Embed Size (px)
Citation preview

Solving the SVM Problem
Christopher Sentelle, Ph.D. CandidateL-3 CyTerra Corporation

Introduction
SVM Background
Kernel Methods
Generalization and Structural Risk Minimization
Solving the SVM QP Problem
Active Set Method Research
Future Work

Introduced by Vapnik (1995)
Binary classifier
Foundation in statistical learning theory (Vapnik)
Excellent generalization performance
Easy to use
Avoids curse of dimensionality
Avoids over-training
Single global optima
Burges, C., “A Tutorial on Support Vector Machines for Pattern Recognition”
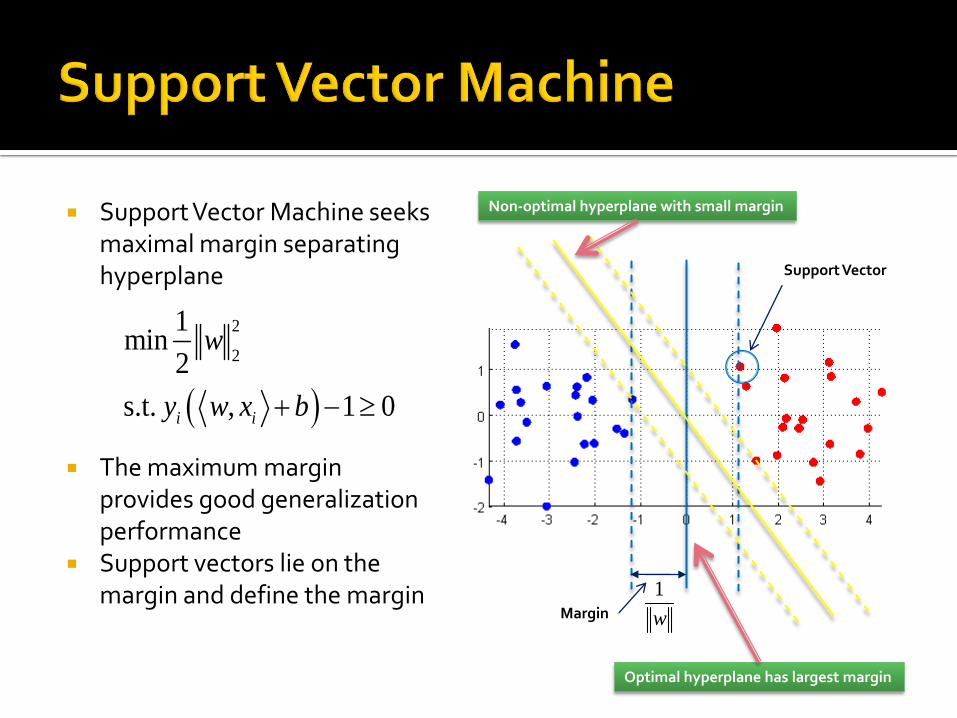
Support Vector Machine seeks maximal margin separating hyperplane
The maximum margin provides good generalization performance
Support vectors lie on the margin and define the margin
2
2
1min
2
s.t. , 1 0i i
w
y w x b
1
wMargin
Non-optimal hyperplane with small margin
Optimal hyperplane has largest margin
Support Vector

-3 -2 -1 0 1 2 3 4-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
In many cases, problem is not linearly separable
Soft-margin formulation introduces slack variables to allow some data points to cross margin
C is a tunable parameter
2
2
1min
2
s.t. , 1i i
i
i
i
w
y w x b
C
Penalty term
Slack variable

The SVM problem formulation can be recast to dual through method of Lagrange multipliers
1 1 1
1
1
1 , 1
1, , 1
2
0
0
1,
2
, ,N N N
i i i i i i i
i i i
N
i i i
i
N
i i
P
i
i i
i
N N
D i i j i j i j
i i j
L y x b u
Ly
w
Ly
b
L
b C
L
C u
y y xx
w w wα
w
w
x

Dual-formulation SVM Quadratic Programming Problem
Bound SVs, cross margin with non-zero slack ( )
Non-bound SVs, on margin
Non SVs ( )
,
1,
2
. .
m
0 , 0
ax i i j i j i j
i i j
i i i
i
y y x
s t C
x
y
Data points appear within dot product
Convex, Quadratic objective
Single equality constraintPenalty parameter, C, shows up in bound
constraints
1, 0i iy 1, 0i iy
1,0i i Cy 1,0i iy C
i C
C
0C0

Kernel methods can be applied to SVM dual formulation
Kernel represents dot-product formed in a non-linearly mapped space
Unnecessary to know or form mapping
,
m1
2
. . 0 , 0
ax ,i i j i j
i i j
i i
i j
i
i
y y k x
s t C y
x
, ,i j j jk x x x x
.

A chosen kernel function must satisfy Mercer’s Condition (Vapnik, 1995)
Common kernel functions:
2
A kernel function , satisfies Mercer's condition
if for all functions, , such that is finit
0
e
,
g x
K x y
g x
K x y g x g y dxd
dx
y
Polynomial
Gaussian RBF
Sigmoid
Linear
, 1d
k x y xy
2
22, e
x y
k x y
, ,k x y x y
, tanh ,k x y x y
**RBF kernel most commonly employed since it is numerically stable and can approximate a linear kernel.

A slightly different problem is solved for Support Vector Regression (SVR):
ν -SVC trades the parameter, C, in classification for a parameter, ν, that pre-specifies proportion of support vectors
2 2 2minimize
1 ˆ2 2
subject to ,
ˆ,
i i
i
i i i
i i i
Cw
w b
y
x y
w x b
21 1
2
subject to
minimi
0, 0
ze
,
i
i
i i i
i
wl
y x w b
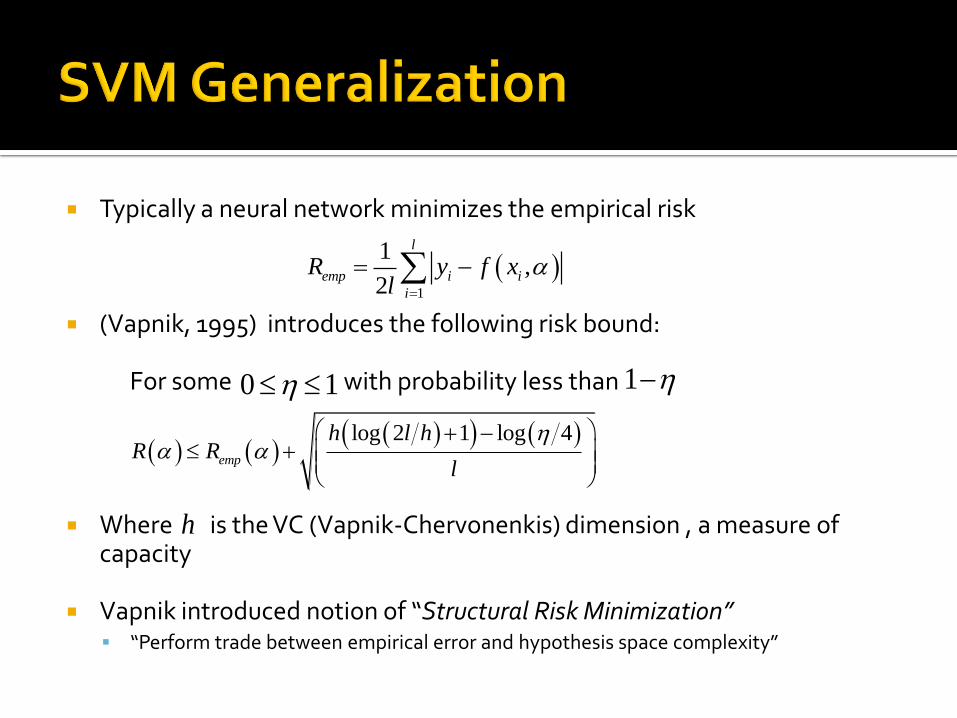
Typically a neural network minimizes the empirical risk
(Vapnik, 1995) introduces the following risk bound:
For some with probability less than
Where is the VC (Vapnik-Chervonenkis) dimension , a measure of capacity
Vapnik introduced notion of “Structural Risk Minimization” “Perform trade between empirical error and hypothesis space complexity”
1
1,
2
l
emp i i
i
fl
R y x
log 2 1 log 4
emp
hR
l
l hR
h
0 1 1

Capacity or VC-dimension is related to how many points can be arbitrarily labeled and correctly fit by a set of functions,
In this example, 3 data points are “shattered” by the line function (VC dimension is 3)
f
Example from Burges, C., “A Tutorial on Support Vector Machines for Pattern Recognition”

LIBSVM (SMO) Commercially available: http://www.csie.ntu.edu.tw/~cjlin/libsvm/
SVMLight (Decomposition w/ Interior Point) http://www.cs.cornell.edu/People/tj/svm_light/
SVMTorch (Decomposition for Large-Scale Regression) http://bengio.abracadoudou.com/SVMTorch.html
SVM-QP (Active Set method) https://projects.coin-or.org/OptiML
SVM dual formulation
Convex, quadratic, bound-constrained, single equality constraint
Problem is large
Q (kernel matrix) is dense, semi-definite, ill-conditioned
Equality constraint is considered “nuisance” for some algorithms
Ci
0 ,0 s.t.
min
αy
α1Qαα
T
TT
α
nn
jijiji xxKyy ,,Q
0αyT

Karush-Kuhn Tucker (KKT) conditions for optimality are necessary and sufficient, given convexity, for optimality
1, , , ) 1 ( ) ( 1 )
2
1 0
0
0
0
0
0
( )
(
0
T T T T TD
T
i
i
i
i i
i i
r Q y r C
Q
r
C
L
y r
y
C
r
Complementary conditions
Feasible region
Non-negativity constraints on KKT multipliersfor inequality constraints

Chunking
Decomposition
Active SetGeometricalConvex Hull
Interior Point(SVMLight)
Gradient Projection
Primal Methods
Cutting Plane(SVMPerf)
Interior Point
SMO
Gradient Projection
Stochastic Sub-gradient
PegasosSVM-QP
SVM-RSQP
SimpleSVM
DirectSVMVariable
Projection
Single Equality Constrained GP
Regularization Path Search
Max Violating Pair WSS
Quadratic info WSS
Maximum Gain WSS
Incremental/Decremental
Training
Low-Rank Kernel Approx
OOQP for Massive SVMs
*This represents only a sampling ofoptimization methods reported in the literature
VapnikIntroduces SVM

Decomposition method breaks problem down into sequence of fixed-size sub-problems
Variables are optimized while the set of variables remain fixed
Objective decreased at each iteration as long as KKT violators added to sub-problem and non-KKT violators switched out Proof of linear convergence (Keerthi, Lin, et al.)
min 2 1
. . y ,
1
2
0
w
T T Tww ww w wn n w w
T Tw w n n w
Q Q
s t y C
w n
Sub-problems can be solved with any appropriate QP-solver
(Joachims, 1998) introduces SVMLight Decomposition method, even number of points
Introduces LP problem for working set selection
Introduces shrinking
Solves sub-problem using interior point method (IPM), pr_LOQO
(Zanghirati et al., 2003) (Serafini et al., 2005) Uses a gradient projection method to solve sub-problem
Works with larger sub-problem sizes
Parallelizable implementation

SMO (Sequential Minimal Optimization, Platt 1999) takes decomposition to extreme by optimizing 2 data points at a time
Sub-problem has analytical solution
Optimal solution clipped to maintain feasibility
1 2
11 22 1
2 2 2 1 1
1
2 2
2
, y
2 ,
T T
i
j
i
N
j j j i
E Ey y
K K K yE bK y
1 0
2 0
2 0
2 C
2 C
1 0
1 C
1 C
1 2y y
1 2y y
(Platt, 1998) Sequential Minimal Optimization (SMO) Sub-problem contains 2 points -> analytical solutions
Computes high number of cheap iterations
(Keerthi, 2003) introduces dual-threshold method Improves on efficiency of Platt’s original implementation
(Fan et al. 2005) introduces an improved working set selection employing 2nd order (quadratic) information LIBSVM (Lin et al. 2001) is still a popular SMO implementation

Given an inequality constrained problem
Goal is to identify active constraints in solution, i.e. inequality constraints satisfied as equality constraints
Active set method incrementally identifies active constraints and solves corresponding equality constrained problem until all inequality constraints are satisfied
11
2
. .
mi
n T TQ
s t Ax b
Cx d

Equality constrained problem is solved given current set of active constraints
Violated inactive constraints identified and single inactiveconstraint converted to activeconstraint and problem resolved
[ ]
11
2
. .
min
,
T T
i i
Q
s t Ax b
C ix d
Activeset
The active set method exploresfaces of convex polytope formedfrom set of inequality constraints

Incremental nature allows use of efficient rank-one updates to factorizations used to solve equality-constrained problem
Ideal for medium-sized problems with few support vectors (sparse solution)
Memory still issue for large problems, can employ
Preconditioned Conjugate Gradient
Kernel Approximations
The active set method exploresfaces of convex polytope formedfrom set of inequality constraints

(Cauwenberghs, et al., 2000) Introduce an active set method for incremental/decremental training
Method is only applicable to positive definite kernels
(Vishwanathan et al., 2003) Introduce an active set method (SimpleSVM)
Initializes the method using the closest pair, opposite label, points
Mentions possibilities for, but does not handle the singular Kernel matrix case
(Shilton et al., 2005) Solve a min-max problem or primal-dual hybrid problem
Avoids working with the equality constraint

(Vogt et al., 2005) Does not address the case of a semi-definite or singular Kernel matrix
Suggests a gradient projection be used to speed-up active set method
(Scheinberg et al., 2005) Introduces efficiently implemented dual Active Set method
Handles semi-definite kernels
Shows competitive results against SVMLight
(Sentelle et al., 2009, in work) Introduces Revised Simplex, avoids singularities common to Active Set
methods

Based upon the penalty barrier method Replace inequality constraints with
penalty function
becomes
Optimality conditions become:
0 ln( )i ixx
1
2
. . Ax=b, x 0
min T T
xc x x Qx
s t
1
1
2
. . Ax
min ln
=b
NT T
jx
j
c x x Qx x
s t
1
1
1 2
11 2
1, )
2
( ) ln
( , ) 0
where ( , ,... )
( ,
0
( , ,. . )
0
. ,
T TD
NT
j
j
T
n
n
L x x
c Qx A e
Ax b
c x Qx
Ax b x
V
e
x s
V diag x x x
S diag s s s s
VSe
V e

Newton’s method employed to find solution to optimality conditions
Which for IPM, the Newton step becomes
In IPM, complementary conditions not maintained, met at solution
Ideal for dense Hessians and large problems
Kernel approximation methods proposed to allow method to deal with non-linear kernels
Polynomial convergence, theoretical worst case is O(n)
1
( )
( )
nn n
n
f xxx
f x
0 0
0
T T s Qx
e V
A b Axx
Q A I c
S
A
s eS V
, ,T n kQ L L D L k n

(Fine & Scheinberg, 2001) Implements a primal-dual interior point method (Mehrotra prediction-
corrector)
Problem solved at each iteration grows cubically with problem size
Employ Kernel approximation to reduce computations at each iteration
Employ Incomplete Cholesky factorization
(Ferris & Munson, 2003) Discuss application of IPM to large-scale SVM problems
(Gondzio & Woodsend, 2009) Show how use of separability allows scaling of IPM to large-scale
problems (outperforms all but LIBLinear on large problems)

Try to solve the primal problem instead of dual
Traditionally, dual admits easier use of kernel matrix
Dual solution not always “sparse”
Primal converges to approximate solution quicker (Chapelle, 2006)
21minimize
2
s.t. , 1 0
i
i
i i i
C
y b
w
w x
(Chapelle, 2006) SVM primal objective can be casted as
using Reproducing Kernel Hilbert Space,
Equating the gradient to zero and employing reproducing property
Similar to (Ratliff et al, 2007) for Kernel Conjugate Gradient method
i
ii byLC xww , min ,
2
2bw,
i
iiHHf
fyLf x,
2 min
i
T
ii
T yL βKKβββ
, min

(Joachims, 2006) introduces SVM-Perf Cutting planes method
Shows considerable improvement over decomposition methods for linear kernels
Convergence is
(Shalev-Shwartz et al., 2007) introduce Pegasos Employs stochastic gradient descent, sub-gradient, trust-region
Solves text classification problem (Reuters Corpus Volume 1) with 800,000 points < 5 sec!!!!
Linear kernels only
Convergence is
21O
1O

Works by projecting gradient onto convex set of constraints
Activates/deactivates more than one constraint per iteration
(Dai & Fletcher, 2006) introduce single-equality constrained Gradient Projection for SVM
gradient
projected gradient
x0
xdGxxx
gx
x
TT
o
q
tPx(t)
(t))q(
21
t
)(
, where
min

(Wright, 2008 NIPS conference) suggests application of primal-dual gradient projection to SVM problem
Consider saddle point (min-max) problem
where is convex for all and is concave for all
Projection steps are as follows:
xvlXxVv
,maxmin
xl , Xx ,vl Vv
11
1
,
,
kk
vk
k
V
k
kk
xk
k
X
k
xvlvPv
xvlxPx
(Zhu et al., 2008) “An efficient primal-dual hybrid gradient algorithm for total variation image restoration, ” Tech Report, UCLA
The SVM problem is convex in but is only non-strictly concave in (or non-strictly convex)
Looking at the projection step, we have
where is the projection onto the box constraints
Step lengths must be carefully chosen
αyαQααTTT
Cbb
1 minmax
21
10
α b
y1Qααα
αy
α
11
1
kk
k
kk
kT
k
kk
bP
bb
P iCi 0
kk ,

Can we further improve training algorithms for large datasets?
Popular SMO algorithm is a coordinate descent method
Care must be taken to ensure numerical stability
Data scaling affects convergence speed
Improper setting of C value and/or kernel parameters can prevent convergence
May be slow, overall, when compared to other methods
Other non-decomposition methods introduced in SVM community cannot handle large training set sizes
Our goal is to find non-decomposition techniques that can handle large training sets and are fast

Given the equality-constrained problem solved at each iteration, a direction of descent can be solved (for SVM)
In general, system of equation is indefinite, possibly singular
Several factors cause singularity
Kernel-type (linear kernel)
Subset of chosen non-bound support vectors
Singularities can occur for positive definite kernels!
dg
ch
y
yQT
s
sss
0
Positive semi-definite sub-matrix of original Kernel matrix containing non-bound SVs

(Rusin, 1971) Revised Simplex Introduces revised simplex for quadratic programming
Equality-constrained problem solved at each iteration guaranteed non-singular
Represents a form of inertia controlling method
(Sentelle et al., 2009) Adapt Revised Simplex to SVM Optimize method for SVM problem
Employ Cholesky factorization with rank-one updates (similar to Scheinberg 2006)
Show method can be viewed as a “fix” to existing active set methods which must contend with singularities

Conventional active set methods typically solve equality constrained problem of activeconstraints, directly
Solving for descent direction allows deletion of existing constraint before adding new constraint
Conventional active set method does not maintain complementary conditions during descent
Maintaining complementary conditions are key to guaranteeing non-singular equations
c
T
c
csc*
s
T
s
sss
αy
αQ1α
y
yQ
*0
*0
si
i
q
y
*ss s s s
Ts
Q αy α
y
0
1
0
s
g
ss s s
Ts
sc c ss s s
Q y h
y
Q α Q α y
00
is
T
s
sss eh
y
yQ
g

Indefinite, non-singular matrix admits use of NULL-space method for solution
Given the system
Define NULL space as
System of equations becomes
Solving for
A Cholesky factorization is maintained
Null space has an analytical solution
Efficient rank-one updates made to Cholesky factorization without typical QR factorizations
0, Ts z yZy h Zh Yh
ss z ss y s
Ts y
Zh Q Yh y g u
y Yh v
Q
0
ss s
Ts
Q y h u
g vy
( )T Tss z yZh Z u Q hZ Q Y
zh
T TssQ Z R RZ
1 2 1... ny yy yZ
I

• Adult-a has 32,000 data points• Cover Type has 100,000 data points• 10-2 stopping criterion

Improved speed and memory consumption alternatives still being investigated
Gradient project steps can be inserted to move multiple constraints per iteration
Conjugate gradient can be applied to reduce memory consumption
Problem becomes increasingly ill-conditioned as progress made towards solution
Care must be taken to ensure conditions of non-singularity maintained despite accuracy of conjugate gradient solution

(Vapnik, 2009) has introduced Learning Using Privileged Information (SVM+)
Makes use of additional information available during training to speed up converge
Examples of privileged information Future stock prices
Radiographer notations in tumor classification task
Additional annotations made in handwriting recognition task
Our method can be applied to this formulation

Questions?