Embed Size (px)
Citation preview
直交ロボット
4-23 直交ロボット
直交ロボット
テーブルトップ
ロボット
スカラロボット
直交ロボット
直交ロボット 4-24
直交ロボット
テーブルトップ
ロボット
スカラロボット
■ 4軸組合せ ケーブル収納 詳細図
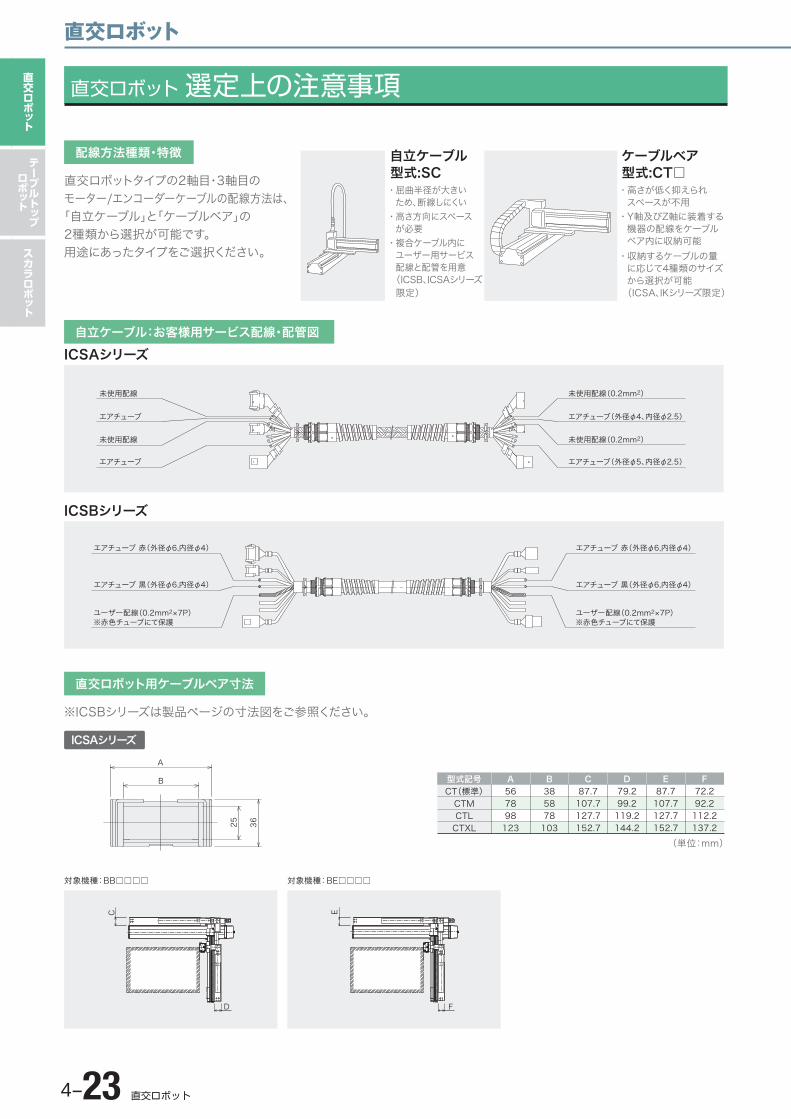
直交ロボットタイプの2軸目・3軸目のモーター/エンコーダーケーブルの配線方法は、
「自立ケーブル」と「ケーブルベア」の2種類から選択が可能です。用途にあったタイプをご選択ください。
屈曲半径が大きいため、断線しにくい高さ方向にスペースが必要複合ケーブル内にユーザー用サービス配線と配管を用意
(ICSB、ICSAシリーズ限定)
・
・
・
自立ケーブル型式:SC
高さが低く抑えられスペースが不用Y軸及びZ軸に装着する機器の配線をケーブルベア内に収納可能収納するケーブルの量に応じて4種類のサイズから選択が可能
(ICSA、IKシリーズ限定)
・
・
・
ケーブルベア型式:CT□
ICSAシリーズ
エアチューブ(外径φ4、内径φ2.5)
未使用配線(0.2mm2)
未使用配線(0.2mm2)
エアチューブ(外径φ5、内径φ2.5)エアチューブ
未使用配線
エアチューブ
未使用配線
ICSBシリーズ
エアチューブ 赤(外径φ6,内径φ4)
エアチューブ 黒(外径φ6,内径φ4)
ユーザー配線(0.2mm2×7P)※赤色チューブにて保護
エアチューブ 赤(外径φ6,内径φ4)
エアチューブ 黒(外径φ6,内径φ4)
ユーザー配線(0.2mm2×7P)※赤色チューブにて保護
配線方法種類・特徴
※ICSBシリーズは製品ページの寸法図をご参照ください。
(単位:mm)
型式記号CT(標準)
CTMCTL
CTXL
A567898
123
B385878
103
C87.7
107.7127.7152.7
D79.299.2
119.2144.2
E87.7
107.7127.7152.7
F72.292.2
112.2137.2
(単位:mm)
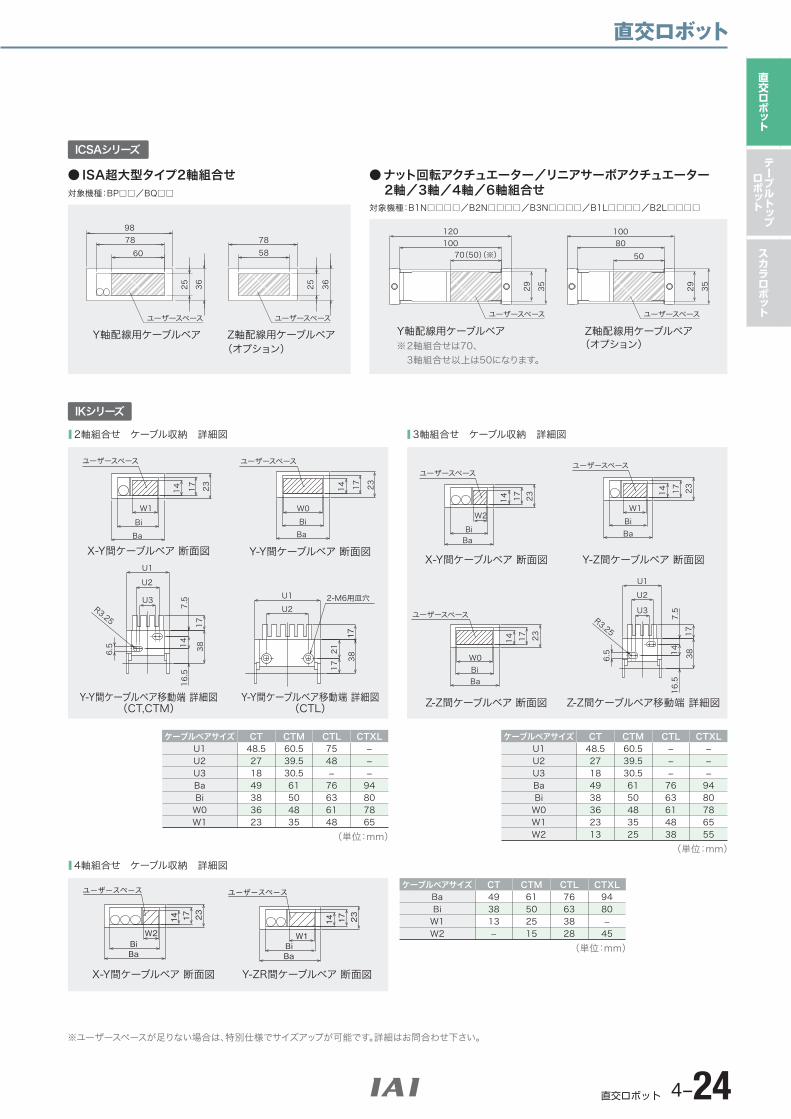
ケーブルベアサイズ CT CTM CTL CTXL U1 48.5 60.5 75 - U2 27 39.5 48 - U3 18 30.5 - - Ba 49 61 76 94 Bi 38 50 63 80 W0 36 48 61 78 W1 23 35 48 65
(単位:mm)
ケーブルベアサイズ CT CTM CTL CTXL Ba 49 61 76 94 Bi 38 50 63 80 W1 13 25 38 - W2 - 15 28 45
(単位:mm)
ケーブルベアサイズ CT CTM CTL CTXL U1 48.5 60.5 - - U2 27 39.5 - - U3 18 30.5 - - Ba 49 61 76 94 Bi 38 50 63 80 W0 36 48 61 78 W1 23 35 48 65 W2 13 25 38 55
BB□□□□対象機種: BE□□□□対象機種:
直交ロボット用ケーブルベア寸法
自立ケーブル:お客様用サービス配線・配管図
対象機種:BP□□/BQ□□
Y軸配線用ケーブルベア Z軸配線用ケーブルベア(オプション)
対象機種:B1N□□□□/B2N□□□□/B3N□□□□/B1L□□□□/B2L□□□□
Z軸配線用ケーブルベア(オプション)
Y軸配線用ケーブルベア2軸組合せは70、3軸組合せ以上は50になります。
※
●ナット回転アクチュエーター/リニアサーボアクチュエーター 2軸/3軸/4軸/6軸組合せ
● ISA超大型タイプ2軸組合せ
※ユーザースペースが足りない場合は、特別仕様でサイズアップが可能です。詳細はお問合わせ下さい。
ユーザースペースユーザースペース ユーザースペース ユーザースペース
9878
60
25 36
7858
25 36
10080
50
3529
■ 2軸組合せ ケーブル収納 詳細図 ■ 3軸組合せ ケーブル収納 詳細図
ICSAシリーズ
ICSAシリーズ
IKシリーズ
36
B
A
25
D
C
F
E
120100
70(50)(※)
29 35
Z-Z間ケーブルベア移動端 詳細図Z-Z間ケーブルベア 断面図
Y-Z間ケーブルベア 断面図X-Y間ケーブルベア 断面図
ユーザースペース
17 2314
W0
BaBi
23
ユーザースペース
17
W1
14
BiBa
17
ユーザースペース
2314
W2Bi
Ba
38
16.5
17
U1
6.5
U3
U2
147.
5
R3.25
Y-Y間ケーブルベア 断面図X-Y間ケーブルベア 断面図
Y-Y間ケーブルベア移動端 詳細図(CT,CTM)
Y-Y間ケーブルベア移動端 詳細図(CTL)
38
16.5
17
U1
6.5
U3
U2
147.
5
R3.25
2-M6用皿穴U1U2
1738
1721
BiBa
17
W0
14 23
ユーザースペース
BaBi
14
W1
17 23
ユーザースペース
Y-ZR間ケーブルベア 断面図X-Y間ケーブルベア 断面図
W1BiBa
14 17 23
ユーザースペース
W2BiBa
14 17 23
ユーザースペース
直交ロボット 選定上の注意事項
HP リンク _選定上の注意事項 _p01
直交ロボット
直交ロボット 4-24
直交ロボット
テーブルトップ
ロボット
スカラロボット
■ 4軸組合せ ケーブル収納 詳細図
直交ロボットタイプの2軸目・3軸目のモーター/エンコーダーケーブルの配線方法は、
「自立ケーブル」と「ケーブルベア」の2種類から選択が可能です。用途にあったタイプをご選択ください。
屈曲半径が大きいため、断線しにくい高さ方向にスペースが必要複合ケーブル内にユーザー用サービス配線と配管を用意
(ICSB、ICSAシリーズ限定)
・
・
・
自立ケーブル型式:SC
高さが低く抑えられスペースが不用Y軸及びZ軸に装着する機器の配線をケーブルベア内に収納可能収納するケーブルの量に応じて4種類のサイズから選択が可能
(ICSA、IKシリーズ限定)
・
・
・
ケーブルベア型式:CT□
ICSAシリーズ
エアチューブ(外径φ4、内径φ2.5)
未使用配線(0.2mm2)
未使用配線(0.2mm2)
エアチューブ(外径φ5、内径φ2.5)エアチューブ
未使用配線
エアチューブ
未使用配線
ICSBシリーズ
エアチューブ 赤(外径φ6,内径φ4)
エアチューブ 黒(外径φ6,内径φ4)
ユーザー配線(0.2mm2×7P)※赤色チューブにて保護
エアチューブ 赤(外径φ6,内径φ4)
エアチューブ 黒(外径φ6,内径φ4)
ユーザー配線(0.2mm2×7P)※赤色チューブにて保護
配線方法種類・特徴
※ICSBシリーズは製品ページの寸法図をご参照ください。
(単位:mm)
型式記号CT(標準)
CTMCTL
CTXL
A567898
123
B385878
103
C87.7
107.7127.7152.7
D79.299.2
119.2144.2
E87.7
107.7127.7152.7
F72.292.2
112.2137.2
(単位:mm)
ケーブルベアサイズ CT CTM CTL CTXL U1 48.5 60.5 75 - U2 27 39.5 48 - U3 18 30.5 - - Ba 49 61 76 94 Bi 38 50 63 80 W0 36 48 61 78 W1 23 35 48 65
(単位:mm)
ケーブルベアサイズ CT CTM CTL CTXL Ba 49 61 76 94 Bi 38 50 63 80 W1 13 25 38 - W2 - 15 28 45
(単位:mm)
ケーブルベアサイズ CT CTM CTL CTXL U1 48.5 60.5 - - U2 27 39.5 - - U3 18 30.5 - - Ba 49 61 76 94 Bi 38 50 63 80 W0 36 48 61 78 W1 23 35 48 65 W2 13 25 38 55
BB□□□□対象機種: BE□□□□対象機種:
直交ロボット用ケーブルベア寸法
自立ケーブル:お客様用サービス配線・配管図
対象機種:BP□□/BQ□□
Y軸配線用ケーブルベア Z軸配線用ケーブルベア(オプション)
対象機種:B1N□□□□/B2N□□□□/B3N□□□□/B1L□□□□/B2L□□□□
Z軸配線用ケーブルベア(オプション)
Y軸配線用ケーブルベア2軸組合せは70、3軸組合せ以上は50になります。
※
●ナット回転アクチュエーター/リニアサーボアクチュエーター 2軸/3軸/4軸/6軸組合せ
● ISA超大型タイプ2軸組合せ
※ユーザースペースが足りない場合は、特別仕様でサイズアップが可能です。詳細はお問合わせ下さい。
ユーザースペースユーザースペース ユーザースペース ユーザースペース
9878
60
25 36
7858
25 36
10080
50
3529
■ 2軸組合せ ケーブル収納 詳細図 ■ 3軸組合せ ケーブル収納 詳細図
ICSAシリーズ
ICSAシリーズ
IKシリーズ
36
B
A
25
D
C
F
E
120100
70(50)(※)
29 35
Z-Z間ケーブルベア移動端 詳細図Z-Z間ケーブルベア 断面図
Y-Z間ケーブルベア 断面図X-Y間ケーブルベア 断面図
ユーザースペース
17 2314
W0
BaBi
23
ユーザースペース
17
W1
14
BiBa
17
ユーザースペース
2314W2
BiBa
38
16.5
17
U1
6.5
U3
U2
147.
5
R3.25
Y-Y間ケーブルベア 断面図X-Y間ケーブルベア 断面図
Y-Y間ケーブルベア移動端 詳細図(CT,CTM)
Y-Y間ケーブルベア移動端 詳細図(CTL)
38
16.5
17
U1
6.5
U3
U2
147.
5
R3.25
2-M6用皿穴U1U2
1738
1721
BiBa
17
W0
14 23
ユーザースペース
BaBi
14
W1
17 23
ユーザースペース
Y-ZR間ケーブルベア 断面図X-Y間ケーブルベア 断面図
W1BiBa
14 17 23
ユーザースペース
W2BiBa
14 17 23
ユーザースペース
HP リンク _選定上の注意事項 _p02
直交ロボット
4-25 直交ロボット
直交ロボット
テーブルトップ
ロボット
スカラロボット
直交ロボット
直交ロボット 4-26
直交ロボット
テーブルトップ
ロボット
スカラロボット
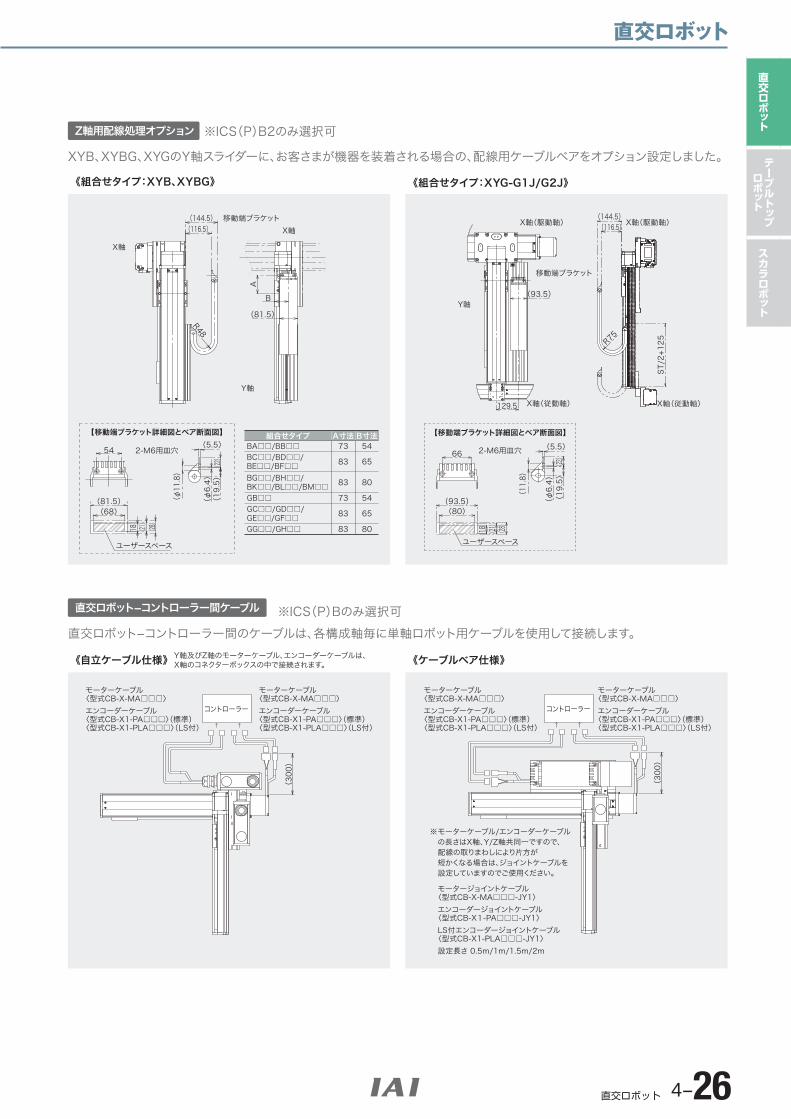
直交ロボット-コントローラー間のケーブルは、各構成軸毎に単軸ロボット用ケーブルを使用して接続します。
《ケーブルベア仕様》Y軸及びZ軸のモーターケーブル、エンコーダーケーブルは、X軸のコネクターボックスの中で接続されます。《自立ケーブル仕様》
コントローラー
(30
0)
モーターケーブル〈型式CB-X-MA□□□〉エンコーダーケーブル
〈型式CB-X1-PA□□□〉(標準)〈型式CB-X1-PLA□□□〉(LS付)
モーターケーブル〈型式CB-X-MA□□□〉エンコーダーケーブル
〈型式CB-X1-PA□□□〉(標準)〈型式CB-X1-PLA□□□〉(LS付)
(30
0)
コントローラー
モータージョイントケーブル〈型式CB-X-MA□□□-JY1〉エンコーダージョイントケーブル
〈型式CB-X1-PA□□□-JY1〉LS付エンコーダージョイントケーブル
〈型式CB-X1-PLA□□□-JY1〉設定長さ 0.5m/1m/1.5m/2m
モーターケーブル〈型式CB-X-MA□□□〉エンコーダーケーブル
〈型式CB-X1-PA□□□〉(標準)〈型式CB-X1-PLA□□□〉(LS付)
モーターケーブル〈型式CB-X-MA□□□〉エンコーダーケーブル
〈型式CB-X1-PA□□□〉(標準)〈型式CB-X1-PLA□□□〉(LS付)
モーターケーブル/エンコーダーケーブルの長さはX軸、Y/Z軸共同一ですので、配線の取りまわしにより片方が短かくなる場合は、ジョイントケーブルを設定していますのでご使用ください。
※
※ICS(P)B2のみ選択可
XYB、XYBG、XYGのY軸スライダーに、お客さまが機器を装着される場合の、配線用ケーブルベアをオプション設定しました。
《組合せタイプ:XYG-G1J/G2J》《組合せタイプ:XYB、XYBG》
A
B
(81.5)
X軸
Y軸
移動端ブラケット
R48
(116.5)(144.5)
X軸
(φ
6.4)
(19
.5)
(5.5)【移動端ブラケット詳細図とベア断面図】
(93.5)
(28)
(80)
18 (21)
66
ユーザースペース
2-M6用皿穴
(11
.8)
(22)
R75
(116.5)(144.5)
129.5
(93.5)
X軸(駆動軸) X軸(駆動軸)
Y軸
ST/2
+125
移動端ブラケット
X軸(従動軸)X軸(従動軸)
(19
.5)
(5.5)
(φ
6.4)
【移動端ブラケット詳細図とベア断面図】
(81.5)
(28)
(68)
18 (21)
54
ユーザースペース
2-M6用皿穴
(22)
(φ
11.8
)
BA□□/BB□□BC□□/BD□□/BE□□/BF□□BG□□/BH□□/BK□□/BL□□/BM□□GB□□GC□□/GD□□/GE□□/GF□□GG□□/GH□□
73
83
83
73
83
83
54
65
80
54
65
80
組合せタイプ A寸法 B寸法〈表の記号説明〉
3軸組合せ
4軸組合せ 6軸組合せ
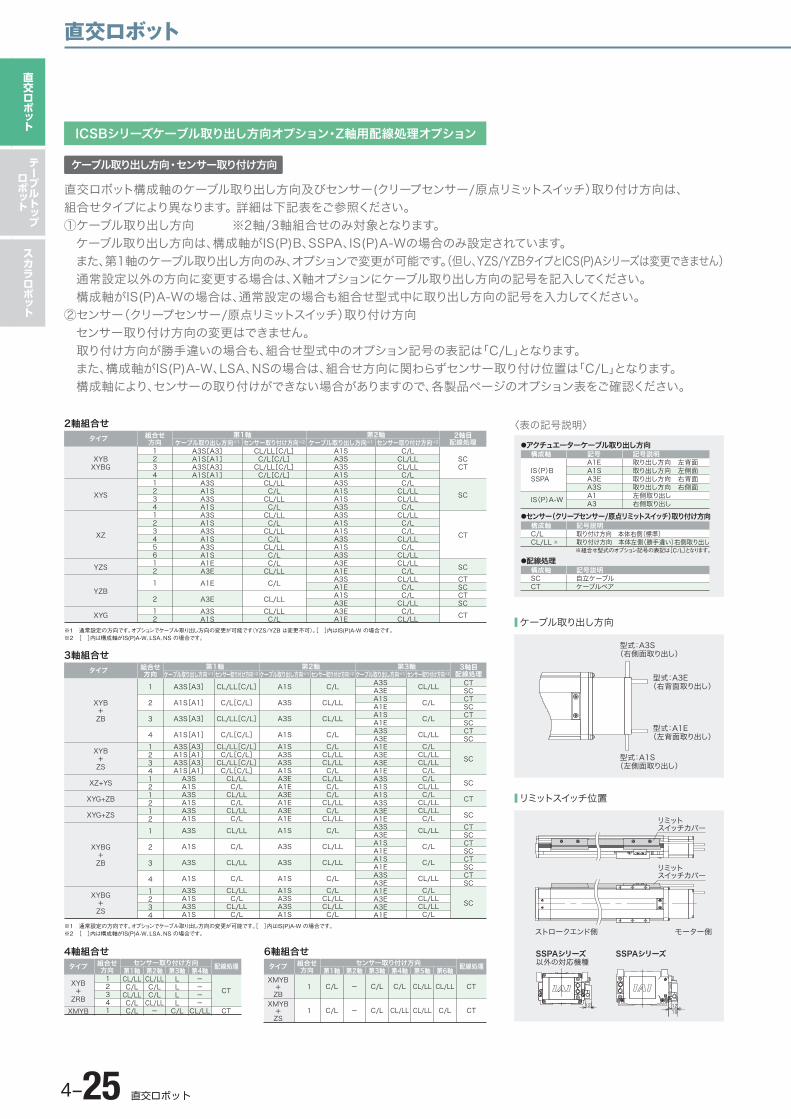
直交ロボット構成軸のケーブル取り出し方向及びセンサー(クリープセンサー/原点リミットスイッチ)取り付け方向は、組合せタイプにより異なります。 詳細は下記表をご参照ください。①ケーブル取り出し方向 ※2軸/3軸組合せのみ対象となります。
ケーブル取り出し方向は、構成軸がIS(P)B、SSPA、IS(P)A-Wの場合のみ設定されています。また、第1軸のケーブル取り出し方向のみ、オプションで変更が可能です。(但し、YZS/YZBタイプとICS(P)Aシリーズは変更できません)通常設定以外の方向に変更する場合は、X軸オプションにケーブル取り出し方向の記号を記入してください。構成軸がIS(P)A-Wの場合は、通常設定の場合も組合せ型式中に取り出し方向の記号を入力してください。
②センサー(クリープセンサー/原点リミットスイッチ)取り付け方向センサー取り付け方向の変更はできません。取り付け方向が勝手違いの場合も、組合せ型式中のオプション記号の表記は「C/L」となります。また、構成軸がIS(P)A-W、LSA、NSの場合は、組合せ方向に関わらずセンサー取り付け位置は「C/L」となります。構成軸により、センサーの取り付けができない場合がありますので、各製品ページのオプション表をご確認ください。
A3SA3EA1SA1EA1SA1EA3SA3EA1EA3EA3EA1EA3SA1SA1SA3SA3EA1EA3SA3EA1SA1EA1SA1EA3SA3EA1EA3EA3EA1E
CL/LL
C/L
C/L
CL/LLC/L
CL/LLCL/LLC/LC/L
CL/LLC/L
CL/LLCL/LLC/L
CL/LL
C/L
C/L
CL/LLC/L
CL/LLCL/LLC/L
C/L
CL/LL
CL/LL
C/LC/L
CL/LLCL/LLC/L
CL/LLC/LC/L
CL/LLC/L
CL/LLC/L
CL/LL
CL/LL
C/LC/L
CL/LLCL/LLC/L
A1S
A3S
A3S
A1SA1SA3SA3SA1SA3EA1EA3EA1EA3EA1EA1S
A3S
A3S
A1SA1SA3SA3SA1S
CL/LL[C/L]
C/L[C/L]
CL/LL[C/L]
C/L[C/L]CL/LL[C/L]C/L[C/L]
CL/LL[C/L]C/L[C/L]
CL/LLC/L
CL/LLC/L
CL/LLC/L
CL/LL
C/L
CL/LL
C/LCL/LLC/L
CL/LLC/L
A3S[A3]
A1S[A1]
A3S[A3]
A1S[A1]A3S[A3]A1S[A1]A3S[A3]A1S[A1]
A3SA1SA3SA1SA3SA1SA3S
A1S
A3S
A1SA3SA1SA3SA1S
1
2
3
412341212121
2
3
41234
CTSCCTSCCTSCCTSC
SC
SC
CT
SCCTSCCTSCCTSCCTSC
SC
XYB+ZB
XYB+ZS
XZ+YS
XYG+ZB
XYG+ZS
XYBG+ZB
XYBG+ZS
タイプ 組合せ方向 ケーブル取り出し方向※1 センサー取り付け方向※2 ケーブル取り出し方向※1 センサー取り付け方向※2 ケーブル取り出し方向※1 センサー取り付け方向※2
3軸目配線処理
第1軸 第2軸
タイプ 組合せ方向 第1軸 第2軸 第3軸 第4軸
センサー取り付け方向 配線処理
第3軸
2軸組合せ
12341234123456121
212
A1SA3SA3SA1SA3SA1SA1SA3SA3SA1SA1SA3SA1SA3SA3EA1EA3SA1EA1SA3EA3EA1E
C/LCL/LLCL/LLC/LC/L
CL/LLCL/LLC/L
CL/LLC/LC/L
CL/LLC/L
CL/LLCL/LLC/L
CL/LLC/LC/L
CL/LLC/L
CL/LL
CL/LL[C/L]C/L[C/L]
CL/LL[C/L]C/L[C/L]
CL/LLC/L
CL/LLC/L
CL/LLC/L
CL/LLC/L
CL/LLC/LC/L
CL/LLC/L
CL/LLCL/LLC/L
A3S[A3]A1S[A1]A3S[A3]A1S[A1]
A3SA1SA3SA1SA3SA1SA3SA1SA3SA1SA1EA3EA1E
A3EA3SA1S
SCCT
SC
CT
SCCTSCCTSCCT
XYBXYBG
XYS
XZ
YZS
YZB
XYG
タイプ 組合せ方向 ケーブル取り出し方向※1 センサー取り付け方向※2 ケーブル取り出し方向※1 センサー取り付け方向※2
2軸目配線処理
第1軸 第2軸
型式:A1S(左側面取り出し)
型式:A1E(左背面取り出し)
型式:A3S(右側面取り出し)
型式:A3E(右背面取り出し)
■ ケーブル取り出し方向
12
SSPAシリーズ SSPAシリーズ
1219
リミットスイッチカバー
ストロークエンド側 モーター側
以外の対応機種
リミットスイッチカバー
■ リミットスイッチ位置
ICSBシリーズケーブル取り出し方向オプション・Z軸用配線処理オプション
ケーブル取り出し方向・センサー取り付け方向
Z軸用配線処理オプション
直交ロボット-コントローラー間ケーブル ※ICS(P)Bのみ選択可
●アクチュエーターケーブル取り出し方向
●センサー(クリープセンサー/原点リミットスイッチ)取り付け方向構成軸 記号説明C/L 取り付け方向 本体右側(標準)CL/LL ※ 取り付け方向 本体左側(勝手違い)右側取り出し
●配線処理
構成軸 記号 記号説明 A1E 取り出し方向 左背面IS(P)B A1S 取り出し方向 左側面SSPA A3E 取り出し方向 右背面 A3S 取り出し方向 右側面IS(P)A-W A1 左側取り出し A3 右側取り出し
構成軸 記号説明SC 自立ケーブルCT ケーブルベア
※組合せ型式のオプション記号の表記は[C/L]となります。
※1 通常設定の方向です。オプションでケーブル取り出し方向の変更が可能です(YZS/YZB は変更不可)。[ ]内はIS(P)A-W の場合です。※2 [ ]内は構成軸がIS(P)A-W、LSA、NS の場合です。
※1 通常設定の方向です。オプションでケーブル取り出し方向の変更が可能です。[ ]内はIS(P)A-W の場合です。※2 [ ]内は構成軸がIS(P)A-W、LSA、NS の場合です。
XYB+
ZRBXMYB
CL/LL CL/LL L - C/L C/L L - CL/LL C/L L - CT C/L CL/LL L - C/L - C/L CL/LL CT
12341
タイプ 組合せ方向 第1軸 第2軸 第3軸 第4軸 第5軸 第6軸
センサー取り付け方向 配線処理
XMYB+ZB
XMYB+ZS
C/L - C/L C/L CL/LL CL/LL CT C/L - C/L CL/LL CL/LL C/L CT
1
1
HP リンク _ICSB シリーズ _ケーブル取出し方向・センサ取付方向
直交ロボット
直交ロボット 4-26
直交ロボット
テーブルトップ
ロボット
スカラロボット
直交ロボット-コントローラー間のケーブルは、各構成軸毎に単軸ロボット用ケーブルを使用して接続します。
《ケーブルベア仕様》Y軸及びZ軸のモーターケーブル、エンコーダーケーブルは、X軸のコネクターボックスの中で接続されます。《自立ケーブル仕様》
コントローラー
(30
0)
モーターケーブル〈型式CB-X-MA□□□〉エンコーダーケーブル
〈型式CB-X1-PA□□□〉(標準)〈型式CB-X1-PLA□□□〉(LS付)
モーターケーブル〈型式CB-X-MA□□□〉エンコーダーケーブル
〈型式CB-X1-PA□□□〉(標準)〈型式CB-X1-PLA□□□〉(LS付)
(30
0)
コントローラー
モータージョイントケーブル〈型式CB-X-MA□□□-JY1〉エンコーダージョイントケーブル
〈型式CB-X1-PA□□□-JY1〉LS付エンコーダージョイントケーブル
〈型式CB-X1-PLA□□□-JY1〉設定長さ 0.5m/1m/1.5m/2m
モーターケーブル〈型式CB-X-MA□□□〉エンコーダーケーブル
〈型式CB-X1-PA□□□〉(標準)〈型式CB-X1-PLA□□□〉(LS付)
モーターケーブル〈型式CB-X-MA□□□〉エンコーダーケーブル
〈型式CB-X1-PA□□□〉(標準)〈型式CB-X1-PLA□□□〉(LS付)
モーターケーブル/エンコーダーケーブルの長さはX軸、Y/Z軸共同一ですので、配線の取りまわしにより片方が短かくなる場合は、ジョイントケーブルを設定していますのでご使用ください。
※
※ICS(P)B2のみ選択可
XYB、XYBG、XYGのY軸スライダーに、お客さまが機器を装着される場合の、配線用ケーブルベアをオプション設定しました。
《組合せタイプ:XYG-G1J/G2J》《組合せタイプ:XYB、XYBG》
A
B
(81.5)
X軸
Y軸
移動端ブラケット
R48
(116.5)(144.5)
X軸
(φ
6.4)
(19
.5)
(5.5)【移動端ブラケット詳細図とベア断面図】
(93.5)(2
8)(80)
18 (21)
66
ユーザースペース
2-M6用皿穴
(11
.8)
(22)
R75
(116.5)(144.5)
129.5
(93.5)
X軸(駆動軸) X軸(駆動軸)
Y軸
ST/2
+125
移動端ブラケット
X軸(従動軸)X軸(従動軸)
(19
.5)
(5.5)
(φ
6.4)
【移動端ブラケット詳細図とベア断面図】
(81.5)
(28)
(68)
18 (21)
54
ユーザースペース
2-M6用皿穴
(22)
(φ
11.8
)
BA□□/BB□□BC□□/BD□□/BE□□/BF□□BG□□/BH□□/BK□□/BL□□/BM□□GB□□GC□□/GD□□/GE□□/GF□□GG□□/GH□□
73
83
83
73
83
83
54
65
80
54
65
80
組合せタイプ A寸法 B寸法〈表の記号説明〉
3軸組合せ
4軸組合せ 6軸組合せ
直交ロボット構成軸のケーブル取り出し方向及びセンサー(クリープセンサー/原点リミットスイッチ)取り付け方向は、組合せタイプにより異なります。 詳細は下記表をご参照ください。①ケーブル取り出し方向 ※2軸/3軸組合せのみ対象となります。
ケーブル取り出し方向は、構成軸がIS(P)B、SSPA、IS(P)A-Wの場合のみ設定されています。また、第1軸のケーブル取り出し方向のみ、オプションで変更が可能です。(但し、YZS/YZBタイプとICS(P)Aシリーズは変更できません)通常設定以外の方向に変更する場合は、X軸オプションにケーブル取り出し方向の記号を記入してください。構成軸がIS(P)A-Wの場合は、通常設定の場合も組合せ型式中に取り出し方向の記号を入力してください。
②センサー(クリープセンサー/原点リミットスイッチ)取り付け方向センサー取り付け方向の変更はできません。取り付け方向が勝手違いの場合も、組合せ型式中のオプション記号の表記は「C/L」となります。また、構成軸がIS(P)A-W、LSA、NSの場合は、組合せ方向に関わらずセンサー取り付け位置は「C/L」となります。構成軸により、センサーの取り付けができない場合がありますので、各製品ページのオプション表をご確認ください。
A3SA3EA1SA1EA1SA1EA3SA3EA1EA3EA3EA1EA3SA1SA1SA3SA3EA1EA3SA3EA1SA1EA1SA1EA3SA3EA1EA3EA3EA1E
CL/LL
C/L
C/L
CL/LLC/L
CL/LLCL/LLC/LC/L
CL/LLC/L
CL/LLCL/LLC/L
CL/LL
C/L
C/L
CL/LLC/L
CL/LLCL/LLC/L
C/L
CL/LL
CL/LL
C/LC/L
CL/LLCL/LLC/L
CL/LLC/LC/L
CL/LLC/L
CL/LLC/L
CL/LL
CL/LL
C/LC/L
CL/LLCL/LLC/L
A1S
A3S
A3S
A1SA1SA3SA3SA1SA3EA1EA3EA1EA3EA1EA1S
A3S
A3S
A1SA1SA3SA3SA1S
CL/LL[C/L]
C/L[C/L]
CL/LL[C/L]
C/L[C/L]CL/LL[C/L]C/L[C/L]
CL/LL[C/L]C/L[C/L]
CL/LLC/L
CL/LLC/L
CL/LLC/L
CL/LL
C/L
CL/LL
C/LCL/LLC/L
CL/LLC/L
A3S[A3]
A1S[A1]
A3S[A3]
A1S[A1]A3S[A3]A1S[A1]A3S[A3]A1S[A1]
A3SA1SA3SA1SA3SA1SA3S
A1S
A3S
A1SA3SA1SA3SA1S
1
2
3
412341212121
2
3
41234
CTSCCTSCCTSCCTSC
SC
SC
CT
SCCTSCCTSCCTSCCTSC
SC
XYB+ZB
XYB+ZS
XZ+YS
XYG+ZB
XYG+ZS
XYBG+ZB
XYBG+ZS
タイプ 組合せ方向 ケーブル取り出し方向※1 センサー取り付け方向※2 ケーブル取り出し方向※1 センサー取り付け方向※2 ケーブル取り出し方向※1 センサー取り付け方向※2
3軸目配線処理
第1軸 第2軸
タイプ 組合せ方向 第1軸 第2軸 第3軸 第4軸
センサー取り付け方向 配線処理
第3軸
2軸組合せ
12341234123456121
212
A1SA3SA3SA1SA3SA1SA1SA3SA3SA1SA1SA3SA1SA3SA3EA1EA3SA1EA1SA3EA3EA1E
C/LCL/LLCL/LLC/LC/L
CL/LLCL/LLC/L
CL/LLC/LC/L
CL/LLC/L
CL/LLCL/LLC/L
CL/LLC/LC/L
CL/LLC/L
CL/LL
CL/LL[C/L]C/L[C/L]
CL/LL[C/L]C/L[C/L]
CL/LLC/L
CL/LLC/L
CL/LLC/L
CL/LLC/L
CL/LLC/LC/L
CL/LLC/L
CL/LLCL/LLC/L
A3S[A3]A1S[A1]A3S[A3]A1S[A1]
A3SA1SA3SA1SA3SA1SA3SA1SA3SA1SA1EA3EA1E
A3EA3SA1S
SCCT
SC
CT
SCCTSCCTSCCT
XYBXYBG
XYS
XZ
YZS
YZB
XYG
タイプ 組合せ方向 ケーブル取り出し方向※1 センサー取り付け方向※2 ケーブル取り出し方向※1 センサー取り付け方向※2
2軸目配線処理
第1軸 第2軸
型式:A1S(左側面取り出し)
型式:A1E(左背面取り出し)
型式:A3S(右側面取り出し)
型式:A3E(右背面取り出し)
■ ケーブル取り出し方向
12
SSPAシリーズ SSPAシリーズ
1219
リミットスイッチカバー
ストロークエンド側 モーター側
以外の対応機種
リミットスイッチカバー
■ リミットスイッチ位置
ICSBシリーズケーブル取り出し方向オプション・Z軸用配線処理オプション
ケーブル取り出し方向・センサー取り付け方向
Z軸用配線処理オプション
直交ロボット-コントローラー間ケーブル ※ICS(P)Bのみ選択可
●アクチュエーターケーブル取り出し方向
●センサー(クリープセンサー/原点リミットスイッチ)取り付け方向構成軸 記号説明C/L 取り付け方向 本体右側(標準)CL/LL ※ 取り付け方向 本体左側(勝手違い)右側取り出し
●配線処理
構成軸 記号 記号説明 A1E 取り出し方向 左背面IS(P)B A1S 取り出し方向 左側面SSPA A3E 取り出し方向 右背面 A3S 取り出し方向 右側面IS(P)A-W A1 左側取り出し A3 右側取り出し
構成軸 記号説明SC 自立ケーブルCT ケーブルベア
※組合せ型式のオプション記号の表記は[C/L]となります。
※1 通常設定の方向です。オプションでケーブル取り出し方向の変更が可能です(YZS/YZB は変更不可)。[ ]内はIS(P)A-W の場合です。※2 [ ]内は構成軸がIS(P)A-W、LSA、NS の場合です。
※1 通常設定の方向です。オプションでケーブル取り出し方向の変更が可能です。[ ]内はIS(P)A-W の場合です。※2 [ ]内は構成軸がIS(P)A-W、LSA、NS の場合です。
XYB+
ZRBXMYB
CL/LL CL/LL L - C/L C/L L - CL/LL C/L L - CT C/L CL/LL L - C/L - C/L CL/LL CT
12341
タイプ 組合せ方向 第1軸 第2軸 第3軸 第4軸 第5軸 第6軸
センサー取り付け方向 配線処理
XMYB+ZB
XMYB+ZS
C/L - C/L C/L CL/LL CL/LL CT C/L - C/L CL/LL CL/LL C/L CT
1
1
HP リンク _ICSB シリーズ _Z軸用配線処理オプション
直交ロボット
4-533 直交ロボット
直交ロボット
テーブルトップ
ロボット
スカラロボット
直交ロボット
直交ロボット 4-534
直交ロボット
テーブルトップ
ロボット
スカラロボット
直交ロボット オプション
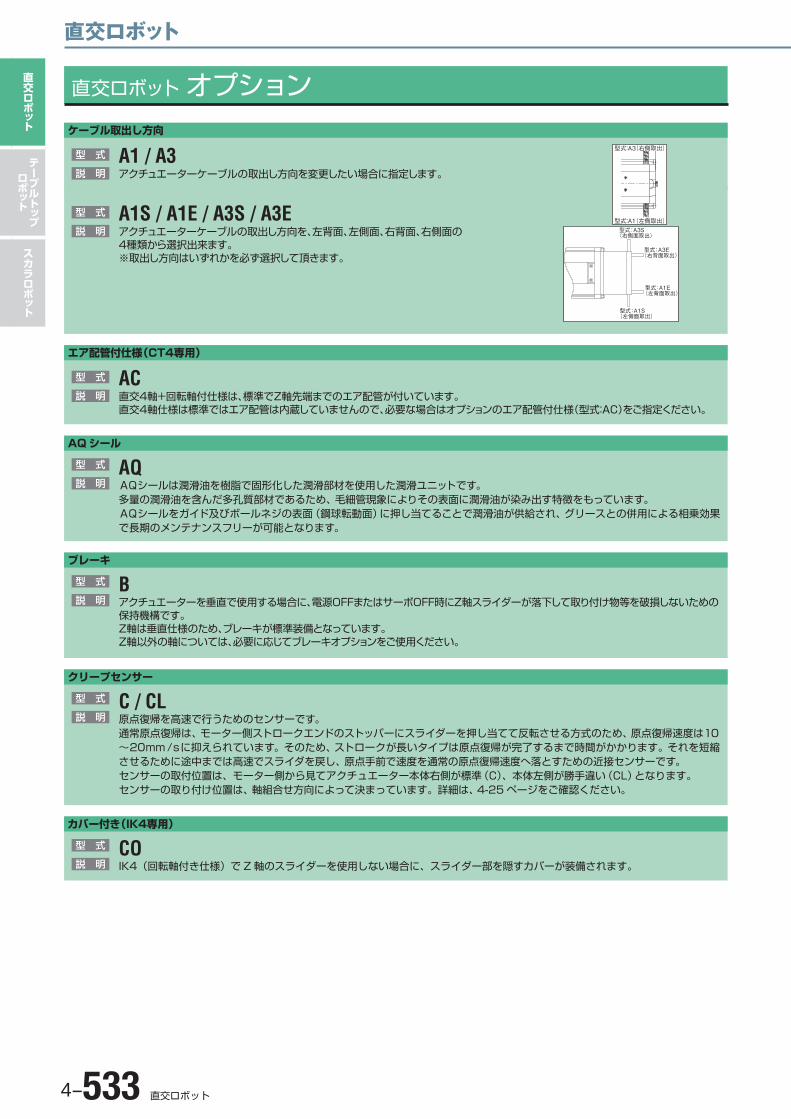
ブレーキ
型 式
説 明 アクチュエーターを垂直で使用する場合に、電源OFFまたはサーボOFF時にZ軸スライダーが落下して取り付け物等を破損しないための保持機構です。Z軸は垂直仕様のため、ブレーキが標準装備となっています。Z軸以外の軸については、必要に応じてブレーキオプションをご使用ください。
B
カバー付き(IK4専用)
型 式
説 明 IK4(回転軸付き仕様)で Z 軸のスライダーを使用しない場合に、スライダー部を隠すカバーが装備されます。CO
HP リンク _オプション _先頭 P
AQ シール
型 式
説 明 AQシールは潤滑油を樹脂で固形化した潤滑部材を使用した潤滑ユニットです。多量の潤滑油を含んだ多孔質部材であるため、毛細管現象によりその表面に潤滑油が染み出す特徴をもっています。AQシールをガイド及びボールネジの表面(鋼球転動面)に押し当てることで潤滑油が供給され、グリースとの併用による相乗効果で長期のメンテナンスフリーが可能となります。
AQ
クリープセンサー
型 式
説 明 原点復帰を高速で行うためのセンサーです。通常原点復帰は、モーター側ストロークエンドのストッパーにスライダーを押し当てて反転させる方式のため、原点復帰速度は10〜20mm/sに抑えられています。そのため、ストロークが長いタイプは原点復帰が完了するまで時間がかかります。それを短縮させるために途中までは高速でスライダを戻し、原点手前で速度を通常の原点復帰速度へ落とすための近接センサーです。センサーの取付位置は、モーター側から見てアクチュエーター本体右側が標準(C)、本体左側が勝手違い(CL)となります。センサーの取り付け位置は、軸組合せ方向によって決まっています。詳細は、4-25 ページをご確認ください。
C / CL
ケーブル取出し方向
アクチュエーターケーブルの取出し方向を変更したい場合に指定します。説 明
型 式 A1 / A3
180±0.02
310135160 I
I
(7)SEME
(7)
130
2-M5 深さ10
m-φ9K
2-φ8H7リーマ2-φ8H7リーマ
14
2-φ8H7リーマ 深さ10 8-M8 深さ30ME※2原点
100以上確保
164196
9090
N×200
L(ストローク+440)
30 120 3010 160 10
60 235
335
41 ストローク
50 65 20
118.5
180
180 219 (300)
198A
50
120
PP
反対側も同様
(φ9)
φ18
8
ベース取付け穴部詳細
10
R42
8H7
R4
P部詳細A部詳細
1715
4.3
67.3
1.5 4.5
6基準面
ケーブルジョイントコネクタ※1
ケーブル右側取出記号:A3
ケーブル左側取出記号:A1
型式:A3(右側取出)
型式:A1(左側取出)
アクチュエーターケーブルの取出し方向を、左背面、左側面、右背面、右側面の4種類から選択出来ます。※取出し方向はいずれかを必ず選択して頂きます。
説 明
型 式 A1S / A1E / A3S / A3E
型式:A1S(左側面取出)
型式:A1E(左背面取出)
型式:A3S(右側面取出)
型式:A3E(右背面取出)
エア配管付仕様(CT4専用)
直交4軸+回転軸付仕様は、標準でZ軸先端までのエア配管が付いています。直交4軸仕様は標準ではエア配管は内蔵していませんので、必要な場合はオプションのエア配管付仕様(型式:AC)をご指定ください。
説 明
型 式 AC
直交ロボット
直交ロボット 4-534
直交ロボット
テーブルトップ
ロボット
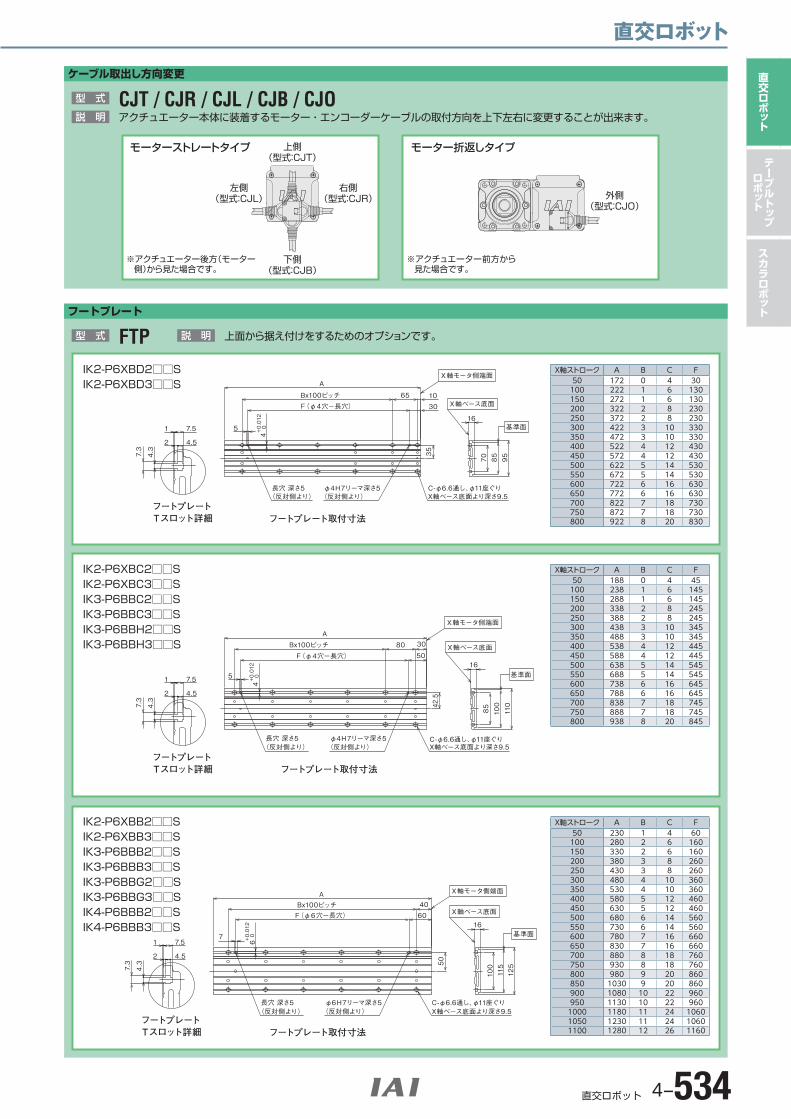
スカラロボットフートプレート
上面から据え付けをするためのオプションです。説 明型 式 FTP
フートプレートTスロット詳細 フートプレート取付寸法
70 85
95
16
2 4.5
7.51
4.3
7.3
φ4H7リーマ深さ5(反対側より)
C-φ6.6通し、φ11座ぐりX軸ベース底面より深さ9.5
5
4+0
.012
0
長穴 深さ5(反対側より)
F(φ4穴-長穴) 301065Bx100ピッチ
A
35
X軸モータ側端面
X軸ベース底面
基準面
フートプレート取付寸法
85
100
110
5
4+
0.01
2 0
42.5
50F(φ4穴-長穴)
3080Bx100ピッチA
φ4H7リーマ深さ5(反対側より)
長穴 深さ5(反対側より)
C-φ6.6通し、φ11座ぐりX軸ベース底面より深さ9.5
フートプレートTスロット詳細
2 4.5
7.51
4.3
7.3
X軸モータ側端面
X軸ベース底面
基準面16
IK2-P6XBD2□□SIK2-P6XBD3□□S
IK2-P6XBC2□□SIK2-P6XBC3□□SIK3-P6BBC2□□SIK3-P6BBC3□□SIK3-P6BBH2□□SIK3-P6BBH3□□S
X軸ストローク A B C F50 172 0 4 30100 222 1 6 130150 272 1 6 130200 322 2 8 230250 372 2 8 230300 422 3 10 330350 472 3 10 330400 522 4 12 430450 572 4 12 430500 622 5 14 530550 672 5 14 530600 722 6 16 630650 772 6 16 630700 822 7 18 730750 872 7 18 730800 922 8 20 830
X軸ストローク A B C F50 188 0 4 45100 238 1 6 145150 288 1 6 145200 338 2 8 245250 388 2 8 245300 438 3 10 345350 488 3 10 345400 538 4 12 445450 588 4 12 445500 638 5 14 545550 688 5 14 545600 738 6 16 645650 788 6 16 645700 838 7 18 745750 888 7 18 745800 938 8 20 845
ケーブル取出し方向変更
アクチュエーター本体に装着するモーター・エンコーダーケーブルの取付方向を上下左右に変更することが出来ます。説 明
型 式 CJT / CJR / CJL / CJB / CJO
モーターストレートタイプ モーター折返しタイプ
※アクチュエーター後方(モーター側)から見た場合です。
※アクチュエーター前方から見た場合です。
外側(型式:CJO)
上側(型式:CJT)
下側(型式:CJB)
左側(型式:CJL)
右側(型式:CJR)
フートプレート取付寸法
125
1155
0
60F(φ6穴-長穴)
6+0.0
12 07
40Bx100ピッチA
φ6H7リーマ深さ5(反対側より)
C-φ6.6通し、φ11座ぐりX軸ベース底面より深さ9.5
長穴 深さ5(反対側より)
100
フートプレートTスロット詳細
2 4.5
7.51
4.3
7.3
X軸モータ側端面
X軸ベース底面
基準面16
IK2-P6XBB2□□SIK2-P6XBB3□□SIK3-P6BBB2□□SIK3-P6BBB3□□SIK3-P6BBG2□□SIK3-P6BBG3□□SIK4-P6BBB2□□SIK4-P6BBB3□□S
X軸ストローク A B C F50 230 1 4 60100 280 2 6 160150 330 2 6 160200 380 3 8 260250 430 3 8 260300 480 4 10 360350 530 4 10 360400 580 5 12 460450 630 5 12 460500 680 6 14 560550 730 6 14 560600 780 7 16 660650 830 7 16 660700 880 8 18 760750 930 8 18 760800 980 9 20 860850 1030 9 20 860900 1080 10 22 960950 1130 10 22 9601000 1180 11 24 10601050 1230 11 24 10601100 1280 12 26 1160
直交ロボット
4-535 直交ロボット
直交ロボット
テーブルトップ
ロボット
スカラロボット
直交ロボット
直交ロボット 4-536
直交ロボット
テーブルトップ
ロボット
スカラロボット
16
16
20.5
16
8.5
16
20.5
16
14
16
8.5
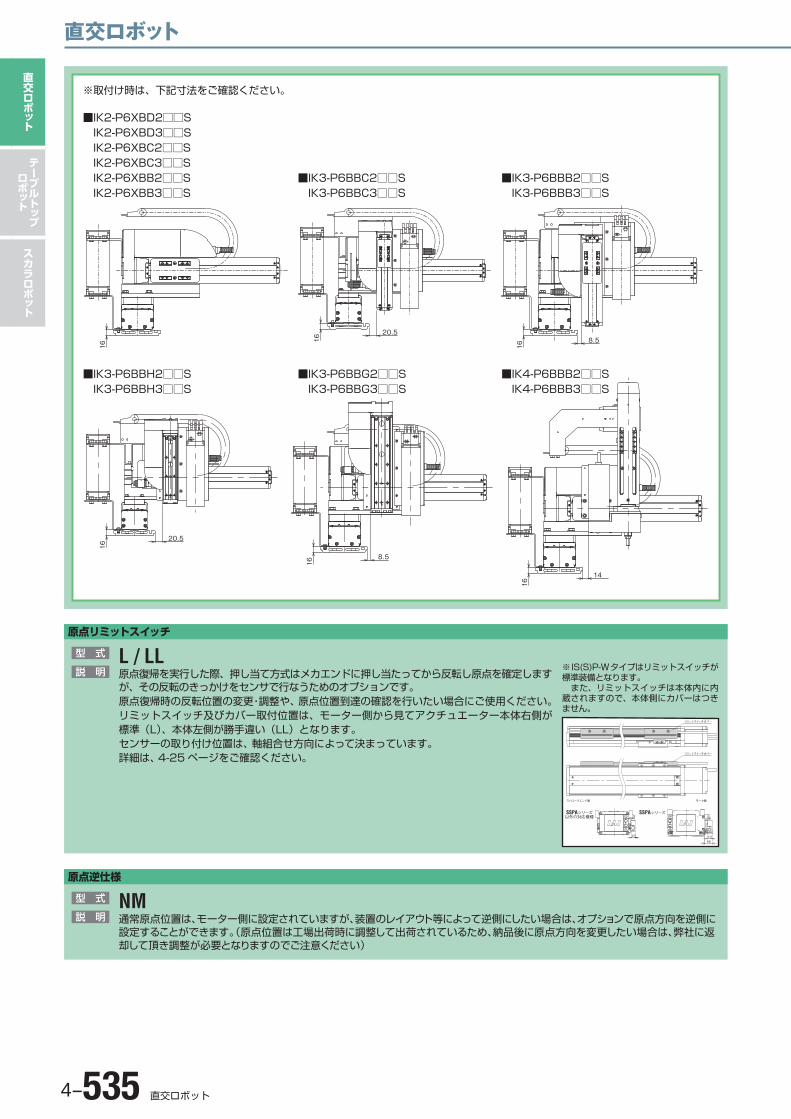
※取付け時は、下記寸法をご確認ください。
■IK3-P6BBH2□□S IK3-P6BBH3□□S
■IK3-P6BBG2□□S IK3-P6BBG3□□S
■IK4-P6BBB2□□S IK4-P6BBB3□□S
■IK2-P6XBD2□□S IK2-P6XBD3□□S IK2-P6XBC2□□S IK2-P6XBC3□□S IK2-P6XBB2□□S IK2-P6XBB3□□S
■IK3-P6BBC2□□S IK3-P6BBC3□□S
■IK3-P6BBB2□□S IK3-P6BBB3□□S
原点リミットスイッチ
型 式
説 明L / LL原点復帰を実行した際、押し当て方式はメカエンドに押し当たってから反転し原点を確定しますが、その反転のきっかけをセンサで行なうためのオプションです。原点復帰時の反転位置の変更・調整や、原点位置到達の確認を行いたい場合にご使用ください。リミットスイッチ及びカバー取付位置は、モーター側から見てアクチュエーター本体右側が標準(L)、本体左側が勝手違い(LL)となります。センサーの取り付け位置は、軸組合せ方向によって決まっています。詳細は、4-25 ページをご確認ください。
12
SSPAシリーズ以外の対応機種
SSPAシリーズ
1219
リミットスイッチカバー
リミットスイッチカバー
ストロークエンド側 モータ側
※IS(S)P-Wタイプはリミットスイッチが標準装備となります。 また、リミットスイッチは本体内に内蔵されますので、本体側にカバーはつきません。
原点逆仕様
型 式
説 明 通常原点位置は、モーター側に設定されていますが、装置のレイアウト等によって逆側にしたい場合は、オプションで原点方向を逆側に設定することができます。(原点位置は工場出荷時に調整して出荷されているため、納品後に原点方向を変更したい場合は、弊社に返却して頂き調整が必要となりますのでご注意ください)
NM
直交ロボット
直交ロボット 4-536
直交ロボット
テーブルトップ
ロボット
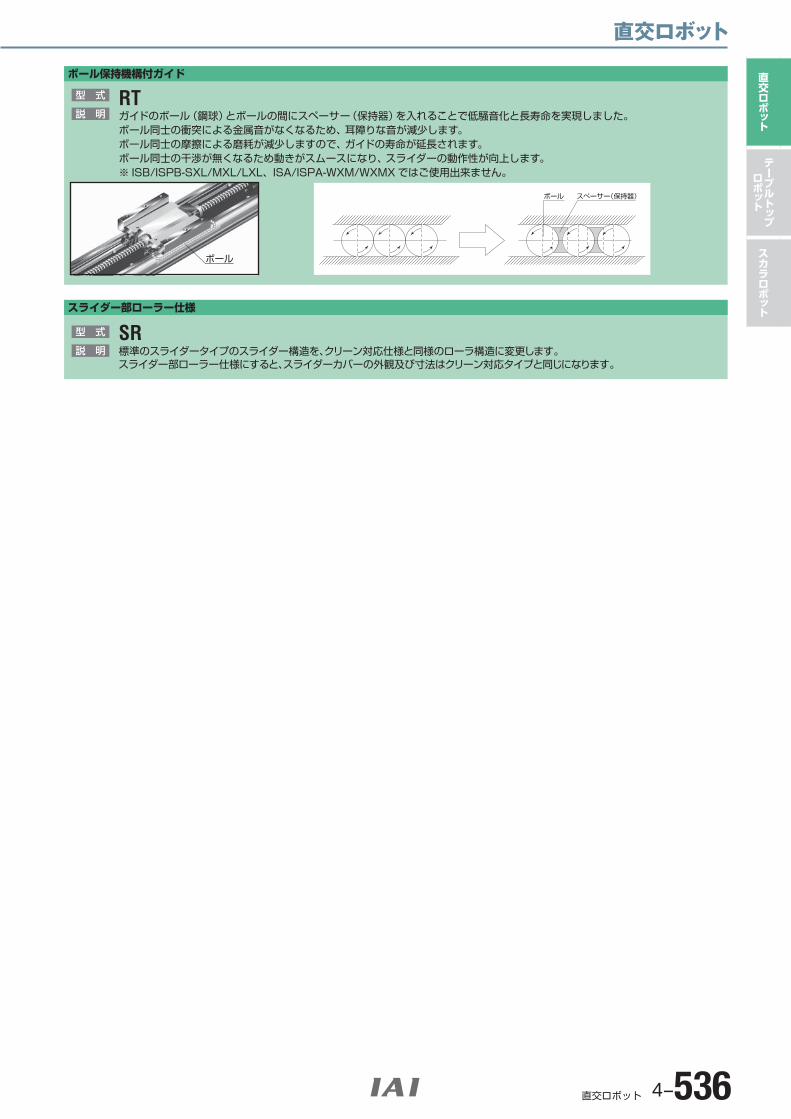
スカラロボットスライダー部ローラー仕様
標準のスライダータイプのスライダー構造を、クリーン対応仕様と同様のローラ構造に変更します。スライダー部ローラー仕様にすると、スライダーカバーの外観及び寸法はクリーン対応タイプと同じになります。
説 明
型 式 SR
ボール保持機構付ガイド
型 式
説 明 ガイドのボール(鋼球)とボールの間にスペーサー(保持器)を入れることで低騒音化と長寿命を実現しました。ボール同士の衝突による金属音がなくなるため、耳障りな音が減少します。ボール同士の摩擦による磨耗が減少しますので、ガイドの寿命が延長されます。ボール同士の干渉が無くなるため動きがスムースになり、スライダーの動作性が向上します。※ ISB/ISPB-SXL/MXL/LXL、ISA/ISPA-WXM/WXMX ではご使用出来ません。
RT
ボール スぺーサー(保持器)
ボール
直交ロボット
4-537 直交ロボット
直交ロボット
テーブルトップ
ロボット
スカラロボット
直交ロボット
直交ロボット 4-538
直交ロボット
テーブルトップ
ロボット
スカラロボット
資 料
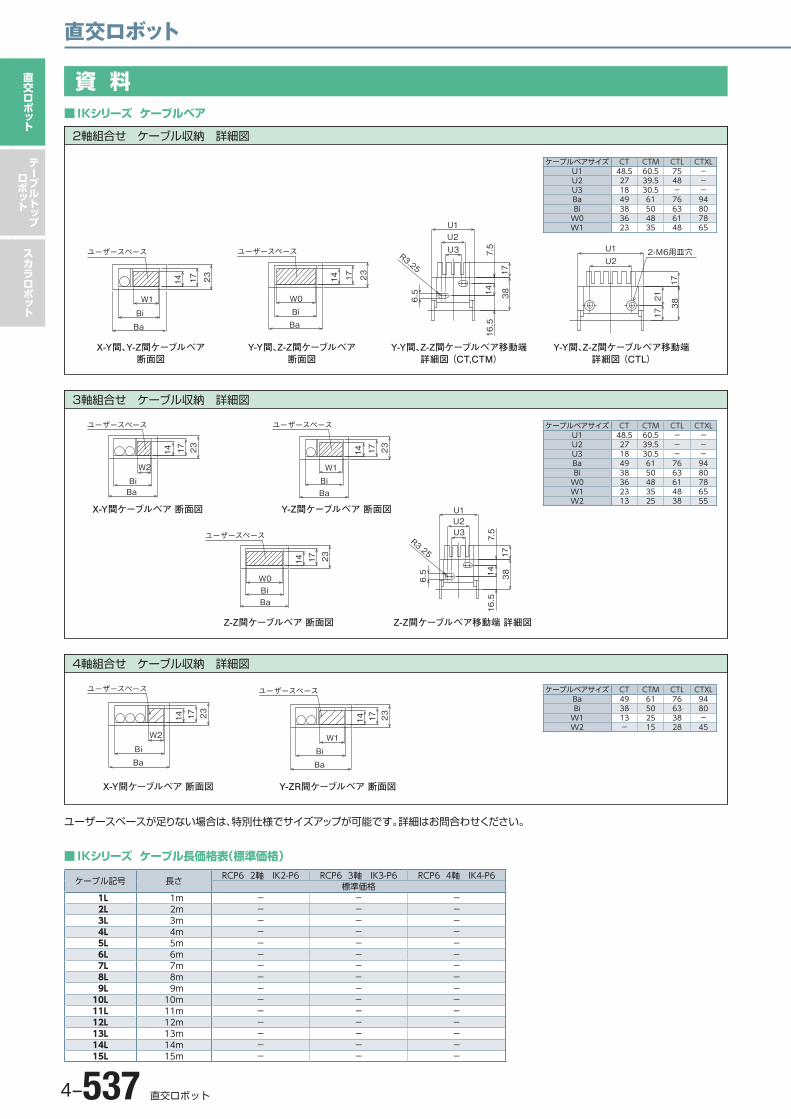
ケーブルベアサイズ CT CTM CTL CTXLU1 48.5 60.5 − −U2 27 39.5 − −U3 18 30.5 − −Ba 49 61 76 94Bi 38 50 63 80
W0 36 48 61 78W1 23 35 48 65W2 13 25 38 55
Y-Y間、Z-Z間ケーブルベア断面図
X-Y間、Y-Z間ケーブルベア断面図
Y-Y間、Z-Z間ケーブルベア移動端詳細図 (CT,CTM)
2-M6用皿穴
Y-Y間、Z-Z間ケーブルベア移動端詳細図 (CTL)
BiBa
17
W0
14 23
ユーザースペース
BaBi
14
W1
17 23
ユーザースペース
38
16.5
17
U1
6.5
U3U2
147.5
R3.25
U1U2
1738
1721
2軸組合せ ケーブル収納 詳細図
ケーブルベアサイズ CT CTM CTL CTXLU1 48.5 60.5 75 −U2 27 39.5 48 −U3 18 30.5 − −Ba 49 61 76 94Bi 38 50 63 80
W0 36 48 61 78W1 23 35 48 65
HP リンク _資料 _ケーブル長価格表
Y-ZR間ケーブルベア 断面図X-Y間ケーブルベア 断面図
W1BiBa
14 17 23
ユーザースペース
W2
BiBa
14 17 23
ユーザースペース
4軸組合せ ケーブル収納 詳細図
ケーブルベアサイズ CT CTM CTL CTXLBa 49 61 76 94Bi 38 50 63 80
W1 13 25 38 −W2 − 15 28 45
ユーザースペースが足りない場合は、特別仕様でサイズアップが可能です。詳細はお問合わせください。
■ IKシリーズ ケーブル長価格表(標準価格)
ケーブル記号 長さ RCP6 2軸 IK2-P6 RCP6 3軸 IK3-P6 RCP6 4軸 IK4-P6標準価格
1L 1m − − − 2L 2m − − − 3L 3m − − − 4L 4m − − − 5L 5m − − − 6L 6m − − − 7L 7m − − − 8L 8m − − − 9L 9m − − −10L 10m − − −11L 11m − − −12L 12m − − −13L 13m − − −14L 14m − − −15L 15m − − −
■ IKシリーズ ケーブルベア
Z-Z間ケーブルベア移動端 詳細図Z-Z間ケーブルベア 断面図
Y-Z間ケーブルベア 断面図X-Y間ケーブルベア 断面図
17
ユーザースペース
2314
W2
BiBa
ユーザースペース
17 2314
W0
BaBi
38
16.5
17U1
6.5
U3U2
147.5
R3.25
23
ユーザースペース
17
W1
14
BiBa
3軸組合せ ケーブル収納 詳細図
直交ロボット
直交ロボット 4-538
直交ロボット
テーブルトップ
ロボット
スカラロボット
(単位:mm)
型式記号CT(標準)CTMCTLCTXL
A567898123
B385878103
C87.7107.7127.7152.7
D79.299.2119.2144.2
E87.7107.7127.7152.7
F72.292.2112.2137.2
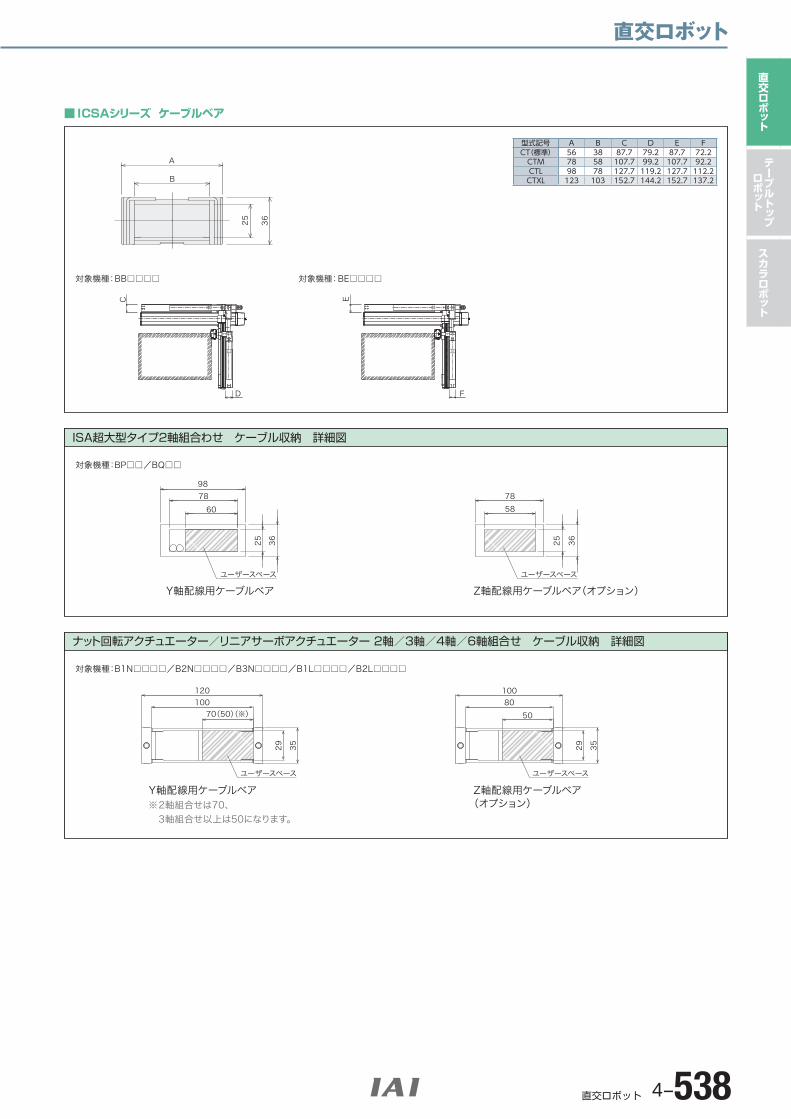
BB□□□□対象機種: BE□□□□対象機種:
対象機種:BP□□/BQ□□
Y軸配線用ケーブルベア Z軸配線用ケーブルベア(オプション)
対象機種:B1N□□□□/B2N□□□□/B3N□□□□/B1L□□□□/B2L□□□□
Z軸配線用ケーブルベア(オプション)
Y軸配線用ケーブルベア2軸組合せは70、3軸組合せ以上は50になります。
※
●ナット回転アクチュエーター/リニアサーボアクチュエーター 2軸/3軸/4軸/6軸組合せ
● ISA超大型タイプ2軸組合わせ
ユーザースペースユーザースペース
ユーザースペース ユーザースペース
987860
25 36
7858
25 36
10080
50
3529
36
B
A
25
D
C
F
E
12010070(50)(※)
29 35
■ ICSAシリーズ ケーブルベア
ISA超大型タイプ2軸組合わせ ケーブル収納 詳細図
ナット回転アクチュエーター/リニアサーボアクチュエーター 2軸/3軸/4軸/6軸組合せ ケーブル収納 詳細図
型式記号 A B C D E FCT(標準) 56 38 87.7 79.2 87.7 72.2
CTM 78 58 107.7 99.2 107.7 92.2CTL 98 78 127.7 119.2 127.7 112.2CTXL 123 103 152.7 144.2 152.7 137.2
直交ロボット
4-539 直交ロボット
直交ロボット
テーブルトップ
ロボット
スカラロボット
直交ロボット
直交ロボット 4-540
直交ロボット
テーブルトップ
ロボット
スカラロボット
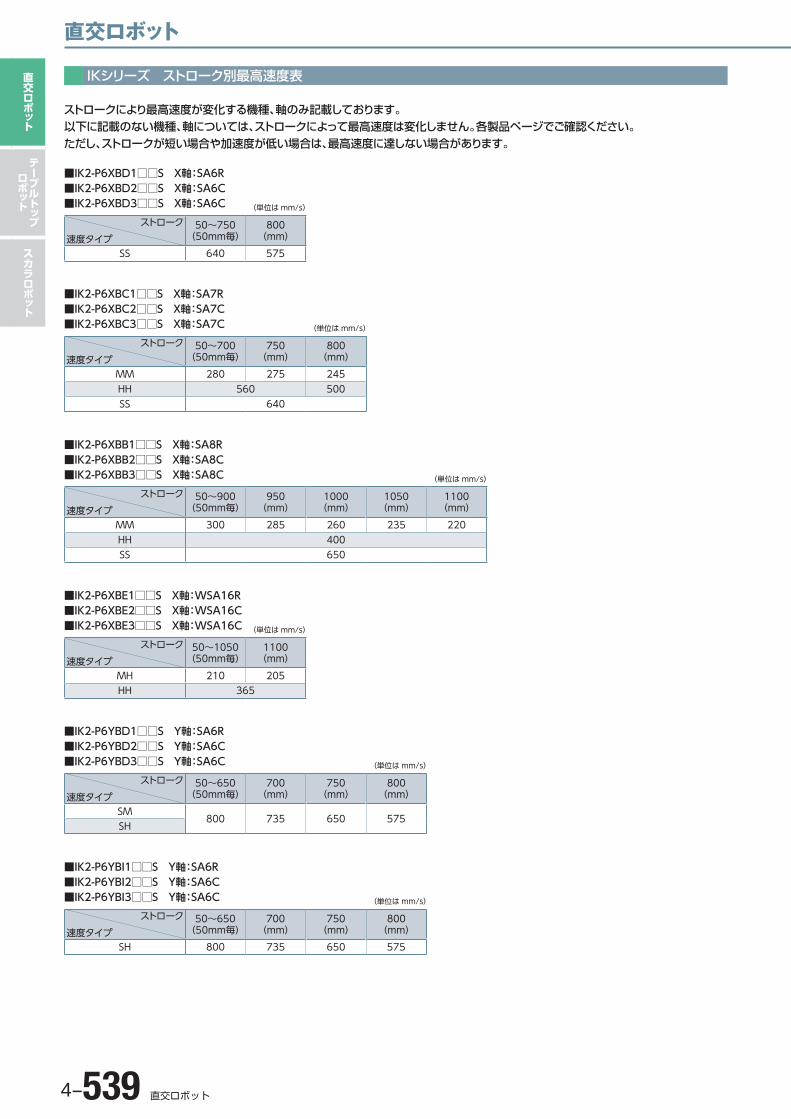
ストローク速度タイプ
50~750(50mm毎)
800(mm)
SS 640 575
ストローク速度タイプ
50~700(50mm毎)
750(mm)
800(mm)
MM 280 275 245HH 560 500SS 640
■IK2-P6XBD1□□S X軸:SA6R■IK2-P6XBD2□□S X軸:SA6C■IK2-P6XBD3□□S X軸:SA6C
■IK2-P6XBC1□□S X軸:SA7R■IK2-P6XBC2□□S X軸:SA7C■IK2-P6XBC3□□S X軸:SA7C
(単位は mm/s)
(単位は mm/s)
ストロークにより最高速度が変化する機種、軸のみ記載しております。以下に記載のない機種、軸については、ストロークによって最高速度は変化しません。各製品ページでご確認ください。 ただし、ストロークが短い場合や加速度が低い場合は、最高速度に達しない場合があります。
ストローク速度タイプ
50~1050(50mm毎)
1100(mm)
MH 210 205HH 365
ストローク速度タイプ
50~650(50mm毎)
700(mm)
750(mm)
800(mm)
SH 800 735 650 575
■IK2-P6XBE1□□S X軸:WSA16R■IK2-P6XBE2□□S X軸:WSA16C■IK2-P6XBE3□□S X軸:WSA16C
■IK2-P6YBI1□□S Y軸:SA6R■IK2-P6YBI2□□S Y軸:SA6C■IK2-P6YBI3□□S Y軸:SA6C
(単位は mm/s)
(単位は mm/s)
HP リンク _資料 _ストローク別最高速度表
ストローク速度タイプ
50~900(50mm毎)
950(mm)
1000(mm)
1050(mm)
1100(mm)
MM 300 285 260 235 220HH 400SS 650
■IK2-P6XBB1□□S X軸:SA8R■IK2-P6XBB2□□S X軸:SA8C■IK2-P6XBB3□□S X軸:SA8C (単位は mm/s)
ストローク速度タイプ
50~650(50mm毎)
700(mm)
750(mm)
800(mm)
SM800 735 650 575
SH
■IK2-P6YBD1□□S Y軸:SA6R■IK2-P6YBD2□□S Y軸:SA6C■IK2-P6YBD3□□S Y軸:SA6C (単位は mm/s)
IKシリーズ ストローク別最高速度表
直交ロボット
直交ロボット 4-540
直交ロボット
テーブルトップ
ロボット
スカラロボット
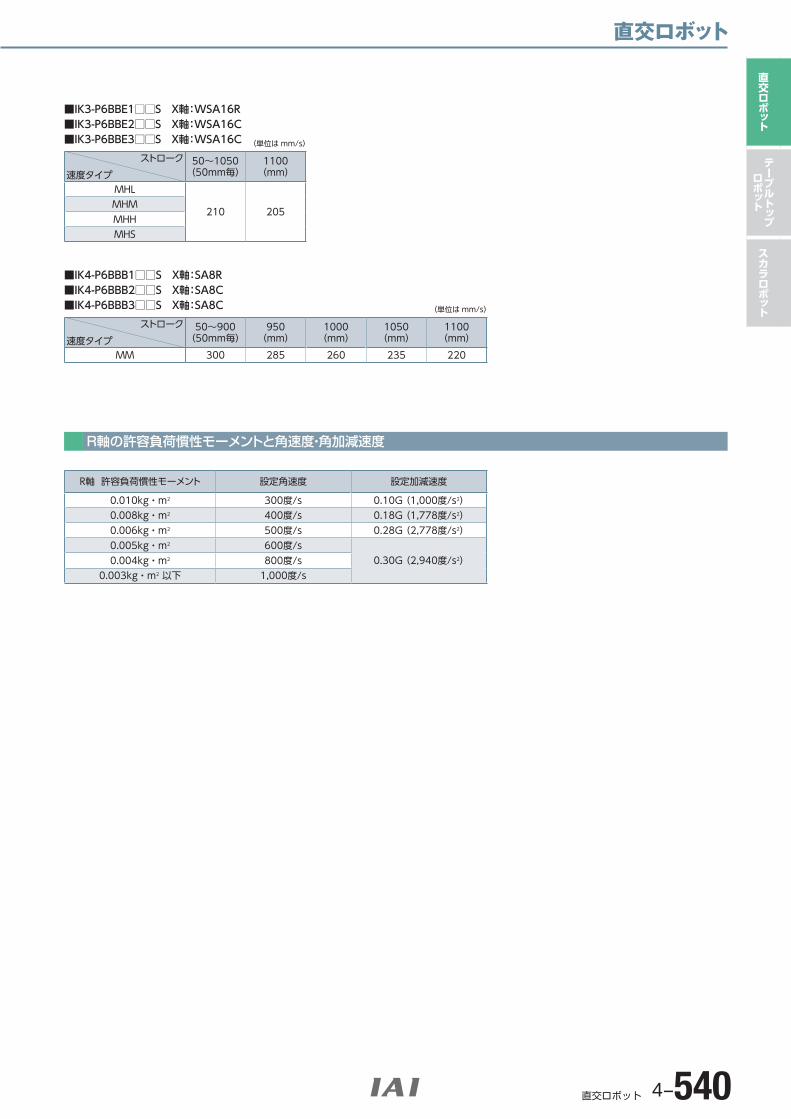
ストローク速度タイプ
50~900(50mm毎)
950(mm)
1000(mm)
1050(mm)
1100(mm)
MM 300 285 260 235 220
■IK4-P6BBB1□□S X軸:SA8R■IK4-P6BBB2□□S X軸:SA8C■IK4-P6BBB3□□S X軸:SA8C (単位は mm/s)
R軸の許容負荷慣性モーメントと角速度・角加減速度
ストローク速度タイプ
50~1050(50mm毎)
1100(mm)
MHL
210 205MHMMHHMHS
■IK3-P6BBE1□□S X軸:WSA16R■IK3-P6BBE2□□S X軸:WSA16C■IK3-P6BBE3□□S X軸:WSA16C (単位は mm/s)
R軸 許容負荷慣性モーメント 設定角速度 設定加減速度
0.010kg・m2 300度/s 0.10G (1,000度/s2)0.008kg・m2 400度/s 0.18G (1,778度/s2)0.006kg・m2 500度/s 0.28G (2,778度/s2)0.005kg・m2 600度/s
0.30G (2,940度/s2)0.004kg・m2 800度/s0.003kg・m2 以下 1,000度/s
HP リンク _資料 _R 軸の許容負荷慣性モーメントと角速度・角加減速度





























