Embed Size (px)
Citation preview

1
Ch8: Asservissements analogiques
1. structure d'un asservissement
1. exemple introductif
Un ascenseur est actionné par un moteur électrique. Comment faire pour être sûr qu'il
s'arrête exactement au niveau où on lui demande ? Il convient de réguler l'action de la commande
par un asservissement.
Un asservissement est un système dont la sortie est rebouclée sur l'entrée : on retourne
ainsi une information sur la façon dont le système a réagi à la commande, ce qui permet une
régulation de la sortie en temps réel.
2. schéma général
• E correspond à la commande (par exemple un échelon de tension)
• H(p) correspond au système utilisé (un moteur, un système de chauffage, etc…)
• K(p) est la contre-réaction (capteur de position, de vitesse, de T°, etc…)
remarque: si la commande est généralement une grandeur électrique, la sortie peut représenter
toute sorte de grandeur physique (vitesse, température,…)
3. modes de fonctionnement
Un asservissement peut fonctionner en poursuite et/ou en régulation :
• en poursuite : il permet le suivi de la grandeur d'entrée en sortie (ex : pour que l'ascenseur arrive
au bon niveau)
• en régulation : une perturbation sur le système ne doit pas affecter la sortie (ex: l'ascenseur doit
aller à la même vitesse même en cas de surtension)
ε(p)

2
2. Expression de la transmittance
1. étude d'un exemple
Calculer la fonction de transfert H(ω) du système suivant :
fonction de transfert isochrone : 𝐻 𝜔 =1
1+𝑗𝜔𝑅𝐶
En déduire sa transmittance en p
fonction de transfert isomorphe : 𝐻 𝑝 =1
1+𝑅𝐶𝑝
H(p) est appelée fonction de transfert isomorphe du système.
H(p)s'obtient à partir de la fonction de transfert en ω, H(jω), dans laquelle il suffit de
remplacer jω par la variable p.
2. transformée en p (ou transformée de Laplace)
H(p) est la transformée de Laplace (transformée en p) de la réponse impulsionnelle du système.
On peut également l'obtenir directement à partir de la fonction temporelle, à l'aide d’une table :
Exemples de transformées en p des fonctions usuelles
s(t) e(t)

3
Hors Programme : L'expression mathématique de la transformée de Laplace F(p)
de la fonction f(t) est donnée par: 𝑭 𝒑 = 𝒇(𝒕)𝒆−𝒑𝒕𝒅𝒕+∞
𝟎
3. fonction de transfert boucle ouverte
Pour obtenir la transmittance en boucle ouverte, on néglige les perturbations et on « débranche »
la chaine de rétroaction au niveau du comparateur.
on a alors TBO(p) = H(p) K(p)
4. fonction de transfert en boucle fermée
On néglige les perturbations.
Il faut introduire l’erreur ε : ε(p) = E(p) – K(p) S(p)
S(p) = H(p) ε(p) = H(p) E(p) – H(p) K(p) S(p)
S(p) (1+K(p)H(p)) = H(p) E(p)
𝑻𝑩𝑭 𝑝 =𝑆(𝑝)
𝐸(𝑝)=
𝐻(𝑝)
1+𝐾 𝑝 𝐻(𝑝)
Exemple:
On considère un système du premier ordre de fonction de transfert H p =A
1+ p (A=2; = 2ms).
Le système est au départ non bouclé.
Montrer que la transformée en p de la sortie se met sous la forme 𝑆 𝑝 = 𝐴( 1
𝑝−
1+ 𝑝)
A l'aide de la table des transformée en p, représenter graphiquement la sortie s(t)
Que représentent les paramètres A et ?
On réalise l'asservissement du système avec une boucle de rétroaction unitaire (K(p)=1).
Montrer que la fonction de transfert se met sous la forme 𝑇𝐵𝐹(𝑝) =𝐴′
1+′ 𝑝
(avec 𝐴′ =𝐴
𝐴+1 et ′ =
𝐴+1 )
Conclure sur les effets de l'asservissement sur le système.
3. Performance d'un asservissement
1. exemple d'une réponse indicielle
On appelle réponse indicielle la valeur de la sortie lorsque l'on soumet l'entrée à un échelon
de tension.
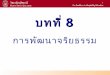
On considère la réponse indicielle à un système du 2ème ordre, de transmittance :
𝐻 𝑝 =𝐴0
1 + 2𝑚𝑝
𝜔0+
𝑝2
𝜔02
il existe 2 types de réponses selon la valeur de m :

4
Réponse d'un 2ème ordre, avec m<1 Réponse d'un 2ème ordre, avec m>1
1. précision
La précision d'un système est donnée par la différence entre la sortie et l'entrée en régime établi
(lorsque 𝑡 → ∞). On peut évaluer 2 grandeurs :
• l'erreur statique ε est l'erreur de position dans le cas de la réponse à un échelon
Elle correspond à la différence entre l'entrée et la sortie quand le système est stabilisé :
𝜀 = 𝑆∞ − 𝐸∞ Hors Programme : pour évaluer l'erreur de façon théorique, il suffit de calculer la valeur de la sortie s(t) quand 𝑡 → ∞
théorème de la valeur finale :
𝒍𝒊𝒎𝒕→∞ 𝒔 𝒕 = 𝒍𝒊𝒎𝒑→𝟎 𝒑 𝑺 𝒑
(en particulier pour une réponse indicielle: 𝑙𝑖𝑚𝑡→∞ 𝑠 𝑡 = 𝑙𝑖𝑚𝑝→0 𝑝1
𝑝𝑇𝐵𝐹 𝑝 = 𝑇𝐵𝐹(0) )
le gain d'un système est donné par 𝑙𝑖𝑚𝑝→0 𝑇𝐵𝐹 𝑝
L'erreur statique se calcule donc par : 𝜀 = 𝑆∞ − 𝐸∞ = 𝑇𝐵𝐹 0 𝐸∞ − 𝐸∞
• l'erreur de trainage : erreur de position dans le cas d'une rampe.
Le dépassement indiciel D (pour m>1) correspond au dépassement maximal par rapport au régime
établi en sortie.
2. rapidité
Pour évaluer la rapidité de réponse du système, on mesure le temps de réponse à 5% tr5% :
c'est le temps au bout duquel le signal reste compris entre (s∞+5%) et (s∞ -5%)
4. Stabilité
On considère le système de transmittance en boucle fermée 𝑻𝑩𝑭 𝑝 =𝐻(𝑝)
1+𝐾 𝑝 𝐻(𝑝)=
𝐻(𝑝)
1+𝑇𝐵𝑂 (𝑝)
1. définition
• Un système est stable si, après une perturbation, la grandeur de sortie revient à sa valeur initiale.

5
• Un système peut être stable en boucle ouverte, et devenir instable en boucle fermée.
2. critères de stabilité
En boucle fermée:
Un système est stable si sa transmittance TBF(p) n’a que des pôles à partie réelle négative.
Il faudrait donc résoudre l'équation 1 + 𝑇𝐵𝑂 𝑝 = 0, soit 𝑇𝐵𝑂 𝑝 = −1
Dans la pratique, cette équation se résout graphiquement grâce à la représentation graphique
de TBO(jω) dans le diagramme de Bode.
Critère sur la boucle ouverte:
On s'intéresse à la fonction de transfert boucle ouverte, que l'on étudie en régime
harmonique : TBO(jω) = H(jω)K(jω)
on considère l'évolution du système autour du point critique TBO(ω0) = H(ω0)K(ω0) = -1
( 20 log|TBO(ω0)| = 0 ; arg(TBO(ω0)) = 180° )
Pour que le système soit stable, il faut que la courbe de gain passe en dessous du point critique
dans le diagramme de Bode, ce qui correspond aux 2 critères suivants :
critère : le système est stable si, à la pulsation ωT telle que G(ωT) = 0 dB, φ(ωT) > -180°
critère : le système est stable si, à la pulsation ω0 telle que φ(ω0)=-180°, G(ω0) < 0
3. marge de gain, marge de phase
• Marge de gain (MG) : on se place à la pulsation ωφ pour laquelle la phase vaut -180, et on mesure
combien de décibels nous séparent de 0.

6
• Marge de phase (Mφ) : on se place à la pulsation ωG pour laquelle le gain est nul, et on mesure
combien de degrés nous séparent de -180°
En pratique, la stabilité est considérée comme suffisante si Mφ > 45° et MG < -10dB
5. Les correcteurs
1. définition
Un correcteur est un circuit que l'on insère dans la chaine directe pour améliorer les
performances du système.
Considérons le système de fonction de transfert 𝐻 𝑝 =𝐴
1+ 𝑝.
On lui adjoint un correcteur proportionnel intégral (P.I.) de fonction de transfert 𝐶 𝑝 = 𝐶0 +𝐶1
𝑝
2. action de la partie proportionnelle
Le correcteur proportionnel multiplie H(p) par C0, ce qui se traduit au niveau du gain par un
décalage de +20log(C0). Si C0<1, on diminue la marge de gain (sans changer la phase), ce qui
stabilise le système.
Le gain du système est donné par 𝑙𝑖𝑚𝑝→0 𝑇𝐵𝐹 𝑝 =𝐶0𝐴
1+𝐶0𝐴 on perd en précision.
exemple : - calculer la gain statique Boucle Fermée sans correcteur pour A = 10
- même question avec correcteur, pour C0 = 0,1
3. action de la partie intégrale
Calcul de la fonction de transfert en boucle fermée avec l'ensemble du correcteur P.I.:
𝑇𝐵𝐹 =𝐶 𝑝 𝐻 𝑝
1+𝐶 𝑝 𝐻 𝑝 =
(𝐶0+𝐶1𝑝
)(𝐴
1+ 𝑝)
1+(𝐶0+𝐶1𝑝
)(𝐴
1+ 𝑝)
Le gain du système est donné par 𝑙𝑖𝑚𝑝→0 𝑇𝐵𝐹 𝑝 = 1
le correcteur intégral permet d'annuler l'erreur statique.
Dans un correcteur P.I., il convient d'ajuster au mieux les paramètres C0 et C1 pour gagner en
stabilité et en précision, sans trop perdre sur le temps de réponse.