-
7/24/2019 Cap. 1 - (b.2) Projeto via Cancelamento de Polos e
Zeros (Primeira Ordem) v2
1/12
1.d Controlador ro orcional inte ral PI
CampusPato Branco - Sistemas de Controle 2 Prof. Johnny
Werner
-
7/24/2019 Cap. 1 - (b.2) Projeto via Cancelamento de Polos e
Zeros (Primeira Ordem) v2
2/12
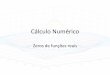
1.d) Controlador proporcional integral (PI)
O controlador proporcional integral (PI) pode ser observado
no
diagrama de blocos abaixo:
CampusPato Branco - Sistemas de Controle 2 Prof. Johnny
Werner
suporH(s)=h= constante
Kp= ganho proporcional
Ti= tempo integral
-
7/24/2019 Cap. 1 - (b.2) Projeto via Cancelamento de Polos e
Zeros (Primeira Ordem) v2
3/12
1.d) Controlador proporcional integral (PI)
A funo de transferncia do controlador proporcional integral
pode
ser representada conforme abaixo:
CampusPato Branco - Sistemas de Controle 2 Prof. Johnny
Werner
Obs.: por ter um integrador na FT, o controlador PI inserido no
ramo
direto aumenta o tipo do sistema, diminuindo (ou zerando) o
erro.
-
7/24/2019 Cap. 1 - (b.2) Projeto via Cancelamento de Polos e
Zeros (Primeira Ordem) v2
4/12
1.d) Controlador proporcional integral (PI)
Erro em regime permanente nulo para entrada
degrau
TMF ara entrada de rau em fun o de
CampusPato Branco - Sistemas de Controle 2 Prof. Johnny
Werner
TsProcesso, Kp, ge h)
onde:
= erro em regime permanente para entrada degrau
Kp= ganho proporcional
g= ganho do processo
h= ganho da realimentao
(dedues no quadro)
-
7/24/2019 Cap. 1 - (b.2) Projeto via Cancelamento de Polos e
Zeros (Primeira Ordem) v2
5/12
1.d) Controlador proporcional integral (PI)
Obs.:
O controlador PI proporciona o erro nulo para entrada degrau, o
que
no acontece com os outros controladores estudados at agora.
AumentandoKp, oTsMFdiminui.
Uma vantagem do controlador PI que se consegue erro de
estado
estacionrio nulo para entrada degrau mesmo com um valor
pequeno
para o ganhoKp, evitando assim a saturao.
CampusPato Branco - Sistemas de Controle 2 Prof. Johnny
Werner
-
7/24/2019 Cap. 1 - (b.2) Projeto via Cancelamento de Polos e
Zeros (Primeira Ordem) v2
6/12
1.d) Controlador proporcional integral (PI)
O ganho de MF funo somente de H(s) = h, e no depende do
valor deKp.
Dedues vlidas apenas para entrada degrau e realimentao
.
CampusPato Branco - Sistemas de Controle 2 Prof. Johnny
Werner
-
7/24/2019 Cap. 1 - (b.2) Projeto via Cancelamento de Polos e
Zeros (Primeira Ordem) v2
7/12
1.d) Controlador proporcional integral (PI)
Exemplo 1.4) Dado o sistema abaixo, projetar um controlador PI
para:
= 0
s s
ConsiderarH(s) = 0,1. Comprovar os resultados obtidos e
simular
tudo no Matlab.
CampusPato Branco - Sistemas de Controle 2 Prof. Johnny
Werner
-
7/24/2019 Cap. 1 - (b.2) Projeto via Cancelamento de Polos e
Zeros (Primeira Ordem) v2
8/12
1.d) Controlador proporcional integral (PI)
Exerccio 1.4) Dado o sistema abaixo, projetar um controlador
PI
para:
= 0
s 2% ,
Considerar entrada degrau unitrio. Comprovar os resultados
obtidos
e simular tudo no Matlab.
CampusPato Branco - Sistemas de Controle 2 Prof. Johnny
Werner
R:
-
7/24/2019 Cap. 1 - (b.2) Projeto via Cancelamento de Polos e
Zeros (Primeira Ordem) v2
9/12
1.e Controlador ro orcional derivativo PD
CampusPato Branco - Sistemas de Controle 2 Prof. Johnny
Werner
-
7/24/2019 Cap. 1 - (b.2) Projeto via Cancelamento de Polos e
Zeros (Primeira Ordem) v2
10/12
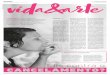
1.e) Controlador proporcional derivativo (PD)
O controlador proporcional derivativo (PD) pode ser observado
no
diagrama de blocos abaixo:
CampusPato Branco - Sistemas de Controle 2 Prof. Johnny
Werner
Supor: H(s)=h= constante
Kp = ganho proporcional
Td= tempo derivativo
-
7/24/2019 Cap. 1 - (b.2) Projeto via Cancelamento de Polos e
Zeros (Primeira Ordem) v2
11/12
1.e) Controlador proporcional derivativo (PD)
A funo de transferncia do controlador proporcional derivativo
pode
ser representada conforme abaixo:
CampusPato Branco - Sistemas de Controle 2 Prof. Johnny
Werner
-
7/24/2019 Cap. 1 - (b.2) Projeto via Cancelamento de Polos e
Zeros (Primeira Ordem) v2
12/12
1.e) Controlador proporcional derivativo (PD)
O controlador PD pode ser utilizado para controlar processos
de
primeira e de segunda ordem. A anlise por esse mtodo pode ser
feita
da mesma forma j adotada para os outros controladores, porm
os
clculos no so to simplificados e no sero apresentados aqui.
CampusPato Branco - Sistemas de Controle 2 Prof. Johnny
Werner
O projeto desse controlador ser melhor estudado adiante, via
mtodos de projeto no LR e resposta em frequncia.