Embed Size (px)
Citation preview
CAPÍTULO 3
Diseño Conceptual
Una vez que se dispone de las especificaciones y se conoce suficientemente todos los aspectos relativos al sistema, se procede entonces a buscar las características que mejor cumplan ese perfil.
Un diseño conceptual puede definirse como aquél que representa la totalidad del objeto proyectado, es decir, representa la suma de todos los subsistemas y componentes que integran el sistema completo. En definitiva, debe dar solución a los problemas que plantean las especificaciones y proponer un modelo global que realice las funciones necesarias.
La fase de diseño conceptual puede dividirse en dos etapas:
1. Generación de soluciones que satisfagan la necesidad percibida.
2. Evaluación de las mismas para escoger la mejor valorada.
En cuanto a la primera etapa, las soluciones conceptuales son por lo general dispositivos diseñados de forma global, donde no se ha entrado en detalle a desarrollar subsistemas y componentes, sino que se centran en la forma y las funciones principales. En algunas ocasiones, sí puede ser necesario un nivel de detalle bastante alto con el objetivo de poder tener mejores criterios a la hora de seleccionar alternativas. De
Capítulo 3: Diseño Conceptual 11
cualquier manera, las propuestas que surgen tras la etapa de diseño conceptual deben definir el mecanismo completamente, aunque no sea en detalle.
Por otro lado, para evaluar correctamente los distintos conceptos generados, es
necesario fijar y acordar unos criterios de selección. Los criterios se deberían establecer a partir de las especificaciones, dado que en ellas se recoge el tipo de objeto que se debe diseñar. El diseño conceptual de nuestro mecanismo Ball & Beam va a estar dividido en dos partes:
1. Dimensionamiento y modelo matemático: corresponde a la etapa de generación de soluciones, y en ésta se van a definir las propiedades geométricas y físicas del mecanismo. Además se va a obtener el modelo matemático del sistema para su posterior uso en control. También se llevan a cabo algunas evaluaciones de propuestas.
2. Simulación: es propiamente la etapa de evaluación de soluciones. En
ésta se lleva a cabo una simulación en Matlab para ver si las soluciones propuestas realizan correctamente las funciones deseadas.
Capítulo 3: Diseño Conceptual 12
A.
Dimensionamiento
y Modelo Matemático
Capítulo 3: Diseño Conceptual 13
1. Primer Diseño
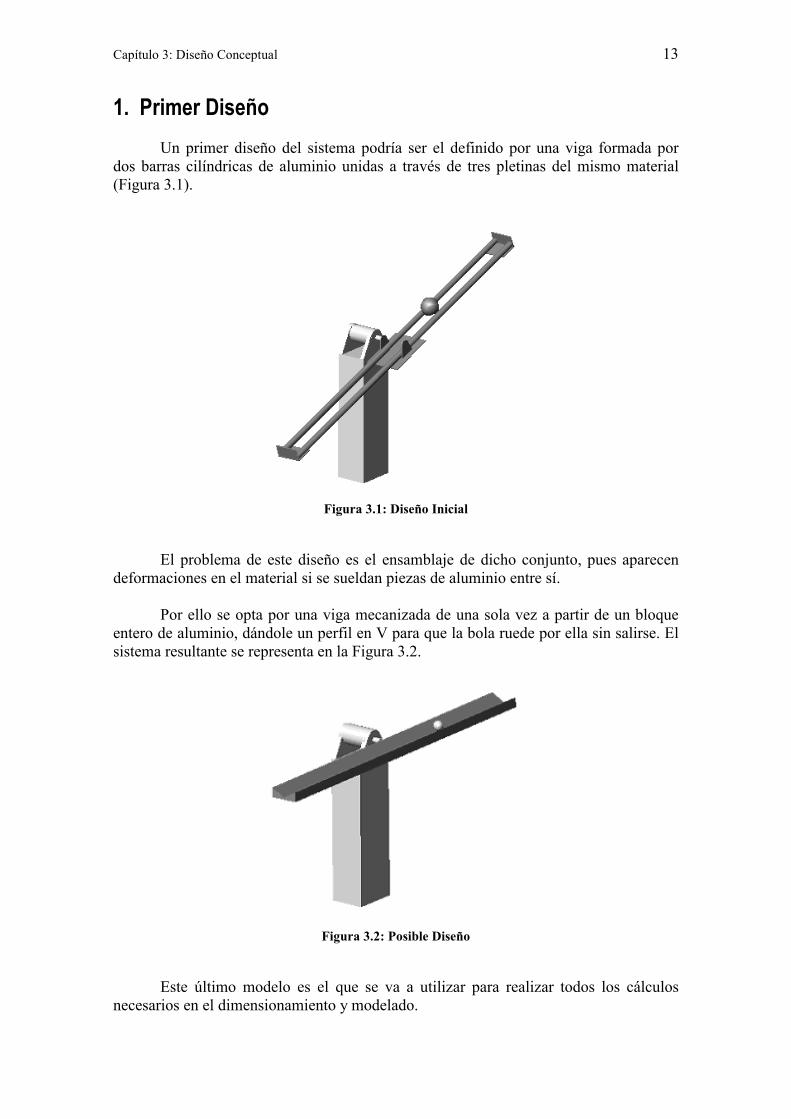
Un primer diseño del sistema podría ser el definido por una viga formada por dos barras cilíndricas de aluminio unidas a través de tres pletinas del mismo material (Figura 3.1).
Figura 3.1: Diseño Inicial
El problema de este diseño es el ensamblaje de dicho conjunto, pues aparecen
deformaciones en el material si se sueldan piezas de aluminio entre sí. Por ello se opta por una viga mecanizada de una sola vez a partir de un bloque
entero de aluminio, dándole un perfil en V para que la bola ruede por ella sin salirse. El sistema resultante se representa en la Figura 3.2.
Figura 3.2: Posible Diseño
Este último modelo es el que se va a utilizar para realizar todos los cálculos necesarios en el dimensionamiento y modelado.
Capítulo 3: Diseño Conceptual 14
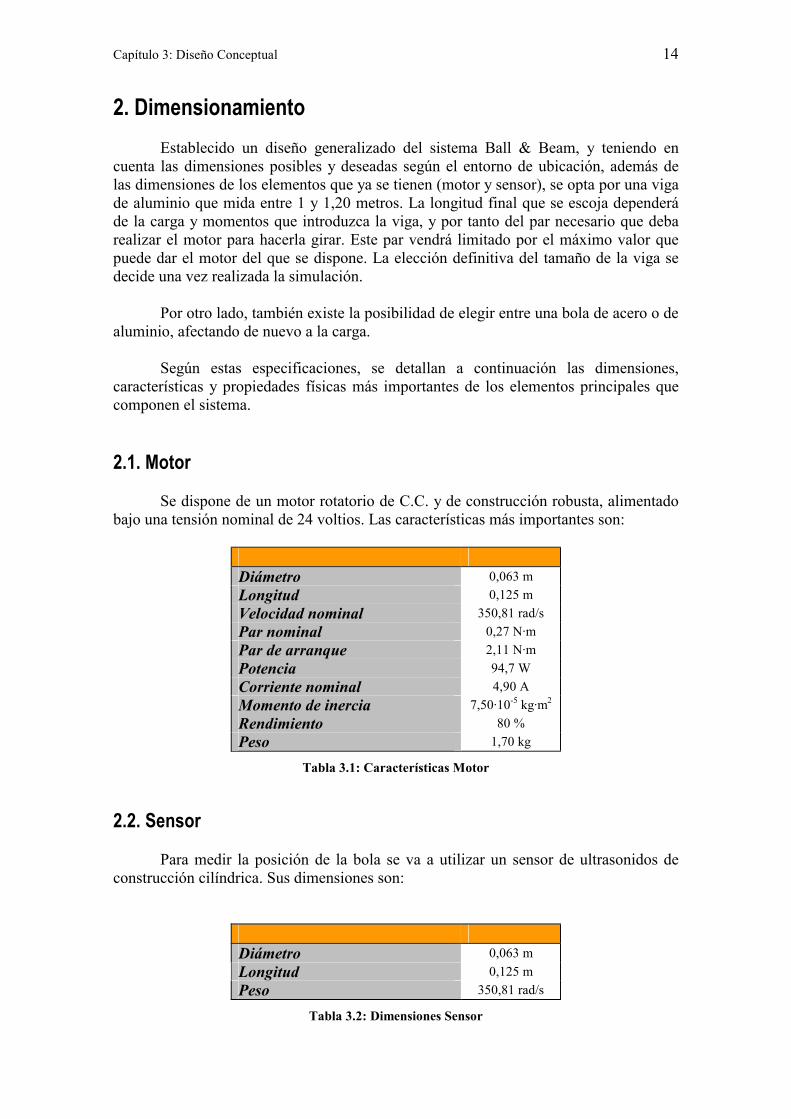
2. Dimensionamiento Establecido un diseño generalizado del sistema Ball & Beam, y teniendo en cuenta las dimensiones posibles y deseadas según el entorno de ubicación, además de las dimensiones de los elementos que ya se tienen (motor y sensor), se opta por una viga de aluminio que mida entre 1 y 1,20 metros. La longitud final que se escoja dependerá de la carga y momentos que introduzca la viga, y por tanto del par necesario que deba realizar el motor para hacerla girar. Este par vendrá limitado por el máximo valor que puede dar el motor del que se dispone. La elección definitiva del tamaño de la viga se decide una vez realizada la simulación. Por otro lado, también existe la posibilidad de elegir entre una bola de acero o de aluminio, afectando de nuevo a la carga. Según estas especificaciones, se detallan a continuación las dimensiones, características y propiedades físicas más importantes de los elementos principales que componen el sistema. 2.1. Motor Se dispone de un motor rotatorio de C.C. y de construcción robusta, alimentado bajo una tensión nominal de 24 voltios. Las características más importantes son:
Diámetro 0,063 m Longitud 0,125 m Velocidad nominal 350,81 rad/s Par nominal 0,27 N·m Par de arranque 2,11 N·m Potencia 94,7 W Corriente nominal 4,90 A Momento de inercia 7,50·10-5 kg·m2 Rendimiento 80 % Peso 1,70 kg
Tabla 3.1: Características Motor
2.2. Sensor Para medir la posición de la bola se va a utilizar un sensor de ultrasonidos de construcción cilíndrica. Sus dimensiones son:
Diámetro 0,063 m Longitud 0,125 m Peso 350,81 rad/s
Tabla 3.2: Dimensiones Sensor

Capítulo 3: Diseño Conceptual 15
2.3. Bola Para estar en concordancia con la viga, la bola que rueda por ella va a tener un radio de 15 milímetros y por tanto un volumen aproximado de 1,41·10-5 m3 (V=4/3·π·R3). Como se ha mencionado anteriormente, se puede elegir entre bola de aluminio o de acero. 2.3.1. Bola de aluminio
Posee las siguientes características:
Densidad (ρ) 2920 kg/m3 Masa (m=ρ·V) 0,41·10-1 kg Momento de Inercia respecto a cualquiera de sus ejes (Ib=2/5·m·R2) 3,69·10-6 kg·m2
Módulo de elasticidad (E) 7·1010 N/m2
Tabla 3.3: Características Bola de Aluminio
2.3.2. Bola de acero
Características:
Densidad (ρ) 7800 kg/m3 Masa (m=ρ·V) 0,11 kg Momento de Inercia respecto a cualquiera de sus ejes (Ib=2/5·m·R2) 9,90·10-6 kg·m2
Módulo de elasticidad (E) 2,10·1011 N/m2
Tabla 3.4: Características Bola de Acero
2.4. Viga
Para conseguir que la carga no sea excesiva, se va a fabricar de aluminio por ser un material de poca densidad (ρ = 2920 kg/m3) y con bajo módulo de elasticidad (E = 7·1010 N/m2).
Por otro lado ya se ha establecido que la longitud de la viga esté entre 1 y 1,20
metros. 2.4.1. Perfil En primer lugar se pretende averiguar la inclinación que tendrán las caras del carril sobre las que apoyará la bola. La elección de este ángulo, como se demostrará a continuación, depende del máximo ángulo que pueda girar la viga para que la bola
Capítulo 3: Diseño Conceptual 16
ruede y no deslice por ella. Se trata por tanto del estudio de la fricción o fuerza de rozamiento existente entre ambos elementos.
La fricción se puede definir como la fuerza de contacto que existe entre dos cuerpos y que dificulta o imposibilita el deslizamiento o movimiento entre ambos. Esta fuerza es debida a los enlaces de las moléculas de los cuerpos en aquellos lugares donde las superficies están en íntimo contacto. Cuando la ausencia de movimiento es total, se habla de fricción estática fe, la cual varía desde cero hasta un valor máximo fe,max. La fricción estática actúa en sentido contrario al componente de una fuerza aplicada a lo largo de la superficie de deslizamiento. Cuando esta fuerza aplicada es tal que produce el movimiento relativo entre los cuerpos, se habla de fricción cinética fc, la cual actúa en sentido contrario al de la velocidad de un cuerpo moviéndose sobre el otro, en su punto de contacto. Por tanto, la magnitud de la fricción cinética es menor que el valor máximo de la fricción estática. Ambas magnitudes de fricción son independientes del área de contacto aparente entre las dos superficies, y son proporcionales a la magnitud N de la fuerza normal que ejerce una de las superficies sobre la otra. La constante de proporcionalidad que relaciona la fuerza de fricción con la fuerza normal es el coeficiente de fricción µ. Esta constante adimensional, que depende del tipo de superficies que intervienen, se determina experimentalmente. Estas relaciones se expresan en ecuaciones del siguiente modo:
Nf ee ⋅≤ µ Nf ee ⋅= µmax, Nf cc ⋅= µ
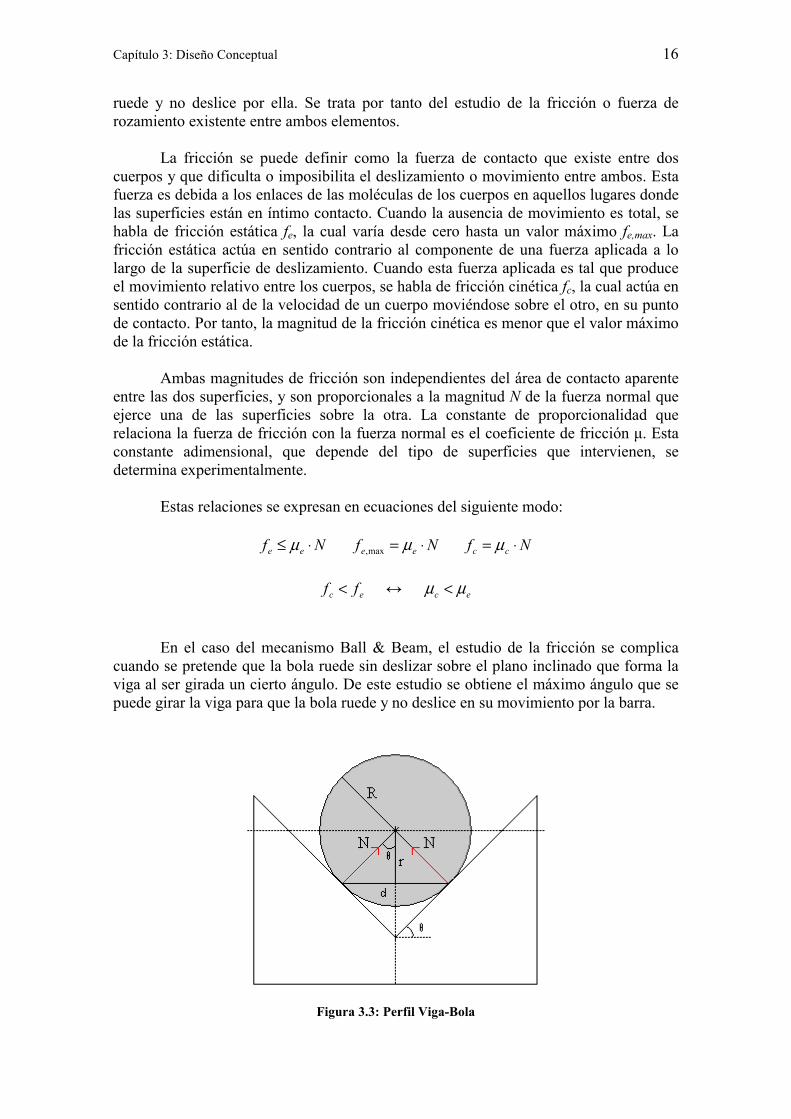
ec ff < ↔ ec µµ < En el caso del mecanismo Ball & Beam, el estudio de la fricción se complica cuando se pretende que la bola ruede sin deslizar sobre el plano inclinado que forma la viga al ser girada un cierto ángulo. De este estudio se obtiene el máximo ángulo que se puede girar la viga para que la bola ruede y no deslice en su movimiento por la barra.
Figura 3.3: Perfil Viga-Bola

Capítulo 3: Diseño Conceptual 17
Partimos de la situación dada en las figuras 3.3 y 3.4, en la que la esfera se va a encontrar apoyada en dos puntos del carril que forma la viga. Supondremos la existencia de rozamientos iguales en cada uno de esos puntos de apoyo. Según las relaciones geométricas dadas en la primera figura, r y d se pueden expresar en función del radio de la esfera R del siguiente modo:
θcos⋅= Rr ↔ θcos
1=rR
θsenRd ⋅= 2 ↔ 222 rRd −=
Figura 3.4: Viga Inclinada y Bola Rodando
De igual forma, se definen las magnitudes FT y NT como las resultantes de las fuerzas de rozamiento y de las reacciones de la superficie de la viga sobre la esfera respectivamente:
RT FF ⋅= 2
θcos2 NNT ⋅= El primer paso consiste en averiguar las ecuaciones de movimiento de la esfera. Cuando ésta rueda hacia abajo por el plano inclinado, el centro de masas sufre dos tipos de movimiento:
• Traslación
amFsengm RT ⋅=−⋅⋅ β (1)
• Rotación, alrededor de un eje que pasa por el CM
α⋅=⋅ CRT IrF (2)

Capítulo 3: Diseño Conceptual 18
Ambos movimientos se relacionan a través de la condición de rodadura:
α⋅= ra (3) Además, si se hace equilibrio de fuerzas en la dirección perpendicular al plano inclinado se tiene el valor de la reacción total en la superficie:
βcos⋅⋅= gmNT (4) A partir de estas ecuaciones obtenemos los valores de la aceleración a, y de la fuerza de rozamiento FR y de la reacción N en un apoyo. Partiendo de la ecuación (1) y haciendo uso de (2) y (3) se obtiene:
amr
Isengm C ⋅=⋅−⋅⋅ αβ ↔ amarIsengm C ⋅=⋅−⋅⋅ 2β
Para una esfera, el momento de inercia con respecto al centro es:
2
52 RmIC ⋅⋅=
Sustituyendo esta expresión en la ecuación anterior, se obtiene finalmente el valor de a:
+
⋅=2
521
1
rR
senga β
El cálculo de FR se obtiene de forma similar partiendo de la ecuación (1), pero en este caso sustituyendo la magnitud global FRT por su expresión equivalente en función de la componente:
amFsengm R ⋅=−⋅⋅ 2β
Haciendo uso de nuevo de (2) y (3), se llega a una expresión en la que sólo hay que despejar FR:
αβ ⋅⋅=−⋅⋅ rmFsengm R2 ↔ C
RR I
rFrmFsengm ⋅⋅⋅=−⋅⋅ 22β
2
2
25
+
⋅⋅⋅=
rR
rR
sengmFR β

Capítulo 3: Diseño Conceptual 19
La última incógnita que queda por resolverse es N, para lo cual se parte de la ecuación originada del equilibrio de fuerzas en la dirección perpendicular a la superficie:
βθ coscos2 ⋅⋅=⋅ gmN ↔ θ
βcos21cos ⋅⋅⋅= gmN
⋅⋅⋅=
rRgmN
21cos β
Como se observa, todas las magnitudes se han expresado en función de la relación de radios R/r, además de depender del ángulo de inclinación β. Ahora se pretende averiguar el ángulo máximo que se puede inclinar la viga para que la bola ruede sin deslizar en su recorrido. Cuando ocurre esto, no se produce movimiento relativo en el punto de contacto, y por tanto se da fricción estática, tomando un valor entre 0 y su máximo, es decir
NF eR ⋅≤ µ
Sustituyendo valores en esta condición, se calcula la desigualdad que obtiene el ángulo máximo de inclinación:
⋅⋅⋅⋅≤
+
⋅⋅⋅rRgm
rR
rR
sengm e 21cos
252
2
βµβ
2
2
25
+
⋅≤
rR
rR
tg eµβ
De nuevo se obtiene una expresión que depende de la relación entre radios (es función del ángulo geométrico θ), y en este caso también del coeficiente de rozamiento estático, y por tanto, del tipo de material que elijamos tanto para la viga como para la esfera. Así por tanto, para diferentes valores de θ, averiguamos el ángulo máximo que puede girar la barra para que la bola ruede y no deslice para diferentes combinaciones de materiales en la bola.
Capítulo 3: Diseño Conceptual 20
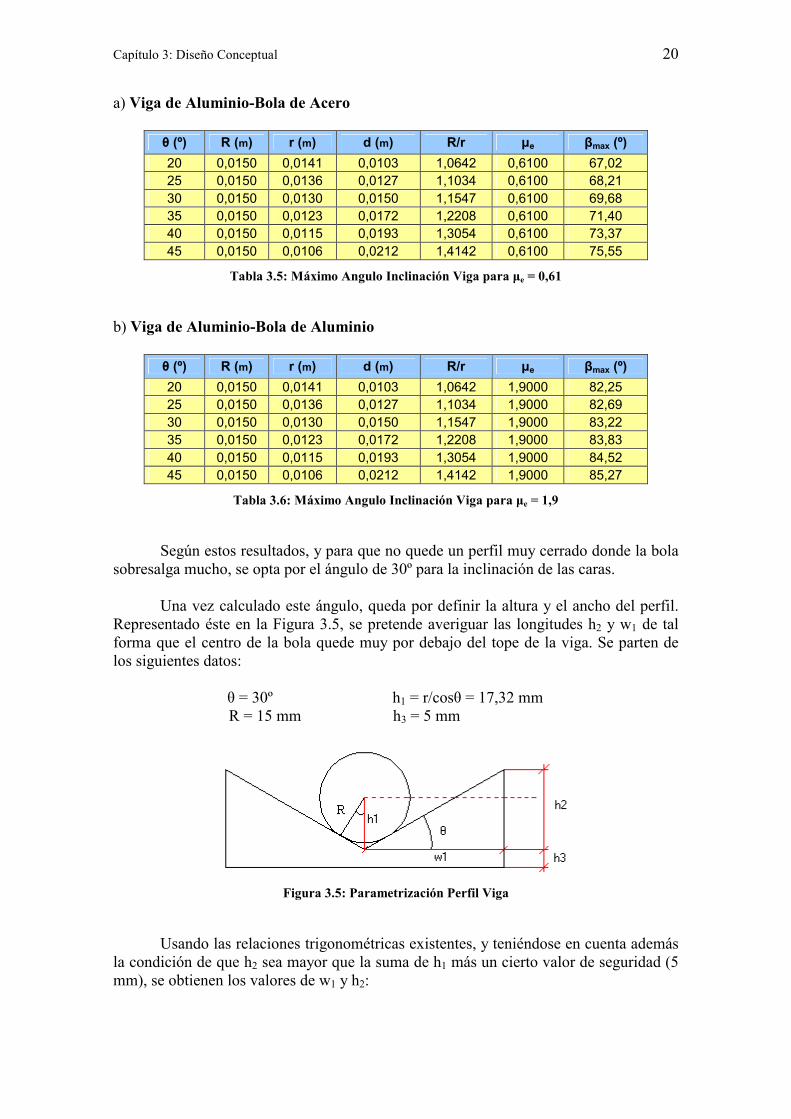
a) Viga de Aluminio-Bola de Acero
θ (º) R (m) r (m) d (m) R/r µe βmax (º) 20 0,0150 0,0141 0,0103 1,0642 0,6100 67,02 25 0,0150 0,0136 0,0127 1,1034 0,6100 68,21 30 0,0150 0,0130 0,0150 1,1547 0,6100 69,68 35 0,0150 0,0123 0,0172 1,2208 0,6100 71,40 40 0,0150 0,0115 0,0193 1,3054 0,6100 73,37 45 0,0150 0,0106 0,0212 1,4142 0,6100 75,55
Tabla 3.5: Máximo Angulo Inclinación Viga para µe = 0,61
b) Viga de Aluminio-Bola de Aluminio
θ (º) R (m) r (m) d (m) R/r µe βmax (º) 20 0,0150 0,0141 0,0103 1,0642 1,9000 82,25 25 0,0150 0,0136 0,0127 1,1034 1,9000 82,69 30 0,0150 0,0130 0,0150 1,1547 1,9000 83,22 35 0,0150 0,0123 0,0172 1,2208 1,9000 83,83 40 0,0150 0,0115 0,0193 1,3054 1,9000 84,52 45 0,0150 0,0106 0,0212 1,4142 1,9000 85,27
Tabla 3.6: Máximo Angulo Inclinación Viga para µe = 1,9
Según estos resultados, y para que no quede un perfil muy cerrado donde la bola sobresalga mucho, se opta por el ángulo de 30º para la inclinación de las caras.
Una vez calculado este ángulo, queda por definir la altura y el ancho del perfil. Representado éste en la Figura 3.5, se pretende averiguar las longitudes h2 y w1 de tal forma que el centro de la bola quede muy por debajo del tope de la viga. Se parten de los siguientes datos:
θ = 30º h1 = r/cosθ = 17,32 mm R = 15 mm h3 = 5 mm
Figura 3.5: Parametrización Perfil Viga
Usando las relaciones trigonométricas existentes, y teniéndose en cuenta además la condición de que h2 sea mayor que la suma de h1 más un cierto valor de seguridad (5 mm), se obtienen los valores de w1 y h2:
Capítulo 3: Diseño Conceptual 21
512 +> hh ↔ 5cos1 +>⋅
θθ Rtgw
θθ cos51 +>⋅ Rsenw ↔ mmw 66,381 >
mmw 401 =
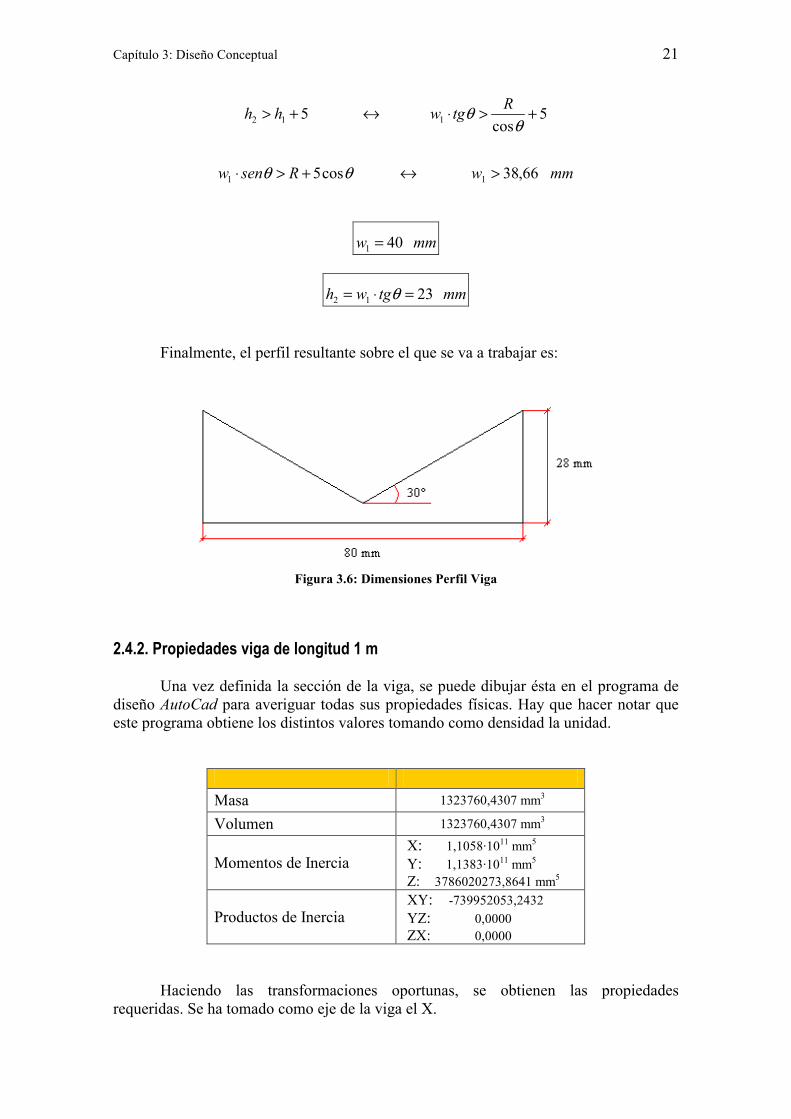
mmtgwh 2312 =⋅= θ Finalmente, el perfil resultante sobre el que se va a trabajar es:
Figura 3.6: Dimensiones Perfil Viga
2.4.2. Propiedades viga de longitud 1 m Una vez definida la sección de la viga, se puede dibujar ésta en el programa de diseño AutoCad para averiguar todas sus propiedades físicas. Hay que hacer notar que este programa obtiene los distintos valores tomando como densidad la unidad.
Masa 1323760,4307 mm3
Volumen 1323760,4307 mm3
Momentos de Inercia X: 1,1058·1011 mm5 Y: 1,1383·1011 mm5 Z: 3786020273,8641 mm5
Productos de Inercia XY: -739952053,2432 YZ: 0,0000 ZX: 0,0000
Haciendo las transformaciones oportunas, se obtienen las propiedades requeridas. Se ha tomado como eje de la viga el X.

Capítulo 3: Diseño Conceptual 22
kgmmmmm
mkgVM 87,3
1014307,13237602920 39
33
3 =⋅⋅=⋅= ρ
213515
5511 1023,32920
101101058,1 mkg
mkg
mmmmmIbarra ⋅⋅=⋅⋅⋅= −
Densidad (ρ) 2920 kg/m3 Masa (M=ρ·V) 3,87 kg Momento de Inercia respecto a eje motor (Ibarra)
3,23·10-1 kg·m2
Tabla 3.7: Características Viga de Longitud 1 m
2.4.3. Propiedades viga de longitud 1,20 m De igual forma se obtienen las propiedades para la viga de longitud 1,20 metros.
Masa 1588512,5168 mm3
Volumen 1588512,5168 mm3
Momentos de Inercia X: 1,9095·1011 mm5 Y: 1,9484·1011 mm5 Z: 4543224328,6369 mm5
Productos de Inercia XY: -887942463,8919 YZ: 0,0000 ZX: 0,0000
Densidad (ρ) 2920 kg/m3 Masa (M=ρ·V) 4,64 kg Momento de Inercia respecto a eje motor (Ibarra)
5,58·10-1 kg·m2
Tabla 3.8: Características Viga de Longitud 1,20 m
Se puede comprobar que un 16 % más de masa que introduce esta longitud supone aproximadamente un 42 % más de momento de inercia respecto al eje del motor, lo que supone un aumento bastante considerable.
Capítulo 3: Diseño Conceptual 23
3. Modelo Matemático Para diseñar y desarrollar con éxito un controlador que gobierne un mecanismo de forma satisfactoria, es conveniente disponer en la medida de lo posible de un modelo matemático que reproduzca fielmente el comportamiento del sistema. Esto facilitará en tiempo y precisión su controlabilidad al usarse técnicas más sencillas y fiables, y por otro lado hará que el sistema se estabilice sin complicaciones. Un modelo matemático de un sistema dinámico se puede definir como el conjunto de ecuaciones, generalmente diferenciales, que representan la dinámica del sistema en cuestión con bastante precisión. Este modelo matemático no será único, sino que dependiendo del sistema del que se trate y de las circunstancias específicas, un modelo será más conveniente que otros. Así por ejemplo, en problemas de control óptimo, es provechoso usar representaciones en el espacio de estados. En cambio, para los análisis de la respuesta transitoria o en frecuencia de sistemas lineales con una entrada y una salida invariantes con el tiempo, la representación mediante función de transferencia puede ser más conveniente que cualquier otra. En la obtención de un modelo matemático se debe establecer un equilibrio entre la simplicidad del mismo y la precisión de los resultados del análisis. Para obtener el modelo matemático del sistema de estudio Ball & Beam, se necesita definir en primer lugar el número de grados de libertad que posee dicho mecanismo. Como ya se ha comentado anteriormente, éste tiene dos grados de libertad, que se nombrarán del siguiente modo:
• Posición de la bola a lo largo de la barra -------------- q1 (m) • Ángulo de la viga respecto a la horizontal ------------ q2 (radianes)
En función de estas dos variables se obtendrán las ecuaciones de movimiento que gobernarán el sistema. Para que éstas resulten más simples y fáciles de usar, se tienen en cuenta una serie de posibles simplificaciones:
• El eje de giro del motor y la línea de avance del centro de la esfera, además de ser perpendiculares entre sí, se cortan ⇒⇒⇒⇒ con esto se evita la aparición de términos cuadráticos en las ecuaciones no actuadas de control ⇒⇒⇒⇒ se va a tener en cuenta en el diseño mecánico
• Centro de masas de la viga contenido en el eje de giro del motor ⇒⇒⇒⇒ con
esto se consigue que la energía potencial del sistema sin bola sea independiente del ángulo de giro ⇒⇒⇒⇒ no se va a tener en cuenta en el diseño mecánico, ya que los efectos que produce no usar esta simplificación en las ecuaciones actuadas de control pueden ser cancelados directamente ⇒⇒⇒⇒ consideramos r la distancia perpendicular que hay desde el eje de la viga al eje del motor
Capítulo 3: Diseño Conceptual 24
3.1. Modelo matemático del conjunto barra-esfera
Se pretende obtener las ecuaciones dinámicas de movimiento del sistema formado por la bola y la viga. Se hace primeramente empleando la formulación lagrangiana, y a partir de ésta, representarlas en ecuaciones de estado para su posterior uso en simulación y control. 3.1.1. Formulación lagrangiana La elección de la formulación lagrangiana para desarrollar las ecuaciones de movimiento se fundamenta en las ventajas que introduce ésta frente a las ecuaciones de Newton. Por definición, la lagrangiana de un sistema es la diferencia entre las energías cinética y potencial, siendo por tanto un escalar. Así, mientras que con el procedimiento de Newton se coloca el énfasis sobre el agente exterior que actúa sobre el cuerpo (la fuerza), con el de Lagrange se manejan magnitudes asociadas al cuerpo (energías cinética y potencial). Este hecho es especialmente importante por diversos motivos. En primer lugar, hace que la lagrangiana de un sistema sea invariante ante los cambios de coordenadas. Esto permite pasar del espacio ordinario (en el que las ecuaciones de movimiento pueden ser muy complicadas) a un espacio de configuraciones elegido de tal forma que de una simplificación máxima. En segundo lugar, no es necesario establecer de forma explícita las fuerzas que actúan sobre el cuerpo, cosa que a veces ni siquiera es posible.
La formulación lagrangiana de la Mecánica se desarrolla partiendo de dos
principios: el Principio de Definición de la Masa y el Principio de los Desplazamientos Virtuales, obteniéndose finalmente las siguientes ecuaciones:
FqL
q
Ldtd
ii
i
=∂
∂+∂∂−
∂
∂••
donde: qi es cada una de las coordenadas generalizadas L = T-V es la lagrangiana, siendo T la energía cinética y V la potencial F es la fuerza de disipación de Rayleigh Q es la fuerza generalizada
A continuación se obtienen estas ecuaciones para cada una de las coordenadas que se definen en el sistema Ball & Beam: q1 y q2. En primer lugar se calcula la energía cinética total del sistema, la cual estará compuesta por la energía cinética de la viga completa más la de la bola:
bolaviga TTT +=

Capítulo 3: Diseño Conceptual 25
•
=== 22
2
21
21 qIITT vvvrotviga ω 22
21
21
bbbrottrasbola ImvTTT ω+=+=
Es necesario calcular las velocidades lineal y angular de la bola en función de las coordenadas generalizadas.
La velocidad lineal es:
22
2••
+= yxvb
donde:
21 cos qqx ⋅= | 22121 cos senqqqqqx ⋅−⋅=•••
21 senqqy ⋅= | 22121 cos qqqsenqqy ⋅+⋅=•••
++⋅−+=•••••
222
12221122
2
2212
22
12 cos2cos qsenqqsenqqqqqsenqqqqvb
2
221
2
12221122
2
221 cos2cos
•••••+=⋅+ qqqsenqqqqqqqq
Y la velocidad angular de la bola se calcula como:
Rqb
•= 1ω
Sustituyendo estas expresiones en la ecuación de la energía cinética de la bola se obtiene:
222
1212
2
221
21 2
121
21
21
21
21
bbvbvb
bola IIqmqRIqmqqmT ωω ++=++=
••••
siendo 2
1mqI bv = el Momento de Inercia de la bola respecto al eje de la viga. De esta forma, sumando ambas expresiones de T, se obtiene la energía cinética
total del sistema:
••••
+++= 212
2
221
21
22 2
121
21
21 q
RIqmqqmqIT b
v
De forma similar se calcula la energía potencial de la viga, tomándose como referencia la viga en posición horizontal:
Capítulo 3: Diseño Conceptual 26
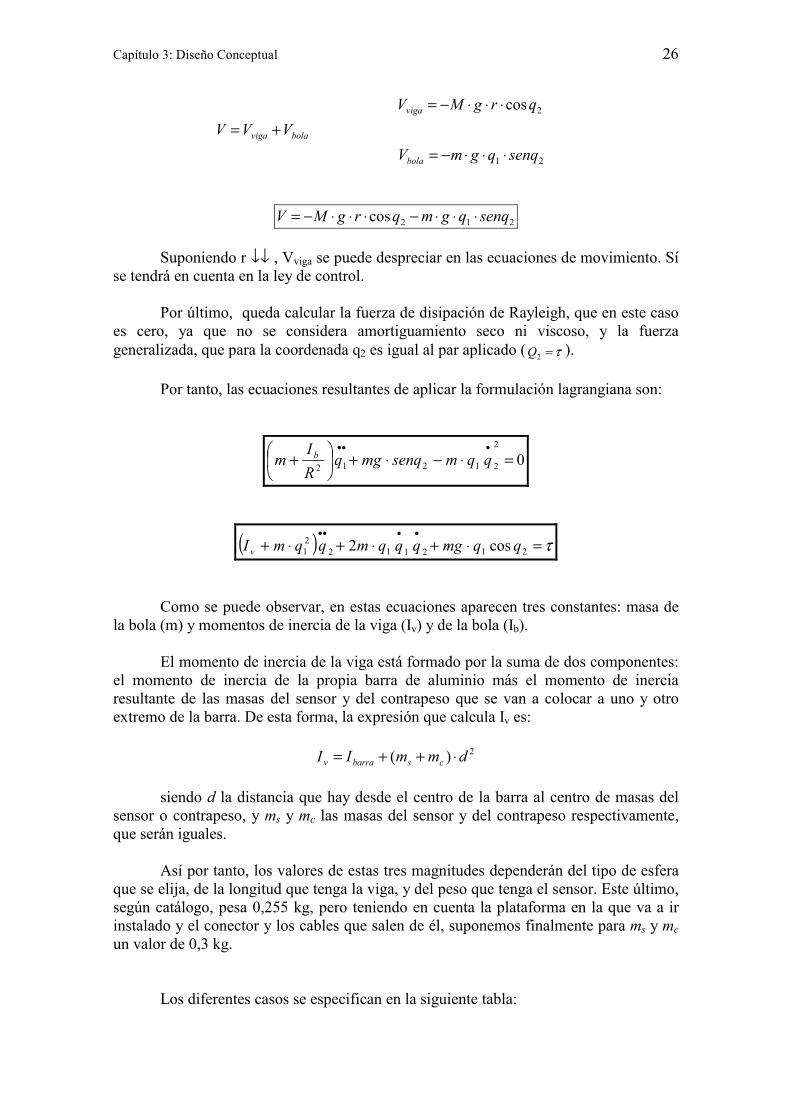
2cosqrgMVviga ⋅⋅⋅−= bolaviga VVV += 21 senqqgmVbola ⋅⋅⋅−=
212cos senqqgmqrgMV ⋅⋅⋅−⋅⋅⋅−=
Suponiendo r ↓↓ , Vviga se puede despreciar en las ecuaciones de movimiento. Sí se tendrá en cuenta en la ley de control.
Por último, queda calcular la fuerza de disipación de Rayleigh, que en este caso es cero, ya que no se considera amortiguamiento seco ni viscoso, y la fuerza generalizada, que para la coordenada q2 es igual al par aplicado ( τ=2Q ).
Por tanto, las ecuaciones resultantes de aplicar la formulación lagrangiana son:
02
21212 =⋅−⋅+
+•••qqmsenqmgq
RI
m b
( ) τ=⋅+⋅+⋅+••••
21211221 cos2 qqmgqqqmqqmI v
Como se puede observar, en estas ecuaciones aparecen tres constantes: masa de la bola (m) y momentos de inercia de la viga (Iv) y de la bola (Ib).
El momento de inercia de la viga está formado por la suma de dos componentes:
el momento de inercia de la propia barra de aluminio más el momento de inercia resultante de las masas del sensor y del contrapeso que se van a colocar a uno y otro extremo de la barra. De esta forma, la expresión que calcula Iv es:
2)( dmmII csbarrav ⋅++=
siendo d la distancia que hay desde el centro de la barra al centro de masas del sensor o contrapeso, y ms y mc las masas del sensor y del contrapeso respectivamente, que serán iguales.
Así por tanto, los valores de estas tres magnitudes dependerán del tipo de esfera que se elija, de la longitud que tenga la viga, y del peso que tenga el sensor. Este último, según catálogo, pesa 0,255 kg, pero teniendo en cuenta la plataforma en la que va a ir instalado y el conector y los cables que salen de él, suponemos finalmente para ms y mc un valor de 0,3 kg.
Los diferentes casos se especifican en la siguiente tabla:
Capítulo 3: Diseño Conceptual 27
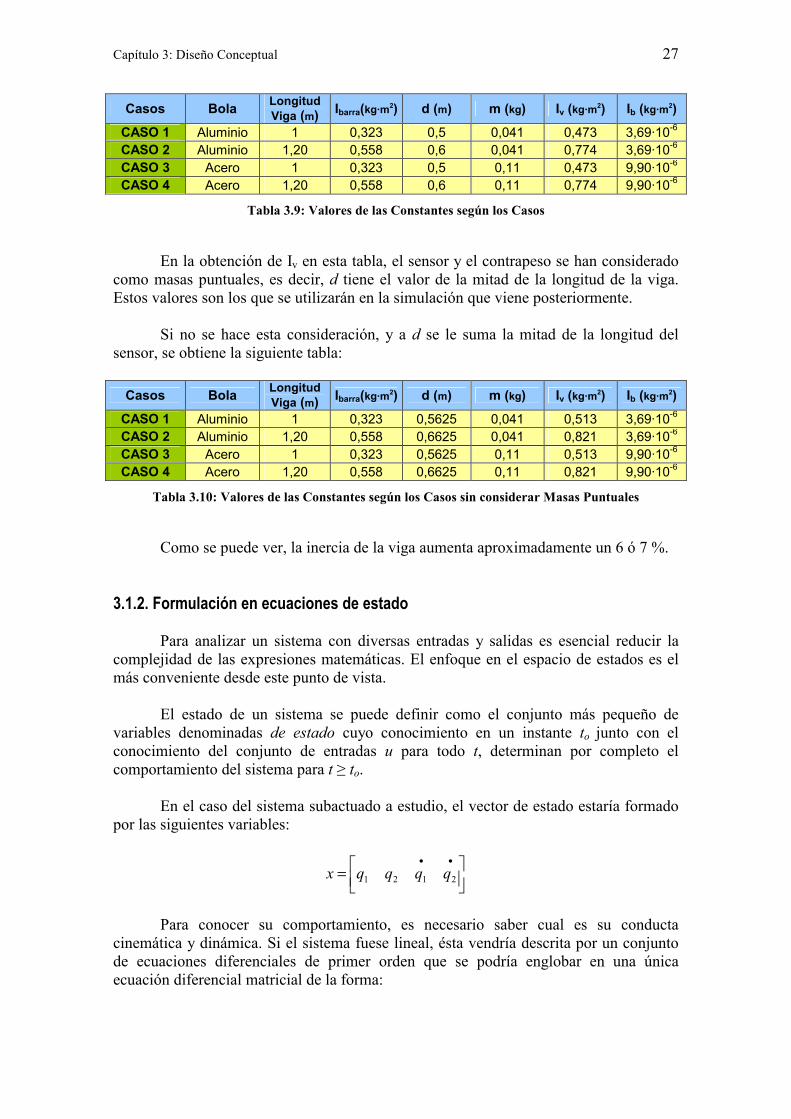
Casos Bola Longitud Viga (m) Ibarra(kg·m2) d (m) m (kg) Iv (kg·m2) Ib (kg·m2)
CASO 1 Aluminio 1 0,323 0,5 0,041 0,473 3,69·10-6 CASO 2 Aluminio 1,20 0,558 0,6 0,041 0,774 3,69·10-6
CASO 3 Acero 1 0,323 0,5 0,11 0,473 9,90·10-6 CASO 4 Acero 1,20 0,558 0,6 0,11 0,774 9,90·10-6
Tabla 3.9: Valores de las Constantes según los Casos
En la obtención de Iv en esta tabla, el sensor y el contrapeso se han considerado como masas puntuales, es decir, d tiene el valor de la mitad de la longitud de la viga. Estos valores son los que se utilizarán en la simulación que viene posteriormente. Si no se hace esta consideración, y a d se le suma la mitad de la longitud del sensor, se obtiene la siguiente tabla:
Casos Bola Longitud Viga (m) Ibarra(kg·m2) d (m) m (kg) Iv (kg·m2) Ib (kg·m2)
CASO 1 Aluminio 1 0,323 0,5625 0,041 0,513 3,69·10-6 CASO 2 Aluminio 1,20 0,558 0,6625 0,041 0,821 3,69·10-6
CASO 3 Acero 1 0,323 0,5625 0,11 0,513 9,90·10-6 CASO 4 Acero 1,20 0,558 0,6625 0,11 0,821 9,90·10-6
Tabla 3.10: Valores de las Constantes según los Casos sin considerar Masas Puntuales
Como se puede ver, la inercia de la viga aumenta aproximadamente un 6 ó 7 %. 3.1.2. Formulación en ecuaciones de estado
Para analizar un sistema con diversas entradas y salidas es esencial reducir la complejidad de las expresiones matemáticas. El enfoque en el espacio de estados es el más conveniente desde este punto de vista.
El estado de un sistema se puede definir como el conjunto más pequeño de
variables denominadas de estado cuyo conocimiento en un instante to junto con el conocimiento del conjunto de entradas u para todo t, determinan por completo el comportamiento del sistema para t ≥ to.
En el caso del sistema subactuado a estudio, el vector de estado estaría formado
por las siguientes variables:
=
••
2121 qqqqx
Para conocer su comportamiento, es necesario saber cual es su conducta
cinemática y dinámica. Si el sistema fuese lineal, ésta vendría descrita por un conjunto de ecuaciones diferenciales de primer orden que se podría englobar en una única ecuación diferencial matricial de la forma:
Capítulo 3: Diseño Conceptual 28
uBxAx ⋅+⋅=•
En cambio, como el sistema Ball & Beam presenta ecuaciones acopladas no lineales, esta relación deja de ser válida, pasando a estar indefinida matricialmente.
Para obtener las ecuaciones de estado, se parte de las dos ecuaciones calculadas
anteriormente mediante la formulación de Lagrange y se despejan las variables pertenecientes al vector derivada de x:
( ) 11••
= qx
( ) 22••
= qx
( )
⋅−⋅
+
==••••
2
2
21
2
13 senqgqq
RIm
mqxb
( ) ( )
⋅⋅⋅−⋅⋅⋅−
⋅+==
•••••
2121121
2 cos214 qqgmqqqmqmI
qxv
τ
3.2. Flexión de la viga
La flexión se puede definir como el fenómeno en virtud del cual un cuerpo sufre una deformación normal al esfuerzo al que se haya sometido, determinando ésta que parte del material trabaja a compresión y cual a tracción. El causante de esta deformación es la aplicación directa de cargas o pares sobre el cuerpo.
Por tanto, el estudio de este fenómeno es de vital importancia en el diseño y
análisis de cualquier mecanismo sometido a cargas. En concreto, se realiza el estudio de la deflexión o flecha producida, y que no es más que el desplazamiento causado en cualquier punto del cuerpo desde su posición de equilibrio debido a la acción de las fuerzas aplicadas.
En el caso concreto del sistema Ball & Beam, la flecha máxima que sufre la viga
se va a deber principalmente a dos cuestiones: en primer lugar, a la propia inercia que sufre la viga cuando es sometida a un par τ, y en segundo lugar, al peso de la masa colocada en un extremo.
pi vvv −− += maxmaxmax
Para ver la deflexión producida debida a la propia inercia, se considera un
diferencial de masa dm de la viga situado a una distancia x del CM. En esta circunstancia, la fuerza que actúa sobre dicho diferencial debido al par aplicado es:

Capítulo 3: Diseño Conceptual 29
)()( xadmxdF ⋅= (2ª ley de Newton)
La distribución de fuerzas se obtendrá integrando esta expresión en función de x,
para lo cual es necesario desarrollar previamente cada uno de sus términos:
• dm: depende del tipo de material
dxSdm ⋅⋅= ρ , siendo S el área de la sección
• a(x): depende de la aceleración angular. Esta relación se obtiene de la Figura 3.7:
Figura 3.7: Diferencial de Movimiento
xdds ⋅= θ → xdtd
dtds ⋅= θ → xxv ⋅= ω)( → xxa ⋅=
•ω)(
Se puede observar que conforme aumenta x, también aumenta a. De esta forma, en el extremo de la viga es donde se obtiene la máxima aceleración, y por tanto la máxima fuerza. Teniéndose en cuenta la relación entre el par aplicado y la aceleración angular, es posible obtener a en función de τ:
•⋅= ωτ vI
xI
xav
⋅
= τ)(
Utilizando ambas expresiones se obtiene la fuerza que actúa sobre el diferencial de masa:
dxxSI
xdFv
⋅⋅⋅⋅= ρτ)(
Capítulo 3: Diseño Conceptual 30
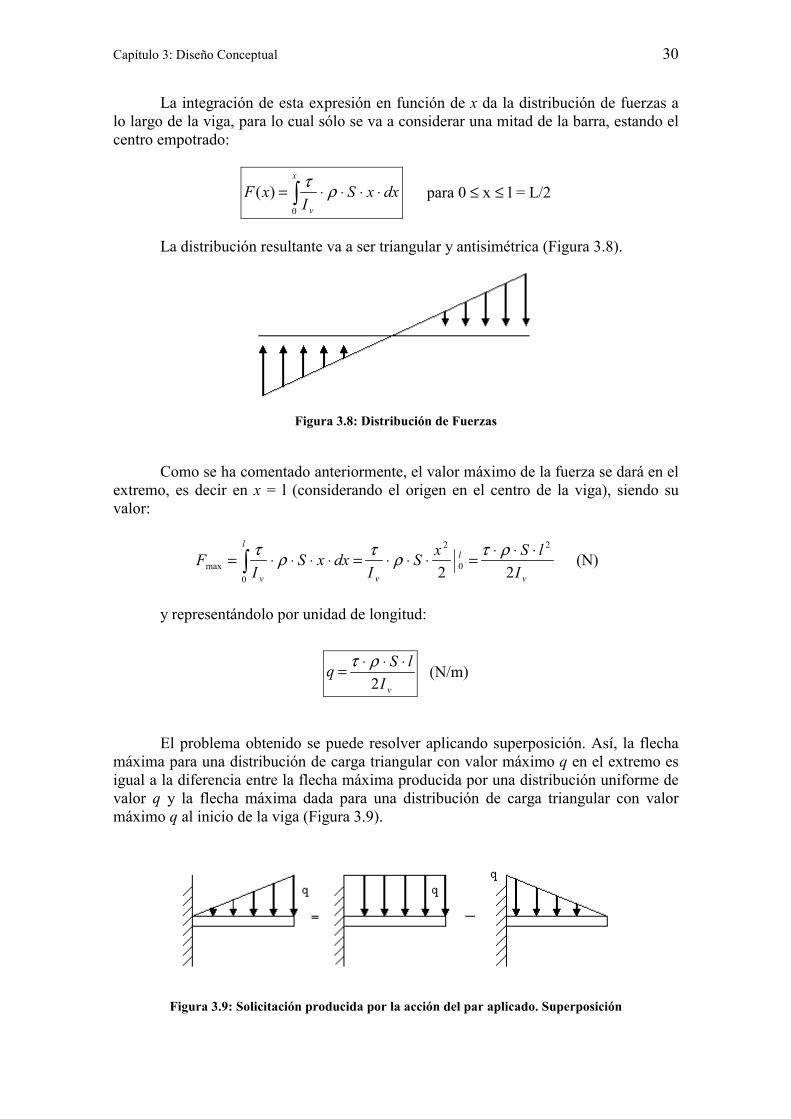
La integración de esta expresión en función de x da la distribución de fuerzas a lo largo de la viga, para lo cual sólo se va a considerar una mitad de la barra, estando el centro empotrado:
∫ ⋅⋅⋅⋅=x
v
dxxSI
xF0
)( ρτ para 0 ≤ x ≤ l = L/2
La distribución resultante va a ser triangular y antisimétrica (Figura 3.8).
Figura 3.8: Distribución de Fuerzas
Como se ha comentado anteriormente, el valor máximo de la fuerza se dará en el
extremo, es decir en x = l (considerando el origen en el centro de la viga), siendo su valor:
v
l
v
l
v IlSxS
IdxxS
IF
22
2
0
2
0max
⋅⋅⋅=⋅⋅⋅=⋅⋅⋅⋅= ∫ρτρτρτ (N)
y representándolo por unidad de longitud:
vIlSq
2⋅⋅⋅= ρτ
(N/m)
El problema obtenido se puede resolver aplicando superposición. Así, la flecha máxima para una distribución de carga triangular con valor máximo q en el extremo es igual a la diferencia entre la flecha máxima producida por una distribución uniforme de valor q y la flecha máxima dada para una distribución de carga triangular con valor máximo q al inicio de la viga (Figura 3.9).
Figura 3.9: Solicitación producida por la acción del par aplicado. Superposición
Capítulo 3: Diseño Conceptual 31
Utilizando el prontuario de esfuerzos y momentos según distintas solicitaciones (Anexo A.1), se obtienen las expresiones de estas flechas máximas:
τρρτEII
lSEII
lSEI
lqEIlq
EIlqv
vvi
55444
max 24011
212011
12011
308⋅⋅=⋅⋅⋅=⋅=⋅−⋅=−
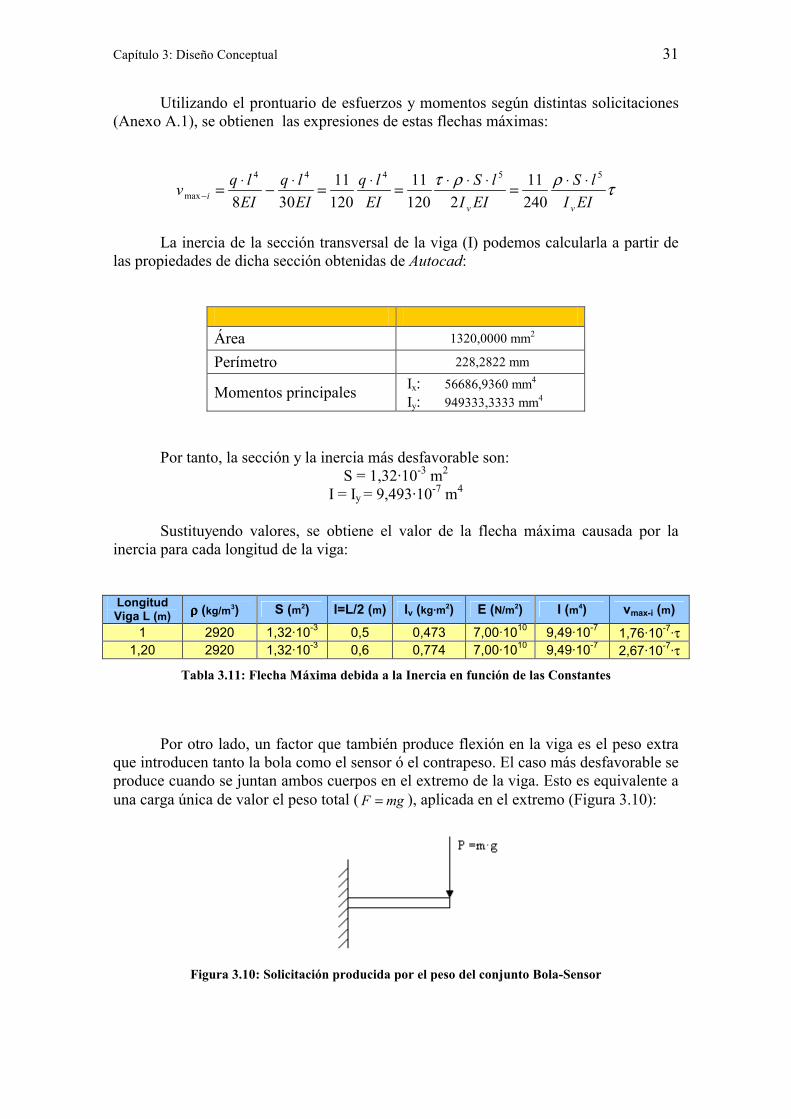
La inercia de la sección transversal de la viga (I) podemos calcularla a partir de las propiedades de dicha sección obtenidas de Autocad:
Área 1320,0000 mm2
Perímetro 228,2822 mm
Momentos principales Ix: 56686,9360 mm4 Iy: 949333,3333 mm4
Por tanto, la sección y la inercia más desfavorable son: S = 1,32·10-3 m2
I = Iy = 9,493·10-7 m4
Sustituyendo valores, se obtiene el valor de la flecha máxima causada por la inercia para cada longitud de la viga: Longitud Viga L (m) ρρρρ (kg/m3) S (m2) l=L/2 (m) Iv (kg·m2) E (N/m2) I (m4) vmax-i (m)
1 2920 1,32·10-3 0,5 0,473 7,00·1010 9,49·10-7 1,76·10-7·τ 1,20 2920 1,32·10-3 0,6 0,774 7,00·1010 9,49·10-7 2,67·10-7·τ
Tabla 3.11: Flecha Máxima debida a la Inercia en función de las Constantes
Por otro lado, un factor que también produce flexión en la viga es el peso extra que introducen tanto la bola como el sensor ó el contrapeso. El caso más desfavorable se produce cuando se juntan ambos cuerpos en el extremo de la viga. Esto es equivalente a una carga única de valor el peso total ( mgF = ), aplicada en el extremo (Figura 3.10):
Figura 3.10: Solicitación producida por el peso del conjunto Bola-Sensor
Capítulo 3: Diseño Conceptual 32
Al igual que en el caso anterior, la expresión de la flecha máxima debida al peso en el extremo se obtiene del prontuario (Anexo A.1):
EIlmg
EIlFv p 33
33
max⋅=⋅=−
Se sustituyen valores para los diferentes casos ya definidos:
Casos Bola Longitud
Viga (m) m (kg) l=L/2 (m) E (N/m2) I (m4) vmax-p (m) CASO 1 Aluminio 1 0,341 0,5 7,00·1010 9,49·10-7 2,10·10-6 CASO 2 Aluminio 1,20 0,341 0,6 7,00·1010 9,49·10-7 3,62·10-6 CASO 3 Acero 1 0,41 0,5 7,00·1010 9,49·10-7 2,52·10-6 CASO 4 Acero 1,20 0,41 0,6 7,00·1010 9,49·10-7 4,35·10-6
Tabla 3.12: Flecha Máxima debida al Peso en función de las Constantes
La flecha máxima total que sufre la viga se calcula sumando ambos valores para los diferentes casos:
Casos Bola Longitud Viga (m) vmax (m)
CASO 1 Aluminio 1 2,10·10-6+1,76·10-7·τ CASO 2 Aluminio 1,20 3,62·10-6+2,67·10-7·τ CASO 3 Acero 1 2,52·10-6+1,76·10-7·τ CASO 4 Acero 1,20 4,35·10-6+2,67·10-7·τ
Tabla 3.13: Flecha Máxima Total en la Viga
Capítulo 3: Diseño Conceptual 33
B.
Simulación
Capítulo 3: Diseño Conceptual 34
1. Desarrollo Tras la propuesta de varias soluciones a nuestro sistema mecánico, se lleva a cabo una evaluación de las mismas para elegir que caso de los planteados es el más idóneo a los requerimientos. Tras definirse en un primer diseño que la viga fuese mecanizada completamente a partir de un bloque de aluminio y que la sección de la misma tuviera un ángulo de 30º, las diferencias surgen a la hora de elegir la longitud de la viga y el tipo de material de la bola. Los diferentes casos, que afectan tanto al modelo del sistema como a la flexión producida, se resumen en el siguiente cuadro:
Casos Bola Longitud Viga (m)
CASO 1 Aluminio 1 CASO 2 Aluminio 1,20 CASO 3 Acero 1 CASO 4 Acero 1,20
El criterio de evaluación que se va a usar se basa en la obtención del par necesario a aplicar en cada uno de los casos para hacer frente a la carga dada por la bola y la viga en sus movimientos. Este par obtenido se comparará con el que proporciona el motor del que disponemos, debiendo ser menor. Para llevar a cabo tal evaluación se recurre a una simulación completa del sistema mecánico mediante las herramientas informáticas Matlab y Simulink, y en la que se verá la evolución temporal de cada una de las magnitudes asociadas. Así, fijada la posición a la que se quiere la bola (q1r), se pretende obtener a través de un esquema de control el ángulo de la viga requerido para tal fin (q2r) y el par que se debe aplicar (τ). Como ya se ha comentado, para controlar con ciertas garantías este sistema dinámico no lineal es necesario el uso de un esquema de control realimentado o feedback convencional. En algunas ocasiones, este esquema puede mejorarse notablemente mediante el empleo de un sistema de control denominado en cascada, que permite el diseño de lazos anidados para rechazar perturbaciones por realimentación provocadas por el retardo asociado al proceso de medición. Este nuevo esquema presenta las siguientes características:
• Tiene dos lazos de control: uno primario ó externo y el otro secundario ó interno.
• La señal de salida del controlador primario ó “maestro” será la entrada de
referencia del secundario ó “esclavo”.
• Es menos sensible a errores de modelado que el esquema feedback puro.
• Las perturbaciones en el lazo interno son corregidas por su propio controlador antes de que puedan afectar a la variable del lazo externo.

Capítulo 3: Diseño Conceptual 35
• Como el lazo secundario existe como un elemento del lazo primario, el controlador “esclavo” debe ajustarse apropiadamente antes que el “maestro”.
Trasladando estas características al sistema Ball & Beam, el bucle de control en cascada resultante estaría formado por un lazo primario ó externo que controlaría la posición de la bola, y por otro secundario ó interno encargado de controlar el ángulo de giro de la viga.
Figura 3.11: Control en Cascada
Como controlador, se utilizará un simple PD (Proporcional-Derivativo) para cada lazo. Este controlador, de alta sensibilidad, es capaz de dar respuesta a la velocidad de cambio del error y producir una corrección significativa antes de que la magnitud del error se vuelva demasiado grande, por lo que tiene carácter preventivo y efecto estabilizante (menor sobreoscilación). Presenta la desventaja importante que amplifica las señales de ruido y puede provocar saturación en el actuador. Para simular este esquema en Matlab y poder así obtener gráficamente los valores de q1, q2 y τ, es necesario adaptarlo a las características propias de Simulink, obteniéndose finalmente una estructura como la representada en la Figura 3.12. La evolución temporal de las señales se realiza mediante la introducción de un reloj.
Figura 3.12: Esquema de Control en Simulink
Capítulo 3: Diseño Conceptual 36
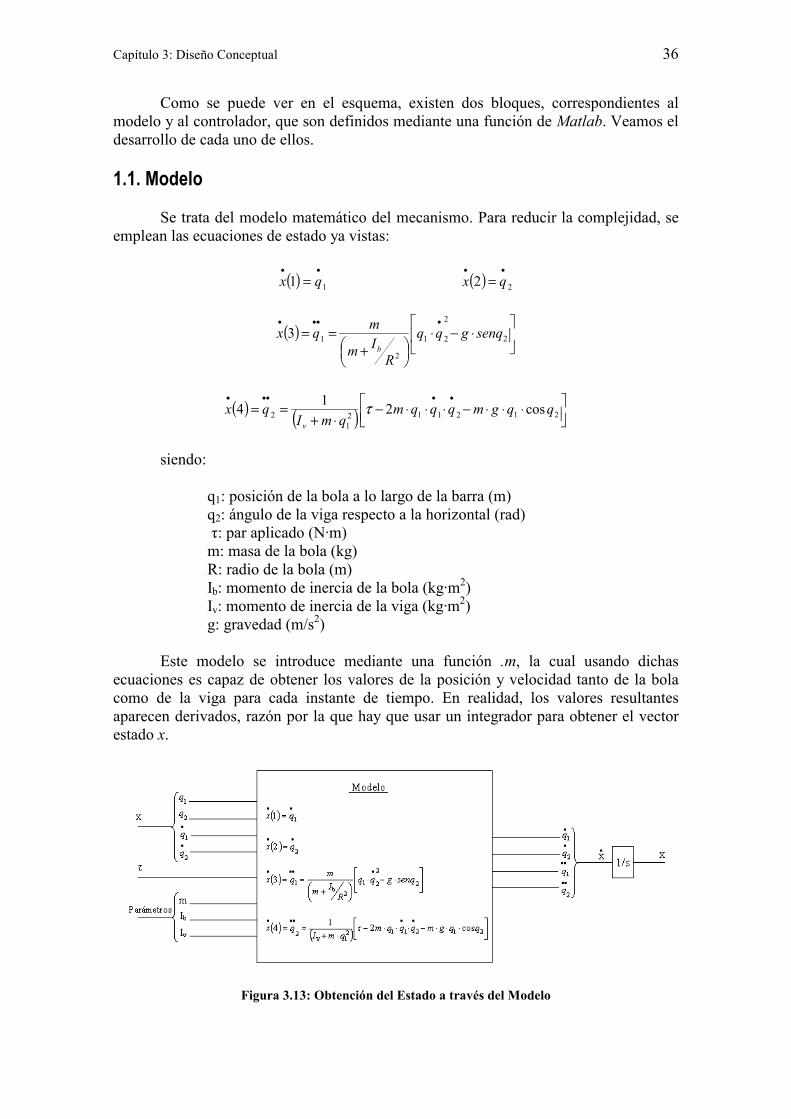
Como se puede ver en el esquema, existen dos bloques, correspondientes al modelo y al controlador, que son definidos mediante una función de Matlab. Veamos el desarrollo de cada uno de ellos. 1.1. Modelo Se trata del modelo matemático del mecanismo. Para reducir la complejidad, se emplean las ecuaciones de estado ya vistas:
( ) 11••
= qx ( ) 22••
= qx
( )
⋅−⋅
+
==••••
2
2
21
2
13 senqgqq
RIm
mqxb
( ) ( )
⋅⋅⋅−⋅⋅⋅−
⋅+==
•••••
2121121
2 cos214 qqgmqqqmqmI
qxv
τ
siendo:
q1: posición de la bola a lo largo de la barra (m) q2: ángulo de la viga respecto a la horizontal (rad) τ: par aplicado (N·m) m: masa de la bola (kg) R: radio de la bola (m) Ib: momento de inercia de la bola (kg·m2) Iv: momento de inercia de la viga (kg·m2) g: gravedad (m/s2) Este modelo se introduce mediante una función .m, la cual usando dichas ecuaciones es capaz de obtener los valores de la posición y velocidad tanto de la bola como de la viga para cada instante de tiempo. En realidad, los valores resultantes aparecen derivados, razón por la que hay que usar un integrador para obtener el vector estado x.
Figura 3.13: Obtención del Estado a través del Modelo

Capítulo 3: Diseño Conceptual 37
Este esquema se implementa en la función mediante el siguiente código: 1.2. Controlador El objetivo de esta función es averiguar los valores de salida de los controladores maestro y esclavo, es decir, las magnitudes q2r y τ. Si utilizamos la primera ecuación de movimiento y despreciamos los términos cuadráticos, llegamos a la siguiente relación:
02
21212 =⋅−⋅+
+•••qqmsenqmgq
RI
m b → 21 qgq ⋅−≈••
Teniéndose en cuenta que cualquier término derivativo de segundo orden se
puede expresar como la suma de un término proporcional y otro derivativo (control PD), se llega finalmente a obtener q2r en función de la referencia q1r:
•••⋅+⋅= eKeKq dp 111
( )
−+−−=
••
11111121 qqKqqKg
q rdrpr
Si se pretende fijar la posición de la bola en el centro de la viga (q1r = 0), la ecuación anterior queda del siguiente modo:
( )
−⋅+−⋅−=
•
111121 qKqKg
q dpr
function dx=modelo(u,param)
% Entradas q1=u(1); q2=u(2); dq1=u(3); dq2=u(4); tau=u(5); m=param(1); Ib=param(2); Iv=param(3);
% Ctes. R=0.015; g=9.8;
% Salidas (ecs. de estado) dx(1)=dq1; dx(2)=dq2; dx(3)=(m/(m+(Ib/(R^2))))*(q1*(dq2^2)-g*sin(q2)); dx(4)=(1/(Iv+m*(q1^2)))*(tau-2*m*q1*dq1*dq2-m*g*q1*cos(q2));

Capítulo 3: Diseño Conceptual 38
Por otro lado, la segunda ecuación de movimiento también se puede expresar mediante la siguiente relación:
( ) τ=⋅+⋅+⋅+••••
21211221 cos2 qqmgqqqmqqmI v
↓
21211 cos2 qqmgqqqmg ⋅+⋅+≈••
ττ
siendo:
2
••≈ qgτ
Al igual que antes, éste termino derivativo de segundo orden también se puede poner como suma de uno proporcional y otro derivativo, obteniéndose así el par producido al girar como función de la referencia q2r:
•••⋅+⋅= eKeKq dp 222
( )
−+−=
••
222222 qqKqqK rdrpgτ
Así pues, con estas ecuaciones en función de las constantes proporcionales y derivativas se obtienen los valores de q2r y τ a partir de la posición y la velocidad. Debido a que se necesita como entrada la derivada de q2r, se introduce un bloque derivativo y se realimenta.
Figura 3.14: Obtención de q2r y τ a través del Controlador
La función está compuesta del siguiente código:
Capítulo 3: Diseño Conceptual 39
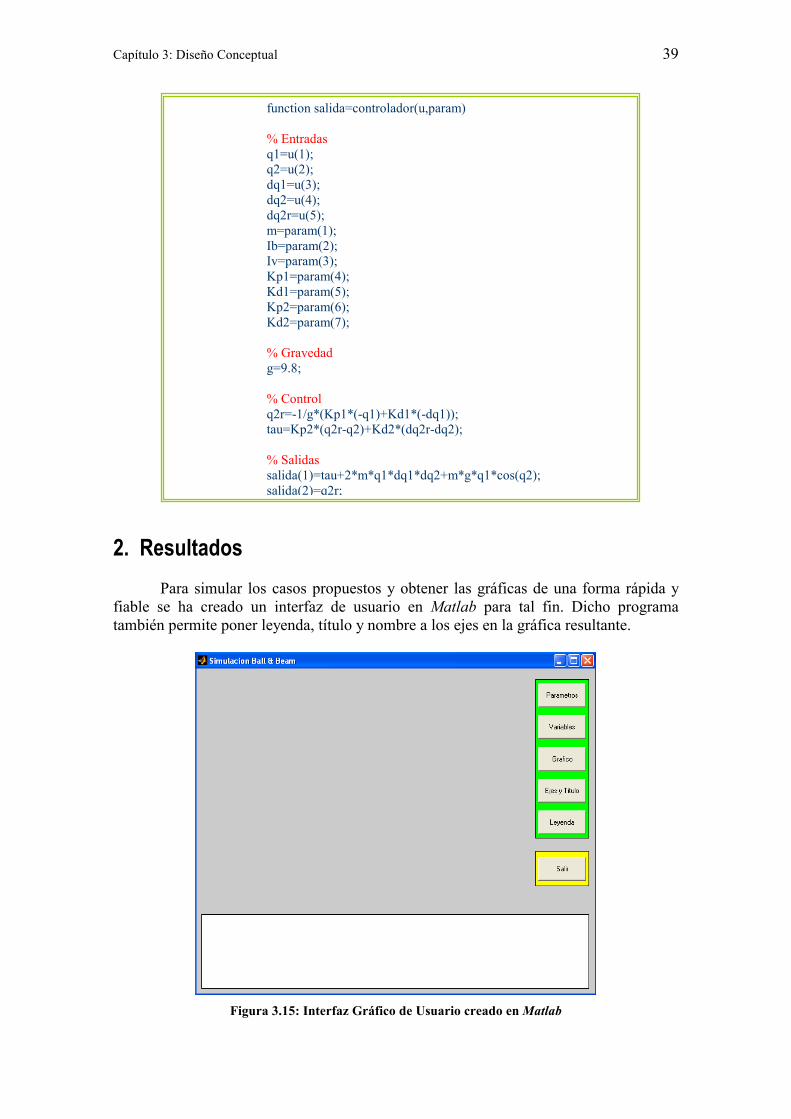
2. Resultados Para simular los casos propuestos y obtener las gráficas de una forma rápida y fiable se ha creado un interfaz de usuario en Matlab para tal fin. Dicho programa también permite poner leyenda, título y nombre a los ejes en la gráfica resultante.
Figura 3.15: Interfaz Gráfico de Usuario creado en Matlab
function salida=controlador(u,param)
% Entradas q1=u(1); q2=u(2); dq1=u(3); dq2=u(4); dq2r=u(5); m=param(1); Ib=param(2); Iv=param(3); Kp1=param(4); Kd1=param(5); Kp2=param(6); Kd2=param(7);
% Gravedad g=9.8;
% Control q2r=-1/g*(Kp1*(-q1)+Kd1*(-dq1)); tau=Kp2*(q2r-q2)+Kd2*(dq2r-dq2);
% Salidas salida(1)=tau+2*m*q1*dq1*dq2+m*g*q1*cos(q2); salida(2)=q2r;
Capítulo 3: Diseño Conceptual 40
De esta forma, dando valores adecuados a los parámetros que aparecen tanto en el modelo como en el controlador, y especificándose unas condiciones iniciales, se puede obtener la evolución temporal de las posiciones, velocidades y par que se dan en el mecanismo. Este software está formado por 13 ficheros .m y otro .mdl de Simulink, y su funcionamiento y código se explican en los Anexo A.2. y A.3. respectivamente.
Figura 3.16: Relación Parámetros-Variables en el Interfaz Gráfico
Como ya se ha mencionado, los diferentes casos a evaluar se diferencian en la longitud de la viga y en el tipo de material de la bola, cosa que afecta a los parámetros m, Ib e Iv. En cuanto al control, se necesita que la respuesta sobre la viga sea lo más rápida posible para evitar que la bola se salga de la barra antes de que el motor cambie su sentido de giro. Por esta razón, los parámetros asociados al lazo secundario serán mayores que los del lazo primario. Por último, y antes de obtener las distintas gráficas, indicar que se van a tomar en principio dos condiciones iniciales distintas para la simulación. La primera, y más favorable, sería la bola en posición estática a 0,5 metros del centro estando la viga girada un ángulo de 60º (1,0472 rad). La segunda sería igual que ésta pero estando la bola en la parte inferior de la viga a –0,5 metros, lo que hace más difícil su levantamiento.
q1 q2 dq1 dq2 C.I.(1) 0,5 1,0472 0 0
q1 q2 dq1 dq2 C.I.(2)
-0,5 1,0472 0 0
a) Caso 1: Bola de Aluminio y Viga de Longitud 1 m
m (kg) Ib (kg·m2) Iv (kg·m2) Mecanismo 0,041 3,69·10-6 0,473
kp1 kd1 kp2 kd2 Control (1) 0,5 0,2 10 4
Capítulo 3: Diseño Conceptual 41
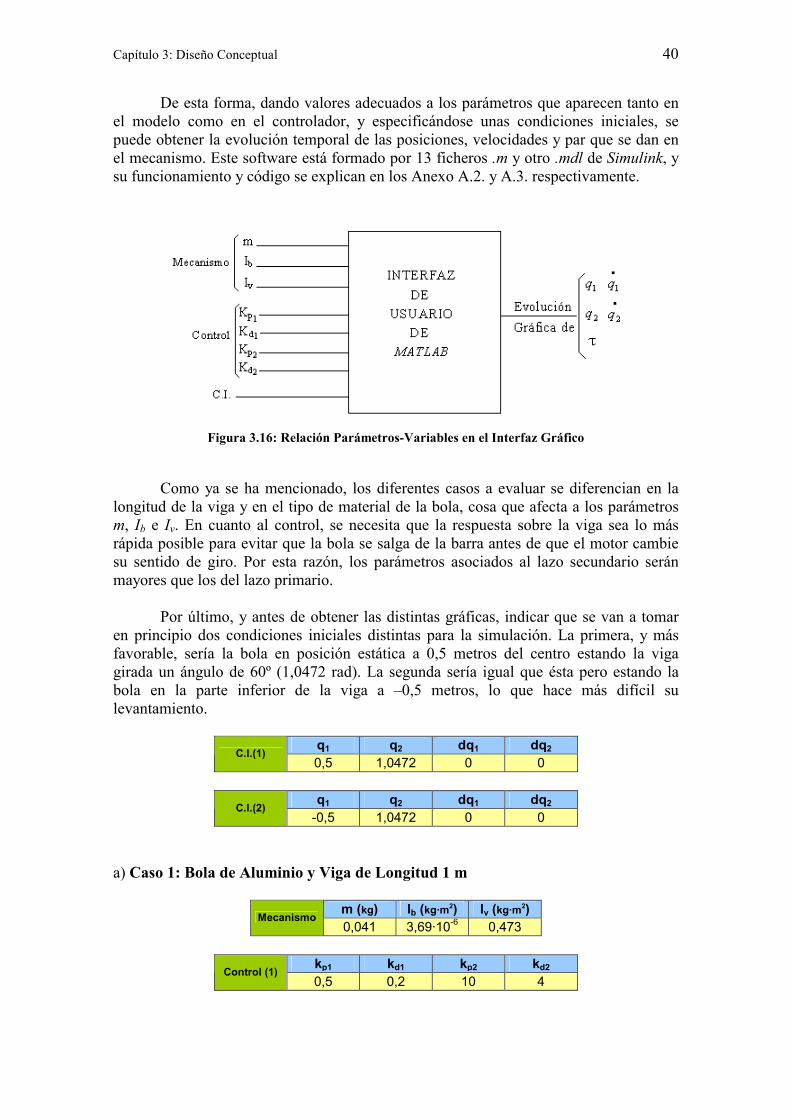
Si partimos de la C.I.(1), la gráfica resultante es:
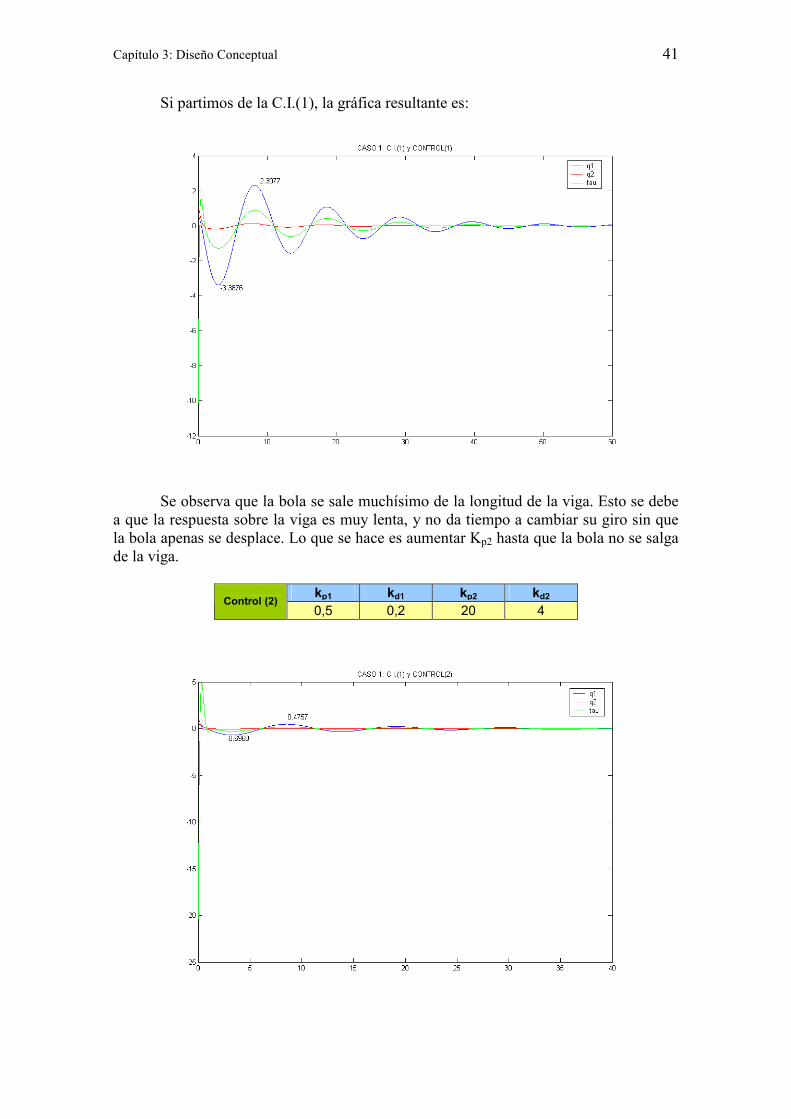
Se observa que la bola se sale muchísimo de la longitud de la viga. Esto se debe a que la respuesta sobre la viga es muy lenta, y no da tiempo a cambiar su giro sin que la bola apenas se desplace. Lo que se hace es aumentar Kp2 hasta que la bola no se salga de la viga.
kp1 kd1 kp2 kd2 Control (2) 0,5 0,2 20 4
Capítulo 3: Diseño Conceptual 42
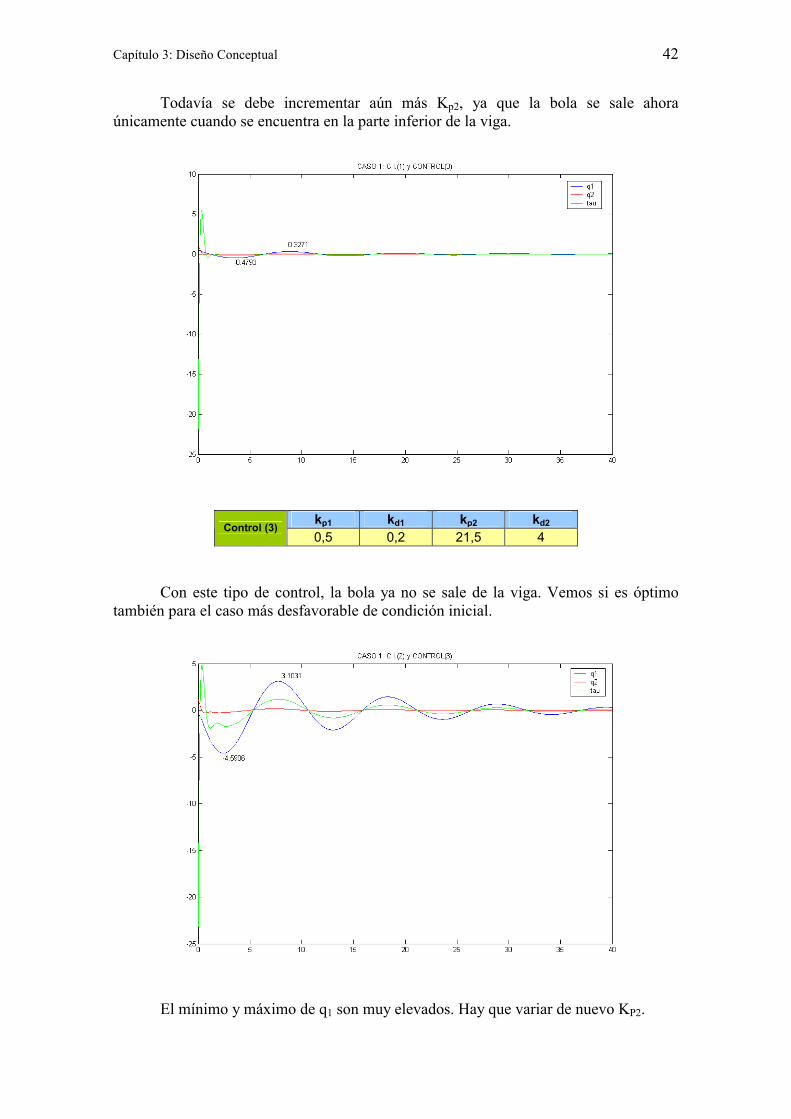
Todavía se debe incrementar aún más Kp2, ya que la bola se sale ahora únicamente cuando se encuentra en la parte inferior de la viga.
kp1 kd1 kp2 kd2 Control (3) 0,5 0,2 21,5 4
Con este tipo de control, la bola ya no se sale de la viga. Vemos si es óptimo también para el caso más desfavorable de condición inicial.
El mínimo y máximo de q1 son muy elevados. Hay que variar de nuevo KP2.
Capítulo 3: Diseño Conceptual 43
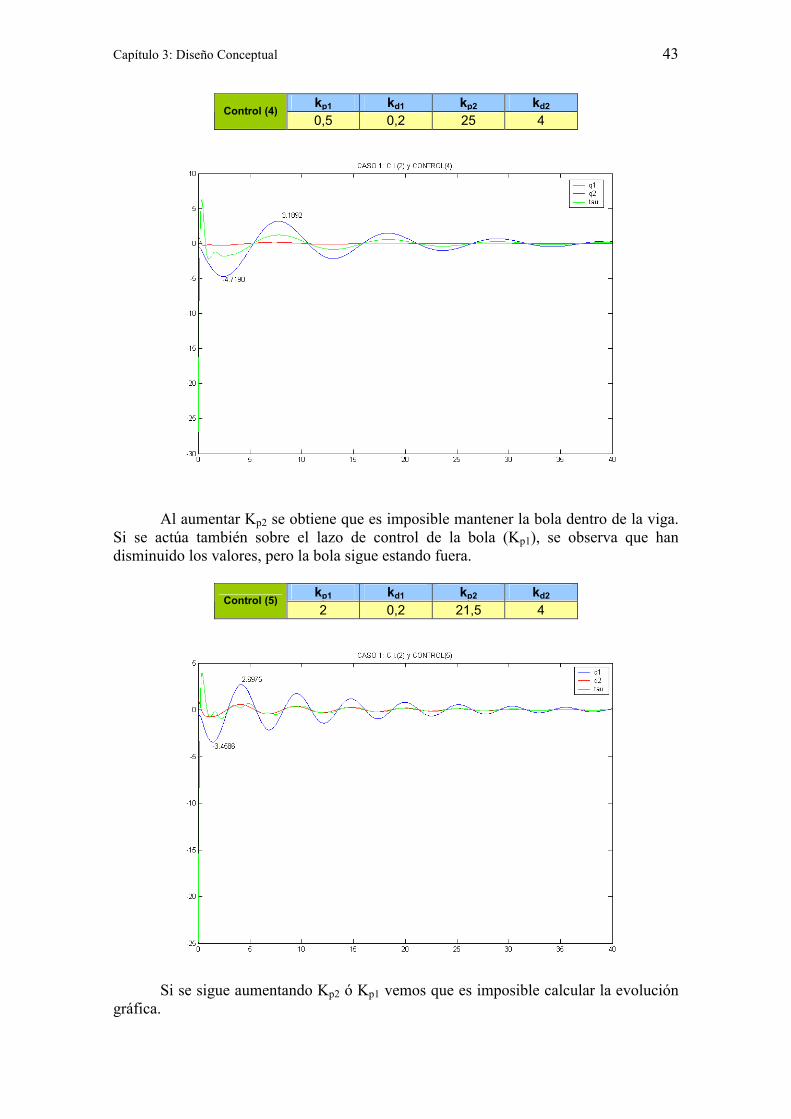
kp1 kd1 kp2 kd2 Control (4) 0,5 0,2 25 4
Al aumentar Kp2 se obtiene que es imposible mantener la bola dentro de la viga. Si se actúa también sobre el lazo de control de la bola (Kp1), se observa que han disminuido los valores, pero la bola sigue estando fuera.
kp1 kd1 kp2 kd2 Control (5) 2 0,2 21,5 4
Si se sigue aumentando Kp2 ó Kp1 vemos que es imposible calcular la evolución gráfica.
Capítulo 3: Diseño Conceptual 44
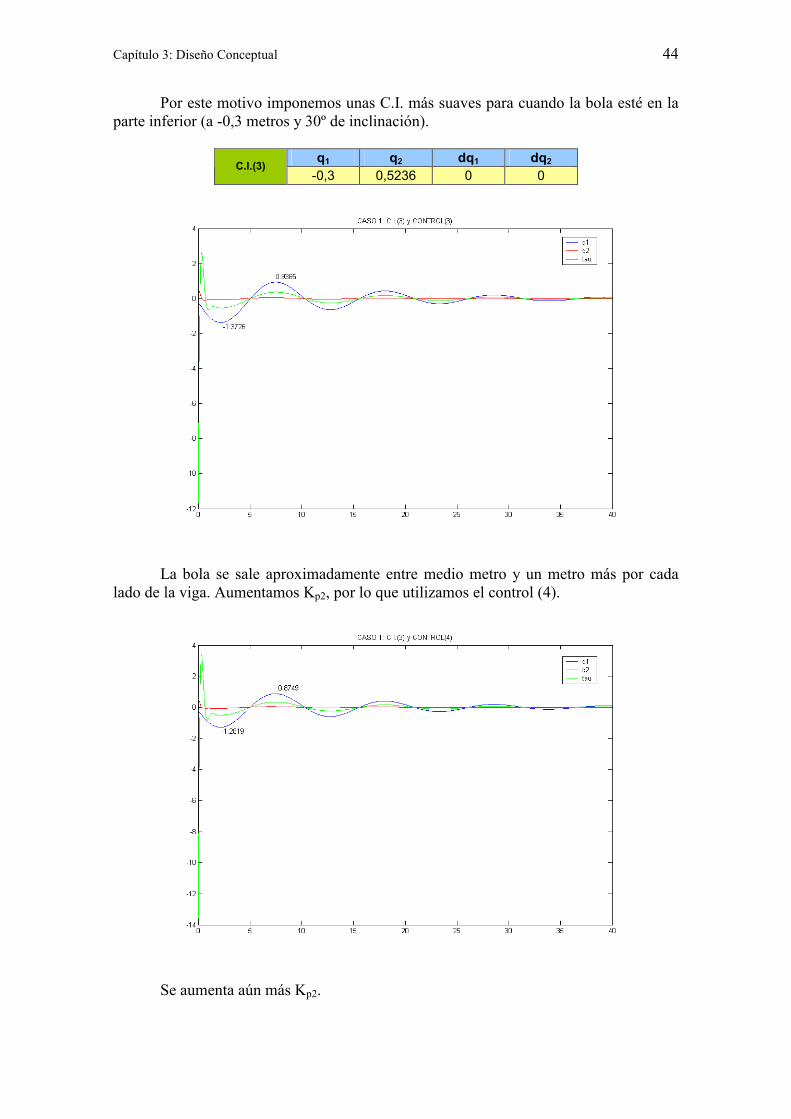
Por este motivo imponemos unas C.I. más suaves para cuando la bola esté en la parte inferior (a -0,3 metros y 30º de inclinación).
q1 q2 dq1 dq2 C.I.(3) -0,3 0,5236 0 0
La bola se sale aproximadamente entre medio metro y un metro más por cada lado de la viga. Aumentamos Kp2, por lo que utilizamos el control (4).
Se aumenta aún más Kp2.
Capítulo 3: Diseño Conceptual 45
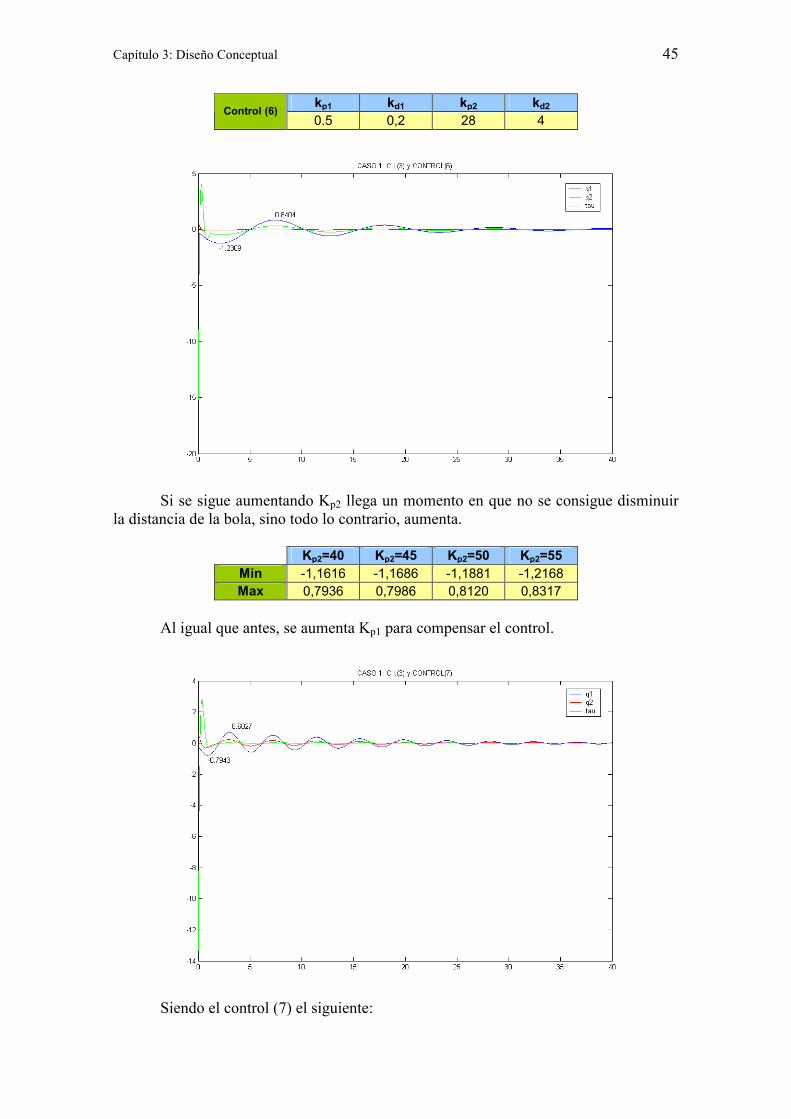
kp1 kd1 kp2 kd2 Control (6) 0.5 0,2 28 4
Si se sigue aumentando Kp2 llega un momento en que no se consigue disminuir la distancia de la bola, sino todo lo contrario, aumenta.
Kp2=40 Kp2=45 Kp2=50 Kp2=55 Min -1,1616 -1,1686 -1,1881 -1,2168 Max 0,7936 0,7986 0,8120 0,8317
Al igual que antes, se aumenta Kp1 para compensar el control.
Siendo el control (7) el siguiente:
Capítulo 3: Diseño Conceptual 46
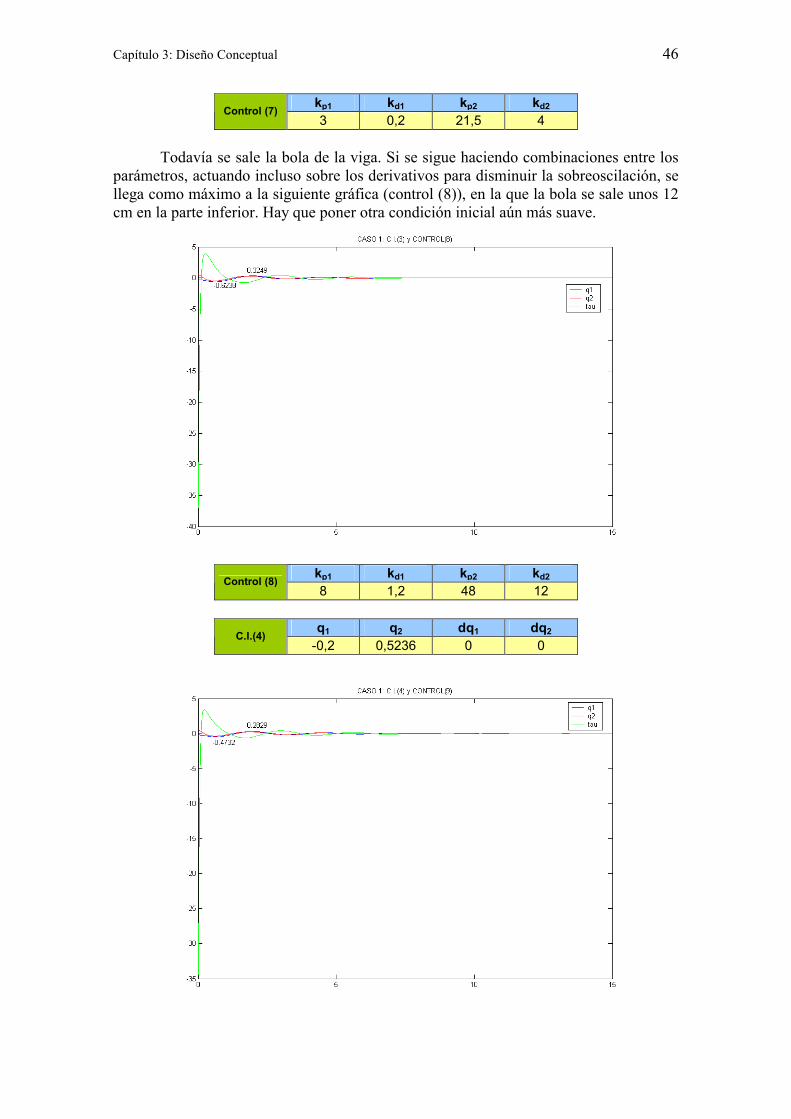
kp1 kd1 kp2 kd2 Control (7) 3 0,2 21,5 4
Todavía se sale la bola de la viga. Si se sigue haciendo combinaciones entre los parámetros, actuando incluso sobre los derivativos para disminuir la sobreoscilación, se llega como máximo a la siguiente gráfica (control (8)), en la que la bola se sale unos 12 cm en la parte inferior. Hay que poner otra condición inicial aún más suave.
kp1 kd1 kp2 kd2 Control (8) 8 1,2 48 12
q1 q2 dq1 dq2 C.I.(4)
-0,2 0,5236 0 0
Capítulo 3: Diseño Conceptual 47
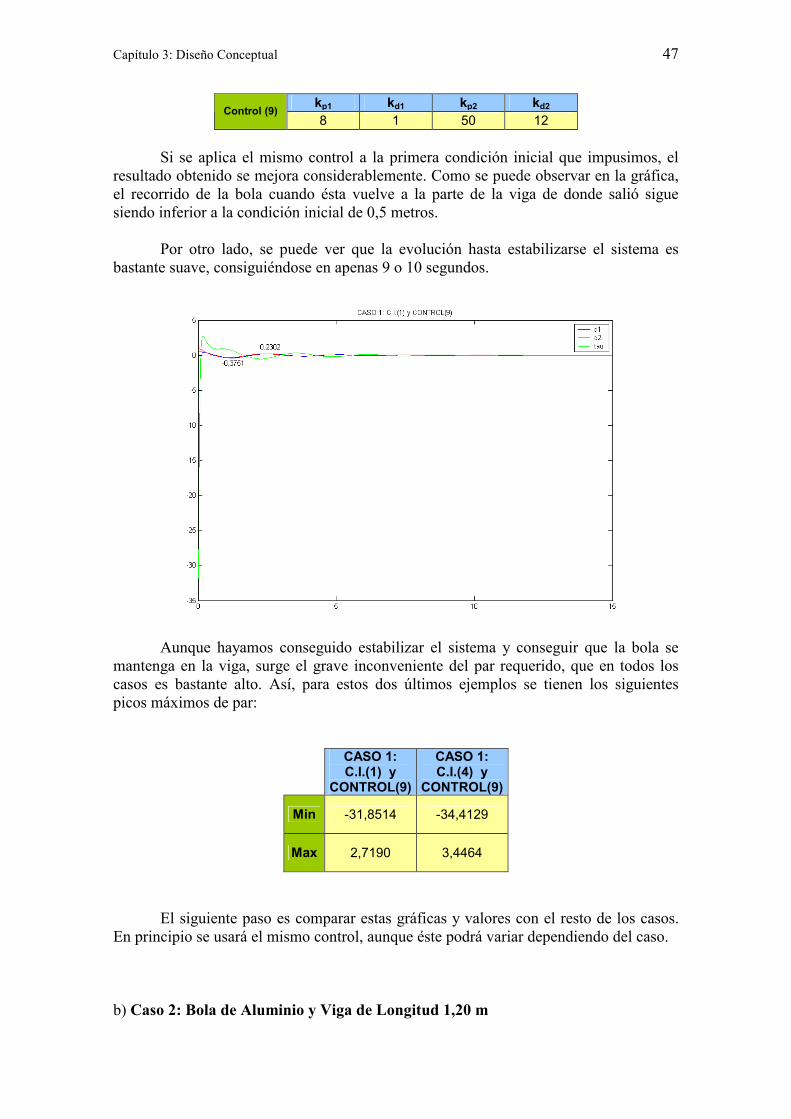
kp1 kd1 kp2 kd2 Control (9) 8 1 50 12
Si se aplica el mismo control a la primera condición inicial que impusimos, el resultado obtenido se mejora considerablemente. Como se puede observar en la gráfica, el recorrido de la bola cuando ésta vuelve a la parte de la viga de donde salió sigue siendo inferior a la condición inicial de 0,5 metros.
Por otro lado, se puede ver que la evolución hasta estabilizarse el sistema es bastante suave, consiguiéndose en apenas 9 o 10 segundos.
Aunque hayamos conseguido estabilizar el sistema y conseguir que la bola se mantenga en la viga, surge el grave inconveniente del par requerido, que en todos los casos es bastante alto. Así, para estos dos últimos ejemplos se tienen los siguientes picos máximos de par:
CASO 1: C.I.(1) y
CONTROL(9)
CASO 1: C.I.(4) y
CONTROL(9)
Min -31,8514 -34,4129
Max 2,7190 3,4464
El siguiente paso es comparar estas gráficas y valores con el resto de los casos. En principio se usará el mismo control, aunque éste podrá variar dependiendo del caso. b) Caso 2: Bola de Aluminio y Viga de Longitud 1,20 m
Capítulo 3: Diseño Conceptual 48
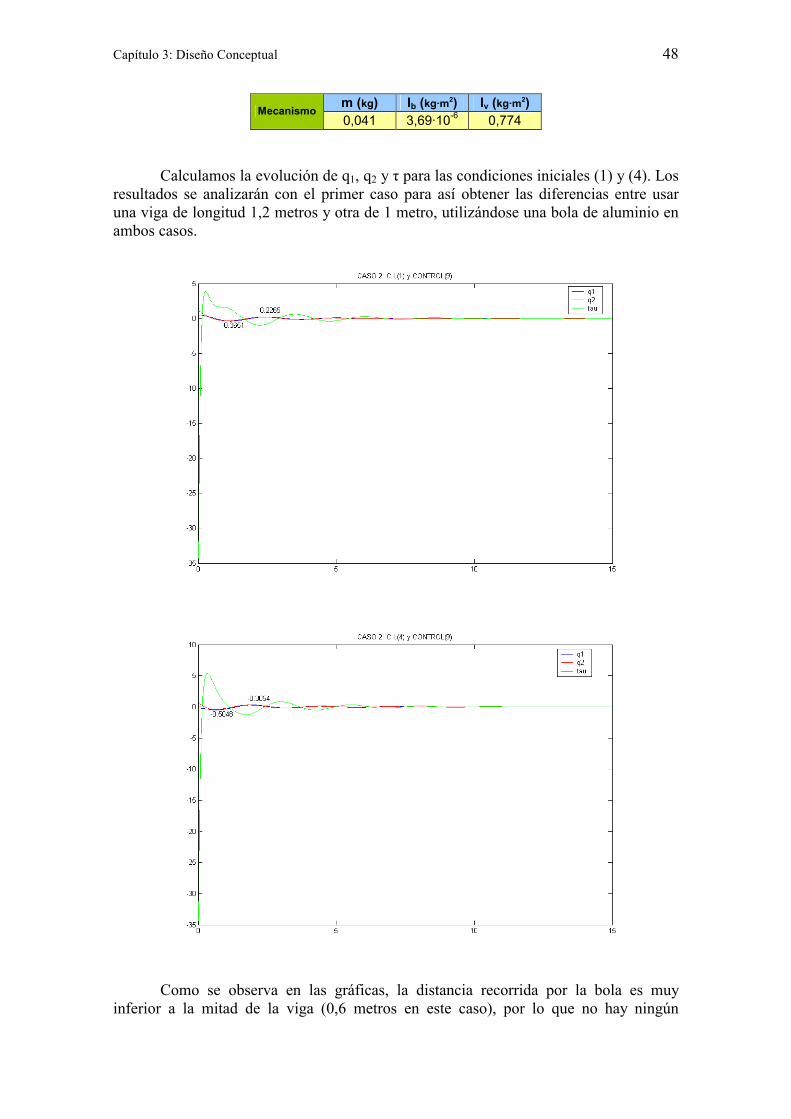
m (kg) Ib (kg·m2) Iv (kg·m2) Mecanismo 0,041 3,69·10-6 0,774
Calculamos la evolución de q1, q2 y τ para las condiciones iniciales (1) y (4). Los resultados se analizarán con el primer caso para así obtener las diferencias entre usar una viga de longitud 1,2 metros y otra de 1 metro, utilizándose una bola de aluminio en ambos casos.
Como se observa en las gráficas, la distancia recorrida por la bola es muy inferior a la mitad de la viga (0,6 metros en este caso), por lo que no hay ningún
Capítulo 3: Diseño Conceptual 49
problema en este sentido. Como sobra todavía alguna distancia hasta el borde, el control se podría suavizar, y por tanto, obtenerse unos pares inferiores.
CASO 2: C.I.(1) y
CONTROL(9)
CASO 2: C.I.(4) y
CONTROL(9)
Min -34,2817 -34,4129
Max 3,8812 5,3787
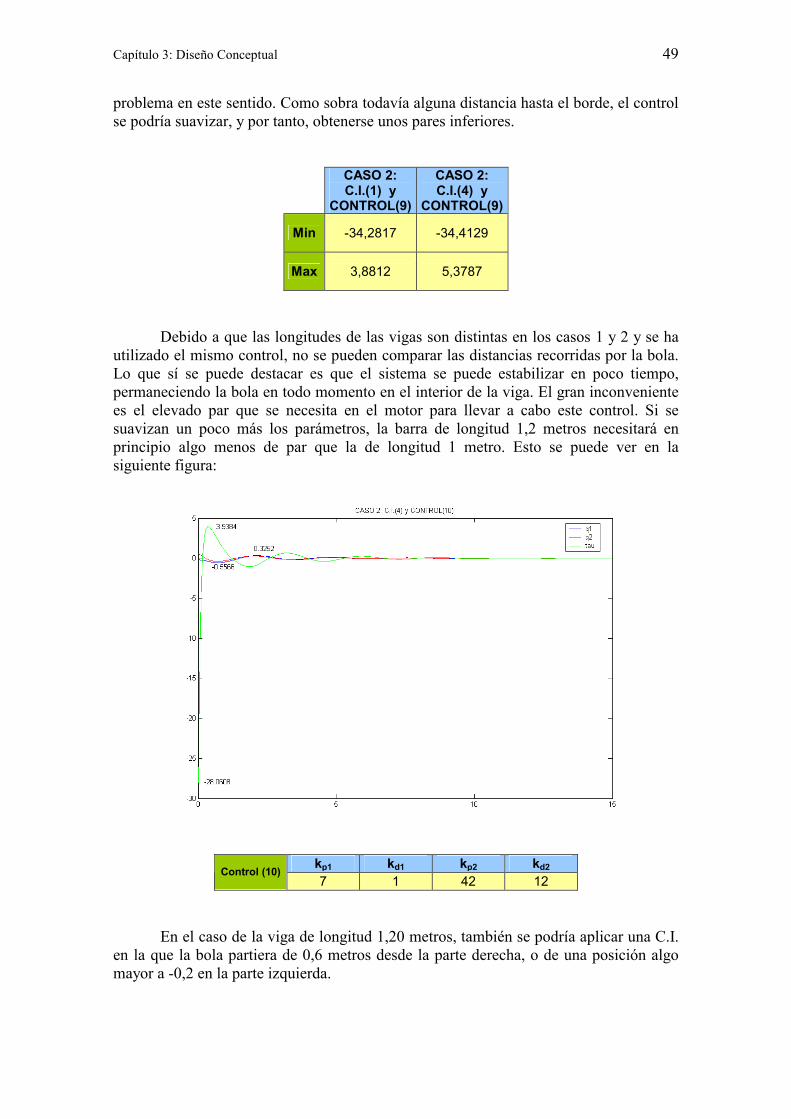
Debido a que las longitudes de las vigas son distintas en los casos 1 y 2 y se ha utilizado el mismo control, no se pueden comparar las distancias recorridas por la bola. Lo que sí se puede destacar es que el sistema se puede estabilizar en poco tiempo, permaneciendo la bola en todo momento en el interior de la viga. El gran inconveniente es el elevado par que se necesita en el motor para llevar a cabo este control. Si se suavizan un poco más los parámetros, la barra de longitud 1,2 metros necesitará en principio algo menos de par que la de longitud 1 metro. Esto se puede ver en la siguiente figura:
kp1 kd1 kp2 kd2 Control (10) 7 1 42 12
En el caso de la viga de longitud 1,20 metros, también se podría aplicar una C.I. en la que la bola partiera de 0,6 metros desde la parte derecha, o de una posición algo mayor a -0,2 en la parte izquierda.
Capítulo 3: Diseño Conceptual 50
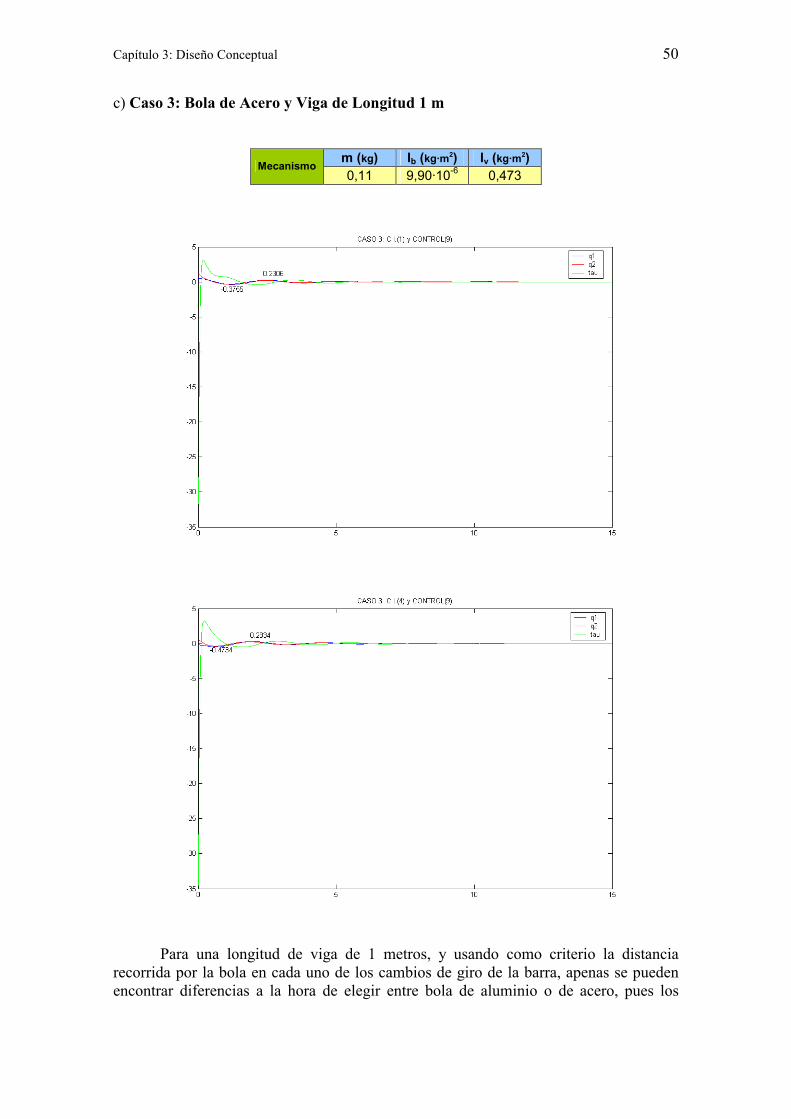
c) Caso 3: Bola de Acero y Viga de Longitud 1 m
m (kg) Ib (kg·m2) Iv (kg·m2) Mecanismo 0,11 9,90·10-6 0,473
Para una longitud de viga de 1 metros, y usando como criterio la distancia recorrida por la bola en cada uno de los cambios de giro de la barra, apenas se pueden encontrar diferencias a la hora de elegir entre bola de aluminio o de acero, pues los
Capítulo 3: Diseño Conceptual 51
valores oscilan en un rango de 0 a 10 mm. Si se tiene en cuanta el par, éste también es prácticamente igual.
CASO 3: C.I.(1) y
CONTROL(9)
CASO 3: C.I.(4) y
CONTROL(9)
Min -31,6823 -34,5300
Max 3,0997 3,2297
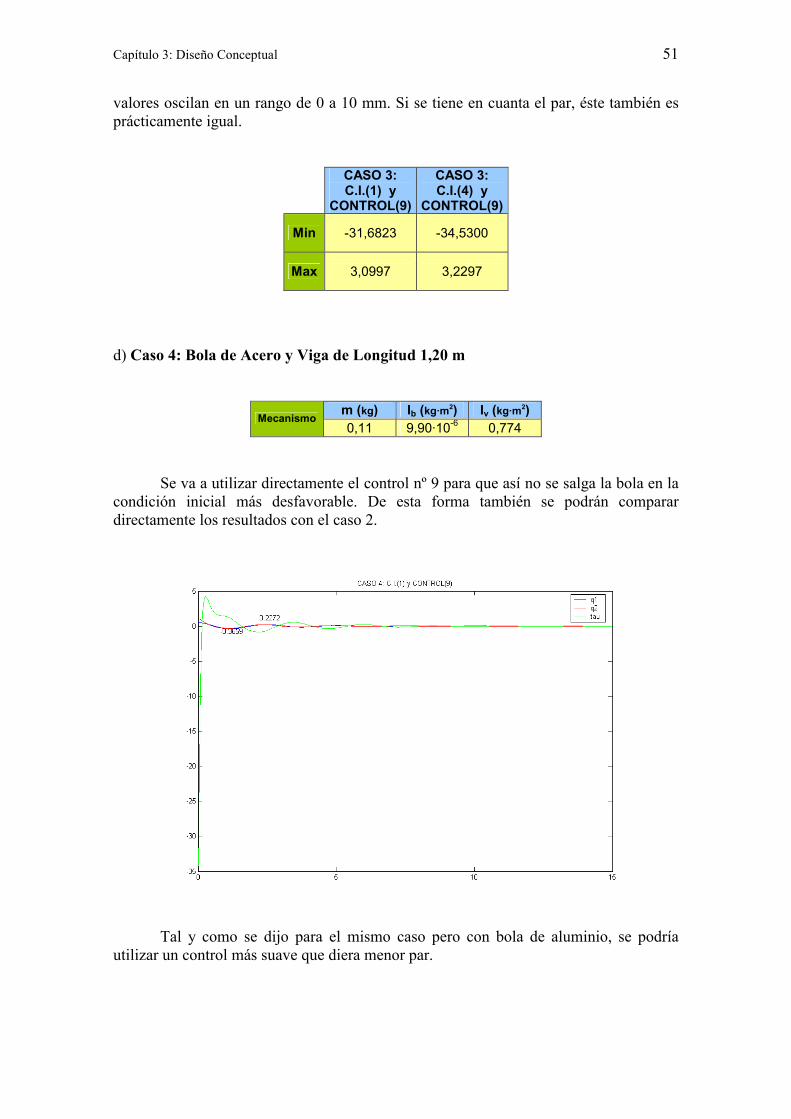
d) Caso 4: Bola de Acero y Viga de Longitud 1,20 m
m (kg) Ib (kg·m2) Iv (kg·m2) Mecanismo 0,11 9,90·10-6 0,774
Se va a utilizar directamente el control nº 9 para que así no se salga la bola en la condición inicial más desfavorable. De esta forma también se podrán comparar directamente los resultados con el caso 2.
Tal y como se dijo para el mismo caso pero con bola de aluminio, se podría utilizar un control más suave que diera menor par.
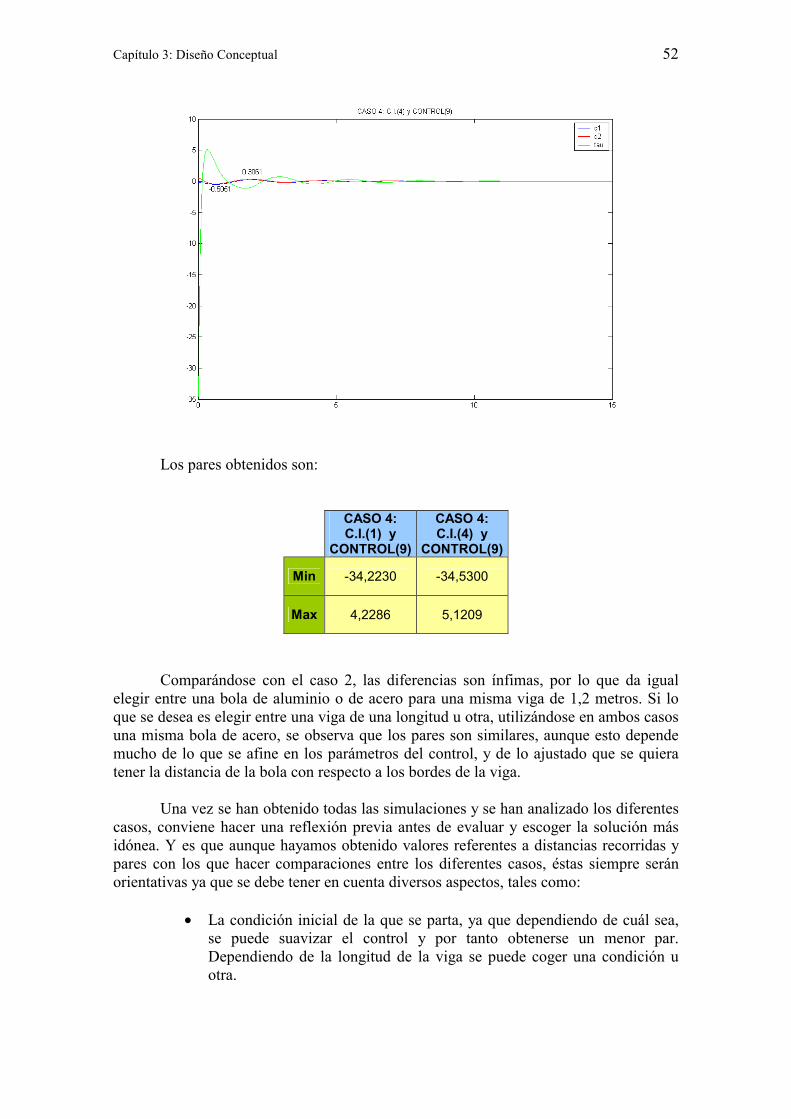
Capítulo 3: Diseño Conceptual 52
Los pares obtenidos son:
CASO 4: C.I.(1) y
CONTROL(9)
CASO 4: C.I.(4) y
CONTROL(9)
Min -34,2230 -34,5300
Max 4,2286 5,1209
Comparándose con el caso 2, las diferencias son ínfimas, por lo que da igual elegir entre una bola de aluminio o de acero para una misma viga de 1,2 metros. Si lo que se desea es elegir entre una viga de una longitud u otra, utilizándose en ambos casos una misma bola de acero, se observa que los pares son similares, aunque esto depende mucho de lo que se afine en los parámetros del control, y de lo ajustado que se quiera tener la distancia de la bola con respecto a los bordes de la viga. Una vez se han obtenido todas las simulaciones y se han analizado los diferentes casos, conviene hacer una reflexión previa antes de evaluar y escoger la solución más idónea. Y es que aunque hayamos obtenido valores referentes a distancias recorridas y pares con los que hacer comparaciones entre los diferentes casos, éstas siempre serán orientativas ya que se debe tener en cuenta diversos aspectos, tales como:
• La condición inicial de la que se parta, ya que dependiendo de cuál sea, se puede suavizar el control y por tanto obtenerse un menor par. Dependiendo de la longitud de la viga se puede coger una condición u otra.
Capítulo 3: Diseño Conceptual 53
• Las distintas combinaciones entre los parámetros del control, que pueden hacer que mejoren o empeoren los máximos y mínimos de las distintas variables.
• El esquema de control usado.
De esta forma no resulta nada fácil elegir uno de los diferentes casos propuestos.
Una de las opciones que sí se puede resolver sin problemas es el tipo de bola que se va a usar. Como ya se ha demostrado, apenas existen diferencias en la simulación realizada con una bola de aluminio y la realizada con una de acero. Debido a que es más fácil encontrar en el mercado bolas de éste último material, se elige finalmente una bola de acero para nuestro sistema Ball & Beam.
En cuanto a la elección de la longitud de la viga, ésta dependerá de diversos
factores. Si tenemos en cuenta el peso, volumen, entorno de trabajo y coste, será más conveniente la barra de longitud 1 metro. El problema que se tiene, tanto para esta viga como para la de mayor tamaño, es el par que se requiere en los giros, y que es mucho más elevado que el proporcionado por el motor del que disponemos. Por tanto, es necesario realizar un estudio detallado de la posibilidad de incorporar un reductor que aumente el par considerablemente. Este punto se desarrolla en el siguiente capítulo.





















![Pletinas de Anclaje[1]](https://img.pdfslide.tips/doc/110x75/55cf9d55550346d033ad29f6/pletinas-de-anclaje1.jpg)






