Embed Size (px)
DESCRIPTION
Chapter 8 Polynomial Approach. I/O Model. where and are polynomials in forward-shift operator q. Basic assumptions i) deg B ( q ) < deg A ( q ) ii) A ( q ) and B ( q ) do not have any common factors. (coprime) - PowerPoint PPT Presentation
Citation preview

Robotics Research Labo-ratory
1
Chapter 8
Polynomial Approach

Robotics Research Labo-ratory
2
I/O Model
where and are polynomials in forward-shift operator q.
Basic assumptionsi) deg B(q) < deg A(q)ii) A(q) and B(q) do not have any common factors.
(coprime)iii) The polynomial of A(q) is monic.
(normalized for uniqueness)
Note: Pulse transfer functionB(z)/A(z)
A q
A q y k B q u k open-loop system 1
B q

Robotics Research Labo-ratory
where R(q), T(q) and S(q) are polynomials in forward-shift opera-tor. R(q) can be chosen so that the coefficient of the term of the highest power in q is unity.
Notes:
deg R(z) deg T(z)deg R(z) deg S(z) causal controller
cu yu ( ) ( )R q u k T q u k S q y kc ( )
( )
B q
A q
3
Controller ( ) ( )cR q u k T q u k S q y k 2
( ) ( ) / ( )( ) ( ) / ( )
ff
fb
H z T z R zH z S z R z

Robotics Research Labo-ratory
4
The characteristic polynomial of the closed-loop system
(( ( ) ( ) ( ) ( )) ( )) ( ) () 3cy kA q R q B B qq T q uS q k
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
4
5
cl
cl c
A z A z R z B z S z
A q y k B q T q u k
if there is a time delay in the control law of one sampling period
deg deg 1 deg 1
R TS

Robotics Research Labo-ratory
5
Pole Placement Design
Algebraic problem of finding polynomials R(z) and S(z) that satisfy (4) for given A(z), B(z) and Acl(z)
( ) ( ) ( )cl c oA z A z A z
where ( ) det( ) ( ) det( )
c
o
A z zI Φ ΓKA z zI Φ LC
( ) ( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )c c
cl c o
B z T z B z T zY z U z U zA z A z A z

Robotics Research Labo-ratory
6
It is natural to choose the polynomial T(z) so that it cancels the observer polynomial Ao(z).
where to is the desired static gain of the system.
( )( ) ( )( )
Then, oo o c
c
t B zT z t A z Y z U zA z
1
1
0
1
0
0
lim ( ) lim(1 ) ( )
( )1 lim ( )( )
If unit step is applied,(1)
lim ( ) 1(1)
1 / (1)
k z
czc
kc
c
y k z Y z
t B zz U zz A z
t By k
At A B

Robotics Research Labo-ratory
7
ex) Control of a double integrator
22
22
0
22 0
1 0 1
( ) ( ) ( ) ( )
( ) 1 ( ) 1 2
2 1 12
For ( ) 1, ( ) (proportional controller)
2 1 12
For ( ) , ( )
cl
cl
A q y k B q u khA z z B z z
hz z R z z S z A z
R z S z s
s hz z z
R z z r S z
A
s z s
z
22
1 0 1
2 2 23 2
1 0 1 0 1 1 1
2 1 12
( 2) 1 22 2 2
c
cl
lhz z z r z s z s A z
h h hz r s z A zr s z s z r s
+ ( + )
( + )

Robotics Research Labo-ratory
8
, ,( ).
cl
cl
r s sA z
z p z p z p
hr s
A z
1 0 1
3 21 2 3
2
1 0
It is possible to select the controller coefficients from the desired characteristic polynimial
(known poles by pole assignment)
2
( )
, ,
p
hr s s p
hr s p
p p p p p p p p pr s s
h h
1
2
1 0 1 2
2
1 1 3
1 2 3 1 2 3 1 2 31 0 12 2
2
2 12
2
This equation has the solution.3 5 3 3 3
4 2 2

Robotics Research Labo-ratory
9
Let A, B, and C be polynomials with real coefficients and X and Y unknown polynomials.
Then the above equation has a solution iff the greatest common factor of A and B divides C.
Notes:i) The Diophantine equation has many other names in literature,
the Bezout identity or the Aryabhatta’s identity.
ii)
iii) The extended Euclidean algorithm is a straightforward method to solve the Diophantine equation.
( )AX BY C
( ) ( ) ( ) ( ) ( )clA z R z B z S z A z
Diophantine Equation

Robotics Research Labo-ratory
10
x y x yx y
x x n y y n x y0 0 0 0
ex) 3 2 5 where and are integers. Then 1 and 1 is a solution.
2 and 3 where 3 2 5 are another solutions. - in
x y
finite number of solutions
ex) 4 6 1 (Diophantine equation without a solution)
Note: Diophantus of Alexandreia ( A.D. 246? ~ 330?) - one of the original invento
rs of algebra

Robotics Research Labo-ratory
11
-
-
-
( ) ( )( ) ( )
( )
( )
( ) ( )
( )
11 1
10 1 1
2 1 2 20 1
where
Let define a stable 2 1 th-degree polynimial as follows.
1 n nn n
n nn n
n n
Y z B zU z A z
A z z a z a z aB z b z b z b z b
n D zD z d z d z
-
-
( - )
( ) ( ) ( ) ( ) ( ) ( ) ( )
( )
( ) ( ) ( )
2 2 2 1
1 20 1 2
Then there exist unique 1 th-degree polynomials (z) and (z) such that i.e.,
where
c
n n
n n
l
n
d z d
n α β
α z A z β z B z D z A z B z
α z α z α z α
R z S A
z α
z z
-( )1
1 20 1 2 1
n
n nn nβ z β z β z β z β

Robotics Research Labo-ratory
12
1 1
1 1
1 1
1 2 0 1 2
1
In MATLAB, the Diophantine equation can be solved for and by using of the 2 2 Sylvester matrix .
0 0 0 0 0 00 0 0 0
0 0
1 00 1
n n
n n n n
n n n n
n
n
X Yn n E
a ba a b b
a a b ba b
a a b b b ba a
2 11
2 22
0
10 1 1 1
21 0 2 2
00 0
00 0 1 0 0
0 0 0 1 0 0 0
nn
nn
nn
n nn
n n n
dα
dα
αd
βb b b d
βa b b d
βb d
2 2 Sylverster matrix Note: It is nonsingular i
f
f the polynomia
n EM
nE D
ls and do not have any common factors.
A B

Robotics Research Labo-ratory
13
) ( ) .
( )
( )
( ) ( ) ( ) ( ) ( )( ) , ( )
..
2 21 2
20 1 2
3 3 20 1 2 3
0 1 0 1
ex 0 5
2
where
0 5 0 2 01 0 5 1 2
1 1 0 10 1 0 0
A z z z z a z aB z z b z b z b
D z z d z d z d z d
A z α z B z β z D zα z α z α β z β z β
E
..
, ,..
( ) . , ( ) . .
( ) ( ) ( ) ( )
1
0 1 0 1
3
0 1 20 1 0
0 0 31 0 2
1 2 0 2 0 3
Notice that
D M E D
α z α z α z β z β z β z
A z α z B z β z z

Robotics Research Labo-ratory
14
2
1 2
( ) 0.02( 1)ex) ( ) ( 1)
1 0.2 0.02 or ( 1) ( ) ( )
0 1 0.2
( ) 1 0 ( )
Desired poles: 0.6 0.4, 0.6 0.4 Reduced observer : ( ) 0
Y z zU z z
x k x k u k
y k x k
z j z jφ z z
Regulator Design by Pole Placement – state space approach

Robotics Research Labo-ratory
15
(
1
)
2
( )( ) ( ) 8 3.2
( )
( 1) 8 ( 1) 3.2 5 ( 1) ( 1)
24 ( 1) 16 ( ) .032 ( )( 1) 0.32 ( ) 24 (
( ) ( 0.6667)24
( ) ( 0.32)
1) 16 ( )
D z
x ku k Kx k
x k
u k y k y k η k
y k y k u
U z zGY z z
ku k u k y k y k

Robotics Research Labo-ratory
16
2
2
( ) 0.02( 1) ( ) ex) open-loop system
( ) ( 1) ( )
( ) ( ) ( )
( ) ( ) ( ) ( ) ( )0.02( 1) ( )
closed-loop system( )( 1) 0.02( 1) ( )
wh
Y z z B zU z z A z
Y z α z B zR z α z A z β z B z
z α zα z z z β z
( )ere ( ) ( ) ( ) ( ) ( ) ( ) ( )
( )β zA z Y z B z U z B z R z Y zα z
Regulator Design by Pole Placement - polynomial equation approach

Robotics Research Labo-ratory
17
2
Desired closed-loop characteristic polynomial
( ) ( 0.6 0.4)( 0.6 0.4) 1.2 0.52
Desired minimum-drder observer polynomial ( )
To determine ( ) and ( ) systematically, we solve the fol
clA z z j z j z z
F z z
α z β z
3 2 3 20 1 2 3
2 3 2
lowing Diophantine equation.
( ) ( ) ( ) ( ) ( ) ( ) ( )
where ( ) 1.2 0.52
( )( 1) 0.02 ( )( 1) 1.2 0.52
clα z A z β z B z F z A z D z
D z d z d z d z d z z z
α z z β z z z z z

Robotics Research Labo-ratory
18
. . . . .
. .,
. . . . .. . . .
..
,.
( )
1
1
0 1
1 0 0 02 0 0 25 0 25 0 25 0 752 1 0 02 0 02 0 0 0 1
1 2 0 0 02 37 5 12 5 12 5 37 50 1 0 0 12 5 12 5 37 5 62 5
0 0 320 52 1
1 2 161 24
E E
D M E D
α z α z α z
. , ( )
( ) ( . )( ) ( . )
0 10 32 24 16
0 6672 0 2
43
β z z
β z
z
z β z
z
β
α

Robotics Research Labo-ratory
Pole Placement Design- More Realistic Assumptions
.
19
Poles and zeros between the plant and controller can be cancelled.
,
where and are the factors (stable modes) that can be canceled.
i) For unique factorization, and a
A A A B B BA B
A B
re chosen to be monic.
ii) and must have all their roots inside the unit disc.
( )( ) ( )( )
where , and
process pole controller zero
process zero con
A B
AR BS A A B R B B A S
R B R S A S T A T
troller pole

Robotics Research Labo-ratory
20
( )
( )( )
minimum-degree causal controller
deg deg for uniqueness
cl
cl
cl c o C o
cl c o
c
c
A AR BS A A B R B B A S
A B A R B S A B A
A A A B A A A
A R B S A A A
S A
Ru Tu Sy
B Ru A Tu A S
y

Robotics Research Labo-ratory
21
cA T Su u yB R R
Pulse transfer function (uc to y)
o o
c cl c o
o o
c o c c
B B t B B t By z BT BTu z A A A
t AA A B A A
( )( )
Remarks:
i) Causalitydeg R deg Tdeg R deg Sdeg A deg B
ii) Uniquenessdeg A > deg S, deg B > deg R
iii) The cancelled factors must correspond to stable modes.

Robotics Research Labo-ratory
22
For ( ) ( ) ( ) ( ), ( ) ( ) ( ) ( ) ( ) ( ), consider the open-loop zeros. (a zero in processor is a pole in controller)
where , ,
c
mm
m
m
m
m
m
m
A q y k B q u k R q u k T q u k S q y k
BBT B B B B B B R B RAR BS A
BBT BAR BS A
B BA
( )
after cancelation
before cancelation
Note
m mm
m m m
o mm
m o m
o o
o o
o m
o m
o m
T B B TAR BS B AR B S
B B B BB BB T BTA A AR BS AAR B S
A BBTA A AAR B S
A B AA B A
AR B S A A
T A
B
B
AR BS
A S
A
TR
B A
B
,: canceled stable process zeros observer poles , model poles o mB A A

Robotics Research Labo-ratory
23
Causality Solution
Since deg deg and deg deg
deg deg( ) deg
(1)
(2)
Since deg deg
deg deg deg de
deg deg deg
g deg
deg deg
eg e
eg
d
d
d
o
o
m
o m
o
o
m
m
m
R B A
AR BS B A A
S R B AAR A
A
R BS B A A
A
T A B
R T
A A B A
g deg
deg deg deg deg
deg deg deg deg deg deg deg de
deg deg (3g )m
o m
m m
m m
m
A B
A B A B
A BB
BA B
AAB B

Robotics Research Labo-ratory
24
Since deg deg
(4)
deg deg
deg deg deg deg deg
deg deg 1
deg 2deg deg deg 1
1
(5)o
o m
m
S A
R
S A
A A
SA A B A A
A B

Robotics Research Labo-ratory
25
ex) DC motor with cancellation of process zero
1 22
1 2
( )( ) , 1( 1)( )
The desired closed-loop system is assumed that
Then
(1 )( ) simple struct
(1
uremm
m
m
m
mm
K z bH z z bz z a
B B
B z b
B z
B KB
p pH z
A A z
B
p
zB
p z
1 2 )p pK

Robotics Research Labo-ratory
26
20 0 1 1 2
1 20 0 1
deg deg deg deg deg 0 2 1 2 1
deg deg deg 0deg deg 1 1
deg 0
deg deg deg 1
( 1)( ) ( ) , i.e., 11, ,
( ) ( ) ( ) 1
( ) 1
o m
o m
o m
o m
o o
R A A B A
R R BS AT A B
z z a r K s z s z p z p AR B S A Aa p p ar s sK K
zT z A z B
A A z
z
1
0 0 1
2
( ) (
(1
) ( ) ( 1 (
)
) 1)c
o
u k t u k s y k s y k b
t
k
p pK
u
z

Robotics Research Labo-ratory
27
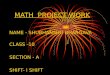
ζ ω rad0.7, 1 / sec
T T0.25 1.0
The process zero is canceled.- ripple between the sampling period

Robotics Research Labo-ratory
28
ex) DC motor with no cancellation of process zero
1 22
1
1
2
2
1
1 21
1( )
( )( ) , 1( 1)( )
The desired closed-loop system is ass
(1 )( )(1 )
um
1( )
ed that
1
1
( )(1 )
Hence (1 )
mm
m m
m
m
m
K z bH z z bz z a
BB p pH zA A z p z p
BB K z
B z bb
BB K z b
bp p p pB
K bz b
b
deg
The degree of the observer polynomia
2deg deg deg 1 1 )
is
(
l
o m oA A A B A z z

Robotics Research Labo-ratory
29
3 21 0 1 1 2
21 2
1 2
3 21
0
0 1 2
1
1
deg deg deg deg 1deg deg 1 1
The Diophantine equation can be written as
( -1)( - )( ) ( )( )
( )( 1)( )
(1 )( ) 1
( )( )
( )
m oR A A AS A
z z a z r K z b s z s z p z p z
b b p b pb
b b aK b p p
K a b a a p a p
r
s
a
s
s
z
s
T
1
0 0 1 1
20
1(1 )
The control law is th ( ) ( ) ( ) ( 1) (
en1)
o m
cu k t u k s
p pA B z t z
K
y k s k r
b
y u k

Robotics Research Labo-ratory
30
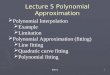
ζ ω rad0.7, 1 / sec
T T0.25 1.0
The process zero is not canceled.-smoother but a little slow response

Robotics Research Labo-ratory
31
Optimal DesignB q
x k u kA q
y k x kC q
v k e kA q
A q y k B q u k C q e k ARMAA A A
v
C C Ak
k
B B A
1
1
1
2
1 2 1 2 1 1
( )Process: ( ) ( )
( )output: ( ) ( )
( )noise: ( ) (
( ) (c
)( )
( ) ( ) ( ) ( ) ( ) ( ) ( )where , , e(
olored
)
noi
i
se)
s a sequence of inde
σ
J E y k
J E y k ρu k
2
2
2 2
with zero mean and variance of (white noise).Criteria
( ) minimum variance c
pendent or
ontrol
( ) ( ) linear quadra
uncorrelated random variable
t
ic control

Robotics Research Labo-ratory
32
Minimum Variance Control
* 1 * 1
* 1 * 1
( ) ( ) ( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( ) forward( ) ( )
( ) ( )( ) ( ) backward (1)( ) ( )
where deg deg ( ) deg
d
A q y k B q u k C q e k
B q C qy k u k e kA q A qB q C qq u k e kA q A q
d A B pole excessA
deg C n
- system with stable inverse

Robotics Research Labo-ratory
33
* 1 * 1
* 1 * 1
* 1 * 1* 1
* 1 * 1
* 1 * 1 * 1 * 1
* 1*
* 1
( ) ( )( ) ( ) ( ) (2)( ) ( )
( ) ( )( ) ( ) ( ) ( ) (3)( ) ( )
where ( ) ( ) ( ) ( )
( ) or ( )
d
C q B qy k d e k d u kA q A q
G q B qF q e k d e k u kA q A q
C q A q F q G q qC q FA q
* 11
* 1
1 21 1
1 1 11 1
1 20 1 1
1 1 10 1 1
( )( )( )
Note: ( )
( ) 1
( )
( )
d
d dd
dd
n nn
nn
G qq qA q
F q q f q f
F q f q f q
G q g q g q g
G q g g q g q

Robotics Research Labo-ratory
34
* *
* *
* * **
* *
222 *
* * *
* *(
Also, using ( ) ( )
(3) becomes
( ) ( ) ( ) ( )
( )
)
independent of ( ), (
(
( ) ( )
-1), , ( ), ( -1),
)
d
F e k d
A Be k y k q u kC C
G B Fy k d F e k d y k u kC C
E y k d E E
u
G B Fy k u kC C
y k y k u k u k
k
* 1
* 1 * 1
2 2 2 21 1
( ) ( )( ) ( )
( ) ( ) ( )
Notes: 1) ( ) 1
( )
2) minimum phase system plant zero must be stable. d
G q G qy k y kB q F q F q
E y k d f f
B q

Robotics Research Labo-ratory
35
3 2
3 2
2
ex) Minimum variance control
( ) 1.7 0.7
( ) 0.9
pole excess 2 ( ) 0.8
(
( ) 0.5
( 0
) 0.66 0.56(0.66 0.56) ( ) ( )
( 0.8))
.
5
A q q q q
C q q q
dF q q
G q q qqu k y k
q
B q q
q
2 2 2 2
( ) 1.3 ( 1) 0.4 ( 2) 0.6
Note: (1 (0.8)
6 ( ) 0.56
) 64
1)
1.
(u k u k u k y k y
E y σ
k
σ

Robotics Research Labo-ratory
36
References:
1. Discrete-time control systems, 2nd Ed., K. Ogata, Prentice-Hall,1995
2. Computer-controlled systems, 3rd Ed., K.J. Astrom, B. Wittenmark, Prentice-Hall, 1997