Embed Size (px)
Citation preview

CALIBRACIÓN DEL DISPOSITIVO DE IMPACTO POR PROYECCIÓN VERTICAL DE MASA PARA LA REALIZACIÓN DE PRUEBAS A FATIGA POR IMPACTO
JUAN SEBASTIAN OSORIO ARCILA
UNIVERSIDAD DE LOS ANDES
FACULTAD DE INGENIERIA
DEPARTAMENTO DE INGENIERÍA MECÁNICA
BOGOTÁ D.C
2013

CALIBRACIÓN DEL DISPOSITIVO DE IMPACTO POR PROYECCIÓN VERTICAL DE MASA PARA LA REALIZACIÓN DE PRUEBAS A FATIGA POR IMPACTO
JUAN SEBASTIAN OSORIO ARCILA
Proyecto de grado para optar al título de Pregrado en Ingeniería Mecánica
Asesor:
Juan Pablo Casas Rodriguez. Ph.D. M.Sc. Ing. Profesor Asistente
UNIVERSIDAD DE LOS ANDES
FACULTAD DE INGENIERIA
DEPARTAMENTO DE INGENIERÍA MECÁNICA
BOGOTÁ D.C
2013

Índice general
Contenido
1-Introducción ............................................................................................................... 6
1.1-Contexto .............................................................................................................. 6
1.2-Antecedentes ........................................................................................................ 7
1.2.1-Caracterización dinámica de estructuras celulares hexagonales ........................... 7
1-2-2Pruebas de fatiga por impacto en juntas con adhesivo ........................................ 7
1.3-Objetivos .............................................................................................................. 7
1.3.1-Objetivo General ............................................................................................. 7
1.3.2-Objetivos específicos ....................................................................................... 7
2-Marco teórico .............................................................................................................. 8
3-Funcionamiento de los dispositivos ............................................................................... 9
3.1-Funcionamiento Dispositivo de Impacto por Proyección Vertical de Masa (DIPVM) ...... 9
3.2-Funcionamiento de dispositivo complementario para pruebas de impacto por tensión 12
4-Ajustes realizados ...................................................................................................... 13
4.1-Soporte para sensor de contacto de final de carrera ............................................... 13
4.2-Soportes para la variación de la posición de los actuadores neumáticos ................... 14
4.3-Soporte para la variación de la posición del sensor laser LDSM 90/40 ...................... 16
5-Experimentos de calibración ....................................................................................... 18
5.1-Diseño experimento de calibración para pruebas por impacto a compresión ............. 18
5.2-Resultados experimento de calibración para pruebas por impacto a compresión ....... 20
5.2.1-Fuerza y posición .......................................................................................... 21
5.2.2-Esfuerzo deformación .................................................................................... 24
5.3-Diseño experimento de calibración para pruebas por impacto a tensión ................... 27
5.4-Resultados experimento de calibración para pruebas por impacto a tensión ............. 28
6-Protocolos de calibración ............................................................................................ 30
6.1-Protocolo de calibración general ........................................................................... 30
6.2-Protocolo de calibración para pruebas por impacto a compresión............................. 33
6.3-Protocolo de calibración para pruebas por impacto a tensión ................................... 34
7-Modelo dinámico ....................................................................................................... 34
7.1-Desarrollo del modelo .......................................................................................... 34
7.2-Implementacion del modelo en matlab© ............................................................... 35
7.2.1 código .......................................................................................................... 36
8-Conclusiones ............................................................................................................. 39
9-Recomendaciones...................................................................................................... 39
10-Bibliografia .............................................................................................................. 40

Índice de figuras
Figura 1. DIPVM y componentes.
Figura 2. Funcionamiento dispositivo a tensión.
Figura 3. Dispositivo para pruebas por tensión.
Figura 4. Soporte sensor de contacto final de carrera.
Figura 5. Actuadores neumáticos.
Figura 7. Soporte actuador construido.
Figura 8. Sensor laser de deformación.
Figura 9. Propuesta 1 para soporte sensor laser.
Figura 10. Propuesta 2 para soporte sensor laser.
Figura 11. Low velocity axial impact crushing performance of empty recyclable metal beverage
cans.
Figura 12. Energy absorption of a thin-walled cylinder with ribs subjected to axial impact.
Figura 13. Comportamiento de caucho silicona a tasas de deformación altas.
Figura 14. Probeta a compresión.
Figura 15. Fuerza en función de distancia para la prueba 1 (10 cm).
Figura 16. Fuerza en función de distancia para la prueba 2 (20 cm).
Figura 17. Fuerza en función de distancia para la prueba 3 (30 cm).
Figura 18. Esfuerzo en función de la deformación para la prueba 1.
Figura 19. Esfuerzo en función de la deformación para la prueba 2.
Figura 20. Esfuerzo en función de la deformación para la prueba 3.
Figura 21. Comparación de pruebas dinámicas y prueba cuasi-estática.
Figura 22. Cojín de caucho para pruebas a tensión.
Figura 23. Montaje para pruebas a tensión.
Figura 24. Fuerza en función del tiempo para las pruebas a tensión.
Figura 25. Tablero de control PLC.
Figura 26. Interfaz controlador.
Figura 27. Diagrama de flujo modelo dinámico.

Índice de tablas
Tabla 1. Condiciones para pruebas a compresión.
Tabla 2. Valores adquiridos prueba 1 (10cm).
Tabla 3. Valores adquiridos prueba 2 (20cm).
Tabla 4. Valores adquiridos prueba 3 (30cm).
Tabla 5. Condiciones para pruebas a tensión.
Tabla 6. Valores adquiridos prueba 1 a tensión.
Tabla 7. Valores adquiridos prueba 2 a tensión.
Tabla 8. Parámetros interfaz control.

1-Introducción
1.1-Contexto
En ingeniería la fatiga se considerada como la perdida de la integridad estructural en el tiempo
debido a la repetida aplicación de esfuerzos sobre un componente. La fatiga es considerada
de gran importancia, ya que ha observado que se produce falla en condiciones de cargas
alternativas o cíclicas menores a las que se requieren para que se produzca una falla por cargas
cuasi-estáticas. Este proyecto se ve enfocado en un caso especial de fatiga el cual ha sido poco
estudiado, la fatiga por impacto, la cual consiste de pequeños impactos a bajas velocidades
los cuales por si solos son insuficientes para causar la falla de un componente o estructura,
existe una diferencia considerable entre los efectos de la fatiga estándar y de la fatiga por
impacto de carga, en esta última se tiene en cuenta factores como la duración del impacto su
velocidad, y la energía generada en este.
Este proyecto se plantea con el fin de estandarizar un sistema de calibración para realizar
pruebas en el dispositivo de impacto por proyección vertical de masa, que permita realizar
pruebas para fatiga por impacto. Este dispositivo se encuentra en los laboratorios del
departamento de ingeniería mecánica de la universidad de los andes, y fue desarrollado como
tesis de maestría del ingeniero Diego Avendaño.
El DIPVM es una máquina que emplea la energía potencial de una masa guiada para deformar
una muestra a una baja velocidad de impacto. A continuación se describe el funcionamiento
del dispositivo, en principio se tiene un martillo de impacto el cual se posiciona verticalmente
arriba de la muestra a probar, la ubicación del martillo se realiza mediante un motor y una
transmisión por cadena sobre dos guías.
Una vez el martillo se ubica a la altura deseada, este se fija de manera manual mediante dos
prensas. La probeta se ubica en la zona de pruebas, la cual se encuentra debidamente
instrumentada, y se comienza la prueba al liberar el martillo. Después del impacto entre el
martillo y la probeta, se genera un rebote del martillo, el cual daría lugar a un segundo impacto
el cual se evita mediante un par de actuadores neumáticos.
Durante el impacto, se realiza la adquisición de las señales de fuerza y compresión de las
probetas, generadas en el evento.

1.2-Antecedentes
Con anterioridad a este trabajo se realizaron dos proyectos, en los cuales se diseñaron y
manufacturaron los dispositivos que se usaran a lo largo de este proyecto.
1.2.1-Caracterización dinámica de estructuras celulares hexagonales
Diego Fernando Avendaño Rodríguez
Este proyecto se realizó con el propósito de ampliar el análisis de un tipo de honeycomb
comercial de aluminio en el rango dinámico, obteniendo modelos analíticos y numéricos de
este material en particular, los cuales permitirán predecir su comportamiento en condiciones
dinámicas.
Para esto se empleó un diseño experimental, que permitiera la aplicación de impactos de baja
velocidad. Con el objetivo de desarrollar los experimentos pertinentes se diseñó y construyó
el dispositivo de impacto por proyección vertical de masas.
1-2-2Pruebas de fatiga por impacto en juntas con adhesivo
Luis Felipe Gómez Solarte
Se planteó un protocolo inicial que permitiera realizar pruebas a fatiga por impacto en el
dispositivo de impacto por proyección vertical de masa, para esto se diseñó, construyo e
implemento un dispositivo complementario al DIPVM que permitiera realizar pruebas a fatiga
por impacto con el fin de caracterizar juntas con adhesivo.
1.3-Objetivos
1.3.1-Objetivo General
Elaborar un protocolo de calibración del DIPVM que permita realizar de una manera más
eficiente pruebas de fatiga por impacto
1.3.2-Objetivos específicos
Realizar los ajustes pertinentes a la máquina.
Elaborar un manual de calibración del DIPVM

Realizar un modelo teórico que evidencie las diferentes variables a tener en cuenta al
momento de la operación del dispositivo.
2-Marco teórico
En el campo de la ingeniería la fatiga es considerada como un fallo en la integridad estructural
de un componente o estructura debido a la repetida o continua aplicación de esfuerzos sobre
este en un periodo de tiempo. Aunque es posible entender la fatiga como la respuesta a un
esfuerzo constante, se asocia comúnmente a un esfuerzo cíclico variable. La importancia de
estudiar la fatiga radica en que se ha observado que se puede producir falla en condiciones
de cargas cíclicas considerablemente menores a las que se requieren para que se produzca
una falla por cargas cuasi-estáticas. El problema de fatiga es común en la mayoría de tipos de
materiales y se estima que alrededor del 80% de las falla en ingeniería se deben a falla por
fatiga. El costo de estas fallas no es únicamente económico sino que desencadena en lesiones
o muerte de personas como consecuencia de estas, esto ha incentivado el estudio del tema
para entender cómo funciona el fenómeno de fallas por fatiga y desarrollar modelos para
predecir la vida útil a fatiga. Aunque la mayoría de los estudios realizados se ocupan de
estudiar el comportamiento de los metales se ha presentado un crecimiento en el estudio de
fatiga en polímeros y compuestos de polímeros. Aunque estos materiales comparten muchas
características, también se encuentran algunas diferencias importantes en el comportamiento
de estos materiales, como la naturaleza visco elástica de muchos polímeros la cual afecta su
respuesta a cargas repetitivas. Es de gran importancia las fuentes de carga a fatiga, estas
pueden ser divididas en estáticas, de trabajo, vibratorias y accidentales. Es importante hacer
una distinción entre fatiga de un número de ciclos elevados (FCE) y la fatiga de un número de
ciclos bajo (FCB). FCE es considerado un evento que ocurre millones de veces en la vida útil de
un componente con una respuesta usualmente elástica, como las vibraciones. En el cado del
FCB, este implica únicamente miles de ciclos, pero comúnmente está más relacionada con una
respuesta predominantemente plástica.
Ya que este proyecto no se ve enmarcado únicamente en el campo de la fatiga sino de una
manera más específica en la fatiga por impacto, se realizara una revisión de los
procedimientos para evaluar el desempeño de los materiales al impacto. Estos estudian la
respuesta de los diversos materiales a factores como velocidad, fuerza y dirección del impacto
algunos de estos han sido adoptados como estándares y se diferencian los impactos de

acuerdo a su velocidad, para tasas de velocidad baja y media se tienen dispositivos como lo
son los dispositivos de péndulo de martillo y dispositivos de proyección de masa. Para tasas
de velocidad alta se disponen de dispositivos como la barra Hopkinson.
Los métodos usando el péndulo de matillo son las técnicas más usuales para impactos a baja
velocidad. Aunque las normas suelen recomendar que se realícenlas pruebas en máquinas de
impacto de péndulos de martillo, considerado uno de los métodos tradicionales y por
consecuente más usados, otros trabajos han adoptado realizar sus pruebas de impacto en
máquinas de impacto por caída de masa (DWIT). Los dispositivos de impacto por caída de
masa permiten realizar un conjunto de pruebas diferentes las realizadas con las técnicas más
tradicionales, como es el caso que atañe a este proyecto, el de implementar mejoras que
permitan realizar pruebas a fatiga por impacto en el DIPVM.
3-Funcionamiento de los dispositivos
A continuación se explica el funcionamiento de los dispositivos diseñados en los trabajos
anteriores, que fueron de interés en el desarrollo de este proyecto.
3.1-Funcionamiento Dispositivo de Impacto por Proyección Vertical de Masa
(DIPVM)
En la figura 1 se ve un esquema general de la máquina y sus componentes los cuales se
encuentran enumerados, esta numeración se utiliza en la explicación del funcionamiento del
dispositivo que se encuentra a continuación.
Dos columnas verticales (1), sujetas a una base, direccionan el movimiento del martillo (2).
Con el objetivo de poder generar impactos a diferentes niveles de energía la cual se varia
cariando la altura del martillo, el martillo puede ser posicionado a diferentes alturas mediante
el sistema de disparo, el cual está constituido por una torreta de lanzamiento que tiene un
sistema de prensas axiales (3), las cuales se usan para ajustar la posición del mecanismo. Un
cilindro neumático (7) mantiene el martillo en posición hasta que se desea dar inicio al
experimento. En la parte media de la máquina se encuentra la zona de pruebas, en donde
diferentes tipos de probetas pueden ser posicionadas para ser probadas bajo condiciones de
impacto a compresión (4). El control y la supervisión de la máquina, se conjugan en un tablero
de control, el cual aloja: un disyuntor general con protección termo-magnética, un conjunto

de contactores que relevan las señales según los comandos programados en un PLC marca
Mitsubishi FX3G de 14 entradas y 10 salidas digitales, expandible y con comunicación
Ethernet, además de un variador de velocidad marca Mitsubishi FR-D720 de 0.75 hp. El tablero
incluye un transformador de 220 V a 110 V con el fin de suministrar energía a todos los
elementos y al motor. Adicionalmente, cuenta con una fuente de 24 V DC para: las señales del
PLC, la alimentación del láser de media distancia y el amplificador de los piezoeléctricos. Una
fuente de ±15 V DC alimenta el láser de alta precisión que mide la compresión de la probeta
(10). Todo el sistema puede ser operado de forma manual o automática y el motor puede ser
accionado manualmente mediante dos mecanismos: desde las botoneras del tablero de
control o mediante una botonera remota. Para cualquiera de estos casos el sistema de disparo
puede ser ubicado en la altura de liberación deseada.
Figura 1. DIPVM y componentes.

La unidad motriz está compuesta por un motor-reductor cónico helicoidal Bauer (5) referencia
BK20-11-D08MA4/L5N, de 3/4hp, relación 76.79/1, a 22 rpm, con eje solido Ø35x70mm, el
cual incluye un freno electromagnético. El sistema cuenta con la función de retornar
automáticamente el martillo al estado inicial, luego de haber realizado un impacto. La
transmisión del motor al martillo se realiza mediante una cadena doble ANSI 40 (6). El sistema
neumático marca Micro, cuenta con un actuador de Ø25mm de diámetro y 25mm de carrera
ubicado en la torreta (7), que es utilizado como seguro de lanzamiento del martillo y dos
actuadores neumáticos de Ø40mm y 30mm de carrera ubicados en la zona de pruebas de la
máquina, que evitan que el martillo rebote sobre la probeta después del primer impacto (8).
Dos válvulas con solenoide VM18-5/2-1/4 2ME 24VCC, fueron seleccionadas para controlar el
accionamiento de los cilindros neumáticos. Tres tipos de sensores de adquisición son
empleados en el dispositivo de impacto: El operario tiene la lectura de la altura del martillo,
mediante la señal de un sensor láser Sick DT60 de media distancia, ubicado en la parte superior
de la máquina (9). Un sensor de precisión láser LDSM 90/40 con un rango de 40mm y una
resolución de 0.04 mm indica la compresión de la probeta durante el ensayo (10). Finalmente,
cuatro piezoeléctricos marca Kistler referencia 9212 (4), con un rango de medición de 5000lbf
(22241 N) cada uno, envían la señal de fuerza del impacto. Los piezoeléctricos están
conectados a un módulo sumador de las señales y les da salida por un cable BNC a un
amplificador de señales 5018A1010 que adecua la señal entre 0 y 10 V y luego la envía
mediante un cable BNC1601B al sistema de adquisición de datos.
68 En el sistema de adquisición, las señales de los sensores piezoeléctricos y el láser de
precisión son enviados a un módulo marca National Instruments cDAQ-9174, y una tarjeta de
adquisición NI9222, 4-Ch, ±10 V, 16-Bit, de 500 kS/s y de allí son tratadas y registradas
mediante una interfaz hombre-máquina creada en LabVIEW®. Desde este programa pueden
controlarse los parámetros de adquisición de la máquina y pueden obtenerse las gráficas de
fuerza contra tiempo y desplazamiento contra tiempo. Mediante un protocolo de
comunicación OPCserver de National Instruments se establece la información entre el PLC y
el computador.
El equipo cuenta con cuatro sensores de supervisión: el primero es un sensor tipo inductivo
(12) y se emplea para indicar al control que la máquina está en posición de disparo. Un sensor
de contacto de final de carrera el cual le indica al control que detenga el motor una vez el
martillo ha sido posicionado. Adicionalmente se tiene un sensor tipo auto-réflex (envío y

recepción de haz de luz) para detectar el paso del martillo en un punto cerca de la zona de
impacto (esta señal es opcional para activar una cámara de alta velocidad). Finalmente, seis
sensores de posición para los cilindros neumáticos (dos para cada cilindro, el de activación del
martillo y los dos anti rebote).
3.2-Funcionamiento de dispositivo complementario para pruebas de impacto
por tensión
El propósito del dispositivo es transformar un movimiento en la dirección de compresión en
un movimiento que permita realizar pruebas a tensión figura 2, para esto se construyó un
dispositivo que mantiene fija la parte superior de la probeta y transmite el impacto a la parte
inferior de esta como se muestra en la figura 3. El dispositivo fue diseñado y manufacturado
con los recursos presentes en la universidad, y se acopla de manera adecuada con los
componentes necesarios del DIPVM.
Figura 2. Funcionamiento dispositivo a tensión. [4]

Figura 3. Dispositivo para pruebas por tensión. [5]
4-Ajustes realizados
Con el fin de mejorar el funcionamiento general del DIPVM se realizó una revisión general de
su estado, en la cual se evidencio que el estado general de los tornillos de la maquina no era
el adecuado, por lo cual se realizó un cambio de la mayoría de estos. En adición a esto se
determinó que se debía cambiar el soporte del sensor de contacto de final de carrera, y
diseñar soportes complementarios para los actuadores neumáticos y el sensor laser LDSM
90/40, para poder acoplar adecuadamente el dispositivo para pruebas por fatiga en adhesivos.
4.1-Soporte para sensor de contacto de final de carrera
La pieza que originalmente servía como soporte al sensor de contacto de final de carrera,
carecía de integridad estructural y de no haber sido reemplazada se habría presentado una
falla que afectaría el comportamiento de la máquina, por este motivo se elaboró un soporte
que mantuviera el sensor unido a la máquina de una manera más estable (figura 4).

Figura 4. Soporte sensor de contacto final de carrera.
4.2-Soportes para la variación de la posición de los actuadores neumáticos
Con el objetivo de cambiar la posición de los actuadores neumáticos que evitan el rebote
(figura 5), se diseñaron y construyeron unos soportes que pueden variar su posición de
acuerdo a la posición del dispositivo para pruebas a tensión.
Figura 5. Actuadores neumáticos.

Figura 6. Diseño inicial soporte actuador.
Figura 7. Soporte actuador construido.

Para el elemento diseñado se tomó como referencia el punto máximo de desde donde se
puede disparar el martillo el cual es de 1 m, con este dato y se calcula teóricamente una fuerza
máxima suponiendo un tiempo de contacto de 0.05 ms para el impacto. Las siguientes
ecuaciones muestran el proceso básico de diseño.
𝑣 = √2𝑔ℎ = √2 ∗ 9,8𝑚
𝑠2∗ 1𝑚 = 4,43
𝑚
𝑠 (𝑒. 1)
𝐹 = 𝑚. 𝑎 = 𝑚𝑑𝑣
𝑑𝑡= 13,9𝑘𝑔
4,43𝑚/𝑠
0,00005𝑠= 1,23𝑀𝑁 (𝑒. 2)
𝜎 =𝐹
𝐴=
1,23𝑀𝑁
0,03𝑚= 41𝑀𝑃𝑎 (𝑒. 3)
𝐹. 𝑆 =𝜎𝑦
𝜎=
205𝑀𝑃𝑎
41𝑀𝑃𝑎= 5 (𝑒. 4)
El soporte se fabricó con los recursos de laboratorios que se encuentran en la Universidad de
los Andes, con el CNC fadal las piezas que necesitaban de mayor precisión y con diferentes
maquinas herramienta las que requerían de una precisión menor.
4.3-Soporte para la variación de la posición del sensor laser LDSM 90/40
Para poder realizar mediciones de deformación con el dispositivo de pruebas a tensión, es
necesario construir un soporte que permita variar la altura del sensor de deformación (figura
8), para desarrollar de manera adecuada esta pieza es necesario hacer un análisis de
vibraciones de la máquina y determinar cómo estas afectan la medición del sensor de
deformación, sin embargo en este proyecto se plantea el bosquejo de dos alternativas que a
futuro se pueden desarrollar completamente.

Figura 8. Sensor laser de deformación.
La primera alternativa que se propone es un montaje que soporte el sensor desde la pared q
se encuentra en la parte posterior de la máquina.
Figura 9. Propuesta 1 para soporte sensor laser.
La segunda propuesta plantea sujetar el soporte de la base de la máquina y de la guarda
protectora de esta, implementando algún tipo de aislante de vibraciones en los puntos de
contacto con la estructura.

Figura 10. Propuesta 2 para soporte sensor laser.
5-Experimentos de calibración
Con el fin de encontrar una prueba repetible y simple que permitiera evaluar el
comportamiento del dispositivo se desarrollaron los siguientes experimentos.
5.1-Diseño experimento de calibración para pruebas por impacto a compresión
Al buscar información en las normas estándar, no se encontró ninguna normativa que regulara
experimentos que se pudieran realizar en las condiciones de espacio, tipo de impacto, y
niveles de energía entregados. Por consiguiente se prosiguió a buscar en la literatura
especializada algún tipo de experimento que fuera fácilmente repetible y permitiera
corroborar el buen comportamiento de la máquina. Entre la literatura revisada se encontraron
dos pruebas que podrían ser realizadas en las condiciones de operación de la máquina,
primero se tiene el ``Energy absorption of a thin-walled cylinder with ribs subjected to axial
impact.`` de Tadaharu Adachi (2007) el cual plantea realizar impactos a diferentes velocidades
en unos cilindros con anillos que concentran esfuerzos (figura 12), por otra parte Sivakumar
Palanivelu(2011) en ``Low velocity axial impact crushing performance of empty recyclable

metal beverage cans.`` plantea una serie de pruebas en latas recicladas de aluminio (figura
11).
Figura 11. Low velocity axial impact crushing performance of empty recyclable metal beverage
cans. [8]
Figura 12. Energy absorption of a thin-walled cylinder with ribs subjected to axial impact. [9]
En última instancia se decidió no utilizar ninguna de estas pruebas como prueba de
calibración, debido a la poca información suministrada en cuanto a la posibilidad de repetición
del experimento. Por lo tanto se decidió buscar un elastómero comercial con el que se
pudieran fabricar piezas con facilidad y encontrar otras maneras de validar los resultados.
Finalmente se fabricaron probetas en caucho a base de silicona. Se realizaron diferentes
probetas para al final realizar las pruebas definitivas con una probeta cilíndrica de 55.8 mm
de longitud por 55,3 mm de diámetro, con una base de 5 mm que permite agarrar la probeta
a la base mediante agarraderas plásticas figura 14.

Figura 13. Comportamiento de caucho silicona a tasas de deformación altas. [10]
Figura 14. Probeta a compresión.
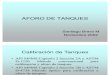
5.2-Resultados experimento de calibración para pruebas por impacto a
compresión
Para recolectar los datos necesarios para la calibración se realizaron 3 tipos de pruebas, en la
tabla 1 se encuentras los parámetros relacionados a las pruebas.

Repeticiones Altura (m) v (m/s) E (J) ɛ˙ (s-1)
Prueba 1 30 0,1 1,40 13,7 28
Prueba 2 30 0,2 1,98 27,4 39
Prueba 3 30 0,3 2,42 41,2 48
Tabla 1. Condiciones para pruebas a compresión.
5.2.1-Fuerza y posición
El siguiente juego de ecuaciones permite estimar valores para la velocidad, la posición, y la
energía en función de la fuerza medida a lo largo del tiempo.
𝑣𝑖 = 𝑣𝑖−1 − ∆𝑡 (𝐹𝑖−1 + 𝐹𝑖
2𝑚− 𝑔) (𝑒5)
𝑑𝑖 = 𝑑𝑖−1 + ∆𝑡 (𝑣𝑖−1 + 𝑣𝑖
2) (𝑒6)
𝐸𝑖 = 𝐸𝑖−1 + ∆𝑡 ((𝐹𝑣)𝑖−1 + (𝐹𝑣)𝑖
2) (𝑒7)
En las siguientes graficas se verán la fuerza en función de la posición, las curvas azules
corresponde al comportamiento de la posición según la ecuación 6, y las curvas naranjas
corresponden a la posición adquirida por el dispositivo.
Distancia calculada (mm) 28,62
Distancia medida (mm) 28,02
Error distancia (%) 2,13
Energía calculada (J) 17,65
Energía teórica (J) 13,72
Error energía (%) 22,25
Tabla 2. Valores adquiridos prueba 1 (10cm).

Figura 15. Fuerza en función de distancia para la prueba 1 (10 cm).
En las tablas 2, 3 y 4 se ven los valores adquiridos con las ecuaciones 5, 6 y 7 y sus porcentajes
de erros respecto a los valores adquiridos en el caso de la distancia y respecto a los valores
teóricos en el caso de la energía.
Distancia calculada (mm) 32,38
Distancia medida (mm) 28,02
Error distancia (%) 15,54
Energía calculada (J) 31,88
Energía teórica (J) 27,44
Error energía (%) 13,93
Tabla 3. Valores adquiridos prueba 2 (20cm).

Figura 16. Fuerza en función de distancia para la prueba 2 (20 cm).
Los valores calculados no son exactos a los medidos o a los teóricos, sin embargo, arrojan un
poco de validez a los experimentos al encontrarse todos los resultados en los mismos ordenes
de magnitud y con errores considerablemente bajos.
Distancia calculada (mm) 34,38
Distancia medida (mm) 28,02
Error distancia (%) 22,69
Energía calculada (J) 45,88
Energía teórica (J) 41,16
Error energía (%) 10,28
Tabla 4. Valores adquiridos prueba 3 (30cm).

Figura 17. Fuerza en función de distancia para la prueba 3 (30 cm).
5.2.2-Esfuerzo deformación
Con los datos adquiridos se realizaron graficas de esfuerzo y deformación para las 3 pruebas,
las figuras 18, 19 y 20 presentan el comportamiento promedio de cada prueba y un margen
de error estimado como dos veces la desviación estándar de la medición.

Figura 18. Esfuerzo en función de la deformación para la prueba 1.
Figura 19. Esfuerzo en función de la deformación para la prueba 2.

Figura 20. Esfuerzo en función de la deformación para la prueba 3.
La figura 21 presenta el comportamiento general exhibido en las 3 pruebas (figuras 18, 19 y
20) , y lo comparan con una prueba cuasi-estática realizada a la misma probeta, el
comportamiento de las gráficas es coherente entre si ya que al encontrarse a tasas de
deformación en el rango de 101 s-1, es de esperar que las gráficas tengan la misma tendencia
al no haber un cambio significativo en la tasa de deformación, a su vez al comparar las pruebas
dinámicas con la prueba cuasi estática se evidencia una clara diferencia en el comportamiento
de estas, como se esperaba según la información suministrada en la figura 13.

Figura 21. Comparación de pruebas dinámicas y prueba cuasi-estática.
5.3-Diseño experimento de calibración para pruebas por impacto a tensión
Para el experimento de calibración del dispositivo de pruebas a tensión se decidió realizar las
pruebas únicamente con un cojín de caucho silicona que evitara el impacto metal contra metal
el cual resulta en una desaceleración mucho más rápida y aumenta la magnitud de la fuerza
del impacto. En adición a esto se montó una barra de aluminio de 15 cm en el dispositivo que
permitía mantener una altura fija de este.
Figura 22. Cojín de caucho para pruebas a tensión.

Figura 23. Montaje para pruebas a tensión.
5.4-Resultados experimento de calibración para pruebas por impacto a tensión
Para las pruebas a tensión se realizaron dos tipos de prueba con 20 repeticiones cada una, las
pruebas a tensión se realizaron a valores de energía mucho menores y no tuvieron en cuenta
las mediciones de posición ya que el sensor de posición no se encuentra disponible para este
tipo de pruebas aun.
Repeticiones Altura (m) v (m/s) E (J)
Prueba 1 20 0,025 0,70 3,4
Prueba 2 20 0,04 0,89 5,5
Tabla 5. Condiciones para pruebas a tensión.
Al no tener mediciones de distancia para este caso, se reporta el valor calculado de la distancia
(tablas 6 y 7 ) como un valor que respalde la lógica de las mediciones al ser considerablemente
menores los valores presentadas que el espesor del cojín.

Distancia calculada (mm) 3,14
Energía calculada (J) 3,86
Energía teórica (J) 3,43
Error energía (%) 11,15
Tabla 6. Valores adquiridos prueba 1 a tensión.
Distancia calculada (mm) 4,42
Energía calculada (J) 6,08
Energía teórica (J) 5,49
Error energía (%) 9,75
Tabla 7. Valores adquiridos prueba 2 a tensión.
La figura 24 muestra el comportamiento adquirido en las 2 pruebas, como se puede observar
en la figura se presenta un comportamiento cercano a simétrico, lo cual implica que la energía
entregada a la probeta no se perdió en deformación permanente si no que en cambio fue
devuelta casi en su totalidad al martillo impactor.
Figura 24. Fuerza en función del tiempo para las pruebas a tensión.

6-Protocolos de calibración
Con el fin de proporcionar una herramienta que permita a futuros usuarios del dispositivo
comprender el funcionamiento de este, se desarrolló un protocolo donde se explican, paso a
paso, los procedimientos que se deben realizar para que el dispositivo funcione de manera
adecuada.
6.1-Protocolo de calibración general
Precauciones de seguridad general
Al tratarse de un máquina de impacto, con una gran cantidad de piezas, sensores y accesorios,
es necesario que al realizar cualquier actividad en la maquina se le dedique la mayor
concentración posible, ya que de no hacerlo podría resultar en un fallo de la máquina, o aun
peor en una lesión para el usuario. Se debe operar la maquina con gafas de seguridad y overol
en todo momento, nunca se debe realizar una prueba con la guarda de protección de la
maquina abierta y se deben seguir las instrucciones que se encuentran a continuación con el
objetivo de realizar una prueba segura que arroje resultados confiables.
Limpiar y lubricar
Limpiar los sensores ópticos y la maquina en general, lubricar la cadena, y las guías.
Revisar conexiones
Revisar todas las conexiones del dispositivo, tanto las de los sensores a los dispositivos de
adquisición, como las de la red eléctrica, y las neumáticas que controlan el flujo de aire en la
máquina.
Energizar sistema
Sobre el tablero de control (figura 25), el cual provee de energía al sistema, se encuentra el
sistema de control PLC y variador de velocidad del motor, se deben colocar en posición de
encendido los 3 totalizadores ubicados en la esquina superior derecho. Además se debe iniciar
el computador que maneja el control, activar la fuente de voltaje regulada que se encarga de
energizar algunos componentes de la máquina, y finalmente conectar la tarjeta de adquisición
de datos.

Figura 25. Tablero de control PLC.
Presurizar sistema neumático
Se debe abrir la llave de la red de aire comprimido, se debe verificar sobre el manómetro que
la presión se encuentre a 80 psi, es importante recordar que de ser necesario cambiar o revisar
alguna conexión del circuito neumático se debe liberar el aire comprimido del sistema.
Implementar montaje requerido
Dependiendo de la necesidad del usuario se debe implementar ya sea el montaje para pruebas
a compresión, o el montaje para pruebas a tensión. Los montajes ya condiciones de prueba
para cada caso se explican en las secciones 6.2 y 6.3 de este documento respectivamente.
Manejo interfaz controlador
La interfaz (figura 26) es un programa de Labview se encarga de posicionar el martillo para el
impacto y de iniciar los ensayos. Sobre este programa se puede establecer el número de ciclos
que se van a realizar las pruebas, se puede establecer el tiempo sobre el cual se realizara
adquisición de datos, debido a que las celdas de carga pueden ser calibradas para un
determinado rango de adquisición se cuenta con una entrada para establecer este factor en
el programa, el programa cuenta con entradas como altura de probeta, se puede ingresar el

coeficiente de restitución, una desaceleración por fricción y finalmente se cuenta con un
factor de retardo de tiempo, en la tabla 8 se explica brevemente cada parámetro a tener en
cuenta.
Número de ciclos Indica el número de impactos que se desean llevar a
cabo en una prueba.
Tiempo (s) Tiempo de la adquisición de datos.
Factor de Calibración de celdas Factor de ajuste de las celdas de carga.
Altura de la Probeta (mm) Altura de la probeta montada
Coeficiente de restitución
Es una relación entre la energía entregada a la
probeta y la energía devuelta por esta
Desaceleración por fricción (m/s2)
Valor de las pérdidas por fricción estimado en
función de la pérdida de aceleración.
Factor de retardo de tiempo
Tiempo de retardo de salida de los cilindros
neumáticos, dado que los impactos producen un
rebote, se debe evitar un segundo impacto
mediante la salida de los cilindros.
Tabla 8. Parámetros interfaz control.

Figura 26. Interfaz controlador.
Revisiones finales
Revisar que la botonera remota funcione adecuadamente incluyendo las paradas de
emergencia. Revisar que el computador este recibiendo adecuadamente la señal del control.
Al finalizar las pruebas se debe desconectar la fuente de voltaje, el computador y la tarjeta de
adquisición, se debe apagar el PLC se debe dejar el martillo reposado y el circuito neumático
despresurizado.
6.2-Protocolo de calibración para pruebas por impacto a compresión
La parte variable del montaje para las pruebas a compresión consiste en instalar los
actuadores neumáticos sin los soportes complementarios y en instalar las celdas de carga en
la placa de impacto simple, es importante recordar que las celdas se deben apretar con un
torqui metro a un torque 18 Lbf.in (2Nm). También es de gran importancia posicionar de
manera adecuada el sensor de deformación ya que este tiene un rango de medición entre los
7 cm y los 11 cm, se debe revisar que el rango de mediciones deseadas se encuentre a la
distancia adecuada del sensor.

A continuación se debe posicionar la probeta para pruebas a compresión (figura 14) y fijarla a
la placa para impacto mediante agarraderas plásticas. Posteriormente se debe fijar la altura
del martillo según los parámetros de la tabla 1, se debe tener en cuenta que la caída del
martillo se ubica aproximadamente 1 cm por debajo de la posición fija de este. Realizar las
pruebas propuestas y revisar su validez en función de los resultados enunciados en los
numerales 5.2.1 y 5.2.2 del presente documento.
6.3-Protocolo de calibración para pruebas por impacto a tensión
La parte variable del montaje para las pruebas a tensión consiste en instalar los actuadores
neumáticos con los soportes complementarios y en instalar las celdas de carga en el
dispositivo para pruebas a tensión, es importante recordar que las celdas se deben apretar
con un torqui metro a un torque 18 Lbf.in (2Nm). Al momento no se deben tener en cuenta
los datos adquiridos por el sensor de deformación ya que este tiene un rango de medición y
un montaje actual que no permiten aplicarlo a esta prueba.
A continuación se debe posicionar el cojín para pruebas a compresión junto con la probeta
de aluminio (figura 23). Posteriormente se debe fijar la altura del martillo según los
parámetros de la tabla 5, se debe tener en cuenta que la caída del martillo se ubica
aproximadamente 1 cm por debajo de la posición fija de este. Realizar las pruebas propuestas
y revisar su validez en función de los resultados enunciados en el numeral 5.4 del presente
documento.
7-Modelo dinámico
Ene le marco del proyecto se desarrolló un modelo dinámico simple que permitiera evidenciar
como es el comportamiento del martillo en la caída.
7.1-Desarrollo del modelo
El modelo desarrollado busca encontrar un coeficiente de perdida dinámica (Cd) al comparar
el comportamiento ideal en caída libre (ecuaciones 8 y 9) y un comportamiento que contempla
perdida por resistencia del aire y por fricción dinámica (ecuaciones 10 y 11).

𝑚𝑔ℎ =1
2𝑚𝑣2 (𝑒8)
𝑎 = 𝑔 (𝑒9)
𝑚𝑎 = 𝑚𝑔 − 𝐶𝑑𝑣2 −1
2𝐶𝑎𝐴𝜌𝑣2 (𝑒10)
𝑎 = 𝑔 −𝑣2
2𝑚(2𝐶𝑑 − 𝐶𝑎𝐴𝜌) (𝑒11)
7.2-Implementacion del modelo en matlab©
Con el fin de lograr un análisis preciso de los datos se realizó un código que en función de la
gravedad, la masa, la velocidad inicial del martillo, el tiempo de la caída, la distancia total de
la caída y otros factores geométricos, arrojara un coeficiente de perdidas dinámicas (Cd). En
la figura 27 se encuentra un diagrama de flujo con el funcionamiento básico del código
Figura 27. Diagrama de flujo modelo dinámico.
El correcto funcionamiento del modelo no se pudo verificar ya que la adquirió de los datos de
posición del martillo no fue posible al momento de desarrollar este experimento. Para tener
un mejor entendimiento de cómo son las perdidas por fricción a lo largo de la caída se
recomienda implementar el código para diferentes alturas de caída del martillo.

7.2.1 código
Archivo: caida.m function d=caida(t,p) load g load c
d=[p(2); g-c*(p(2)^2)];
Archivo: caida_modelo.m clc clear all close all global g vi g=9.8; c=input('valor inicial de iteracion ') j=input('salto para iteracion ') vi=input('velocidad inicial en metros sobre segundo ') save c; save g; ca=1.17; m=13.9; pho=0.89; r=0.1; area=pi*r^2;
t_0=0; t_f=input('tiempo de caida en segundos ') p0=[0;vi]; save p0 pos_max=input('distancia recorrida en metros ') save pos_max
[t,p]=ode45('caida',[t_0,t_f],p0); h=max(p(:,1));
clear p clear t
while h>pos_max
c=c+j; save c; [t,p]=ode45('caida',[t_0,t_f],p0); h=max(p(:,1));
clear p; clear t; end
save c h c

Archivo: caida_grafica clc clear all close all load c
p0=[0;vi];
[t,p]=ode45('caida',[t_0,t_f],p0);
h=max(p(:,1)) c cd=c*m-0.5*pho*area*ca vmax=max(p(:,2)) e_teo=m*g*pos_max e_exp=0.5*m*vmax^2 perdida=(e_teo-e_exp)*100/e_teo plot(t,p(:,1),t,p(:,2))
De igual manera se generó un código para evaluar el rebote del martillo. Archivo: rebote.m function d=rebote(t,p) load g load c
d=[p(2); -g-c*(p(2)^2)];
Archivo: rebote_modelo.m clc clear all close all global g vi g=9.8; c=input('valor inicial de iteracion ') j=input('salto para iteracion ') vi=input('velocidad de rebote en metros sobre segundo ') save c; save g; ca=1.17; m=13.9; pho=0.89; r=0.1; area=pi*r^2;
t_0=0; t_f=input('tiempo de rebote en segundos ') p0=[0;vi]; save p0 pos_max=input('distancia recorrida en metros ') save pos_max
[t,p]=ode45('rebote',[t_0,t_f],p0); h=max(p(:,1));

clear p clear t
while h>pos_max
c=c+j; save c; [t,p]=ode45('rebote',[t_0,t_f],p0); h=max(p(:,1));
clear p; clear t; end
save c h c
Archivo: rebote_grafica-m clc clear all close all load c
p0=[0;vi];
[t,p]=ode45('rebote',[t_0,t_f],p0);
h=max(p(:,1)) c cd=c*m-0.5*pho*area*ca vmax=max(p(:,2)) vmin=min(p(:,2)) e_cin=m*g*pos_max e_pot=0.5*m*vmax^2 perdida=(e_cin-e_pot)*100/e_cin plot(t,p(:,1),t,p(:,2))

8-Conclusiones
Se diseñaron y construyeron las piezas necesarias para el correcto funcionamiento del
DIPVM con el dispositivo de pruebas a tensión, se desarrollaron dos propuestas de la posible
configuración para el soporte del sensor de deformación laser.
Se estableció un protocolo de pruebas de fácil repetición que se validó según lo expuesto en
el numeral 5 de este documento, donde se muestra que los valores de energía entregados y
la deformación lograda por las pruebas son consistentes con las fuerzas medidas en las
pruebas.
Se elaboró un código que permitirá a futuro mantener un control permanente del
comportamiento dinámico de la máquina, incluyendo parámetros de energía, velocidad y
perdidas, el cual se debe implementar en el control del dispositivo con el sensor láser
SickDT60, y en caso de no ser posible o viable realizar el análisis con los datos adquiridos por
este sensor se recomienda implementar un acelerómetro adecuado en el control de la
máquina.
9-Recomendaciones
Se identificaron posibles usos que se pueden implementar en el DIPVM, en las normas ASTM
relacionadas a pruebas con impacto vertical, y en la literatura especializada se encuentra
una gran cantidad de pruebas que se pueden generar con cambios simples sobre el estado
actual del dispositivo, generando impactores con diferentes geometrías y cambiando la
configuración de la zona de impacto.
Adquirir un torquimetro que cumpla con el requerimiento de las celdas de carga.
Se recomienda implementar una cubierta de policarbonato en la guarda de la maquina ya
que de realizarse pruebas en materiales que tengan un comportamiento frágil que arroje
fragmentos, se pueden presentar inconvenientes de seguridad para los futuros usuarios.

Se evidenciaron diversos problemas en el funcionamiento de la máquina, se recomienda una
revisión el control de la máquina ya que este en ocasiones no sigue las instrucciones del
usuario, además se recomienda mejorar la manera en que se adquieren los datos dado que
al querer realizar un análisis de un conjunto de pruebas se presentan dificultades ya que la
ventana de medición no siempre es la misma, también se considera prudente que el control
permita ingresar los diversos factores de la probeta, para que este, de ser deseado, arroje
información de esfuerzo vs deformación.
Cambiar el computador actual por uno que no presente problemas en sus puertos de
conexión lo cual en ocasiones dificulta la adquisición de datos.
10-Bibliografia
[1] Casas, Juan Pablo. Damage in adhesively bonded joints: sinusoidal and impact fatigue.
Doctoral Thesis. Loughborough University.
[2] Budynas, Richard G. Shigley’s Mechanical Engineering Design. Mc Graw Hill. Octava Ed.
[3] Avendaño Diego. F. (2013). Tesis de Maestria. Caracterización experimental y modelación
numérica de Honeycomb sometido a impactos de baja velocidad. Bogota: Universidad de los
Andes
[4] E Lijuan Liao, Toshiyuki Sawa and Chenguang Huang, Experimental and FEM Studies on
Mechanical Properties of Single-lap Adhesive Joint with Dissimilar Adher
ends Subjected to Impact Tensile Loadings, International Journal of Adhesion & Adhesives.
[5] Gomez Luis.F. (2013). Proyecto de grado. Pruebas de fatiga por impacto en juntas con
adhesivo. Bogotá: Universidad de los Andes.
[6] I A, Ashcroft. Fatigue. [book auth.] R.D. Adams. Adhesive Bonding: Science Technology
and applications. s.l. : Woodhead Publishing Limited , 2005, pp. 209-239
[7] Instron Dynatup 8210 Drop-Weight Impact Tester user`s guide

[8] Sivakumar Palanivelu, Wim Van Paepegem, Joris Degrieck, Stijn De Pauwa, John
Vantomme, Jan Wastiels, Dimitrios Kakogiannis, Danny Van Hemelrijck. (2011). Low velocity
axial impact crushing performance of empty recyclable metal beverage cans. International
Journal of Impact Engineering.
[9] Tadaharu Adachi_, Atsuo Tomiyama1, Wakako Araki, Akihiko Yamaji.(2007). Energy
absorption of a thin-walled cylinder with ribs subjected to axial impact. International Journal
of Impact Engineering.
[10] Oliver A. Shergold, Norman A. Fleck, Darren Radford. (2006). The uniaxial stress versus
strain response of pig skin and silicone rubber at low and high strain rates. International
Journal of Impact Engineering.