Embed Size (px)
DESCRIPTION
Bakalářská práce - Alternativní pohony vozidel
Citation preview

ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ
V PRAZE
FAKULTA DOPRAVNÍ
BAKALÁ ŘSKÁ PRÁCE
ALTERNATIVNÍ POHONY VOZIDEL
2009 LUKÁŠ NOVOTNÝ

CESKE VYSOKE UCENi TECHNICKE
FAKlJLTA DOPRAVNI
Ustav: K616 Akademicky rok:.?9.9.~(~9.9.7......
, , , .., , , ZADAN'I BAKALARSKE PRACE
( PROJEKTU, UMELECKEHO DILA, UMELECKEHO VYKONU )
pro Lukase Novotneho
obor .1.>.<>. P.r.~Y.J:l.i. .s.y~ ~~ll:l.Y ..3. ..~~.c.J.1l1ik.:~ .
Nazev tematu: AI~~r..I1.~.ti.v.I1.i..p~J.1.()I1:Y'y()~i~~1
Zasady pro vypracovani:
1. Pfehled stavu techniky, zejmena vozidel s nekonvencnimi pohony 2. Analyza dynamiky vozidla s motory v kolech
. 3. MOZnosti fizeni trakce a smeroveho chovani 4. Predikce budouciho vyvoje

Rozsah grafickych praci: 10 stran
Rozsah pruvodni zpnivy: 40 - 50 stran
Seznam odborne literatury: y'lk.f::YY~r.ClI1¢.P\l~Jik'l.~e."'d' . d"""""""""" .
Kqy.a.I.1~'l.1.R.~?1? .S.()c,h.a.:. K()P.s.t!ll1<.c.~. a.\lt().l1:1qP.i.l.~.l ..¢..YYT...1.9..9..9. .
S. Uberti, D. Cambiaghi, V. Villa: Electric Traction Set for a .I.Agh~..G.Cl!?A.c,~'l.R()I~~c.~ic..a.I .. ~QQ~... . d.. dd .
Vedouci diplomove prace: ..............R~() f.. .IIlg..!a.IlI5:()y. <J.I1cla.,.c=.s..c, ..
Datum zadani diplomove prace: 12.2.2007
Datum odevzdani diplomove pnice: 15.2.2008
L.S.
~~ ... /L~~.~ .. / ...d.. d....d.. . ~i(i:"~.:J . Vedouci ustavu Dekan
V Praze dne 12.2.2007 .. .... ... . .................... .

- 1 -
Poděkování
Rád bych tímto poděkoval všem, kteří mi byli po celou dobu studia a při zpracování
diplomové práce nápomocni, ať už radou, podklady či duševní podporou.
Zvláštní dík pak patří zejména mým rodičům, kteří mě po celou dobu mého studia
podporovali a vytvořili mi ideální studijní podmínky. Jejich důvěry, trpělivosti a pomoci si velmi
vážím. Děkuji také vedoucímu svého projektu a bakalářské práce Prof. Ing. Janu Kovandovi,
CSc. za odborné vedení a rady po celou dobu studia. Děkuji také všem ostatním členům
ústavu dopravní techniky K616 za cenné rady a pomoc při studiu i při psaní této práce.
V neposlední řadě pak patří mé poděkování mým přátelům a blízkým za morální
podporu a pochopení.
Prohlášení
Předkládám tímto k posouzení a obhajobě diplomovou práci, zpracovanou na závěr
studia na ČVUT v Praze, Fakultě dopravní.
Prohlašuji, že jsem diplomovou práci vypracoval samostatně a použil jsem pouze
podklady uvedené v přiloženém seznamu.
Nemám závažný důvod proti užití tohoto školního díla ve smyslu § 60 Zákona
č. 121/2000 Sb. o právu autorském, o právech souvisejících s právem autorským a o změně
některých zákonů (autorský zákon).
……………………………………… V Praze dne 28. srpna 2009
podpis

- 2 -
České vysoké u čení technické v Praze
Fakulta dopravní
Alternativní pohony vozidel – elektromotory
v nábojích kol
Bakalá řská práce
Srpen 2009
Lukáš Novotný
Abstrakt
Předmětem této bakalá řské práce na téma „Alternativní pohony vozidel –
elektromotory v nábojích kol“ je analýza problemat iky elektromobil ů z hlediska jízdní
dynamiky, možnosti řízení trakce a sm ěrového chování. Tato práce pojednává o
dopadech takovéhoto řešení nejen na posádku vozidla a řidiče, ale i na životní prost ředí
a automobilový pr ůmysl obecn ě. Jsou zde popsány jednotlivá konstruk ční řešení, jejich
hlavní výhody a nevýhody. Sou částí bakalá řské práce pak je i predikce budoucího
vývoje, možnosti využití nových technologií a p řehled sou časných nejnad ějnějších již
rozpracovaných koncept ů.

- 3 -
Czech Technical University in Prague
Faculty of Transportation Sciences
Alternative wheel drive – wheel hub
electromotor
Graduation theses
August 2009
Lukáš Novotný
Abstract
The object of the bachelor’s degree graduation „Alt ernative wheel drive – wheel hub
electromotor“ is complete analysis of electric cars especially with a view to riding
characteristics, traction and direction regulation. This study deal with impacts on driver
and crew, but also generally on environment and aut omobile industry. It try to find
design solution and main advantages and disadvantag es. A part of this work is also an
prediction of progression, future development and d isquisition about opportunity usage
brand-new technologies. In fine it discuss today’s under development promising design.

- 4 -
OBSAH:
1. ÚVOD............................................................................................................................ 6
2. KONCEPCE .....................................................................................................................11
2.1 POHON ........................................................................................................................15
2.1.1 Stejnosměrné elektromotory ................................................................................16
2.1.2 Střídavé elektromotory.........................................................................................17
2.2 ZÁSOBNÍKY ENERGIE.....................................................................................................17
2.2.1 Akumulátory.........................................................................................................18
2.2.2 Superkondezátory................................................................................................19
2.2.3 Setrvačník............................................................................................................20
2.3. KONCEPCE POHONU S ELEKTROMOTORY V KOLECH .......................................................22
3. ANALÝZA DYNAMIKY VOZIDLA S MOTORY V KOLECH...... .......................................25
3.1 PODÉLNÁ DYNAMIKA .....................................................................................................25
3.1.1 Jízdní odpory .......................................................................................................25
3.1.2 Brzdění ................................................................................................................26
3.2 SVISLÁ DYNAMIKA – VLIV NEODPRUŽENÝCH HMOT...........................................................27
3.3 SMĚROVÁ DYNAMIKA.....................................................................................................32
3.3.1 Řiditelnost............................................................................................................33
3.3.2 Naklápění ............................................................................................................34
3.4 MOŽNOSTI ELIMINACE NEODPRUŽENÝCH HMOT A SNÍŽENÍ JEJICH VLIVU NA VOZIDLO ..........34
4. KONSTRUKČNĚ - TECHNICKÉ ŘEŠENÍ........................................................................38
4.1 VAR.I KLASICKÝ ELEKTROMOTOR V NÁBOJI KOLA ...........................................................38
4.2 VAR. II ELEKTROMOTOR S VNĚJŠÍM ROTOREM V NÁBOJI KOLA ........................................39
4.3 VAR III. ELEKTROMOTOR V JEDNOM CELKU S OSTATNÍMI KOMPONENTY - ALL-IN ONE ........40
5. MOŽNOSTI ŘÍZENÍ TRAKCE A SMĚROVÉHO CHOVÁNÍ VOZIDLA............................. 41
5.1 AKTIVNÍ ŘÍZENÍ ZADNÍCH KOL, 4WS................................................................................42
5.2 AKTIVNÍ NATÁČENÍ VŠECH KOL PŘI POHYBU VE MĚSTĚ .....................................................44
5.3 POHON VŠECH KOL .......................................................................................................46
5.4 X-BY-WIRE ...................................................................................................................48
5.4.1 Drive-by-Wire.......................................................................................................49
5.4.2 Brake-by-Wire......................................................................................................49
5.4.3 Steer-by-Wire.......................................................................................................51
5.5 ELEKTRONICKÉ SYSTÉMY JÍZDNÍ STABILITY .....................................................................51

- 5 -
7. LEGISLATIVA, SPOLEHLIVOST, BEZPE ČNOST ..........................................................52
8. AKTUÁLNÍ PROJEKTY A PREDIKCE BUDOUCÍHO VÝVOJE ... ...................................54
8.1 MITSUBISHI MIEV.........................................................................................................54
8.2 SIEMENS ECORNER ......................................................................................................55
8.3 MICHELIN ACTIVE WHEEL..............................................................................................56
8.4 VOLVO C30 RECHARGE................................................................................................58
8.5 LIGHTNING GT..............................................................................................................59
9. ZÁVĚR.............................................................................................................................60
10. SEZNAM POUŽITÉ LITERATURY ...................... ..........................................................62
11. SEZNAM PŘÍLOH..........................................................................................................62
SEZNAM POUŽITÝCH ZKRATEK:
4WS four wheel steering řízení všech čtyř kol
ABS anti-lock brake system protiblokovací brzdov ý systém
ASR anti-skid regulation systém regulace proklu zu
CNG compressed natural gas stla čený zemní plyn
EBD electronic brake distribution elektro. rozd ělování brzdných sil
ESP electronic stability program elektro. stabil izační systém
EWB electronic wedge brake elektro. klínová brzd a
Li-on lithium-ion batteries lithiové baterie
Li-pol lithium polymer batteries lithiovo-polyme rová baterie
LPG liquefied petroleum gas zkapaln ěný propan-butan
PZEV partly zero emission vehicle částečně bezemisní vozidlo
ZEBRA zero emission battery bezemisní baterie
ZEV zero emission vehicle bezemisní vozidlo

- 6 -
1. Úvod
Na počátku 21. století můžeme konstatovat, že nutnost vývoje ekologických
technologií umožňujících výrobu energie co nejšetrněji k životnímu prostředí enormně stoupá
s rozvíjením průmyslu po celém světě. Tento trend lze pozorovat i v oboru dopravy, která se
na celkových světových emisích podílí nezanedbatelnými dvanácti procenty a např. v Evropě
spotřebují dopravní prostředky jednu čtvrtinu celkové spotřeby energie. A přitom produkty
spalování z konvenčních motorů nejen silničních dopravních prostředků neovlivňují životní
prostředí jen místně. Účinek jejich provozu široce přesahuje okolí svého zdroje a má
nesporný globální význam. Ničení lesů, okyselování půdy a vody, negativní vliv na zdraví,
množení řas a v neposlední řadě i globální oteplování skleníkovým efektem jsou toho
nejlepším důkazem. Velkým problémem do budoucnosti jsou nepochybně i omezené zdroje
fosilních paliv, které se stávají nástrojem mezinárodní politiky a spolu s rostoucí poptávkou
po energii, a stoupajícím trendem počtu obyvatel, zvyšují ceny na světových trzích (v roce
1996 20$ za barel, v roce 2008 téměř 150$ za barel. Stejně tak stoupá spotřeba: 71mil.
barelů denně v roce 1994 a 86mil. barelů v roce 2008).
Celosvětový počet vozidel se dnes blíží k jedné miliardě a prognózy předpovídají na
dalších třicet let růst až na 1,6 mld. Velký potenciál růstu mají především nové, rychle se
rozvíjející ekonomiky Asie (Čína, Indie), kde se čeká spolu s rostoucím bohatstvím obyvatel
a jejich většímu přístupu k modernímu životnímu stylu obrovská poptávka po moderních
dopravních prostředcích. Zvlášť pokud jejich cena bude klesat a produkce tak bude
nabídnuta ještě většímu počtu zákazníků. Přesným příkladem ze současnosti je levný a
jednoduchý automobil Tata indické společnosti Tatamobil. Poptávka po takovémto vozidle je
obrovská. Bohužel však technologie těchto nově nabízených vozidel, spolu s faktem, že
rozvíjející se ekonomiky se stávají „vrakovištěm“ technologicky rozvinutých států světa, jsou
ve srovnání se současnými značně zastaralé. Tento často opomíjený faktor pak ještě nadále
zvyšuje již tak obrovskou spotřebu fosilních paliv k dopravě. K dosažení i jen konstantní
roční spotřeby energie v dopravě (za předpokladu růstu vozidel) by musela roční spotřeba
energie na vozidlo klesnout o 40%. Je jen otázka, zda lze tohoto dosáhnout snížením
ročního kilometrového výkonu, nebo uspořit energii potřebnou pro pohon vozidla.
Konstruktéři po celém světě proto vyvíjejí snahu o rychlý, efektivní (i efektivní co se
týče designu) a pohodlný dopravní prostředek (individuální i hromadné dopravy) s co
nejmenší spotřebou energie a nízkými hodnotami emisí. Tyto požadavky mohou být na první
pohled v rozporu. Posun v celospolečenském názoru na ekologii životní prostředí si však již
všimli marketingoví specialisté všech významných světových automobilek a konstrukčních

- 7 -
kanceláří. Stále více peněz je proto vynakládáno na vývoj takových technologií, které co
nejméně zatěžují své okolí z lokálního (hluk, oxidy dusíku, uhlovodíky, saze atd.) i globálního
hlediska (převážně emise CO2 a ostatních skleníkových plynů), a zároveň potřebují ke
svému provozu co nejméně energie. Ekologie a ohleduplnost k životnímu prostředí se stává
módní záležitostí, což v konečném důsledku spolu s zatím nesmělou podporou alternativních
technologií politickými rozhodnutími, žene vývoj rychle kupředu. Nemalou úlohu zde hraje
trend zavádění alternativních paliv a pohonů, kde cesta v horizontu delším než 20 let zdá se,
nahrává elektromotorům.
Zatímco v 90. letech před rokem 1996 byly ve světě představeny jen tři
provozuschopné studie osobních automobilů s alternativními pohony (hybridní, palivové
články, baterie), do roku 2000 jich přibylo 28 a do roku 2009 jich známe dohromady již
stovky. V oblasti autobusů je trend velmi podobný – tam je společenská poptávka vzhledem
k provozu ve městě ještě o to větší. Dalším ukazatelem je rozhodně stoupající počet
čerpacích stanic na vodík a dobíjecích stanovišť pro elektromobily (v dubnu 2007 byla
otevřena i první dobíjecí stanice pro elektromobily v ČR – Desná v severních Čechách) a
prodejnost elektromobilů resp. hybridních vozidel (v roce 2001 se v USA prodalo přes 10 000
hybridních vozidel, zatímco v roce 2006 jich bylo již přes 260 000 a křivka prodejnosti velmi
prudce stoupá). Podle studie [35] z roku 2007 by v roce 2010 mělo na světě být 1,6mil.
vozidel s hybridním pohonem, v roce 2015 4,3mil. a dvojnásobek tohoto počtu v roce 2020.
Finanční společnost JP Morgan pak předpovídá, že v roce 2020 se bude ročně prodávat
11,28mil hybridů a elektromobilů. To by mělo představovat již slušných 13%z celosvětových
prodejů. V USA pak má být až pětina automobilů hybridní pohon a další významná část by
měla tvořit čisté elektromobily. Je otázkou zda tyto prognózy budou odpovídat realitě
vzhledem k značně pokřivenému trhu s automobily celosvětovou finanční a hospodářskou
krizí. A automobilový průmysl je jednou z nejvíce zasaženou oblastí průmyslu. Možná se
proto dočkáme téměř skokového pokroku v zavádění sofistikovaných technologií pohonu
dopravních prostředků. Například automobilka Toyota musela kvůli stále stoupající poptávce
navýšit výrobu nového modelu Prius až na plánovaných 400tis ročně (oproti předchozímu
plánu 300tis. vozidel za rok). Napovídají tomu i zrychlené investice do automobilů zítřka a
globální uzavírané aliance mezi automobilkami jako podpora rychlejšího vývoje. (např.
Peugot – Mitsubishi, VW-BYD nebo Renault-Nissan). Nezanedbatelnou záležitostí jsou také
státní dotace na podporu high-tech průmyslu či přímo zákazníkům na nákup ekologicky
šetrného a provozně výhodného dopravního prostředku. Velmi podstatnou skutečností pak
je, pak stoupající poptávka a výroba vozidel nové generace, a drasticky se snižující výrobní
ceny a vůbec ceny za technologie. Celková snížená cena výrobků pak samozřejmě povede
k dalšímu podstatnému nárůstu podílu elektrických vozidel na trhu. Všechny výše uvedené

- 8 -
faktory pak přispívají v současné době k obrovským investicím a rozvoji v uvedené oblasti.
Ono také jiné cesty ani není. Zdá se tak, že žijeme zrovna v revoluční době a svět
automobilismu už nikdy nebude jako dříve.
Hezkým příkladem může posloužit srovnání dvou čistě elektrických vozidel. Zatímco
v roce 1993 vozidlo Golf City Stromer s výkonem 25kW a točivým momentem 75Nm vážilo i
s baterií 1514kg a jeho energetická hustota byla jen 22Wh/kg, v roce 2003 již bylo postaveno
vozidlo s výkonem 85kW, točivým momentem 200Nm, hmotností 1125kg a energetickou
hustotou 200Wh/kg. Výkonová hmotnost tohoto vozidla je 400W/kg. A dnes je vývoj ještě
dál. Mitsubishi představilo svůj projekt MiEV (Mitsubishi In-wheel motor Electric Vehicle), ve
kterém nejdříve přestavil několik již existujících vozidel na testovací (Mitsubishi Colt EV a
Lancer EV), na kterých si ověřil teoretické předpoklady elektrického pohonu a poté představil
městský vůz iMiEV. Ten poté uvedl do výroby a v současné době lze toto vozidlo v japonsku
zakoupit. Na evropský trh se dostane v průběhu listopadu 2009. Zmíněný vůz Colt EV
pohánějí dva synchronní elektromotory v zadních kolech o výkonu 47kW a točivém momentu
600Nm při hmotnosti 1150kg. V roce 2011 pak na trh má přijít i sportovní verze daného
automobilu s jinou karoserií a výkonovými parametry 60kW a hmotností jen 940kg. Velmi
nadějným a pozoruhodným vozem právě uvedeným do provozu je pak i Pininfarina B0 („B
zero“) přejmenovaný na BlueCar. Pokud odhlédneme od fascinujícího designu, jedná se o
městský dopravní prostředek na vysoké technologické úrovni. Skrytou zbraní toho malého-
velkého vozidla jsou například solární panely umístěné na střeše sloužící k obsluze
palubních přístrojů ale hlavně Li-on baterie a superkondenzátory zapojené do pohonu
vozidla. To jsou technologie, ještě před pár lety pro použití v dopravních prostředcích
nemyslitelné. Je pozoruhodné, že se snahy konstruktérů nezaměřují na městské automobily,
jak by na první pohled logika napovídala. Jako extrémní důkaz snahy vývojářů přesvědčit
odbornou veřejnost o atraktivitě elektromobilů lze uvést vozidlo Tesla roadster, který
se pomocí třífázového 185kW motoru pohánějící přes dvoustupňovou převodovku zadní
kola, může pochlubit fascinujícími dynamickými parametry. O hybridní modely již usilují tak
tradiční značky jako Ferrari, Lamborghini či britský Aston Martin. Věc donedávna
nemyslitelná. Jako fascinující se jeví i vyvíjející se technologie na bezdrátové dobíjení.
Jednotlivé útržkovité informace od společnosti Nissan sice naznačují jistý pokrok, ale
střízlivým pohledem je to ještě stále hudba budoucnosti. O to však více lákavá. Je jen otázka
trhu a času, která z uvedených koncepcí se výrazněji prosadí. Možná to bude kombinace
všech.
Uvedená fakta názorně dokládají rychlý vývoj v této oblasti, ale hlavně změnu ve
filozofii myšlení současných a hlavně budoucích zákazníků. Státní pobídky, dotace nebo

- 9 -
investice do výzkumu a vzdělání jsou jen jednou stranou mince. Tou druhou a podstatnější
stranou jsou kupci, pro které se stávají koncepty šetrných a ohleduplných dopravních
prostředků životním stylem. Velké státní objednávky na nákup vozidel pro městskou ale i
dálkovou hromadnou dopravu osob, policii nebo jako administrativní vozidla však může
bezesporu trh s elektrickými dopravními prostředky rychle rozhýbat a nastartovat. A díky
tomu světlo světa spatřují projekty stále více splňující velmi vysoké nároky zákazníků (na
pohodlí, image nebo výkon). V blízké budoucnosti se tak dočkáme automobilů
překonávajících ty současné – konvenční nejen ekologií jízdy a finanční šetrností, ale i
v nárocích prostorových, výkonnostních a designových. Nových konceptů a dokonce již do
provozu uvedených modelů jsou v současné době na světě stovky od nejrůznějších
renomovaných i neznámých firem. V podstatě každá významná společnost působící v
automobilovém nebo obecně v dopravním průmyslu, dnes vyvíjí, hnána vidinou nových trhů
a zisků, nějaké nové technologie označované dnes za zelené. Není však tématem této
práce nějak obšírněji zmapovat současnou situaci na trhu. Přesto si však v závěrečné
kapitole dovolím některé nejzajímavější popsat a předikovat možný vývoj.
Velkým deficitem do budoucna, alespoň z hlediska městských elektromobilů (které
jsou koncipovány na relativně krátký dojezd), je potřebná infrastruktura. Ať už jsou to dobíjecí
stanice pro elektromobily nebo plug-in hybridy nebo vodíkové čerpací stanice, ale i
specializované opravny na tento typ vozidel, nebo například servisy umožňující výměnu
baterií apod. Je nutno podotknout, že situace v této oblasti se každým měsícem velmi rychle
mění, zlepšuje. Ve Velké Británii se tak již vážně uvažuje nejen o přímé podpoře nákupu
těchto vozidel (známé jako „šrotovné“), ale i o výstavbě dobíjecích stanic napojených přímo
na obnovitelné zdroje energie (v případě Velké Británie tedy energie převážně z větrných
elektráren). Zajímavým elektrifikačním projektem na vybudování infrastruktury lze nalézt
například i v kanadském Ontariu, kde se na dané problematice podílí hlavně soukromý
sektor za podpory státu. Samostatným řešením je pak také baterie jen pronajímat a zákazník
by platil jen za ujeté kilometry (paušál jako např. u platby za telefon) nebo místo dobíjecích
stanic vybudovat síť stanic výměnných, kde by zákazník odevzdal baterii vybitou a nechal si
během pár minut namontovat novou.
Míra podpory alternativních pohonů a vůbec ekologické dopravy nejen ve městech se
v různých částech světa značně liší. Tak jako v rychle ekonomicky se rozvíjejících státech se
spíše očekává masivní nárůst automobilismu klasického typu (ale například i Čína se snaží
podporovat rozvoj nových technologií v dopravě), i mezi vyspělými státy euroatlantického
prostoru jsou dnes značné rozdíly způsobení například geografickou polohou. Míra
energetické spotřeby severských států Skandinávie v zimě je oproti státům blíže k rovníku

- 10 -
neporovnatelná, tudíž jejich motivace k celkovému snížení spotřeby energie je jistě vyšší než
jinde. Přesto však záleží spíše na vládnoucím „govermentu“ v dané lokalitě. Španělsko
například už nedávno přišlo se zprávou, že chce mít na silnicích 1 milion elektromobilů do
roku 2014. Madridská radnice nyní tento plán pomalu ale jistě začíná plnit. Na městských
parkovištích začne s instalací dobíjecích stanic pro elektromobily. Majitelé elektrických vozů
si je tam budou moct dobíjet zcela zdarma. Navíc každé nově postavené parkoviště bude
vybaveno dobíječkou, plus se tato infrastruktura objeví i na dalších veřejných místech.
Radnice se zároveň brzy chystá uzavřít smlouvu s Ministerstvem průmyslu o propagaci
elektromobilismu .[24]
I v České republice lze v současné době sledovat některé zajímavě se vyvíjející
projekty. Za všechny mohu jmenovat například plán energetické společnosti ČEZ na podporu
vývoje elektromobilů. Samozřejmě, že za tímto návrhem nestojí nějaká solidární snaha
změnit automobilový průmysl, nebo podpořit vývoj ekologických technologií. Nejen pro český
ČEZ, ale i pro všechny energetické společnosti na světě jsou budoucí vozidla dobíjené
z veřejné sítě dalším zdrojem příjmů a zvětšuje jim jejich portfolio zákazníků. Nicméně i tato
racionální úvaha tržního prostředí samozřejmě vede k cíli. A to možná efektivněji, než
nějakými nařízeními, omezeními nebo podporou vybraného odvětví nějakými státními nebo
nadnárodními administrativními nástroji.
Podle generálního ředitele společnosti ČEZ Martina Romana je rozvoj elektromobilů
zajímavý ze dvou důvodů: elektrická auta jsou šetrná k životnímu prostředí a projekt je
"ekonomicky smysluplný". Noční nabíjení elektromobilů totiž přispěje k vyrovnání distribuční
sítě a bude částečně řešit problém skladování elektřiny. Podle Martina Cmírala z firmy ČEZ
budou například moci zákazníci čerpat levnější noční elektřinu uskladněnou v autě na jiné
potřeby, pokud automobil nebudou potřebovat.
Cílem pilotních projektů v Praze a Ostravě je podle Romana příprava infrastruktury nezbytné
k masivnímu rozšíření elektromobilů. Cmíral odhaduje, že pokud bude v České republice v
provozu jeden milion automobilů poháněných elektřinou, které ujedou průměrně 200.000 km
za rok, zvýší se spotřeba elektřiny přibližně o 13 TWh. [25]
Je evidentní, že žijeme v prudce se rozvíjející době na poli elektromobilismu, ale i
alternativních energií a technologií obecně. V následujících letech můžeme očekávat
opravdovou revoluci v dopravě a obzvláště v individuální přepravě osob – převážně tedy
v automobilovém průmyslu.

- 11 -
2. Koncepce
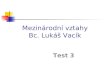
Z hlediska koncepce alternativních pohonů, lze rozdělit danou problematiku do
několika skupin (viz obrázek 1.1):
Obr. 1.1 Rozd ělení alternativních pohon ů a jejich paliv
Základní koncepci alternativních pohonů lze rozdělit na tři, více či méně oddělené
skupiny. První skupinou jsou pohony využívající stávajících, nebo mírně upravených
spalovacích pístových motorů. Druhem kapalného nebo plynného paliva pak může být
obnovitelný zdroj biomasy, nebo z fosilních zdrojů chemicky upravené suroviny jako zemní
plyn (CNG – Compressed Natural Gas) nebo zkapalněný ropný plyn (LPG – Liquefied
Petroleum Gas). Velký rozvoj použití zejména ve Skandinávii a zemích Jižní Ameriky zažívá
Ethanol, vyrobený synteticky nebo alkoholovým kvašením z biomasy. Jeho nevýhodou jsou
však silné korozní vlastnosti (proto musí být palivová soustava vozidla vhodně upravena) a
dnes také jisté morální nedostatky využívání biomasy vyrobené z rostlin, sloužících primárně
k produkci potravin. Velkým příslibem do budoucna je získávání energie z palivových článků.
Existuje mnoho rozličných způsobů elektrolytických reakcí, přesnější a podrobnější popis
však přesahuje rámec této práce. Z uvedeného grafu jednoznačně vyplývá, že budoucnost
patří elektromotorům. Výjimku tvoří velmi nekonvenční pohony na stlačený vzduch, parní

- 12 -
motor či rekuperační setrvačník. Tyto koncepce zřejmě také najdou své místo např. v
hromadné dopravě, ale jejich podíl na světovém trhu zcela jistě nepřekročí řád jednotek
procent.
Výhody elektromotorů jsou nesporné a jejich použití bude nadále rapidně stoupat.
Vzhledem k energetickému výrobnímu řetězci ve spotřebě primární energie však u koncepce
dobíjení akumulátorů z veřejné sítě či na stanicích, k tomuto účelů vytvořených, nelze ve
srovnání s moderním vznětovým motorem při podrobnějším pohledu na věc nalézt nějaké
zásadní výhody. Vzhledem k vysoké účinnosti elektromotoru, je nutno zohlednit účinnost
celého externě bateriově dobíjeného vozidla. Moderní atomové elektrárny mají účinnost asi
50%, elektrárny na uhlí asi 40%, do zástrčky by tedy se všemi ztrátami ve veřejné síti, měla
být dodávána elektrická energie s účinností asi 35%. Celé elektrické vozidlo od motoru na
kola by mohlo mít účinnost asi 25%. [2] Tato hodnota se už rapidně přibližuje schopnostem
současných spalovacích motorů. Nízká hlučnost a nulové lokální emise však přesto mohou
přilákat určité množství zákazníků. Musíme do budoucna také počítat se zvýšením účinnosti
primárních zdrojů elektrické energie i veřejné rozvodné sítě. Další možností je pak napojit
napájecí stanice přímo na ekologické zdroje energie. Vzhledem k vývoji směrem k nabíjení
elektromobilů i přímo ze zásuvky u uživatele doma či v práci, však tento argument selhává. I
přes řadu dílčích současných nevýhod, jako nízký dojezd, dlouhá doba nabíjení a velmi
nedostatečná infrastruktura se elektromotor po více než sto letech opět vrací na výsluní
nejrozšířenější technologie pro světový automobilismus. Elektromotor totiž také dokáže při
brzdění měnit kinetickou energii v elektrickou a po uložení do baterie či kondensátoru ve
formě energie chemické opět v případě potřeby použít. Jsou téměř bezhlučné, nepotřebují
chlazení a ke stání nespotřebovávají žádnou energii. Vysoká účinnost v širokém intervalu
otáček je nespornou výhodou oproti ostatním druhům pohonu (v případě
nejsofistikovanějších technologii v tomto motoru je účinnost některých moderních
elektromotorů i přes 90%, což je oproti maximálně 30% účinnosti toho nejsofistikovanějšího
spalovacího pístového motoru ohromující). Je to proto velmi úsporná a v co největší míře
bezztrátová možnost, jak nakládat s energií.
Spalovací motor sice účinností elektromotoru nemůže konkurovat, nicméně
energetická hustota paliva je mnohonásobně vyšší než u baterie. 60l nafty (tj. běžný objem
nádrže silničního vozidla) má hmotnost asi 50kg a odpovídá 500kWh energie. Pokud
bychom chtěli shromáždit stejnou energii do olověného akumulátoru, museli bychom zvýšit
400x hmotnost. To znamená, že při průměrné hmotnosti olověného startovacího
akumulátoru, by fiktivní baterie vážila těžko uvěřitelných 20t. Situace se samozřejmě obrací
s nástupem nových baterií např. typu Li-on. Například jihokorejská společnost Nanoexa

- 13 -
uvedla na trh Li-on baterie s hustotu energie 3kW/kg. To znamená, že vozidlo o hmotnosti
100 kg může být osazeno motorem o jmenovitém výkonu 300kW a plně se využije výhod
elektropohonu.
Elektromotor se dá, narozdíl od motoru na spalovacího opakovaně, a i více než 3x
přetížit. To jsou opravdu nesporné výhody. Spalovací motor však ještě, zdá se, neřekl své
poslední slovo. Například šéf americké pobočky VW prohlásil, že jen dotažením
rozpracovaných technologií jako jsou STOP&START, vypínání nepotřebných válců během
klidné jízdy nebo použití výrazně odlehčených materiálů, lze dosáhnout až 50% snížení
spotřeby paliva. Nicméně na druhou stranu spalovací motor i přes všechen vývoj nemůže
plnit do budoucna stále se zpřísňující legislativní nároky, kladené národními i globálními
institucemi. Samozřejmě jako nejvýhodnější se jeví spojit více technologií a využít jejich
předností. Možné řešení nabízí kombinace spalovací motor – elektromotor, neboli hybridní
technologie. A to alespoň do příchodu masového rozšíření palivových článků či dobíjení
z rozvodné sítě, které umožní kontinuální dobíjení baterií a tím i bezemisní provoz za všech
jízdních režimů.
Důležitým hlediskem posouzení výhodnosti elektromobilů je jejich ekonomika
provozu. Vzhledem k odlišnosti celé koncepce elektrických vozidel musíme při posouzení
využít trochu jiná kritéria než u běžných vozidel se spalovacím motorem. Energii automobilu
dodává elektřina, tudíž se při provozu elektromobilu bude vycházet z ceny energie 1kWh. Ta
je samozřejmě ještě závislá na druhu tarifu. Ve vysokém tarifu je cena jedné kWh asi 4,50kč,
v nízkém tarifu (např. noc) je cen a zhruba 1,50kč/kWh. Nicméně elektřina tvoří pouze 1/5 až
1/9 (v případě olověných baterií a odběru elektřiny v nízkém tarifu), druhou a mnohem
nákladnější položkou elektromobilu jsou baterie, které mají omezenou životnost (počet
nabíjecích cyklů), různou kapacitu i cenu. Ve skutečnosti je to právě baterie, která je palivem
pro vozidlo. [3] Ekonomické srovnání bateriově poháněného elektromobilu s běžným
vozidlem se spalovacím motorem přináší tabulka 1.1

- 14 -
Tabulka 16
Ekonomické posouzení elektrického pohonu na baterii
Baterie nové generace olova na bázi uhlíkového kolektoru
Cena baterie 4,24 Kč/Wh
Velikost bateriového paku 14,4 kWh
Dojezd 137 km
Počet cyklů při 80 % DOD (stav vybití) 700
Typická spotřeba elektromobilu 0,1 – 0,23 kWh/km
spotřeba 0,1 kWh/km 700 x 11520 Wh / 100 Wh/km = 80640 km Celková ujetá vzdálenost s jednou baterií spotřeba 0,23 kWh/km 700 x 11520 Wh / 230 Wh/km = 35061 km
spotřeba 0,1 kWh/km 4,24 x 14400 / 80640 = 0,76 Kč/km Cena baterie na 1km
spotřeba 0,23 kWh/km 4,24 x 14400 / 35061 = 1,74 Kč/km
nízké pásmo 1,50 Kč Cena elektřiny za 1 kWh (nízké pásmo) vysoké pásmo 4,50 Kč
nízké pásmo+ spotřeba 0,1 kWh/km
0,91 Kč/km
nízké pásmo+ spotřeba 0,23 kWh/km
2,09 Kč/km
vysoké pásmo+ spotřeba 0,1 kWh/km
1,21 Kč/km
erační provozní náklady (baterie+proud)
vysoké pásmo+ spotřeba 0,23 kWh/km
2,78 Kč/km
Náklady na provoz benzínového motoru (spotřeba 8l/100km)
2,46 Kč/km
Tabulka 1.1 Ekonomické posouzení elektrického pohonu na baterii ( tabulka p řevzata z [3] )
Rozličné aplikace ať už v prostředcích městské hromadné dopravy nebo
v individuální automobilové dopravě můžeme najít již dnes. Města jsou hlučná (okolí hlavních
komunikací často nesplňuje hygienické normy), přetížená emisemi a smogem a v neposlední
řadě stoupají náklady na provoz. Proto poptávka po tichých, bezemisních (např. kalifornský
program ZEV – Zero Emission Vehicle a PZEC - Partly Zero Emission Vehicle jistého
úspěchu dosáhl) a ekonomicky výhodných vozidlech stále stoupá. Jisté pobídky poptávky
vyspělé země dosahují ekologickými daněmi a zvýhodněním provozu těchto vozidel. Šance
vozidel poháněných elektromotorem u koncových zákazníků jsou však hlavně určeny jejich
provozními parametry.
Dojezd je v dnešní mobilní době velmi důležitým kritériem. Podle některých pramenů
80% řidičů neujede více jak 60km denně, což je hluboko pod hranicí schopností dnešních i
připravovaných elektromobilů a ostatních elektromotorových vozidel. Také hustší síť
dobíjecích stanic či stanovišť pro čerpání paliva pro články by mohla do budoucna překonat
nedůvěru potencionálních zákazníků. Je nepochybné, že vývoj půjde nejdříve přes menší
vozidla městského typu (u hybridních vozidel toto však neplatí, tam lze již dnes najít celou
řadu uplatnění napříč nabídkou) – zde jsou výhody nejzřetelnější a navíc vozidla nemusejí
splňovat stále vyšší výkonnostní nároky zákazníků. Vysoká hodnota zrychlení a maximální
rychlosti vozidla dnes patří mezi hlavní nástroje obchodní politiky výrobců. Ale ukazuje se, že

- 15 -
i tyto nároky vhodně dimenzovaná elektrická jednotka může splnit. Obzvláště ve spolupráci
se spalovacím motorem. Pak je vozidlo vhodné pro rychlé dálniční přesuny i občasný
městský provoz, za podmínek daných rozměry vozidla. Také prostředky hromadné dopravy
v oblastech intravilánu se stále více jeví jako výhodné pro využití elektromotorů. Režim jízdy
s častými rozjezdy, provoz relativně nízkými rychlostmi a časté brzdění jsou ideálními
předpoklady pro použití hybridní nebo čistě elektrické koncepce s možností rekuperace
energie do akumulátorů a superkondenzátorů. Právě rekuperace do vysoce kapacitních
baterií významně šetří provozní náklady a zefektivňuje provoz.
Jak uvádí spotřebitelská studie JD power: “The True success of the EV should be
based on its performance as a vehicle, not as an environmental solution.“ [38] (Opravdový
úspěch elektromobilů by měl být postaven na jízdních výkonech, ne na ochraně životního
prostředí).
2.1 Pohon
Mezi základní konvenční koncepci můžeme považovat elektromotor/y přeměňující
elektrickou energii na mechanickou a vhodný akumulátor sloužící k uskladnění elektrické
energie do chemické a následné zpětné využití pro pohon. Ostatně již v roce 1899 (1900)
slavný konstruktér Ferdinand Porsche za svých mladých let pochopil možnosti
elektromotorů. Vypracoval se svým pracovním kolegou Jakobem Lohnerem pojízdný
prototyp vozidla poháněného dvěma elektromotory umístěnými v předních kolech. Po
úspěchu Pařížské výstavy Expo pak sestavil po objednávce z Anglie produkční verzi.
Obr. 1.1 Lohner-porsche elektromobil - první elekt romobil s motory v kolech [15]
Ta se však značně lišila od prototypu. Měla elektromotory již ve všech čtyřech kolech
o výkonu 4 x 3kW a byla doplněna spalovacím motorem. Jednalo se tak o první vyrobené
hybridní vozidlo na světě s koncepcí podobné té co známe dnes. Po dodání zákazníkovi

- 16 -
však následovalo značné rozčarování, protože vozidlo bylo naprosto rozdílné, než to, které
se objednal zákazník. Vůz byl oproti současníkům značně neohrabaný a vážil díky
čtyřiačtyřiceti olověným bateriovým článkům těžko uvěřitelných 1800kg. Podobný koncept
využil ještě dříve i známý český konstruktér Ing. František Křižík, který pro svůj elektrický
kočár zvolil pohon dva elektromotory umístěné v nábojích předních kol. Na uvedených
příkladech lze vidět, že koncepce, kterou se zabývá tato práce je, jak už to tak bývá, známá
značnou dobu od začátků automobilismu jako takového.
Obr. 1.2 Lohner-Porsche elektromobil – Hybrid 1901 [15]
V současné době se vývoj nových typů elektromotorů opět dostává na přední místa
vývojových center. Parametry, které by měly splňovat i ty nově vyvinuté lze shrnout takto:
Elektromotory pro vozidla musí být spolehlivé a ve velkém rozsahu otáček musí mít
k dispozici dostatečný výkon. Důležitá je kompaktní stavba, vysoká účinnost při malé
hmotnosti, krátkodobá přetížitelnost, nízká hladina hluku, nízké udržovací náklady a výhodná
cena. Stejně tak trakční baterie pro elektrovozidla musí být bezúdržbové, s životností
nejméně 5 let, energetické hustoty alespoň 100Wh/kg a jejich cena musí být pod 150
Euro/Wh. [2] Nejzákladněji můžeme rozdělit elektromotory vhodné pro využití k pohonu
vozidel na motory stejnosměrné a střídavé.
2.1.1 Stejnosm ěrné elektromotory Magnetický tok je vybuzen vinutím ve statoru. Proud vinutí otáčejícího se rotoru je
přiveden přes kartáče a komutátor, který zajišťuje periodickou změnu proudu do cívky kotvy,
takže kotva rotuje ve vnějším magnetickém poli. Tento druh motorů vykazuje velmi výhodné
tahové charakteristiky a spolu s jednoduchou regulací otáček v širokém rozsahu a
kontinuálnímu přechodu z jízdy do brzdění jsou často využívané. Stejnosměrné motory jsou

- 17 -
krátkodobě až 100% přetížitelné. Hnací otáčky jsou však omezeny asi na 7000min-1 – je tedy
potřeba vícestupňové převodovky. Z pohledu zapojení rozeznáváme motory sériové a
paralelní.
2.1.2 Střídavé elektromotory U střídavých motorů odpadá vinutí kotvy a kolektor. Statorové vinutí je složeno
nejméně ze tří svazků, pootočených vzájemně o 120°, napájeno je t řífázový střídavým
proudem (proto je nutno přeměnit stejnosměrný proud z akumulátoru/baterie na střídavý).
Oproti stejnosměrným motorům jsou střídavé lehčí a menší (při stejném výkonu), jsou
jednodušší konstrukce, bezúdržbové a silně přetížitelné. Z uvedených důvodů jsou tyto
motory mimořádně vhodné pro použití v dopravě. Střídavé elektromotory se dále dělí na
synchronní a asynchronní podle toho zda se magnetické pole otáčí synchronně resp.
asynchronně se skutečnými otáčkami motoru.
Koncepce dvou naproti sobě řazených identických elektromotorů spojených
integrovaným planetovým převodem se běžně nazývá tandemový elektromotor. V dnešní
době je využita například u hybridního vozidla Toyota Prius. Jedna polovina je běžně použita
jako generátor rekuperující energii při brzdění, druhý spolu se spalovacím motorem
produkuje točivý moment a působí zároveň jako startér.
Na závěr k tomuto tématu lze poznamenat, že i v současné rychle se rozvíjející se
době na poli elektromobilů ještě není stanovena jedna technologie typu elektromotorů jako
primární. Tato značná roztříštěnost a neuspořádanost na trhu, ale i v technických normách,
pak vede k jisté nepřehlednosti v dané problematice. Legislativa, a to ať už národní nebo
např. evropská, tuto oblast v podstatě nepostihuje. To je zároveň i brzdou dalšího rozvoje.
Do budoucna však lze očekávat v této oblasti průlom a dominanci dvou, maximálně tří
koncepcí vnitřního uspořádání elektromotorů a tím i nastartování rychlejšího rozvoje.
V současné době, až na pár sporadických asijských výjimek, neexistuje jediný výrobce
specializovaný na výrobu elektromotorů vhodných pro zástavbu uvnitř kola. Donedávna byli
ještě prostorové, výkonové a hmotnostní nároky technickým oříškem. Nicméně se
současným prudkým nástupem nových koncepcí v automobilismu lze očekávat nějakou
razantní změnu ve stavu věcí.
2.2 Zásobníky energie
Jako zásobníky energie mohou vedle benzínového nebo naftového paliva v nádrži
sloužit především akumulátory, vysokovýkonné kondenzátory a setrvačníky. Rozhodnutí,

- 18 -
který z typů použít závisí především na dvou rozhodujících parametrech. Na energetické
hustotě [Wh/kg], tedy obsah energie na jednotku hmotnosti a výkonové hustotě [W/kg] tj.
odnímatelný elektrický výkon na jednotku hmotnosti určující konečné zrychlení a maximální
rychlost vozidla.
2.2.1 Akumulátory
Baterie s možností neomezeného a nepřetržitého dobíjení jsou jedním ze základních
komponentů všech vozidel, kde je potřeba ukládat energii, a kde jsou zároveň použity
elektromotory. Měli by umožňovat rychlé nabíjení, být bezúdržbové s životností alespoň 5 let
a jízdním výkonem více než 50 000km. Zároveň jejich energetická hustota by měla
dosahovat 200Wh/kg s hustotou výkonu asi 100W/kg. [2] Zároveň se od těchto součástí
požaduje co nejnižší cena, předpokládá se asi 150 Euro/kWh. V současnosti je na trhu
několik typů více či méně vhodných typů akumulátorů pro využití v oblastech pohonů
v dopravě. Nejrozšířenější druh jsou olov ěné akumulátory , používané především jako
startovací baterie, které svými parametry nejsou příliš vhodné pro budoucí použití v
pohonech. Limitem jsou hlavně nízká energetická i výkonová hustota a úzký rozsah
provozních teplot (-15 až +45°C). Nikl-Cadmium baterie umožňují vozidlu asi o 50% větší
dojezd než v případě olověných. Jejich masivnějšímu rozšíření brání však jedovatý těžký kov
Kadmium a fakt, že tyto akumulátory potřebují cyklické vybíjení a nabíjení. V moderních
vozidlech je převážně používána baterie Nikl-Metalhydrid . Její anoda je na bázi niklu,
katoda pak ze slitiny pohlcující vodík. Elektrolytem je zředěný roztok hydroxidu. Baterie
Lithium iontová (Li-on) je známá především z použití ve spotřební elektronice, nemají sice
paměťový efekt, ale jejich kapacita silně závisí na optimálním rozsahu teplot (5-30°C).
Příslibem do budoucnosti jsou baterie vysokoteplotní neboli vysokoenergetické . Ty
potřebují pracovní teplotu 250- 330°C. Jsou to nap říklad baterie sodík-síra a sodík-
niklchlorid. Právě druhá zmiňovaná je nazývána jako ZEBRA baterie (Zero-emission
battery). Katoda není pevná deska, ale tekutý sodík. Tyto baterie mohou vytvořit až třikrát
větší zásobu energie než běžné olověné baterie. Bohužel však zatím vykazují relativně
malou životnost. Je třeba na tomto místě konstatovat, že tzv. rekuperace může zvýšit dojezd
vozidla až o 50% při extrémních dopravních podmínkách, kde nedochází k úplnému
zastavení. Jinak se běžně dojezd zvyšuje o 10 až 15% v městském provozu a jen nepatrně
při jízdě na dálnici, s ohledem na její terén. [3] Přehled nejdůležitějších typů baterií a jejich
základních parametrů uvádí tabulka 1.2.

- 19 -
Typ baterie Hustota energie Výkonová hustota Životnost
Wh/kg W/kg cyklů let
Olovo 30-50 150-400 50-1000 3-5
Nikl-Cadmium 40-60 80-175 >2000 3-10
Nikl-Metalhydrid 60-80 200-200 500-1000 5-10
Sodík-Niklchlorid 85-100 155 800-100 5-10
Lithium-Ion 90-120 300 1000 5-10
Lithium-Polymer 150 300 1000 -
Zinek-vzduch 100-220 100 - -
Cílové hodnoty 80-200 75-200 600-1000 5-10
Tab. 1.2 Přehled parametr ů jednotlivých typ ů baterií [2]
Z hlediska nabíjení musejí baterie umožňovat pravidelné nabíjení z různých zdrojů a
různými rychlostmi. Elektromobily nejběžnější využívají nabíjení z elektrické sítě (v
domácnosti nebo na dobíjecích stanovištích), kam je elektřina dodávána z nejrůznějších
primárních zdrojů jako je uhlí, hydroelektřina nebo jaderná energetika. Taktéž může být
použit domácí zdroj energie, jako jsou střešní solární panely nebo větrná elektrárna, které
jsou mnohem výhodnější i vzhledem k bezemisní výrobě elektřiny. [3] Nabíjecí časy tak
primárně závisí na dostupné kapacitě elektrické sítě. V domácnostech v prostředí střední
Evropy je kapacita zásuvek přibližně 3kW, což odpovídá nabíjecímu času průměrné baterie
v řádu jednotek hodin. Tato hodnota samozřejmě nemůže konkurovat nabíjecím stanicím,
které by měly být schopny nabít baterii za řádově minuty tak, aby vozidlo z hlediska čerpání
energie bylo konkurence schopné oproti klasickým spalovacím motorům. Domácí nabíjení
tak může být při použití inteligentního plánovače nabíjení přitažlivé především pro využití
například levného nočního proudu. To by mohlo částečně při masovém použití řešit i
problém nevyužité kapacity elektrické sítě v nočních hodinách. Stejně tak připojené vozidlo
v domácnosti během jeho nevyužívání může poskytovat energie načerpanou během nočních
hodin (s levným tarifem) pro běžný denní provoz domácnosti. Nicméně problémem se zdá
být využití těchto sofistikovaných inteligentních systémů plánování nabíjení a spotřeby u
bytových jednotek ve městě.
2.2.2 Superkondezátory
Vysokoenergetické kondenzátory jsou určeny pro opakované použití. Základním
parametrem musí být vysoká životnost. Ta je výrobci udávána až k 106 cyklů. Dodávají další

- 20 -
potřenou energii během výkonových špiček při akceleraci. Energii uchovávají ve formě
elektrostatické energie. Tyto superkondenzátory dosahují kapacity až 104 F a velkou jejich
výhodou je, že během jednoho cyklu ztratí méně než 20% energie.
2.2.3 Setrvačník
Tento mechanický akumulátor energie je do budoucna velkým příslibem. Může
uchovávat energii aniž by potřeboval jakýkoli chemický proces. Jedná se o rotující těleso
deskového tvaru (kompozit, vysocelegovaná ocel titanem), jež je umístěno někde ve vozidle.
Množství uložené energie resp. zásobní kapacita závisí na otáčkách (i 20tis/min) a rozdělení
hmotnosti. Velkým problémem jsou zatím gyroskopické efekty vznikající při rotaci
setrvačníku uvnitř vozidla a jejich vliv na směrovou dynamiku vozidla při jízdě. Tento
nedostatek lze s úspěchem odstranit vhodnou polohou setrvačníku ve vozidle, nebo montáží
dvou protiběžných setrvačníků tak, aby se zmíněné negativní jevy navzájem eliminovaly.
Mechanický akumulátor se jeví jako obzvláště vhodný pro ukládání přebytečné energie
v prostředcích městské hromadné dopravy (autobusy, trolejbusy), ale i použití v osobních
vozidlech není nemožné. Zástavba přichází v úvahu přímo na klikovou hřídel, nebo přes
převody na hnací nápravu. Výhodou je možnost okamžitého uložení nebo odběru energie
bez jakékoliv prodlevy, vysoká životnost a šetrnost k životnímu prostředí (bez chemických
látek). Určitou nevýhodou je potřeba vysoce odolných a lehkých materiálů a náročných a
sofistikovaných strojních součástí (nízkoztrátová ložiska). Obrázek 1.3 porovnává jednotlivé
energetické hodnoty různých zásobníků energie.
Obr. 1.3 Porovnání energetických parametr ů jednotlivých druh ů zásobník ů energie

- 21 -
Tabulka 1.3 pak srovnává akční rádius jednotlivých zdrojů energie se stejnou
hmotností. Z uvedeného je pak zcela patrné, kterým směrem by měl směřovat budoucí vývoj
v dané problematice.
Prvotní nosi č energie Hmotnost Dojezd
kg km
Elektrická baterie 20 17
Benzín 20 340
Palivový článek H2 20 540
Palivový článek methanol 20 1020
Tab. 1.3 Srovnání dojezdu r ůzných nosi čů energie [38]
Z hlediska výběru vhodné baterie je třeba také rozlišovat do jak řazeného pohonu baterii
umístíme. Energetická potřeba v čase je jiná u hybridních motorů, kde část objemu práce
přebírá paralelně nebo sériově umístění spalovací motor (hlavně v případě, kdy je spalovací
motor využit jen k samotnému dobíjení akumulátorů) a jiná je u čistých elektromobilů.
Obr. 1.4 Prostor pro využití r ůzných typ ů baterií a superkondenzátor ů [12]
Jak uvádí obrázek 1.4, v případě hybridních vozidel požadujeme spíše větší výstupní výkon
resp. vyšší výkonovou hustotu baterie. Naopak u plně elektrických dopravních prostředků
upřednostňujeme spíše větší kapacitu (tedy dojezd) neboli vyšší energetickou hustotu.
Z obrázku je také patrné, že kondenzátory poskytují velmi vysoký výkon ale naopak nízkou

- 22 -
kapacitu v čase. Jejich rychlé nabití a vybití tak lze využít při potřebě náhlé akcelerace.
Nicméně je jasné, že budoucnost je přisuzována právě kombinaci li-on baterií a
superkondenzátory.
2.3. Koncepce pohonu s elektromotory v kolech
Prvotní otázkou konstrukce nového nekonvenčního vozidla je po rozhodnutí přesného
typu pohonu, jistě počet a rozmístění elektromotorů ve vozidle. Zapojení hnacích
komponentů poté určí výchozí parametry vozidla a jeho zřejmé nedostatky. Základní
konfiguraci můžeme navrhnout tak, jak je na obrázku 3.1. Elektromotor je řazen někde
v přední části vozidla, baterie s největší pravděpodobností v ose zadní nápravy. Modře je
naznačen přenos energie elektrickou cestou, červeně pak přímé mechanické spojení a
transfer točivého momentu přes diferenciál na obě přední hnací kola. Výhodou je relativní
konvenčnost. Není potřeba vyvíjet netradiční komponenty, celá konstrukce pohonného
ústrojí nápadně připomíná běžné automobily se spalovacím motorem. Elektromotor může být
neomezeného typu, ani použití vícestupňové převodovky by v tomto případě nebyl výrazný
problém. Toto pojetí tvoří základ pro všechny ostatní a vychází z ní i současná hybridní
vozidla (se sériovým i paralelním řazením dvojice elektromotor – spalovací motor).
V současné době je možno najít ve světě několik vozidel s touto koncepcí pohonu. Lze však
konstatovat, že do budoucna se vývoj bude orientovat směrem k některému z níže
uvedených příkladů. Konstrukční pojetí podle schématu na obrázku 3.2 představuje spojení
mezi prvním a posledním zde uvedeným konceptem. Baterie může být stále umístěna vzadu
před zadní nápravou. Centrální hnací elektromotor však nahradili dva menší. Tím odpadla i
potřeba nápravového diferenciálu. Rozdílnou dráhu hnacích kol lze snadno vyrovnávat
řízením rychlosti otáčení pravého respektive levého elektromotoru. Snadná regulace a
rozdělování točivého momentu mezi koly tak zajistí výborné trakční schopnosti za snížených
adhezních podmínek, zvýšení schopnosti rozjezdu v kopci a nepochybně jistější jízdní
vlastnosti při zatáčení.

- 23 -
Obr. 3.1 Obr. 3.2 Obr. 3.3
Třetí z možných způsobů pohonu vozidla charakterizuje schéma na obrázku 3.3.
Mechanický přenos točivého momentu byl minimalizován a k přenosu energie slouží jen
modře zbarvené elektrické vedení od baterie umístěné vhodně vzhledem k co nejlepšímu
rozložení hmotnosti ve vozidle. Elektromotory jsou instalovány do nábojů všech čtyř kol. To
sebou přináší řadu výhod. Jednoduchost konstrukce, snadná kontrola prokluzu a trakce
všech čtyř kol, rychlá a jednoduchá spolupráce se systémy jízdní stability, nebo zvětšený
prostor pro posádku vozidla jsou jen některé z nich. Odpadají také všechny, v konvenčním
vozidle značně rotací a ohybem namáhané, díly jako diferenciály (u pohonu 4x4 i tři), při
použití vhodných elektromotorů převodovka a ostatní točivým momentem namáhané části
(hřídele, kardanové klouby).
Ačkoliv je v současné době v případě konvenčního řazení pohonného ústrojí účinnost
klasické převodovky relativně vysoká (u nejlepších převodovek až 93%), je přesto v případě
jejího vynechání úspora zmařené energie nezanedbatelná. Účinnost jednotlivých
převodových komponentů je běžně uváděný parametr v katalozích výrobců převodovek a
ostatních komponent. Bývá udávána buď ve formě čísla, nebo jako soustava křivek, kde je
vynesena účinnost v závislosti na rychlosti, případně momentu. Proto je relativně snadné
zjistit, kolik energie je ztraceno. Pro ztráty v přenosu výkonu od hnacího členu (motoru) na
hnaný člen (zařízení) platí, že se všechny účinnosti převodů a ložisek kol násobí. Výsledná
ztráta může být velmi překvapivá, čísla okolo 85% nejsou vůbec vzácná, spíše běžná. [16].
Slabým článkem obzvláště u starších nebo často využívaných vozidel je samozřejmě

- 24 -
spojkové ústrojí, které trpí velkým opotřebením a ztrátou součinitele tření přítlačných
kotoučů. Pro celkový výpočet účinnosti platí následující vztah:
kde,
η je účinnost převodovky v procentech
P2, (P1) je výstupní (vstupní) výkon
M2, (M1) je výstupní (vstupní) moment
ω2, (ω1) jsou výstupní (vstupní) otáčky
Pokud lze vynecháním těchto komponentů a umístění pohonné jednotky
(elektromotoru) integrovat přímo do náboje kola ušetřit min. 10% energie, jeví se tato cesta
jako nanejvýš slibná. Samozřejmě je třeba počítat energetické ztráty způsobené přenosem
elektrické energie kabelovými svazky z akumulátorů do samotných elektromotorů, nicméně
tyto ztráty budou maximálně v řádu jednotek procent. I v případě započítání dalších ztrát ve
způsobu předávání energie samotným akumulátorem a přenosu mechanické energie na
ráfek kola dostáváme neúměrně úspornější systém, než jsou dnes klasicky koncipované.
Velkým příslibem do budoucna je také možnost integrovat několik dříve
neslučitelných systémů v jeden spolu s elektromotorem. Pohon, řízení, brzdy i systém
odpružení vozidla by mohl zastat jeden celek sloučený do kompaktních rozměrů v nábojích
kol.
Uvedené samozřejmě platí i pro hybridní způsob pohonu vozidel. Všechny tři
zmiňované koncepce se jeví jako vhodné pro instalaci spalovacího motoru. Ten by měl ve
vozidle působit jako generátor energie pro dobíjení baterie v případě vyčerpání standardních
způsobů nabíjení (rekuperace či jiné vnější dobíjení například solárními články). Elektromotor
odstraní nedostatek spalovacího motoru, který potřebuje jen k pokrytí vlastní potřeby chodu
asi 1kg/h paliva (bez vnějšího odvádění výkonu) a v městském provozu jeho účinnost klesá
až pod 10%. Za nízké rychlosti a přerušované jízdy v režimu častého brzdění, stání a
rozjíždění jsou všechna standardní opatření ke snížení spotřeby a exhalací (snížení valivého
odporu, součinitele odporu vzduchu, zvýšení účinnosti spalovacího motoru, snížení
hmotnosti atd.) marná. V případě režimů s takto malou účinností vystává otázka jak využít a
naložit se zbývajícími 90% energie, které se z velké části přemění v teplo a výfukovým

- 25 -
ústrojím spolu se zdraví škodlivými emisemi odchází do ovzduší. Elektromotor v kombinaci
s vhodným zásobníkem energie se pak nabízí jako alespoň částečné řešení.
3. Analýza dynamiky vozidla s motory v kolech
Pohon vozidla s elektromotory v kolech přináší, jak bylo již uvedeno v úvodu, řadu
výhod. Na obr. 1.5 je uvedeno základní schéma. V tomto oddíle podrobně rozeberu
jednotlivé dynamické aspekty pohybu vozidla se zabudovanými elektromotory v nábojích kol,
které se liší od konvenčních vozidel.
3.1 Podélná dynamika
Tato část zahrnuje dynamiku jízdy v podélném směru, tedy pohyb ve směru osy x
(pokud uvažujeme standardní třírozměrnou referenční soustavu). Výchozími parametry jsou
v tomto případě celková hmotnost vozidla a podélná poloha těžiště, výkonové parametry
pohonné jednotky a brzdového ústrojí, konstrukce podvozkových částí a druh pohonu (4x4).
3.1.1 Jízdní odpory
Elektromotory v nábojích kol nemají na jízdní odpory výrazný vliv. Valivý odpor a
odpor stoupání se teoreticky sníží s poklesem celkové hmotnosti vozidla. Ten lze však do
budoucnosti připsat spíše možnosti použití sofistikovanějších materiálů, než zástavbou dvou,
či čtyř elektromotorů oproti jednomu konvenčnímu spalovacímu. K elektrickým agregátům je
ještě potřeba připočíst podstatnou hmotnost použitého akumulátoru energie, elektrorozvodů,
palivových článků atd. Aerodynamický odpor vozidla lze však na druhou stranu díky menší
prostorové náročnosti elektromotorů s úspěchem vhodným návrhem karoserie snížit.
Limitem by v tomto případě nemusel být objemný motorový prostor v přední části vozidla
v případě použití spalovacího motoru. V důsledku tohoto opatření by mohlo dojít ke snížení
součinitele odporu vzduchu, obzvláště ve vysokých rychlostech, někam k hodnotám rapidně
šetřícím potřebnou energii k pohonu. To by v konečném důsledku snížilo celkové výkonové
nároky na soustavu pohonných jednotek. Ke snížení by došlo i v případě odporu zrychlení
a odporu t ření rotujících částí . V prvním případě v důsledku již zmiňované nižší hmotnosti
a absenci všech významných rotujících částí (převodovka, stálý převod, ozubená kola
diferenciálu). Na odporu zrychlení se proto bude podílet odpor zrychlení posuvných částí
vozidla a mnohem menší měrou odpor rotujících částí, ke kterému můžeme počítat jen odpor
rotujících kol, závisející na jejich momentu setrvačnosti a kvadrátu dynamického poloměru
kola, jak ukazuje vztah 3.1. K odporu tření lze započítat jen ztráty třením ve valivých
ložiscích v uložení kol a ztráty uvnitř samotných elektromotorů.

- 26 -
[1.1]
Celková jízdní dynamika bude proto odpovídat klasickému charakteru elektromobilů
s drobnými rozdíly oproti koncepci umístění elektromotoru do odpružené části vozidla. Lze
počítat s ušetřením hmotnosti převodového ústrojí, které v případě použití vhodného
nízkootáčkového střídavého motoru např. s permanentními magnety umožní, integrovat
elektromotory do kol. Z hlediska podélné jízdní dynamiky samozřejmě nelze zanedbat vliv
zástavby akumulátorů (cca 300kg) – tím se smazává absence spalovacího motoru, nicméně
dostatek točivého momentu, vyplývající z vlastní charakteristiky elektromotorů, a prakticky
konstantní výkon v celém spektru otáček, lze tento nedostatek z prakticko-uživatelského
hlediska jízdních výkonů v přímém směru zanedbat. Bezpřevodová jízdní charakteristika
naopak klasickým uživatelům obzvláště městských typů vozidel bude značně vyhovovat a
zcela jistě podstatně zvýší jejich spokojenost s vnímáním pohodlné jízdy.
3.1.2 Brzdění
Během brzdění nabývá zrychlení vozidla záporné hodnoty. Dochází ke zpomalování
hmoty celého vozidla díky brzdným momentům, které jsou rozdělovány na jednotlivá kola. Je
třeba konstatovat, že při zástavbě elektromotorů dojde k určitým změnám. Celkové
hmotnostní těžiště změní svoji polohu blíže k rovině vozovky. Podle schématu na obrázku
2.1 se sníží vertikální poloha těžiště h. Rovnice [3.2],[3.3] pak vyjadřují momentové
podmínky rovnováhy respektive největší přenositelné brzdné síly.
Obr. 2.1 Síly p ůsobící na vozidlo b ěhem brzd ění
ar
JMF
d
ks
+= ∑
2

- 27 -
h
lma
l
GlR z
p += ; h
lma
l
GlR p
z −= [3.2]
pvbp RF µ=(max) ; zvbz RF µ=(max) [3.3]
Jak je z uvedených rovnic patrno, vertikální poloha těžiště má na síly vznikající při
brzdění vliv. Reakce kol na vozovku jsou zatíženy statickou složkou, ke které musíme
přičíst/odečíst dynamické zatížení, vznikající posunem těžiště. To pak nepřímo úměrně
závisí na parametru h. Čím bude těžiště níže, tím menší bude dynamická složka přesunu
váhy a tím méně bude přední/zadní náprava zatěžována respektive odlehčována. Proto při
maximálních brzdných zpomaleních ( ga =& ) nedochází k takovým náklonům karoserie,
odlehčení, respektive zatížení kol i bez změny tuhosti pružení/tlumení a úpravy kinematiky
zavěšení. Stabilita vozidla se proto při brzdění v podélném směru zvýší. Regulace brzdných
sil by, vzhledem k dané koncepci, měla být jednoduší. Předpokládá se použití plně
elektronických brzdných systémů tak, že řídící jednotka bude vyhodnocovat jízdní podmínky,
aby nedocházelo k blokování jednotlivých kol a tím k nežádoucímu stáčení vozidla.
3.2 Svislá dynamika – vliv neodpružených hmot
Svislou dynamikou rozumíme všechny pohyby vozidla ve svislém směru například při
přejíždění nerovností na vozovce. Podle obrázku 2.2 můžeme jednoduše rozdělit vertikální
dynamiku na pohyby odpružené a neodpružené hmoty. V konvenčních vozidlech je hmotnost
odpérovaných hmot cca 5-8x větší než neodpérovaných. V případě zabudování pohonných
jednotek do nábojů kol však vzroste hmotnost neodpružených hmot m. To znamená pro jízdu
vozidla několik odlišností.

- 28 -
Obr. 2.2 dvouhmotový systém
[3.4]
M
C=Ω ; m
CC p+=ω
[3.5]
Rovnice [3.4] vyjadřují právě pohyb odpružených resp. neodpružených hmot při
zanedbání tlumení. Uvedená soustava má právě dva stupně volnosti (v našem případě lze
snadno zanedbat kmity spalovacího agregátu). Veličiny Ω a ω jsou vlastní úhlové frekvence
odpérované a neodpérované hmoty [3.5]. Dosazením a řešením této soustavy
diferenciálních rovnic jsou pak po jistých matematických úpravách dva kořeny vyjadřující
0)( =−+ κxCxM &&
)( ξ−+−− xCκ)C(xκm p&&

- 29 -
výsledný pohyb obou hmot [3.6]. Proto se pohyb uvedené soustavy skládá po počátečním
vybuzení ze dvou složek s vlastní frekvencí 1Ω a 2Ω
[3.6]
Z uvedeného plyne, že soustava má dvě rezonance, při níž amplitudy pohybu hmot
nekonečně rostou. Ta nastává vždy, pokud se budící frekvence přejížděné nerovnosti rovná
jedné z vlastní frekvence pohybu, tedy 1Ω resp. 2Ω . Úhlová frekvence nerovnosti (budící
frekvence) je závislá na rychlosti přejezdu nerovnosti a délce vlny nerovnosti (v případě čistě
teoretické harmonické nerovnosti, tedy při konstantní vlnové délce nerovnosti).
Celková charakteristika vozidla z hlediska svislé dynamiky se posuzuje podle dvou
navzájem se vylučujících měřítek. Z hlediska jízdního pohodlí je důležité vnímání a působení
vertikálního zrychlení na řidiče a posádku vozidla, z pohledu jízdní stability a vlastností
vozidla (tedy především z pohledu aktivní bezpečnosti) je nutné posuzovat dynamickou sílu
mezi kolem a vozovkou. U těžkých nákladních automobilů je pak neméně důležitým
aspektem svislé namáhání vozovky od projíždějících vozidel. Proto musí být celkové
nalaďění vozidla vždy jen kompromisem mezi pohodlím a bezpečností jízdy.
Podle vzorce [3.5] lze tohoto dosáhnout snížením tuhosti pneumatiky Cp (tzn. snížení tlaku
v pneumatice), snížením tuhosti odpružení vozidla, nebo zvětšením neodpružených hmot.
V případě zabudování elektromotorů do nábojů kol tak dochází k rapidnímu zvýšení
neodpružené hmoty v soustavě, ke zmenšení absolutních zrychlení odpružené hmoty, a tím
k zvýšení vnímaného pohodlí posádky vozidla. Zároveň však zvětšení neodpérovaných hmot
znamená z hlediska jízdní bezpečnosti nebezpečné odskakování pneumatiky od vozovky. To
lze chápat jako zhoršení adhezních schopností vozidla v případě přejezdu nerovností na
vozovce a snížení aktivní bezpečnosti.
Uvedené se proto nachází v rozporu se snahou konstruktérů o co nejmenší
neodpružené hmoty. Proto zvýšení neodpérovaných hmot vlivem zástavby pohonných
jednotek do nábojů kol lze chápat jako problém, který sice přináší jistý pozitivní vliv na
pohodlí, avšak za cenu výraznějšího zhoršení adhezních vlastností ve styku pneumatika –
21 sinsin Ω+Ω= BtAx
21 sinsin Ω+Ω= βακ t

- 30 -
vozovka. Podle typu velikosti a výkonu elektromotoru lze předpokládat, že hmotnost se bude
značně lišit. Přesto však je důležité používat co nejlehčí jednotky tak, aby poměr mezi
odpérovanými a neodpérovanými hmotami byl co nejvyšší ( > 5). Je jen otázkou vývoje, zda
se bude v těchto parametrech dosahovat stále lepších výsledků.
Doposud jsme uvažovali dvouhmotovou soustavu netlumenou. Ale jak uvádí obrázek
2.2, musí se do dynamického modelu zahrnout i tlumení. A to jak tlumení odpružené části
vozidla, tak i tlumení pneumatiky. Pro popis je nutno zavést tzv. součinitel aperiodicity
(poměrný útlum), který popisuje intenzitu tlumení jako poměr mezi součinitelem útlumu b
tlumiče k součiniteli útlumu, který by soustava musela mít, aby docházelo k aperiodickému
tlumení [3.7]. Zjednodušeně lze říci, že čím nižší je součinitel aperiodicity, tím horší jsou
adhezní vlastnosti vozidla (odskok kola od vozovky nastává již při nízké výšce nerovnosti) a
naopak příznivější jsou vlivy vnímající posádkou jako pohodlí. První ze vztahů uvádí
součinitel aperiodicity pro odpruženou hmotu, druhý pak pro neodpruženou v soustavě podle
obr. 2.2.
CM
bM
2=ψ ,
mCC
bb
p
pm
)(2 ++
=ψ [3.7]
Je jasné, že tlumení potlačuje rezonanci (při nízkých budících frekvencích) a obecnou
snahou je, aby vozidlo najíždělo na nerovnosti v rovnovážném stavu. Toho lze dosáhnout,
pokud je součinitel aperiodicity (obou hmot v uvedené soustavě) menší než 0,4. Je proto
třeba parametry vstupující do této problematiky vhodně nastavit tak, aby ve výsledku celá
soustava splňovala adhezní i bezpečnostní nároky kladené na vozidlo. Přítomnost tlumení
výrazně snižuje amplitudu pohybu v první rezonanční oblasti (budící frekvence se přibližně
rovná nižší frekvenci vlastních kmitů soustavy, neboli v = Ω1), ale v oblasti vyšší (v = Ω2) je
jeho vliv spíše negativní. Proto je charakteristika tlumiče navrhnuta jako lomená. Sklon křivky
(obr. 2.3) je pak nad zlomem ovlivněn především neodpruženou hmotou, tedy hmotností
zabudovaného elektrického agregátu. Zlom v charakteristice tlumiče, tzn. snížení periodicity
má jak již bylo uvedeno vliv na adhezní vlastnosti. Podle vztahu [3.7], lze proto při zachování
nižšího součinitele tlumení zachovat stejný součinitel aperiodicity snížením neodpružených
hmot tzn. snížením hmotnosti pohonné jednotky v nábojích kol.

- 31 -
Obrázek 2.3 Charakteristika tlumení xbFT &.=
Závěrem se dá říci, že vliv elektromotorů v nábojích kol na svislou dynamiku je
nezanedbatelný. Obecnou snahou by mělo být minimalizace jejich hmotností. To by
v důsledku znamenalo větší možnosti v nastavení podvozkových komponentů. Pokud by
však poměr odpružené a neodpružené hmoty byl znatelně nižší a adhezní (jízdní) vlastnosti
horší než je dnes běžný standard u silničních vozidel, je tu možnost podle vztahu [3.7] zvýšit
tuhost tlumičů za cenu zvýšení maximálních výchylek vertikálního zrychlení odpružené části
vozidla a snížení pohodlí jeho pasažérů. Základní otázkou by tak mělo být i využití vozidla.
Budící frekvence je lineárně závislá na rychlosti jízdy [3.8].
L
vv vπ2=
[3.8]
vv …rychlost jízdy vozidla
L …délka přejížděné nerovnosti
Tedy pro městská vozidla s nízkou maximální provozní rychlostí jsou zvýšené
neodpružené hmoty řešitelným problémem i bez snížení pohodlí osádky. Také relativně
robustní stavba nosných částí např. městského autobusu s výkonnými elektromotory
v kolech by nemusela z hlediska poměru odpružených a neodpružených hmot znamenat
výrazný nedostatek z hlediska pohodlí a bezpečnosti. Příslibem by mohlo být i aktivní
tlumení, pracující přesně podle aktuální situace a eliminující tak výše uvedené nedostatky.

- 32 -
Jestliže v případě konvenčního uspořádání pohonu se spalovacím motorem,
převodovým ústrojím a hnacími hřídeli je u osobního vozidla střední třídy o celkové
hmotnosti cca. 1300kg, je hmotnost samotného agregátu přibližně 350kg. Z celkové
hmotnosti se jedná o 27%. V případě absence se tedy těchto 27% hmotnosti v odpružené
části hmotového systému vozidla ušetří. Nicméně, je třeba počítat s nárůstem o hmotnost
nezbytných akumulátorů (cca 300kg) a rapidním nárůstem neodpružených hmot se všemi
jejími negativními důsledky na jízdní pohodlí a stabilitu popsanými výše. Umístění
akumulátorů bude sice, co se týče jízdní dynamiky, však na vhodnějším místě ve vozidle (co
nejníže a co neblíže středu vozidla) než spalovací motor. Nejnovější elektromotory, které
byly na fungujících konceptech odzkoušeny, však mají hmotnost jen lehce přesahující 7kg a
výkon přibližně 15kW. Na první pohled se zdá, že to už stojí za pozornost. Celková hmotnost
klasického zástupce malých městských vozidel Renault Clio s nejběžnějším malým motorem
je 950kg a neodpružené hmoty na přední nápravě jsou 38kg. Kdybychom tomuto
modelovému vozidlu přidaly dva elektromotory do každého kola k neodpruženým hmotám,
dělá to nárůst neodpružené hmoty o 36% na přední nápravě. Což je z hlediska jízdní
dynamiky i při tak nízké hmotnosti elektromotorů nezanedbatelné.
Můžeme tedy počítat, co se týče neodpružené hmotnosti, se spíše zhoršenými
vlastnostmi v případě použití zmíněné koncepce. Je jen otázka, nakolik se projeví (či spíše
zákazník dokáže ocenit) ty pozitivní, a nakolik například materiálové inženýrství do budoucna
dokáže zvrátit tento hmotnostně nepříznivý poměr ve prospěch integrování elektromotoru do
náboje kola. Jistou naději v tomto případě dávají pomalu se objevující se technologie
implementování tzv. all-in one. Neboli kromě brzdících elementů a pohonu, umístit do kola i
odpružení a tlumení vozidla tak, aby došlo k rapidní minimalizaci neodpružených hmot.
Tomuto tématu se věnuje kapitola 2.4
3.3 Směrová dynamika
Problematiku směrové dynamiky lze rozdělit do dvou kategorii. První můžeme chápat
jako řiditelnost. Při vyloučení ovládání vozidla řidičem hovoříme o tzv. objektivní řiditelnosti
neboli reakcemi vozidla na předem přesně definované řídící vstupy. Za druhou kategorii
směrové dynamiky jízdy vozidla můžeme považovat směrovou stabilitu, neboli dodržování
směru. Je to schopnost vozidla udržovat směr pohybu i při působení vnějších sil a momentů
(dynamicky se měnící odstředivá síla při průjezdu zatáčkou na povrchu se sníženou adhezí,
propružení a změna geometrie náprav při přejezdu nerovností, změny směru jízdy, ale i
aerodynamický odpor zvyšující se kvadraticky s rychlostí, nebo vliv bočního větru). Pro účel
vyšetření směrové dynamiky vozidla s pohonnými jednotkami v nábojích kol není nutné
uvažovat vlastnosti pneumatik.

- 33 -
3.3.1 Řiditelnost
Pojem řiditelnost můžeme rozdělit na řiditelnost statickou (určuje vlastnosti vozidla
jako odezvy na natáčení volantu při ustálené jízdě) a na řiditelnost dynamickou (závislost
mezi buzením na volantu a neustálenými dynamickými odezvami pohybu vozidla).
Řiditelnost vozidla je v podstatě odezva vozidla na natáčení volantu při stálé rychlosti jízdy.
Určitému natočení volantu odpovídá například určitá hodnota úhlové rychlosti kolem svislé
osy (tzv. stáčivá rychlost), která je odezvou vozidlového systému. [5] Pro teoretický popis
řiditelnosti vozidla s elektromotory v kolech vytvořme modelovou situaci. Vozidlo se pohybuje
po kruhové dráze, těžiště je umístěno v rovině vozovky a působí na něj odstředivá síla,
závislá přímo úměrně na čtverci rychlosti a celkové hmotnosti vozidla a nepřímo na poloměru
zakřivení, jak dokládá vztah [3.9].
R
vmF
2
= [3.9]
Vybočování vozidla z požadovaného směru určeného řídícím vstupem pak závisí na
veličinách α ,α& (úhel směrové úchylky těžiště resp. úhlová rychlost směrové úchylky těžiště)
a rychlost stáčení na ε ,ε& (úhel stáčení vozidla, resp. úhlová rychlost stáčení vozidla). Úhel
natočení přední/zadních kol pak označíme veličinou β. Z lineárního jednostopého modelu
vozidla pak můžeme konstatovat:
zz
z
pp
p
v
lv
l
βεαα
βεαα
+−−=
+−−=
&
&
[3.10]
Z uvedeného [3.10] vyplývá, že vliv zástavby elektrických pohonných jednotek do
nábojů kol na řiditelnost vozidla (statickou i dynamickou) je nulový. Jediným vlivem je
podélné rozložení hmotnosti, na kterém se jistě nemalou měrou budou podílet i
elektromotory a jejich příslušenství (při pohonu 4x4 by pak rozložení hmotnosti ve vozidle
mohlo být relativně rovnoměrné, otázkou však zůstává poloha dalších zařízení ve vozidle).
Odpadá tedy problém s jednostranným zatížením vozidla spalovacím motorem a
převodovkou jako u konvenčních vozidel. Možnosti aktivního řízení všech kol podle situace
se věnuje jeden z následujících odstavců.

- 34 -
3.3.2 Naklápění
V předcházejících odstavcích jsme uvažovali umístění těžiště v rovině vozovky.
V případě vyšetření naklápění karoserie vozidla již musíme zahrnout výšku těžiště
odpružené části h´, tuhost odpružení c a hmotnost odpružené části M. Při ustálené jízdě po
kruhové dráze se vlivem klopného momentu [3.11] mění svislé zatížení kol vozidla. Moment,
který působí proti naklápění, se nazývá vratný moment nápravy. [3.12]
hR
vMM k
2
= [3.11]
ψCM V = [3.12]
Veličina ψ je v tomto případě úhel naklopení nápravy a C je tzv. klopná tuhost
nápravy. Právě klopná tuhost je velmi důležitou hodnotou pro určení úhlu naklopení
karoserie vozidla. Pro každý typ zavěšení kol se C určuje jinak, základem je sestrojit střed
klopení a z rovnic rovnováhy pak zjistit hodnotu klopné tuhosti nápravy. Úhel naklopení
nástavby vozidla za předpokladu stejných typů zavěšení pro přední i zadní nápravu je
uveden níže. [3.13]
( )RhMgC
vhM′−
′=
2
2
ψ [3.13]
Z uvedeného můžeme konstatovat, že díky absenci pohonné jednotky a ostatních
konvenčních komponentů v množině odpružených částí, se M podstatně zmenší. Tím bude
docházet k menším náklonům karoserie v zatáčkách. Důsledkem pak budou zlepšené jízdní
vlastnosti například v případě potřeby náhlé změny směru. Důležitým parametrem je pak
hodnota klopné tuhosti C. Tu můžeme ovlivnit jednak vhodnou tuhostí pružin, správně
nastavenou geometrií kol a vhodným typem zavěšení a jeho kinematikou. Další možností jak
ovlivnit naklápění je přítomnost účelově nastavených stabilizátorů náprav, které zvýší
klopnou tuhost nápravy. Závěrem tohoto odstavce shledáváme z hlediska klopení karoserie
přítomnost elektrických jednotek v kolech pro jízdní vlastnosti a aktivní bezpečnost vozidla
jako prospěšný.
3.4 Možnosti eliminace neodpružených hmot a snížení jejich vlivu na vozidlo Z předcházejících odstavců můžeme vyvodit, že z hlediska dynamiky vozidla a vlivu
na jízdu, je zabudování elektromotorů do nábojů kol a tím zvýšení neodpérovaných hmot

- 35 -
určitým problémem. Nedostatky se projevují zejména v oblasti pérování vozidel. Vliv na
kontakt pneumatiky s vozovkou a pohodlí osádky je zvláště ve vysokých rychlostech značný.
Rozhodující, jak bylo uvedeno, je poměr mezi odpérovanou a neodpérovanou hmotou. Ten
by u těžkých nákladních vozidel nebo autobusů mohl být, i při zástavbě pohonu do kol, ještě
příznivý. V případě lehkých osobních vozidel, nebo dokonce malých městských dopravních
prostředků je však tento problém obtížně řešitelný. Více by napověděly simulace s přesně
zadanými jednotlivými veličinami.
Jako nejjednodušší cesta k eliminaci uvedených problémů je snížení hmotnosti
elektrických agregátů. Ty dosahují velmi rozdílných hodnot v závislosti na nominálním
výkonu pohonné jednotky. Nejlehčí motory o výkonu 20kW dnes mají hmotnost přibližně 7kg.
Ty největší motory vhodné pro zástavbu například do městských autobusů nebo nákladních
vozidel i více než desetkrát tolik. Nicméně tomu pak odpovídá i jejich výkon. Další možností
je snížit hmotnosti ostatních neodpružených komponentů. A to buď jejich nahrazením
sofistikovanějšími systémy, nebo použitím lehčích materiálů (např. u ramen zavěšení, nebo
použití loukoťových kol). Tím by se mohlo dosáhnout stejné hodnoty neodpružených hmot
jako u kola bez elektrického agregátu v náboji. Dobrou šancí jak vyřešit daný problém je i
možnost využít aktivně nastavitelných tlumičů. Ty by se svou charakteristikou přizpůsobovaly
danému jízdnímu režimu. V nízkých rychlostech, kde je vliv neodpružených hmot nižší, by
podle pokynů řídící jednotky sníženou tuhostí zajišťovaly osádce maximální pohodlí, a při
zvýšené cestovní rychlosti by naopak svojí tuhost zvýšily a na úkor pohodlí by zajišťovaly co
největší aktivní bezpečnost a co nejlepší jízdní vlastnosti. V případě vzdálenější budoucnosti
můžeme uvažovat i o podobném aktivním chování tuhosti pneumatik. Možností je i využití
aktivních tlumičů typu Sky-hook. Ve zlomcích sekund vyhodnocovat jízdní stavy a opět tak
přizpůsobovat charakteristiku tlumičů. Tím tak eliminovat nepříznivé vlivy neodpružených
hmot i bez snížení pohodlí osádky vozidla nebo zhoršení adhezních vlastností.
Jako nejsofistikovanější a zároveň nejslibnější cestou se v posledních pár letech
vývoje zdá řešení, které představilo nezávisle na sobě několik světových designérských
firem. Konstrukční řešení spočívá v dosažení minima neodpérovaných komponentů a co
největší snížení hmotnosti všech neodpérovaných komponentů. Jak již bylo výše naznačeno,
cesta vede k sdružovaní jinak nezávislých zařízení do jednoho celku, v našem případě
umístěného v nábojích kol. Do jednoho konstrukčního bloku se tak dostává nejen
elektromotor a brzdy (uvedené v předcházejícím řešení), ale i tlumení a odpružení vozidla.
Samozřejmě největším problémem se hned na první pohled zdají prostorové nároky
takovéhoto řešení. Již samotné umístění elektromotoru a integrovaných brzd představuje

- 36 -
prostorový problém. Pružiny, sloužící k pérování vozidla a zachycující rázy od kol, svou
délkou a průměrem ještě do vnitřního prostoru kola zakomponovat lze. Velký problém však
představují tlumiče. Z hlediska zdvihu jsou na vertikální prostor klasické vozidlové plyno-
kapalinové tlumiče značně náročné, proto je jejich použití hned zpočátku nemyslitelné.
Tlumení vozidla se tedy, zdá se, musí vyřešit jiným způsobem. Jako řešení se nabízí využití
dalšího elektromotoru a aktivních tlumičů jako náhrada plyno-kapalinových tlumičů. Celý
systém tak zajišťuje aktivní tlumení vozidla proměňující své parametry tlumičů podle aktuální
podmínek na vozovce (s rychlostí reakce v řádu tisícin sekundy). Přesto s minimálními
prostorovými nároky, které tak splňují podmínky dané vnitřním prostorem kolového disku.
Elektronická řídící jednotka by pak mohla měnit charakteristiku tlumičů v závislosti na
rychlosti jízdy, rychlosti natáčení předních kol, na výšce zádě karosérie nad vozovkou,
rychlení v podélném a příčném směru a na výšce přídě. Řidič by všechny vyhodnocené
situace dostával na displej palubní desky a mohl by tak neustále kontrolovat okamžitou
činnost zařízení. Tlumící jednotka každého z kol by měla být řízena samostatně, avšak
vzájemně koordinovaně, podle aktuálně vyhodnocené situace stavu jízdy a prostředí okolo
vozidla. Tak by se celá soustava optimálně přizpůsobovala okamžitým provozním
podmínkám.
Zmenšení naklánění vozu v zatáčce, potlačení předklánění při brzdění, nežádoucí
zaklánění při akceleraci a například omezení nežádoucích pohybů vozu na špatné nebo
nerovné vozovce (případně i v mírném terénu) by mělo zlepšit jízdní vlastnosti vozidla a
zvýšit jeho aktivní bezpečnost při jízdě za každé situace. Například tedy při jízdě v zatáčce
by soustava snižovala tuhost tlumení vnitřních kol a naopak by zvyšovala tuhost tlumičů na
straně vnější. Podobně by aktivní tlumiče, resp. řídící jednotka vyhodnocovala situaci při
brzdění či prudké akceleraci.
Regulace výšky vozu v závislosti na rychlosti jízdy (větší tuhost při vyšších
rychlostech) a signálech výšky přídě a zádě (zatížení vozidla) by byla další činností soustavy
aktivních tlumičů uvnitř samotných kol. Možnost výběru režimu by samozřejmě měla být
dána i řidiči. Ten by si volil např. celkovou světlou výšku vozidla (dle preference pohodlí nebo
lepších jízdních vlastností, nebo například pokud by se chystal do lehčího terénu). Nízká
výška vozu při vysokých rychlostech snižuje aerodynamický odpor (zmenšuje čelní plochu),
a zvyšuje stabilitu (zlepšené obtékání vozidla vzduchem).
Uvedené řešení pak zajišťuje zvýšení pohodlí a zlepšení jízdních vlastností nejen
úbytkem hmotnosti neodpružených částí, ale i použitím aktivního elementu tlumení, se
kterým se dnešní konvenční tlumící systémy (a to i ty nejlepší, fungující na principu

- 37 -
elektromagnetického ovlivňování hustoty kapaliny v tlumiči) nemohou srovnávat. Všechny
kolébavé a klonivé pohyby způsobené povrchem a stavem vozovky nebo samotnou jízdou,
jsou tak automaticky korigovány. Systémem aktivních tlumičů zcela jistě do budoucna
nastaví nové standardy v oblasti pohodlí, ale i jízdních výkonů – a tedy i aktivní bezpečnosti
vozidla.
V případě využití koncepce „all-in one“, tedy umístění všech důležitých částí do
středu samotného vozidlového kola, tak dojde nejen k mírné eliminaci neduhů, vlivů
neodpružených součástí (například absencí kulových čepů řízení a ostatních zařízení
sloužících k směrovému natáčení kol), ale i k podstatnému snížení celkové hmotnosti
vozidla. Zmíněným lze ušetřit nejen klasický spalovací motor (cca 300kg) jako u každého
konvenčního elektromobilu, ale i absencí diferenciálu a převodovky (cca 40kg) a spojky (cca
7kg) a kloubové hřídele (cca 3kg). Pokud bychom srovnávali s vozidlem 4x4, bude úspora
ještě větší díky nepřítomnosti nápravového diferenciálu, kloubových hřídelů, zadního
diferenciálu atd.
Slibnou technologií se jeví i elektronická klínová brzda, vyvinutá divizí VDO německé
firmy siemens. Jedná se o brzdu pracující na principu klínu. Tedy brzdové čelisti se díky
krokovému motoru přitlačují k brzdnému kotouči silou ekvivalentní sklonu roviny klínu, který
je posouván krokovými elektromotory. Toto řešení s sebou přináší další úsporu hmotnosti,
protože například všechny hydraulické části brzdové soustavy zde nejsou potřeba. Řidič
ovládá brzdu pomocí snímače v brzdovém pedálu, který následně vyšle elektrický impuls do
krokových motorů na brzdovém kotouči. Reakce na pohyb brzdového pedálu je tak značně
urychlena a samozřejmě vyvinutá brzdná síla mnohem větší. Blíže se tomuto systému budu
věnovat v další kapitole, protože firma Siemens v posledních třech letech použila koncepci
klínové brzdy i jakou součást konceptu eCorner, kde si vyzkoušela technologii zabudování
pohonného ústrojí do náboje kola.
Uvedené sice neskrývá nějaké fyzikální nebo faktické nedostatky (pokud počítáme
problém plyno-kapalinových tlumičů za vyřešený použitím aktivních elektronických tlumících
prvků), nicméně jisté problémy lze pozorovat. Jsou to samozřejmě již zmíněné prostorové
nároky celého řešení, které vyžaduje rapidní zmenšování všech součástek při zachování
jejich výkonu. Velkým problémem se jeví však především přenos výkonu pohonné jednotky,
která je teď v množině odpružených částí, na kolo, které je však neodpružené, a svými
pohyby reaguje na aktuální stav jízdy. Problém lze řešit převodem s ozubením na vnitřní
straně kola nebo planetovým ozubením. Lepším řešením je však použití elektromotorů

- 38 -
s vnějším rotorem. Podrobnému konstrukčnímu řešení se pak budu věnovat v další části této
práce.
Také na pružiny jsou kladeny značné prostorové nároky. Pro správnou funkci
vozidlových pružin, je potřeba vhodně zvolit především jejich tuhost. Ta se však ovlivňuje
jednak průměrem materiálu a především počtem otáček a celkovou výškou. Dokonce i
nelineární tuhost pružení dosažené nekonstantním stoupání pružiny je z dnešního přísného
pohledu na pohodlí jízdy důležité. To však klade relativně nepřiměřené prostorové nároky
vzhledem k volnému prostoru, které lze využít uprostřed kola k zastavění jednotlivými
konstrukčními prvky. Běžná celková výška pružiny je přibližně 370mm. Vnitřní průměr 15“
disku je 380mm. Je jasné, že běžná tradiční pružina by se v tomto případě nedala použít.
Řešením by pak mohlo být například použití dvou axiálně symetrických pružin o různých
tuhostech nebo jiné sofistikovanější řešení.
4. Konstruk čně - technické řešení
Zástavbu pohonné elektrické jednotky do náboje kola lze provést samozřejmě
několika způsoby. Každé dané řešení s sebou přináší řadu výhod i nevýhod. Záleží
především na technologických možnostech. Ty nejlepší řešení totiž bývají technologicky a
v neposlední řadě také finančně velmi náročné. Jako prvním bych začal tedy řešením
nejjednodušším, podstatou se nelišícím od v úvodu zmiňovaném prvního elektromobilu
německého konstruktéra českého původu Ferdinanda Porsche.
4.1 VAR.I Klasický elektromotor v náboji kola
Toto řešení spočívá v použití klasického elektromotoru jakéhokoli vhodného typu
kompaktní zástavby s výstupní pohonnou hřídelí. Na tuto hřídel je pak nasazena kotoučová
brzda a přírubové kolo se závitovými otvory pro nasazení disku kola a upevnění obvyklými
kolovými šrouby. Schéma na obrázku 3.1 popisuje konstrukční uspořádání. Elektromotor (1)
je zavěšen konvenčními závěsy na karoserii i s osou řízení (2). Na Výstupní hřídel je pomocí
přírubového kola (6) umístěn disk (3) a brzdový kotouč (5) i s brzdovými třmenem (4).
Výhodou je určitě relativní jednoduchost a využití konvenčních součástí a běžných zařízení
pro zavěšení kola na karoserii, řízení, pružení i tlumení. Uvedené lze však vidět v opačném
smyslu jako největší nevýhody. Kromě prostorové náročnosti a velké neodpružené hmotnosti
je velkou výhodou robustnost takového konstrukčního celku. Obecně se takto zastavěný
elektromotor využíval dříve, protože toto řešení umožňuje využít již sériově vyráběného
prakticky jakéhokoli elektromotoru. Proto se tohoto typu pohonu často využívá u různých
přestaveb vozidel na elektromobily apod. Nezanedbatelné je také například použití v zadních

- 39 -
nábojích elektrobicyklů a elektroskútrů. Nicméně je třeba poznamenat, že nově navrhované
a představené automobily s elektrickým pohonem využívají z větší části především technická
řešení uvedené v dalších dvou kapitolách.
Obr. 3.1 Schéma – Var. I
4.2 VAR. II Elektromotor s vn ějším rotorem v náboji kola
Další možný způsob umístění elektromotoru do kola ukazuje kinematické schéma na
obrázku 3.2. Základem je použití elektromotoru s tzv. vnějším rotorem. To nechává dostatek
prostoru uvnitř kola pro případné umístění dalších částí. Náboj kola s ložisky (10) je umístěn
na pevně uložené hřídeli (3) a brzdový kotouč i s třmenem (7,8) jsou spolu s diskem kola (6)
běžným způsobem pomocí kolových šroubů spojeny. Stator elektromotoru (2) je pak
podepřen pomocí podpěry (4) umístěné na pevné části zavěšení kola i s řízením (5). Rotor
(1) pak roztáčí disk pomocí podpěry (9) a všechny ostatní otáčené součásti.

- 40 -
Obr. 3.2 Schéma – Var. II Obr. 3.2 Schéma toku točivého momentu
4.3 VAR III. Elektromotor v jednom celku s ostatním i komponenty - all-in one
Poslední variantou konstrukčního uspořádání můžeme chápat jistou evoluci varianty
předchozí. Princip zůstává stejný, jen pružení, tlumení a řízení vozidla se spolu s pohonnou
jednotkou také přesunou do středu kola. V tomto případě se tedy opět náboj kola (12) otáčí
kolem pevné osy (6). Ta je pevně uložena na podpěru statoru (7) a závěsem spojena
s tlumením (3), pružením (4) a řízením (5). Točivý moment je vyvíjen mezi statorem (2) a
rotorem (1), který přes podpěru rotoru (11) roztáčí disk kola (8) a brzdový disk (10).

- 41 -
Obr. 3.2 Schéma – Var. III
Schéma toku kroutícího momentu v jednotlivých variantách a podrobnější výkresové
dokumenty najdeme v obrazové příloze této práce.
5. Možnosti řízení trakce a sm ěrového chování vozidla
Absence obvyklých pohonných mechanických prvků známých z tradičních vozidel
dneška s sebou přináší kromě výhod zmíněných výše i další přednosti. Díky uvolněnému
prostoru lze například všechna kola nezávisle na sobě a závisle na jízdním režimu a jízdních
podmínkách na vozovce jakkoli řídit. Libovolně na každém kole lze tak ovládat výkon
přenášený na vozovku proměnný v čase dle potřeby a zvýšit tak přínos pohonu všech kol pro
aktivní bezpečnost vozidla a tedy například i řidičův požitek z jízdy. Nezávislé natočení kol v
případě zásahu systémů jízdní stability, při parkování nebo při sportovní jízdě na přání řidiče
se zdá z pohledu vývoje jako možné. V případě využití elektricky ovládaných brzd (například
u výše popsaného jednoho konstrukčního celku více funkcí ve středu disku), a tedy absenci
hydraulického ovládání, se samozřejmě také usnadňuje ovládání všech digitálně řízených
stabilizačních systémů a úměrně k tomu zrychluje jejich rychlost reakce a zpětné odezvy. I
poslední mechanický prvek – řízení – lze s úspěchem vynechat a nahradit ho
elektromechanicky řízeným systémem, tak jak to známe například z leteckého průmyslu.
Všem těmto novým koncepcím, a jak je ovlivní zabudování elektromotorů do nábojů kol, se
věnuje tato kapitola.

- 42 -
5.1 Aktivní řízení zadních kol, 4WS Role zadní nápravy v celkové stabilitě vozidla je již notoricky známá. Obzvláště
protichůdné požadavky na obratnost při nízké rychlosti a naopak jízdní stabilitu a tedy aktivní
bezpečnost v rychlostech vysokých jsou značně problematické. Proto již v osmdesátých
letech dvacátého století řada firem z automobilového průmyslu začala pracovat na možnosti
řídit zadní kola tak, aby to co nejvíce vyhovovalo aktuálním podmínkám, ve kterých se
vozidlo nachází. Snahou tedy bylo navrhnout konstrukční řešení zadní nápravy tak, aby
došlo k zmenšení průměru otáčení a zvýšení obratnosti při pohybu vozidla nízkými
rychlostmi (město, parkování) a zároveň k nárůstu stability při jízdě vyššími rychlostmi,
odpovídající běžným limitům (například dálnice). Z hlediska jízdní dynamiky lze tyto
podmínky splnit natáčením zadní nápravy, což plyne z geometrických poměrů mezi koly a
nástavbou vozidla. Důkazem by mohl být obrázek 4.1 a následující úvaha: Posuzuje-li se
nárůst bočních sil na předních, popř. zadních kolech bezprostředně po skokovém natočení
volantu, ukazuje se, že u konvenčního řízení předními koly se zpočátku zadní náprava
nepodílí na pohybovém ději. Při současném natočení předních i zadních kol v opačném
smyslu se okamžitě zvyšuje stáčivý moment a tím i otáčení vozidla kolem svislé osy (stáčivý
pohyb) a v případě souhlasného řízení (zadní kola jsou natáčena ve stejném smyslu jako
přední) se stáčivý moment snižuje a bezprostředně dochází k bočnímu pohybu celého
vozidla. [8]
Obrázek 4.1 Bo ční síly p ři náhlém nato čení volantu [8]
Na prvním obrázku můžeme schématicky pozorovat právě zvětšení otáčivého
momentu v případě opačného smyslu natočení kol přední a zadní nápravy. Prostřední
obrázek pak představuje konvenční systém – zadní náprava se na směrovém pohybu
dynamicky nepodílí. Poslední variantou je pak podle třetího obrázku zcela vpravo souhlasný
smysl natáčení, kdy dochází ke zmenšení otáčivého momentu.

- 43 -
Pro současné zlepšení obratnosti a zároveň zvýšení aktivní bezpečnosti při jízdě je
tedy nutné využít nějaké technické řešení nabízející změnu natočení zadních kol (podle
režimu v souhlasném nebo nesouhlasném směru). Lze namítnout, že moderní víceprvkové
zadní nápravy umožňují vlivem elastokinematického uložení jisté změny natočení. Nicméně
tyto pohyby kola kolem vertikální osy jsou velmi malé, nezávislé na vůli řidiče nebo řídící
jednotky vyhodnocující potřebu dle aktuální situace, a navíc tento pasivní systém působí i při
jízdě v přímém směru. Při najetí vozidla jedním kolem na nerovnost se totiž zhoršuje
směrová stabilita. Toto řešení je tedy z hlediska budoucích přísných nároků na jízdní
bezpečnost a uživatelskou přívětivost nepříliš vhodné.
Je nutné tedy využít aktivního řízení zadních kol. Které při pomalém zatáčení dokáže
natočit kola souhlasně a při vyšších rychlostech nesouhlasně. Konvenční aktivní natáčení kol
(4WS – 4 Wheels Steering), však je s klasickou koncepcí nejen technicky náročné, ale i
značně nákladné. Z dosavadního vývoje se proto technologie v masové automobilové
technice příliš neprosadila. Nepříliš elegantní a jednoduché natáčení zadní nápravy
mechanickým způsobem (kloubovým hřídelem) nebo elektronicky řízeným hydraulickým
způsobem by se tedy v případě uvolnění tradičních mechanických vazeb řízení a pohonu
mezi kolem a nástavbou (tedy v případě použití řešení s elektromotory v nábojích kol) dalo
nahradit sofistikovanějším. Absence složitých kinematických nebo hydraulických zařízení by
tak mohla znamenat větší volnost a vhodnější reakce.
Řízení zadních kol by mělo být samozřejmě regulováno podle rychlosti jízdy, stavu
vozovky a jízdním režimu (město, sportovní, zhoršené adhezní podmínky). Úhel a směr
samotného natočení by pak nastavovala řídící jednotka rozhodující se na základně informací
z různých typů snímačů (rychlost jízdy, úhel natočení volantu, boční zrychlení atd.).
Naměřená data z čidel by pak mohla být porovnávány z „ideálními“ hodnotami a z rozdílu by
řídící jednotka rozhodla o úhlu a směru natočení zadní nápravy. Pro snadnou
manévrovatelnost by se zadní kola do rychlosti cca 40km/h měla natáčet nesouhlasně (tzn.
proti smyslu řízení předních kol). Jízda vysokými rychlostmi například na rychlostních
komunikacích však vyžaduje pro zlepšení stability řízení souhlasné. Zadní kola jsou však
přirozeně už vychylována mnohem méně.
Elektricky poháněné aktivní natáčení kol zadní nápravy by tak mělo být velkým
příslibem do budoucna z hlediska jak jízdní dynamiky, tak mrštnosti v intravilánu. Využití
pohonných jednotek v samotných kolech by samotnou problematiku značně zjednodušilo a
toto technické řešení zpřístupnilo i malým městským vozidlům (viz odstavec např. odstavec
3.3). Cílem toho řešení je především: lepší stabilita při předjíždění, zmenšení kmitání vozidla

- 44 -
kolem svislé osy, menší citlivost na boční vítr, neutrální chování při zatáčení – tedy zvýšení
aktivní bezpečnosti. [10] Menší spotřeba energie a úspora hmotnosti při absenci
hydraulického vedení jsou také velmi podstatné vlastnosti tohoto systému.
5.2 Aktivní natá čení všech kol p ři pohybu ve m ěstě
Jak již bylo uvedeno v předcházejícím odstavci, vedlejším, ale z dnešního přísného
pohledu, velmi podstatným efektem natáčení všech kol je schopnost velmi snadného
parkování a manipulace s vozidlem ve stísněných podmínkách měst. U malých vozidel
určených pro provoz převážně v městské zástavbě, je naopak tato vlastnost velmi žádaná.
Nutno podotknout, že umístění pohonné jednotky do středu kola a aktivní natáčení kol dle
řidičovy potřeby při manévrování by měly být v budoucnu neoddělitelné a stěžejní
technologie pro městská vozidla.
Oproti požadavku na zvýšenou stabilitu ve vyšších rychlostech vyžaduje pohyb
v intravilánu nesouhlasné řízení zadních kol. Z geometrických poměrů při zatáčení pak
vyplývá, že dojde ke zmenšení poloměru zatáčení a k zvýšení otáčivého momentu (což však
v malých rychlostech nepředstavuje snížení bezpečnosti vozidla). Předpokladem pro
úspěšné rozšíření tohoto systému je samozřejmě nutnost použít jako zdroj energie elektrický
pohon. To rapidně zjednoduší celou konstrukci řízení a díky nepřítomnosti hydraulických a
mechanických členů i k mnohem větší svobodě v navrhování. Aktivní kinematika všech kol
by se tak mohla stát součástí každého vozidla. Každé kolo by mohlo být poháněno vlastním
elektromotorem (lze využít i ten sloužící k pohonu vozidla) a natáčet tak všechny kola
nezávisle na sobě. Jakou by to přineslo možnou volnost pohybu je jasné. Vozidlo by bylo
schopno parkovacích manévrů, které jsou z dnešního pohledu konvenčních dopravních
prostředků nemyslitelné. Samostatné natočení každého kola by tak bylo ovládáno řídící
jednotkou, aby bylo dosaženo co nejlepšího efektu. Vozidlo by tak mohlo být například
v automatickém režimu, kdy by počítač vyhodnocoval situaci a podle toho upravoval
natočení kol (podle úhlu natočení kol, v závislosti na úhlu a rychlosti natočení volantu, na
rychlosti jízdy, úhlové rychlosti stáčení vozu kolem svislé osy, na příčném zrychlení), nebo
v určitých režimech, které by si vybral sám řidič. K jinému chování by tak docházelo při
parkování, pomalé jízdě, couvání a podobně. V případě instalace pohonných elektrických
jednotek do samotných kol by řídící jednotka zajišťující aktivní kinematiku kol mohla převzít
kontrolu i nad samotnou regulací výkonu jednotlivých kol a upravovat je tak podle potřeby
parkování. To by umožnilo pohodlné parkování například při nepříznivých adhezních
podmínkách nebo na nerovném úseku vozovky (terénu).
Samotné řešení ale skýtá i jisté nevýhody převážně na straně lidského elementu.
Chování vozidla vybaveného takovouto technologií je značně odlišné od současných

- 45 -
tradičních s řízenou jednou nápravou. Praktické zkoušky totiž prokázaly, že tato vozidla
kladou značné požadavky na přivyknutí řidiče. Důvod pro to je spojen s podstatou problému,
neboť při nesouhlasně řízených zadních kolech neleží pól otáčení vozidla na prodloužené
ose zadní nápravy, nýbrž se přemisťuje směrem dopředu. Tímto vybočuje záď vozidla při
velkých úhlech natočení volantu silněji do strany než u konvenčních vozidel. Vzniká pak
reálné nebezpečí, že záď vozidla koliduje s dalšími vozidly nebo předměty.[8] Jednou
z možností řešení tohoto problému by mohla být instalace automatického parkovacího
systému či asistenta. Některá klasická vozidla jsou toto technologií vybavena již dnes (např.
Škoda Superb druhé generace). Nutný je samozřejmě velmi rozsáhlá soustava detekčních
senzorů, které by dokonale prohlíželi prostor okolo vozidla (v současné době již také běžná
technologie). Systém by tak například mohl vyhodnocovat při projíždění kolem řady vozidel
mezery a v případě pozitivního výsledku upozornit řidiče. Poté by již řidič ovládal jen rychlost
a vozidlo by automaticky podle předem vypočítané trajektorie za využití aktivního
nezávislého natáčení kol samo zaparkovalo. Stejně by se pak vozidlo chovalo při vyjíždění.
Rozsah natočení jednotlivých kol by záležel na konstrukčních zpracování, nicméně
lze předpokládat, že by mohl dosahovat až k hodnotám blížícím se 90°. To by umož ňovalo
parkovací manévry, které daleko převyšují možnosti současných dopravních prostředků.
Příklad několika možných způsobů parkování uvádí obr. 2.2
Obrázek 4.2 Zp ůsoby parkování p ři aktivní kinematice všech kol [8]

- 46 -
5.3 Pohon všech kol Potřebnost neustálé stability vozidla nejen při zhoršených povětrnostních podmínkách
(déšť, sníh), ale i například při necitlivém zacházení s vozidlem či sportovní jízdě, spolu se
zvyšujícími požadavky na bezpečnost stále více pohání kupředu vývoj vozidel s pohonem
všech čtyř kol (4x4). Nicméně z fyzikální podstaty je přenos sil mezi spalovacím motorem a
jednotlivými nápravami (tedy nutnost využít složitých mechanismů – převodovky,
diferenciály, spojky) stále poměrně komplikovaný (vysoké prostorové nároky a stále ještě
finanční náročnost) a brání širokému využití tohoto nanejvýš přínosného systému napříč
všemi třídami automobilů.
Přitom výhody takovéhoto pohonu jsou nesporné. Na vozovce pokryté sněhem nebo
ledem, kde součinitel adheze dosahuje hodnoty mezi µ = (0,1 ; 0,3), jdou nedostatky
pohodnu pouze jedné nápravy patrné i u vozidel s nevýkonnými motory. To lze odstranit jen
vysokým statickým zatížením hnací nápravy nebo pohonem druhé nápravy. [5] Tento
nedostatek se pak projevuje i u velmi výkonných vozidel i na suchém povrchu s relativně
vysokým součinitelem adheze. Kromě zajištění dobré trakce při rozjezdu vozidla však
neméně důležitou oblastí, kde pohon všech kol přináší řešení, je stabilita vozidla v zatáčce.
Přínos plynulého přenosu točivého momentu mezi jednotlivými nápravami (u některých
druhů pohonu i mezi jednotlivými koly) je pak samozřejmě i například při sportovní jízdě
v zatáčce, nebo při rozdílných adhezních podmínkách v různých částech vozovky (námraza,
sníh, spadané listí, výmoly). Pouze pohon všech kol může zajistit maximální trakci, stabilitu a
neutrální, případně mírně nedotáčivé (přetáčivé) chování za většiny jízdních stavů. Tento
systém v sobě spojuje výhody obou předchozích (zadního a předního pohonu – pozn.
autora). Vysokou stabilitu a trakci, při zachování dostatečné agility, kdy přední kola nejsou
tolik ovlivněna hnacími silami. [5] Jasnou výhodu pohonu všech čtyř kol v průjezdu zatáčkou
dokládá následující obrázek 4.3.
Obrázek 4.3 Jízdní stopa r ůzných druh ů pohonu [27]

- 47 -
Zmíněné lze doplnit již jen konstatováním, že pohon všech kol významně přispívá
k jízdní bezpečnosti (aktivní bezpečnosti) vozidla a to i bez zásahů elektronických řídících
systémů (ESP). V případě požadavku využití pohonu všech kol především pro zvětšení
stability vozidla (a ne pro zvýšení trakce, tedy například průjezdnosti terénem u Off-road
vozidel či vozidel nákladních) však je potřeba využít plně proměnlivého a plynulého
rozdělování točivého momentu. Na základě vypočítaných pokynů řídící jednotky
stabilizačního systému na změnu přenosu kroutícího momentu (činnost blíže popsána
v kapitole 5.5 i s ohledem na problematiku elektromobilů) se nám do rukou dostává silný
nástroj, jak regulovat aktuálně nebezpečný jízdní stav vozidla, či jen upravit jeho
charakteristiku průjezdu zatáčkou. Nicméně právě této regulace lze dosáhnou u konvenčních
systémů pohonů všech čtyř kol jen složitými převodovými mechanismy s využitím viskózních
či elektromagnetických prvků pro zvýšení svornosti apod. nebo ustoupit a použít některý
z méně sofistikovaných systémů za cenu nedokonalého řízení přenosů točivých momentů.
Tento problém jednoduchou cestou samozřejmě řeší využití zástavby elektromotorů
do nábojů kol. Protože výkon pohonných jednotek není přenášen na kola mechanickou (či
hydraulickou) cestou a řídící povely do elektromotoru jsou dodávány čistě elektrickým
přenosem energie, lze vypustit klasické součásti jako je nápravový a složitý mezinápravový
diferenciál, spojovací hřídele, hnací hřídele a mnoho dalších dílů (viskózní či
elektromagnetické spojky, uzávěrky diferenciálů apod.). Ze snímačů úhlu natočení volantu,
otáček jednotlivých kol, aktuální stáčivé rychlosti, bočního zrychlení a rychlosti jízdy tak
může jednoduše bez složitých mechanických dílů řídící jednotka ovlivňovat přenos točivého
momentu na jednotlivá kola nezávisle na sobě a regulovat tak jejich prokluz a otáčky.
Typicky tak může simulovat uzávěrky diferenciálů (mezinápravového i nápravových) při
aktuální jízdní situaci zvyšováním či snižováním výkonu jednotlivých elektromotorů. Chování
a možnost stabilizace takového vozidla tak předčí i současné nejvyspělejší aktivně
regulované pohony všech kol. A to bez strojírensky a finančně velmi náročných dílů, téměř
bez jakýchkoliv kompromisů. Točivý moment tak může být přerozdělován nejen na základě
aktuální přilnavosti pod koly jak je to u běžný systémů 4x4 ale i na základě rozhodnutí řídící
jednotky podle aktuálně prováděného manévru. (například průjezd zatáčkou).
Z uvedeného je patrné, že v případě rozšíření elektromobilních vozidel s pohonnými
jednotkami v nábojích kol by se uživateli běžných vozidel mohlo dostat luxusu vysoké aktivní
bezpečnosti dnešních nejsofistikovanějších vozidel s aktivními diferenciály. Tato koncepce je
samozřejmě lákavá i pro ostatní kategorie aut. Například pro terénní či nákladní vozy.
Schopnost rychle regulovat točivý moment na kolech podle aktuální situace pod koly by se
mohla stát velkou výhodou při průjezdu obtížným terénem. V další části však uvidíme, že

- 48 -
špičkově regulovatelný pohon všech čtyř kol není jediným přínosem ke komfortu ale i
bezpečnosti osádky vozidla v případě zástavy pohonných jednotek v kolech.
5.4 X-by-wire
Koncepce vozidla s absencí konvenčních motorových a podvozkových prvků
samozřejmě dává také nové možnosti co se týče samotného ovládání vozidla. Při použití
sofistikovaných systémů řešených v této práci můžeme vyřadit ze zástavby ve vozidle
mechanické a hydraulické systémy, které v dnešních vozech ovládají například řízení,
brzdění, akceleraci a regulaci podvozku. Nahradit je můžeme totiž velmi důmyslnými
elektronickými systémy. V inteligentním automobilu elektronické signály informují systém o
úmyslu řidiče zatočit, zrychlit, zabrzdit, zastavit atd. Je to podobné jako u technických
vynálezů leteckého inženýrství, díky nimž mohla být letadla zbavena těžkých mechanických
dílů, které ovládaly jejich manévrovací schopnost a představovaly pro pilota obtížnou práci.
Namísto nich nastoupili důmyslné elektronické ovládací systémy typu Fly-By-Wire. [11]
Z uvedené citace vyplývá, kudy se bude následující vývoj ovládání a komfortu vozidla ubírat.
Primárním nedostatkem se zdá být otázka bezpečnosti a spolehlivosti systému. Nicméně
právě letecký průmysl dokazuje, že tento problém se dá řešit například několikanásobným
zálohováním systému a tím dosáhnout nadprůměrné spolehlivosti.
Obrázek 4.1 Schéma podsystém ů X-by-Wire
Systémy elektronického řízení lze rozdělit do několika kategorií. Nahrazují zásadní
celky konstrukce automobilu. Jsou to především Drive-by-Wire (elektronický pedál plynu),

- 49 -
Brake-by-Wire (elektronický systém brzd) a Steer-by-Wire (elektronické ovládání řízení).
Všechny tyto systémy by měly umět pracovat na sobě nezávisle, ale zároveň jejich činnost
v případě nutnosti koordinovat tak, jak to bude výhodné pro daný stav jízdy.
5.4.1 Drive-by-Wire
V současné době již tento systém je u osobních automobilů běžným jevem.
Elektronický pedál je však v případě využití elektrického pohonu vozidla jak vyplývá
z principu nezbytný.
5.4.2 Brake-by-Wire
Koncepcí elektronického (elektro-hydraulického nebo elektro-mechanického) ovládání
brzdění vozidla chápeme především nahrazení klasického mechanicko-hydraulického
spojení brzdového pedálu a samotných brzdičů za spojení čistě elektrickou cestou.
Principielně dochází ke snímání povelů vydaných řidičem (brzdovým pedálem) a přenesení
těchto signálů elektronickým rozhraním do řídící jednotky. Ta prostřednictvím příslušných
akčních členů zajistí potřebný brzdící účinek na kolech. Signál od řidiče je vyhodnocen a na
základě aktuálních podmínek pak může být upraven, aby docházelo k co nejefektivnějšímu
rozdělení brzdné síly. Po sešlápnutí pedálu brzdy nebo při stabilizačním zásahu ESP řídící
jednotka na základě programového algoritmu vypočítá požadovanou hodnotu brzdného tlaku
pro každé kolo. Protože se tato tlaková hodnota vypočítává a měří pro každé kolo zvlášť, je
možno,..., řídit brzdný tlak jednotlivě pro každé kolo. [11] Aby řidič mohl dobře dávkovat
brzdný účinek, a vozidlo se mu dobře při brzdění ovládalo, měl by být ve vozidle umístěn tzv.
simulátor pedálové dráhy. Ten vytváří umělý odpor dráze brzdového pedálu a nastavuje tak
uživatelsky příjemnou charakteristiku brzdění. To umožňuje řidiči snadno citlivě dávkovat
brzdnou sílu v normálním provozu a v případě kritického brzdění naopak snadno a rychle
sešlápnout brzdový pedál v maximální možné míře aniž by došlo ke kolísání brzdného
účinku tak jak je tou klasických hydraulických brzd.
Zajímavou funkcí, kterou lze do systému Brake-by-Wire implementovat je tzv. funkce
suché brzdy, která při jízdě na mokrém povrchu aktivuje pro řidiče nepostřehnutelné
pravidelné, rychlé a slabé brzdící impulzy, které odstraňuje vodní film na povrchu brzdových
kotoučů, aby byl neustále zajištěn nesnížený a okamžitý brzdící účinek. Tato funkce se
aktivuje se zapnutím stěračů. [11]
Možností, které nekonvenční brzdové systémy u elektromobilů umožňují, je opravdu
hodně. Jedním z dalších příkladů, velmi se hodícím k tématu elektromotorů v nábojích kol.
resp. v zabudování jednoho funkčního celku zahrnující několik odlišných částí vozidla do

- 50 -
jednoho, je elektronická klínová brzda EWB vyvíjená firmou
Siemens VDO. Ta se svým principem obzvláště hodí k využití
u nového systému pohonu vozidla především díky absenci
hydraulického ovládání, rychlostí reakce, snadnou regulací a
především kompaktními rozměry celého systému. Základem je
samozřejmě běžný brzdový kotouč a brzdový třmen. Mezi ně
je však vtlačován klín, který má díky svému tvaru tendenci
přitlačovat třecí segment k brzdovému kotouči ekvivalentní
silou k točivému momentu na kolech. Klín tak využívá kinetickou energii vozidla a mění ji na
mechanickou energii potřebnou k brzdění vozidla. Otáčením samotného brzdového kotouče
je tak brzdný účinek samočinně zesilován. Tím je možno dosáhnout nízkou z vnějšku
dodávanou energii velkého brzdného účinku. Míra přítlaku třecího segmentu ke kotouči přes
klín je ovládána dvěma malými krokovými elektromotory. Ty řídí elektronická jednotka
vyhodnocující povely od řidiče a aktuální silové poměry panující na brzdách. Podle
změřených hodnot a přicházejícího brzdového signálu pohybují elektromotory brzdový klín
do potřebné polohy. Tento pohyb je realizován z víceválečkového klínového ložiska. Takto
aktivovaný třecí segment je přitlačován na brzdový kotouč. Regulace pak zajišťuje, aby se
klín neblokoval. Odpadají konstrukční díly konvenční brzdy jako hydraulické vedení a
brzdové válce, nádržka brzdové kapaliny (asi 22 litrů brzdové kapaliny), posilovače brzd a
řídící jednotka ABS. [11] Výhody plynoucí z takovéhoto konceptu brzd jsou jasné. Mimo
úsporu hmotnosti a místa je to především rychlost reakce (řádově rychlejší než u
hydraulických brzd), snadná regulace brzdové síly a její řízení v čase (ABS) a z toho
vyplývající zkrácení brzdné dráhy.
Obrázek 4.1 Schéma EWB (1 – brzdový kotou č, 2 – brzdová desti čka, 3,4 – elektromotory, 5 – klínové
tyčinky, 6 – pevná op ěrná deska [29]

- 51 -
Jako další výhoda zmíněného systému elektronické klínové brzdy je pak zmiňována
možnost absence klasické ruční parkovací brzdy, protože nová klínová brzda dokáže zastat i
tuto důležitou funkci vozidla.
5.4.3 Steer-by-Wire
Řízení vozidla bez klasických hydraulicko-mechanických vazeb je jednou z dalších
výhod, které lze využít v případě zástavby elektromotorů do nábojů kol. Elektromotory
primárně sloužící k pohonu vozidla by mohly sloužit i jako zdroj energie k natáčení kol a
řízení vozidla. Elektronický přenos energie by tedy nahradil hřídel volantu, převodku řízení,
posilovač řízení a všechny klasické mechanické vazby mezi řízením a řízením v závěsech
kola. Jedna z výhod by mohla být i nastavitelná charakteristika řízení (tužší při sportovní
jízdě, lehčí při parkování) dle požadavků řidiče nebo automaticky, ale největší výhodou se
v současné době zdá možnost využití regulace natočení kol systémem jízdní stability ESP.
Řízení po drátě Steer-by-Wire by dokázalo přesnější a přinejmenším stejně rychlé korektury
řízení za účelem zajištění stability jízdy. V případě elektrického řízení vozidla by bylo možno
kompenzovat popsaný nežádoucí efekt tak, že by po rychlé, náběhu brzdného tlaku
následovala elektronická korekce řízení působící proti směru vznikajícího smyku. Stejně
dobře by mohlo elektronické řízení zasáhnout při směrové odchylce v důsledku silného
bočního větru nebo při vybočování přívěsu apod. [11] Především přetáčivý smyk je pro
běžné uživatele velmi zákeřný a právě rychlá korekce natočení kol proti směru vybočení
zádě je velmi účinným řešením.
Problémem který zatím brání tomuto přístupu je však především bezpečnost, která se
však dá spolehlivě řešit vícenásobným zálohováním (i například záložním zdrojem energie –
akumulátorem) a možná i jistá nedůvěra zákazníků.
5.5 Elektronické systémy jízdní stability
Jak již bylo uvedeno, umístění elektromotorů do všech čtyř kol a jejich nezávislá
regulace vytváří nové možnosti pro udržení stability vozidla i za extrémních podmínek.
Jednodušším řízení všech důležitých časově proměnných veličin lze rozhodně dosáhnout
velmi uspokojivých výsledků.
Ovladatelnost vozidla je zcela nepopiratelně limitována především velikostí sil, které
lze přenést mezi koly a vozovkou ať už při brzdění, nebo při akceleraci. Čím větší je skluz,
tím menší je schopnost kola přenášet boční síly, které jsou nutné ke změně směru jízdy.
K účelu omezení skluzu kola jsou již řadu let u motorových vozidel využívány systémy jízdní
stability (ABS, ASR, ESP, EBD, EDS apod.). Při velkém skluzu se snižuje hnací síla a rovněž

- 52 -
dochází k silnému poklesu boční síly mezi pneumatikou a vozovkou a tím ke ztrátě stability
vozidla. Zjistí-li elektronická řídící jednotka, že některé z nich začíná prokluzovat, zasahuje
regulace. [11] Přínos těchto systémů je nesporný, přesto však s nástupem technologií o
kterých pojednává například tato práce, lze jejich funkci posunout ještě dále. Rozhodující
veličinou je v této problematice čas. Rychlost reakcí je základním předpokladem k včasnému
zásahu řídící jednotky do jízdy vozidla při náhle vzniklé kritické situaci. A právě tato rychlost
by se, při absenci konvenčních pohonných, řídících a brzdových částí zastavěných v různých
částech vozidla a integrací do jednoho celku v kole, mohla rasantně zvýšit. V současnosti
běžně používané systémy jízdní stability využívají několik způsobů regulace, případně jejich
kombinace [10] :
- motorová regulace (snížení hnacího momentu)
- brzdová regulace (přibrzďování hnacích kol)
- regulace uzavírání diferenciálu
- zásah do spojení motoru s hnacími koly
To s sebou samozřejmě přináší řadu komplikací a zřetelných nevýhod. U zážehových
motorů musí být regulováno vstřikování paliva, zapalování a poloha škrtící klapky. To
z hlediska pohodlí, zatížení motoru a složení výfukových plynů není ideální a reakční doba je
vcelku nepříznivá (i při použití přídavného zásahu do vstřikování a zapalování). Regulovat
uzavírání diferenciálu, či nějaké jeho náhrady (Viskózní spojka nebo systém Haldex) je
komplikované a i tak docílíme maximálně nezávislého řízení přední a zadní nápravy.
Nejnovější systémy pohonu 4x4 umí regulovat přesun výkonu i mezi jednotlivými koly
pomocí elektromagnetických spojek, nicméně jejich konstrukce stále nenabízí potřebnou
jednoduchost a nenáročnost, aby mohlo dojít k masovému rozšíření do vozidel napříč
třídami.
V případě umístění elektromotoru přímo do kola se tak zdá být problém vyřešen.
Možnosti regulace točivého momentu na jednotlivých kolech jsou jasné. V případě náhlé
krizové situace by se mohl upravovat točivý moment na jednotlivých kolech podle pokynů
z centrální řídící jednotky stabilizačního systému rozhodující se na základě údajů z několika
senzorů. Toto řešení proto dává netušené možnosti. Stejně tak by v případě použití
elektronického řízení mohla jednotka nastavovat úhel natočení jednotlivých kol nezávisle na
sobě a vůli řidiče k eliminaci přetáčivého/nedotáčivého smyku.
7. Legislativa
Legislativa zohledňující elektrické pohony v osobních vozidlech je obecně značně
roztříštěná, přesto se však k této problematice několik předpisů a norem vyjadřuje. Vzhledem

- 53 -
k finanční náročnosti pořízení těchto dokumentů, nemůže být součástí této práce
podrobnější popsání samotného obsahu. V mých možnostech proto je pouze vypsat několik
základních dokumentů, které se problematikou zabývají. Legislativní stránkou elektromobilů
by se pak mohla například zabývat budoucí práce mých spolužáků. Následuje tedy přehled
legislativních dokumentů zabývajících se oblastí elektromobilů.
o ISO 6469-2:2001 Electric road vehicles - Safety specifications - Part 2: Functional
safety means and protection against failures
o ISO 6469-3:2001 Electric road vehicles - Safety specifications - Part 3: Protection
of persons against electric hazards
o ISO 8715:2001 Electric road vehicles -- Road operating characteristics
o EHK 100 Homologace bateriových elektrických vozidel z hlediska specifických
požadavků na konstrukci a na funkční bezpečnost
o ČSN EN 13447 Elektricky poháněná silniční vozidla – Terminologie
o ČSN EN 1821-1 Elektricky poháněná silniční vozidla - Silniční výkony - Měření
schopnosti provozu na silnici - Část 1: Elektrická vozidla
o ČSN EN 1821-2 Elektricky poháněná silniční vozidla - Měření schopnosti provozu
na silnici - Část 2: Hybridní tepelně elektrická vozidla
o ČSN EN 1986-1 Elektricky poháněná silniční vozidla - Měření energetických
vlastností - Část 1: Výhradně elektrická vozidla¨
o ČSN EN 1986-2 Elektricky poháněná silniční vozidla - Měření energetických
vlastností - Část 2: Hybridní elektrická vozidla s tepelným motorem
o ČSN EN 1987-1 Elektricky poháněná silniční vozidla - Zvláštní požadavky na
bezpečnost - Část 1: Skladování energie na vozidle
o ČSN EN 1987-2 Elektricky poháněná silniční vozidla - Zvláštní požadavky na
bezpečnost - Část 2: Prostředky funkční bezpečnosti a ochrana před poruchami
o ČSN EN 1987-3 Elektricky poháněná silniční vozidla - Zvláštní požadavky na
bezpečnost - Část 3: Ochrana uživatelů před elektrickými riziky
o ČSN EN 13444-1 Elektricky poháněná silniční vozidla - Měření emisí hybridních
vozidel - Část 1: Hybridní elektrická vozidla s tepelným motorem
o ČSN EN 12736 Elektricky poháněná silniční vozidla - Vnitřní hluk vozidla při
nabíjení vestavěným nabíječem - Stanovení hladiny akustického výkonu
o ČSN EN 15194 Jízdní kola - Jízdní kola s pomocným elektrickým pohonem -
Jízdní kola EPAC
o ČSN EN 50374 Montážní vozíky zavěšené na vodičích
o ČSN EN 61851-1 Systém nabíjení elektrických vozidel vodivým propojením - Část
1: Všeobecné požadavky

- 54 -
o ČSN EN 61851-21 Systém nabíjení elektrických vozidel vodivým propojením -
Část 21: Požadavky na elektrická vozidla pro vodivé připojení k AC/DC napájení
o ČSN EN 61851-22 Systém nabíjení elektrických vozidel vodivým propojením -
Část 22: AC nabíjecí stanice elektrického vozidla
8. Aktuální projekty a predikce budoucího vývoje
V této části bych rád popsal některé uskutečněné projekty a technologie, které se
danou problematikou zabývají a dovedly řešení až k praktické aplikaci. Situace ještě v roce
2005 se dala považovat za tristní, nicméně od té doby a obzvláště v posledním roce se
situace v dané problematice značně posunula kupředu. Proto vybírám několik
nejdotaženějších a nejslibnějších projektů za všechny.
8.1 Mitsubishi MiEV
Japonská firma Mitsubishi začala vyvíjet
nové technologie pro budoucí elektromobily jako
reakci na krizi na trhu s ropnými palivy a stále se
zpřísňující emisní nároky. Technologie MIEV
(Mitsubishi In-wheel motor Electric Vehicle)
neboli technologie elektromotoru v nábojích kol
byla vybrána jako správná cesta jak zatraktivnit
vozidla poháněná elektromotory pro širokou
veřejnost. In wheel motor technologie si japonská firma vyzkoušela již na konceptu Colt EV.
Tento první koncept má v zadních kolech umístěny motory o celkovém výkonu 20 kW a
točivém momentu 600 Nm, které dokážou 1150 kg těžký automobil rozjet až k maximální
rychlosti 150 km/h. Lithium-iontová baterie o rozměrech 194 mm x 175 mm x 116 mm (d/š/v)
obsahuje 22 modulů, má celkovou kapacitu 40 Ah, napětí 14,8 V a umožňuje Coltu EV
dojezd 150 km. [37] Na obrázku 6.1 je schematicky popsána koncepce tohoto vozidla. Úplně
vlevo je vyfocen nový zavazadlový prostor pod přední kapotou, který vzniknul po absenci
spalovacího motoru.

- 55 -
Obrázek 6.1 Technologie Mitsubishi MIEV [13]
Mitsubishi však trochu nepochopitelně zatím technologii MIEV nevyužil, a tak na
podzim roku 2009 se v Japonsku a později v Evropě a USA, začne prodávat zbrusu nový
elektromobil pojmenovaný Mitsubishi MiEV. Bude se prodávat ve dvou verzích. Jako
městské vozidlo a lehce sportovní automobil pro volný čas. O pohon se však bude
paradoxně starat jen jeden elektromotor pohánějící přes převodovku zadní kola.
8.2 Siemens eCorner
Německá firma siemens se kromě nového typu klínové brzdy EWB zabývá také
vývojem nových možností pohonů silničních dopravních prostředků. Projekt nazvaný
eCorner nabízí všechna řešení, které jsem popsal v předchozích částech. Princip popisuje
schéma na obrázku 6.2. Pod číslem 1 se skrývá klasický automobilový disk kola. Číslo dvě
pak označuje elektromotor s vnějším rotorem (princip popsán v předchozích kapitolách),
číslo tři je právě elektronická klínová brzda EWB, čtyři je tlumící a pružící jednotka a číslo pět
pak drive-by-wire řízení.

- 56 -
Obrázek 6.2 Siemens eCorner [29]
Bohužel se však v poslední době zdá, že firma siemens zatím další vývoj, natož
nějakou aplikaci této technologie do praxe, odložila, či úplně zrušila. Poslední zmínky o
tomto projektu, stejně tak o klínové brzdě EWB jsou více než dva roky staré. Je otázkou, zda
je za tím jen co nejvíce tajný vývoj nebo spíše úplné zastavení projektu z obavy o
rentabilnost vzhledem k celosvětové recesi na poli automobilových technologií. Necháme se
překvapit.
8.3 Michelin Active Wheel
Asi nejsofistikovanějším systémem
současnosti, který je ve fázi alespoň
fungujícího prototypu je prozatím jistě projekt
francouzské firmy Michelin. Jedná se o
„aktivní“ kolo, které ve svém středu integruje
všechny důležité soustavy klasického
vozidla, jako jsou pohonná jednotka, tlumící
a pružící elementy, řízení a brzdy. Vše tak,
jak bylo teoreticky popsáno v jedné z
předchozích kapitol. Výhodou nového řešení
od Michelinu je samozřejmě skutečnost, že se nesmírně šetří místem – elektromobil
nepotřebuje žádné místo pro motor, převodovku, diferenciál, odpružení, prostě nic, co známe

- 57 -
z běžného auta. Opět se tedy posunuje paradigma automobilu zcela novým směrem. Zbývá
mnohem více místa pro baterie, pasažéry, zavazadla. Auta mohou mít zcela neobvyklé tvary
a opět kufr vpředu i vzadu. [40] Tuto technologii Michaelin implementoval do přepracovaného
Opela Agila a v praxi předvedl jednoduchost aplikace. Na obrázku 6.3 můžeme vidět
konstrukční uspořádání. Příliš se neliší od předchozího projektu od firmy Siemens. Nedošlo
však k použití elektromotoru s vnějším rotorem, ale k zástavbě klasického elektromotoru,
který přenáší točivý moment na disk kola přes vnější převod. Je otázkou, nakolik se firmě
Michelin podaří tento nanejvýš slibný návrh prosadit do praxe. Spojení s firmou Valeo, lídrem
na poli nových ekologických technologií, však nasvědčuje, že by se to mohlo podařit.
Obrázek 6.3 Michelin active wheel [12]
Obrázek 6.4 Michelin active wheel – detail [12]

- 58 -
Více rozsáhlé obrazové dokumentace k tomuto velmi slibnému projektu lze nalézt na [42].
8.4 Volvo C30 ReCharge
To, že švédská
automobilka Volvo se aktivně
zapojuje do vývoje
nejsofistikovanějších
elektromobilních technologií asi
nikoho nepřekvapí. Švédsko je
známé svým vstřícným přístupem
k „zeleným“ ekologickým technologiím. Koncept C30 ReCharge je prototyp postaven na
podvozku konvenčního automobilu Volvo C30 využívající elektromotory ve všech kolech a
další nejnovější systémy. Jedná se o hybrid Využívající spalovací motor jen k dobíjení
baterií. Vozidlo tak kombinuje motor s objemem 1,6 se schopností spalovat směs benzinu a
bioetanolu (E85) a sadu elektromotorů umístěných přímo v kolech. Výsledek? Auto ujede
150 kilometrů na méně než dva litry benzinu.Po plném dobití je schopné „zelené Volvo“ ujet
100 kilometrů, a to jen s pomocí elektromotorů. Nabíjení má trvat tři hodiny. Zdrojem je
elektrická energie z běžné zásuvky. Volvo udává, že i rychlé zhruba hodinové nabití stačí na
ujetí přibližně padesáti kilometrů. Baterie typu Li-Pol se přitom v autě dobíjí i přímo za
provozu (ukládá se do ní například energie z brzdění). [36]
Schéma celého systému popisuje obrázek 6.5. V popisu od spodu zde najdeme:
Pneumatiky, permanentní magnety (součásti rotoru), rotor, elektromagnety (součást statoru),
přírubový disk (přichycení k zavěšení kola, nepohyblivá část), alternátor, baterie a spalovací
motor).

- 59 -
Obrázek 6.5 Koncept Volvo C30 ReCharge [36]
8.5 Lightning GT
Malá britská společnost představila
originální sportovní kupé, které svými výkony
fascinuje. Kupé je sice zatím ve fázi prototypu, ale i
tak je z hlediska techniky velmi zajímavé. Tento vůz
využívá stejných motorů ve všech čtyřech kolech
jako Volvo C30 Recharge. Vůz nemá žádné
konvenční brzdy a elektromotory využívá i k samotnému brzdění vozidla. To s sebou přináší
další úsporu hmotnosti. Lightning údajně na jedno nabití ujede až 300km, což spolu
s opravdu velmi nízkými provozními náklady dělá ve srovnání s konvenčními sportovními
vozy toto coupé velmi atraktivní. Použitá technologie i koncepce umožnila vznik velmi
zajímavému automobilu. Motory v kolech totiž nahrazují nejen brzdovou soustavu, ale
nevyžadují také žádné hnací hřídele, či převodovku. Automobil se ovládá pouze dvojicí
pedálů s nápisy plus (plyn) a minus (brzda). Ve srovnání se sportovnímu vozy dnešní doby
lze očekávat také mnohem menší provozní náklady. Použitá koncepce je současně plně
variabilním pohonem všech čtyř kol. Řídicí elektronika totiž může velmi přesně regulovat
velikost točivého momentu pro jednotlivá kola. Díky tomu by měla být zajištěna nejen
vynikající trakce, ale současně také neutrální chování v zatáčkách.
Kupé Lightning GT je zajímavou ukázkou možného budoucího vývoje elektricky poháněných
automobilů. Z představených technických specifikací se bezpochyby jedná o nesmírně
pokrokový vůz, otázkou však zůstává, jaká bude jeho opravdová funkčnost a použitelnost
v každodenním životě. [41]
Obrázek 6.6 Lightning GT – Autosalon Ženeva 2009

- 60 -
9. Závěr
Na konec této práce lze dodat, že systémy pohonu vozidel s elektromotory v nábojích
kol jsou v současné době jednou z prvních priorit vývojových oddělení všech světových firem
zabývající se elektromobily nebo ekologickými technologiemi obecně.
Celý systém přináší řadu výhod. Jsou to výhody pro konstruktéry – úspora místa či
hmotnosti, výhody pro firmy – zatraktivnění produkce, a zcela jistě postupně i finanční
úspory, ale především z této koncepce plynou samozřejmě výhody samotným uživatelům
vozidel. Automobil vybaven pohonem všech čtyř kol, pomocí elektromotorů integrovaných ve
středu kola spolu s dalšími systémy jako jsou řízení, brzdy, tlumení a pružení, je velmi
atraktivní pro každého uživatele. Jistější jízdní vlastnosti, nové možnosti designu exteriéru a
interiéru, více místa pro zavazadla i posádku, větší pasivní bezpečnost z důvodu integrace
rozsáhlejších deformačních zón.
Pohon všech kol by se mohl stát do budoucna standardním prvkem všech rodinných
vozů se všemi jeho výhodami. Stejně tak nové technologie brzd a odpružení vozidla přinesou
zcela jistě netradiční pohledy na konstrukci osobních vozidel. Například X-by-wire přinese
jistě velkou měrou značné zlepšení do oblasti aktivní bezpečnosti vozidel a také zajistí
maximální pohodlí pro posádku v ovládání vozidla. Městské parkování a manévrování
v úzkých prostorech měst nebo složitějším terénem by pro budoucí vozidla nemělo být
problémem. V případě elektronizace celého vozidla, kterou dozajista integrální celky v kolech
vozidla přinesou spolu se snahou omezit konvenční mechanické části, by komfort posádky
mohl dosáhnout vysokých hodnot.
Koncepce elektromobilu, o které pojednává tato práce, má samozřejmě několik
nevýhod. Tou největší je z hlediska dynamiky zhoršený komfort posádky a do jisté míry i
zhoršené jízdní vlastnosti vozidla a tedy aktivní bezpečnosti. Absencí konvenčních součástí
pohonu je úbytek hmotnosti značný, nicméně nárůst hodnot v množině neodpružených hmot
je zcela jistě nezanedbatelný. Tento problém však není zásadní a z příchodem lehkých
materiálů a vývojem nových elektromotorů se zčásti bude stírat. Za nevýhodu lze zcela jistě
v současné době považovat otázku legislativní a především otázku bezpečnosti. Nicméně je
tento problém spíše založen na nedůvěře zákazníků a jisté konvenčnosti současných
designérů a konstruktérů velkých automobilek. Několikanásobně zálohované elektronické
systémy řízení a letové stability například v letectví již fungují mnoho let bez nejmenších

- 61 -
problémů. To by mohlo být zárukou jisté spolehlivosti, vždyť v jakém odvětví se více dbá na
bezpečnost než právě v leteckém průmyslu?
Natáčení všech kol, aktivní pohon 4x4, nové typy elektronických brzd, sofistikované
stabilizační systémy či elektronické řízení zcela jistě změní pohled konstruktérů i uživatelů na
automobilovou techniku, a způsob osobní přepravy vůbec. Je jen otázkou, jak rychle se
vozidla s elektromotory v kolech dokáží uvést do sériové výroby a zda se prosadí díky svým
vlastnostem na vysoce-konkurenčním trhu s automobily. Úspěch by totiž značně pomohl
dalšímu vývoji a přinesl nové finanční prostředky a energii k rozšíření této technologie.

- 62 -
10. Seznam použité literatury
[1] Apetaur, M.: Automobilismus v 21. století. Vlastním nákladem., Ústí nad Labem 2001
[2] Kameš, J.: Alternativní pohon automobilů. BEN - technická literatura, Praha 2004
[3] Korbela, D.: Studie alternativních pohonů dopravních prostředku a jejich užití v praxi.
DP ČVUT FD, Praha 2007
[4] Kovanda, Resl, Socha: Konstrukce automobilů: Pérování vozidel. České vysoké
učení technické, Praha 1997
[5] Přikryl, J.: Pohon všech kol motorových vozidel a jeho vliv na jízdní vlastnosti. DP
ČVUT FD, Praha 2006
[6] VDI, Verlag: Batterie-, Brennstoffzellen-, und Hybrid-Fahrzeuge, Düsseldorf 1998
[7] Vlk, F.: Alternativní pohony motorových vozidel. Vlastním nákladem, Brno 2004
[8] Vlk, F.: Koncepce motorových vozidel :koncepce vozidel, alternativní pohony,
komfortní systémy, řízení dynamiky, informační systémy. Vlastním nákladem, Brno
2000
[9] Vlk, F.: Úlohy z dynamiky motorových vozidel . Vlastním nákladem, Brno 2001
[10] Vlk, F.: Automobilové technická příručka. Vlastním nákladem, Brno 2003
[11] Vlk, F.: Systémy řízení podvozku a komfortní systémy. Vlastním nákladem, Brno 2006
[12] Michelin active wheel, tiskový balíček – Motorshow, Paříž 2008
Internetové odkazy:
[13] http://www.mitsubishi-motors.com/corporate/about_us/technology/environment/e/miev.html
[14] http://www.jpmorgan.com/cm/Satellite?blobcol=urldata&blobheader=application%2Fpdf&blobk
ey=id&blobtable=MungoBlobs&blobwhere=1158469487609&ssbinary=true&blobheadername
1=Content-
disposition&blobheadervalue1=attachment;filename=Tackling_Greener_Auto_Regulations:_O
EMs_Use_Multi-Pronged_Approach_.pdf
[15] http://en.wikipedia.org/wiki/Lohner-Porsche
[16] http://home.zcu.cz/~formanek/mmvyuka/Data/mereni_rychlosti/prevodovka.htm
[17] http://www.hubmotors.com/

- 63 -
[18] http://www.autoblog.com/tag/electric+wheel+hub+motor/
[19] http://www.autoblog.com/2008/12/01/michelin-partners-with-chinese-firm-to-create-active-
wheel-syste/1#comments
[20] http://www.treehugger.com/files/2008/11/active-wheel-affordable-electric-car.php
[21] http://www.sadac.cz/sadev-prevodovka/
[22] http://www.ml-tuning.cz/download/katalog_ML-Tuning.pdf
[23] http://www.datis.cdrail.cz/edice/Zivpro/DZP7_07/solaris.pdf
[24] http://www.hybrid.cz/novinky/madrid-da-na-parkoviste-dobijecky-pro-elektromobily
[25] http://ekonomika.ihned.cz/c1-37541780-cez-planuje-zprovoznit-do-roku-2012-az-sto-
elektromobilu
[26] http://en.wikipedia.org/wiki/Drive_by_wire
[27] http://www.subaruplzen.cz/obrazy/technika/subaru_prilnavost.jpg
[28] http://www.motorauthority.com/michelins-active-wheel-technology-in-detail.html
[29] https://mall.automation.siemens.com/DE/guest/configurators/sd/sdFrameset.asp?urlParams=
PROD_ID=5Y&MLFB=&proxy=mall.automation.siemens.com&retURL=/DE/guest/index.asp?a
ktTab=5&lang=en&nodeID=1000000
[30] http://www.e-traction.com/index.htm
[31] http://electroauto.sweb.cz/
[32] http://www.euroekonom.cz/grafy-energie.html
[33] http://www.hybrid.cz
[34] http://elektromobily.wz.cz
[35] http://www.freedoniagroup.com/pdf/2108smwe.pdf
[36] http://news.auto.cz/frankfurt-2007/volvo-c30-recharge-nevhazujte-do-ohne.html
[37] http://www.tipcar.cz/mitsubishi-colt-ev-elektrina-budoucnosti-643.html
[38] http://www.jdpower.com/autos/]
[39] http://www.inovace-dmt.fs.cvut.cz/index.php?id=studijni_materialy
[40] (http://www.hybrid.cz/tagy/michelin-active-wheel
[41] http://www.automotorevue.cz/auto/predstavujeme/lightning-gt-elektricky-blesk.html
[42] ftp://81.255.116.206/Presse/MONDIAL%20DE%20L%27AUTO%202008/MICHELIN%20Activ
e%20Wheel/ Přihlašovací jméno: michelin , heslo: presse
[43] http://www.elektromobily.org/wiki/Legislativa_k_elektromobil%C5%AFm
[44] http://www.unece.org/trans/main/wp29/wp29regs/r100a1e.pdf - směrnice EHK 100 v angličtině

- 64 -
11. Seznam p říloh
11.1 Výkresová dokumentace
A. Schéma uložení elektromotoru VAR.I
B. Schéma rozložení sestavy VAR.I
C. Schéma uložení elektromotoru VAR.II
D. Schéma rozložení sestavy VAR.II
E. Schéma uložení elektromotoru VAR.III
F. Schéma rozložení sestavy VAR.III
G. Kinematická schémata jednotlivých konstruk čních variant
11.2 CD Médium