Embed Size (px)
Citation preview

1
Computação Gráfica
Projeção GeométricaTransformações 3D
Prof. Rodrigo [email protected]
Onde Estamos....
Introdução a Computação Gráfica;
Representação de Imagens: vetorial e matricial;
Dispositivos de entrada e saída;
Fundamentos de cor;
Transformações Geométricas no Plano;
Transformações Geométricas no Espaço;
Projeções Geométricas;
Representação e Modelagem;
Realismo Visual;
Introdução aos Filtros Digitais;
Noções de Percepção Visual Humana;
Amostragem e Quantização de Imagens
Transformadas de Imagens
Realce. Filtragem e Restauração
Codificação
Análise de Imagens e Noções de Visão Computacional.
2
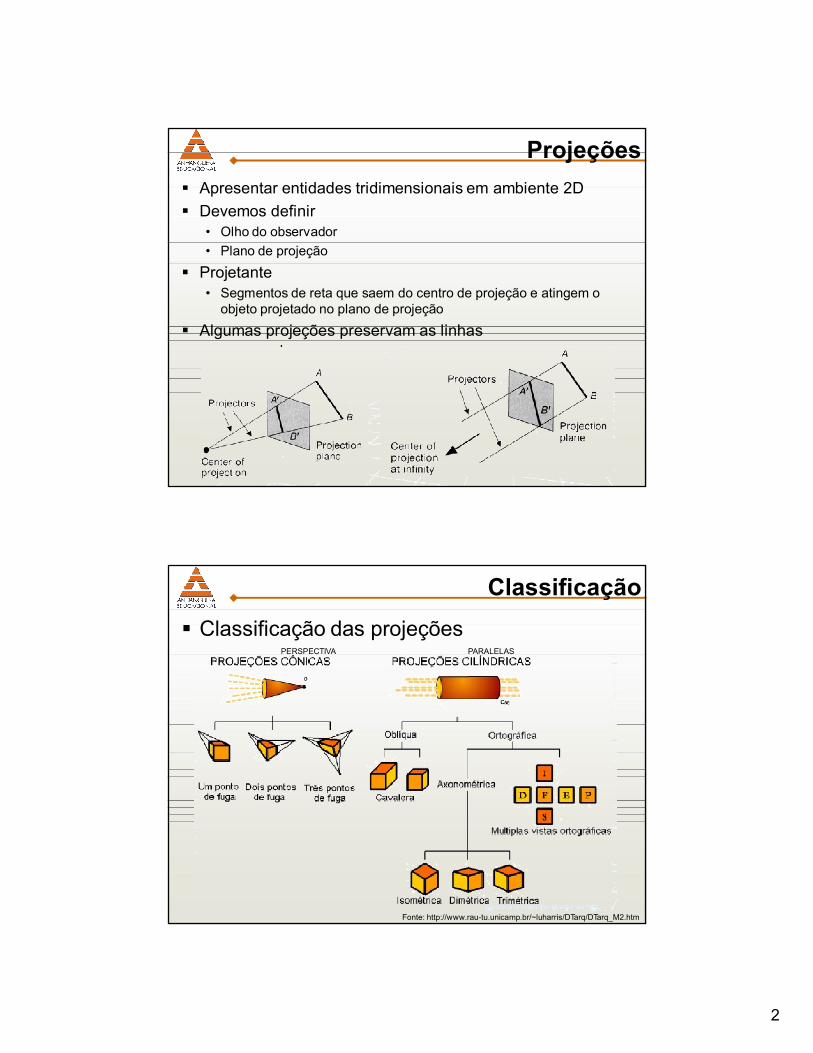
Projeções
Apresentar entidades tridimensionais em ambiente 2D
Devemos definir• Olho do observador
• Plano de projeção
Projetante• Segmentos de reta que saem do centro de projeção e atingem o
objeto projetado no plano de projeção
Algumas projeções preservam as linhas• Mas não necessariamente os ângulos
Classificação
Classificação das projeções
Fonte: http://www.rau-tu.unicamp.br/~luharris/DTarq/DTarq_M2.htm
PERSPECTIVA PARALELAS

3
Projeção Paralela ou Cilíndrica
Visão menos realística, pois não há escala
Entretando, as linhas paralelas continuam paralelas
Ângulos somente permanecem intactos para a face paralela ao plano de projeção
Tipos principais• Ortogonal
Direção da projeção é normal ao plano de projeção
• Oblíqua
Direção da projeção é diferente ao plano de projeção
Ortogonal
Projeções
• Frente, lado e cima
• Todas tem o plano de projeção perpendicular ao eixo principal
Ângulo e distância podem ser medidos Entretanto, somente uma face do objeto é mostrada
Difícil montar uma imagem mental do objeto

4
Ortogonal Axométricas
Raios de projeção perpendiculares ao plano de projeção• Entretanto as faces do objeto não estão paralelas ao plano de
projeção
Fórmula• Xp = xa*p1 + ya*q1
Yp = xa*p2 + ya*q2 + za*r2
Oblíqua
Características
• Raios de projeção são inclinados em relação ao plano de projeção
• Objetos podem ser visto melhor do que na ortogonal
• Posso medir distâncias mas não ângulos
• 2 tipos
Cavalier
Cabinet
Fórumula
• xs= x + z.l.cos a
• ys = y + z.l.sin a
5
Perspectiva
Efeito visual é semelhante ao sistema visual humano
Existe diminuição da perspectiva• Tamanho dos objetos é inversamente proporcional a distância do
centro de projeção
Fórmula• x'= vzdial * (x + vzdial_x ) / (z + vzdial) + x_stred y'= - vzdial * (y +
vzdial_y ) / (z + vzdial) + y_stred
Transformações 3D (espaço)
Transformações no espaço
• Translação
• Escala
• Rotação
6
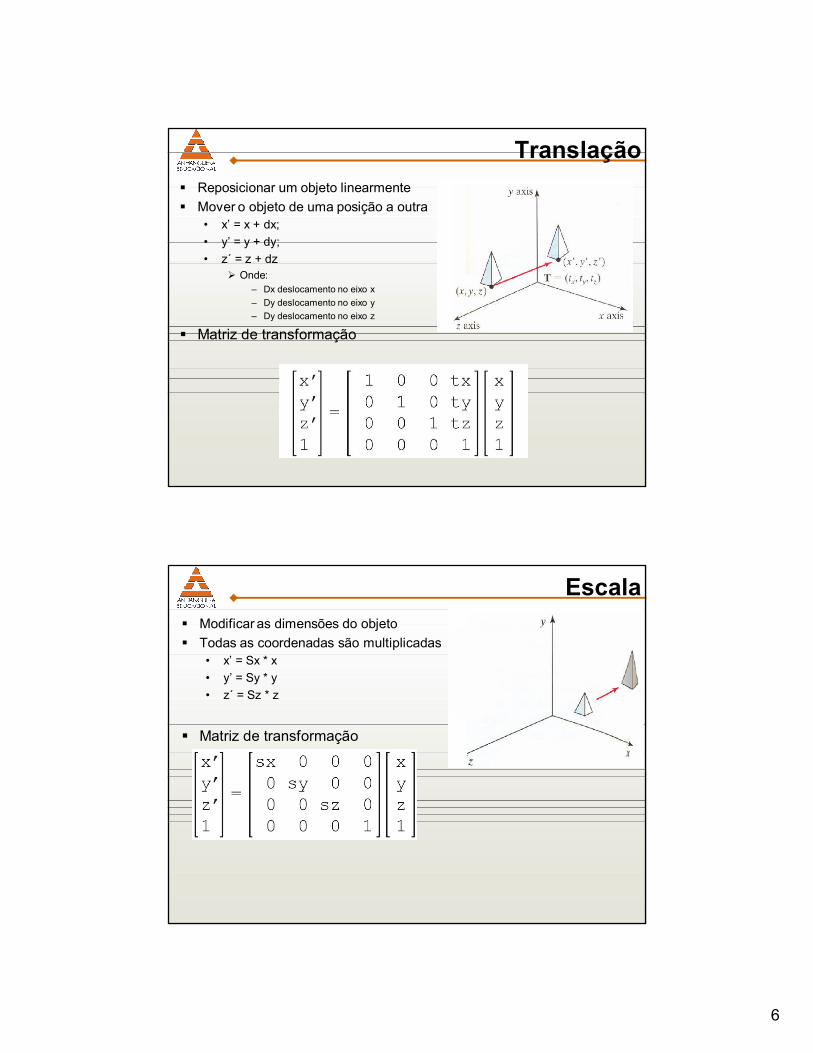
Translação
Reposicionar um objeto linearmente
Mover o objeto de uma posição a outra
• x’ = x + dx;
• y’ = y + dy;
• z´ = z + dz
Onde:
– Dx deslocamento no eixo x
– Dy deslocamento no eixo y
– Dy deslocamento no eixo z
Matriz de transformação
Escala
Modificar as dimensões do objeto
Todas as coordenadas são multiplicadas
• x’ = Sx * x
• y’ = Sy * y
• z´ = Sz * z
Matriz de transformação

7
Rotação (eixo z)
Rotacionar todas as coordenadas
Pontos são rotacionados
sobre o eixo
Matriz de transformação no eixo z
•x’ = x × cosθ – y × sinθ
•y’ = y × sinθ + y × cosθ
•z’ = z
Rotação (eixo x)
Rotacionar todas as coordenadas
Pontos são rotacionados
sobre o eixo
Matriz de transformação no eixo z
•y’ = y × cosθ – y × sinθ
•z’ = z × sinθ + y × cosθ
•x’ = x

8
Rotação (eixo y)
Rotacionar todas as coordenadas
Pontos são rotacionados
sobre o eixo
Matriz de transformação no eixo z
•z’ = z × cosθ – y × sinθ
•x’ = x × sinθ + y × cosθ
•y’ = y
Bibliografia
Livro texto (Programa do Livro texto - PLT)• FORBELLONE, A. Lógica de Programação. São Paulo: Pearson,
2005“
Complementar• CORMEN, Thomas H. Algoritmos: teoria e prática. 1.ed. Rio de
Janeiro: CAMPUS, 2002.
• MANZANO, J. A. N. G. Algoritmos: lógica para desenvolvimento de programação. 1.ed. São Paulo: Erica, 1996.
• ASTÊNCIO, A .F.G.; CAMPOS, E.D.. Fundamentos da Programação de Computadores. 1.ed. São Paulo: PRENTICE HALL BRASIL, 2002.