-
Elementos de un proceso a automatizar 13
1 Elementos de un proceso a automatizar
Un proceso a automatizar requiere tener en cuenta un conjunto de
elementos, cada uno de los cualesrealiza su funcin dentro del
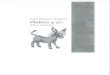
proceso. Podramos representar el proceso con el sistema de control
yestos elementos mediante el grfico de la figura 1.
Fig. 1
Seguidamente trataremos cada uno de los elementos que aparecen
en este grfico a fin de tener unavisin general de las necesidades y
posibilidades de la automatizacin industrial.
1.1 Elementos de entrada de rdenes
Son los que permiten al operador la entrada de datos y rdenes al
sistema. Podemos clasificarlos endos categoras: binarios y numricos
(o alfanumricos). Los elementos binarios son los que nospermiten
entrar rdenes del tipo s/no (cierto/falso, activado/desactivado,
etc.). Entre ellos destaca el
-
14 Automatismos elctricos programables
pulsador que es el ms usado en el entorno industrial, sin
embargo, podemos destacar tambin losinterruptores, los
conmutadores, etc.
Los elementos numricos permiten la entrada de nmeros
(codificados de diversas formas, como yaveremos). Los ms corrientes
son los preselectores digitales que son elementos con una
ruedanumerada (habitualmente del 0 al 9) que se puede hacer girar
en uno u otro sentido mediante unosbotones; el valor que aparece en
el frontal del preselector es el que se enva al sistema de
control.Tambin destacan los teclados numricos.
Los elementos alfanumricos permiten entrar letras y nmeros (a
menudo codificados en cdigoASCII), en la mayor parte de los casos
se trata de teclados.
1.2 Elementos de entrada de informacin
Los elementos de entrada de informacin se pueden clasificar segn
el tipo de seal que faciliten osegn la magnitud que indiquen.
Segn el tipo de seal podemos distinguir los binarios, los
numricos y los analgicos. Los binarioscomparan la magnitud con una
referencia (umbral) y la salida corresponde al resultado de
lacomparacin (mayor/menor); un ejemplo podra ser un termostato. Los
numricos facilitan un cdigonumrico que corresponde al valor de la
magnitud leda; un ejemplo podra ser un codificador deposicin axial
absoluto (encoder).
Los analgicos dan una seal en forma de tensin elctrica (o de
corriente elctrica) proporcional alvalor de la magnitud; por
ejemplo podemos citar un transductor de par mecnico. Las
informacionesde tipo analgico se presentan habitualmente en uno de
los siguientes cuatro rangos: 0 a 10 V, 0 a 20mA, -10 a 10 V y 4 a
20 mA
Las seales en corriente (0-20 mA y 4-20 mA) tienen la ventaja
respecto a los de tensin de no verseafectados por la longitud de
los conductores; adems el tipo 4-20 mA facilita la deteccin de
averasdado que el valor 0 mA slo se puede obtener en caso de mal
funcionamiento. Por estos motivos eltipo 4-20 mA es el ms usado en
el entorno industrial.
Las magnitudes a detectar o medir son muchas, podemos destacar
algunas: Temperatura, presin,caudal, pH, posicin, velocidad,
aceleracin, fuerza, par mecnico, deformacin, corriente
elctrica,tensin elctrica, potencia, iluminacin, presencia (final de
carrera), proximidad (inductivos,capacitivos,...), etc.
Adems podemos incluir dentro de esta categora los avisos (todos
ellos binarios) procedentes de lospreaccionadores; como podran ser
estado de contactores, fusibles, rels trmicos, etc.
-
Elementos de un proceso a automatizar 15
1.3 Elementos de salida de informacin
Se encargan de la comunicacin con el operador. Se pueden
clasificar de forma similar a los de entradade rdenes. Los
elementos binarios son los que dan informaciones del tipo s/no
(cierto/falso,activado/desactivado, etc.). Entre ellos destaca el
piloto visualizador, pero tambin podemos citar lostimbres, las
sirenas, etc.
Los elementos numricos y alfanumricos permiten la visualizacin
de nmeros o de nmeros y texto.Los ms sencillos son los displays de
7 segmentos y los displays alfanumricos, pero tambin destacanlas
pantallas de cristal lquido (LCD) que permiten mensajes ms largos y
complejos o los monitores(parecidos a pantallas de ordenador) que
permiten presentar grficos (por ejemplo sinpticos) fijos oen
movimiento.
1.4 Preaccionadores y accionadores
Los accionadores son los encargados de actuar sobre el proceso.
A menudo los accionadores no sondirectamente conectables al sistema
de control y requieren preaccionadores.
Por ejemplo, un motor elctrico necesita un contactor (o un
interruptor) o un variador de velocidadpara poder funcionar, un
cilindro neumtico necesitar una vlvula distribuidora; un cilindro o
unmotor hidrulico necesitar una vlvula distribuidora o una vlvula
proporcional; a un calentadorelctrico le har falta un contactor o
un variador de tensin; etc. Fijmonos que entre los citados
hayelementos binarios (contactor, vlvula distribuidora) y elementos
de pedido analgico (variador detensin, vlvulas proporcionales).
1.5 Sistema de tratamiento de la informacin
El sistema de tratamiento de la informacin establece la forma en
que se tienen que combinar lasentradas de informacin a fin de
activar las salidas del proceso. Cuando una combinacin de
entradassiempre da lugar a la misma combinacin de salidas se dice
que el proceso es de tipo combinacional.
Fig. 2
-
16 Automatismos elctricos programables
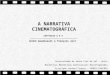
El circuito de una mquina de picar carne (figura 2) sera un
circuito combinacional. Su tabla defuncionamiento sera la tabla
1.
Tabla 1
P D M
No No No
Si No No
No Si No
Si Si Si
Cuando una combinacin de entradas da lugar a combinaciones
diferentes de salidas dependiendo dela historia que ha seguido el
proceso para llegar donde est, se dice que el proceso es de
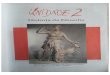
tiposecuencial. Un ejemplo de circuito secuencial podra ser un
circuito marcha-parada (figura 3).
Fig. 3
Tabla 2
P M R R P M R R
No No No No Si No No No
No No Si Si Si No Si No
No Si No Si Si Si No No
No Si Si Si Si Si Si No
-
Elementos de un proceso a automatizar 17
En este circuito el pulsador M activa un rel R. Un contacto de
este rel hace un puente al pulsadorM. Esto hace que el pulsador se
pueda dejar sin que se desactive el rel. Para desactivar el rel
esnecesario apretar el pulsador P. Esto se ve reflejado en la tabla
de funcionamiento (tabla 2) dondeobservamos que entre las
condiciones aparece el propio rel.
-
lgebra de Boole 19
2 lgebra de BooleEl lgebra de Boole describe el conjunto de
propiedades que cumplen las funciones bsicas de lalgica. Dado que
todos nuestros elementos slo pueden tener dos valores (1 y 0)
podemos decir quenuestra lgebra es de tipo binario.
Los elementos de entrada de seales a un circuito (pulsadores,
interruptores, etc.) pueden tener dosestados: conectado (cerrado) y
desconectado (abierto). Los elementos de salida (contactores,
rels,electrovlvulas, etc.) tambin tienen dos estados: excitado
(trabajo) y desexcitado (reposo).
El primer estado (conectado, excitado) lo representamos por 1 y
el segundo (desconectado,desexcitado) por 0. Estas cifras (1 y 0)
corresponden a la forma que la lgica usa para representarcualquiera
de las combinaciones s-no, cierto-falso, presente-ausente,
conectado-desconectado, etc.
Para describir la ecuacin de un circuito, siempre partiremos de
la situacin de reposo (y, por tanto,la ms segura) de sus
componentes.
2.1 Elementos bsicos de una maniobra elctrica
Definimos como elementos base de una maniobra elctrica los
siguientes:
Pulsador normalmente abierto
Cuando est apretado, deja pasar corriente por l y podemos
escribir P1=1. Si no est apretado, no dejapasar corriente y
escribimos P1=0.
Fig. 4
-
20 Automatismos elctricos programables
Bajo esta simbologa inclumos, adems del pulsador, otros
elementos que cambian de estado poractuaciones externas al circuito
de maniobra (final de carrera, detector de proximidad, etc.).
Bobina de rel (o de contactor)
Cuando pasa corriente por l, est excitada y decimos que r1=1. Si
no pasa corriente por l, estdesexcitada y escribimos r1=0. Dentro
de este elemento consideramos otros elementos de
salida(electrovlvulas, etc.) que al hacer los esquemas dibujaremos
con un smbolo diferente segn se tercie.
Fig. 5
Contacto normalmente abierto de un rel (o contactor)
Este caso es similar al del pulsador normalmente abierto pero el
cambio de estado es por causasinternas al circuito de maniobra.
Cuando el rel est excitado (r1=1), deja pasar corriente por
elcontacto y decimos R1=1. En caso contrario (r1=0) tenemos
R1=0.
Fig. 6
Conviene mencionar que estamos representando las bobinas de los
rels por letras minsculas y suscontactos por maysculas.
2.2 Elementos complementarios de una maniobra elctrica
Adems de los elementos citados, conocemos otros dos tipos de
elementos: pulsador normalmentecerrado y contacto normalmente
cerrado de un rel. Estos elementos son los complementarios de dosde
los elementos anteriores y los representaremos con una raya encima.
As:
-
lgebra de Boole 21
Pulsador normalmente cerrado
Cuando est apretado, es decir cuando P1 = 0 , no pasa corriente
por l. Si no est apretado, es decirsi P1 = 1 , pasa corriente por
l.
Fig. 7
Contacto normalmente cerrado de rel
Cuando el rel est desactivado, es decir si r1 = 0 ser R1 = 1 y
pasa corriente por l. Si estactivado, es decir si r1 = 1 , ser R1 =
0 y no pasa corriente por l.
Fig. 8
2.3 Elementos bsicos del lgebra de Boole
En el caso de las maniobras elctricas, el lgebra de Boole
permite escribir las siguientes expresionescomo representacin de
los esquemas que las acompaen.
Fig. 9
r1 = 0
Rel siempre desactivado
-
22 Automatismos elctricos programables
Fig. 10
r1 = 1
Rel siempre activado
Fig. 11
r1 = P1
Rel concordante con pulsador
Fig. 12
r1 = P1
Rel discordante con pulsador
2.4 Funciones base del lgebra de Boole
Las funciones base del lgebra son aquellas sobre las cuales se
definen las propiedades quecaracterizan cada lgebra. Las funciones
de nuestra lgebra sern AND (y-lgica) y OR (o-lgica).
Las propiedades de las funciones base se exponen, como se hace
con otras lgebras, para los casos dedos y tres elementos, segn se
tercie. Su generalizacin es evidente.
Para clarificar conceptos vale la pena mencionar en el caso del
lgebra de los nmeros reales, lasfunciones son adicin (suma) y
multiplicacin (producto).
-
lgebra de Boole 23
2.4.1 Funcin AND
Corresponde al caso en que hay dos pulsadores (P1, P2) en serie.
Este circuito deja pasar corrientecuando P1 y P2 estn apretados;
tal como muestra el circuito de la figura 13 y la tabla de
verdadque le acompaa (tabla 3). Para simplificar la funcin AND a
menudo se representa con un punto .
Tabla 3
P1 P2 r1
0 0 0
0 1 0
1 0 0
1 1 1Fig. 13
r1 = P1 AND P2 = P1 P2
P1 P2 r1] [ ] [ ( )
La funcin AND viene caracterizada por una serie de propiedades
que comentamos a continuacin.
La propiedad conmutativa dice que el orden de los operandos no
altera el resultado.
P1 P2 = P2 P1 (2.1)
La propiedad asociativa dice que en caso de tener que operar con
tres elementos, no importa el ordencon que se hacen las operaciones
parciales.
(P1 P2) P3 = P1 (P2 P3) (2.2)
El 0 es un elemento nulo ya que operado con cualquier otro el
resultado es 0.
P1 0 = 0 (2.3)
El 1 es el elemento neutro ya que operado con una variable la
deja invariante.
P1 1 = P1 (2.4)
Presenta idempotencia dado que al operar una variable consigo se
obtiene la misma variable.
P1 P1 = P1 (2.5)
-
24 Automatismos elctricos programables
Cada elemento tiene un elemento simtrico que operado consigo da
el elemento nulo.
P1 P1 = 0 (2.6)
2.4.2 Funcin OR
Corresponde al caso en que hay dos pulsadores (P1, P2) en
paralelo. Este circuito deja pasar corrientecuando P1 o P2 (o
ambos) estn apretados; tal como muestra el circuito de la figura 14
y la tablade verdad (tabla 4) que le acompaa. Para simplificar la
funcin OR a menudo se representa con unacruz + .
Tabla 4
P1 P2 r1
0 0 0
0 1 1
1 0 1
1 1 1 Fig. 14
r1 = P1 OR P2 = P1 + P2
P1 r1] [ ( )
P2] [
La funcin OR viene caracterizada por una serie de propiedades
que comentamos a continuacin.
La propiedad conmutativa dice que el orden de los operandos no
altera el resultado.
P1 + P2 = P2 + P1 (2.7)
La propiedad asociativa dice que en caso de tener que operar con
tres elementos, no importa el ordencon que se hacen las operaciones
parciales.
(P1 + P2) + P3 = P1 + (P2 + P3) (2.8)
El 1 es un elemento nulo ya que operado con cualquier otro el
resultado es 1.
P1 + 1 = 1 (2.9)
El 0 es el elemento neutro ya que operado con una variable la
deja invariante.
P1 + 0 = P1 (2.10)
-
lgebra de Boole 25
Presenta idempotencia dado que al operar una variable consigo se
obtiene la misma variable.
P1 + P1 = P1 (2.11)
Cada elemento tiene un elemento simtrico que operado consigo da
el elemento nulo.
P1 + P1 = 1 (2.12)
2.4.3 Propiedades distributivas
Las propiedades distributivas son aquellas en que intervienen
las dos funciones sobre tres elementos.
Propiedad distributiva de respecto de +
P1 (P2 + P3) = P1 P2 + P1 P3 (2.13)
Propiedad distributiva de + respecto de
P1 + (P2 P3) = (P1 + P2) (P1 + P3) (2.14)
-
Sistemas de numeracin y representacin 27
3 Sistemas de numeracin y representacin
En la vida cotidiana las personas cuentan segn el sistema
decimal, es decir usando 10 cifras (0, 1,2, 3, 4, 5, 6, 7, 8 y 9).
En vez de este sistema se poda haber usado arbitrariamente
cualquier otro peroste fue el adoptado, probablemente porque en la
poca en que se hizo se contaba con los dedos delas dos manos.
En el sistema decimal, para expresar un nmero mayor que 9 se
ponen dos cifras de lado, la primerade ellas expresa el nmero
entero de veces que es necesario contar hasta 10 y la segunda el
resto quees necesario aadirle; as podemos contar hasta 99. Para
contar hasta ms arriba slo es necesario iraumentando el nmero de
cifras.
Por ejemplo el nmero cuarenta y siete mil quinientos ochenta y
tres se descompone segn puede verseen la figura 15.
Fig. 15
4 decenas de millar = 4 104 = 4 10000 = 40000
7 unidades de millar = 7 103 = 7 1000 = 7000
5 centenas = 5 102 = 5 100 = 500
8 decenas = 8 101 = 8 10 = 80
3 unidades = 3 100 = 3 1 = 3
47583
As un mismo nmero puede ser representado en cualquier sistema de
numeracin que se nos puedaocurrir.
Por ejemplo, si decidimos contar en base 5 (con los dedos de una
mano) escribiremos el nmeroanterior como 3010313; vemoslo en la
figura 16.
-
28 Automatismos elctricos programables
Fig. 16
3 56 = 3 15625 = 46875
0 55 = 0 3125 = 0
1 54 = 1 625 = 625
0 53 = 0 125 = 0
3 52 = 3 25 = 75
1 51 = 1 5 = 5
3 50 = 3 1 = 3
47583
Hasta ahora sabemos convertir un nmero de cualquier base a
decimal. Para hacer la conversin ensentido contrario vamos
dividiendo el nmero por la base deseada hasta llegar a un cociente
de cero;entonces todos los restos obtenidos ledos en orden inverso
dan el nmero deseado. As podemosconvertir 47583 a base 5 como se
observa en la figura 17.
Fig. 17
47583 : 5 = 9516 3
9516 : 5 = 1903 1
1903 : 5 = 380 3
380 : 5 = 76 0
76 : 5 = 15 1
15 : 5 = 3 0
3 : 5 = 0 3
3010313
3.1 Sistemas binario, octal y hexadecimal
Los ordenadores y los autmatas son equipos electrnicos y, como
tales, slo son capaces de almacenardos valores que corresponden a
los estados con corriente y sin corriente. Por este motivo
estasmquinas trabajan internamente en forma binaria (base 2).
-
Sistemas de numeracin y representacin 29
El cdigo binario tiene slo dos valores (0 y 1), lo que hace que
un nmero escrito en binario tengamuchas ms cifras que en decimal.
Por ejemplo 47583 escrito en binario ser 1011100111011111.
A la hora de trabajar con ordenadores y autmatas no es cmodo
trabajar en binario y, por esto, losusuarios pueden trabajar, segn
los casos, en octal o hexadecimal.
En el sistema hexadecimal (base 16) disponemos de 16 cifras (0,
1, 2, 3, 4, 5, 6, 7, 8, 9, A, B, C, D,E i F). Demonos cuenta de que
para evitar confusiones en la escritura a las 6 cifras superiores a
9 seles asigna una letra. Como ejemplo el nmero 47583 se escribira
en hexadecimal como B9DF,comprobmoslo en la figura 18.
Fig. 18
B 163 = 11 4096 = 45056
9 162 = 9 256 = 2304
D 161 = 13 16 = 208
F 160 = 15 1 = 15
47583
En el sistema octal (base 8) trabajamos con dgitos entre 0 y 7.
El nmero 134737 escrito en octal,valdr 47583 en decimal como se ve
en la figura 19.
Fig. 19
1 85 = 1 32768 = 32768
3 84 = 3 4096 = 12288
4 83 = 4 512 = 2048
7 82 = 7 64 = 448
3 81 = 3 8 = 24
7 80 = 7 1 = 7
47583
-
30 Automatismos elctricos programables
3.2 Cdigo BCD
A menudo un nmero tiene que ser representado en un display de
salida. En este caso es habitualescribir este nmero en cdigo BCD
(decimal codificado en binario). Un nmero en cdigo BCDconsta de una
sucesin de grupos de cuatro cifras binarias donde cada bloque es la
cifra decimalcorrespondiente escrita en binario. As el nmero 47583
se escribe en BCD como se puede ver en lafigura 20.
Fig. 20
0100 0111 0101 1000 0011
4 7 5 8 3
3.3 Bits, bytes, nibbles, etc.
Los ordenadores y autmatas suelen tener la memoria dividida en
bloques iguales. Cada celda dememoria puede contener una cifra
binaria (pasa corriente o no pasa corriente); es habitual asignar
elvalor 1 cuando est activada (pasa corriente) y el 0 cuando no lo
est (no pasa corriente). A una cifrabinaria se la llama bit. La
agrupacin de 4 bits forma un nibble y la de 8 bits forma un byte
(tambinllamado octeto). La agrupacin de bits funcional de un
microprocesador se llama palabra; hay sistemascon palabras de 8
bits, otras de 16 bits, etc.
Normalmente la capacidad de memoria de un equipo es una potencia
de 2. Por ejemplo: 1024 bytes,16384 bytes, 32768 bytes, 65536
bytes, etc. Para facilitar el contado de la capacidad de memoria
(ytambin de otros datos) a menudo se cuenta en kilobytes o en
megabytes. En este caso el prefijo kilono indica mil sino la
potencia de dos ms prxima, o sea 1024. De la misma manera mega
indica1048576. As una memoria de 64 kB tiene 65536 bytes.
3.4 Cdigo ASCII
Muchas veces se desea representar un texto en un display de
salida. En este caso es habitual escribireste texto en cdigo ASCII.
Un carcter ASCII viene representado por un nmero entre 0 y 127,
portanto, en un nmero de 7 bits. Los cdigos ASCII son los de la
tabla 5 donde los espacios sombreadoscorresponden a los caracteres
de control.
-
Sistemas de numeracin y representacin 31
Tabla 5
0 1 2 3 4 5 6 7 8 9
0
10
20
30 ! " # $ % & 40 ( ) * + , - . / 0 150 2 3 4 5 6 7 8 9 :
;
60 < = > ? @ A B C D E
70 F G H I J K L M N O
80 P Q R S T U V W X Y90 Z [ \ ] ^ _ a b c100 d e f g h i j k l
m110 n o p q r s t u v w
120 x y z { | }
Dado que habitualmente se trabaja con sistemas hexadecimal u
octal se suelen usar 8 bits para designarun carcter, de manera que
el bit ms significativo es siempre 0; de esta forma en un octeto
cabe uncarcter y en una palabra de 16 bits caben dos.
-
Evolucin de los automatismos industriales 33
4 Evolucin de los automatismos industriales
Tomemos el caso de la maniobra de un ascensor como ejemplo de
automatismo. Las entradas son lospulsadores de las plantas y la
cabina, los detectores de posicin de la cabina, los detectores de
puertaabierta, el rel trmico, etc. Los elementos de salida son los
pilotos de planta actual, ocupado,direccin, etc., el timbre de
alarma y el motor.
Para automatizar el proceso podemos usar cualquier sistema que
nos permita actuar sobre las salidas.A lo largo de la historia ha
habido diversas formas de implantacin de los automatismos
industriales(no todas ellas se han usado exhaustivamente en la
automatizacin de ascensores).
4.1 La lgica cableada (o electromecnica)
La lgica cableada fue la primera que se us y la de ms gran
difusin pues la mayora de losautomatismos se han hecho de esta
manera.
Consiste en interconectar rels con los elementos de entrada y
salida para que, a base de conexionesen serie y en paralelo de
elementos, al final se obtenga el automatismo deseado. Se dispone
de diversoselementos: rels de conmutacin, contactores, rels de
funciones lgicas, temporizadores, rels decontrol, etc.
Este tipo de automatismo tiene el inconveniente del gran volumen
ocupado por el automatismo.Ciertamente, las dimensiones de un rel
son importantes y las funciones que permite hacer son
pocas(enclavamiento, negacin). Esto hace que se intente reducir al
mximo su nmero de manera que losesquemas de conexionado se vuelven
difciles de interpretar. Cuando los automatismos se complicanlos
esquemas son realizados de forma intuitiva. La modificacin de un
automatismo pasa a menudopor desmontar una buena parte y cablearlo
de nuevo. Adems, a causa de la presencia de contactosmviles,
necesitan un mantenimiento importante.
En caso de automatismos sencillos esta solucin contina teniendo
ventajas ya que la lgica cableadaes la nica que no requiere
forzosamente un cambio de los niveles de tensin entre el
automatismo ylos elementos a controlar.
-
34 Automatismos elctricos programables
En cualquier caso las representaciones a base de rels todava son
la forma de representar unautomatismo ms familiar del personal de
mantenimiento, lo cual hace que los autmatas programablesusen un
lenguaje de programacin a base de diagramas de rels.
4.2 La lgica neumtica
Se basa en usar aire comprimido y diversos tipos de elementos:
vlvulas distribuidoras, detectores,pulsadores y pilotos neumticos,
vlvulas biestables, cilindros neumticos, vlvulas de
funcioneslgicas, etc.
Tiene la ventaja de que no se ve afectada por las interferencias
electromagnticas pero necesita muchoespacio y crea un ruido
importante; adems, es necesario un compresor. La distribucin del
airecomprimido es ms compleja que la de la energa elctrica a causa
del dimetro de los tubos y delradio mnimo de curvatura. Necesita un
mantenimiento importante.
La lgica neumtica resulta interesante cuando se trata de
automatismos sencillos que actan sobreaccionamientos neumticos.
En caso de que se requiera una potencia o precisin mayor puede
usarse la oleohidrulica.
4.3 La lgica esttica discreta
Poco despus de la aparicin de los transistores se empezaron a
usar circuitos electrnicos para realizarlas funciones. Los
diseadores montaban circuitos con resistencias, transistores y
diodos a fin decontrolar los automatismos. Este mtodo tena el
inconveniente de que era preciso un cambio deniveles de tensin
entre la potencia y la lgica pero en circuitos complejos
significaba una importantereduccin de volumen; adems, el uso de
componentes estticos disminua los problemas ya que nohaba ningn
contacto mvil que se pudiese desgastar; esto les permita tambin una
mayor velocidadde respuesta.
Las puertas lgicas aparecieron para simplificar el montaje ya
que se podan conectar directamente lasentradas de una a la salida
de otra sin tomar ningn tipo de precaucin. Inicialmente no eran ms
quecajas de plstico con un cierto nmero de patas que contenan un
circuito impreso con resistencias,diodos y transistores.
4.4 La lgica esttica integrada
Con la aparicin de los circuitos integrados las antiguas puertas
con circuitos compactos sesubstituyeron por circuitos integrados
con una mayor reduccin de volumen. Con el tiempo la mayorparte de
la lgica se redujo a dos familias: la TTL (a 5 volts) y la CMOS
(habitualmente a 12 volts).
-
Evolucin de los automatismos industriales 35
Se pueden encontrar circuitos integrados con las principales
funciones: puertas lgicas, biestables,temporizadores, contadores,
selectores, decodificadores, etc. Con la ventaja de que el volumen
ocupadopor el automatismo es menor que en todos los casos
anteriores.
Presenta dos inconvenientes importantes, por un lado la
necesidad de un cambio de niveles de tensiny por otro la
imposibilidad de modificacin; si es necesario hacer un cambio en el
automatismo hayque tirar el circuito impreso y hacer uno nuevo.
4.5 La lgica esttica programada
La lgica esttica permite compactificar mucho los circuitos pero
tiene el inconveniente, como yahemos visto, de la gran dificultad
de modificacin.
Para solucionar los problemas de la lgica esttica (y de la lgica
cableada) se usan los sistemasbasados en microprocesador que
permiten una mayor reduccin del circuito electrnico y que
seaprogramable; de esta forma la modificacin de las relaciones
lgicas es relativamente sencilla.
Contina presentando el inconveniente de la dificultad de
modificacin dado que aadir una entradao una salida adicional
implicar confeccionar un nuevo circuito impreso.
4.6 El ordenador de proceso
Como mejora de los sistemas basados en microprocesador aparece
el ordenador de proceso, parecidoal ordenador de gestin pero
preparado para funcionar en ambiente industrial y equipado con
entradasy salidas. Presenta la ventaja adicional de estar
capacitado para realizar clculos complejos.
Tiene un inconveniente importante derivado del hecho de
necesitar personal informtico pero conconocimientos de
automatizacin industrial y del proceso que se quiere automatizar
para suprogramacin.
4.7 El autmata programable industrial
Ante esta problemtica aparecieron los autmatas programables (o
PLC, Programable Logic Controller,controlador programable por
lgica). Inicialmente se concibieron como circuitos electrnicos
basadosen un microprocesador que tenan que funcionar como una lgica
esttica pero de manera que lasfunciones a realizar fuesen
programadas y, por tanto, fcilmente modificables.
A fin de que la programacin y el mantenimiento fuesen posibles
sin una formacin informtica delpersonal, la inmensa mayora de los
equipos permitan una programacin a base de reproducir undiagrama de
rels.
-
Definicin y arquitectura del autmata programable industrial
37
5 Definicin y arquitectura del autmata programable
industrial
5.1 Definicin histrica
Un autmata programable industrial es una mquina electrnica,
histricamente programable porpersonal no informtico, preparada para
realizar, en ambiente industrial, automatismos combinatoriosy
secuenciales en tiempo real.
Se trata, pues, de un ordenador pensado, tanto en los aspectos
de software como de hardware, parala automatizacin industrial.
Actualmente, dada la evolucin de estos equipos, a pesar de que
pueden ser programados por personalno informtico es conveniente que
el personal que tiene que hacerlo tenga unos ciertos
conocimientosde informtica.
5.2 Arquitectura
Un autmata programable consta (figura 21) de tres partes
fundamentales: Unidad de memoria, unidadde control y elementos de
entrada y salida.
5.2.1 Unidad de memoria
La memoria de un autmata programable sirve para almacenar el
programa y los datos del proceso.En muchos autmatas el usuario
puede trabajar con la configuracin de memoria base o puede aadirms
memoria (hasta un cierto lmite) en funcin de sus necesidades.
Dentro de la memoria de datos tenemos una parte fija que es la
tabla de imgenes de entradas ysalidas; cuya medida viene ya
definida mientras que el resto de la memoria de datos puede ser
variableen funcin de las necesidades de cada programa.
-
38 Automatismos elctricos programables
Fig. 21
Los autmatas pueden tener una asignacin de memoria fija es decir
que la parte destinada a programay la parte destinada a datos
(incluso el nmero de temporizadores, contadores, etc.) viene fijada
defbrica o con asignacin dinmica de la memoria de forma que a
medida que se va haciendo elprograma se asigna a cada necesidad la
parte requerida.
La memoria de programa tiene una parte fija: el sistema
operativo. Esta parte viene programada defbrica y es la que se
encarga de la lectura de entradas/salidas, efectuar el scan de
programa, gestionarlos posibles errores de funcionamiento, etc.
Tipos de memorias
Hay dos tipos bsicos de memoria: voltiles y no voltiles. Las
memorias voltiles se pueden leer,escribir y borrar fcilmente por el
propio programa. Tienen el inconveniente de que pierden
lainformacin grabada cuando se desconecta la alimentacin. Se llaman
memorias RAM Random AccessMemory (Memoria de acceso aleatorio).
En muchos casos se pone una pequea batera o un condensador que
alimenta exclusivamente lamemoria RAM cuando falla la alimentacin.
Segn los fabricantes, el programa y los datos puedenmantenerse
horas, das o aos.
-
Definicin y arquitectura del autmata programable industrial
39
Las memorias no voltiles pueden ser ledas a voluntad pero
difieren en la forma en que se puedenescribir. Todas ellas
mantienen la informacin aunque se pierda la alimentacin elctrica.
Acontinuacin hay una clasificacin de algunos tipos.
ROM Read Only Memory (Memoria de slo lectura). Es una memoria
que se programa enel momento de fabricacin y que puede ser leda
pero no escrita ni borrada.
PROM Programable ROM (ROM programable). Es una memoria que se
puede programarelctricamente en cualquier momento pero no se puede
borrar (slo se puede programar unavez).
EPROM Erasable PROM (PROM borrable). Se puede programar
elctricamente y borrar(todo el contenido de golpe) exponindola a
una luz UV un nmero muy elevado de veces.
EEPROM Electrically Erasable PROM (PROM borrable eltricamente).
Se programa y seborra (todo el contenido de una vez)
elctricamente.
EAROM Electrically Alterable ROM (ROM alterable elctricamente).
Se comporta como unamemoria RAM pero los datos no se pierden al
cortar la alimentacin. Es la nica memoriano voltil en que se puede
modificar una parte del contenido sin borrarla completamente.
5.2.2 Unidad de control
La unidad de control, tambin llamada CPU Central Processing Unit
(unidad central de proceso) esla parte inteligente del autmata. Su
funcin es ejecutar las instrucciones del programa. Tambin seencarga
de las comunicaciones con los equipos de programacin y de la gestin
de los estados deerror.
Su elemento base es el microprocesador. La capacidad de clculo y
la velocidad de procesamientodependen del nmero y tipo de
procesadores que tenga. La mayor parte de los autmatas tienen
unaCPU con un solo procesador pero cada vez hay ms que tienen las
funciones descentralizadas entrediversos procesadores a menudo
diferentes.
La ejecucin del programa sigue un ciclo llamado scan que
consiste en:
1. Lee las entradas y guarda sus estados en la tabla de imgenes
de entrada.
2. Hace una ejecucin del programa cogiendo los datos necesarios
de la tabla de entradas, loscontadores, los temporizadores, etc. y
dejando lo que convenga en la tabla de salidas,contadores, etc.
-
40 Automatismos elctricos programables
3. Copia la tabla de imgenes de salida sobre las salidas.
4. Vuelve a empezar el ciclo leyendo las entradas.
El uso de las tablas de entradas y salidas es muy importante. Si
las entradas se leyeran cada vez quese necesitan y las salidas se
escribieran tambin cada vez, resultara que una misma entrada que se
usams de una vez dentro de un scan de programa tendra estados
diferentes con lo que el automatismono funciona correctamente.
El programa se va repitiendo en forma cclica ya que las
modificaciones que vayan apareciendo en lasentradas tienen que ir
modificando los estados de los rels internos y las salidas.
5.2.3 Elementos de entrada y salida
Los elementos de entrada y salida son los que permiten comunicar
el autmata con el proceso que estcontrolando y con el operador.
Mediante los elementos de entrada el autmata se entera del estado
enque se encuentra el proceso (posiciones, velocidades, niveles,
temperaturas, elementos activados,elementos desactivados, etc.) a
partir de los captadores que el diseador ha situado para las seales
queinteresan. Los elementos de salida permiten que el PLC acte
sobre el proceso (electrovlvulas,motores, pilotos, etc.).
Elementos de entrada
Las entradas digitales son del tipo s/no, es decir reciben
seales de tipo cualitativo pero nocuantitativo. Por ejemplo un
termostato da una seal digital (temperatura mayor o menor que
22C).Las entradas digitales se corresponden con un bit en la tabla
de imgenes de entrada.
Las entradas de un autmata se clasifican segn el tipo y la
polaridad de conexin. Pueden ser decorriente alterna, de corriente
continua con comn positivo (tipo sink) y de corriente continua
concomn negativo (tipo source).
Los principales elementos que se conectan en este tipo de
entrada son:
a) Final de carrera. Es un elemento que detecta un objeto por
contacto fsico con el mismo.
b) Detectores de proximidad magnticos. Se coloca un rel Reed
cerca del lugar donde tiene quepasar la pieza a detectar, a la que
se le ha adosado un imn permanente. Cuando el imn pasecerca del rel
provocar el accionamiento del mismo.
-
Definicin y arquitectura del autmata programable industrial
41
c) Detectores de proximidad inductivos. Constan de un circuito
electrnico oscilante basado enuna inductancia que deja de oscilar
cuando sta se encuentra en las proximidades de una
piezametlica.
d) Detectores de proximidad capacitivos. Constan de un circuito
electrnico oscilante basado enun condensador que no oscila en
condiciones normales pero s cuando un objeto no metlicopasa cerca
suyo. A pesar de la descripcin, si se ajustan convenientemente,
tambin puedendetectar objetos metlicos.
e) Detectores de proximidad fotoelctricos de reflexin. Hay un
elemento que emite un haz deluz y lo tiene que volver a recibir. El
objeto a detectar tiene que reflectar el haz sobre eldetector.
f) Detectores de proximidad fotoelctricos de interposicin. Hay
un elemento que emite un hazde luz y otro que lo tiene que recibir.
El objeto a detectar tiene que interponerse entre elemisor y el
receptor. Se llaman reflex aquellos en que el emisor y el detector
estn juntos yel haz de luz se refleja en un reflector catadiptrico;
en este caso si hay posibilidades de queel objeto a detectar
refleje el rayo de luz es necesario usar haces polarizados dado que
losreflectores catadiptricos giran el plano de la luz.
Conviene distinguir entre aquellos captadores o detectores que
necesitan una alimentacin exterior parafuncionar (detectores de
tres hilos) y los que no necesitan (detectores de dos hilos). Entre
los detectoresde dos hilos distinguimos aquellos que se basan en un
sencillo contacto elctrico y los que llevancircuitera
electrnica.
Entre los detectores electrnicos de dos hilos podemos distinguir
entre los no polarizados (figura 22)que, con el mismo principio,
pueden funcionar en corriente continua o en corriente alterna (y
algunosindistintamente en corriente continua y corriente alterna) y
los polarizados (figura 23) que slo puedenfuncionar en corriente
continua y vigilando la polaridad de conexin.
Fig. 22
-
42 Automatismos elctricos programables
Fig. 23
Los captadores de dos hilos tienen la ventaja de que un mismo
tipo de captador se puede usar conautmatas diferentes. Es necesario
vigilar que la corriente residual (en estado abierto) que
necesitanpara funcionar no pueda activar la entrada del
autmata.
Los captadores de tres hilos no tienen corrientes residuales
pero necesitan alimentacin externa. Haydos tipos segn la lgica del
autmata donde se tienen que conectar. Los captadores de tipo
NPN(figura 24) se usan en autmatas con el negativo como comn de
entrada (tipo source) y los de tipoPNP (figura 25) se usan en
autmatas con el positivo como comn de entrada (tipo sink).
Fig. 24
Tambin hay posibilidades de entradas digitales codificadas como
pueden ser teclados, preselectoresdigitales, encoders, etc. Estos
elementos convierten seales de tipo numrico en un conjunto de
bitsen codificacin hexadecimal, BCD, etc.
Las entradas analgicas son capaces de aceptar seales de tensin o
corriente entre dos valores(0..10 V, -10..10 V, 4..20 mA, 0..20 mA)
y asociarles un nmero de 8, 10, etc. bits que indique elvalor ledo.
Se usan para la medida de temperaturas, presiones, caudales,
tensiones, corrientes, pares,etc.
-
Definicin y arquitectura del autmata programable industrial
43
Fig. 25
Conviene usar hilo trenzado y apantallado para las entradas
analgicas y corto circuitar aquellasentradas por tensin que no se
tengan que usar. Habitualmente la pantalla suele conectarse a
tierra enel lado del autmata (figura 26) y al negativo en el
extremo donde est el captador. En algunos casosse conecta a tierra
y al negativo en el extremo correspondiente al captador (figura 27)
pero es necesariovigilar que la tensin que puede haber entre los
dos negativos que entran en el autmata no supere ellmite admisible
(habitualmente de pocos volts).
Fig. 26
Fig. 27
-
44 Automatismos elctricos programables
Elementos de salida
Las salidas digitales tambin son de tipo s/no. En el caso de
salidas en corriente continua pueden serpor transistor o por rel
mientras que si la salida es en corriente alterna puede ser por
triac o por rel.
En las salidas por transistor, ste entra en conduccin cuando la
salida se activa. Son apropiadas paraaccionar elementos de pequea
potencia en corriente continua (electrovlvulas, contactores,
pilotos,etc.). Pueden ser con el negativo comn (tipo source) o con
el positivo comn (tipo sink).
En las salidas por triac, ste entra en conduccin cuando la
salida se activa. Cuando la salida sedesactiva el triac continuar
conduciendo hasta el primer paso por cero de la corriente. Por este
motivolas salidas por triac no funcionan en corriente continua.
Las salidas por rel son las ms verstiles ya que el usuario
dispone de un contacto de rel libre detensin (aislado de cualquier
otro circuito) de manera que cada salida puede accionar
elementosdiferentes a tensiones diferentes. Tienen el inconveniente
de que la velocidad de respuesta es pequea,por tanto, no pueden
usarse en aplicaciones que requieren cambios rpidos en las
salidas.
Tambin hay elementos de salida codificada como displays de 7
segmentos, displays alfanumricosy displays de mensajes.
Fig. 28
Las salidas analgicas pueden dar seales de tensin o de corriente
variables (0..10 V, -10..10 V, 4..20mA, 0..20 mA) que permiten
accionar vlvulas proporcionales, dar consignas a variadores de
velocidadpara motores, etc. Conviene usar hilo trenzado y
apantallado para las salidas analgicas. La pantallasuele conectarse
a tierra en el lado del autmata (figura 28) y al negativo en el
extremo donde est elpreaccionador dado que el negativo de las
diferentes salidas del mismo autmata suele ser comn.
-
Definicin y arquitectura del autmata programable industrial
45
5.2.4 Buses de comunicacin
Son el medio fsico a travs del cual el procesador se comunica
con el resto de elementos del sistema(entradas y salidas, memoria,
perifricos). Hay normalmente tres buses: Direcciones, datos y
control.Cada uno de ellos est formado por un conjunto de cables, o
mejor dicho un conjunto de pistas decircuito impreso. Cada uno de
los elementos conectados al bus tiene una direccin.
El bus de direcciones es por donde el procesador enva la
direccin del elemento al que quiere enviaro que quiere que le enve
informacin. Esta direccin llegar a todos los elementos pero slo
tiene quehaber un elemento que se identifique.
El bus de datos es por donde todos los elementos enviarn los
datos. En una escritura, el procesadorpondr los datos que quiere
que lea el elemento sealado con el bus de direcciones. En el caso
de unalectura, el procesador leer los datos que haya puesto el
elemento sealado. El bus de datos es, portanto, bidireccional.
El bus de control es aquel mediante el cual el procesador
explica qu operacin se est efectuando.Las operaciones ms corrientes
son leer y escribir.
5.3 Sistema operativo
El sistema operativo se encarga de ejecutar las funciones del
autmata, tanto si son en tiempo realcomo si no. En programas
sencillos se ejecutan todas las funciones dentro de un solo ciclo.
Enprogramas ms complejos nos podemos encontrar que el tiempo de
ejecucin sea inaceptable. En estoscasos a menudo se hace un
fraccionamiento del programa en mdulos (subrutinas) de manera que
notodos los mdulos se ejecutan en todos los ciclos.
Se encuentran tambin casos en los que se ejecuta una parte de
cada mdulo en cada ciclo deprograma. Este mtodo tiene serios
problemas de interpretacin de programas y depuracin ycorreccin de
errores de los mismos. Algunos autmatas incorporan ya subrutinas de
interrupcin portiempo que permiten ejecutar algunas partes de
programa cada un cierto tiempo.
-
Configuracin y programacin 47
6 Configuracin y programacin
6.1 Configuracin del mapa de memoria
Configurar el mapa de memoria quiere decir indicar, antes de
empezar la programacin, qu parte dela memoria se reserva para cada
cosa. Es necesario definir las direcciones donde se encontrarn la
tablade imgenes de entrada, la tabla de imgenes de salida, los rels
internos, los registros de control, lasvariables enteras, las
variables reales (coma flotante), los datos de contadores, los
datos detemporizadores, etc. No todos los autmatas tienen todos
estos tipos de registros, otros tienen ms.
Los rels internos son direcciones binarias que se usan como rels
que no afectan a las salidas pararealizar automatismos.
En algunos autmatas el mapa de memoria es fijo. En otros es
necesario configurarlo antes deprogramar o se autoconfigura
automticamente a medida que se va programando.
6.2 Lenguajes y sistemas de programacin
El tcnico que prepara un automatismo debe disear primero la
lgica que ste tiene que seguir y, unavez acabado el diseo, tiene
que explicarlo al autmata a fin de que ste pueda entenderlo y
llevarloa la prctica.
El mtodo que use para crear el automatismo no tiene ninguna
importancia mientras despus sea capazde traducirlo a alguna forma
inteligible para el autmata.
Los mtodos de entrar el automatismo al autmata (lenguajes de
programacin) son diversos. Acontinuacin describimos los ms
corrientes. En todos los casos pondremos como ejemplo el
mismoautomatismo (que en lgica cableada podramos definir con el
circuito de la figura 29) que correspondeal control de una puerta
automatizada para un edificio. En este ejemplo K1 ser el contactor
que haceabrir la puerta y K2 el que la hace cerrar. P ser el
detector situado debajo la alfombra y FdCO yFdCT son
respectivamente los finales de carrera de abrir y de cerrar.
-
48 Automatismos elctricos programables
Fig. 29
6.2.1 Diagrama de contactos
Tambin conocido como diagrama de rels, es la forma ms corriente
de programar un autmata. Setrata de hacer un esquema como si se
tuviese que hacer un automatismo con rels y esto se
entragrficamente en el software del autmata. Este lenguaje tiene la
ventaja de que los tcnicos demantenimiento estn acostumbrados a
dibujar circuitos lgicos con rels. En la mayor parte de losautmatas
el circuito se dibuja segn el mtodo americano en que los smbolos
son diferentes y laslneas lgicas van horizontales con las salidas a
la derecha, tal como se ve en la figura 30.
Fig. 30
6.2.2. Puertas lgicas
Consiste en hacer un esquema como si se tuviese que hacer un
automatismo electrnico. Este mtodotiene la ventaja de ser sencillo
para aquellos que han trabajado antes con puertas lgicas.
-
Configuracin y programacin 49
Fig. 31
6.2.3 Diagrama funcional
Consiste en hacer un circuito similar al de las puertas lgicas
pero con bloques funcionales. Lossmbolos que se usan habitualmente
en los bloques funcionales son:
& Funcin y (AND)1 Funcin o (OR)=1 Funcin o-exclusiva (EXOR)=
Funcin igual
Fig. 32
6.2.4 Diagrama de flujo
Es un mtodo parecido a los rboles de decisin que se usan tambin
en algortmica.
-
50 Automatismos elctricos programables
Fig. 33
Consta de cajas en forma de rombo y de rectngulo. Los rombos son
preguntas con respuesta s o noy los rectngulos son acciones.
6.2.5. GRAFCET
Fig. 34
-
Configuracin y programacin 51
El GRAFCET (Graphe de commande etape-transition, grafo de pedido
con etapas y transiciones) esun mtodo similar a los rboles de
decisin en que puede haber etapas simultneas (en paralelo). Antesde
cada etapa hay una transicin (figura 34).
En el GRAFCET las etapas se representan con cuadrados, que son
en lnea doble si se trata de etapasiniciales. Las acciones a
realizar en cada etapa se representan con rectngulos que salen
lateralmentede las etapas.
Las lneas simples son los caminos segn los cuales evoluciona el
automatismo y las dobles indicanque los caminos se bifurcan para
dar lugar a etapas en paralelo (simultneas).
Una rayita horizontal que cruza la lnea simple representa una
transicin. No se puede franquear latransicin hasta que no se ha
cumplido la condicin que se especifica en l.
6.2.6. Lenguaje booleano
Consiste en escribir directamente las ecuaciones booleanas que
representan el automatismo. En elejemplo que venimos representando
sera el de la figura 35.
Fig. 35
6.2.7. Lista de instrucciones
Se trata de describir las ecuaciones booleanas con una lista de
instrucciones de un solo operando. Cadaautmata tiene su forma
particular de hacerlo. Una podra ser la de la figura 36.
Fig. 36
LOAD K1OR PAND NOT FdCOOUT K1LOAD NOT PAND NOT FdCTAND NOT K1OUT
K2
-
52 Automatismos elctricos programables
6.2.8 Lenguajes de alto nivel
Hay autmatas que admiten programacin con lenguajes como BASIC o
PASCAL con la ventaja deque los lenguajes son muy parecidos a los
que se usan en la programacin de ordenadores. En algunosautmatas el
lenguaje es interpretado (no compilado) lo cual da lugar a tiempos
lentos de ejecucin.Un ejemplo en lenguaje BASIC podra ser el de la
figura 37.
Fig. 37
10 IF ((P OR K1) AND (NOT FdCO) AND (NOT K2)) THEN SET K1 ELSE
RES K1
20 IF ((NOT P) AND (NOT FdCT) AND (NOT K1)) THEN SET K2 ELSE RES
K2
c2: los autores, 1998; Edicions UPC, 1998.
linea:
f: c: los autores, 1998; Edicions UPC, 1998. Quedan
rigurosamente prohibidas, sin la autorizacin escrita de los
titulares del "copyright", bajo las sanciones establecidas en las
leyes, la reproduccin total o parcial de esta obra por cualquier
medio o procedimiento, comprendidos la reprografa y el tratamiento
informtico, y la distribucin de ejemplares de ella mediante
alquiler o prstamo pblicos, as como la exportacin e importacin de
ejemplares para su distribucin y venta fuera del mbito de la Unin
Europea.