Embed Size (px)
Citation preview

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 1/31
By
B. Preethi
B. SriBhavana

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 2/31
Contents
Introduction
Purpose
Sensors
Actuators
Planning and Control
ConclusionReferences

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 3/31
Introduction
A humanoid robot is an autonomous robot because it can adapt to changes in itsenvironment or itself and continue to reach its
goal. This is the main difference betweenhumanoids and other kinds of robots, likeindustrial robots which are used for performingtasks in highly structured environments.
In this context, some of the capacities of ahumanoid robot may include, among others:

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 4/31
self maintenance (recharge itself, swap batteries…)autonomous learning (learn or gain new capabilities
without outside assistance, adjust strategies based on
the surroundings and adapt to new situations)avoiding harmful situations to people, property and
itself
safe interacting with human beings and theenvironment.

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 5/31
A robot is an electro-mechanical device that can
perform autonomous or preprogrammed tasks.
A robot may act under the direct control of a
human or autonomously
under the control of a
programmed computer .
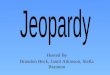
Honda's ASIMO, an example
of a humanoid robot

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 6/31
Purpose
Humanoid robots are used as a research tool inseveral scientific areas. Researchers need tounderstand the human body structure and behavior to build and study humanoid robots.
On the other side, the attempt to simulate thehuman body leads to a better understanding of it. Human cognition is a field of study which is
focused on how humans learn from sensoryinformation in order to acquire perceptual andmotor skills.

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 7/31
This knowledge is used to develop computational
models of human behaviour and it has been
improving over time.Although the initial aim of humanoid research
was to build better orthosis and prosthesis for
human beings, knowledge has been transferred between both disciplines.
Besides the research, humanoid robots are being
developed to perform human tasks like personalassistance, where they should be able to assist the
sick and elderly, and dirty or dangerous jobs.

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 8/31
Regular jobs like being a receptionist or a
worker of an automotive manufacturing line arealso suitable for humanoids.
In essence, since they can use tools and operate
equipment and vehicles designed for the humanform, humanoids could theoretically perform
any task a human being can, so long as they
have the proper software. However, the
complexity of doing so is deceptively great.

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 9/31
Diagram of the structurally variable monitoring
and control system.

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 10/31
Like other mechanical robots, humanoids refer to the following basic components too:
Sensing
Actuating andPlanning and Control.

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 11/31
Sensors
A sensor is a device that measures someattribute of the world. Being one of the three primitives of robotics (besides planning andcontrol), sensing plays an important role in
robotic paradigms.Sensors can be classifiedaccording to the physical process with whichthey work or according to the type of measurement information that they give asoutput. In this case, the second approach wasused.

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 12/31
Most sensors operate via electrical or electronic
signals, although other types of sensors exist.
Basically, a sensor is a type of transducer. Sensorsare either direct indicating (e.g. a mercury
thermometer or electrical meter) or are paired with
an indicator (perhaps indirectly through an analog to
digital converter, a computer and a display) so that
the value sensed becomes human readable.

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 13/31
Proprioceptive Sensors
Proprioceptive sensors sense the position, the
orientation and the speed of the humanoid’s
body and joints.
In human beings inner ears are used to
maintain balance and orientation.

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 14/31
Humanoid robots use accelerometers to
measure the acceleration, from which velocity
can be calculated by integration; tilt sensors to
measure inclination; force sensors placed in
robot’s hands and feet to measure contactforce with environment; position sensors, that
indicate the actual position of the robot (from
which the velocity can be calculated byderivation) or even speed sensors.

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 15/31
Exteroceptive Sensors
Exteroceptive sensors give the robotinformation about the surrounding
environment, which is the real world in
case of humanoid robots. That informationallows the robot to interact with the world.
The exteroceptive sensors are classified
according to their functionality. Proximitysensors are used to measure the relative
distance (range) between the sensor and
objects in the environment.

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 16/31
They perform the same task that vision and tactile
sensing do in human beings. For that, humanoidrobots can use sonars, infrared sensors or tactile
sensors like bump sensors, whiskers (or feelers),
capacitive or piezoresistive sensors.Tactile sensors also provide information about
forces and torques transferred between the robot and
the objects.

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 17/31
There are other kinds of proximity
measurements like laser ranging, the usage of stereo cameras or projecting a colored line,
grid or pattern of dots on the environment and
observe how the pattern is distorted .Vision refers to processing data from any
modality which uses the electromagnetic
spectrum to produce an image.

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 18/31
In humanoid robots context it is used to
recognize objects and determine their
properties.Vision sensors work similarly to the eyes of
the human beings.
Most humanoid robots use CCD cameras asvision sensors .They can also capture a scene
with the CCD cameras installed in its head &
can transmit the video signals which can beseen on a remote monitor .

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 19/31

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 20/31
Actuators
Actuator is the name given to each one of the motorswhich move the robot, a humanoid robot in this case.
Humanoid robots are constructed in such a way that
they mimic human body, so they have actuators that perform like muscles and joints, although with a
different structure.
To achieve the same effect as human actuators
humanoids use mainly rotary actuators.

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 21/31
The actuators are all wired to an electrical circuit.
The circuit powers electrical motors and solenoidsdirectly, and it activates the hydraulic system by
manipulating electrical valves.
The valves determine the pressurized fluid's paththrough the machine.
To move a hydraulic leg, for example, the robot's
controller would open the valve leading from the
fluid pump to a piston cylinder attached to that leg.

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 22/31
The pressurized fluid would extend the piston,
swiveling the leg forward.
Typically, in order to move their segments in
two directions, robots use pistons that can push
both ways.

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 23/31
Planning and Control
In planning and control the essential difference
between humanoids and other kinds of robots
(like industrial ones) is that the movement of
the robot has to be human-like, using leggedlocomotion, especially biped gait (A gait is a
particular way or manner of moving on foot:
walking and running are the two basic humangaits). ;). energy consumption, like it happens
in the human body.

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 24/31
For this reason, studies on dynamics and control
of these kinds of structures become more and
more important.A controller manipulates the inputs to a system to
obtain the desired effect on the output of the
system.To maintain dynamic balance during the walk, a
robot needs information about contact force and
its current and desired motion. The solution tothis problem relies on a major concept, the Zero
Moment Point (ZMP).

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 25/31
Zero Moment Point
is a concept related withdynamics and control of legged locomotion, e.g.,
for humanoid robots.
It specifies the point with respect to which
dynamic reaction force at the contact of the foot
with the ground does not produce any moment,
i.e. the point where total inertia force equals 0
(zero).

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 26/31
Another characteristic about humanoid robots is
that they move, gather information (usingsensors) on the “real world” and interact with it,
they don’t stay still like factory manipulators and
other robots that work in highly structured
environments.
Planning and Control have to focus about self-
collision detection, path planning and obstacle
avoidance to allow humanoids to move in
complex environments.

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 27/31
There are features in the human body that can’t
be found in humanoids yet. They include
structures with variable flexibility, which providesafety (to the robot itself and to the people), and
redundancy of movements, i.e., more
degree of freedom and therefore wide task availability.
Although these characteristics are desirable to
humanoid robots, they will bring morecomplexity and new problems to planning and
control.

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 28/31
The humanoid robots developed until now are
mostly very heavy and hence there exists adanger that even injure their operators.
To overcome, they have developed a
humanoid robot closer to the size of a human being but very light in weight with a high level
of flexibility and versatility and able to
execute self-supported action.

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 29/31
Research Issues
Roboticist Rodney Brooks has long arguedthat our view of how we think and act istainted with subjectivity. We cannot whollytranscend our biased perspective.
The best we can do is to neutralize its effect by bringing humanoid bodies in line with our own.
Most likely, we will never fully understand,much less recreate everything that it means to be human.
A th f ti f lf d t di d

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 30/31
As the frontiers of our self-understanding expand,
humanoid robots may simply follow (and, at
times, propel) our
continuouslychanging conception
of what we are.
Robot developed which imitateshuman actions and observes
with a camera
equivalent to the humaneye.

8/14/2019 By B. Preethi B. SriBhavana
http://slidepdf.com/reader/full/by-b-preethi-b-sribhavana 31/31
Conclusion
We can conclude that ,using robots we have
both advantages as well as disadvantages .
The disadvantages is that they may fall over
and be damaged ,and this is one of the fatal
barriers to practical applications of humanoid
robots.