Embed Size (px)
Citation preview
1
RESUMEN El artículo presenta una síntesis del fenómeno de Resonancia Subsíncrona (RSS) y una visión amplia de los fenómenos de Oscilaciones Subsíncronas (OSS). Además se muestra una herramienta computacional de análisis modal para el estudio de la resonancia subsíncrona. Usando esta herramienta computacional de análisis modal se realizará un diagnóstico de un caso de resonancia subsíncrona, ocurrido en el SEIN, haciendo una comparación con los resultados de un método combinado de Barrido en Frecuencia y simulaciones de transitorios electromagnéticos en el dominio del tiempo para identificar los riesgos de amplificación de torque debido a la RSS. Los resultados obtenidos se complementan muy bien en la explicación del diagnóstico de un caso real de RSS en el sistema eléctrico interconectado Nacional del Perú. 1. INTRODUCCIÓN Los sistemas eléctricos de potencia con líneas de transmisión de gran longitud son
muy complejos y requieren un cuidadoso planeamiento, diseño y operación. En este contexto, los bancos de capacitores serie representan la solución económica para incrementar la capacidad de transmisión y mejorar la estabilidad del sistema. Con la inclusión de capacitores serie, en el sistema eléctrico de potencia se conforman circuitos serie R-L-C que crean voltajes y corrientes con frecuencias de resonancia por debajo de la fundamental, estas frecuencias se denominan subsíncronas, las cuales provocan las denominadas oscilaciones subsíncronas (OSS), que conviven en el sistema sin presentar mayores problemas, ya que son amortiguadas por la resistencia del circuito. Estas corrientes subsíncronas producen en el estator de una máquina síncrona un campo magnético giratorio que se mueve a una velocidad 𝑓𝑠𝑢𝑏 y este campo induce en su
rotor, una corriente de frecuencia 𝑓𝑟𝑜𝑡𝑜𝑟 =𝑓0 − 𝑓𝑠𝑢𝑏. Si la frecuencia del torque producido por esta corriente del rotor coincide con alguna de las frecuencias de oscilación torsional del sistema mecánico turbina-generador (conformado por varias masas y el sistema de ejes conectando estas
DIAGNOSTICO DE UN CASO DE RESONANCIA SUBSÍNCRONA EN EL SEIN UTILIZANDO EL ANALISIS MODAL
JEFFERSON CHAVEZ A. ROBERTO RAMIREZ A. Especialista de Planificación Subdirector de Nuevos Proyectos
DIRECCION DE PLANIFICACION - COES-SINAC DATOS DE LA EMPRESA
Dirección: Código Postal: Teléfono: (511) 611-8585 E-Mail: [email protected] [email protected]
PALABRAS-CLAVE: Sistemas de Potencia, Oscilaciones subsíncronas, Resonancia Subsíncrona.
COMITÉ DE OPERACIÓN ECONÓMICA DEL SISTEMA (COES-SINAC) PERÚ Calle Manuel Roaud y Paz Soldán 364. San Isidro, Lima - Perú. Lima, 1 de agosto de 2017.
Código de subtema: T1-3
2
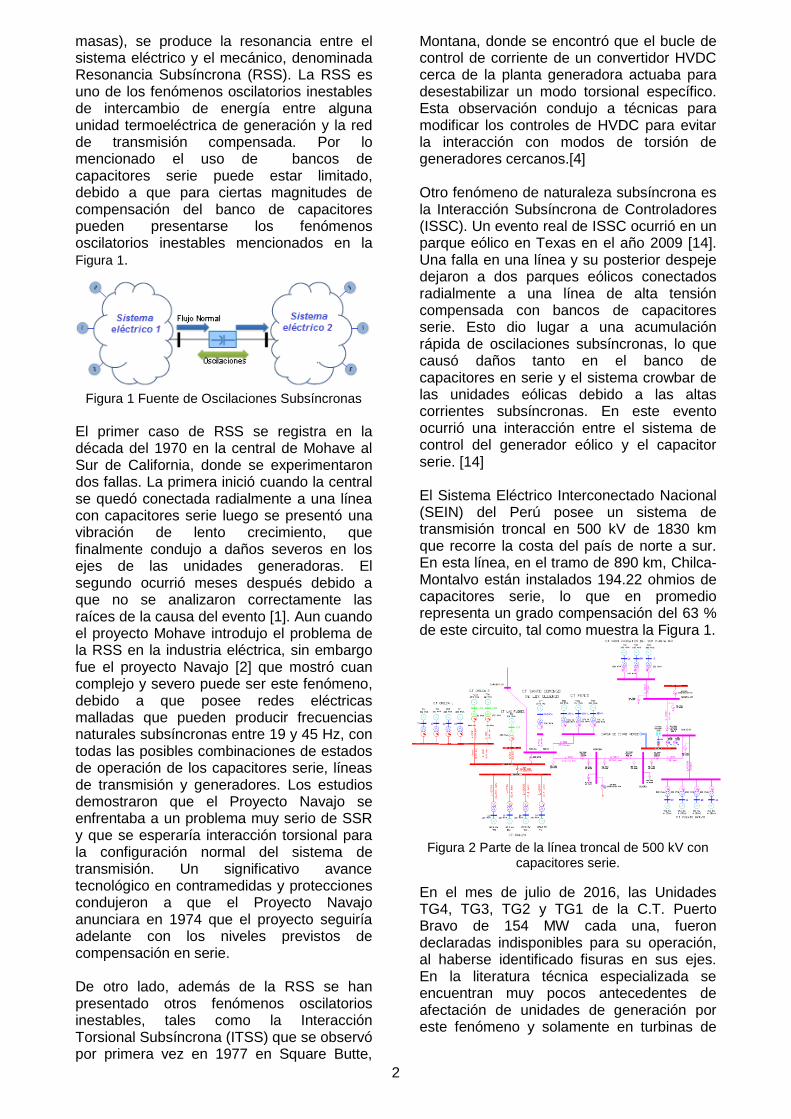
masas), se produce la resonancia entre el sistema eléctrico y el mecánico, denominada Resonancia Subsíncrona (RSS). La RSS es uno de los fenómenos oscilatorios inestables de intercambio de energía entre alguna unidad termoeléctrica de generación y la red de transmisión compensada. Por lo mencionado el uso de bancos de capacitores serie puede estar limitado, debido a que para ciertas magnitudes de compensación del banco de capacitores pueden presentarse los fenómenos oscilatorios inestables mencionados en la Figura 1.
Figura 1 Fuente de Oscilaciones Subsíncronas
El primer caso de RSS se registra en la década del 1970 en la central de Mohave al Sur de California, donde se experimentaron dos fallas. La primera inició cuando la central se quedó conectada radialmente a una línea con capacitores serie luego se presentó una vibración de lento crecimiento, que finalmente condujo a daños severos en los ejes de las unidades generadoras. El segundo ocurrió meses después debido a que no se analizaron correctamente las raíces de la causa del evento [1]. Aun cuando el proyecto Mohave introdujo el problema de la RSS en la industria eléctrica, sin embargo fue el proyecto Navajo [2] que mostró cuan complejo y severo puede ser este fenómeno, debido a que posee redes eléctricas malladas que pueden producir frecuencias naturales subsíncronas entre 19 y 45 Hz, con todas las posibles combinaciones de estados de operación de los capacitores serie, líneas de transmisión y generadores. Los estudios demostraron que el Proyecto Navajo se enfrentaba a un problema muy serio de SSR y que se esperaría interacción torsional para la configuración normal del sistema de transmisión. Un significativo avance tecnológico en contramedidas y protecciones condujeron a que el Proyecto Navajo anunciara en 1974 que el proyecto seguiría adelante con los niveles previstos de compensación en serie. De otro lado, además de la RSS se han presentado otros fenómenos oscilatorios inestables, tales como la Interacción Torsional Subsíncrona (ITSS) que se observó por primera vez en 1977 en Square Butte,
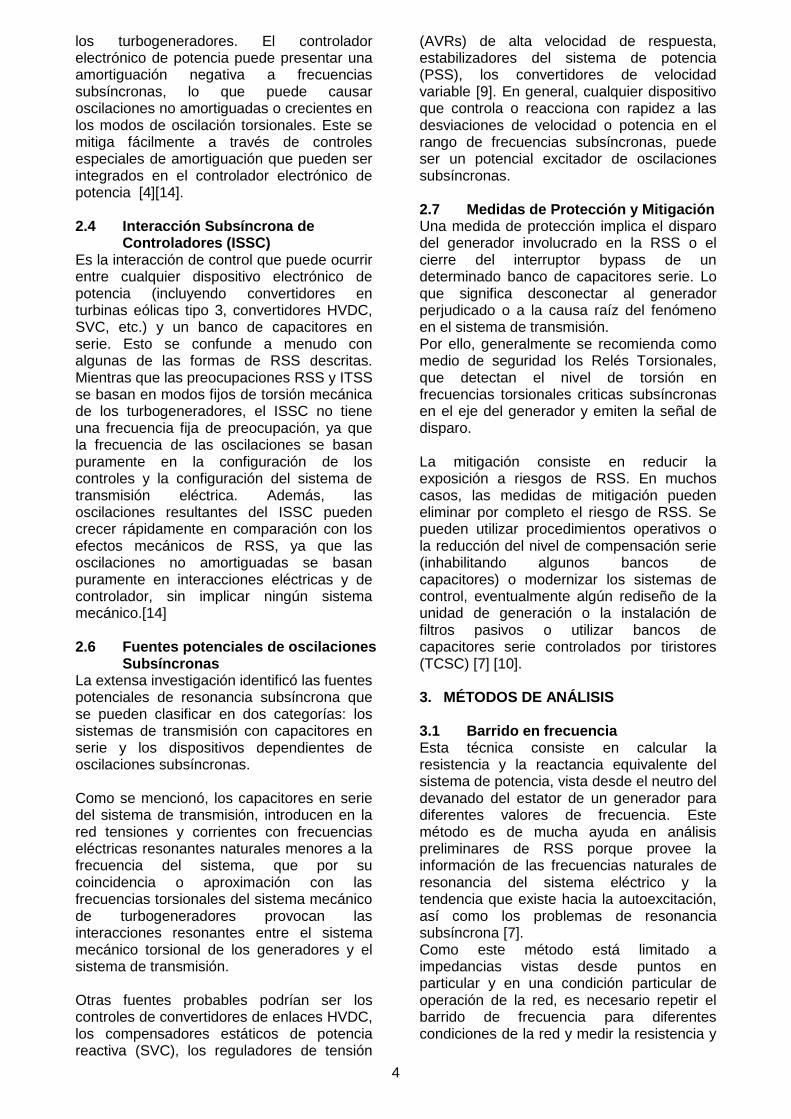
Montana, donde se encontró que el bucle de control de corriente de un convertidor HVDC cerca de la planta generadora actuaba para desestabilizar un modo torsional específico. Esta observación condujo a técnicas para modificar los controles de HVDC para evitar la interacción con modos de torsión de generadores cercanos.[4] Otro fenómeno de naturaleza subsíncrona es la Interacción Subsíncrona de Controladores (ISSC). Un evento real de ISSC ocurrió en un parque eólico en Texas en el año 2009 [14]. Una falla en una línea y su posterior despeje dejaron a dos parques eólicos conectados radialmente a una línea de alta tensión compensada con bancos de capacitores serie. Esto dio lugar a una acumulación rápida de oscilaciones subsíncronas, lo que causó daños tanto en el banco de capacitores en serie y el sistema crowbar de las unidades eólicas debido a las altas corrientes subsíncronas. En este evento ocurrió una interacción entre el sistema de control del generador eólico y el capacitor serie. [14] El Sistema Eléctrico Interconectado Nacional (SEIN) del Perú posee un sistema de transmisión troncal en 500 kV de 1830 km que recorre la costa del país de norte a sur. En esta línea, en el tramo de 890 km, Chilca-Montalvo están instalados 194.22 ohmios de capacitores serie, lo que en promedio representa un grado compensación del 63 % de este circuito, tal como muestra la Figura 1.
Figura 2 Parte de la línea troncal de 500 kV con
capacitores serie.
En el mes de julio de 2016, las Unidades TG4, TG3, TG2 y TG1 de la C.T. Puerto Bravo de 154 MW cada una, fueron declaradas indisponibles para su operación, al haberse identificado fisuras en sus ejes. En la literatura técnica especializada se encuentran muy pocos antecedentes de afectación de unidades de generación por este fenómeno y solamente en turbinas de

3
vapor. No existen casos registrados para turbinas de gas. En octubre del 2016 el propietario de esta central termoeléctrica informó al operador del SEIN que la causa de los eventos que ocasionaron la indisponibilidad de las unidades de la C.T. Puerto Bravo había sido causada por RSS. Asimismo, mencionó que para evitar una nueva afectación a la operación de la C.T. Puerto Bravo, se requería que estuviese fuera de servicio el banco de capacitores serie de 80,2 ohmios de la S.E. Poroma. El operador del SEIN dio inicio a un estudio para el diagnóstico del fenómeno ocurrido para identificar y evaluar el riesgo de eventos de RSS en las centrales termoeléctricas del SEIN, y proponer alguna medida temporal de mitigación del fenómeno de RSS [16] El objetivo del presente trabajo es el desarrollo de una herramienta computacional de Análisis Modal para el diagnóstico de Resonancia Subsíncrona, aplicándolo al caso ocurrido en el SEIN, haciendo una comparación con resultados de la aplicación de un método combinado de Barrido en Frecuencia y simulaciones de Transitorios Electromagnéticos en el dominio del tiempo para identificar los riesgos de RSS. 2. CONCEPTOS FUNDAMENTALES DE
RSS La RSS es un fenómeno inestable que provoca una amplificación del torque mecánico, debido al amortiguamiento negativo generado por las corrientes subsíncronas, y la aceleración sobre el eje de torques causando fatiga de tipo torsional en los materiales usados en la manufactura de los ejes. Existen varios efectos e interacciones relacionadas con este fenómeno.
2.1 Efecto de generador de Inducción
(EGI) Este efecto es provocado por la autoexcitación de una maquina sincrona impulsada por la turbina a la velocidad síncrona y conectada por sus bornes al sistema eléctrico que posee capacitores serie en algunas de sus líneas de transmisión. Entonces, existirán corrientes de armadura de frecuencia subsíncrona que producen una f.m.m. de armadura que gira a una velocidad subsíncrona, mientras que el rotor gira a la velocidad síncrona, configurándose un generador de inducción, en forma superpuesta a su operación como generador síncrono a la frecuencia fundamental.
Para que se establezca en forma sostenida el fenómeno de generador de inducción, el circuito eléctrico visto desde el rotor del generador debe ser resonante a una frecuencia subsíncrona; asimismo, se debe cumplir que la resistencia positiva de la red, que se ve desde el rotor de la máquina tenga un valor absoluto menor que la resistencia equivalente negativa del rotor (debido al deslizamiento negativo). Este fenómeno, que es puramente eléctrico, no depende de la excitación de los modos naturales del sistema mecánico del sistema de ejes del turbogenerador y afecta a turbogeneradores y a los generadores de plantas eólicas.[7] [13] [14]
2.2 Interacción torsional (IT) Este es el tipo clásico de RSS que se ha descrito en la introducción. Es la interacción de tipo torsional entre los circuitos con capacitores serie del sistema de potencia y el sistema mecanico torsional de los turbogeneradores. [11]
2.3 Amplificación de Torque Transitorios (ATT)
Este tipo de RSS es similar al de Interacción Torsional, pero se inicia como consecuencia de una gran perturbación en el sistema de potencia. Por ejemplo, si se produce una falla, fluirán grandes corrientes que generan torques en el entrehierro de los generadores electricamente cercanos a la falla. Si los capacitores en serie están instalados en la zona de la falla, la corriente de falla tenderá a oscilar a la frecuencia de resonancia serie del sistema local. Entonces los modos naturales de las masas del eje (modos torsionales) de los turbogeneradores cercanos pueden ser excitados si la frecuencia de estos modos torsionales están cerca de la frecuencia complemetaria de las corrientes oscilantes. Los esfuerzos que actúan sobre el material de los ejes del generador no se acumulan de manera lenta como en el caso de la IT, estos aparecen de manera súbita en proporción directa a la magnitud de la corriente de falla del generador. Los daños en el eje pueden presentarse rápidamente en una determinada perturbación.[7] [13]
2.5 Interacción Torsional Subsíncrona (ITSS)
Es la interacción entre un dispositivo con controles activos (controladores de electrónica de potencia de sistemas HVDC, Compensación reactiva estática SVC, FACTS, etc.) y sistema mecánico torsional de
4
los turbogeneradores. El controlador electrónico de potencia puede presentar una amortiguación negativa a frecuencias subsíncronas, lo que puede causar oscilaciones no amortiguadas o crecientes en los modos de oscilación torsionales. Este se mitiga fácilmente a través de controles especiales de amortiguación que pueden ser integrados en el controlador electrónico de potencia [4][14]. 2.4 Interacción Subsíncrona de
Controladores (ISSC) Es la interacción de control que puede ocurrir entre cualquier dispositivo electrónico de potencia (incluyendo convertidores en turbinas eólicas tipo 3, convertidores HVDC, SVC, etc.) y un banco de capacitores en serie. Esto se confunde a menudo con algunas de las formas de RSS descritas. Mientras que las preocupaciones RSS y ITSS se basan en modos fijos de torsión mecánica de los turbogeneradores, el ISSC no tiene una frecuencia fija de preocupación, ya que la frecuencia de las oscilaciones se basan puramente en la configuración de los controles y la configuración del sistema de transmisión eléctrica. Además, las oscilaciones resultantes del ISSC pueden crecer rápidamente en comparación con los efectos mecánicos de RSS, ya que las oscilaciones no amortiguadas se basan puramente en interacciones eléctricas y de controlador, sin implicar ningún sistema mecánico.[14] 2.6 Fuentes potenciales de oscilaciones Subsíncronas La extensa investigación identificó las fuentes potenciales de resonancia subsíncrona que se pueden clasificar en dos categorías: los sistemas de transmisión con capacitores en serie y los dispositivos dependientes de oscilaciones subsíncronas. Como se mencionó, los capacitores en serie del sistema de transmisión, introducen en la red tensiones y corrientes con frecuencias eléctricas resonantes naturales menores a la frecuencia del sistema, que por su coincidencia o aproximación con las frecuencias torsionales del sistema mecánico de turbogeneradores provocan las interacciones resonantes entre el sistema mecánico torsional de los generadores y el sistema de transmisión. Otras fuentes probables podrían ser los controles de convertidores de enlaces HVDC, los compensadores estáticos de potencia reactiva (SVC), los reguladores de tensión
(AVRs) de alta velocidad de respuesta, estabilizadores del sistema de potencia (PSS), los convertidores de velocidad variable [9]. En general, cualquier dispositivo que controla o reacciona con rapidez a las desviaciones de velocidad o potencia en el rango de frecuencias subsíncronas, puede ser un potencial excitador de oscilaciones subsíncronas. 2.7 Medidas de Protección y Mitigación Una medida de protección implica el disparo del generador involucrado en la RSS o el cierre del interruptor bypass de un determinado banco de capacitores serie. Lo que significa desconectar al generador perjudicado o a la causa raíz del fenómeno en el sistema de transmisión. Por ello, generalmente se recomienda como medio de seguridad los Relés Torsionales, que detectan el nivel de torsión en frecuencias torsionales criticas subsíncronas en el eje del generador y emiten la señal de disparo. La mitigación consiste en reducir la exposición a riesgos de RSS. En muchos casos, las medidas de mitigación pueden eliminar por completo el riesgo de RSS. Se pueden utilizar procedimientos operativos o la reducción del nivel de compensación serie (inhabilitando algunos bancos de capacitores) o modernizar los sistemas de control, eventualmente algún rediseño de la unidad de generación o la instalación de filtros pasivos o utilizar bancos de capacitores serie controlados por tiristores (TCSC) [7] [10]. 3. MÉTODOS DE ANÁLISIS 3.1 Barrido en frecuencia Esta técnica consiste en calcular la resistencia y la reactancia equivalente del sistema de potencia, vista desde el neutro del devanado del estator de un generador para diferentes valores de frecuencia. Este método es de mucha ayuda en análisis preliminares de RSS porque provee la información de las frecuencias naturales de resonancia del sistema eléctrico y la tendencia que existe hacia la autoexcitación, así como los problemas de resonancia subsíncrona [7]. Como este método está limitado a impedancias vistas desde puntos en particular y en una condición particular de operación de la red, es necesario repetir el barrido de frecuencia para diferentes condiciones de la red y medir la resistencia y
5
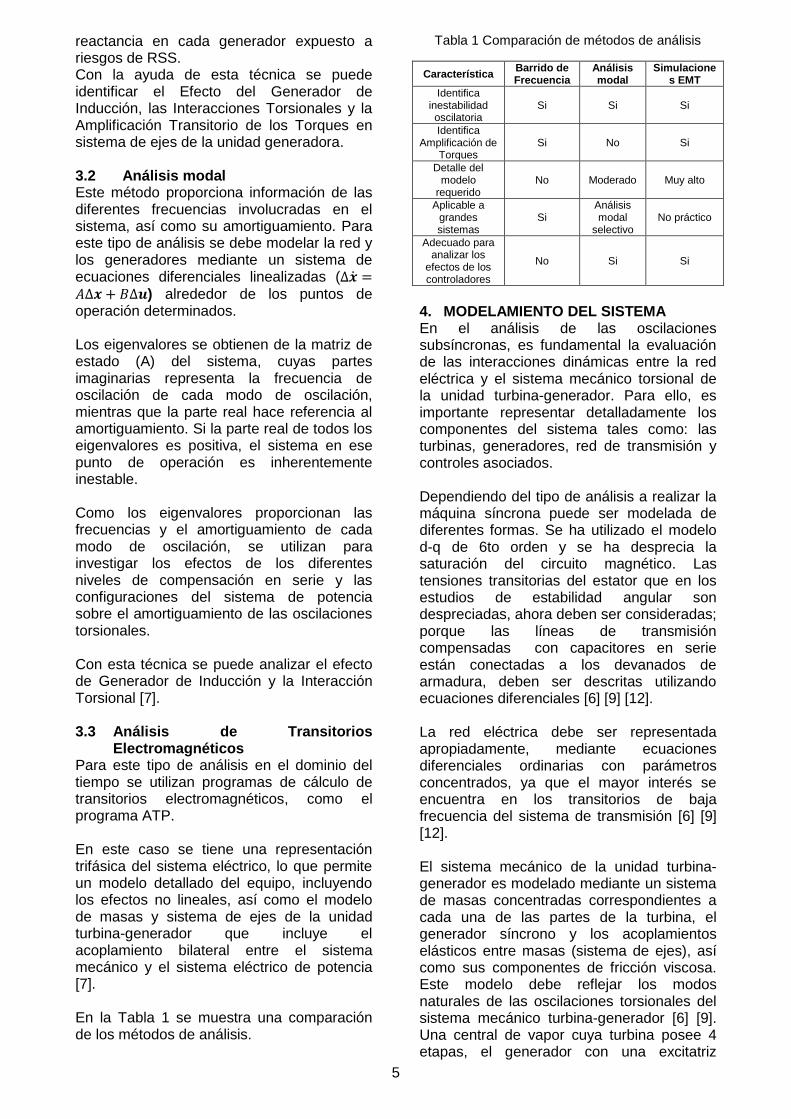
reactancia en cada generador expuesto a riesgos de RSS. Con la ayuda de esta técnica se puede identificar el Efecto del Generador de Inducción, las Interacciones Torsionales y la Amplificación Transitorio de los Torques en sistema de ejes de la unidad generadora. 3.2 Análisis modal Este método proporciona información de las diferentes frecuencias involucradas en el sistema, así como su amortiguamiento. Para este tipo de análisis se debe modelar la red y los generadores mediante un sistema de ecuaciones diferenciales linealizadas (∆�̇� =𝐴∆𝒙 + 𝐵∆𝒖) alrededor de los puntos de operación determinados. Los eigenvalores se obtienen de la matriz de estado (A) del sistema, cuyas partes imaginarias representa la frecuencia de oscilación de cada modo de oscilación, mientras que la parte real hace referencia al amortiguamiento. Si la parte real de todos los eigenvalores es positiva, el sistema en ese punto de operación es inherentemente inestable. Como los eigenvalores proporcionan las frecuencias y el amortiguamiento de cada modo de oscilación, se utilizan para investigar los efectos de los diferentes niveles de compensación en serie y las configuraciones del sistema de potencia sobre el amortiguamiento de las oscilaciones torsionales. Con esta técnica se puede analizar el efecto de Generador de Inducción y la Interacción Torsional [7]. 3.3 Análisis de Transitorios
Electromagnéticos Para este tipo de análisis en el dominio del tiempo se utilizan programas de cálculo de transitorios electromagnéticos, como el programa ATP. En este caso se tiene una representación trifásica del sistema eléctrico, lo que permite un modelo detallado del equipo, incluyendo los efectos no lineales, así como el modelo de masas y sistema de ejes de la unidad turbina-generador que incluye el acoplamiento bilateral entre el sistema mecánico y el sistema eléctrico de potencia [7]. En la Tabla 1 se muestra una comparación de los métodos de análisis.
Tabla 1 Comparación de métodos de análisis
Característica Barrido de Frecuencia
Análisis modal
Simulaciones EMT
Identifica inestabilidad oscilatoria
Si Si Si
Identifica Amplificación de
Torques Si No Si
Detalle del modelo
requerido No Moderado Muy alto
Aplicable a grandes sistemas
Si Análisis modal
selectivo No práctico
Adecuado para analizar los
efectos de los controladores
No Si Si
4. MODELAMIENTO DEL SISTEMA En el análisis de las oscilaciones subsíncronas, es fundamental la evaluación de las interacciones dinámicas entre la red eléctrica y el sistema mecánico torsional de la unidad turbina-generador. Para ello, es importante representar detalladamente los componentes del sistema tales como: las turbinas, generadores, red de transmisión y controles asociados. Dependiendo del tipo de análisis a realizar la máquina síncrona puede ser modelada de diferentes formas. Se ha utilizado el modelo d-q de 6to orden y se ha desprecia la saturación del circuito magnético. Las tensiones transitorias del estator que en los estudios de estabilidad angular son despreciadas, ahora deben ser consideradas; porque las líneas de transmisión compensadas con capacitores en serie están conectadas a los devanados de armadura, deben ser descritas utilizando ecuaciones diferenciales [6] [9] [12]. La red eléctrica debe ser representada apropiadamente, mediante ecuaciones diferenciales ordinarias con parámetros concentrados, ya que el mayor interés se encuentra en los transitorios de baja frecuencia del sistema de transmisión [6] [9] [12]. El sistema mecánico de la unidad turbina-generador es modelado mediante un sistema de masas concentradas correspondientes a cada una de las partes de la turbina, el generador síncrono y los acoplamientos elásticos entre masas (sistema de ejes), así como sus componentes de fricción viscosa. Este modelo debe reflejar los modos naturales de las oscilaciones torsionales del sistema mecánico turbina-generador [6] [9]. Una central de vapor cuya turbina posee 4 etapas, el generador con una excitatriz
6
rotativa, conforma un sistema de seis masas, cuyo modelo resulta de 12vo orden. El modelo del sistema se completa con el regulador de velocidad, con un modelo de 4to orden y el regulador de tensión, mediante un modelo elemental de 3er orden. El modelo resultante resulta de orden 27, que en resumen considera los transitorios del estator de las máquinas síncronas y los transitorios de baja frecuencia de la red eléctrica, y una representación multimasa del eje turbina-generador. En el Anexo A se muestra la formulación del modelo completo. 5. PROGRAMA COMPUTACIONAL DE
ANALISIS MODAL
Para utilizar la herramienta de Análisis Modal es necesario linealizar el modelo descrito en la sección anterior resultando un modelo de espacio estado de orden 27. Para realizar el Análisis Modal de Resonancia Subsíncrona utilizando el modelo linealizado del sistema, se implementó un programa en Matlab. Este programa permite realizar análisis de estabilidad de pequeña señal, calculando los valores y vectores propios de los modos del sistema. También permite realizar análisis de sensibilidad respecto del nivel de compensación serie. La validez del programa desarrollado ha sido comprobada utilizando el First Benchmark Model [3]. En el Anexo B se muestran la verificación de los resultados obtenidos. 6. DIAGNOSTICO DE CASO REAL CON
EL BARRIDO EN FRECUENCIA
En principio se muestran los resultados del análisis del caso real de la Central Térmica Puerto Bravo en el SEIN del Perú utilizando el programa DIgSILENT Power Factory.
Figura 3 Sistema mecánico de la Unidad de
Generación
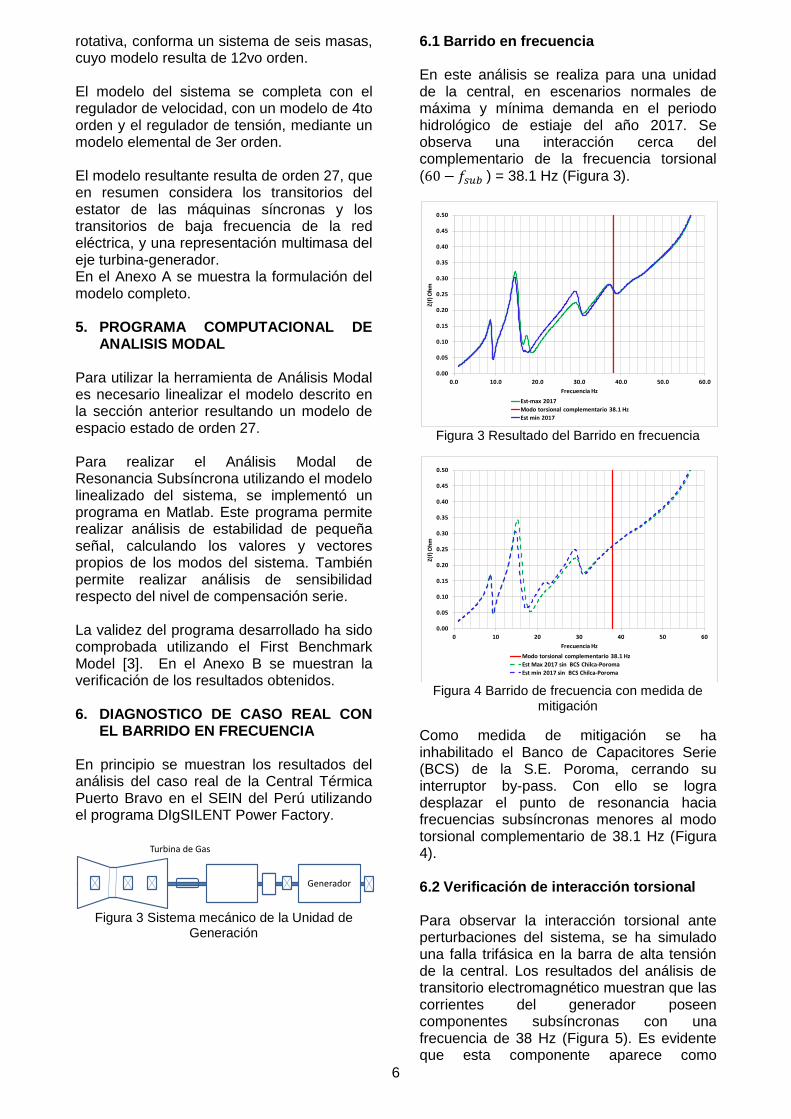
6.1 Barrido en frecuencia
En este análisis se realiza para una unidad de la central, en escenarios normales de máxima y mínima demanda en el periodo hidrológico de estiaje del año 2017. Se observa una interacción cerca del complementario de la frecuencia torsional (60 − 𝑓𝑠𝑢𝑏 ) = 38.1 Hz (Figura 3).
Figura 3 Resultado del Barrido en frecuencia
Figura 4 Barrido de frecuencia con medida de
mitigación
Como medida de mitigación se ha inhabilitado el Banco de Capacitores Serie (BCS) de la S.E. Poroma, cerrando su interruptor by-pass. Con ello se logra desplazar el punto de resonancia hacia frecuencias subsíncronas menores al modo torsional complementario de 38.1 Hz (Figura 4). 6.2 Verificación de interacción torsional
Para observar la interacción torsional ante perturbaciones del sistema, se ha simulado una falla trifásica en la barra de alta tensión de la central. Los resultados del análisis de transitorio electromagnético muestran que las corrientes del generador poseen componentes subsíncronas con una frecuencia de 38 Hz (Figura 5). Es evidente que esta componente aparece como
Turbina de Gas
Generador
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0.40
0.45
0.50
0.0 10.0 20.0 30.0 40.0 50.0 60.0
Z(f)
Oh
m
Frecuencia Hz
Est-max 2017
Modo torsional complementario 38.1 Hz
Est min 2017
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0.40
0.45
0.50
0 10 20 30 40 50 60
Z(f)
Oh
m
Frecuencia Hz
Modo torsional complementario 38.1 Hz
Est Max 2017 sin BCS Chilca-Poroma
Est min 2017 sin BCS Chilca-Poroma

7
consecuencia de la interacción con un modo torsional de 22 Hz.
Figura 5 Corriente en el generador
En la Figura 6 se observa la velocidad angular de tres secciones del sistema mecánico. La velocidad de la sección que presenta una frecuencia de 22 Hz y que es el complemento de la frecuencia de oscilación de 38 Hz de la red eléctrica, tiene amortiguamiento negativo.
Figura 6 Velocidad angular en secciones del
sistema de ejes del turbogenerador
Cuando se incluye la medida de mitigación cerrando el bypass del BCS de la S.E. Poroma, se observa que la corriente subsíncrona de 38 Hz tiene una menor magnitud (Figura 7) y el modo torsional visto en las velocidades angulares del sistema de ejes del turbogenerador ya no presenta amortiguamiento negativo (Figura 8).
Figura 7 Corriente en el generador, con la
inhabilitación del BSC de Poroma
Figura 8 Velocidad angular en secciones del
sistema de ejes del turbogenerador, con la inhabilitación del BSC de Poroma
7. DIAGNOSTICO DE CASO REAL MEDIANTE EL ANÁLISIS MODAL
En primer lugar se muestra la actividad relativa de cada modo en la Figura 9.
Figura 9 Modos Torsionales Subsíncronos
A continuación en la Tabla 2 se muestran los eigenvalores considerando los dos escenarios vistos anteriormente, con el sistema de potencia con bancos de capacitores serie y con la medida de inhabilitar el BCS de la S.E. Poroma.
10.008.006.004.002.000.00 [s]
9.00
6.00
3.00
0.00
-3.00
-6.00
G: Phase Current A in p.u.
1 9 17 25 33 41[Hz]
0.05
0.04
0.03
0.02
0.01
-0.00
G: Fourier-Coefficient, Magnitude, Phase Current A in p.u.
38.000 Hz 0.030 p.u.
DIg
SIL
EN
T
10.008.006.004.002.000.00 [s]
1.013
1.008
1.003
0.998
0.993
0.988
3mass: speed in p.u.
3mass: speed_stateh
3mass: speed_statel
1 9 17 25 33 41[Hz]
0.010
0.008
0.006
0.004
0.002
0.000
3mass: Fourier-Coefficient, Magnitude, speed in p.u.
22.000 Hz 0.008 p.u.
DIg
SIL
EN
T
10.008.006.004.002.000.00 [s]
9.00
6.00
3.00
0.00
-3.00
-6.00
G: Phase Current A in p.u.
1 9 17 25 33 41[Hz]
0.050
0.040
0.030
0.020
0.010
-0.000
G: Fourier-Coefficient, Magnitude, Phase Current A in p.u.
38.000 Hz 0.023 p.u.
DIg
SIL
EN
T
10.008.006.004.002.000.00 [s]
1.013
1.008
1.003
0.998
0.993
0.988
3mass: speed in p.u.
3mass: speed_stateh
3mass: speed_statel
1.160 9.279 17.40 25.52 33.64 41.76[Hz]
0.010
0.008
0.006
0.004
0.002
0.000
3mass: Fourier-Coefficient, Magnitude, speed in p.u.
3mass: Fourier-Coefficient, Magnitude, speed_stateh
3mass: Fourier-Coefficient, Magnitude, speed_statel
22.038 Hz 0.004 p.u.
DIg
SIL
EN
T
8
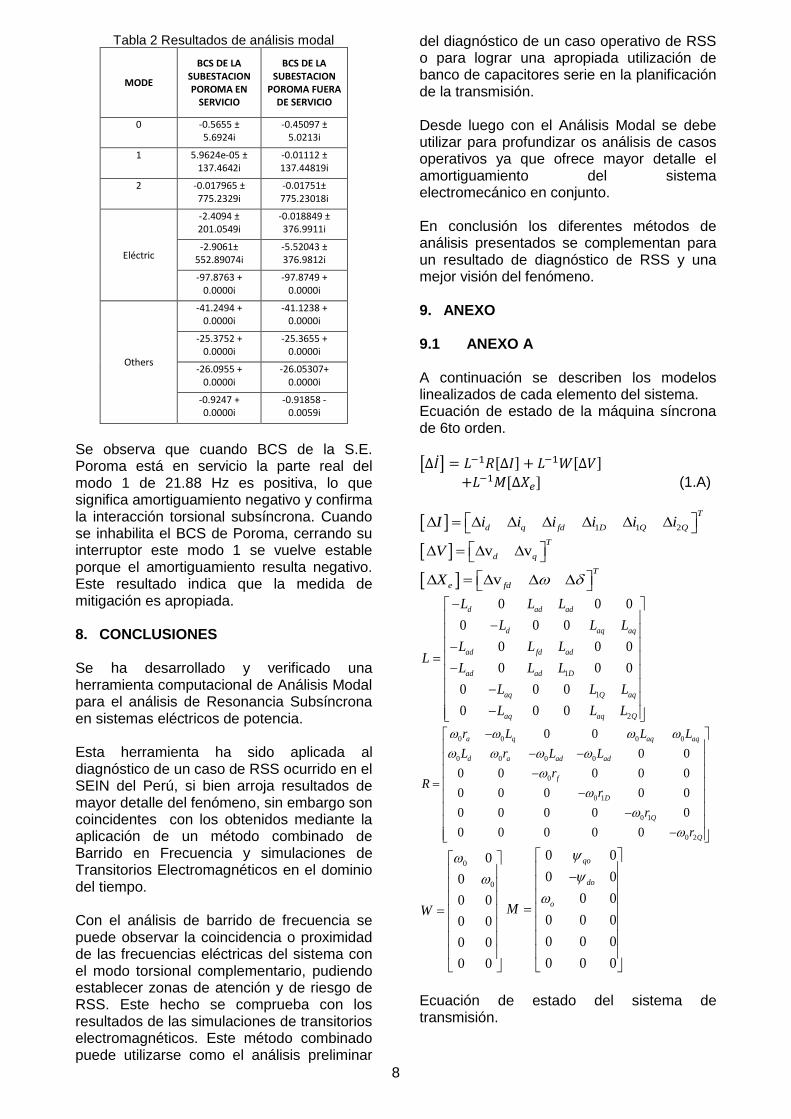
Tabla 2 Resultados de análisis modal
MODE
BCS DE LA SUBESTACION POROMA EN
SERVICIO
BCS DE LA SUBESTACION
POROMA FUERA DE SERVICIO
0 -0.5655 ± 5.6924i
-0.45097 ± 5.0213i
1 5.9624e-05 ± 137.4642i
-0.01112 ± 137.44819i
2 -0.017965 ± 775.2329i
-0.01751± 775.23018i
Eléctric
-2.4094 ± 201.0549i
-0.018849 ± 376.9911i
-2.9061± 552.89074i
-5.52043 ± 376.9812i
-97.8763 + 0.0000i
-97.8749 + 0.0000i
Others
-41.2494 + 0.0000i
-41.1238 + 0.0000i
-25.3752 + 0.0000i
-25.3655 + 0.0000i
-26.0955 + 0.0000i
-26.05307+ 0.0000i
-0.9247 + 0.0000i
-0.91858 - 0.0059i
Se observa que cuando BCS de la S.E. Poroma está en servicio la parte real del modo 1 de 21.88 Hz es positiva, lo que significa amortiguamiento negativo y confirma la interacción torsional subsíncrona. Cuando se inhabilita el BCS de Poroma, cerrando su interruptor este modo 1 se vuelve estable porque el amortiguamiento resulta negativo. Este resultado indica que la medida de mitigación es apropiada. 8. CONCLUSIONES Se ha desarrollado y verificado una herramienta computacional de Análisis Modal para el análisis de Resonancia Subsíncrona en sistemas eléctricos de potencia. Esta herramienta ha sido aplicada al diagnóstico de un caso de RSS ocurrido en el SEIN del Perú, si bien arroja resultados de mayor detalle del fenómeno, sin embargo son coincidentes con los obtenidos mediante la aplicación de un método combinado de Barrido en Frecuencia y simulaciones de Transitorios Electromagnéticos en el dominio del tiempo. Con el análisis de barrido de frecuencia se puede observar la coincidencia o proximidad de las frecuencias eléctricas del sistema con el modo torsional complementario, pudiendo establecer zonas de atención y de riesgo de RSS. Este hecho se comprueba con los resultados de las simulaciones de transitorios electromagnéticos. Este método combinado puede utilizarse como el análisis preliminar
del diagnóstico de un caso operativo de RSS o para lograr una apropiada utilización de banco de capacitores serie en la planificación de la transmisión. Desde luego con el Análisis Modal se debe utilizar para profundizar os análisis de casos operativos ya que ofrece mayor detalle el amortiguamiento del sistema electromecánico en conjunto. En conclusión los diferentes métodos de análisis presentados se complementan para un resultado de diagnóstico de RSS y una mejor visión del fenómeno. 9. ANEXO 9.1 ANEXO A A continuación se describen los modelos linealizados de cada elemento del sistema. Ecuación de estado de la máquina síncrona de 6to orden.
[∆𝐼]̇ = 𝐿−1𝑅[∆𝐼] + 𝐿−1𝑊[∆𝑉]
+𝐿−1𝑀[∆𝑋𝑒] (1.A)
1 1 2
T
d q fd D Q QI i i i i i i
v vT
d qV
vT
e fdX
1
1
2
0 0 0
0 0 0
0 0 0
0 0 0
0 0 0
0 0 0
d ad ad
d aq aq
ad fd ad
ad ad D
aq Q aq
aq aq Q
L L L
L L L
L L LL
L L L
L L L
L L L
0 0 0 0
0 0 0 0
0
0 1
0 1
0 2
0 0
0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
a q aq aq
d a ad ad
f
D
Q
Q
r L L L
L r L L
rR
r
r
r
0
0
0
0
0 0
0 0
0 0
0 0
W
0 0
0 0
0 0
0 0 0
0 0 0
0 0 0
qo
do
oM
Ecuación de estado del sistema de transmisión.

9
0
[ ] [ ]LL Tdq Tdq C e
XV Z I I I p I V P X
(2.A)
v vT
d qV
vT
fdeX
v vd qC C CV
L L
L
L L
R XZ
X R
0
0
0 v cos
0 -v sen
Lqo bo o
Ldo bo o
XI
PX
I
Ecuación de estado del sistema mecánico de ejes del grupo Turbina-Generador.
[∆�̇�𝑚𝑠] = 𝐴𝑚𝑠[∆𝑋𝑚𝑠] + 𝐵𝑚𝑠[∆𝑈𝑚𝑠] (3.A)
[∆𝑋𝑚𝑠] = [∆𝛿𝐸 ∆𝛿 ∆ 𝛿𝐵 ∆𝛿𝐴 ∆𝛿𝐼 ∆𝛿𝐻 …
∆𝜔𝐸 ∆𝜔 ∆𝜔𝐵 ∆𝜔𝐴 ∆𝜔𝐼 ∆𝜔𝐻]𝑇 [∆𝑈𝑚𝑠] = [∆𝑇𝑒 ∆𝑃𝐻 ∆𝑃𝐼 ∆𝑃𝐴]𝑇
𝐴𝑚𝑠 = [06×6 𝐼6×6
𝐴𝑚𝑠1 𝐴𝑚𝑠2]
𝐴𝑚𝑠1 = 𝐴𝑚𝑠2 = Ecuación de estado del regulador de velocidad y de la turbina de 4to orden.
V V
10 0 0
11
0 0
0 0
0 0 0 0
0 01
0 0
g
g
Hg g o
H H moch ch
I I HI
H rh rhA A
A
I co co
TK
C CFT T
P P PT Tp
P PF K
F T TP P
F
F T T
(4.A) Ecuación de estado del sistema de excitación de 3er orden.
10
0 0v v
10
0 01
fdE
E E ad
fd fd
tA A AR R
refA A A A
SB SB
A F ad A
E F fd F E F
KK
T T L
VK K Kp E E
ET T T TE E
K K L K
T T R T T T
(5.A) Las ecuaciones de estado del modelo completo de orden 27° tiene la forma:
[∆𝑋]̇ = 𝐴[∆𝑋] + 𝐵[∆𝑈] (6.A) [∆𝑋] = [∆𝛿𝐸 ∆𝛿 ∆ 𝛿𝐵 ∆𝛿𝐴 ∆𝛿𝐼 ∆𝛿𝐻 … ∆𝜔𝐸 ∆𝜔 ∆𝜔𝐵 ∆𝜔𝐴 ∆𝜔𝐼 ∆𝜔𝐻 … ∆𝐶𝑉 ∆𝑃𝐻 ∆𝑃𝐼 ∆𝑃𝐴 ∆𝑣𝑓𝑑 ∆𝐸𝑅 ∆𝐸𝑆𝐵 …
∆𝑖𝑑 ∆𝑖𝑞 ∆𝑖𝑓𝑑 ∆𝑖1𝐷 ∆𝑖1𝑄 ∆𝑖2𝑄 ∆𝑉𝐶𝑑 ∆𝑉𝐶𝑞
]𝑇
[∆𝑈] = [∆𝑃𝑚𝑜 ∆𝐸𝑟𝑒𝑓]𝑇
9.2 ANEXO B El programa computacional de Análisis Modal implementado en Matlab se verifica obteniendo los modos del First Benchmark Model [3].
Figura 10 Modos Torsionales Subsíncronos del
First Benchmark Model
9.3 ANEXO C Los análisis de transitorios electromagnéticos para el First Benchmark Model [3] fueron realizados con el programa DIgSILENT Power Factory. Se simula un cortocircuito cerca del generador, en la barra de alta tensión y se muestra la evolución en el tiempo de la corriente, que tiene una componente subsíncrona de 40 Hz que interactúa con el segundo modo torsional de 20 Hz. Esta característica se observa en las oscilaciones de la velocidad angular en las secciones del sistema de ejes del turbogenerador en la Figura 12.
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 60
1
2
0 Hz
modo 0
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6-1
0
1
15.7 Hz
modo 1
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6-1
0
1
20.2 Hz
modo 2
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6-1
0
1
25.5 Hz
modo 3
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6-1
0
1
32.3 Hz
modo 4
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6-1
0
1
47.5 Hz
modo 5
A
I
H
e
H
I
A
B
g
H
I
A
B
E
H
I
A
B
E
H
HHmo
H
IH
H
IH
I
IImo
I
IH
I
IHAI
I
AI
A
AAmo
A
AI
A
AIBA
A
BA
B
BBmo
B
BA
B
BAgB
B
gB
g
g
g
gB
g
gBEg
g
Eg
E
E
E
Eg
E
Eg
H
I
A
B
E
H
I
A
B
E
P
P
P
T
H
H
H
H
H
H
DFT
H
K
H
K
H
DFT
H
K
H
KK
H
K
H
DFT
H
K
H
KK
H
K
H
DFT
H
K
H
KK
H
K
H
D
H
K
H
KK
H
K
H
D
H
K
H
K
p
002
10
02
100
2
1000
2
1000
0002
10000
0000
0000
0000
0000
0000
0000
200000
220000
02
0000222
000
002
0000222
00
0002
0000222
0
00002
0000222
000002
000022
100000000000
010000000000
001000000000
000100000000
000010000000
000001000000
0
00
000
000
000
000
00
A
I
H
e
H
I
A
B
g
H
I
A
B
E
H
I
A
B
E
H
HHmo
H
IH
H
IH
I
IImo
I
IH
I
IHAI
I
AI
A
AAmo
A
AI
A
AIBA
A
BA
B
BBmo
B
BA
B
BAgB
B
gB
g
g
g
gB
g
gBEg
g
Eg
E
E
E
Eg
E
Eg
H
I
A
B
E
H
I
A
B
E
P
P
P
T
H
H
H
H
H
H
DFT
H
K
H
K
H
DFT
H
K
H
KK
H
K
H
DFT
H
K
H
KK
H
K
H
DFT
H
K
H
KK
H
K
H
D
H
K
H
KK
H
K
H
D
H
K
H
K
p
002
10
02
100
2
1000
2
1000
0002
10000
0000
0000
0000
0000
0000
0000
200000
220000
02
0000222
000
002
0000222
00
0002
0000222
0
00002
0000222
000002
000022
100000000000
010000000000
001000000000
000100000000
000010000000
000001000000
0
00
000
000
000
000
00
10
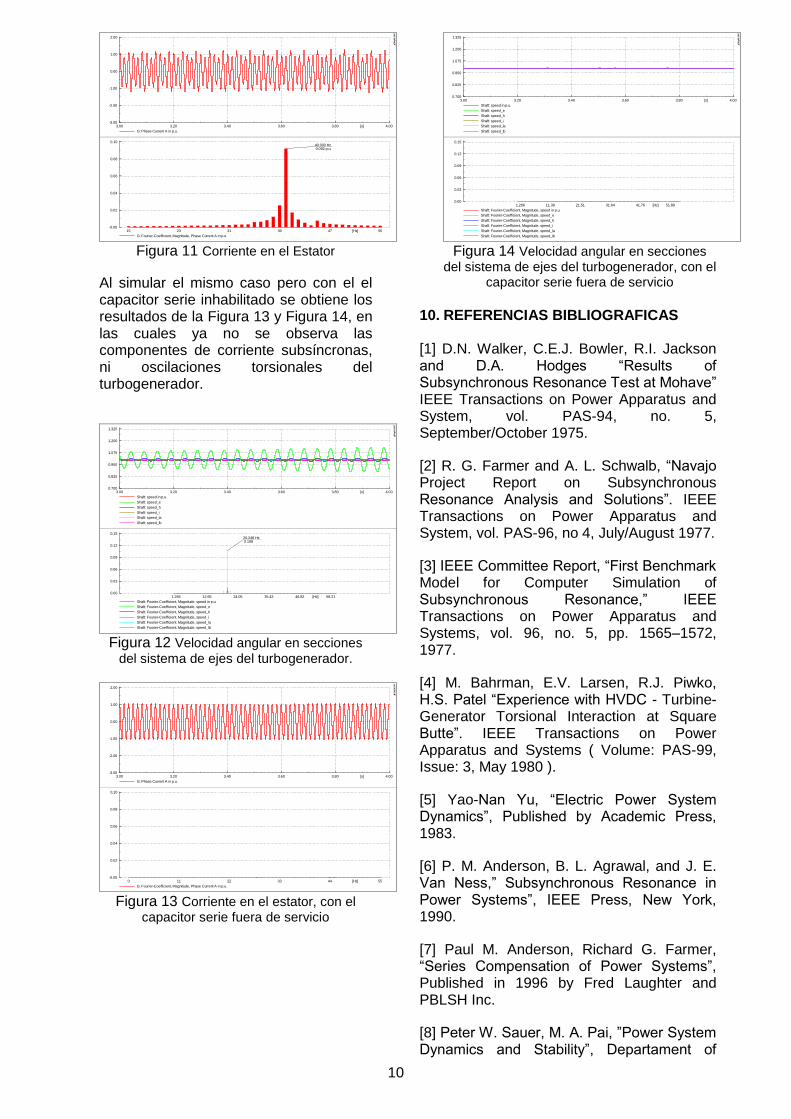
Figura 11 Corriente en el Estator
Al simular el mismo caso pero con el el capacitor serie inhabilitado se obtiene los resultados de la Figura 13 y Figura 14, en las cuales ya no se observa las componentes de corriente subsíncronas, ni oscilaciones torsionales del turbogenerador.
Figura 12 Velocidad angular en secciones
del sistema de ejes del turbogenerador.
Figura 13 Corriente en el estator, con el
capacitor serie fuera de servicio
Figura 14 Velocidad angular en secciones
del sistema de ejes del turbogenerador, con el capacitor serie fuera de servicio
10. REFERENCIAS BIBLIOGRAFICAS [1] D.N. Walker, C.E.J. Bowler, R.I. Jackson and D.A. Hodges “Results of Subsynchronous Resonance Test at Mohave” IEEE Transactions on Power Apparatus and System, vol. PAS-94, no. 5, September/October 1975.
[2] R. G. Farmer and A. L. Schwalb, “Navajo Project Report on Subsynchronous Resonance Analysis and Solutions”. IEEE Transactions on Power Apparatus and System, vol. PAS-96, no 4, July/August 1977.
[3] IEEE Committee Report, “First Benchmark Model for Computer Simulation of Subsynchronous Resonance,” IEEE Transactions on Power Apparatus and Systems, vol. 96, no. 5, pp. 1565–1572, 1977.
[4] M. Bahrman, E.V. Larsen, R.J. Piwko, H.S. Patel “Experience with HVDC - Turbine-Generator Torsional Interaction at Square Butte”. IEEE Transactions on Power Apparatus and Systems ( Volume: PAS-99, Issue: 3, May 1980 ).
[5] Yao-Nan Yu, “Electric Power System Dynamics”, Published by Academic Press, 1983.
[6] P. M. Anderson, B. L. Agrawal, and J. E. Van Ness,” Subsynchronous Resonance in Power Systems”, IEEE Press, New York, 1990.
[7] Paul M. Anderson, Richard G. Farmer, “Series Compensation of Power Systems”, Published in 1996 by Fred Laughter and PBLSH Inc.
[8] Peter W. Sauer, M. A. Pai, ”Power System Dynamics and Stability”, Departament of
4.003.803.603.403.203.00 [s]
2.00
1.00
0.00
-1.00
-2.00
-3.00
G: Phase Current A in p.u.
15 23 31 39 47 55[Hz]
0.10
0.08
0.06
0.04
0.02
-0.00
G: Fourier-Coefficient, Magnitude, Phase Current A in p.u.
40.000 Hz 0.092 p.u.
DIg
SIL
EN
T
4.003.803.603.403.203.00 [s]
1.325
1.200
1.075
0.950
0.825
0.700
Shaft: speed in p.u.
Shaft: speed_e
Shaft: speed_h
Shaft: speed_i
Shaft: speed_la
Shaft: speed_lb
1.266 12.66 24.05 35.43 46.82 58.21[Hz]
0.15
0.12
0.09
0.06
0.03
0.00
Shaft: Fourier-Coefficient, Magnitude, speed in p.u.
Shaft: Fourier-Coefficient, Magnitude, speed_e
Shaft: Fourier-Coefficient, Magnitude, speed_h
Shaft: Fourier-Coefficient, Magnitude, speed_i
Shaft: Fourier-Coefficient, Magnitude, speed_la
Shaft: Fourier-Coefficient, Magnitude, speed_lb
20.248 Hz 0.108
DIg
SIL
EN
T
4.003.803.603.403.203.00 [s]
2.00
1.00
0.00
-1.00
-2.00
-3.00
G: Phase Current A in p.u.
0 11 22 33 44 55[Hz]
0.10
0.08
0.06
0.04
0.02
-0.00
G: Fourier-Coefficient, Magnitude, Phase Current A in p.u.
DIg
SIL
EN
T
4.003.803.603.403.203.00 [s]
1.325
1.200
1.075
0.950
0.825
0.700
Shaft: speed in p.u.
Shaft: speed_e
Shaft: speed_h
Shaft: speed_i
Shaft: speed_la
Shaft: speed_lb
1.266 11.39 21.51 31.64 41.76 51.89[Hz]
0.15
0.12
0.09
0.06
0.03
0.00
Shaft: Fourier-Coefficient, Magnitude, speed in p.u.
Shaft: Fourier-Coefficient, Magnitude, speed_e
Shaft: Fourier-Coefficient, Magnitude, speed_h
Shaft: Fourier-Coefficient, Magnitude, speed_i
Shaft: Fourier-Coefficient, Magnitude, speed_la
Shaft: Fourier-Coefficient, Magnitude, speed_lb
DIg
SIL
EN
T

11
Electrical and Computer Engineering, University of Illinois at Urbana-Champaign by Prentice Hall, 1998.
[9] K. R. Padiyar, “Analysis of Subsynchronous Resonance in Power Systems”, Kluwer Academic Publishers, 1999.
[10] Dr. Daniel H. Baker, Dr. George E. Boukarim, Robert D’Aquila, Richard J. Piwko, “Subsynchronous Resonance Studies and Mitigation Methods for Series Capacitor Applications”, Power Engineering Society Inaugural Conference and Exposition in Africa, 2005 IEEE.
[11] EPRI Technical Report 1013460: “Torsional Interaction between Electrical Network Phenomena and Turbine-Generator Shafts,” November 2006.
[12] Oriane M. Neto a, Donald C. Macdonald, “Analysis of subsynchronous resonance in a multi-machine power system using series compensation” International Journal of Electrical Power & Energy Systems Volume 28, Issue 8, October 2006, Pages 565-569.
[13] EPRI, “Power System Dynamics Tutorial”, Jul 2009.
[14] Garth D. Irwin, Amit K. Jindal, Andrew L. Isaacs, “Sub-Synchronous Control Interactions between Type 3 Wind Turbines and Series Compensated AC Transmission Systems”, IEEE Electranix Corporation, Power and Energy Society General Meeting, 2011 IEEE.
[15] K. Clark , “Overview of Subsynchronous Resonance Related Phenomena”, Transmission and Distribution Conference and Exposition (T&D), 2012 IEEE PES, 27 August 2012.
[16] ESC Electrical Estudies Consultant S.L., “Diagnóstico de Resonancias Subsincrónicas en el SEIN”, Diciembre 2016.





























