Embed Size (px)
Citation preview
Plan du cours
Principe de la commande prédictive : rappel
Elaboration de la commande : étapes de synthèse de la loi de commande, principe de l’horizon fuyant
Prise en compte de contraintes
Avantages et défis
Commande prédictive sans contraintes
Approche GPC (Commande Prédictive Généralisée)
Cas d’étude
Commande prédictive avec contraintes
Approche MPC (Model Predictive Control)
Cas d’étude
Faisabilité et stabilité
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS2
Plan du cours
Principe de la commande prédictive : rappel
Elaboration de la commande : étapes de synthèse de la loi de commande, principe de l’horizon fuyant
Prise en compte de contraintes
Avantages et défis
Commande prédictive sans contraintes
Approche GPC (Commande Prédictive Généralisée)
Cas d’étude
Commande prédictive avec contraintes
Approche MPC (Model Predictive Control)
Cas d’étude
Faisabilité et stabilité
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS3
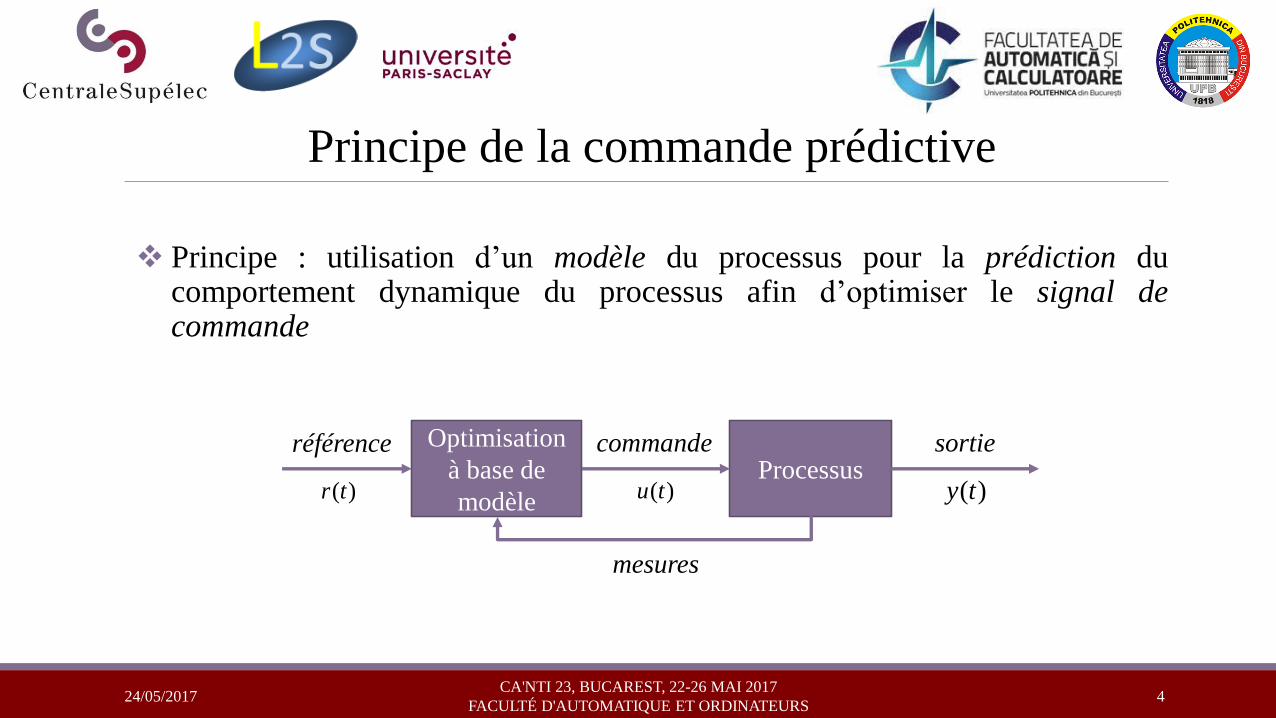
Principe : utilisation d’un modèle du processus pour la prédiction ducomportement dynamique du processus afin d’optimiser le signal decommande
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS4
Principe de la commande prédictive
Optimisation
à base de
modèle
Processus )(tr
référence
)(tu )(ty
commande sortie
mesures
Élaboration de la commande
Choix d’un modèle numérique du processus sur lequel est fondée la prédiction de la sortie(fonction de transfert, représentation d’état)
Formulation d’un critère de performance à partir des objectifs de la commande
suivie de trajectoire, erreur statique nulle …
Choix des paramètres de réglage (horizon de prédiction, horizon de commande,pondérations)
À chaque pas d’échantillonnage :
résoudre un problème d’optimisation à horizon finit
obtenir une séquence de commande futures en boucle ouverte par minimisation d’unefonction de coût sur un horizon fini
appliquer au processus la première valeur de la séquence de commande optimale
réitération à la période d’échantillonnage suivante : stratégie de l’horizon fuyant
structure de commande en boucle fermée
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS5
Principe de la commande prédictive
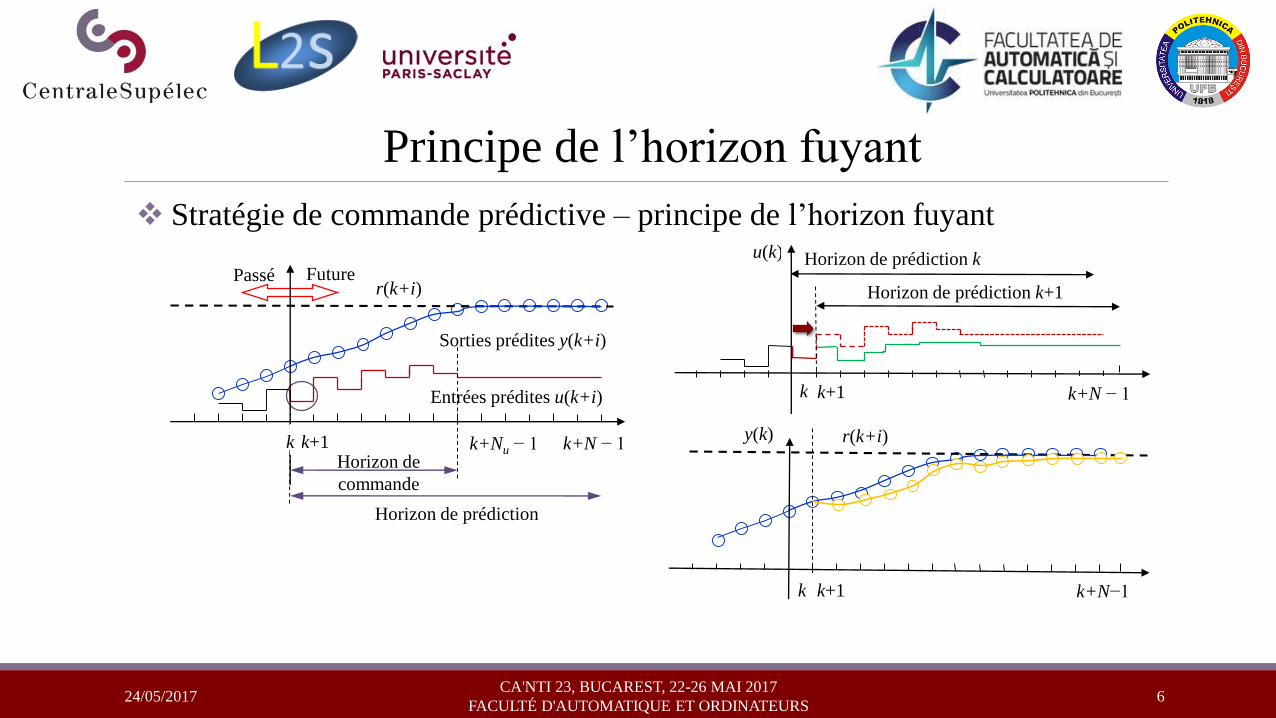
Stratégie de commande prédictive – principe de l’horizon fuyant
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS6
Principe de l’horizon fuyant
Horizon de
commande
Horizon de prédiction
FuturePassé
k+1 k+N − 1
Sorties prédites y(k+i)
Entrées prédites u(k+i) k+1 k+N − 1
k+1 k+N−1
y(k)
u(k)
Horizon de prédiction k+1
Horizon de prédiction k
k
k
r(k+i)k
r(k+i)
k+Nu − 1
Aspects importants
Choix large du modèle de prédiction : linéaire/non-linéarie, monovariable/multivariable,à retard
Formulation des différents objectifs
Effet anticipatif : technique bien adaptée pour des problèmes de suivi de trajectoire
Méthode systématique de manipulation des contraintes
Défis
Implantation : résolution en temps-réel (< période d’échantillonnage du système) avec latechnologie disponible (capacité de stockage, processeur…)
Stabilité : convergence (stabilité en boucle fermée) pas garantie automatiquement
Robustesse : vis-à-vis des incertitudes et perturbations
Faisabilité : possibilité d’insatisfaction des contraintes à un certain instant de temps futur
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS7
Avantages et défis de la commande prédictive
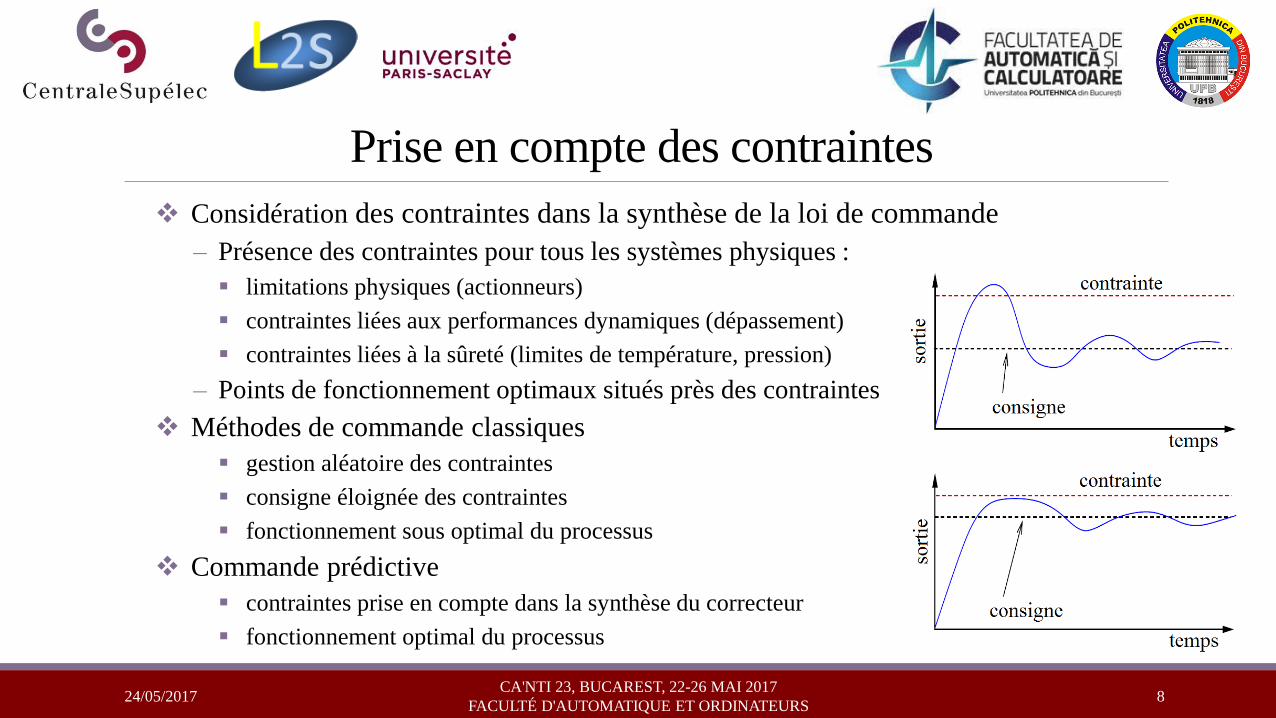
Prise en compte des contraintes
Considération des contraintes dans la synthèse de la loi de commande
‒ Présence des contraintes pour tous les systèmes physiques :
limitations physiques (actionneurs)
contraintes liées aux performances dynamiques (dépassement)
contraintes liées à la sûreté (limites de température, pression)
‒ Points de fonctionnement optimaux situés près des contraintes
Méthodes de commande classiques
gestion aléatoire des contraintes
consigne éloignée des contraintes
fonctionnement sous optimal du processus
Commande prédictive
contraintes prise en compte dans la synthèse du correcteur
fonctionnement optimal du processus
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS8
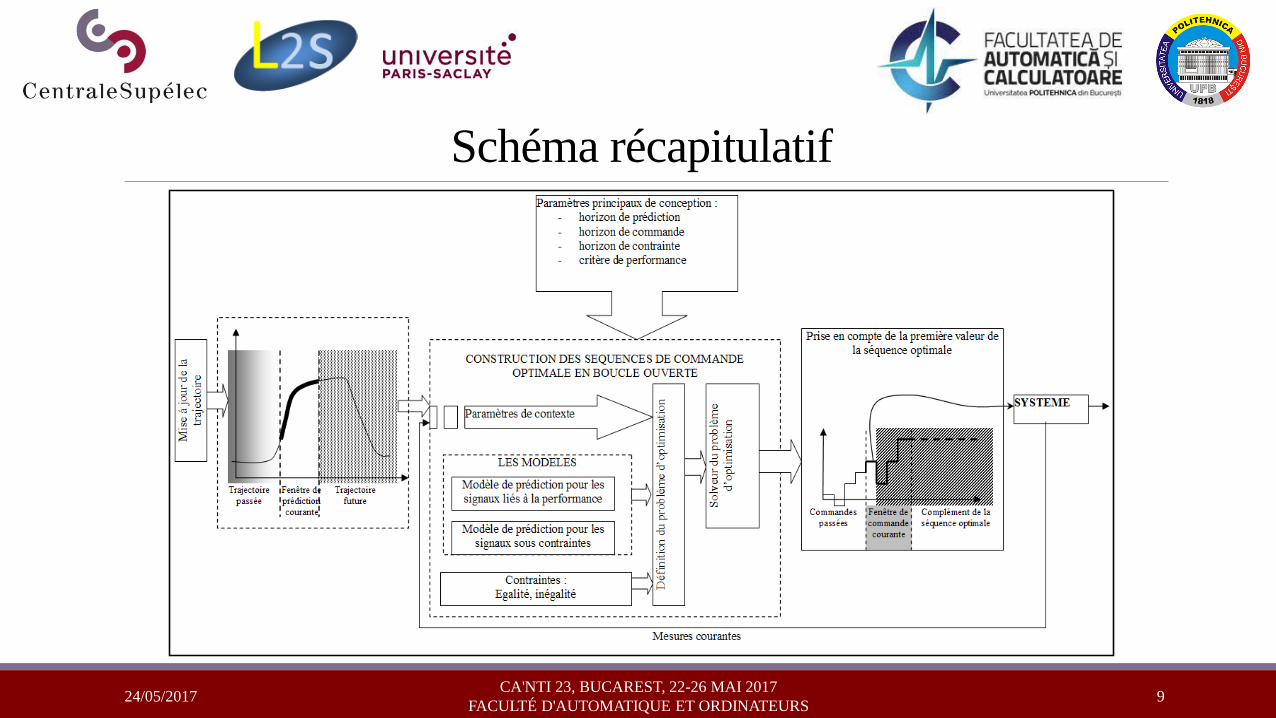
Schéma récapitulatif
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS9
Prise en compte des contraintes
Comparaison avec les lois de commande classiques
Boucle de réglage d’un système SISO sous contraintes : performanceséquivalentes avec des stratégies de commande simples (PID + anti-windup)
Commande prédictive
Formalisme général pour des problèmes différentes
réduit la coût de maintenance
gestion plus facile de la conception de la commande
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS10
Plan du cours
Principe de la commande prédictive : rappel
Elaboration de la commande : étapes de synthèse de la loi de commande, principe de l’horizon fuyant
Prise en compte de contraintes
Avantages et défis
Commande prédictive sans contraintes
Approche GPC (Commande Prédictive Généralisée)
Cas d’étude
Commande prédictive avec contraintes
Approche MPC (Model Predictive Control)
Cas d’étude
Faisabilité et stabilité
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS11
Approche GPC
Modèle numérique
Définition du modèle sous forme CARIMA (Controlled AutoRegressive IntegratedMoving Average)
Cette structure apporte un terme intégrateur dans la loi de commande et garantitl’annulation de toute erreur statique vis à vis de consigne ou de perturbation constante
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS12
)(
)()()1()()()(
1
111
q
kqCkuqBkyqA
onperturbati de polynôme )(
centré blancbruit )(
temporelretardopérateur , 1)(
)(
1)( : avec
1
111
2
2
1
10
1
2
2
1
1
1
qC
k
qqq
qbqbqbbqB
qaqaqaqA
b
b
a
a
n
n
n
n
Approche GPC
Fonction de coût quadratique
Comprenant des termes portant sur les erreurs de prédiction dans le futur et lesincréments de commandes futures
Quatre paramètres doivent être choisis par l’utilisateur
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS13
uN
i
N
Nir ikuikyikyJ
1
22 ))1(())()(ˆ(2
1
uNiiku pour 0)( : hypothèsel' sous
commande lasur n pondératio defacteur
commande lasur prédiction dehorizon
supérieur prédiction dehorizon
inférieur prédiction dehorizon
2
1
uN
N
N
Approche GPC
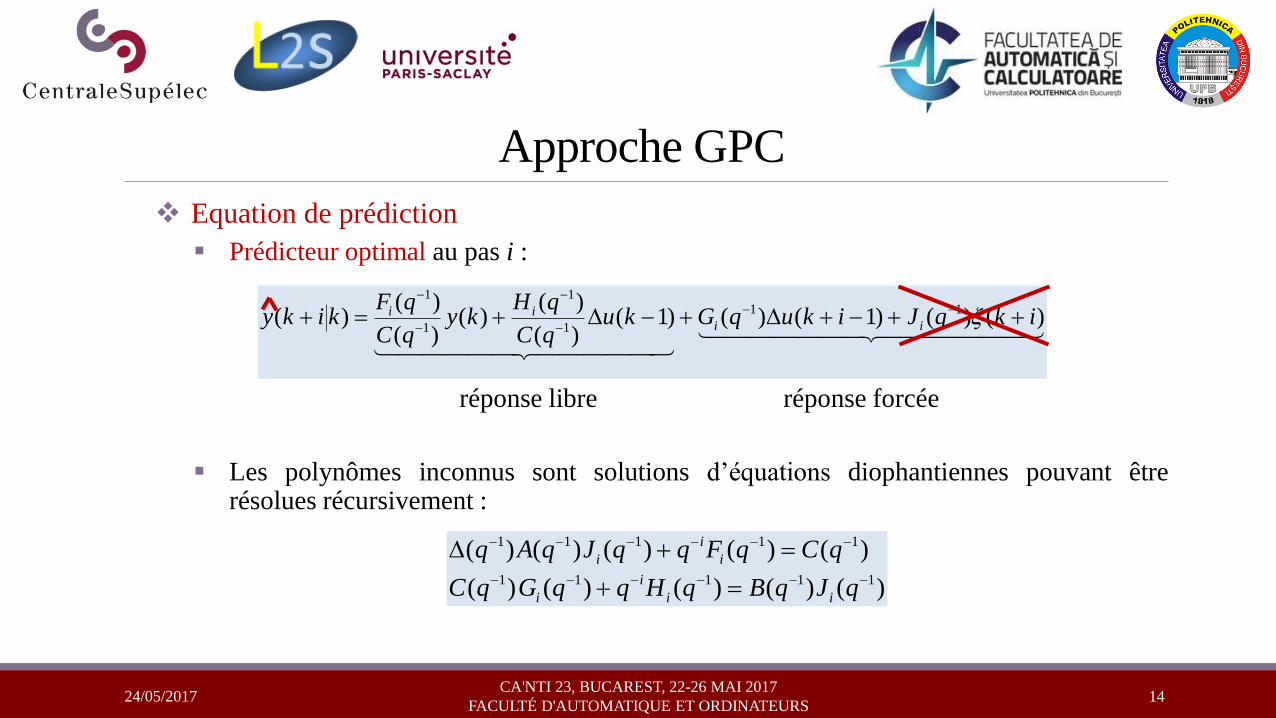
Equation de prédiction
Prédicteur optimal au pas i :
réponse libre réponse forcée
Les polynômes inconnus sont solutions d’équations diophantiennes pouvant êtrerésolues récursivement :
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS14
)()()1()( )1()(
)()(
)(
)()( 11
1
1
1
1
ikqJikuqGkuqC
qHky
qC
qFkiky ii
ii
)()()()()(
)()()()()(11111
11111
qJqBqHqqGqC
qCqFqqJqAq
ii
i
i
i
i
i
Approche GPC
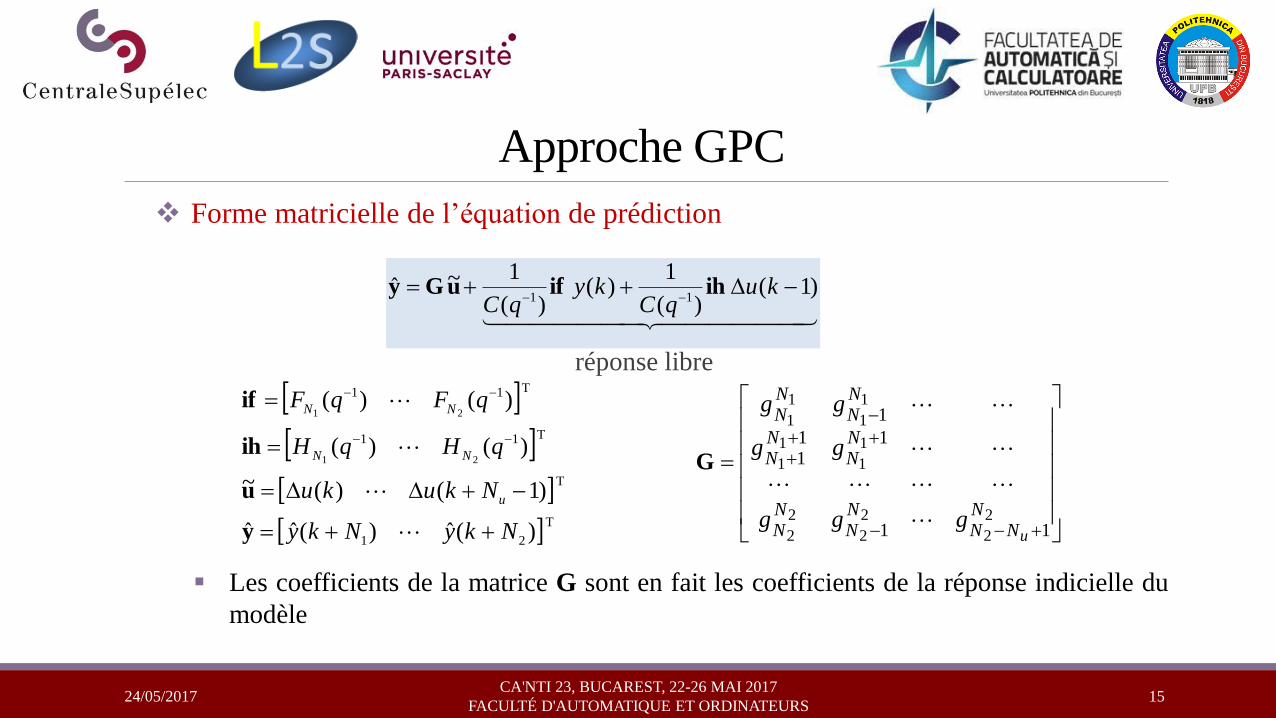
Forme matricielle de l’équation de prédiction
réponse libre
Les coefficients de la matrice G sont en fait les coefficients de la réponse indicielle du
modèle
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS15
)1( )(
1)(
)(
1~ˆ11
kuqC
kyqC
ihifuGy
2
2
2
2
2
2
1
1
1
1
1
1
1
1
11
111
1
NNN
NN
NN
NN
NN
NN
NN
uggg
gg
gg
G
T
21
T
T11
T11
)(ˆ)(ˆˆ
)1()(~
)()(
)()(
21
21
NkyNky
Nkuku
qHqH
qFqF
u
NN
NN
y
u
ih
if
Approche GPC
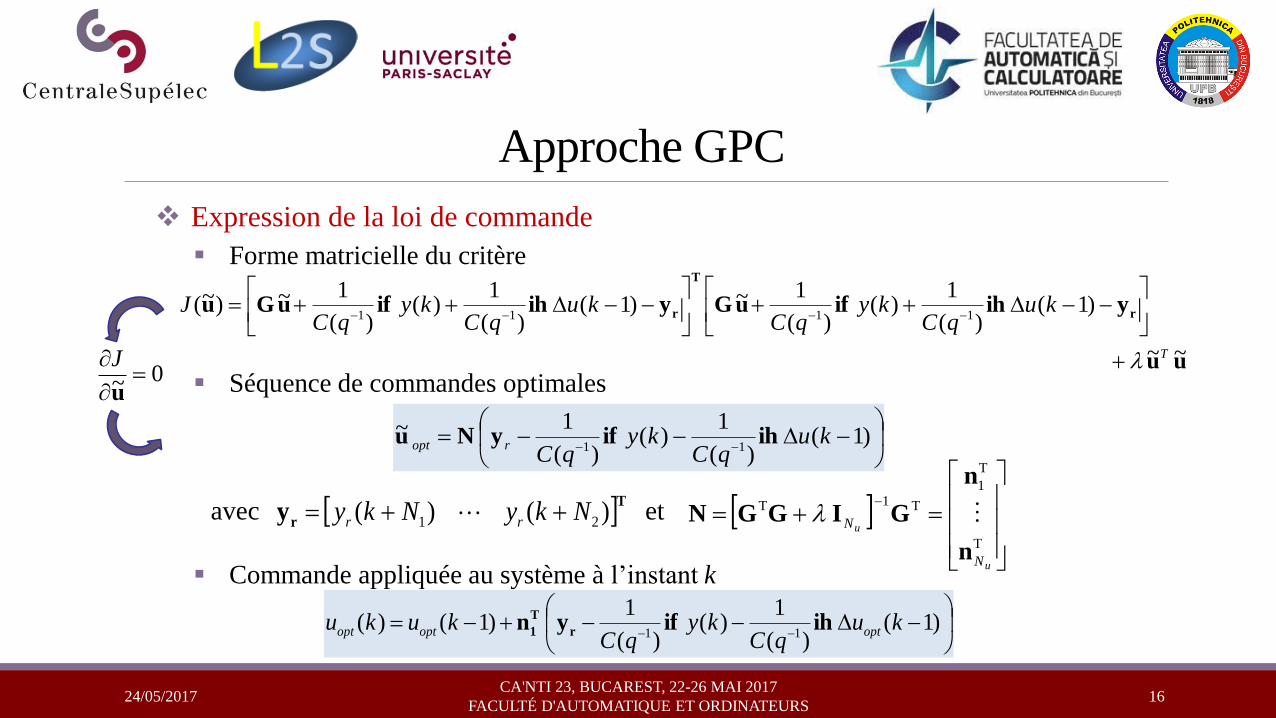
Expression de la loi de commande
Forme matricielle du critère
Séquence de commandes optimales
avec et
Commande appliquée au système à l’instant k
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS16
uu
y ih ifuGy ih ifuGur
T
r
~~
)1()(
1)(
)(
1~)1()(
1)(
)(
1~)~(1111
T
kuqC
kyqC
kuqC
kyqC
J
)1(
)(
1)(
)(
1 ~
11 kuqC
kyqC
ropt ihifyNu
Tr
y )()( 21 NkyNky rr
T
T
1
T1T
u
u
N
N
n
n
GIGGN
)1(
)(
1)(
)(
1)1()(
11ku
qCky
qCkuku optoptopt ih ify n
r
T
1
0~
u
J
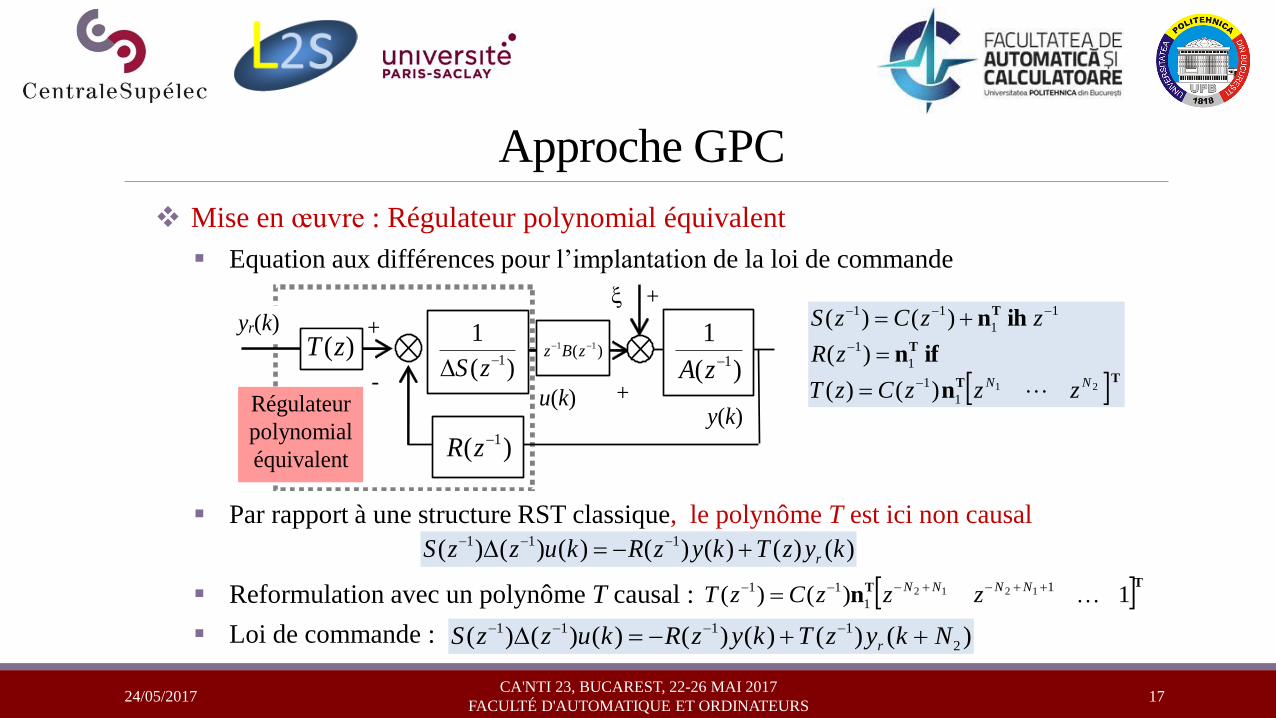
Approche GPC
Mise en œuvre : Régulateur polynomial équivalent
Equation aux différences pour l’implantation de la loi de commande
Par rapport à une structure RST classique, le polynôme T est ici non causal
Reformulation avec un polynôme T causal :
Loi de commande :
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS17
+
+
+
-
yr(k)
u(k) y(k)
)(
11
zS
)(
11 zBz
)(
11
zA
Régulateur
polynomial
équivalent
)(zT
)( 1zR
TT
T
T
n
if n
ih n
21
1
1
1
1
1
1
11
)()(
)(
)()(
NNzzzCzT
zR
zzCzS
)()()()()()()( 111 kyzTkyzRkuzzS r
TTn 1)()(
1
1
11 1212 NNNN
zzzCzT
)()()()()()()( 2
1111 NkyzTkyzRkuzzS r
Approche GPC
Programmation hors ligne
Définition de la consigne (stockage point par point)
Choix d’une période d’échantillonnage et définition des polynômes A et B du
modèle CARIMA (par identification préalable si nécessaire)
Choix des paramètres de réglage de la fonction de coût
Calcul des prédicteurs optimaux par résolution des équations diophantiennes
Synthèse des polynômes R, S et T du régulateur équivalent
Boucle temps réel
Acquisition de la sortie
Calcul de la commande par équation aux différences
Envoi de la commande
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS18
Boucle temps réel très
rapide (moins de 200 ms)
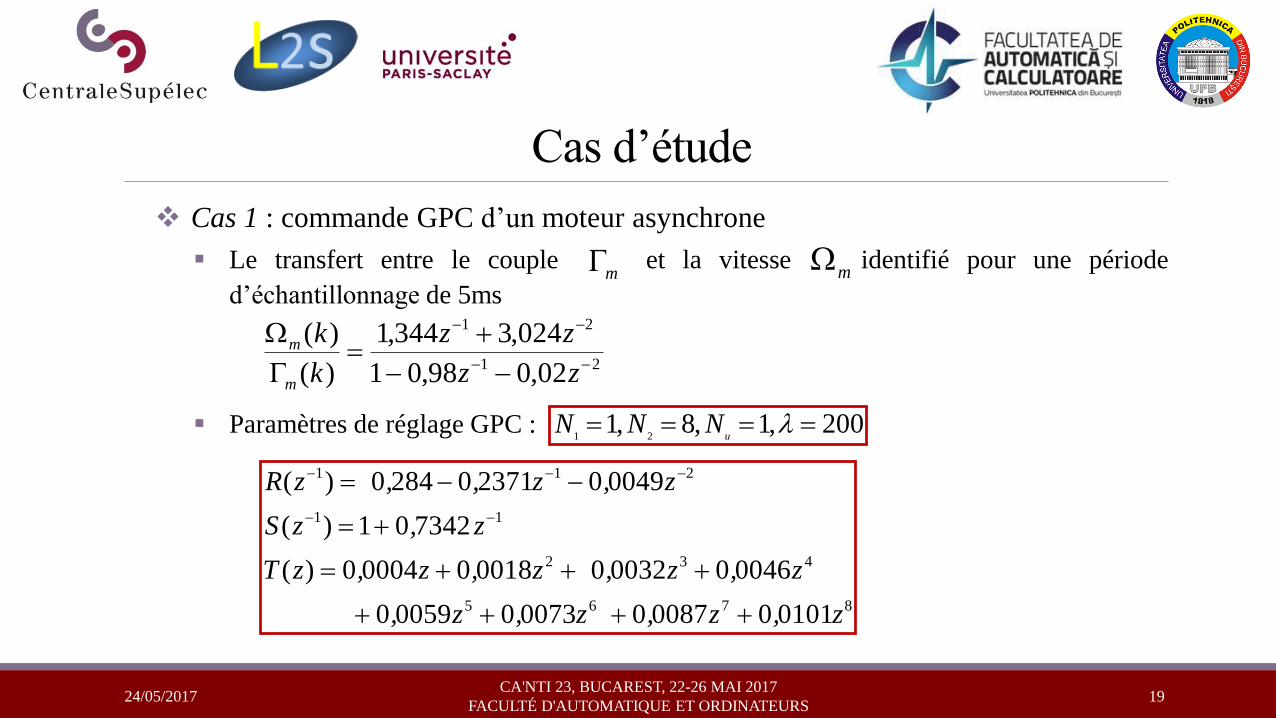
Cas d’étude
Cas 1 : commande GPC d’un moteur asynchrone
Le transfert entre le couple et la vitesse identifié pour une période
d’échantillonnage de 5ms
Paramètres de réglage GPC :
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS19
m m
21
21
02,098,01
024,3344,1
)(
)(
zz
zz
k
k
m
m
200,1,8,121
u
NNN
8765
432
11
211
01010008700073000590
00460003200018000040)(
734201)(
00490237102840)(
z,z, z,z,
z,z, z,z,zT
z,zS
z,z,, zR
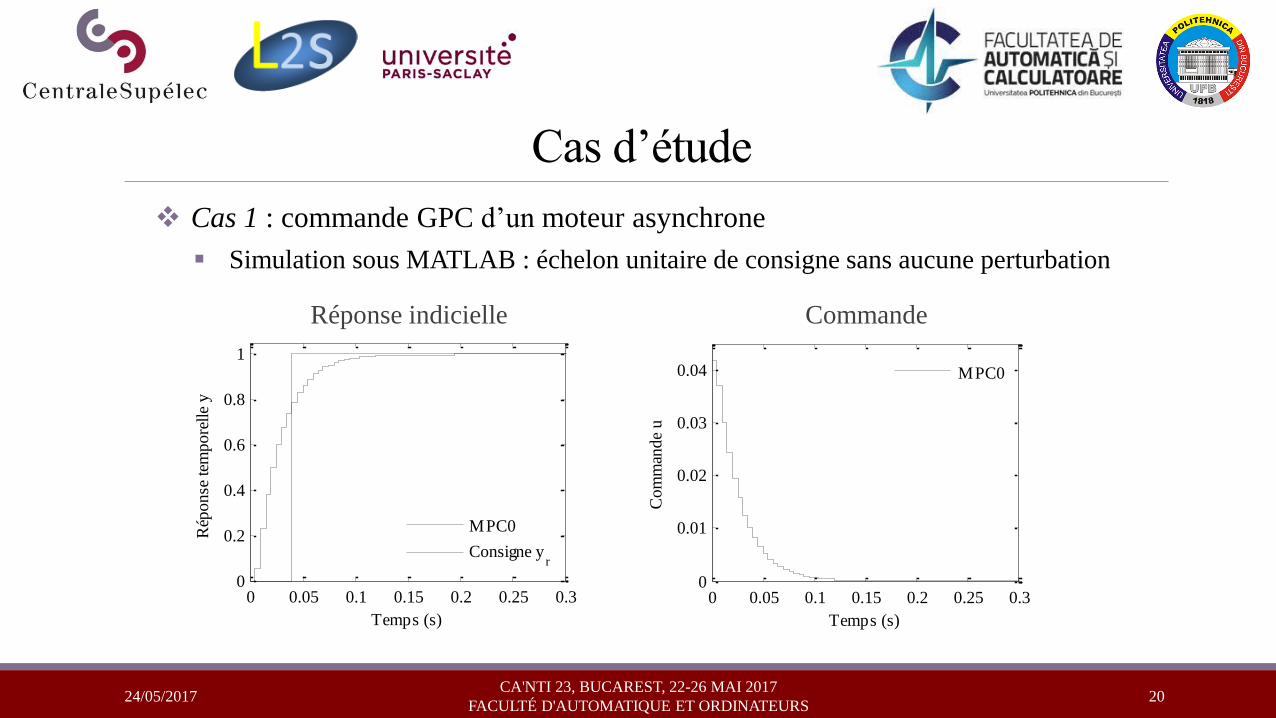
Cas d’étude
Cas 1 : commande GPC d’un moteur asynchrone
Simulation sous MATLAB : échelon unitaire de consigne sans aucune perturbation
Réponse indicielle Commande
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS20
0 0.05 0.1 0.15 0.2 0.25 0.30
0.2
0.4
0.6
0.8
1
Temps (s)
Rép
onse
tem
pore
lle
y
MPC0
Consigne yr
0 0.05 0.1 0.15 0.2 0.25 0.30
0.01
0.02
0.03
0.04
Temps (s)
Com
man
de
u
MPC0
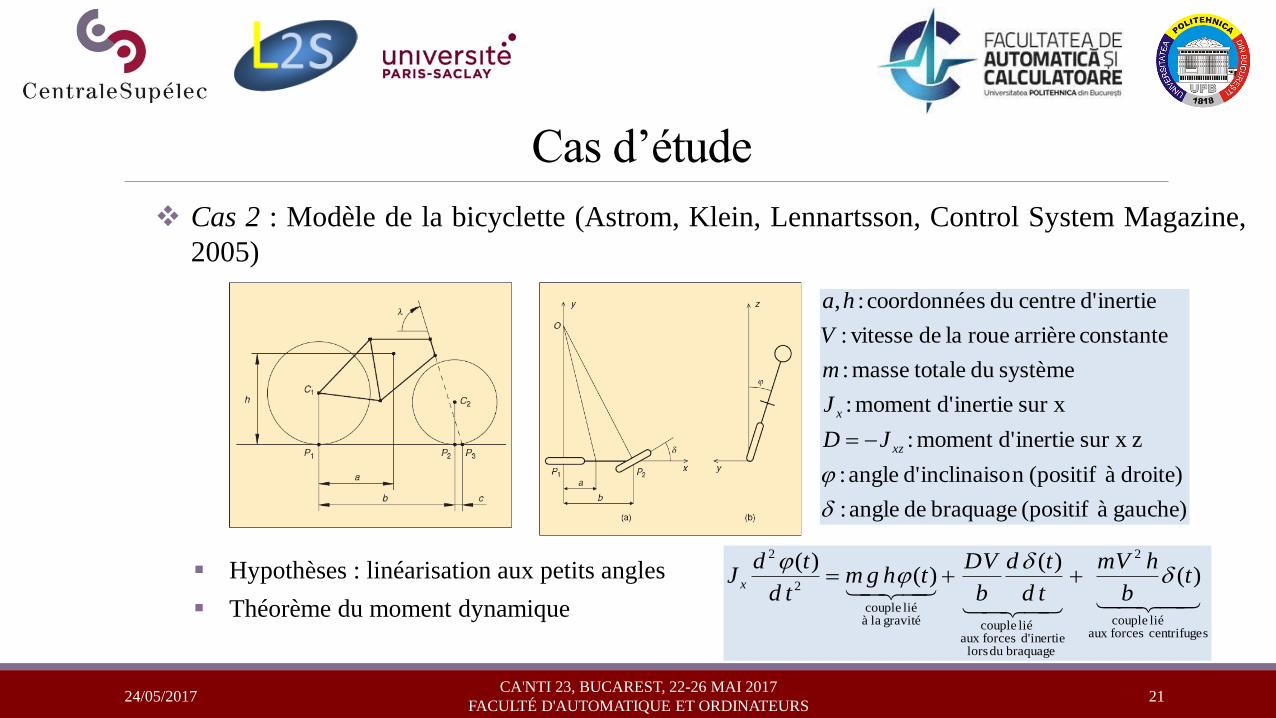
Cas d’étude
Cas 2 : Modèle de la bicyclette (Astrom, Klein, Lennartsson, Control System Magazine,
2005)
Hypothèses : linéarisation aux petits angles
Théorème du moment dynamique
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS21
gauche) à (positif braquage de angle :
droite) à (positifn inclinaisod' angle :
zsur x inertied'moment :
sur x inertied'moment :
systèmedu totalemasse :
constante arrière roue la de vitesse:
inertied' centredu scoordonnée : ,
xz
x
JD
J
m
V
ha
scentrifuge forcesaux lié couple
2
braquagedu lors inertied' forcesaux
lié couplegravité la àlié couple
2
2
)()(
)()(
tb
hVm
td
td
b
VDthgm
td
tdJ x
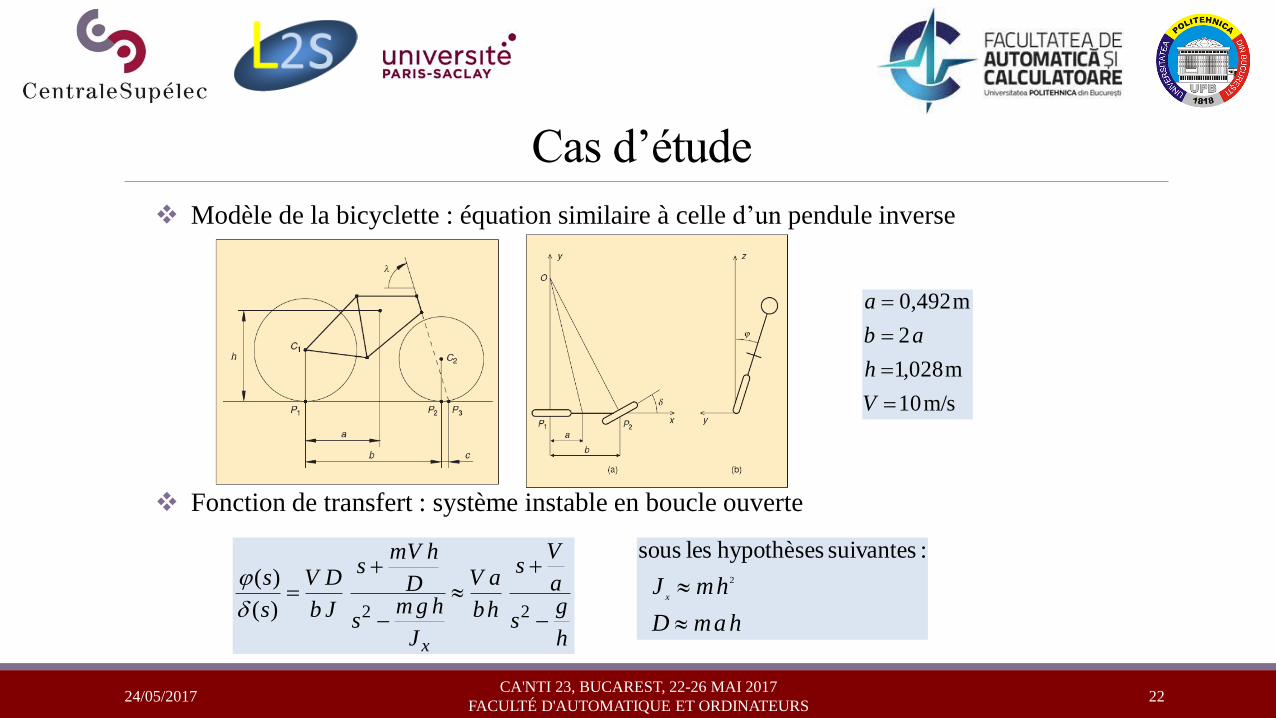
Cas d’étude
Modèle de la bicyclette : équation similaire à celle d’un pendule inverse
Fonction de transfert : système instable en boucle ouverte
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS22
m/s10
m028,1
2
m0,492
V
h
ab
a
h
gs
a
Vs
hb
aV
J
hgms
D
hVms
Jb
DV
s
s
x
22)(
)(
hamD
hmJx
2
: suivantes hypothèses les sous
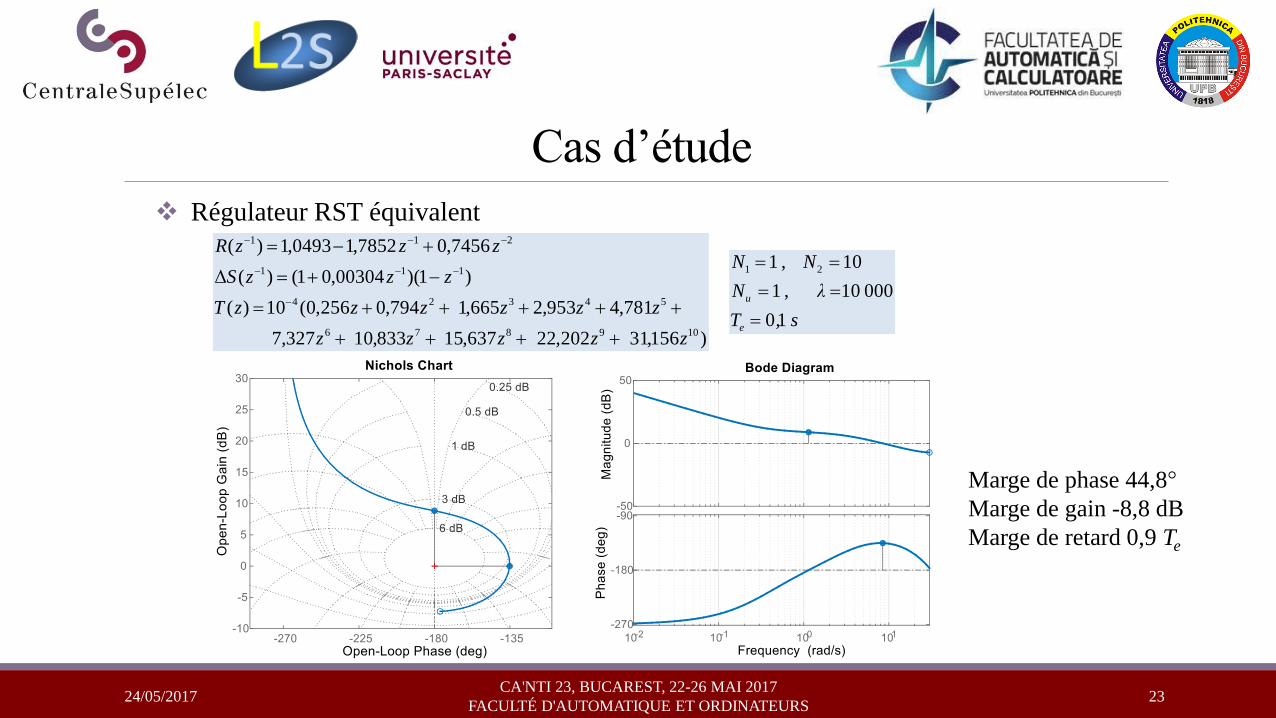
Cas d’étude
Régulateur RST équivalent
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS23
Marge de phase 44,8°
Marge de gain -8,8 dB
Marge de retard 0,9 Te
)156,31202,22637,15833,10327,7
781,4953,2665,1794,0256,0(10)(
)1)(00304,01()(Δ
7456,07852,10493,1)(
109876
54324
111
211
z z z z z
zzz zzzT
zzzS
zzzR
s,T
λN
NN
e
u
10
00010,1
10,1 21
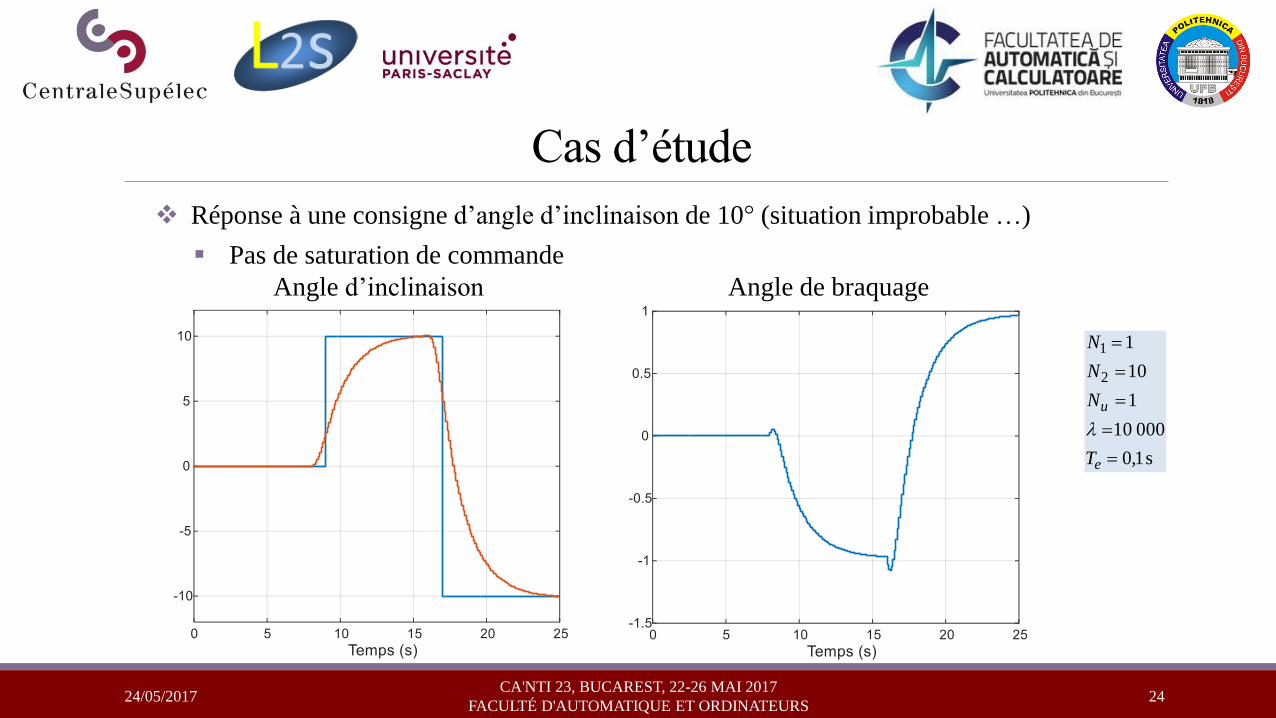
Cas d’étude
Réponse à une consigne d’angle d’inclinaison de 10° (situation improbable …)
Pas de saturation de commande
Angle d’inclinaison Angle de braquage
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS24
s 1,0
00010
1
01
1
2
1
e
u
T
N
N
N
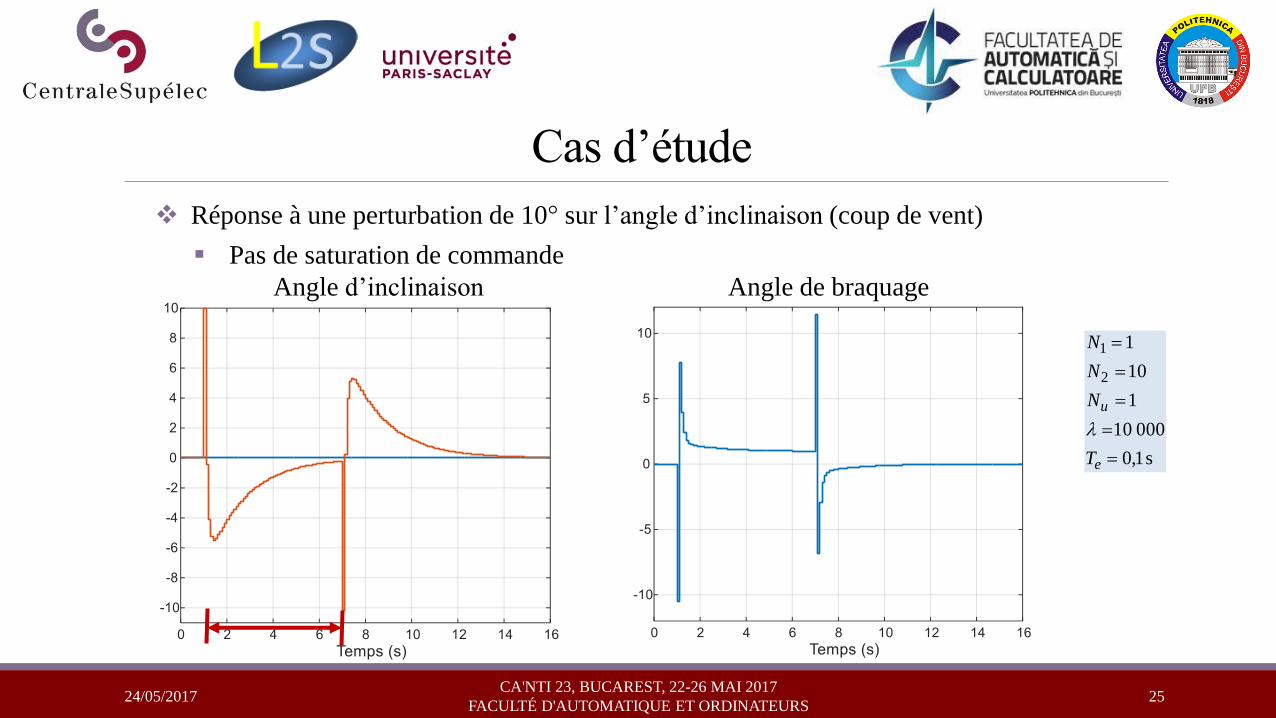
Cas d’étude
Réponse à une perturbation de 10° sur l’angle d’inclinaison (coup de vent)
Pas de saturation de commande
Angle d’inclinaison Angle de braquage
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS25
s 1,0
00010
1
01
1
2
1
e
u
T
N
N
N
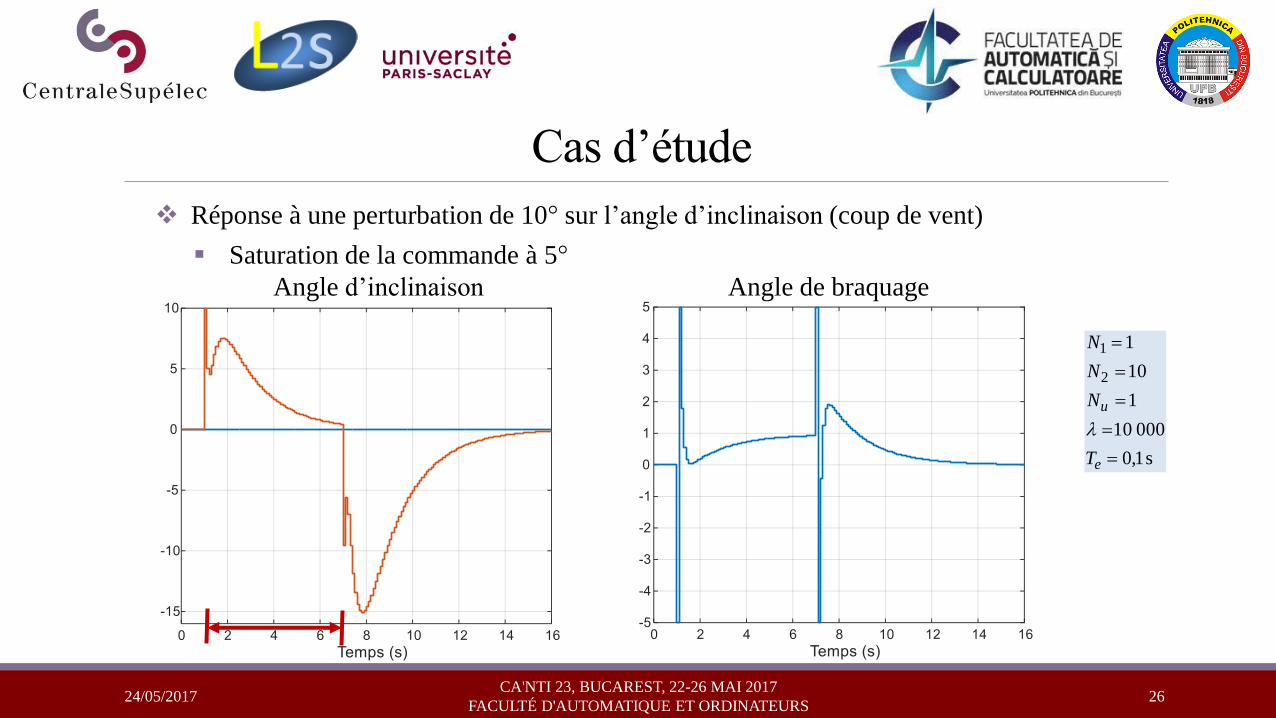
Cas d’étude
Réponse à une perturbation de 10° sur l’angle d’inclinaison (coup de vent)
Saturation de la commande à 5°
Angle d’inclinaison Angle de braquage
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS26
s 1,0
00010
1
01
1
2
1
e
u
T
N
N
N
Plan du cours
Principe de la commande prédictive : rappel
Elaboration de la commande : étapes de synthèse de la loi de commande, principe de l’horizon fuyant
Prise en compte de contraintes
Avantages et défis
Commande prédictive sans contraintes
Approche GPC (Commande Prédictive Généralisée)
Cas d’étude
Commande prédictive avec contraintes
Approche MPC (Model Predictive Control)
Cas d’étude
Faisabilité et stabilité
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS27
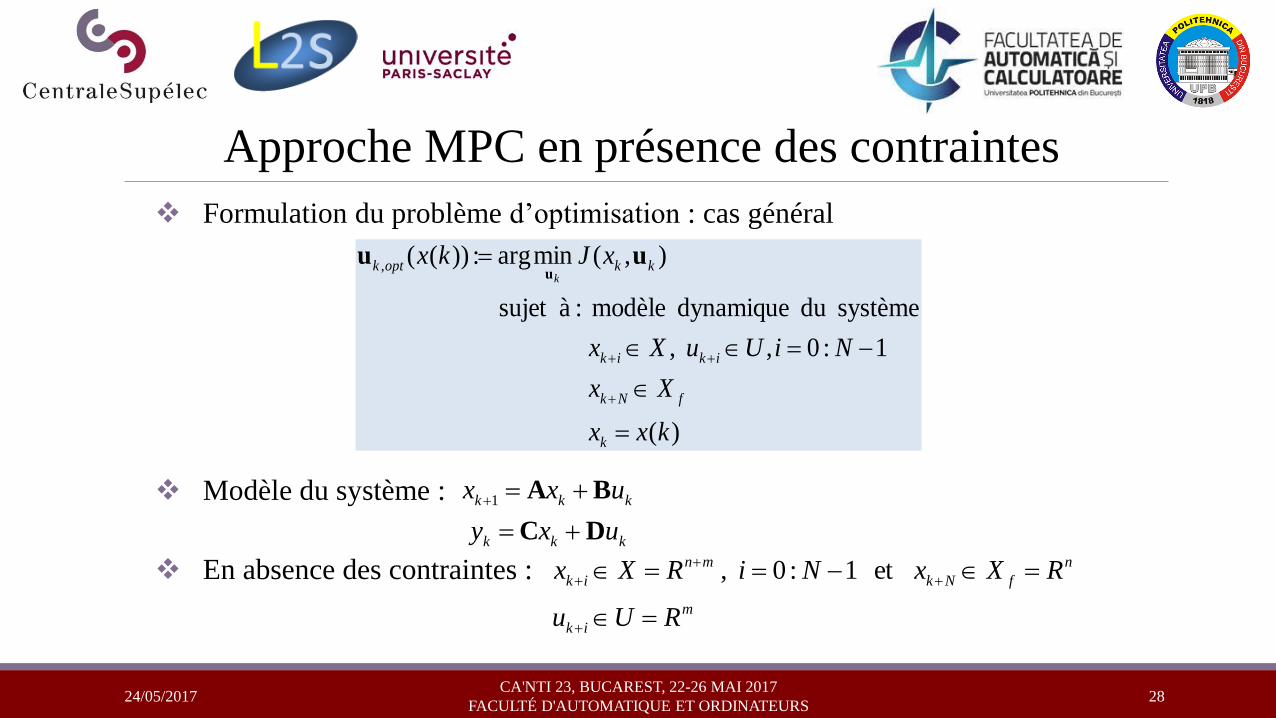
Approche MPC en présence des contraintes
Formulation du problème d’optimisation : cas général
Modèle du système :
En absence des contraintes :
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS28
)(
1:0,,
systèmedu dynamique modèle :àsujet
),(minarg:))((,
kxx
Xx
NiUuXx
xJkx
k
fNk
ikik
kkoptkk
uuu
m
ik
n
fNk
mn
ik
RUu
RXxNiRXx
et 1:0,
kkk
kkk
uxy
uxx
DC
BA
1
Approche MPC en présence des contraintes
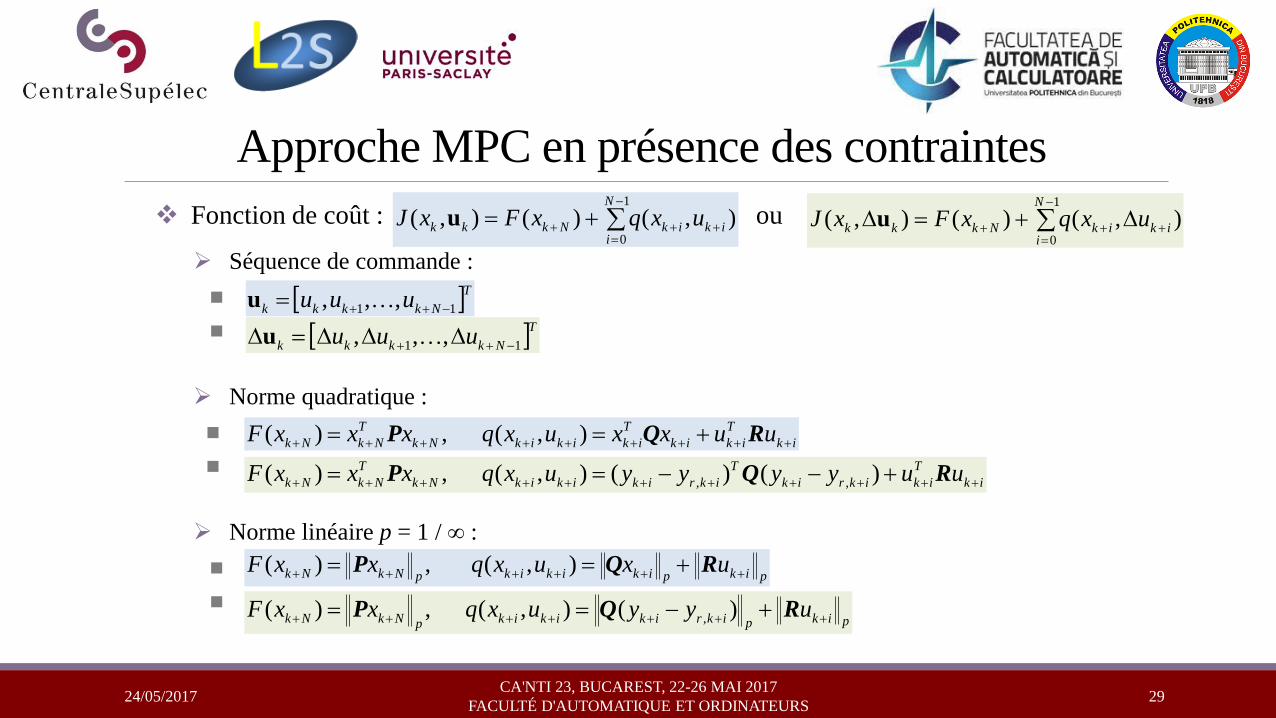
Fonction de coût : ou
Séquence de commande :
■
■
Norme quadratique :
■
■
Norme linéaire p = 1 / ∞ :
■
■
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS29
1
0
),()(),(N
iikikNkkk uxqxFxJ u
TNkkkk uuu 11 ,,, u
ik
T
ikik
T
ikikikNk
T
NkNk uuxxuxqxxxF RQP ),(,)(
TNkkkk uuu 11 ,,, u
1
0
),()(),(N
iikikNkkk uxqxFxJ u
ik
T
ikikrik
T
ikrikikikNk
T
NkNk uuyyyyuxqxxxF RQP )()(),(,)( ,,
pikpikikikpNkNk uxuxqxxF RQP ),(,)(
pikpikrikikikpNkNk uyyuxqxxF RQP )(),(,)( ,
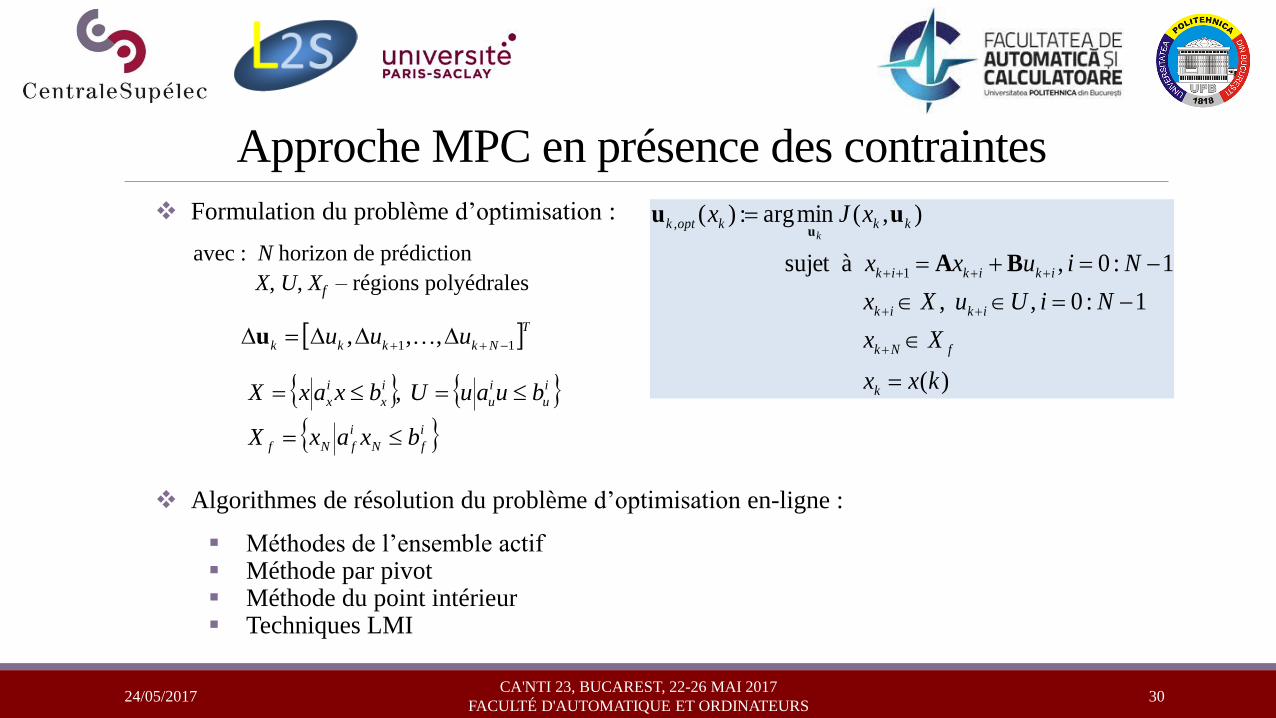
Approche MPC en présence des contraintes
Formulation du problème d’optimisation :
avec : N horizon de prédiction
X, U, Xf – régions polyédrales
Algorithmes de résolution du problème d’optimisation en-ligne :
Méthodes de l’ensemble actif Méthode par pivot Méthode du point intérieur Techniques LMI
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS30
TNkkkk uuu 11 ,,, u
)(
1:0,,
1:0, àsujet
),(minarg:)(
1
,
kxx
Xx
NiUuXx
Niuxx
xJx
k
fNk
ikik
ikikik
kkkoptkk
BA
uuu
i
fN
i
fNf
i
u
i
u
i
x
i
x
bxaxX
buauUbxaxX
,
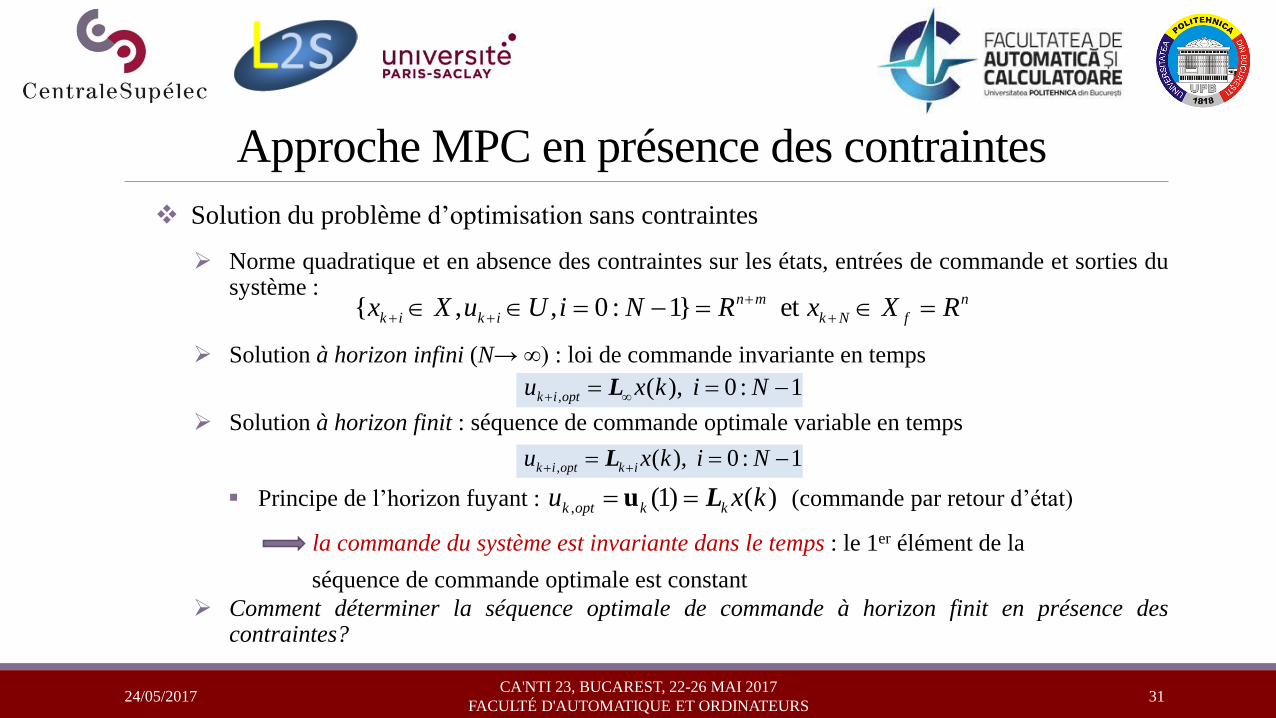
Approche MPC en présence des contraintes
Solution du problème d’optimisation sans contraintes
Norme quadratique et en absence des contraintes sur les états, entrées de commande et sorties dusystème :
Solution à horizon infini (N→ ∞) : loi de commande invariante en temps
Solution à horizon finit : séquence de commande optimale variable en temps
Principe de l’horizon fuyant : (commande par retour d’état)
la commande du système est invariante dans le temps : le 1er élément de la
séquence de commande optimale est constant
Comment déterminer la séquence optimale de commande à horizon finit en présence descontraintes?
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS31
n
fNk
mn
ikik RXxRNiUuXx
et }1:0,,{
1:0),(, Nikxu ikoptik L
)()1(, kxu kkoptk L u
1:0),(, Nikxu optik L
Approche MPC en présence des contraintes
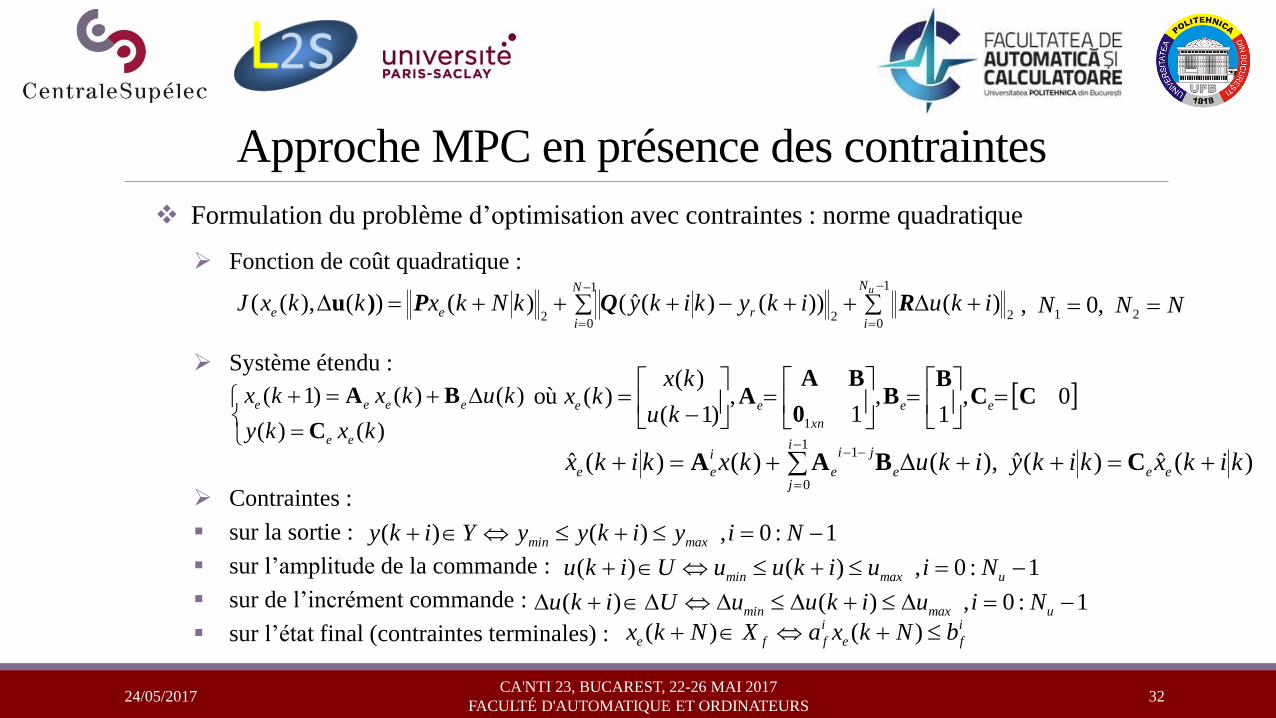
Formulation du problème d’optimisation avec contraintes : norme quadratique
Fonction de coût quadratique :
Système étendu :
Contraintes :
sur la sortie :
sur l’amplitude de la commande :
sur de l’incrément commande :
sur l’état final (contraintes terminales) :
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS32
1
02
1
022
)())()(ˆ()()(),((uN
i
N
iree ikuikykikykNkxkkxJ RQP)u
)()(
)()()1(
kxky
kukxkx
ee
eeee
C
BA 0,1
,1
,)1(
)()(où
1
CCB
B0
BAA
ee
xn
eeku
kxkx
NNN 21 ,0,
1:0, )()( umaxmin NiuikuuUiku
1:0, )()( umaxmin NiuikuuUiku
1:0, )()( NiyikyyYiky maxmin
i
fe
i
ffe bNkxaXNkx )()(
)(ˆ)(ˆ),()()(ˆ1
0
1kikxkikyikukxkikx eee
i
j
ji
e
i
ee
C BAA
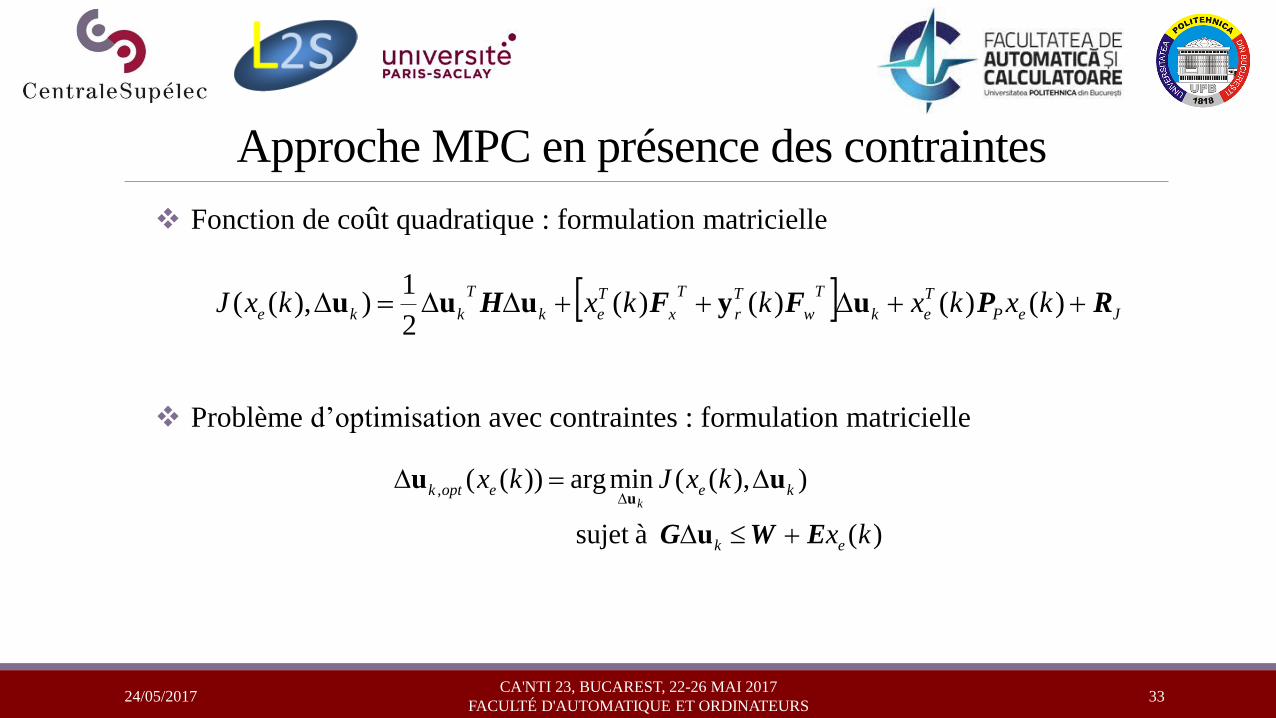
Approche MPC en présence des contraintes
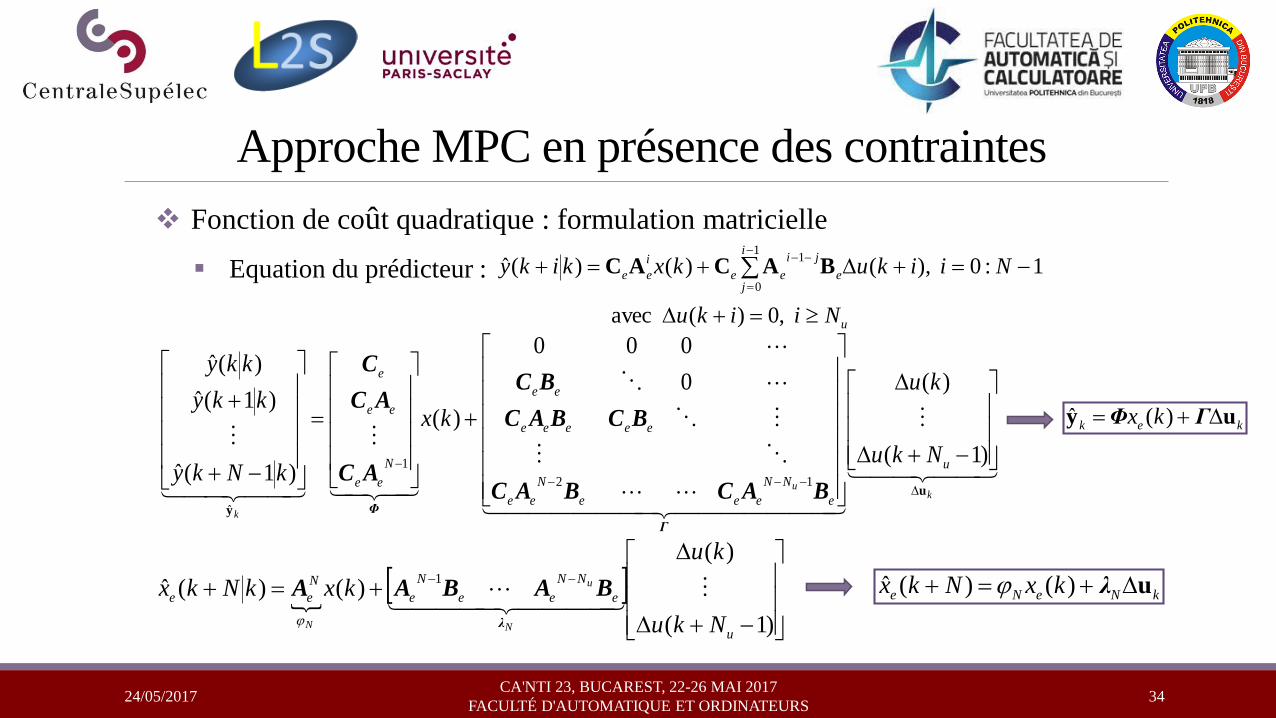
Fonction de coût quadratique : formulation matricielle
Problème d’optimisation avec contraintes : formulation matricielle
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS33
JeP
T
ek
T
w
T
r
T
x
T
ek
T
kke kxkxkkxkxJ RPFFH )()()()(2
1)),(( uyuuu
)( àsujet
)),((minarg))((,
kx
kxJkx
ek
keeoptkk
EWG
u
uuu
Approche MPC en présence des contraintes
Fonction de coût quadratique : formulation matricielle
Equation du prédicteur :
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS34
u
e
i
j
ji
ee
i
ee
Niiku
Niikukxkiky
BACAC
,0)( avec
1:0),()()(ˆ1
0
1
ku
k
u
e
NN
eee
N
ee
eeeee
ee
N
ee
ee
e
Nku
ku
kx
kNky
kky
kky
u
y
)1(
)(0
000
)(
)1(ˆ
)1(ˆ
)(ˆ
12
1
ˆ
Γ
ΦBACBAC
BCBAC
BC
AC
AC
C
kek kx uy ΓΦ )(ˆ
)1(
)(
)()(ˆ1
u
e
NN
ee
N
e
N
ee
Nku
ku
kxkNkx
N
u
N
λ
BABAA
kNeNe kxNkx u λ)()(ˆ
Approche MPC en présence des contraintes
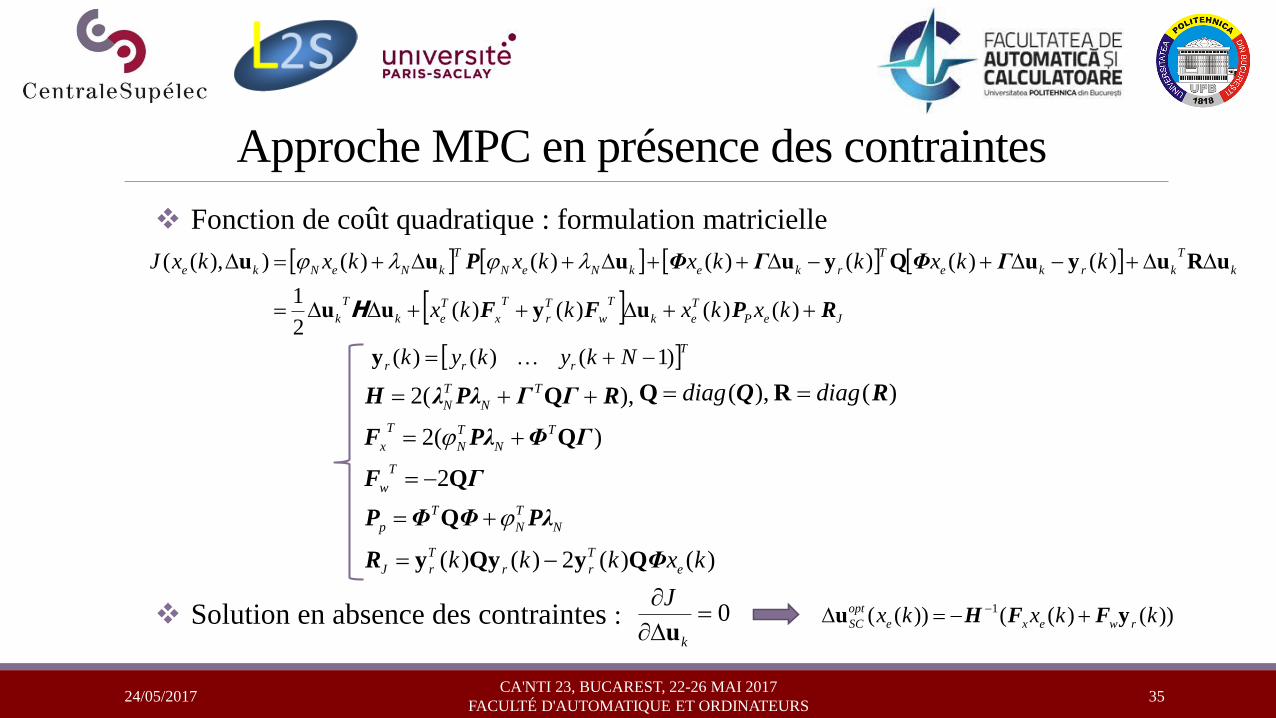
Fonction de coût quadratique : formulation matricielle
Solution en absence des contraintes :
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS35
JeP
T
ek
T
w
T
r
T
x
T
ek
T
k
k
T
krke
T
rkekNeN
T
kNeNke
kxkxkkx
kkxkkxkxkxkxJ
RPFF
ΓΦΓΦP
)()()()(2
1
)()()()()()()),((
uyuu
uRuyuQyuuuu
H
)(),( RQ diagdiag R Q
)()(2)()(
2
)(2
),(2
kxkkk e
T
rr
T
rJ
N
T
N
T
p
T
w
T
N
T
N
T
x
T
N
T
N
ΦR
PλΦΦP
ΓF
ΓΦPλF
RΓΓPλλH
QyyQy
Q
Q
Q
Q
Trrr Nkykyk )1()()( y
))()(())(( 1 kkxkx rwexe
opt
SC yu FFH 0
k
J
u
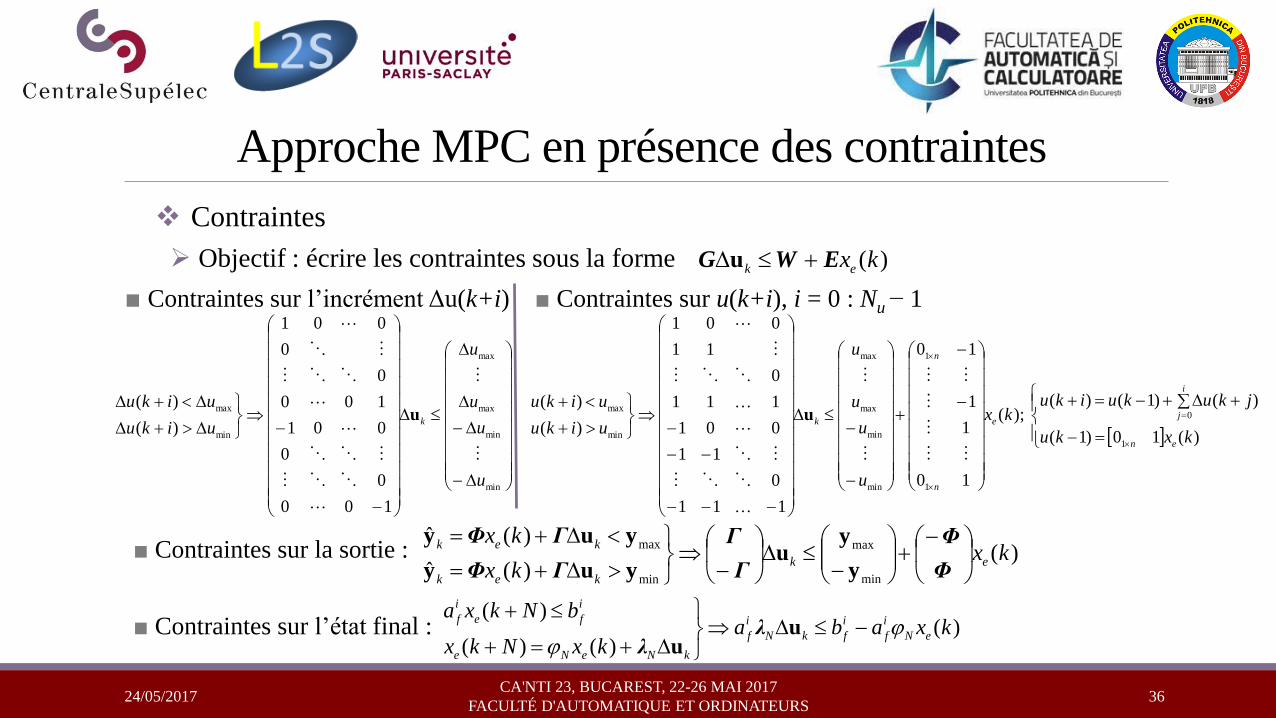
Approche MPC en présence des contraintes
Contraintes
Objectif : écrire les contraintes sous la forme
■ Contraintes sur l’incrément Δu(k+i) ■ Contraintes sur u(k+i), i = 0 : Nu − 1
■ Contraintes sur la sortie :
■ Contraintes sur l’état final :
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS36
)(kxek EWG u
min
min
max
max
min
max
100
0
0
001
100
0
0
001
)(
)(
u
u
u
u
uiku
uikuk
u
)(10)1(
)()1()();(
10
1
1
10
111
0
11
001
111
0
11
001
)(
)(
1
0
1
1
min
min
max
max
min
max
kxku
jkukuikukx
u
u
u
u
uiku
uiku
en
i
je
n
n
k u
)()(ˆ
)(ˆ
min
max
min
maxkx
kx
kxek
kek
kek
Φ
Φ
Γ
Γ
ΓΦ
ΓΦ
y
yu
yuy
yuy
)()()(
)(kxaba
kxNkx
bNkxaeN
i
f
i
fkN
i
f
kNeNe
i
fe
i
f
u
uλ
λ
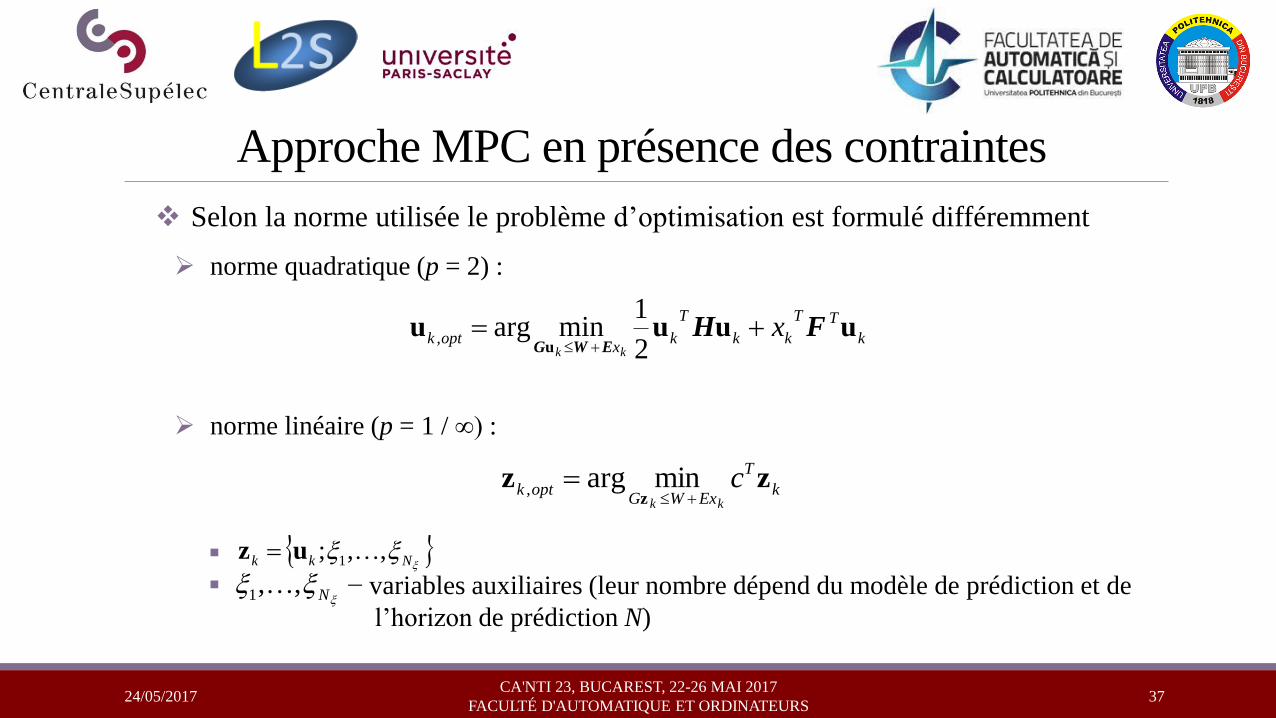
Approche MPC en présence des contraintes
Selon la norme utilisée le problème d’optimisation est formulé différemment
norme quadratique (p = 2) :
norme linéaire (p = 1 / ∞) :
− variables auxiliaires (leur nombre dépend du modèle de prédiction et de
l’horizon de prédiction N)
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS37
k
TT
kk
T
kx
optk xkk
uuuuu
FHEWG
2
1minarg,
k
T
ExWGoptk c
kk
zzz
minarg,
Nkk ,,; 1 uz
N,,1

Modèle de la bicyclette
Fonction de transfert : système instable en boucle ouverte
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS38
m/s10
m028,1
2
m0,492
V
h
ab
a
h
gs
a
Vs
hb
aV
J
hgms
D
hVms
Jb
DV
s
s
x
22)(
)(
hamD
hmJ x
2
: hypothèses les sous
Cas d’étude
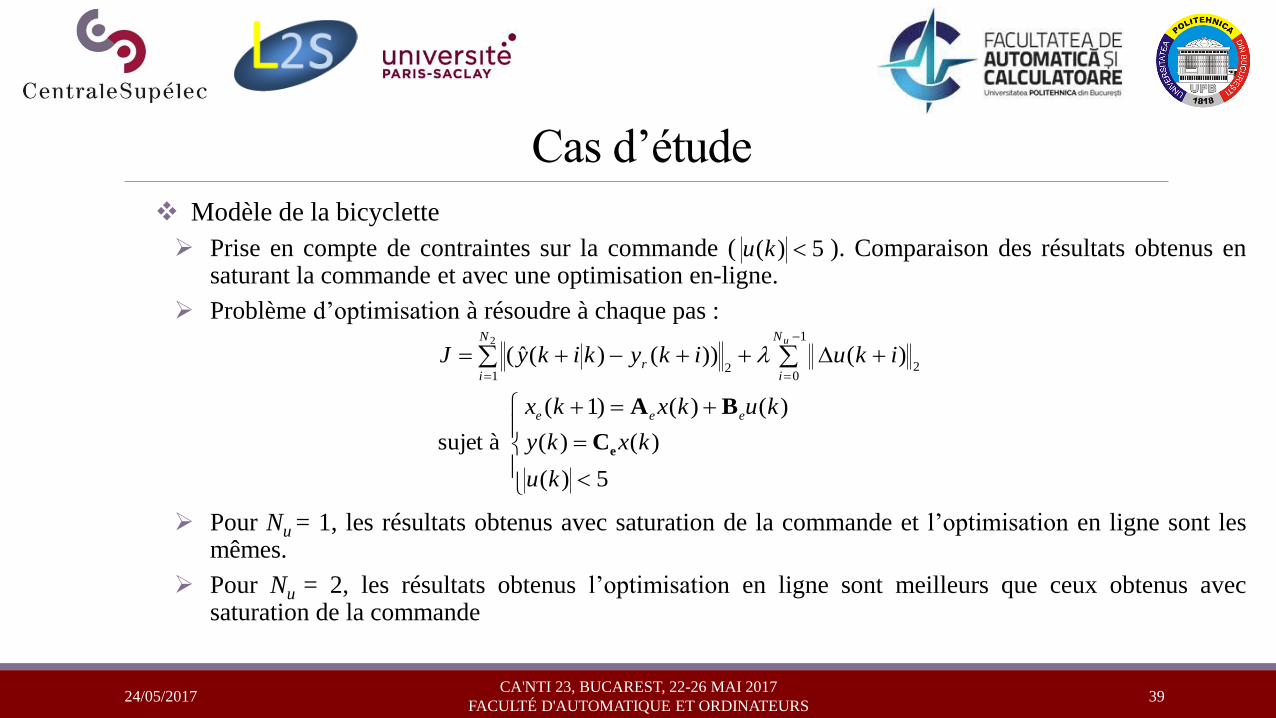
Modèle de la bicyclette
Prise en compte de contraintes sur la commande ( ). Comparaison des résultats obtenus ensaturant la commande et avec une optimisation en-ligne.
Problème d’optimisation à résoudre à chaque pas :
Pour Nu = 1, les résultats obtenus avec saturation de la commande et l’optimisation en ligne sont lesmêmes.
Pour Nu = 2, les résultats obtenus l’optimisation en ligne sont meilleurs que ceux obtenus avecsaturation de la commande
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS39
5)(
)()(
)()()1(
àsujet
)())()(ˆ(1
02
12
2
ku
kxky
kukxkx
ikuikykikyJ
eee
N
i
N
ir
u
eC
BA
5)( ku
Cas d’étude
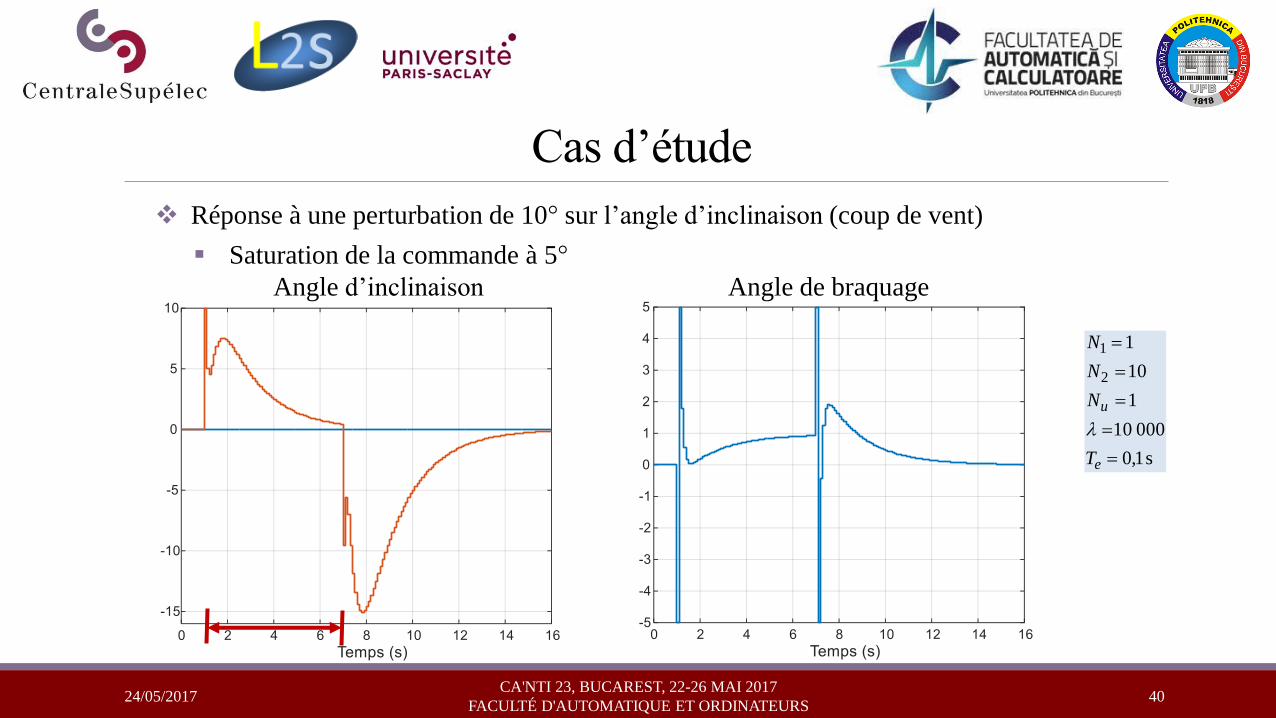
Réponse à une perturbation de 10° sur l’angle d’inclinaison (coup de vent)
Saturation de la commande à 5°
Angle d’inclinaison Angle de braquage
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS40
s 1,0
00010
1
01
1
2
1
e
u
T
N
N
N
Cas d’étude
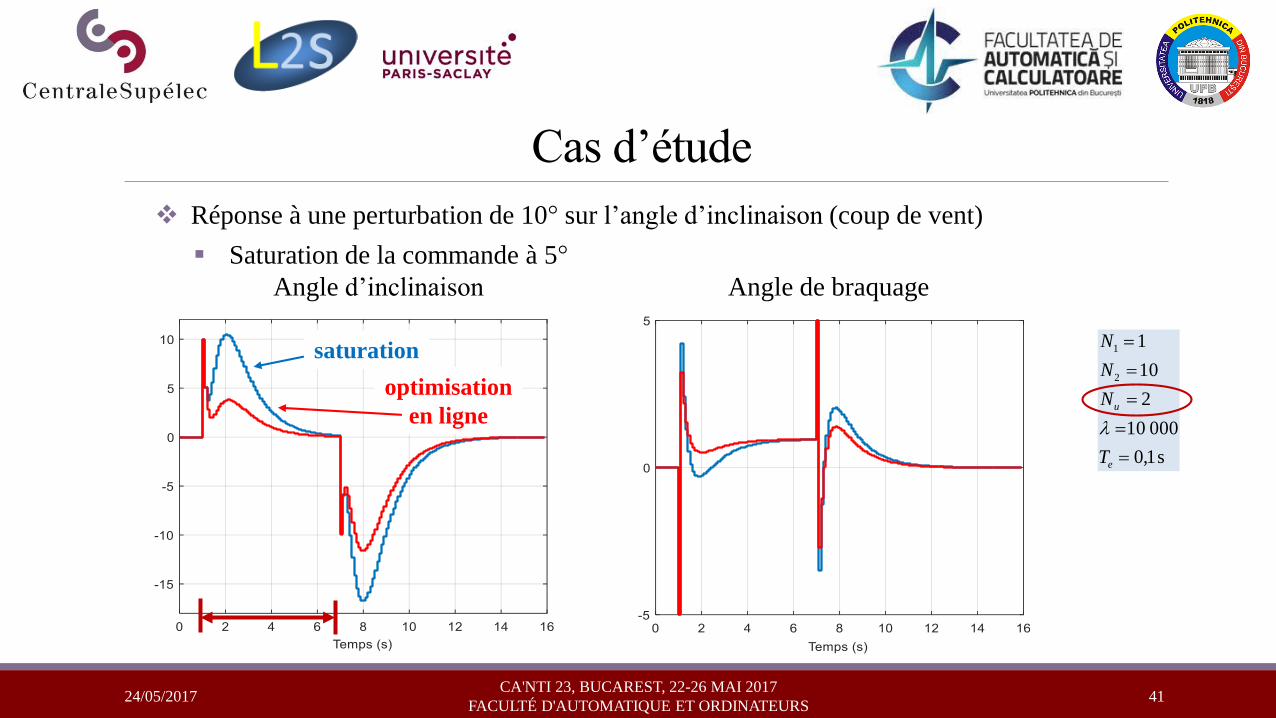
Réponse à une perturbation de 10° sur l’angle d’inclinaison (coup de vent)
Saturation de la commande à 5°
Angle d’inclinaison Angle de braquage
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS41
s 1,0
00010
2
10
1
2
1
e
u
T
N
N
N
saturation
optimisation
en ligne
Cas d’étude
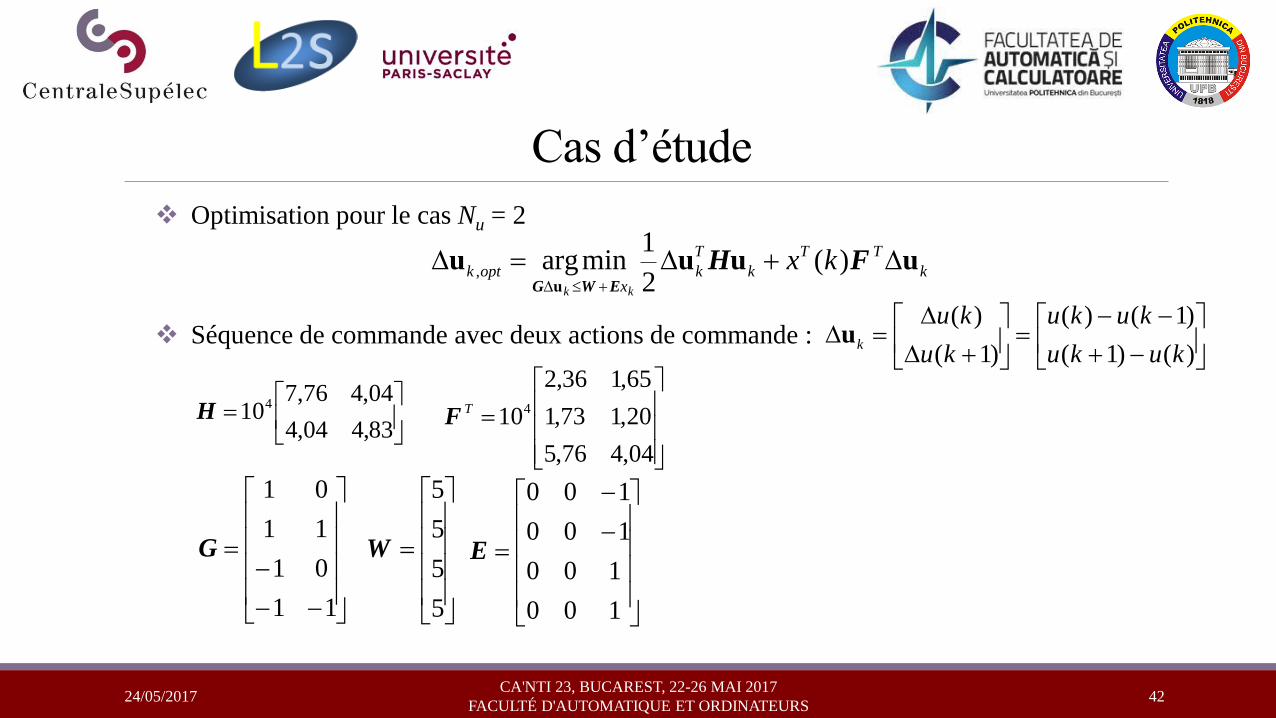
Optimisation pour le cas Nu = 2
Séquence de commande avec deux actions de commande :
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS42
83,404,4
04,476,7104
H
k
TT
k
T
kx
optk kxkk
uuuuu
FHEWG
)(2
1minarg,
04,476,5
20,173,1
65,136,2
104TF
11
01
11
01
G
)()1(
)1()(
)1(
)(
kuku
kuku
ku
kuku
5
5
5
5
W
100
100
100
100
E
Cas d’étude
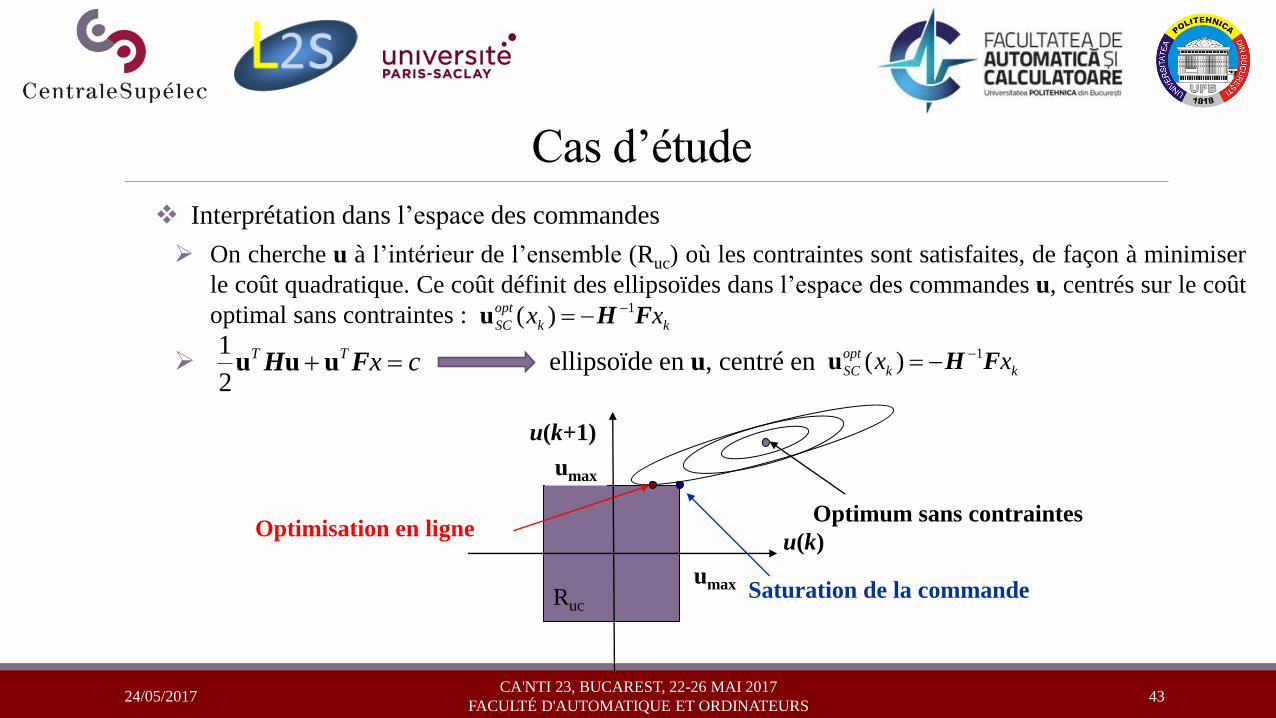
Interprétation dans l’espace des commandes
On cherche u à l’intérieur de l’ensemble (Ruc) où les contraintes sont satisfaites, de façon à minimiser
le coût quadratique. Ce coût définit des ellipsoïdes dans l’espace des commandes u, centrés sur le coût
optimal sans contraintes :
ellipsoïde en u, centré en
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS43
u(k)
u(k+1)
umax
Optimum sans contraintesOptimisation en ligne
Saturation de la commandeumax
kk
opt
SC xx FH1)( u
cxTT FH uuu2
1kk
opt
SC xx FH1)( u
Ruc
Cas d’étude
Faisabilité et stabilité
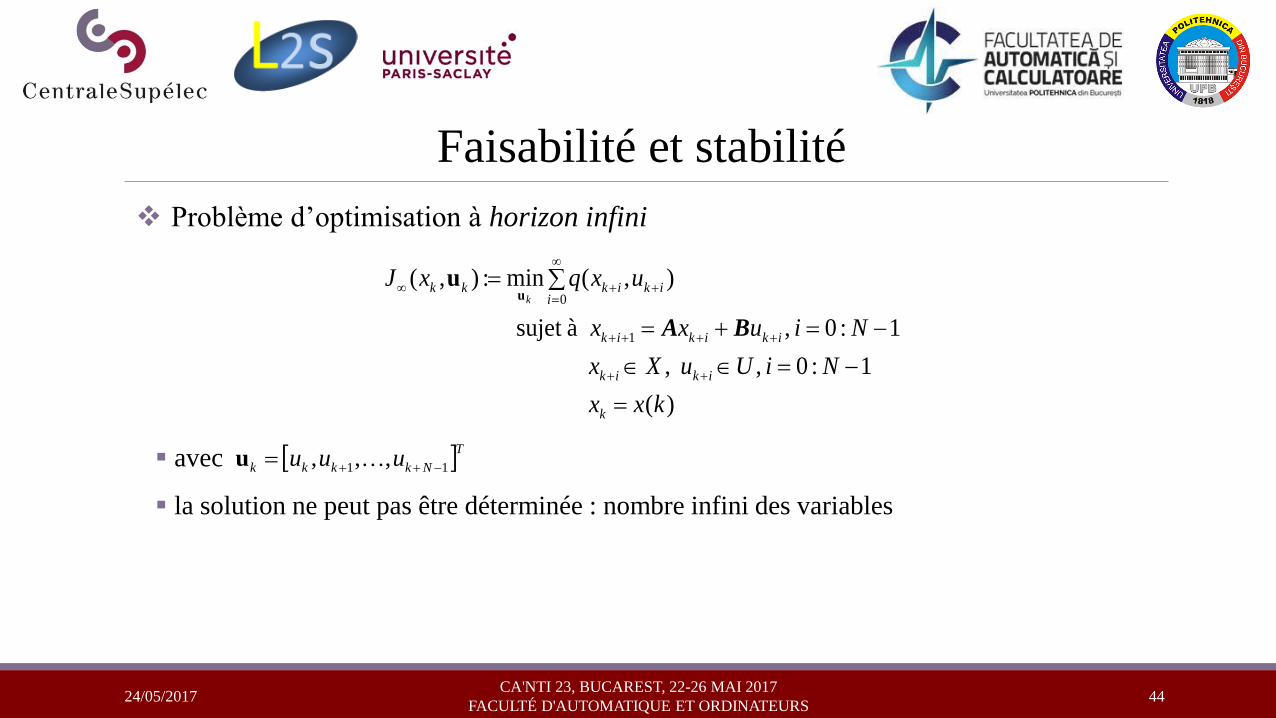
Problème d’optimisation à horizon infini
avec
la solution ne peut pas être déterminée : nombre infini des variables
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS44
)(
1:0,,
1:0, àsujet
),(min:),(
1
0
kxx
NiUuXx
Niuxx
uxqxJ
k
ikik
ikikik
iikikkk
k
uu
BA
TNkkkk uuu 11 ,,, u
Faisabilité et stabilité
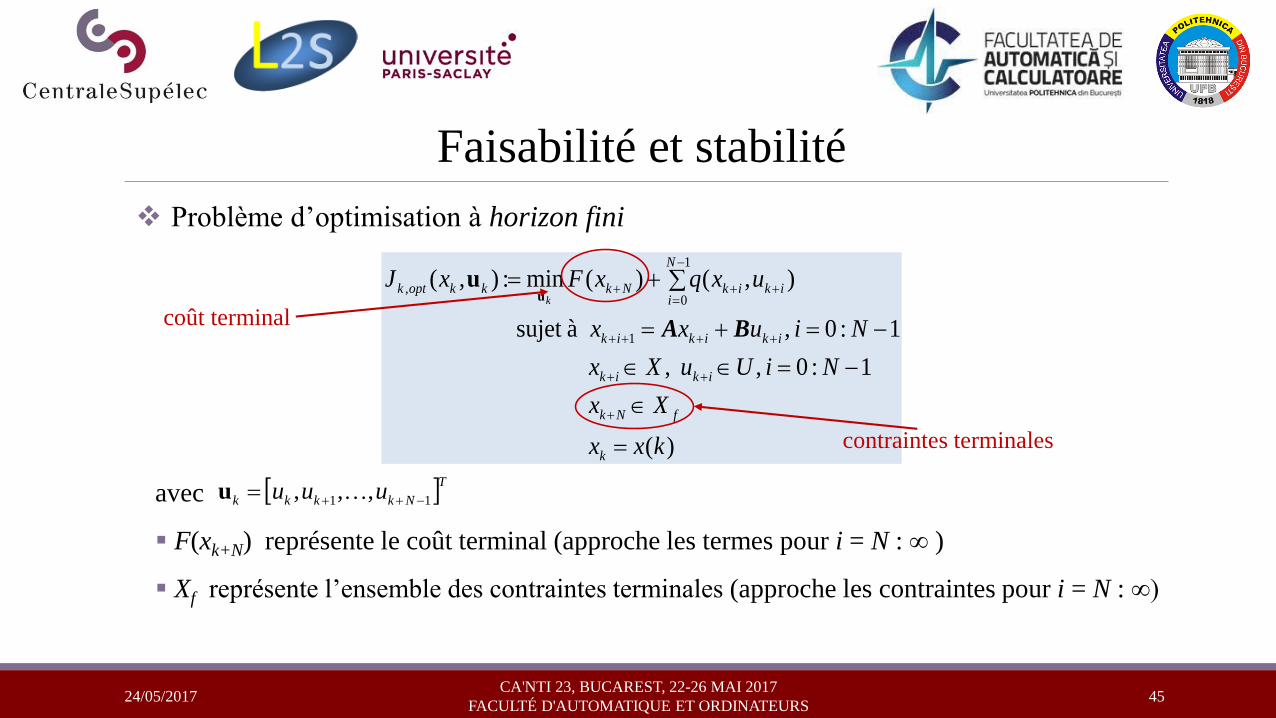
Problème d’optimisation à horizon fini
avec
F(xk+N) représente le coût terminal (approche les termes pour i = N : ∞ )
Xf représente l’ensemble des contraintes terminales (approche les contraintes pour i = N : ∞)
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS45
)(
1:0,,
1:0, àsujet
),()(min:),(
1
1
0,
kxx
Xx
NiUuXx
Niuxx
uxqxFxJ
k
fNk
ikik
ikikik
N
iikikNkkkoptk
k
uu
BA
TNkkkk uuu 11 ,,, u
coût terminal
contraintes terminales
Faisabilité et stabilité
Résolution en ligne du problème d’optimisation à horizon finit en utilisant le principe de l’horizon fuyant
1) Mesurer l’état x(k) à l’instant k
2) Calculer uk,opt par la résolution d’un problème d’optimisation sous contraintes
3) Si uk,opt ≠ ∅ alors « problème infaisable » STOP
4) Applique au système a commande uopt(k)= uk,opt(1)
5) Retour au pas 1) au prochain pas d’ échantillonnage
Difficultés
Pas de garantie de faisabilité : pas de solution au problème d’optimisation
Pas de garantie de stabilité : la trajectoire peut ne pas converge vers l’origine
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS46
Faisabilité et stabilité
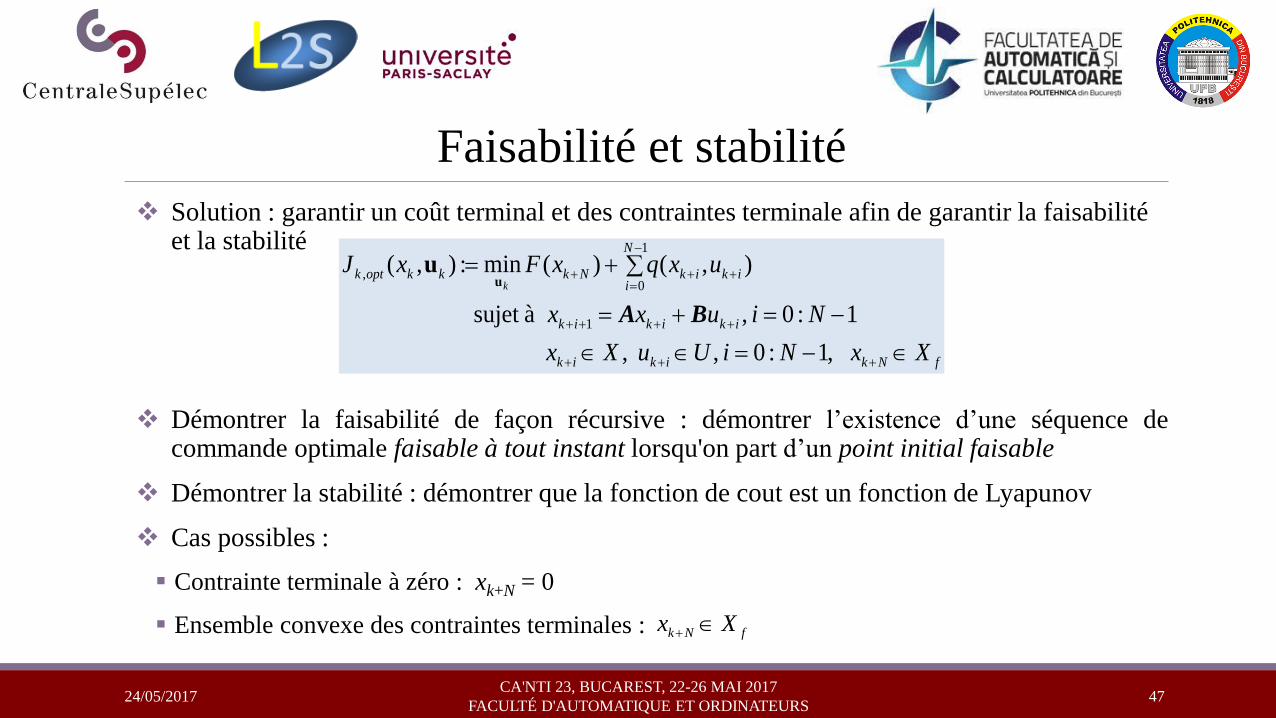
Solution : garantir un coût terminal et des contraintes terminale afin de garantir la faisabilité et la stabilité
Démontrer la faisabilité de façon récursive : démontrer l’existence d’une séquence decommande optimale faisable à tout instant lorsqu'on part d’un point initial faisable
Démontrer la stabilité : démontrer que la fonction de cout est un fonction de Lyapunov
Cas possibles :
Contrainte terminale à zéro : xk+N = 0
Ensemble convexe des contraintes terminales :
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS47
fNkikik
ikikik
N
iikikNkkkoptk
XxNiUuXx
Niuxx
uxqxFxJk
uu
,1:0,,
1:0, àsujet
),()(min:),(
1
1
0,
BA
fNk Xx
Approche MPC en présence des contraintes
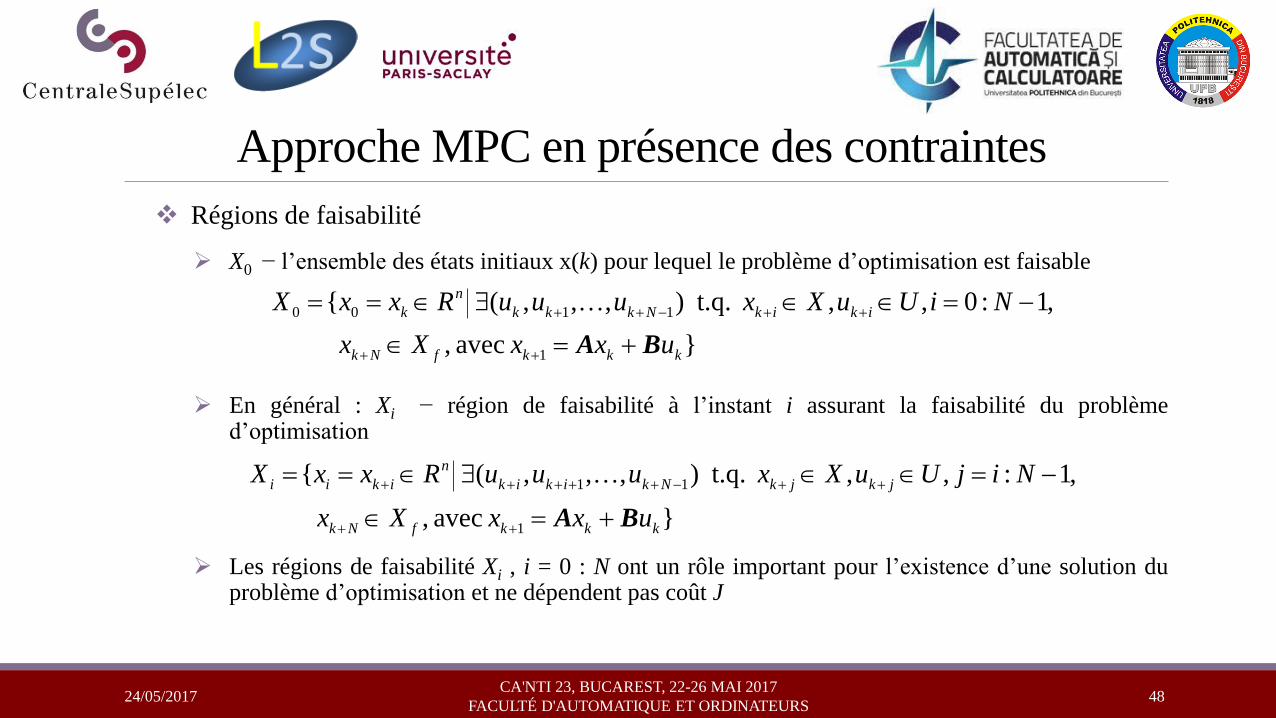
Régions de faisabilité
X0 − l’ensemble des états initiaux x(k) pour lequel le problème d’optimisation est faisable
En général : Xi − région de faisabilité à l’instant i assurant la faisabilité du problèmed’optimisation
Les régions de faisabilité Xi , i = 0 : N ont un rôle important pour l’existence d’une solution duproblème d’optimisation et ne dépendent pas coût J
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS48
} avec ,
,1:0,, t.q.),,,({
1
1100
kkkfNk
ikikNkkk
n
k
uxxXx
NiUuXxuuuRxxX
BA
} avec ,
,1:,, t.q.),,,({
1
11
kkkfNk
jkjkNkikik
n
ikii
uxxXx
NijUuXxuuuRxxX
BA
Faisabilité et stabilité
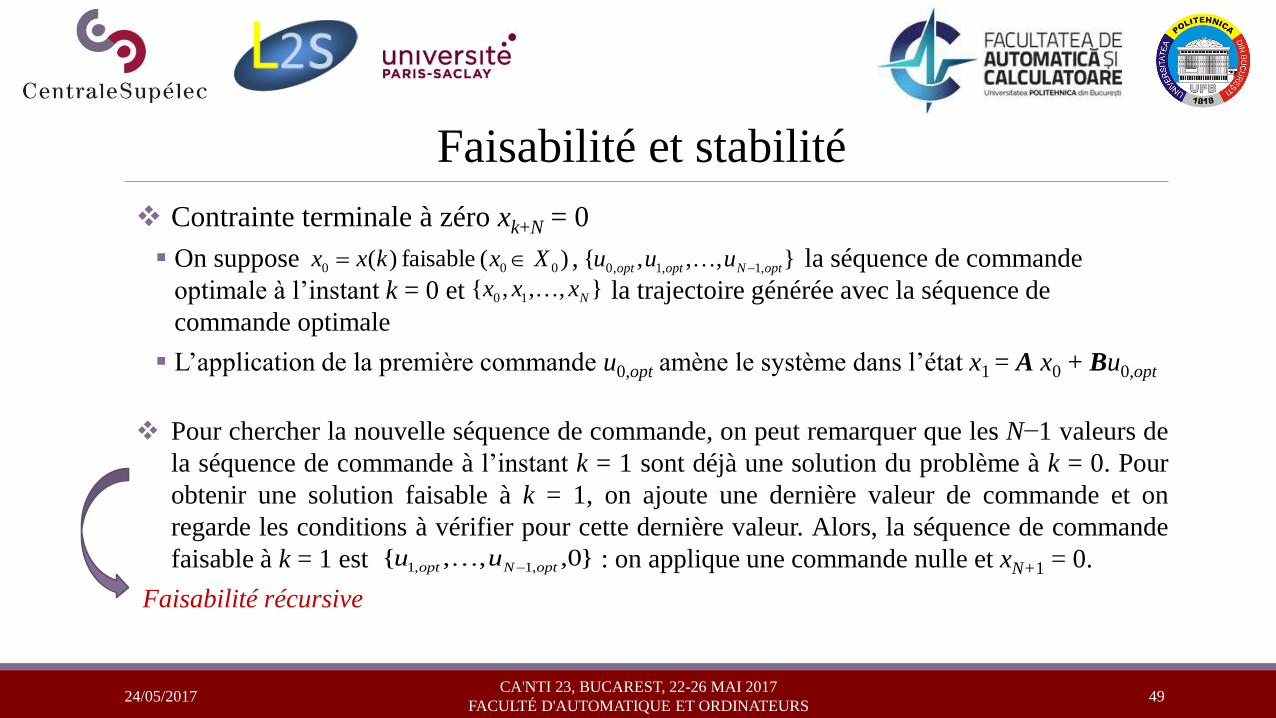
Contrainte terminale à zéro xk+N = 0
On suppose , la séquence de commande
optimale à l’instant k = 0 et la trajectoire générée avec la séquence de
commande optimale
L’application de la première commande u0,opt amène le système dans l’état x1 = A x0 + Bu0,opt
Pour chercher la nouvelle séquence de commande, on peut remarquer que les N−1 valeurs de
la séquence de commande à l’instant k = 1 sont déjà une solution du problème à k = 0. Pour
obtenir une solution faisable à k = 1, on ajoute une dernière valeur de commande et on
regarde les conditions à vérifier pour cette dernière valeur. Alors, la séquence de commande
faisable à k = 1 est : on applique une commande nulle et xN+1 = 0.
Faisabilité récursive
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS49
)( faisable )( 000 Xxkxx },,,{ ,1,1,0 optNoptopt uuu },,,{ 10 Nxxx
}0,,,{ ,1,1 optNopt uu
Faisabilité et stabilité
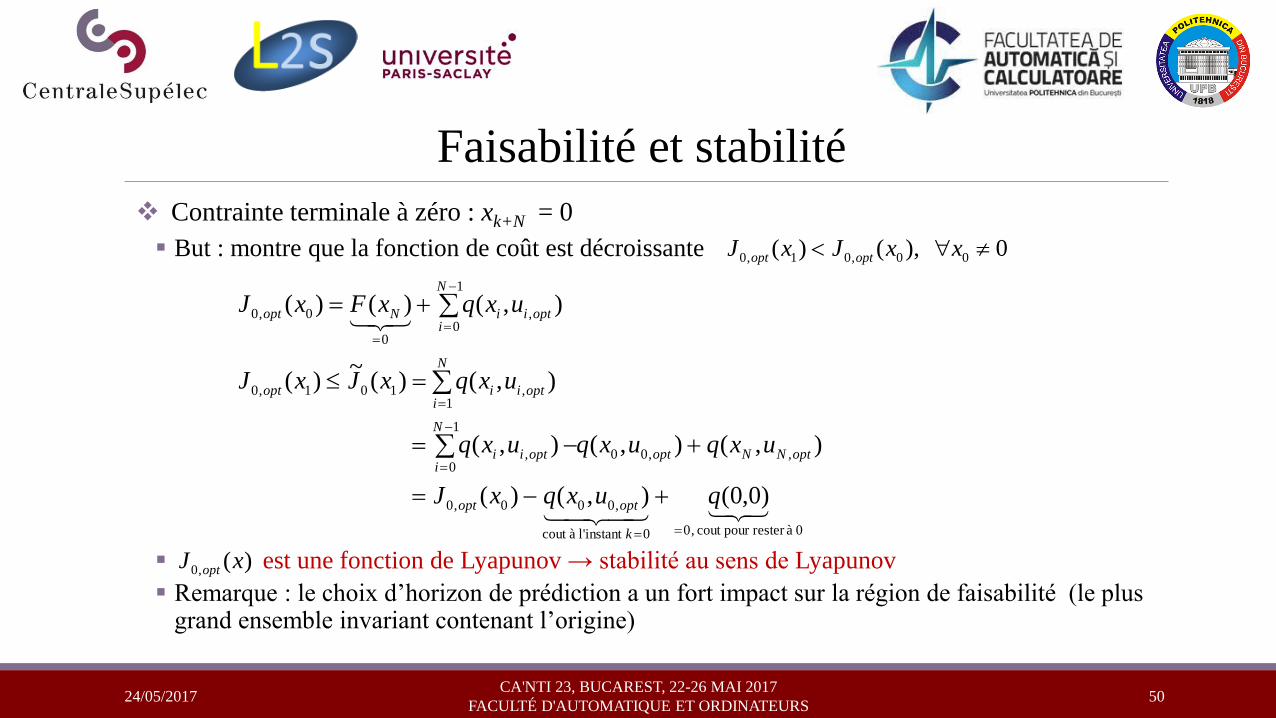
Contrainte terminale à zéro : xk+N = 0
But : montre que la fonction de coût est décroissante
est une fonction de Lyapunov → stabilité au sens de Lyapunov
Remarque : le choix d’horizon de prédiction a un fort impact sur la région de faisabilité (le plus grand ensemble invariant contenant l’origine)
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS50
0),()( 00,01,0 xxJxJ optopt
0 àrester pour cout ,00instant l' àcout
,000,0
,,00
1
0,
1,101,0
1
0,
0
0,0
)0,0(),()(
),(),(),(
),()(~
)(
),()()(
quxqxJ
uxquxquxq
uxqxJxJ
uxqxFxJ
k
optopt
optNNopt
N
ioptii
N
ioptiiopt
N
ioptiiNopt
)(,0 xJ opt
Faisabilité et stabilité
Ensemble convexe des contraintes terminales :
Problème : la contrainte terminale à zéro xk+N = 0 diminue la région de faisabilité
Solution : utiliser un ensemble terminal invariant positif pour agrandir la région de
faisabilité
Faisabilité récursive :
On suppose , la séquence de commande
optimale à l’instant k = 0 et la trajectoire générée avec la séquence de
commande optimale
Pour k = 1, la séquence optimale de commande est faisable :
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS51
fNk Xx
fX
fX
NkXxXxssixu fkff ,)( 0
Un ensemble est un ensemble invariant positif pour le système en boucle fermée
xk+1 = f(xk , u), avec
)( faisable )( 000 Xxkxx },,,{ ,1,1,0 optNoptopt uuu
},,,{ 10 Nxxx
})(,,,{ ,1,1 xuu foptNopt
ffNkNkffN XxxxxXx )(et faisable)( 1 BA
Faisabilité et stabilité
Ensemble convexe des contraintes terminales :
4 conditions qui assurent la stabilité asymptotique de la loi de commande obtenue
1) contraintes sur l’état satisfaites en Xf
2) contraintes sur la commande satisfaites en Xf
3) Xf est positif invariant sous la commande
4) F est une fonction de Lyapunov sous
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS52
fNk Xx
fff XXXX 0fermé,,
ff XxUx ,)(
)(xu f
)(xffffkk XxXxxx ,)(1 BA
ffkkk XxxxqxFxF )),(,()()( 1
Faisabilité et stabilité : remarques
L’ensemble terminal assure la faisabilité et la stabilité
La région de faisabilité du problème d’optimisation sans contraintes terminales peut être plus
grande que celui du problème d’optimisation avec contraintes terminales, mais difficile à
caractériser
Xf = 0 est le plus simple choix possible, mais N ↓ la région d’attraction diminue
En pratique : augmenter N et vérifier la stabilité
N ↑ la région d’attraction approche l’ensemble invariant maximal
Un horizon de prédiction infini assure la stabilité et l’invariance
Approcher la solution à horizon infini en imposant l’appartenance de l’état final à un
ensemble invariant pour lequel existe une loi de commande invariante
Concepts applicables aux systèmes non-linéaires
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS53
Faisabilité et stabilité : remarques
Choix de l’ensemble terminal et du coût terminal : cas linéaire, norme quadratique
Sans contraintes :
Si P est choisie comme la solution de l’équation de Riccati correspondant à un coût à
horizon infini, et N = Nu, la solution sans contraintes correspond à celle obtenue avec le
critère à horizon infini.
Avec contraintes :
La solution avec horizon infini u = KLQR(x) peut être utilisée pour déterminer Xf comme
l’ensemble positif invariant maximal avec cette commande.
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS54
)( ,
1:0,,
1:0, àsujet
)(min:),(
1
1
0,
kxxXx
NiUuXx
Niuxx
RuuQxxPxxxJ
kfNk
ikik
ikikik
ik
T
ik
N
iik
T
ikNk
T
Nkkkoptkk
uu
BA
P. Boucher, D. Dumur, “La commande prédictive”, Collection Méthodes et pratiques de l’ingénieur,Editions Technip, Paris, 1996.
E.F. Camacho, C. Bordons, “Model predictive control”, Ed. Springer-Verlag, 2nd ed., London, 2004.
J. M. Maciejowski, “Predictive control with constraints”, Ed. Prentice Hall, Pearson Education Limited,Harlow, 2002.
J.A. Rossiter, “Model based predictive control. A practical approach”, CRC Press LLC, 2003.
J. Richalet, G. Lavielle, J. Mallet, “La commande prédictive. Mise en œuvre et applications industrielles”,Groupe Eyrolles, Paris, 2005.
P. Borne, G. Dauphin-Tanguy, J.P. Richard, F. Rotella, I. Zambettakis, “Automatique. Analyse et régulationdes processus industrielles (2) : Régulation numérique”, Ed. Technip, 1993.
I.D. Landau, “Commande des systèmes : conception, identification et mise en œuvre”, Ed. Hermès, 2002.
Rawlings J.B., Mayne D. Q., “Model Predictive Control : Theory and Design”, Nob Hill Publishing, 2009.
Huang S., Lee T. H., “Applied predictive control”, Springer Science & Business Media, 2013.
24/05/2017CA'NTI 23, BUCAREST, 22-26 MAI 2017
FACULTÉ D'AUTOMATIQUE ET ORDINATEURS55
Bibliographie






























