Embed Size (px)
Citation preview
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
Commande MPC-LTV d’un réseau PàC/ESS
Imad Eddine Aiteur, Cristina Vlad et Emmanuel Godoy
CentraleSupélec – Laboratoire des Signaux et Systèmes (L2S), Gif sur Yvette,France
GDR CSE, Paris 16/06/2016
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 1/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
Outline
1 Contexte
2 Position du problème
3 Modélisation
4 Stratégie de commande
5 Résultats de simulation
6 Conclusions
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 2/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
Contexte
•Contraintes environnementales :Xutilisation des énergies fossilesXbaisse des réserves de pétroleXpollution due à l’émission du CO2Xpollution sonore
•Utilisation d’énergie électrique :XbatterieXpile à combustible PEMFC : solution potentielle
•Réseaux hétérogènes (multi-sources) :Xsource d’alimentation principale : pile à combustible (PàC) et
auxiliairesXéléments secondaires d’alimentation/stockage : super-capacité,
batterie ...I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 3/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
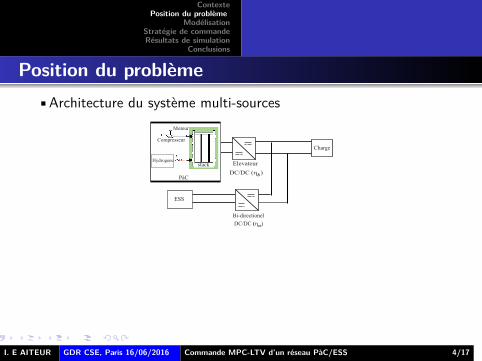
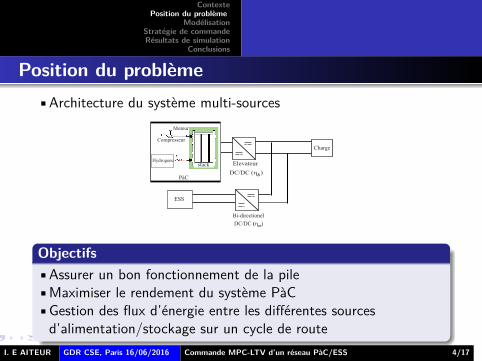
Position du problème•Architecture du système multi-sources
Bi-directionel
DC/DC )(hrp
ESS
Charge
Elevateur
DC/DC ( )hbPàC
stack
Compresseur
Moteur
Hydrogene
Objectifs•Assurer un bon fonctionnement de la pile•Maximiser le rendement du système PàC•Gestion des flux d’énergie entre les différentes sourcesd’alimentation/stockage sur un cycle de route
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 4/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
Position du problème•Architecture du système multi-sources
Bi-directionel
DC/DC )(hrp
ESS
Charge
Elevateur
DC/DC ( )hbPàC
stack
Compresseur
Moteur
Hydrogene
Objectifs•Assurer un bon fonctionnement de la pile•Maximiser le rendement du système PàC•Gestion des flux d’énergie entre les différentes sourcesd’alimentation/stockage sur un cycle de route
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 4/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
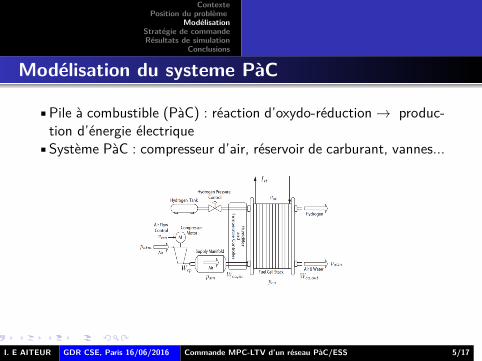
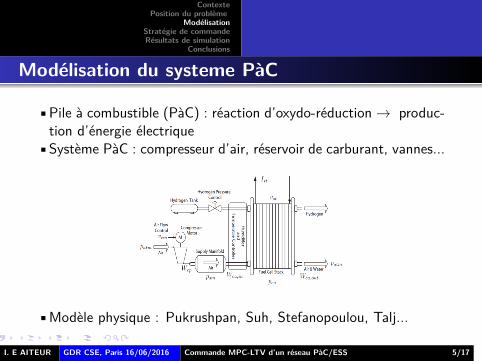
Modélisation du systeme PàC
•Pile à combustible (PàC) : réaction d’oxydo-réduction → produc-tion d’énergie électrique
•Système PàC : compresseur d’air, réservoir de carburant, vannes...
•Modèle physique : Pukrushpan, Suh, Stefanopoulou, Talj...
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 5/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
Modélisation du systeme PàC
•Pile à combustible (PàC) : réaction d’oxydo-réduction → produc-tion d’énergie électrique
•Système PàC : compresseur d’air, réservoir de carburant, vannes...
•Modèle physique : Pukrushpan, Suh, Stefanopoulou, Talj...
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 5/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
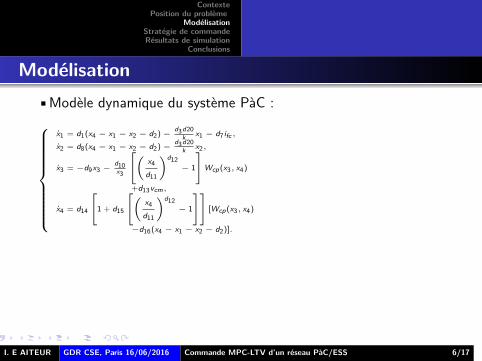
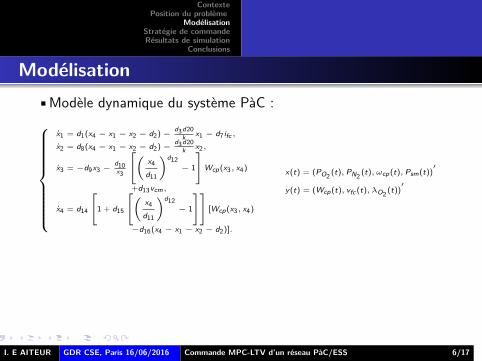
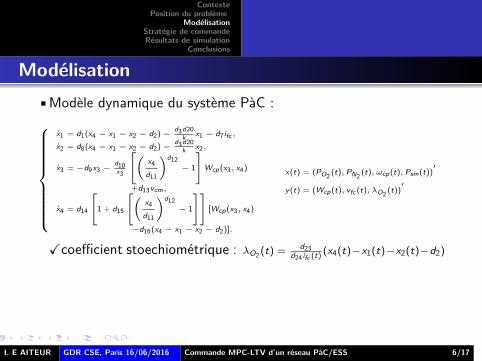
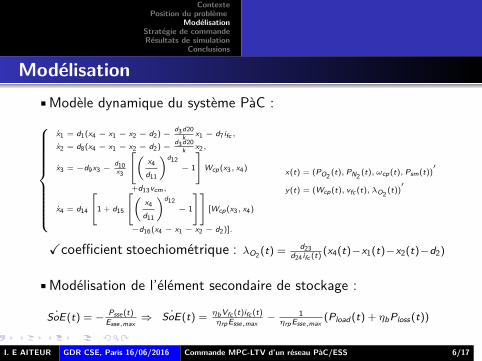
Modélisation•Modèle dynamique du système PàC :
x1 = d1(x4 − x1 − x2 − d2)−d3d20
k x1 − d7 ifc ,x2 = d8(x4 − x1 − x2 − d2)−
d3d20k x2,
x3 = −d9x3 −d10x3
[(x4d11
)d12− 1
]Wcp(x3, x4)
+d13vcm,
x4 = d14
[1 + d15
[(x4d11
)d12− 1
]][Wcp(x3, x4)
−d16(x4 − x1 − x2 − d2)].
x(t) = (PO2 (t), PN2 (t), ωcp(t), Psm(t))′
y(t) = (Wcp(t), vfc (t), λO2 (t))′
Xcoefficient stoechiométrique : λO2 (t) =d23
d24 ifc (t)(x4(t)−x1(t)−x2(t)−d2)
•Modélisation de l’élément secondaire de stockage :
˙SoE(t) = − Psse (t)Esse,max
⇒ ˙SoE(t) = ηbVfc (t)ifc (t)ηrpEsse,max
− 1ηrpEsse,max
(Pload (t) + ηbPloss(t))
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 6/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
Modélisation•Modèle dynamique du système PàC :
x1 = d1(x4 − x1 − x2 − d2)−d3d20
k x1 − d7 ifc ,x2 = d8(x4 − x1 − x2 − d2)−
d3d20k x2,
x3 = −d9x3 −d10x3
[(x4d11
)d12− 1
]Wcp(x3, x4)
+d13vcm,
x4 = d14
[1 + d15
[(x4d11
)d12− 1
]][Wcp(x3, x4)
−d16(x4 − x1 − x2 − d2)].
x(t) = (PO2 (t), PN2 (t), ωcp(t), Psm(t))′
y(t) = (Wcp(t), vfc (t), λO2 (t))′
Xcoefficient stoechiométrique : λO2 (t) =d23
d24 ifc (t)(x4(t)−x1(t)−x2(t)−d2)
•Modélisation de l’élément secondaire de stockage :
˙SoE(t) = − Psse (t)Esse,max
⇒ ˙SoE(t) = ηbVfc (t)ifc (t)ηrpEsse,max
− 1ηrpEsse,max
(Pload (t) + ηbPloss(t))
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 6/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
Modélisation•Modèle dynamique du système PàC :
x1 = d1(x4 − x1 − x2 − d2)−d3d20
k x1 − d7 ifc ,x2 = d8(x4 − x1 − x2 − d2)−
d3d20k x2,
x3 = −d9x3 −d10x3
[(x4d11
)d12− 1
]Wcp(x3, x4)
+d13vcm,
x4 = d14
[1 + d15
[(x4d11
)d12− 1
]][Wcp(x3, x4)
−d16(x4 − x1 − x2 − d2)].
x(t) = (PO2 (t), PN2 (t), ωcp(t), Psm(t))′
y(t) = (Wcp(t), vfc (t), λO2 (t))′
Xcoefficient stoechiométrique : λO2 (t) =d23
d24 ifc (t)(x4(t)−x1(t)−x2(t)−d2)
•Modélisation de l’élément secondaire de stockage :
˙SoE(t) = − Psse (t)Esse,max
⇒ ˙SoE(t) = ηbVfc (t)ifc (t)ηrpEsse,max
− 1ηrpEsse,max
(Pload (t) + ηbPloss(t))
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 6/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
Modélisation•Modèle dynamique du système PàC :
x1 = d1(x4 − x1 − x2 − d2)−d3d20
k x1 − d7 ifc ,x2 = d8(x4 − x1 − x2 − d2)−
d3d20k x2,
x3 = −d9x3 −d10x3
[(x4d11
)d12− 1
]Wcp(x3, x4)
+d13vcm,
x4 = d14
[1 + d15
[(x4d11
)d12− 1
]][Wcp(x3, x4)
−d16(x4 − x1 − x2 − d2)].
x(t) = (PO2 (t), PN2 (t), ωcp(t), Psm(t))′
y(t) = (Wcp(t), vfc (t), λO2 (t))′
Xcoefficient stoechiométrique : λO2 (t) =d23
d24 ifc (t)(x4(t)−x1(t)−x2(t)−d2)
•Modélisation de l’élément secondaire de stockage :
˙SoE(t) = − Psse (t)Esse,max
⇒ ˙SoE(t) = ηbVfc (t)ifc (t)ηrpEsse,max
− 1ηrpEsse,max
(Pload (t) + ηbPloss(t))
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 6/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
Modélisation•Modèle dynamique du système PàC :
x1 = d1(x4 − x1 − x2 − d2)−d3d20
k x1 − d7 ifc ,x2 = d8(x4 − x1 − x2 − d2)−
d3d20k x2,
x3 = −d9x3 −d10x3
[(x4d11
)d12− 1
]Wcp(x3, x4)
+d13vcm,
x4 = d14
[1 + d15
[(x4d11
)d12− 1
]][Wcp(x3, x4)
−d16(x4 − x1 − x2 − d2)].
x(t) = (PO2 (t), PN2 (t), ωcp(t), Psm(t))′
y(t) = (Wcp(t), vfc (t), λO2 (t))′
Xcoefficient stoechiométrique : λO2 (t) =d23
d24 ifc (t)(x4(t)−x1(t)−x2(t)−d2)
•Modélisation de l’élément secondaire de stockage :
˙SoE(t) = − Psse (t)Esse,max
⇒ ˙SoE(t) = ηbVfc (t)ifc (t)ηrpEsse,max
− 1ηrpEsse,max
(Pload (t) + ηbPloss(t))
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 6/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
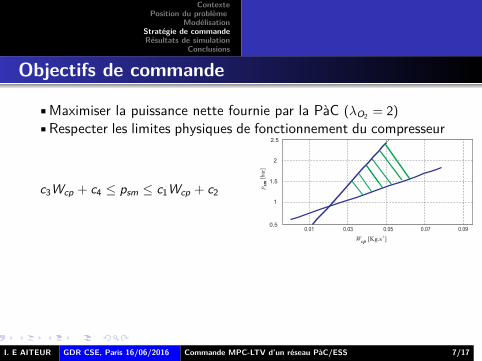
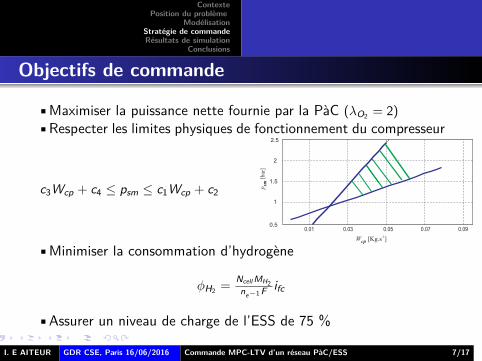
Objectifs de commande
•Maximiser la puissance nette fournie par la PàC (λO2 = 2)•Respecter les limites physiques de fonctionnement du compresseur
c3Wcp + c4 ≤ psm ≤ c1Wcp + c2
0.5
1
1.5
2
2.5
Wcp
[Kg. ]s-1
0.01 0.03 0.05 0.07 0.09
psm
[bar
]
•Minimiser la consommation d’hydrogène
φH2 =Ncell MH2ne−1F ifc
•Assurer un niveau de charge de l’ESS de 75 %
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 7/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
Objectifs de commande
•Maximiser la puissance nette fournie par la PàC (λO2 = 2)•Respecter les limites physiques de fonctionnement du compresseur
c3Wcp + c4 ≤ psm ≤ c1Wcp + c2
0.5
1
1.5
2
2.5
Wcp
[Kg. ]s-1
0.01 0.03 0.05 0.07 0.09
psm
[bar
]
•Minimiser la consommation d’hydrogène
φH2 =Ncell MH2ne−1F ifc
•Assurer un niveau de charge de l’ESS de 75 %
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 7/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
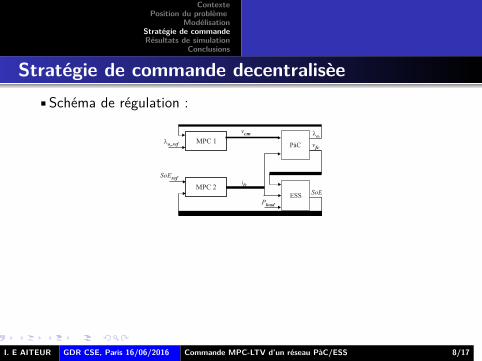
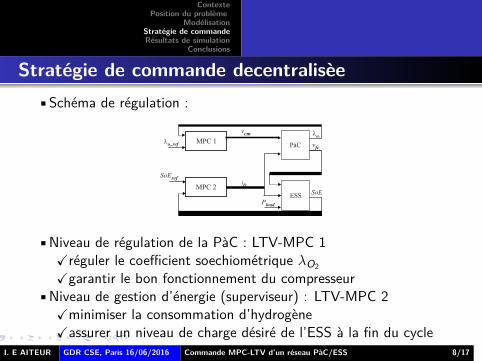
Stratégie de commande decentralisèe•Schéma de régulation :
lovcm
PàC
SoEref
vfc
2
ESS
ifc
lo ,ref2
Pload
SoE
MPC 1
MPC 2
•Niveau de régulation de la PàC : LTV-MPC 1Xréguler le coefficient soechiométrique λO2
Xgarantir le bon fonctionnement du compresseur•Niveau de gestion d’énergie (superviseur) : LTV-MPC 2
Xminimiser la consommation d’hydrogèneXassurer un niveau de charge désiré de l’ESS à la fin du cycle
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 8/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
Stratégie de commande decentralisèe•Schéma de régulation :
lovcm
PàC
SoEref
vfc
2
ESS
ifc
lo ,ref2
Pload
SoE
MPC 1
MPC 2
•Niveau de régulation de la PàC : LTV-MPC 1Xréguler le coefficient soechiométrique λO2
Xgarantir le bon fonctionnement du compresseur•Niveau de gestion d’énergie (superviseur) : LTV-MPC 2
Xminimiser la consommation d’hydrogèneXassurer un niveau de charge désiré de l’ESS à la fin du cycle
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 8/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
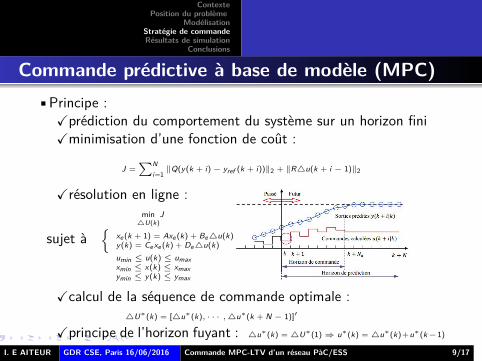
Commande prédictive à base de modèle (MPC)•Principe :
Xprédiction du comportement du système sur un horizon finiXminimisation d’une fonction de cout :
J =∑N
i=1‖Q(y(k + i)− yref (k + i))‖2 + ‖R4u(k + i − 1)‖2
Xrésolution en ligne :min4U(k)
J
sujet à{
xe (k + 1) = Axe (k) + Be4u(k)y(k) = Cexe (k) + De4u(k)umin ≤ u(k) ≤ umaxxmin ≤ x(k) ≤ xmaxymin ≤ y(k) ≤ ymax
Xcalcul de la séquence de commande optimale :4U∗(k) = [4u∗(k), · · · ,4u∗(k + N − 1)]′
Xprincipe de l’horizon fuyant : 4u∗(k) = 4U∗(1)⇒ u∗(k) = 4u∗(k)+u∗(k−1)
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 9/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
Commande prédictive à base de modèle (MPC)•Principe :
Xprédiction du comportement du système sur un horizon finiXminimisation d’une fonction de cout :
J =∑N
i=1‖Q(y(k + i)− yref (k + i))‖2 + ‖R4u(k + i − 1)‖2
Xrésolution en ligne :min4U(k)
J
sujet à{
xe (k + 1) = Axe (k) + Be4u(k)y(k) = Cexe (k) + De4u(k)umin ≤ u(k) ≤ umaxxmin ≤ x(k) ≤ xmaxymin ≤ y(k) ≤ ymax
Xcalcul de la séquence de commande optimale :4U∗(k) = [4u∗(k), · · · ,4u∗(k + N − 1)]′
Xprincipe de l’horizon fuyant : 4u∗(k) = 4U∗(1)⇒ u∗(k) = 4u∗(k)+u∗(k−1)
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 9/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
Commande prédictive à base de modèle (MPC)
•Modèle de prédictionXutilisation d’un modèle du système PàC linéarisé autour d’un
point de fonctionnement ⇒ précision du modèle limitéeXsolution proposée : utilisation d’un modèle linéaire variant
dans le temps (LTV)
•Commande MPC-LTVXlinéarisations successives du modèle non linéaire du systeme
PàC sur l’horizon de prédiction NXpoints de linéarisation appartenant à une trajectoire du modèle
non linéaireXrésolution du problème d’optimisation en utilisant un ensemble
de N modèles linéaires différents
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 10/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
Commande prédictive à base de modèle (MPC)
•Modèle de prédictionXutilisation d’un modèle du système PàC linéarisé autour d’un
point de fonctionnement ⇒ précision du modèle limitéeXsolution proposée : utilisation d’un modèle linéaire variant
dans le temps (LTV)
•Commande MPC-LTVXlinéarisations successives du modèle non linéaire du systeme
PàC sur l’horizon de prédiction NXpoints de linéarisation appartenant à une trajectoire du modèle
non linéaireXrésolution du problème d’optimisation en utilisant un ensemble
de N modèles linéaires différentsI. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 10/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
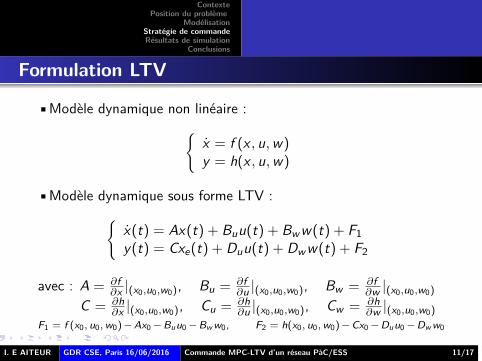
Formulation LTV
•Modèle dynamique non linéaire :{x = f (x , u,w)y = h(x , u,w)
•Modèle dynamique sous forme LTV :{x(t) = Ax(t) + Buu(t) + Bw w(t) + F1y(t) = Cxe(t) + Duu(t) + Dw w(t) + F2
avec : A = ∂f∂x |(x0,u0,w0), Bu = ∂f
∂u |(x0,u0,w0), Bw = ∂f∂w |(x0,u0,w0)
C = ∂h∂x |(x0,u0,w0), Cu = ∂h
∂u |(x0,u0,w0), Cw = ∂h∂w |(x0,u0,w0)
F1 = f (x0, u0,w0)−Ax0−Buu0−Bw w0, F2 = h(x0, u0,w0)−Cx0−Duu0−Dw w0
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 11/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
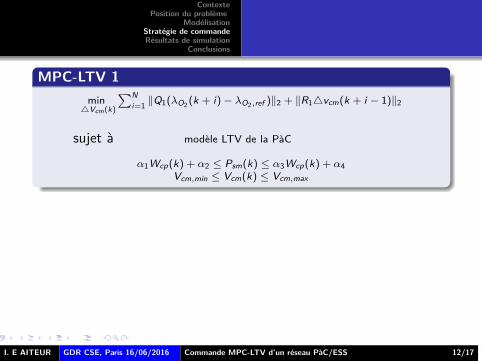
MPC-LTV 1min4Vcm(k)
∑Ni=1 ‖Q1(λO2 (k + i)− λO2,ref )‖2 + ‖R14vcm(k + i − 1)‖2
sujet à modèle LTV de la PàC
α1Wcp(k) + α2 ≤ Psm(k) ≤ α3Wcp(k) + α4Vcm,min ≤ Vcm(k) ≤ Vcm,max
MPC-LTV 2min4Ifc (k)
∑Ni=1 ‖Q2(SoE(k + i)− SoEref )‖2 + ‖R24ifc(k + i − 1)‖2 + ‖S2ifc(k + i − 1)‖2
sujet à modèle LTV de l’ESS
ifc,min ≤ ifc(k) ≤ ifc,max
SoEmin ≤ SoE(k) ≤ SoEmax
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 12/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
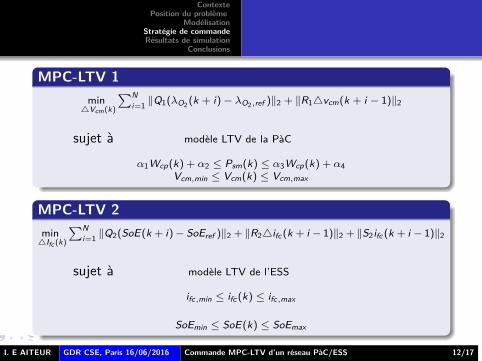
MPC-LTV 1min4Vcm(k)
∑Ni=1 ‖Q1(λO2 (k + i)− λO2,ref )‖2 + ‖R14vcm(k + i − 1)‖2
sujet à modèle LTV de la PàC
α1Wcp(k) + α2 ≤ Psm(k) ≤ α3Wcp(k) + α4Vcm,min ≤ Vcm(k) ≤ Vcm,max
MPC-LTV 2min4Ifc (k)
∑Ni=1 ‖Q2(SoE(k + i)− SoEref )‖2 + ‖R24ifc(k + i − 1)‖2 + ‖S2ifc(k + i − 1)‖2
sujet à modèle LTV de l’ESS
ifc,min ≤ ifc(k) ≤ ifc,max
SoEmin ≤ SoE(k) ≤ SoEmax
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 12/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
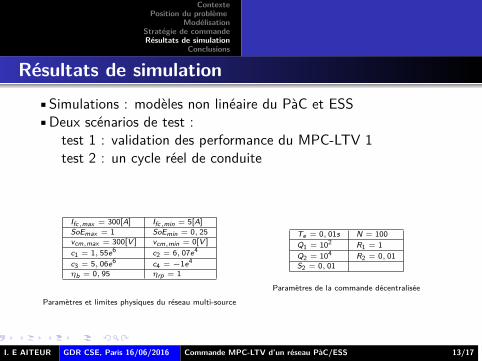
Résultats de simulation•Simulations : modèles non linéaire du PàC et ESS•Deux scénarios de test :
test 1 : validation des performance du MPC-LTV 1test 2 : un cycle réel de conduite
Ifc,max = 300[A] Ifc,min = 5[A]
SoEmax = 1 SoEmin = 0, 25vcm,max = 300[V ] vcm,min = 0[V ]
c1 = 1, 55e6 c2 = 6, 07e4
c3 = 5, 06e6 c4 = −1e4ηb = 0, 95 ηrp = 1
Paramètres et limites physiques du réseau multi-source
Te = 0, 01s N = 100Q1 = 102 R1 = 1Q2 = 104 R2 = 0, 01S2 = 0, 01
Paramètres de la commande décentralisée
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 13/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
Résultats de simulation•Simulations : modèles non linéaire du PàC et ESS•Deux scénarios de test :
test 1 : validation des performance du MPC-LTV 1test 2 : un cycle réel de conduite
Ifc,max = 300[A] Ifc,min = 5[A]
SoEmax = 1 SoEmin = 0, 25vcm,max = 300[V ] vcm,min = 0[V ]
c1 = 1, 55e6 c2 = 6, 07e4
c3 = 5, 06e6 c4 = −1e4ηb = 0, 95 ηrp = 1
Paramètres et limites physiques du réseau multi-source
Te = 0, 01s N = 100Q1 = 102 R1 = 1Q2 = 104 R2 = 0, 01S2 = 0, 01
Paramètres de la commande décentralisée
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 13/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
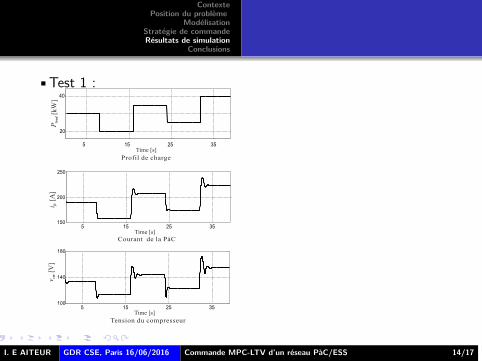
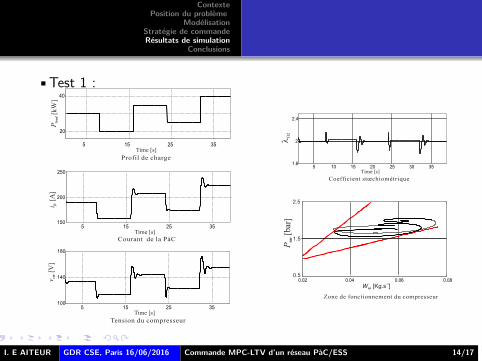
•Test 1 :
5 15 25 35
Time [s]
Plo
ad
[kW
]
40
20
Profil de charge
150
200
250
5 15 25 35
Time [s]
i fc[A
]
Courant de la PàC
100
140
180
5 15 25 35
Time [s]
Tension du compresseur
vcm
[V]
5 10 15 20 25 30 351.6
2
2.4
Time [s]
Coefficient stœchiométrique
lO
2
Zone de fonctionnement du compresseur
Wcp
[Kg. ]s-1
0.02 0.04 0.06 0.080.5
1.5
2.5
Psm
[bar
]
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 14/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
•Test 1 :
5 15 25 35
Time [s]
Plo
ad
[kW
]
40
20
Profil de charge
150
200
250
5 15 25 35
Time [s]
i fc[A
]
Courant de la PàC
100
140
180
5 15 25 35
Time [s]
Tension du compresseur
vcm
[V]
5 10 15 20 25 30 351.6
2
2.4
Time [s]
Coefficient stœchiométrique
lO
2
Zone de fonctionnement du compresseur
Wcp
[Kg. ]s-1
0.02 0.04 0.06 0.080.5
1.5
2.5
Psm
[bar
]
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 14/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
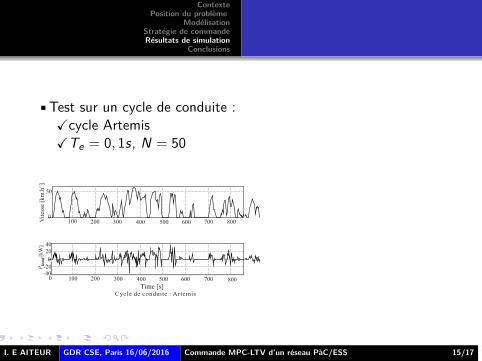
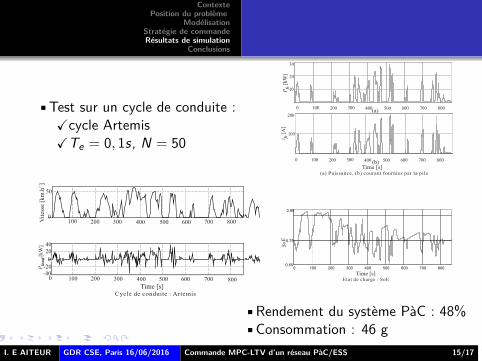
•Test sur un cycle de conduite :Xcycle ArtemisXTe = 0, 1s, N = 50
Time [s]
Vit
esse
[k
m.h
]-1
50
800700600500400300200100
800700600500400300200100
40
20
-20-40
0
Cycle de conduite : Artemis
0
Plo
ad
[kW
]
0
Time [s]
i fc[A
]
200
100
8007006005004003002001000
8007006005004003002001000
Pfc
[kW
]
10
20
30
(a) Puissance, (b) courant fournies par la pile
(a)
(b)
0 100 200 300 400 500 600 700 8000.55
0.75
0.95
Time [s]
SoE
Etat de charge : SoE
•Rendement du système PàC : 48%•Consommation : 46 g
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 15/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
•Test sur un cycle de conduite :Xcycle ArtemisXTe = 0, 1s, N = 50
Time [s]
Vit
esse
[k
m.h
]-1
50
800700600500400300200100
800700600500400300200100
40
20
-20-40
0
Cycle de conduite : Artemis
0
Plo
ad
[kW
]
0
Time [s]
i fc[A
]
200
100
8007006005004003002001000
8007006005004003002001000
Pfc
[kW
]
10
20
30
(a) Puissance, (b) courant fournies par la pile
(a)
(b)
0 100 200 300 400 500 600 700 8000.55
0.75
0.95
Time [s]
SoE
Etat de charge : SoE
•Rendement du système PàC : 48%•Consommation : 46 g
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 15/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
Conclusions•Application d’une stratégie de commande et de gestiond’énergie décentralisée
•Approche MPC-LTV:Xmodèle dynamique de la PàCXcontraintes physiques
•Résultats acceptables en terme de:Xrendement du système PàCXconsommation d’hydrogène
Perspectives•Réduction de la complexité de l’algorithme de commandeMPC-LTV•Validation expérimentale de la stratégie de commande•Évaluer le rendement de la PàC en considérant d’autre stratégies
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 16/17
ContextePosition du problème
ModélisationStratégie de commandeRésultats de simulation
Conclusions
Merci de votre attention
I. E AITEUR/ GDR CSE, Paris 16/06/2016 / Commande MPC-LTV d’un réseau PàC/ESS 17/17




























