-
8/3/2019 Bryan Guzman A
1/15
Collision Mitigation break system
(CMS)
What is CMS?
How it worksSystem Configuration
Warning Devices
Collision Avoidance ManeuversConclusions
-
8/3/2019 Bryan Guzman A
2/15
References:
Honda Motor: Science & Education. Trends in
Japan 2003
Autoweb.com.au: Honda Develops New CollisionAvoidance Safety
System. 2003
Francois Granet, Rosella Picado, Lauren Smith:
Longitudinal Avoidance. 2003
-
8/3/2019 Bryan Guzman A
3/15
What is CMS?
CMS is the world's first Collision MitigationBrake System (CMS).
The technology predictsrear-end collisions and assists brake
operation toreduce the impact.
CMS anticipates a collision based on drivingconditions, distance
to the vehicle ahead andrelative speeds. It then uses visual and
audiowarnings to prompt the driver to take preventativeaction and
also initiates braking if the driver failsto respond to the
warnings.
-
8/3/2019 Bryan Guzman A
4/15
How it Works?
First, the radar measures the distance between the car andother
vehicles up to 100 meters ahead and any differencesin speed, and an
onboard computer judges the risk of a
collision based on this information and on data about thecourse
of the car.
Then if the system judges that there is a risk of a crash,such
as when the car gets too close to the vehicle in front,it alerts
the driver by sounding an alarm and lighting up a
BRAKE warning on the dashboard. This is the firstwarning stage,
aimed at alerting the driver to the dangerand encouraging the
driver to slow down.
-
8/3/2019 Bryan Guzman A
5/15
The system works in conjunction with the "E-Pretensioner"
seatbelt retraction system. If the car continues to get
closer
to the other vehicle and the computer decides that it will
be
hard to avoid a collision, it tightens the seatbelt more
firmly and applies the brakes forcibly and hard.
The CMS has three staged modes:
An audible warning,
An audible warning, light braking and light seat-belt
retraction.An audible warning, strong braking and strong
seat-belt
retraction.
-
8/3/2019 Bryan Guzman A
6/15
CMS configuration:
Millimeter-wave radar: Detects vehicles within a rangeof about
100 meters ahead, in a 16-degree arc.
Sensors: The system determines driving conditions using arange
of sensors that detect factors such as yaw rate,steering angle,
wheel speed, and brake pressure.
CMS Electronic Control Unit (ECU): Based on distance
to the vehicle ahead and relative speed obtained from
radarinformation, the ECU calculates the likelihood of acollision,
and warns the driver, and in some cases activatesthe braking
function.
-
8/3/2019 Bryan Guzman A
7/15
E-Pretensioner ECU: Sends instructions to the motorized
E-Pretensioner to retract the seatbelt, based on braking
instruction signals from the CMS ECU and electronically
controlled brake assist signals.
E-Pretensioner: Retracts the seatbelt using an internal
motor, based on instructions from the E-Pretensioner ECU.
Used in combination with conventional pretensioners.
Meter unit: Receives signals from the CMS ECU, and
warns the driver of potential danger using a buzzer and a
visual warning.
-
8/3/2019 Bryan Guzman A
8/15
-
8/3/2019 Bryan Guzman A
9/15
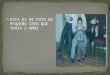
Figure: Autoweb.com.au, CAS 2003
-
8/3/2019 Bryan Guzman A
10/15
CMS Warning Devices
Visual head-up displays: warnings are displayed on the
windshield in the driver's field of view.
Audio/Voice signals: auditory signals appear to be less
intrusive on driving tasks.
-
8/3/2019 Bryan Guzman A
11/15
CMS Collision Avoidance
Maneuvers:Headway distance control: the system warns the
driver
whenever his/her car is following the leading car too
closely
Hazard warning: the system warns the driver of an object
within its projected path, so that the driver has sufficient
time to avoid a crash.
Automatic vehicle control: the system controls the
vehicle's brakes and steering wheel
-
8/3/2019 Bryan Guzman A
12/15
Precise breaks Actuator Systems
depend a lot on sensors:
Sensors fulfill the tasks of headway control andobstacle
detection, which are the basis of Collision
Avoidance Systems (CAS) Sensing.
-
8/3/2019 Bryan Guzman A
13/15
SensorSensing
Ran eResolution
Directional
it
Response
TimeCost Size
Ultrasonics 10 m. (max) 10 mm. 30 deg. (min)speed ofsound
$15
30 mm.diameter
PassiveInfrared 10 m. (max) poor 90 deg. 1sec. under $10
20 mm.square
Laser radar
(lidar)
100 m. (max),
0.5 m. (min) 1mm. (min) 1deg.
fast (10
msec.) over $50
50 mm. x 100
mm.
FMCW Radar 150 m. 10 mm.2 deg. or
wider fast (1msec) over $200250 mm. x 150
mm.
ImpulseRadar 50 m. (max) 10 mm. 25 deg. Fast (1msec) over
$100
250 mm. x 100mm.
Capacitive 2 m. (max) 10 mm.
90 deg. Or
wider fast (1msec) $1 smallVisionSystems 100 m. poor good 100
msec. Over $200
40 mm. x 100mm.
Table 2
Sensor Devices' Measures of Performance
Source: Stobart and Upton, 1995
-
8/3/2019 Bryan Guzman A
14/15
Indicators:
Sensing range: the maximum range over which the
technique can be used
Resolution: the relative change in distance that can
bemeasured
Directionality: the width of the beam over which the sensor
is sensitive
Response time: how quickly the sensor can respond to achange in
distance
-
8/3/2019 Bryan Guzman A
15/15
Conclusion
Automatic braking systems can detect an obstacle and
bring the car to a complete halt just before impact. The
technology has reached the level where the systems can
even detect the speed of a vehicle in front, compare it withthe
speed of the user's car, and stop the car to avoid an
accident. Honda and Toyota are applying and testing these
Automatic braking systems nowadays and will continue
improving this type of technology.