Embed Size (px)
Citation preview

Svensk Idrot ts forskning nr 1 * 1998
• t e *
Biomekanik för att studera och förstå teknik Det år b ra a t t k u n n a b i o m e k a n i k nå r m a n d isku te ra r e l ler s tudera r rö re l se tekn ik . Den g e r redskap
både f ö r analys och fö rs tåe lse . Hur m y c k e t behöve r m a n då k u n n a ? Ju m e r des to b ä t t r e ! Här ges en
k o r t f a t t a d i nb l i ck i d e v i k t i gas te g r u n d e r n a .
• • • Inom idrotten gör man kontinu-erligt bedömningar av teknik, som tränare ger man teknikinstriiköoner, som aköv funderar man på rörelseutförandet och som åskådare har man allöd synpunkter på hur de aköva bär sig åt - allt för att göra prestaöonen bättre. Förbättringen kan röra sig om en ökad maximal prestaöon eller en mer opömal dito i förhållande öl l en estetisk mal l , en minimering av energiåtgången eller ett undvikande av skaderisker. Biomekanik används av de flesta i dessa sammanhang mer eller mindre intuiövt. Ju mer man kan om biomekanik desto bättre är förAitsättningarna för att veta vad man gör, kunna systematisera sina observaöoner och ta ö l l sig vad andra har kommit fram ÖLL
Syftet med den här Irairiställningen är att ge en kortfattad beskrivning av basala biomekaniska principer som en inkörsport ö l l fortsatt förkovran. Tanken är att ge grunderna för rörelsebeskrivning, vi lken oftast är utgångspunkt för analys, samt en
A l f Thors tens-
Idrottshögskolan och Karolinska institutet
in t roduköon ö l l bakomliggande mekaniska faktorer. Många känner förhoppningsvis igen mycket från skolfysiken. Exemplen tjänar som frön som sås för att växa öl l appliceringar inom andra idrotter som ligger läsaren närmare. Art ikeln är ett koncentrat av kompendiet Biome-kanik - bas för idrotts- och arbetsteknik (Thorstensson 1992). Ett koncentrat av koncentratet önns i ett nötskal nedan.Ytterligare litteratur med liknande budskap återfinns i referenslistan i slutet av arö-
MEKANIK I ETT NÖTSKAL
Två ol ika typer av rörelse
Människans rörelser är oftast komplexa och ett resultat av samödiga rörelser i flera olika leder. Detta gäller i högsta grad idrottsrörelser. Oavsett om man v i l l beskriva hur hela kroppen rör sig eller väljer en rörelse kr ing en viss led bör man erinra sig vissa grundsatser om hur rörelsebeskrivningen skall gå ö l l , dvs regler för kinemaök.
En bra utgångspunkt är insikten om att v i har två huvudtyper av rörelse, translatorisk (linjär rörelse) och rota-torisk (vinkelrörelse). Den förra karaktäriseras av att alla punkter på en kropp rör sig l ika lång sträcka på samma öd längs en linjär (eller kur-volinjär) bana, den senare av att rörelsen sker kr ing en rörelseaxel, dvs ju längre ut från axeln en punkt ligger desto längre sträcka förflyttas den per ödsenheL Väljer man en punkts kinemaök, t.ex. tyngdpunkten i kroppen eller i ett föremål, bl ir rörelsen a l löd translatorisk. Våra
# En kropp kan vara i ett tillstånd av vila eller av rörelse i en viss riktning. Rörelsen kan antingen vara translatorisk (linjär rörelse) eller rotatorisk (vinkelrörelse) eller en kombination av de två.
# En kropp med konstant rörelsehastighet år ur mekanisk synvinkel analog med en kropp i vila.
# I en accelererad rörelse ändras hastigheten, antingen sker en ökning (positiv acceleration) eller en minskning (negativ acceleration) i en viss riktning.
# Den del av mekaniken, som behandlar beskrivning av kroppars rörelse kallas kinematik.
# För att ändra en kropps tillstånd av vila eller rörelse med konstant hastighet i en viss riktning kravs en kraft (linjär rörelse) eller ett kraftmoment (vinkelrörelse).
# Studiet av hur andringar I kroppars rörelsetillstånd uppkommer kallas kinetik.
* Oftast verkar fler ån en kraft (ett kraftmoment) samtidigt på en kropp. Om dessa tar ut varandra får vi mekanisk jämvikt, dvs ingen ändring i rörelsetillstånd.
# Mekaniska principers tillämpning på kroppar i jämvikt benämns statik. Dynamiken behandlar kroppar i rörelse. (Observera att begreppen överlappar varandra vad galler rörelse med konstant hastighet, där statik kan applice-
# Storleken av den ändring i rörelsetillstånd, som åstadkoms av en viss kraft (kraftmoment) bestäms av faktorer som kroppens tröghet (massa vid linjär rörelse, tröghetsmoment vid vinkelrörelse), den t id som kraften (kraftmomentet) verkar samt under hur lång sträcka kraftpåver-kan äger rum.
* Vid rörelse (eller försök ti l l rörelse) mellan två ytor eller genom medier av olika densitet (luft, vatten), måste hänsyn tas til l fenomen som friktion och aero- (hydro-) dynamik.

Svensk Idrot tsforskning nr 1 * 1998
vanliga rörelser är i regel sammansatta av både translatoriska och rota-toriska rörelser. Ta exempelvis ett vertikalhopp, där tyngdpunkten kommer att ha en translatorisk rörelse medan rörelserna mellan segmenten i engagerade leder huvudsakligen är rotatoriska, åtminstone i satstagningen. Cykling är ett annat bra exempel. I samtliga fall är det fördelaktigt att analysera och beskriva de två typerna av rörelse var för sig.
Sätt att beskriva en rörelse
Man kan karaktärisera en rörelse på tre olika sätt, via dess förflyttning, hasöghet eller acceleraöon Alla tre står i "matematisk förbindelse" med varandra, dvs vet man en kan man räkna fram de två andra. De tre beskrivningssätten gäller för både translaöons- och rotaöonsrörelser, men med olika symboler och enheter (Tabell 1). Vid en föröyttning över en viss sträcka (vinkel) blir hasögheten lika med förflyttningen per ödsenhet och acceleraöonen lika med hasöghetsändringen per tidsenhet. Denna hasöghetsändring, acceleraöon, kan anöngen innebära att hasögheten ökar (vanligen benämnd bara acceleraöon) eller minskar (deceleraöon, retardaöon eller bromsning). Vet v i storleken på förflyttningen över ett visst ödsin-tervall kan v i således beräkna hasögheten och vet v i hasöghetema i två ödsintervall kan v i beräkna den eventuella acceleraöonen dememel-lan. Har v i ingen föröyttning får vi naturligtvis vare sig hasöghet eller acceleraöon Om hasögheten är konstant har vi definiöonsmässigt ingen hasöghetsändring och därmed heller ingen acceleraöon. Konstant acceleraöon förekommer framför allt i ett fall, nämligen fritt (om man bortser från luftmotståndet).
Grafisk illustration
Att veta hur kinemaök ter sig i dia-gramform är bra, dels för att kunna åskådliggöra sina egna rörelsedata, dels för att kunna tolka andras resultat, som ofta redovisas grafiskt. Våra tre kinemaöska variabler, förflyttning, hastighet och acceleraöon, registreras och redovisas i regel över tid, vilket resulterar i tre typer av diagram: förflyttning (posiöon) mot öd, hasöghet mot öd och acceleraöon mot öd. Andra typer av "plotter" förekommer också, t.ex. vinkelvinkel-plotter, där vinkelf örilyttning
i en vinkeL Lex. i knäleden, avsätts på x-axeln och motsvarande förändringar i en annan vinkel, t.ex. i höftleden, avsätts på y-axeln. Dessa diagram är relaövt ovanliga, men kan vara värda att pröva för att åskådliggöra skillnader i rörelsemönster. Att avsätta linjär föröyttning i två eller t.ojn. tre olika riktningar förekommer också, det förra är vanligt vid beskrivning av tryckpunktens (eng.: centre of pressure's) rörelser i förhållande öll understödsarean vid balansstudier.
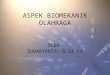
Vanligast är i alla fall att ha öd som oberoende variabel på x-axeln. I Figur 1 ges ett typexempel på hur sådan kurvor kan se ut vid en normal rörelse kring en led. Notera att rörelsen i exemplet är en vinkelrörelse, men att ett helt analogt resonemang kan tillämpas vid linjär rörelse. Vad kan man då uöäsa i respeköve diagram? Först ett par grundregler Lutningen på kurvan i ett för-öyttnings-ödsdiagram är lika med hasögheten och lutningen på kurvan i ett hasöghets-ödsdiagram är lika med acceleraöonen. Detta innebär att om man kan bestämma lutningen på respeköve kurva så är mycket vunnet. Matematiskt gör man detta genom s.k. derivering. Genom den omvända processen, integrering, bestämmer man arean under respeköve kurva och kan på så sätt gå från acceleraöon öll hasöghet och från hasöghet öl l föröyttning.
I typexemplet i Figur 1 ser vi att kurvan i förjlyttnings-ödsdiagranxmet inte är en rät linje med samma lutning (=konstant hasöghet) utan att dess lutning varierar. Av detta kan vi direkt sluta oss ti l l att hasögheten inte är konstant, utan att vi har acceleraöon. För att kunna få fram hasögheten måste v i bestämma lutningen på kurvan (tangenten) i varje punkL Vi ser att kurvan blir branta-
re, lutningen ökar, från starten, A, fram ti l l punkten C där lutningen är som störst - vid denna ödpunkt skall alltså hasöghets-ödskurvan ha ett maximum. Mellan pxmktema C och E avtar sedan lutningen=hasög-heten, men den är fortfarande positiv (>0), dvs hasögheten (rörelsen) är riktad åt samma håll. Hasöghets-ödskurvan får härmed ett typiskt s.k. klockformat (eng.: bell-shaped) utseende, vilket är det vanliga vid en spontan viljemässig rörelse. Gör vi samma kontinuerliga bedömning av hasöghetskurvans lutning finner vi att vi får en acceleraöonskurva med två toppar, en posiöv och en negaöv. Ungefär halvvägs i rörelsen, i den punkt där hasögheten är som högst (C), är acceleraöonen lika med noll, dvs acceleraöonskurvan ändrar tecken - rörelsen övergår från att vara (posiövt) accelererad öl l att bli bromsad. Alla värden på kurvan som ligger över noll-nivån innebär då att hasögheten ökar i färdriktningen, alla som ligger under och är negaöva visar en hastighetsminskning i samma riktning. Hasög-hetsökningen är störst i punkten B och hasöghetsminskningen i punkten D. Observe-ra att man inte kan säga något om riktningen på själva rörelsen enbart från acceleraöonskurvan. Posiöv acceleraöon i en riktning motsvarar bromsning i motsatt riktning och vice versa. Acceleraöonskurvan skall vi återkomma öll senare eftersom den bildar en direkt brygga till kineöken
Beräkning via kinematik
Nu skall v i utnyttja de samband vi hitölls berört mellan förflyttning, hasöghet och acceleraöon, för att reflektera över och beräkna hopp-höjd. Med hopphöjd menas här den vertikala höjningen av kroppens tyngdpunkt från det att man lämnar underlaget. Det är vikögt att komma
Förflyttning
Hastighet
Acceleration
Translation
s,
v, v=As/At
a, a=Av/At
(m)
(m/s)
(m/sZ)
Rotat ion
9.
(0, (a=A6/At
a, a=Am/At
(°, rad)
(o/s, rad/s)
(°/sZ, rad/sZ)
Tabeff I. Ndgnz t%r%zWer,/brWer och enfigkr/or kznemafik. "raj." = indianer, säf f aff hwifi/icra /or/Zi/f fnfng rid DinJ%frörefse; 1 rWirni mofsnmzr uinicefn när s=r, dw när sfröcfazn föngs czrkfns penyéri or fiÄzz med föngden pd cirkelns radie. 1 nzd.= 57.3 °. 4 symboliserar en/bröndring.

Svensk Idrot ts forskning nr 1 • 1998
•Jffe'
ihåg att därefter är tyngdpunktens bana bestämd och kan inte påverkas. Vad man kan göra i luften är att arrangera sina kroppsdelar på olika sätt och därigenom "öytta" tyngdpunkten i eller utanför kroppen. Det blir exempelvis ett självklart mål för tekniken i höjd- och stavhopp att ha tyngdpunkten så lågt som möjligt vid ribbpassagen. Detta kan få öl l följd att tyngdpunktens bana, som ju är bestämd sedan upphoppet och förhoppningsvis hög, faktiskt kan passera xmder ribban medan de olika kroppsdelarna successivt passerar över densamma!
Den vertikala föröyttningen av tyngdpunkten v id alla hopp och kast bestäms av den vertikala ut-gångshasögheten hos kroppen eller föremålet (vi bortser här från eventuell aerodynamisk påverkan). Den vertikala föröyttningen blir i sin tur avgörande för hur lång öden blir i luften. Hur långt man kommer i ett hopp eller kast avgörs av förhållandet mellan den vertikala och den horisontella hasögheten i uthop-pet/-kastet. Denna avvägning blir givetvis ett intressant teknikproblem att lösa i varje individuellt fall.
Nu öl l räkneexempleL Låt säga att vi gör ett test på vertikal hoppförmåga och registrerar öden i luften öl l 0.6 s. Kroppsposiöonen är densamma vid upphopp som nedslag. Hur stor är hopphöjden? För att lösa detta utnyttjar v i det faktum att det från högsta punkten i hoppet är fritt fall och att öden för upp- är lika med öden för nedfärden, dvs vardera utgör halva öden i luften. Vi vet att acceleraöonen vid fritt fall är lika med tyngdacceleraöonen, a = g = 9.81 m/s^ (vi räknar, för enkelhetens skull, med 10 nx/s%), vilket också är lika med deceleraöonen på väg upp. Medelhasögheten (v^) vid en jämnt accelererad rörelse är lika med halva sluthasögheten (vf), dvs förflyttningen s = Vm t = Vf/2 t. a = Av/At (Tabell 1), dvs sluthasögheten vid acceleraöonen v^ = a t; då får v i s = a t /2 t = a t^/2. Sätter v i in våra siffervärden ger det: s = 10 - 0.3^/2 = 0.45. Alltså är hopphöjden lika med 45 cm. Vil l vi veta den vertikala uthoppshasögheten (= nedslagshas-ögheten), utnyttjar v i åter att a = Av/At, dvs Vf = 10 - 0.3 = 3. Den sökta hasögheten är 3 m/s. Antag att hoppet också hade en viss horisontell utgångshasöghet, Lex. 6 m/s.
0
A B C D
Figur I. Diagram öoer sambanden meffan pin&efposifion (B) - fid (f), mn&ef/zasfig-/ief (w) - fid oc/% oin&e/acceferafion (cd - fid ivid en normaf roreke i en /ed, f.ez./7e%-ion i armWgs/eden.
Hur lång bli då hopplängden (s^)? (Här måste v i behålla förutsättningen att tyngdpunkten befinner sig på samma höjd vid uthopp och nedslag. Självklart går det att utnyttja samma samband för beräkningar xmder mer realistiska förhållanden, men det blir Ute krångligare.) Då s = Vm -t får vi Sff = 6 0.6 = 3.6, dvs hopplängden är 3.6 m. Vill vi veta
uthoppsvinkeln kan vi utnyttja tri-gonometri (tångens 8 = 3/6 = 0.5; 8 = ca 27°, en inte orimlig vinkel i längdhopp). Trigonometri, eller Pytha-goras' sats, ger också hasögheten i uthoppsriktningen (ca 6.7 m/s). Man kan givetvis även exercera sina kinematiska samband mellan föröyttning, hasöghet och acceleraöon med utgångspunkt från kännedom

Svensk Idrottsforskning nr 1 « 1998 • ' t e '
om utkastZ-hoppvinkeln och hasögheten i uthopps/-kastriktningen.
Kraftöverskott - acceleration
Utgångspunkten for kineöskt anfall är Newtons lagar för mekaniken (se Daggfeldt 1998). Kontentan av dessa är att det fordras en resulterande kraft för att ändra en kropps rörelse-öllstånd, dvs att om det inte önns ett "överskott" av kraft åt något håll fortsätter en kropp att befinna sig i vila eller i rörelse med konstant hastighet i en viss riktning. En resulterande kraft i en bestämd riktning ger alltså upphov öl l en ändrad hasöghet (=acceleraöon) i samma riktning. Observera att ett kraftöverskott i en viss riktning kan ge upphov t i l l såväl en posiöv acceleration i samma riktning som en inbromsning i motsatt riktning. Samma känsla av hoptryckthet drabbar en i en snabbt accelererande hiss, såväl vid starten uppåt som vid inbromsningen nedåt, båda ändringarna i rörelsetillstånd kräver en resulterande kraft i riktning uppåL På motsvarande sätt avlastas underlaget i slutet av en uppåtresning och i början av en nedsjunkning. Ar underlaget snö passar det bra att "vrida om" skidorna just då eftersom trycket mot snön och därmed friköonen är mindre.
Sambandet kraft - acceleraöon gäller i lika hög grad omvänL Kan man identifiera en ändring i rörelseöll-stånd, dvs förekomsten av en acceleraöon, i en viss riktning vet man också att det just då är ett kraftö-
Fy" i
oH
A
verskott i precis den riktningen. Notera att det av Newtons lagar följer att även en rikhxingsförändring är en ändring i rörelsetillstånd och därför definiöonsmässigt kräver ett riktat kraftöverskott.
Till yttermera visso möjliggör Newtons lagar en bestämning av storleken på den acceleraöon som en viss resulterande kraft ger en kropp, eller omvänt hur stor den resulterande kraft är som givit en given kropp en viss acceleraöon (s.k. inverse dynamics). När det galler linjär rörelse följer detta av sambandet F = m a (F = kraft, m = massa, a = acceleraöon). Enheten för kraft är, lämpligt nog, Newton (N, 1 N är den kraft som ger massan 1 kg en acceleraöon på 1 m/s*). Massan, m, benämns i detta sammanhang tröghet (eng.: ineröa) och utgör kroppens inneboende motstånd mot att ändra sitt rörelse-tillstand. Ju större tröghet en kropp har, desto större resulterande kraft krävs det för att accelerera, bromsa eller riktningsändra dess rörelse. Värden för massan på kroppen eller ett föremål får v i genom vägning, kroppsdelars massor i förhållande öl l hela kroppsmassan erhålls genom att konsultera tabeller i biomekaniska läroböcker (se referenslistan). Har v i inget kraftöverskott åt något håll, dvs alla verkande krafter tar ut varandra/ får v i ingen acceleraöon. I sådana situaöoner, då kroppen beönner sig i vila eller rör sig med konstant hasöghet i en viss riktning, råder jämvikt och vi kan tillämpa principerna för staök: Känner vi storleken på krafterna i en viss
B C
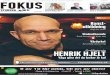
figur 2. Diagram som schematiskt visar variationen i /ntfionstra/f (F/d riktad /mmJt-boWf över fid (t) mdyötkonfakf i fre ofi&o gifuafioner; A./orsfa sfegef ^fer en sprinfsfarL B. iöpning med konstant fiasfighef, och C. uthoppet i eff fängdhopp. Röreken gker/rdn Dänsfer fiff höger. Frikfionskra/fen är en reakfionsAra/f, däryör bfir den rifcfad bakdt (bromsande) md/bfisäffningen och/ramdt i/r^Ins^iitet (acce-ferenmde). Notera gdrskiff de inbxWeg/örhdffandeno meffan de bromsande och acce-fererande impnfsema.
riktning, vet v i att de motsatt riktade krafterna är lika stora och således beräkningsbara.
Rotatorisk rörelseändring
För rotaöonsrörelse kan man tillämpa precis samma principer som ovan beskrivits för linjär rörelse. Eftersom det nu är fråga om rörelse kring en rörelseaxel, räcker det inte med att diskutera bara kraftspelet utan man måste också ta hänsyn öll hur krafterna verkar i förhållande öll rörelseaxeln Vidare är det inte tillräckligt att känna t i l l massan utan man måste också veta hur den är distribuerad kring rörelseaxeln.
Angriper en kraft med en riktning så att dess verkningslinje går rakt igenom rörelsesaxeln, påverkar den inte rotationen. Går den däremot vid sidan om rörelseaxeln uppstår ett kraftmoment (vridmoment, vridande moment, eng.: torque eller moment of force) som strävar att ändra kroppens mtaöonsrörelseöllstånd. Storleken på detta kraftmoment (M) är beroende dels av kraftens storlek (F), dels av längden på hävarmen (momentarmen, hävstångsarmen, eng.: the lever or moment arm), dvs det vinkelräta avståndet från kraftens verkningslinje öll rotaöonscentrmn (1). Detta skrivs formelmässigt M = F - 1 (enheten för kraftmoment blir Nm). Notervärt är att hävarmens längd har lika stor betydelse som kraftens storlek för hur stor verkan av kraftmomentet blir på rotaöonsrö-relsen Detta får konsekvenser bLa. vid diskussion om muskelstyrka, eftersom denna kommer öll uttryck och mäts som det resulterande kraft-momentet kring en led.
Kraftmoment (M) är således det analoga begreppet öll kraft (F) och vinke-lacceleraöon (a) motsvarar linjär acceleraöon (a). Hur är det då med trögheten vid vinkelrörelse? Motståndet mot att rotera är inte bara avhängigt av massans storlek utan också av var den är belägen i förhållande öll rotaöonsaxeln. Man inser intuiövt att en kropp med massan utspridd långt ut från rotaöonsaxeln är svårare att fås att rotera, dvs kräver ett större kraftmoment, än en kropp vars massa ligger nära rotaöonsaxeln En kropps inneboende motstånd mot att ändra sitt rörelsetillstånd vad gäller rotaöon kallas dess tröghetsmoment fj eller ibland I, eng.: moment of ineröa). Samban-det mellan kraftmo-

Svensk Idrottsforskning nr1D1998 ^ ^
mexit,tröghetsmomexitochvixikelac-celera t ionblmM^l o .
Tröghetsmomex^tets storlek avgör alltså hur stor vinkelacceleration ett visst kraftmomexitgerochomvänt, vet man vinkelaccelerationen i ett v i s s t ö g o n b l i c k o c h v i l l h a r e d a p å kraftmomentet xnåste man först ta redapåtröghetsmomentetsstorlek. riurgörmaxidet7 När det gäller värdena för olika kroppsdelar fåxman åter konsultera litteraturexi, där man antingen får tröghetsmoxnentens storlekdirekt (uppmät tapåandras likdelar) eller värden som gör att man kan beräkna dem kring en viss rotationsa^el.
Tiden bar betydelse
Är målet att öka dexilxxxjära accelera-t ionenså mycket som möjligt xett visst ögonblick skall strävan vara att ö k a d e n r e s u l t e r a n d e k r a f t e n i d e n öxiskade rikhxixigen och minska tröghetexi. Vid rotationsrörelse gäl ler att maximera det resulterande kraftmomentet (s torkraftoch helst också lång hävarm) och minimera txöghetsmomentet.Tröghetexi ^massan) är oftast xnerellermindre given, medan tröghetsmomentet kan mins kas genomat t massaplacerasnär-marerotatiox^sa^eln.
En annan viktig faktor i samman hanget är d e n t i d u n d e r v i l k e n d e n resulterande kraften får verka. Denna är avgöraxide för hxxr stor shxthastxghetenblirefterkraftxnsat-sen.Frxncxpenärattjuläx^gretidexx kraft får verka desto större blir äxid-ringenihastxghet. Något förenklat kanmanskr ivaF t ^ m v^,medti digare användasymboler. F^ t b e -xiäxmis linjär impuls ^engB linear impulse) och står för arean xmder kraft t idskurvan-ju större dexma är desto störreblir öknxngenxhastxg-het, allt axmat lika. Detta förbållande ger upphov till tekx^ikfunderingar i idrotter där det gäller att ge sig själv eller ett föremål så hög sluthastxghet sommöjligt.Dexi tidmax^kax^ påverka kroppexieller föremålet med exx resulterax^dekraft blir en faktor att ta hänsyn till och gärxia öka. ^Förhål-laxxdetb l i rdockiu tea l l t idsåenty-digt - muskelxnekaxnska faktorer kommer ixiochkoxnplicerarbildexx, jfrnedan.)2torleksföxhållandetmel laxx de broxnsande och accelererande ixnpulsema blir avgörande för om det exempelvis sker en bastig hetsäxidrmg eller inte vid en fotkon-
F i g 3 . ^ ^ m e ^ n ^ ^ a ^ o n . ^ r ^ ö ^ r s ^ ^ - a c c e ^ r ^ f ^ n
takt med underlaget ^Fxgur ^). Vid rotationsrörelse duger ovanstående resoxxemang lika bra, men med andra, analoga, variabler ochsym-boler^se ovan). Notera åter att trög-betsmomentets storlek går att variera och att det alltså är möjligt att påverkadenrotatxoxjshastxghetsom nås efter det att ett visst kraftmo mexxt verkat xxxxder en bestämd tid.
Omvändningerx av ovaxxstående samband är också tillämpbar ix^om rörelseaxialysexi, xxite xninst iuoxn xdrottex^Vi utgår då fråxi produkten av massa och hastighet,m v,kallad Ixxxjär rörelsemäxxgd ^p, exxgB linear xnomexitum). Efter ä t t en kropp via erx impuls givits en viss rörelsemängd måste denna rörelsexnäxxgd oftast ^tas omhax^d^ v i a e n n y och motrxktad impuls. Det kan gälla x^edslag efter hopp, mottagning av
redskap,bollar eller personer. Man kanteknikmässigt spela m e d d e två variabler somxxtgör xn^pxxlsen, näm-ligexi kraft och tid. Eftersom produkten av kraft och tid^arean xmder kxxr-van) är given, bestämd av rörel semängderx, kanxnan antingen öka tidexx och därmed minska kraftexx eller tväx^tom. Vill man reducera kraftpåkänxnx^gen och därmed kax^skexxixnskaskaderiskexi eller öka kontrollen, bör man söka förkmga tidexx för dexx xnotverkaxxde ixnpul-sexx. Dexxxxa princip ligger bakom koxxstruktxoxxen av skyddsutrust-xxxng, nedslagsbäddar ocb tekxxikexx vid mottagning av bollar och slag.
Trögbetsmoment^t påverkar
l^örelsemäxigdspx^xncipexj får exx axmax^ ixxtressaxxt tillämpxxmg vid rotationer under exihxftfäxdeller på

Svensk Idrot tsforskning n r 1 D 1 9 9 8 ^ ^
underlag xned liten friktiox^ (litet motstånd när ytor glider mot varandra), t.ex. is . Ioch med att man givit kroppen eller ett föremål ett visst rörelsexnäxxgdsmoment (I ^ xx, engBangularmomexitum)bibehålls detta konstantoxn inget yttre kraft-momexit tillkommer. Men gexiom att trögbetsmomentet kaxi varieras vil-jemässigt kan rotationsbastighetexx ändå påverkas. Minskas tröghets-momentet ökar rotationshastighetexi ochviceversa.l^elevaxisen för rotationstekniken i idrotter som gvm xiastik, simhopp och konståknixxg är uppenbar.
Att rörelsemängd helt eller delvis kan överföras mellan kroppar /kroppsdelar/föremål har också stor betydelse för tekniker i olika idrotter. Överföring av rörel-sexnäxxgdbliruppenbarisituationer som innebär krockar av olika slag ( t .excur l ingochbi l ja rdoch, föra l l del, idrotter med kroppskontakt), gumman av ingående kroppars rörelsemängder är härvid lika stor föreochefter ^stötB. Överföringav rörelsemängdsmomexitblirenreali-tetitekniker där kroppsdelars rörelser blockeras och rotationsrörelse i angränsande kroppssegment därmed sätts igång, såsom i många gymnastikövningar.
Verkningsgrad rörelseekonomi
Ett amiat sätt att analysera kinetiken i en rörelse är att ta fasta på den sträcka över vilken en viss kraft ver-kar.Genom att multiplicera kraften med förflyttningexi i kraftens riktning får mane t t mått p å d e t arbete (^) som utförts ( ^ ^ F s , e x ^ h e t N m eller joule). E n e r g i b l i r e t t m å t t p å förmågax^att utföraarbete och kan antingen bero på en kropps höjd (h) iförhållande till exi viss referexxsxxivå (lägesenergi eller potentiell energin m ^ g ^ h ) eller på dess rörelsehastighet (rörelse-ellerkinetiskex^ergi^m ^v^/^).uttrycker max x arbetet (eller exiergin)pertidsexihet får man effekt (F,exxgB power).Detta kanvara ett användbart mått i idrottssamman-hang.Tar vi åter exemplet vertikalhopp kanv i konstatera att ett hopp p å O . ^ m f ö r e n p e r s o n s o m v ä g e r BO kg motsvarar en tillförd ex^ergx på 315 loule (^lägesex^ergixi i högsta punkten) vilken i sin tur helt har omvandlats till rörelseenergiixxeds-laget. Nedslagshastigheten blir d å v ^ 2 . 3 1 5 / 7 0 ^ 3 m / s ( m e n d e t v i s s -te vi redaxi från våra kix^iematiska
beräkningar ovan). Om energin pro ducerades under e^exnpelvis 0.5 sekunders koxxtakt med marken blir den avgivna effekten 315/0 .5^^30 ^ a t t . Vissteman verkxm^gsgraden, dvs förhållandet mellan avgiven och tillförd effekt, skulle xnan också kunna beräkna hur mycket metabo liskeffekt(energi)somgickåt.
begreppet verkningsgrad blir centralt när det gäller tekniken för att ta sig fram medsålxtenenergiåtgång som möjligt i t.ex gåxxg, löpning, längdskidåkning och simning (jfr Thorstensson 19^) . Av metodologiska skäl, särskilt svårigheten att kvantifiera avgiven effekt (energi), nöjer man sig ofta med att diskutera begreppet rörelseekonomi. Man xnäter helt enkelt syreupptagningen uxxder ett visst standardiserat sub-maximalt (aerobt) arbete, t.ex.löp-xmigmeden viss hastigbet.hx mer syre det kostar, desto säxnre (löp)ekoxiomi. Man skall ha klart för sig att detta är ett relativt grovt mått sompåverkasavmånga olika faktorer. Man har försökt koppla olika individuella löpteknxska variabler med löpekonomi, hittills utan fram-gåxig. Däremot har löpare som maxi, subjektivt, ansett ha dålig löpekonomi, haft stor framgång (Figurs).
Aero-ocbbydrodynamlk
Mångaidrotter ixmebär förflyttningar iluft och/eller vattexi. Detta presenterar specifika problem ocb utmaningar vad gäller rörelseteknxk. särskilt om hastigheten ä r h ö g b l i r motståndet fråxi luften/vattnet stort. Frakte^empel på detta är cykling, hastighetsåkxnng på skridsko och störtlopp där det genomgående gäller attmxxmneraluftmotståndet.Mot-ståxidet minskas hxxvudsakligen gexiom att minska den area som exponeras mot luften/vatmet samt förbättra strömlxnjeformen.lsxxnning råder alldeles speciella förhållandexii ochmedattvattnet dels har betydligt större dexisitetäx^ luft, dels erbjuder både motståxidetmotframfärden och förutsättningen för framdriften.
Frojektilers rörelser genom luft/vatten påverkas också av deras form ochytbeskaffenhet,lutnmgiförhål lande till hxft/vattenströmmen, eventuell rotation och vibration, m.m.. bollar som skruvas får föränd rade baxioriluften och studsar mot underlag ochracketar (underskruv ger exempelvis förläx^gd luftfärd och
större ix^bromsningistudsen).Över huvud taget är aero/bydrodyna mik så central för teknxkex^ i flera grenar att den borde få en egen mässa - doek faller dex i utaxxför demxa översiktliga framstälmmg.
IVIerombio-lblomel^anik
Mekanikens lagarochprineiper ger förutsättnix^gar för rörelseanalys och teknikförståelse. Det faktum att vi har med biologiskt ^xnaterial^ att göraadderar enytterligare dimexi-sion och gör a t t ia l la fall förståelsexx bli klartsvårare/ixitressantare. 13io-logix^xnxiebär jub land amiata t t vi bar egx^a kraftgeneratorer, muskler-xia, s o m i m å n g t ochmycket lyder egna xnuskelxnekaxxiska lagar oeh vars engagemang och kraftutveckling på ett intrikat sätt styrs av vårt x^ervsystexn.
Muskelmekaniska faktorers betydelse för kraftutvecklmg har avnandlats itidigare,likx^ax^desammarxhax^g(e^. Tl^oxstensson 19^5). Helt kort bör ändå här sägas att typ av mxxskelak-tion, dvs om dex x aktiverade muskeln uxidergår en läx^gdföräx^dring eller inte, saxnt om längdförändringex^ ixuiebär en förlängxiing (eeeexxtrisk aktiox^^strävar att bromsa rörelsex^) eller exx förkortxiing (koxxcexitrisk aktiox^x^strävar att accelerera rörelsen) är av avgöraxxde betydelse.Den xna^xmalakraftutvecklixigenärklart högre xmder eccexitriskaförhållaxiden oeh skilinadenbli större juhögre has-tighetexi är. självklart föreligger inte alltid dexma kraftskxllxiad - uxxder ickexna^imalaförbållax^dex^ bestämmer aktiveringsgraden (kraftbehovet) hur stor kraftpxodx^ktionex^blxri exi given situatioxi. Man kan också genom att låta en eccentrisk aktion direkt föregå exx kox^exxtrxsk öka kraf-tutvecklingexxidex^senare^stretch-shortex^ing^). Detta blir ett viktigt inslag i teknxkexx och gör att det under vissa betxngelserkaxivaraen fördelatt förkorta tiden förkraftutvecklingen (jfr impulsresonemanget ovan). Axxdra xnuskelxnekaniska faktorer att t a h ä n s y n t i l l ä r muskelns läx igd och dex^ tid som står till förfo gaxxde för att utveckla muskelkraft.
Även vid enmycket ytlig betraktelse slås man avdengigantiskaxxppgift som nervsystemet (^N^)stårmför , och oftast löser på ett någorlunda tillfredsställaxide sätt, när det gäller koordinationen av våra rörelser. ^N2 har att aktivera rätt muskler.

Svensk Idrot ts forskning n r 1 D 1 9 9 8 • t e *
faktiskt också rätt muskelfibrer, i rätt ögonblick, anpassa akövcrings-graden, via rekrytering och/eller frekvensmodulering, till rådande muskelmckaniska förhållanden såväl som öll övriga mekaniska faktorer, som tröghetsmoment, överföring av rörelsemängdsmoment samt inverkan av tyngdkraft, kontaktkrafter och luftmotstånd. Dessutom tillkommer ofta kravet på balanskontroll i samband med rörelserna. Uppenbart krävs detaljerad informaöon om vad som pågår, från receptorer i muskler, leder, ligament, senor och hud, innerörat och synen, liksom om de styrsignaler som går ut från olika centra och nivåer i CNS. Denna informaöon måste samordnas och anpassas till ändrade yttre och inre förhållanden. Det är ingen tvekan om att vårt nervsystem måste "kunna" en hel del biomekanik!
Referens- och litteraturlista
Bloomfield,)., TJL Ackland and B.C. EHiot. Applied Anatomy aod Biomechanics in Sport Human Kinetics, 1994.
Carr, CA. Mechanics of Sport. A Pracööo-ner*s Guide. Human Kinedcs, 1997.
Daggfeldt, K. Från jättars axlar - En presentation av de naturlagar som styr rörelse. Svensk Idrottsforskning 1,1998.
Enoka, RAL Neuromechanical Basis of Kine-siology. Human Kinetics, 1994.
Grabiner, M.D. (editor) Journal of Applied Biomechanics (quarterly journal). Human Kinetics.
Hay, J.G. The Biomechanics of Sports Techni-ques. Prentice Hall, 1993.
LeVeau, B.F. Williams & LissneKs: Biomechanics of Human Motion. Saunders, 1991.
Nigg, BAL and W. Herzog. Biomechanics of the Musculo-Skeleta! System. Wiley, 1994.
Thorstensson, A. Några tillämpningar av biomekaniska principer på styrkeutveckling och styrketräning. I boken: Styrketräning. Idrottens Forskningsråd, RF och Folksam,
Thorstensson, A. Neuromuskulära och biomekaniska synpunkter på teknik i uthållighetsgrenar. 1 boken: Konditionsträning. Idrottens Forskningsråd och RF, 198B.
Thorstensson, A. Biomekanik - bas for idrotts- och arbetsteknik (kompendium). Idrottshögskolan, 1992.
Thorstensson, A. Teknik för teknikstudier. Svensk Idrottsforskning 1,199B.
Winter, D.A. Biomechanics and Motor Control of Human Movement. Wiley, 1990. ffgwr 4. Eff ezempe/ pJ en/rumgdngsnt /öpare fEmi/ Zatopek) med fi// synes ddf/g
febuTr - föpekonomi. Skenet kan dock bedra odi ndgm mäfDörden, att grimda bedömningen pj,/rnns fnfe.