Embed Size (px)
Citation preview

UPM
DFAII
ETSII, UPM
Resumen
Contenido
Pagina Inicial
JJ II
J I
Volver
Cerrar
Salir
Cinematica de los sistemasindeformables
MεcFunNεt

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 2 de 41
Contenido
1 Movimiento plano como caso particular de la cinematicade un sistema indeformable 3
2 Base y ruleta 7
3 Movimiento de una base de Frenet 12
4 Geometrıa de base y ruleta 15
5 Movimiento de tres planos 17
6 Campos de velocidades y aceleraciones 18
7 Circunferencias de las inflexiones y de las inversiones 21
8 Perfiles conjugados 24
9 Formula de Euler-Savary 27
10 Teorema de Rutz 33
11 Cinemas 36

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 3 de 41
1. Movimiento plano como caso particular
de la cinematica de un sistema indeformable
Un caso particular del movimiento general del solido rıgido es aquel en elque todos los puntos siguen trayectorias paralelas a un plano fijo. La mayorparte de los mecanismos utilizados en la tecnica obedecen a la cinematicaplana.
En esta seccion se deducen las particularidades que un movimiento planoinduce en la cinematica de un sistema indeformable. Se parte de la defini-cion y se revisan las propiedades mas importantes. Se supone que existe unsistema al que el contexto marca como fijo y al que se refieren los conceptosde velocidades o derivadas temporales de vectores.
Se dice que un sistema indeformable S tiene un movimiento plano enun intervalo temporal (t0, t1) cuando existe un plano fijo π1, llamado planodirector tal que las trayectorias que durante el intervalo (t0, t1) describentodos los puntos de S son paralelas al plano π1.
Una primera consecuencia del movimiento plano es que la rotacion −→ωes perpendicular al plano director. En efecto,
Si existe un plano fijo π1 direccionado por un vector −→u y tres puntos noalineados A,B,C del sistema movil S cuyas velocidades son paralelas a π1
y situados de forma que el plano ABC no sea perpendicular a π1, entoncesel sistema tiene movimiento plano y su plano director es π1.
Para la demostracion de esta propiedad, se parte de la hipotesis
−→v A · −→u = −→v B · −→u = −→v C · −→u = 0

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 4 de 41
Por otra parte, el campo de velocidades determina las relaciones −→v B = −→v A +−→ω ×−→AB−→v C = −→v A +−→ω ×−→AC
multiplicando escalarmente por −→u , se tiene −→v B · −→u = −→v A · −→u + (−→ω ,−→AB,−→u ) ⇒ −→ω · (−→AB ×−→u ) = 0−→v C · −→u = −→v A · −→u + (−→ω ,−→AC,−→u ) ⇒ −→ω · (−→AC ×−→u )
con lo que la rotacion−→ω es perpendicular a dos vectores (−→AB×−→u ,−→AC×−→u )
linealmente independientes y paralelos al plano π1, lo que implica que −→ωes normal al plano π1. Entonces, la velocidad de cualquier otro punto Pdel sistema
−→v P = −→v A +−→ω ×−→AP
al ser multiplcada escalarmente por −→u , es
−→v P · −→u = −→v A · −→u + (−→ω ,−→AP,−→u )
se anula. Por lo tanto, las velocidades de todos los puntos de S son paralelasa π1, como se querıa demostrar.
Ademas, en la demostracion se ha revelado una importante propiedad:en un movimiento plano, el vector rotacion es perpendicular al plano di-rector.
En un movimiento plano, el segundo invariante del grupo cinematico (elproducto escalar de la velocidad de cualquier punto por el vector rotacion)

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 5 de 41
es nulo, lo que implica la existencia (cuando la rotacion no se anule), deun eje de puntos cuya velocidad es nula (eje instantaneo de rotacion) queperpendicular al plano director. Por lo tanto, los axoides son superfi-cies cilındricas de generatrices normales al plano director, que permanecensiempre tangentes a lo largo de una generatriz sobre la que se produce unmovimiento de rodadura pura.
Por otra parte, las velocidades de todos los puntos situados en unaperpendicular al plano director son iguales y sus trayectorias, por lo tanto,son paralelas. Esto sugiere el estudio del movimiento de solo los puntosde estas rectas situados sobre el plano director. Los puntos de S queevolucionan sobre π1 constituyen el plano movil π. La cinematica planapuede entonces reducirse al estudio de la evolucion de un plano movil π quese mueve sobre un plano fijo π1. El punto del eje instantaneo de rotacionsituado sobre π recibe el nombre de centro instantaneo de rotacion (CIR).Este puede definirse como el punto del plano movil cuya velocidad respectoal fijo es nula. Lo denotaremos por Im(t), dinde el subındice recuerdaque se trata de un punto del plano movil y reteniendo la dependenciatemporal para subrayar el hecho de que un punto del sistema movil es CIRen un instante dejando de serlo justo despues de ese instante, cuando otropuntodel plano movil recoja el tıtulo de centro instantaneo de rotacion.
La interseccion del axoide fijo con π1 recibe el nombre de base o polarfija.La interseccion del axoide movil con π recibe el nombre de ruleta o polarmovil. En el transcurso del movimiento plano, la ruleta rueda sin deslizarsobre la base. Puede redefinirse la ruleta como el lugar geometrico de lospuntos del plano movil que en algun momento hayan sido o vayan a sercentros instantaneos de rotacion. Igulmente puede redefinirse la base como

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 6 de 41
el lugar geometrico de puntos del plano fijo sobre los que se encuentren enalgun momento el centro instantaneo de rotacion de ese momento.
El punto que sin ser solidario al sistema fijo ni al sistema movil se muevede forma que su posicion en cada instante sea la del centro instantaneoderotacion de ese instante, se llama seguidor de polos. Se notara como I. Elseguidor de polos se situa en cada instante sobre el CIR de ese instante.De este modo, se puede dar una definicion equivalente de la base y ruletacomo las trayectorias del seguidor de polos en respecto a los planos fijo ymovil respectivamente.
Si se escribe la formula del campo de velocidades del plano movil toman-do como punto de referencia el CIR, se tiene
−→v P = −→ω ×−→IP
lo que determina la propiedad fundamental del CIR que establece que lasnormales a las trayectorias de todos los puntos de π se cortan en el centroinstantaneo de rotacion.

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 7 de 41
2. Base y ruleta
Para determinar la posicion del CIR, se debe partir de la definicion delmovimiento plano que lo genera. Un movimiento plano puede definirse dela siguiente forma. Sean dos bases de referencia O1x1y1, Oxyz situadassobre los planos fijo y movil respectivamente, de forma que
−→i × −→j =−→
i 1×−→j 1 =
−→k . Sean asımismo ξ, η las coordenadas del origen O de labase
movil en la base fija y sea ϕ el angulo azimut del primer eje movil respectoal primer eje fijo orientado por el tercer eje
−→k . Cada terna de valores
ξ, η, ϕ, determina una posicion de la base movil respecto a la fija y, por lotanto, la de todos los puntos del plano movil. Las funciones del tiempoξ(t), η(t), ϕ(t) determinan el movimiento plano. Si se prescinde de t, porejemplo conociendo las funciones ξ(ϕ), η(ϕ), se define una secuencia deposiciones del plano movil respecto al fijo, prescindiendo de la velocidad a

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 8 de 41
la que se suceden.
En primer lugar, se va a identificar −→ω = ϕ−→k . En efecto, en un
movimiento plano (vease la seccion anterior), la rotacion es perpendicu-
lar al plano y puede escribirse −→ω = ω−→k . Ademas, se sabe que la derivada
temporal de cualquier vector del sistema movil es el resultado de premul-tiplicarlo vectorialmente por el vector rotacion. En particular
d−→i
dt= ω−→k ×−→i = ω
−→j
Por otra parte, por la definicion de ϕ, se tiene
−→i = cosϕ
−→i 1 + sinϕ
−→j 1
derivandod−→i
dt= (− sinϕϕ
−→i 1 + cosϕϕ
−→j 1) = ϕ
−→j
por lo que, identificando, se obtiene ω = ϕ.
Para hallar la posicion del CIR, se parte de su propiedad definitoria (lanulidad de su velocidad).
−→0 = −→v O +−→ω ×−−−−→OIm(t)
por lo que
−−→v O = ϕ−→k ×−−−−→OIm(t)
postmultiplicando por−→k
−−→v O ×−→k = ϕ(
−→k ×−−−−→OIm(t))×−→k

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 9 de 41
desarrollando el doble producto vectorial, se tiene,
−−→v O ×−→k = ϕ
−−−−→OIm(t)− (
−−−−→OIm(t) · −→k )
−→k
pero, como los puntos O e Im(t) estan en π, el vector−−−−→OIm(t) es perpen-
dicular a−→k con lo que
−−→v O ×−→k = ϕ
−−−−→OIm(t)
y, si ϕ no es nulo (si fuese nulo, todos los puntos del solido tendrıan la mismavelocidad, es decir, se tendrıa un movimiento instantameo de translacion,no estando definido el CIR)
−−−−→OIm(t) = −
−→v O ×−→k
ϕ= −(ξ
−→i 1 + η
−→j 1)×−→kϕ
−−−−→OIm(t) =
−η−→i 1 + ξ−→j 1
ϕ
con lo que
−−−−−→O1Im(t) =
−−→O1O +
−−−−→OIm(t) =
(ξ − η
ϕ
)−→i 1 +
(η + ξϕ
)−→j 1
que, en parametricas es x1(t) = ξ − η
ϕ
y1(t) = η +ξ
ϕ

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 10 de 41
ecuaciones parametrico temporales de las coordenadas del seguidor de polosI en la base fija, ası como de la base.
Posicionando el CIR respecto a la base movil se obtiene la ruleta.
−−−−→OIm(t) =
−η−→i 1 + ξ−→j 1
ϕ
teniendo en cuenta que −→i 1 = cosϕ
−→i − sinϕ
−→j
−→j 1 = sinϕ
−→i + cosϕ
−→j
se tiene
−−−−→OIm(t) =
ξ sinϕ− η sinϕ
ϕ−→i +
ξ cosϕ+ η sinϕ
ϕ−→j
con lo que las ecuacionesx(t) =
ξ sinϕ− η sinϕ
ϕ
y(t) =ξ cosϕ+ η sinϕ
ϕ
ecuaciones parametrico temporales de las coordenadas del seguidor de polosI en la base movil, ası como de la ruleta.
Si en vez de tener el movimiento plano totalmente determinado en eltiempo, se tiene la secuencia de posiciones sin la velocidad de su recorrido,

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 11 de 41
entonces tambien se pueden obtener ecuaciones parametricas de las coor-denadas del seguidor de polos y, la base y la ruleta. Teniendo en cuentaque
d
dt= ϕ
d
dϕ
se tiene las ecuaciones parametrico angulares de base y ruletax1(ϕ) = ξ − η′y1(ϕ) = η + ξ′
x(ϕ) = ξ′ sinϕ− η′ sinϕy(ϕ) = ξ′ cosϕ+ η′ sinϕ
donde la derivacion respecto a ϕ se denota con el sımbolo ′. Queda estable-cido que la base y la ruleta quedan definidas por la secuencia de posicionesdel plano movil sobre el fijo, sn que sea necesario saber en que instantetiene lugar cada una de ellas.

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 12 de 41
3. Movimiento de una base de Frenet
En esta seccion se considera el caso particular del movimiento de la basede Frenet F de una curva plana Γ.
Se supone se ha definido una abscisa curvilınea ` sobre Γ y que la base deFrenet esta compuesta por los vectores
−→t ,−→n ,−→b de forma que la velocidad
del origen de la base es
−→v O =d`
dt−→t
El vector de Darboux representa la rotacion de una base de Frenet de unacurva referida al arco recorrido. Para obtener la rotacion referida al tiempotranscurrido, se parte de las formulas de Frenet, expresadas segun el vector

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 13 de 41
de Darboux−→Ω =
−→t
τ+
−→b
ρ
donde τ, ρ son los radios de curvatura de torsion y flexion respectivamente.Para una curva plana , se tiene
−→Ω =
−→b
ρ
y las ecuaciones de Frenet se obtienen, sustituyendo −→e por−→t ,−→n ,−→b en
la ecuaciond−→ed`
=−→Ω ×−→e
con lo que sus derivadas respecto al tiempo son
d−→edt
=d`
dt
d−→ed`
=d`
dt
−→Ω ×−→e
de lo que se deduce que la rotacion cinematica de la base F es
−→ω =d`
dt
−→Ω =
d`
dt
−→b
ρ
El centro instantaneo de rotacion esta situado respecto al puntoO mediantela ecuacion
−→OI =
−→ω ×−→v O
|−→ω |2=
d`
dt
−→b
ρ× d`
dt−→t(
d`
dt
1
ρ
)2 = ρ−→n

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 14 de 41
es decir,
El centro instantaneo de rotacion de una base de Frenet que se muevesobre una curva es el centro de curvatura de flexion de esta ultima.
Consecuencia inmediata de esta propiedad es que la ruleta del movimien-to de la base de Frenet de una curva es su propia recta normal, mientrasque la base es el lugar geometrico de los centros de curvatura. La curvapuede entonces generarse haciendo rodar sin deslizar una recta sobre ellugar geometrico de los centros de curvatura. Cuando una curva se originade esta forma, se dice que es la evolvente de la curva base, llamada evoluta.Por lo tanto,
La evoluta de una curva es la envolvente de sus rectas normales.

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 15 de 41
4. Geometrıa de base y ruleta
En esta seccion se van a relacionar la velocidad de sucesion de polos, larotacion y las curvaturas de base y ruleta.
Como estas dos curvas siempre permanecen tangentes, se puede definiruna base de referencia que se mueva solidariamente a una base de Frenetde las dos curvas. La rotacion de esta base F respecto a la base, es, segunse ha visto en la seccion anterior,
−→ω F/π1 =
−→b 1
ρ1
d`
dt
y respecto a la ruleta,
−→ω F/π =
−→b
ρ
d`
dt
donde−→b 1,−→b son los vectores binormales de base y ruleta y ρ1, ρ sus radios
de curvatura de flexion. Restando, se obtiene la rotacion del plano movilrespecto al fijo
−→ω = −→ω F/π1 −−→ω F/π =
−→b 1
ρ1
d`
dt−−→b
ρ
d`
dt
que, teniendo en cuenta que−→b 1 =
−→t ×−→n 1
−→b =
−→t ×−→n
se escribe−→ω = −
(−→n 1
ρ1
−−→nρ
)× d`
dt−→t

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 16 de 41
o bien, en funcion de la velocidad del seguidor de polos
−→ω = −→v I ×(−→n 1
ρ1
−−→nρ
)

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 17 de 41
5. Movimiento de tres planos
Sean π1, π2, π3 tres planos paralelos que evolucionan definiendo los movimien-tos planos relativos: π2/π1, π1/π2, π3/π1, π3/π2, π2/π3 Como ya se ha de-mostrado, la posicion geometrica de los centros instantaneos de los movimien-tos πi/πj, πj/πi es la misma, con lo que se tiene tres posiciones geometricasunicamente.
Se procede a calcular la velocidad respecto a π1 del centro instantaneode rotacion del movimiento de π3/π2. Por una parte, al tratearse de unpunto del plano π3 se tiene
−→v = −→ω 31 ×−−−→I31I23
por otra parte, se puede calcular su velocidad a partir de los campos de ve-locidades de π2/π1, π3/π2 utilizando las formulas de la cinematica relativa.
−→v = −→ω 21 ×−−−→I21I32 +−→v a(π3, π2, I32)
donde el ultimo sumando es nulo por ser la velocidad del centro instantaneode rotacion del movimiento π3/π2 respecto a π2. Queda, por lo tanto, que
−→ω 21 ×−−−→I21I32 = −→ω 31 ×
−−−→I31I23
es decir, la velocidad del CIR32 de un movimiento plano respectoa cualquierotro sistema puede calcularse como si perteneciera al plano π3 o al planoπ2 .
Ademas, la ecuacion anterior indica que−−−→I21I32 y
−−−→I31I32 son paralelos, lo
que permite enunciar el teorema de los tres centrosLos centros instanteneos de rotacion de los movimientos relativos de tres
planos que evolucionan sobre el mismo plano geometrico estan alineados.

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 18 de 41
6. Campos de velocidades y aceleraciones
En un movimiento plano, dada la nulidad de la velocidad del CIR, se tiene
−→v P = −→ω ×−→IP
lo que corresponde a una rotacion instantanea en torno al CIR (lo quejustifica su denominacion), es decir, las velocidades de todos los puntosresultan ser
• proporcionales a la distancia al CIR
• perpendiculares a la recta que una el punto con el CIR
Debe entenderse que aunque en un instante dado, t1 las velocidades de to-dos los puntos del sistema movil obedezcan a la misma ley que los de un sis-tema con rotacion permanente −→ω (t1) en torno a Im(t1), no se debe abusarde la analogıa, que no se cumple para las aceleraciones ni se mantiene enotro instante t2 en el que existira otro centro instantaneo Im(t2) y otrarotacion −→ω (t2).
El campo de aceleraciones se puede obtener por derivacion del campode velocidades, expresando el vector
−→IP por la suma
−−→O1P −
−→O1I.
−→a P =d−→ωdt× (−−→O1P −
−→O1I) +−→ω × (
dO1P
dt− dO1I
dt)
el terminodO1P
dtes la velocidad de P , es decir −→v P = −→ω ×−→IP . El termino
dO1I
dtes la velocidad del seguidor de polos , que se conoce como velocidad

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 19 de 41
de sucesion de polos y que se denota como−→v I . La velocidad del seguidor depolos I es la misma respecto a los sistemas fijo y movil, ya que obviamentela velocidad de arrastre del plano movil respecto al fijo en I es siemprenula.
El campo de aceleraciones queda
−→a P = −−→ω ×−→v I + −→ω ×−→IP +−→ω × (−→ω ×−→IP )
o bien, desarrollando el doble producto vectorial y teniendo en cuenta que−→ω · −→IP = 0, se tiene
−→a P = −−→ω ×−→v I + −→ω ×−→IP − ω2−→IP
Si se aplica esta ecuacion para calcular la aceleracion del centro instantaneode rotacion, solo queda el primer termino−→a I = −−→ω ×−→v I . Este representala aceleracion en el instante t del punto del plano movil cuya velocidad esnula en t y no debe confundirse con la aceleracion del seguidor de polos −→v I .La similitud con el caso de una rotacion permanente en torno a Im(t) esmas debil que en el caso de las velocidades. En efecto, la expresion anteriores la de un sistema plano que rotase permanentemente en torno a Im(t)con velocidad angular −→ω (t) y aceleracion angular −→ω mas una aceleracionconstante para todo el sistema de valor −→a I = −−→ω ×−→v I .
Una primera aplicacion del campo de aceleraciones es la localizacion delpunto Γ (si existe) de aceleracion nula.
(−→ω ×−→v I)×−→k = ω−→v I = ω
−→IΓ− ω2−→IΓ×−→k

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 20 de 41
que junto con la ecuacion
−→ω ×−→v I = ω−→k ×−→IΓ− ω2−→IΓ
permite obtener, tras multiplicar la primera por ω y la segunda por ω2 yrestar
ωω−→v I − ω3−→k ×−→v I = (ω2 + ω4)−→IΓ
lo que determina
−→IΓ =
ωω−→v I − ω3−→k ×−→v I
ω2 + ω4
que existe siempre que ω, ω no sean simultaneamente nulas, cuando laaceleracion de todos los puntos es la misma.

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 21 de 41
7. Circunferencias de las inflexiones y de las
inversiones
Una segunda aplicacion de los campos de velocidades y aceleraciones esla determinacion de los lugares geometricos de los puntos cuyas veloci-dades y aceleraciones sean paralelas (circunferencia de las inflexiones) operpendiculares (circunferencia de las inversiones) es decir, de los puntoscuyas trayectorias presentan un punto de inflexion o un punto de velocidadestacionaria.
La circunferencia de las inflexiones se determina mediante la ecuacion
−→v ×−→a = (−→ω ×−→IP )× (−→a I − ω2−→IP ) =−→0
es decir
(−→ω ×−→IP )× (−→a I − ω2−→IP ) = (−→IP ,−→ω ,−→v I)−→ω + ω2 nor(
−→IP )−→ω = 0
Es decir
nor(−→IP )−
−→a I
ω2· −→IP = 0 ⇒ nor(
−→IP −
−→a I
2ω2) = nor(
−→a I
2ω2)
ecuacion de una circunferencia de centro Cf posicionado desde I por laexpresion
−→ICf =
−→a I
2ω2
y radio
√nor(−→a I
2ω2) que se conoce como circunferencia de las inflexiones.
La expresion obtenida para esta circunferencia degenera en el caso en que

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 22 de 41
la rotacion sea nula, cuando no existe CIR ya que todos los puntos tienenla misma velocidad. En estas circunstancias el lugar geometrico de puntoscon velocidad paralela a la aceleracion es una recta normal a la velocidadde translacion que pasa por el polo de aceleraciones Γ. En caso de ser,ademas, ω nula, todos los puntos tienen la misma velocidad y la mismaaceleracion.
El segundo lugar geometrico buscado es el de puntos cuyas velocidadesy aceleraciones son perpendiculares, es decir
−→v P · −→a P = 0 ⇒ (−→ω ×−→IP ) · (−−→ω ×−→v I + ω−→k ×−→IP ) = 0
que se escribe−ω2−→v I ·
−→IP + ωω nor(
−→IP ) = 0
es decir
nor(−→IP − ω−→v I
2ω· −→IP ) = nor(
ω−→v I
2ω)
circunferencia de centro Ci posicionado desde I por el vector
−→ICi =
ω−→v I
2ω
y radio √nor(
ω−→v I
2ω)
llamada circunferencia de las inversiones. La expresion obtenida para estacircunferencia degenera en el caso en que la rotacion sea nula, cuando noexiste CIR ya que todos los puntos tienen la misma velocidad. En estas

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 23 de 41
circunstancias, el lugar geometrico de puntos con velocidad perpendiculara la aceleracion es una recta paralela a la velocidad de translacion que pasapor el polo de aceleraciones Γ. En caso de ser, ademas, ω nula, todos lospuntos tienen la misma velocidad y la misma aceleracion. Si es nula ω perono lo es ω, entonces sı existe el centro instantaneo de rotacion y el lugargeometrico es una recta paralela a su aceleracion y que pasa por Im.

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 24 de 41
8. Perfiles conjugados
Cuando en un movimiento plano dos curvas, una movil y una fija per-manecen siempre tangentes entre sı, se dice que forman una pareja deperfiles conjugados. El punto que sigue al de tangencia se llama puntocaracterıstico de la pareja de perfiles conjugados. En el movimiento delperfil conjugado movil, este define una familia de posiciones en el planofijo, sus huellas. El perfil conjugado fijo es tangente a todas ellas, por loque se puede determinar como la envolvente de la familia de psiciones queel perfil conjugado movil determina sobre el plano fijo.
Esta propiedad permite la determinacion del perfil conjugado fijo dado elmovil. En efecto, sea
f(x, y) = 0

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 25 de 41
la ecuacion del movil y sean ξ, η, ϕ las coordenadas que posicionan el planomovil respecto al fijo. La ecuacion de la posicion que la curva movil defineen el plano fijo es
f((x1 − ξ) cosϕ+ (y1 − η) sinϕ,−(x1 − ξ) sinϕ+ (y1 − η) cosϕ)) = 0
si se tiene la informacion ξ(t), η(t)ϕ(t), entonces la ecuacion
f((x1−ξ(t)) cosϕ(t)+(y1−η(t)) sinϕ(t),−(x1−ξ(t)) sinϕ(t)+(y1−η(t)) cosϕ(t))) = 0
define una familia de curvas h(x1, y1, t) = 0 dependientes del parametro t.Para hallar la envolvente, se considera el sistema
h(x1, y1, t) = 0∂h
∂t= 0
que determina las funciones x1 = x1(t)y1 = y1(t)
que posicionan el punto caracterıstico en funcion del tiempo.Si solo se conocen las funciones ξ(ϕ), η(ϕ) entonces la familia de curvas
f((x1−ξ(ϕ)) cosϕ+(y1−η(ϕ)) sinϕ,−(x1−ξ(ϕ)) sinϕ+(y1−η(ϕ)) cosϕ)) = g(x1, y1, ϕ) = 0
determina una envolvente que viene definida por el sistema g(x1, y1, ϕ) = 0∂h
∂ϕ= 0

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 26 de 41
del que se obtiene x1 = x1(ϕ)y1 = y1(ϕ)
las coordenadas del punto caracterıstico en funcion de ϕ. El perfil conjuga-do fijo, se puede obtener conocido el movil y la secuencia de posiciones delplano movil respecto al fijo, sin ser necesario el conocimiento del instanteen que tienen lugar.
La misma tecnica sirve para obtener el perfil conjugado movil conocidoel fijo, de ecuacion
f(x1, y1) = 0
La familia de curvas definidas en el plano movil es
f(ξ + x cosϕ− y sinϕ, η + x sinϕ+ y cosϕ) = 0
y su envolvente se determina derivando respecto al parametro t o ϕ comoen el caso anterior.
El movimiento del perfil conjugado movil sobre el fijo es una rodadura(−→ω ) mas un deslizamiento (la velocidad del punto del perfil movil que seapoya sobre el perfil fijo). La velocidad de deslizamiento es
−→v D = −→ω ×−→IP
que debe ser paralela a la tangente comun a ambos perfiles, por lo que−→IP
es normal a la pareja, lo que determina la propiedad fundamental de losperfiles conjugados: El centro instantaneo de rotacion se encuentra sobrelas normales a las parejas de perfiles conjugados.

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 27 de 41
9. Formula de Euler-Savary
Sea un movimiento plano en el que existe una base y una ruleta que verifica,como se ha deducido en la seccion anterior
−→ω = −→v I ×(−→n 1
ρ1
−−→nρ
)o bien,
−→ω = −→v I ×
( −→IA
|−→AI|2−−→IB
|−→BI|2
)donde A,B son los centros de curvatura de base y ruleta.
Se define una referencia I−→τ 3,−→ν 3 en la base de Frenet de las polaresfija y movil.

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 28 de 41
Se considera ahora una pareja de perfiles conjugados Γ1,Γ, y la basede Frenet comun que definen P−→τ 4,−→ν 4. Como ya se sabe, el CIR delmovimiento de este plano π4 respecto al plano fijo π1 es el centro de cur-vatura de Γ1, C. El CIR de π4 respecto al plano movil π es el centro decurvatura de Γ, D. Se va a calcular la velocidad de sucesion de polos −→v I
a traves del plano π4. Como I siempre se encuentra sobre ν4, su velocidadrelativa a π4 es paralela a ν4. Por otra parte, la velocidad de arrastre deπ4 respecto a π1 en I es
−→v a(π4, π1, I) = −→ω 41 ×−→CI
por lo tanto
−→ν 4×(−→v I×−→ν 4) = −→ω 41×−→CI ⇒ −→
CI×(−→ν 4×(−→v I×−→ν 4)) =−→CI×(−→ω 41×
−→CI)
que resulta en
|−→CI|2−→ω 41 =−→CI × (−→ν 4 × (−→v I ×−→ν 4)) =
−→CI ×−→v I
que permite despejar −→ω 41
−→ω 41 =
−→CI ×−→v I
|−→CI|2
considerando el movimiento respecto a π se llega al resultado similar
−→ω 42 =
−→DI ×−→v I
|−→DI|2

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 29 de 41
con lo que
−→ω = −→ω 41 −−→ω 42 =
( −→CI
|−→CI|2−−→DI
|−→DI|2
)×−→v I = −→v I ×
( −→IC
|−→CI|2−−→ID
|−→DI|2
)Esta expresion es la formula que relaciona la valocidad de sucesion de
polos con la rotacion y las curvaturas de los perfiles conjugados fijo y movil,y es una generalizacion de la que ya se dedujo para base y ruleta. Recibeel nombre de formula de Hartmann y corresponde a la expresion
−→ω = −→v I ×
( −→IC
|−→CI|2−−→ID
|−→DI|2
)Por lo tanto, si C,D,E, F son los centros de curvatura de dos parejas deperfiles conjugados del mismo movimiento plano, se verifica
−→v I ×
( −→IC
|−→CI|2−−→ID
|−→DI|2
)= −→v I ×
( −→IE
|−→EI|2−−→IF
|−→FI|2
)que en el caso de elegir como pareja de perfiles conjugados la base y laruleta del movimiento, contando con la ecuacion inicial, se tiene
−→v I ×
( −→IA
|−→AI|2−−→IB
|−→BI|2
)= −→v I ×
( −→IC
|−→CI|2−−→ID
|−→DI|2
)que se conoce como ecuacion de Euler-Savary. Realmente es una unicaecuacion, pues todos los sumandos que intervienen en ella tienen la direc-cion perpendicular al plano. En algunas ocasiones es conveniente proyectaresta ecuacion sobre el eje z y tomar las siguientes cantidades

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 30 de 41
• −→v I = vI−→τ 3
• −→IA = Rb−→ν 3
• −→IB = Rr−→ν 3
• −→IC = (r +Rf )−→ν 4
• −→ID = (r +Rm)−→ν 4
• sinϕ = −→ν 3 · −→ν 4
con lo que sustituyendo y proyectando sobre−→k queda
1
Rb
− 1
Rr
=
(1
r +Rf
− 1
r +Rm
)sinϕ
Cuando se considera que el perfil conjugado movil se reduce a una cur-cunferencia cuyo radio tiende a cero (el perfil tiende a un punto P ), el perfilconjugado fijo es su trayectoria, cuyo radio de curvatura se determina ha-ciendo Rm = 0 en la formula anterior.
Por otra parte parte, dado que, como ya se ha especificado, la compo-nente de la velocidad de sucesion de polos tangencial a los perfiles es lavelocidad de arrastre del plano π4 respecto a π1 en I, sigue las leyes delcampo de velocidades y, por lo tanto, dado que P, I se encuentran alin-eados con el centro instantaneo I41, se tiene que la velocidad de P y lacomponente segun su direccion de la −→v I son las de dos puntos del sistemaπ4 que rotan en torno a I41 y por lo tanto
• paralelas

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 31 de 41
• directamente proporcionales a sus distancias al I41.
En particular, si el perfil conjugado movil tiende a un punto, este se iden-tifica con P e I41 es el centro de curvatura de su trayectoria. Por lo tanto,dada la velocidad de un punto y el centro de curvatura de su trayectoria,se puede determinar la componente paralela a la velocidad anterior de lavelocidad de sucesion de polos.
Por consguiente, dadas las velocidades de dos puntos y los centros decurvatura de sus trayectorias, queda determinada la velocidad de sucesionde polos. Este metodo recibe el nombre de metodo de Hartmann.

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 32 de 41

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 33 de 41
10. Teorema de Rutz
En esta seccion se presenta un teorema que permite generar perfiles conju-gados. Sean tres planos π1, π2, π3 superpuestos que evolucionan definiendolos correspondientes movimientos relativos recıprocos. Si existe un puntoP3 del plano π3 que durante todo el movimiento se encuentra situado en larecta que contiene a los centros instantaneos de los movimientos relativosde los tres planos, entonces las trayectorias de P3 respecto a los planosπ1, π2 son una pareja de perfiles conjugados. En efecto, las velocidades deP3 respecto a π1, π2 son paralelas por lo que las trayectorias son tangentes.Este resultado, conocido como teorema de Rutz, permite generar perfilesconjugados para cualquier movimiento de la siguiente forma.
Dado el movimiento de un plano π2 respecto a otro π1, puede elegirseuna curva Γ1 de π1, sobre la que se hace rodar sin deslizar una recta δ3 de

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 34 de 41
modo que siempre contenga al punto I21. El centro instantaneo de rotacionI32 del movimiento de δ3 respecto a π2 debe encontrarse sobre la recta δ3,en virtud del teorema de los tres centros; la polar del plano π2 de estemovimiento es una curva Γ2 de π2. Sea un punto P3 ∈ δ3 Las trayectoriasde P3 respecto a los planos π1, π2 son perfiles conjugados en virtud delteorema de Rutz. Estas trayectorias son las evolventes de Γ1,Γ2, por loque este metodo de generar perfiles conjugados recibe el nombre de metodode las evolventes.
Por ejemplo, sea el movimiento plano definido por los cilindros π1, π2
que ruedan sin deslizar y tienen sus centros fijos respecto a un sistema π0.Se elige como curva Γ1 una circunferencia concentrica con el cilindro de π1.Como el centro instantaneo I21 esta siempre en el mismo sitio respecto aπ0, la recta δ3 siempre pasa por este punto y es tangente a Γ1, sobre la querueda sin deslizar. La trayectoria de un punto cualquiera de δ3 respecto aΓ1 es una evolvente de cırculo. La curva de π2 a la que es tangente δ3 estambien un cırculo Γ2, de modo que la trayectoria de un punto cualquiea deδ3 respecto a π2 es otra evolvente de cırculo. Por lo tanto, las evolventes decırculo constituyen una pareja de perfiles conjugados de este movimiento.Estas curvas constituyen perfiles de engranajes.
Otro metodo de generacion de perfiles conjugados lo constituye el dela ruleta auxiliar. Si se hace rodar una curva cualquiera (ruleta auxiliar)sobre la base y ruleta de un movimiento plano, haciendo concidir los centrosinstantaneos definidos, las trayectorias de un punto P3 del plano de la ruletaauxiliar respecto a los planos fijo y movil son siempre tangentes ya que lasvelocidades de P3 respecto a etos planos son perpendiculares a la recta queune dicho punto con el CIR y por lo tanto son paralelas.

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 35 de 41
Por ejemplo, haciendo rodar una circunferencia sobre un movimiento enel que la base y la ruleta son circunferencias exteriores, se pueden generarhipo y epi cicloides que se comportan como perfiles conjugados.

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 36 de 41
11. Cinemas
En las aplicaciones tecnicas de la cinematica se han considerado los cin-emas como unas herramientas de gran utilidad. La idea de los cinemases disponer de mapas de velocidades y aceleraciones en los que se puedavisualizar la distribucion de estas magnitudes en un mecanismo.
En lo que sigue se hara referencia al mapa del mecanismo mm , quehace referencia a una representacion plana de las distintas partes de unmecanismo con las posiciones que adoptan en un cierto momento. En esteplano se contemplan los puntos de las distintas partes del mecanismo, deforma que existen puntos superpuestos pertenecientes a distintos organosmoviles.
El cinema de velocidades es una aplicacion de los puntos del mapa delmecanismo en un plano, llamado mapa de velocidades mv que verifica lassiguientes condiciones
• existen definidos un origen o en el mapa de velocidades y un factor deescala β con dimensiones de tiempo.
• para cada punto A ∈ mm el cinema asigna otro punto a ∈ mv deforma que
−→oa = β−→v A
Es inmediato deducir las siguientes propiedades del cinema de veloci-dades

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 37 de 41
• dados dos puntos A,B ∈ mm pertenecientes al mismo organo rıgido,los vectores
−→AB,−→ab son perpendiculares. En efecto,
−→ab =
−→ob −−→oa = β(−→v B −−→v A) = β−→ω ×−→AB
donde −→ω es la rotacion del organo al que pertenecen A,B.
• Dados tres puntos A,B,C ∈ mm pertenecientes al mismo organorıgido, los triangulos A,B,C y a, b, c son semejantes. En efecto, loslados de este ultimo son perpendiculares a los del primero, segun elresultado anterior. Por lo tanto los angulos de los dos triangulos soniguales.
El cinema de aceleraciones es una aplicacion de los puntos del mapa delmecanismo en un plano, llamado mapa de aceleraciones ma que verifica lassiguientes condiciones
• existen definidos un origen o′ en el mapa de velocidades y un factorde escala γ con dimensiones del cuadrado de un tiempo.
• para cada punto A ∈ mm el cinema asigna otro punto a′ ∈ ma deforma que −→
o′a′ = β−→a A
Es inmediato deducir las siguientes propiedades del cinema de veloci-dades
• dados dos puntos A,B ∈ mm pertenecientes al mismo organo rıgido, elangulo que forman los vectores
−→AB,−→a′b′ es independiente de la eleccion

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 38 de 41
de estos puntos dentro de su organo rıgido. En efecto,−→a′b′ =
−→o′b′ −
−→o′a′ = γ(−→a B −−→a A) = γ(−→ω ×−→AB − ω2−→AB)
donde −→ω es la rotacion del organo al que pertenecen A,B. Este vectorconsta de una parte paralela a
−→AB, (−ω2−→AB) y otra perpendicular−→
AB, (−→ω ×−→AB) cuya relacion es constante.
• Dados tres puntos A,B,C ∈ mm pertenecientes al mismo organorıgido, los triangulos A,B,C y a, b, c son semejantes. En efecto, segunel resultado anterior, los angulos de los dos triangulos son iguales.
• Dados dos puntos A,B ∈ mm del mismo organo rıgido, la comonentede−→a′b′ segun el vector unitario −→u paralelo a
−→AB (−→u =
−→AB|−→AB|) es
−→a′b′ · −→u = −γ
β
|−→ab |2
|−→AB|donde a, b son los puntos correspondientes de mv. En efecto, de
−→a′b′ =
−→o′b′ −
−→o′a′ = γ(−→a B −−→a A) = γ(−→ω ×−→AB − ω2−→AB)
se tiene
−→a′b′ · −→u = −γω2|−→AB| = −γ (ω|−→AB|)2
|−→AB|= −γ
β
|−→ab |2
|−→AB|Si se dispone de una representacion a escala α del mecanismo, deforma que
−−→A′B′ = α
−→AB, entonces se tendrıa
−→a′b′ · −→u = −γα
β
|−→ab |2
|−→AB|

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 39 de 41
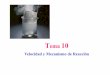
Estos resultados agilizan la construccion de cinemas. Por ejemplo, seael mecanismo de la figura, del que se conoce la velocidad y aceleracion deA. Se trata de obtener los cinemas de velocidades y aceleraciones de lasbarras OA y AB.
Para trazar el cinema de velocidades se parte de la velocidad de A que esconocida y permite posicionear a. A continuacion se traza la perpendiculara−→AB desde A que debe contener a b en virtud del primer resutado deducido
para los cinemas de velocidades. Como por otra parte, la direccion de lavelocidad de B se conoce, se traza otra recta paralela a dicha direcciondesde O. La interseccion de ambas rectas es b. La barra OA se aplica enla oa (rojas), mientras que la barra AB se aplica en la barra ab (azules).

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 40 de 41
El cinema de aceleracines parte de la aceleracion de A que se suponeconocida de forma que a′ se situa en ma. A partir de a′ se lleva unalongitud
−→a′b′ · −→u sobre −→u calculada segun la tercera propiedad del cinema
de aceleraciones. a partir del extremo de este segmento, se traza unaperpendicular a −→u sobre la que debe encontrarse b′. Como la direccion dela aceleracion de B es la del carril sobre el que se mueve, b′ debe encontrarseen la paalela a este carril desde o′. De esta forma se determina b′ ası comoel segmento homologo del AB (azul) y del OA (rojo).

DFAIIMεcFunNεt
Tıtulo
Contenido
JJ II
J I
Volver Atras
Cerrar
Salir
Pagina 41 de 41
Las velocidades y aceleraciones de todos los puntos solidarios a una uotra barra se obtienen en el sistema posicionando en los cinemas los puntoshomologos correspondientes guardando la semejanza y orientacion de lasformas geometricas correspondientes.