zufilgung von y und z selbst einen abgeschlossenen continuirlichen Curvenzug, dessen Punkte x eindeutig-umke hrbar und stetig den Werthlen eines Parameters t von Null bis Eins zugeordnet werden k65nnen.
*) Dieses Alles wurde sich strenge, aber, soviel wir sehen, nicht ganz kurz, mit rein algebraischen Mitteln
beweisen lassen. - Wo es sich nicht um Fundamentalsaitze grosser Theorieen handelt, diirfen wohl auch ab-
kurzende Darstellungsformen angewendet werden, wenn es nur mdglich ist, die entstehenden Liicken im Bedarfs-
falle ausznfiullen.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

108 STUDY: Beitrdge zur Nitcht-Euklidischen Geometrie. I.
Dieser Catrvenzug hat eine v&llig bestiminte Lange S, die den Ungleichungen
geniigt. Ferner ergiebt sich: Sind zwei Ausnahmspunkte yo, zo der bezeichneten Art
vorhanden, so besteht die ganze Menge aus diesen Punkten selbst und einem sie verbindenden Curvenzug von bestimmter Bogenlange, dessen sammtliche von
yo, zo versehiedene Punkte zwischen yo und zo liegen. Die im Satze genannten Punkte y, z erhalten irnmer die Eigenschaft solcher Grenzpunkte Yo, Zo, wenn man alle von y, z verschiedenen Punkte der Menge unterdriuckt, die nicht
zwischen y und z liegen.
FIG. 6.
Nennen wir nun einen Curvenzug, wie er im Satze beschrieben ist, einen
TFeg zwischen y und z, so haben wir das Eingang,s bezeichnete Resultat. Unter allen Wegen zwischen zwei verschiedenen Punkten y, z, die ausserhalb des
absoluten Kegelschnittes liegen, und deren gerade Verbindungslinie diesen trifft, ist der gerade Weg der langste.
Hierzu geh6ren als eine niutzliche Ergiinzung die weiteren Bemerkungen: Ist dte gerade Verbindungslinie der Punklte y, z eine linimalgerade, d. h., be-
ri6hrt sie den absoluten Kegelschnitt, so giebt es nur den einen auf ihr selbst gelegeenen
Weg zwischen beiden Punk-ten. In jedem anderen Falle giebt es unbegrenzt viele Wege zwischen J, z, und in be-
liebiger Na1he irgend eines von ihnen insbesondere noch unbegrenzt viele, die die Laenge Null haben.
Die Figur 6 macht es anschaulich, wie ein Weg zu Stande kommt, der in beliebiger Niahe des langsten liegt, selbst aber die Lange Null hat.
Fur die Punkte einer Geraden, die den absoluten Kegelschnitt nicht trifft, also ganz im idealen Gebiete verlaluft, konnen wir eine elliptiscele Maassbe-
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Gerade und Punkct als Extreme. 109
stirnmung festsetzen. Die Entfernung zweier Punkte x, y auf einer solchen Ge- raden wird dann nur bis aufs Vorzeichen und bis auf ein Multiplum einer ge- wissen Periode bestimmt sein, die gleich t angenommen werden darf. Wir wiihlen unter den verschiedenen Werthen dieser Function den absolut-kleinsten aus, betrachten ihn als eine positive Grosse, und bezeichnen diese mit (x, y). In- dem wir fur alle vorkommenden Wurzelgrdssen auch bier deren positive Werthe setzen, haben wir dann die Gleichung
cos (X,)=4 (xy), (10) X ~ (X X) (yy)' und es ist immer
O_cos(x, y)_ 1.
Dieselbe Formel (10) k6nnen wir dann auch noch in dem Grenzfall gelten lassen, wo die x, y enthaltende Gerade den absoluten Kegelschnitt beriuhrt, aber weder x noch y in den Beriihrungspunkt fillt. Wir setzen dann (x, y) = 0.
Wir wollen nun zeigen, dass die so erkliirte Entfernung (x, y), ebenso aber auch ihr Supplement
[x, y] = 7t- (x, y)
gleichfalls die Eigenschaft hat, ein azximum zu sein unter den LaTngen gewisser noch zu definirender ,,Wege" zwischen den beiden Punkten.
Wir betrachten wieder ein Dreieck x, y, z von verschiedenen idealen Punkten, deren gerade Verbindungslinien aber nunl den absoluten Kegelschnitt entweder gar nich2t treffen oder hlich8tens ber " ren sollen:
(y Z)2_- (yy) (z z) < 0, (xx) < ?2
(zX)2-(zZ) (xx) <0, (8y)< 0, (1)
(Xy)Z- (xx) (yy) 0, (z z) < 0.
Ohne eine Beschrankung einzufuhren, diirfen wir dann annehmen, dass
7t > > 0 ~~~~~~~~~(12) 2 -(,Z Y z) X) (x, z 12
sei. Die der Reihe nach hypothetisch anzunehrnenden Ungleichungen
(z, Z) (y, X) + (X, Z) (13)
lassen sich dann so schreiben:
cos (x, z) - cos (y, z) cos (y, x) >
sin (y, z) . sin (y, x).
15
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

110 STUDY: Beitr+ge zur Nicht-Euklidischen Geometrie. L.
Da hier nach Voraussetzung beide Seiten positive Grossen sind, so erhialt man durch Quadriren iaquivalente Ungleichungen,
(xx) (yy) (zz) - 2 V/ (yz)2 (zx)2 (xy)2
- (xx) (yz)2 - (yy) (zx)2 - (zz) (xy)2_ 0.
Wie zuvor sieht man jetzt, dass nur das obere Zeichen oder das Gleichheits- zeichen iodglich ist, wenn
(yz) (zx) (.zy) < O, ( 1 4sa) wahrend im Falle
(yz) (zx) (xy) > 0 (14b)
eine Entscheidung nicht getroffen werden kann.
FI G. 7.
Es wird geniigen, wenn wir die leicht zu behandeinden Grenzfaille
(y, z) - 7t
- [y, z] und (y, - //[y,z=
weiterhin zuniichst ausschliessen und also annehmen, dass
sei.2 Die beiden Abschnitte, in die die Gerade yz durch die beiden Punkte y, z
zerlegt wird, sind null jeder Diagonale eines einfachen Vierseits, dessen Seiten Stiicke von Miniinialgceraden sind. (S. die Figur 7).
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Gerade utnd Punkt als Extreme. 111
Im Inneren oder an der Grenze dieser beiden Vierseite liegen alle den Un-
gleichungen (11) genfigenden Punkte x. Beide Vierseite haben iin Uebrigen ver- schiedene Eigenschaften. Bei geradliniger Erstreckung des Integrals fiber das Bogenelement zwischen y und z durch das Innere des einen Vierseits hindurch entsteht der kleinere Werth (y, z), bei Erstreckung durch das andere Vierseit der grdssere [y, z]. Das erste, wie wir der Bequemlichkeit halber sagen wollen, ,,kleinere" Vierseit liegt ganz im Gebiete (yz) (zx) (xy) < 0; das andere ,,grossere" wird durch die absoluten Polaren der Punkte y, z in drei Abschnitte zerlegt, zwei iiussere, in denen ebenfalls (y z) (z x) (x y) < 0 ist, und einen inneren, in dem (y z ) (z x) (x y) > 0 ist. Weiter erkennt man - aihnlich wie ztivor dass der Ort aller Punkte x, fudr die
(y, z) = (iy, x) + (x, z) (15)
ist, aus drei getrennten Curvenziigen besteht. Der eine von diesen ist gerade, und verliauft ganz im kleieeren Vierseit. Die beiden anderen liegen auf der irre- ducibilen Curve 2. Ordnung
(yzx)2 - 4 (yz) (zx) (xy) = 0 (16)
und verlaufeni ganz im gr6sseren Vierseit. So erhalt man schliesslich eine Ein- sicht in die Vertheilung der Gebiete fuir x, in denen
(y, z) - (y, x) - (x, z) > 0
ist und der anderen, in denen
(Y, z) - (y, x) - (x, z) 0
ist: Die ersten werden in der Figur 7 durch verticale Schraffen, die zweiten, oder vielmehr das zweite Gebiet, durch horizontale Schraffen bezeichnet.
Nunmehr ergiebt sich, ganz wie zuvor im Falle hyperbolischer Maassbe- stimmung, der Begriff eines Weges zwischen y und z, der in dem kleineren Vierseit verlhuft, und der Satz, dass unter allen diesen Wegen der gerade der langste ist. Wir behaupten aber weiter, dass in dem grosseren Vierseit dieselben Beziehungen gelten. Das heisst, wir behaupten, dass in deni Dreieck y, x, z die Lange der Seite yz nicht kleiner ist als die Summe der Larngen der beiden anderen Seiten, wenn x in dem grosseren Vierseit liegt, und wenn alle dre- Liingen durch das geradlinig erstreckte Integral fiber das Bogenelement so erkliart sind, dass der Integ,rationsweg das grossere Vierseit nicht iiberschreitet.
Man erkennt ohne Schwierigkeit, dass mnan bei deim Beweise dieser Be- haupturig drei Fiille zu unterscheiden hatt.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

112 STUDY: Beitrage zur Niclt-Euklidischen Geometrie. I
1) Der Punkt x liegt in dem mnittleren der oben untersehiedenen Theilgebiete des grosseren Vierseits (oder an dessen Grenze). Dann ist (yz) (yx) (zx)> O; die drei Langen sind [y, z], (y, x) und (x, z); die Behauptung ist
[y, z] - (y, x) + (X, Z).
2) und 3). Der Punkt x liegt in einem der ausseren Theilgebiete - z. B. in dem, das von der Polare des Punktes y abgeschnitten wird, oder so, dass (y, x) (x, z). Dann ist (yz) (yx) (zx) 0, die drei Liingen sind [y, z], [y, x], (x, z), und die Behauptung ist
[yz] > [y, x] + (x, z), oder
(y, x) > (y, z) + (z, x).
Der Beweis ergiebt sich in allen Fallen durch die schon mehrfach ange- wendete Schlussweise.
Indem wir nun das erhaltene Resultat formuliren, werden wir uns kiirzer fassen als zuvor, und in Wesentlichen nur hervorheben, was den gefundenen Satz vorin vorigen unterscheidet.
Die verwendete Art der Maassbestimmung bezeichnen wir als pseudo-ellip- tisch deshalb, weil sie mit einer gewohnlichen elliptischen im positiven Krim- mungsmaasse (+ 1) fibereinstimmt, sich aber von ihr durch das Vorhandensein reeller Wege von der Lainge Null wesentlich unterscheidet. Unter Verwendung dieser Terrninologic konnen wir dann sagen:
Sind y, z zwei verschiedene Punkte, deren gerade Verbindungslinie den ab- soluten Kfegelschnitt nicht trifft, so gibt es zwei Familien von directen Wegen zwischen y und z.
Es giebt namlich zwei von Minimalgeraden begrenzte einfache Vierseite, in denen y und z gegeniderliegende Eckeen sind. Im Inneren oder an der Grenze je eines dieser Vierseite verlaufen die Wege der einen oder anderent Familie.
Unter allen Wegen derselben Familie ist bei pseudo-elliptischier Maassbestimmung der gerade der langste.
Jeder directe Weg ist ein Curvenstiuck von bestimmter Bogenlange, dessen siimmtliche Sehnen den absoluten Kegelschnitt entweder gar nicht treffen oder h6chstens beriihren. Er wird durch irgend einen seiner Punkte x, der von y und z verschieden ist, in zwei Wege von gleicher Eigenschaft zerlegt. Wenn in dem zuvor ausgeschlossenen Grenzfall y und z ideale Punkte bleiben, aber die Gerade yz den absoluten Keegelschnitt bertihrt, so giebt es einen ,,eigentlichen" und einen ,,uneigentlichen" directen Weg zwischen y und z. Beide sind gerade.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Gerade und Punkt als Extreme. 113
Der erste verhiuft ganz ausserhalb des absoluten Kegelscbnittes; er hat die LUnge Nuill. Die Lange des zweiten Weges ist nicht eigentlich definirt, darf aber -=t gesetzt werden.
Ein Curvenstilek kann die Eigenschaft haben, dass sich urn jeden seiner Punkte herum ein Gebiet abgrenzen lasst, in dern das Curvenstuick directer Weg ist zwischen je zweien seiner Punkte y', z', ohiue dass ihm im Ganzen nothwendig dieselbe Eigenschaft zukarne. Fir solche Curvenstileke, die zwei gegebene Punkte y, z verbinden, gilt dann der letzte Satz nicht rnehr. Im Gegentheil kann man offenbar zwei ganz beliebige ideale Punkte - also auch solche, deren gerade Verbindungslinie den absoluten Kegelschnitt in getrenuiten Punkten schneidet - durch solche Curvenstilcke verbinden, deren Liange eine beliebig ge- gebene Zahl uibertrifft. Die Lange des directen Weges zwischen Punkten y, z-
falls es einen solchen Weg gibt -ist also in viel beschrankterem Sinne Maxi- mum als die zuvor betrachtete Wegelinge bei hyperbolischer Maassbestimmung.
Da die Einfiihrung der sogenannten idealen Punkte in die Geometrie Lobatschtewsky's nicht gerade eine Nothwendigkeit ist, so vird vor der hier ge- wahlten Ausdrucksforin der aufgestellten Satze unter Uinstanden den Vorzug
verdienenl eine andere, bei der jene Begriffsbildung vermieden wird. Natuirlich Iisst sich die Uebersetzung aus einer Sprache in die andere ohne Weiteres aus- fiihren. Zum Beispiel lautet der Satz, der unserer ersten Reihe von Be-
trachtungen zu Grunide liegt, nunimehr xvie folgt: Wenn von drei Geraden y, x, z, die zat zweien entweder parallel oder utltraparallel
sind, die mittlere die beiden anderen trennt, so ist die Lange der gemeinsamen Nor- male zwischen y und z grosser als die Sum me der Leingen der Normalen zviechen y, x und x, z, oder mindestens dieser Samme gleicit.
Der Fall der Gleichheit tritt ein, wenn alle drei Geraden eine geineinsame Senkrechte zulassen, oder, im Grenzfall, parallel sind. ,,Lange der gemeinsamen Normale zwischen y, z" heisst natiurlich, wenn y, z ultraparallel sind, die Lange der kilrzeeten Verbindungslinie zwischen einiem Punkte von y und einem Punkte von z, und, im Grenzfalle des Parallelisinus, die Null. Alles Weitere ergiebt sich von selbst: Der ideale Schnittpunkt von zwei ultraparallelen Geraden y, z oder seine Polare, die gemeinsame Senkrechte von y, z, betrachtet als Ort der zu ihr senkrechten Geraden, erscheint nun als ldngster Weg zwischen diesen beiden Geraden.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

114 STUDY: Beitrage zur Nichlt-Euklidischen Geometrie. I.
In 'aihnlicher Weise kann man unseren zweiten Satz mlit seiimen Folgerungen iubertragen. Die grundlegende Thatsache erweist sich in diesern Falle als nicht verschieden von dem bekannten Satze fiber die Dreieckswinkel, der etwa so ausgesprochen werden kann:
,,In jedem gewohnlichen Dreiseit ist irgend ein Aussenwitikel grosser als die Summe der beiden Innenwinkel, die der dem Aussenwinkel gegeniuberliegenden Seite anliegen, oder er ist mindestens dieser Summe gleich. Und zwar tritt Gleichheit dann und nur dann ein, wenn die drei Seiten durch einen Punkt gehen."
Es ist minder anschaulich, mit Geraden und ihren Winkeln, als mit Punkten und ihren Entfernungen zu operiren; im ersten Falle hat nman nicht wie im zweiten ein leitendes Princip in analogeni Verhiiltnissen der Euklidiseben Geo- metrie; und darin liegt jedenfalls der Grund dafir, dass man diesem langst be- kannten Satze noch nicht die Wendung gegeben hat, auf die es uns hier ankommt (falls in der That die Sache neu sein sollte). Aber wenn wir hier die gerade Linie als - wenn auch nur sehr relatives - Maximum hinstellen, so handelt es sich gewiss um eine Thatsache, die in einem vollstandigen System der Nicht- Euklidischen Geometrie nicht fehlen sollte. Ueberhaupt darf es, wie uns scheint, einmal gesagt werden, dass die Entwickelung der Nicht-Euklidischen Geometrie selbst in sehr elementaren Dingen noch ganz unvollstindig ist. Die Lobat- schewsky'sche Trigonometrie z. B. ist gewiss ein besonders wichtiges Bruchstick, aber immer nur ein Bruchstiuck: Dreiecke mit ganz oder theilweise ultraparallelen Seiten, insbesondere die den ersten entsprechenden Sechsecke mit lauter rechten Winkeln, mfissen auch betrachtet werden in einem System, das einigen An- spruch auf Vollstandigkeit erheben will. Auch dem Vorhandenen fehlt noch die feinere Durchbildung, das Studium der zugeh6rigen Gruppen, der Zusammen- hang mit der Invariantentheor'ie u. s. w., obwohl die Hillfsmittel zu solchen Untersuchungen lngst ausgebildet sind.*)
Fragen wir nunmehr nach einer etwanicgen Ausdehnung der abgeleiteten Siitze auf eine beliebige Dimeensionenzahl, so zeigt sich eine bemerkenswerthe Verschiedenheit der skizzirten kleinen Theorien.
*) Die in der Litteratur vorhandenen Methoden und Formeln sind fur solche Zwecke v6llig ausreichend. S. W. facobsthal, Art. Trigonometrie in der Encyclopoodie der elementaren Geometrie (Leipzig, 1905) und E. Study Spharische Trigonometrie etc. (Abh. d. Sachs. G. D. W. Leipzig,, 1898). Geometrie der Dynamen, Leipzig, 1903, S. 209-212
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Gerade und Punkt als Extreme. 115
Unser erster Satz iuber die Gerade als langsten Weg lsst sich auf eine unbe- stimmte Dimensionenzahl ausdehnen, der zweite ist auf die Ebene beschrankt.
Ist namlich das absolute Polarsystem gegeben durch
(xy) = xly1- x222 * y - XnYn- = O
so konnen wir zunachst zwei ausserhalb des absoluten Punktgebildes (xx) = 0 gelegene Punkte y, z so annehmen, dass ihre gerade Veirbindungslinie dieses Ge- bilde trifft. In jeder Ebenle durch die Gerade yz erhalten wir dann die zuvor untersuchten Dreiecksfiguren. Es entsteht, an Stelle des - bei hyperbolischer Maassbestimmung - erorterten Vierseits ein (n - 1)-dimensionales Raumstiuck,
begrenzt durch StuIcke zweier von y und z ausgehender Conoide,
(yx)2 - (yy) (xx) = 0, (Zx)2 -
(zz) (xx) 0.
,,Wege" in diesem Raumstfick sind im Wesentlichen so zu definiren, wie zuvor, nur brauchen sie nicht in Ebenen zu liegen. Der gerade Weg ist unter ihnen allen der langste.
Wenn dagegen die Gerade yz das absolute Punktgebilde nicht trifft, so giebt es drei verschiedene Arten von ebenen Wegen zwisben y, z. Eine Ebene durch y, z kann ztiiiichst das absolute Gebilde in einem reellen Curvenzug durch- dringen. Bei pseudo-elliptischer Maassbestimmung zeigt sich (y, z) oder [y, z] als Maximum zuniachst unter geeigneten gebrochen-geradlinigen Wegen. Sodann kann die Ebene das absolute Gebilde beruihren. Man erhalt in diesem Falle, wie sich unschwer einsehen lisst, unendlich viele gleichlange Wege zwischen beiden Punkten. Endlich kann die Ebene das absolute Gebilde gar nicht treffen. Dann wird (y, z) ein Minimum. Es ergiebt sich also, dass die Lange des
geraden Weges in diesem Falie i6berhaupt nicht Extremum ist. Das schliesst natiirlich nicht aus, dass auf einer Mannigfaltigkeit niederer
Dimension, die einer solchen Maassbestimmung unterworfen wird, das Problem der kiurzesten (oder langsten) Liinien doch wieder einen klaren Inhalt bekommen kann. So giebt es im Raume von acht Dimensionen eine Mannigfaltigkeit M4 von vier Dimnensionen, der bei passend gewThlter pseudo-elliptischer Maass- bestinimung die folgende merkwulrdige Eigenschaft zukomnmt:
Die Ldnge des auf M4 selbst gemessenen kiirzesten Weges zwischen zwei Punkten
y, z von M, ist gleich der Lange des geraden Weges zwischen eben diesen Punkten.* Andere Erweiterungen des Vorgetragenen wollen wir nur andeuten.
*) Math. Ann. Bd. 60, 1905, S. 361.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

116 STUDY: Beitrage zitr Nieht-Euklidischen Geornetrie. II.
Aehnliche Extremums-Eigenschaften wie die hier betrachteten werden sich finden bei den geodatischen Linien, die zu einem Bogenelement gehoren, dessen Quadrat durch eine quadratische Differentialform erkliart ist, in dem Falle, wo diese Form fiur die Linienelemente eine hyperboliselie Maasbestimmnung definirt. Ferner kann mlan bei einem Theile der vorausgehenden Betrachtunlgen den Kegelschnitt durch irgend ein Oval ersetzen. Es geh6rt ferner in diesen Ge- dankenkreis z. B. der folgende unschwer zu begriundende aber doch vielleicht nicht ganz uninteressante Satz:
Es moge eine im endlichen Gebiet der Eukliiscchen Ebene gelegene Menge von Punkten erstens ein abgeschlossenes Continuum bilden und zweitens die Eigensc7haft haben, dass alle Sehnen zwischen versceiedenen Pun7cten der Menge mit einer be- stimmrten Geraden Win7cel qp bilden, die einer Ungleichung der Form
tgp j 7M
genilgen. Dann ist diese Punktmenge ein rectificirbares Curvenstuiek, das gewisse zwei Punkte y, z mit einander verbindet.
1st D der Abstand der Projectionen der Punkte y, z auf die genannte Gerade, so ist die Bogenlange des Curvenstuicks liochstens gleich
!DV1 +X21.
II.
Die Begriffe Links und Rechts in der elliptischen Geometrie.
In allen Untersuchungen iuber Nicht-Euklidische Geometrie, die mit der tiefer liegenden Problemeen allein gewachsenen analytischen Methode gefiihrt werden, trifft man gleich bei den ersten Schritten auf gewisse Quadratwurzeln*), deren Vorzeichen eine geometrisehe Bedeutung haben. Diese Deutung, die im Gebrauche solcher Worte wie Richtung, Drehungssinn, links und rechts zum Aus- druck kommt, wird nattirlicll erst moglich auf Grund besonderer Definitionen. Bei diesen hat die Willkuir einen gewissen Spielraum- es handelt sich jedesmal
um eine Entscheidung zwischen zwei logisch-gleichwerthigen Mdglichkeiten. Man kann die nothigen Bestimmungen so zu treffen suchen, dass bei geeignetem Grenziibergang zum Euklidischen Raume die fur diesen bereits ilblichen Erklar- ungen entstehen.
Man sollte meinen, dass Begriffen von so tief einschneidender Bedeutung von vorn herein die grdsste Aufmerksamkeit geschenkt worden wire, dass man
*) Siehe etwa Lindernann, Math. Ann. Bd. VII (1874), S. 56-144.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begrifffe Links und Rechts in der elliptiscken Ceometrie. 117
fur sie sorgf6dtig abgewogene jede Mehrdeutigkeit aussehliessende Erklirungen gegeben haben muisste. Soviel dem Verfasser bekannt, hat man sich jedoch um diese Wurzelvorzeichen in der Regel ulberhaupt nicht gekunmmert, oder man hat Worte so gebraucht, als ob ihnen von selbst ein klarer Sinn zukommnen konnte. Dass unter diesen Umstianden auch der analytische Apparat eines sorgfiiltigeren Studiums und weiterer Ausbildung bedarf, wird einleuchtend sein.- In emd vorliegenden Beitrag betrachten wir insbesondere den dreidimensionalen soge- nannten elliptischen Raum. Hier (oder auch im splharischeii Raum) fin(let die Deutung der erwvvhnten Wurzelgr6ssen eine besonders meikwiurdige Anwendung in einem Uebertragungsprincip, das die Nicht-Euklidische mit der Euklidischen Geometrie in Zusammenhang bringt.
Im Mittelpunkte unserer Darlegung stehen zwei nahe verwandte Begriffe, die im reellen Gebiete nmit einander zusamnmenfallen, und als 8peer und Pfeil bezeichnet werden. Ein reeller Speer oder Pfeil ist eine sogeniannte orient- irte Gerade, oder Gerade mit positiver Richtung.*) Wir werden unter An- derem zeigen:
Bei geeigneter Wald des Rattmelementes (namlich des Sjpeeres oder Pfeiles, nicht aber der geraden Linie) wird die reelle sogenannte elliptische Geometrie v5llig iden- tisch mit der Elementargeometrie der Putnktepaare, die man zwei gleichgrossen Kugeln entnehmen kann.t)
Damit soll natiirlich gesagt werden, dass diese beiden Arten der Geometrie in logischer Hinsicht nicht unterschieden zu werden brauchen, dass sie, vom Standpunkte des Logikers betrachtet, ein einziges System bilden. Aber wir behaupten auch - was uns ungleich wichtiger zu sein scheint - dass dieses System von Begriffen und Lehrsatzen sich auf sehr verschiedene Arten, und zwar an bemerkenswerthen Stellen, in das Ganze der Geomietrie einiiigt.
*) In der Euklidischen Geometrie hat man derartige Figuren betrachtet, seit man negative Grossen zu ge- brauchen gelernt hat. Von Molius, Laguterre, Stephanos, Lie und Anderen sind sie vielfach verwerthet worden.
Die Methode des Verfassers unterscheidet sich von denen seiner Vorganger unter Anderem dureh die Darstellung dieser Figuren durch besondere und zwar homogene Coordinaten.
f)In summarischer Darstellung ist dieses Uebertragungsprincip vom Verfasser bereits angegeben und durch Anwendungen erliiutert worden (Festschrift der Universitait Greifswald, 1900; mit einem Zusatz abge- druckt im Jahresbericht der Deutschen Mathematiker-Vereinigung, Bd. 11, 1902, S. 340 u. ff.). Aehnliche Ge- danken, allerdings mit nicht ganz geniigender Ausarbeitung der Begriffe, hat gleichzeitig auch Herr Joh. Petersen entwickelt, dessen Arbeit (Kopenhagener Akademieber. 1900, S. 306 u. s. f.) Preunde der Nicht-Euklidischen Geometrie mit Interesse lesen werden. (Herr Petersen hat seitdem seinen Namen in Hjelmslev umgeandert.)
Weitere Anwendungen findet man in Schriften von J. Coolidge (The Dual Projective Geometry of Elliptic and Spherical Space, Diss. Bonn, 1904; Les Congruences isotropes, Ace. R. die Torino, 1903, 1905), sowie in einer Arbeit des Verfassers, Jahresber. d. D. M. V., Bd. 15, 1906, S. 476, u. f.
16
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

118 STUDY: Beitrage zur Nicht-Euklidischen Geomnetrie. I.
Verschieden ist dem entsprechend in beiden Fallen sowohl die Terminologie (z. B. Speer -Punktepaar) als auch der zugehorige Vorstellungsinhalt; und was im einen Falle anscelaulich und naheliegend ist, braucht es nicht ebenso auch inm ailderen zu sein. Das aber, kann man sagen, sind die Bedingungen, unter denen ein solches Uebertragungsprincip, deren man ja schon mehrere kennt, sich als wirklich fruchtbringend erweisen wird.
Uebrigens ist der bezeichnete Stoff ungemein umfangreich. Wir werden deshalb in dieser einleitenden Arbeit nur die grundlegenden Thatsachen vor- fiihren k6nnen, und auch diese - in der lauptsache - nur in der Beschriankung auf reelle Figuren. Sogenannte imaginare Figuren ziehen wir soweit in Betracht, als sie zurn besserea Verstandniss der reellen Geometrie dienen. Alle einzu- fiuhrenden Gr6ssen sind reell, wofern nicht ausdriucklich das Gegentheil bemerkt wird.
Die Geraden im dreidimensionalen elliptischen Raume bilden das gewohn- liche Pliicker'sche Liniencontinuum. Wir werden nun ineben dem Begriff der Geraden vorliiufig noch zwei andere Begriffe verwenden, die wir als Speer und Linienkreuz (oder, in anderem Zusammenhan g, Strahlenkreuz) bezeichnen. Das Linienkreuz ist die Zusaminenfassung einer Geraden mit ihrer absoluten Polare. Diese treten namlich haufig verbunden auf, und man braucht daher fur ihre Zusammenstellung ein besonderes Wort.* Der Name ist darin begrundet, dass die Figur, von irgend einem nicht zu ihr geh6rigen Punkte aus betrachtet, als Kreuz mit rechtem Winkel erscheint. ,,Speer" ist, wie gesagt, eine kiurzere Bezeichnung fuir ,,orientirte Gerade," oder Gerade ,,mit positiver Richtung", besser-da die Gerade geschlossen ist-Gerade mit positivem Uvrlaufssinn. Sind zwei Punkte x, y auf einer Geraden gegeben, und keniit man, wie wir annehmen wollen, den Cosinus ihrer Entfernung, so kann daraus deren Sinus durch Aus- ziehen einer Quadratwurzel, also zweiwerthig, bestimmt werden. Bei zwei Punkten auf einem Speer sind dagegen Cosinus und Sinus der Entfernung zugleich rational-bekannt. Die Mehrdeutigkeit der Entfernung ist, so weit sie das Vorzeichen des Sinus beeinflusst, aufgehoben.
Jede Gerade gehort also einem Linienkreuz an, und sie wird von zwei Speeren uiberdeckt. Jedes Linienkreuz enthilt zwei Gerade, die einander imn absoluten Polarsystem entsprechen, und es enthalt also vier Speere. Daher bilden die drei Figuren Speer, Gerade, Linienkreuz im Sinne des Analysis Situs
*) Es ist diese Figur das einfachste Raumelement einer besonderen Disciplin, der dual-projectiven Geometrie im elliptischen Raume. Vgl. die citirten Arbeiten von Coolidge und dem Verfasser.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begriffe Links und Rechts in der ellipti8schen Geometrie. 119
versohiedene Mannigfaltigkeiten. Nur in einer gewissen Umgebung eines bestiinmten Speeres kann man sie eindeutig auf einander beziehen. Wo immer
aber der ganze Rauim betrachtet wird, also bei allen algebraischen Problemen, da ist es unerlasslich, diese Figuren gehorig zu unterscheiden.
Die analytische Erkliirung der dreierlei Gebilde gestaltet sich am einfachsten, wenn man das absolute Polarsystem in der Form annimmt:
(Xy) = XOyO + XlYl + x2Y2 + X3Y3 = 0. (1)
Die gew6hnlichen durch die Gleichung
01 23 + X02 1 + 03 12 = ? (2)
verbundenen Liniencoordinaten Xi- =iyK- xya konnen dann durch andere Ver- halitnissgr6ssen X1 ... X6 vertreten werden, die wie folgt erkliirt sind:
2X1 = XO1 + X23, 2X2 = O1 - X23
2X3 = e02 + 31, 2X4 = 02 -31, (3)
2X5 = No3 + X121 2X6 =03 -121
so dass die Gleichung (2) die Form
X12 + X32 + 2__ = XI + X42 + XI (4) annimmt.
Als Coordinaten einer Geraden kionnen also sechs VerhdItnissgro-ssen X1 X: X5
X2: X4: X6 dienen, die durch die Gleichung (4) verbunden sind. Nun findet sich sogleich, dass der Uebergang von einer Geraden zu ihrer
absoluten Polare dadurch bewirkt wird, dass man entweder X2, X4, XB oder X,1 X3, X5 durch die entgegengesetzt-gleichen Gr6ssen ersetzt. Sind anderseits zweimal drei (reelle) Verhilitnissgr6ssen gl, 93, 5 und92 , 4 ) g, gegeben, so kann man imimer auf zwei wesentlich versohiedene Arten zugehorige Grossen
Xi Z- gC1 9 X3 =C X3 y X6 Z g 5
X2 _ 1x21 X4 z4 x 6 X=x%
derart finden, dass die Gleichung (4) besteht, und diese beiden durch Ausziehen
einer Quadratwurzel zu ermittelnden Systeme von sechs homogenen Grdssen stellen absolut-polare gerade Linien dar. Also ergiebt sich:
Als Coordinaten eines Linienkreuzes k'onnen zwei Systeme von je drei Ver-
haltnissgr6ssen 1 : 93 : 5 und 92 94 :
dienen.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

120 STUDY: Beitrage zur Nicht-Euklidischen Geometrie. 11.
Endlich behaupten wir, dass Coordinaten eines Speeres entstehen, wenn man aus den beiden unter eijander gleichen Ausdrilcken (4) die Quadratwurzel zieht und diese den Gr6ssen X als eine siebente Coordinate X0 = JX00 hinzufiigt:
Als Coorditnaten eines Speeres konnen sieben Verhaltnissgrossen dienen,
XO X: X3: X5: X2: X4: X6,
die durch die beiden Gleichlungen
Xo' _- Xy2 + X3 + X5 = X'2 + 2+ 6(5) verbunden sind.
Wo es sich, wie hier, um reelle Gr6ssen handelt,*) da ist das Verschwinden von X0 ausgeschlossen, und man kann daher, im reellen Gebiete, unbeselladet der Vollstiandigkeit der analytischen Darstellung, XO = 1 setzen, und als Coordinaten
eines Speeres sechs nicht-homogene Grossen benutzen, die durch die beiden Gleichungen
X2+X2+X2=1, X2+X2+X2=1 (6) 1 +3 + 5- 2 +4 6 6 verbunden sind.
In der That ergiebt sich das Gesagte sogleich, wenn man - unter Annahme des Kriimmungsrnaasses Eins fiur die elliptische Maassbestimmung-Sinus und Cosinus der Entfernung zweier Punkte x, y analytisch ausdrtickt.
Man hat zunachst, wie bekannt,
cos( y)= (xy) (7) V(xx)AV (yy)' 7
und folglich, wenn x und y versehieden sind, und X oder X die dann bestimmte Verbindungslinie beider Punkte bezeichnet,
(oo X Y=V - x$ y.i
Die Grosse sin (x, y) enthalt also gegeniiber cos (x, y) keine neue Irrationalitiat, und tg (x, y) ist von solchen iuberhaupt frei.
Natulrlich ist es nicht nothwendig, den letzten Satz gerade so zu fassen, wie wir es gethan haben. Die Gr6ssen No,, Xi,, z. B., die durch die Gleichungen (2) und
Xoo ?o1 + X3 +I 3+ 23+31 + ?2 (9)
*)Im complexen Gebiete wird man umgekehrt die Coordinaten zur Definition der erweiterten Begriffe
Gerade, Linienkreuz, Speer, benutzen. Diese complexen Figuren haben dann aber nicht mehr einen so einfachen
Zusammenhang wie die ebenso benannten reellen, auch sind noch ganz anders geartete Coordinaten in
Betracht zu ziehen. Wir kommen hierauf spiter noch zuriick.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begriffe Links und1 Rechts in der elliptischen Geom etrie. 121
verbunden sind, leisten Dasselbe. Von zwei Speeren, deren Coordinatern entgegen- gesetzte Verhaltnisse X0 :Xi oder Xoo : Xe, liefern, werden wir sagen, jeder sei die Umkehrung des anderen.
Dieser Umkehrungsprocess ist mit allen Bewegungen im elliptischen Raume vertauschbar, selbst aber ist er keine Bewegung: durch ihn wird die Gruppe der Bewegungen, mit dem Speer als Raumelement, zu einer sogenannten gemischten Gruppe erweitert.*)
Unsere Formeln ergeben nun ohne Weiteres die folgenden Satze: Das Continuum aller reellen Speere im elliptischen (oder spharischen) Raume
lasst sich, i~berall eindeutig und stetig, abbilden auf das Continuum aller reellen Paare von Punkten, die man zwei Kugeln (des reellen Euklidischen Raumes) vom Radius Eins entnehmen kann.)t
Bei sachgemasser Wahl dieeser Abbildung gehoren je zwei Punktepaare, die auf beiden Kugeln einander diametral gegenifberliegen, zar selben GERADEN; und je vier Punktepaare, die atuf denselben beiden Durchmesgern der Bildkugeln liegen, zum selben LINIENKREUZ.
Mit anderen Worten: Das Continuum der Linienkreuze ist abgebildet auf das Conitinuum der Geradenpaare aus zwei Biindeln, oder der Punktepaare aus zwei ebenen projectiven Punktcontinuis. Durch passend gewvahlte vierfache Ueberdeckung dieses Continuums entsteht ein weiteres Continuum, auf das das Speercontinuum abgebildet werden kann. Die Panktepaare aus dem zweiten Continuum sind durch den Umstand, dass dieses das erste iiberlagert, zu Paaren angeordnet; und wenn man je zwei solche auf beide Kugeln vertheilte Paare nicht unterscheidet, so entsteht ein drittes Continuum voni Zusammenhang des Pliicker'schen Liniencontinuums. Alle drei Continua sind abgeschlossen.
Natuirlich liegt die Bedeutung des abgeleiteten Satzes nur zum kleinsten Theile im Gebiete der Analysis situs. Es kommt vielmehr vor Allem darauf an, dass der vorgefUhrten besonderen Form der Abbildung der Charakter der Invarianz gegenilber Beweguringen des elliptischen Raumes sowohl wie Beweg- ungen der beiden Kugeln innewohnt. Dies wollen wir nunmehr darlegen. Wir
*) Der Speer verhilt sich zur Geraden etwa so wie in der zweidimensionalen sphlrischen Geometrie der Punkt
der Kugel zu deren Durchmesser, oder zum Punkte der elliptischen Ebene. Bewegungen entsprechen in dieser
Analogie Bewegungen, der Umkehrung aber entspricht die Diametralspiegelung. Der erweiterten Bewegungs-
gruppe ist analog die Gruppe der Bewegungen und Umlegungen.
f) Aus dem Folgenden ergiebt sich, dass man statt dieser Kugeln auch Kugeln oder besser noch doppelt iiberdeckte Ebenen des elliptischen Raumes selbst benutzen kann.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

122 STUDY: Beitrage zur Nicht-Eaklidischen Geometrie. II.
b3zeichnen zu diesern Zwecke die beiden Kugeln, deren reelle Punkte die homno- genen rechtwinkligen Coordinaten Xo: X1: A3: XC5 und X0: X2: X4: XC8 haben, als linke und rechte Bildkugel. Wir brauchen ferner die Bezeichnungen und Rechnungsregeln der Quaternionentheorie. Wir verstehen zum Beispiel unter x ?1, Xr, A = a, B =b die Quaternionen
x = xOeO + Xle1 + X2e2 + X3e3,
AC1 = Xoeo + Xle1 + X3e2 + X5e3,
X, = Xoeo + X2e2 + X4e2 + Xe.,
A = aoeo + a,el + a2e2 + a3e3 = a,
B = boeo + b1el + b2e2 + be3_ =
u. Ss.w., wahrend x, XI, Xr selbst die den drei ersten zugeordneten Punkte des elliptischen Raumes und der beiden Bildkugeln bezeichnen. Die Conjugirte
ao eo - a1 el - a2 e2-a3 e3 der Quaternion A bezeichnen wir mit A. Jede Beweg- ung im elliptischen Raume kann dann bekanntlich auf eine einzige Weise in eine linkseitige Schiebung
XI = xl. N(a) = a.a, + 0 (10,)1 und eine rechtseitige Schiebung
X'$X.b {N(b)=b.b,* O (1O,r)
zerlegt, und folglich in der Form
x' =a..b {N(a), N(b)*O} (11)
dargestellt werden. Die Zusammensetzung der Parameter mehrerer hintter einander auszufiihrender Schiebungen und iuberhaupt mehrerer Bewegungen erfolgt nach der Multiplicationsregel der Quaternionen
a.a - a'1 b = a ,', (12)
Das heisst, fiihrt man z. B. nach der Schiebung mit den Parametern ai die
*) Die obigen Formeln unterscheiden sich von den bekannten Cayley's (Crelle's Journal, Bd. 50, oder Werke Bd. II, S. 214) nur ganz nebensiehlich in der Bezeichnung. Die geringe Abweichung, die wir angebracht haben, indem wir in (11) links nicht die Quaternion d, sondern deren Conjugirte setzen, bewirkt aber eine nicht unbe- deutende Vereinfachung, wo es sich darum handelt, Folgerungen aus diesen Formeln durch Worte wiederzu- geben; sonst miusste schon der Inhalt der Gleichungen (12) auf eine etwas umstaindlichere Weise beschrieben werden. Es ist iuberhaupt zu beachten, dass und wie die genaue Form der spiter abzuleitenden Siitze von der Auswahl abhangt, die an mehreren Stellen willkiirlich, aber mit nothwendiger Willkiir, unter logisch-gleich- werthigen Bestimmungen getroffen wird.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begriffe Links und Rechts in der elliptischen Geometrie. 123
Schiebung mit den Parametern a'i aus, so ergiebt sich die Schiebung mit den Parametern a11i.
Ferner ist evident die Folgerung: Die linkseitigen und rechtseitigen Schieb- ungen, und damit weiterhin alle durch die Bezeichnungen links und rechts zu unter- scheidendRen Begriffe werden durch die Umlegun gen mit einander vertauscht. (Unter einer Umlegung verstehen wir hier wie sonst eine Transformation mit spiegel- bildlicher Gleichheit entsprechender Figuren).
Nimmnt man nun an, dass N(a) = N(b) - was unbeschadet der Allgemein- heit auf zwei Arten bewirkt werden kann - und unterwirft man dann den Speer X der Bewegung (11), so erhbilt man die einfachen Formeln
--A.XIA, XI=B. Xr. B (13)
die folgenden Satz enthalten: Den linkseitigen und rechtseitigen Schieblnngen im elliptischen Raume ent-
sprechen eindeutig-umkehrbar die Drehlungen der linken und rechten Bildkugel. Die (Cayley'schen) Parameter der Schiebungen sind identisch mit den
(Euler'schen) Parametern der beiden orthogonalen Substitutionen, die die zugeh6rigen Drehungen der Bildkugeln bewirken.
Hiernach sind also die in Betracht komrnenden Gruppen - die Gruppe der Bewegungen im elliptischen Rauime, und die Gruppe der simultan auszu- fiuhrenden Drehungen beider Kugeln, (holoedrisch-)isomorph auf einander bezogen.
Jeder Punkt im elliptischen Raume, und ebenso jede Ebene, ist nun Ort von oo 2 Speeren. Die niachste Frage, die sich darbietet, wird also diese sein: Welches sind die sphiirischen Bilder der o3 Punkte und der o I Ebenen? Die Antwort hierauf muss abhiangen von der Orientirung der beiden Cartesischen Coordinatensysteme X0: X1: X3: A5 und X0 AC2: X4 :X6. Wir nehmen an, dass diese gleic,hartig orientiert (congruent, z. B. identisch) sind. Dann gilt der Satz:
Den 0 I Speeren eines Bi,ndels ent- sprechlen solche so 2Punktepaare beider IKugeln, deren einzelne Punkte durch eine Bewegung einander zugeordnet s8ild.
Der Scheitel des Biindels hat zu homogenen Coordinaten die Euler'schen Parameter dieser Bewegung.
Den 0 2 Speeren eines Feldes ent- sprechen solche o0 2 Punktepaare beider Kugeln, deren einzelne Punkte duirch eine Um legung einander zigeordnet sind.
Die Ebene de8 Feldes hat zu homo- genert Coordinaten die Euler'schen Parameter dieser Urn legung.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

124 STUDY: Beitrdge zur Nicht-Eukdidischen Geometrie. II.
Zunaichst erkennt man naimlich ohne Weiteres, dass der folgende speciellere Satz gilt:
Damit zwei Speere X, Yeinander schneiden, ist nothwendig und h/dnreichlend, dass i/re spharisclhen Bilder X:, Y1 und Xr, Yr auf beiden Kugeln zu einander congruent oder, was dasselbe ist, symmetrisch (symmetrisch-gleich) sind.
Es niissen also, wenn man die linke Kugel z. B. congruent durch eine Bewegung - auf die rechte abbildet, dadurch aus den 0 I Speeren solche o herausgehoben werden, die einander paarweise schneiden. Man braucht daher nur noch festzustellen, ob diese, oder vielmehr ihre geradlinigeni Triager, ein Biundel (x) oder ein Feld (u) erfiillen.
Dass nun ein Punkt x und eine Gerade oder ein Speer X vereinigt liegen, wird ausgedrtuckt durch ein ohne weiteres aufzustellendes System von vier linearen Gleichungen (deren zwei von einander unabhbingig sind). Diese Gleich- ungen lassen sich mit Hillfe der Quaternionen der Formn nach in eine einzige zusammenziehen:
Der Punkt x und die Gerade oder der Speer X liegen vereinigt, wenn die
entsprechenden Quaternionen x und X in der Beziehung stehen:
X .X= X r; (14a)
ebenso findet die vereinigte Lage einer Ebene u und eines Speeres oder einer Geraden X ihren Ausdruck in der Quaternionengleichung:
X =.u- . Xr (14b)
Ldst man aber diese Gleichungen nach der Quaternion Xr auf, so ergiebt sich
N(X).?r-x.X,.x) ~~~~(I1ta) N(u).X X = a.Xu * u (15b)
Nun bedeuten die Gleichungen (1 5a) eine eigentliche, die Gleichungen (1 5b) eine uneigentliche orthogonale Substitution. Die Punkte XI, d. h. X0: X1: X3:
der linken Bildkugel werden also den Punkten Xr, d. h. X,: X2: 4: X der rechten Bildkugel im Falle (a) durch eine Bewegung, im Falle (b) durch eine
Umnlegung zugeordnet. Anders ausgedriuckt, im Falle (a) sind entsprechende Figuren auf beiden Kugelin zu einander congruent, im Falle (b) symmetrisch- gleich.
Die abgeleiteten Satze sind von Bedeutung fur die algebraische und Differ-
entialgeometrie im elliptischen Raume, namentlich aber enthalten sie in nuce
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begriffe Links und Rechts in der elliptischen Geometrie. 125
dessen ganze Kinematik, deren siammtliche grundlegende Thatsachen daraus
theils ohne Weiteres abgelesen, theils mit geringer Muihe entwickelt werden
konnen. Wir werden hier aber in der Hauptsache nur solche Erliauterungen hinzufiugen, die wir demniachst zu verwenden gedenken.
Zuniachst bemerken wir, dass es in der (nicht erweiterten) Gruppe der
Bewegungen im elliptischen Raume*) dreierlei involutorische Transformationen giebt: Je 0 2 linkseitige und rechtseitige involutorische Schiebungen, entsprechend den involutorischen Bewegungen (Umweuidungen) der linken und rechten Bild-
kugel, sodann oo I Umwendunygen, projective Spiegelungen an Linienkreuzen, die durch Zusammeiisetzung von je zwei verschiedenartigen involutorischen Schiebungen entstehen. Leicht utbersieht man, wie sich aus diesen Transfor-
mationen, oder, weiin man noch weiter gehen will, auch aus Spiegelungen an
polar zugeordneten Punkten und Ebenen alle m6glichen Bewegungen zusam-
mensetzen lassen. Ferner heben wir hervor: Wenn eine Gerade durch den Orientirungsprocess in einen Speer verwandelt
ist, so erfordert die Orientirung ihrer absoluten Polare eine neue Irrationalitat nicht mehr.
Es ist das eine gewiss sehr selbstverstiindliche, gleichwohl aber wichtige
Bemerkung. Denn hierauf beruht es, dass man im elliptischen Raume unserer bis jetzt nur formalen Unterscheidung von links und rechts eine iihnliche
Bedeutung beilegen kailn, wie der utblichen Unterscheidung von links und rechts im Euklidischen Raume (wo es nur eine Art von Schiebungen giebt). Fiihrt
man niamlich auf den Speer
KO: l: 3 X T5 X TX2: X4: 6
irgend eine der oo ' involutorischen linkseitigen Schiebungen aus, die die Gerade des Speeres in deren absolute Polare iubergehen lasseli, so erhalt man immier denselben Speer
X0:-X1: -X3: -X5: X2: X4:6 ()
wahrend bei entsprechender Verwendung rechtseitiger Schiebungeii stets der umgekehrte Speer
XO :A X3: X6 - X2:- X4: (- )
entsteht. Wir ko'nnen aus diesem Grunde sagen: Nach Einfifhrung des Speeres als Raumelement hat man, statt einer ,,absoluten
*) Ganz abweichend verhalt sich in dieser Hinsicht der spharische Raum.
17
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

126 STUDY: Beitrage zur Nicht-Euklidischen Geometrie. I.
Correlation," in der Speermannigfaltigkeit deren zwei vor sich, und diese konnen als ,,linkseitige" und ,,rechtseitige" absolute Correlation unzweideutig unterschieden
werden. Das sphlrische Buld z. B. der rechttseitigen absoluten Correlation ist die identische Transformation auf der linken Bildkugel verbunden mit der Diametral-
spiegelung auf der rechten Bildkugel.
Natiurlich iubertriagt sich diese Unterscheidung auf alle Correlationen, die durch Zusammensetzung einer Bewegung mit der einen oder anderen absoluten Correlation entstehen. Man erhialt zuniachst eine vier Schaaren von Transfor- mationen umfassende Gruppe, bestehend aus den Bewegungen, den Bewegungen verbunden mit der Umkehrung, und den zwei Schaaren von Correlationen.*) Invariant enthalten sind darin nicht nur die Beweoungen, sondern natuirlich auch deren Zusammnenfassung mit irgend einer der drei anderen Schaaren.
Die Umkehrung und die beiden absoluten Correlationen sind mit einander vertauschbar.t) Je zwei von diesen Transformationen der Speere ergeben zusammen- gesetzt die dritte.
Nunmehr ist es mdglich, unter den beiden Orientirungen der Geraden, die zur Geraden eines Speeres X absolut-polar ist, ein-fuir-allemal eine Auswahl zu treffen. Wir entscheiden uns dafur, dass absolute Polare des Speeres X schlechthin der Speer heissen soll, der aus X durch die rechtseitige absolute Correlation hervor- geht, dessen Coordinaten also durch obige Formel (r) -nicht (1) - gegeben sind. Damit ist dann zugleich festgesetzt, dass nicht nur der Punktreihe auf dem Speer ein bestimmter Umlaufssinn zukommt, sondern auch dem Ebenenbilschel durch den Speer; n'a'mlich der Umlaufssinn der Pole oder auch der Spuren dieser Ebenen auf dem absolut-polaren Speer.
Wird eine Gerade orientirt, in einen Speer verwandelt, so erhalt niclht nur die goniometrische Tangente der Entfernung je zweier Punkte auf ihr einen eindeutig bestimmten Werth, sondern auch die goniometrischle iangente des Winkels je zweier Ebenen, die diese Gerade enthalten.
(Sofern namlich, wie sich von selbst versteht, diese Punkte oder Ebenen in
*) Natuirlich wird auch die Schaar der Umlegungen erweitert, so dass im Ganzen acht Schaaren von Speerr
transformationen zu betrachten sind. Wir kbnnen aber nicht auf alle Einzelheiten eingehen, die ja der Lese-
sich sehr leicht selbst wird deutlich machen konnen. Man lege sich z. B. die Fragen vor, wie die Umlegungen
mit Hilfe der Quaternionen dargestellt und mit den Bewegungen und iinter einander zusammengesetzt werden
k6nnen, welches ihre spharischen Bilder sind, wie alle involutorischen Umlegungen sammt deren spharischen
Bildern gefunden werden, u. s. w.
f) Sie sind natuirlich auch mit allen Bewegungen vertauschbar. Mit den Umlegungen dagegen ist nur die
Umkehrung vertauschbar.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begriffe Link89 und Rechts in der elliptischen Geometrie. 127
eine bestimmte Reihenfolge gesetzt sind). Ein entsprechender Satz gilt natiurlich futr Speere, die den vorgelegten Speer im selben Punkte senkrecht schneiden. Treffen solche Speere Y, Z die absolute Polare des Speeres X oder X in den Punkten n, ', so ist die goniometrische Tangente des Winkels zwischen Y, Z, d. h. des Abstandes (n, #) nach Nr. (7, 8) gegeben durch die Formeln*)
tg ( Y ) = (04, n4i - 14 =*=* (X ).43x
- ) 3*=*
2Xo _ _ r, 0o1- 72 t3f22 _ *
(n Xl 1 X2 I
( ) X + 2
Von unseren beiden Bildkugeln hatten wir bisher nur angenommen, dass die zugehorigen Cartesischen Coordinatensysteme gleich-orientirt seien. Darin liegt, dass eine sogenannte Orientirung der einen Kugel, d. h. die Festsetzung eines positiven Umlaufssinnes um dereni Punkte herum, eine entsprechende Orientirung der anderen Kugel nach sich zieht. Danach haben wir noch zwei Moglichkeiten vor uns, und unter diesen miussen wir wiederum eine Auswahl treffen.
Es m6gen die Punkte Y,, Z, und Yr, Zr von den Punkten X,, Xr den sphairischen Abstand = i mod. n haben. Dann kann man offenbar die Gr6ssen tg (Yr, Z,) und tg (Y,, Z,) eindeutig erkliren durch die Formeln
tg YI ZI =~-XO (y3Z5 - Y5Z)-=et. (Y1Z1 + Y3Z3 + YGZG)X7 etc.,
t.q(Yr Zr = XO (Y4 Z6- Y6 Z4) - etc. ,
tg( Yr Zr)= ( y2 + YJZ + Y6Z6) X2
aber ebensowohl auch durch die entgegengesetzt-gleichen Ausdriucke; und es ist deutlich, dass die Entscheidung fiir die angescbriebenen Forrneln eben darauf hinauslauft, um alle Punkte beider Kugeln herum einen positiven Drehungssinn festzusetzen. Urn eine bestimmte Vorstellung zu erhalten, wollen wir annehmen, dass z. B. die linke Bildkugel die Erdkugel sei, und dass der Punkt (1, 1, O, 0) deren Nordpol vorstelle. Lassen wir dann den Punkt (1, 0, 1, 0) in den Plunkt (1, 0, 0, 1) verm6oe einer Drehung durch 450 von Westen nach Osten iubergehen, so ist damit der Aequator orientirt, und mit ihm die ganze Kugel. Irgend ein Punkt X1 liegt zu dem entsprechetiden orientirten Hauptkreis so, wie der Nord- pol zu dem von Westen nach Osten umlaufenen Aequator, also links von der
*) Wir benutzen das Zeichen (Y, Z) fur diesen Winkel nur vorlaufig. Spater werden wir ein anderes Zeichen einf ihren.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

128 STUDY: Beitrage zur Nicht-Euklidischen Geometrze. II.
positiven Richtung des Hauptkreises. Sind Y, und Y, + d Y, consecutieve Punkte auf dem Hauptkreis, so folgen diese im positiven Sinne auf einander, wenn
( YI, Y, + d YI) > O ist. Nun ist leicht zu sehen, dass zwischen den dreierlei Gr6ssen, deren Aus-
driucke wir soeben gebildet haben, eine einfache Beziehung immer dann besteht wenn die Punkte XI, Xr sowie Yt, Yr und Za, Zr die Bilder der Speere X und Y, Z sind. Die drei Ausdriicke muissen einander gleich sein, hochstens abge- sehen von ihren Vorzeichen. Wir behaupten, dass ihre Gleichheit sich auch auf die Vorzeichen erstreckt, tg (IY, Z) = tg (Y1, Z1) = tg (Zr J[T).
Um dies einzusehlen, braucht man nur zu zeigen, dass die vollkommene Gleichheit der drei Ausdriucke bei irgend einer durch Bewegungen zu erreichenden speciellen Lage der Speere X, Y, Z vorhanden ist: Dann muss sie offenbar immer stattfinden. Wir wollen etwa annehmen, dass der Punkt in dem der Speer X von den beiden Speeren Y, Z senkrecht getroffen wird, der Punkt (1: 0: 0: 0) sei. Dann wird
XI = X?, = - -,2= 24 .XX2 X5 - X6 = X03,
und X23-=31 = 12 U.S. W., ferner o = o= 0, und z. B.
YI=Y2 =p71, Y3=Y4=pri2, Y5 =Y =p7;
alle drei Ausdriicke re-luciren sich jetzt auf denselben Werth, niamlich
X0 (n743 - 7342) - etc (nlXl + 7242 + 343) 01
Der hiermit bewiesene Satz lIasst sich am bequemsten in kinematischer Form ausdriUCken:
La"st man urm einen Speer X einen zweiten Y, der den ersten senkrecht trijft, im positiven Sinne sich mit constanter Winkelgeschwindigkeit drehen, so drehen sich beide spharischen Bilder von Y urm die sphacrischen Bilder von X ebenfalls im positiven Sinne, und zwar mit eben derselben Winkelgeschwindigkeit.
Die abgeleiteteni Formeln aber lassen sich offenbar zweckmiassiger schreiben. Wir setzen zur Abkturzung
(XYZ) = I X1i Z I (XYZ)r | X2 Y4Z6j I,
(YZ)1= Y1Zl+ Y3Z3+ Y5Z5,
( YZ)r = Y2Z2 + Y4Z4 + Y6Z6
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begriffe Links und Rechts in der elliptischen Geometrie. 129
Dann ergeben sich einfache auch in der aiusseren Form invariante Ausdriucke fur tg (Y, Z), aber - nach leichter Erweiterung der aufgestellten Formeln- auch noch fur cos (Y, Z) und sin (Y, Z):
CO S ) = (YZ)1 _ (YZ)r os(YZ) yoz - 16
?O ZO ? (16)
sin (Y, ) = (XYZ)- (XYZ)r
Diese Gleichungen gelten also fnr je drei Speere X, Y, Z, von denen der erste die beiden letzten senkrecht im selben Punkete schneidet. Sie bestimmen bis auf Vielfache von 27t genau den Winkel, durch. den man den Speer Y im positiven Sinne um den Speer X drehen mus.s, um ilhn mit dem Speere Z zur Deckung zu bringen.
Man beachte, dass bei einer Drehung durch den Winkel 7n der Speer Ynoch nicht wieder seine frilhere Lage einnimmt, sondern umgekehrt wird.
Wir haben niun fast alle Vorbereitungen getroffen, die zu einer sorgfiiltigen Formulirung des grundlegenden Satzes nothig sind, dessen Darlegung das Hauptziel unserer Untersuchung bildet.
Es seien zwei im Uebrigen ganz beliebige Speere zuniachst so gegeben, dass die zugehlrigen Durcbmesser beider Bildkugeln von einander verschieden sind, und also zwei Hauptkreise (grosste Kreise) auf diesen Kugeln vollig bestimmen. Unter den zweimal zwei Polen dieser Hauptkreise wahlen wir irgend eines der vier moglichen Paare X,, Xr nach Belieben aus, und erhalten so einen Speer X, der Y und Z senkrecht schneidet. Die Schnittpunkte von Y und Z mit X m6gen
z und die Schnittpunkte von Y und Z mit der Polare voIn X mrgen n, heissen. Wir konnen danin etwa y mit ' durch eine Gerade verbinden, und dieser eine beliebige Orientirung beilegen, wodurch ein Speer S entsteht, der ebenfalls X und die Polare von X senkrecht trifft.
Wir nennen nun ,, Winkel der Speere Y, Z "-in Zeichen ang (Y, Z)-den (natfirlich nicht v5llig bestimmten) Winkel, dur-ch den man Y um X drehen muss, urm den Speer S zu erreichen. Wir nennen ferner ,, Abstand der Speere " Y, Z- in Zeichen dist (Y, Z)-den Winkel, durch den man S urm die Polare von X drehen muss, urm den S'peer Z zu erreichen.
Zur richtigen Auffassung dieser Definitionen ist Mehreres wohl zu beachten. Erstens, dass die Unterscheidung der Begriffe Winkel und Abstand erst dadurch erm5gliccht wird, dass man unter den gemeinsamen Normalen der Speere Y, Z eine einzelne (X) willkilrlich ausgewahlt hat.*)
*)In diesem Punkte unterscheidet sich die elliptische Geometrie wesentlich von der Euklidischen und der (reellen) hyperbolischen Geometrie.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

130 STUDY: Beitrdge zur Nicht-Euklidisclen Geometrie. I.
Zweitens, dass nach Auswahl dieser Normale noch eine doppelte (nicht vier- fache) Willkiir vorliegt. Durch die Orientirung der gewiihlten Normale niamlich wird auf Grund unserer Definition (S. 126) die absolute Polare von X ebenfalls orientirt, und darnit wird die Unbestirantheit des Vorzeichens beseitigt, die sonst den Winkel und Abstand genannten Grossen anhaften wiurde. Sodann aber untersteht noch die Orientirung des Speeres S dem Belieben. Eine Aenderung hierin hat otfenbar die Wirkung, dass Abstand und Winkel um je eimi ungerades Vielfaches von -n geiindert werden. Nach Auswahl und Orienttirung einer gemeinsamen Normale der Speere Y und Z sind al8o Winkel und Abstand einzeln bis auf Vielfache von 7 bestimmt, beide Grossen zusammen aber so, dcass un- gerade Vielfache von n zu beiden nur g I e ic h z e it i g hinzugefilgt werden kbnnen.
Der spharische Abstand der linken sphdrischen Bilder der Speere Y, Z ist gleich der Summe, und der spharische Abstand der rechten sphdrischen Bilder gleich der Differenz von Wink el und Abs8tand der Speere Y, Z.
In Zeichen: (YI, Z1) = ang (Y, Z) + dist (Y, Z), (17)
( Yr, Zr)=ang ( Y, Z) -dist ( Y, Z) .
Zum Beweise drehe man Y um X, bis S erreicht wird. Dann drehen sich
Y[L und Yr um XI und Xr bis in die Lagen S, und 5,; und zwar wird, wenn der Speer Y, bevor er zur Ruhe kommt, den Speer S irgend eine Anzahl von Malen im positiven oder negativen Sinne iiberschreitet, genau dasselbe von den sphairi- schen Bildern gelten: Man hat, bei entsprechenden continuirlichen Lagen4nder- ungen nicht nur Congruenzen mod. 27, sondern auch die entsprechenden Gleichungen:
(Y} S)-(Y1, Sj) (Yr, Sr) Dreht man dann S weiter, nunmehr aber um die absolute Polare des Speeres X, so ergeben sich analoge Gleichungen:
(S) Z) - (81) Zl) (Sr) Zr).
Andererseits ist natiirlich ( YI, S,) + A)l Zi) = ( YI2),
(Yr, Sr) + (Sr, Zr) = (Yr Zr))
Hieraus folgen unmittelbar die Gleichungen (17), an deren Stelle iubrigens meistens Congruenzen nach dem Model 27t zu benutzen geniigen wird.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begriffe Links und Rechts in der elliptischen Geometrie. 131
Handelt es sich darum, bei gegebenen Speeren Y, Z die Ausdriicke der goniometrischen Functionen von ang (Y, Z) und dist (Y, Z) zu berechnen, so hat man zuachst den Speer X dadurch genau Zll bestimmen, dass man in den Gleichungen
Xo = V Yo'Zo -( YZ) I . V/ Yo'ZO _ ( YZ)'r
Xl = / Y'OZ -( YZ)Hr * Y3 Z - Z3 Y, X3=VA YOZO (YZ)2. Y5 -Z5 Y1 ' X5= YZ-( YZ)Hr Y1Z-Z1Y3, (18) X2 = Y2Z - (YZ)2H Y4 Z Z4Y6, X4 = YOZ20-(YZ) Y6 Z2-Z6 Y2 X6= Y ZO -(YZ) Y2 Z4-Z2 Y
jeder der beiden Wurzelgr6ssen einen bestimmten Werth beilegt. Nachdemn dies geschehen ist, gelten die Formeln
X2 = X2 + +X - + +2 und
Cos (Y, Z), = (YZ)t sin (Y, Z) (ylz0'
(y0z0' i(Y ).(XYZ)r (19)
Cos (Y;Z)r (YZ)Y.__ C09~ ~~Y ( X r=yZO in ( Y, )r ,ro YO ZO (t9
Tritt einer der ausgeschlossenen Grenzfiille ein, so werden die Formeln (18) illusorisch; man uibersieht jedoch sofort, welche Gleichungen dann an ihre Stelle zu setzen sind. Die Gleichungen (17) und (19) bleiben in Geltung. Die ge- nannten Fiille aber haben ein besonderes Interesse; sie verdienen eine besondere Beriicksichtigung namentlich in terminologischer Hinsicht.
Wir sagen, zwei Speere oder Gerade oder Linienkreuze, deren linke (rechte) sphiirische Bilder demselben Durchmesser der entsprechenden Bildkugel ange- h6ren, seien linkseitig (rechtseitig), kiurzer links-(rechts-) parataktisch.*) Dann gilt der Satz:
Zwei Gerade, die nicht parataktisch sind, haben zwei .und nur zwei gemeinsame Normalen, deren jede die absolute Polare der anderen ist.
Zwei links- (recihts-) parataktische aber weder identiscihe noch absolut-polare Gerade haben xo1 gemeinsame Normalen, von denen je zwei rechts- (links-) pa rataktisch sind.
*) Parataktische gerade Linien heissen - auf Grund einer abweichenden Definition - nach anderen Autoren
,,Clifford'sche Parallele."
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

132 STUDY: Beitrage zur Nicht-Euklidischen Geometrie. IL
Ausserdem geholren diese Norrmalen natiurlich zu zweien als absolute Polaren zusammen.
Wir sagen sodann, zwei Speere, deren linke (rechte) sphiirische Bilder identisch sind, seien links- (rechts-) syntaktisch; wenn aber die Bilder einander diametral gegeniuber liegen, so sagen wir, sie seien links- (rechts-) antitaktisch. Hiernach ist jeder Speer zum umgekehrten Speer, und nur zu diesem, sowohl links- als rechts-antitaktisch. Die Definition der absolut-polaren Speere kani jetzt so gefasst werden: Jeder Speer ist zu seiner absoluten Polare linlks-syntaktisch und rechts-antitaktisch. Es giebt einen einzigen Speer, der zu einem vorgelegtei Speer links-syntaktisch und zu einem zweiten rechts-syntaktisch ist, u. s. f. Man erkennt ferner ohne Weiteres:
Bei links-syntaktischen Speeren Y, Z ist
ang (Y, Z) + dist (Y, Z) -O mod. 27z, bei links-antitaktischen Speeren
ang (Y, Z) + dist (Y, Z) -=nmod. 27,
bei rechts-8yntakti.schen Speeren
ang(Y, Z)-dist (Y, Z)-O mod. 2n,
bei rechts-antitaktischen Speeren
ang ( Y, Z)-dist (IY, Z)=7z mod. 27z.
Umgekehrt kennzeichnet jede dieser Beziehungen die entsprechende Lage der beiden Speere vollstandig.
Die Gesammtheit aller Speere, die dasselbe linke (rechte) sph'arische Bild haben, bildet eine bernerkenswerthe zweidimensionale Mannigfaltigkeit oder Congruenz, wie wir kurz sagen k6unen, eine links- (rechts-) syntaktische Con- gruenz. Die Geraden, auf denen diese Speere liegen, bilden entsprechend eine links- (rechts-) parataktische Congruenz. Offenbar gehoren zu jeder parataktischen Liniencongruenz zwei wohl zu unterscheidende syntaktische Speercongruenzen, und alle drei Congruenzen sind vollkommen eindeutig auf einander abgebildet, und haben den Zusammenhang einer reellen KugelfliYche. Die parataktische Congruenz besteht, wie bekannt und auch niit Hiilfe unserer Bildkugeln unmit- telbar zu zeigen, aus allen reellen Geraden einer Congruenz erster Ordnung erster Classe. Ins complexe Gebiet erweitert, enthillt sie ganz die eine Schaar von Erzeugenden der absolaten Fliache; diese Erzeugenden konnen demnach eben- falls durch die Epitheta links und rechts unterschieden werden. Das Folgende
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begriffe Links und Rechts in der elliptischen Geometrie. 133
zeigt, dass es zweckmtanssig ist, , link.seitig " die Erzeugenden zu nennen, die von den linkseitigen Schiebungen unter einander vertauscht werden und bei den rechtseitigen Schiebungen einzeln in Reihe bleiben. Dann gilt offenbar der Satz:
Eine LINKs-parataktische Congruenz enthalt all RECHTseitigen Erzeugenden der absoluten Flache.
Diese werden dargestellt durch die Gleichungen
X1 = X3.= X5 =O, X2 + X4 + X2 = 0. (20, r)
Ebenso enthalt eine rechts-parataktische Congruenz alle linkseitigen Er- zeugenden
XI2 + X32 + XIr = 0-, S4 26=?*(2,1 X~+X~+X~=o X2=X4=XC6=o. (20, 1)
Die imaginaren Leitlinien einer linkseitigen (rechtseitigen) parataktischen Con- gruenz sind also linkseitige (rechtseitige) Erzeugende der absoluten Flc6che. Ihre Coordinaten lassen sich ebenfalls ohne Weiteres bestimmen, sollen uns aber hier nicht besehaftigen.
Schliesslich wird der Vollstiandigkeit halber noch zu bemerken sein: Zwei Speere (oder die entsprechenden Geraden) schneiden einander, wenn ent-
weder ang (Y, Z) oder dist (Y, Z)- 0 mod. 7Z ist. Sie sind zu einander orthogonal, das heisst, jeder schneidet die absolute Polare des
anderen, wenn entweder ang (Y, Z) oder dist (Y, Z) mod. n ist.
In beiden Fiillen schneiden sich zu zweien die Geraden der zugehorigen Linienkreuze.
Auf den letzten Entwickelungen beruhen die Begriffe, die man, wie bemerkt, zwar nicht genuigend erkliirt, aber durch die Worte ,,linksgewunden" und ,,rechtsgewunden" wenigstens angedeutet hat. Denken wir uns zunachst einen Speer X und eine Gerade Y, die weder den Speer X selbst noch auch dessen absolute Polare treffen soll. Dann geht durch jeden Punkt y von Y eine Secante an x und an die absolute Polare von X. Bewegt sich y auf Y, so werden sich die Spuren dieser Secante in irgend einem Sinne auf X und auf der Polare von X bewegen. Erfolgen beide Bewegungen in gleichem, z. B. in positivem Sinne, so werden wir sagen, Y sei in Bezug auf X rechtsgewunden, andernfalls linksgewunden. Aber diese Eigenschaften iindern sich nicht, wenn man den Speer X und folglich auch seine Polare umkehrt. Daher handelt es sich um eine Lagenbeziehung zwischen den beiden Geraden X, Y. Stellt man das zugehlrige analytische Kriterium auf, so sieht man, dass iiberdies auch
18
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

134 STUDY: Beitr'age zur Nicht-Euklidischen Geometrie. II.
diese beiden Geraden ihre Rolle wechseln k6nnen, ohne dass die Eigenschaft, links- oder rechts-gewunden zu sein, verloren ginge. Es gilt niamlich der Satz:
Zwei reelle Gerade Y, Z, die einander nicht schneidenden Linienkreuzen ange- horen, sind (jede in Bezug auf die andere) rechtsgewunden, wenn
(yZ)II > (YZ)2r (21r) sie sind linksgewunden, wenn
( y)2 < ( yZ)2 (211)
Die geometrische Bedeutung dieser Ungleichungen liegt auf der Hand. Der Grenzfall (YZ)_ = (YZ)I vermittelt natiurlich den Uebergang zwischen
beiden Arten der Windung. Insbesondere folgt: Je zwei links-parataktische Gerade, die nicht demselben Linienkreuz angehoren,
sind rechtsgewunden, und je zwei rechts-parataktische Gerade entsprechend links- gewunden.*)
Das Vorgetragene wollen wir nun auf die Kinematik anwenden, und zwar zunachst auf infinitesimale Bewegungen im elliptischen Raume. Eine solche Bewegung wird, wenn sie keine Schiebung ist, infinitesimale Bewegungen beider Bildkugeln zugleich bewirken. Jede dieser beiden Bewegungen kann aber auf- gefasst werden als Drehung um einen eindeutig bestimmten Pol (X,, Xr), die im
positiven Drehungssinne erfolgt. Sind 261% und 2e'r die - nach Voraussetzung positiven-Winkelgeschwindigkeiten der beiden Drehungen, die wir uns ,,quanti- tativ-bestimmt" innerhalb eines sogenannten Zeitelementes dt ausgefiihrt -
denken wollen, so ergeben sich (aus der Formel Nr. 17) im elliptischen Raume zwei entsprechende Grossen 2' und 2I', die wir als Drehungsgeschwindigkeit und Gleitungsgeschwindigkeit der infinitesimalen Bewegung bezeichen wollen, aus den
Gleichungen 0)1 = 9^Y + n12 Or = (22)
Und zwar ist 2,n die auch dem Vorzeichen nach bestimmte Geschwindigkeit, mit der irgend ein Punkt auf dem Bilde X des Polpaares XI, Xr fortschreitet, und 2.' ebenso die Geschwindigkeit, mit der irgend ein Punkt auf der absoluten Polare von X fortschreitet. Die infinitesimale Bewegung selbst erscheint als
*) Durch das Gesagte ist mittelbar ein ,,Windungssinn" erkliirt fur jede reelle nicht ebene oder conische
geradlinige Fliche, insbesondere fiir die Tangentenflitche einer Raumrurve (und damit auch fur diese selbst),
soweit es sich um Stellen allgemeiner Lage handelt, namlich um solche, an denen zwei ,,consecutive" Erzeu-
gende einander nicht schneiden. (Vergleiche die Anmerkung auf Seite 140).
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begriffe Links und Rechts in der elliptischen Geometrie. 135
eine - ebenfalls quantitativ - bestimnmte ,,Schraubung" um den Speer X. Ihre sogennante Wiederholung erzeugt eine gleichfdrmige Schraubenbewegung mit constanter Drehungs- und Gleitungsgeschwindigkeit.
Jede (quantitativ bestimmte reelle) infinitesimale Bewegung, die keine Schiebung ist, und jede solche gleichf6rmige Bewegung, kann als Schraubung urm einen EINDEU-
TIG bestimmten Speer aufgefasst werden. Es kommt ihr eine auch dem Vorzeichen nach bestimmnte Drehungs- und Gleitungsgeschwindigkeit zu *)
Diese beiden Grossen 2a' und 2n' genugen der Ungleichung
a'> I ' I. (23)
Die gleichformige Bewegung ist periodisch, wenn Y' ''eine rationale Zahl ist. Sie reducirt sich auf eine Drehung, wenn n' 0 ist. Beide Bildkugeln rotiren dann mit der Geschwindigkeit 2Y'. Der Begriff der Schraubung umfasst also, nach unserer Erkliarung, den Begriff der Drehung. - Hierzu gehort als Ergiinzung:
Jede (quantitativ bestimmte reelle) infinitesimale Schiebung und jede gleich- foirmige (nicht identische) Schiebung kann auf o 2 Arten als Schraubung urm einen Speer aufgefasst werden.
Alle diese Speere bilden eine EINDEUTIG bestimmte syntaktische Congruenz, und sie alle gehoren zu derselben Drehungsgeschwindigkeit 25' und Winkelgeschwindig- keit 2'7'.
1st die Schiebung linkseitig, so ist '- n'= 0, ist sie rechtseitig, so ist a/ + !' = 0.
Die zugeh3rige Speercongruenz ist im ersten Falle linkseitig, im zweiten recht- seitig.
La'sst man z. B. bei gegebener Schraubenaxe I ' von Null an wachsen, so giebt es im Augenblicke n'= ' noch o2 weitere Axen, darunter die absolute Polare des Speeres X. Wiichst n' weiter, so vertauscht es seine Rolle mit a',
und die Axe ist nicht mehr der Speer X, sondern dessen absolute Polare. Analytisch wird man eine infinitesimale Bewegung am Einfachsten dadurch
ausdrticken, dass man den fruiher eingefuihrten Parametern a,, bi folgende specielle Werthe beilegt:
ao=1, a1, c1dt, a, =a2dt, a3 =a3dt, (24) bo = 1, bi =1ldt, b2 = I2 dt, b3 = f3dt.
* Der Begriff der ,, qualitativ-bestimmten " infinitesimalen Bewegung entsteht durch Elimination des
Zeitelementes dt. Man kann dann nur noch von einem Verhaltniss al : 71P reden.
Nach der bisher geltenden Auffassung hat die infinitesimale Bewegung zwei Axen, die Gerade (nicht Speere)
sind, und nicht weiter untersehieden werden.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

136 STUDY: Beitrage zur Nicht-Euklidi8chen Geometrie. II.
Unter dt wird hier eine Gr6sse verstanden, deren Quadrat gegen dt selbst vernachlassigt wird, und ao, /, bedeuten Grossen, die nicht alle zugleich ver- schwinden. Liegt dann nicht gerade eine Schiebung vor, so ergiebt sich nach einiger Rechnung
e1= V/a2 + a2+ a32 el= V_ /+12 + 32 (25)
wo beiden Wurzelgrdssen die positiven Werthe beizulegen sind, und
Xi = %/__ + A + A _ a,, U. S. W., (26)
X2 = N/a, + o 2 + 3 .? U. S.- W.
Handelt es sich um eine z. B. linkseitige Schiebung, so treten an Stelle der Gleichungen (24, 25) die folgenden:
ao=1, alc=ldt, a2= a2 dt, a3=a3dt, (241) b0=1, b1=O, b2= O, b3= O,
?)=-Va2+al+a2 , 1=, (251)
wahrend (26) der Form nach ungeiandert bleibt, aber nunmehr die Gr6ssen
/1: /2: 33 als willkutrliche Parameter enthalt.
Der Satz, dass jede infinitesimale Bewegung als Schraubung aufgefasst werden kann, lasst sich natiirlich ohne Weiteres auf endliche Bewegungen aus- dehnen. Doch scheint es uns nicht zweckmassig (weil nur innerhalb gewisser Grenzen moglich) auch hier unter den moglichen Schraubenaxen eine bestimmte Auswahl zu treffen.
Denken wir uns (was ohne Weiteres geschehen kann) eine durch eine ortho- gonale Substitution gegebene Bewegung in zwei verschiedenartige Schiebungen mit Parametern ai, bi zerlegt, so erhalten wir zunachst zwei Drehungen der Bildkugeln. Wir wollen annehmen, dass keine von dieseln sich auf die identische Substitution reducirt. Auf der linken wie auf der rechten Bildkugel giebt es dain ein Paar von Punkten X, und Xr, die in Ruhe bleiben. Wir treffen unter ihnen, und den vier zugehlrigen Speeren im elliptischen Raume, irgend eine Auswahl, indem wir in deni Gleichungen
-Z-X= Va2 + a2 + a2. Vb2 + b2 + b2,
X =,%lb_ + b2 + b_. al u. s.w., (27)
X2 = /a 2+a+ala b u. s. w.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begriffe Links und Rechts in der elliptischen Geometrie. 137
den vorkommenden Wurzelgr6ssen irgend welche zulissigen Werthe beilegen. Die zu den Drehungen der Bildkugel geh'origen Drehungswinkel 201, 2Er sind dann bis auf Vielfache von 27c, sonst aber vollkommen, bestimmt durch die Gleichungen
Vs/ag + a' +a2 + a3' sine1= 0 2a+~a (281) ia'+ - a' +aa+ aa2
und durch die entsprechenden Gleichungen fur (3r. iieraus und aus den Gleichungen
E)1 = 5 + Or i (29)
ergeben sich dann der Drehungswinkel 23 und die Gleitungsgrosse 2ry der Schraubung um den Speer X: Diese beiden sind nur bestimmt bis auf Vielfache von 7t, aber - was wohl zu beachten ist - in der Weise, dass ungerade Vielfache von r nur zu beiden gleichzeitig hinzugefulgt werden k'onnen.
Durch Aufldsung der angefiihrten Gleichungen erhailt man umgekehrt die Parameter einer Bewegung, wenn der Speer X als Schraubenaxe und ausserdem - naturlich auch dem Vorzeichen nach - der Drehungswinkel 2. und die Gleitungs- grosse 2n7 gegeben sind:
(30)
ao a, :a2 :a3 - 0ctg ( +): X1: X3: X5, bo bl : b2 : b3 - O ctg (a-v) :2 1 4 2 6:
Welche Aenderungen an einigen dieser Formeln anzubringen sind, wenn die vorgelegte Bewegung in derm bisher ausgeschlossenen Falle sich auf eine Schiebung reducirt, ist ohne Weiteres zu erkennen.
Jede endliche Bewegung kann, wie man sich auszudriicken pflegt, durch eine ilfinitesimale Bewegung ,,erzeugt" werden, und zwar immer auf unendlich viele Arten.
Zunachst nanmlich kann man, im Allgemeinen auf vier Arten, im Falle einer nicht ideintischen Schiebung auf 2. oo 2 und im Falle der identischen Trans-
*) Vielleicht schreibt man diese Formeln besser noch so:
ao(Xo Cos (w + o), a, = X, sin (ig + (u. s. w.)
(wo dann la9i = Ab2 wird).
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

138 STUDY: Beitrdge zur Nicht-Euklidischen Geonmetrie. I.
formation auf oo Arten, einen Speer X bestimmen, um den die Schraubung erfolgen soll. Sodann hat man in den Formeln
(31)
aO af:af :a3 --Xo ctg I(E),+Xc,7t)t Xl : 3 X5, bo: bl : b': bb -X 0 ctg '(O)r + Xr7)t : E2172: X4: X26,
worin xc und x7 irgend welche ganze Zahlen bedeuten, die Parameter einer ein- gliedrigen Gruppe von Bewegungen vor sich, wie man sich sofort iuberzeugen kann. Zwei Transformationen dieser Gruppe werden dadurch nach einander ausgefiihrt, dass man die entsprechenden Werthe des Parameters t addirt. Setzt man t = 1, so reduciren sich die Gleichungen (31) auf die Gleichungen (30), man erhialt gerade die gegebene Bewegung, und zwar bei jeder beliebigen Wahl der ganzen Zahlen xl, xr* Dabei liefern (von dem etwas verwickelteren Fall der Schiebungen abgesehen) jedesmal vier solche Formelsysteme dieselbe Gruppe: Nur bei einier von diesen vier Darstellungsformen erscheint die erzeugende infini- tesimale Bewegung in der ausgezeichneten Gestalt, die wir im vorigen Absatz erortert haben. Jede eingliedige Gruppe aber, die die gegebene Bewegung ent- hiilt, wird von den abgeleiteten Formeln geliefert. Eine besondere Erwiihnung verdient der Fall O3 1--3 _ mod. 7n. Die Bewegung ist dann eine Umwendung. Diese kann, unter Anderem, als Drehung durch den Winkel n um X, aber auch als Drehung durch denselben Winkel um die Polare von X aufgefasst werden. Zwei solche Drehungen hinter einander ausgefiihrt ergeben also die identische Transformation: Hierin liegt der Grund fur die oben hervorgehobene besondere Art der Unbestimmitheit der Grdssen 25, 2n.
Allgemein ist zu bemnerken, dass eine der eingliedrigen Gruppen, die eine vorgelegte Bewegung umfassen, algebraisch (und zwar rational) wird, wenn eines der Verhialtnisse e1: e3r (oder 5: q) eine rationale Zahl ist, und dass sie alle algebraisch sind, wenn die Verhaltnisse (38: er: n rationale Zahlen sind.
Um eine folgende Untersuchung vorzubereiten, fiigen wir noch einige Be- merkungen hinzu ilber den Begrif, der dem Begriff einer gewdhnlichen Schrauben- fliache im Enklidischen Raume analog ist, und demnach von uns durch dasselbe Wort bezeichnet werden soll.*)
*) Dieser Abschnitt kann zuniichst iibergangen werden.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begriffe Links und Rechts in der elliptischen Geometrie. 139
Es sei der Speer X die Axe, oder eine Axe, einer eingliedrigen Gruppe von Bewegungen. Wenn dann die Gerade Y den Speer X, und also auch dessen absolute Polare senkrecht schneidet, so nimmt sie bei den Bewegungen der Gruppe oo1 Lagen an, deren Inbegriff wir Schraubenflache nennen. Es ist klar, dass alle Schraubenfliachen zu einander congruent sind, deren erzeugende ein- gliedrige Gruppen diese Eigfenschaft haben. Charakteristisch fur die (gegen- fiber Bewegungen) invarianten Eigenschaften einer Schraubenflibche ist also das
Verhailtniss -12: 9'2. Ist diese Gr6sse von 0 und o verschieden, so giebt es vier demselben Linienkreuz angehorige Speere X, die als Axen der Schraubenfluiche bezeichnet werden konnen, und, abgesehen vom Falle (3l = ?2, X ' Schrauben- fliachen, die zu der gegebenen congruent sind. Unter den vier Speeren wird einer ausgezeichnet durch die Forderung, dass 0-%1> 0, 3'r > 0 sein soll. Die Schraubenfluiche ist rechtsgewunden, wenn e'2 < -12 linksgewunden, wenn 2>12 Das heisst, je zwei consecutive Erzeugende der Schraubenfliache sind rechts- oder linksgewunden. (S. 134). Im Grenzfall e'2 = e'2 ist die Schraubenfliiche ein unendlich oft ulberdecktes Biischel. Ist dagegen das genannte Verhbiltniss gleich 0 oder gleich w, so giebt es zwei durch den Umkehrungsprocess in einander fuber- gehende Schaaren von je ool syntaktischen Speeren, die sammtlich ,,Axen" der Fliiche sind. Die geradlinigen Triager dieser Speere bilden eine zweite Schrauben- flache, vom entgegengesetzten Windungssinn. Beide Schaaren von oo 1 Geraden liegen auf einer Fliache zweiter Ordnung, einer speciellen sogenannten Clifford'- schen Fliache (die, wie flbrigens alle Schraubenflichen, zugleich Minimalfliache ist, und bei allen Schraubungen einer zweigliedrigen Gruppe in Ruhe bleibt). Solcher specieller Schraubenflaichen giebt es nur oo I Individuen, und alle z. B. linksgewundenen- durch linkseitige Schiebungen erzeugten- unter ihnen sind zu einander congruent. Jede der oo I Clifford'schen Minimalflachen ist Ort aller Punkte, die von den Geraden eines Linienkreuzes gleiche Abstiande (_ i7 mod. 7t)
haben.
Nach Auswahl der orientirten Axe X kommt jeder Schraubenflache eine bestimmte Gangh6he zu, gegeben durch den Ausdruck
t 1-eI+ r 2n7 (32)
dessen geometrische Bedeutung evident ist. Die Gangh1he ist also positiv bei linksgewundenen, negativ bei rechtsgewundenen
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

140 STUDY: Beitraqe zur Nicht-Euklidischen Geometrie. II.
Schraubenfiachen.*) Steht sie zur Zahl n in einem rationalen Verhaltniss, so ist die Schraubenflache geschlossen und algebraisch (iuberdies auch rational). Die absolute Polare einer Schraubenflache ist eine zu ihr congruente Schraubenflache. Beide Fliachen sind identisch, wenn sie algebraisch sind, und uiberdies Y' und >'
sich verhalten wie zwei ungerade Zahlen. Ein Paar absolut-polarer Schrauben- flachen aber, mogen sie verschieden sein oder nicht, kann als Ort von Linien-
kreuzen angesehen werden: Man kann also auch diese zu ,,Schraubenflachen" zusammenfassen. Endlich gehen aus einer gewohnlichen Schraubenflaiche durch den Orientirungsprocess zwei als Oerter von Speeren betrachtete ,,Schrauben- flachen" hervor. Diese haben analytischen Zusammenhang, und sind also identisch, wenn sie algebraisch sind und uiberdies in der reducirten Form des Quotienten vt: b' der Zahler oder Nenner eine von Null versehiedene gerade Zahl ist. Ausserdem miissen wir sie wohl auch als nicht-verschieden erachten, wenn ?q' oder 5' den Werth Null hat.
Um zwei verschiedene gerade Linien Y, Z auf alle m6glichen Arten durch Schraubenflachen zu verbinden, bestimme man zuerst alle Speere X, die Y und Z senkrecht treffen. Ist X ein solcher Speer, und sind Y und Z durch Orien- tirung ebenfalls in Speere verwandelt, so sind dann zuniichst zwei Winkelgrossen 2e1, 2E?r bis auf Vielfache von 2n bestimmt:
2EL (YI, Za), 20r- (JYr, Zr), mod. 2n.
Sodann kann man einen einzigen X und Y senkrecht schneidenden Speer 1 finden, so dass
7t YZ} HI) 2-(Yr fir), mod. 2nt.
*) Hier ergiebt sich, beim Grenziibergang zum Euklidischen Raume, eine Nichtiubereinstimmung mit der
ublichen Terminologie, die den ,,rechts"-gewundenen Schraubenfliichen eine positive Gaglghihe beilegt. Der
Grund hierfiir liegt in einer Inconsequenz dieser Terminologie, die hier zur Sprache gebracht werden muss,
weil sonst unsere Definitionen der Begriffe linksgewunden und rechtsgewunden als unzweckmassig erscheinen
wiirden. Orientirt man das Coordinatensystem so, wie auf Seite 127 beschrieben, so erhailt-nach der uiblichen
Terminologie-eine rechtsgewundene SchraubenZinie eine positive Gangh6he. Ein Paar von rechts-gewundenen
Geraden liegt danu so ZU einander, wie eine Tangente dieser Schraubenlinie und ihre Axe; ebenfalls in
ilbereinstimmung mit den Festsetzungen des Textes sowohl als den ublichen. (S. z. B. Zindler, Liniengeo-
metrie, I, ? 1). Dann aber muss man, wie uns scheint, eine geradlinige Fliche ,,rechtsgewunden" nennen, wenn
oder wo zwei consecutive Erzeugende der Flache rechtsgewunden sind. Daraus ergiebt sich, dass die gewohn-
liche SchraubenflUche, auf der die rechtsgewundene Schraubenlinie liegt, als linksgewunden bezeichnet werden
muss, wahrend sie gewohnlich ,,rechtsgewunden44 heisst. Dagegen ist die Tangentenflhche einer rechts-
gewundenen Schraubenlinie ebenfalls rechtsgewunden. UJmgekehrt wird allgemein eine Raumcurve mit
rechtsgewundener Tangentenflaiche als rechtsgewunden zu bezeichnen sein.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begriffe Links und Reclits in der elliptischien Geometrie. 141
Bewirkt rnan dann noch, dass YO = wird, so bilden die c 1 Geraden mit den Coordinaten
Y1 cos 2 (G1 + xj7t) t + Hl sin 2 (01 + x17t)t Y2cos 2 (e6 + xr7t) t + H2 sin 2 (0, + X,7t) t,
u. s. w. (worin x, und x, gauze Zahlen bedeuten), oder die entsprechenden Speere mit der siebenten Coordinate 4: V/2 YO = A V/2 H0 eine Schraubenfliache, die fur t = 0 die Gerade oder den Speer Y, und fuir t = 1 die Gerade oder den Speer Z liefert, und jede Schraubenflache durch Y, Z kann so gefunden werden.
Man sieht, dass in der Regel zwischen verschiedenen Schraubenflaichen durch Y, Z kein continuirlicher Uebergang m6glich ist. Ebenso aber iubersieht man auch leicht das verwickeltere Verhalten, das dann eintritt, wenn die Geraden oder Speere Y, Z parataktisch sind, oder wenn sie die noch speciellere Figur von zwei Geraden desselben Linienkreuzes bilden.
Nachdem man zur eindeutigen Darstellung der reellen Speere durch reelle Punkte zweier Kugeln gelangt ist, liegt es nahe, die ganze Betrachtung zu vertiefen. Zunachst wird man sie auf das comnplexe Gebiet auszudehnen suchen. Sodann wird man umfassendere Gruppen von Transformationen und weitere Aequivalenzbegriffe einfiuhren, und zwar zuniachst solche Transforma- tionen, bei denen beide Kugeln irgendwie collinear tranformirt (und eventuell auch noch vertauscht) werden.
Setzen wir die Begriffe Gerade und Speer mit Hlilfe ihrer Coordinaten ins complexe Gebiet hinein fort, so wird eine complexe Gerade durch sechs Verhilt- nissgrossen Xi definirt, die der Gleichung (4) genuigen, und moglicher Weise imaginiire Verhialtnisse hlaben. Analog wird ein complexer Speer definirt durch sieben complexe (reelle oder imaginare) Verhaltnissgr6ssen, die den beiden Gleichungen (5) geniugen. Man sieht daraus, dass das Continuum der complexen Speere das Continuum der complexen Geraden in der Weise doppelt utberdeckt, dass die Tangenten der absoluten Fliche, niamlich die Geraden des Complexes
X +X2+X =o, X2+X2+X2=0 (33)
als Verzweigungselemente fungiren: Diese Geraden sind zugleich auch Speere, und jeder solche Minirnalspeer ist nicht zu unterscheiden von dem umgekehrten Speer, da ein Vorzeichenwechsel von X0 bedeutungslos wird, wenn XO ver- schwindet.
19
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

142 STUDY: Beitra,ge zur Nicht-Euklidischen Geometrie. II.
Andrerseits kdnnen wir auch ,,complexe Punkte " unserer beiden Bild- kugeln betrachten: Diese werden ersch6pfend dargestellt durch zwei Systeme homogener complexer Cooadinaten l : t: K3
' und KrO ; 2: K4 t6K die ver- bunden sind durch Gleichungen der Form
(34) 2= _2 2 +2 2 K2 2 + 2
Nun sieht man sogleich, dass der nachgewiesene Zusammenhang zwischlen reellen Speeren und reellen Punktepaaren beider Kugeln sich nicht vollstandig auf die complexen Gebiete iubertragen lasst; denn die Gleichungen
(35)
1o: t1: :3 K XO X: X3. X5, DrO : K2: 6 : XO X2 :X4 X6 die den Zusammenhang zwischen den Punktepaaren gl, ;r und den Speeren X vermitteln, lassen sich nach den Grdssen Xi utberhaupt nicht auflosen, wenn
0o = 0, DO * 0 oder Do, * 0, rO = 0 ist, und sie lassen sich nicht eindeutig auf- 1osen, wenn Klo und KrO zugleich verschwinden.
Hieraus geht nun hervor, dass der Begriff des Speeres (mindestens) zwei natiirliche Fortsetzungen ins complexe Gebiet zulisst: Man kann einmal, wie gesagt, die durch die Gleichung (5) verbundenen Gr6ssen Xi, als Coordinaten eines ,,complexen Speeres" ansehen, dann aber auch die durch die Gleichungen (34) verbundenen doppelt-homogenen Gr6ssen i. Welches auch der noch fest- zustellende begriffliche Inhalt der zweiten Erweiterung sein moge, wir erhalten ein Continuum complexer Speere, das ganz andere Eigenschaften haben muss, als das zuerst genannte. Fur verschiedene Dinge aber braucht man, wenn keine Unklar- heit entstehen soll, verschiedene Worte. Wir werden daher die ,,Speere" des zweiten Continuums nun flberhaupt nicht mehr Speere, sodern Pfeile nennen.
Ein Pfeil wird also dargestellt durch zweimal vier homogene Coordinaten, die durch die beiden Gleichungen (34) verbunden sind.*)
Die Begriffe Speer und Pfeil deciken einander im reellen Gebiete vollstandig, im complexen Gebiete aber nur zum Theil.
Denken wir uns nun z. B. die Punkte
170 :91 ;3 5
der linken Bildkugel irgend einer collinearen Transformation unterworfen, die
*) Wir anticipiren hier die fernere Entwickelung. Eigentlich miussten wir sagen: Der Pfeil ist das System seiner Coordinaten.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begriffe Linlks und Rechts in der elliptischen Geometrie. 143
die erste der Gleichungen (34) bestehen lasst, so gehen aus ebenen Schnitten, also Kreisen, wieder solche hervor. Wir haben die Gruppe der Molius'schen Kreis- verwandtschaften vor uns, die auf der Kugel gedeutet werden. Wir wollen diese Transformationen cyclische Transformationen der Kugel nennen. Verfahren wir ebenso mit der zweiten Kugel, und fiugen wir schliesslich auch noch collineare Vertauschungen beider Kugeln hinzu, (z. B. durch die fruiher betrachteten Be- wegungen), so erhalten wir eine Gruppe, die insgesammt acht continuirliche Schaaren von Transformationen umfasst, da schon jede der beiden cyclischen Gruppen ,,gemischt" ist, namlich aus zwei Schaaren von ,,eigentlichen" und
uneigentlicheall cyclischen Transformationen besteht. Alle diese Transforma- tionen, 8. o 12 im reellen, und 8. oo21 im complexen Gebiete, k6nnen als eindeutige Transformationen der Pfeile, nicht aber auch der Speere aufgefasst werden: Schon eine reelle cyclische Transformation beider Kugeln bewirkt in der Regel nicht eine durchweg-eindeutige Transformation der complexen Speere.
Wir werden also die gefundenen Vertauschungen die Pfeile nunmehr cyclische Transformationen der Pfeile nennen; und insbesondere werden wir durch das Epitheton eigentlich die unter ihnen auszeichnen, die durch Zusammensetzung einer eigentlichen cyclischen Transformation der linken Kugel mit eirner eigent- lichen cyclischen Transformation der rechten Kugel entstehen. Die reellen eigent- lichen cyclischen Transformationen der Pfeile bilden dann eine reell-continuir- liche Gruppe von 0 12 Transformationen, deren jede auf eine einzige Weise in eine iinkseitige cyclische Schiebung (bei der alle Punkte der rechten Kugel einzeln in Ruhe bleiben) und eine mit dieser vertauschbare rechtseitige cyclische Schiebung zerlegt werden kann. Die reellen linkseitigen cyclischen Schiebungen z. B. bilden fur sich eine reell-einfache*) sechsgliedrige invariante Untergruppe der Gruppe
der reellen eigentlichen cyclischen Transformationen. Die complexen eigentlichen cyclischen Transformationen dagegen k'onnen analog auf eiine einzige Weise in vier mit einander vertauschbare Transformationen zerlegt werden, da jede eigentliche collineare oder cyclische Transformation z. B. der linken Bildkugel noch in zwei Transformationen (Schiebungen der Kugel) zerlegt werden kann, deren jede alle Geraden der einen Schaar von Erzeugenden dieser Kugel einzeln in Ruhe lIa'sst. Jede der vier genaunten Arten specieller Transformationen bildet wiederum eine invariante einfache Untergruppe mit sechs (nach der iublichen nicht ganz einwandsfreien Terminologie drei) wesentlichen Parametern.
*) Eine Gruppe heisst einfach, wenn sie keine invariante Untergruppe hat.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

144 STUDY: Beitrage zutr Nicht-Euklidischen Geometrie. II.
Niaher wollen wir die bemerkenswerthe Gruppe der cyclischen Pfeiltrans- formationen hier nicht betrachten; wir wollen aber einige ihrer naichstliegenden Eigenschaften zusammenstellen, um es deutlich hervortreten zu lassen, wie sich die elliptische Geometrie in einen umfassenderen Gedankenkreis einordnet.*)
Zunachst heben wir hervor: Die cyclischen lTransformationen der Pfeile sind in dem Continuum aller Pfeile
iiberall wohldefinirt, eindeutig und stetig. Im reellen, nicht aber durchweg im complexen Gebiete, bewirken sie auch emn-
eindeutige Transformationen der Speere (da deren Begrif hier mtit dem der Pfeile zusammenfdIlt) und also zwei-zweideutige Transformationen der geraden Linien.
Da die Begriffe Syntaxie, Antitaxie, Umkehrung ohne Weiteres auf die Pfeile iibertragen werden konnen, so konnen wir ferner sagen:
Die oo12 ( "24) eigentlichen cyclischen Pfeiltransformationen lassen aus links- (rechts-) syntaktischen Pfeilen immer wieder ebensolche hervorgehen.
Die Eigenschaft zweier Pfeile antitaktisch zu sein, wird dagegen durch diese Transformationen in der Regel zerst6rt. Die Invarianz auch dieser Eigenschaft kennzeichnet die sechlsyliedrige LVntergruppe der Bewegunyen im elliptischen Raume.
Man kann dies offenbar auch so ausdriucken: Die Bewegungen im elliptischen Raume umfassen alle eigentlichen cyclischen
Transformationen der Pfeile, die mit der Umkehrung vertauschbar sind, und deshalb auch als eindeutige Transformationen gerader Linien aufgefasst werden konnen.
Ferner ist evident: Je drei reelle Pfeile, deren keine zwei syntaktisch sind, lassen sich der Reihe
nach in drei andere gleicher Eigenschaft durch eine einzige eigentliche cyclische Pfeiltransformation iiberfidhren.
Vier solche Pfeile haben dem entsprechend vier unabhangige absolute Invarianten, die sich leicht duirch Doppelverhiltnisse darstellen lasseat). Ebenso sieht man ohne Weiteres:
Die cyclischen Transformationen der reellen Pfeile sind z. B. auch dadturch er- schopfend charakterisirt, dass sie die 2. o I Regel.schaaren unter einander vertauschen, die durch Drehung je eines Pfeiles um einen zu ihm syntaktischen Pfeil entstehen.
Diese Umdrehungsorter von je 001 Pfeilen sind augenscheinlich nichts Anderes als die orientirten Regelschaaren sogenannter Clifford'schen Flachen,
*) Weitere Entwickelungen findet man in einer Abhandlung der Verfassers, Jahresber. d. Deutsch. Math. Ver. Bd. 15, 1906, S. 476-527.
t) Siehe einen Aufsatz des Verfassers, Leipz. Ber. 1896, S. 199 u. ff.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begriffe Links und Rechts in der elliptischen Geometrie. 145
deren jede vier solcher Oerter liefert. Man kann sie linkseitige und rechtseitige einfache Cyclen nennen. Es ergeben sich dann weiter Doppelcyclen, Congruenzen von Pfeilen, die, soweit sie reell sind, ersch6pfend durch alle Schraubungen eines Pfeiles um einen anderen entstehen (der nicht zu demselben Linienkreuz gehoren darf), u. s. w.
Wir betrachten nunmehr wieder nur reelle Pfeile oder Speere. Die reellen Pfeile, oder was dasselbe ist, die reellen Speere lassen sich auf
die beschriebene Art auf die reellen Punktepaare unserer beiden Kugeln ab- bilden. Die eirnzelnen Punkte dieser Kugeln kann man aber in bekannter Weise den Werthen von zwei complexen Veriinderlichen zuordnen, die Kugeln lassen sich als sogenauinte Riemann'sche Zahlenkugeln benutzen. So gelangen wir zu einer weiteren Art von Pfeilcoordinaten, die nichts Anderes sind als die passend gewahlten binaren Parameter von Erzeugenden beider Bildkugeln. Die Be- trachtung dieser Parameter eines Pfeiles, wie wir sie nennen wollen, hat aber ein grundsiitzliches Interesse, da durch sie unser Gegenstand mit Problemen der modernen Funktionentheorie in Verbindung gesetzt wird (wie in weiteren Ab- handlungen naher ausgefiihrt werden soll). Wir ftihren aus diesem Grunde hier die wichtigsten Thatsachen vor, die sich auf den Zusammenhang der Pfeil- coordinaten gi uDd der genannten Parameter beziehen. Die eingefuihrte Be- schrankung auf reelle Pfeile wird nachtriaglich sehr leicht aufgehoben werden konnen.
Bei der Durchfiuhrung des bezeichneten Gedankens, und bei seiner An- wendung auf die zuvor entwickelten Formeln, wird man ein- und dasselbe Formelsystem zweimal anzuwenden haben. Deshalb betrachten wir zuniachst eine einzige Kugel, die wir nachher bald mit der linken bald mit der rechten inserer Bildkugeln identificiren werden. Die homogenen rechtwinkligen Coor- dinaten der Punkte dieser Kugel wollen wir g, l, 2 23 nennen, so dass go- 0 die unendlich ferne Ebene darstellt, und die Gleichung der Kugel so lautet:
to = X2 + t2 + t2. (36)
Die zu dem Kugelpunkte g gehorigen cornplexen Verhialtnissgrossen erkliiren wir nunmehr durch die Proportion
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

146 STUDY: Beitrage zi&r Nicht-Euklidischen Geomnetrie. II.
Da es bei den Coordinaten gi auf einen (hier reellen) Proportionalitiatsfactor nicht ankommt, so kann man umgekehrt setzen
90 - U1 + U2i2 t10i2i + E2S2, =J t2-01i2-02 + R(38)
=3 01i1 - 2A2
(E,, bezeichnet die zu i,, conjugirt-complexe Grosse). Eine beliebige lineare Transformation der Verianderlichen j : 2,
ajj1j + a1202, () 02 a2l2l + %22 2
bewirkt jetzt eine sofort hinzuschreibende reelle lineare Transformation der reellen Verianderlichen gi, die eine eigentliche collineare Transformation der Kugel und also eine eigentliche cyclische Transformation (eigentliche Kreisver- wandtschaft) fur deren Punkte zur Folge hat. Umgekehrt kann man, wenn eine eigentliche automorphe Collineation der Kugel (36) vorliegt, daraus ein- deutig die Verhiltilisse der Grossen o,, berechnen. Wir wollen diese Formeln nicht explicite aufstellen, wollen aber von ihnen eine Anwendung machen. Wir wollen niamlich annehmen, es sei insbesondere eine reelle Bewegung
t=aa (40)
vorgelegt, mit den Euler'schen Parametern ao : a, : a2 : a3, die die Kugel (36) Ruhe liisst. Dann findet sich, dass die zugehorigen Coefficienten aLi so aus- gedrftckt werden k6nnen:
a= = aO + ia3, a12 = i (a ia) (41) a2l= i (a, + ia2), a22= ao- ia3 )
Die Determinante A a=i, I dieses Grossensystems hat den Werth.
= a2 + a 2 + all +a 2 (42)
ist also die Norm der Quaternion a. Ersetzen wir nun die Coordinaten
90n _ l 92y _ us_
3
*) Diese oder vielmehr iiquivalente Formeln hat Cayley angegeben (Math. Ann. Bd. 15, 1879, S. 238), sie haben sich aber auch im Nachlasse von Gauss gefunden (Werke Bd. 8, S. 355). Vielfache Anwendung von ihnen hat Herr F. Klein gemacht, z. B. in seinem Buche fiber das Icosaeder.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begriffe Links und Rechts in der elliptischen Geometrie. 147
im Falle der linken Bildkugel durch
;010i ;01) 03) ;5
und im Falle der rechten Kugel durch
gro) (2i 94Y U6)
und unterscheiden wir gleichzeitig die entsprechenden Coordinatenwerthe $1, $2 durch Indices 1, r so haben wir den Satz:
In Pfeilparametern werden die reellen linkseitigen Schiebungen dargestellt durch die Gleichung6n
= (a. + ia3) $,j + i (a -ia,) $12 (431) =1 i(a1 + 1 i(a ) + + (ao -ia3) $12,
und $rl1 =rl $r2 $r2;
ebenso die reellen rechtseitigen Schiebungen durch die Gleichungen
= (bo + ib3) $rl + (bl ib2) $i24
$r2 =i (bl + ib2) $rl + (bo ib3) - r2i (43r)
und f11 = t 1)12 2
Die reellen Yerhaltnissgr6ssen a, und b, sind die Cayley'sclhen Schiebungs- para meter. (Vgl. S. 122, Nr. 10-12).
Der Nutzen, den die Pfeilparameter bringen, ist offenbar ein doppelter. Erstens nilmlich werden die beiden quadratischen Gleichungen (34) nunmehr zu Identitaten. Es ist aber principiell einfacher, mit von einander unabhangigen' Veranderlichen zu operiren, als mit solchen, die durch (wenn auch nur quadra- tische) Gleichungen verbunden sind. Gleichguiltig hierfiir ist es offenbar, ob man, wie wir es thun, die vier unabhiangigen wesentlichen Veriinderlichen paarweise zu sogenannten complexen Grossen zusammenfassen will, oder nicht. Diese Zu- sammenfassung selbst aber, die iubrigens keineswegs unter allen Umstiinden zu empfehlen ist, bietet einen weiteren Vortheil: Es treten auf diese Weise klar die engen Beziehungen hervor, die unseren Stoff mit sonst schon als wichtig erkannten Gegenstanden der Funktionentheorie und Gruppentheorie verbinden. Soweit die Bewegungsgruppe in Frage kommt, handelt es sich hierbei vor Allem um einen Zusammenhang unserer Theorie mit der Theorie der (binaren) soge- nannten Hermite'schen Formen.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

148 STUDY: Beitrige zur Nicht-Euklidischen Geometrie. II.
Fuihren wir die Zeichen ) =1 + 2-12, (44)
Wn/t- I 1 + 0M25
ein, so hat jede der beiden Gleichungen (f w)=0, (= /) =0 eine einfache geo metrische Bedeutung. Die erste sagt aus, dass die Punkte i, n der Kugel (36) zusamnmenfallen. Die zweite Gleicliung aber sagt aus, dass die Punkte i, n ein- ander diametral gegenuiberliegen. (Vgl. Nr. 38). Das liisst sich, ganz abgesehen von der Deutung auf der Kugel, auch so ausdriicken, dass man sagt: Die Punkte q, n sind einander paarweise zugeordnet in dern ,, Polarsystem" einer (definiten)
Hermite'schen Form (oder, nach Segre, in einer Antinvolution ohne Doppel- elemente). Denn es ist leicht zu sehen, dass alle projectiven Spiegelungen an Punkten uud Ebenen, die die Riemann'sche Kugel (36) in Ruhe lassen, mit Hullfe der biniaren Veranderlichen dargestellt werden konnen durch bilineare Gleichungen der Form
0111)71 + C12$172 + C2102n1 + C222:2 = 0?
Wo cc = ci,, C102 -C12C21 * 0 ist, und $, V7 in der Spiegelung einander zugeordnete Kugelpunkte bedeuten. Diese Gleichung aber ist, gegenuiber cogredienten linearen Transformationen der Veranderlichen 0,, 02 und nl, 72 invariant, ver- bunden mit der sogenannten Hermite'chen Form
C1jEl$1 + C12$1$2 + 021i2i1 + C2202E2
Sie ist aus ihr durch einen Process abgeleitet, der nahe verwandt ist dem sooenannten Polarenprocess, durch den man z. B. von einer quadratischen Form aus zu deren Polarsystem konimt. Nun sieht man unmittelbar, dass bei der Transformation (41) beide Ausdriucke (44) mit dem Factor A reproducirt werden. Der erste Ausdruck wird auch dann noch reproducirt, wenn die Grdssen oi,K beliebige complexe Werthe haben (so dass A * 0). Wenn aber auch der zweite diese Eigenschaft haben soil, dann miissen, wie eine leichte Rechnung zeigt, die Coefficienten ao., von einem gemeinsamen complexen Factor abgesehen, die Form (41) haben.
Alles dies haben wir zweimal anzuwenden; wir erhalten dann, bei Gebrauch der bereits erklarten Abkiirzungen, die Gleichungen
(tvq)z-a *(Mt') (W/l)F) =A (0/tt)z 45 )= Ar . (4)r, (d'/n1')r = Ar* ($/1)r
Die den reellen Schiebangen des elliptisechen Raumes entsprechenden projectiven Transformationen der binaren Gebiete (ri), ($r) lassen jede ein gewisses fermite'sches Polarsystem (eine Antinvolution) in Ru he, und sie sind dadurch characterisirt.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begriffe Links und Rechts in der elliptischen Geometrie. 149
Auf jeder von beiden Bildicugeln ordnet das zugehbrige Polarsystem irgend einem Punkt den diametral-gegeniberliegenden Punkt Zu.
Nebensichlich ist bei diesem Satze die besondere Form der Gleichungen = 0; diese wiurde sich in mannigfacher Weise andern lassen. Wir haben
offenbar, bei Aufstellung der Gleichungen (37), eine willkiirliche Auswahl unter 3 Moglichkeiten getroffen. Wesentlich aber ist die Zugeh6rigkeit dieser
Gleichungen zu definiten Hermite'schen Formen. (Zu verlangen, dass ausser ihren Polarsystemen auch die Hermite'schen Formen selbst reproducirt werden sollen, scheint in unserem Zusammenhang nicht erforderlich und im Ganzen auch nicht zweckmassig zu sein).
Es hat sich also eine enge Beziehung der elliptischen Geometrie, und dainit auch der zugehorigen Theorie der Bewegungsinvarianten, zur Geoimetrie und Invariantentheorie der Polarsysteme Herinite'scher Formen ergeben. Auf die allgemeinen Fragen, zu denien man von hier aus kommt, denken wir ein anderes Mal einzugehen. Hier betrachten wir nur noch einige der nachstliegenden Beziehungen: Den Invariantencharakter dieser lassen wir dadurch hervortreten, dass wir die fiir den vorliegenden Zweck ausreichenden Zeichen (44) systematisch verwenden.
Zunkchst ergeben sich jetzt bemerkenswerthe Ausdriucke fur Winkel und Abstand zweier Speere Y, Z oder t, . Es gilt namlicli ffir beide Bildkugeln die Gleichung
(9)(n/04 (n1/0 (nO4 (1). (46) Ausserdem aber hat man die Identitiat
(n / 1) * (X /;) -- (n / O ()-1/ O (n4 (o ; (47)
Hieraus folgen weiter, z. B. fur die linke Bildkugel
,)IOl + (9) 2 (n/Z)1 t;1,(81 blOIOD (95 (48 1) (
und
cos i(tjp, 5)=s V(t/r) v (49, 1)
SiD~~~~~~.//?\/?
*) Diese Formeln bilden den Ausgangspunkt fuir weitere Untersuchungen Math. Ann. Bd. 60, 19(5, S. 321.
20
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

150 STUDY: Beitrage zur Nicht-Euklidischen Geometrie. IL.
Die zuvor von uns aufgestellten Forineln Nr. 19 haben Cosinus und Sinus nicht der halben, sonidern der ganzen Winkel (t, ^), und (p, ?)r geliefert, haben diese aber eindeutig bestimmt. Es bleibt daher noch die iolle der Wurzel- grossen in den Gleichungen (49) aufzuhellen.
Die Moglichkeit, uiber das Vorzeichen z. B. der Grosse sin (Y, Z), in den Formeln (19) zu entscheiden, entspricht nun der M6glichkeit, unter den beiden Polen des Hauptkreises durch die Punkte YI, Z, einen auszuwahlen. Das kann auch bei Gebrauch von Coordinaten zweiter (und dritter) Art erfolgen (vgl. Nr. 35): Man hat, entsprechend den Formeln
90 : 1 = '(*)1 (^)l - (8)13 335 - 85J3
u. s. w. einen der Wurzelwerthe
7 (88)1 (55)t-QS)1 = (50, 1)
auszuwTvhlen. Durch Entscheidung fiber den Werth de8 Productes der beiden letzten reellen Wurzelgrossen wird mrithin der Speer X, besser der Pfeil gl, g, eindeutig festgelegt. Der Werth desselben Productes aber entscheidet auch fiber das Vorzeichen von sin (t, ;),. Der Werth einer der beiden ietzten Quadrad- wurzeln bleibt dann noch willkuirlich, und Iiisst in Verbindung mit den beiden Wurzelgrossen ini Nenner der Ausdruicke (49, 1) den Gr6ssen cos a (, ) und sin A (i, ) eben den Spielraum, den wir haben miussen, wenn wir sin (9, ) als eindeutig bestimmt annehmen.
Auch die auif die Eigenschaften der Bewegungen im elliptischen Raume bezuglichen Ausdruicke gehen nun in solche uiber, denen man ihre Eigenscliaft als Invarianten biniarer Formen sogleich ansielht, wie indessen nicht weiter aus- gefuihrt werden soll.
In das Bild, das wir hier von der Geometrie der Speere und Pfeile zu ent- werfen gedachten, haben wir nun noch einen letzten aber wesentlichen Zug einzutragen.
Erinnern wir uns, dass die zu den beiden Bildkugeln gehorigen complexen Verhaltnissgr6ssen :11' 12 und $rl: $r2 die Parameter von je einer Schaar von geradlinigen Erzeugenden der zugehdrigen Kugel sind. Unterwerfen wir nun
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begriffe Links und Rechts in der elliptischen Geometrie. 151
jede Kugel einer Bewegung, so werden diese Paratmeter linear transformirt. (Nr. 43). Dabei werden die auf den uniendlich fernen Ebenen o = 0 und
XrO = 0 gelegenen imaginiiren Kugelpunkte nur untereinander (projectiv) ver- tauscht. Diese Punkte aber sind, wvie die Gleichungen (20) zeigen, eindeutig und naftirlich auch gegenuber zusammengeh6rigen Bewegungen invariant zugeordnet den linkseitigen und rechtseitigen Erzeugenden der absoluten Flache.
Die zur linken (rechten) Bildku gel gehdrigen complexen Parameter kannen also auch als Parameter der linkseitigen (rechtseitigen) Erzeugenden der absoluten Flache betrachtet werden.
Za conjugirt-imagin&ren Erzeugenden der absoluten Fldche gehoren diametral- gegenilberliegende Punkte der Bildkugeln, und also Parameter, die einander in den entsprechenden Hermite'schen Polarsystemen zugeordnet sind.
Die Formeln (43) zeigen, wie die Erzeugenden beider Arten durch die reellen Bewegungen vertauscht werden.
Ohne Weiteres ergiebt sich der Zusammenhang zwischen den Coordinaten Xi (No. 20) und den Parametern 0,, beider Schaaren von Erzeugenden. Man hat zu diesem Zwecke nur in den Gleichungen (38) die Verhaltnissgr6ssen E1: t2
durch irgendwelche Gr6ssen n, : n2 zu ersetzen, und diese dann so zu bestimmen, dass 0= 0 wird; man hat also etwa an Stelle von ij und 02 die Werthe 02
und 0j einzutragen. Auf beide Kugeln angewendet, liefert dieses Verfahren die Coordinaten der zweierlei Erzeugenden X(j) and X(r) der absoluten Fliache, dargestellt durch die Parameter $:
11i 61 122 2 12 ?
X13 { 1 +2, X14 0( l X16 2 i 11 012 X16 = ?;
Xri Xr2 = 2
Xr3-0 Xr4 jrl + ,r (51 r)
Xr50? Xr6 2 (rl gr2 Umgekehrt folgt
(52)
E11 12 = Xll - iX13: - X1 = X165 Xll + i';Xi3,
grl r2 = Xr9 Xr4 - Xr6 =TX,6 Xr2 + iXr4
Man sieht, dass bei einem Uebergang zu der conjugirt-imaginaren Erzeugen- den die Parameter 0j und 02 durch 02 und - j ersetzt werden.
Weiter zeigt nun eine leichte Ueberlegung, dass der reelle Speer X oder Pfeil K,, Kr, also der Pfeil mit den Parametern f 12 und cr1: ,r2, die vier
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

152 STUDY: Beitrage zur Nicht-Euklidischen Geometrie. IL.
soeben betrachteten Erzeugenden der absoluten Flaiche schneiden muss. In der That findet sich mit Hiulfe der Gleichungen (35) und (38), wenn man diese letzten nach der gegebenen Anweisung verwerthet (vgl. unten Nr. 54), dass
(-x5)1- ?t (X=")7.=? (53)
ist fur 5 = X(1), X(r) X(), X4) . (S. Nr. 51). Daher muss die Gerade des reelleni Speeres X entweder den Schnittpunkt der beiden ersten unter diesen vier Erzeugenden mit dem Schnittpunkt der beiden letzten verbinden, oder die Ebene der beiden ersten mit der Ebene der beiden letzten. Um zwischen diesen beiden Denkmoglichkeiten die Entscheidung zu treffen, geniigt es, etwa den gemeinsamen Punkt und damit auch die Ebene der Geraden X(e), X(r) zu finden. Es ergeben sich dann aber sogleich alle Schnittpunkte und gemeinsamen Ebenen der vier Geraden, und es kann ausfindig gemacht werden, welche von ihinen mit dem Speer X oder Pfeil g>, r C vereinigt liegen. Diese stellen wir nunmehr zu- sammen; zu grosserer Bequemlichkeit fulgen wir auch die Coordinaten des Speeres X ausgedriickt als Funktion der Parameter $ und die durch Aufiosung hieraus entstehenden Gleichungen hinzu.
Um einicermaasen lesbare Formeln zu erzielen, schreiben wir an Stelle
von TI(
einfacher l, rK.
Die Coordinaten der zwei Punkte und der zwei Ebenen, die dem Speer oder Pfeil X und ausserdem der absoluten Flache angehoren, unterscheiden wir ebenfalls durch Indices I und r. ITwiefern das berechtigt ist, soll sogleich dar- gelegt werden.
(54). Coordinaten des reellen Pfeiles g,, ausgedri&ckt durch des8en Parameter:
;lo = III, + 1212, grrO rlr + r2r2,
=1 = 14'2 + 1211, t2 = r1r2 + r2rl
- 3 = 1112 1211, - 4 -lr2 r2r,
g5 =,1[,112 g6 = r1r1 -r2r2.
Die zugehorigen Speercoorditnaten haben diese Werthe (oder sind zu ihnen proportional):
Xl 0 1 X3 ;rO = b: X6 X = :rrO * ;5X
X2 =b10 *,2 274 =10 *4 6 = ' 96'
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begriffe Links und Rechts in der elliptischen Geometrie. 153
(55). Parameter eines reellen Pfeils ausgedrikckt durch die Pfeilcoordinaten:
11 .4 t10 + 5 91 + i93 =-91 3 i lO-5
ri: r2 grO + b6 2 + '9t =2 i4 KrO4 - 6
(56). Fbenen der absolaten Flache datrch den reellen Pfeil (1, r):
UO i= 1 r2 12r1 Linkseitige
U11= {l1rl -7r2 t Ebene; u12 = ill1r1 + 12r2 , Erzeugende
U13- Qlr2 + 12r. j Y(), -X(r)X
UrO = 1,r2 -12r1 '1 Rechtseitige
Url llrl l2r2 , Ebene; {Erzeugende tXr2 = -ij1,rj + l2rI2 9
Ubr3 = 4 11r2 + 12r4 .A?), X(r) )
(57). Punkte der absoluten Flache auf dem reellen Pfeil (1, r):
= - i li + 12r2 K Linkseitiger xII, 11r2 + 12rj } , Punkt;
x12- i l;:2-l2rl { Erzeulgenide
X13- II rl - 1r, } , (I) 1 X(r)
XrO = i{llr1 + l2r2} , 1 Rechtseitiger
Xrl Z1jr2 + 12rj, Punkt;
Xr2= ---ilr2-?2r1E, F Erzeugende Xr = - 'I1r 2j
Xr3- 1lrl - 12r2, () X (r)
Es folgt hieraus zum Beispiel:
XrO Xll - X10 Xrl + Xr2 X13 - X12 Xr3 igrO *1
XrO Xll XIO Xrl Xr2 X13 + X12 Xr3 i?lo *2
U,r2 U13 U12 Ur3 + UrO Ull U UlO U=rl irO ' X Ur2 U13 -U12 Ur3 -U UrO U1 + UlO Url llO *2 I
Die Formeln (55)-(57) zeigen nuninehr, dass man nach Adjunction de Irrationalitiit /- 1 die Punkte und Ebenen, die einem reellen Speer oder Pfeil und zugleich der absoluten Fliache angehoren, rational trennen kann. Ferner
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

154 STUDY: Beitrage zur Nicht-Eaklidischen Geometrie. II.
ist deutlich, dass die gegenseitige Beziehung dieser Figuren durch reelle Beweg- ungen nicht zerstdrt werden kann, dass es unmoglich ist, z. B. die Figuren X und ur gleichzeitig init den Figuren X und u, zur Deckung zu bringen. Daraus allein aber ergiebt sich natiirlich noch nicht, dass es einen Sinn hat, die beiden Ebenen ur und u, durch die Epitheta rechts und links unterscheiden zu wollen, und ihnen diese Epitheta gerade in dieser Reihenfolge anizuheften.
Wir betrachten nun eine Ebene u, die sich um den Speer X im positiven Sinne drehen moge. (p sei der Winkel zwischen dieser Ebene und einer be- stimmten Ebene durch X, so dass wachsenden Werthen von qp der Umlauf im positiven Sinne entspricht. Setzen wir dann die Veriinderliche cp ins complexe Gebiet fort, so erhalten wir das ganze Biindel der reellen und imaginairen Ebenen durch X, mit Ausnahme der beiden, die der absoluten Flaiche angehoren. Diese beiden Ebenen aber entstehen duirchl je einen Grenziibergang. Die eine wird erhalten, wenn man in cp = 4 + i% die reelle Grosse X uiber alle Grenzen wachsen, die andere, wenn man sie unbegrenzt abnehmen liisst (4' = const., z = + ? , X = - ce). Deutet man 4 und X in fiblicher Weise in der Gauss'schen Ebene (4'-Axe nach rechts, X-Axe nach oben) so geht man im ersten Falle nach links von der im positiven Sinne durchlaufenen 4'-Axe, im zweiten nach rechts. Deutet iian andrerseits, wiederum in der Gauss'schen Ebene, die Veriinderlichen 4 und X so, dass X 0 ist auf dem Einheitskreis, und 4 dessen Bogen bedeutet, bei positiver Umlaufung des Kreises (entgegengesetzt dem Sinne des Uhrzeigers) so werden dadurch den Grenzwerthen X = + 0,
X' - oo der Reihe nach die Punkte 0 und co der Zahlenebene zugeordnet: diese liegen aber wieder links und rechts von dem im positiven Sinne durch- laufenen Orte X = 0. Von der letzten Deutung endlich kann man zur Zahlen- kugel uibergehen. Diese werden wir in gleicher Weise orientiren, wie unsere beiden Bildkugeln (was zwar keine Nothwendigkeit, aber das Niachstliegende ist). Sie geht dann in die Zahlenebene, deren Einheitskreis den Aequator der Zahlen- kugel ausschneiden m6ge, fiber durch stereographische Projection aus dem Sadpol. Die Bilder der Punkte 0 und o sind nun auf der Kugel Nordpol und Suidpol, da der positive Drehungssinn auf dem Aequator der von West nach Ost sein soll. (S. 127.) Wieder liegen also die Bilder der beiden ausgezeichneten Ebenen in Bezug auf den orientirten Aequator link7s und rechts.
Wir wissen also nun, dass es einen Sinn hat, die beiden Ebenen (X + oc) und X = - oo ), mit den Beiwortern links und rechts in Verbindung zu setzen, und. es bleibt nur noch festzustellen, welche der unter (56) bezeichneten Ebenen
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begriffe Links und Rechts in der elliptischen Geometrie. 155
dem Grenzubergang (X = + oc ) und welche dem Grenzubergang (X - c ) entspricht. Dies kaiun an irgend einem Zahlenbeispiel ausgefiihrt werden, z. B. an diesem: 11 = 12 - r= r= = 1. Es ergiebt sich daun die Zuordnung von ut und
(Xz+ cc ), uund (x - ). Ebenso lassen sich die bei den Formeln (57) angebrachten Bezeichnungen
rechtfertigen. Wir fassen nun das Wesentlichste dieser ITeberlegungen zusammen: Die Bestimmung der Ebenen und Pu,nkte der absoluten Flache, die einem reellen
Speer oder Pfeil angehoren, verlangt nur die Adjutnction einer numerischen lrratio- nalitat, nGimlich der imagindren Einheit.*)
Die reellen Speere oder Pfeile X und z. B. die imaginaren Tangentialebenen u der absolutten Flache lassen sich (autf zwei Arten) in eine wech4selweise EINDEUTIGE
Beziehung setzen, derart, dass der Speer X in der Ebene u liegt, also deren reelle Gerade igherdeckt.
Die beiden Tangentialebenen durch X konnen durch die Epititeta links und rechts unterschieden werden.
Die linkseitige Ebene u1 z. B. ist dadurch bestimmt, dass sie in dem Gauss'- schen oder Riemann'schen Bilde des (zweidimensionalen) Buschels aller reellen und imagindren Ebenen durch X LINKS liegt, wenn man die reellent Ebenen dieses Biuschels im positiven Sinne durchllauft.
Eine der genannten Zuordnungen wird dann durch die Festsetzung bewirkt, dass dem Pfeil X stets dcie ihn enthaltende LINKSEITIGE Tangentialebene ul der absoluten Flche entsprechen soll, und urnigekehrt.
Die conjugiirt-tmaglndre und also rechtseitige Ebene ur entspricht dann dem utmgekehrten Pfeil, in Bezug auf den sie linkseitige Tangentialebene ist.
Man bestatigt das durch leichte Rechnung mit Hiilfe der Formeln (55), (56). Schliesslich ergiebt sich noch eine weitere wichtige Folgerung. Jede Tangentialebene ut der absoluten Fiiache enthilt zwei Erzeugende X(t)
und 2(r) dieser Flaiche, und diese haben auf den beiden Zahlenkugeln genau dieselben Bilder 41 und gr oder 27 und X2 wie der reelle Speer oder Pfeil X, der zu u, gehort, nach der friiher ausgeftihrten Zuordnung. Unterwirft inan nun die Ebene u1 einer beliebigen Bewegung mit complexen Paramlietern, so werden die Erzeugenden X(O), 2(r) in allgemeinster Weise linear transformirt. Die
*) Ist die absolute Flaehe nicht in der von uns vorausgesetzten Form dargestellt, sondern durch eline nicht-specialisirte quadratische Form gegeben, so tritt an Stelle dieser Gr6sse die Quadratwurzel aus der negativ genommenen Discriminante dieser Form.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

156 STUDY: Beitrage zur Nicht-Fuklidischen Geometrie. IL
Parameter g11: 0l2 und i,,: gr2 unterliegen jetzt der allgemeinsten linearen Trans- formation. Die Bildkugeln werden eigentlich-collinear transformirt, und die Speere oder Pfeile X werden dadurch einer eigentlichen cyclischen Transfor- mation unterworfen (S. 143).
Die eigentlichen cyclischen Transformationen der reellen (Speere oder) Pfeile k5nnen also auch in folgender Weise erkl&rt werden:
Jede Tangentialebene der absoluten Flache hat nach Obigem ein eindeutig be- stimmntes Bild in dem ihr zihgeordneten Pfeil. Unterwirft man nun die Tangen- tialebenen den o 12 reellen und complexen Bewegungen d,es elliptischen Raumes, so werden die zugehorigen Pfeile entsprechend vertauscht, und zwar durch die Oo12
reellen eigentlichen cyclischen Transformationen. Die 2. oo 6reellen und complexen Schiebungen liefern auf diese Weise die beiden
Arten cyclischer Schiebungen im reellen Pfeilcontinuum. (Vgl. S. 143).
Bis hierher haben wir den gelegentlich verwendeten Begriff ,,complexer Pfeil " nur darch ein System von zweimal vier oder viermal zwei homogenen Coordinaten, also formal erklart, walhrend wir fur den verwandten Begriff des complexen Speeres eine Zuriuckfiihrung auf bekaiunte Begriffe der (complexen) Nicht-Euklidischen Geometrie zur Verfiugung hiatten. Nunmehr ergiebt sich eine entsprechende Deutung auch fur den Pfeil.
Setzen wir namlich in die Formeln (54) - (57) statt der conjugirt-complexen Verhaltnissgrdssen 11 : 12 tind 11: 12 , ri : r2 und r1 : r2 beliebige Verhaltniss- grossen ein, so erhalten wir statt der conjugirt-imaginaren Ebenen ul, ur und Punkte xi, x, irgend welche in bestimmte Reihenfolge gesetzte Ebeneni und Punkte der absoluten Flache, die in der angezeigten Weise durch ein auf dieser
Flache verlaufendes Vierseit X(j), X(r), X(O, X(r) von nunmehr ganz beliebigen Erzeugenden verbunden sind. Zwischen dieser Figur und den Pfeilcoordinaten besteht eine eindeutig-umkehrbare Beziehung. Wenn wir wollen, kdnnen wir daher sagen: Diese Figur ist der Pfeil.
Da die Anordnung der beiden Punkte x1, Xr auf dem Pfeil der Anordnung
der uibrigen Figuren u,, u,. und X(1), X(,), X(j), X(,) vollkommen bestimmt, so wollen wir - mit Rutcksicht auf die in einer spateren Arbeit zu behandelnde hyperbolische Geometrie - nur von diesen Punkten reden. Auch scheint es uns
zweckmassig, die Punkte xl, x,; statt durch die Worte links und rechts, die sich
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begriffe Links und Rechts in der elliptischen Geometrie. 157
auf den Fall reeller Pfeile des elliptischen Raumes beziehen, allgemein durch die Worte Anfang und Ende des Pfeiles (oder Speeres) zu unterscheiden. Dann k6nnen wir also sagen:
Ein (reeller oder complexer) SPEER kann in der Regel aufgefasst werden als eine gerade Linie, deren beide Schnittpunkte wnit der absoluten FlJlche bekannt utnd als Anfang x, und Entde xr des Speeres in eine bestimnmte Reihenfolge gebracht sind.
Fallen jedoch diese Schnittpunkte zusammen, oder sind sie unbestimmt, so fallt der Begriff des Speeres zu-sammen mnit dent Begriff einer Geraden (namlich einer Minimalgeraden oder insbesondere einer Erzeugendent der absoluten Flache.)
Ein (reeller oder complexer) PFEIL dagegen IST emn Paar von Punkten der ab- soluten Flache, die als Anfang x, und Ende xr des Pfei/es bestimmt geordnet sind.
Der Begriff des Pfeiles fdillt also niemals zusammen mit dem einer geraden Linie.
Es ergiebt sich nunmehr die gegenseitige Beziehunag der Begriffe Speer und Pfeil, die wir in folgender Tafel darstellen:
0o 8 Speere ,,allgemeiner Lage," darunter die oo I reellen Speere des elliptischen Raumes.
0o 8 Pfeile ,,allgemeiner Lage,"
darunter die 0 4 reellen Pfeile des elliptischen IRaumes.
Je zwei solche Speere oder Pfeile gehoren zur selben Geraden, die nicht Minimalgerade, nicht Tangente der absoluten Flache ist.
0o6 ,fMinimalspeere allgemeiner Lage.'
Zu jeder Tangente, die nicht Erzeugende ist, geh6rt eitn solcher Speer.
2. oo I Erzeugende der absoluten Fla,che, deren jede ein specieller Minimalspeer ist.
Die beiden letzten Classen bilden zusammen den Complex aller Mini- malspeere.
X4 ,Punktpfeile," das sind Pfeile, deren jeder denselben Anfangs- und Endpunkt xl- x hat. Sie ent- sprechen auch den Speeren der niachsten Classe.
2. X 6 ,accesworische Pfeile" nDam- lich Punktepaare XI t Xr die durch (mindestens) je eine Erzeugende der absoluten Flache verbunden werden k6nnen, darunter die zuvor ge- nannten Punktpfeile.
Im Pfeilcontinuum gibt es also, an Stelle des einen absoluten Gomplexes, der
von den Minrimalspeeren oder Mininalgeraden gebildet wird, zwei accessorische Complexe, die (wie die Erzeugenden der absoluten Fliache) durch die Epitheta links und rechts zu unterscheiden sind. Diese beiden Complexe durchdringen
21
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

158 STUDY: Beitrage zur Nicht-Eutklidisclhen Geometrie. II.
einander in der absoluten Congruenz, die von allen Punktpfeilen gebildet wird, und in der Speermannigfaltigkeit kein Analogon hat.
Alle diese Figuren bleiben in Ruhe bei den oo12 complexen Bewegungen. Das achtdiinensionale Continuumn aller complexen Pfeile hat, im Sinne der
Analysis Situs, eben denselben Zusammenhang, wie das Continuum aller Quadrupel reeller Punkte, die man einzeln vier reelen Kugelflaichen entnehmen kann.
Es ist selbstverstandlich, dass es algebraische Punktmannigfaltigkeiten giebt, die vollkommen eindeutig, umkehrbar und stetig auf das Speercontinuum abge- bildet werden konnen, und andere, die ebenso auf das Pfpilcontinuum abgebildet werden konnen. Wir werden (in der folgenden Abhandlung) solche Mannigfal- tigkeiten nachweisen, die noch weitere bemerkenswerthe Eigenschaften haben.
Natiurlich kann man die Reihenfolge unserer Betrachtungen umkehren. Man kann mit der Parameterdarstellung (51) der Erzeugenden der absoluten Flaiche beginnen. Von dieser kommt man dann sogleich zu dein Begriffe des Pfeils. Die Gruppe aller eigentlichen cyclischen Transformationen der Pfeile wird dann wie folgt zu erkliren sein:
Eigentliche cycli.sche Transformationen der Pfeile sind solche, die Anfangs- und Endpunkt etnes jeden Pfeiles demn Anfangs- und Endpunkt des entsprechenden Pfeiles durch irgend zwei (complexe) Bewegungen zuordnen.
Die so erklarte nach der uiblichen Terminologie zwdlfgliedrige, in Wirk- lichkeit vierundzwanziggliedrige Gruppe hat vrier paarweise vertauscbbare sechsgliedrige invariante Untergruppen, und daher im Ganizen vierzehn invari- ante continuirliche oder sogenaunte gemischte Untergruppen, von denen aber hier, wo die reellen Figuren im Mittelpunkt der Betrachtung stehen, nur zwei zur Sprache gekommen sind. Es sind dies die folgenden:
1) und 2). Die beiden Gruppen mit je zwolf reellen oder sechs complexen wesentlichen Parametern, die links- oder rechts- syntaktische Pfeile in eben- solche fiberfuthren: Die beiden Gruppen cyclischen Schiebungen.
Ausser diesen kommen noch besonders in Betracht gewisse nicht- invariante Untergruppen, niimlich:
3). Die Gruppe der Bewegungen selbst, die von zwolf reellen oder sechs complexen wesentlichen Parametern abhiingt.
4). Die Gruppe der co 12 cyclischen Transformationen, bei denen Anfangs- und Endpunkt eines jeden Pfeiles conjugirt-complexen Bewegungen unterworfen werden: Die Gruppe der reellen eigentlichen cyclischen Transfoxmationen.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Die Begriffe Links und Rechts in der elliptischen Geometrie. 159
Man sieht, dass ein solcher Entwickelungsgang, der natiirlich ebenfalls zu den Speeren unld ihren spharischen Bildern fuihrt, seine systematischen und vielleicht auch piadagogischen Vorziige haben wird. Indessen schien es uns doch angezeigt, die Einfiihrung imaginairer Figuren so lange als moglich zu vermeiden.
Das niachste Ziel dieser einleitenden Abhandlung glauben wir nunmehr erreicht zu haben.
Eine besondere wichtige Folgerung, die sich unmittelbar ergiebt, ist die, dass die cyclischen Transformationen der Pfeile (genauer eine zu dieser Gruppe iihnliche Gruppe, und ulbrigens noch viel umfassendere vorliufig unberiihrt gelassene Gruppen von Transformationen) auch aus der Geometrie des Iyperbolischen Raumes abgeleitet werden konnen. Dieser Gegenstand soil, mit Anwendungen auf Differentialgeometrie, in einer folgenden Abhandlung darge- legt werden.
Eine andere Erweiterung der vorgetragenen Theorie wollen wir wenigstens noch anhangsweise erwiahnen.
Der Verfasser bezeichnet mit dem Worte Soma die Lage eines starren K6rpers. Es kann nun das Soma im elliptischen Raume durch Coordinaten dargestellt werden, die vollig analog sind denen eines Linienkreuzes (niimlich durch die doppelt-homogenen reellen Parameter ai und bL), und ebenso das Soma im spharischen Raume durch Coordinaten, die analog sind denen einer Geraden (dieselben Parameter, verbunden durcll die quadratische Gleichung N(d) = N(b)). Endlich k6nnen die Somen im hyperbolischen Raume durch ebensolche Coordinaten dargestellt werden, wie die complexen Punkte eines projectiven Continuums, abgesehen von einer gewissen Ungleichung, durch die die ool Punkte einer Fliache zweiter Ordnung ausgeschlossen werden.
Das Soma aber ist der Grundbegriff der Kinematik. Die Nicht-Euklidische Kinematik kann also in allen Fallen aus Begrifen
entwickelt werden, die nur durch die Dimensionenzahlen sich unterscheiden von solchen, mit denen wir es in der vorliegenden Abhandlung zu thiun hatten.
Wie das geschehen kann, dariuber findet der Leser Andeutungen in des Ver- fassers Geometrie der Dynamen (?40, und Anhang, S. 535-594), wo der (ziemlich viel verwickeltere) Fall der Euklidischen Kinemnatik nach solchen Grundsatzen behandelt worden ist.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

160 STUDY: Beitrtige zur Nicht-Euklidischien Geometrie. III.
III.
Schraubenflichen als Extreme.
In der folgenden Mittheilung sollen in aller Kiurze einige Siatze fiber Schraubenflachen abgeleitet werden, die eine einfache Anwendung der in der vorhergehenden Abhandlung II entwickelten Theorie darsteilen. Eluer dieser Satze besagt, dass man der iublichen Abbildung der Geraden des Plicker'schen Liniencontinuums auf die Punkte einer quadratischen Mannigfaltigkeit eine Beziehung zur Nicht-Euklidischen Geometrie geben kann;
Das Continuum der reellen Geraden im elliptischen (oder sphdrischen) ]?aume lasst sich auf eine reelle quc(drutische Iannigfaltigkeit, die im elliptischen Raume von fiwnf Dimensionen verhiiift, derart abbilden, dass den Schraubenflachen die geo- datischen Linien auf dieser Mannigfaltigkeit zugeordnet werden.
Eine solche Abbildung erhalten wir auf eine sehr einfache Weise. Wir deuten erstens die homogenen Liniencoordinaten X1. . . X6 als homogene Punkt- coordinaten in Rautne R5. Aus den Bewegungen im dreidimensionalen ellipti- schen Raurne geht dann eine projective Gruppe G6 im Raume R5 hervor. Die Gleichung der quadratischen Manniigfaltigkeit, die wir mit MH bezeichnen wollen, wird:
X2+ X2 + s _ X2 + 42 + X2 )
Zweitens wahlen wir unter den quadratischen Mannigfaltigkeiten des Raumes R5, die elliptische Maassbestimmungen definiren (und also keine reellen Punkte haben), irgend eine aus, die bei der Gruppe G6 in Ruhe bleibt. Alle diese lassen sich leicht bestimmen. Sie haben Gleichungen der Form
C1 (Xi, + X3 + X2) + cr(X + + X+ X) = 0, (2)
worin die Constanten c, und cr von Null verschiedene positive VerWiltnissgr6ssen sind.
Benutzen wir also jetzt die Mannigfaltigkeit (2) als absolutes Gebilde einer Maassbestimmung vom Krfimmungsmaasse Eins, und bedienen wir uns der in der vorausgehenden Abhandlung II eingefiuhrten Bezeichnungen, so erhalten wir fiur die geradlinig gemessene Entfernung [Y, Z] zweier auf M41 gelegener Punkte YJ Z die Gleichung
(CI + cr) sin2' i Y, Z] = el. sin2 I (Y Z)?,. (3)
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Schraubenflachen als Extreme. 161
Fur entsprechende Bogenelemente dS und dsl, ds,r ergiebt sich heraus
(cZ + Cr)dSI2= ctdsl 4- crd8d. (4)
Lassen wir also die beiden Punkte X1 und Xr auf den zugeh6rigen Bild- kugeln mit constanten Geschwindigkeiten 26' und 29', deren mindestens eine nicht verschwindet, in geodatischen Linien (also auf grdssten Kreisen) sich bewegen, so bewegt sich der Punkt X auf MI ebensfalls in einer geodiatischen Linie mit constanter Geschwindigkeit 26', die man aus der Gleichung
(c1 + c) . 63/ = e.2 + E) . r (5)
erhailt. Zugleich ergiebt sich die Lange Y, Zt irgend eines geodiitischen Bogens zwischen zwei Punkten Y, Z von M4
(c+ c) *{I Z2=cL.(Y Z)2 + Cr (Y Z)2 (6)
Andrerseits durchlauft, im gew6hnlichen elliptischen Raume R3, der Speer X eine Schraubenfluiche mit constanter Drehungsgeschwindigkeit 2 1' und Gleitungsgeschwindigkeit 2?':
25W1 = 01 + 6)1 2n =t -E), + OrI (7)
Hierinit ist unsere Behauptung erwiesen. Es ist leicht, den Verlauf der geodatischen Linien auf MI zu ulbersehen,
und sich ulberhaupt die Einzelheiten der benutzten Abbildung deutlich zu machen.
Die Bilder der reellen parataktischen Congruenzen sind zwei Sceaaren von je o2 Kugeln. Alle Kugeln derselben Schaar sind zu einander congoruent (und im Falle C1 - Cr auch die versehiedener Schaaren). Zwei versehiedene Kugeln derselben Schaar schneiden einander nicht, zwei Kugeln verschiedener Schaaren aber schneiden sichi immer, und zwar unter constantem (im Falle cl - c, unter rechtem) Winkel in zwei Puinkten, die Bilder der Geraden eines Linienkreuzes sind, und auf beiden Kugeln einander diametral gegeniuber liegen. Durch jeden Punkt von M' gehen zwei solche Kugeln mit Durchmessern, deren Lingen ein- ander zu r: ergainzen.
Wenn nun zwei Punkte Y, Z uticht auf einer solchen Kugel liegen, so haben sie in Bezug auf die sie verbindenden geodaitischen Linien allgemeines Verhalten. Das heisst, es giebt zwischen ihnen keine Continua von gleichlangen geodatischen Wegen. IJsbesondere tritt das auch ein fur die 0?7 Punktepaare, die geodatisch durch gerade Linien verbunden werden k6nnen.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

162 STUDY: Beitrage zur Nicht-Eukldischen Geometrie. III.
Solche Punkte Y, Z dagegen, die durch eine der genannten Kugeln ver- bunden sind, und also auf dieser einander nicht diametral gegenuiberliegen, verhalten sich, wie wir etwa sagen konnen, im ersten Grade singular in Bezug auf die geodatischen Linierl. Es giebt zwischen ihnen eine isolirte geodiatische Linie, die ein grosster Kreis auf der zugehdrigen Kugel ist. Auf ihr liegt der absolut-kiirzeste Weg zwischen Y und Z. Ausserdem aber giebt es noch unend- lich viele Continua von je ol gleichlangen geodatischen Wegen zwischen je zwei solchen Punkten. Punktepaare der Art sind x I vorhanden. Im zweiten Grade sitgular verhialten sich dann die Ci4 gepaarten Punkte. Solche Punkte Y, Z werden erstens durch zwei Schaaren von je o 1 geodiatischen Wegen verbunden, die auf je einer der zwei Kugeln verlaufen, und die constanten Liangen
\' Ci+ Cr 4C + Cr
lhaben. Unter diesen Wegen befinden sich die absolut kuirzesten Wege zwischen Y, Z. Ausserdem aber giebt es noch unendlich viele Schaaren von je co2 gleich- langen geodiatischen Wegen zwischen Y und Z.
Das angewendete Verfahren liefert noch mehrere iahnliche Saitze. Ja, es liefert deren unbegrenzt viele, und es wird keine sonderliche Schwierigkeit haben, sie alle zu ermitteln. Wir wollen uns jedoch mit einigen charakter- istischen Beispielen begnagen, um diese Art von Ueberlegungen nicht uiber Gebiuhr auszudehnen.
WTir betrachten jetzt als Raumelement den reellen Speer. Wir gelangen dann sofort zu einer Bildmannigfaltigkeit vierter Ordnung, M41, die in einem projectiven Punktcontinuum von sechs Dimensionen verliiuft:
X X12 + X2 +.X = X2 + X42 + X2(8 0 26 (8)
Man sieht, dass M4 auf M2 zwei-eindeutig bezogen ist, was weiterhin die Folge haben wird, dass die Punktepaare Y, Z auf M4, denen in Bezug auf die noch zu erkliarenden geodiitischen Linien eine Sonderstellung zukommt, ein verwickelteres Verhalten darbieten als in dem eben betrachteten Falle.
Auch M4 gestattet nun, wie M4, eine zu den elliptischen Bewegungen isomorphe continuirliche Collineationsgruppe; und ilberdies erweist sich diese
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Schraubenfidchen als Extreme. 163
Gruppe auch - abweichend von dem Falle der MI - als durch die Mannig- faltigkeit MI selbst schon bestimmt.
Invariante quadratische Mannigfaltigkeiten, die zu elliptischen Maassbe- stimmungen fiuhren, sind jetzt diese:
el XI + el ( O2 + XI3 + X2) + C/ (X2 + =r4 + Xg) = 0 (9)
wofern c6 > 0, c' > O, c' > 0.
An Stelle der Gleichung (3) tritt jetzt die Gleichung
(co + c{ + c') sin2 1 [Y Z] = c'. sin2 Y (Y ) + cr . sin2'( Y; Z)r, (10)
und hieraus ergeben sich ahnliche Folgerungen wie zuvor. Aber die geodatischen Linien auf M4 sind hier Bilder von Schraubenflichen, die als Oerter von Speeren aufgefasst werden (S. 140). Auf eine Erorterung der verschiedenartigen Punkte- paare Y, Z auf M, darf wohl verzichtet werden. Doch wollen wir bemerkern, dass als Bilder der syntaktischen Congruenzen nunmehr 2. Goo2 Kugeln erscheinen, von denen zwei versehiedenartige einander in einem Punkte schneiden.
Leicht sieht man, dass man in diesem Falle statt einer elliptischen auch eine gew6hnliche Euklidiseihe Maassbestimmung benutzen kann. Man deute zum Beispiel die Grossen
e l X I - r X2
Ct + CrX el + Cr/ 0
u. s. w. als rechtwinkliche Cartesische Coordinaten. Man komnit dann wieder zu den Gleichungen (4) . .. (7). Aber die Bedeutung dieser Gleichungen ist nun eine andere, da ein Zeichenwechsel der sammtlichen Coordinaten einen von dein Punkte X versehiedenen Punkt der Mannigfaltigkeit M44 liefert. Durch Pro- jection aus dem Anfangspunkt der Coordinaten kommt man zu dem zuerst behandelten Beispiel zuriiek.*)
TVir betrachten jetzt al8 Raumelement den reellen Pfeil. Aus Pfeilcoordinaten erster Art bilden wir die folgenden Producte:
910 grO t ;9l0 K21 t I ;0 ;4) gtO K 6t
91 grO t 91 K21 t l t1;4y n 1 6 t
;(3 trOn 13 K2 ;3 t43 L 3 L i
K5 DrO 5 K2 y K54 D, 56
*) Vergleiche die Anmerkung auf Seite 121.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

164 STUDY: Beitrige zur Nicht-Etuklidischen Geometrie. III.
Diese deuten wir als homogene Punktcoordinaten 5K,, (i = 0, 1, 3, 5, x -0, 2, 4, 6) in einem projectiven Continuum R1l von 15 Dimensionen. Dann erhalten wir eine Bildmannigfaltigkeit der Pfeile, deren Ordnung mit Hulfe einer im vorliegenden Falle einwandsfreien Continuitatsbetrachtung = 24 gefunden wird. Diese Mannigfaltigkeit MX4 gestattet und bestimmt eine (sogenannte balb-einfache) reelle continuirliche zwolf-gliedrige Collineations- gruppe*), das Bild der eigentlichen cyclischen Transforinationen der Pfeile. Die Bewegungen im elliptischen Raume aber bestimmen eine sechsgliedrige Unter- gruppe dieser Gruppe, und eine Schaar von soo invarianten quadratischen Mannigfaltigkeiten ohne reelle Punkte,
yoS o + )/ (a 0+ ?qo + ~) +
+ 2 2+4+ )+2/Ir 4C=O ( 1) i, K
0Y,1 YI, Yr Y )Ir > ?, y 1 )3) 5, xC 2, 4, 6.
Wahlt man irgend eine von diesen als absolutes Gebilde einer elliptischen Maassbestimmung, vom Kriimmungsmaasse Eins, so ergiebt sich fuhr die (geradlinig gemessene) Entfernung zweier Punkte 1, Z auf MH4 der Ausdruck:
(7O + 2/I + 2/r + 2lr) COS [H1 Z] =(12) =/O +/YI COS (Y; Z)I + /r COS (Y Z)r +i Yr COS (Y, Z)I COS (Y, Z)r (
Hieraus folgt fur entsprechende Bogenelemente:
(YO + YI + Yr + I)dr) d I + r 2r) dSr . (13)
Man sieht, es ergeben sich wieder iilnliche Folgerungen wie zuvor. An- gemerkt zu werden verdient jedoch:
Die beident Mannigfalttigkeiten M' un,dH MH4 sind zwar beide frei von Singulari- taten, und sie sind birational, und iberdies im reellen Gebiete vollkommen eindeutig und stetig, ausserdem auch geodatisch, auf einander abgebildet. In complexen Gebiete jedoch ist diese Abbildung mit sin gularen Stellen behaftet.
Die Einzelheiten ergeben sich aus dem Verhailtniss der Begriffe Speer und Pfeil. (S. 157).
Schliesslich kann mnan die Schraubenflachen auch als Oerter von Linienkreuzen ansehen (S. 140). Deutet man dann die Producte gi K i = 1, 3, 5, x= 2, 4, 6
als homogene Punktcoordinaten Sj, so kommt man zu einer Punktmannig-
*) Im complexen Gebiete gestattet (und bestimmt) 144 vierundzwanzig continuirliche Schaaren von
je CD24 Collineationen, von denen acht Schaaren reelle Transformationen enthalten. (Vgl. S. 143.)
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

SchraubenflJchen als Extreme. 165
faltigkeit MI, von der sechsten Ordnung, die von zwei Schaaren von je Oo2
Ebenen beschrieben werden kann -den Bildern der beiden Schlaaren para- taktischer Congruenzen, die man aus Linienkreuzen bilden kann. Diese Mannig- faltigkeit gestattet unid bestimmt eine (halb-einfache) continuirliche Collineations- gruppe mit sechzehn Parametern; und in dieser liegt wieder eine zur Gruppe der Bewegungen im elliptischen Raume isomorphe Untergruppe. Die einzige invariante quadratische Mannigfaltigkeit ist jetzt
2~ =tKq ?, = (14)
und diese fiihrt zu den Gleichungen
Cos [1, Z] = cOs ( co s)i COS (i) A)r (15) und
dS2 = ds2 + ds8. (16)
Das Weitere ergiebt sich von selbst.
Als Ausdruck fiur die geodatische Entfernung zweier Punkte Y, Z auf irgend einer der betrachteten Bildmannigfaltigkeiten hat sich stets eine Grosse der Form
*t Zt -,%/Pl e ( Y, Z)'l + tir *(Y) )r (17) ergeben, wo yl > 0, > 0. Wir wollen nun die einfachste Annahme y =r=1
machen, was entweder schon von vorn herein zutrifft, oder (in allen Faillen) da- durch bewirkt werden kann, dass man c= cl , cr I cf r 1 ly = )//r setzt, und das Kriimmungsmaass oder die Langeneinheit des benutzten hoheren Raumes auf geeignete Weise abandert. Unter dieser Voraussetzung wollen wir die mehr- deutige Grosse { Y, Zt schlechtweg geodatische Entfernung der reellen Speere oder Pfeile*) Y, Z nenneil.
Betrachten wir anderseits irgend eine die Speere oder Pfeile Y, Zverbindende Schraubenfluche. X sei eine Axe dieser Fliache, so dass Y durch gleichformige Schraubung um Xschliesslich in Ziubergeht. Irgend ein Punkt von Ybeschreibt dann eine orthogonale Trajectorie der Erzeugenden der Schraubenflache, eine Schraubenlinie (zugleich asymptotische Linie der Schraubenfluicbe), die zwischen Y und Z eine bestimmte Bogenlinge hat. Unter diesen Schraubenlinien giebt es zwei ausgezeichnete von gleicher Bogenlhnge, die namlich, deren erzeugende Punkte von X und von der Polare von X den Abstand _ T mod. r haben, also,
*) Oder nach Umstdnden, der Geraden oder der Linienkreuze Y, Z.
22
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

166 STUDY: Beitrdge zu4r Nicht-Euiklidischen Geometrie. III.
wie man sagen kann, von beiden Geraden gleichweit abstehen. Diese Sebrauben- linien wollen wir etwa die mittleren Schraubenlinien zwischen Y, Z nennen.
Es gilt nun der einfache Satz: Die geoddtische Entfernung zweier reeller Speere Y, Z ist bestimmt, nach-
dem man diese durch eine Schraubenfiiche verbunden, und nwthigenfalls ilber den Weg, auf dem Yin Z ilbergefilhrt werden soll, entsclhieden hdt.*) Sie wird dann gleich dem Doppelten der entsprechenden gemeinsamen Lange der beiden mittleren Schraubenlinien zwischen beiden Speeren.
In der That, schreitet bei der gleichf6rmigen Schraubenbewegung, die Y schliesslich in Z iiberfuihrt, der Schnittpunkt x von Y und X um die Lange 2dr fort, und der Schnittpunkt x' von Y mit der Polare von X um die Lange 2d, C, so schreitet, wie eine leichte Rechnung zeigt, irgend ein Punkt auf Y mit der Gleichung
V(Xx) + V/(x'x')
urn eine infinitesimale Strecke fort, deren Langenquadrat gleich ist dem Ausdruck
4F . dn2 + v. d (19) g + v
Ist y- = v, so durchlauft der genannte Punkt eine der beiden mittleren Schraubenlinien, und der letzte Ausdruck reducirt sich auf
W 14 (Y, y+ dY) + (IY Y+ dY)Tj. (20)
Natiirlich kann man auch das Vorzeichen von J Y, Z von dem Sinne abhiangig machen, in dem die Schraubenflache durchlaufen wird.
In der hyperbolischen und in der Euklidischen Geometrie kann man zum Theil entsprechende Entwickeluing,en vornehmen. Die Schraubenflachen er- scheinen auch hier als Losungen eines Problems der Variationsrechnung, das sich aus der Bildung gewisser quadratischer Differentialformen ergiebt. Sie haben indessen in diesen Fallen nicht die Eigenschaft, Extreme zu sein. Auch im elliptischen Raume selbst treten solche Erscheinungen schon auf, wenn man die von uns mit c,, C. u. s. w. bezeichneten Constanten verschwinden und in negative Werthe uibergehen lasst.
*) Wenn die Schraubenfliiche algebraisch ist, so sind verschiedene Wege moglich.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions

Schraubenjlichen als Extreme. 167
Dagegen konnen sich unsere Ueberlegungen vielleicht in anderer Beziehung als niutzlich erweisen. Die geodatische Entfernung
1 Y, Z}- 7( Z), + ( r Z)2 (21)
zweier Speere z. B. wird eine iahnliche Behandlung zulassen, wie der gewohn- liche Entfernungsbegriff. Die Geometrie der Speere liefert so ein Beispiel zu der auf Differentialformen gegriundeten Mannigfaltigkeitslehre, und zwar zur Theorie der Mannigfaltigkeiten von nicht-constantem Riemann'schern Kriim- mungsmaass. Die Probleme der gewohnlichen Flachentheorie konnen auf diesen Fall ibertragen werden und liefern dann neue Gesichtspunkte fur die Behandlung der Liniencongruenzen und anderer Figuren.
Schliesslich verdient es wohl noch bemerkt zu werden, dass die zu Aus- driucken der Form (17) gehlrige Maassgeometrie auch in einem anderen Ge- dankenkreise auftritt.
Der Verfasser hat mit Huilfe der Theorie der Hermite'schen Formen aus der gewohnlichen elliptischen und hyperbolischen Geometrie allgemeinere Arten der Maassgeometrie abgeleitet. (Verhandlungen des Heidelberger Mathematiker- Congresses, Leipzig, 1905, S. 312-321 und Math. Ann. Bd. 60, 1905, S. 321). In iihnlicher Weise und zufolge dieser Theorie Iisst sich auch die spharische Geometrie erweitern. Die Geometrie auf einer Kugelflache insbesondere fuihrt dann zu einer Maassgeometrie in einer vierdimensionalenl Mannigfaltigkeit, die ihrem logischen Inhalte nach nicht verschieden ist von der hier besprochenen Maassgeometrie im Continuum der reellen Speere oder Pfeile.
In der auf Seite 159 erwahnten Geometrie der Somen im elliptischen oder sphiarishen Raume giebt es ebenfalls Satze, die den vorgetragenen ahnlich sind.
BONN, im Mdrz 1906.
This content downloaded from 91.229.248.208 on Thu, 15 May 2014 00:20:45 AMAll use subject to JSTOR Terms and Conditions