Robot: UR10
SN UR10:
SN CB2:
Informasjonen i dette dokumentet er Universal Robots A/S sin
eiendom og skal ikke gjengis helt eller delvis uten skriftlig
godkjenning fra Universal Robots A/S. Informasjonen i dette
dokumentet kan endres uten varsel, og skal ikke tolkes som en
forpliktelse fra Universal Robots A/S. Denne handboken blir
periodevis gjennomgatt og revidert.
Universal Robots A/S fraskriver seg ansvaret for feil og
utelatelser i dokumentet.
Opphavsrett c©2012, Universal Robots A/S
Universal Robots-logoen er et registrert varemerke tilhørende
Universal Robots A/S.
All Rights Reserved 2 UR10
Innhold
1.1.1 Roboten . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 6 1.1.2 Programmer . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 6 1.1.3 Sikkerhetsevaluering . . . . . . . .
. . . . . . . . . . . . . . . . . 7
1.2 Sla av og pa . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 7 1.2.1 Sla pa styreenheten . . . . . . . . . . .
. . . . . . . . . . . . . . 7 1.2.2 Sla pa roboten . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 7 1.2.3 Initialisering av
roboten . . . . . . . . . . . . . . . . . . . . . . . 7 1.2.4 Sla
av roboten . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7 1.2.5 Sla av styreenheten . . . . . . . . . . . . . . . . . . . .
. . . . . 8
1.3 Hurtigstart, trinn for trinn . . . . . . . . . . . . . . . . .
. . . . . . . . . . 8 1.4 Monteringsinstruksjoner . . . . . . . . .
. . . . . . . . . . . . . . . . . . 9
1.4.1 Arbeidsomradet til roboten . . . . . . . . . . . . . . . . .
. . . . 10 1.4.2 Montering av roboten . . . . . . . . . . . . . . .
. . . . . . . . . 10 1.4.3 Montering av verktøyet . . . . . . . . .
. . . . . . . . . . . . . . 10 1.4.4 Montering av styreenheten . .
. . . . . . . . . . . . . . . . . . . 10 1.4.5 Montering av
læringsdelen . . . . . . . . . . . . . . . . . . . . . 10 1.4.6
Tilkobling av robotkabelen . . . . . . . . . . . . . . . . . . . .
. 13 1.4.7 Tilkobling av nettkabelen . . . . . . . . . . . . . . .
. . . . . . . 13
2 Elektrisk grensesnitt 15 2.1 Innledning . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 15 2.2 Viktig merknad .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.3 Sikkerhetsgrensesnittet . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 16
2.3.1 Nødstoppgrensesnittet . . . . . . . . . . . . . . . . . . . .
. . . 16 2.3.2 Vernegrensesnittet . . . . . . . . . . . . . . . . .
. . . . . . . . . 19 2.3.3 Automatisk fortsettelse etter vernestopp
. . . . . . . . . . . . . 20
2.4 I/U for styreenhet . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 21 2.4.1 Digitale utganger . . . . . . . . . . .
. . . . . . . . . . . . . . . . 22 2.4.2 Digitale innganger . . . .
. . . . . . . . . . . . . . . . . . . . . . 23 2.4.3 Analoge
utganger . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.4.4 Analoge innganger . . . . . . . . . . . . . . . . . . . . . .
. . . 25
2.5 Verktøy-I/U . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 26 2.5.1 Digitale utganger . . . . . . . . . . .
. . . . . . . . . . . . . . . . 27 2.5.2 Digitale innganger . . . .
. . . . . . . . . . . . . . . . . . . . . . 28 2.5.3 Analoge
innganger . . . . . . . . . . . . . . . . . . . . . . . . .
28
3 Sikkerhet 31 3.1 Innledning . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 31 3.2 Lovbestemt dokumentasjon . .
. . . . . . . . . . . . . . . . . . . . . . 31 3.3 Risikovurdering
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
3
Innhold
4 Garantier 35 4.1 Produktgaranti . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 35 4.2 Ansvarsfraskrivelse . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 35
5 Sammenstillingserklæring 37 5.1 Innledning . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 37 5.2
Produktprodusent . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . 37 5.3 Person autorisert til a utarbeide den tekniske
dokumentasjonen . . 37 5.4 Beskrivelse og identifikasjon av produkt
. . . . . . . . . . . . . . . . . . 37 5.5 Vesentlige krav . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 5.6
Kontaktinformasjon for nasjonale myndigheter . . . . . . . . . . .
. . 40 5.7 Viktig merknad . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 40 5.8 Sted og dato for erklæringen . . . . .
. . . . . . . . . . . . . . . . . . 40 5.9 Identitet og signatur
for autorisert person . . . . . . . . . . . . . . . . 40
A Sertifiseringer 41
Kapittel 1
Gratulerer med kjøpet av din nye universelle robot, UR10.
Roboten er en maskin som kan programmeres til a bevege et verktøy
og kommunisere med andre maskiner ved hjelp av elektriske signaler.
Ved hjelp av vart patenterte programmeringsgrensesnitt, PolyScope,
er det enkelt a pro- grammere roboten til a flytte verktøyet langs
en ønsket bane. PolyScope er be- skrevet i brukerveiledningen til
PolyScope.
Leseren av denne brukerveiledningen forventes a ha teknisk innsikt,
være kjent med grunnleggende generelle konsepter for programmering,
kunne koble en ledning til en skrueklemme og bore hull i en
metallplate. Det kreves ingen spesiell kunnskap om roboter generelt
eller universelle roboter spesielt.
Resten av dette kapitlet er en innledning for a komme i gang med
roboten.
5
1.1. Innledning
1.1.1 Roboten
Roboten er i seg selv en arm som bestar av ekstruderte rør og ledd
av alumi- nium. Leddene har navnene A:Base, B:Skulder, C:Albue og
D, E, F:Handledd 1,2,3. Basen er der hvor roboten er montert, og i
den andre enden er Handledd 3) verktøyet til roboten festet. Ved a
koordinere bevegelsen til hvert av ledde- ne kan roboten bevege
verktøyet fritt, med unntak av omradet direkte over og under
roboten, og selvfølgelig begrenset til rekkevidden til roboten
(1300mm fra senter til base).
1.1.2 Programmer
Et program er en liste med kommandoer som forteller roboten hva den
skal gjøre. Brukergrensesnittet PolyScope, beskrevet i
brukerveiledningen til PolySco- pe, gjør det mulig for personer med
bare litt programmeringserfaring a program- mere roboten. For de
fleste oppgaver kan programmeringen utføres helt ved hjelp av
berøringspanelet uten at det skrives inn noen kryptiske
kommandoer.
Siden verktøy i bevegelse er en sa viktig del av et robotprogram,
er det ve- sentlig a lære roboten hvordan den skal bevege seg. I
PolyScope er bevegelse- ne til verktøyet gitt ved a bruke en rekke
vendepunkter. Hvert vendepunkt er et punkt i robotens
arbeidsomrade.
Vendepunkter
Et vendepunkt er et punkt i robotens arbeidsomrade. Et vendepunkt
kan angis ved a flytte roboten til en viss posisjon eller kan
beregnes av programvare. Robo- ten utfører en oppgave ved a bevege
seg gjennom en sekvens av vendepunk- ter. Ulike alternativer
angaende hvordan roboten beveger seg mellom vende- punktene kan gis
i programmet.
Definere vendepunkter, bevege roboten. Den enkleste maten a
definere et vendepunkt pa er a flytte roboten til ønsket posisjon.
Dette kan gjøres pa to mater: 1) Ved a dra i roboten mens knappen
Læringpa berøringsskjermen hol- des inne (se brukerveiledningen til
PolyScope). 2) Ved a bruke berøringsskjermen for a kjøre verktøyet
lineært eller kjøre hvert ledd individuelt.
Blandinger Som standard stopper roboten ved hvert vendepunkt. Ved a
gi ro- boten frihet til a avgjøre hvordan den skal bevege seg i
nærheten av vende- punktet er det mulig a kjøre gjennom ønsket bane
raskere uten a stoppe. Denne friheten gis ved a angi en
blandingsradius for vendepunktet, som betyr at nar roboten kommer
innenfor en viss avstand til vendepunktet, kan den avgjøre om den
skal avvike fra banen. En blandingsradius pa 5–10 cm gir vanligvis
gode resultater.
All Rights Reserved 6 UR10
1.2. Sla av og pa
Funksjoner
I tillegg til a bevege seg mellom vendepunktene, kan programmet
sende I/U- signaler til andre maskiner ved visse punkter i robotens
bane og utføre komman- doer som hvis...sa og sløyfe, basert pa
variabler og I/U-signaler.
1.1.3 Sikkerhetsevaluering
Roboten er en maskin og derfor kreves en sikkerhetsevaluering for
hver installa- sjon av roboten. Kapittel 3.1 beskriver hvordan du
utfører en sikkerhetsvurdering.
1.2 Sla av og pa
Hvordan de ulike delene av robotsystemet slas av og pa, beskrives i
de neste avsnittene.
1.2.1 Sla pa styreenheten
Styreenheten slas pa ved at du trykker pa strømknappen foran pa
læringsdelen. Nar styreenheten er slatt pa, vises masse tekst pa
skjermen. Etter ca. 20 sekun- der vises Universal Robots sin logo,
sammen med teksten Laster”. Etter ca. 40 sekunder vises noen
knapper pa skjermen, og en popup tvinger brukeren til a ga til
initialiseringsskjermen.
1.2.2 Sla pa roboten
Roboten kan slas pa hvis styreenheten er slatt pa, og hvis alle
nødstoppknappene ikke er aktivert. Man slar pa roboten i
initialiseringsskjermen ved a berøre PA- knappen pa skjermen og
deretter trykke pa Start”. Nar en robot startes, høres lyden av
bremsene som frigjøres. Nar roboten er slatt pa, ma den
initialiseres før den kan begynne a arbeide.
1.2.3 Initialisering av roboten
Nar roboten er slatt pa, ma alle robotleddene finne sin nøyaktige
posisjon. For a fa til det ma leddene beveges. Antall nødvendige
bevegelser avhenger av leddposisjon og type. Sma ledd ma flytte
mellom 22,5 og 45, store ledd ma bevege seg halvparten sa stort,
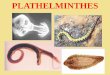
rotasjonsretningen er ikke viktig. Initialiserings- skjermen, vist
i figur 1.1, gir tilgang til manuell og halvautomatisk kjøring av
ro- botens ledd. Roboten kan ikke automatisk unnga kollisjon med
seg selv eller omgivelsene under denne prosessen. Derfor ma man
være forsiktig.
Auto-knappen øverst i skjermen kjører alle leddene til de er klare.
Nar de er sluppet opp og trykket inn igjen, endrer alle leddene
kjøreretning. Manuell- knappene muliggjør manuell kjøring av hvert
ledd.
En mer detaljert beskrivelse av initialiseringsskjermen finnes i
brukerveilednin- gen til PolyScope.
1.2.4 Sla av roboten
Strømmen til roboten kan slas av ved a trykke pa ”AVknappen pa
initialiserings- skjermen. De fleste brukere trenger ikke denne
funksjonen siden roboten slas av automatisk nar styreenheten slas
av.
All Rights Reserved 7 UR10
1.3. Hurtigstart, trinn for trinn
Figur 1.1: Initialiseringsskjermen
1.2.5 Sla av styreenheten
Sla av systemet ved a trykke pa den grønne knappen pa skjermen,
eller ved a bruke Sla avknappen pa velkomstskjermen.
Hvis du slar av ved a trekke ut veggkontakten, kan det føre til
korrumpering av filsystemet til roboten, som igjen kan føre til
funksjonsfeil.
1.3 Hurtigstart, trinn for trinn
Følg disse trinnene for hurtigkonfigurasjon av roboten:
1. Pakk ut roboten og styreenheten.
2. Monter roboten pa et solid underlag.
3. Plasser styreenheten pa foten til roboten.
4. Plugg robotkabelen inn i tilkoblingspunktet nederst pa
styreenheten.
5. Plugg inn nettilkoblingen til styreenheten.
6. Trykk pa nødstoppknappen foran pa læringsdelen.
7. Trykk pa strømknappen pa læringsdelen.
8. Vent mens systemet starter opp, til det viser tekst pa
berøringsskjermen.
9. Nar systemet er klart, vises en popup pa berøringsskjermen som
sier at nødstoppknappen er trykket inn.
10. Trykk pa OK-knappen pa popup-meldingen.
11. Las opp nødstoppknappene. Robotens tilstand endres fra
Nødsituasjon stoppettil Sla av robot”.
All Rights Reserved 8 UR10
1.4. Monteringsinstruksjoner
12. Trykk pa Pa-knappen pa berøringsskjermen. Vent noen
sekunder.
13. Trykk pa Start-knappen pa berøringsskjermen. Roboten lager na
en lyd og beveger seg litt mens den laser opp bremsene.
14. Trykk pa de bla pilene og flytt leddene rundt til hver lampe pa
høyre side av skjermen lyser grønt. Pass pa ikke a kjøre roboten
inn i seg selv eller noe annet.
15. Alle leddene er na OK. Trykk pa OK-knappen, som tar deg til
velkomst- skjermbildet.
16. Trykk pa PROGRAM Robot-knappen og velg Tomt program.
17. Trykk pa Neste-knappen (nederst til høyre) slik at den
<tomme> linjen er valgt i trestrukturen pa venstre side av
skjermen.
18. Ga til kategorien Struktur.
19. Trykk pa Flytt-knappen.
21. Trykk pa Neste-knappen for a ga til
Vendepunkt-innstillinger.
22. Trykk pa Angi dette vendepunktet-knappen ved siden av
"?"-bildet.
23. Pa Flytte-skjermen flyttes roboten ved at du trykker pa de
ulike bla pilene, eller ved at du holder inne knappen Læring,
plassert pa læringsdelens bakside, mens man trekker i
robotarmen.
24. Trykk OK.
26. Trykk pa Angi dette vendepunktet-knappen ved siden av
"?"-bildet.
27. Pa Flytte-skjermen flyttes roboten ved at du trykker pa de
ulike bla pilene, eller ved at du holder inne knappen Læring,
plassert pa læringsdelens bakside, mens man trekker i
robotarmen.
28. Trykk OK.
29. Programmet er klart. Roboten vil bevege seg mellom de to
punktene nar du trykker pa Playsymbolet. Hold avstand, hold pa
nødstoppknappen og trykk pa Play”.
30. Gratulerer! Na har du opprettet ditt første robotprogram som
beveger ro- boten mellom de to angitte posisjonene. Husk at du ma
utføre en risikovur- dering og forbedre den generelle sikkerheten
før du setter roboten i arbeid.
1.4 Monteringsinstruksjoner
Roboten bestar i hovedsak av seks robotledd og to aluminiumsrør som
kobler robotens base sammen med robotens verktøy. Roboten er bygd
slik at verktøyet kan overføres og roteres innen robotens
arbeidsomrade. De neste avsnittene beskriver de grunnleggende
tingene man bør vite ved montering av de ulike delene av
robotsystemet.
All Rights Reserved 9 UR10
1.4. Monteringsinstruksjoner
Front Vippet
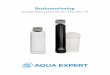
Figur 1.2: Robotens arbeidsomrade. Roboten kan arbeide i en sfære
(Ø260 cm) rundt basen, bortsett fra et sylindrisk volum direkte
over og under robotbasen.
1.4.1 Arbeidsomradet til roboten
Arbeidsomradet til robot UR10 strekker seg 1300 mm fra baseleddet.
Arbeids- omradet til roboten vises i figur 1.2. Det er viktig a
hensyn til det sylindriske volu- met direkte over og under
robotbasen nar man velger monteringssted for robo- ten. Man bør om
mulig unnga a flytte verktøyet for nært det sylindriske volumet
fordi det fører til at robotleddene beveger seg raskt selv om
verktøyet beveger seg sakte.
1.4.2 Montering av roboten
Roboten monteres med fire M8-bolter, og de fire 8, 5mm-hullene pa
robotbasen. Det anbefales a stramme disse boltene med 20 Nm
dreiemoment. Hvis man ønsker en svært nøyaktig reposisjonering av
roboten, er det to Ø8-hull for bruk av stift. Et nøyaktig
basemotstykke kan kjøpes som tilbehør. Figur 1.3 viser hvor du skal
bore hull og montere skruene.
1.4.3 Montering av verktøyet
Verktøyflensen til roboten har fire hull til a feste verktøy til
roboten. En tegning av verktøyflensen vises pa figur 1.4.
1.4.4 Montering av styreenheten
Styreenheten kan henges pa veggen eller plasseres pa gulvet. En
klaring pa 50 mm pa hver side gir tilstrekkelig luftstrøm.
1.4.5 Montering av læringsdelen
Læringsdelen kan henges pa veggen eller pa styreenheten. Ekstra
tilbehør kan leveres.
All Rights Reserved 10 UR10
1.4. Monteringsinstruksjoner
0,05
Figur 1.3: Hull for montering av roboten, 1:2 skala. Bruk fire
M8-bolter. Alle mal er i mm.
All Rights Reserved 11 UR10
1.4. Monteringsinstruksjoner
4x 90°
4x M
6 6
All Rights Reserved 12 UR10
1.4. Monteringsinstruksjoner
1.4.6 Tilkobling av robotkabelen
Kabelen fra roboten ma kobles til tilkoblingen ved knappen pa
styreenheten. Pass pa at tilkoblingen sitter skikkelig. Tilkobling
og frakobling av robotkabelen kan bare gjøres nar roboten slatt
av.
1.4.7 Tilkobling av nettkabelen
Nettkabelen fra styreenheten har en standard IEC-plugg i enden.
Koble en land- spesifikk nettplugg eller -kabel til
IEC-pluggen.
Hvis yteevnen til den spesifikke pluggen er utilstrekkelig eller
hvis en mer per- manent løsning er a foretrekke, koble
styringsenheten direkte. Nettilkoblingen skal være utstyrt med
følgende som minimum:
1. Hovedsikring
2. Reststrømenhet
3. Jordforbindelse
Nettstrømspesifikasjoner vises under.
Parameter Min. Type Maks. Enhet Inngangsspenning 100 - 240 VAC
Ekstern hovedsikring (@ 100-200 V) 15 - 16 A Ekstern hovedsikring
(@ 200-240 V) 8 - 16 A Inngangsfrekvens 47 - 63 Hz Standby-strøm -
- 0,5 W Nominell driftseffekt 90 250 500 W
Bruk skrueforbindelsen merket med jordsymbol inne i styringsenheten
nar po- tensialutligning med andre maskiner er nødvendig.
All Rights Reserved 13 UR10
1.4. Monteringsinstruksjoner
Kapittel 2
Elektrisk grensesnitt
2.1 Innledning
Roboten er en maskin som kan programmeres til a flytte et verktøy
rundt i robo- tens arbeidsomrade. Ofte er det ønskelig a samordne
robotens bevegelser med nærliggende maskiner eller utstyr pa
verktøyet. Den enkleste maten a oppna dette pa er ofte ved hjelp av
det elektriske grensesnittet.
Det er elektriske inngangs-/utgangssignaler (I/U) inne i
styreenheten og robot- verktøyflensen. Dette kapitlet forklarer
hvordan du kobler utstyret til inn-/utganger. Noen av
inn-/utgangene i styreenheten er beregnet pa robotens
sikkerhetsfunk- sjonalitet, og noen gjelder generelle inn-/utganger
for tilkobling til andre ma- skiner og utstyr. Den generelle
inn-/utgangen kan manipuleres direkte pa I/U- kategorien i
brukergrensesnittet, se brukerveiledningen til PolyScope, eller av
ro- botprogrammene.
For a skaffe til veie ekstra I/U kan Modbus-enheter legges til via
den ekstra Ethernet-kontakten i styreenheten.
2.2 Viktig merknad
Merk at i henhold til IEC 61000 og EN 61000-standarder skal ikke
kabler som gar fra styreenheten til andre maskiner og fabrikkutstyr
være lenger enn 30 m, hvis ikke det er foretatt utførlige
tester.
Merk at hver minustilkobling (0 V) er referert til som GND, og er
koblet til skjermen pa roboten og styreenheten. Men alle nevnte
GND-tilkoblinger er bare til strømtilførsel og signalisering. For
PE (vernejording) brukes en av de to M6-skrueforbindelsene inne i
styreenheten. Dersom FE (funksjonell jording) er nødvendig, brukes
en av M3-skruene nær skrueklemmene.
Merk at i dette kapitlet er alle uspesifiserte spennings- og
strømdata angitt som likestrøm.
Det er generelt viktig a holde sikkerhetsrelaterte
grensesnittsignaler atskilt fra ordinære I/U-grensesnittsignaler. I
tillegg bør sikkerhetsgrensesnittet aldri være koblet til en PLS
som ikke er en sikkerhets-PLS med riktig sikkerhetsniva. Hvis den-
ne regelen ikke følges, er det ikke mulig a oppna et høyt
sikkerhetsniva fordi en feil i normal I/U kan forhindre at et
sikkerhetsstoppsignal fører til en sikkerhets- stopp.
15
AG AO0
AG AO1
Inne i styreenheten er det et panel med skrueklemmer. Delen lengst
til venst- re, i svart ovenfor, er sikkerhetsgrensesnittet.
Sikkerhetsgrensesnittet kan brukes til a koble roboten til andre
maskiner eller verneutstyr for a sikre at robotene stop- per i
visse situasjoner.
Sikkerhetsgrensesnittet bestar av to deler; nødstoppgrensesnittet
og vernest- oppgrensesnittet. Dette er nærmere beskrevet i de
følgende avsnittene. I tabel- len nedenfor er forskjellene
oppsummert:
Nødstopp Vernestopp Robot slutter a bevege seg Ja Ja Initieringer
Manuell Manuell eller automatisk Programkjøring Stopper Avbrudd
Bremser Aktiv Ikke aktiv Motoreffekt Av Begrenset Tilbakestill
Manuell Automatisk eller manuell Bruksfrekvens Sjelden Hver syklus
til sjelden Krever ny initialisering Kun bremsefrigivelse Nei
EN/IEC 60204 og NFPA 79 Stoppkategori 1 Stoppkategori 2 Ytelsesniva
ISO 13849-1 PLd ISO 13849-1 PLd
2.3.1 Nødstoppgrensesnittet
[TA] Testutgang A [TB] Testutgang B [EO1] Nødstopputgang,
forbindelse 1 [EO2] Nødstopputgang, forbindelse 2 [EO3]
Nødstopputgang, forbindelse 3 [EO4] Nødstopputgang, forbindelse 4
[EA] Robotens nødstoppinngang A (positiv) [EB] Robotens
nødstoppinngang B (negativ) [EEA] Ekstern nødstoppinngang A
(positiv) [EEB] Ekstern nødstoppinngang B (negativ) [24V] +24V
mateforbindelse for sikkerhetsanordninger [GND] 0 V mateforbindelse
for sikkerhetsanordninger
Nødstopp-grensesnittet har to innganger, robotens nødstoppinngang
og eks- tern nødstoppinngang. Hver inngang er doblet av hensyn til
redundans pa grunn av sikkerhetsnivaet d.
Robotens nødstoppgrensesnitt stopper roboten, og stiller inn
nødstopputgangen, beregnet for bruk av sikkerhetsutstyr i nærheten
av roboten. Eksternt nødstopp vil ogsa stoppe roboten, men vil ikke
pavirke nødstopputgangen og er kun be- regnet for tilkobling til
andre maskiner.
All Rights Reserved 16 UR10
2.3. Sikkerhetsgrensesnittet
24V 24V 24V
EA EB EEA EEB
TA TB TA TB
TA TB A R
TA TB A R
TA TB A R
TA TB A R
E01 E02 E03 E04
EA EB EEA EEB
TA TB TA TB
Den enkleste konfigurasjonen er a bruke den interne nødstoppknappen
som den eneste komponenten til a generere en nødstopp. Dette gjøres
med konfi- gurasjonen som vises ovenfor. Denne konfigurasjonen er
standard nar roboten forlater fabrikken, og roboten er derfor klar
til drift. Nødstoppkonfigurasjonen bør imidlertid endres hvis det
kreves av risikovurderingen.
Tilkobling av en ekstern nødstoppknapp
E01 E02 E03 E04
EA EB EEA EEB
TA TB TA TB
I nesten alle bruksomrader for roboten er det nødvendig a koble til
en eller flere eksterne nødstoppknapper. Det er enkelt. Det er et
eksempel pa hvordan man kobler til en ekstra knapp ovenfor.
Koble nødstopp til andre maskiner
Nar roboten brukes sammen med annet elektromekanisk maskineri, er
det ofte pakrevd a sette opp en felles nødstoppkrets. Dette sørger
for at operatøren ikke trenger a tenke pa hvilken knapp som skal
brukes dersom det oppstar en farlig situasjon. Det er ogsa ofte
bedre at alle delene av en delfunksjon i en produktlinje er
synkronisert, siden et stopp i bare en del av linjen kan føre til
en farlig situasjon.
Nedenfor vises det et eksempel med to UR-roboter som foretar
nødstopp pa hverandre.
E01 E02 E03 E04
EA EB EEA EEB
EA EB EEA EEB
TA TB TA TB
A B
Nedenfor vises det et eksempel der flere UR-roboter deler en
nødstoppfunksjon. Koble til flere roboter pa samme mate som robot
2.
Dette eksemplet benytter 24 V, noe som fungerer med mange andre
maski- ner. Pass pa a følge alle elektriske spesifikasjoner nar
UR-roboter deler nødstopp med annet maskineri.
All Rights Reserved 17 UR10
2.3. Sikkerhetsgrensesnittet
EA EB EEA EEB
EA EB EEA EEB
EA EB EEA EEB
TA TB TA TB
24V 24V GND GND
Elektriske spesifikasjoner
Et forenklet internskjema for kretsen er vist nedenfor. Det er
viktig a merke seg at eventuell kortslutning eller tapt forbindelse
vil føre til en sikker stopp, sa lenge det bare oppstar en feil om
gangen. Feil og unormal funksjon i releer og strømtilførsel fører
til en feilmelding i robotloggen og forhindrer at roboten slas
pa.
TA TB
Nedenfor: Spesifikasjoner av nødstoppgrensesnittet.
Parameter Min. Type Maks. Enhet [TA-TB] Spenning 10,5 12 12,5 V
[TA-TB] Strøm (hver utgang) - - 120 mA [TA-TB] Kortslutningsvern -
400 - mA [EA-EB][EEA-EEB] Inngangsspenning -30 - 30 V
[EA-EB][EEA-EEB] Garantert AV hvis -30 - 7 V [EA-EB][EEA-EEB]
Garantert PA hvis 10 - 30 V [EA-EB][EEA-EEB] Garantert AV hvis 0 -
3 mA [EA-EB][EEA-EEB] PA strøm (10-30V) 7 - 14 mA
[EO1-EO2][EO3-EO4] Kontaktstrøm AC / DC 0,01 - 6 A
[EO1-EO2][EO3-EO4] Kontaktspenning DC 5 - 50 V [EO1-EO2][EO3-EO4]
Kontaktspenning AC 5 - 250 V
Merk at antall sikkerhetskomponenter som skal brukes og hvordan de
skal fun- gere, avhenger av risikovurderingen, som er forklart i
denne delen 3.1.
Merk at det er viktig a utføre regelmessige kontroller av
sikkerhetsstoppfunksjo- naliteten for a sikre at alle
sikkerhetstoppinnretningene fungerer korrekt.
De to nødstoppinngangene EA-EB og EEA-EEB er potensialfrie
innganger i samsvar med IEC 60664-1 og EN 60664-1,
forurensningsgrad 2, overspenningska- tegori II.
Nødstopputgangene EO1-EO2-EO3-EO4 er relekontakter i samsvar med
IEC 60664-1 og EN 60664-1, forurensningsgrad 2,
overspenningskategori III.
All Rights Reserved 18 UR10
2.3. Sikkerhetsgrensesnittet
2.3.2 Vernegrensesnittet
[TA] Testutgang A [TB] Testutgang B [SA] Sikker stoppinngang A
(positiv) [SB] Vernestoppinngang B (negativ) [A] Automatisk
fortsettelse etter vernestopp [R] Tilbakestill vernestopp [24V]
+24V mateforbindelse for sikkerhetsanordninger [GND] 0 V
mateforbindelse for sikkerhetsanordninger
Vernegrensesnittet brukes til a stanse robotens bevegelse pa en
sikker mate. Vernegrensesnittet kan brukes til lysporter,
dørbrytere, sikkerhets-PLS osv. Gjen- opptagelse fra et vernestopp
kan skje automatisk eller styres av en trykknapp, avhengig av
konfigurasjonen av vernestoppet. Hvis vernegrensesnittet ikke er i
bruk, aktiveres automatisk tilbakestillingsfunksjonalitet som
beskrevet i avsnitt 2.3.3.
Koble til en dørbryter
TA TB A R
Tilkobling til en dørbryter eller tilsvarende gjøres som vist
ovenfor. Husk a bruke en konfigurasjon med tilbakestillingsknapp
hvis roboten ikke skal starte automa- tisk nar døren er lukket
igjen.
Koble til en lysport
TA TB A R
Hvordan man kobler til en lysport er vist ovenfor. Det er ogsa
mulig a bruke en lysport i kategori 1 (ISO 13849-1 og EN 954-1)
hvis risikovurderingen tillater det. Nar du kobler en lysport av
kategori 1, bruker du TA og SA, og deretter tilkobles TB og SB med
en kabel. Husk a bruke en konfigurasjon med tilbakestillingsknapp
slik at vernestoppet blir last.
All Rights Reserved 19 UR10
2.3. Sikkerhetsgrensesnittet
TA TB A R
Hvordan man kobler til en tilbakestillingsknapp er vist ovenfor. En
permanent inntrykket tilbakestillingsknapp er ikke tillatt. Hvis
tilbakestillingsknappen sitter fast, utløses en sikker stopp, og en
feilmelding vises pa loggskjermbildet.
2.3.3 Automatisk fortsettelse etter vernestopp
24V 24V GND GND SA SB A R
TA TB A R
Sikkerhetsgrensesnittet kan nullstille seg selv nar en sikker
stopp-hendelse er passert. Hvordan man kobler til en
tilbakestillingsfunksjon er vist ovenfor. Dette er ogsa den
anbefalte konfigurasjonen hvis sikkerhetsgrensesnittet ikke er
brukt. Det er imidlertid ikke anbefalt a bruke automatisk
tilbakestilling hvis en konfigu- rasjon med tilbakestillingsknapp
er mulig. Automatisk tilbakestilling er beregnet for spesielle
installasjoner og installasjoner med andre maskiner.
Elektriske spesifikasjoner
For a forsta sikkerhetsfunksjonaliteten vises et forenklet skjema
av kretsene neden- for. Eventuelle feil i sikkerhetssystemet vil
føre til sikker stopp av roboten og en feilmelding pa
loggskjermbildet.
1011
2.4. I/U for styreenhet
Parameter Min. Type Maks. Enhet 24V spenningstoleranse -15% - +20%
- Strøm leveres fra 24V tilførsel - - 1,2∗ A Overbelastningsvern -
1,4 - A [TA-TB][A↑][R↑] Spenning 10,5 12 12,5 V [TA-TB][A↑][R↑]
Strøm - - 120 mA [TA-TB][A↑][R↑] Kortslutningsvern - 400 - mA
[SA-SB] Inngangsspenning -30 - 30 V [SA-SB] Garantert AV hvis -30 -
7 V [SA-SB] Garantert PA hvis 10 - 30 V [SA-SB] Garantert AV hvis 0
- 3 mA [SA-SB] PA strøm (10-30V) 7 - 14 mA [A↓][R↓]
Inngangsspenning -30 - 30 V [A↓][R↓] Inngang garantert AV hvis -30
- 7 V [A↓][R↓] Inngang garantert PA hvis 10 - 30 V [A↓][R↓]
Garantert AV hvis 0 - 5 mA [A↓][R↓] PA strøm (10-30V) 6 - 10
mA
Vernestoppinngang SA-SB er en potensialfri inngang i samsvar med
IEC 60664- 1 og EN 60664-1, forurensningsgrad 2,
overspenningskategori II. Merk at gule 24 V-tilkoblinger har
tilførsel fra samme interne 24 V-regulator som 24 V-tilkoblingene
til de normale inn-/utganger, og at maksimalverdien pa 1,2 A
gjelder for begge strømkildene under ett.
2.4 I/U for styreenhet
24V 24V GND GND
E01 E02 E03 E04
SA SB A R
TA TB A R
GND GND GND GND
24V 24V DO0 DO1
GND GND GND GND
DO2 DO3 DO4 DO5
GND GND DI0 DI1
DO6 DO7 24V 24V
DI2 DI3 DI4 DI5
24V 24V 24V 24V
DI6 DI7 A0- AO+
24V 24V A1- A1+
EA EB EEA EEB
TA TB TA TB
AG AO0
AG AO1
Inne i styreenheten er det et panel med skrueklemmer med ulike I/U
som vist ovenfor. Høyre del av dette panelet er generelle
inn-/utganger.
[24V] +24V mateforbindelse [GND] 0 V mateforbindelse [DOx] Digital
utgang nummer x [DIx] Digital inngang nummer x [AOx] Analog utgang
nummer x pluss [AG] Analog utgang GND [Ax+] Analog inngang nummer x
pluss [Ax-] Analog inngang nummer x minus
I/U-panelet i styreenheten har 8 digitale og 2 analoge innganger, 8
digitale og 2 analoge utganger og en innebygd 24 V strømforsyning.
Digitale innganger og utganger er pnp-teknologi og er konstruert i
samsvar med IEC 61131-2 og EN 61131-2. 24V og GND kan brukes som
inngang til I/U-modul eller utgang som en 24 V strømforsyning. Nar
styreenheten starter, kontrollerer den om det ligger spenning pa 24
V-tilkoblingen fra ekstern strømforsyning, og hvis ikke kobler den
automatisk inn den interne 24 V-strømforsyningen.
All Rights Reserved 21 UR10
2.4. I/U for styreenhet
Elektriske spesifikasjoner for den interne strømforsyningen
Parameter Min. Type Maks. Enhet Intern 24 V spenningstoleranse -15%
- +20% -
Strøm fra intern 24 V tilførsel - - 1,2∗ A Overbelastningsvern -
1,4 - A
Ekstern strømforsyningsspenning 10 - 30 V
Merk at 24 V vernetilkoblinger (gule) har tilførsel fra samme
interne 24 V-regulator som 24 V-tilkoblingene til de normale I/U,
og at maksimalverdi pa 1,2 A gjelder for begge strømkildene til
sammen.
Dersom den naværende belastningen pa den interne 24
V-strømforsyningen overskrides, vises en feilmelding pa
loggskjermen. Strømforsyningen vil automa- tisk forsøke
gjenoppretting etter noen sekunder.
2.4.1 Digitale utganger
Parameter Min. Type Maks. Enhet Kildestrøm per utgang 0 - 2 A
Kildestrøm for alle utganger sammen 0 - 4 A Spenningsfall ved PA 0
- 0,2 V
Lekkasjestrøm ved OFF 0 0 - 0,1 mA
Utgangene kan brukes til a drive utstyret direkte, f.eks.
pneumatiske releer, eller de kan brukes til kommunikasjon med andre
PLS-systemer. Utgangene er konstruert i samsvar med alle tre typer
digitale innganger definert i IEC 61131-2 og EN 61131-2, og med
alle krav til digitale utganger for samme standarder.
Alle digitale utganger kan kobles ut automatisk nar et program er
stoppet ved hjelp av boksen ”Alltid lav ved programstopppa
I/U-navn-skjermen (se bru- kerveiledningen til PolyScope). I denne
modusen er utgangen alltid lav nar et program ikke kjører.
Digitale utganger er ikke strømbegrenset, og hvis de overstiger
spesifiser- te data, kan det føre til permanent skade. Det er
imidlertid ikke mulig a ska- de utgangene dersom den interne 24
V-strømforsyningen brukes, pa grunn av strømvernet. Merk at
styreenhet og metallskjerming er koblet til GND. Send aldri
I/U-strøm gjennom skjermingene eller jordtilkoblingene.
De neste avsnittene viser noen enkle eksempler pa hvordan de
digitale ut- gangene kan brukes.
Belastning kontrollert av digital utgang
LOAD
All Rights Reserved 22 UR10
2.4. I/U for styreenhet
LOAD
24V
Hvis den tilgjengelige strømmen fra den interne strømforsyningen
ikke er nok, kan det benyttes en ekstern strømforsyning, som vist
ovenfor.
2.4.2 Digitale innganger
Parameter Min. Type Maks. Enhet Inngangsspenning -30 - 30 V
Inngang garantert AV hvis -30 - 7 V Inngang garantert PA hvis 10 -
30 V
Garantert AV hvis 0 - 5 mA PA strøm (10-30V) 6 - 10 mA
De digitale inngangene er innført som pnp, som betyr at de er
aktive nar det legges spenning pa dem. Inngangene kan brukes til a
lese knapper, sensorer el- ler til kommunikasjon med andre
PLS-systemer. Inngangene er kompatible med alle tre typer digitale
innganger definert i IEC 61131-2 og EN 61131-2, noe som betyr at de
vil samarbeide med alle typer digitale utganger definert i de samme
standarder.
Tekniske spesifikasjoner av digitale innganger er vist
nedenfor.
Digital inngang, enkel knapp
Eksempelet ovenfor viser hvordan man kobler til en enkel knapp
eller bryter.
Digital inngang, enkel knapp, ekstern strøm
GND GND
DO7 24V
24V 24V 24V
Button
Illustrasjonen ovenfor viser hvordan man kobler til en knapp med en
ekstern strømkilde.
All Rights Reserved 23 UR10
2.4. I/U for styreenhet
GND GND
DO0 DO1
DI6 DI7
24V 24V
A B
Hvis det kreves kommunikasjon med andre maskiner eller PLS, ma de
bru- ke pnp-teknologi. Husk a opprette en felles GND-forbindelse
mellom de ulike grensesnittene. Nedenfor vises et eksempel der to
UR-roboter (A og B) kommu- niserer med hverandre.
2.4.3 Analoge utganger
Parameter Min. Type Maks. Enhet Gjeldende utgangsspenning i
strømmodus 0 - 10 V
Gjeldende utgangsspenning i spenningsmodus -20 - 20 mA
Kortslutningsstrøm i spenningsmodus - 40 - mA Utgangsmotstand i
spenningsmodus - 43 - ohm
De analoge utgangene kan innstilles til bade strømmodus og
spenningsmo- dus, i omradene 4–20 mA og 0–10 V.
For a vise klart hvor enkelt det er a bruke analoge utganger, vises
noen enkle eksempler nedenfor.
Bruke de analoge utgangene
Dette er den normale og beste maten a bruke analoge utganger pa.
Illustra- sjonene viser en konfigurasjon der styreenheten til
roboten kontrollerer en utløser som et samleband. Det beste
resultatet oppnas ved bruk av strømmodus fordi den er mer immun mot
forstyrrende signaler.
Bruke analoge utganger, ikke-differensielt signal
All Rights Reserved 24 UR10
2.4. I/U for styreenhet
Hvis det styrte utstyret ikke tar en differensiell inngang, kan man
bruke den alternative løsningen som vises ovenfor. Denne løsningen
er ikke sa god med tanke pa støy og at den lett plukker opp
forstyrrende signaler fra andre maskiner. Vær forsiktig ved
koblingen og husk at forstyrrende signaler i analoge utganger ogsa
kan være til stede pa andre analoge I/U.
2.4.4 Analoge innganger
Parameter Min. Type Maks. Enhet Felles modus inngangsspenning -33 -
33 V
Differensiell modus inngangsspenning* -33 - 33 V Differensiell
inngangsmotstand - 220 - kohm
Felles modus inngangsmotstand - 55 - kohm Felles modus
forkastningsforhold 75 - - dB
De analoge inngangene kan settes i fire ulike spenningsomrader, som
imple- menteres pa ulike mater, og kan derfor ha ulike utjevnings-
og forsterkningsfeil. Den spesifiserte inngangsspenningen for
differensiell modus er bare gyldig med en spenning pa 0 V i felles
modus. For a gjøre det klart hvor enkelt det er a bruke analoge
utganger, vises noen enkle eksempler nedenfor.
Bruke analoge innganger, differensiell spenningsinngang
Den enkleste maten a bruke analoge innganger pa. Utstyret som
vises, som kan være en sensor, har en differensiell
spenningsutgang.
Bruke analoge innganger, ikke-differensiell spenningsinngang
Hvis det ikke er mulig a oppna et differensielt signal fra utstyret
som brukes, kan løsningen se noe ut som konfigurasjonen ovenfor. I
motsetning til eksempelet med den ikke-differensielle analoge
utgangen i avsnitt 2.4.3, vil denne løsningen være nesten like god
som den differensielle løsningen.
All Rights Reserved 25 UR10
2.5. Verktøy-I/U
Bruke analoge innganger, differensiell strøminngang
Nar det brukes lengre kabler, eller hvis det er et svært støyende
miljø, anbefa- les strømbaserte signaler. I tillegg leveres ogsa
noe utstyr kun med strømutgang. For a bruke strøm er det nødvendig
med ekstern motstand som vist ovenfor. Ver- dien til motstanden
ville normalt vært rundt 200 ohm, og det beste resultatet oppnas
nar motstanden er i nærheten av skrueklemmene til styreenheten.
Merk at toleransen til motstanden og den ohmske endringen pa grunn
av tem- peratur ma legges til feilspesifikasjonene til de analoge
inngangene.
Bruke analoge innganger, ikke-differensiell strøminngang
Hvis utgangen til utstyret er et ikke-differensielt strømsignal, ma
det brukes en motstand som vist ovenfor. Motstanden bør være pa
omtrent 200 ohm og forholdet mellom spenningen ved inngangen til
styreenheten og sensoren til ut- gangen gis av:
Spenning = strøm x motstand
Merk at toleransen til motstanden og den ohmske endringen pa grunn
av tem- peratur ma legges til feilspesifikasjonene til de analoge
inngangene.
2.5 Verktøy-I/U
I verktøyenden av roboten er det et lite koblingspunkt med atte
tilkoblinger.
All Rights Reserved 26 UR10
2.5. Verktøy-I/U
Farge Signal Rød 0 V (GND) Gra 0 V/12 V/24 V (STRØM) Bla Digital
utgang 8 (DO8)
Rosa Digital utgang 9 (DO9) Gul Digital inngang 8 (DI8)
Grønn Digital inngang 9 (DI9) Hvit Analog inngang 2 (AI2) Brun
Analog inngang 3 (AI3)
Dette tilkoblingspunktet gir strøm og styresignaler til de
grunnleggende gri- perne og sensorene, som kan finnes pa et
spesifikt robotverktøy. Denne kontak- ten kan brukes til a redusere
kabling mellom verktøy og styreenheten. Kontakten er en standard
Lumberg RSMEDG8, som kobles til med en kabel med betegnel- sen RKMV
8-354. Merk at verktøyflensen er koblet til GND (samme som den røde
kabelen).
Spesifikasjoner for intern strømforsyning
Parameter Min. Type Maks. Enhet Nettspenning i 24V-modus TBD 24 TBD
V Nettspenning i 12 V-modus TBD 12 TBD V Nettspenning i begge modi
- - 600 mA
Kortslutningsvern - 650 - mA Kapasitiv belastning - - TBD uF
Induktiv belastning - - TBD uH
Den tilgjengelige strømtilførselen kan settes til enten 0 V, 12 V
eller 24 V i katego- rien I/U i det grafiske brukergrensesnittet.
Vær forsiktig ved bruk av 12 V, siden en feil fra programmereren
kan føre til at spenningen endres til 24 V, som kan skade utstyret
eller føre til brann.
Det interne kontrollsystemet vil generere en feil i robotloggen
hvis strømmen overstiger grensen. De ulike I/U pa verktøyet er
beskrevet i følgende tre deler.
2.5.1 Digitale utganger
Parameter Min. Type Maks. Enhet Spenning nar apen -0,5 - 26 V
Spenning ved senking 1 A - 0,05 0,20 V Strøm ved senking 0 - 1
A
Strøm gjennom GND - - 1 A Vekseltid - 1000 - us
Kapasitiv belastning - - TBD uF Induktiv belastning - - TBD
uH
De digitale utgangene er implementert slik at de bare kan synke til
GND (0 V) og ikke kildestrøm. Nar en digital utgang aktiveres,
drives den korresponde- rende tilkoblingen til GND, og nar den
deaktiveres, er den korresponderende tilkoblingen apen (apen
tilkobling / apent avløp). Den største forskjellen mellom de
digitale utgangene inne i styreenheten og de i verktøyet er den
reduserte strømmen grunnet mindre tilkoblingspunkt.
All Rights Reserved 27 UR10
2.5. Verktøy-I/U
Vær oppmerksom pa at de digitale utgangene i verktøyet ikke er
strømbegrenset og overstiger spesifisert data som kan føre til
permanent skade.
For a vise klart hvor enkelt det er a bruke digitale utganger vises
et enkelt eksempel.
Bruke digitale utganger
Dette eksempelet illustrerer hvordan man slar pa belastning nar man
bruker den interne 12 V eller 24 V strømtilførselen. Husk at du ma
definere utgangsspen- ningen i kategorien I/U. Husk at det er
spenning mellom STRØM-tilkoblingen og skjermen/jordingen, selv nar
belastningen er slatt av.
2.5.2 Digitale innganger
Parameter Min. Type Maks. Enhet Inngangsspenning -0,5 - 26 V Logisk
lav spenning - - 2,0 V Logisk høy spenning 5,5 - - V
Inngangsmotstand - 47 k -
De digitale inngangene implementeres med svak nedtrekksmotstand.
Det- te betyr at en flytende inngang alltid vil lese lavt. De
digitale inngangene ved verktøyet er implementert pa samme mate som
de digitale inngangene inne i styreenheten.
Bruke digitale innganger
Eksempelet ovenfor viser hvordan man kobler til en enkel knapp
eller bryter.
2.5.3 Analoge innganger
De analoge inngangene ved verktøyet er svært ulike de som er inne i
styreenhe- ten. Det første man legger merke til er at de er
ikke-differensial, som er en ulem- pe sammenlignet med de analoge
inngangene pa kontrollerens I/U. Den andre tingen a legge merke til
er at verktøyets analoge innganger har strømmodus- funksjonalitet,
som er en fordel sammenlignet med kontrollerens I/U. De analo- ge
inngangene kan settes i ulike inngangsomrader som implementeres pa
ulike mater, og kan derfor ha ulike utjevnings- og
forsterkningsfeil.
All Rights Reserved 28 UR10
2.5. Verktøy-I/U
Parameter Min. Type Maks. Enhet Inngangsspenning i spenningsmodus
-0,5 - 26 V
Inngangsspenning i strømmodus -0,5 - 5,0 V Inngangsstrøm i
strømmodus -2,5 - 25 mA
Inngangsmotstand ved omrade 0V til 5V - 29 - k Inngangsmotstand ved
omrade 0V til 10V - 15 - k
Inngangsmotstand ved omrade 4 mA til 20 mA - 200 -
Det er viktig a forsta at alle strømendringer i den felles
GND-tilkoblingen kan føre til et signal med støy i de analoge
inngangene, fordi det vil være et spen- ningsfall langs GND-kablene
og inne i tilkoblingene. Merk at tilkobling mellom strømtilførselen
til verktøyet og de analoge inngange- ne vil skade
I/U-funksjonaliteten permanent hvis de analoge inngangene star i
strømmodus.
For a gjøre det klart hvor enkelt det er a bruke digitale innganger
vises noen enkle eksempler nedenfor.
Bruke analoge innganger, ikke-differensielle
Den enkleste maten a bruke analoge innganger pa. Sensorutgangen kan
væ- re enten strøm eller spenning, sa lenge inngangsmodusen til den
analoge inn- gangen er satt til det samme i kategorien I/U. Husk a
kontrollere at en sensor med spenningsutgang kan drive den interne
motstanden til verktøyet, ellers kan malingen være ugyldig.
Bruke analoge innganger, differensielle
Det er ogsa enkelt a bruke sensorer med differensielle utganger.
Bare kob- le den negative utgangsdelen til GND (0 V) med en
klemmerekke og den vil fungere pa samme mate som en
ikke-differensiell sensor.
All Rights Reserved 29 UR10
2.5. Verktøy-I/U
Kapittel 3
3.2 Lovbestemt dokumentasjon
En robotinstallasjon innen EU ma samsvare med maskindirektivet for
a sikre sik- kerheten til installasjonen. Dette inkluderer følgende
punkter.
1. Pass pa at produktet samsvarer med alle vesentlige krav.
2. Foreta en risikovurdering.
4. Lag en samsvarserklæring.
6. Sett et CE-merke pa robotinstallasjonen.
I en angitt robotinstallasjon er integratoren ansvarlig for
samsvaret med alle gjeldende direktiver. Universal Robots tar
ansvar for at roboten i seg selv sam- svarer med gjeldende
direktiver (Se avsnitt 5.1).
Universal Robots leverer en sikkerhetsveiledning, tilgjengelig pa
http://www.universal- robots.com for integratorer med lite eller
ingen erfaring med a lage nødvendig dokumentasjon.
Hvis roboten er installert utenfor EU, ma robotintegreringen
overholde lokale direktiver og lover i landet det gjelder.
Integratoren er ansvarlig for denne over- holdelsen. Det er alltid
nødvendig a utføre en risikovurdering for a sikre at hele
robotinstallasjonen er tilstrekkelig sikker.
3.3 Risikovurdering
En av de viktigste tingene en integrator ma gjøre, er a foreta en
risikovurdering. Universal Robots har identifisert de potensielle
alvorlige farene som er listet opp
31
3.3. Risikovurdering
som farer som ma vurderes av integratoren. Merk at andre betydelige
farer kan oppsta i en spesifikk robotinstallasjon.
1. Klemming av fingre mellom robotfoten og basen (ledd 0).
2. Klemming av fingre mellom armen og handleddet (ledd 4).
3. Kutt i huden fra skarpe kanter og skarpe punkter pa verktøy
eller verktøytilkobling.
4. Kutt i huden fra skarpe kanter og skarpe punkter pa gjenstander
i nærhe- ten av robotbanen.
5. Skader grunnet støt fra roboten.
6. Forstuing eller beinbrudd pa grunn av støt mellom en tung
nyttelast og en hard overflate.
7. Konsekvenser av løse bolter som holder robotarm eller
verktøy.
8. Elementer som faller ut av verktøyet. F.eks. pa grunn av et
darlig grep eller strømbrudd.
9. Elektrisk støt eller brann som følge av feil pa strømforsyning
hvis strømnettilkoblingen ikke er beskyttet av en hovedsikring, en
reststrømenhet og en forsvarlig til- kobling til jord. Se avsnitt
1.4.7.
10. Feil pa grunn av forskjellige nødstoppknapper for forskjellige
maskiner. Bruk felles nødstoppfunksjonen som beskrevet i avsnitt
2.3.1.
UR10 er imidlertid en svært sikker robot av følgende grunner:
1. Kontrollsystemet er i samsvar med ISO 13849-1, ytelsesniva
d.
2. Kontrollsystemet til roboten er en sikkerhet slik at alle
farlige feil tvinger ro- boten til a ga inn i en sikker
tilstand.
3. Høynivaprogramvare genererer et beskyttende stopp hvis roboten
støter pa noe. Grensen for tvunget stopp er lavere enn 150N .
4. Lavnivaprogramvare begrenser dreiemomentet generert av leddene,
og tillater bare et lite avvik fra forventet dreiemoment.
5. Programvaren hindrer programkjøring nar roboten er montert
annerledes enn den spesifiserte konfigurasjonen.
6. Vekten pa roboten er mindre enn 28kg.
7. Robotens form er glatt for a redusere trykket (N/m2) fra hver
kraft (N).
8. Det er mulig a bevege leddene til en strømløs robot. Se avsnitt.
3.4
Siden roboten er svært sikker, apner det muligheten til a spare
sikkerhetsskjer- mene eller bruke sikkerhetsskjermer med lavt
ytelsesniva. Som hjelp til a overbe- vise kunder og lokale
myndigheter er UR10 -roboten sertifisert av det danske Tek-
nologiske Institutt, som er et teknisk kontrollorgan under
maskindirektivet i Dan- mark. Sertifiseringen konkluderer at
roboten samsvarer med artikkel 5.10.5 i EN ISO 10218-1:2006. Denne
standarden er harmonisert under maskindirektivet og sier spesielt
at en robot kan brukes som en samarbeidende robot (dvs. uten sik-
kerhetsvakter mellom roboten og operatøren) hvis den er i samsvar
med artikkel 5.10.5. Selvfølgelig ma risikovurderingen likevel
konkludere med at den samlede
All Rights Reserved 32 UR10
3.4. Nødsituasjoner
robotinstallasjon er trygg nok. Man kan fa en kopi av
sertifiseringsrapporten ved a kontakte Universal Robots.
Standarden EN ISO 10218-1:2006 er gyldig til 1. januar 2013. I
mellomtiden er den nyere versjonen EN ISO 10218-1:2011 og den
tilsvarende EN ISO 10218- 2:2011 adressert til integratorene ogsa
gyldig. Der EN ISO 10218-1:2006 spesifikt sier at en maksimal kraft
pa 150N kombinert med en støttende risikovurdering er nødvendig for
samarbeidende funksjon, spesifiserer ikke de nyere standardene en
spesifikk maksimal kraft, men overlater dette til den spesifikke
risikovurderin- gen. Generelt sett betyr dette at uansett hvilken
standard som brukes, ma en ri- sikovurdering bekrefte at den
samarbeidende robotinstallasjonen er tilstrekkelig sikker, og i de
fleste tilfeller er en kombinasjon av en godt konstruert
robotinstal- lasjon og maksimal kraft pa 150 N tilstrekkelig.
3.4 Nødsituasjoner
Hvis det mot formodning skulle oppsta en nødsituasjon hvor et eller
flere robot- ledd ma flyttes og det enten ikke er mulig eller
ønskelig a sla pa roboten, er det tre forskjellige mater a tvinge
robotleddene i bevegelse uten a sla pa leddmo- torene:
1. Aktiv tilbakekjøring: Sla pa roboten ved a trykke pa PAknappen
pa opp- startsskjermen hvis mulig. I stedet for a trykke pa
bremsefrigivelsesknappen for a starte opp leddmotorene, trykker du
pa læringsknappen pa baksi- den av læringsdelen. Roboten gar inn i
en spesiell tilbakekjøringsmodus, og den vil løsne bremsene
automatisk mens roboten styres for hand. Nar du slipper
læringsknappen, lases bremsene pa nytt.
2. Manuell bremsefrigjøring: Fjern leddekselet ved a fjerne de fa
M3-skruene som holder det pa plass. Frigjør bremsen ved a dytte
stempelet pa den lille elektromagneten som vist pa bildet
nedenfor.
3. Tvungen tilbakekjøring: Tving et ledd til a bevege seg ved a dra
hardt i ro- botarmen. Hver leddbrems har en friksjonskobling som
muliggjør bevegel- se ved høyt tvungent dreiemoment. Tvungen
tilbakekjøring er kun ment for akutte nødsituasjoner, og kan
ødelegge leddmekanismer og andre deler.
Ikke vri noen av leddene mer enn nødvendig, og vær oppmerksom pa
gra- vitasjon og tung nyttelast.
All Rights Reserved 33 UR10
3.4. Nødsituasjoner
Kapittel 4
4.1 Produktgaranti
Uten forbindelse til noen krav brukeren (kunden) ma ha til en
forhandler, skal kunden fa en garanti fra produsenten under
vilkarene som er fastsatt nedenfor:
I tilfeller der nye enheter og deres komponenter viser seg a være
defekte som et resultat av produksjons- og/eller materialfeil innen
12 maneder fra en- heten ble tatt i bruk (maksimalt 15 maneder fra
levering), skal Universal Robots levere nødvendige reservedeler,
mens brukeren (kunden) skal sørge for arbeids- timene som kreves
for a skifte ut deler, enten ved a skifte ut delen med en annen del
som fungerer, eller reparere nevnte del. Denne garantien er ugyldig
hvis den defekte enheten skyldes feilaktig behandling og/eller man
ikke følger informa- sjonen som er gitt i brukerveiledningene.
Denne garantien gjelder ikke service som utføres av autorisert
forhandler eller kunden selv (f.eks. installasjon, konfigu- rasjon,
nedlasting av programvare). Kjøpskvitteringen, sammen med
kjøpsdato, ma fremlegges som bevis ved pakalling av garantien. Krav
under garantien ma sendes inn innen to maneder etter at feilen
oppstar. Eierskap av enheter eller komponenten som erstattes av og
returneres til Universal Robots skal overdras til Universal Robots.
Alle andre krav som er resultat av eller i forbindelse med enheten
skal ekskluderes fra denne garantien. Ingenting i denne garantien
skal forsøke a begrense eller ekskludere en kundes lovbestemte
rettigheter, heller ikke produsentens ansvar for dødsfall eller
personskader som kommer av produ- sentens uaktsomhet. Varigheten
til garantien skal ikke utvides av tjenestene som er gjengitt under
vilkarene i denne garantien. I den grad det ikke finnes noen
garantifeil, forbeholder Universal Robots seg retten til a ta
betalt av kunden for utskiftning eller reparasjon. Bestemmelsene
ovenfor innebærer ikke en endring i bevisbyrden pa bekostning av
kunden.
Dersom en enhet har feil, skal ikke Universal Robots dekke
eventuelle følgeskader eller tap, slik som tap av produksjon eller
skade pa annet produksjonsutstyr.
4.2 Ansvarsfraskrivelse
Universal Robots fortsetter a forbedre driftssikkerheten og ytelsen
pa sine pro- dukter, og forbeholder seg derfor retten til a
oppgradere produktet uten var- sel. Universal Robots er nøye med at
innholdet i denne brukerveiledningen er nøyaktig og korrekt, men
tar ikke ansvar for eventuelle feil eller manglende infor-
masjon.
35
Kapittel 5
5.1 Innledning
I henhold til maskindirektiv 2006/42/EF, anses roboten som en
delvis komplett ma- skin. De følgende avsnittene korresponderer og
samsvarer med tillegg II i dette direktivet.
5.2 Produktprodusent
5260 Odense S Danmark
5.3 Person autorisert til a utarbeide den tekniske dokumen-
tasjonen
Navn Lasse Kieffer Adresse Sivlandvænget 1
5260 Odense S Danmark
Telefonnummer +45 8993 8971 E-postadresse
[email protected]
5.4 Beskrivelse og identifikasjon av produkt
Roboten er beregnet for enkel og sikker utføring av oppgaver som
plukking, lasting/lossing, montering og palletering.
37
Serienummer for kontrollboks
Kommersielt navn UR10
5.5 Vesentlige krav
De individuelle robotinstallasjonene har ulike sikkerhetskrav og
integratoren er derfor ansvarlig for alle farer som ikke dekkes av
den generelle utformingen av roboten. Men den generelle utformingen
av roboten, inkludert grensesnittene, møter alle vesentlige krav
som er listet opp i tillegg I av 2006/42/EF.
Den tekniske dokumentasjonen til roboten er i overensstemmelse med
tillegg VII del B av 2006/42/EF.
All Rights Reserved 38 UR10
5.5. Vesentlige krav
Anvendte harmoniserte standarder ISO 13849-1:2006 (Under anvendte
direktiver) ISO 13849-2:2003
ISO 10218-1:2006 (delvis) ISO 10218-1:2011 (delvis) ISO
10218-2:2011 (delvis) ISO 13850:2006 ISO 12100:2010 ISO 3745:2003
IEC 61000-6-2 ED 2.0:2005 IEC 61000-6-4 AMD1 ED 2.0:2010 IEC
61131-2 ED 3.0:2007 (delvis) EN ISO 13849-1:2008 EN ISO
13849-1/AC:2009 EN ISO 13849-2:2008 EN ISO 10218-1:2008 (delvis) EN
ISO 10218-1:2011 (delvis) EN ISO 10218-2:2011 (delvis) EN ISO
13850:2008 EN ISO 12100:2010 EN ISO 3745:2009 EN 61000-6-2:2005 EN
61000-6-4/A1:2011 EN 61131-2:2007 (delvis) EN 1037:2010
Anvendte generelle standarder ISO 9409-1:2004 (delvis) (Ikke alle
standarder er listet opp) ISO 9283:1999 (delvis)
ISO 9787:2000 (delvis) ISO 9946:2000 (delvis) ISO 8373:1996
(delvis) ISO/TR 14121-2:2007 ISO 1101:2004 ISO 286-1:2010 ISO
286-2:2010 IEC 60664-1 ED 2.0:2007 IEC 60947-5-5:1997 IEC
60529:1989+A1:1999 IEC 60320-1 Ed 2.0:2001 IEC 60204-1 Ed 5.0:2005
(delvis) EN ISO 9409-1:2004 (delvis) EN ISO 9283:1999 (delvis) EN
ISO 9787:2000 (delvis) EN ISO 9946:2000 (delvis) EN ISO 8373:1996
(delvis) EN ISO/TR 14121-2:2007 EN ISO 1101:2005 EN ISO 286-1:2010
EN ISO 286-2:2010 EN 60664-1:2007 EN 60947-5-5:1998 EN
60947-5-5/A1:2005 EN 50205:2003 EN 60529:1991+A1:2000 EN 60320:2003
EN 60204:2006 (delvis)
Merk at lavspenningsdirektivet ikke er listet opp. Maskindirektivet
2006/42/EF
All Rights Reserved 39 UR10
5.6. Kontaktinformasjon for nasjonale myndigheter
og lavspenningsdirektivet er de primære direktivene. Et produkt kan
bare dek- kes av ett primært direktiv, og fordi hovedfarene for
roboten er mekanisk be- vegelse og ikke elektrisk støt, dekkes den
av maskindirektivet. Utformingen av roboten oppfyller imidlertid
alle krav til elektrisk konstruksjon som beskrevet i lav-
spenningsdirektivet 2006/95/EF.
Merk ogsa at WEEE-direktivet 2002/96/EF er listet opp pa grunn av
symbolet med en overkrysset avfallsbeholder pa roboten og
kontrollboksen. Universal Ro- bots registrerer alle robotsalg innen
Danmark til det nasjonale WEEE-registeret i Danmark. Alle
forhandlere utenfor Danmark og innen EU ma selv registrere seg i
WEEE-registeret i det landet selskapet har hovedkontor.
5.6 Kontaktinformasjon for nasjonale myndigheter
Autorisert person Lasse Kieffer +45 8993 8971
[email protected]
CTO Esben H. Østergaard +45 8993 8974
[email protected]
Adm.dir. Enrico Krog Iversen +45 8993 8973
[email protected]
5.7 Viktig merknad
Roboten skal ikke settes i drift før maskineriet som den inngar i,
er erklært a sam- svare med bestemmelsene i maskindirektivet
2006/42/EF og nasjonale lover om gjennomføring.
5.8 Sted og dato for erklæringen
Sted Universal Robots A/S Sivlandvænget 1 5260 Odense S
Danmark
Dato 1. desember 2011
Navn Lasse Kieffer Adresse Sivlandvænget 1
5260 Odense S Danmark
All Rights Reserved 40 UR10
Tillegg A
Komme i gang
Beskrivelse og identifikasjon av produkt
Vesentlige krav
Identitet og signatur for autorisert person
Sertifiseringer