Embed Size (px)
Citation preview

Capítulo 2
Método de Modelado Aplicando la FunciónPulso Unitario de Heaviside
Objetivos del CapítuloEn este capítulo se introducen los fundamentos matemáticos y funcionales de la técnica
de modelado no lineal desarrollada en esta tesis. Se comienza por la descripción de lascaracterísticas deseadas del modelo, que dan paso a los fundamentos desde los que se parte.
Seguidamente se describe el análisis matemático del proceso de modulación PWM, pormedio de la transformada de Laplace y la función Pulso Unitario de Heaviside, para obtenerel modelo de simulación del modulador PWM. A continuación se plantea el modelado delos filtros de salida de las etapas de los convertidores conmutados y de las etapas de controlPWM clásicas. Por último se aplica la técnica de modelado al paralelizado de convertidoresconmutados.
Como resultado se obtiene un modelo analítico de la modulación PWM y un modelode simulación no lineal aplicable a la simulación de convertidores conmutados de potencia,desarrollado en una biblioteca de módulos de SIMULINK.
2.1. Introducción a la Metodología de ModeladoA la luz de la evolución histórica de las técnicas de modelado (ver el apartado 1.6 en la
página 48), asociadas a las necesidades de análisis, desarrollo y comprensión del funcionamientode las distintas topologías de los convertidores conmutados de potencia, de sus circuitos decontrol y de las asociaciones de convertidores para formar sistemas más complejos, se planteala elaboración de una técnica de modelado que, a grandes rasgos, intenta aunar las virtudesmás relevantes de los métodos de modelado existentes y aprovechar las actuales capacidadesde cómputo de las plataformas de ordenadores y de los distintas herramientas informáticasdisponibles.
59

Capítulo 2. Método de Modelado Aplicando ...
Las principales características de la metodología de modelado propuesta son:
Descripción matemática y funcional del modulador PWM
• La descripción matemática está basada en la función Pulso Unitario de Heaviside• Se obtiene un modelo de simulación fácil de aplicar a los convertidores conmutados• El modelo del modulador PWM permite obtener distintos tipos de modulación (natural,
uniforme, multinivel)
Descripción matemática y funcional del circuito de la etapa de salida del convertidor
• Válida tanto para modo continuo como discontinuo• Se obtienen las variables eléctricas de la etapa de potencia• El modelo de simulación permite la variación, lineal y no lineal, de los parámetros de
los elementos que modelan la carga
Descripción matemática y funcional del circuito de la etapa de compensación del convertidor
• Modela las no linealidades de los circuitos de control disponibles comercialmente• Permite obtener las variables eléctricas• Es posible implantar otros tipos de control (fuzzy, discreto, etc...)
El modelo es fácil de usar una vez implantado en el programa de simulación (MATLAB Y
SIMULINK)
• La plataforma de simulación permite el crecimiento del modelo de forma modular• Es posible escoger el método matemático de resolución de las ecuaciones diferenciales• La simulación se puede llevar a cabo mediante interpretación de los comandos por
parte del simulador, o bien por compilación del modelo y obtención de un programaejecutable
2.2. Fundamentos de la Metodología de ModeladoDel funcionamiento de las cuatro topologías básicas – reductora (ver A.2.1 en la página 146),
elevadora (ver A.2.2 en la página 148), reductora-elevadora (ver A.2.3 en la página 150) y Cuk(ver A.2.4 en la página 152) – se desprenden una serie de ideas que permiten la elaboración de unmodelo no lineal.
La primera idea se obtiene de la observación del conjunto de interruptores en el circuito(generalmente un transistor actuando como interruptor controlado (S) y un diodo (D), que entraen conducción cuando el interruptor está abierto ), ya que estos componentes semiconductoressólo permiten el flujo de energía en un único sentido en el convertidor. Esta idea se representagráficamente en la Fig. 2.1
La segunda idea tiene su origen en la disposición de los elementos pasivos que conformanla etapa de salida de los convertidor: inductancia (L), condensador (C) y carga (generalmenteasimilada a R). Estos elementos pasivos, asociados a la presencia de un diodo (D), hacen que el
60

2.2 Fundamentos de la Metodología de Modelado
(a) reductor (buck) (b) elevador (boost)
(c) reductor-elevador (buck-boost)
(d) Cuk
Figura 2.1: Convertidores básicos. Disposición de los interruptores controlado (S)y no controlado (D)
filtro de salida sólo pueda trabajar dejando que la energía eléctrica fluya en un determinado sentido.Dada su similitud, es posible obtener, de manera análoga para todos, un modelo que describa elcomportamiento de esta parte del circuito. Las capacidades de este circuito han sido estudiadasintensivamente, pero es difícil encontrar análisis detallados o completos [144–146]. Esta idea serepresenta gráficamente en la Fig. 2.2
Uniendo las dos ideas anteriores es posible realizar una descripción de la etapa de potenciade un convertidor conmutado en dos bloques claramente interrelacionados: el primero es unmodulador PWM que genera una señal cuadrada genérica, similar al encendido y apagado delinterruptor controlado, el segundo bloque modela el comportamiento no lineal del filtro LCR desalida del convertidor, que engloba el diodo.
Para obtener un sistema completo es necesario implantar la etapa de control. En el estado actualde desarrollo de convertidores conmutados de potencia es un requisito fundamental que el modelode este bloque pueda acomodar los controles clásicos (PI, PID) y las elaboraciones más complejasde origen digital (control digital, fuzzy, deslizante, etc...).
Finalmente, el modelo debe permitir el modelado de elementos parásitos, tanto en loselementos semiconductores como en los componentes pasivos, y la capacidad de hacer que elmodulador PWM presente características próximas a los circuitos reales de control. Sin perder devista el paralelizado de módulos se hace necesario tener en cuenta que tanto el modulador como laparte de control deben ser capaces de simular las singularidades que estos métodos presentan.
61

Capítulo 2. Método de Modelado Aplicando ...
(a) reductor (buck) (b) elevador (boost)
(c) reductor-elevador (buck-boost)
(d) Cuk
Figura 2.2: Convertidores básicos - Componentes de la etapa de salida
2.3. El modulador PWMEl correcto funcionamiento del modelo del modulador en ancho de pulsos (pulse-width
modulator) es importante para alcanzar modelos matemáticos y de comportamiento de los sistemasque lo incorporen. Igualmente estos modelos deben permitir obtener información precisa sobreel contenido de armónicos de la señal modulada y ser fácilmente aplicables en modelos decircuitos eléctricos y electrónicos para saber cómo se comportarán éstos en presencia de las señalesmoduladas.
Históricamente muchas técnicas de modulación1, especialmente aquellas complejas y lasque se sirven de técnicas digitales, no pudieron ser implantadas debido a las limitacionesde los semiconductores y de los circuitos de control. La modulación natural y la uniforme( también llamada por algunos autores muestreada - sampled) [147–149] fueron las primerasen ser aplicadas. Posteriormente, para controlar motores de tensión alterna con la ayuda decircuitos digitales se aplicaron señales moduladas más complejas [150–153]. Más ejemplosdonde se observa la importancia de la modulación PWM los encontramos en [155], donde unsistema con un microprocesador dedicado controla un inversor en fuente de tensión (VSI) contransistores MOSFETs, empleando un esquema de modulación especial que reduce el número deconmutaciones, en [156] proponen un modulador PWM elaborado en un programa de ordenadorque permite las modulaciones clásicas y un modo especial de inyección de armónicos y en[157, 158] con la ayuda de DSPs se aplica la modulación PWM a la modulación en el espacio
1Por sencillez, siempre que se hable en este capítulo de la modulación en ancho de pulsos (PWM) ladenominaremos modulación.
62

2.3 El modulador PWM
de vectores (space vector modulation, SVM).Con el aumento de la complejidad de la modulación también se incrementó la complejidad de
los modelos matemáticos y de simulación, en especial en aquellos casos en que se incluye el lazode control. Enfocados concretamente en modelar el proceso de modulación, surgieron modeloselaborados empleando la serie de Fourier [148, 149], funciones de Bessel [154, 155] y modelos enel dominio del tiempo de las señales involucradas en la modulación [156]. Al aplicar el controlPWM también a convertidores conmutados, esfuerzos para describir su naturaleza inherentementeno lineal se encuentran en [160] aplicando la transformada de Laplace, en [65] aplicando la seriede Taylor y en [85] aplicando la serie de Volterra.
2.3.1. Análisis MatemáticoLa mayoría de los modelos matemáticos de la modulación PWM aplicada a convertidores
conmutados de potencia intenta evitar el empleo de las inherentes no linealidades que presenta,pues es un bloque que funciona únicamente en conmutación.
Para ello se emplean modelos promediados, que reducen la función de transferencia delmodulador a un factor de atenuación directamente relacionado con la relación de tiempo deencendido frente al período de conmutación. También se aproxima su comportamiento pordesarrollos de series, que presentan mayor precisión cuantos más términos posea la serie, lo quehace costoso en términos de cómputo un modelo preciso.
A mayores de estos factores, si el modelo es promediado, desaparecen todos los efectosrelacionados con los desfases. Esto añade una dificultad en el caso de modelar convertidores enparalelo que funcionan sincronizados (interleaving).
Para solventar estos problemas, se ha desarrollado un modelo del modulador empleandorelaciones matemáticas. Este modelo matemático no aporta per se información más precisa quelos desarrollos en serie, pero permite crear un modelo de simulación preciso y con unos requsitosde cómputo exiguos.
En este apartado se elabora un análisis matemático para demostrar como obtener las señalesPWM, empleando algunas propiedades interesantes aportadas por la transformada de Laplace y lafunción Pulso Unitaria de Heaviside [161].
El punto de partida para la creación de un modelo del modulador es establecer cuales son lasseñales de entrada necesarias, que aporta cada una de las mismas a la modulación y que señales desalida obtenemos del modulador.
Para la obtención de una señal modulada en ancho de pulso genérica (uPWM(t)) son necesariasdos señales: la portadora
(uportadora(t)
)y la referencia
(ure f erencia(t)
). Como condición para que
el proceso de modulación sea válido, lo que equivale a decir que la señal modulada contenga lamisma información que la señal de referencia, es condición indispensable que la frecuencia de laseñal portadora sea mayor que la señal de referencia. En la mayoría de los procesos de conversiónde energía mediante interruptores controlados la portadora tiene forma triangular, bien simétrica,bien asimétrica (diente de sierra). La señal modulada puede ser de dos formas, a las cuales se lesdenomina modulada normal
(un
modulada(t))
y su complementaria(uc
modulada(t)).
De la representación de las señales en la Fig. 2.3 se definen otras variables:
La señal modulada, de forma general, está definida como un tren de pulsos que tiene valormínimo cero y máximo igual a uno. Los valores máximo y mínimo final de la señal se puede
63

Capítulo 2. Método de Modelado Aplicando ...
Figura 2.3: Señales de la modulación PWM
cambiar con el añadido de dos variables: el valor mínimo que toma la señal, que se denotapor Ue-mínimo y que toma generalmente el valor cero; y el valor máximo, que se denota porue-máximo(t).
El ancho de pulso de la señal modulada, al que se denomina tdelta.
El atraso del pulso respecto al comienzo de la señal triangular (portadora), que se denominatphi.
La frecuencia constante de la señal portadora, que se denomina f p y su período, Tp.
Por sencillez y sin renunciar a ninguna generalidad, se define:
tdelta = t2− t1 (2.1)
tphi = t1 (2.2)
La función unmodulada(t) en la Fig. 2.3 puede definirse en subintervalos de duración Tp como:
unmodulada(t) =
ue-máximo(t)−Ue-mínimo 0 < t < t1Ue-mínimo t1 < t < t2
ue-máximo(t)−Ue-mínimo t2 < t < Tp
(2.3)
y la función ucmodulada(t) en la Fig. 2.3 puede definirse en subintervalos de duración Tp como:
ucmodulada(t) =
Ue-mínimo 0 < t < t1ue-máximo(t)−Ue-mínimo t1 < t < t2
Ue-mínimo t2 < t < Tp
(2.4)
64

2.3 El modulador PWM
Si ue-máximo(t) = 1 yUe-mínimo = 0, entonces se definen las funciones moduladas unitarias
fn(t) = un−unitariamodulada (t) =
1 0 < t < t10 t1 < t < t21 t2 < t < Tp
(2.5)
y
fc(t) = uc−unitariamodulada (t) =
0 0 < t < t11 t1 < t < t20 t2 < t < Tp
(2.6)
Por lo tanto, se pueden volver a definir las Ec. 2.3 y 2.4 como:
unmodulada(t) = Ue-mínimo +(ue-máximo(t)−Ue-mínimo) fn(t) (2.7)
ucmodulada(t) = Ue-mínimo +(ue-máximo(t)−Ue-mínimo) fc(t) (2.8)
donde se aprecia que el valor de la función modulada depende realmente de la función moduladaunitaria.
Para obtener una mejor comprensión de las funciones de modulación se le aplica latransformada de Laplace definida por:
L{ f (t)}= F(s) =
Z ∞
0f (t) · e−s·tdt (2.9)
a las Ec. 2.5 y 2.6, teniendo en cuenta que la transformación de una función periodica se lleva acabo con:
F(t) =
R T0 f (t) · e−s·tdt
1− e−st (2.10)
Aplicando la propiedad de la Ec. 2.10 a la señal en la Ec. 2.6
Fc(s) =
R Tp0 fc(t) · e−s·tdt
1− e−st =
R t10 0 · e−s·t dt +
R t2t1 1 · e−s·t dt +
R Tpt2 0 · e−s·t dt
1− e−st (2.11)
se obtiene la señal resultante
Fc(s) =e−s·t1 − e−s·t2
s(1− e−st)(2.12)
que se descompone en dos partes
Fc(s) =e−s·t1
s(1− e−st)− e−s·t2
s(1− e−st)(2.13)
aplicando la transformada inversa de Laplace para volver al dominio del tiempo, se obtiene lafunción Pulso Unitario de Heavisde, que se describe por:
U(t − tr) =
{0 t < tr1 t > tr
(2.14)
65

Capítulo 2. Método de Modelado Aplicando ...
donde tr es el instante en que el pulso cambia a valor uno. Luego, la señal modulada en ancho depulso fc(t) se expresa como:
fc(t) = U (t − t1)−U (t − t2) (2.15)
Llevando a cabo operaciones matemáticas análogas, la señal modulada en ancho de pulso fn(t)se expresa como:
fn(t) = 1−U (t − t1)+U (t − t2) (2.16)
y las señales que definen la señal modulada se representan en la Fig. 2.4.
Figura 2.4: Señales PWM unitarias y funciones Pulso Unitario de Heaviside
Para obtener un modelo matemático más genérico, las Ec. 2.15 y 2.16 pueden ser formuladasusando álgebra de módulos:
fn(t) = 1−|U (t − t1)−U (t − t2)| = 1−|U (t − t2)−U (t − t1)| (2.17)
fc(t) = |U (t − t1)−U (t − t2)| = |U (t − t2)−U (t − t1)| (2.18)
y debido a la naturaleza Booleana de las señales, también pueden ser formuladas con ayuda de lafunción o-exclusiva:
fn(t) = U (t − t1)⊕U (t − t2) (2.19)
fc(t) = U (t − t1)⊕U (t − t2) (2.20)
La simulación de un sistema dinámico con lazo de control requiere que se obtenga de un“tren” de pulsos modulados. Esta secuencia de pulsos se puede expresar como la suma ordenadade pulsos obtenidos en distintos instantes de tiempo, lo que se puede observar claramente en laFig. 2.5, donde utk = U (t − tk). Una de las condiciones para que la modulación sea válida es quela frecuencia de la portadora debe ser mayor que la frecuencia de la señal de referencia. Basándoseen esta condición se asumen las siguientes suposiciones a efectos prácticos:
66

2.3 El modulador PWM
para el ancho de pulso (tdelta)
t2 − t1 ∼= t4− t3t4 − t3 ∼= t6− t5t6 − t5 ∼= t8− t7
· · ·
para el atraso del pulso(tphi
)t1 ∼= Tc − t3
Tc − t3 ∼= 2Tc − t52Tc − t5 ∼= 3Tc− t7
· · ·
Figura 2.5: Secuencias de Pulsos Unitarios de Heaviside
Dos señales pulsantes, compuestas de una suma en serie de funciones Pulso Unitario deHeaviside, se definen como:
uimpar(t) = ut1 −ut3 +ut5 −ut7 +ut(2n+1) −ut(2n+3)...upar(t) = ut2 −ut4 +ut6 −ut8 +ut(2n+2) −ut(2n+4)...
}n = 4,6,8,10... (2.21)
o bien por
uimpar(t) =∞
∑n=1
(−1)n+1 ·U (t − t2n−1) (2.22)
upar(t) =∞
∑n=1
(−1)n+1 ·U (t − t2n) (2.23)
y la función modulada fc(t) queda definida por
fc(t) = upar(t) ⊕ uimpar(t) (2.24)
con un período igual a la mitad del período de las señales pulsantes upar y uimpar.
67

Capítulo 2. Método de Modelado Aplicando ...
2.3.2. Implementación Software del ModeloA partir de las deducciones matemáticas se crea un modelo no lineal de comportamiento por
medio de MATLAB y SIMULINK [162]. Se ha escogido trabajar con estas dos herramientas por lassiguientes razones:
permiten de manera sencilla manipulaciones matemáticas de variables, matrices y funcionestienen bibliotecas de funciones de los propios programas y de toda la comunidad de usuariosel módulo SIMULINK posee bibliotecas de bloques a partir de las cuales es posible modelarsistemas mediante un editor gráficose pueden crear bibliotecas de bloques a partir de la descripción con bloques ya existentesdisponen de varios algoritmos de solución de ecuaciones diferenciales, tanto para sistemascontinuos como para sistemas discretizadosgestionan de forma sencilla la creación de gráficos de las funciones en dos y tres dimensionesexiste la posibilidad de compilar los modelos en código ejecutable, a través de un compiladorC, para acelerar su simulación
El primer objetivo es modelar un bloque de SIMULINK, que se denomina Generador TotalmenteControlado con salida complementaria (GTCc), que acepte las entradas de la Tabla 2.1 y permitaobtener en sus salidas las funciones descritas por las Ec. 2.7 y 2.8.
Nombre Función o variable matemática Valor
Ue ue-máximo(t)valor máximo que toma la señalmodulada
Uminimo Ue-mínimovalor mínimo (constante) que tomala señal modulada
T Tpperíodo (constante) de la señalportadora
Delta tdeltaancho de pulso de la señalmodulada
Phi tphi
atraso del pulso respecto alcomienzo de la señal triangular(portadora)
PS —
señal digital para modelar laprotección contra sobrecorriente,presente en circuitos de controlPWM comerciales
Tabla 2.1: Entradas del GTCc
Para modelar un sistema como el descrito por la Ec. 2.24 se comienza por un bloque generadorde una señal cuadrada de frecuencia constante y amplitud igual a uno, a la que denominaremosf0, que modela las señales pulsantes upar y uimpar sin ningún atraso temporal. A esta señal se lahace pasar a través de dos bloques Variable Transport Delay (VTD). Los bloques VTD tienen dos
68

2.3 El modulador PWM
entradas: la primera entrada recibe la señal que va a ser atrasada y la segunda entrada necesita elvalor, en segundos, del atraso que se le aplicará a la señal de la primera entrada.
Para crear la señal modulada, el primer VTD tiene por entrada la señal f0 y por atraso el valort1. De la Ec. 2.2 se sabe que t1 = tphi. La señal que se obtiene de este primer bloque correspondecon la uimpar de la Fig. 2.5. El segundo VTD tiene por entrada la señal f0 y por atraso el valor det2. De la Ec. 2.1 se sabe que t2 = tdelta + t1 = tdelta + tphi. La señal que se obtiene de este segundobloque corresponde con la upar de la Fig. 2.5. Estas dos señales son las entradas de una funciónO-exclusiva, para obtener en la salida la función fc(t).
El modelo resultante de SIMULINK para simular el primer paso del proceso de modulación semuestra en la Fig. 2.6.
La Constante 2 determina el atraso de la señal de salida. La Constante 3 determina el ancho de pulso.
El Atraso Variable 1 es el que genera el atraso de la señal de salida.El Atraso Variable 2 es el que genera el ancho de pulso de la señal de salida.
Variable TimeDelay 2
Variable TimeDelay 1
z1
Unit Delay
Suma 2
Suma
Scope
XOR
OperadorLógico
tdelta
Constante 3Ancho de Pulso
tphi
Constante 2Atraso
1
Constante 1
Figura 2.6: Modelo de SIMULINK del Generador Totalmente Controlable (sinencapsular)
Este modelo se encapsula en un bloque al que se denomina Generador Totalmente Controlado(GTC), y es el primer componente de una biblioteca de bloques para simular convertidoresconmutados de potencia. Aunque está incompleto frente a todas las posibilidades que se implantanen apartados posteriores, este modulador posee todos los fundamentos matemáticos y funcionalesdel modelo.
Cabe señalar que el comportamiento de GTC no será correcto cuando la señal de referenciatenga cambios bruscos en las inmediaciones del instante en que la referencia supere el valor dela moduladora, lo que se traduce en un serie de oscilaciones caóticas de la señal modulada. Estefenómeno, detectado a principios de los años 70, hizo que los circuitos de control tuviesen la salidadel comparador (modulador) aplicada a la entrada S (set) de un biestable R-S, de tal forma queúnicamente el primer cambio activara la salida y sólo se desactivara cuando se hubiese cumplido elciclo Tp de conmutación. Un claro ejemplo de esta solución se encuentra en los circuitos integradosSG1524 y derivados.
69

Capítulo 2. Método de Modelado Aplicando ...
Para que la salida del modulador corresponda con las Ec. 2.7 y 2.8 es necesario añadir losbloques que completen la funcionalidad, los cuales se muestran en la Fig. 2.7, y que se analizadesde el esquema de SIMULINK.
Comenzando por la izquierda del modelo, se encuentran las entradas Delta y Phi, que ahorapasan por dos bloques de saturación. Estos bloques tiene por misión evitar que ambas señalesexcedan de los valores correctos de funcionamiento, ya que ambas deben cumplir:
0 < tdelta < Tp (2.25)
0 < tphi < Tp (2.26)
Estas señales entran como variable de control de dos VTDs (aqui denominados Atraso Variable1 y 2), los cuales se encargan de atrasar la señal f0 para obtener las señales uimpar y upar. Estasdos señales vuelven a pasar a través de otros dos VTDs (denominados Atraso Variable 3 y 4),cuya señal de control es un 0,5 % del período Tp. Las señales provenientes de los atrasos imparesgeneran una señal pulso de Dirac que activa la salida Q (desactiva la salida !Q) del biestable RS ylas señales provenientes de los atrasos impares generan el pulso que desactiva la salida Q (activala salida !Q).
El biestable RS necesita una señal que le aporte flancos ascendentes, para permitir la evolucióndel mismo segun el estado de sus entradas. Esta señal proviene de otro generador de ondascuadradas, pero de frecuencia mil veces mayor que la de la portadora.
En las salidas del biestable se obtienen las funciones fc(t) y fn(t). Para finalmente obtener lasmoduladas las salidas del biestable pasan por un conjunto de bloques que implantan las ecuacionesEc. 2.7 y 2.8.
Por último, la entrada PS (protección de sobrecorriente) permite, de forma asíncrona, desactivarambas salidas del modulador. Su objetivo es presentar la funcionalidad de protección porsobrecorriente, o también la de permitir el apagado del modulador desde un sistema de controlexterno. Cuando toma el valor uno, provoca la puesta a cero de la salida Q del biestable y la puestaa cero de las salidas del modulador.
2.3.3. Ensayos del Modelo del Modulador PWMPara comprobar que tanto el desarrollo matemático como la implantación funcional en el
modelo de SIMULINK son correctas se llevan a cabo una serie de pruebas cuyos resultados semuestran en el apartado 3.1 en la página 94 y posteriores.
70

2.3E
lmodulador
PW
M
Este es el modelo del Generador Totalmente Encapsulado con salida Complementaria listo para enmascarar en la libreria lib400.mdl
Las variables necesarias para la mascara son:T = periodo de oscilacion del sistema
T05 = el cinco por mil del periodo de oscilacion del sistemaTM = 0.001 * T, muestreo del flip flop
SAT = SAT1 = el 99,95% del periodo de oscilacion del sistema
2
Uc
1
Ug
Uminimo
Uminimo
Suma 7
Suma 6
Suma 5
Suma 4
Suma 3Suma 2
Suma 1Suma
Saturation1
SaturationS
R
Q
!Q
S−RFlip−Flop Producto
1
Producto
XOR
OperadorLógico1
XOR
OperadorLógico
z1
Atraso unidad 1
z1
Atraso unidad
Atraso Variable 4
Atraso Variable 3
Atraso Variable 2
Atraso Variable 1
T05
0,5% del Periodo1
Constante 3
1
Constante 2
1
Constante 1
4
PS
3
Phi
2
Delta
1
Ue
Figura2.7:M
odelocom
pletode
SIM
UL
INK
delGenerador
Totalmente
Controlado
consalida
complem
entaria(G
TC
c)
71

Capítulo 2. Método de Modelado Aplicando ...
2.4. El Filtro de Salida del Convertidor ReductorDe la observación de la etapa de salida de los convertidores de la Fig. 2.2 se aprecia que
todos son circuitos LCR + D, lo que constituye un filtro paso bajo destinado a “suavizar” lospulsos de tensión provenientes de la fuente de entrada y el interruptor controlado. Es, por lo tanto,parte fundamental de la dinámica que presenta el convertidor. Para llevar a cabo el modelado secomenzará con el filtro de salida de una topología reductora, que se representa en la Fig. 2.8 conlos elementos parásitos más importantes de sus componentes.
Figura 2.8: Filtro de salida de un convertidor reductor con componentes parásitos
Si bien el filtro de salida, ateniéndonos al concepto clásico de filtro pasivo, está integrado porla inductancia, el condensador y la carga, se incluye en el mismo la presencia del diodo D. Lapresencia de este diodo permite modelar la respuesta del filtro del convertidor reductor cuandotrabaja en modo discontinuo, pues el GTCc no modela el comportamiento eléctrico del conjuntofuente de tensión de entrada, transistor y diodo. El GTCc sólamente aporta la forma de la onda detensión aplicada a la entrada del filtro.
Es habitual recurrir a modelos de la etapa de potencia y del filtro de salida cuya composiciónacomoda componentes no lineales (diodo, transistor) y lineales (inductancia, condensador) o noen función de la descripción funcional del convertidor. Esto conlleva que, al crear el modelomatemático de análisis y el de simulación, el comportamiento de los componentes no linealesse vea “encapsulado” en el comportamiento de tensiones y corrientes de forma no lineal por loselementos lineales. Ejemplos de esta clase de análisis se encuentran en [51–53, 99].
2.4.1. Análisis MatemáticoDel circuito de la Fig. 2.8 se obtiene su función de transferencia lineal (ver desarrollo
en B.1.1 en la página 171) :
F(S) =Us(s)Ue(s)
=RS + sCRSRC
RS +RL + s(L+C (RLRC +RLRS +RCRS))+ s2LC (RS +RC)(2.27)
Esta ecuación, debido a que la resistencia de pérdidas de la inductancia presenta menor efectoque la resistencia equivalente serie del condensador, se suele aplicar con la forma simplificada:
72

2.4 El Filtro de Salida del Convertidor Reductor
F(S) =Us(s)Ue(s)
=RS + sCRSRC
RS + s(L+CRCRS)+ s2LC (RS +RC)(2.28)
El modelo lineal del espacio de estados de este circuito es (ver desarrollo en B.1.2 en lapágina 173):
[diL(t)
dtduC(t)
dt
]=
[−RCRS+RCRL+RLRS
L(RC+RS)− RS
L(RC+RS)RS
C(RC+RS)− 1
C(RC+RS)
][iL(t)uC(t)
]+
[ 1L0
]uE(t) (2.29)
uS(t) =[
RCRSRC+RS
RSRC+RS
][iL(t)uC(t)
](2.30)
La presencia del diodo en el filtro de salida hace que las características dinámicas del mismose vean afectadas, evitando que la corriente por la inductancia L sea negativa cuando la tensiónaplicada a la entrada del filtro es cero. Este efecto se modelará en el siguiente apartado medianteintegradores cuya salida está limitada entre dos valores: un mínimo y un máximo.
2.4.2. Implementación Software del ModeloPara modelar en SIMULINK el filtro de salida vamos a proceder a crear una serie de bloques,
cada vez más complejos y precisos, a los que se denominan genericamente Filtros de Salida delReductor (F*SR), que aceptan las entradas de la Tabla 2.2 y permiten obtener en sus salidas lasvariables de estado descritas por las Ec. 2.29 y 2.30.
Nombre Función o variable matemática Valor
Ug ue(t)valor que toma la señal modulada ala entrada del filtro
L L valor de la inductancia del filtro
RL RLvalor de la resistencia de pérdidasde la inductancia del filtro
IL0 iL(0) corriente inicial por la inductanciaC C valor del condensador del filtro
RC RCvalor de la resistencia equivalenteserie del condensador del filtro
UC0 uC(0) tensión inicial en el condensador
RS RSvalor de la resistencia de salida delfiltro
Tabla 2.2: Entradas de los bloques FSR
El primer bloque que se elabora es una descripción en variables de estado aplicando los bloqueslineales existentes en la biblioteca de SIMULINK, al que se denomina FSR. Este modelo del sistema
73

Capítulo 2. Método de Modelado Aplicando ...
Modelo del Filtro de Salidaen Espacio de Estados con Condiciones Iniciales
3Uc
2IL
1Us
x’ = Ax+Bu y = Cx+Du
State−Space
Demux
Demux
1Ug
Figura 2.9: Modelo de SIMULINK del Filtro de Salida del Reductor (sin encapsular)
permite, fácil y rápidamente, obtener la función de transferencia lineal del sistema. El resultado semuestra en la Fig. 2.9.
El FSR no presenta ninguna de las caracterísitcas no lineales del filtro real. Para obtener unsistema de este tipo se recurre a crear el modelo empleando elementos que modelan los diferentescoeficientes de las matrices de las Ec. 2.29 y 2.30 e integradores. Los integradores de la bibliotecade SIMULINK presentan la posibilidad de limitar su salida entre dos valores máximo y mínimo.Esto hace factible que la corriente por la inductancia no sea nunca negativa, que es el efecto queprovoca el diodo. También es posible establecer que la tensión presente en el condensador desalida no supere valores máximos y mínimos. El modelo resultante, denominado Filtro No Linealde Salida del Reductor (FNLSR) se muestra en la Fig. 2.10.
Este es el modelo no lineal en el espacio de estadosdel Filtro de Salida del Convertidor Reductor
3
Uc
2
IL1
Us
Suma2
Suma1
Suma
1s
Integrador1
1s
Integrador
C12
Gain9
C11
Gain8
B21
Gain6
B11
Gain4
A22
Gain3
A21
Gain2
D11
Gain10
A12
Gain1
A11
Gain
1
Ug
Figura 2.10: Modelo de SIMULINK del Filtro No Lineal de Salida del Reductor (sinencapsular)
Para este nuevo bloque aparecen dos entradas más, que se muestran en la Tabla 2.3. Sirven
74

2.4 El Filtro de Salida del Convertidor Reductor
para establecer los límites máximos de los integradores. La primera representa la corriente desaturación de la inductancia. Modela, de manera simple, el comportamiento no lineal que presentauna inductancia real cuando la corriente que circula por la misma provoca una saturación del flujomagnético. La segunda representa el valor de la tensión máxima del condensador. No modelaningún fenómeno físico no lineal presente en un condensador, aunque puede servir para modelar laprotección por sobretensión existente en paralelo con la resistencia de carga RS, tal como un surgearrestor.
Nombre Función o variable matemática ValorILMAX — corriente máxima por la inductanciaUCMAX — tensión máxima en el condensador
Tabla 2.3: Entradas adicionales para el bloque FNLSR
Si bien con estos dos bloques es factible obtener tanto diagramas de Bode, de respuesta alprimer armónico y transitorios (arranque suave, cambios de carga), no lo son de forma simple,ya que la variación de cualesquiera de los parámetros requiere detener la simulación, guardar elestado de las variables, cambiar el valor de los parámetros y continuar la simulación. Con objetode remediar esta situación se crea un nuevo modelo del filtro de salida, siguiendo un desarrolloanálogo al anterior, pero dejando esta vez la variable RS como una entrada al bloque de SIMULINK,de tal forma que para cambiar la respuesta del mismo sólo sea necesario establecer la variación dela función que modele la resistencia de salida.
De esta variación del filtro se han implantado dos versiones: la primera es el Filtro Variablede Salida del Reductor (FVSR), que es totalmente lineal, y la segunda es el Filtro Variable NoLineal de Salida del Reductor (FVNLSR), que presenta las mismas no linealidades del FNLSR. Elmodelo de bloques del primero se muestra en la Fig. 2.11 y el segundo en la Fig. 2.12.
2.4.3. Ensayos de los Modelos de los FSRPara comprobar que tanto el desarrollo matemático como la implantación funcional en el
modelo de SIMULINK de los distintos F*SR son correctas se llevan a cabo una serie de pruebascuyos resultados se muestran en el apartado 3.2 en la página 119 y posteriores.
75

Capítulo
2.M
étodode
Modelado
Aplicando
...
Modelo del Filtro Variable de Salidadel Convertidor Reductor para
Encapsular
3
Uc
2
IL
1
Us
suma4
suma3
suma2
suma1
V2
V1RC
RC
L
L
K3
K3
K2
K2
K1
K1
1s
Integrador1
1s
Integrador
C12
C11
C
C
B11
B11
A22
A21
A12
A113
A112
A111A11
2
RS
1
Ug
RC
RC
RS/(RC+RS)
RS/(RC+RS)
IL
IL
IL
ILIL
UC
UC
UC
UC
Ug
Figura2.11:M
odelode
SIM
UL
INK
delFiltroV
ariablede
SalidadelR
eductor(sin
encapsular)
76

2.4E
lFiltrode
SalidadelC
onvertidorR
eductor
Modelo del Filtro Variable No Lineal de Salidadel Convertidor Reductor para
Encapsular
3
Uc
2
IL
1
Us
suma4
suma3
suma2
suma1
V2
V1RC
RC
L
L
K3
K3
K2
K2
K1
K1
1s
Integrador1
1s
Integrador
C12
C11
C
C
B11
B11
A22
A21
A12
A113
A112
A111A11
2
RS
1
Ug
RC
RC
RS/(RC+RS)
RS/(RC+RS)
IL
IL
IL
ILIL
UC
UC
UC
UC
Ug
Figura2.12:
Modelo
deS
IMU
LIN
Kdel
FiltroV
ariableN
oL
inealde
Salidadel
Reductor(sin
encapsular)
77

Capítulo 2. Método de Modelado Aplicando ...
2.5. El Filtro de Salida del Convertidor ElevadorAl igual que con el filtros de salida del reductor, de la observación de la etapa de salida de los
convertidores de la Fig. 2.2, se aprecia que la disposición topológica de L+D+CR constituye unfiltro paso bajo destinado a “suavizar” los pulsos de corriente provenientes de la fuente de entrada,la inductancia L y el interruptor controlado. Es, por lo tanto, parte fundamental de la dinámica quepresenta el convertidor. Para llevar a cabo el modelado se comenzará con el filtro de salida de unatopología elevadora, que se representa en la Fig. 2.13 con los elementos parásitos más importantesde sus componentes.
Figura 2.13: Filtro de salida de un convertidor elevador con componentes parásitos
En el caso del convertidor reductor los elementos pasivos conforman un filtro pasivo de salida,cuya topología no cambia a lo largo de la secuencia de conmutación. En el caso del convertidorelevador la topología se altera por la presencia de los interruptores semiconductores, dando paso aun modelo no lineal, cuyo análisis se aborda en B.7 en la página 186.
2.5.1. Análisis MatemáticoDel circuito de la Fig. 2.13 y del análisis en B.7 en la página 186, se obtiene el modelo no lineal
del espacio de estados, para el cual se definen
fiL(t) =
{0 iL(t) ≤ 01 iL(t) > 0 (2.31)
fS(t) =
{0 Si interruptor cerrado1 Si interruptor abierto
(2.32)
Lo que permite expresar las matrices del espacio de estados para el convertidor elevador como:
[diL(t)
dtduC(t)
dt
]=
fiL(t) ·
(− fS(t) · RCRS
L(RC+RS)− RL
L
)fS(t) · fiL(t) ·
(− RS
L(RC+RS)
)
fS(t) · fiL(t) ·(
RSC(RC+RS)
)− 1
C(RC+RS)
[iL(t)uC(t)
]+
+
[fiL(t) · 1
L0
]uE(t)
(2.33)
78

2.5 El Filtro de Salida del Convertidor Elevador
uS(t) =[
fS(t) · fiL(t) ·(
RCRSRC+RS
)RS
RC+RS
][iL(t)uC(t)
](2.34)
2.5.2. Implementación Software del ModeloDel mismo modo que se implanta el modelo en SIMULINK del filtro de salida del reductor,
vamos a proceder a crear un bloque, esta vez centrándonos en la capacidad de ser variable y nolineal, al que denominamos Filtro Variable No Lineal de Salida del Elevador (FVNLSE), queacepta las entradas de la Tabla 2.4 y permite obtener en sus salidas las variables de estado descritaspor las Ec. 2.33 y 2.34.
Nombre Función o variable matemática Valor
Ug fS(t)valor que toma la señal que modelael interruptor controlado
L L valor de la inductancia del filtro
RL RLvalor de la resistencia de pérdidasde la inductancia del filtro
IL0 iL(0) corriente inicial por la inductanciaILMAX - corriente máxima por la inductancia
C C valor del condensador del filtro
RC RCvalor de la resistencia equivalenteserie del condensador del filtro
UC0 uC(0) tensión inicial en el condensadorUCMAX - tensión máxima en el condensador
RS RSvalor de la resistencia de salida delfiltro
Tabla 2.4: Entradas del bloque FVNLSE
En el caso del convertidor elevador, la corriente por la inductancia sólo puede venir acotadapor dos valores. El primero es el que presenta el componente magnético cuando se satura, lo querepresenta un máximo de corriente. El segundo es el valor cero, ya que la presencia del diodo enel filtro hace imposible la circulación de corriente desde el condensador a la fuente de entrada através de la inductancia.
Los integradores de la biblioteca de SIMULINK presentan la posibilidad de limitar su salidaentre dos valores máximo y mínimo. Esto hace factible modelar que la corriente por la inductanciano sea nunca negativa, que es el efecto que provoca el diodo. También es posible establecer que latensión presente en el condensador de salida no supere valores máximos y mínimos.
Con este bloque es factible obtener tanto diagramas de Bode, de respuesta al primer armónicoy transitorios (arranque suave, cambios de carga) de forma simple. Esto se consigue dejando, talcomo se ha hecho con el filtro de salida del reductor, la variable RS como una entrada al bloque deSIMULINK, de tal forma que para cambiar la respuesta del mismo sólo sea necesario establecer la
79

Capítulo 2. Método de Modelado Aplicando ...
variación de la función que modele la resistencia de salida. El modelo de bloques del FVNLSE semuestra en la Fig. 2.14.
Mod
elo
del F
iltro
Var
iabl
e N
o L
inea
l de
Salid
ade
l Con
vert
idor
Ele
vado
r par
aE
ncap
sula
r
3 Uc
2 IL1 Us
sum
a4
sum
a3
sum
a2
sum
a1
V2
V1
>=
Rel
atio
nal
Ope
rato
r
RC
RC L L
B11 KB
11
K2
K2
K1
K1
1 s
Inte
grad
or1
1 s
Inte
grad
or0
Cer
o
C12
C11
C C
B1
A22
A21
A12
A11
1A
11
3 RS
2 Ug 1 U
e
RC
RC
RS/
(RC
+RS)
RS/
(RC
+RS)
RS/
(RC
+RS)
RS/
(RC
+RS)
IL
IL
IL
IL
IL
UC
UC
UC
UC
FIL
FIL
Ug
Figura 2.14: Modelo de SIMULINK del Filtro Variable de Salida del Elevador (sinencapsular)
El proceso de modelado de la topología elevadora se presenta como punto de partida de laslineas futuras de investigación, que pueden dar lugar a la comprobación funcional del modelo y suaplicación en paralelizado.
80

2.6 Los Circuitos Compensadores
2.6. Los Circuitos CompensadoresPara completar el desarrollo del modelo es necesario crear bloques que permitan compensar la
dinámica de la etapa de potencia (modelado por el conjunto de GTCc y F*SR). Con este objetivo sehan elaborado un conjunto de bloques que modelan diversos circuitos compensadores, obtenidos deaplicaciones existentes en la literatura técnica. No existe una nomenclatura específica para estoscircuitos, por lo que se ha adoptado un orden de menor a mayor número de componentes queintegran la red de compensación.
2.6.1. Circuito Compensador Tipo ILa primera topología que se modela se representa en la Fig. 2.15.
Figura 2.15: Compensador Tipo I
Su función de transferencia lineal viene dada por:
H(s) =US(s)UM(s)
=1+ sR2C2
s(C1 +C2)R1 + s2C1C2R1R2(2.35)
y su modelo en el espacio de estados lineal por:[
duC1 (t)dt
duC2 (t)dt
]=
[− 1
R2C11
R2C11
R2C2− 1
R2C2
][uC1(t)uC2(t)
]+
[ 1R1C1
− 1R1C1
0 0
][ue(t)
ure f (t)
](2.36)
uS(t) =[−1 0
][uC1(t)uC2(t)
]+
[0 1
][ue(t)
ure f (t)
](2.37)
Para modelar en SIMULINK el compensador se crean dos bloques a los que se denominanCompensador I (Comp1) y Compensador No Lineal I (CompNL1), que acepten las entradas de laTabla 2.5 y permitan obtener en sus salidas las variables descritas por las Ec. 2.36 y 2.37.
81
Capítulo 2. Método de Modelado Aplicando ...
Nombre Función o variable matemática Valor
Um Ksus(t)valor que toma la muestra de latensión de salida del convertidor ala entrada del circuito compensador
Uref ure f (t) valor de la tensión de referencia
C1, C2, R1, R2 C1,C2,R1,R2valor de los condensadores yresistores del circuito compensador
UC10, UC20 uC1(t), uC2(t) tensión inicial en los condensadores
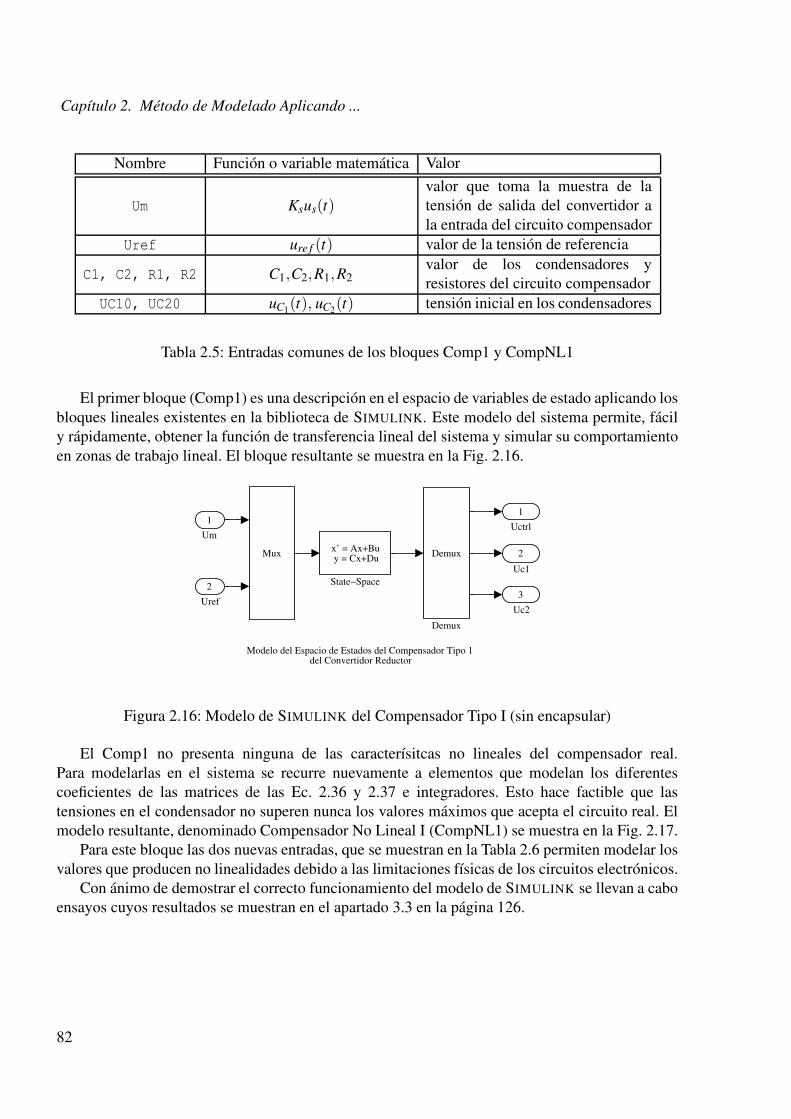
Tabla 2.5: Entradas comunes de los bloques Comp1 y CompNL1
El primer bloque (Comp1) es una descripción en el espacio de variables de estado aplicando losbloques lineales existentes en la biblioteca de SIMULINK. Este modelo del sistema permite, fácily rápidamente, obtener la función de transferencia lineal del sistema y simular su comportamientoen zonas de trabajo lineal. El bloque resultante se muestra en la Fig. 2.16.
Modelo del Espacio de Estados del Compensador Tipo 1del Convertidor Reductor
3Uc2
2
Uc1
1Uctrl
x’ = Ax+Bu y = Cx+Du
State−Space
Mux Demux
Demux
2Uref
1Um
Figura 2.16: Modelo de SIMULINK del Compensador Tipo I (sin encapsular)
El Comp1 no presenta ninguna de las caracterísitcas no lineales del compensador real.Para modelarlas en el sistema se recurre nuevamente a elementos que modelan los diferentescoeficientes de las matrices de las Ec. 2.36 y 2.37 e integradores. Esto hace factible que lastensiones en el condensador no superen nunca los valores máximos que acepta el circuito real. Elmodelo resultante, denominado Compensador No Lineal I (CompNL1) se muestra en la Fig. 2.17.
Para este bloque las dos nuevas entradas, que se muestran en la Tabla 2.6 permiten modelar losvalores que producen no linealidades debido a las limitaciones físicas de los circuitos electrónicos.
Con ánimo de demostrar el correcto funcionamiento del modelo de SIMULINK se llevan a caboensayos cuyos resultados se muestran en el apartado 3.3 en la página 126.
82

2.6 Los Circuitos Compensadores
3
Uc2
2
Uc1
1
Uctrl
Suma2
Suma1
Suma
Saturation
1s
Integrador1
1s
Integrador
C11
Gain8
B12
Gain5
B11
Gain4
A22
Gain3
A21
Gain2
D12
Gain11
A12
Gain1
A11
Gain
2
Uref
1
Um
Figura 2.17: Modelo de SIMULINK del Compensador No Lineal Tipo I (sinencapsular)
Nombre Función o variable matemática Valor
VDC —tensión de alimentación del circuitocompensador
EAmpMax, EAmpMin —
tensión máxima y mínima que sepuede obtener de la salida delamplificador de error del circuitocompensador
Tabla 2.6: Entradas adicionales para el bloque CompNL1
83

Capítulo 2. Método de Modelado Aplicando ...
2.6.2. Circuito Compensador Tipo IILa segunda topología que se modela se representa en la Fig. 2.18.
Figura 2.18: Compensador Tipo II
Su función de transferencia viene dada por:
H(s) =US(s)UM(s)
=Us(s)Ue(s)
= −C1C2R2R3s2 +(C1R2 +C2R3)s+1C1C2R1R2s2 +(C2R2 +C2R1)s
(2.38)
y su modelo en el espacio de estados por:
[duC1 (t)
dtduC2 (t)
dt
]=
[−
(1
R2C1+ 1
R1C1
)0
− 1R1C2
0
][uC1(t)uC2(t)
]
+
[ 1R1C1
− 1R1C1
1R1C2
−(
1R1C2
+ 1R4C2
)][
ue(t)ure f (t)
](2.39)
us(t) =[
R3R1
−1][
uC1(t)uC2(t)
]
+[−R3
R11+ R3
R1+ R3
R4
][ue(t)
ure f (t)
](2.40)
Para modelar en SIMULINK el compensador se crean dos bloques a los que se denominanCompensador II (Comp2) y Compensador No Lineal II (CompNL2), que acepten las entradas dela Tabla 2.7 y permitan obtener en sus salidas las variables descritas por las Ec. 2.39 y 2.40.
Nótese que la resistencia R5 no influye en el modelo, pero su presencia suele ser necesariapara compensar la dinámica del amplificador de error y su valor suele venir recomendado porel fabricante a partir de una fórmula empírica. El primer bloque (Comp2) es una descripciónen el espacio de variables de estado aplicando los bloques lineales existentes en la bibliotecade SIMULINK. Este modelo del sistema permite, fácil y rápidamente, obtener la función de
84

2.6 Los Circuitos Compensadores
Nombre Función o variable matemática Valor
Um Ksus(t)valor que toma la muestra de latensión de salida del convertidor ala entrada del circuito compensador
Uref ure f (t) valor de la tensión de referencia
C1, C2, R1, R2, R3, R4 C1,C2,R1,R2,R3,R4valor de los condensadores yresistores del circuito compensador
UC10, UC20 uC1(t), uC2(t) tensión inicial en los condensadores
Tabla 2.7: Entradas comunes de los bloques Comp2 y CompNL2
transferencia lineal del sistema y simular su comportamiento en zonas de trabajo lineal. El bloqueresultante es similar internamente al Comp1 y se muestra en la Fig. 2.16 en la página 82.
El Comp2 no presenta ninguna de las caracterísitcas no lineales del compensador real.Para modelarlas en el sistema se recurre nuevamente a elementos que modelan los diferentescoeficientes de las matrices de las Ec. 2.39 y 2.40 e integradores. Los integradores de la bibliotecade SIMULINK presentan la posibilidad de limitar su salida entre dos valores máximo y mínimo.Esto hace factible que las tensiones en el condensador no superen nunca los valores máximos queacepta el circuito real. El modelo resultante, denominado Compensador No Lineal II (CompNL2)se muestra en la Fig. 2.19.
Para este nuevo bloque aparecen dos entradas más, que se muestran en la Tabla 2.8. Sirven paraestablecer los límites máximos de los integradores y de la saturación existente a la salida. Estosvalores permiten modelar los valores que producen no linealidades debido a las limitaciones físicasde los circuitos electrónicos.
Nombre Función o variable matemática Valor
VDC —tensión de alimentación del circuitocompensador
EAmpMax, EAmpMin —
tensión máxima y mínima que sepuede obtener de la salida delamplificador de error del circuitocompensador
Tabla 2.8: Entradas adicionales para el bloque CompNL2
Con ánimo de demostrar el correcto funcionamiento del modelo de SIMULINK se llevan a caboensayos cuyos resultados se muestran en el apartado en la página 128
85

Capítulo 2. Método de Modelado Aplicando ...
3
Uc2
2
Uc11
Uctrl
Suma2
Suma1
Suma
Saturation
1s
Integrador1
1s
Integrador
C12
Gain9
C11
Gain8
B22
Gain7
B21
Gain6
B12
Gain5
B11
Gain4
A22
Gain3
A21
Gain2
D12
Gain11
D11
Gain10
A12
Gain1
A11
Gain
2
Uref
1
Um
Figura 2.19: Modelo de SIMULINK del Compensador No Lineal Tipo II (sinencapsular)
86

2.7 Paralelizado de Convertidores Reductores
2.7. Paralelizado de Convertidores Reductores
2.7.1. El Filtro de Salida
En el caso de tener dos o más convertidores reductores trabajando en paralelo, el modelo delfiltro de salida aumenta su complejidad. De la observación del circuito de N convertidores enparalelo, se aprecia nuevamente que todos son circuitos LCR+D. Sigue siendo, por lo tanto, partefundamental de la dinámica que presenta el conjunto de convertidores.
Figura 2.20: Filtro de salida de N convertidores reductores con componentesparásitos
2.7.2. Análisis Matemático
De este circuito se obtiene el modelo del espacio de estados (ver el desarrollo matemático enel apartado B.6 en la página 183), que viene descrito por las siguientes matrices:
B =
1L1
0 · · · 0 00 1
L2· · · 0 0
...... . . . ...
...0 0 · · · 1
LN0
0 0 0 0 0
(2.41)
C =[
RCN RSRCN +RS
RCN RSRCN +RS
· · · RCN RSRCN +RS
RSRCN +RS
](2.42)
87

Capítulo 2. Método de Modelado Aplicando ...
A =
−RCN(RS+RL1)+RL1RS
L1(RCN +RS)− RCN RS
L1(RCN +RS)... − RCN RS
L1(RCN +RS)− RS
L1(RCN +RS)
− RCN RS
L2(RCN +RS)−RCN(RS+RL2)+RL2RS
L2(RCN +RS)... − RCN RS
L2(RCN +RS)− RS
L2(RCN +RS)... . . . ...
− RCN RS
LN(RCN +RS)− RCN RS
LN(RCN +RS)... −RCN(RS+RLN )+RLN RS
LN(RCN +RS)− RS
LN(RCN +RS)RS
CN(RCN +RS)RS
CN(RCN +RS)... RS
CN(RCN +RS)− 1
CN(RC+RS)
(2.43)Nuevamente hay que destacar que la presencia de los diodos en el filtro de salida de N
convertidores hace que las características dinámicas del mismo se vean afectadas, evitando que lascorriente por la inductancias L1,2...N sean negativas. Es también factible establecer que la tensiónen el condensador equivalente CN sólo puede ser positiva o cero.
2.7.3. Implementación Software del Modelo
En el simulador no es posible crear un bloque que se adapte dinámicamente al número deconvertidores que deseamos simular. Por esta razón se modela, como ejemplo de la capacidad delmodelo, en SIMULINK el filtro de salida de 2 convertidores en paralelo. Se crean dos bloques,empleando la misma técnica de modelado que para el filtro de salida de un único convertidor, a losque se denominan genericamente Filtro de Salida de Dos Reductores (FS2R) y Filtro Variable deSalida de Dos Reductores (FVS2R), que aceptan las entradas de la Tabla 2.9 y permiten obteneren sus salidas las variables de estado uS(t), uC(t), IL1(t) e IL2(t).
Nombre Función o variable matemática Valor
Ug1, Ug2 ue1(t), ue2(t)valores de las señales de entrada alfiltro
L1, L2 L1, L2 valores de las inductancias
RL1, RL2 RL1, RL2
valores de las resistencias depérdidas de las inductancias
IL0, IL1 iL1(0), iL2(0)corrientes iniciales por lasinductancias
C C valor del condensador equivalente
RC RCvalor de la resistencia equivalenteserie del condensador
UC0 uC(0) tensión inicial en el condensador
RS RS
valor de la resistencia de salida delfiltro. Es una constante en FS2R yuna entrada en FVS2R
Tabla 2.9: Entradas de los bloques FS2R y FVS2R
88

2.7 Paralelizado de Convertidores Reductores
El primer bloque (FS2R) se crea empleando elementos que modelan los diferentes coeficientesde las matrices de las Ec. 2.43, 2.41 y 2.42 e integradores. Los integradores de la biblioteca deSIMULINK presentan la posibilidad de limitar su salida entre dos valores máximo y mínimo. Estohace factible que las corrientes por las inductancias no sean nunca negativas, que es el efecto queprovocan los diodos. El modelo resultante, denominado Filtro de Salida del Dos Reductor (FS2R),inheremente no lineal, se muestra en la Fig. 2.21.
Este es el modelo no lineal en el espacio de estadosdel Filtro de Salida de Dos Convertidores Reductores en Paralelo
4
Uc
3
IL2
2
IL1
1
Us
Suma3
Suma2
Suma1
Suma
1s
Integrador2
1s
Integrador1
1s
Integrador
[Uc]
Goto Uc
[IL2]
Goto IL2
[IL1]
Goto IL1
[Uc]
From Uc 3
[Uc]
From Uc 2
[Uc]
From Uc 1
[IL2]
From IL2 3
[IL2]
From IL2 2
[IL2]
From IL2 1
[IL1]
From IL1 3
[IL1]
From IL1 2
[IL1]
From IL1 1 C3
C3
C2
C2
C1
C1
B22
B22
B11
B11
A33
A33
A32
A32
A31
A31
A23
A23
A22
A22
A21
A21
A13
A13
A12
A12
A11
A11
2
Ug2
1
Ug1
Figura 2.21: Modelo de SIMULINK del Filtro de Salida de Dos Reductores (sinencapsular)
Para este nuevo bloque aparecen tres entradas más, que se muestran en la Tabla 2.10. Sirvenpara establecer los límites máximos de los integradores. Las dos primeras representan las corrientesde saturación de las inductancias. Modelan, de manera simple, el comportamiento no lineal quepresenta una inductancia real cuando la corriente que circula por la misma provoca una saturacióndel flujo magnético. La tercera representa el valor de la tensión máxima del condensador.
Si bien con este bloque es factible obtener tanto diagramas de Bode, de respuesta al primerarmónico y transitorios (arranque suave, cambios de carga), no lo son de forma simple, ya que la
89

Capítulo 2. Método de Modelado Aplicando ...
Nombre Función o variable matemática ValorIL1MAX, IL2MAX — corriente máxima por la inductancia
UCMAX — tensión máxima en el condensador
Tabla 2.10: Entradas adicionales para el bloque FS2R
variación de cualesquiera de los parámetros requiere detener la simulación, guardar el estado de lasvariables, cambiar el valor de los parámetros y continuar la simulación. Con objeto de remediar estasituación se crea un nuevo modelo del filtro de salida de dos reductores, siguiendo un desarrolloanálogo al anterior, pero dejando esta vez la variable RS como una entrada al bloque de SIMULINK,de tal forma que para cambiar la respuesta del mismo sólo sea necesario establecer la variación dela función que modele la resistencia de salida.
Para conseguir esto se crea un bloque al que se denomina Filtro Variable de Salida de DosReductores (FVS2R), que también es inherentemente no lineal y cuyo modelo se muestra en laFig. 2.22.
2.7.4. Ensayos de los Modelos FS2R y FVS2RPara comprobar que tanto el desarrollo matemático como la implantación funcional en el
modelo de SIMULINK de los distintos F*S2R son correctas se llevan a cabo una serie de pruebascuyos resultados se muestran en el apartado 3.7 en la página 135.
90

2.7 Paralelizado de Convertidores Reductores
4
Uc
3
IL2
2
IL1
1
Us
V9
V8
V7
V6
V5
V4V3V2
V16
V15
V14
V13
V12
V11
V10
V1
Suma 4
Suma 3Suma 2Suma 1
S1
RL2
RL2RL1
RL1
RC
RC
P9
P8
P7
P6
P5
P4
P3
P2
P13
P12
P11
P10
P1
L2
L2L1
L1
1s
Integrador 3
1s
Integrador 2
1s
Integrador
[Uc]
Goto Uc
[KV3]
Goto KV3
[KV2]
Goto KV2
[KV1]
Goto KV1
[IL2]
Goto IL2
[IL1]
Goto IL1
[B22]
Goto B22[B11]
Goto B11
[A33]
Goto A33
[A3]
Goto A3
[A23]
Goto A23
[A22]
Goto A22
[A21]
Goto A21
[A13]
Goto A13
[A12]
Goto A12
[A11]
Goto A11
[Uc]
From Uc 3
[Uc]
From Uc 2
[Uc]
From Uc 1
[KV3]
From KV3 3
[KV3]
From KV3 2[KV3]
From KV3 1
[KV2]
From KV2 4
[KV2]
From KV2 3[KV2]
From KV2 2 [KV2]
From KV2 1
[KV1]
From KV1 1
[IL2]
From IL2 3
[IL2]
From IL2 2
[IL2]
From IL2 1
[IL1]
From IL1 3
[IL1]
From IL1 2
[IL1]
From IL1 1
[B22]
From B22 1
[B11]
From B11 1
[A33]
From A33 1
[A3]
From A3 2
[A3]
From A3 1
[A23]
From A23 1
[A22]
From A22 1
[A21]
From A21 2
[A21]
From A21 1
[A13]
From A13 1
[A12]
From A12 2
[A12]
From A12 1
[A11]
From A11 1
C
C
1
1.31
1.2
1
1.1
3
RS
2
Ug2
1
Ug1
RS
RC RS+RC
Figura 2.22: Modelo de SIMULINK del Filtro Variable de Salida de Dos Reductores(sin encapsular)
91

Capítulo 2. Método de Modelado Aplicando ...
2.8. La Biblioteca de SimulinkTodos los desarrollos de los modelos y sus implantaciones software han dado lugar a una
biblioteca de módulos, que se encuentra disponible en el CD adjunto de la tesis. Su empleo requieredisponer de MATLAB versión 6 (ó superior) y SIMULINK versión 4 (ó superior) para poder simularlos modelos. Los bloques que contiene se muestran en la Fig. 2.23.
Ue
Delta
Phi
PS
Ug
Uc
GTCc
Ug
RS
Us
IL
Uc
FVSR
Ug1
Ug2
RS
Us
IL1
IL2
Uc
FVS2R
Ug
RS
Us
IL
Uc
FVNLSR
Ue
Ug
RS
Us
IL
Uc
FVNLSE
Ug
Us
IL
Uc
FSR
Ug1
Ug2
Us
IL1
IL2
Uc
FS2R
Ug
Us
IL
Uc
FNLSR
Um
Uref
Uctrl
Uc1
Uc2
CompNL2
Um
Uref
Uctrl
Uc1
Uc2
CompNL1
Um
Uref
Uctrl
Uc1
Uc2
Comp2
Um
Uref
Uctrl
Uc1
Uc2
Comp1
Figura 2.23: Biblioteca SIMULINK de bloques
92