Embed Size (px)
Citation preview

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
39
CHAPITRE 2
SIMULATION NUMÉRIQUE PERMETTANT DE QUALIFIER L’ENTRETOISEMENT

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
40
SOMMAIRE DU CHAPITRE 2
1. INTRODUCTION ...........................................................................................................42 2. CHOIX D’UNE STRUCTURE REPRESENTATIVE....................................................42 2.1. Situation de l’ouvrage ..................................................................................................43 2.2. Coupe transversale du quadripoutre de Bonpas...........................................................44 3. LA DISCRÉTISATION DE LA GEOMETRIE..............................................................44 3.1. Choix de la nature des elements...................................................................................44 3.1.1. Eléments poutres...............................................................................................45 3.1.2. Eléments plaques ..............................................................................................45 3.1.3. Eléments volumiques........................................................................................46 3.2. Taille des éléments.......................................................................................................46 3.3. Maillage des connexions..............................................................................................47 3.4. Maillage de la structure................................................................................................49 3.4.1. Les poutres........................................................................................................49 3.4.2. Le tablier...........................................................................................................50 3.4.3. Les armatures....................................................................................................52 3.4.4. Les diaphragmes ...............................................................................................53 3.4.5. Vue globale du maillage de la dalle et des poutres ..........................................54 3.5. Les conditions d’appuis ...............................................................................................55 3.5.1. Les appareils d’appuis ......................................................................................55 3.5.2. Conditions d’appuis modélisées .......................................................................56 4. MODÉLISATION DES CHARGEMENTS....................................................................57 4.1. Le poids propre ............................................................................................................58 4.2. Le schéma de charge de l’UIC 71................................................................................58

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
41
4.3. Le chargement des essieux du TGV ............................................................................61 4.3.1. Bref historique du TGV....................................................................................61 4.3.2. Le TGV atlantique ............................................................................................61 5. MODÉLISATION DU COMPORTEMENT MÉCANIQUE DU BÉTON ....................64 5.1. Aspect phénoménologique du béton............................................................................64 5.2. Cadre théorique de la modélisation du béton...............................................................64 5.2.1. La fissure discrète.............................................................................................65 5.2.2. La fissure diffuse ..............................................................................................65 5.3. Un modèle elastoplastique pour le béton .....................................................................65 5.3.1. Hypothèse de partition......................................................................................66 5.3.2. Relation contrainte-déformation.......................................................................66 5.3.3. Loi d’écrouissage..............................................................................................66 5.3.4. Fonction de charge............................................................................................67 5.3.5. Plasticité non associée – loi d’écoulement .......................................................69 5.3.6. Visualisation des fissures..................................................................................70 5.3.7. Conclusion sur le modèle élastoplastique.........................................................70 5.4. Problème de localisation des déformations..................................................................70 5.4.1. Comportement adoucissant...............................................................................70 5.4.2. Energie de fissuration .......................................................................................71 5.4.3. Loi uniaxiale de comportement du béton: ........................................................73 5.4.3.1. Cas de la traction..........................................................................................74 5.4.3.2. Cas de la compression..................................................................................74 5.4.4. Généralisation à l’état de contraintes multiaxiales...........................................75 5.4.5. Paramètres du modèle.......................................................................................76 6. MODELISATION DU COMPORTEMENT MECANIQUE DE L'ACIER...................77 7. CONCLUSION : DÉFINITION D’UN PROGRAMME D’ANALYSE UTILSANT NOTRE MODÈLE NUMERIQUE..........................................................................................78

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
42
1. INTRODUCTION Nous avons déjà présenté dans le chapitre précédent les différentes simulations numériques employées pour déterminer l’impact de l’entretoisement dans les multipoutres. Cependant aucune d’elles ne fut réalisée en incorporant totalement la multiplicité des phénomènes physiques. En particulier, l’approche de la géométrie des entretoises fut traitée de façon assez sommaire par l’utilisation d’éléments poutres. Dans un premier temps, nous montrerons pourquoi et comment nous avons choisi la bretelle d’accès de Bonpas comme support de notre étude ; puis nous aborderons la modélisation de ce pont dans l’espace. Nous mettrons ainsi en lumière la difficulté de concilier un maillage performant (avec le moins d’éléments possible) avec la représentation de qualité d’un diaphragme. Nous détaillerons également la définition, toujours délicate, des conditions d’appuis puis du chargement. Enfin nous montrerons comment nous avons abordé la représentation de la fissuration du béton par le biais d’un modèle élastoplastique implanté dans le logiciel Abaqus version 631 que nous avons utilisé. Nous déterminerons les paramètres nécessaires à ce modèle et la meilleure façon de les identifier. L’objectif de ce chapitre est de définir une technique numérique performante pour apprécier le rôle de l’entretoisement d’un pont à poutres. Mais au delà de ce seul objectif, ce chapitre a aussi l’ambition de proposer une référence sur la modélisation générale des ponts dans l’espace puisque le modèle que nous développons peut avoir de multiples utilités. 2. CHOIX D’UNE STRUCTURE REPRESENTATIVE
Afin d’étudier l’apport de l’entretoisement dans un quadripoutre ferroviaire à grande vitesse, nous avons décidé de choisir un pont réel parmi le parc existant. Dans un premier temps, nous avons répertorié les différents quadripoutres réalisés sur la dernière ligne à grande vitesse du TGV méditerranée. Notre attention s’est portée sur trois ouvrages distincts :
- le quadripoutre sur l’A7 à la Garde Adhémar, - le quadripoutre du canal EDF à Mallemort, - le quadripoutre de la bretelle d’accès du Bow-string de Bonpas (sous le péage de
l’A7). L’utilisation d’un quadripoutre existant nous permet de fonder notre recherche sur une géométrie réelle. Cependant, le choix d’une structure réelle pose le problème de sa représentativité puisque chaque pont à toujours une spécificité propre (nombre de travées, présence d’un biais, position de l’entretoisement, etc). Notre volonté est d’étudier un pont quadripoutre dont le comportement soit facilement généralisable. Les deux premiers ouvrages cités ci-dessus sont très particuliers, ils ont plusieurs travées et un fort biais. Nous les avons éliminés rapidement afin de conserver le quadripoutre de la bretelle d’accès du Bow-string de Bonpas, car ce dernier est le moins spécifique : il est droit et composé d’une seule travée. Son choix assure une bonne représentativité du comportement général de ce type de pont.

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
43
2.1. SITUATION DE L’OUVRAGE Ce pont appartient à la nouvelle ligne de train à grande vitesse entre Lyon et Marseille (LGV méditerranée). Il se situe sur la commune de Bonpas à 10 km au Sud-Est d’Avignon. L’ouvrage principal est un Bow-string qui permet de franchir la gare de péages de l’autoroute A7 au niveau de l’échangeur d’Avignon. L’accès au bow-string s’effectue par deux quadripoutres mixtes situés à chacune de ses extrémités (fig. 2.1 et 2.2).
Figure 2.1 : Situation du quadripoutre Figure 2.2 : Implantation sur le site L’ouvrage est composé d’une seule travée de 30 m. Il comporte quatre poutres en Profilés Reconstitués Soudés (PRS) de 1,7 m de hauteur et il est sans biais de franchissement. Il comprend des diaphragmes sur appuis mais il n’a aucun entretoisement intermédiaire. La dalle en béton armé a une épaisseur de 0,43 m et elle est connectée aux semelles supérieures des poutres et des diaphragmes.
Figure 2.3 : quadripoutre de Bonpas
Quadripoutres d’accès au Bow-string

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
44
2.2. COUPE TRANSVERSALE DU QUADRIPOUTRE DE BONPAS La bretelle d’accès au Bow-string de Bonpas a une section typique d’un quadripoutre SNCF. L’espacement des poutres est de 3,2 m et la position des voies de circulation est désaxée par rapport au centre du pont de 2,4 m (fig. 2.4). Les poutres ont une hauteur de 1,7 m. La largeur des semelles est de 0,8 m et leur épaisseur de 4 cm, les âmes ont une épaisseur de 2 cm.
Figure 2.4 : Coupe transversale de l’ouvrage Cet ouvrage n’a pas d’entretoisement intermédiaire mais il comporte trois raidisseurs d’âmes par poutre d’une largeur de 20 cm et d’une épaisseur de 1,5 cm. L’espacement de ces raidisseurs est uniforme et correspond au quart de la portée, si bien qu’un raidisseur est situé au centre de la travée de chaque poutre. Les calculs effectués pour dimensionner l’ouvrage ont été réalisés par une modélisation en grillage de poutre par simulation numérique. Ces calculs ont montré que sans entretoisement les critères de dimensionnement (contraintes, flèches, accélérations dans le tablier, fatigue des assemblages) étaient respectés. Notre objectif n’est pas de dimensionner cet ouvrage mais d’utiliser ses caractéristiques afin d’étudier l’impact de l’entretoisement intermédiaire. Afin de comparer le comportement de ce pont avec ou sans diaphragme, nous avons donc dû choisir les dimensions du diaphragme intermédiaire. Conformément aux dimensions standards des diaphragmes dans ce type de pont, nous avons utilisé la même section pour le diaphragme que celle des poutres principales qui est, de plus, très proche de la section des diaphragmes sur appuis. 3. LA DISCRÉTISATION DE LA GEOMETRIE
3.1. CHOIX DE LA NATURE DES ELEMENTS
Les ouvrages d’art comportent différents types de pièces structurelles : dalle, poutre, diaphragme, armature. Ces pièces ont des dimensions et des caractéristiques bien différentes et correspondent à des familles d’éléments numériques distincts. La modélisation est donc construite avec des éléments de nature différente. Nous avons retenu trois familles d’éléments pour modéliser un pont à poutres : des éléments poutres, des éléments plaques et des éléments
3,2 3,2
2,4 Axe de la voie
3,2
12,8
0,43
1,7
0,8
0,02
0,04
Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
45
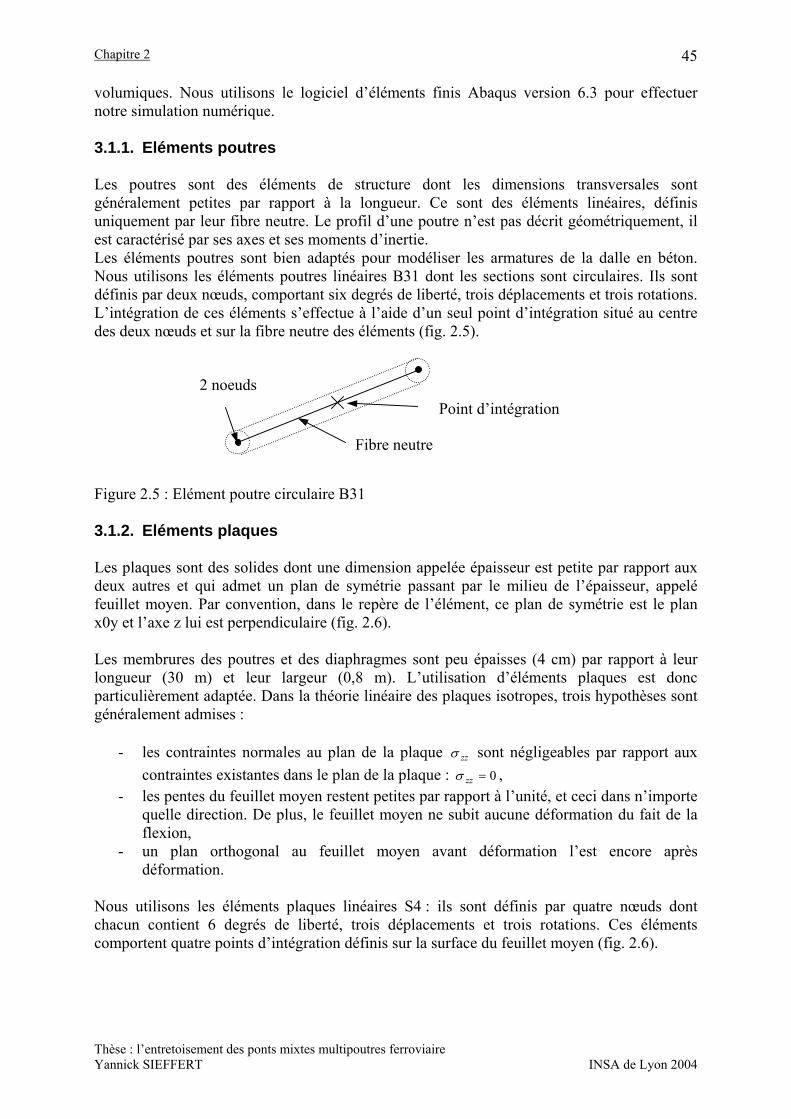
volumiques. Nous utilisons le logiciel d’éléments finis Abaqus version 6.3 pour effectuer notre simulation numérique. 3.1.1. Eléments poutres Les poutres sont des éléments de structure dont les dimensions transversales sont généralement petites par rapport à la longueur. Ce sont des éléments linéaires, définis uniquement par leur fibre neutre. Le profil d’une poutre n’est pas décrit géométriquement, il est caractérisé par ses axes et ses moments d’inertie. Les éléments poutres sont bien adaptés pour modéliser les armatures de la dalle en béton. Nous utilisons les éléments poutres linéaires B31 dont les sections sont circulaires. Ils sont définis par deux nœuds, comportant six degrés de liberté, trois déplacements et trois rotations. L’intégration de ces éléments s’effectue à l’aide d’un seul point d’intégration situé au centre des deux nœuds et sur la fibre neutre des éléments (fig. 2.5).
Figure 2.5 : Elément poutre circulaire B31 3.1.2. Eléments plaques Les plaques sont des solides dont une dimension appelée épaisseur est petite par rapport aux deux autres et qui admet un plan de symétrie passant par le milieu de l’épaisseur, appelé feuillet moyen. Par convention, dans le repère de l’élément, ce plan de symétrie est le plan x0y et l’axe z lui est perpendiculaire (fig. 2.6). Les membrures des poutres et des diaphragmes sont peu épaisses (4 cm) par rapport à leur longueur (30 m) et leur largeur (0,8 m). L’utilisation d’éléments plaques est donc particulièrement adaptée. Dans la théorie linéaire des plaques isotropes, trois hypothèses sont généralement admises :
- les contraintes normales au plan de la plaque zzσ sont négligeables par rapport aux contraintes existantes dans le plan de la plaque : 0=zzσ ,
- les pentes du feuillet moyen restent petites par rapport à l’unité, et ceci dans n’importe quelle direction. De plus, le feuillet moyen ne subit aucune déformation du fait de la flexion,
- un plan orthogonal au feuillet moyen avant déformation l’est encore après déformation.
Nous utilisons les éléments plaques linéaires S4 : ils sont définis par quatre nœuds dont chacun contient 6 degrés de liberté, trois déplacements et trois rotations. Ces éléments comportent quatre points d’intégration définis sur la surface du feuillet moyen (fig. 2.6).
Point d’intégration 2 noeuds
Fibre neutre

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
46
Figure 2.6 : Points d’intégration d’un élément plaque S4 3.1.3. Eléments volumiques Les éléments de volume sont des éléments tridimensionnels dont toutes les dimensions sont du même ordre de grandeur. Ils sont employés pour la modélisation de pièces massives dans une structure. La géométrie de ces éléments est explicitement décrite dans l’espace. La dalle est épaisse (40 cm) donc nous la considérons comme une pièce massive. Nous utilisons alors les éléments linéaires de forme hexaèdre C3D8. Ils sont définis par huit nœuds, comportant trois degrés de liberté, les trois déplacements. L’intégration de ces éléments s’effectue à l’aide de huit points d’intégration. Ces points ne sont pas situés sur les faces de l’hexaèdre mais dans leur volume (fig. 2.7).
Figure 2.7 : Elément volumique C3D8
3.2. TAILLE DES ÉLÉMENTS La complexité de la géométrie physique d’un ouvrage ne peut jamais être parfaitement décrite par un maillage. De plus, l’unicité du maillage n’existe pas pour décrire une forme donnée. Cependant en prenant certaines précautions, le maillage peut se rapprocher judicieusement de la géométrie physique. La génération d’un maillage est souvent considérée, à tort, comme une étape bénigne de la simulation ; elle est pourtant la fondation des résultats numériques. Le
Feuillet moyen
y
x
z
0 3/a
3/b
a
b
8 noeuds
c
b 3/a
3/b
3/c
8 points d’intégration
a

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
47
maillage d’un multipoutre comporte huit pièces différentes, connectées entre elles : la dalle, les armatures, les trois membrures de la poutre et les trois membrures du diaphragme. La difficulté principale de la génération d’un maillage tridimensionnel réside dans la connexion des pièces qui sont multiples et dans des directions différentes. De plus, la densité de notre maillage doit être optimal afin de réduire autant que possible la taille du problème. Dans cette optique, nous traitons en premier lieu les surfaces de connexions des différentes pièces. Puis nous extrapolons la taille de ces éléments au reste de l’ouvrage afin d’obtenir des éléments de taille identique dans l’ensemble du pont. Cette démarche peut sembler étonnante car habituellement, seule les zones susceptibles de développer des phénomènes significatifs sont maillées finement, le reste de la structure est alors maillé plus grossièrement (fig. 2.8a). Mais la spécificité de notre simulation concerne l’étude d’un pont, de surcroît un pont ferroviaire. Les véhicules ne sont pas statiques, ils se déplacent sur l’ouvrage, donc nous ne pouvons connaître, a priori, les zones nécessitant un maillage plus fin. De plus, l’utilisation d’éléments de même taille, nous affranchit de l’influence de leur taille sur les résultats numériques (fig. 2.8b).
Figure 2.8 : Différents types de maillage
3.3. MAILLAGE DES CONNEXIONS En premier lieu, nous devons franchir l’obstacle de la connexion des pièces perpendiculaires ou coplanaires. La démarche la plus logique est de conserver le même nombre d’éléments dans les pièces coplanaires et le même nombre d’éléments dans les pièces perpendiculaires. Ainsi, l’influence du maillage est homogène sur ces différentes. Tout d’abord, posons le problème de la connexion entre les membrures supérieures des poutres et des diaphragmes. Ces éléments sont dans le même plan et chacun conduit à une raideur dans deux directions privilégiées, celle de la longueur de l’ouvrage pour les poutres et celle transversale à l’ouvrage pour les diaphragmes. Le nombre d’éléments doit nous permettre d’étudier la flexion des membrures dans les deux directions ; un nombre trop restreint d’éléments aboutit à une raideur numérique importante. Cependant le nombre d’équations est proportionnelle au nombre d’éléments. Des études préliminaires ont été effectuées pour optimiser les temps de calculs ainsi que leur précision. L’utilisation de quatre éléments dans la largeur fut alors retenue.
Zone de maillage fin
Zone de maillage plus grossier
Zone de maillage fin
a b

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
48
Figure 2.9 : Connexion des membrures poutre/diaphragme Le choix de la discrétisation des largeurs des pièces grâce à quatre éléments linéaires a une influence sur l’ensemble du maillage. En effet, cela conditionne aussi la longueur des éléments. La largeur doit être proche de la longueur afin de ne pas obtenir des éléments distendus et mal appropriés. Or la taille des pièces dans les deux axes privilégiés est totalement différente. Les poutres ont une longueur de 30 m et une largeur de semelle de 0,8 m. En prenant une largeur de membrure du diaphragme de 0,8 m, discrétisée par quatre éléments de 0,2 m, nous obtenons alors 600 éléments pour la membrure de la poutre. Comme nous modélisons un quadripoutre, le nombre d’éléments nécessaires pour les huit semelles est de 4800 éléments. Afin de réduire ce nombre, nous considérons que le diaphragme a une largeur de un mètre (au lieu de 0,8 m), ce qui permet de réduire le nombre d’éléments des semelles des poutres à 3840, soit un gain de 20%. Cette approximation va dans le bon sens car le diaphragme en est d’autant plus raide (fig. 2.10) et la comparaison d’un pont avec et sans diaphragme est alors plus significative.
Figure 2.10 : Connexion retenue
4 éléments dans la largeur de la membrure
de l’entretoise
4 éléments dans la largeur de la membrure de la poutre
1
0,8
4 éléments dans la largeur de la membrure
de l’entretoise
4 éléments dans la largeur de la membrure de la poutre
0,8
0,8

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
49
De plus, la taille des éléments, dans la direction longitudinale du pont, est conditionnée par un autre paramètre : la symétrie transversale. En effet, le maillage doit permettre le positionnement du diaphragme au centre du pont. Pour ce faire, un nombre pair d’élément est nécessaire par file. Si la largeur des semelles du diaphragme est de 0,8 m, 150 éléments sont nécessaires par file dans les semelles des poutres et le diaphragme ne peut plus être positionné au centre de l’ouvrage. Par contre, avec l’hypothèse d’une largeur de membrure du diaphragme de 1 m, le nombre d’éléments par file dans les semelles des poutres passe à 120 et le diaphragme peut être positionné au centre de l’ouvrage. A la lumière de ces explications, nous constatons que le maillage est une étape complexe, qui doit donc être généré avec beaucoup d’attention et de soin car un grand nombre de paramètres sont couplés.
3.4. MAILLAGE DE LA STRUCTURE
3.4.1. Les poutres Les poutres métalliques sont composées d’éléments plaques linéaires en trois dimensions à quatre nœuds (S4). Chaque plaque est définie par son feuillet moyen. Elles sont reliées entre elles par des liaisons rigides entre leur nœud commun, ce qui représente convenablement les assemblages par soudure des plaques métalliques réelles. Mais un problème subsiste dans la définition des positions des plaques, entre les membrures supérieures des poutres et les éléments de volume de la dalle. Sans précaution particulière, la plaque s’inscrit dans l’élément de volume car les nœuds sont communs (fig. 2.11a). La géométrie n’est alors plus respectée, ce qui peut sembler être un détail. Cependant la simulation numérique n’en sera que plus ardue et hasardeuse. En effet, cette superposition d’éléments de nature différente peut provoquer des pivots nuls [CRA.01] et fausser ainsi les résultats de calcul. Les degrés de liberté existants aux nœuds sont différents entre les plaques (6 D.D.L) et les éléments volumiques (3 D.D.L). Les trois degrés de liberté des plaques définissants les rotations ne peuvent alors pas être alimentés correctement par les éléments de volume, ce qui se traduit pas l’apparition d’un mouvement de corps rigide dans les plaques et donc à des pivot nuls dans le calcul. Une solution attractive, employée par Zhou et al. [ZHO.04], est de respecter la géométrie réelle en positionnant les nœuds des plaques et des volumes de façon exacte puis de les relier par des éléments rigides (fig. 2.11b). Certes la géométrie est mieux définie, mais les problèmes de pivots nuls subsistent car ces éléments rigides sont composés de six degrés de liberté dont trois ne peuvent être transmis aux volumes. De plus, les éléments rigides alourdissent le modèle. Le passage entre des éléments 2D à des éléments 3D nécessiterait de développer des éléments de liaisons spécifiques portants des termes de couplage dans leur matrice de rigidité entre les différents degrés de liberté [BAU.03]. Malheureusement, nous n’avons pas à notre disposition de tels éléments. La meilleure solution est d’utiliser, d’une part, les options d’excentrement de la fibre moyenne des plaques et d’autre part, les options de couplage des surfaces des plaques et des surfaces des volumes disponibles dans la version 6.31 d’Abaqus. Ainsi les nœuds entre les plaques et les volumes sont communs, l’utilisation d’éléments de liaison n’est pas nécessaire et la géométrie est correctement définie (fig. 2.11c). De plus, les risques de pivots nuls sont supprimés car à partir des surfaces communes entre les éléments volumiques et les éléments plaques, le logiciel Abaqus extrapole les rotations de ces surfaces communes afin de les transmettre sur les degrés de liberté des trois rotations des plaques.
Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
50
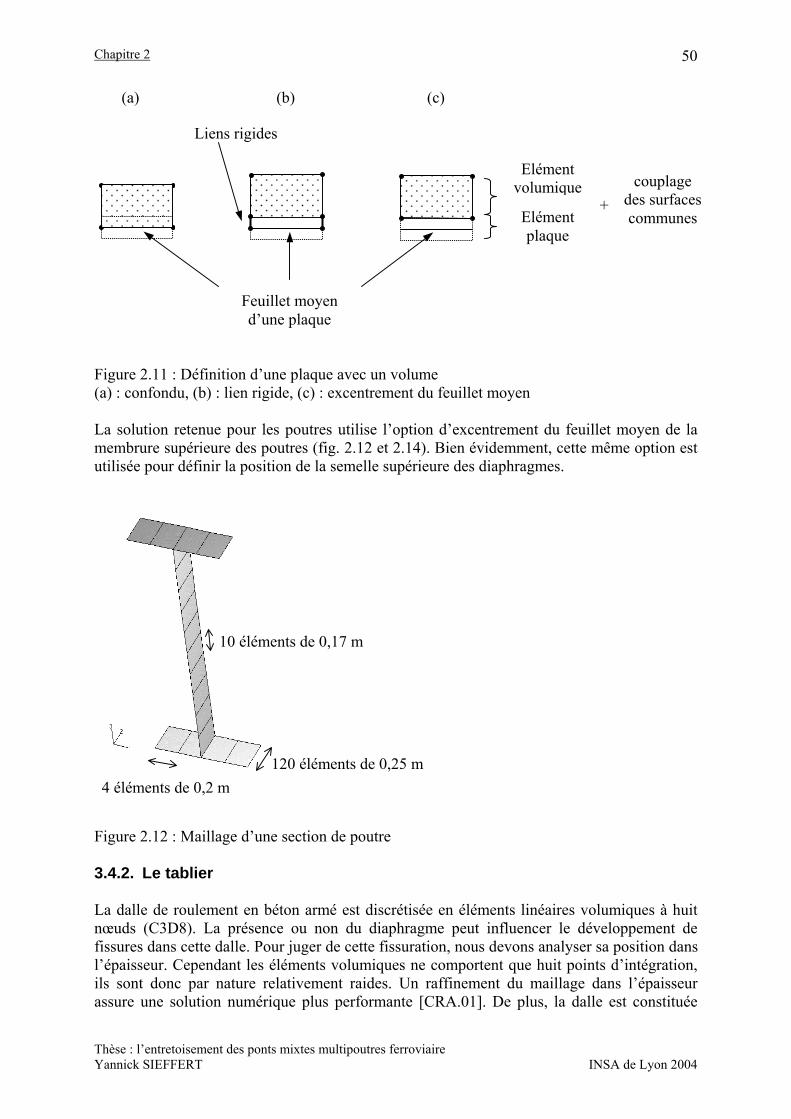
Figure 2.11 : Définition d’une plaque avec un volume (a) : confondu, (b) : lien rigide, (c) : excentrement du feuillet moyen La solution retenue pour les poutres utilise l’option d’excentrement du feuillet moyen de la membrure supérieure des poutres (fig. 2.12 et 2.14). Bien évidemment, cette même option est utilisée pour définir la position de la semelle supérieure des diaphragmes.
Figure 2.12 : Maillage d’une section de poutre 3.4.2. Le tablier La dalle de roulement en béton armé est discrétisée en éléments linéaires volumiques à huit nœuds (C3D8). La présence ou non du diaphragme peut influencer le développement de fissures dans cette dalle. Pour juger de cette fissuration, nous devons analyser sa position dans l’épaisseur. Cependant les éléments volumiques ne comportent que huit points d’intégration, ils sont donc par nature relativement raides. Un raffinement du maillage dans l’épaisseur assure une solution numérique plus performante [CRA.01]. De plus, la dalle est constituée
Feuillet moyen d’une plaque
Liens rigides
Elément volumique
Elément plaque
(a) (b) (c)
+
4 éléments de 0,2 m 120 éléments de 0,25 m
10 éléments de 0,17 m
couplage des surfaces communes

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
51
d’armatures que nous devons positionner dans son épaisseur. Ces armatures sont réparties en deux nappes distinctes, l’une proche de la fibre supérieure et l’autre proche de la fibre inférieure de la dalle. Le raffinement du maillage dans l’épaisseur augmente les possibilités de positionnement des armatures. Cependant, les éléments volumiques sont des éléments très gourmands en temps de calcul, et la dalle est la partie du pont nécessitant le plus d’éléments. La division du tablier en quatre éléments dans l’épaisseur est un bon compromis. La hauteur de chaque élément est de 0,1 m. Les différents côtés du volume sont dans des rapports acceptables (fig. 2.13).
Figure 2.13 : Maillage d’une section de dalle La connexion des éléments de la dalle avec les semelles supérieures des poutres est définie de façon rigide, leurs nœuds communs sont confondus.
Figure 2.14 : Connexion de la dalle avec les poutres
4 éléments de 0,1 m
120 éléments de 0,25 m
64 éléments de 0,2 m
0,80
0,02
Nœuds communs 0,40
1,70
Axe de la fibre moyenne des
plaques
0,02
0,02

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
52
3.4.3. Les armatures Le ferraillage de la dalle exécuté lors de la construction d’un pont est très compliqué. Dans le cadre d’une simulation numérique, les plans de ferraillages doivent être épurés. Cette simplification est menée afin de conserver la raideur générale apportée par les armatures à la dalle de béton. La répartition de cette raideur conserve les trois axes privilégiés de la dalle, c’est-à-dire la direction longitudinale, transversale et verticale : deux nappes d’armatures sont donc nécessaires pour respecter ces trois axes. La position du ferraillage est tributaire du maillage de la dalle puisque les éléments poutres doivent être connectés aux nœuds existant dans la dalle. C’est aussi pourquoi un maillage dense de la dalle permet de mieux prendre en compte l’impact du ferraillage, qui peut alors être mieux réparti. Le rôle des armatures est de reprendre les contraintes de traction de la dalle lors du développement de fissures dans cette dernière. Les armatures doivent être en nombre suffisantes pour éviter toute localisation de fissures dues à un défaut de raideur locale. Dans notre modèle, les armatures sont discrétisées par des éléments poutres (B31) à deux noeuds. Les recommandations du SETRA [SER.95] préconisent un taux de ferraillage minimum de 1% de la section pour maîtriser la fissuration de la dalle. Nous avons donc défini la surface d’armature en respectant ce critère puis nous avons discrétisé cette surface d’armature sur le maillage dans la direction longitudinale et transversale. Nous avons, de plus, suivi les directives du livret 2.01 de la SNCF [SNC.95], en positionnant 2/3 des sections des armatures dans la nappe inférieure et 1/3 dans la nappe supérieure. En définitive, nous avons utilisé par nappe, 17 barres dans la direction longitudinale espacées de 0,80 m et 31 barres dans la direction transversale espacées de 1 m (fig. 2.15).
Figure 2.15 : Section d’armature
Armature longitudinale supérieure r = 0,018
Armature transversale supérieure r = 0,02 m
1,0 0,25
0,1
0,1
32
0,8
0,2
0,1
0,1
31
Armature longitudinale inférieure
r = 0,025 m
Armature transversale inférieure
r = 0,029 m

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
53
La position des armatures dans le maillage de la dalle est la suivante :
Figure 2.16 : Maillage des armatures de la dalle 3.4.4. Les diaphragmes La modélisation des diaphragmes est imposée par celle des poutres principales. La connexion est considérée comme parfaite entre les poutres et les diaphragmes puisque dans la réalité elles sont soudées. Comme nous l’avons montré au début de ce chapitre, nous utilisons quatre éléments de plaques dans la largeur des semelles du diaphragme pour conserver la même raideur que celle des poutres. Les montants sont modélisés par prolongement des âmes des diaphragmes jusqu’aux âmes des poutres. Les trous d’homme ne sont pas considérés dans le modèle car leur présence n’a pas d’influence dans le comportement global des diaphragmes. Certes les trous d’homme créent une perte de rigidité dans le diaphragme mais cette dernière est compensée par la mise en place de raidisseurs sur son âme. Nous pouvons donc considérer les diaphragmes sans les trous d’homme. Les diaphragmes sur appuis sont toujours présents dans le modèle. Dans la plupart des représentations graphiques, nous ne les faisons pas apparaître afin de mieux visualiser les poutres et la dalle. Le comportement du pont est comparé avec la présence ou non du diaphragme intermédiaire.
17 barres d’espacement 0,8 m
(armatures transversales)
12,8 m
31 barres d’espacement 1,0 m
(armatures longitudinales)
30 m
Couche d’armatures supérieure
Couche d’armatures inférieure

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
54
Figure 2.17 : Maillage d’un diaphragme Les diaphragmes sont complètement connectés aux poutres principales. Les feuillets moyens des semelles supérieures des diaphragmes sont excentrés de leur demi-épaisseur, comme pour les poutres principales. Ainsi tous les nœuds des semelles sont connectés de façon rigide à la dalle. Le soin apporté au maillage des diaphragmes est identique à celui apporté aux poutres. 3.4.5. Vue globale du maillage de la dalle et des poutres
Figure 2.18 : Vue globale du maillage
4 éléments de 0,1 m
64 éléments de 0, 2 m
1,6 m 3,2 m
30 m
120 éléments de 0,25 m

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
55
3.5. LES CONDITIONS D’APPUIS Les conditions limites imposées dans un modèle numérique sont toujours d’une grande importance. Dans le cas de notre ouvrage d’art, nous allons analyser les réelles conditions d’appuis afin de les transposer par un blocage de degrés de liberté adéquat. 3.5.1. Les appareils d’appuis Les appareils d’appuis sur le quadripoutre de Bonpas sont de trois natures différentes :
- appui simple, - butée anti-sismique fixe, - butée anti-sismique mobile.
Les poutres principales sont posées sur un appui simple, ce dernier est composé d’un socle en béton noyé dans la pile de pont sur lequel est scellé un appareil d’appui confectionné à l’aide d’un matériau de type teflon (plaques d’ertalyte). Ce matériau résiste à des contraintes normales et a de plus un très faible coefficient de frottement. Ainsi ce type d’appareil d’appui correspond à un appui simple dont seule la direction verticale est bloquée. Il permet de reprendre les états limites de service de l’ouvrage. Ces appareils d’appuis sont démontables pour faciliter leur remplacement.
Figure 2.19 : Détail d’un appareil d’appui simple La prise en compte du risque sismique est maintenant obligatoire sur les projets d’ouvrages d’art en France [RAM.99] ; la conception de butées sismiques intègre ces phénomènes. La plastification, aux états limites ultimes, est autorisée pour ces butées ; elles sont conçues pour être aussi déformables que possible. Le pont de Bonpas comporte quatre butées antisismiques, deux fixes sur la même culée et deux mobiles sur l’autre culée. Ces butées sont positionnées au niveau des semelles inférieures des diaphragmes d’appuis. Les butées antisismiques mobiles sont constituées d’une butée métallique noyée dans le béton des piles et d’une contre-butée solidaire du tablier par l’intermédiaire des diaphragmes sur appuis. Un matériau à faible coefficient de frottement, comme l’ertalyte, est interposé entre les butées et les contre-butées. Ainsi la dilatation du tablier dans la direction longitudinale est libre mais les déplacements et les rotations suivant la direction transversale sont bloqués pour reprendre les efforts des séismes transversaux.
Plaque d’Ertalyte
Socle en béton
Poutre principale
Diaphragme sur appui

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
56
Figure 2.20 : Détail d’une butée antisismique mobile Les butées fixes sont constituées d’une butée métallique noyée dans le béton, en forme d’hexaèdre, et d’une contre-butée métallique solidarisée aux diaphragmes qui pénètre dans la butée. Le même matériau d’interposition est positionné entre les deux éléments pour récupérer les efforts de frottement. Ces butées fixes bloquent les déplacements et les rotations suivant les directions longitudinale et transversale de l’ouvrage. Elles reprennent les efforts de séisme dans ces deux directions.
Figure 2.21 Détail d’une butée antisismique fixe 3.5.2. Conditions d’appuis modélisées Les appuis simples et les butées antisismiques de l’ouvrage se résument par :
- sur la première culée, seuls le déplacement et la rotation longitudinale sont libres, - sur la seconde culée, aucun déplacement et aucune rotation n’est possible.
Nous avons modélisés ces conditions d’appuis sur notre maillage en affectant des conditions limites sur les files de nœuds des semelles inférieures des deux extrémités de poutres (fig. 2.22). Ces conditions d’appuis se rapprochent de celles réelles du pont. Il est cependant important de noter qu’aucune modélisation consistant à bloquer des degrés de libertés de
Butée métallique
Culée
Contre-butée métallique
Matériau d’interposition
Diaphragme sur appui
Butée anti-sismique mobile Butée métallique
Vue de face
Vue de dessus
Matériau d’interposition Poutre principale
Contre-butée métallique

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
57
déplacement et de rotation aux nœuds n’est en mesure de reproduire fidèlement la réalité. Il serait plus judicieux de modéliser les conditions d’appuis du pont en utilisant des éléments de contact avec un frottement. Ceci permettrait d’être plus représentatif du contact poutre-teflon-pile. Malheureusement, l’utilisation de surfaces de contacts dans une modélisation aux éléments finis est beaucoup trop gourmande en temps de calcul pour que nous puissions l’utiliser dans notre modèle qui est déjà conséquent.
Figure 2.22 : Conditions d’appuis modélisées 4. MODÉLISATION DES CHARGEMENTS
Les ouvrages d’art ferroviaire ont la particularité d’être très raides afin de réduire les vibrations lors du passage d’un train à grande vitesse. Cette raideur est apportée par un poids propre très important dû à une dalle de forte épaisseur de 40 cm et à la mise en place d’un ballast de 60 cm d’épaisseur. Le premier chargement naturel du pont est donc son poids propre. Les autres charges proviennent des véhicules. Le schéma de charge international nommé UIC 71 regroupe les enveloppes des sollicitations provoquées par les trains les plus lourds, réels ou envisagés. Ce schéma est utilisé pour le dimensionnement des ouvrages, pour des calculs statique et de fatigue. Le chargement réel est celui du TGV : ce dernier est utilisé pour le dimensionnement sous sollicitation dynamique. Ces deux types de convois sont décrits dans le livret 2.01 de la SNCF [SNC.95]. Ils sont définis de façon linéaire car la plupart des calculs réalisés au niveau des projets de ponts s’effectuent en grillage de poutre. Dans cette partie, nous présenterons les différents cas de charge et nous les adapterons de façon à les utiliser sur notre ouvrage.
30 m
3,2 m File de nœuds de l’appui 1 (20 nœuds) U1,U2,U3, θ1, θ2 et
θ3 bloquées
File de nœuds de l’appui 2 (20 nœuds)
U1,U3, θ2 et θ3 bloquées
U2
θ1
θ3
U1
U3
θ2

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
58
4.1. LE POIDS PROPRE Le poids propre de la structure est composé du poids des poutres principales, des éléments transversaux, de la dalle et du ballast. Il est calculé en fonction de la densité des matériaux. La densité de l’acier est considérée de façon générale à 7850 Kg/m3. Celle du béton est prise à 2500 Kg/m3 ce qui englobe la masse des armatures. Outre ces deux matériaux, le ballast a un rôle important dans le calcul du poids propre de l’ouvrage, sa densité vaut 2000 Kg/m3. Ce dernier est considéré comme uniformément réparti sur l’ensemble du tablier avec une épaisseur de 0,6 m. Le tableau suivant illustre la répartition du poids propre du pont de Bonpas. 88% du poids propre du pont provient de la dalle et du ballast. Masse (kg) % sur le
total Poutres principales 90 809 9 % Diaphragmes 25 411 3 % Dalle 384 000 40 % Ballast 460 800 48 % Total 961 020 Tableau 2.1 : répartition du poids propre Le ballast est considéré dans notre étude avec une épaisseur fixe répartie sur l’ensemble du tablier. Réglementairement, l’épaisseur du ballast augmente au cours de la vie de l’ouvrage du fait des opérations de maintenance. Cette augmentation qui est forfaitairement de 30 % est négligée dans notre étude afin de ne pas multiplier les cas de charges. Nous resterons dans la configuration du pont à son ouverture au trafic.
4.2. LE SCHÉMA DE CHARGE DE L’UIC 71 L’Union Internationale des Chemins de Fer a développé un schéma de charge communément appelé UIC 71. Ce schéma a été défini de telle sorte que les sollicitations calculées qui en résultent, pour les tabliers à travée simple, couvrent celles calculées sous les convois-types de référence composés des matériels existants les plus agressifs et circulant chacun à leur vitesse maximale autorisée. Ce schéma est défini par le livret 2.01 mais aussi par l’Eurocode 1 [AFN.03a]. Il est composé de quatre charges ponctuelles de 250 KN et de charges réparties de 80 KN/m. Figure 2.23 : Schéma de charge de l’UIC 71
0,8 m 0,8 m1,6 m 1,6 m 1,6 m
4 x 250 KN
80 KN/m 80 KN/m

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
59
Les charges réparties de 80 KN/m n’ont pas de dimension limite sur l’ouvrage. Elles doivent être positionnées pour créer les sollicitations les plus importantes. Ce schéma de charge est à une dimension. Charger un pont avec des charges ponctuelles de 250 KN est très pénalisant localement vis à vis de l’effort tranchant. De plus, le ballast qui maintient la voie sur l’ouvrage permet de diffuser les efforts. Nous avons donc réparti ce chargement conformément au livret 2.01 de la SNCF qui considère que le ballast a un rôle de répartition transversale important. Figure 2.24 : Répartition transversale des charges liée à la présence du ballast La force d’essieu ponctuelle de 250 KN se répartie sur une bande longitudinale continue de largeur : 2,25 + 2
e soit dans notre cas sur 2,8 m.
Cette répartition transversale doit s’accompagner d’une répartition longitudinale des forces afin d’obtenir une charge répartie. Or aucune indication n’existe sur cette répartition longitudinale. Cependant, le schéma du chargement de l’UIC ci-dessus nous permet de déterminer cette répartition en considérant que chaque force ponctuelle de 250 KN s’applique sur une zone de 1,6 m. Comme nous avons quatre forces, la zone concernée sera de 6,4 m linéaire. Ainsi sur notre structure, le chargement réparti est appliqué sur une surface de 2,8 m de façon transversale et de 6,4 m de façon longitudinale.
2P
2P
0,23 m
0,6 m
0,4 m
traverse
ballast
dalle
2,25 + 2e
e

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
60
Figure 2.25 : Vue de dessus du chargement sur le maillage Les 4 forces ponctuelles de 250KN de l’UIC sont remplacées par une charge répartie sur une surface de 6,4 x 2,8 m, soit :
8,24,62504 250 ×
×=q =55,8 KN/m2.
La charge répartie de 80 KN/ml de l’UIC est répartie de façon transversale sur une zone de 2,8 m, soit :
8,280 80 =q =28,6 KN/m2.
Cette modélisation permet d’obtenir un chargement plus représentatif de la réalité. Ainsi une partie du chargement est au droit d’une poutre centrale qui reprend alors mieux les efforts que dans le cas d’une force ponctuelle. Mais bien que cette poutre reprenne mieux les efforts, le chargement reste désaxé par rapport à son centre de gravité donc la répartition transversale de notre chargement reste conforme à la sollicitation recherchée.
Forces réparties UIC 55,8 KN/m2
2,8 m
3,2 m
Axe de symétrie
12,8m
15 m
poutre poutre poutre poutre
Axe de chargement
(voie)
Forces réparties UIC 28,6 KN/m2
Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
61
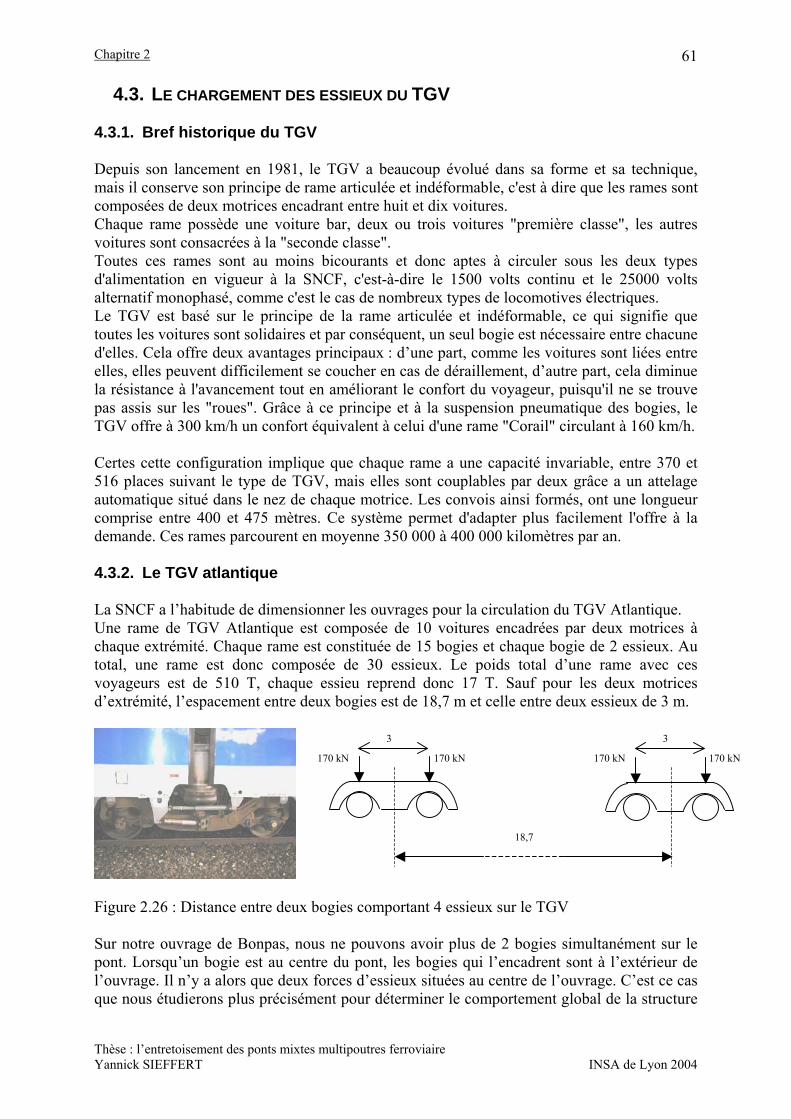
4.3. LE CHARGEMENT DES ESSIEUX DU TGV 4.3.1. Bref historique du TGV Depuis son lancement en 1981, le TGV a beaucoup évolué dans sa forme et sa technique, mais il conserve son principe de rame articulée et indéformable, c'est à dire que les rames sont composées de deux motrices encadrant entre huit et dix voitures. Chaque rame possède une voiture bar, deux ou trois voitures "première classe", les autres voitures sont consacrées à la "seconde classe". Toutes ces rames sont au moins bicourants et donc aptes à circuler sous les deux types d'alimentation en vigueur à la SNCF, c'est-à-dire le 1500 volts continu et le 25000 volts alternatif monophasé, comme c'est le cas de nombreux types de locomotives électriques. Le TGV est basé sur le principe de la rame articulée et indéformable, ce qui signifie que toutes les voitures sont solidaires et par conséquent, un seul bogie est nécessaire entre chacune d'elles. Cela offre deux avantages principaux : d’une part, comme les voitures sont liées entre elles, elles peuvent difficilement se coucher en cas de déraillement, d’autre part, cela diminue la résistance à l'avancement tout en améliorant le confort du voyageur, puisqu'il ne se trouve pas assis sur les "roues". Grâce à ce principe et à la suspension pneumatique des bogies, le TGV offre à 300 km/h un confort équivalent à celui d'une rame "Corail" circulant à 160 km/h. Certes cette configuration implique que chaque rame a une capacité invariable, entre 370 et 516 places suivant le type de TGV, mais elles sont couplables par deux grâce a un attelage automatique situé dans le nez de chaque motrice. Les convois ainsi formés, ont une longueur comprise entre 400 et 475 mètres. Ce système permet d'adapter plus facilement l'offre à la demande. Ces rames parcourent en moyenne 350 000 à 400 000 kilomètres par an. 4.3.2. Le TGV atlantique La SNCF a l’habitude de dimensionner les ouvrages pour la circulation du TGV Atlantique. Une rame de TGV Atlantique est composée de 10 voitures encadrées par deux motrices à chaque extrémité. Chaque rame est constituée de 15 bogies et chaque bogie de 2 essieux. Au total, une rame est donc composée de 30 essieux. Le poids total d’une rame avec ces voyageurs est de 510 T, chaque essieu reprend donc 17 T. Sauf pour les deux motrices d’extrémité, l’espacement entre deux bogies est de 18,7 m et celle entre deux essieux de 3 m.
Figure 2.26 : Distance entre deux bogies comportant 4 essieux sur le TGV Sur notre ouvrage de Bonpas, nous ne pouvons avoir plus de 2 bogies simultanément sur le pont. Lorsqu’un bogie est au centre du pont, les bogies qui l’encadrent sont à l’extérieur de l’ouvrage. Il n’y a alors que deux forces d’essieux situées au centre de l’ouvrage. C’est ce cas que nous étudierons plus précisément pour déterminer le comportement global de la structure
33
170 kN
18,7
170 kN 170 kN 170 kN

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
62
en statique. La charge étant au droit du diaphragme, l’influence de ce dernier est alors prépondérant dans la réponse de la structure. Pour les mêmes raisons que pour le chargement de type UIC, nous répartissons les forces ponctuelles de 170 kN des deux essieux séparés de 3 m par un chargement surfacique. Ainsi nous limitons l’impact de l’effort tranchant dû aux forces ponctuelles et nous prenons mieux en compte le rôle de répartiteur du ballast. Chacune des forces d’essieu sera répartie de façon transversale sur une distance de 2,80 m comme indiqué sur le schéma de la figure 2.25. Pour la répartition longitudinale, nous prenons en compte de façon plus précise la répartition d’une roue sur les traverses de la voie (fig. 2.27). Nous nous sommes inspiré du livret 2.01 de la SNCF qui propose une répartition longitudinale d’une demi force d’essieu située au droit d’une traverse sur les deux traverses voisines dans le cas d’une pause de voie sans ballast. Les traverses sont toujours espacées de 0,6 m. Nous avons adapté cette répartition comme indiqué sur le schéma ci-dessous.
Figure 2.27 : Répartition transversale d’une force sur trois traverses Ainsi, nous avons pu discrétiser le chargement d’un bogie sur notre ouvrage en passant d’abord à la répartition d’une force ponctuelle sur trois traverses puis en transformant cette répartition en charge surfacique (fig. 2.28).
Figure 2.28 : Répartition longitudinale des forces ponctuelles d’un bogie par des forces réparties Cette répartition des efforts à l’avantage de s’approcher de celle d’une roue d’essieu puisque la sollicitation est plus importante au droit de cette roue. De plus, une zone non chargée de 1,2 m est conservée afin de bien différencier l’impact de chaque essieu sur la voie. Cependant, nous devons encore transformer cette répartition longitudinale par rapport à notre maillage pour pouvoir l’inscrire dans notre modèle. La taille de nos éléments dans cette direction est de 0,25 m. Certes nous pourrions modifier notre maillage dans le sens longitudinal afin d’avoir
0,2 P 0,2 P
0,6 m0,6 m
0,2 P 0,2 P
0,6 m0,6 m
3,0 m
0,6 m 0,6 m
0,6 P 0,6 P
1,2 m
0,2 P 0,2 P 0,6 P
P
rail
traverse
0,6 m 0,6 m
Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
63
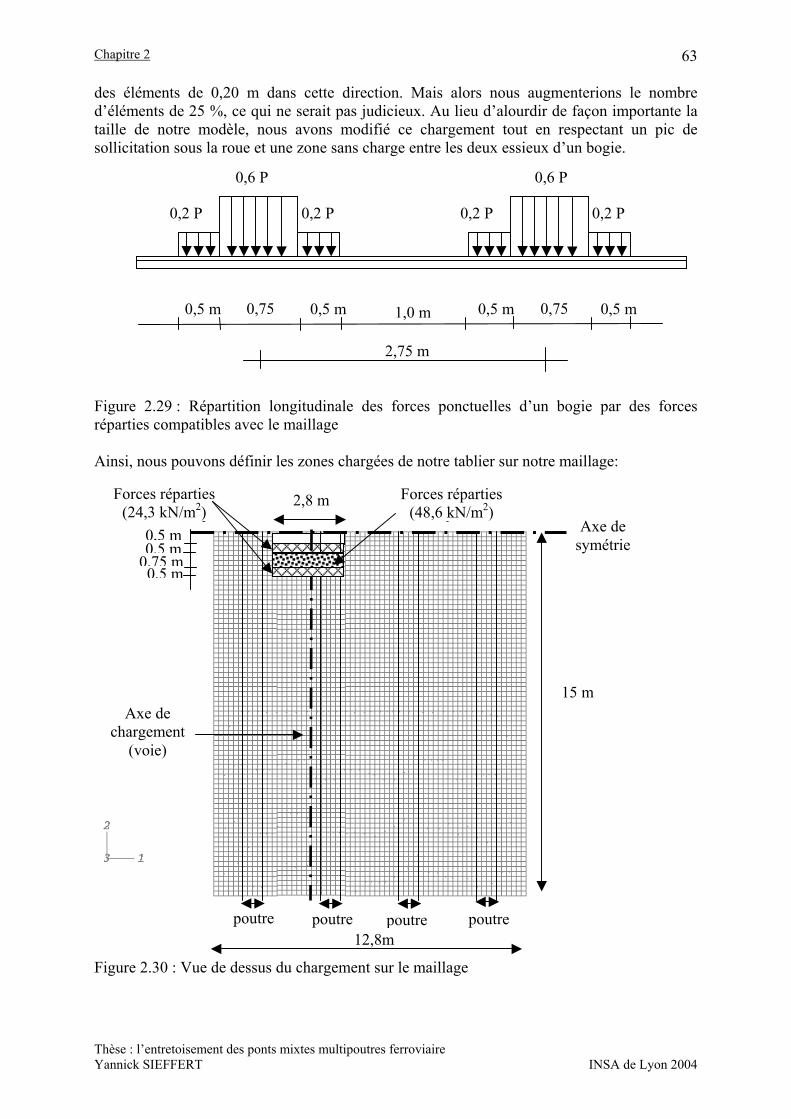
des éléments de 0,20 m dans cette direction. Mais alors nous augmenterions le nombre d’éléments de 25 %, ce qui ne serait pas judicieux. Au lieu d’alourdir de façon importante la taille de notre modèle, nous avons modifié ce chargement tout en respectant un pic de sollicitation sous la roue et une zone sans charge entre les deux essieux d’un bogie.
Figure 2.29 : Répartition longitudinale des forces ponctuelles d’un bogie par des forces réparties compatibles avec le maillage Ainsi, nous pouvons définir les zones chargées de notre tablier sur notre maillage:
Figure 2.30 : Vue de dessus du chargement sur le maillage
0,5 m0,75 0,75 0,5 m
2,75 m
0,5 m 0,5 m
0,2 P 0,2 P 0,2 P 0,2 P
1,0 m
Forces réparties (48,6 kN/m2)
2
2,8 m
0,5 m Axe de symétrie
12,8m
15 m
poutre poutre poutre poutre
Axe de chargement
(voie)
Forces réparties (24,3 kN/m2)
2
0,5 m0,75 m0,5 m
0,6 P 0,6 P

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
64
5. MODÉLISATION DU COMPORTEMENT MÉCANIQUE DU BÉTON Les ouvrages mixtes sont constitués de deux matériaux : l’acier et le béton. La modélisation de l’acier ne pose aucun souci spécifique car son comportement mécanique est relativement simple. La théorie de la mécanique des milieux continus permet de décrire son comportement plastique grâce à des critères de plasticité de type Von Mises. La modélisation du béton est bien moins évidente et son comportement mécanique est encore aujourd’hui très mal décrit par les logiciels utilisant la méthode des éléments finis. En effet, le développement de micro-fissures très rapidement obtenues en traction, génère d’énormes difficultés de convergences de ces logiciels. Le comportement du béton est très fortement hétérogène et la mécanique des milieux continus est un outils relativement mal adapté dans ce cas de figure. C’est pourquoi un grand nombre d’études sur les ouvrages d’art négligent totalement le comportement plastique du béton en le considérant comme un matériau parfaitement élastique [STE.64, YOO.86, ZHA.03]. Cependant, l’entretoisement intermédiaire a une influence sur la fissuration du béton [ZHO.04]. Notre étude ne pourrait être complète sans une analyse de la fissuration du béton.
5.1. ASPECT PHÉNOMÉNOLOGIQUE DU BÉTON Le béton est un matériau composite constitué d’une matrice de ciment et d’inclusions de granulats ou d’agrégats (sables, graviers). A l’hétérogénéité de la composition du béton vient s’ajouter celle dite structurelle et qui consiste à l’existence de défauts initiaux (microfissures) entre l’interface des granulats et de la pâte de ciment qui constitue le lien le plus faible du matériau. Des microfissures peuvent également être générées dans le ciment par différents facteurs, tels que le retrait hydraulique engendré par une évaporation de l’eau, le retrait thermique engendré par une variation de température ou une consolidation incomplète du ciment entraînant la formation de microcavités [NEV.00]. Lorsque le béton est soumis à une sollicitation, des microfissures supplémentaires peuvent se former suite à des concentrations de contraintes isolées dues à des déformations incompatibles entre les granulats et le ciment. Ces microfissures peuvent éventuellement se rejoindre pour un chargement plus important et former alors une macrofissure entraînant la rupture du matériau. A l’échelle macrostructurelle, le développement de macrofissures est accompagné par une diminution des contraintes et d’une augmentation de déformations. Ce comportement dit adoucissant ou quasi-fragile est associé à un phénomène de localisation des déformations. En effet, le mode de déformation est non homogène, c’est-à-dire que les déformations se concentrent dans des zones localisées de faibles dimensions (le long des macrofissures dans le cas du béton) alors que tout le reste du béton à tendance à se décharger. De par sa nature hétérogène, le béton présente donc un comportement mécanique très complexe englobant un comportement fortement non linéaire sous un état de contraintes multiaxiales.
5.2. CADRE THÉORIQUE DE LA MODÉLISATION DU BÉTON Les modèles présentés dans cette partie considèrent que le béton est un matériau homogène puisque l’échelle des applications numériques est en général suffisamment élevée pour permettre cette hypothèse. La principale difficulté de la modélisation du béton par éléments finis est engendrée par la nature même de la fissure. En effet, une fissure est une discontinuité géométrique qui divise le matériau alors que la méthode des éléments finis est une technique basée essentiellement sur la mécanique des milieux continus. Ce paradoxe entre le problème posé et l’outil de modélisation nécessite le développement de schémas spécifiques.

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
65
Les premiers travaux en matière de modélisation de fissuration ont été ceux de Ngo et Scordelis en 1967 [NGO.67] qui ont introduit le concept de la fissuration discrète et ceux de Rashid en 1968 [RAS.68] qui introduit le concept de la fissuration diffuse. 5.2.1. La fissure discrète Un nœud du maillage est divisé en deux nœuds distincts lorsque le critère de fissuration est violé. La figure ci-dessous montre l’évolution du maillage pendant la création d’une fissure. Cette technique de prise en compte de la fissuration semble véritablement proche de la réalité. Cependant, il est clair que le problème peut devenir numériquement lourd car le maillage est constamment reconstruit et le nombre de degrés de liberté croit rapidement. De plus, la direction des fissures est conditionnée par la direction des lignes du maillage [GEO.98].
Figure 2.31 : Modèle discret de fissure 5.2.2. La fissure diffuse La théorie de la plasticité assimile les microfissures du béton à des déformations irréversibles indépendantes du temps. Elle est basée sur une approche thermodynamique qui introduit un milieu continu homogénéisé équivalent au milieu réel et qui représente les phénomènes physiques microscopiques par des « variables internes » macroscopiques. Cette théorie est largement détaillée aujourd’hui dans de nombreux ouvrages, citons par exemple celui de Lemaitre et Chaboche [LEM.01]. Nous allons dans cette partie présenter le modèle béton du logiciel Abaqus version 631 et le cadre sa formulation.
5.3. UN MODÈLE ELASTOPLASTIQUE POUR LE BÉTON Le béton est un matériau qui appartient à la famille des matériaux quasi-fragile. Pour des charges relativement faibles, le béton reste dans le domaine élastique, c’est-à-dire que les déformations sont le résultat de mouvements quasi réversibles d’atomes. Pour des sollicitations plus importantes, la rupture a lieu rapidement d’où le caractère fragile de ce matériau. C’est le phénomène de la décohésion pâte-grains qui donne alors lieu à des déformations permanentes et de ruptures. Des glissements apparaissent dans les cristaux des grains, contribuant eux aussi à la déformation permanente qui se produit à volume constant [LEM.01]. Le comportement fragile du béton disparaît lorsque la pression de confinement est suffisamment importante pour empêcher la propagation des fissures. La rupture dépend alors de la consolidation et de l’affaiblissement de la structure microporeuse [SIE.01]. Cependant,
Avant fissuration Après fissuration

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
66
le modèle présenté ici n’intègre pas le comportement du béton confiné afin de rester dans un modèle de matériau quasi-fragile. Le modèle béton « damaged plasticity model for concrete and other quasi-brittle materials » d’Abaqus 631 [HIB.02] permet de gérer les problèmes de plasticité couplés à l’endommagement du béton non visqueux. Il est basé sur une approche de fissuration répartie. Nous n’utiliserons pas dans le cadre de cette thèse le paramètre d’endommagement du modèle. 5.3.1. Hypothèse de partition La théorie de la plasticité permet de décrire le caractère irréversible des déformations que l’on appellera εp. La partition de la déformation totale est effectuée en une partie élastique et une partie plastique ou permanente. Les déformations élastiques mettent en œuvre une énergie dite élastique réversible qui est donc restituée lors de toute décharge, tandis que les déformations plastiques conduisent à la dissipation en chaleur d’une énergie irréversible.
plel εεε &&& += (2.1) Rappelons que dans le cadre d’une théorie de petite déformation, le tenseur de déformation ε est obtenu à partir du premier gradient du champs de déplacement ( )zyx uuu ,,=u tel que :
)(21 ,, ijjiij uu +=ε (2.2)
5.3.2. Relation contrainte-déformation La relation contrainte-déformation est définie par : )( : plel εεD −=σ dans laquelle elD est la matrice de raideur élastique. 5.3.3. Loi d’écrouissage. La loi d’écrouissage est isotrope. L’évolution de la surface de charge est gouvernée par une seule variable scalaire : la déformation plastique cumulée plε~ (equivalent plastic strain). L’écrouissage isotrope correspond à une dilatation simple du critère initial, comme le rappelle la figure ci-dessous dans l’espace des contraintes et la courbe contrainte-déformation plastique en traction-compression.

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
67
Figure 2.32 : Ecrouissage istrope (d’après [LEM.01]) Cette figure montre pourquoi la déformation plastique cumulée peut être employée comme variable d’écrouissage isotrope : les points M et M’ ont même état et même déformation plastique cumulée : OI+IP=OI+IP’. Le taux de déformation plastique équivalent (equivalent plastic) est :
plplpl εε &&& : 23 ~ =ε (2.3)
et ainsi la déformation plastique cumulée : ∫=t plpl dt0
~ ~ εε & (2.4)
Comme le comportement du béton est différent en traction et en compression, le modèle béton d’Abaqus prend en compte deux variables d’écrouissage indépendantes pl
tε~ et pl
cε~ .
L’évolution des variables d’écrouissage est donnée par :
⎥⎥⎦
⎤
⎢⎢⎣
⎡= pl
c
pltpl
εε~~
~ε ; plplpl h εεε && )~,( ~ ⋅= σ (2.5)
Les micro-fissures en traction et les « écrasements » en compression sont représentés par une augmentation des valeurs des variables d’écrouissages. Ces variables contrôlent l’évolution de la surface de charge. 5.3.4. Fonction de charge A tout modèle élasto-plastique est associé un critère de plasticité qui définit le domaine d’élasticité dans lequel le comportement du matériau reste réversible. Il définit également le domaine plastique et permet ainsi de spécifier quand a lieu l’écoulement plastique. Cette fonction est appelée fonction de charge ou critère de charge. En écrouissage isotrope, cette surface de charge est caractérisée par une fonction f qui dépend de l’état de contrainte σ et d’un paramètre scalaire plε~ représentant l’écrouissage. Le modèle Abaqus prend en compte deux variables scalaires d’écrouissage qui est alors un vecteur plε~ .
0 )~,( =plf εσ . (2.6)

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
68
L’écoulement plastique a lieu lorsque le point représentant l’état de contrainte est sur la surface de charge. Ce point doit rester sur cette surface le long de l’écoulement plastique, ce qui conduit à la condition de consistance :
0 )~,( =plf εσ& . (2.7) L’état de décharge se produit pour 0 )~,( =plf εσ et 0 )~,( ≤plf εσ& (2.8) Le modèle d’élasto-plastique du béton utilise la fonction de charge développée par Lubliner et al. [LUB.89] et incorpore de plus les modifications proposées par Lee et Fenves [LEE.98] pour tenir compte des évolutions différentes de résistance entre la tension et la compression :
( ) 0 )~( ˆ ˆ )~(3 -11 )~,( maxmax ≤−−−+−= pl
ccplpl pqf εσσγσβα
αεεσ (2.9)
dans laquelle :
Iσ : 31 −=p est la pression hydrostatique,
SS : 23 =q est la contrainte équivalente de Von Mises pour laquelle
σIS += p est le tenseur du déviateur du tenseur des contraintes σ , maxσ̂ est la valeur algébrique maximum des valeurs propres de σ .
Les contraintes principales de σ sont les solutions de : det [ ]Iσ λ− =0, c’est-à-dire les racines de l’équation du troisième degré suivante :
−+−−−−+++++− 231312332211212
213
223331133222211
23322
3 2()()(11
σσσσσσλσσσσσσσσσλσσσλ
0)21233
21322
22311 =−− σσσσσσ (2.10)
maxσ̂ est alors la plus grande valeur algébrique de ces racines tel que maxσ̂ ≥ moyσ̂ ≥ minσ̂
La fonction )~( plεβ est donnée par : )1( )1()~()~(
)~( ααεσεσ
β +−−= pltt
plccplε dans laquelle )~( pl
cc εσ et
)~( pltt εσ sont respectivement les valeurs de la contrainte uniaxiale de compression et de
traction définie par l’utilisateur dans le jeu de données. Le coefficient α est déterminé par la contrainte élastique en compression uniaxiale 0cσ et par la contrainte élastique en compression biaxiale 0bσ :
00
00
2
cb
cb
σσ
σσα
−
−= (2.11)
Les valeurs expérimentales types donnent : 16,10
0 =c
b
σ
σ donc 12,0 =α [LUB.89].
Le coefficient γ est obtenu par : 12)1(3
−
−=
c
c
KK
γ où Kc est une constante : Kc = 32 , ainsi γ =3.
Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
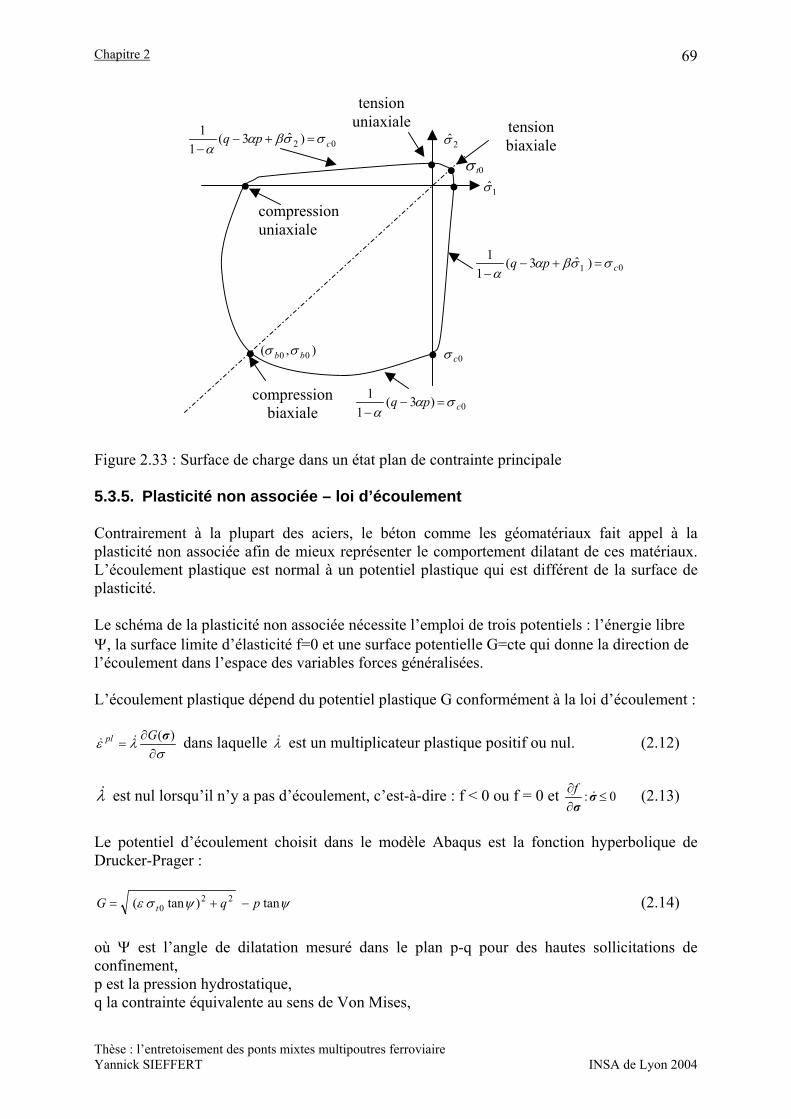
69
Figure 2.33 : Surface de charge dans un état plan de contrainte principale 5.3.5. Plasticité non associée – loi d’écoulement Contrairement à la plupart des aciers, le béton comme les géomatériaux fait appel à la plasticité non associée afin de mieux représenter le comportement dilatant de ces matériaux. L’écoulement plastique est normal à un potentiel plastique qui est différent de la surface de plasticité. Le schéma de la plasticité non associée nécessite l’emploi de trois potentiels : l’énergie libre Ψ, la surface limite d’élasticité f=0 et une surface potentielle G=cte qui donne la direction de l’écoulement dans l’espace des variables forces généralisées. L’écoulement plastique dépend du potentiel plastique G conformément à la loi d’écoulement :
σλε
∂∂
=)(σGpl && dans laquelle λ& est un multiplicateur plastique positif ou nul. (2.12)
λ& est nul lorsqu’il n’y a pas d’écoulement, c’est-à-dire : f < 0 ou f = 0 et 0 : ≤
∂∂ σσ
&f (2.13)
Le potentiel d’écoulement choisit dans le modèle Abaqus est la fonction hyperbolique de Drucker-Prager :
ψψσε tan )tan ( 220 pqG t −+= (2.14)
où Ψ est l’angle de dilatation mesuré dans le plan p-q pour des hautes sollicitations de confinement, p est la pression hydrostatique, q la contrainte équivalente au sens de Von Mises,
2σ̂
1σ̂. .
.
.
. 01 )ˆ3 (
11
cpq σσβαα
=+−−
02 )ˆ3 (1
1cpq σσβα
α=+−
−0tσ
),( 00 bb σσ
tension uniaxiale . tension
biaxiale
compression uniaxiale
compression biaxiale
0cσ
0 )3 (1
1cpq σα
α=−
−

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
70
0tσ est la contrainte de traction uniaxiale à la rupture et ε est un paramètre qui se réfère à une excentricité et qui définit le taux pour lequel la fonction approche de l’asymptote. 5.3.6. Visualisation des fissures Figure 2.34 : Direction des fissures L’initiation d’une fissure en un point a lieu lorsque la variable plastique d’écrouissage
⎥⎥⎦
⎤
⎢⎢⎣
⎡= pl
c
pltpl
εε~~
~ε est plus grande que zéro et lorsque la plus grande déformation plastique dans le
repère principal des déformations est positive : 0 ˆmax ≥plε .
La direction des fissures en ce point est alors orthogonale à la direction de la contrainte maximale principale. 5.3.7. Conclusion sur le modèle élastoplastique Le modèle que nous venons de présenter est l’aboutissement des travaux de différents chercheurs [OLL.90, LUB.89, LEE.98]. Cependant, les modèles béton des logiciels aux éléments finis comme Abaqus sont souvent peu robustes et ils finissent par diverger rapidement dès que le critère de fissuration est atteint [ZHO.04]. Leur utilisation est donc particulièrement délicate : le problème majeur de ces logiciels est la forte localisation des déformations. Pour éviter au maximum les divergences numériques, le paramètre principal est la définition de la loi contrainte-déformation puisque cette dernière permet de calculer les valeurs d’écrouissage. Cette loi ne doit pas poser des problèmes d’intégration numérique. L’utilisation des énergies de fissuration permet d’offrir a l’algorithme du modèle une bonne capacité de convergence. La partie suivante de ce chapitre traite de cette difficulté.
5.4. PROBLÈME DE LOCALISATION DES DÉFORMATIONS 5.4.1. Comportement adoucissant L’hétérogénéité du matériau béton conduit à son comportement non linéaire et fait appel à l’utilisation de la mécanique de rupture non linéaire. Cette dernière nécessite que la zone proche du front de fracture ne soit pas trop importante. Le comportement du béton peut alors être considéré comme similaire à celui ductile de l’acier à la différence près que son comportement post pic des déformations est beaucoup plus adoucissant (strain-softening) à
x
y
y’ x’

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
71
cause de la grande taille des agrégats. Ainsi la théorie non linéaire de fracture développée pour l’acier ne peut pas être transposée directement au béton. Bazant et Oh [BAZ.83] décrivent le comportement du béton en faisant l’hypothèse que la fracture dans un matériau hétérogène peut être modélisée par un matériau équivalent homogène, en remplaçant la fissure par une bande parallèle, densément remplie de microfissures uniformément réparties. 5.4.2. Energie de fissuration Le béton appartient à la famille des matériaux fragiles. A partir d’un certain niveau de chargement, les essais en laboratoire (compression uniaxiale) montrent une concentration des déformations suivie d’un accroissement rapide de ces déformations dans des zones d’épaisseur faible. D’un point de vue mécanique, l’apparition d’une bande de localisation est associée à celle d’une surface de discontinuité des déformations. Les équations aux dérivées partielles gouvernant l’équilibre changent alors de nature et il s’ensuit que le problème décrivant l’équilibre devient mal posé. En statique, le problème d’équilibre est caractérisé par une perte d’ellipticité conduisant à l’existence d’une infinité de solutions, dont certaines présentent des discontinuités du champ de déplacement [PEE.02]. Différentes approches, dites de régularisation ont été suggérées pour préserver la nature des équations. Ceci se traduit le plus souvent par l’introduction d’un paramètre longueur caractéristique dans le modèle jouant le rôle de limitateur de localisation et rendant compte du caractère fini de la zone localisée. Hillerborg en 1976 [HIL.76] choisit pour le milieu un pseudo-comportement qui dépend de la finesse du maillage. Il fait ainsi dépendre la pente post-pic de la relation contrainte-déformation avec la taille de l’élément de manière à dissiper à la rupture une énergie de fissuration constante. Cette approche constitue une avancée vers une description non locale du milieu continu. Elle est basée sur une loi issue de la mécanique de la rupture selon laquelle l’énergie de fissuration en mode I est définie par :
∫=u
f duG0
σ où u est le déplacement d’ouverture des fissures.
Figure 2.35 : Représentation d’une fissure discrète par une fissuration répartie [MEF.97] Dans une approche par fissuration répartie, la fissuration est représentée par une zone de localisation de taille w dans laquelle la déformation plastique εp est uniformément répartie.
u
σ σ
w
σ σ
εp

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
72
L’énergie de fissuration peut alors être exprimée:
∫ ==uk
0 ff gwdkwG σ (2.15)
où gf est l’énergie locale de fissuration représentée par l’aire sous le diagramme d’écrouissage (figure 2.36). Figure 2.36 : Diagramme d’adoucissement linéaire du béton en traction Cette approche considère l’énergie de déformation Gf comme un paramètre caractéristique constant du matériau. Ainsi Bazant & Oh [BAZ.83] évitent la sensibilité de la solution à la taille du maillage. Le paramètre d’écrouissage ku est calculé de manière à ce que le paramètre local gf dissipe l’énergie de fissuration Gf sur l’élément. Dans le cas du comportement adoucissant linéaire, l’expression de la déformation plastique ultime est établie en fonction de la taille de l’élément fini wc :
ct
f
t
fu wf
Gf
gk
2 2 == (2.16)
Prenons en compte une loi uniaxiale contrainte-défomation plastique provenant de l’expérimentation. Celle-ci n’est en réalité pas linéaire. Les aires sous les courbes sont respectivement gt et gc ; ce sont les énergies locales de fissuration. Figure 2.37 : Courbe uniaxiale contrainte déformation plastique en traction (a) et en compression (b) La loi d’écrouissage est alors donnée par : [OLL.90]
ku
σ0=ft
gf
σ
k
gt
gc
ft0 fc0
εcp
εtp
εp εp
σσ
(a) (b)

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
73
∫=p
t pt
t
p dg
kε
εσ0
1 en traction uniaxiale, et (2.17)
∫=pc p
cc
p dg
kε
εσ0
1 en compression uniaxiale. (2.18)
La loi d’écrouissage )( pkf=σ doit satisfaire :
0)0( tt ff = et 0)1( =tf en traction et, (2.19) 0)0( cc ff = et 0)1( =fc en compression. (2.20)
Figure 2.38 : Loi d’écoulement en compression et en traction
La densité d’énergie de fissuration est donnée par : pxx dkg ∫
∞=
0σ (2.21)
Pour maintenir l’objectivité des résultats au niveau structurel, Oller et al. [OLL.90] s’appuient sur les études de Bazant et Oh [BAZ.83] et éliminent au maximum la sensibilité du modèle au maillage en posant :
c
tt l
Gg = et
c
cc l
Gg = avec Gt , Gc, lc respectivement l’énergie de fissuration en traction,
l’énergie de fissuration en compression et la longueur caractéristique d’un élément du maillage. 5.4.3. Loi uniaxiale de comportement du béton: Dans le cadre de la théorie de la plasticité le comportement du matériau est géré par la connaissance de la courbe uniaxiale liant à chaque pas de temps la contrainte nominale à la variable d’écrouissage. C’est pourquoi il est important de définir correctement cette courbe afin de décrire le plus fidèlement possible le comportement réel du béton.
ft0
fc0
kp
σ
1

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
74
Dans le cas de la traction comme dans le cas de la compression, une relation exponentielle appropriée est utilisée :
( )[ ])2exp()exp(10 xxxxxxxx kbakbaf −−−+=σ (2.22) avec fx0 la contrainte limite d’élasticité et ax et bx deux paramètres du modèle déterminés à partir des essais uniaxiaux. La constante ax détermine si on a un écrouissage positif après avoir atteint la limite d’élasticité : at > 1 implique un écrouissage durcissant (hardening) et correspond au cas de la compression, ac < 1 implique un écrouissage adoucissant (softening) et correspond au cas de la traction. La densité d’énergie de fissuration nous donne en intégrant :
)2
1(00
x
x
xxx
abf
dkg +== ∫∞σ (2.23)
5.4.3.1. Cas de la traction
Les paramètres at et bt sont déterminés de sorte que cette courbe reproduise la réponse du matériau lors de la traction. Le comportement du béton en traction est supposé linéaire jusqu’au pic des contraintes. Or le paramètre at pilote le comportement avant le pic (en écrouissage positif), il ne représente donc pas une caractéristique physique pour le comportement du béton en traction. De ce fait, on peut choisir une valeur fixe pour ce paramètre : at = -0,5 donne une bonne représentation de la courbe uniaxiale.
La valeur de bt est alors : )2
1(0t
t
ctt
aGl
fb += (2.24)
5.4.3.2. Cas de la compression
Le comportement du béton en compression est supposé élastique jusqu’à sa limite d’élasticité fc0. Après cette limite, le béton présente un comportement écrouissable durcissant jusqu’à sa résistance en compression fc, qui se termine par une branche adoucissante. A partir de la loi d’écrouissage et de la valeur de la densité d’énergie de fissuration nous obtenons :
[ ])2exp( )exp()1(2 2
1 11 0
ppe p babaa
dg
kp
εεεσ −−−++
−== ∫ (2.25)
donc pour a≠0 : [ ] )2(1 11 )exp( kaaaa
b p ++−+=− ε (2.26)
en injectant cette expression dans l’équation de la contrainte sans distinguer la compression de
la traction, nous obtenons : ( ) ( ) ( )[ ]kkaafkf φφσ )1( 0 −+== , (2.27)
dans laquelle kaak )2(1)( ++=φ . (2.28)

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
75
Dans le cas de la compression a > 1 ; l’équation f(k) admet alors une valeur maximale :
aaf
fm 4)1(
2
0 += pour
0
2
00 )( 21 2
ff
ff
ff
a mmm −+−= . (2.29)
Dans le cas de la compression, la valeur maximale de cette fonction est obtenue au pic
cm ff = , ce qui nous permet d’exprimer 0
200
)( 21 2 c
c
c
c
c
cc f
fff
ffa −+−= . (2.30)
Par exemple, une valeur de cc ff 5,0 0 = nous donne ac = 5,8. Le paramètre bc peut maintenant s’obtenir facilement en utilisant le même procédé que pour la traction. Dans ce cas l’énergie de rupture en compression est utilisée :
)2
1(0c
c
ccc
aGl
fb += . (2.31)
5.4.4. Généralisation à l’état de contraintes multiaxiales Par mesure d’homogénéisation des notations, nous prendrons les mêmes conventions de signe que dans le logiciel ABAQUS soit σ > 0 pour des contraintes de traction et σ < 0 pour celles de compression. Nous allons étendre les définitions précédentes (obtenues pour un chargement uniaxial) à un état de contrainte pluriaxial. Dans un premier temps, considérons un état de contrainte purement de compression ou purement de traction (mais pas obligatoirement uniaxial). Nous notons les contraintes principales 1σ̂ , 2σ̂ et 3σ̂ dans l’ordre croissant tel que 1σ̂ ≥ 2σ̂ ≥ 3σ̂ . Nous avons alors bien 3σ̂ ≥ 0 pour un état de contrainte en traction pure et 1σ̂ ≤ 0 pour un état de contrainte en compression pure. Plus spécialement, si nous considérons une compression biaxiale, alors naturellement 1σ̂ = 0 (uniquement deux valeurs algébriques négatives pour les contraintes principales). Lubliner et al. (1989) démontrent que même dans le cas où la valeur du paramètre d’écrouissage k, correspondant au pic des contraintes, est la même pour la compression biaxiale et pour la compression uniaxiale, la formule n° 2.18 ne peut être utilisée en état de contrainte biaxial. Il propose une définition alternative de k dans un état de contrainte de compression pure :
pc
ckf
gk 3)(1 ε&& −= tel que 0 ≥ 1ε̂ ≥ 2ε̂ ≥ 3ε̂ . (2.32)
De façon analogue pour une traction pure pt
tkf
gk 1)(1 ε&& = tel que 1ε̂ ≥ 2ε̂ ≥ 3ε̂ ≥ 0. (2.33)
Finalement Lubliner et al. [LUB.89] considèrent un état de contrainte quelconque (ni purement en compression, ni purement en traction) et proposent l’équation suivante qui vérifie les relations :
pc
c
pt
tkf
grkf
grk 31 )()(1 )()( εε &&& σσ −
−= (2.34)
dans laquelle )(σr est un facteur poids qui dépend de σ et qui est compris entre 0 ≤ )(σr ≤ 1 et qui est tel que :
- dans le cas de la compression pure (toutes les valeurs algébriques des contraintes principales sont supérieures à zéro)
Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
76
)(σr = 0 - dans le cas de la traction pure (toutes les valeurs algébriques des contraintes
principales sont supérieures à zéro) )(σr = 1.
Cette fonction est l’opérateur : ∑
∑
=
== 3
1
3
1 )(
ii
ii
rσ
σσ (2.35)
Dans laquelle les parenthèses de Macauley )(21 xxx += . (2.36)
En exemple prenons le cas d’un état de contrainte biaxial tension-compression ( 1σ̂ > 0, 2σ̂ = 0, 3σ̂ <0) alors l’équation n° 2.34 devient :
pc
c
pt
tkf
gkf
gk 3
31
31
31
1 )(ˆˆ
ˆ1 )(ˆˆ
ˆ1 εσσ
σε
σσσ
&&&+
++
= (2.37)
5.4.5. Paramètres du modèle Nous venons de lister et d’expliquer les différents paramètres nécessaires au modèle plastique du béton implanté dans le logiciel Abaqus version 631. Nous allons maintenant qualifier les paramètres numériques que nous avons utilisés. L’ouvrage de la bretelle d’accès de Bonpas, comme les ouvrages mixtes habituels, est réalisé par la mise en place d’un béton B32. Sa résistance caractéristique à 28 jours à la rupture est donc de 32 MPa. Le béton a des propriétés visqueuses importantes. Il est de plus très sensible aux phénomènes de fluage [BER.03]. Les Eurocodes 4 [AFN.94] permettent de prendre en compte les effets du fluage de façon simplifiée en réduisant forfaitairement le module de Young en fonction de la durée de la sollicitation. Le passage d’un train est une sollicitation rapide, nous pouvons donc utiliser le coefficient d’équivalence n = 6 entre le module de Young de l’acier et du béton pour un chargement à court terme :
6==béton
acier
EE
n . Comme le module d’Young de l’acier est parfaitement connu et il vaut :
Eacier=210 000 MPa, alors celui du béton sera pris à Ebéton=35 000 MPa. L’article A.4.3,4 du BAEL [MIN.91] nous permet alors d’envisager la limite d’élasticité du béton (nous ne distinguerons pas les ELU et les ELS) à :
cc ff 57,00= ≈19 MPa. Nous pouvons aussi nous référer au BAEL afin de déterminer la résistance au pic à la traction du béton grâce à :
ct ff 06,06,00 += ≈2,0 MPa (ce qui nous place en sécurité) Comme nous venons de l’expliquer, la fonction de charge du béton nécessite d’introduire dans le jeu de donnée la courbe contrainte-déformation plastique en compression et en traction dans le cas d’un chargement uniaxial.

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
77
Cette courbe contrainte-déformation dépend de l’énergie de fissuration. Or cette énergie est relativement mal connue, comme le souligne Nechnech [NEC.00]. Pour un béton traditionnel, l’énergie de fissuration en traction se situe entre 0,05 et 2 Nmm/mm2 , ce qui est une fourchette large. Cependant Nechnech montre que la valeur de ≈tG 0,06 Nmm/mm2 conduit à des résultats numériques en adéquation avec des essais de traction pour des bétons ordinaires. La longueur caractéristique de notre maillage sera prise comme la plus faible longueur des éléments volumiques soit cl = 0,02 m. Ainsi nous obtenons tb =500 pour ta =-0,5 En ce qui concerne l’énergie de fissuration en compression, Nechnech montre qu’elle est 50 fois plus importante que celle en traction : cG =50 tG , ce qui nous donne : ≈cG 3 Nmm/mm2. Comme cf = 32 MPa et que 0cf = 19 MPa, alors nous avons d’après l’équation 2.30 :
=ca 4,5. Le paramètre cb avec la même longueur caractéristique cl =0,02 est alors : =cb 412. En définitive, nous obtenons la courbe contrainte-déformation suivante :
-35-30-25-20-15-10-505
-0,01 -0,008 -0,006 -0,004 -0,002 0 0,002 0,004
déformation
contrainte (MPa)
compression
traction
Figure 2.39 : Courbe contrainte-déformation du béton
6. MODÉLISATION DU COMPORTEMENT MECANIQUE DE L’ACIER
Afin d’assurer la pérennité de l’ouvrage et sa sécurité structurelle, l’acier qui constitue la charpente porteuse des ponts à poutres, doit travailler uniquement dans son domaine élastique Nous avons donc modéliser le matériau acier à l’aide d’une loi de comportement élasto-plastique parfaite sans écrouissage basée sur le critère tridimensionnel des contraintes de Von Mises. L’acier utilisé dans la conception du pont de Bonpas est un acier S355, la limite d’élasticité utilisée dans notre modèle est de 355 MPa. Nous considérons que lorsque ce matériau quitte le domaine élastique, l’ouvrage n’est plus apte à son exploitation. La même loi de comportement de l’acier est utilisée pour les armatures avec une limite d’élasticité de 500 MPa.

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
78
7. CONCLUSION : DÉFINITION D’UN PROGRAMME D’ANALYSE UTILSANT NOTRE MODÈLE NUMERIQUE
Dans ce chapitre, nous avons présenté l’ouvrage de référence de notre étude et sa modélisation tridimensionnelle à l’aide d’éléments finis. Nous avons aussi présenté et identifié les paramètres du modèle élastoplastique que nous utilisons pour décrire le comportement mécanique du béton. Le modèle numérique que nous venons de décrire peut servir de référence à toutes modélisations d’ouvrages d’art de ce type. Cependant, comme tout modèle numérique, sa validation est nécessaire. Dans cette optique, nous avons effectué des essais expérimentaux sur une maquette à l’échelle 1/5 du pont de Bonpas. Cette expérimentation fait l’objet du quatrième chapitre de cette thèse. Sans rentrer plus avant dans ce chapitre, nous soulignons à ce niveau, que les essais ont permis de valider complètement le modèle développé. Nous pouvons donc l’utiliser afin de juger de façon numérique de l’influence du diaphragme intermédiaire. Le rôle du diaphragme pouvant être multiple, nous analyserons toutes les configurations qui nous ont semblé pertinentes :
1) analyse statique : L’analyse statique est nécessaire pour dimensionner et comprendre le fonctionnement d’un ouvrage. Nous devons considérer le poids propre de l’ouvrage et le chargement des véhicules (UIC 71 et TGV). Cependant, le chargement statique des véhicules est très faible vis à vis du poids propre d’un pont ferroviaire. Le comportement transversal ne sera alors que faiblement mis en jeu sous ce type de sollicitation.
2) analyse à la rupture :
Afin de mettre en valeur le comportement transversal de l’ouvrage, nous augmenterons les charges des véhicules pour obtenir le comportement ultime de l’ouvrage sous une sollicitation désaxée (positionnée au droit d’une voie ferroviaire).
3) Analyse des modales :
La vitesse est un paramètre fondamental dans l’étude de ponts ferroviaires. La première étape consiste toujours à extraire les modes propres de la structure. Ils nous permettent de connaître les fréquences propres de l’ouvrage et la forme des modes propres.
4) Analyse dynamique : L’ analyse dynamique nous permet d’appréhender les phénomènes d’excitation d’un ouvrage sous le passage d’un train à grande vitesse. Le chargement correspondant au TGV est effectué en déplaçant le véhicule sur le pont à différentes vitesses.
5) Analyse au choc : Outre le fonctionnement normal d’un pont, le diaphragme peut avoir une influence sous une sollicitation latérale au niveau d’une poutre.

Chapitre 2
Thèse : l’entretoisement des ponts mixtes multipoutres ferroviaire Yannick SIEFFERT INSA de Lyon 2004
79
Ces différents analyses sont décrites dans le chapitre suivant, elles permettent de quantifier l’apport d’un diaphragme intermédiaire vis-à-vis du comportement d’un multipoutre.





























