Embed Size (px)
Citation preview
18. ÜNİTE
BİR VE ÜÇ FAZLI MOTORLAR
KONULAR1. DOĞRU AKIM MOTORLARI, YAPILIşLARI VE ÇEşİTLERİ
2. ÜÇ FAZLI ASENKRON MOTORLARIN YAPISI VE ÇALIşMA PRENSİBİ
3. BİR FAZLI ASENKRIN MOTORLARIN YAPISI VE ÇALIşMA PRENSİBİ
4. BİR FAZLI ÜNİVERSEL MOTORLARIN YAPISI VE ÇALIşMA PRENSİBİ
5. MOTOR ETİKETLERİNİN İNcELENMESİ
251
3. SINIF ELEKTRİK TESİSATÇILIĞIELEKTRİK BİLGİSİ
18.1 DOĞRU AKIM MOTORLARI, yAPILIŞLARI VE ÇEŞİTLERİ
Doğru akım elektrik enerjisini mekanik enerjiye dönüştüren elektrik makine-lerine doğru akım motoru adı verilir. Doğru akım motorlarının çalışma prensibi hak-kında sizlere l6.ünitede gerekli bilgiler verilmiştir. Bu ünitede doğru akım motorları-nın çeşitleri hakkında sizlere bilgi verilecektir.
Doğru akım motorları; dinamolarda olduğu gibi uyartım (kutup ) sargılarının endüviye bağlanış şekline göre;
• Seri motor,
• şönt motor ve
• Kompunt motor olmak üzere üç kısma ayrılır.
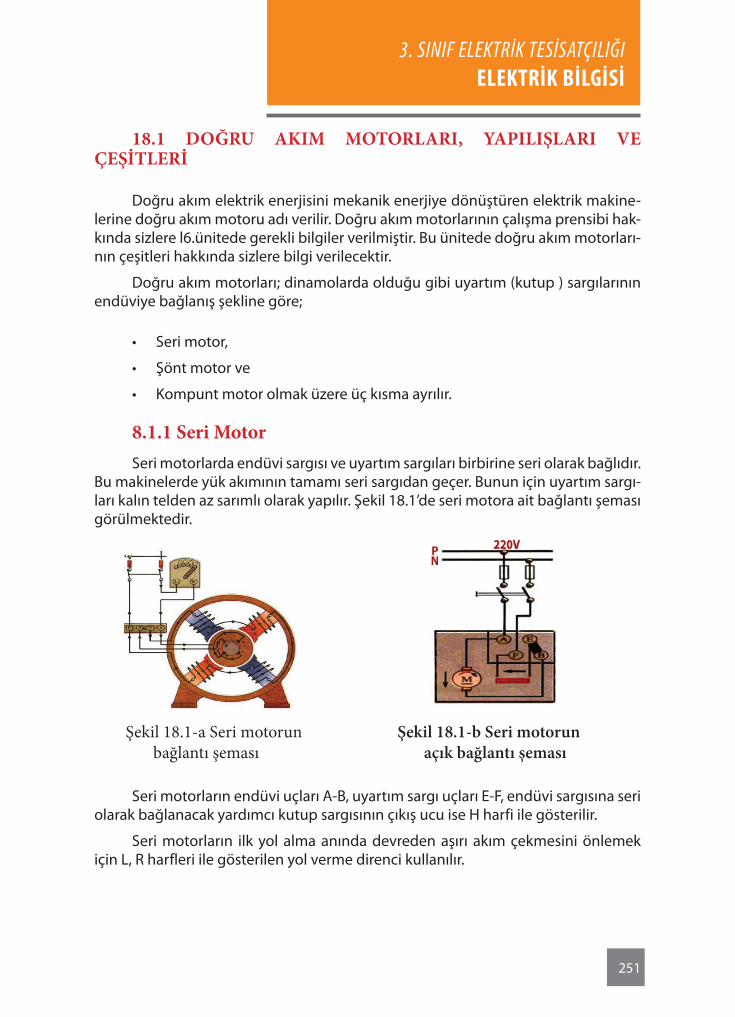
8.1.1 Seri MotorSeri motorlarda endüvi sargısı ve uyartım sargıları birbirine seri olarak bağlıdır.
Bu makinelerde yük akımının tamamı seri sargıdan geçer. Bunun için uyartım sargı-ları kalın telden az sarımlı olarak yapılır. şekil 18.1’de seri motora ait bağlantı şeması görülmektedir.
Şekil 18.1-a Seri motorun Şekil 18.1-b Seri motorun bağlantı şeması açık bağlantı şeması
Seri motorların endüvi uçları A-B, uyartım sargı uçları E-F, endüvi sargısına seri olarak bağlanacak yardımcı kutup sargısının çıkış ucu ise H harfi ile gösterilir.
Seri motorların ilk yol alma anında devreden aşırı akım çekmesini önlemek için L, R harfleri ile gösterilen yol verme direnci kullanılır.
252
3. SINIF ELEKTRİK TESİSATÇILIĞIELEKTRİK BİLGİSİ
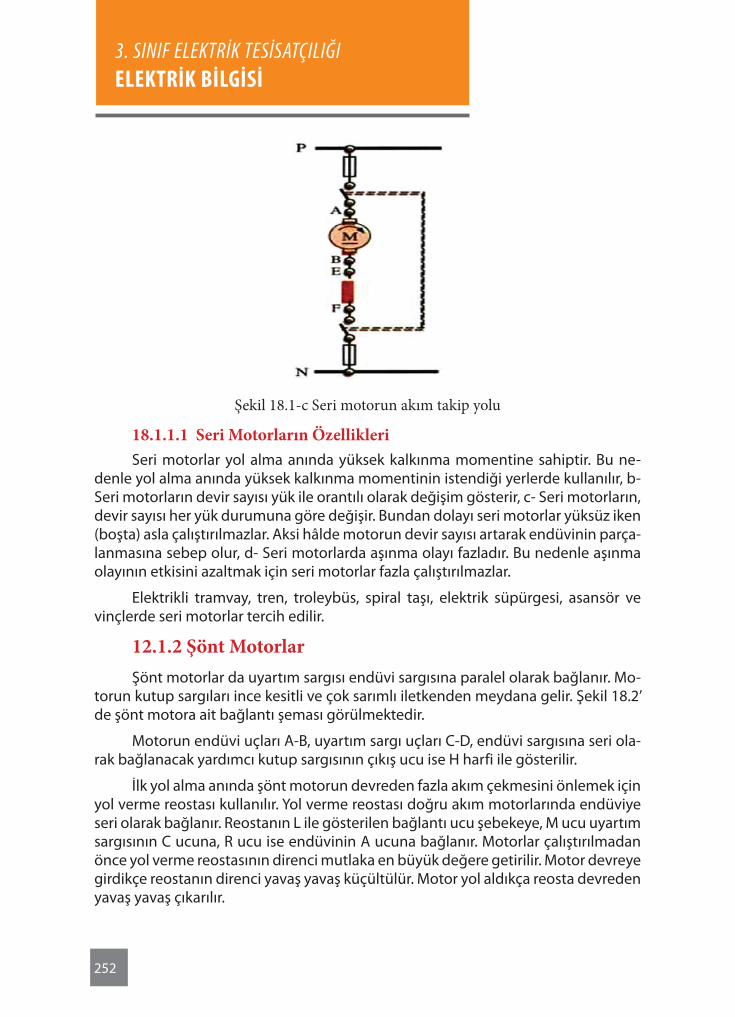
Şekil 18.1-c Seri motorun akım takip yolu
18.1.1.1 Seri Motorların ÖzellikleriSeri motorlar yol alma anında yüksek kalkınma momentine sahiptir. Bu ne-
denle yol alma anında yüksek kalkınma momentinin istendiği yerlerde kullanılır, b- Seri motorların devir sayısı yük ile orantılı olarak değişim gösterir, c- Seri motorların, devir sayısı her yük durumuna göre değişir. Bundan dolayı seri motorlar yüksüz iken (boşta) asla çalıştırılmazlar. Aksi hâlde motorun devir sayısı artarak endüvinin parça-lanmasına sebep olur, d- Seri motorlarda aşınma olayı fazladır. Bu nedenle aşınma olayının etkisini azaltmak için seri motorlar fazla çalıştırılmazlar.
Elektrikli tramvay, tren, troleybüs, spiral taşı, elektrik süpürgesi, asansör ve vinçlerde seri motorlar tercih edilir.
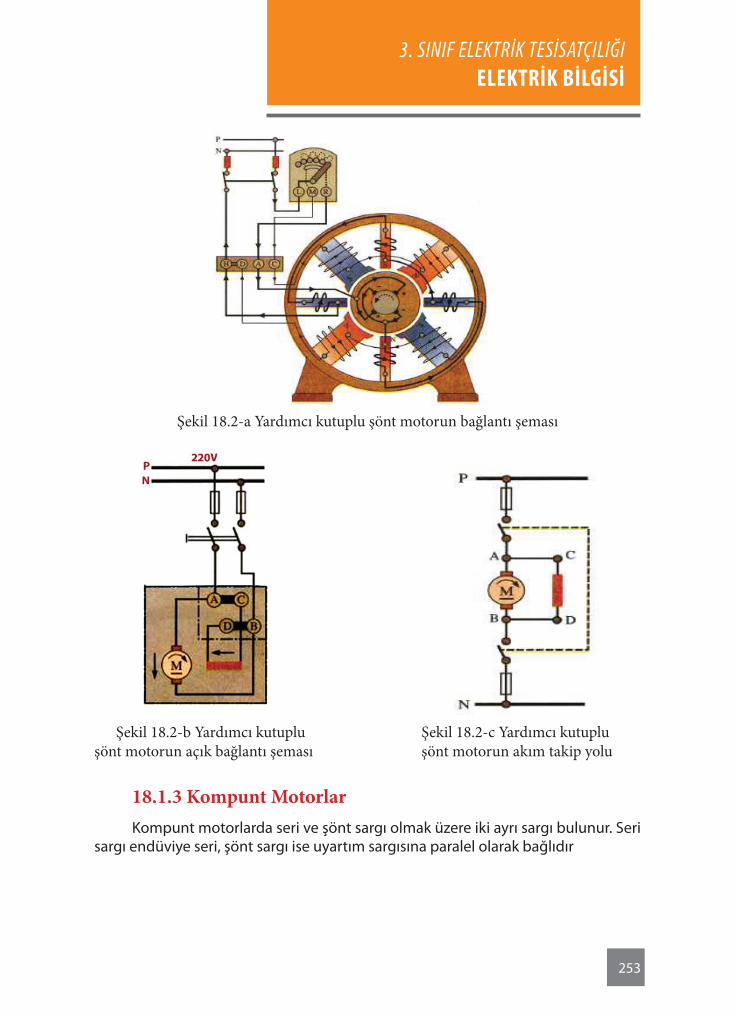
12.1.2 Şönt Motorlarşönt motorlar da uyartım sargısı endüvi sargısına paralel olarak bağlanır. Mo-
torun kutup sargıları ince kesitli ve çok sarımlı iletkenden meydana gelir. şekil 18.2’ de şönt motora ait bağlantı şeması görülmektedir.
Motorun endüvi uçları A-B, uyartım sargı uçları c-D, endüvi sargısına seri ola-rak bağlanacak yardımcı kutup sargısının çıkış ucu ise H harfi ile gösterilir.
İlk yol alma anında şönt motorun devreden fazla akım çekmesini önlemek için yol verme reostası kullanılır. Yol verme reostası doğru akım motorlarında endüviye seri olarak bağlanır. Reostanın L ile gösterilen bağlantı ucu şebekeye, M ucu uyartım sargısının c ucuna, R ucu ise endüvinin A ucuna bağlanır. Motorlar çalıştırılmadan önce yol verme reostasının direnci mutlaka en büyük değere getirilir. Motor devreye girdikçe reostanın direnci yavaş yavaş küçültülür. Motor yol aldıkça reosta devreden yavaş yavaş çıkarılır.
253
3. SINIF ELEKTRİK TESİSATÇILIĞIELEKTRİK BİLGİSİ
Şekil 18.2-a Yardımcı kutuplu şönt motorun bağlantı şeması
Şekil 18.2-b Yardımcı kutuplu Şekil 18.2-c Yardımcı kutupluşönt motorun açık bağlantı şeması şönt motorun akım takip yolu
18.1.3 Kompunt MotorlarKompunt motorlarda seri ve şönt sargı olmak üzere iki ayrı sargı bulunur. Seri
sargı endüviye seri, şönt sargı ise uyartım sargısına paralel olarak bağlıdır
254
3. SINIF ELEKTRİK TESİSATÇILIĞIELEKTRİK BİLGİSİ
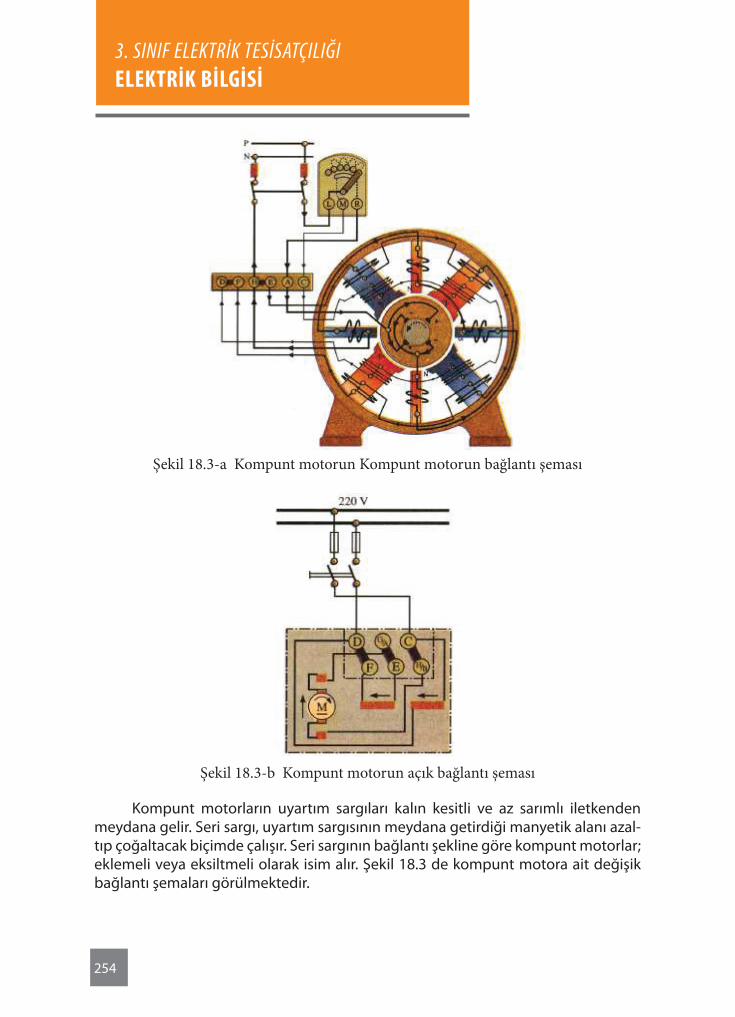
Şekil 18.3-a Kompunt motorun Kompunt motorun bağlantı şeması
Şekil 18.3-b Kompunt motorun açık bağlantı şeması
Kompunt motorların uyartım sargıları kalın kesitli ve az sarımlı iletkenden meydana gelir. Seri sargı, uyartım sargısının meydana getirdiği manyetik alanı azal-tıp çoğaltacak biçimde çalışır. Seri sargının bağlantı şekline göre kompunt motorlar; eklemeli veya eksiltmeli olarak isim alır. şekil 18.3 de kompunt motora ait değişik bağlantı şemaları görülmektedir.
255
3. SINIF ELEKTRİK TESİSATÇILIĞIELEKTRİK BİLGİSİ
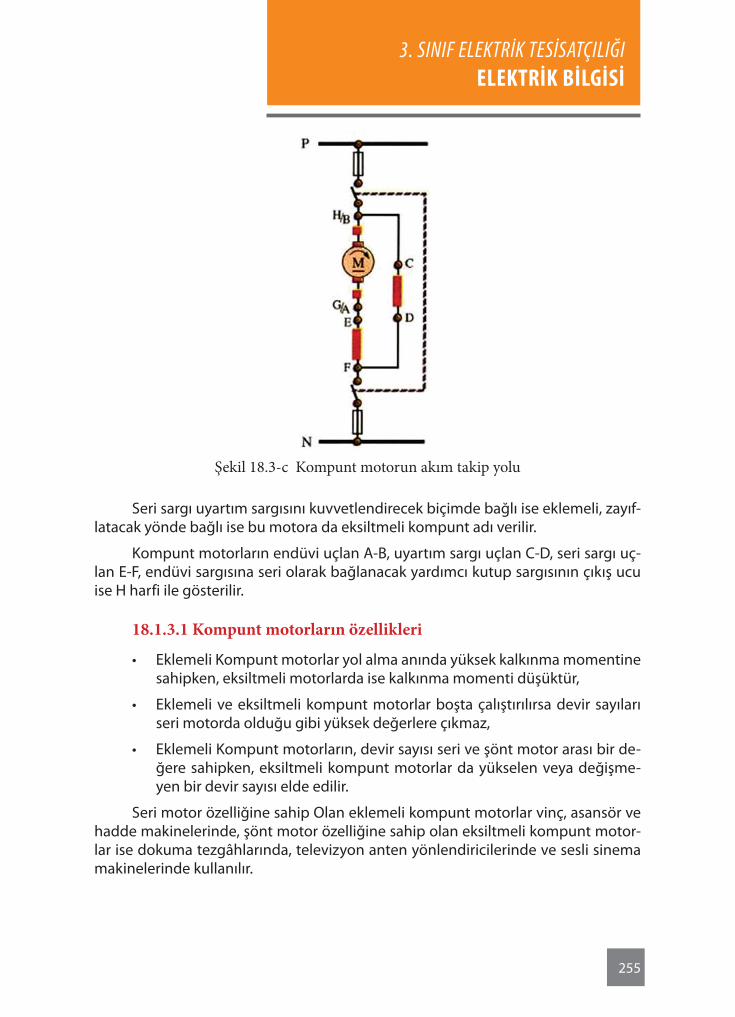
Şekil 18.3-c Kompunt motorun akım takip yolu
Seri sargı uyartım sargısını kuvvetlendirecek biçimde bağlı ise eklemeli, zayıf-latacak yönde bağlı ise bu motora da eksiltmeli kompunt adı verilir.
Kompunt motorların endüvi uçlan A-B, uyartım sargı uçlan c-D, seri sargı uç-lan E-F, endüvi sargısına seri olarak bağlanacak yardımcı kutup sargısının çıkış ucu ise H harfi ile gösterilir.
18.1.3.1 Kompunt motorların özellikleri
• Eklemeli Kompunt motorlar yol alma anında yüksek kalkınma momentine sahipken, eksiltmeli motorlarda ise kalkınma momenti düşüktür,
• Eklemeli ve eksiltmeli kompunt motorlar boşta çalıştırılırsa devir sayıları seri motorda olduğu gibi yüksek değerlere çıkmaz,
• Eklemeli Kompunt motorların, devir sayısı seri ve şönt motor arası bir de-ğere sahipken, eksiltmeli kompunt motorlar da yükselen veya değişme-yen bir devir sayısı elde edilir.
Seri motor özelliğine sahip Olan eklemeli kompunt motorlar vinç, asansör ve hadde makinelerinde, şönt motor özelliğine sahip olan eksiltmeli kompunt motor-lar ise dokuma tezgâhlarında, televizyon anten yönlendiricilerinde ve sesli sinema makinelerinde kullanılır.
256
3. SINIF ELEKTRİK TESİSATÇILIĞIELEKTRİK BİLGİSİ
18.2 ÜÇ FAzLI ASENKRON MOTORLARIN yAPISI VE ÇALIŞMA PRENSİBİ
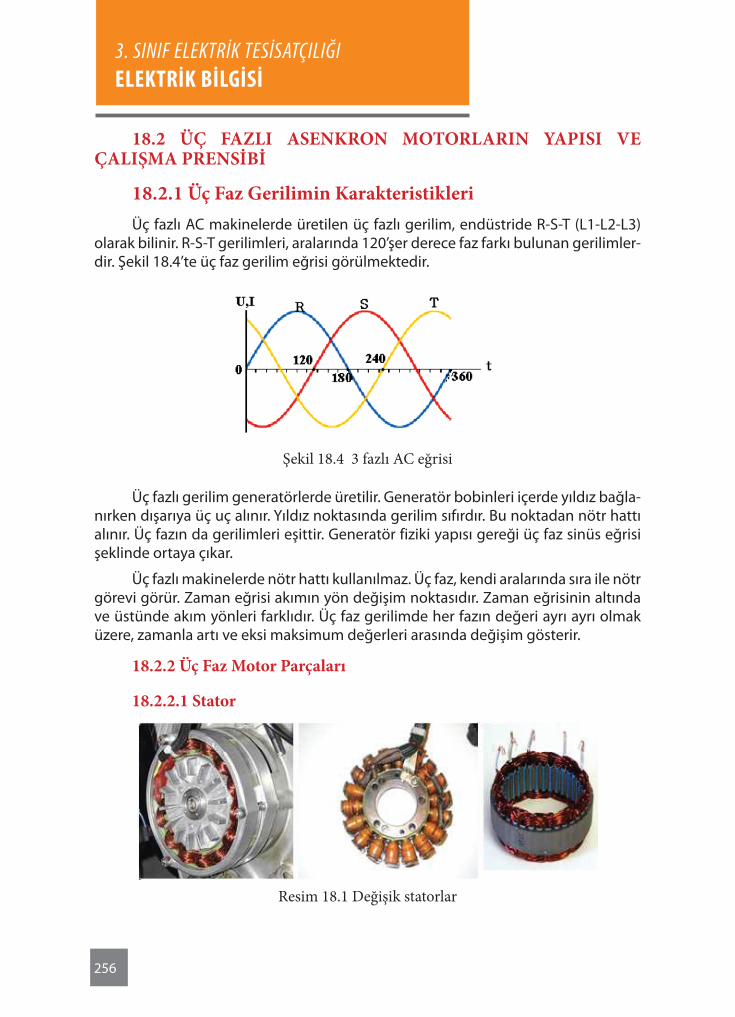
18.2.1 Üç Faz Gerilimin Karakteristikleri Üç fazlı Ac makinelerde üretilen üç fazlı gerilim, endüstride R-S-T (L1-L2-L3)
olarak bilinir. R-S-T gerilimleri, aralarında 120’şer derece faz farkı bulunan gerilimler-dir. şekil 18.4’te üç faz gerilim eğrisi görülmektedir.
Şekil 18.4 3 fazlı AC eğrisi
Üç fazlı gerilim generatörlerde üretilir. Generatör bobinleri içerde yıldız bağla-nırken dışarıya üç uç alınır. Yıldız noktasında gerilim sıfırdır. Bu noktadan nötr hattı alınır. Üç fazın da gerilimleri eşittir. Generatör fiziki yapısı gereği üç faz sinüs eğrisi şeklinde ortaya çıkar.
Üç fazlı makinelerde nötr hattı kullanılmaz. Üç faz, kendi aralarında sıra ile nötr görevi görür. Zaman eğrisi akımın yön değişim noktasıdır. Zaman eğrisinin altında ve üstünde akım yönleri farklıdır. Üç faz gerilimde her fazın değeri ayrı ayrı olmak üzere, zamanla artı ve eksi maksimum değerleri arasında değişim gösterir.
18.2.2 Üç Faz Motor Parçaları
18.2.2.1 Stator
Resim 18.1 Değişik statorlar
257
3. SINIF ELEKTRİK TESİSATÇILIĞIELEKTRİK BİLGİSİ
Stator üç fazlı motorun hareket etmeyen kısmıdır. Dc makinelerin indüktörü-ne benzer. Üç fazlı döner manyetik alan sargıları burada bulunur. Şekil 18.5’te deği-şik statorlar görülmektedir.
18.2.2.2 Rotor
Üç fazlı motorların dönen kısmına rotor denir. Sincap kafesli ve sargılı olmak üzere iki çeşidi vardır. Bunlar;
• Sincap Kafesli Rotor
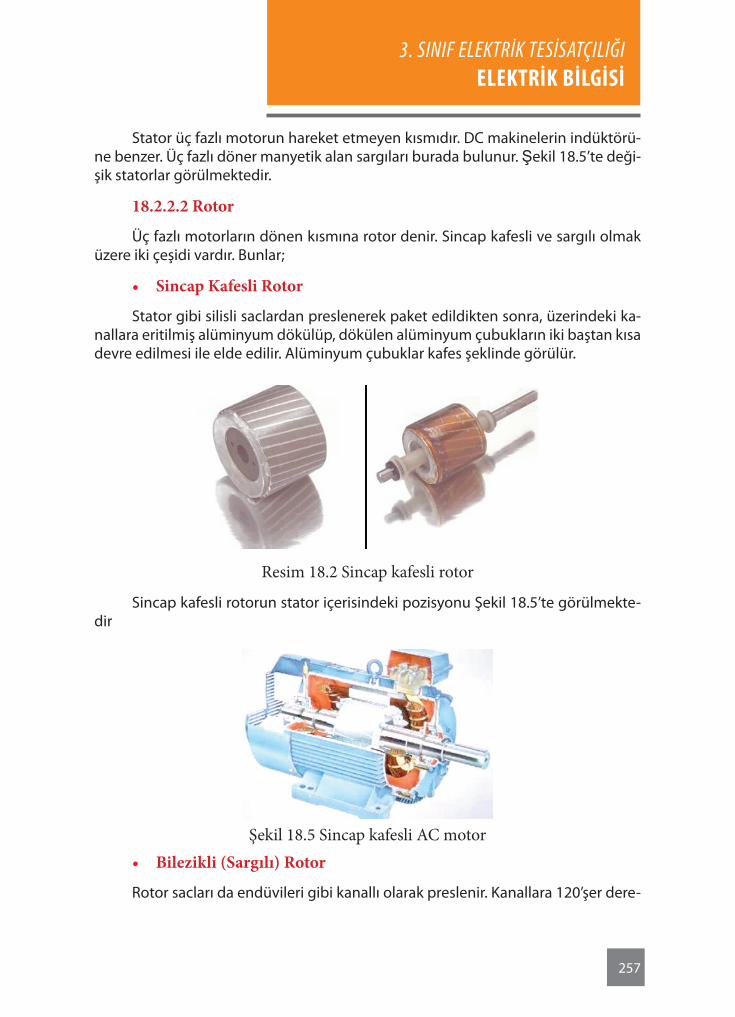
Stator gibi silisli saclardan preslenerek paket edildikten sonra, üzerindeki ka-nallara eritilmiş alüminyum dökülüp, dökülen alüminyum çubukların iki baştan kısa devre edilmesi ile elde edilir. Alüminyum çubuklar kafes şeklinde görülür.
Resim 18.2 Sincap kafesli rotor
Sincap kafesli rotorun stator içerisindeki pozisyonu şekil 18.5’te görülmekte-dir
Şekil 18.5 Sincap kafesli AC motor• Bilezikli (Sargılı) Rotor
Rotor sacları da endüvileri gibi kanallı olarak preslenir. Kanallara 120’şer dere-
258
3. SINIF ELEKTRİK TESİSATÇILIĞIELEKTRİK BİLGİSİ
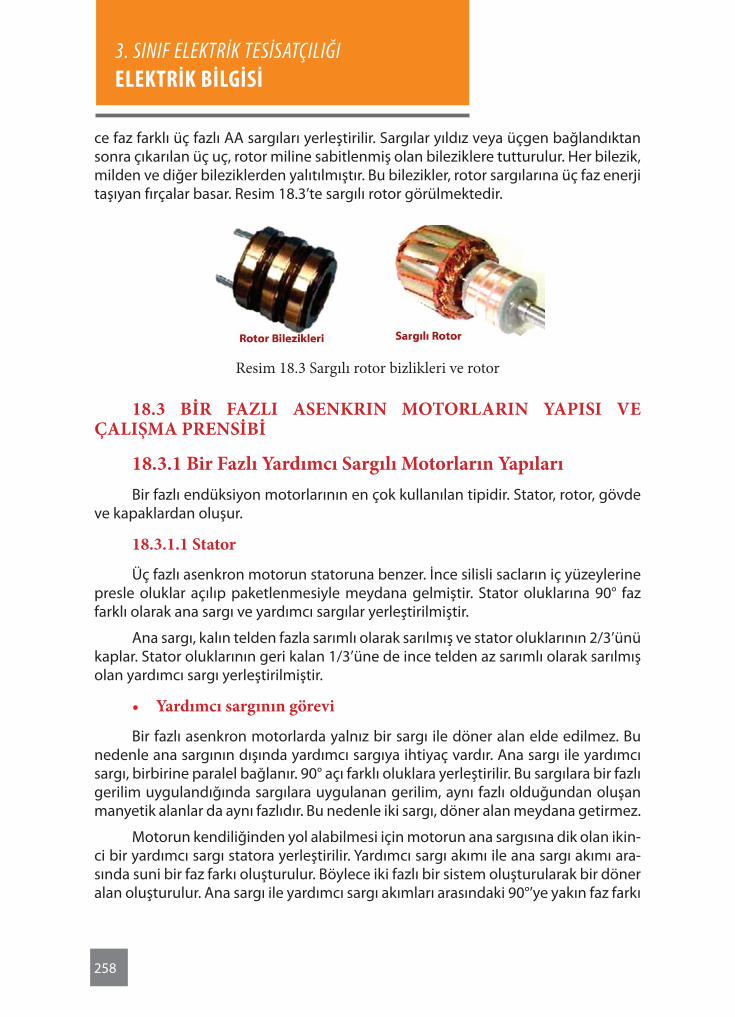
ce faz farklı üç fazlı AA sargıları yerleştirilir. Sargılar yıldız veya üçgen bağlandıktan sonra çıkarılan üç uç, rotor miline sabitlenmiş olan bileziklere tutturulur. Her bilezik, milden ve diğer bileziklerden yalıtılmıştır. Bu bilezikler, rotor sargılarına üç faz enerji taşıyan fırçalar basar. Resim 18.3’te sargılı rotor görülmektedir.
Resim 18.3 Sargılı rotor bizlikleri ve rotor
18.3 BİR FAzLI ASENKRIN MOTORLARIN yAPISI VE ÇALIŞMA PRENSİBİ
18.3.1 Bir Fazlı yardımcı Sargılı Motorların yapılarıBir fazlı endüksiyon motorlarının en çok kullanılan tipidir. Stator, rotor, gövde
ve kapaklardan oluşur.
18.3.1.1 Stator
Üç fazlı asenkron motorun statoruna benzer. İnce silisli sacların iç yüzeylerine presle oluklar açılıp paketlenmesiyle meydana gelmiştir. Stator oluklarına 90° faz farklı olarak ana sargı ve yardımcı sargılar yerleştirilmiştir.
Ana sargı, kalın telden fazla sarımlı olarak sarılmış ve stator oluklarının 2/3’ünü kaplar. Stator oluklarının geri kalan 1/3’üne de ince telden az sarımlı olarak sarılmış olan yardımcı sargı yerleştirilmiştir.
• yardımcı sargının görevi
Bir fazlı asenkron motorlarda yalnız bir sargı ile döner alan elde edilmez. Bu nedenle ana sargının dışında yardımcı sargıya ihtiyaç vardır. Ana sargı ile yardımcı sargı, birbirine paralel bağlanır. 90° açı farklı oluklara yerleştirilir. Bu sargılara bir fazlı gerilim uygulandığında sargılara uygulanan gerilim, aynı fazlı olduğundan oluşan manyetik alanlar da aynı fazlıdır. Bu nedenle iki sargı, döner alan meydana getirmez.
Motorun kendiliğinden yol alabilmesi için motorun ana sargısına dik olan ikin-ci bir yardımcı sargı statora yerleştirilir. Yardımcı sargı akımı ile ana sargı akımı ara-sında suni bir faz farkı oluşturulur. Böylece iki fazlı bir sistem oluşturularak bir döner alan oluşturulur. Ana sargı ile yardımcı sargı akımları arasındaki 90°’ye yakın faz farkı
259
3. SINIF ELEKTRİK TESİSATÇILIĞIELEKTRİK BİLGİSİ
üç yöntemle oluşturulabilir. Yardımcı sargı devresine seri olarak;
• Omik direnç
• Kapasitör (kondansatör)
• Endüktans (bobin) bağlanabilir.
18.3.1.2 Rotor
Bir fazlı asenkron makinelerin rotoru, genel olarak sincap kafesi biçiminde kısa devre çubuklarından oluşur. Bu çubuklar genellikle alüminyumdan yapılmıştır. Çubuk yerine sargı da kullanılabilir.
• Gövde ve kapaklar Küçük güçlü motorlarda gövde düz yüzeyli, orta güçlü motorlarda ise ısıyı
havaya aktarmak amacıyla gövde çıkıntılı yüzeyli olarak yapılır. Kapaklar gövdeye saplamalarla monte edilir. Kapaklardaki oyuklar rulmanlar aracılığıyla rotora taşınır.
18.4 BİR FAzLI ASENKRIN MOTORLARIN yAPISI VE ÇALIŞMA PRENSİBİ
Stator ve rotor manyetik gövdeleri sac paketlerden oluşan A. A. seri motoru, hem alternatif hem doğru akım ile ve benzer karakteristik özellikler göstererek çalı-şabildiğinden bu motorlara “üniversal motorlar” da denilir.
Aynı zamanda kutup ve endüvi sargıları birbirine seri olarak bağlanan seri mo-torların yapı ve çalışma karakteristiklerini de taşıdığından bu motorlara “üniversal seri motorlar” da denilir.
18.4.1Üniversal motorların özellikleri• Üniversal motorlar 1 / 500 HP ile 2 / 3 HP arasında çok küçük güçte imal
edilir.
• Kalkınma ve döndürme momentleri yüksektir.
• Devir sayıları yükle değişir.
• Boştaki devir sayıları çok yüksektir.
• Devirleri 15000 - 20000 d/d’ya kadar çıkarılabilir.
• Üniversal motorlar A. A. ile çalıştırıldığı zaman D. A. göre “devir sayısı - yük” karakteristiği düşüktür.
18.4.2 Üniversal Motorların yapısıÜniversal motorların yapısında hem D. c.de hem de A. c.de çalışma özelliğini

260
3. SINIF ELEKTRİK TESİSATÇILIĞIELEKTRİK BİLGİSİ
gösterebilmesi için stator (endüktör), rotor (endüvi)nin yanında kolektör ve fırçaları bulunmaktadır. Resim 18.4’de üniversal motor ve parçaları görülmektedir.
Resim 18.4 Üniversal motor ve parçaları
18.4.2.1 Endüktör (Kutup)
Üniversal motorlarda manyetik alanın meydana geldiği kısımdır. Endüktöre kutup da denilmektedir. Kutup uzunluğu, yaklaşık olarak endüvi uzunluğuna eşittir.
Endüktörler kutuplara sargılar sarılarak bu sargıların enerjilendirilmesiyle mık-natıslık özelliği kazandırılmış elektromıknatıslardan yapılır. Resim 18.5’de üniversal motorun boş kutupları ve sargısı sarılmış kutuplar görülmektedir.
Resim 18.5 Üniversal motorların kutup yapısı
18.4.2.2 Endüvi
Gerilim indüklenen ve iletkenleri taşıyan kısma endüvi denir.
Üniversal motorlarda endüvi, doğrudan doğruya milin üzerine istiflenmiş di-namo sac paketlerinden meydana gelen endüvi çekirdeği ile silindir şeklinde olan bu çekirdeğin dış kısmına açılmış oluklara yerleştirilen sargılardan meydana gelir.
261
3. SINIF ELEKTRİK TESİSATÇILIĞIELEKTRİK BİLGİSİ
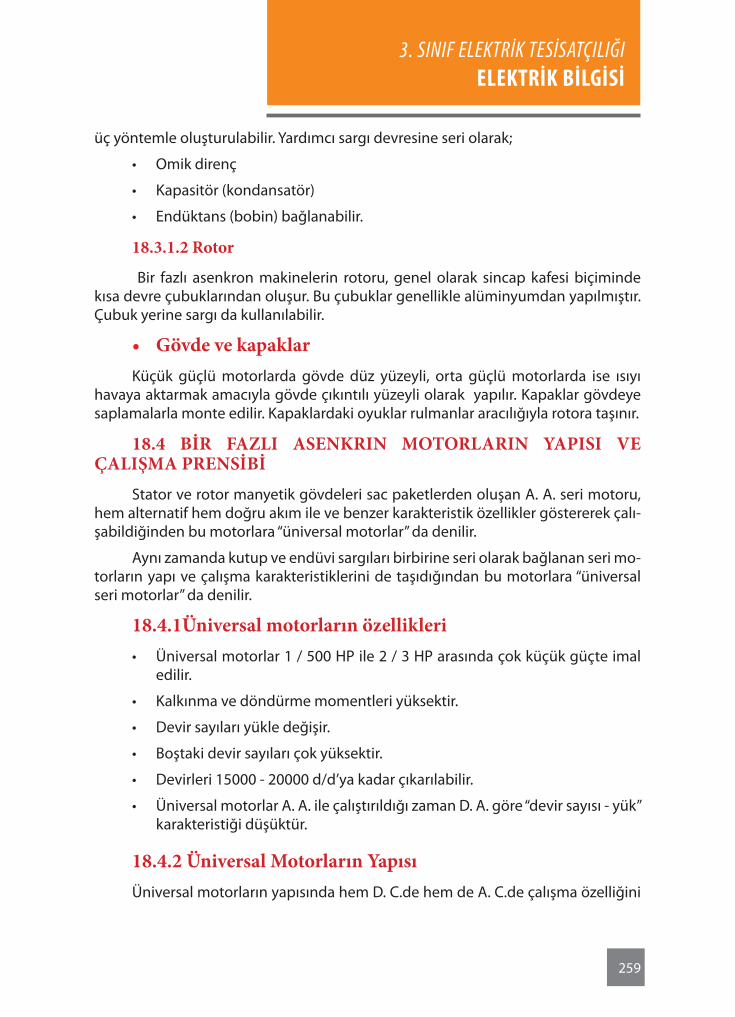
Endüvi, kalınlığı 0,30 - 0,70 mm arasında değişen dinamo saclarından yapılır. Dinamo sacları, istenen şekil ve ölçüde preslerle kesildikten sonra tavlanır ve birer yüzeyleri yalıtılır.
Yalıtma işleminde kâğıt, lak kullanılır ve oksit tabakası oluşturulur. Resim 1.8’de endüvi -kolektör- mil görülmektedir.
Resim 18.6 Kolektör -endüvi – mil
18.4.2.3 Kolektör
Üniversal motorlarda kolektör, endüvi sargılarına D.c gerilim uygulanmasını sağlar.
Kolektör dilimleri, haddeden geçirilmiş sert bakırdan pres edilerek yapılır. Ba-kır dilimleri arasında 0, 5 -1,5 mm kalınlığında mika veya mikanit yalıtkan konulur. Bu kalınlık, kolektörün çapı ve komşu dilimler arasındaki gerilim farkına göre değişir. Bobin uçlarının kolektöre yerleştirilmesi için dilimlere yarıklar açılır ve bobin uçları buralarda yerleştirilerek lehim yapılır.
18.4.2.4 Fırçalar
Üniversal motorlarda şebeke akımını endüvi sargılarından geçirmek için fır-çalar kullanılır. Fırçalar, makinenin akım şiddeti ve gerilimine göre sert, orta sert ve yumuşak karbon veya karbon alaşımdan yapılır.
Üniversal motorlarda bütün fırça çeşitleri ile iyi çalışabilir. Mümkün olduğu ka-dar bir makinede aynı cins fırçalar kullanılmalı ve fırça boyları da eşit olmalıdır.
Üniversal motorlarda fırçalar, kapak üzerine açılmış ve yalıtılmış yuvalara ko-nulur. Fırçaların kolektör yüzeyine oturup işletme boyunca durumunu muhafaza edebilmelerini fırça tutucuları sağlar. Fırça bir taraftan kolektör yüzeyine oturur ve
262
3. SINIF ELEKTRİK TESİSATÇILIĞIELEKTRİK BİLGİSİ
diğer taraftan ise fırça tutucusunun yay tertibatı tarafından kolektör yüzeyine itilir.
18.4.2.5 yataklar ve diğerleri
Elektrik makinelerinin en önemli parçalarından biri de yataklardır. Yataklar, çok arıza yapan ve bakım isteyen kısımdır. Yataklarda meydana gelen aşınmalar, sürtün-meler komütasyonun bozulmasına ve en büyük arızaların doğmasına neden olur.
18.4.2.6 Üniversal Motorların Çalışma Prensibi
Üniversal motorlar, hem D. c. de hem de A. c. de çalışma özelliğini gösterdi-ğinden A.c. çalışma özelliğini incelediğimizde çalışma prensibi anlaşılacaktır. Üni-versal motorlara bir fazlı alternatif gerilim uygulandığında statordaki (kutup) sargı-larından ve rotordaki (endüvi) sargılarından akım geçer. Bu akım, kutup sargılarında manyetik alan meydana getirirken endüvi sargılarından da geçer.
“Manyetik alan içerisinde bulunan iletkenden akım geçirilirse iletkenler, man-yetik alanın dışına doğru itilir”. İndüksiyon prensibine göre üniversal motorlarda da meydana gelen kutup sargılarındaki manyetik alan içerisinde bulunan endüvi sargı-larından akım geçtiği için endüvi iletkenleri, manyetik alanın dışına doğru itilir. A.c gerilim uygulanmaya devam ettiği müddetçe de motor çalışmaya devam eder.
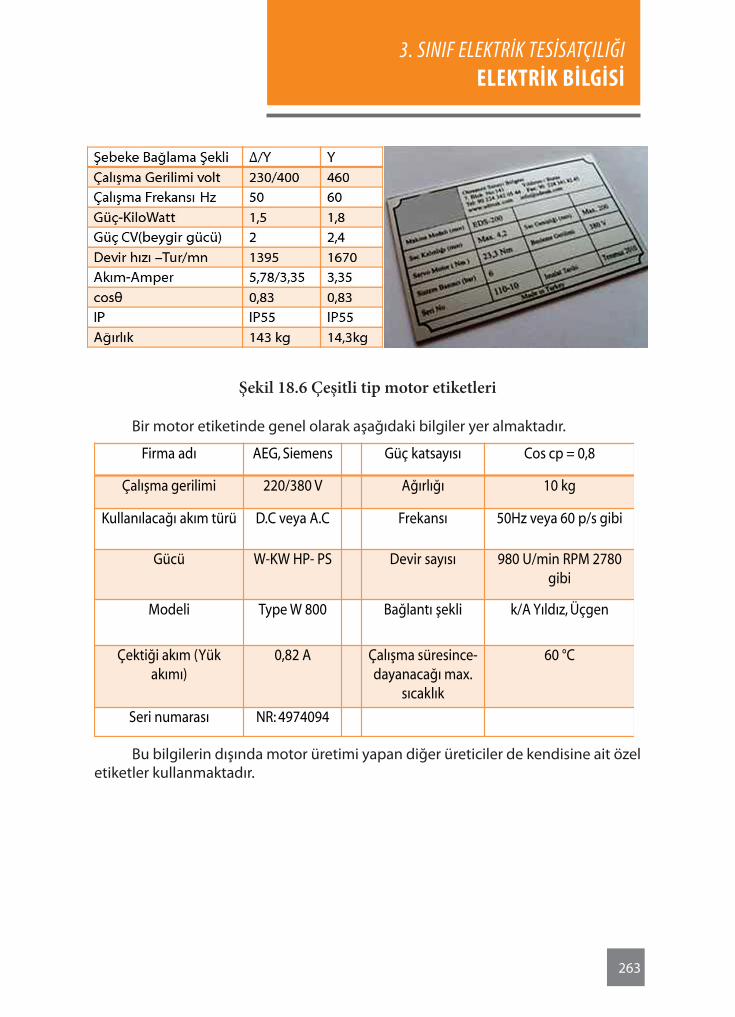
18.5 MOTOR ETİKETLERİNİN İNCELENMESİHer elektrik motorunun gövdesi üzerinde dikdörtgen veya elips şeklinde bir
etiket bulunur. Etiketler prinç veya çinkodan yapılır ve motor gövdesine perçinle tutturulur. Etiket üzerinde motorla ilgili gerekli olan bilgiler yer alır. Motorla ilgili bu bilgiler etiket üzerinde sembol veya yazı ile silinemeyecek biçimde hazırlanır.
şekil 18.6’da iki ayrı motora ait etiket değeri görülmektedir. Etiketlerden solda yer alanı yatay olarak incelendiğinde
İlk üç satırda motoru yapan firmanın adı, motorun tipi, faz sayısı ve motorun seri numarası, dördüncü satırda motorun dakikadaki devir sayısı ile motorun çalışa-cağı şebekenin frekans değeri, beşinci satırda motorun çalışma gerilimi ve bu geri-lim değerinde motorun çektiği akım, altıncı satırda motorun gücü ve güç katsayısı, yedinci satırda motorun ağırlığı, sekizinci satırda motorun çalışma süresince daya-nabileceği maksimum sıcaklık değeri son satırda ise bu motorun üretiminin yapıldı-ğı ülke adı yazılıdır.
İkinci etikette ise
Motorun hangi firma tarafından yapıldığı, kaç fazlı olduğu, yıldız ve üçgen bağlantıda kaç voltluk gerilimin kullanılacağı, yük akımının değeri, motor gücü, mo-torun şebeke frekansı, güç katsayısı ve devir sayısının değerleri rahatlıkla görülür.
263
3. SINIF ELEKTRİK TESİSATÇILIĞIELEKTRİK BİLGİSİ
Şekil 18.6 Çeşitli tip motor etiketleri
Bir motor etiketinde genel olarak aşağıdaki bilgiler yer almaktadır.
Firma adı AEG, Siemens Güç katsayısı Cos cp = 0,8
Çalışma gerilimi 220/380 V Ağırlığı 10 kg
Kullanılacağı akım türü D.C veya A.C Frekansı 50Hz veya 60 p/s gibi
Gücü W-KW HP- PS Devir sayısı 980 U/min RPM 2780 gibi
Modeli Type W 800 Bağlantı şekli k/A Yıldız, Üçgen
Çektiği akım (Yük akımı)
0,82 A Çalışma süresince-dayanacağı max.
sıcaklık
60 °C
Seri numarası NR: 4974094
Bu bilgilerin dışında motor üretimi yapan diğer üreticiler de kendisine ait özel etiketler kullanmaktadır.
264
3. SINIF ELEKTRİK TESİSATÇILIĞIELEKTRİK BİLGİSİ
ÖzETDoğru akım elektrik enerjisini mekanik enerjiye dönüştüren elektrik makinele-
rine doğru akım motoru adı verilir. Doğru akım motorları; dinamolarda olduğu gibi uyartım (kutup ) sargılarının endüviye bağlanış şekline göre seri motor, şönt motor ve kompunt motor olmak üzere üç kısma ayrılır.
1- Seri Motorlar:Seri motorlarda endüvi sargısı ve uyartım sargıları birbirine seri olarak bağlı-
dır. Bu makinelerde yük akımının tamamı seri sargıdan geçer. Bunun için uyartım sargıları kalın telden az sarımlı olarak yapılır. Seri motorların ilk yol alma anında dev-reden aşırı akım çekmesini önlemek için L,R harfleri ile gösterilen yol verme direnci kullanılır.
2- şönt Motorlar:şönt motorlar da uyartım sargısı endüvi sargısına paralel olarak bağlanır. Mo-
torun kutup sargıları ince kesitli ve çok sarımlı iletkenden meydana gelir. İlk yol alma anında şönt motorun devreden fazla akım çekmesini önlemek için yol verme re-ostası kullanılır. Yol verme reostası doğru akım motorlarında endüviye seri olarak bağlanır. Reostanın L ile gösterilen bağlantı ucu şebekeye, M ucu uyartım sargısının c ucuna, R ucu ise endüvinin A ucuna bağlanır. Motorlar çalıştırılmadan önce yol verme reostasının direnci mutlaka en büyük değere getirilir. Motor devreye girdikçe reostanın direnci yavaş yavaş küçültülür. Motor yol aldıkça reosta devreden yavaş yavaş çıkarılır. Böylece endüviden geçen akım güvenli sınırlar içinde tutulur.
3- Kompunt Motorlar:Kompunt motorlarda seri ve şönt sargı olmak üzere iki ayrı sargı bulunur. Seri
sargı endüviye seri, şönt sargı ise uyartım sargısına paralel olarak bağlıdır.
Kompunt motorların uyartım sargıları kalın kesitli ve az sarımlı iletkenden meydana gelir. Seri sargı, uyartım sargısının meydana getirdiği manyetik alanı azal-tıp çoğaltacak biçimde çalışır. Seri sargının bağlantı şekline göre kompunt motorlar, eklemeli veya eksiltmeli olarak isim alır.
Seri sargı uyartım sargısını kuvvetlendirecek biçimde bağlı ise eklemeli, zayıf-latacak yönde bağlı ise bu motora da eksiltmeli kompunt adı verilir.
Asenkron motorlar Faraday’ın “manyetik alan etkisinde kalan ve içerisinden akım geçen bir iletkende meydana gelen kuvvet “ prensibine göre çalışan makine-lerdir.
Bütün asenkron motorlar genel olarak alternatif gerilimin uygulandığı stator adı verilen sabit kısım ile stator içerisinde dönen ve rotor olarak isimlendirilen iki ana parçadan meydana gelir. Asenkron motorlar da bu parçaların dışında gövde, kapak ve yatak gibi yardımcı kısımlar bulunur.
265
3. SINIF ELEKTRİK TESİSATÇILIĞIELEKTRİK BİLGİSİ
Asenkron motorlar da transformatörler gibi indükleme esasına göre çalışırlar. Bundan dolayı asenkron motorlara indüksiyon motoru da denilir. Asenkron motor ile transformatörlerin aralarındaki tek fark transformatörler duran, asenkron motor-lar ise hareket eden makinelerdir
Rotor hızı ve kayma:Asenkron motorun statorunda, alanın döndüğü hıza senkron hızı denir. Ro-
tor hiçbir zaman senkron hızla dönemez. Eğer rotor senkron hızla dönecek olursa ; stator alanı rotor çubukları ile aynı doğrultuda bulunacağı için, çubuklar alan tara-fından kesilmez. Bu durumda çubuklarda bir e.m.k. indüklenmez ve bir moment de oluşmaz. İndükleme ile e.m.k elde etmek için rotor iletkenlerinin bir alan tarafından kesilmesi gerekir. Bu nedenden dolayı rotor hızı, mutlaka döner alanın hızından ge-ride olmak zorundadır.
Motor miline bir yük uygulandığında, rotor hızı daha da düşer. Senkron hızla dönen stator alanı rotor çubuklarını daha büyük hızla keseceği için çubuklarda in-düklenen akım ve gerilim değerleri de artar. Rotor hızının azalması ile indüklenen akım ve gerilim ile birlikte döndürme kuvvetini veya döndürme momenti de artar.
266
3. SINIF ELEKTRİK TESİSATÇILIĞIELEKTRİK BİLGİSİ
DEĞERLENDİRME SORULARI1-Aşağıdakilerden hangisi doğru akım motorlarından değildir?
A. Sönt motorlar B. Seri motorlar c. Asenkron motorlarD. Konpunt motorlar
2- Aşağıdakilerden hangisi şönt motorların uyartım sargısı uçlarını ifade eder?A. c-D B. A-B c. E-FD. H
3- Aşağıdakilerden hangisi Seri motorların yol alma anında devrede aşırı akım çekmesini önlemek için kullanılan yol verme direncini ifade eder?
A. E-F B. L-R c. A-BD. c-D
4- Aşağıdakilerden hangisi üç fazlı asenkron motorun parçalarından değildir?A. Stator B. Rotor c. KapaklarD. Endüvi
5- Aşağıdakilerden hangisi Gölge kutuplu motorların kullanım alanlarından değildir?A. Aspiratörlerde B. Vantilatörlerde c. BuzdolabındaD. Reklam tesislerinde





























