Embed Size (px)
Citation preview
第5章 連続体の振動
5.1 弦の振動 運動方程式(波動方程式) 自由振動(一般解/定在波) 強制振動
5.2 棒の縦振動 5.3 棒のねじり振動 5.4 はりの曲げ振動 5.5 連続体の運動方程式

変位 有限自由度系:ベクトル 分布系:場所の関数
運動方程式 有限自由度系:連立2階常微分方程式 分布系: 2階偏微分方程式
有限自由度系 v.s. 分布系(連続体)
( ) ( ) ( )
( ) [ ]l,x,t,xy
ty,,y,ty,ty n
0
210
∈
( )t,xy( ) 00 =ty ( )ty1 ( )ty2 ( )tyn

5.1 弦の振動
運動方程式(波動方程式) 線密度 µ の弦に張力 T が作用している.
微小要素の伸び
( ) ( )2
2 2
2 4 2 2
d d d d d 1 1 d
1 3 1 d 12 4! 2
ys x x y x xx
y y y yxx x x x
∂∂
∂ ∂ ∂ ∂∂ ∂ ∂ ∂
− = + − = + − = − + ≈ <<
( )t,xy
0=x lx =x
dx
dyds変位

運動エネルギー ポテンシャルエネルギー Lagrange 関数 作用 作用の第1変分
( )2
0
1, d2
l yK y y xt
∂µ∂
= ∫
Hamilton の原理
( ) ( ) ( ), , , ,L y y y K y y U y y∇ = − ∇
( )2
0
1, d2
l yU y y T xx
∂∂
∇ = ∫
2
1
22 2
1 11
0
2 2
2 20 00
d d
d d d d 0
t l
t
t ll t t l
t tt
y y y yI T x tt t x x
y y y yy x T y t T y x tt x t x
∂ ∂ ∂ ∂δ µ δ δ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂µ δ δ µ δ∂ ∂ ∂ ∂
= −
= − − − =
∫ ∫
∫ ∫ ∫ ∫
( ) ( )2
1
, , , , dt
tI y y y L y y y t∇ = ∇∫

変分制約と境界条件を考慮する. あるいは
[ ]( ) [ ]( ) [ ]( ) [ ]( )1 2 1 2 1 2
2 2
2 2
0, , 0, , 0, 0, , , , 0
y l t y l t y t t y l t t
y yTt x
δ δ δ δ
∂ ∂µ∂ ∂
= = = =
⇒ =
Hamilton の原理(cont.)
2 22
2 2
y yct x
∂ ∂∂ ∂
=Tcµ
=
運動方程式
波動方程式 波の速度
波動方程式の一般解は次式で与えられる. ここで,f1(z), f2(z) は初期条件 y([0,l],0), ˙y([0,l],0) に
よって決まる定関数である. なぜならば z1=ct−x, z2=ct+x と仮定して
( ) ( ) ( )xctfxctft,xy ++−= 21
自由振動(一般解)
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
2 22 2 2 221 1 2 2 1 1 2 121 2
2 2 2 2 21 2 1 1
2 22 2 2 221 1 2 2 1 1 2 12 2 21 2
2 2 2 2 21 2 1 1
d d d dd d d d
d d d dd d d d
f z f z f z f zz zy ct z t z t z z
f z f z f z f zz zyc c cx z x z x z z
∂ ∂∂∂ ∂ ∂
∂ ∂∂∂ ∂ ∂
= + = +
= + = +

( ) ( )
( ) ( ) ( )
1 1
1 1 1
d , d d dd d , d ,d
y x x t t f ct c t x xxc y x x t t f ct x y x tt
+ + = + − −
= ⇒ + + = − =
進行波
y1(x,t)= f1(ct−x) は進行波である. なぜならば
τc
( )τ+t,xy1
( )t,xy1x
x
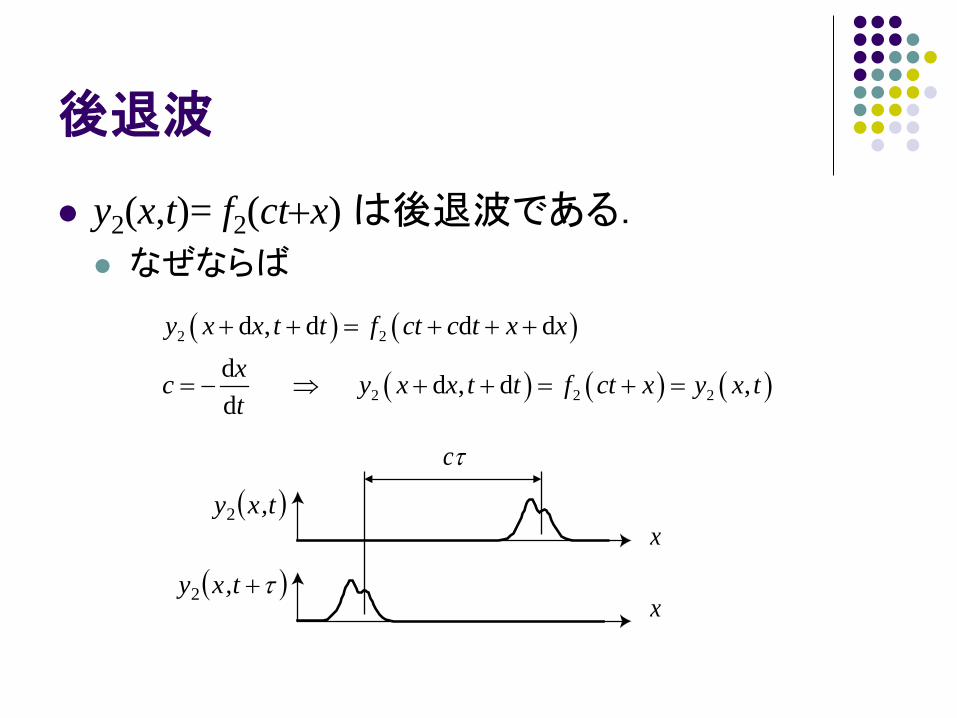
y2(x,t)= f2(ct+x) は後退波である. なぜならば
( ) ( )
( ) ( ) ( )
2 2
2 2 2
d , d d dd d , d ,d
y x x t t f ct c t x xxc y x x t t f ct x y x tt
+ + = + + +
= − ⇒ + + = + =
後退波
( )τ+t,xy2
( )t,xy2
τc
x
x

波の交差
一般解は進行波と後退波の重ね合わせである. したがって,進行波と後退波は交差する.
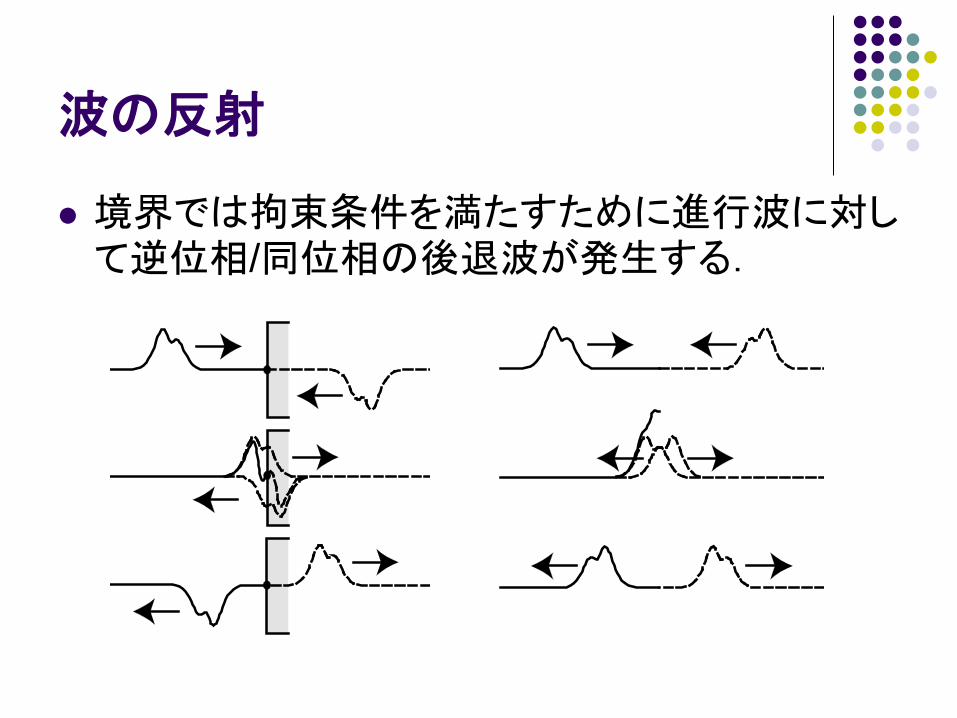
波の反射
境界では拘束条件を満たすために進行波に対して逆位相/同位相の後退波が発生する.

振幅だけが時間と共に変化する自由振動を定在波と呼ぶ.
定在波は波動方程式の変数分離型の解である.
波動方程式に代入する.
( ) ( ) ( ),y x t Y x G t=
自由振動(定在波)
変数分離型
定数
x だけの関数
( ) ( ) ( ) ( )( )
( )( )
( )2 2 2 22 2 2
2 2 2 2
d d d d1 1 = =d d d dG t Y x Y x G t
Y x c G t ct x Y x x G t t
ω= ⇒ −
t だけの関数

したがって,
ここで,A, B は初期条件によって決まる実定数,C, κ は境界条件によって決まる実定数
( ) ( ) ( )
( ) ( ) ( )
22
2
22
2
d0 cos sin
dd
+ 0, cos sin , 1d
G tG t G t A t B t
tY x
Y x Y x C x D x Dx c
ω ω ω
ωκ κ κ κ
+ = ⇒ = +
= = ⇒ = + =
変数分離型の一般解
大きさを決める 定数が過剰
両端固定の境界条件から C, κ を決定する.
したがって
[ ]( ) [ ]( ) ( ) ( )( )
( ) ( )
0, , , , 0 0 0
0 0
sin 0 , 1, 2,r
y y l Y Y l
Y CrY l l rlπκ κ κ
−∞ +∞ = −∞ +∞ = ⇒ = =
= =⇒
= = ⇒ = = =
両端固定の場合
r 次の固有振動モード関数 ( ) ( ) ( ) ( )sin sinr r rY x Y x x xlπκ= = =

固有振動モード関数
両端固定の場合(cont.)
( )( ) ( ) xl
rxxY rr πκ sinsin ==
( )( )xY 1
( )( )xY 2
( )( )xY 3
( )( )xY 4

κ(r) から固有円振動数 ωn(r)が決まる.
したがって,両端固定の場合の一般解は ただし,A(r),B(r) は初期条件によって決まる実定数
( ) ( ) ( )( )
, 2 2
rr r r n
n nr c r T r Tc f
c l l lωω π πκ ω κ
µ π µ= ⇒ = = = = =
両端固定の場合の一般解
固有振動数
( ) ( ) ( ) ( ) ( )( )1
, cos sin sinr r r rn n
r
ry x t A t B t xlπω ω
∞
=
= +∑

両端固定の場合の解
初期条件を与えて自由振動の解を得る. 初期変位と初期速度の Fourier 級数が初期条件に
よって決まる実定数 A(r),B(r) に対応する.
( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( )
( ) ( )
=
=
==
==
∫
∫
∑
∑∞
=
∞
=lr
lr
r
rrn
r
r
dxxl
rxgcr
B
dxxl
rxgl
A,
xgxl
rB,xy
xgxl
rA,xy
0 2
0 1
21
11
sin2
sin2
sin0
sin0
ππ
π
πω
π
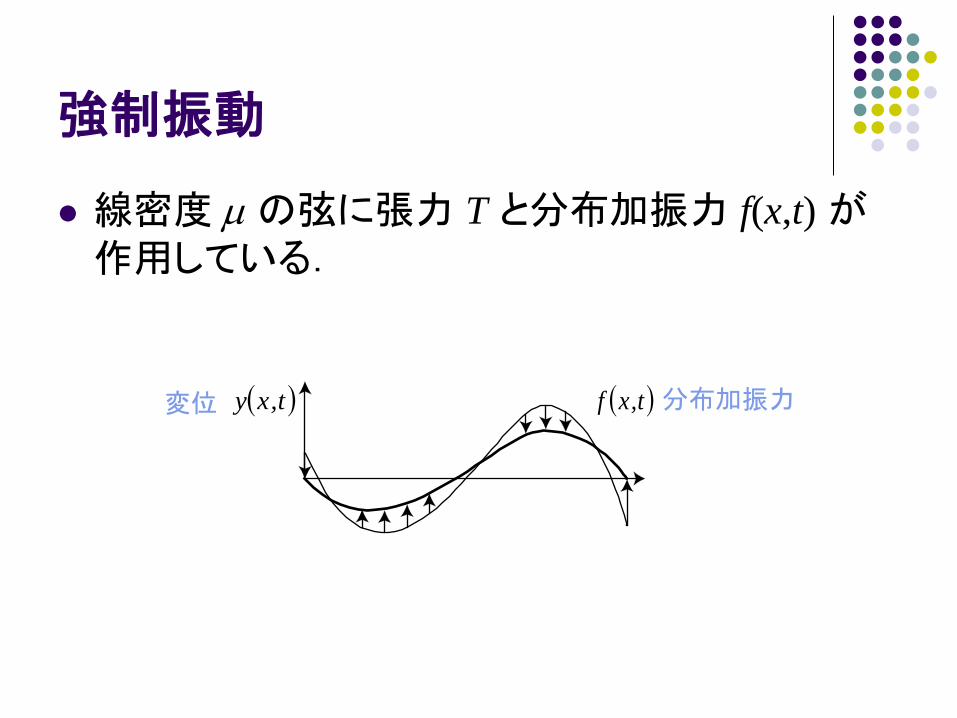
線密度 µ の弦に張力 T と分布加振力 f(x,t) が作用している.
強制振動
( )t,xy変位 ( )t,xf 分布加振力

Hamilton の原理
Lagrange 関数
作用の停留条件
( )2 2
0
1 1, , d2 2
l y yL y y y T fy xt x
∂ ∂µ∂ ∂
∇ = − −
∫
2 2
1 1
2 2
2 20
2 2
2 2
d d d 0
t t l
t t
y yI L t T f y x tt x
y yT ft x
∂ ∂δ δ µ δ∂ ∂
∂ ∂µ∂ ∂
= = − − − =
⇒ − =
∫ ∫ ∫
運動方程式

手順1:モード対 ωn(r), Y(r)(x), r=1,2,…を求める
手順2:固有振動モード関数の直交性を利用して,物理変位関数をモード変位関数に変換することによって運動方程式を非連成化する. 固有振動モード関数 Y(r)(x), r=1,2,…の直交性
したがって,
( ) ( ) ( ) ( )0 0
d sin sin d2
l lp qpq
p q lY x Y x x x x xl lπ π µµ µ δ= =∫ ∫
固有振動モードを利用した方法
µ 直交性
正規固有振動モード関数
( ) ( ) 2 sin , 1, 2,r rU x x rl l
πµ
= =

固有振動モードを利用した方法(cont.)
物理変位関数をモード変位関数に変換する.
モード変位関数の2階の導関数を書き換える.
運動方程式に座標変換を代入する.
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )2
=1 =1,r r r r r
nr r
U x t U x t f x tµ ξ µω ξ∞ ∞
+ =∑ ∑
物理変位関数
モード変位関数 ( ) ( ) ( ) ( ) ( )
1, r r
ry x t U x tξ
∞
=
= ∑
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )22
2 22
dd
rr r r r r
n
U x r U x U x U xx l T
π µκ ω = − = − = −

固有振動モードを利用した方法(cont.) U(p)(x) との内積をとって
正規固有振動モード関数の正規直交性から非連成の運動方程式を得る.
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )2
0 0 0 d d d
l l lp r r r p r r p pnU U x U U x U f x fµ ξ µω ξ+ = ≡∫ ∫ ∫
( ) ( ) ( ) ( ) ( )2 1, 2,r r r rn f rξ ω ξ+ = =
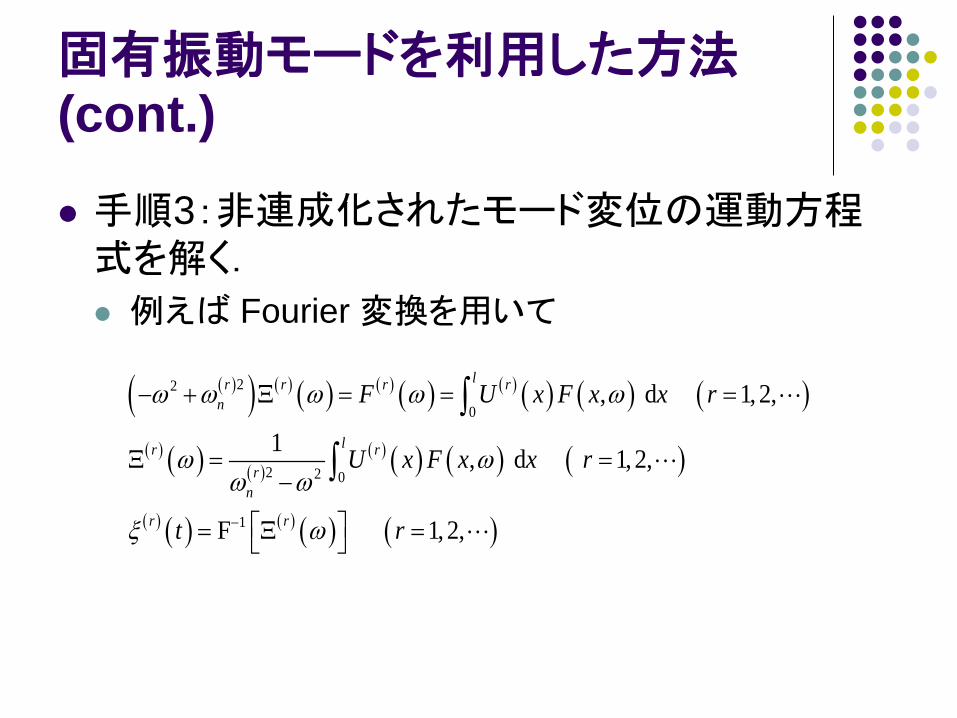
手順3:非連成化されたモード変位の運動方程式を解く. 例えば Fourier 変換を用いて
固有振動モードを利用した方法(cont.)
( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
22
0
2 2 0
1
, d 1, 2,
1 , d 1, 2,
F 1, 2,
lr r r rn
lr rr
n
r r
F U x F x x r
U x F x x r
t r
ω ω ω ω ω
ω ωω ω
ξ ω−
− + Ξ = = =
Ξ = =−
= Ξ =
∫
∫
固有振動モードを利用した方法(cont.)
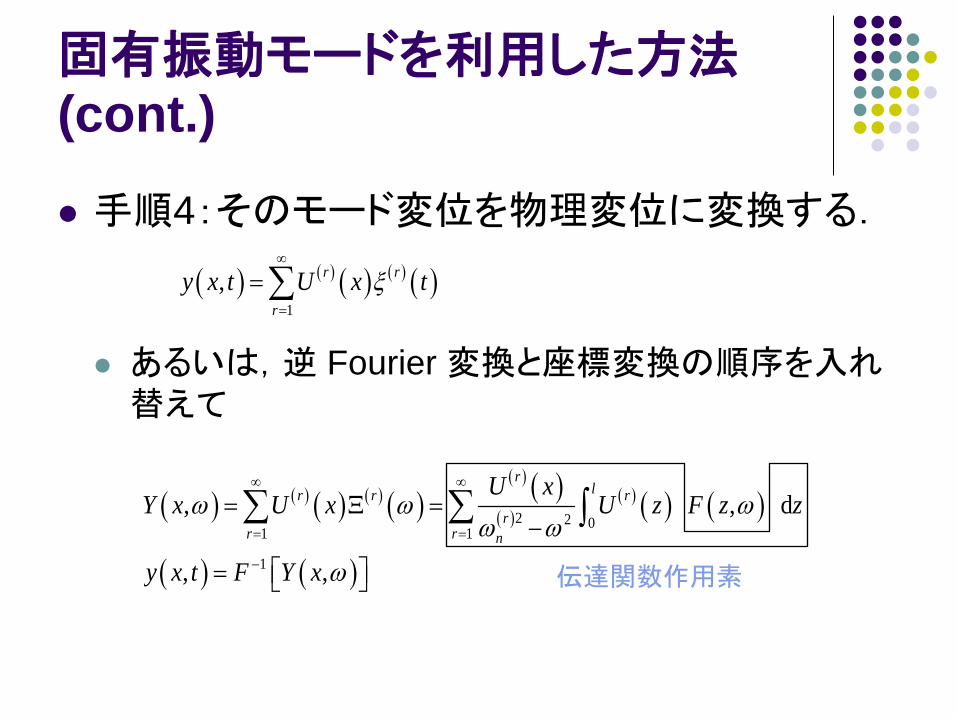
手順4:そのモード変位を物理変位に変換する.
あるいは,逆 Fourier 変換と座標変換の順序を入れ替えて
( ) ( ) ( ) ( ) ( )
( ) ( )( )
( ) ( ) ( )
( ) ( )
2 2 01 1
1
, , d
, ,
rlr r r
rr r n
U xY x U x U z F z z
y x t F Y x
ω ω ωω ω
ω
∞ ∞
= =
−
= Ξ =−
=
∑ ∑ ∫
伝達関数作用素
( ) ( ) ( ) ( ) ( )1
, r r
ry x t U x tξ
∞
=
= ∑

断面積 A 密度 ρ 縦弾性係数 E の棒が長さ方向に振動する場合を考える. 応力とひずみ
ひずみエネルギー
運動エネルギー
, uEx
∂σ ε ε∂
= =
5.2 棒の縦振動
( )2
0 0
1 1, d d2 2
l l uU u u A x EA xx
∂σε∂
∇ = = ∫ ∫
( )2
0
1, d2
l uK u u A xt
∂ρ∂
= ∫
( )t,xu
縦変位 x

作用の停留条件 ( ) ( ) ( )( )2
1
2
1
22 2
1 11
0
2 2
2 20 00
2 22
2
, , , , d
d d
d d d d 0
t
t
t l
t
t ll t t l
t tt
I u u u K u u U u u t
u u u uI A EA x tt t x x
u u u uA u x EA u t E A u x tt x t x
u uct x
∂ ∂ ∂ ∂δ ρ δ δ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ρ δ δ ρ δ∂ ∂ ∂ ∂
∂ ∂∂ ∂
∇ = − ∇
= −
= − − − =
⇒ =
∫
∫ ∫
∫ ∫ ∫ ∫
2 Ecρ
=
Hamilton の原理
波動方程式 波の速度
境界条件
変分制約

( ) ( )
( )
2
0 0
2
0
2 22
2 2
,
1 1, d d d2 2
1, d2
,
l l
pA
l
p
G rx
U u u A x GJ xx
K u u J xt
Gc ct x
∂θτ γ γ∂
∂θτγ∂
∂θρ∂
∂ θ ∂ θ∂ ∂ ρ
= =
∇ = =
=
= =
∫ ∫ ∫
∫
5.3 棒のねじり振動
断面2次極モーメント Jp=∫Ar2 dx 密度 ρ 横弾性係数 G の棒がねじり振動する場合を考える.
せん断応力 せん断ひずみ
( )t,xθねじり角変位
x

断面積 A 断面2次モーメント I 密度 ρ 縦弾性係数 E のはりが曲げ振動する場合を考える. Euler-Bernoulli はり(せん断変形無視, 断面の平面
保持)を仮定する.
( )
( )
2
2
222
20 0
2
0
,
1 1, d2 2
1, d2
l l
l
yM EIx
yU y y M dx EI xx
yK y y A xt
∂κ κ∂
∂κ∂
∂ρ∂
= = −
∇ = =
=
∫ ∫
∫
5.4 はりの曲げ振動
曲げモーメント 曲率
( )t,xy横変位 x

作用の停留条件
Hamilton の原理
( ) ( ) ( )( )2
1
2
1
22 2
1 11
2 2
2 2
2 20
2 3
2 300 0
, , , , d
d
d d d
t
t
t l
t
l ltl t t
t tt
I y y y K y y U y y t
y y y yI A EI x dtt t x x
y y y yA y x EI t EI y tt x x x
∂ ∂ ∂ ∂δ ρ δ δ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ρ δ δ δ∂ ∂ ∂ ∂
∇ = − ∇
= −
= − +
−
∫
∫ ∫
∫ ∫ ∫
2
1
2 4
2 40
2 4
2 4
d d 0
0
t l
t
y yA EI y x tt x
y yA EIt x
∂ ∂ρ δ∂ ∂
∂ ∂ρ∂ ∂
+ =
⇒ + =
∫ ∫
変分制約
境界条件
はりの運動方程式
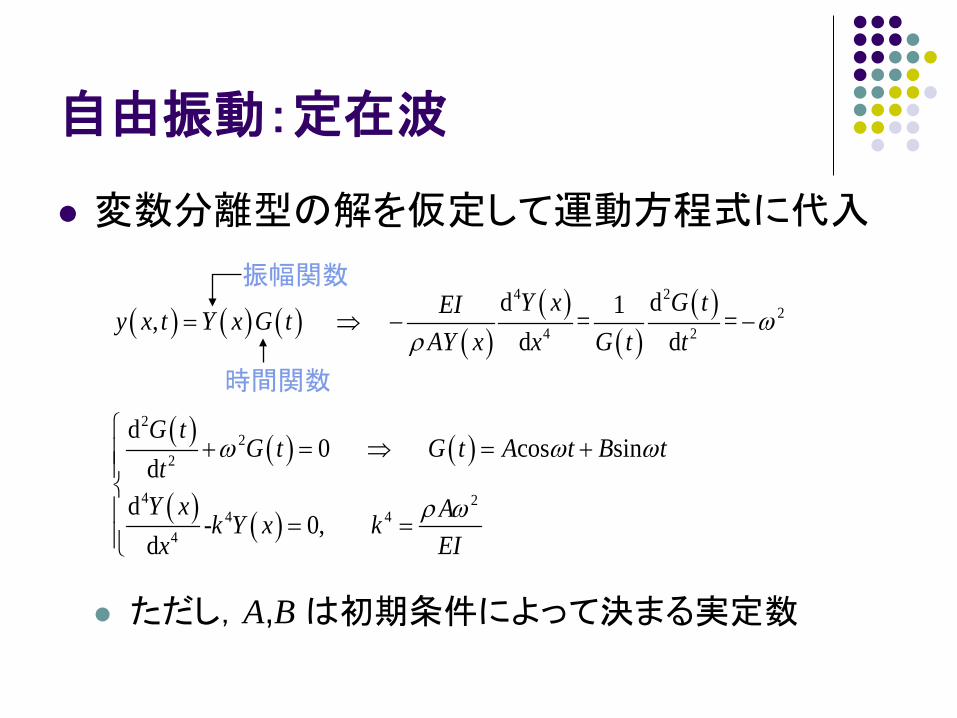
変数分離型の解を仮定して運動方程式に代入
ただし,A,B は初期条件によって決まる実定数
( ) ( ) ( ) ( )( )
( )( )
( ) ( ) ( )
( ) ( )
4 22
4 2
22
2
4 24 4
4
d d1, = =d d
d0 cos sin
dd
- 0, d
Y x G tEIy x t Y x G tAY x x G t t
G tG t G t A t B t
tY x Ak Y x kx EI
ωρ
ω ω ω
ρ ω
= ⇒ − −
+ = ⇒ = +
= =
自由振動:定在波
振幅関数
時間関数

振幅関数の一般解
基本解は cos kt, sin kt, cosh kt, sinh kt なぜならば したがって
C1, C2 , C3 , k は境界条件によって決まる.
d cosh d sinhd d 2 2
kx kx kx kxkx e e e ek k kxx x
− − + −= = =
自由振動:定在波(cont.)
1 大きさを決める定数が過剰
( ) ( ) ( )4
4 4 404
d- 0 0 ,
dxY x
k Y x Y x Y e k jk kx
λ λ λ= ⇒ = ⇒ − = ⇒ = ± ±
特性方程式
( ) [ ] [ ] [ ] [ ]1 2 3 4cos cosh cos cosh sin sinh sin sinhY x C kx kx C kx kx C kx kx C kx kx= + + − + + + −

両端固定の境界条件から C1, C2 , C3 , k を決定する.
( ) ( )
( ) ( )
2
1 22
23
2
3
d0 0 0 0d
sin sinh sin sinh 0d 0 sin sinh sin sinh 1 0d
0 sin sinh sin sinh det
1 0 sin sinh sin sinh
YY C Cx
kl kl kl kl CYY l lkl kl kl klx
C kl kl kl klkl kl kl
= = ⇒ = =
+ − = = ⇒ = − + − −
+ − ≠ ⇒ − + − −
( ) ( ) 3 4
4sin sinh 0
0 sin 0 1, 2, , 1r
kl klkl
rk kl k k r C Clπ
= − =
≠ ⇒ = ⇒ = = = = =
両端単純支持の場合
振動数方程式

固有振動モード関数
両端単純支持の場合(cont.)
( )( ) ( ) xl
rxkxY rr πsinsin ==
( )( )xY 1
( )( )xY 2
( )( )xY 3
( )( )xY 4

k(r) から固有円振動数 ωn(r) が決まる.
したがって,両端固定の場合の一般解は
初期条件が与えられている場合には
( ) ( )2 2
22
r rn
EI r EIkA l A
πω ωρ ρ
= = =
両端単純支持の場合の一般解
( ) ( ) ( ) ( ) ( )( )1
, cos sin sinr r r rn n
r
ry x t A t B t xlπω ω
∞
=
= +∑
( ) ( )( ) ( )
( ) ( )
( )( ) ( )
101
220
2 sin d,0 2,0 sin d
lr
lrr
n
rA g x x xy x g x l lry x g x B g x x xll
π
πω
== ⇒ = =
∫
∫

両端固定はりの場合
両端固定の境界条件から C1, C2 , C3 , k を決定する.
( ) ( )
( ) ( )
1 3
2
2
d0 0 0 0d
cos cosh sin sinh 0d 0 sin sinh cos cosh 1 0d
0 cos cosh sin sinh det 2 2
1 0 sin sinh cos cosh
YY C Cx
kl kl kl kl CYY l lkl kl kl klx
C kl kl kl klkl kl kl kl
= = ⇒ = =
− − = = ⇒ = − − −
− − ≠ ⇒ = − − − −
cos cosh 0
cos cosh 1
kl kl
kl kl
=
⇒ = 振動数方程式(代数的に解けない)

両端固定はりの場合(cont.)
振動数方程式を解く.
固有振動モード関数
( ) ( )( ) ( )
( ) ( )
( ) ( ) ( )
( ) ( ) ( ) ( )( ) ( )
2
1 2 3
4
1 22 2
sin sinhcos cosh 1 , 1, 2, , cos cosh
4.730041 7.853205 10.995608, , ,
2 114.137166 , , 12
1.01781 ,
r rr r
r r
r
k l k lkl kl k k r Ck l k l
k k kl l l
rk k r
l lC C
π
−= ⇒ = = = −
−
= = =
+= ≈ >>
= − = −
( ) ( )
( ) ( )
3 42 2
2
0.999223 , 1.00003 , 0.999999 ,
1 5r
C C
C r
= − = −
≈ >
( ) ( ) ( ) ( ) ( )( ) ( ) ( )( )2 cos cosh sin sinhr r r r r rY x C k x k x k x k x= − + −

両端固定はりの場合(cont.)
固有振動モード関数
( )( ) ( ) ( ) ( )( ) ( ) ( )( ) ( ),2,1 sinhsincoshcos2 =−+−= rxkxkxkxkCxY rrrrrr
( )( )xY 1
( )( )xY 2
( )( )xY 3
( )( )xY 4
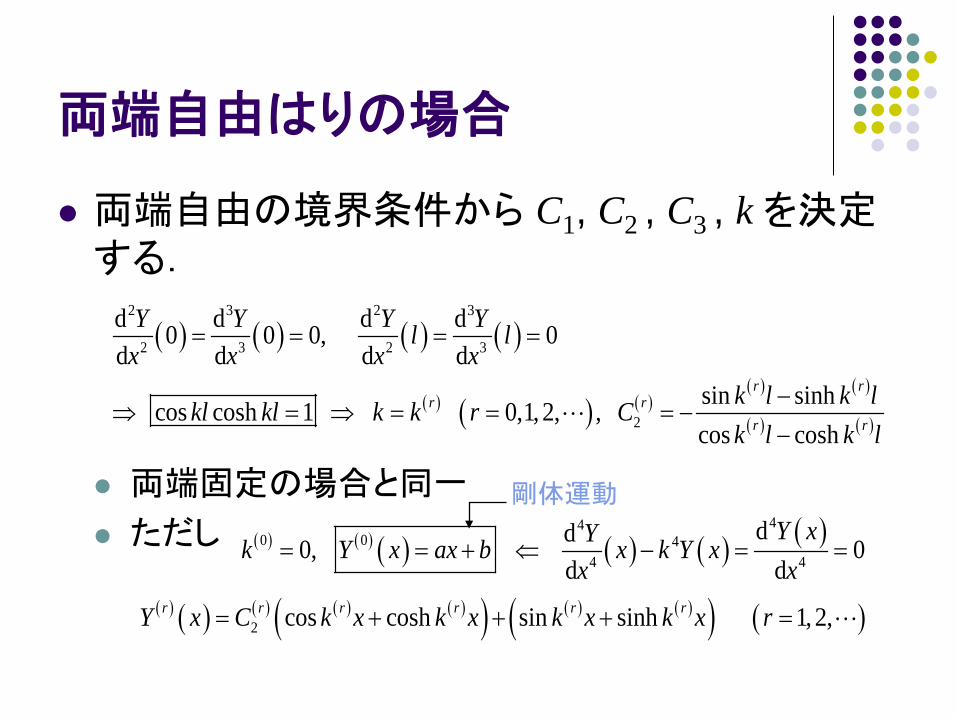
両端自由はりの場合
両端自由の境界条件から C1, C2 , C3 , k を決定する. 両端固定の場合と同一 ただし
( ) ( ) ( ) ( )
( ) ( ) ( )( ) ( )
( ) ( )
2 3 2 3
2 3 2 3
2
d d d d0 0 0, 0 d d d d
sin sinh cos cosh 1 0,1, 2, , cos cosh
r rr r
r r
Y Y Y Yl lx x x x
k l k lkl kl k k r Ck l k l
= = = =
−⇒ = ⇒ = = = −
−
剛体運動
( ) ( ) ( ) ( ) ( )( ) ( ) ( )( ) ( )2 cos cosh sin sinh 1, 2,r r r r r rY x C k x k x k x k x r= + + + =
( ) ( ) ( ) ( ) ( ) ( )440 0 4
4 4
dd0, 0d d
Y xYk Y x ax b x k Y xx x
= = + ⇐ − = =
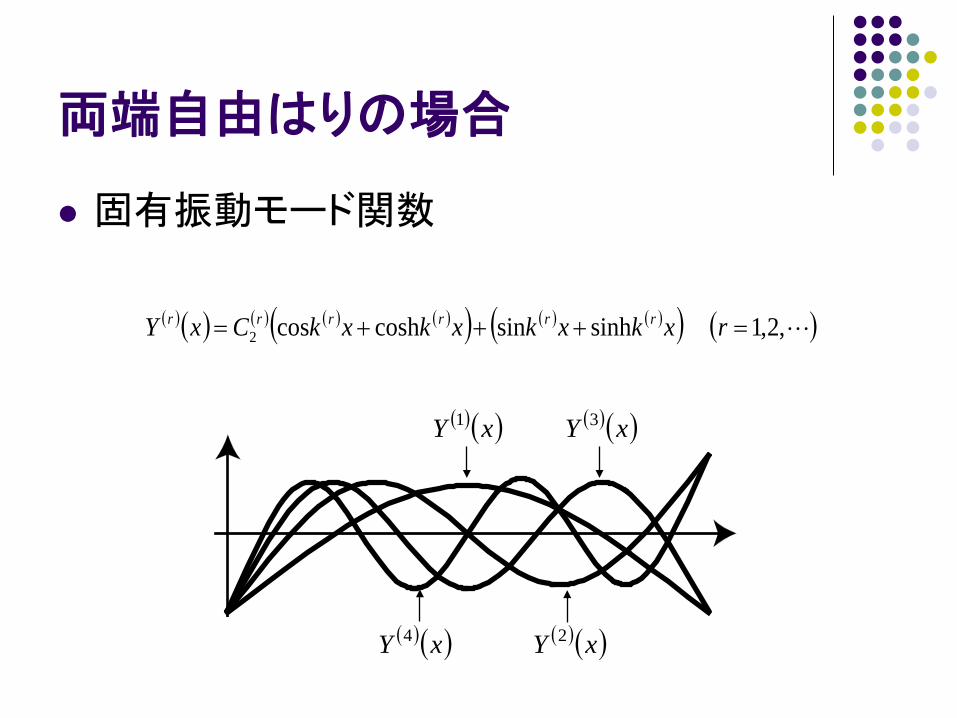
両端自由はりの場合
固有振動モード関数
( )( ) ( ) ( ) ( )( ) ( ) ( )( ) ( ),2,1 sinhsincoshcos2 =+++= rxkxkxkxkCxY rrrrrr
( )( )xY 1
( )( )xY 2
( )( )xY 3
( )( )xY 4
5.5 連続体の運動方程式
準備 ベクトル a∈Rn のテンソル表示:ai
総和規約:
偏微分表記:
1
n
i ij j i ij jj
c a b c a b=
= ⇒ =∑
free index
dummy index
i,i
axa
≡∂∂

連続体の運動方程式
変位 u(x,t) ひずみ εij(x,t) 応力 σij(x,t) の関係
連続体内部の運動方程式
連続体境界の運動方程式
( )( ) ( )( ) ( )( ) ( ) ( )( ), ,1, , , , , , 2ij ijkl kl kl k l l ku x t C u x t u x t u x t u x tσ ε ε= = +
体積力 慣性力
復元力
境界力
変位規定境界
( )( ) ( ) ( ), , , , , ij j i iu x t f x t u x t xσ ρ+ = ∈Ω
( )( ) ( ) 1 0, , , \ij j iu x t p x t xσ ν = ∈Γ = Γ Γ
外向き単位法線
連続体の運動方程式(cont.)
自由振動(同次形)の一般解の形
固有振動方程式
( ) ( ), tu x t U x eλ=
振動固有値
固有値問題
固有振動モード関数
( )( ) ( )
( )( )
2,
1
,
0,
ij j i
ij j
U x U x x
U x x
σ λ ρ
σ ν
= ∈Ω = ∈Γ

車体の固有振動 車体の8次固有振動モー
ド (53Hz) 車体の10次固有振動
モード (64Hz)
モデル提供:三菱自動車工業(株)





![NECファクトリコンピュータ ShieldPRO N22A耐振動 ※3 2 [ランダム波] 周波数20Hz~1000Hz:0.04G /Hz 周波数1000Hz~2000Hz:-6dB/Octave 動作時 正弦波加振](https://img.pdfslide.tips/doc/110x75/60e46555758e70028c3bfac6/necfffffff-shieldpro-n22a-eoe-a3-2-ffff.jpg)