Embed Size (px)
Citation preview

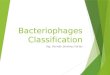
Classification: signatures spectrales

L’espace de représentation et les méthodes de classification
Réf
lect
ance
s
Longueur d'onde
Eau
Sol nu
Feuillus
réflectance
réfl
ecta
nce
Eau
Feuillus
Sol nu
réflectance
réfl
ecta
nce
Eau
Feuillus
Sol nu
Situation idéale
Situation réelle
• Dans une situation idéale, chaque classe d’objets est représentée par un point unique dans cet espace.
• À cause des variations des conditions d'illumination ainsi que les variations des propriétés des objets, les pixels appartenant à une classe d'objets sont représentés par une série de points plus ou moins dispersés dans cet espace.
• Les méthodes de classification visent à définir les équations mathématiques qui permettent de localiser dans cet espace les limites de
chacune des classes

F
C
B
Bande 1
B
and
e 2
S
x
F : feuillus
C : conifères
B : béton
S : sol à nu
Un exemple: quatre domaines ont été identifiés, le pixel X dont la classe est recherchée, est représenté dans l’espace d’attributs. Il tombe dans le domaine de feuillus…la classe feuillus lui est alors assignée

Le problème de classificationCOMMENT DÉFINIR LE DOMAINE DE CHAQUE CLASSE????
DEUX APPROCHES: DIRIGÉE : un échantillon de pixels dont la
classe est connue est analysé afin de définir les domaines
NON-DIRIGÉE: un échantillon de pixels est analysé afin de définir des groupements de pixels dans l’espace d’attributs. Chaque groupement (cluster) définit un domaine dont la signification géographique reste à établir

La classification dirigée: quelques techniques de base

La classification par distance minimale
Hypothèse: le domaine d’une classe est défini en fonction de la proximité (distance euclidienne) de tous les points du domaine à un point central:
• l’analyste fournit des échantillons de pixels par classe
• L’algorithme calcule le centre de chaque classe (moyennes)
Illustration

Distance minimale
Bande 1(valeurs numériques)
Ban
de 2
(val
eurs
num
ériq
ues)
2221
21111 )MP()MP(D BWB_BWB_W
2221
21111 )MP()MP(D BCB_BCB_C
Etc.
Parmi ces distances quelle est la plus courte? Assigne le pixel 1 à la classe pour laquelle la distance est minimale

Les domaines des classes implicitement définis (polygones de Thiessen)
Bande 1(valeurs numériques)
Ban
de 2
(val
eurs
num
ériq
ues)

Exemple: image SPOT à 4 bandes

Choix de pixels échantillons
Classes:
Eau;
Gazon;
Boisés;
Sol à nu;
Bâti;
Surfaces pavées.

Diffusiogrammes ROUGE-PIR
Image entière

Diffusiogrammes ROUGE-PIR
Image entière EAU

Diffusiogrammes ROUGE-PIR
Image entière GAZON

Diffusiogrammes ROUGE-PIR
Image entière BOISÉ

Diffusiogrammes ROUGE-PIR
Image entière SOL À NU

Diffusiogrammes ROUGE-PIR
Image entière BÂTI

Diffusiogrammes ROUGE-PIR
Image entière SURFACES PAVÉES

CLASSIFICATION FINALE

La classification par parallélépipèdes
Hypothèse: le domaine d’une classe est défini en fonction de la proximité de tous les points du domaine à un point central: la proximité est évaluée tenant compte de l’écart type dans chaque bande spectrale
• l’analyste fournit des échantillons de pixels par classe• L’algorithme calcule le centre de chaque classe
(moyennes) ainsi que la dispersion (écarts types) Illustration

La classification par parallélépipèdes

La classification par maximum de vraisemblance (cas paramétrique)
Hypothèse: le domaine d’une classe, supposée distribuée normalement, est défini en fonction de la proximité de tous les points du domaine à un point central: la proximité est évaluée tenant compte de la matrice de variance-covariance
• l’analyste fournit des échantillons de pixels par classe• L’algorithme calcule le centre de chaque classe
(moyennes) ainsi que la dispersion dans l’espace multidimensionnel (matrices de variance-covariance)
Illustration

La classification par maximum de vraisemblance (cas paramétrique)

Exemple: Image à classifier: 3 bandes spectrales (V-R-PIR) + 15 m de
résolution spatiale + été

Choix des sites d’entraînement par classe
Règles:
a) Par classe les sites doivent totaliser plus que 30 pixels
b) Ils doivent être pris à différents endroits sur l’image pour capter la variabilité intra-classe

Choix des sites d’entraînement par classe
Exemple1: Eau

Choix des sites d’entraînement par classe
Exemple2: Urbain
classe 1: forte densité du bâti
Classe 2: faible densité du bâti

Choix des sites d’entraînement par classe
Exemple3: Rural
classe 1: boisés
Classe 2: sol à nu

Génération des ‘signatures spectrales’

Test de classification

Test de classification (en noir pixels non classifiés)
Résultat mitigé; surtout beaucoup de pixels non classifiés possibilités d’amélioration:Spécifiez de nouvelles classes; mieux définir les sites d’entraînement…etc.

Revenons aux méthodes avec des explications théoriques

La classification dirigée La plupart des classificateurs dirigés adoptent
une vision probabiliste de ce qu’une classe et se fondent sur une règle d’attribution d’un vecteur de mesures à une classe: la règle de Bayes

La règle de BAYES: un exemple
Un paléontologue trouve un fragment d’un fossile d’un animal marin dans la zone de jonction des deux ruisseaux. Dans quel bassin versant se trouvent des restes plus complets de cet animal?
H1: le bassin de 18 km2H2: le bassin de 10 km2

La règle de BAYES: un exemple Probabilités a priori fonction de la taille relative
du basin:P(H1) = 18/28 = 0,64P(H2) = 10/28 = 0,36 Probabilité conditionnelle (VRAISEMBLANCE):
par une carte géologique il calcule que 35% des roches du Crétacé dans le bassin H1 est d’origine marine tandis que 80% le sont dans le bassin H2
P (E|H1) = 0,35; P(E|H2)=0,80

La règle de BAYES: un exemple
La règle de Bayes:P (H1|E) = probabilité a posteriori étant donné le
fossile E, ceci provient du bassin H1P (H2|E) = probabilité a posteriori étant donné le
fossile E, ceci provient du bassin H1
Le fossile provient du bassin avec le maximum de probabilité a posteriori

La règle de BAYES: un exemple
La règle de Bayes:
a posteriori = (vraisemblance x a priori)/évidence
Évidence = P(E|H1)*P(H1) + P(E|H2)*P(H2)=
(0,35 *0,64 + 0,80*0,36) = 0,51

La règle de BAYES: un exemple
La règle de Bayes:
P(H1|E) = 0,35*0,64/0,51 = 0,44
P(H2|E) = 0,80*0,36/0,51 = 0,56
Donc H2

Algorithme de calcul
Puisque l’évidence est pareille pour toutes les classes, la règle se simplifie comme suit:
Pour minimiser les erreurs (mauvaises classifications) :

Algorithme de classification
Solution 1: paramétrique
Solution 2: non paramétrique
Si toutes les classes sont équiprobables la règle s’exprime tout simplement : assigne le vecteur de mesures x à la classe avec le maximum de vraisemblance. Mais comment connaître la vraisemblance par classe?

Solution paramétrique: hypothèse les classes ont une distribution qui suit la loi de la distribution multinormale
• ….Un rappel des notions statistiques
p(x
x) exp
1
2
1
2
2

Distribution multi-normale
• ….Un rappel des notions statistiques
p(x x xN
T ) exp
1
2
1
2212
1

x 70.6 28.8 29.8 36.7 55.7 28.2
TM1 TM2 TM3 TM4 TM5 TM6
TM1 47.65
TM2 24.76 15.70
TM3 35.71 20.34 31.91
TM4 12.45 8.27 12.01 20.56
TM5 34.71 23.79 38.81 22.30 114.89
TM6 30.46 18.70 30.86 12.99 60.63 44.92
Matrice de variance-covariance
Un rappel des notions statistiques

• ….Un rappel des notions statistiquesComposantes principales (variance selon ses axes=valeurs propres)…
Ellipse de probabilité constante

Algorithme de calculAinsi en remplaçant par la formule de la distribution multinormale et en prenant les logarithmes naturelles nous pouvons arriver à la formulation de la règle de décision du classificateur (fonctions discriminantes)

Formulation

Domaines des classes (implicitement définis)
• Domaines des classes 2-D
• Domaines des classes 3-D

Classificateurs non paramétriques
Contrairement aux classificateurs paramétriques ceux dits non paramétriques ne font aucune hypothèse quant à la distribution de probabilité des valeurs d’une classe quelconque. Une des méthodes souvent utilisées est celle des k-plus proches voisins. La probabilité d’appartenance d’un point à un domaine quelconque est approchée par la fréquence relative des prototypes par classe sur les k prototypes retrouvés les plus proches. Le nombre k ainsi que l’étendue du voisinage sont définis par l’opérateur. Le point est alors attribué à la classe avec la plus forte probabilité d’appartenance.
Exemple: il y a quatre classesNoir (N), Gris foncé (GF), gris pâle (GP) et blanc (B). L’utilisateur a fixé le nombre de plus proches prototypes voisins à 10. Pour chaque vecteur à classer, l’algorithme cherche alors ces 10 plus proches voisins. Ici il y a 6 B, 2 GF et 2 GP. Le pixel est classifié dans la classe B. Dansun cas d’égalité, l’algorithme choisit la classe dont les prototypes sont les moins éloignés en termes de distance euclidienne du point examiné

Qualité de la classification
• On teste la qualité des sites d’entraînement
• Si la qualité est acceptable on passe à la validation de la classification, sinon on recommence avec le choix des sites
• La validation: on choisit des sites tests dont on connaît la classe et on vérifie les résultats de la classification

Exemple: qualité des sites choisis – mesure de séparabilité
Ici Divergence Transformée : si 2 séparabilité parfaite

L’évaluation quantitative: la matrice de confusion
C’est un tableau à double entrée (table de contingence)comportant les classes
classe 1 2 3
1
2
3
Classes tests
Classes
affectées

Qualité de la classification
Matrice de confusion

Validation

Classification non dirigée

Recherche des pics et des vallées: histogramme multidimensionel

Classification non dirigée (par Classification non dirigée (par coalescence) ou (clustering): K-clusterscoalescence) ou (clustering): K-clusters
L’analyste spécifie a) le nombre de classes (K) b) les paramètres d’arrêt de L’analyste spécifie a) le nombre de classes (K) b) les paramètres d’arrêt de l’algorithmel’algorithme
L’algorithme L’algorithme 1.1. regroupe les données (processus itératif) – il établit les centres des regroupe les données (processus itératif) – il établit les centres des
classes (une classe = un cluster) spectrales, spatiales,…classes (une classe = un cluster) spectrales, spatiales,…
2. classifie tous les pixels selon leur proximité aux centres des clusters2. classifie tous les pixels selon leur proximité aux centres des clusters
3. produit l’image classifiée3. produit l’image classifiée
L’analyste trouve la signification des clusters L’analyste trouve la signification des clusters (il se peut que certains clusters soient regroupés)(il se peut que certains clusters soient regroupés)

Comment établissons-nous les centres?
illustration

Exemple: regrouper en deux classes

Début: choix des deux centres arbitraires
Centres initiaux

Assigner un pixel à un des deux centres selon sa distance euclidienne

Calculer la nouvelle position des deux centres selon les positions des pixels assignés à l’étape précédente

Réassigner les pixels aux nouveaux centres

Arrêter lorsque les déplacements des centres est inférieur à un seuil

Clusters vs. Clusters vs. Classes thématiquesClasses thématiques
ClustersClusters Classes thématiquesClasses thématiques
AABB
1122
IdéalIdéal
RéalitéRéalité
AABBCC
11
22
ououAA
BBCC
11223344 Vieille asphalte Vieille asphalte
Asphalte Asphalte fraîchefraîche
BétonBéton
Classe thématique: route
Asphalte

Limitations
• Le nombre de classes?
• La séparation des classes qui n’ont pas une distribution circulaire?
Données originales
Données classées

Exemple: Image à classifier: 3 bandes spectrales (V-R-PIR) + 15 m de résolution
spatiale + été
16 clusters demandés

Exemple de classification non dirigée