Embed Size (px)
Citation preview
筑波大学大学院博士課程 システム情報工学研究科修士論文
トロンボーン自動吹鳴装置の開発
金 子 昌 弘
(知能機能システム専攻)
指導教官 永井啓之亮
2 0 0 5 年 1 月
目 次
第 1 章 序 論 2
1.1 研究の背景 1.2 研究の目的 1.3 研究の概要
第 2 章 自動演奏装置 5
2.1 管楽器の発音機構 2.2 トロンボーンの発音機構 2.3 トロンボーン自動演奏装置
第 3 章 アンブシュアの制御 13
3.1 人 工 口 3.2 人工吹鳴装置 3.3 トロンボーン吹鳴実験
第 4 章 スライド長の制御 22
4.1 制御システム 4.2 スライド長制御装置 4.2 スライド長制御実験
第 5 章 結 論 38
謝 辞 40 参考文献 41
1
第1章 序 論
1.1 研究の背景
音楽は昔から人々に親しまれている。音楽だけでなく、狩猟の合図や戦争の
合図にも使用されていた。ルネサンスの時代に入ると次第に楽器の改良が進む
ようになったが、楽器の改良は経験的なもので、理論に基づいたものではなか
った。現在に至るまでに様々な楽器が作られ、多くの楽器が使われなくなった[1]。
今日、楽器の科学的解析が行われるようになったが[2]、解析の困難ないくつか
の要因が楽器の重要な要素であるため、相変わらず楽器の設計は経験を基にし
た、古来の方法のままである[3]。
楽器は発音の仕組みによって大きく、擦弦楽器、管楽器、打楽器の 3 種類に
分けられる。擦弦楽器はヴァイオリン・ギター・チェンバロなどがあり、弦を
擦ったり引っかいたりすることで発音する。管楽器はフルート・ホルン・尺八
などがあり、楽器に息を吹き込み、リードを振動させることで発音をする。打
楽器は、ケルトドラム・トライアングル・ビブラフォンなどがあり、楽器の本
体を叩くことで発音をする。これらの楽器のなかで、最も発音しにくい楽器は
管楽器であり、その中では金管楽器である。なぜなら、この楽器は人間の体を
発音に用いているからである。金管楽器奏者は演奏する音の周波数に合わせて
自分の唇を調節しなければならない。また、金管楽器で高音を演奏するには唇
に非常に大きな張力をつくらなければならないし、唇の筋力の高度な調節を必
要とする。例えば、ホルンで高音を演奏しようとすると半音のピッチ、つまり
周波数にして 6%程度のわずかな周波数の調整を必要とされる[4]。さらに、体調
や唇の状態が楽器の音に影響を与える。このように金管楽器は高度な唇の筋肉
の調整が要求され、非常に演奏の難しい楽器であるといえる。
2
人でさえ演奏するのが難しい楽器を人に代わって機械が楽器を演奏するのは
更に難しい。どのように操作すれば音が出せるのかがわかっていなければ、機
械で演奏させることはできない。そのため、自動演奏が早くに行われたのは鍵
盤楽器である。鍵盤楽器は音高が 1 対 1 の鍵盤の位置関数となっているため、
発音を機械的に制御するのが容易であることがその理由である。擦弦楽器や管
楽器は最近になってようやく研究がでてきた程度である[5-7]。これらの楽器の
自動演奏が行われなかったのは、発音の制御関数が明確にされていないからで
ある。ピアノと違い、トロンボーンの制御関数に関わってくる要素は唇の振動
である。唇の振動は複雑であり、多くの研究がなされている[7-11]が、自動演奏
に至ったものは少ない。トロンボーンの自動演奏についての研究は楽器の設計
だけでなく、物理学としても重要なテーマであると言える。
1.2 研究の目的
トロンボーンの自動演奏装置を開発するために、吹鳴の 3 要素をそれぞれ制
御する機構を開発する。また、アンブシュアに関してはどのようなパラメータ
で構成されているかわかっていないため、パラメータを特定し、制御すること
を本研究の目的とする。
1.3 研究の概要
楽器は昔から人間の生活に密着していたが、複雑な振る舞いをするためにど
うしたら発音できるのかわかっていない。そこで本論文では、トロンボーンの
自動演奏装置を最終目標として吹鳴の制御関数を明らかにすることを最終目標
として研究を行った。トロンボーンの吹鳴は大きく 3 つの要素で成り立ってい
る。人工口を用いた人工吹鳴実験結果から、その要素の1つであるアンブシュ
3
アのパラメータが唇間の幅であることを特定した。また、吹鳴音のフィードバ
ックにより、トロンボーンスライド長を制御した。リアルタイム処理を行った
ため、吹鳴音の周波数スペクトル分解能が 10 Hz 程度と低かった。しかし、スペ
クトルピーク前後の比率を用いた補間により最大誤差 0.6 mHz と十分な精度を
得ることができ、吹鳴周波数と目標周波数の 5 Hz のずれを 1 s から 2 s で制御す
ることができた。アンブシュアのパラメータを1つ特定でき、正確な音高で吹
鳴できる人工吹鳴装置ができたので、人間の吹鳴に近づいたといえる。
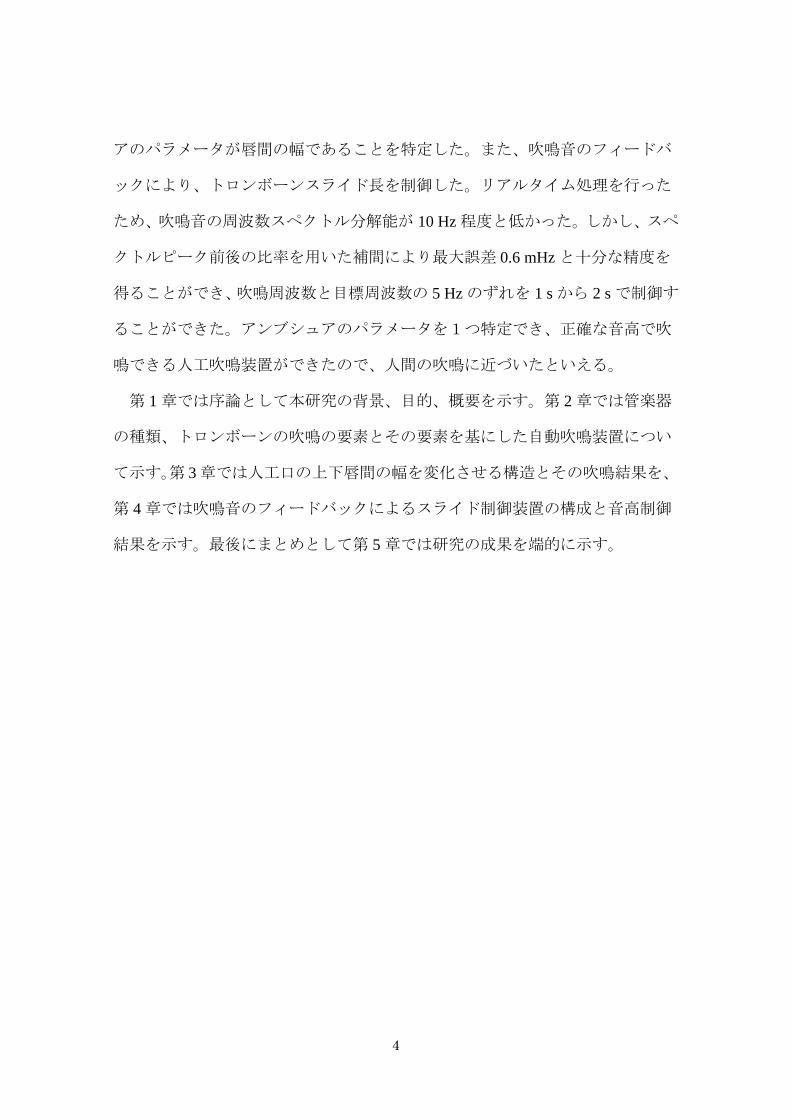
第 1 章では序論として本研究の背景、目的、概要を示す。第 2 章では管楽器
の種類、トロンボーンの吹鳴の要素とその要素を基にした自動吹鳴装置につい
て示す。第 3 章では人工口の上下唇間の幅を変化させる構造とその吹鳴結果を、
第 4 章では吹鳴音のフィードバックによるスライド制御装置の構成と音高制御
結果を示す。最後にまとめとして第 5 章では研究の成果を端的に示す。
4
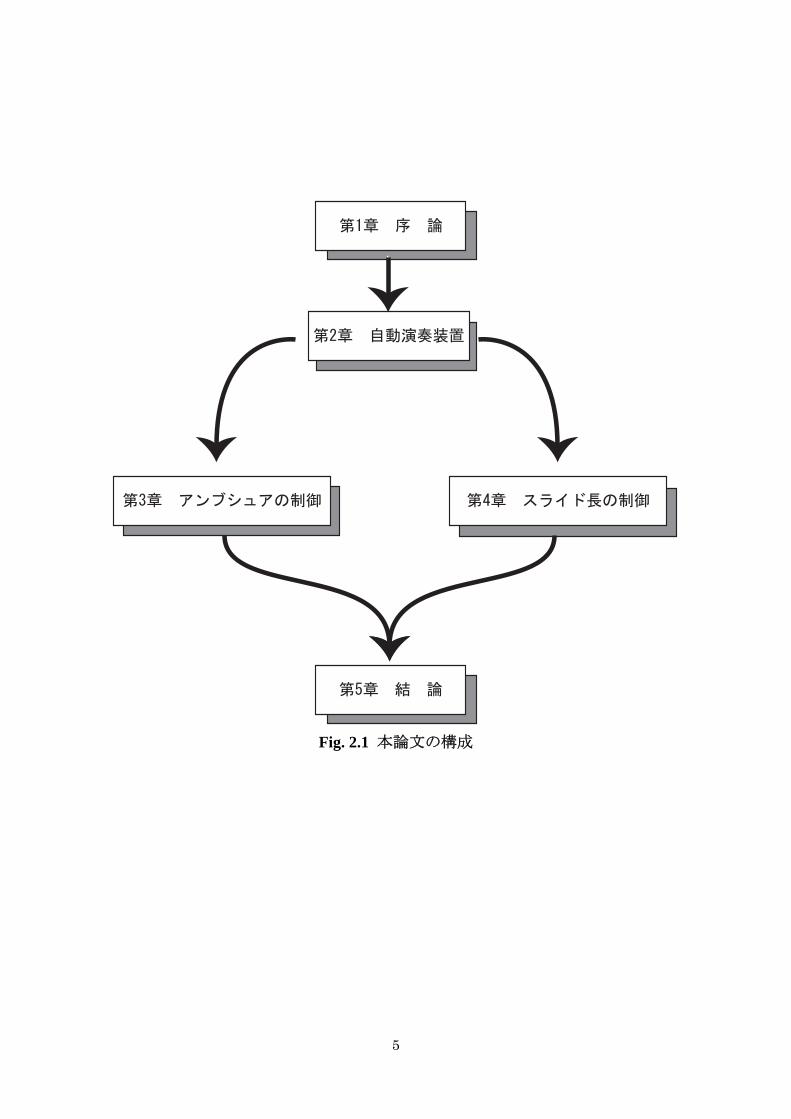
Fig. 2.1 本論文の構成
5
第2章 自動演奏装置 2.1 まえがき
本章では管楽器の発音機構について説明してから、トロンボーンの吹鳴の要
素について説明する。トロンボーンが 3 つの要素で吹鳴することができること
を示した後、吹鳴の要素を元にしたトロンボーンの自動演奏装置について示す。
2.2 管楽器の発音機構C
管楽器は材質によって金管楽器と木管楽器に分けられる。現在、木管楽器は
必ずしも木製ではないが、いずれも原型は木製である。管楽器は発音方法で分
けると次の4つに分類できる。発音体の形状が複雑な順で述べる。
2.2.1 木管楽器
(a) クラリネット型
リードが 1 枚でできており、呼気圧がかかるとリードが閉まるように変移する。
サキソフォンも同じ発音機構である。
Fig. 2.2 クラリネットとマウスピース
(b) オーボエ型
リードが 2 枚でできており、呼気圧がかかるとリードが閉まるように変移す
る。バスーンや篳篥(ひちりき)も同じ発音方法である。
6

Fig. 2.3 ファゴットとリード
(c)フルート型
楽器にリードが無く、奏者の吹き込む息がリードの役割を果たす。奏者の呼気
が楽器のエッジに当たることで、気流が振動を起こす。リコーダーや尺八が同
じ発音方法である。
Fig. 2.4 フルートとマウスピース
2.2.2 金管楽器
(d)金管楽器型
楽器にリードが無く、奏者の唇がリードの役割を果たす。奏者の呼気圧が唇を
押し開けるように変移することで、音を作る。本稿で扱っているトロンボーン
はこの分類に入る。
Fig. 2. 5 フレンチ・ホルンとマウスピース
7
2.3 トロンボーンの発音機構
2.3.1 吹鳴の要素
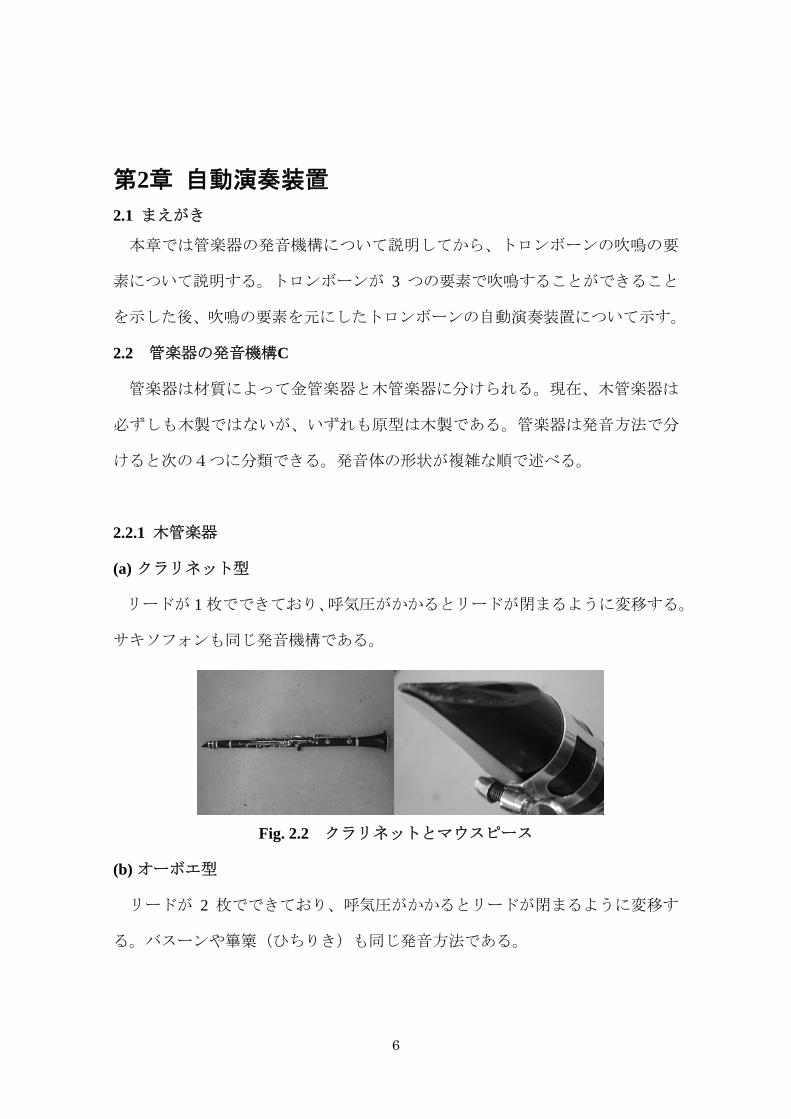
トロンボーンを吹鳴するためには息の圧力、楽器管の長さ、アンブシュアの 3
つの要素が必要であると言われている。Fig. 2.6 は金管楽器の発音機構のモデル
を表している。奏者が息を吹き込むと唇が振動を始める。この段階では唇は息
によって強制的に振動させられている。唇の振動が楽器内の空気を通してベル
にまで到達したときに、インピーダンスの違いから音の反射が起こる。反射し
て唇まで戻ってきた音は唇の振動を増幅させる働きをする。その結果唇の振動
は安定し、この繰り返しにより唇の振動は大きく増幅され、金管楽器特有の大
きな音になるのである[11]。
oral cavitybreath
mouthpiece
horn
toothlips
belltone
Fig. 2.6 金管楽器の発音機構モデル
8
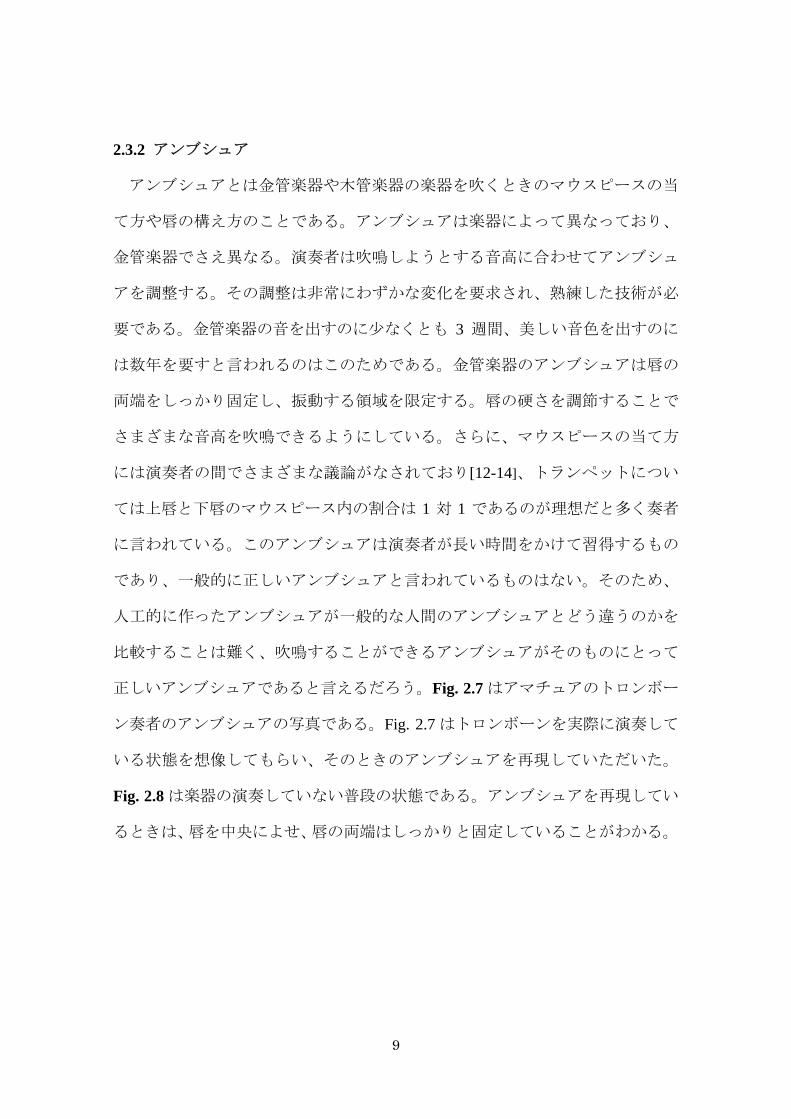
2.3.2 アンブシュア
アンブシュアとは金管楽器や木管楽器の楽器を吹くときのマウスピースの当
て方や唇の構え方のことである。アンブシュアは楽器によって異なっており、
金管楽器でさえ異なる。演奏者は吹鳴しようとする音高に合わせてアンブシュ
アを調整する。その調整は非常にわずかな変化を要求され、熟練した技術が必
要である。金管楽器の音を出すのに少なくとも 3 週間、美しい音色を出すのに
は数年を要すと言われるのはこのためである。金管楽器のアンブシュアは唇の
両端をしっかり固定し、振動する領域を限定する。唇の硬さを調節することで
さまざまな音高を吹鳴できるようにしている。さらに、マウスピースの当て方
には演奏者の間でさまざまな議論がなされており[12-14]、トランペットについ
ては上唇と下唇のマウスピース内の割合は 1 対 1 であるのが理想だと多く奏者
に言われている。このアンブシュアは演奏者が長い時間をかけて習得するもの
であり、一般的に正しいアンブシュアと言われているものはない。そのため、
人工的に作ったアンブシュアが一般的な人間のアンブシュアとどう違うのかを
比較することは難く、吹鳴することができるアンブシュアがそのものにとって
正しいアンブシュアであると言えるだろう。Fig. 2.7 はアマチュアのトロンボー
ン奏者のアンブシュアの写真である。Fig. 2.7 はトロンボーンを実際に演奏して
いる状態を想像してもらい、そのときのアンブシュアを再現していただいた。
Fig. 2.8 は楽器の演奏していない普段の状態である。アンブシュアを再現してい
るときは、唇を中央によせ、唇の両端はしっかりと固定していることがわかる。
9

Fig. 2.7 楽器を吹くときの状態
Fig. 2.8 楽器を吹かないときの状態
10
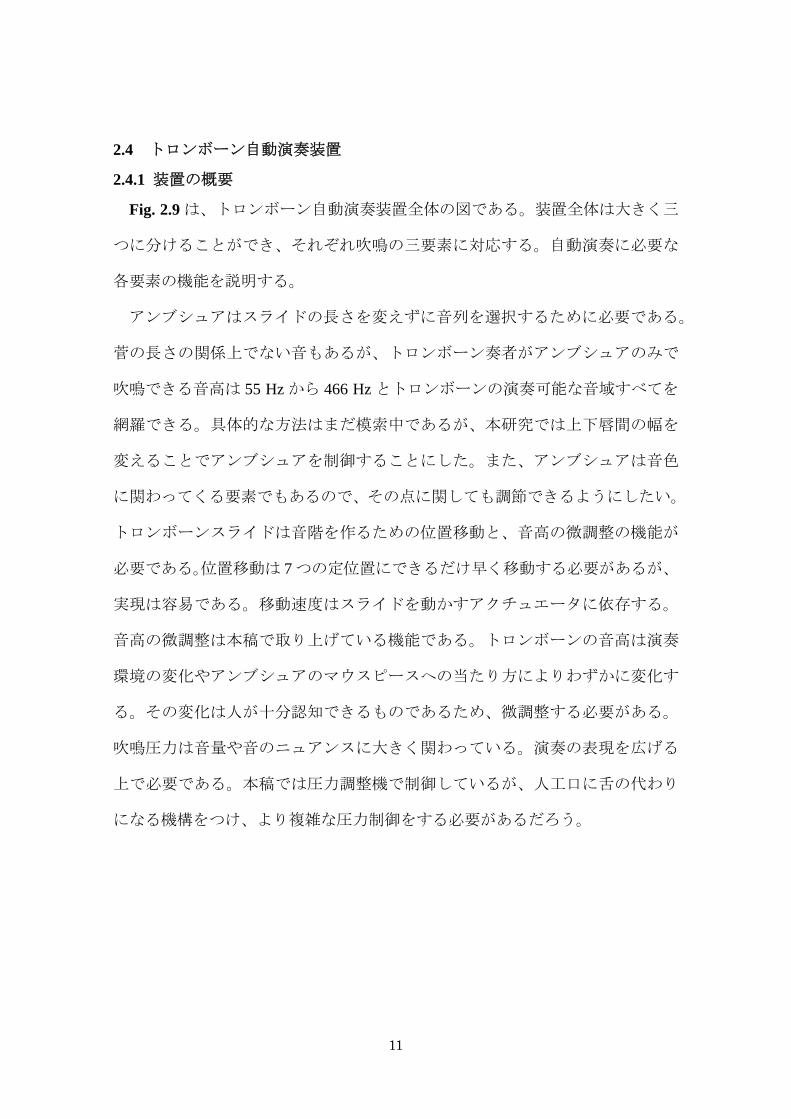
2.4 トロンボーン自動演奏装置
2.4.1 装置の概要
Fig. 2.9 は、トロンボーン自動演奏装置全体の図である。装置全体は大きく三
つに分けることができ、それぞれ吹鳴の三要素に対応する。自動演奏に必要な
各要素の機能を説明する。
アンブシュアはスライドの長さを変えずに音列を選択するために必要である。
菅の長さの関係上でない音もあるが、トロンボーン奏者がアンブシュアのみで
吹鳴できる音高は 55 Hz から 466 Hz とトロンボーンの演奏可能な音域すべてを
網羅できる。具体的な方法はまだ模索中であるが、本研究では上下唇間の幅を
変えることでアンブシュアを制御することにした。また、アンブシュアは音色
に関わってくる要素でもあるので、その点に関しても調節できるようにしたい。
トロンボーンスライドは音階を作るための位置移動と、音高の微調整の機能が
必要である。位置移動は 7 つの定位置にできるだけ早く移動する必要があるが、
実現は容易である。移動速度はスライドを動かすアクチュエータに依存する。
音高の微調整は本稿で取り上げている機能である。トロンボーンの音高は演奏
環境の変化やアンブシュアのマウスピースへの当たり方によりわずかに変化す
る。その変化は人が十分認知できるものであるため、微調整する必要がある。
吹鳴圧力は音量や音のニュアンスに大きく関わっている。演奏の表現を広げる
上で必要である。本稿では圧力調整機で制御しているが、人工口に舌の代わり
になる機構をつけ、より複雑な圧力制御をする必要があるだろう。
11

2.4.2 動作の概要
① コンプレッサから送られた圧力は圧力調整機で 10 kPa に調節される。
② 人工口に圧力が送られ、吹鳴が始まる。
③ P.C.で吹鳴音を処理し、スライドやアンブシュア、圧力の制御をする。
④ P.C.から送られてきた指令をアクチュエータに伝え、スライドを制御する。
P.C.
air compressorrpressure regulator
linear actuator
microphonetrombone
artificial l
A-D/D-A converter
r
motor drivermotor drive
function generator
GPIB
pressure control system
artificial mouth
pitch control s stempitch control system
automatic blower
Fig. 2.9 トロンボーン自動吹鳴装置全体
12

第 3 章 アンブシュアの制御
3.1 人工口
3.1.1 人工口作製の目的
Fig. 3.1 は小堀らがトロンボーン自動演奏装置で使用していた人工口である
[15]。この人工口を用いて自動演奏のための基礎的な実験を行っていた。しかし
ながら、この唇は厚さ 2 mm の板状のシリコン(信越化学工業 KE-116/RTV シン
ナーの混入率 0.75 %)に空気がながれるよう切り口を入れたもので、アンブシュ
アの制御ができない。アンブシュアの制御ができないので、吹鳴できる音域を
広げることができない。そのため、自動演奏には向かない唇である。そこでア
ンブシュアの制御のできる人工口を作製することにした。
Fig. 3.1 開発前に使用していた人工口
13

3.1.2 人工口の開発
2 章で説明したようにアンブシュアは唇の両端をしっかり固定し、振動する領
域を限定することが一般的であると言われている。実際、多くの演奏者がこれ
に近いことを意識してアンブシュアを形作っている。アンブシュアは各音に適
したものがあると言われており、演奏者は唇の硬さや唇間の幅を変えることで、
各音に適したアンブシュアにしている。唇の硬さは材質そのものの硬さを変え
ることになり、簡単には実現できそうにない。そこで、まず唇間の幅を変える
ことでアンブシュアを変え、音を制御できないだろうかと考えた。Fig.3.2 は、
本稿で使用した人工口のアンブシュアを変える機構の図である[16-18]。中央の
スライドを動かすことで、唇間の幅を変えることができる仕組みになっている。
この機構をシート状のゲルで包み、人工の唇とした。
Fig. 3.2 唇間の幅を調整する機構
14
3.2 人工吹鳴装置
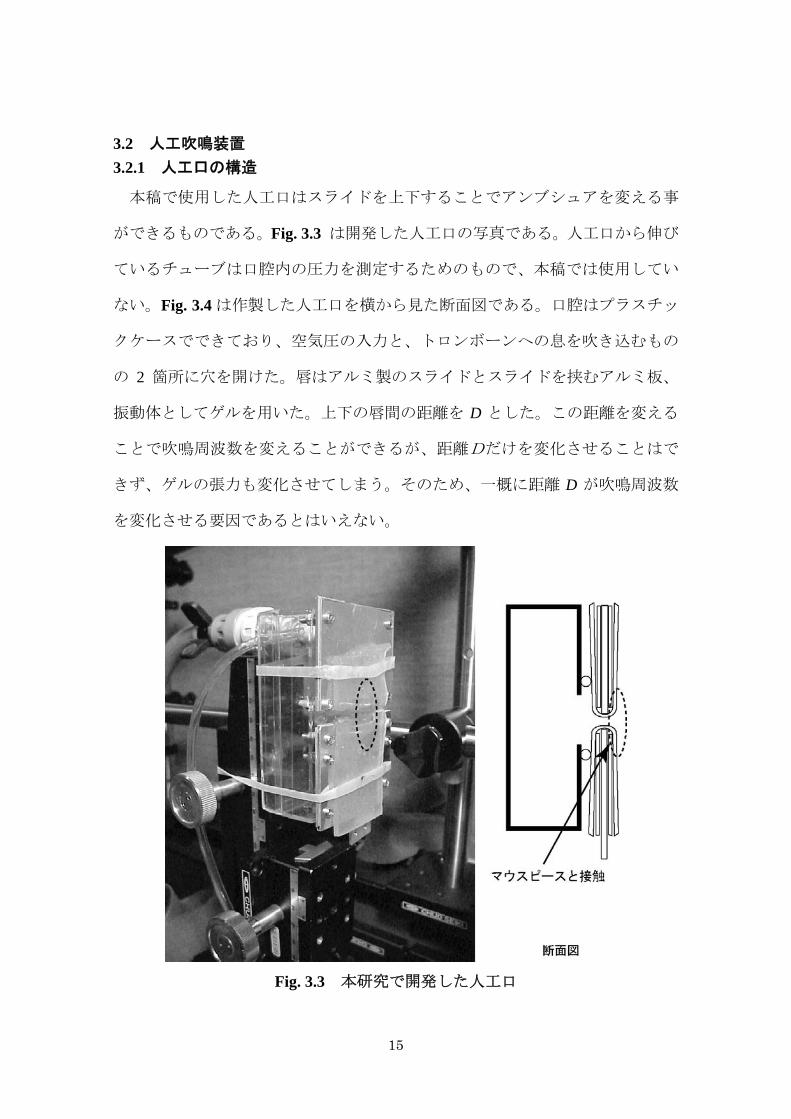
3.2.1 人工口の構造
本稿で使用した人工口はスライドを上下することでアンブシュアを変える事
ができるものである。Fig. 3.3 は開発した人工口の写真である。人工口から伸び
ているチューブは口腔内の圧力を測定するためのもので、本稿では使用してい
ない。Fig. 3.4 は作製した人工口を横から見た断面図である。口腔はプラスチッ
クケースでできており、空気圧の入力と、トロンボーンへの息を吹き込むもの
の 2 箇所に穴を開けた。唇はアルミ製のスライドとスライドを挟むアルミ板、
振動体としてゲルを用いた。上下の唇間の距離を D とした。この距離を変える
ことで吹鳴周波数を変えることができるが、距離Dだけを変化させることはで
きず、ゲルの張力も変化させてしまう。そのため、一概に距離 D が吹鳴周波数
を変化させる要因であるとはいえない。
Fig. 3.3 本研究で開発した人工口
15
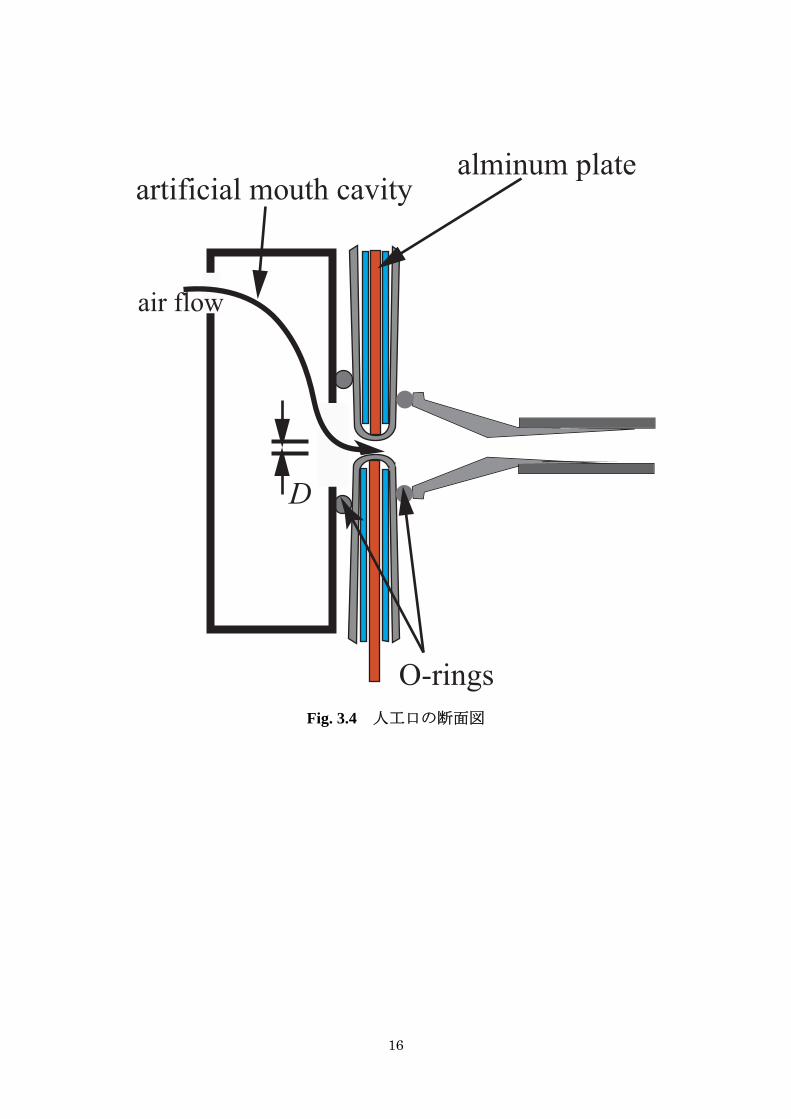
alminum plateartificial mouth cavity
D
O-rings
Fig. 3.4 人工口の断面図
16
3.2.2 人工吹鳴装置
(装置の構成)
本稿で使用した実験装置の模式図をFig. 3.4 に示す。最大圧力 7 kg/cm2である
エアーコンプレッサから送り出される空気圧は一度圧力調整機(ITV3011-313S5 /
SMC)を経て、適切な圧力に調整してから人工口へ供給する。人工口によって発
音された音は、トロンボーンのベルの正面に配置したマイクロフォン(C-355 /
SONY)からA-Dコンバータ(DAQ-6062E / National Instruments)により 250 kHzでサ
ンプリングされPC(Celeron 1.06 GHz 384 MB-RAM)で記録される。トロンボー
ン本体はスライドを除き、動かないよう金属製のレール上に固定されている。
また、人工口もトロンボーンと同じレール上に固定されており、吹鳴を繰り返
してもマウスピースと人工口の接触位置は同じである
(装置の動作)
① コンプレッサから圧力調整機に圧力が送られ、10 kPa に調整される。
② 人工口に送られてきた圧力により、吹鳴が始まる。
③ マイクロフォンから取り込まれた音は P.C.によって記録される。
17

P.C.
air compressorpressure regulator
microphonetrombone
artificial lips
A-D/D-A converter
pressure control system
artificial mouth
Fig. 3.4 人工吹鳴装置
18
3.3 トロンボーン吹鳴実験 3.3.1 実験の目的
人工口の吹鳴が人の吹鳴音とどの程度似ているのか、自動演奏できるもので
あるのかを調べる。さらに吹鳴の要素であるアンブシュアのパラメータとして
唇間の幅が有効であるかどうか確認をする。
3.3.2 実験結果
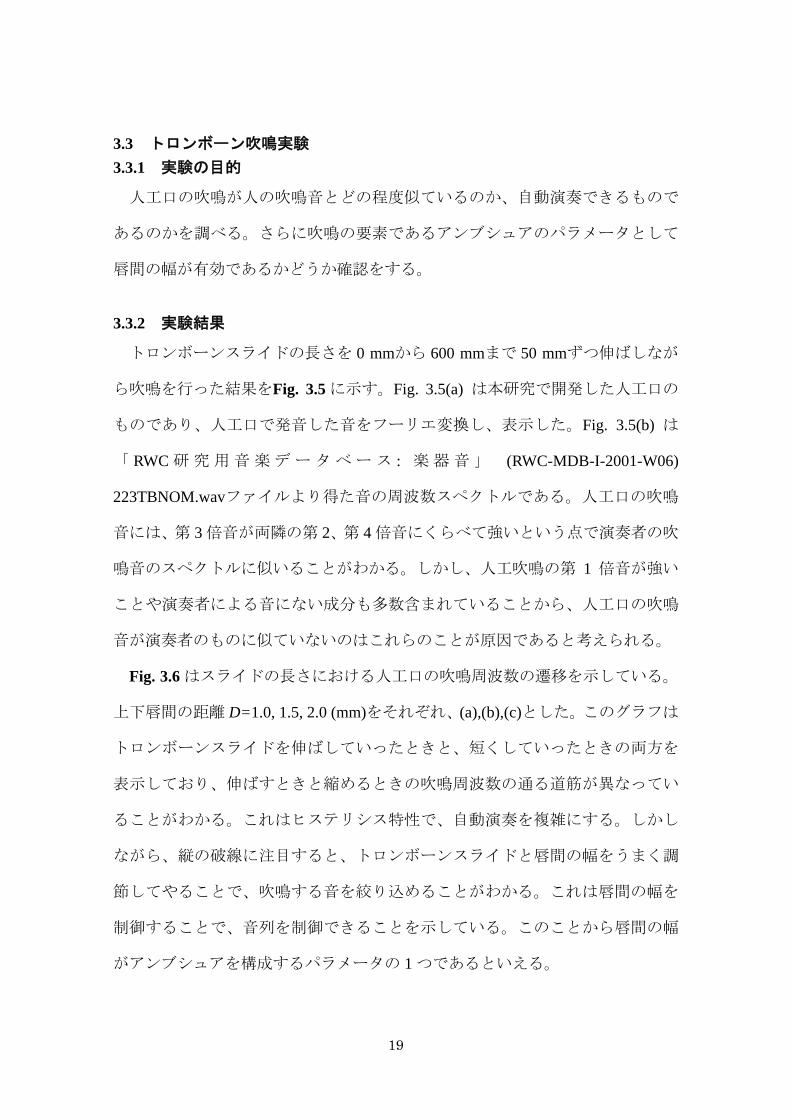
トロンボーンスライドの長さを 0 mmから 600 mmまで 50 mmずつ伸ばしなが
ら吹鳴を行った結果をFig. 3.5 に示す。Fig. 3.5(a) は本研究で開発した人工口の
ものであり、人工口で発音した音をフーリエ変換し、表示した。Fig. 3.5(b) は
「 RWC 研 究 用 音 楽 デ ー タ ベ ー ス : 楽 器 音 」 (RWC-MDB-I-2001-W06)
223TBNOM.wavファイルより得た音の周波数スペクトルである。人工口の吹鳴
音には、第 3 倍音が両隣の第 2、第 4 倍音にくらべて強いという点で演奏者の吹
鳴音のスペクトルに似いることがわかる。しかし、人工吹鳴の第 1 倍音が強い
ことや演奏者による音にない成分も多数含まれていることから、人工口の吹鳴
音が演奏者のものに似ていないのはこれらのことが原因であると考えられる。
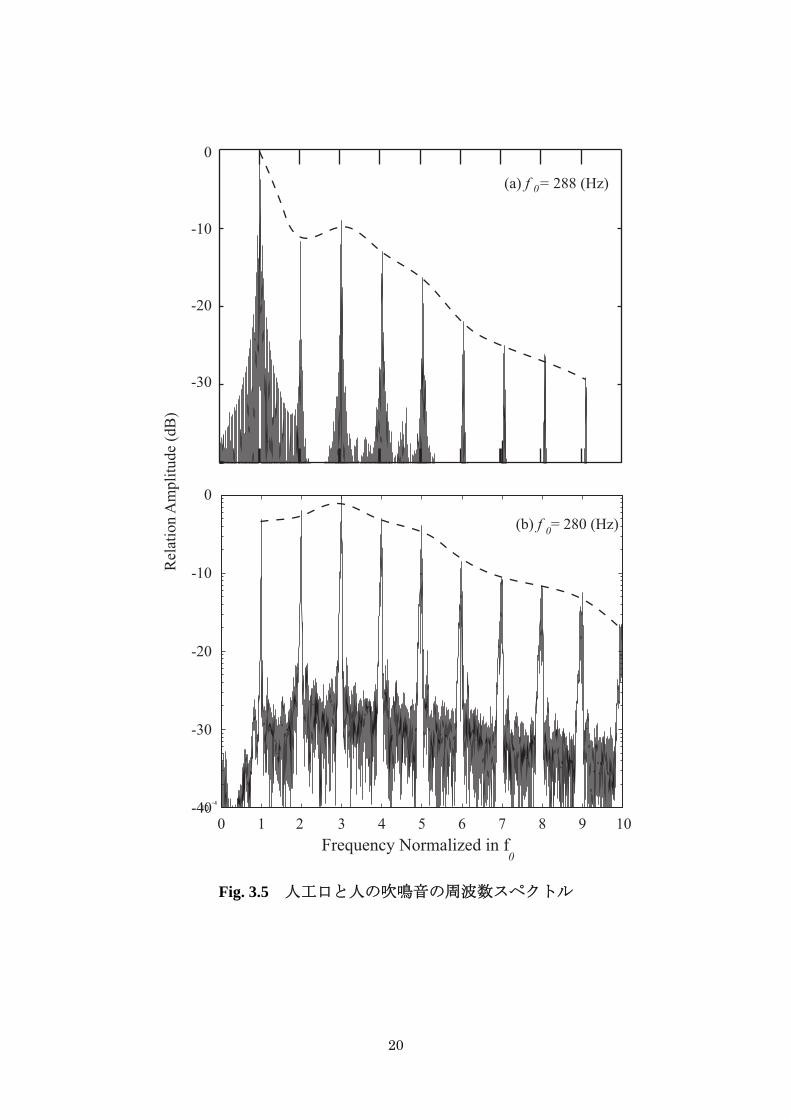
Fig. 3.6 はスライドの長さにおける人工口の吹鳴周波数の遷移を示している。
上下唇間の距離 D=1.0, 1.5, 2.0 (mm)をそれぞれ、(a),(b),(c)とした。このグラフは
トロンボーンスライドを伸ばしていったときと、短くしていったときの両方を
表示しており、伸ばすときと縮めるときの吹鳴周波数の通る道筋が異なってい
ることがわかる。これはヒステリシス特性で、自動演奏を複雑にする。しかし
ながら、縦の破線に注目すると、トロンボーンスライドと唇間の幅をうまく調
節してやることで、吹鳴する音を絞り込めることがわかる。これは唇間の幅を
制御することで、音列を制御できることを示している。このことから唇間の幅
がアンブシュアを構成するパラメータの 1 つであるといえる。
19
Rel
atio
n A
mpli
tude
(dB
)
Frequency Normalized in f 0
-30
-20
-10
0
(a) f 0= 288 (Hz)
-30
-20
-10
0
0 1 2 3 4 5 6 7 8 9-40
(b) f 0= 280 (Hz)
10
Fig. 3.5 人工口と人の吹鳴音の周波数スペクトル
20
Blo
win
g F
requen
cy (
Hz)
Slide Length: L (mm)
200
300
400
(a) D = 1.0 mm
200
300
400
(b) D = 1.5 mm
0 100 200 300 400 500 600200
300
400
(c) D = 2.0 mm
Fig. 3.6 スライド長に対応した吹鳴周波数の遷移
21

第 4 章 スライド長の制御
4.1 制御システム
4.1.1 制御ブロック
Trombone
ft K
fb
+−fd = K(ft-fb)
Slide
Fig. 4.1 自動音高制御ブロック図
自動音高制御装置のブロック図をFig. 4.1 に示す。人工口を用いて発音したト
ロンボーンの吹鳴音の音高fbは、フィードバック制御を用いて目標値の周波数ft
に自動で調整される。吹鳴音の周波数と目標の周波数との差がトロンボーンの
スライドの移動速度を決める。スライドの移動速度は、2つの音高の差に比例
する。自動音高制御装置のリニアアクチュエータシステムは入力パルスの周波
数で移動速度が決まり、入力する周波数は2つの音高を用いて次のように決定
する。
)( btd ffKf −= . (4.1)
ここで、Kは比例定数である。スライドはfdの値が正のとき伸び、負のとき縮む。
fd = 0 であれば、スライドは停止する。
22

4.1.2 基本周波数の推定
信号 x の DFT は次のように記述される。
( ) (∑−
=
−=1
0exp)(
N
nk TjnnTxG ωω )
(4.2)
ここで、Nはサンプル数であり、Tはサンプリング周期である。離散フーリエ変
換の周波数解像度は観測時間によって決まる。G(ωk)の周波数スペクトルは次の
ような周波数の倍数で構成される。
NTk
kπω 2
= , . (4.3) ),2,1,0( L±±=k
ここで、NTは観測時間である。実時間で処理をすることを考えるとサンプリン
グ周期が短く、サンプル数は少ないほうがよい。しかしながらそのような場合、
音高を制御するのに十分な周波数分解能を得ることができない。例えば、T=
0.01s、N=10 とすると周波数分解能は 10 Hzとなり、音高を精密に制御すること
はできない。このように分解能が低い状態で周波数スペクトル上にピークがあ
るとき、必ずしもピークの周波数ωkが真のピークとは限らない。そこで、周波
数スペクトルを補間することで真のピークを推定することにした。
23

4.1.3 二次関数を用いる推定方法について
f(k-1), f(k), f(k+1)の 3点を通るような二次関数H(k)を考える。ただし、f(k)> f(k-1),
f(k)> f(k+1)とする。この関数 H(k)は次の式で表す。
cbkakkH ++= 2)( , (4.4)
ただし、a, b, c はそれぞれ定数とする。この関数に f(k-1), f(k), f(k+1)を代入する
と、
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
+
−=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
+++
−+−
)1()(
)1(
111211112
2
2
2
kfkf
kf
cba
kkkkk
kkk
, (4.5)
と表せる。この連立方程式を Cramer の公式により解くと
( )1()1()(221
−−+−−= kfkfkfa ) (4.6)
( ))1()12()1()12()(421
+−+−++−−= kfkkfkkkfb (4.7)
L=c
となる。
よって、二次関数 H(k)の軸は
)1()1()(2)1()12()1()1()(4
21
2 −−+−+−−−+−
=−=kfkfkf
kfkkfskkkfa
bk (4.8)
となる。したがってピークの周波数はデータ数を N、サンプリング周期を T と
すると、
NTkf 1−
=
( )1≥k (4.9)
となる。
24
4.1.3 比率を用いる推定方法について
次に比率を用いる基本周波数の推定について説明する。スペクトルの補間に
は FFT を用いる高精度周波数決定法[19]を用いた。ハニング窓を使用した信号 x
の DFT は次のように記述される。
( ) (∑−
=
−=1
0exp)()(
N
nkh TjnnTxnwG ωω ) , (4.10)
⎟⎠⎞
⎜⎝⎛−=
Nnnw π2cos1)( . (4.11)
ピークの周波数をkmax、推定周波数をkeとする。G(kmax-1),G(kmax),G(kmax+1)の比を
用いて補間式は次のように表すことができる。
G(k-max-1)>G(kmax+1)の場合
rrkke +
−+=
121
max ただし )(
)1(
max
max
kGkG
r−
= (4.12)
G(k-max-1)≦G(kmax+1)の場合
sskke +
−−=
121
max ただし )(
)1(
max
max
kGkG
s+
= . (4.13)
ここで、kmaxはスペクトルG(ω)の各ピークの周波数を表している。ピークの周
波数はデータ数をN、サンプリング周期をTとすると、
NTk
f e 1−=
( )1≥ek
(4.14)
となる。
25
4.1.4 周波数補間の精度比較と考察
二次関数と比率を用いる補間法の精度を正弦波の周波数スペクトルを補間す
ることで比較した。入力信号である正弦波を周波数 100 Hzから 500 Hzまで 1 Hz
刻みで変える。観測時間NTは 0.1 sとしたので、周波数分解能は 10 Hzである。
Fig. 4.2 は入力信号の周波数と推定結果の差を表したものである。実線は比率を
用いる補間法、破線は二次関数を用いた補間法である。破線が±2 Hzの間で振動
しているのに対し、実線はほとんど 0 Hzで静止している。これは入力周波数と
推定周波数がほぼ一致しているということであり、明らかに比率を用いる補間
法の方が精度よく推定が行えていることがわかる。Fig. 4.3 は比率を用いる補間
法による誤差のみを現したグラフである。周波数が低いほど精度が悪いことが
わかるが、悪くても分解能 10 Hzに対して 0.6 mHz程度の誤差しかなく、十分な
精度で補完できている。
26

100 150 200 250 300 350 400 450 500
-2
-1
0
1
2
3
Frequency (Hz)
Err
or
(Hz)
Fig. 4.2 正弦波の周波数推定誤差
100 150 200 250 300 350 400 450 500
0
0.2
-0.2
0.4
0.6
0.8
Frequency (Hz)
Err
or
(mH
z)
Fig. 4.3 比率を用いる補間法の周波数推定誤差
27

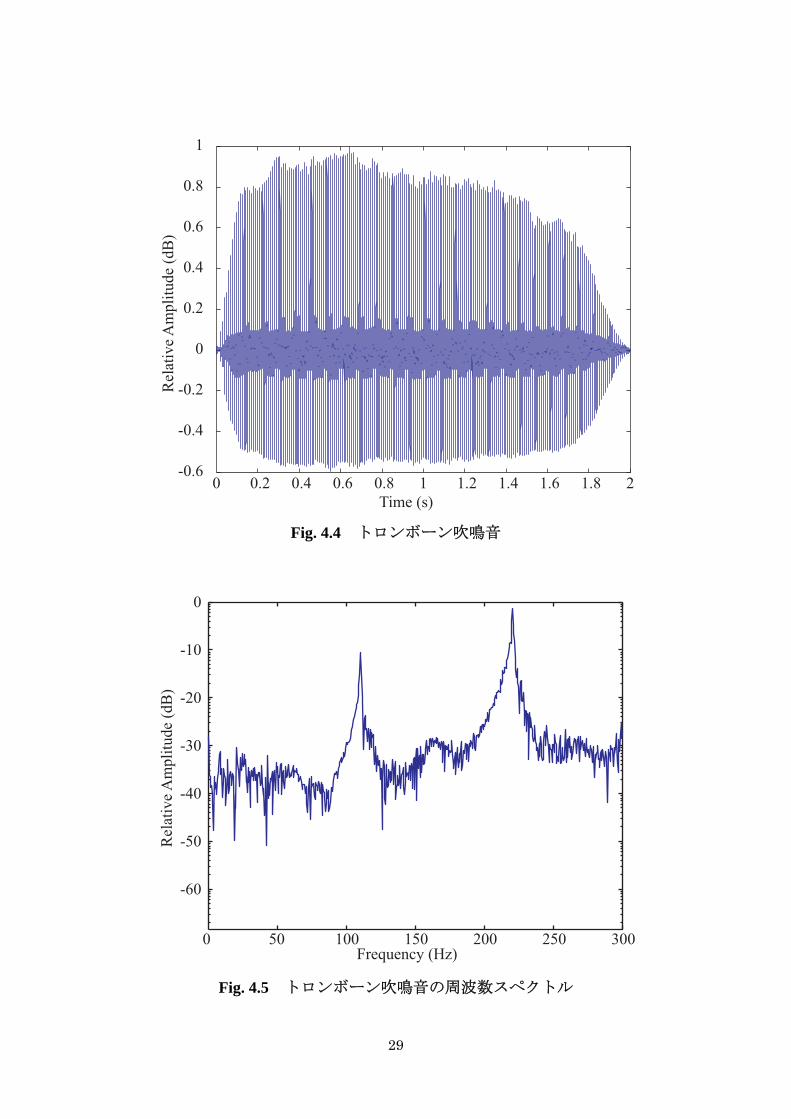
次にトロンボーンの吹鳴音により周波数補間を行った。Fig. 4.4 に示した吹鳴
音は RWC 研究用音楽データベースから得た。Fig. 4.5 に示すように 1 つの吹鳴
音の周波数スペクトルからその基本周波数を求める。このときの周波数分解能
は 0.3 Hz 程度であり、多少の誤差がある。ここで得られた基本周波数を吹鳴音
の基本周波数と仮定して補間結果での精度比較に用いる。先ほどの吹鳴音のデ
ータから一部を抽出する。このデータのサンプリング周波数が44.1 kHzであり、
抽出したのは 4410 点なので、抽出した吹鳴音の周波数スペクトルの分解能は 10
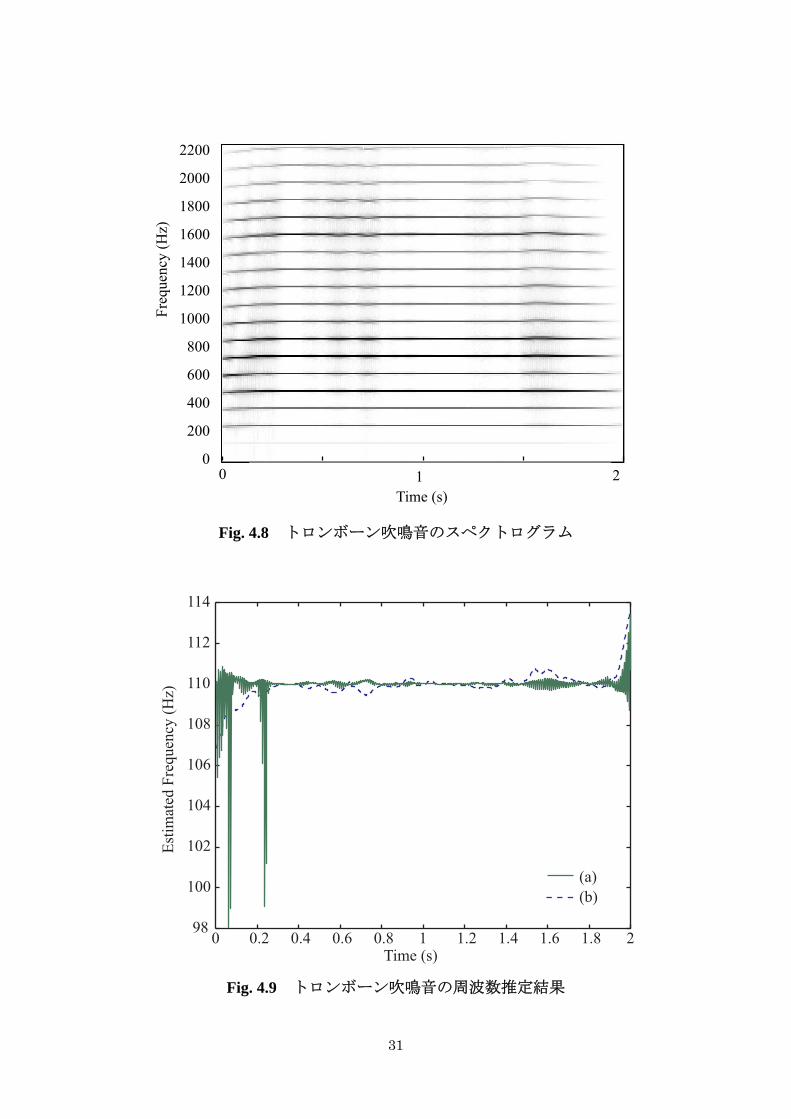
Hz である。Fig.4.6、Fig. 4.7 は抽出したデータとその基本周波数付近のスペクト
ルを示している。この抽出を吹鳴音のはじめから最後まで走査しながら行うこ
とで Fig.4.8 が得られる。この図から吹鳴音ははじめ少し低い周波数から始まり、
その後もわずかではあるが周波数が揺らぎ、終わりでは少し高い周波数になっ
ていることがわかる。低次倍音では変化が見られないが、高次倍音を見るとよ
くわかる。Fig. 4.9 は走査して得られたスペクトルをそれぞれ補間し、基本周波
数を推定した結果である。補完していない場合は 100 Hz から 110 Hz の間で大き
く振動していたが、補間を行った周波数はどちらも 110 Hz あたりで安定してい
る。しかしながら細かく見ると、大局的見て安定している二次関数で補間を行
った周波数は局所的にみればかなり不安定であることがわかる。それに比べて
比率を用いる補間ではかなり安定した推定を行っている。以上のことから場合
化の分だけ計算量は多いが、比率を用いる補間が優れていることがわかる。
28
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time (s)
Rel
ativ
e A
mpli
tude
(dB
)
Fig. 4.4 トロンボーン吹鳴音
0 50 100 150 200 250 300
-60
-50
-40
-30
-20
-10
0
Frequency (Hz)
Rel
ativ
e A
mpli
tude
(dB
)
Fig. 4.5 トロンボーン吹鳴音の周波数スペクトル
29

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time (s)
Rel
ativ
e A
mpli
tude
(dB
)
Fig. 4.6 トロンボーン吹鳴音の一部
0 50 100 150 200 250 300
-50
-40
-30
-20
-10
0
Frequency (Hz)
Rel
ativ
e A
mpli
tude
(dB
)
Fig. 4.7 トロンボーン吹鳴音の一部の周波数スペクトル
30
Time (s)
Fre
qu
ency
(H
z)
0 21
200
400
600
800
1200
1000
1400
1600
1800
2000
2200
0
Time (s)
Fig. 4.8 トロンボーン吹鳴音のスペクトログラム
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 298
100
102
104
106
108
110
112
114
Time (s)
Est
imat
ed F
requen
cy (
Hz)
(b)
(a)
Fig. 4.9 トロンボーン吹鳴音の周波数推定結果
31
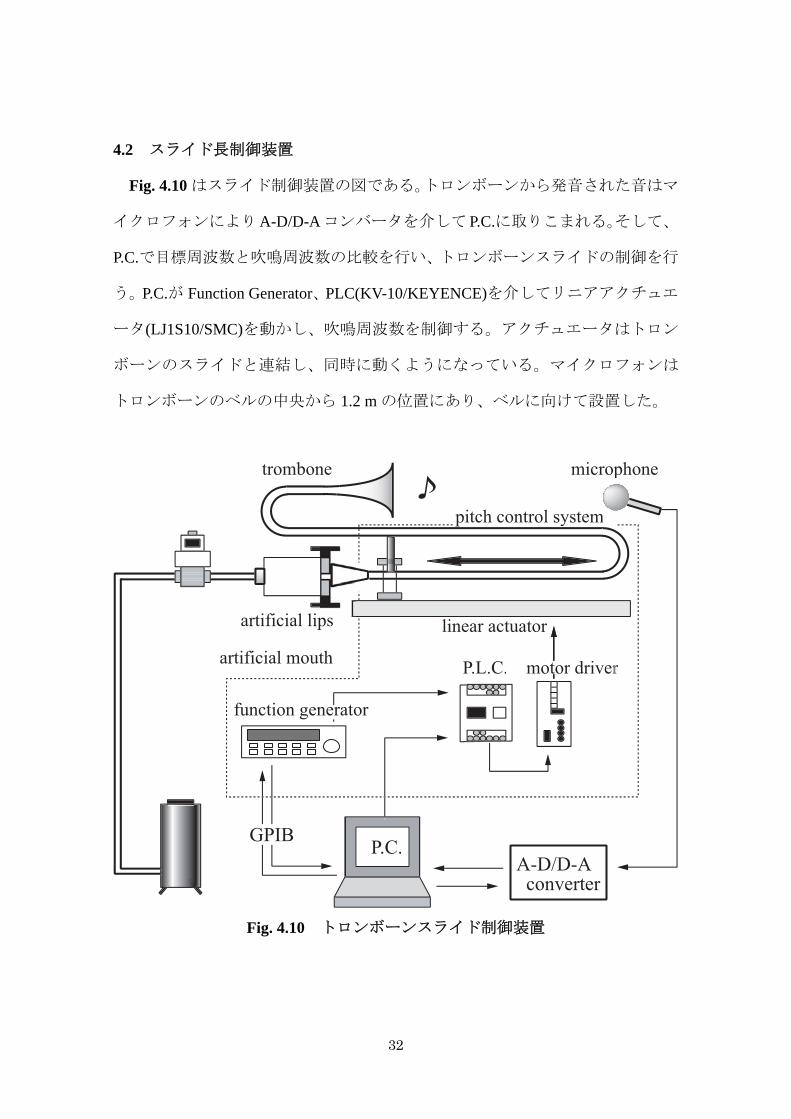
4.2 スライド長制御装置
Fig. 4.10 はスライド制御装置の図である。トロンボーンから発音された音はマ
イクロフォンによりA-D/D-Aコンバータを介してP.C.に取りこまれる。そして、
P.C.で目標周波数と吹鳴周波数の比較を行い、トロンボーンスライドの制御を行
う。P.C.が Function Generator、PLC(KV-10/KEYENCE)を介してリニアアクチュエ
ータ(LJ1S10/SMC)を動かし、吹鳴周波数を制御する。アクチュエータはトロン
ボーンのスライドと連結し、同時に動くようになっている。マイクロフォンは
トロンボーンのベルの中央から 1.2 m の位置にあり、ベルに向けて設置した。
P.C.
linear actuator
microphonetrombone
artificial lips
P.L.C.
A-D/D-A converter
motor drivermotor driver
function generator
GPIB
artificial mouth
it h t l tpitch control system
Fig. 4.10 トロンボーンスライド制御装置
32

4.3 スライド長制御実験
4.3.1 実験の目的
トロンボーン奏者は吹鳴音を聞いて瞬時に音高を調整することができる。ス
ライド制御装置がどの程度の速さで音高を制御できるのか、遅れるとすればど
こに原因があるのかを知るために、音高調整実験を行った。
4.3.2 実験方法
トロンボーンを吹鳴させ吹鳴周波数を推定し、その周波数を目標周波数に設
定する。その後、±5 Hz 目標周波数を変化させ、目標値に収束するまでの時間
を測定する。吹鳴圧力、アンブシュアは常に一定とする。一回の試行ごとに吹
鳴を中断するので、各試行においてアンブシュアは異なっている。吹鳴圧力は
人の吹鳴圧力に近い 10 kPa とした。サンプリング周波数は 40.96 kHz、サンプル
数は 4096 点とした。
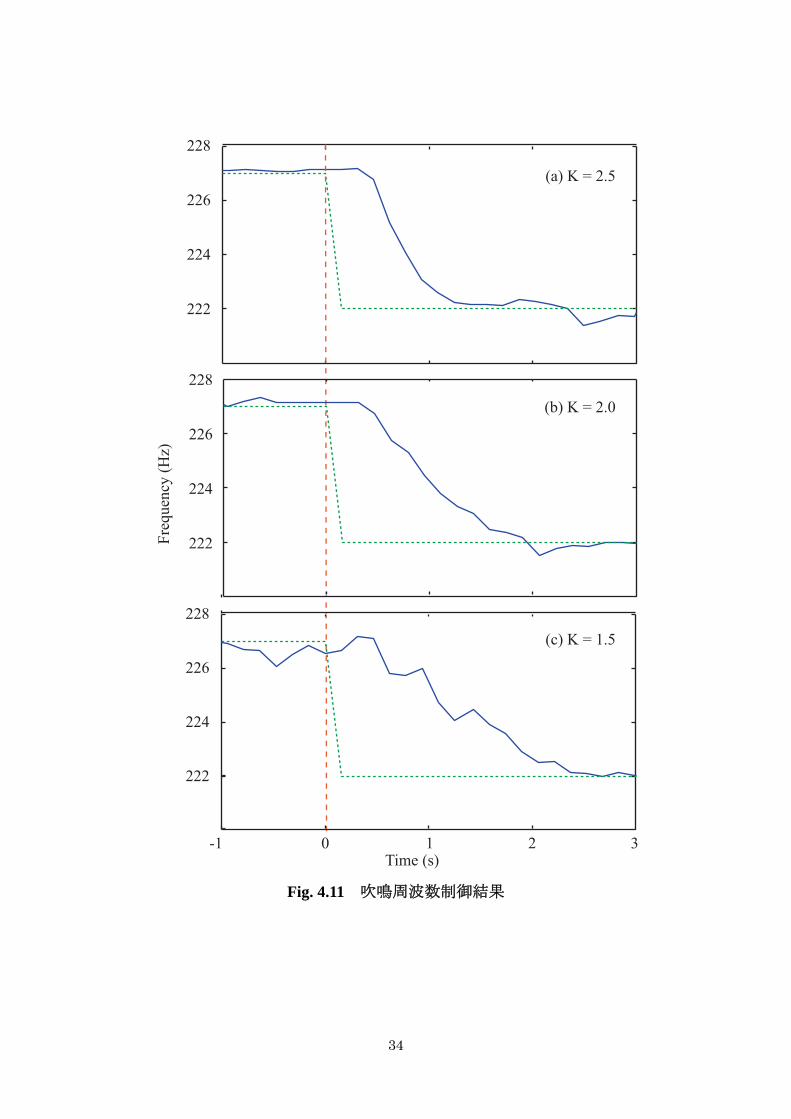
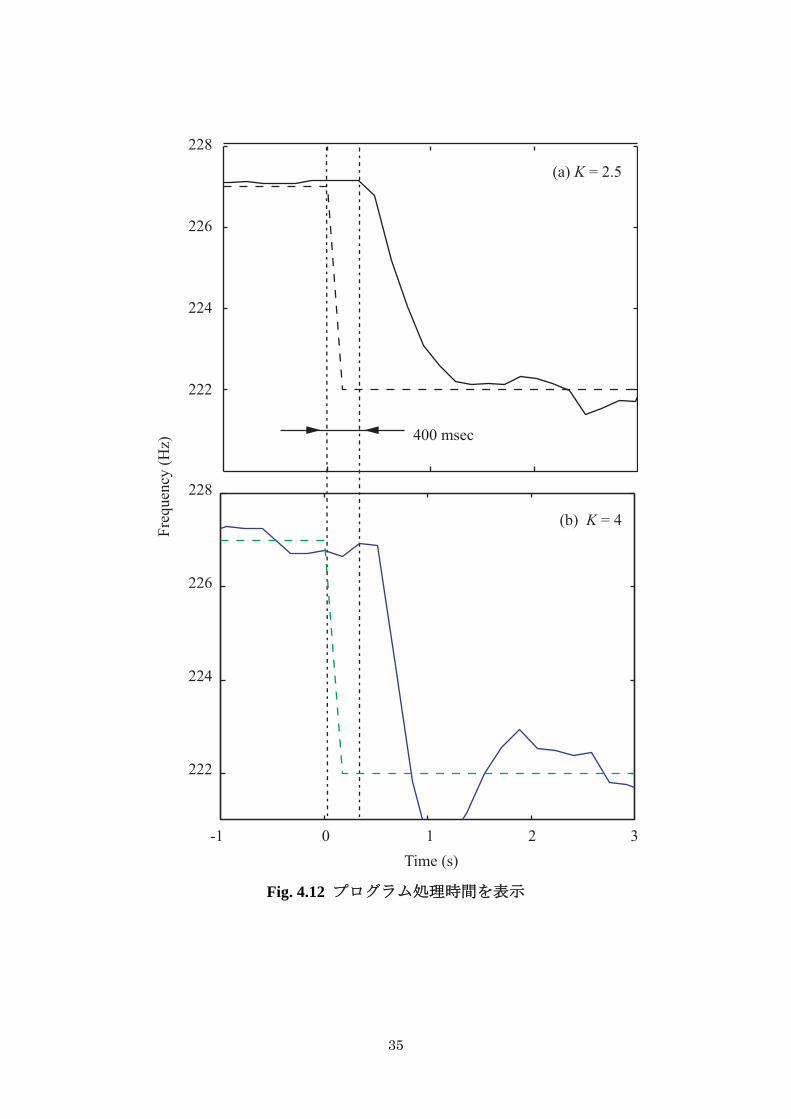
4.3.3 実験結果・考察
Fig. 4.11 は音高制御の実験結果である。吹鳴周波数は目標周波数に収束して
いることがわかる。制御が常に安定しているわけではないが、収束時間は 1 s か
ら 2 s である[20-22]。Fig. 4.11 を見ると、目標周波数を変えても吹鳴周波数の変
化が起こるまでに、ある一定の遅延があることがわかる。そこで、各装置の処
理時間を計測してみたところ、P.C.のプログラムの処理にもっとも時間がかかっ
ており、一サイクルに 210 ms も必要とすることがわかった。そして目標周波数
を変更する指示がでてから実際に制御されるまでは 400 ms ほど必要とする。
Fig.4.12 は目標周波数を変更してから実際に吹鳴周波数制御に移行する時間を
表示した吹鳴周波数の遷移図である。
33
Fre
quen
cy (
Hz)
Time (s)
(a) K = 2.5
222
224
226
228
(b) K = 2.0
222
224
226
228
-1 0 1 2 3
(c) K = 1.5
222
224
226
228
Fig. 4.11 吹鳴周波数制御結果
34
Fre
quen
cy (
Hz)
Time (s)
222
224
226
228
400 msec
(a) K = 2.5
-1 0 1 2 3
222
224
226
228
(b) K = 4
Fig. 4.12 プログラム処理時間を表示
35

Number of Samples (points)
Fre
qu
ency
Res
olu
tio
n (
Hz)
Pro
cess
ing
tim
e (m
s)
64
256
1024
4096
(a)
256 1024 4096 16384
2.5
10
40
160
(b)
Fig. 4.13 吹鳴音のサンプル数によるプログラムの処理時間と周波数分解能
36
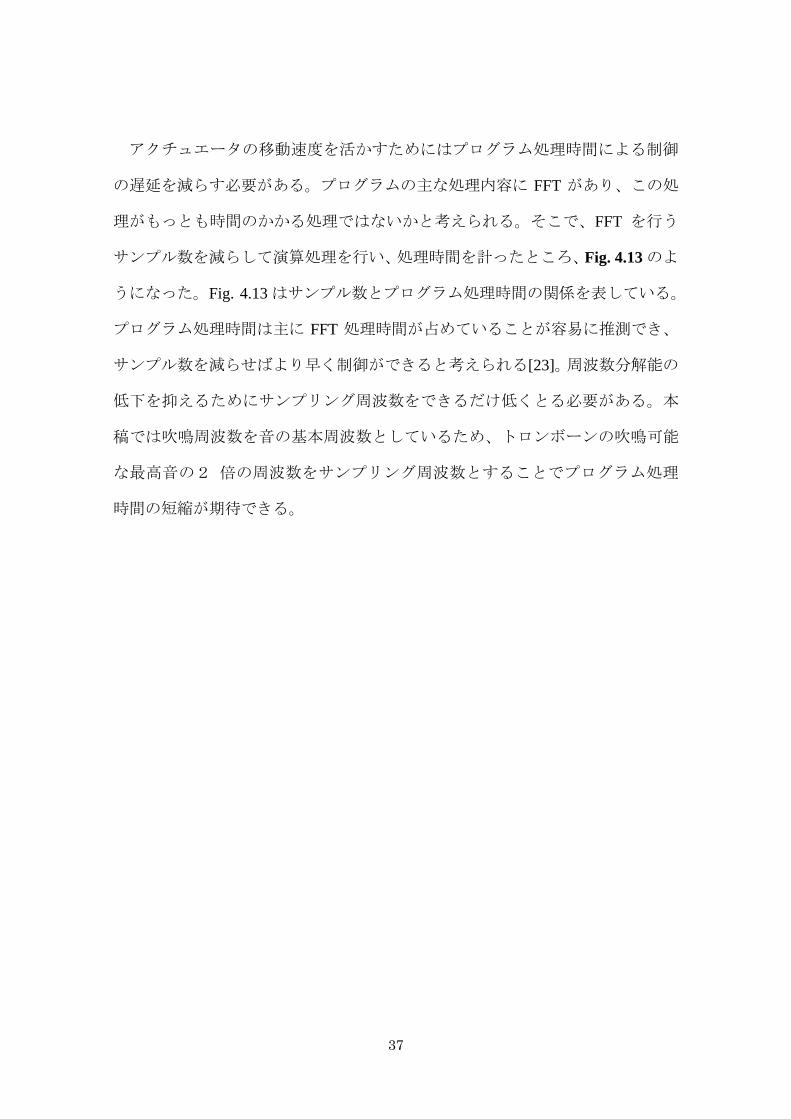
アクチュエータの移動速度を活かすためにはプログラム処理時間による制御
の遅延を減らす必要がある。プログラムの主な処理内容に FFT があり、この処
理がもっとも時間のかかる処理ではないかと考えられる。そこで、FFT を行う
サンプル数を減らして演算処理を行い、処理時間を計ったところ、Fig. 4.13 のよ
うになった。Fig. 4.13 はサンプル数とプログラム処理時間の関係を表している。
プログラム処理時間は主に FFT 処理時間が占めていることが容易に推測でき、
サンプル数を減らせばより早く制御ができると考えられる[23]。周波数分解能の
低下を抑えるためにサンプリング周波数をできるだけ低くとる必要がある。本
稿では吹鳴周波数を音の基本周波数としているため、トロンボーンの吹鳴可能
な最高音の2 倍の周波数をサンプリング周波数とすることでプログラム処理
時間の短縮が期待できる。
37

第 5 章 結 論 本研究は、トロンボーンの自動演奏を目指して、その実現のために重要な人
工吹鳴装置を中心に行った研究をまとめたものである。人工吹鳴の要であるア
ンブシュアのパラメータ特定と正確な音高で吹鳴するのに必要なトロンボーン
スライド制御装置の開発を行った。
第 2 章では発音体が唇という複雑なものである金管楽器は他の管楽器に比べ
て発音が難しいことを示し、自動演奏装置としても物理学としても、自動演奏
を実現させる有効性が高いことを示した。トロンボーン自動演奏に必要な要素
を 3 つ示し、自動演奏装置の全体像を示した。
第 3 章では人工口の上下の唇幅を変化させるために、アルミ製のスライドを
薄いアルミの板で挟んだものをシート状のゲルで包んだ人工口について示した。
そして唇間の幅を変え、音列の変化を見る吹鳴実験を行った。トロンボーンの
吹鳴にはスライド長と吹鳴音高の間にヒステリシスが存在し、あるスライド長
に対して複数の吹鳴音が存在した。しかしながら、唇間の幅を制御することで
吹鳴音を 1 つに絞り込める可能性があることがわかった。また、吹鳴音の周波
数スペクトルの強度が第 2 倍音と第 4 倍音よりも第 3 倍音が強いことが演奏者
の吹鳴音と似ていることがわかった。人工口のスライドにより変化するのが唇
間の幅だけでなく、唇の張力も変化させてしまう。そのため唇間の幅のみで吹
鳴音を絞り込めると決まったわけではないが、アンブシュアのパラメータの一
部であることがわかった。演奏者も音列を変えるときに唇間の幅を変えるので、
人間に近づいたと言える。
そして第 4 章で、吹鳴音高をフィードバックし、トロンボーンスライド長を
変えることで制御した。リアルタイム処理を行うため観測時間が短くなり、周
波数分解能の低くなるが、スペクトルピーク周辺の振幅比を用いる補間により、
38
最大誤差 0.6 mHz の高精度で吹鳴周波数の推定を行えることができた。アンブ
シュアや吹鳴圧力を変えることなく、トロンボーンスライドのみで、音高の微
調整を 1 s から 2 s 程度で行うことができた。チューニングの際、演奏者が音高
を調整するのに必要とする時間もこの程度である。
以上より、吹鳴の 3 要素のひとつであるアンブシュアについて 1 つのパラメ
ータを得、手動ではあるが制御ことができた。さらに吹鳴の要素であるスライ
ド長の制御も行うことができた。今後アンブシュアのパラメータを探し出し、
それぞれを制御できるようになれば、自動演奏が可能になると考える。また、
本稿では吹鳴圧力を常に 10 kPa で扱ってきたが、演奏の表現を行ううえで圧力
の調整が重要であると思われる。吹鳴圧力の調整に関して研究をする必要があ
ると言える。
39
謝 辞 本研究の主題を与えていただいた、指導教官であるシステム情報工学研究科
知能機能システム専攻 永井啓之亮教授には大変お世話になりました。同 水
谷孝一教授には研究を進めるための実験方法や論文作成について、学会の準
備・発表など、大変多くのご指導をいただきました。永井・水谷研究室の皆様
には研究に関する相談に乗っていただくなど多くの支援に感謝しております。
筑波大学管弦楽団の皆様にはお忙しい中、写真の撮影をさせていただきました。
この場を借りて厚く御礼申し上げます。
40
参考文献 [1]Anthony Baines, “ ’Brass instruments’ Their History and Development”, Dover Pubns, New York
(1993).
[2]Fletcher,”Excitation mechanisms in woodwind and brass instruments”,Acustica43,pp63-72(1979)
[3] 藤沼朝保,”楽器が語る音楽の現場”, ラジオ技術社(1974)
[4] Fletcher, ”The Physics of musical instruments”, Springer-Verlag(1998)
[5] 川村佳史, 小山泰幸, 高島 俊: “トロンボーン自動演奏ロボット,” 日本機械学会第 36
回学生員卒業研究発表会(1997).
[6] S. Takashima “Automatic Performance Robots of Saxophone and Trumpet,” J. Robotics Soc.
Jpn., 14, pp.196-199(1996).
[7] J. S. Cullen, J. Gilbert, D. M. Campbell, “Brass Instruments: Linear Stability analysis and
Experiments with an Artificial Mouth”, Acustica, 86, pp.704-724(2003).
[8] M. A. Neal, O. richards, D. M. Campbell, J. Gilbert “Study of the reed mechanism of brass
instruments using an artificial mouth,” Proc. ISMA, 1, pp.99-102(2001).
[9] David C. Copley and William J. Strong, “A stroboscopic study of lip vibrations in a trombone,” J.
Acoust. Soc. Am, 99, pp.1219-1226(1995).
[10]S. Yoshikawa and Y. Muto, “Lip-Wave Generation in Horn Players and the Estimation of
Lip-Tissue Elasticity,” acustica, 89, pp.145-162(2003)
[11] Saneyoshi, J., Teramura, H., and Yoshikawa, S.,”Feedback oscillations in reed woodwind and
brasswind instruments”, Acustica 62,pp194-210(1987)
[12] 根本俊男:すぺての管楽器奏者へ ある歯科医の提言”,音楽之友社,東京,(1988)
[13] フィリップ・ファーカス:”金管楽器を吹く人のために”,北村源三・他監修,全音出版社,
東京,(1990)
[14]モーリス・M・ポーター:”アンブシュア”,大室勇一・荒木勇三共訳,全音出版社,東京,(1979)
[15]小堀 孝政、永井 啓之亮、水谷 孝一:”トロンボーン人工吹鳴における唇の硬さと
開口幅”,日本音響学会音楽音響研究会資料,MA2002-25,pp41-42 (2002)
[16] 金子昌弘,水谷孝一,永井啓之亮,江原史朗:”自動演奏のための張力可変型人工唇”,日本
音響学会 2003 年秋季研究発表会講演論文集Ⅰ,2-1-2,pp669-670 (2003)
[17] 金子昌弘,水谷孝一,江原史明,永井啓之亮:”金管楽器のための人工唇”,日本機械学会第
16回バイオエンジニアリング講演会講演論文集,pp133-134 (2004)
[18] Yoshihiro Kaneko, Sayaka Mizuhara, Koichi Mizutani and Keinosuke Nagai: “Artificial Lips
for Automatic Trombone Blower,” Proceedings of The First Asian Pacific Conference on
Biomechanics (AP Biomech 2004) Sponsored by The Japan Society of Mechanical
Engineering,T-13-015, pp.23-24 (2004)
[19] 田部井 誠,上田 光宏: “FFT を用いた高精度周波数決定法,” 電子情報通信学会論文
誌, J70-A, 5, pp.798-805 (1987).
41
[20] 金子 昌弘、水谷 孝一、永井 啓之亮:”吹鳴周波数によるトロンボーンスライド長
のフィードバック制御”,日本音響学会音楽音響研究会資料,MA2003-14,pp11-12 (2003)
[21] Yoshihiro Kaneko, Koichi Mizutani and Keinosuke Nagai: “Pitch controller for automatic
trombone blower,” Proceedings of International Symposium on Musical Acoustics
(ISMA2004),1-P1-3, pp.5-8 (2004)
[22] 金子 昌弘、水谷 孝一、永井 啓之亮:” フィードバック制御を用いるトロンボー
ンの自動音高調節”,日本音響学会音楽音響研究会資料,MA2004-13(2004)
[23] 金子 昌弘、水原 明香、水谷 孝一、永井 啓之亮:”トロンボーン自動演奏のため
の音高制御における遅延”,日本音響学会音楽音響研究会資料,MA2004-26,pp53-54(2004)
42

著者参考文献
査読付き国際会議論文
1)Yoshihiro Kaneko, Sayaka Mizuhara, Koichi Mizutani and Keinosuke Nagai: “Artificial Lips for
Automatic Trombone Blower,” Proceedings of The First Asian Pacific Conference on
Biomechanics (AP Biomech 2004) Sponsored by The Japan Society of Mechanical
Engineering,T-13-015, pp.23-24 (2004).
2)Yoshihiro Kaneko, Koichi Mizutani and Keinosuke Nagai: “Pitch controller for automatic
trombone blower,” Proceedings of International Symposium on Musical Acoustics
(ISMA2004),1-P1-3, pp.5-8 (2004).
報 告
1)金子 昌弘、水谷 孝一、永井 啓之亮:”吹鳴周波数によるトロンボーンスライド長の
フィードバック制御”,日本音響学会音楽音響研究会資料,MA2003-14,pp11-12 (2003).
2)金子 昌弘、水谷 孝一、永井 啓之亮、江原 史朗:”自動演奏のための張力可変型人
工唇”,日本音響学会 2003 年秋季研究発表会講演論文集 I,2-1-2,pp669-670 (2003).
3)金子 昌弘、水谷 孝一、江原 史明、永井 啓之亮:”金管楽器のための人工唇”,日本機
械学会第16回バイオエンジニアリング講演会講演論文集,pp133-134 (2004).
4)高下 昌也、金子 昌弘、水谷 孝一、松本 栄次:”油分による鳴り砂音響特性の変化”,
日本音響学会 2004 年春季研究発表講演論文集 II、2-Q-10, pp1021-1022 (2004).
5)金子 昌弘、水谷 孝一、永井 啓之亮:” フィードバック制御を用いるトロンボーンの
自動音高調節”,日本音響学会音楽音響研究会資料,MA2004-13,pp2-6(2004).
6)岡村 智弘、金子 昌弘、水谷 孝一:”気柱振動プローブを用いる土質評価の可能性の
検討”,2004年度農業施設学会大会講演要旨集,P-13, pp.164-165(2004)
7)金子 昌弘、水原 明香、水谷 孝一、永井 啓之亮:”トロンボーン自動演奏のための
音高制御における遅延”,日本音響学会音楽音響研究会資料,MA2004-26,pp53-54(2004).
8)水原 明香、金子 昌弘、水谷 孝一、永井 啓之亮:”トロンボーン人工吹鳴における
口腔内圧力と発音周波数”, 日本音響学会音楽音響研究会資料,MA2004-26,pp55-56(2004).
43

















![早稲田大学大学院商学研究科 博士後期課程 課程に …...1 早稲田大学大学院商学研究科 博士後期課程[課程による者] 博士(商学)学位申請の手引き](https://img.pdfslide.tips/doc/110x75/5ec8032743fef409d772d43b/cceccc-oeoeec-ec-1-cceccc.jpg)






![早稲田大学大学院商学研究科 博士後期課程 課程に …...2017/03/05 · 1 早稲田大学大学院商学研究科 博士後期課程[課程による者] 博士(商学)学位申請の手引き](https://img.pdfslide.tips/doc/110x75/5edbac5fad6a402d666602a1/cceccc-oeoeec-ec-20170305.jpg)




