Embed Size (px)
Citation preview
CONEXAO DE FAZENDAS EOLICAS AO SISTEMA INTERLIGADO
NACIONAL POR LINHAS CA SEGMENTADAS
Guilherme Cavalcante Rubio
Projeto de Graduacao apresentado ao Corpo
Docente do Departamento de Engenharia
Eletrica da Escola Politecnica da Universidade
Federal do Rio de Janeiro, como parte dos
requisitos necessarios a obtencao do tıtulo de
Engenheiro Eletricista.
Orientador: Robson Francisco da Silva Dias
Rio de Janeiro
Marco de 2015
CONEXAO DE FAZENDAS EOLICAS AO SISTEMA INTERLIGADO
NACIONAL POR LINHAS CA SEGMENTADAS
Guilherme Cavalcante Rubio
PROJETO DE GRADUACAO SUBMETIDO AO CORPO DOCENTE
DO DEPARTAMENTO DE ENGENHARIA ELETRICA DA ESCOLA
POLITECNICA DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COMO PARTE DOS REQUISITOS NECESSARIOS PARA A OBTENCAO DO
GRAU DE ENGENHEIRO ELETRICISTA.
Examinado por:
Prof. Robson Francisco da Silva Dias, D.Sc.
Prof. Maurıcio Aredes, Dr.Ing.
Eng. Bruno Wanderley Franca, M.Sc.
RIO DE JANEIRO, RJ – BRASIL
MARCO DE 2015

Rubio, Guilherme Cavalcante
Conexao de fazendas eolicas ao Sistema Interligado
Nacional por linhas CA segmentadas / Guilherme
Cavalcante Rubio. – Rio de Janeiro: UFRJ/Escola
Politecnica, 2015.
XI, 53 p.: il.; 29, 7cm.
Orientador: Robson Francisco da Silva Dias
Projeto de Graduacao – UFRJ/Escola Politecnica/
Departamento de Engenharia Eletrica, 2015.
Referencias Bibliograficas: p. 42 – 43.
1. CA segmentada. 2. conversor back-to-back. 3.
energia eolica. 4. fontes renovaveis. I. Dias, Robson
Francisco da Silva. II. Universidade Federal do Rio de
Janeiro, Escola Politecnica, Departamento de Engenharia
Eletrica. III. Conexao de fazendas eolicas ao Sistema
Interligado Nacional por linhas CA segmentadas.
iii

Ao povo brasileiro. Que nunca
percamos a fe que nos motiva a
seguir sempre em frente.
iv
Agradecimentos
Agradeco ao orientador deste trabalho, Robson Dias, por sua paciencia e boa vontade
e por dividir comigo uma pequena parcela de sua experiencia de forma que este
trabalho fosse possıvel.
Agradeco ao professor Maurıcio Aredes e a todos os demais colegas do Labo-
ratorio de Eletronica de Potencia e Media Tensao por terem me acolhido no ambito
do laboratorio e me apresentado o mundo da Eletronica de Potencia.
Agradeco ao colega de laboratorio Bruno Franca pelas dicas valiosas para as
simulacoes em PSCAD.
Agradeco aos colegas de Furnas, Paulo Shor e Yuri Rosenblum, por disporem de
seu tempo e de seu conhecimento para me orientarem na representacao do Sistema
Interligado Nacional. Sem sua ajuda o modelo neste estudo nao teria ficado tao
detalhado.
Agradeco a todos os colegas e professores do curso de Engenharia Eletrica da
Universidade Federal do Rio de Janeiro pelo apoio ao longo do curso.
Agradeco aos meus familiares por terem incentivado minhas iniciativas desde
jovem, por terem sido minha base ao longo de todos esses anos. Agradeco princi-
palmente a minha mae Loide pelo seu otimismo constante, pelo seu altruısmo e por
me transmitir valores que carregarei comigo aonde for.
v

Resumo do Projeto de Graduacao apresentado a Escola Politecnica/UFRJ como
parte dos requisitos necessarios para a obtencao do grau de Engenheiro Eletricista
CONEXAO DE FAZENDAS EOLICAS AO SISTEMA INTERLIGADO
NACIONAL POR LINHAS CA SEGMENTADAS
Guilherme Cavalcante Rubio
Marco/2015
Orientador: Robson Francisco da Silva Dias
Departamento: Engenharia Eletrica
Este trabalho apresenta os conversores de tensao Back-to-Back (B2B) utilizados
em linhas de transmissao CA segmentada como solucao para os problemas de va-
riacoes de tensao observados nas barras do sistema em que sao conectadas usinas
eolicas. Observam-se problemas relacionados a geracao eolica decorrentes sobre-
tudo da intermitencia da geracao. Sabendo que inumeros empreendimentos eolicos
no Nordeste, em especial no Rio Grande do Norte, tem sido incluıdos nos leiloes
de energia de reserva da Empresa de Pesquisa Energetica (EPE) nos ultimos anos,
realizou-se uma analise da conexao de usinas eolicas a serem construıdas a barra Acu
II no Rio Grande do Norte por meio do conversor Back-to-Back. Este estudo foi
desenvolvido por meio de uma simulacao em PSCAD/EMTDC. Modelaram-se um
trecho de interesse do SIN em torno da barra de Acu II, as usinas eolicas presentes
na regiao e o conversor Back-to-Back com seu sistema de controle e observaram-se
as dinamicas eletricas do sistema perante a variacao de injecao de potencia pelas
usinas.
O conversor Back-to-Back para linhas segmentadas tem a capacidade de con-
trolar fluxo de potencia e nıvel de tensao no lado CA. Valendo-se desta aplicacao,
pretende-se utiliza-lo como forma de mitigar os efeitos negativos da intermitencia
da geracao eolica sobre a tensao na barra. Os resultados observados em simulacao
foram coerentes com o que era esperado da dinamica do sistema. O conversor B2B se
mostrou uma forma viavel de conectar as usinas radialmente ao Sistema Interligado.
vi
Sumario
Lista de Figuras ix
Lista de Tabelas xi
1 Introducao 1
1.1 Motivacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Geracao Eolica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.1 Detalhamento do aerogerador . . . . . . . . . . . . . . . . . . 2
1.2.2 A energia eolica na matriz energetica brasileira . . . . . . . . . 4
1.2.3 Viabilidade da geracao eolica . . . . . . . . . . . . . . . . . . 4
1.2.4 Conexao a rede eletrica . . . . . . . . . . . . . . . . . . . . . . 6
1.2.5 Impactos na rede eletrica . . . . . . . . . . . . . . . . . . . . . 6
1.3 Estrutura do Trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Transmissao CA segmentada e o conversor fonte de tensao Back-
to-Back (B2B-VSC) 8
2.1 Fundamentos do sistema de controle do conversor B2B . . . . . . . . 9
2.1.1 Logica de disparo das chaves - PWM . . . . . . . . . . . . . . 10
2.1.2 Circuito de sincronismo de fase (PLL) . . . . . . . . . . . . . 11
2.1.3 Mudanca de coordenadas abc-dq0 . . . . . . . . . . . . . . . . 11
2.1.4 Transformada ABC - αβ0 e a teoria de potencias instantaneas 13
2.1.5 Formulacao do sistema de controle do conversor B2B . . . . . 13
2.2 Modelo de simulacao do sistema de controle do conversor B2B para
linha CA segmentada . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3 Modelagem do sistema eletrico 22
3.1 Validacao do equivalente do sistema . . . . . . . . . . . . . . . . . . . 23
3.2 Modelagem de linhas de transmissao . . . . . . . . . . . . . . . . . . 26
3.3 Modelagem de usinas eolicas simplificadas . . . . . . . . . . . . . . . 27
3.3.1 Representacao por fonte de corrente controlada . . . . . . . . 27
3.3.2 Representacao das usinas ligadas a Acu II . . . . . . . . . . . 28
3.4 Conversor B2B-VSC em Acu II . . . . . . . . . . . . . . . . . . . . . 30
vii
4 Resultados e Discussoes 32
4.1 Simulacao sem o conversor de tensao Back-to-Back . . . . . . . . . . 33
4.2 Graficos do modelo de usina de Acu II sem conversor B2B . . . . . . 33
4.3 Simulacao com atuacao do conversor B2B-VSC . . . . . . . . . . . . 35
4.3.1 Graficos do modelo do conversor Back-to-Back . . . . . . . . . 35
4.3.2 Compensacao de afundamento de tensao por cargas conecta-
das a barra . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5 Conclusoes 39
Referencias Bibliograficas 42
A Parametros utilizados na modelagem do sistema eletrico de
potencia 44
A.1 Linhas em modelo pi concentrado para validacao do equivalente,
transformadores e impedancias de transferencia . . . . . . . . . . . . 45
A.2 Linhas de transmissao modeladas com parametros distribuıdos e de-
pendentes da frequencia . . . . . . . . . . . . . . . . . . . . . . . . . 45
B Modelo de aerogeradores sıncronos de ımas permanentes (PMSG)
para simulacao de transitorios eletromecanicos 49
B.1 Modelo eletromecanico do aerogerador . . . . . . . . . . . . . . . . . 50
B.2 Sistema de controle do conversor B2B de interface com a rede eletrica 51
viii
Lista de Figuras
1.1 Fotografia de um aerogerador de eixo horizontal . . . . . . . . . . . . 3
1.2 Ilustracao da conexao dos aerogeradores a rede eletrica . . . . . . . . 6
2.1 Conversor Back-to-Back para linhas CA segmentadas . . . . . . . . . 9
2.2 Conversor CC-CA componente do B2B-VSC . . . . . . . . . . . . . . 9
2.3 Diagrama completo do sistema de controle do conversor B2B . . . . . 10
2.4 Conversor de tensao B2B-VSC para linha CA segmentada . . . . . . 14
2.5 Diagrama de blocos referente a malha de controle de corrente . . . . . 16
2.6 Diagrama simplificdo referente a malha de controle de corrente . . . . 16
2.7 Diagrama de simulacao do conversor B2B-VSC . . . . . . . . . . . . . 18
2.8 Conversor CA-CC modelado em PSCAD . . . . . . . . . . . . . . . . 19
2.9 Bloco 1: Calculo de referencias para o VSC1 . . . . . . . . . . . . . . 19
2.10 Bloco 2: Malha de controle de corrente do VSC1 . . . . . . . . . . . . 19
2.11 Bloco 1: Calculo de referencias para o VSC2 . . . . . . . . . . . . . . 20
2.12 Bloco 2: Malha de controle de corrente do VSC2 . . . . . . . . . . . . 20
2.13 Modulo PWM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.1 Modelo do trecho de interesse do sistema eletrico . . . . . . . . . . . 23
3.2 Diagrama feito no SAPRE com as barras do trecho de interesse do
sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.3 Linha de transmissao do trecho de interesse do sistema para validacao
do equivalente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.4 Transformador ligando duas barras proximas com nıveis de tensao
diferentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.5 Representacao das fontes de tensao equivalentes . . . . . . . . . . . . 24
3.6 Representacao da impedancia de transferencia . . . . . . . . . . . . . 24
3.7 Representacao da impedancia de transferencia para bases diferentes
de tensao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.8 Modelo detalhado de linha de transmissao dependente da frequencia . 26
3.9 Modelo dependente da frequencia para linha de transmissao em 500kV 26
3.10 Modelo dependente da frequencia para linha de transmissao em 230kV 27
ix
3.11 Representacao simplificada de usina eolica conectada ao sistema eletrico 27
3.12 Modelo de usina eolica como fonte de corrente controlada por potencia 28
3.13 Modulo que contem o modelo de usina eolica ligada a Acu II . . . . . 29
3.14 Diagrama do modulo que representa a interface entre o gerador
sıncrono de polos permanentes e a rede eletrica . . . . . . . . . . . . 29
3.15 Modelo de usina eolica como fonte de corrente com conversor CC-CA 29
3.16 Malha de controle da tensao no elo CC . . . . . . . . . . . . . . . . . 30
3.17 Sistema modificado de controle do VSC1 . . . . . . . . . . . . . . . . 31
3.18 Modulo representativo do conversor fonte de tensao Back to Back . . 31
4.1 Nıvel de tensao eficaz na barra de Acu 2 sem conversor B2B na linha 33
4.2 Tensao no elo CC no modelo de usina eolica de Acu II . . . . . . . . 34
4.3 Potencia medida na saıda do modelo de usina eolica . . . . . . . . . . 34
4.4 Tensao e corrente medidas na saıda da usina eolica . . . . . . . . . . 34
4.5 Detalhe da tensao e da corrente medidas na saıda da usina eolica . . 34
4.6 Indice de distorcao harmonica (THD) de tensao e de corrente na saıda
do conversor da usina eolica . . . . . . . . . . . . . . . . . . . . . . . 34
4.7 Nıvel de tensao eficaz na barra de Acu 2 com regulacao de tensao . . 35
4.8 Nıvel de tensao no elo CC do conversor B2B . . . . . . . . . . . . . . 36
4.9 Potencia medida na saıda do VSC2 . . . . . . . . . . . . . . . . . . . 36
4.10 Tensao e corrente na saıda do VSC1 . . . . . . . . . . . . . . . . . . . 36
4.11 Tensao e corrente na saıda do VSC2 . . . . . . . . . . . . . . . . . . . 36
4.12 Indices de distorcao harmonica . . . . . . . . . . . . . . . . . . . . . . 36
4.13 Afundamento de tensao causado pelo reator shunt . . . . . . . . . . . 37
4.14 Tensao no elo CC durante grande afundamento de tensao . . . . . . . 37
4.15 THD de tensao e de corrente durante afundamento de tensao . . . . . 38
B.1 Modelo de simulacao de um aerogerador sıncrono de ımas permanen-
tes conectado ao SIN . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
B.2 Circuito de potencia de um aerogerador sıncrono de ıma permanente
(PMSG) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
B.3 Modelo eletromecanico do aerogerador sıncrono de ımas permanentes 50
B.4 Malha de controle de velocidade mecanica do aerogerador . . . . . . . 51
B.5 Malha de controle da tensao no elo CC . . . . . . . . . . . . . . . . . 52
x
Lista de Tabelas
2.1 Ganhos dos controladores PI do conversor B2B . . . . . . . . . . . . 21
3.1 Valores de curtos-circuito simulados pelo SAPRE e pelo PSCAD . . . 25
3.2 Bases de potencia utilizadas para representacoes de usinas eolicas
simplificadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3 Parametros de controladores PI utilizados nas representacoes simpli-
ficadas de usinas eolicas . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.1 Instantes de ligamento de cada parte do sistema . . . . . . . . . . . . 32
A.1 Equivalencia entre numeracao das barras atribuıda pelo ONS e os
nomes das barras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
A.2 Parametros utilizados na representacao de linhas de transmissao em
modelo pi e de transformadores . . . . . . . . . . . . . . . . . . . . . 46
A.3 Elementos componentes do equivalente do sistema inseridos na si-
mulacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
A.4 Cabos utilizados e comprimentos das linhas de transmissao . . . . . . 48
xi
Capıtulo 1
Introducao
1.1 Motivacao
A expansao constante do consumo de energia eletrica no Brasil implica a necessidade
do aumento da capacidade de geracao. A preocupacao da sociedade com o meio
ambiente e a busca pelo desenvolvimento sustentavel incentivam o desenvolvimento
de fontes alternativas de energia que causam um impacto ambiental reduzido. Dentre
as formas de geracao adotadas no Brasil, a eolica se destaca pela sua grande adesao.
O mercado eolico esta se ampliando significativamente e tem se mostrado cada vez
mais promissor. Diversos empreendimentos de usinas eolicas estao surgindo na regiao
Nordeste do Paıs. A grande concentracao dessa fonte intermitente incentiva a busca
por formas eficientes de integrar esta capacidade de geracao a rede eletrica.
A matriz energetica brasileira atualmente e composta predominantemente por
usinas hidreletricas e o Sistema Interligado Nacional (SIN). A insercao da geracao
eolica no sistema traz consigo novos desafios para o controle do SIN, devido a in-
termitencia da geracao eolica. Por consequencia, surge a necessidade de formas
diferentes de realizar o controle de fluxo de potencia e o controle de tensao. Algu-
mas das solucoes propostas indicam dispositivos FACTS (Flexible AC Transmission
Systems) para realizarem este controle, como e o caso do SVC (Static Var Compen-
sator) e o STATCOM (Static Synchronous Compensator) [1]. No entanto, por esses
dispositivos serem conectados em paralelo a barra de conexao, qualquer disturbio
proveniente da geracao eolica e propagado para o sistema.
Neste contexto, este trabalho propoe a conexao de parques eolicos a rede brasi-
leira por meio de linhas CA segmentadas, seccionadas por um conversor de tensao
Back-to-Back (B2B-VSC ) como forma de compensar principalmente os efeitos de
variacoes de tensao decorrentes da intermitencia do fluxo de potencia. A linha seg-
mentada por conversor Back-to-Back e uma estrutura que reune vantagens do sis-
tema de transmissao em corrente contınua, como a flexibilidade e o controle rapido
1

da potencia ativa, e vantagens do sistema de transmissao em corrente alternada,
como a simplicidade do sistema de protecao da linha. O conversor desacopla os dois
trechos da linha segmentada em relacao a frequencia e ao nıvel de tensao, impedindo
a propagacao de perturbacoes no sincronismo do sistema, preservando a estabilidade
do trecho sao. O B2B-VSC tambem e capaz de controlar o fluxo de potencia na linha
e oferecer suporte de reativo para controlar o nıvel de tensao, exercendo a mesma
funcao de um compensador estatico como um STATCOM ou SVC. Alem disso, o
conversor pode ser construıdo em modulos e caso seja necessario expandir a geracao
dos parques eolicos conectados, e possıvel adicionar outros modulos conversores.
A proposta apresentada e colocada a prova por meio de um estudo qualitativo
da conexao das usinas eolicas situadas a barra de Acu II no estado do Rio Grande
do Norte. Esta regiao do Sistema Interligado Nacional foi escolhida devido a grande
concentracao de usinas eolicas e pelo numero consideravel de empreendimentos em
geracao eolica inscritos nos ultimos leiloes da EPE para o estado.
1.2 Geracao Eolica
A geracao eolica e uma forma nao poluente de geracao de energia eletrica que utiliza a
energia do movimento das correntes de ar. O processo de conversao eletromecanica
de energia se da por meio dos aerogeradores, grandes estruturas dotadas de pas
que sao submetidas ao torque causado pelos ventos. Devido ao comportamento
dinamico dos ventos e a incapacidade de se criar um reservatorio eolico, a energia
gerada varia bastante ao longo do dia e possui uma confiabilidade muito menor que
as usinas hidreletricas com reservatorio e que as usinas termeletricas em geral. Essa
intermitencia da geracao energetica faz com que hoje ela se limite apenas a geracao
complementar e acarreta algumas complicacoes na interacao com o sistema eletrico.
Em relacao ao impacto ambiental causado pelas usinas eolicas, elas nao alteram
o relevo do terreno e o curso de rios como o fazem as usinas hidreletricas, nao emitem
poluentes como as usinas termeletricas movidas a combustıveis fosseis. Apesar de
possuir vantagens ambientais em relacao as outras formas de geracao, os aerogera-
dores podem causar a morte de aves e morcegos da regiao, devido a altura em que
ficam as pas, alem de produzirem intenso ruıdo sonoro. Assim como em qualquer
outra intervencao humana na paisagem natural, e importante que a construcao de
usinas eolicas seja precedida por um estudo de impactos ambientais.
1.2.1 Detalhamento do aerogerador
A figura 1.1 mostra um aerogerador de eixo horizontal de uma usina eolica.
O aerogerador e composto pelos elementos: torre, rotor, pas, nacele, caixa de
2
Figura 1.1: Fotografia de um aerogerador de eixo horizontal
transmissao, gerador, sistemas de controle, anemometro e sensor de direcao.
• Torre: E a estrutura que mantem o conjunto dos elementos na posicao ver-
tical adequada para a captacao dos ventos pelas pas. Podem ser trelicadas,
tubulares ou de concreto, estaiadas ou auto-portantes.
• Rotor: Peca em que sao fixadas as pas, transmite a energia mecanica ao eixo
do gerador, podendo passar por uma caixa de transmissao.
• Pas: Fazem a captacao da energia mecanica do vento e colocam o rotor em
movimento. Podem estar conectadas a um eixo horizontal ou a um eixo verti-
cal.
• Nacele: E o compartimento instalado na torre que abriga os elementos do
sistema de conversao eletromecanica de energia.
• Caixa de transmissao: Pode ser instalada entre o eixo do rotor e o gerador.
Possui um conjunto de engrenagens que transmite a energia transformando a
velocidade mecanica do eixo das pas para um nıvel de velocidade mecanica
adequado ao gerador.
• Gerador: E a parte que realiza a conversao eletromecanica de energia. Podem
ser maquinas de inducao ou maquinas sıncronas. Podem ser ligados direta-
3
mente a rede, forcando a operacao em velocidade constante, ou por meio de
um conversor eletronico.
• Sistemas de controle: Realiza o controle da velocidade, rastreamento do
ponto de operacao de maxima potencia, etc.
• Anemometro: Mede a velocidade dos ventos.
• Sensor de direcao: Detecta a direcao do vento. E importante conhecer a
direcao para alinhar o eixo perpendicularmente a incidencia do vento, maxi-
mizando a captacao de energia.
1.2.2 A energia eolica na matriz energetica brasileira
O Balanco Energetico Nacional [2] mais recente, realizado em 2014 para o ano base
de 2013, aponta que a porcentagem da energia gerada anual correspondente a fonte
eolica passou de 0,9% em 2012 para apenas 1,1% em 2013. Por outro lado, a geracao
hidraulica predominante no sistema passou de 76,9% em 2012 para 70,6% em 2013,
devido as condicoes hidraulicas desfavoraveis. A reducao de geracao hidraulica im-
plicou um aumento da participacao de combustıveis fosseis de 12,8% em 2012 para
18,3% em 2013. O uso elevado de combustıveis fosseis e a escassez de recursos
hıdricos que se estende ate o inıcio do ano de publicacao deste trabalho sao for-
tes motivadores da busca por fontes complementares de geracao. Dentre as fontes
complementares, a geracao eolica vem recebendo bastante atencao ultimamente.
Segundo a Empresa de Pesquisa Energetica (EPE), no Leilao de Energia de Re-
serva (LER) em 2014 foram cadastrados 626 empreendimentos de usinas eolicas,
totalizando 15356MW de oferta de geracao, sendo 104 desses empreendimentos usi-
nas a serem construıdas no estado do Rio Grande do Norte. O leilao preve a entrega
de energia a partir de 2017.
O Brasil possui um potencial abundante de exploracao da energia eolica em sua
costa e em algumas regioes montanhosas. O Atlas do Potencial Eolico Brasileiro [3]
fornecido pelo CRESESB indica ainda que os estados do Rio Grande do Norte e da
Bahia sao dotados de grande fluxo de potencia eolico anual quando comparados aos
demais estados brasileiros.
1.2.3 Viabilidade da geracao eolica
O vento e a movimentacao do ar atmosferico e se forma principalmente devido
aos gradientes de pressao atmosferica resultantes do aquecimento diferencial da su-
perfıcie terrestre e das camadas de ar. A aceleracao sofrida por uma massa de ar
4

causada pelo gradiente de pressao e dada por:
−→Fp
m=−1
ρ∇p (1.1)
Onde p e a pressao em um determinado ponto da atmosfera, ρ e a massa especıfica
do ar neste local,−→Fp e a forca atuante sobre a massa de ar m.
A forca da gravidade e a forca de atrito viscoso tambem atuam sobre as massas
de ar e nao podem ser desprezadas. Elas nao colocam o ar em movimento, mas
alteram sua direcao e velocidade. A aceleracao resultante sobre uma massa de ar
corresponde a: −→Dv
Dt=−1
ρ∇p+−→g +
−→Fa (1.2)
Onde
−→Dv
Dte a derivada direcional da velocidade em relacao ao tempo, g e a
aceleracao da gravidade e−→Fa e a forca de atrito viscoso do ar por unidade de massa.
O vento que move os geradores eolicos ocorre proximo a superfıcie terrestre e
e influenciado pelo formato da superfıcie, relevo e por obstaculos como florestas
e construcoes. Define-se como rugosidade da superfıcie a propriedade fısica que
descreve a relacao entre a velocidade de escoamento do vento e a altitude em relacao
ao solo. Quanto mais obstaculos a passagem do vento houver no terreno, maior se
torna sua rugosidade. A regiao situada entre a superfıcie e o nıvel de altitude em
que a rugosidade deixa de influenciar o escoamento do ar e chamada de camada
limite.
Ha uma relacao que determina a velocidade dos ventos em funcao da altura dada
por:−→V =
−→V0
H
Hn0
(1.3)
Onde V e a velocidade do vento a uma altura H.−→V0 e uma velocidade conhecida
em uma altura de referencia H0 e n e o fator de rugosidade do terreno. Os aero-
geradores de eixo horizontal geralmente possuem torres que variam de 50m a 120m
de altura, para captar o vento com a menor influencia possıvel da rugosidade do
terreno.
Uma serie de estudos deve ser realizada para determinar se a instalacao de usinas
eolicas em uma regiao e viavel economicamente e para pesar o efeito dos impactos
ambientais. Primeiramente devem ser realizadas medicoes da velocidade do vento
e da densidade de energia no local em que serao instalados os aerogeradores. As
medicoes devem ser realizadas ao longo de um extenso perıodo de tempo pois as
condicoes do vento variam muito ao longo do ano.
A forma do terreno deve ser favoravel a passagem dos ventos. Nao podem haver
5
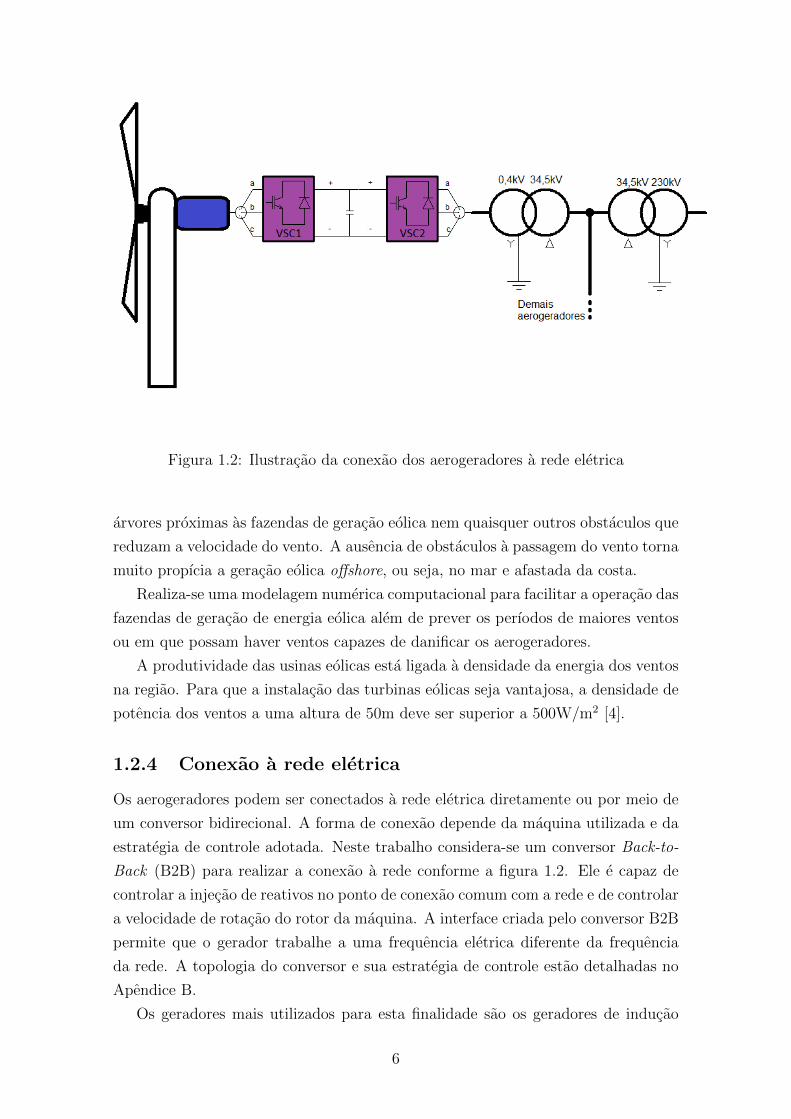
Figura 1.2: Ilustracao da conexao dos aerogeradores a rede eletrica
arvores proximas as fazendas de geracao eolica nem quaisquer outros obstaculos que
reduzam a velocidade do vento. A ausencia de obstaculos a passagem do vento torna
muito propıcia a geracao eolica offshore, ou seja, no mar e afastada da costa.
Realiza-se uma modelagem numerica computacional para facilitar a operacao das
fazendas de geracao de energia eolica alem de prever os perıodos de maiores ventos
ou em que possam haver ventos capazes de danificar os aerogeradores.
A produtividade das usinas eolicas esta ligada a densidade da energia dos ventos
na regiao. Para que a instalacao das turbinas eolicas seja vantajosa, a densidade de
potencia dos ventos a uma altura de 50m deve ser superior a 500W/m2 [4].
1.2.4 Conexao a rede eletrica
Os aerogeradores podem ser conectados a rede eletrica diretamente ou por meio de
um conversor bidirecional. A forma de conexao depende da maquina utilizada e da
estrategia de controle adotada. Neste trabalho considera-se um conversor Back-to-
Back (B2B) para realizar a conexao a rede conforme a figura 1.2. Ele e capaz de
controlar a injecao de reativos no ponto de conexao comum com a rede e de controlar
a velocidade de rotacao do rotor da maquina. A interface criada pelo conversor B2B
permite que o gerador trabalhe a uma frequencia eletrica diferente da frequencia
da rede. A topologia do conversor e sua estrategia de controle estao detalhadas no
Apendice B.
Os geradores mais utilizados para esta finalidade sao os geradores de inducao
6
trifasico gaiola de esquilo, os geradores de inducao com rotor bobinado, os geradores
de relutancia variavel e os geradores sıncronos. Os geradores escolhidos para este
trabalho sao os Geradores Sıncronos de Imas Permanentes (GSIP) de polos lisos.
O GSIP possui ımas permanentes no rotor ao inves de enrolamentos de campo,
nao havendo a necessidade de circuitos externos de excitacao do campo. O estator da
maquina e a parte que se liga a rede eletrica, eliminando a necessidade de escovas,
evitando centelhamento e aumentando a vida util da peca. Por nao possuir um
enrolamento de excitacao, uma subita desconexao com a rede nao induz sobretensoes
no rotor.
1.2.5 Impactos na rede eletrica
A insercao de usinas eolicas em grande quantidade a rede eletrica pode ocasionar
alguns problemas para o sistema devido a intermitencia da geracao. Dentre os
problemas mais comuns, destacam-se [5]:
• Variacoes de tensao, observando-se inclusive o efeito de cintilacao (flicker).
• Variacoes de fator de potencia.
• Flutuacoes de tensao, caracterizadas por variacoes aleatorias e rapidas do nıvel
de tensao CA, ocasionadas por turbulencias, sombreamento de aerogeradores e
erros relacionados ao passo das pas e a mudanca de direcao dos aerogeradores.
• Transitorios de tensao e corrente durante o acionamento e durante o desliga-
mento dos aerogeradores.
Todos os problemas destacados se relacionam com variacoes de tensao na barra
conectada a usina e sao mais preocupantes em redes fracas. O controle de tensao deve
ser realizado localmente em cada ponto do sistema que apresente uma fragilidade.
Neste contexto nao se pode utilizar um banco fixo de reativos para corrigir o fator
de potencia e as variacoes de tensao, devido a intermitencia da geracao. Para tal se
faz necessario um metodo automatizado de correcao, como o que e proposto neste
trabalho.
1.3 Estrutura do Trabalho
Este documento foi dividido em cinco capıtulos. Cada capıtulo aborda detalhada-
mente um componente do trabalho realizado de forma a simplificar o entendimento
do projeto.
7

Este capıtulo introdutorio apresenta aspectos da geracao eolica, como a im-
portancia dessa forma de geracao para a matriz energetica brasileira, o impacto am-
biental proveniente dela e os componentes dos aerogeradores. O capıtulo 2 detalha o
conversor Back-to-Back, e seu sistema de controle. O capıtulo 3 descreve a modela-
gem do trecho de interesse do Sistema Interligado Nacional utilizando o sotfware de
simulacao PSCAD/EMTDC do desenvolvedor Manitoba HVDC. O capıtulo 4 apre-
senta os resultados obtidos das simulacoes e testa a validade da solucao proposta. O
capıtulo 5 apresenta as conclusoes e os trabalhos futuros que surgirao deste estudo.
8
Capıtulo 2
Transmissao CA segmentada e o
conversor fonte de tensao
Back-to-Back (B2B-VSC)
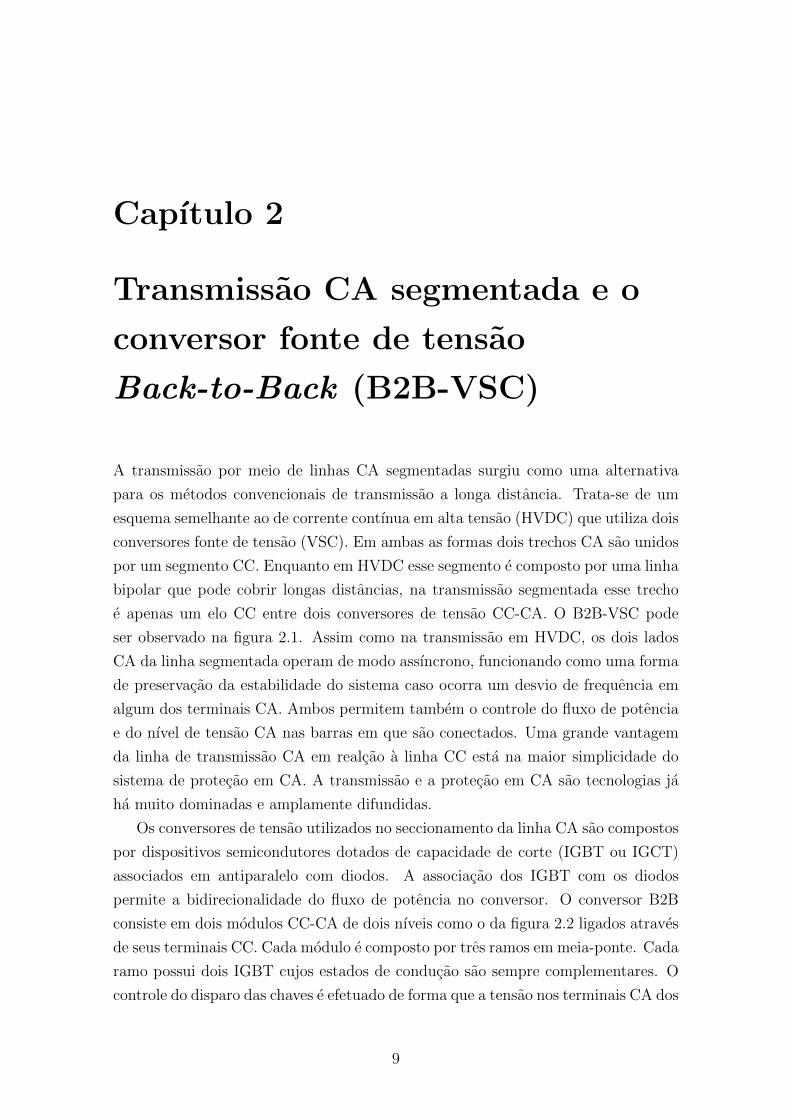
A transmissao por meio de linhas CA segmentadas surgiu como uma alternativa
para os metodos convencionais de transmissao a longa distancia. Trata-se de um
esquema semelhante ao de corrente contınua em alta tensao (HVDC) que utiliza dois
conversores fonte de tensao (VSC). Em ambas as formas dois trechos CA sao unidos
por um segmento CC. Enquanto em HVDC esse segmento e composto por uma linha
bipolar que pode cobrir longas distancias, na transmissao segmentada esse trecho
e apenas um elo CC entre dois conversores de tensao CC-CA. O B2B-VSC pode
ser observado na figura 2.1. Assim como na transmissao em HVDC, os dois lados
CA da linha segmentada operam de modo assıncrono, funcionando como uma forma
de preservacao da estabilidade do sistema caso ocorra um desvio de frequencia em
algum dos terminais CA. Ambos permitem tambem o controle do fluxo de potencia
e do nıvel de tensao CA nas barras em que sao conectados. Uma grande vantagem
da linha de transmissao CA em realcao a linha CC esta na maior simplicidade do
sistema de protecao em CA. A transmissao e a protecao em CA sao tecnologias ja
ha muito dominadas e amplamente difundidas.
Os conversores de tensao utilizados no seccionamento da linha CA sao compostos
por dispositivos semicondutores dotados de capacidade de corte (IGBT ou IGCT)
associados em antiparalelo com diodos. A associacao dos IGBT com os diodos
permite a bidirecionalidade do fluxo de potencia no conversor. O conversor B2B
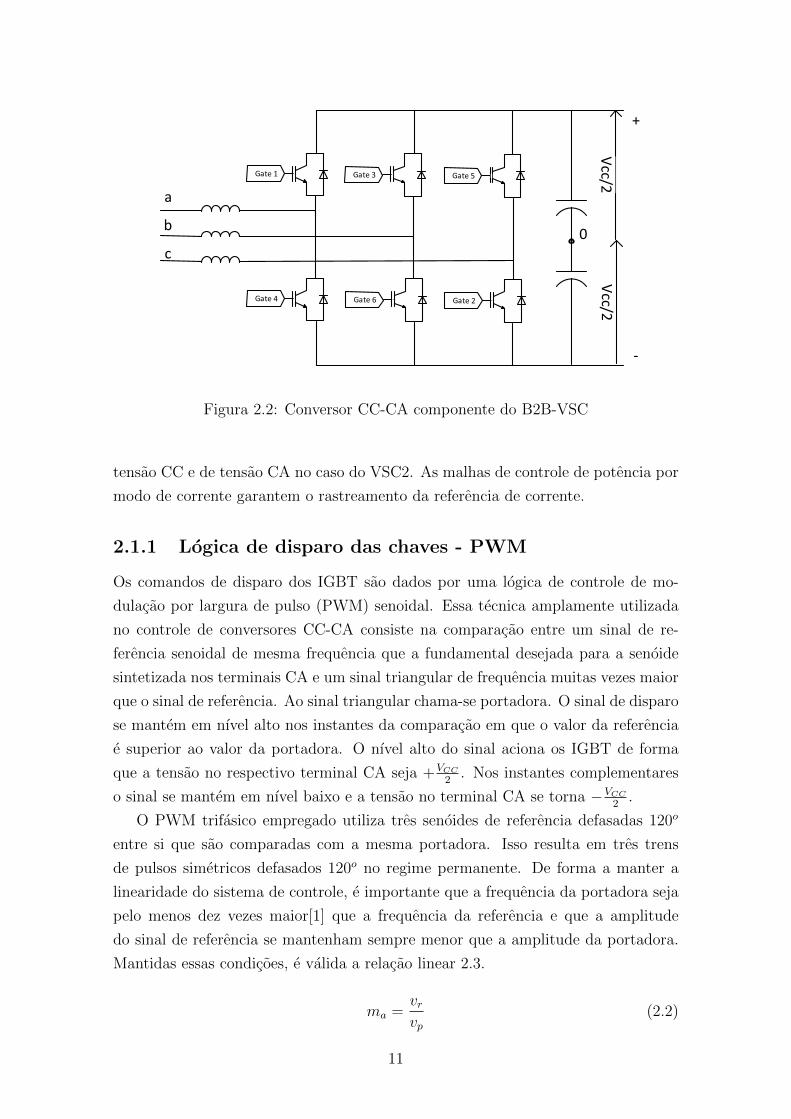
consiste em dois modulos CC-CA de dois nıveis como o da figura 2.2 ligados atraves
de seus terminais CC. Cada modulo e composto por tres ramos em meia-ponte. Cada
ramo possui dois IGBT cujos estados de conducao sao sempre complementares. O
controle do disparo das chaves e efetuado de forma que a tensao nos terminais CA dos
9
Sistema elétrico de potênciaBarra 2
Conversor CA-CCSistema elétrico de potênciaBarra 1
Conversor CC-CA
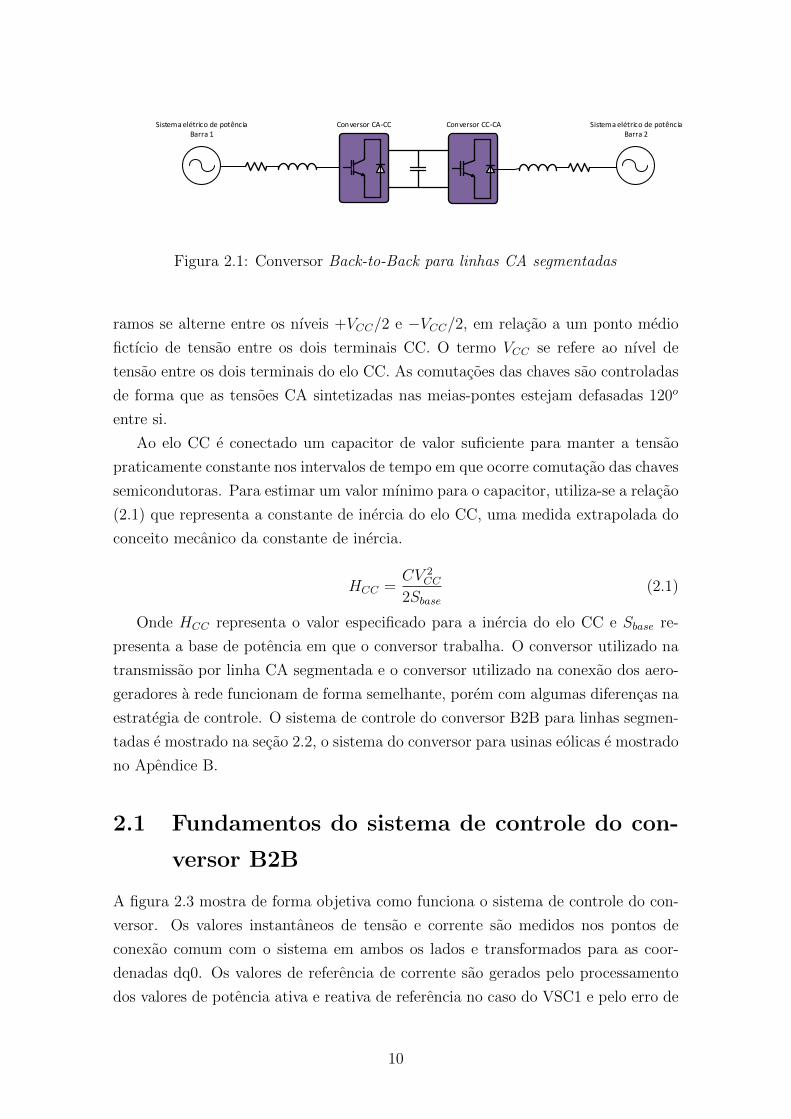
Figura 2.1: Conversor Back-to-Back para linhas CA segmentadas
ramos se alterne entre os nıveis +VCC/2 e −VCC/2, em relacao a um ponto medio
fictıcio de tensao entre os dois terminais CC. O termo VCC se refere ao nıvel de
tensao entre os dois terminais do elo CC. As comutacoes das chaves sao controladas
de forma que as tensoes CA sintetizadas nas meias-pontes estejam defasadas 120o
entre si.
Ao elo CC e conectado um capacitor de valor suficiente para manter a tensao
praticamente constante nos intervalos de tempo em que ocorre comutacao das chaves
semicondutoras. Para estimar um valor mınimo para o capacitor, utiliza-se a relacao
(2.1) que representa a constante de inercia do elo CC, uma medida extrapolada do
conceito mecanico da constante de inercia.
HCC =CV 2
CC
2Sbase(2.1)
Onde HCC representa o valor especificado para a inercia do elo CC e Sbase re-
presenta a base de potencia em que o conversor trabalha. O conversor utilizado na
transmissao por linha CA segmentada e o conversor utilizado na conexao dos aero-
geradores a rede funcionam de forma semelhante, porem com algumas diferencas na
estrategia de controle. O sistema de controle do conversor B2B para linhas segmen-
tadas e mostrado na secao 2.2, o sistema do conversor para usinas eolicas e mostrado
no Apendice B.
2.1 Fundamentos do sistema de controle do con-
versor B2B
A figura 2.3 mostra de forma objetiva como funciona o sistema de controle do con-
versor. Os valores instantaneos de tensao e corrente sao medidos nos pontos de
conexao comum com o sistema em ambos os lados e transformados para as coor-
denadas dq0. Os valores de referencia de corrente sao gerados pelo processamento
dos valores de potencia ativa e reativa de referencia no caso do VSC1 e pelo erro de
10
a
b
c
Vcc/2
Vcc/2
0
+
-
Figura 2.2: Conversor CC-CA componente do B2B-VSC
tensao CC e de tensao CA no caso do VSC2. As malhas de controle de potencia por
modo de corrente garantem o rastreamento da referencia de corrente.
2.1.1 Logica de disparo das chaves - PWM
Os comandos de disparo dos IGBT sao dados por uma logica de controle de mo-
dulacao por largura de pulso (PWM) senoidal. Essa tecnica amplamente utilizada
no controle de conversores CC-CA consiste na comparacao entre um sinal de re-
ferencia senoidal de mesma frequencia que a fundamental desejada para a senoide
sintetizada nos terminais CA e um sinal triangular de frequencia muitas vezes maior
que o sinal de referencia. Ao sinal triangular chama-se portadora. O sinal de disparo
se mantem em nıvel alto nos instantes da comparacao em que o valor da referencia
e superior ao valor da portadora. O nıvel alto do sinal aciona os IGBT de forma
que a tensao no respectivo terminal CA seja +VCC
2. Nos instantes complementares
o sinal se mantem em nıvel baixo e a tensao no terminal CA se torna −VCC
2.
O PWM trifasico empregado utiliza tres senoides de referencia defasadas 120o
entre si que sao comparadas com a mesma portadora. Isso resulta em tres trens
de pulsos simetricos defasados 120o no regime permanente. De forma a manter a
linearidade do sistema de controle, e importante que a frequencia da portadora seja
pelo menos dez vezes maior[1] que a frequencia da referencia e que a amplitude
do sinal de referencia se mantenham sempre menor que a amplitude da portadora.
Mantidas essas condicoes, e valida a relacao linear 2.3.
ma =vrvp
(2.2)
11
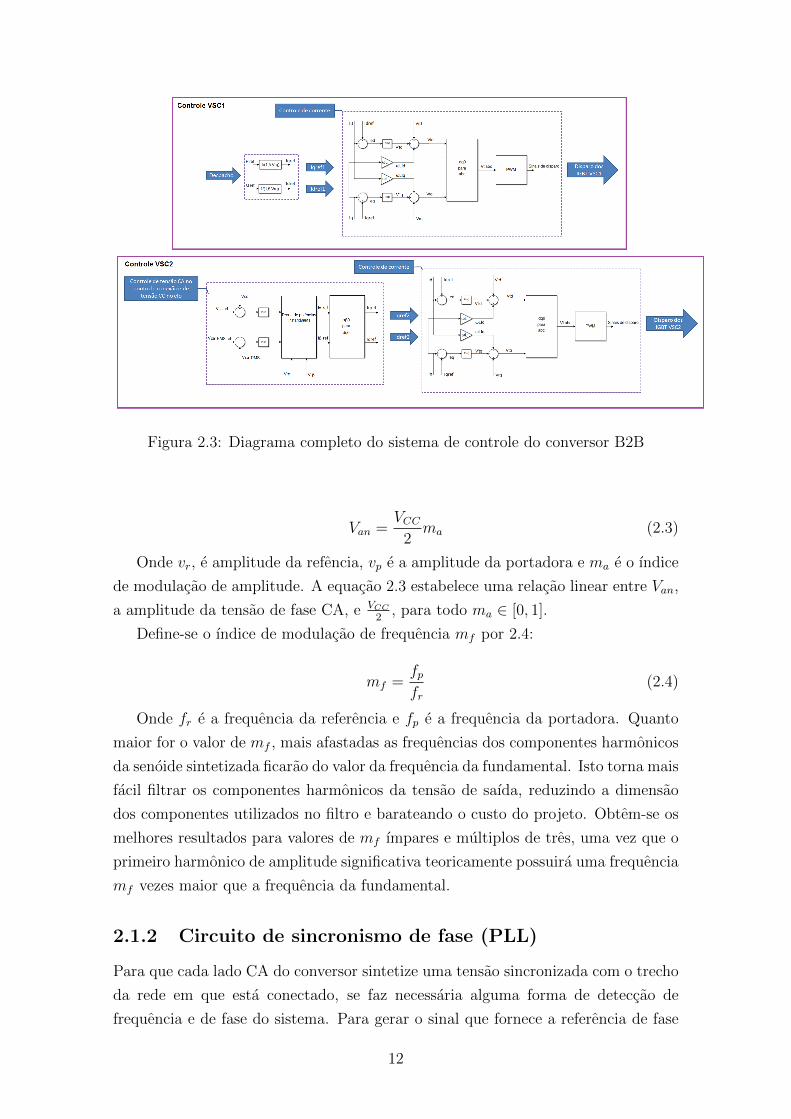
Figura 2.3: Diagrama completo do sistema de controle do conversor B2B
Van =VCC
2ma (2.3)
Onde vr, e amplitude da refencia, vp e a amplitude da portadora e ma e o ındice
de modulacao de amplitude. A equacao 2.3 estabelece uma relacao linear entre Van,
a amplitude da tensao de fase CA, e VCC
2, para todo ma ∈ [0, 1].
Define-se o ındice de modulacao de frequencia mf por 2.4:
mf =fpfr
(2.4)
Onde fr e a frequencia da referencia e fp e a frequencia da portadora. Quanto
maior for o valor de mf , mais afastadas as frequencias dos componentes harmonicos
da senoide sintetizada ficarao do valor da frequencia da fundamental. Isto torna mais
facil filtrar os componentes harmonicos da tensao de saıda, reduzindo a dimensao
dos componentes utilizados no filtro e barateando o custo do projeto. Obtem-se os
melhores resultados para valores de mf ımpares e multiplos de tres, uma vez que o
primeiro harmonico de amplitude significativa teoricamente possuira uma frequencia
mf vezes maior que a frequencia da fundamental.
2.1.2 Circuito de sincronismo de fase (PLL)
Para que cada lado CA do conversor sintetize uma tensao sincronizada com o trecho
da rede em que esta conectado, se faz necessaria alguma forma de deteccao de
frequencia e de fase do sistema. Para gerar o sinal que fornece a referencia de fase
12

para o sistema de controle, utiliza-se um PLL, Phase Locked Loop. O PLL utilizado
neste trabalho foi o modelo da biblioteca do PSCAD/EMTDC.
O bloco PLL da biblioteca recebe como entradas os sinais de tensao das tres
fases as quais se deseja sincronizar o sistema. A saıda do bloco e um sinal dente
de serra de amplitude 2π rad ou 360o que retorna ao zero nos momentos em que a
senoide da fase A passa pelo zero com derivada positiva. Este sinal referente a fase
garante que a referencia do PWM possua a fase adequada em relacao a rede. Caso
seja util para o controle, e possıvel tambem utilizar o valor da frequencia calculado
pelo bloco do PLL.
2.1.3 Mudanca de coordenadas abc-dq0
Para chegar ao sistema de controle do conversor B2B e necessario introduzir primeiro
a transformada de Park e a representacao de sinais periodicos em coordenadas DQ0.
A mudanca de coordenadas e uma ferramenta valiosa no desenvolvimento da es-
trategia de controle de sistemas eletricos trifasicos. Caso as correntes ou tensoes
das tres fases estejam equilibradas, e possıvel representa-las como valores constan-
tes projetados sobre os eixos d (direto) e q (em quadratura). O componente 0 da
representacao indica a presenca de desequilıbrio de sequencia 0 entre as fases e vale
zero para sistemas equilibrados. Isso permite a utilizacao de controladores de acao
integral e implica uma simplificacao consideravel do sistema de controle por traba-
lhar com duas variaveis ao inves de tres. E importante frisar que essa simplificacao
so vale para os casos em que o componente de sequencia 0 e nulo.
A representacao de grandezas nos eixos direto e em quadratura e baseada na ideia
da projecao dos valores das tres fases sobre dois eixos ortogonais e girantes. Sendo
um deles o eixo direto d e o outro o eixo em quadratura q atrasado 90o em relacao
a d. A equacao 2.5 representa a mudanca de coordenadas abc para coordenadas
dq0. Nela, um vetor contendo os valores instantaneos relativos as fases A, B e C e
multiplicado a esquerda pela matriz Pi, denominada transformada inversa de Park,
resultando em um vetor com os componentes D, Q e 0 .
fDQ0 = Pi fABC (2.5)
fd
fq
f0
= k
cos(θ) cos(θ − 2π3
) cos(θ − 2π3
)
−sen(θ) −sen(θ − 2π3
) −sen(θ − 2π3
)1√2
1√2
1√2
fa
fb
fc
O valor de k e uma constante que depende da relacao que se deseja manter entre
as grandezas em coordenadas abc e em coordenadas dq0. A transformada e realizada
13

na forma invariante na potencia, o que implica k =
√2
3.
A formulacao da potencia trifasica em coordenadas DQ0 para sistemas balance-
ados e dada por:
S3φ = 3VaIa∗ =3
2(Vd − jVq)(Id + jIq)
S3φ =3
2[(VdId + VqIq) + j(VqId − VdIq)]
Os valores de potencia ativa e reativa sao dados respectivamente pelas relacoes
2.6 e 2.7.
P =3
2(VdId + VqIq) (2.6)
Q =3
2(VqId − VdIq) (2.7)
A mudanca de coordenadas DQ0 para ABC e realizada pela transformada direta
de Park. Basta apenas inverter (2.5). Multiplicando pela esquerda o vetor de valores
em coordenadas DQ0 pela matriz Pd, resulta no vetor de valores em coordenadas
ABC.
fabc = Pdfdq0 (2.8)
fa
fb
fc
= k
cos(θ) −sen(θ) 1√
2
cos(θ − 2π3
) −sen(θ − 2π3
) 1√2
cos(θ + 2π3
) −sen(θ + 2π3
) 1√2
fd
fq
f0
O valor de k da transformada direta e o mesmo utilizado na transformada inversa.
2.1.4 Transformada ABC - αβ0 e a teoria de potencias ins-
tantaneas
A transformada de Clarke inversa realiza uma mudanca de coordenadas semelhante
a realizada pela transformada de Park inversa. Tres grandezas perıodicas trifasicas
equilibradas sao representadas por apenas dois componentes em eixos normais. A
transformada de Clarke inversa por sua vez utiliza eixos estacionarios para repre-
sentar as grandezas ao inves de eixos girantes como a de Park. Por consequencia os
valores dos componentes α e β sao senoides correspondentes as projecoes dos tres
fasores a, b e c em seus respectivos eixos. O componente 0 e utilizado para repre-
sentar desequilıbrio de sequencia 0. A transformada de Clarke inversa Ci e descrita
a seguir.
14
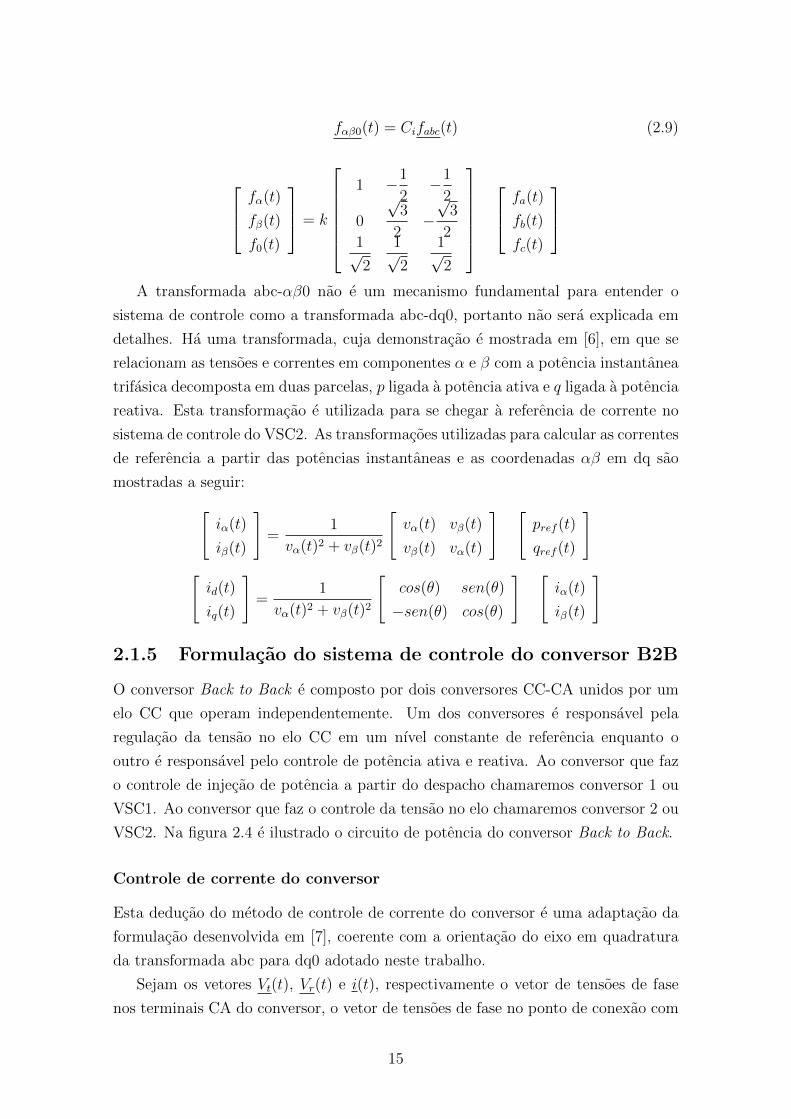
fαβ0(t) = Cifabc(t) (2.9)
fα(t)
fβ(t)
f0(t)
= k
1 −1
2−1
2
0
√3
2−√
3
21√2
1√2
1√2
fa(t)
fb(t)
fc(t)
A transformada abc-αβ0 nao e um mecanismo fundamental para entender o
sistema de controle como a transformada abc-dq0, portanto nao sera explicada em
detalhes. Ha uma transformada, cuja demonstracao e mostrada em [6], em que se
relacionam as tensoes e correntes em componentes α e β com a potencia instantanea
trifasica decomposta em duas parcelas, p ligada a potencia ativa e q ligada a potencia
reativa. Esta transformacao e utilizada para se chegar a referencia de corrente no
sistema de controle do VSC2. As transformacoes utilizadas para calcular as correntes
de referencia a partir das potencias instantaneas e as coordenadas αβ em dq sao
mostradas a seguir:[iα(t)
iβ(t)
]=
1
vα(t)2 + vβ(t)2
[vα(t) vβ(t)
vβ(t) vα(t)
] [pref (t)
qref (t)
][id(t)
iq(t)
]=
1
vα(t)2 + vβ(t)2
[cos(θ) sen(θ)
−sen(θ) cos(θ)
] [iα(t)
iβ(t)
]
2.1.5 Formulacao do sistema de controle do conversor B2B
O conversor Back to Back e composto por dois conversores CC-CA unidos por um
elo CC que operam independentemente. Um dos conversores e responsavel pela
regulacao da tensao no elo CC em um nıvel constante de referencia enquanto o
outro e responsavel pelo controle de potencia ativa e reativa. Ao conversor que faz
o controle de injecao de potencia a partir do despacho chamaremos conversor 1 ou
VSC1. Ao conversor que faz o controle da tensao no elo chamaremos conversor 2 ou
VSC2. Na figura 2.4 e ilustrado o circuito de potencia do conversor Back to Back.
Controle de corrente do conversor
Esta deducao do metodo de controle de corrente do conversor e uma adaptacao da
formulacao desenvolvida em [7], coerente com a orientacao do eixo em quadratura
da transformada abc para dq0 adotado neste trabalho.
Sejam os vetores Vt(t), Vr(t) e i(t), respectivamente o vetor de tensoes de fase
nos terminais CA do conversor, o vetor de tensoes de fase no ponto de conexao com
15

Figura 2.4: Conversor de tensao B2B-VSC para linha CA segmentada
a rede e o vetor de correntes de linha circulantes no sentido do conversor para a
rede.
Vt(t) =
vta(t)
vtb(t)
vtc(t)
Vr(t) =
vra(t)
vrb(t)
vrc(t)
i(t) =
ia(t)
ib(t)
ic(t)
Analisando um dos dois conversores da figura 2.4 observa-se que:
vt(t) = Rit(t) + Ld
dti(t) + vr(t)
Aplicando a transformada de Park inversa Pi(t), tem-se:
Pi(t)vt(t) = RPi(t)it(t) + Ld
dt(Pi(t)i(t)) + Pi(t)vr(t)
Pi(t)vt(t) = RPi(t)it(t) + L(d
dti(t)Pi(t) + i(t)
d
dtPi(t)) + Pi(t)vr(t)
Como a matriz Pi(t) e composta apenas por senos e cossenos, e possıvel escrever
sua derivada como:d
dtPi(t) = jPi(t)
dδ
dt
Sendo δ o angulo de fase do eixo d da transformada dq0.
Retomando o desenvolvimento da equacao, multiplicam-se os vetores em coor-
denadas ABC pela transformada inversa de Park Pi(t):
16

vtd − jvtq = R(id − jiq) + L(diddt− j diq
dt) + L(jid + iq)
dδ
dt+ vrd − jvrq
Separando as partes real e imaginaria da equacao chegamos as relacoes 2.10 e
2.11 nas quais se fundamenta o controle de potencia por modo de corrente.
vtd = Rid + Ldiddt
+ Liqdδ
dt+ vrd (2.10)
vtq = Riq + Ldiqdt− Lid
dδ
dt+ vrq (2.11)
Nota-se que as equacoes diferenciais 2.10 e 2.11 possuem as parcelas Liddδdt
e
Liqdδdt
que acoplam os valores de vtq em relacao a id e de vtd em relacao a iq. Apos a
sincronizacao do PLL com a tensao da rede, dδdt
= ω, portanto Ldδdt
e igual ao valor
da reatancia indutiva conectada a saıda CA do conversor. E possıvel dividir essas
equacoes em tres parcelas utilizando um controle por antecipacao (feedforward).
vtd = v′td + iqXL + vrd
vtq = v′tq − idXL + vrq
v′td = Rid + Ldiddt
(2.12)
v′tq = Riq + Ldiqdt
(2.13)
As equacoes diferenciais 2.12 e 2.13 representam dois sistemas lineares de pri-
meira ordem desacoplados e mostram que os valores de id e iq podem ser controlados
respectivamente por v′td e v′tq por meio de uma malha de controle realimentada. O
controle feedforward ainda serve para melhorar o desempenho dinamico do sistema
de controle. O diagrama de blocos da malha de controle de corrente e mostrado na
figura 2.5
A tensao instantanea vt(t) em coordenadas abc e normalizada pelo valor de
pico tem o mesmo valor em pu que o sinal de referencia senoidal do PWM caso a
portadora tenha amplitude unitaria. O filtro feedforward utilizado na realimentacao
da malha de controle e apenas um filtro passa-baixa com a funcao de reduzir o ruıdo
da medicao de vrd e vrq que poderia prejudicar o correto funcionamento do sistema.
A partir das equacoes 2.12 e 2.13 e possıvel obter uma malha de controle de corrente
equivalente a da figura 2.6.
17
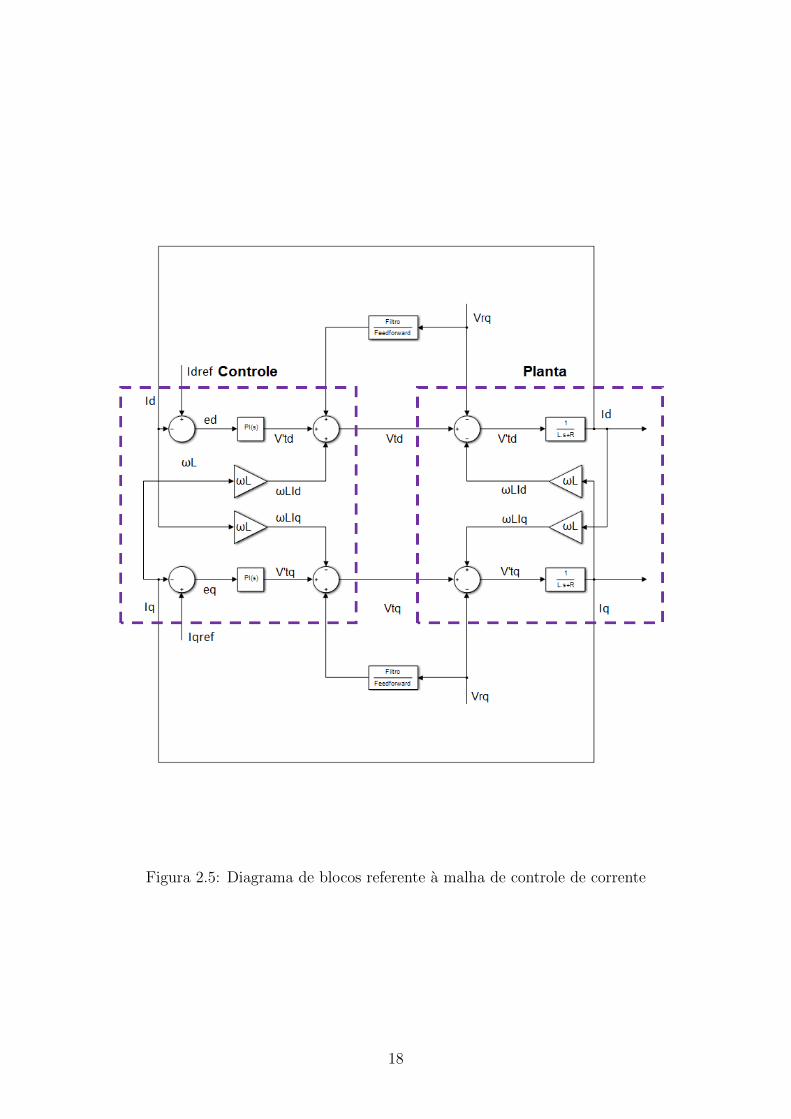
Figura 2.5: Diagrama de blocos referente a malha de controle de corrente
18
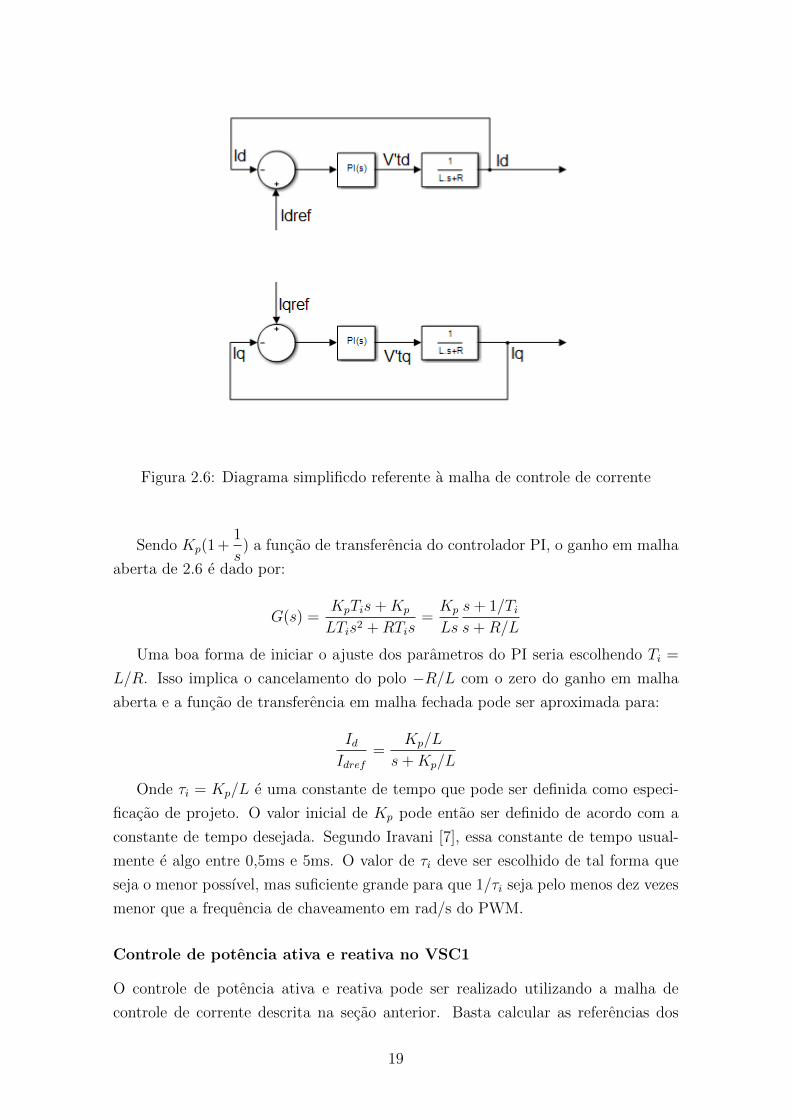
Figura 2.6: Diagrama simplificdo referente a malha de controle de corrente
Sendo Kp(1 +1
s) a funcao de transferencia do controlador PI, o ganho em malha
aberta de 2.6 e dado por:
G(s) =KpTis+Kp
LTis2 +RTis=Kp
Ls
s+ 1/Tis+R/L
Uma boa forma de iniciar o ajuste dos parametros do PI seria escolhendo Ti =
L/R. Isso implica o cancelamento do polo −R/L com o zero do ganho em malha
aberta e a funcao de transferencia em malha fechada pode ser aproximada para:
IdIdref
=Kp/L
s+Kp/L
Onde τi = Kp/L e uma constante de tempo que pode ser definida como especi-
ficacao de projeto. O valor inicial de Kp pode entao ser definido de acordo com a
constante de tempo desejada. Segundo Iravani [7], essa constante de tempo usual-
mente e algo entre 0,5ms e 5ms. O valor de τi deve ser escolhido de tal forma que
seja o menor possıvel, mas suficiente grande para que 1/τi seja pelo menos dez vezes
menor que a frequencia de chaveamento em rad/s do PWM.
Controle de potencia ativa e reativa no VSC1
O controle de potencia ativa e reativa pode ser realizado utilizando a malha de
controle de corrente descrita na secao anterior. Basta calcular as referencias dos
19

componentes de corrente em eixo direto e em quadratura. E possıvel obter estes
valores a partir das equacoes de potencia 2.6 e 2.7 [7]. O PLL utilizado sincroniza
seu retorno ao zero com a passagem pelo zero da tensao da rede, tornando Vd = 0.
As equacoes de potencia podem entao ser simplificadas para:
P (t) =3
2Vq(t)Iq(t)
Q(t) =3
2Vq(t)Id(t)
As referencias de corrente para o VSC1 sao entao:
Idref =2
3
Q
Vq
Iqref =2
3
P
Vq
Controle de tensao no elo CC e de tensao CA no VSC2
O controle de tensao no elo CC esta relacionado diretamente ao transito de energia
entre cada parte do conversor B2B. Se ha fluxo de potencia no sentido da rede para
o capacitor, ele se carrega, elevando o nıvel de tensao no elo. Se nao houver um
equilıbrio no fluxo de potencia dos dois lados do conversor, o nıvel de tensao entre os
terminis de corrente contınua sofrera variacoes. Baseando-se nesse comportamento,
o VSC2 regula a tensao do elo CC alterando o fluxo de potencia. Caso a tensao esteja
abaixo do nıvel desejado, o erro de tensao contınua processado pelo controlador PI
deve gerar uma referencia negativa de potencia ativa, uma vez que o sentido positivo
de corrente adotado e na orientacao do conversor para a rede. Reciprocamente, um
erro negativo de tensao gera uma referencia positiva de potencia.
A estrategia de controle da tensao CA na barra se baseia em um princıpio se-
melhante ao da tensao no elo CC. A grande diferenca esta na variavel de controle
utilizada. Em sistemas de potencia o nıvel de tensao em uma barra esta intimamente
relacionado a potencia reativa no ponto em questao. De forma analoga ao controle
de tensao CC, calcula-se o erro da tensao eficaz CA em relacao a sua referencia.
Pela logica de controle utilizada neste trabalho, uma sobretensao causa um erro
negativo, que quando processado pelo controlador PI gera uma referencia negativa
de q, levando o sistema de controle de corrente a injetar uma corrente em atraso de
fase em relacao a tensao na convencao do VSC como gerador. Reciprocamente, um
afundamento de tensao gera uma referencia positiva de q, injetando uma corrente
em avanco de fase. O controle da tensao CA e uma questao delicada, uma vez que
o controle da tensao CC depende do nıvel CA nos terminais do VSC2 e o controle
da propria tensao CA depende do nıvel de tensao no elo. Deve-se utilizar entao um
20
ConversorCA-CC
a
b
c
p
Vcc +
Vcc -
Vcc
p1
Icc 500.0 [uF]
ConversorCA-CC
a
b
c
p
Vcc +
Vcc -
p2
BRK
VA
11
sis_1 VA
1 1
sis_2
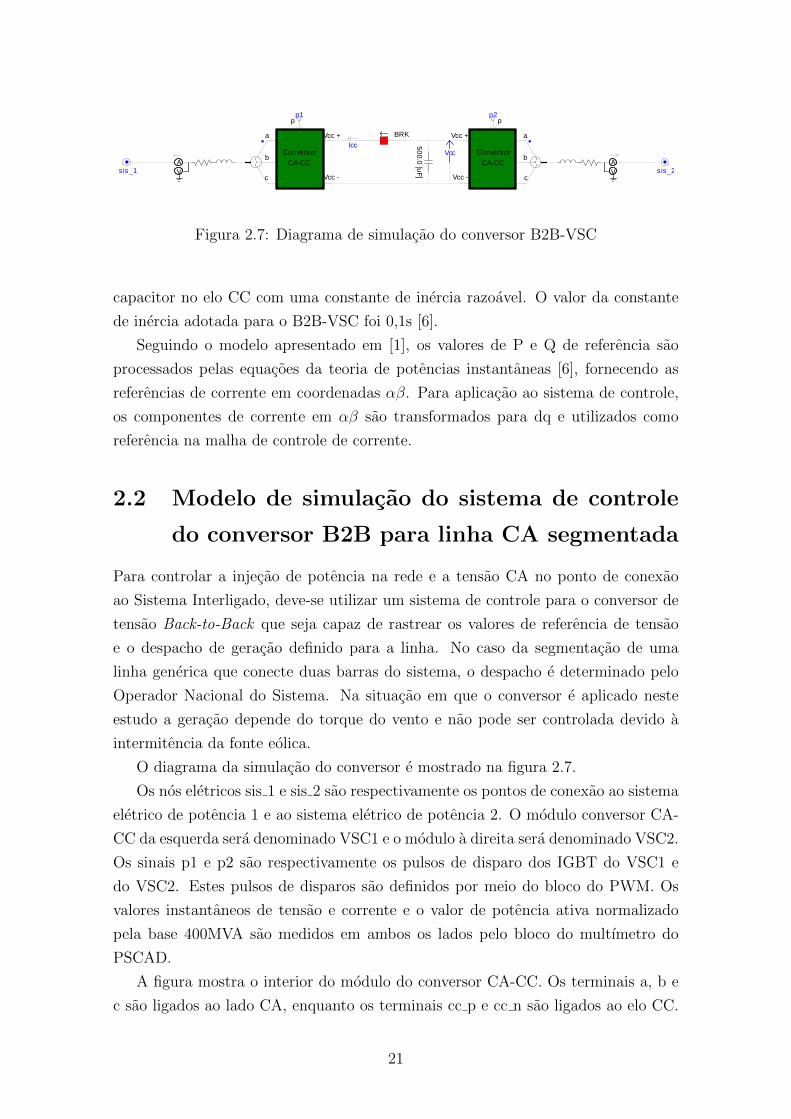
Figura 2.7: Diagrama de simulacao do conversor B2B-VSC
capacitor no elo CC com uma constante de inercia razoavel. O valor da constante
de inercia adotada para o B2B-VSC foi 0,1s [6].
Seguindo o modelo apresentado em [1], os valores de P e Q de referencia sao
processados pelas equacoes da teoria de potencias instantaneas [6], fornecendo as
referencias de corrente em coordenadas αβ. Para aplicacao ao sistema de controle,
os componentes de corrente em αβ sao transformados para dq e utilizados como
referencia na malha de controle de corrente.
2.2 Modelo de simulacao do sistema de controle
do conversor B2B para linha CA segmentada
Para controlar a injecao de potencia na rede e a tensao CA no ponto de conexao
ao Sistema Interligado, deve-se utilizar um sistema de controle para o conversor de
tensao Back-to-Back que seja capaz de rastrear os valores de referencia de tensao
e o despacho de geracao definido para a linha. No caso da segmentacao de uma
linha generica que conecte duas barras do sistema, o despacho e determinado pelo
Operador Nacional do Sistema. Na situacao em que o conversor e aplicado neste
estudo a geracao depende do torque do vento e nao pode ser controlada devido a
intermitencia da fonte eolica.
O diagrama da simulacao do conversor e mostrado na figura 2.7.
Os nos eletricos sis 1 e sis 2 sao respectivamente os pontos de conexao ao sistema
eletrico de potencia 1 e ao sistema eletrico de potencia 2. O modulo conversor CA-
CC da esquerda sera denominado VSC1 e o modulo a direita sera denominado VSC2.
Os sinais p1 e p2 sao respectivamente os pulsos de disparo dos IGBT do VSC1 e
do VSC2. Estes pulsos de disparos sao definidos por meio do bloco do PWM. Os
valores instantaneos de tensao e corrente e o valor de potencia ativa normalizado
pela base 400MVA sao medidos em ambos os lados pelo bloco do multımetro do
PSCAD.
A figura mostra o interior do modulo do conversor CA-CC. Os terminais a, b e
c sao ligados ao lado CA, enquanto os terminais cc p e cc n sao ligados ao elo CC.
21
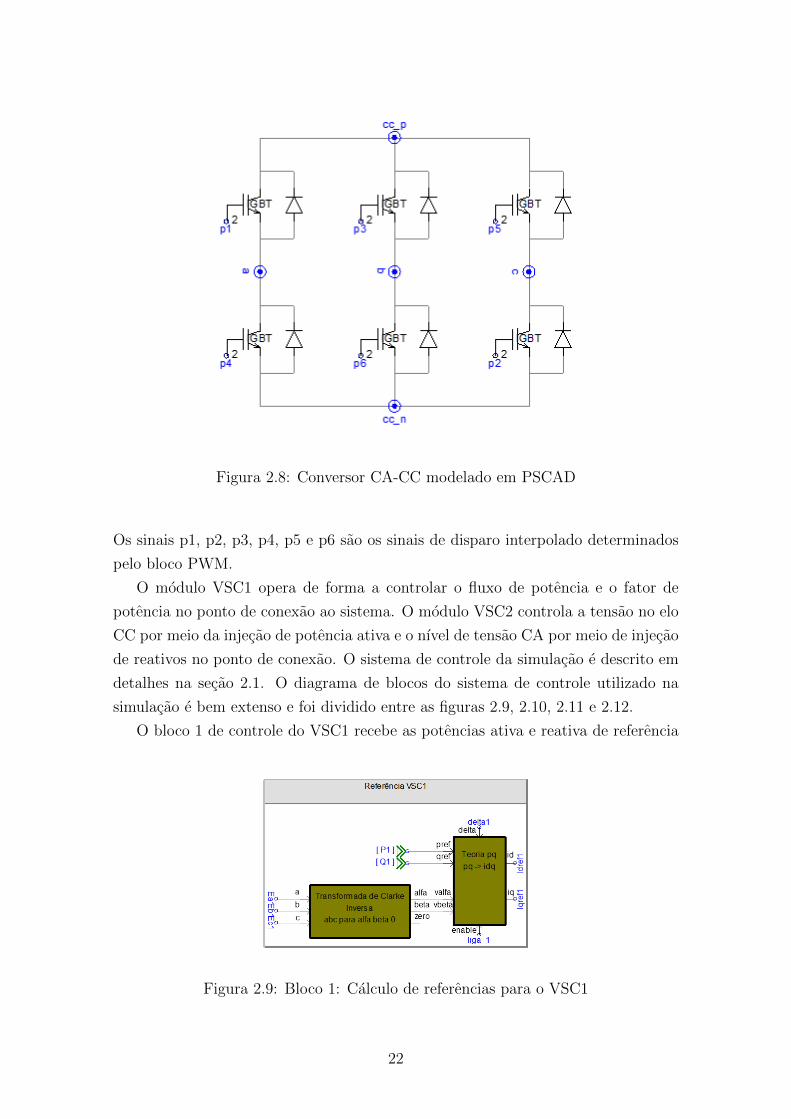
Figura 2.8: Conversor CA-CC modelado em PSCAD
Os sinais p1, p2, p3, p4, p5 e p6 sao os sinais de disparo interpolado determinados
pelo bloco PWM.
O modulo VSC1 opera de forma a controlar o fluxo de potencia e o fator de
potencia no ponto de conexao ao sistema. O modulo VSC2 controla a tensao no elo
CC por meio da injecao de potencia ativa e o nıvel de tensao CA por meio de injecao
de reativos no ponto de conexao. O sistema de controle da simulacao e descrito em
detalhes na secao 2.1. O diagrama de blocos do sistema de controle utilizado na
simulacao e bem extenso e foi dividido entre as figuras 2.9, 2.10, 2.11 e 2.12.
O bloco 1 de controle do VSC1 recebe as potencias ativa e reativa de referencia
Figura 2.9: Bloco 1: Calculo de referencias para o VSC1
22
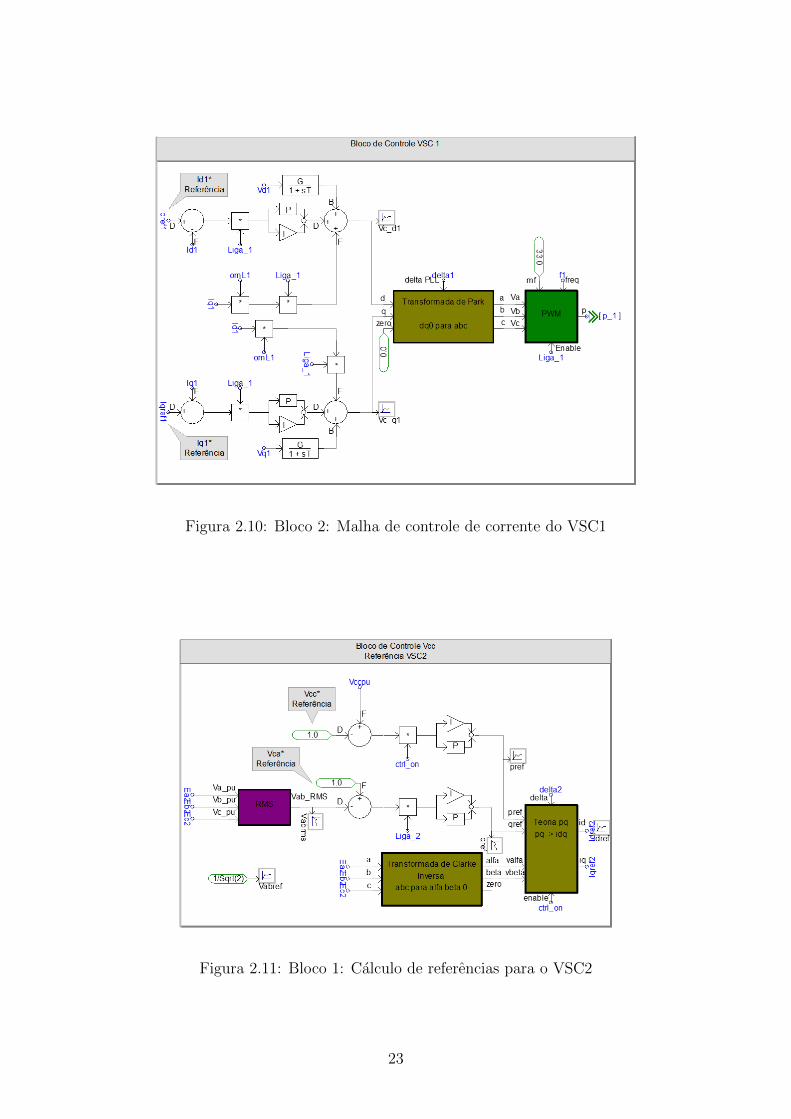
Figura 2.10: Bloco 2: Malha de controle de corrente do VSC1
Figura 2.11: Bloco 1: Calculo de referencias para o VSC2
23
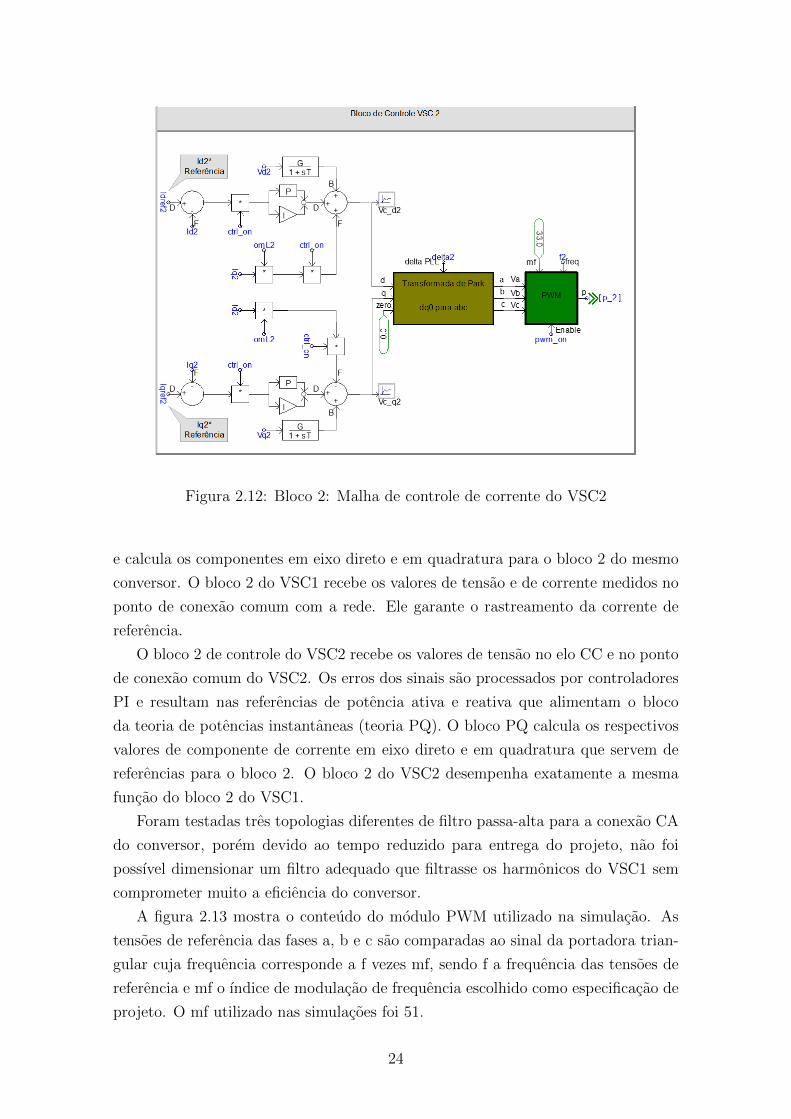
Figura 2.12: Bloco 2: Malha de controle de corrente do VSC2
e calcula os componentes em eixo direto e em quadratura para o bloco 2 do mesmo
conversor. O bloco 2 do VSC1 recebe os valores de tensao e de corrente medidos no
ponto de conexao comum com a rede. Ele garante o rastreamento da corrente de
referencia.
O bloco 2 de controle do VSC2 recebe os valores de tensao no elo CC e no ponto
de conexao comum do VSC2. Os erros dos sinais sao processados por controladores
PI e resultam nas referencias de potencia ativa e reativa que alimentam o bloco
da teoria de potencias instantaneas (teoria PQ). O bloco PQ calcula os respectivos
valores de componente de corrente em eixo direto e em quadratura que servem de
referencias para o bloco 2. O bloco 2 do VSC2 desempenha exatamente a mesma
funcao do bloco 2 do VSC1.
Foram testadas tres topologias diferentes de filtro passa-alta para a conexao CA
do conversor, porem devido ao tempo reduzido para entrega do projeto, nao foi
possıvel dimensionar um filtro adequado que filtrasse os harmonicos do VSC1 sem
comprometer muito a eficiencia do conversor.
A figura 2.13 mostra o conteudo do modulo PWM utilizado na simulacao. As
tensoes de referencia das fases a, b e c sao comparadas ao sinal da portadora trian-
gular cuja frequencia corresponde a f vezes mf, sendo f a frequencia das tensoes de
referencia e mf o ındice de modulacao de frequencia escolhido como especificacao de
projeto. O mf utilizado nas simulacoes foi 51.
24
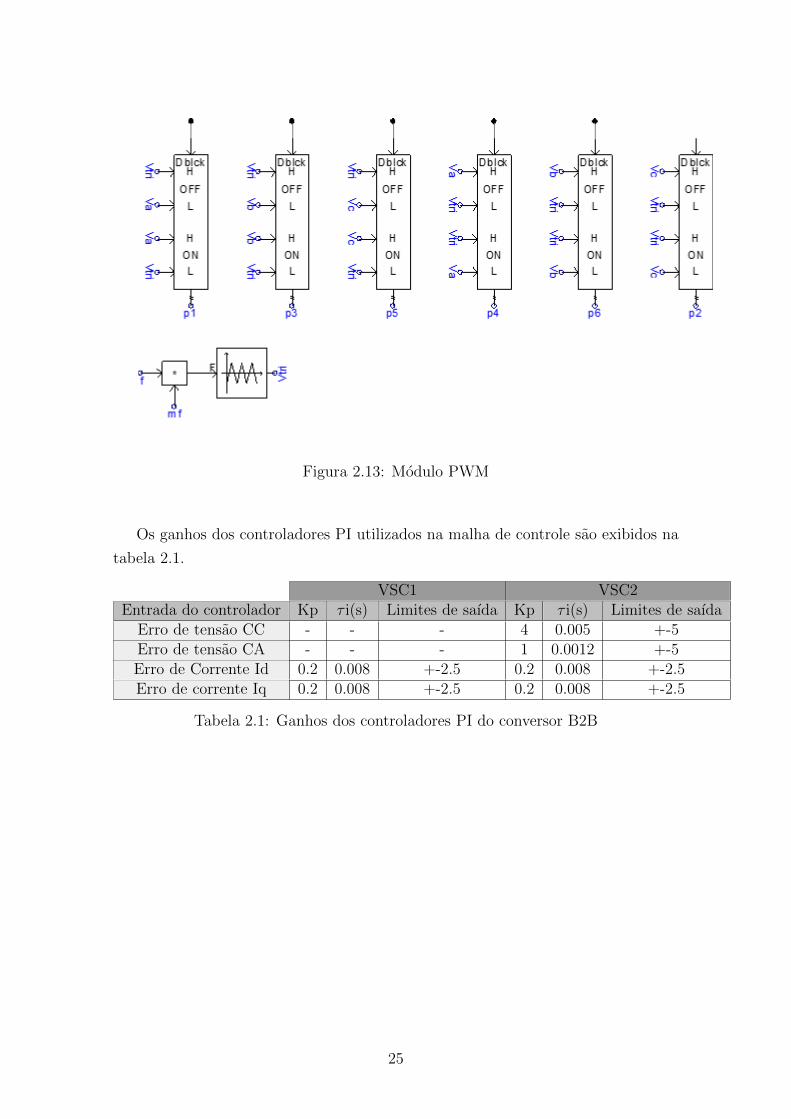
Figura 2.13: Modulo PWM
Os ganhos dos controladores PI utilizados na malha de controle sao exibidos na
tabela 2.1.
VSC1 VSC2Entrada do controlador Kp τ i(s) Limites de saıda Kp τ i(s) Limites de saıda
Erro de tensao CC - - - 4 0.005 +-5Erro de tensao CA - - - 1 0.0012 +-5Erro de Corrente Id 0.2 0.008 +-2.5 0.2 0.008 +-2.5Erro de corrente Iq 0.2 0.008 +-2.5 0.2 0.008 +-2.5
Tabela 2.1: Ganhos dos controladores PI do conversor B2B
25
Capıtulo 3
Modelagem do sistema eletrico
Para inserir a linha CA segmentada em um contexto realista na simulacao, modelou-
se um trecho do Sistema Interligado Nacional contendo a barra de Acu II. Para que
se obtenham resultados de simulacoes proximos a realidade e necessario que o mo-
delo seja o mais detalhado possıvel. No caso de um sistema eletrico interligado
como o brasileiro, idealmente seriam modelados todos os elementos conhecidos co-
nectados a rede com comportamento estatico e dinamico fieis ao comportamento dos
elementos reais. Essa situacao ideal e impossıvel de atingir pois uma representacao
com esse nıvel de detalhes exigiria muito esforco computacional e muito tempo para
desenvolver. E possıvel realizar simulacoes com menos elementos e parametros que
apresentem resultados dentro de uma faixa toleravel de erros em relacao aos modelos
mais completos.
Em se tratando de simulacao de transitorios eletromagneticos e usual modelar
detalhadamente as barras do sistema eletrico vizinhas a barra em que se deseja ob-
servar o fenomeno e os elementos contidos na regiao delimitada por elas. Por barras
vizinhas entendem-se as barras situadas entre o ponto em que sera realizado o es-
tudo e as barras de fronteira da representacao. Segundo o procedimento de redes do
ONS - Diretrizes e criterios para estudos eletricos [8], entre as barras focalizadas no
estudo e as barras de fronteira deve haver pelo menos duas outras barras. Esse pro-
cedimento geralmente apresenta resultados bem proximos aos que seriam alcancados
com uma representacao mais ampla do sistema. Os demais elementos que se encon-
tram fora da regiao escolhida para modelagem sao substituıdos por equivalentes. O
modelo completo de simulacao do sistema eletrico e mostrado na figura 3.1.
O primeiro passo da modelagem do sistema foi a escolha do trecho de interesse.
Foram incluıdas a maioria das linhas que atendem ao criterio de duas barras de
distancia, desprezando-se apenas algumas linhas que conectam trechos de 138kV,
devido a complexidade que o sistema estava adquirindo. Os elementos escolhidos
para a representacao foram incluıdos em um caso no programa SAPRE do CEPEL,
modelados a partir do caso base do ONS para estudos eletromagneticos no horizonte
26
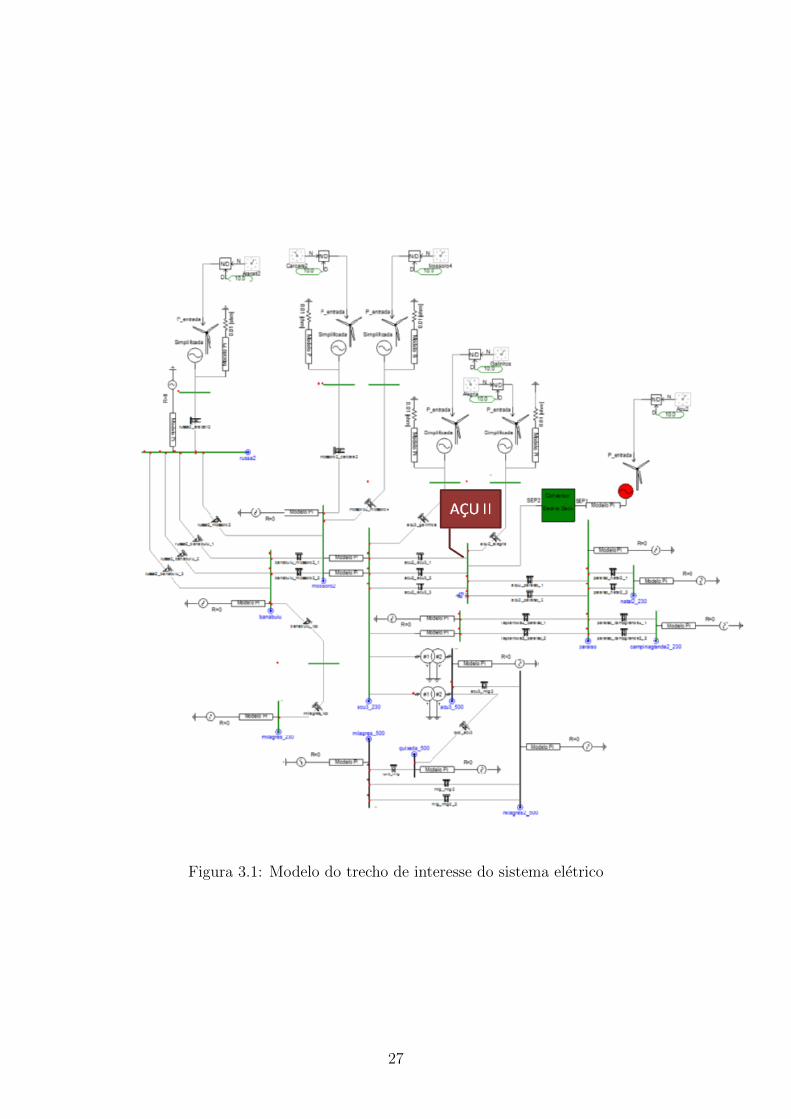
Figura 3.1: Modelo do trecho de interesse do sistema eletrico
27
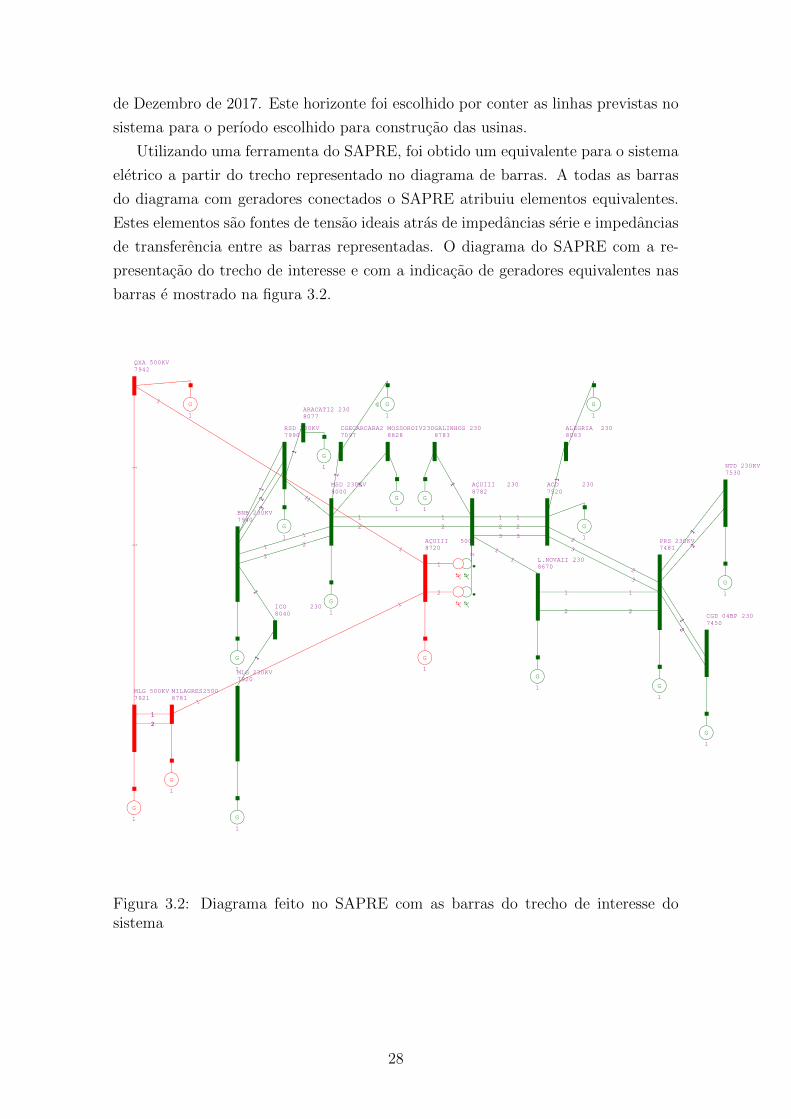
de Dezembro de 2017. Este horizonte foi escolhido por conter as linhas previstas no
sistema para o perıodo escolhido para construcao das usinas.
Utilizando uma ferramenta do SAPRE, foi obtido um equivalente para o sistema
eletrico a partir do trecho representado no diagrama de barras. A todas as barras
do diagrama com geradores conectados o SAPRE atribuiu elementos equivalentes.
Estes elementos sao fontes de tensao ideais atras de impedancias serie e impedancias
de transferencia entre as barras representadas. O diagrama do SAPRE com a re-
presentacao do trecho de interesse e com a indicacao de geradores equivalentes nas
barras e mostrado na figura 3.2.
11
22
11
22
33
1
2
11
22
11
22
MOSSOROIV230
8828
MSD 230KV
8000
BNB 230KV
7940
MLG 230KV
7920
ICO 230
8040
RSD 230KV
7990
AÇUIII 230
8782
CGECARCARA2
7097
ARACATI2 230
8077
GALINHOS 230
8783
ACD 230
7520
PRS 230KV
7481
ALEGRIA 230
8083
CGD 04BP 230
7450
NTD 230KV
7530
AÇUIII 500
8720
QXA 500KV
7942
MILAGRES2500
8781
MLG 500KV
7921
L.NOVAII 230
8670
G
1
G
1
G
1
G
1
G
1
G
1
G
1
G
1
G
1
G
1
G
1
G
1
G
1
G
1
G
1
G
1
G
1
G
1
Figura 3.2: Diagrama feito no SAPRE com as barras do trecho de interesse dosistema
28
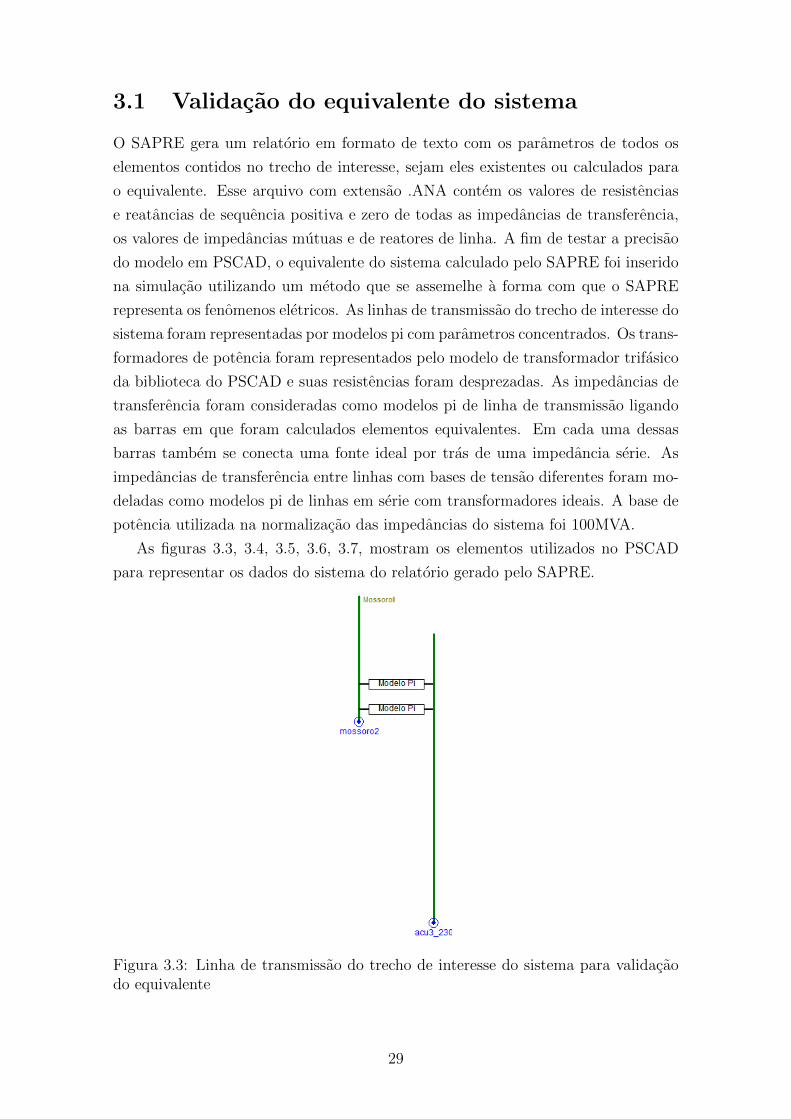
3.1 Validacao do equivalente do sistema
O SAPRE gera um relatorio em formato de texto com os parametros de todos os
elementos contidos no trecho de interesse, sejam eles existentes ou calculados para
o equivalente. Esse arquivo com extensao .ANA contem os valores de resistencias
e reatancias de sequencia positiva e zero de todas as impedancias de transferencia,
os valores de impedancias mutuas e de reatores de linha. A fim de testar a precisao
do modelo em PSCAD, o equivalente do sistema calculado pelo SAPRE foi inserido
na simulacao utilizando um metodo que se assemelhe a forma com que o SAPRE
representa os fenomenos eletricos. As linhas de transmissao do trecho de interesse do
sistema foram representadas por modelos pi com parametros concentrados. Os trans-
formadores de potencia foram representados pelo modelo de transformador trifasico
da biblioteca do PSCAD e suas resistencias foram desprezadas. As impedancias de
transferencia foram consideradas como modelos pi de linha de transmissao ligando
as barras em que foram calculados elementos equivalentes. Em cada uma dessas
barras tambem se conecta uma fonte ideal por tras de uma impedancia serie. As
impedancias de transferencia entre linhas com bases de tensao diferentes foram mo-
deladas como modelos pi de linhas em serie com transformadores ideais. A base de
potencia utilizada na normalizacao das impedancias do sistema foi 100MVA.
As figuras 3.3, 3.4, 3.5, 3.6, 3.7, mostram os elementos utilizados no PSCAD
para representar os dados do sistema do relatorio gerado pelo SAPRE.
Figura 3.3: Linha de transmissao do trecho de interesse do sistema para validacaodo equivalente
29
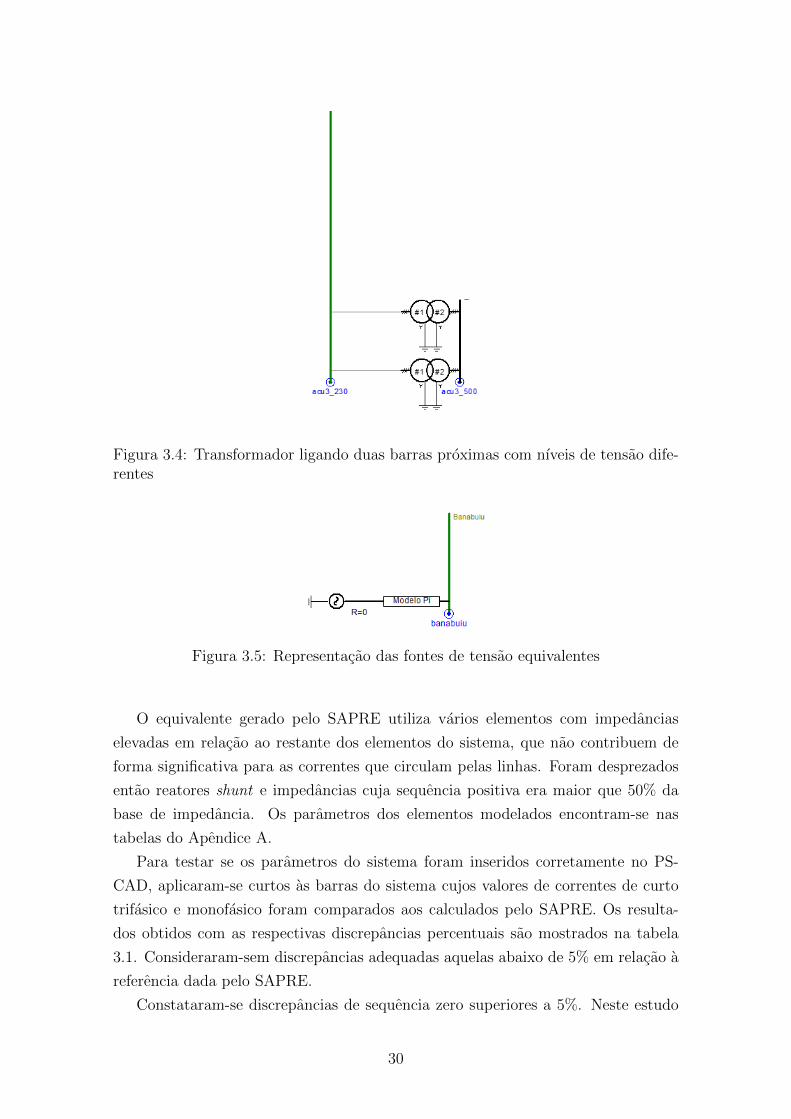
Figura 3.4: Transformador ligando duas barras proximas com nıveis de tensao dife-rentes
Figura 3.5: Representacao das fontes de tensao equivalentes
O equivalente gerado pelo SAPRE utiliza varios elementos com impedancias
elevadas em relacao ao restante dos elementos do sistema, que nao contribuem de
forma significativa para as correntes que circulam pelas linhas. Foram desprezados
entao reatores shunt e impedancias cuja sequencia positiva era maior que 50% da
base de impedancia. Os parametros dos elementos modelados encontram-se nas
tabelas do Apendice A.
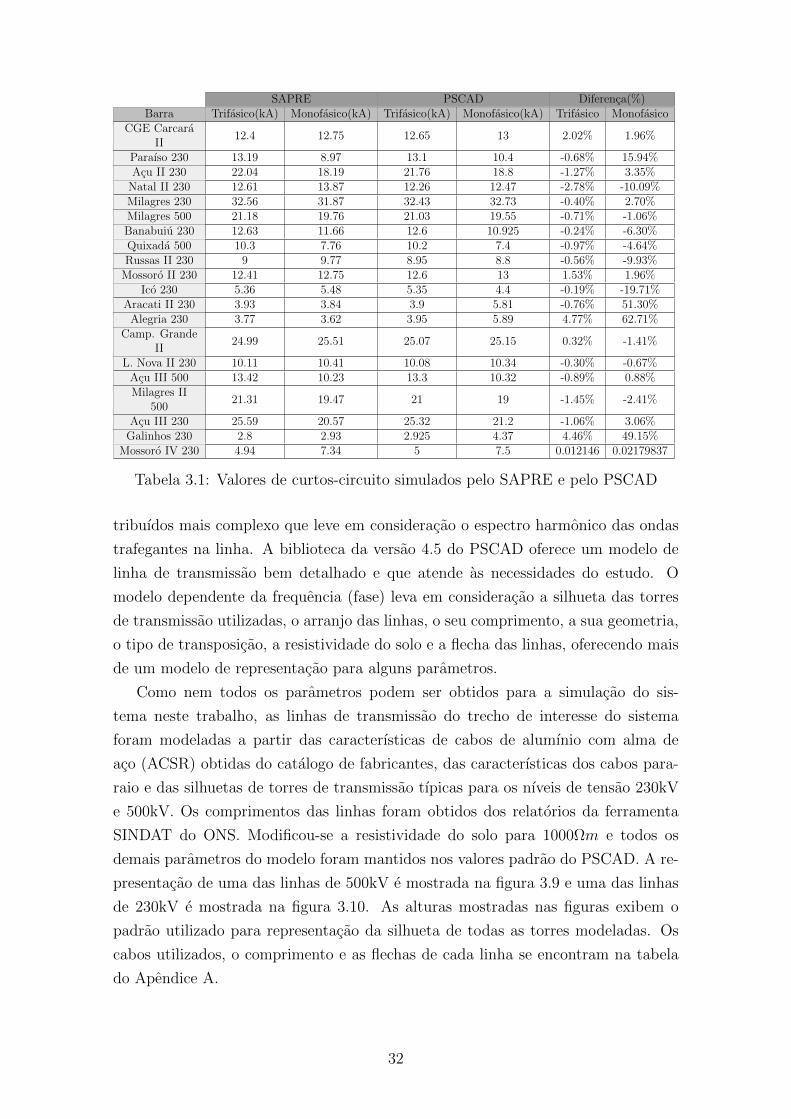
Para testar se os parametros do sistema foram inseridos corretamente no PS-
CAD, aplicaram-se curtos as barras do sistema cujos valores de correntes de curto
trifasico e monofasico foram comparados aos calculados pelo SAPRE. Os resulta-
dos obtidos com as respectivas discrepancias percentuais sao mostrados na tabela
3.1. Consideraram-sem discrepancias adequadas aquelas abaixo de 5% em relacao a
referencia dada pelo SAPRE.
Constataram-se discrepancias de sequencia zero superiores a 5%. Neste estudo
30
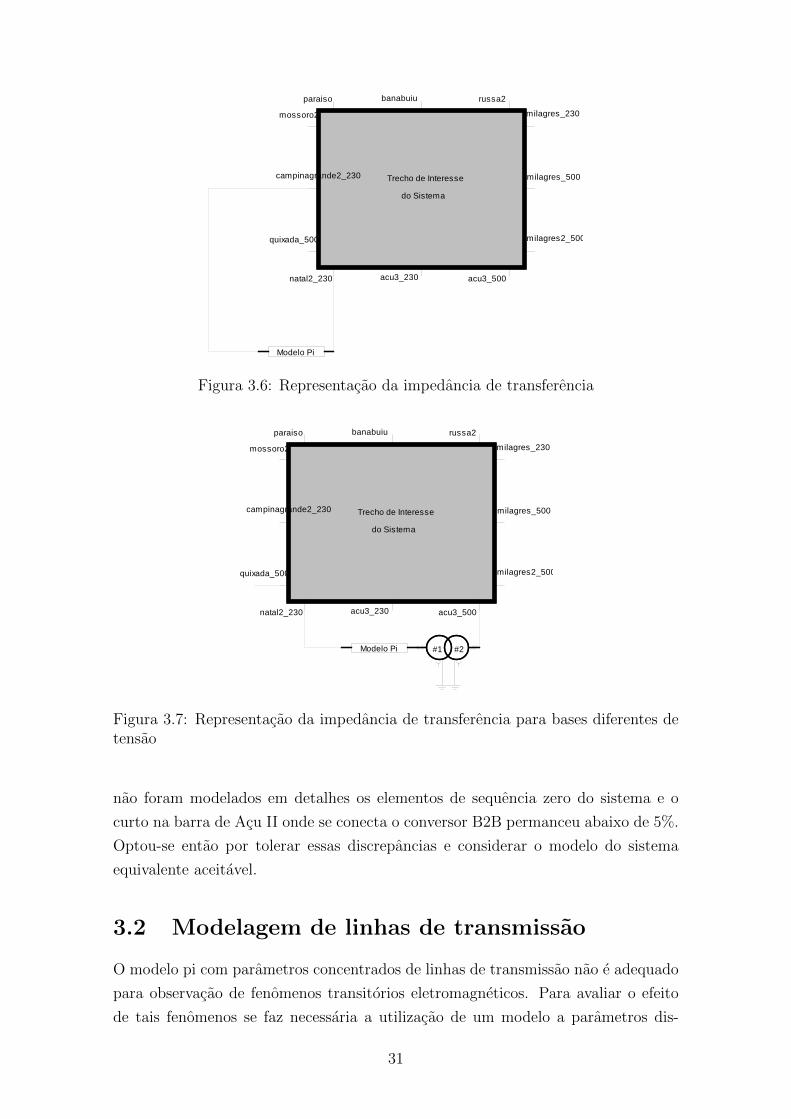
Trecho de Interesse
do Sistema
quixada_500
milagres_500
milagres2_500
milagres_230
natal2_230
campinagrande2_230
russa2
mossoro2
banabuiuparaiso
acu3_230 acu3_500
Modelo Pi
Figura 3.6: Representacao da impedancia de transferencia
Modelo Pi #1 #2
Trecho de Interesse
do Sistema
quixada_500
milagres_500
milagres2_500
milagres_230
natal2_230
campinagrande2_230
russa2
mossoro2
banabuiuparaiso
acu3_230 acu3_500
Figura 3.7: Representacao da impedancia de transferencia para bases diferentes detensao
nao foram modelados em detalhes os elementos de sequencia zero do sistema e o
curto na barra de Acu II onde se conecta o conversor B2B permanceu abaixo de 5%.
Optou-se entao por tolerar essas discrepancias e considerar o modelo do sistema
equivalente aceitavel.
3.2 Modelagem de linhas de transmissao
O modelo pi com parametros concentrados de linhas de transmissao nao e adequado
para observacao de fenomenos transitorios eletromagneticos. Para avaliar o efeito
de tais fenomenos se faz necessaria a utilizacao de um modelo a parametros dis-
31
SAPRE PSCAD Diferenca(%)Barra Trifasico(kA) Monofasico(kA) Trifasico(kA) Monofasico(kA) Trifasico Monofasico
CGE CarcaraII
12.4 12.75 12.65 13 2.02% 1.96%
Paraıso 230 13.19 8.97 13.1 10.4 -0.68% 15.94%Acu II 230 22.04 18.19 21.76 18.8 -1.27% 3.35%
Natal II 230 12.61 13.87 12.26 12.47 -2.78% -10.09%Milagres 230 32.56 31.87 32.43 32.73 -0.40% 2.70%Milagres 500 21.18 19.76 21.03 19.55 -0.71% -1.06%Banabuiu 230 12.63 11.66 12.6 10.925 -0.24% -6.30%Quixada 500 10.3 7.76 10.2 7.4 -0.97% -4.64%Russas II 230 9 9.77 8.95 8.8 -0.56% -9.93%
Mossoro II 230 12.41 12.75 12.6 13 1.53% 1.96%Ico 230 5.36 5.48 5.35 4.4 -0.19% -19.71%
Aracati II 230 3.93 3.84 3.9 5.81 -0.76% 51.30%Alegria 230 3.77 3.62 3.95 5.89 4.77% 62.71%
Camp. GrandeII
24.99 25.51 25.07 25.15 0.32% -1.41%
L. Nova II 230 10.11 10.41 10.08 10.34 -0.30% -0.67%Acu III 500 13.42 10.23 13.3 10.32 -0.89% 0.88%Milagres II
50021.31 19.47 21 19 -1.45% -2.41%
Acu III 230 25.59 20.57 25.32 21.2 -1.06% 3.06%Galinhos 230 2.8 2.93 2.925 4.37 4.46% 49.15%
Mossoro IV 230 4.94 7.34 5 7.5 0.012146 0.02179837
Tabela 3.1: Valores de curtos-circuito simulados pelo SAPRE e pelo PSCAD
tribuıdos mais complexo que leve em consideracao o espectro harmonico das ondas
trafegantes na linha. A biblioteca da versao 4.5 do PSCAD oferece um modelo de
linha de transmissao bem detalhado e que atende as necessidades do estudo. O
modelo dependente da frequencia (fase) leva em consideracao a silhueta das torres
de transmissao utilizadas, o arranjo das linhas, o seu comprimento, a sua geometria,
o tipo de transposicao, a resistividade do solo e a flecha das linhas, oferecendo mais
de um modelo de representacao para alguns parametros.
Como nem todos os parametros podem ser obtidos para a simulacao do sis-
tema neste trabalho, as linhas de transmissao do trecho de interesse do sistema
foram modeladas a partir das caracterısticas de cabos de alumınio com alma de
aco (ACSR) obtidas do catalogo de fabricantes, das caracterısticas dos cabos para-
raio e das silhuetas de torres de transmissao tıpicas para os nıveis de tensao 230kV
e 500kV. Os comprimentos das linhas foram obtidos dos relatorios da ferramenta
SINDAT do ONS. Modificou-se a resistividade do solo para 1000Ωm e todos os
demais parametros do modelo foram mantidos nos valores padrao do PSCAD. A re-
presentacao de uma das linhas de 500kV e mostrada na figura 3.9 e uma das linhas
de 230kV e mostrada na figura 3.10. As alturas mostradas nas figuras exibem o
padrao utilizado para representacao da silhueta de todas as torres modeladas. Os
cabos utilizados, o comprimento e as flechas de cada linha se encontram na tabela
do Apendice A.
32
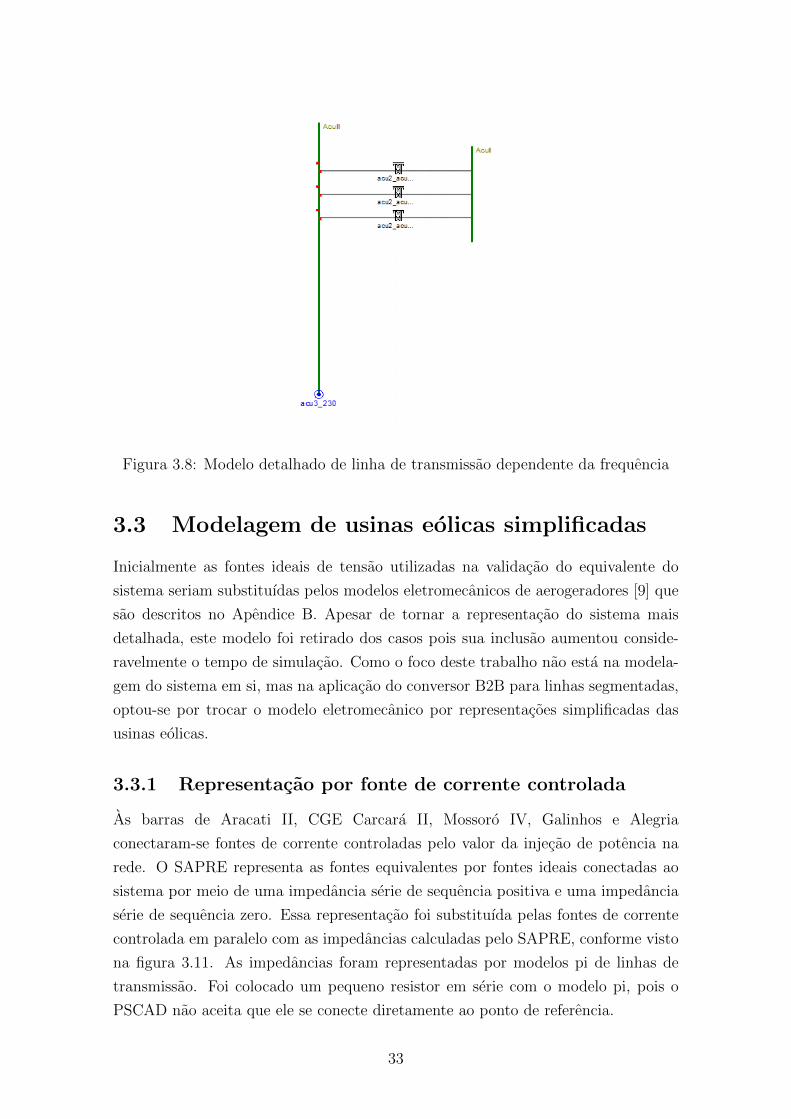
Figura 3.8: Modelo detalhado de linha de transmissao dependente da frequencia
3.3 Modelagem de usinas eolicas simplificadas
Inicialmente as fontes ideais de tensao utilizadas na validacao do equivalente do
sistema seriam substituıdas pelos modelos eletromecanicos de aerogeradores [9] que
sao descritos no Apendice B. Apesar de tornar a representacao do sistema mais
detalhada, este modelo foi retirado dos casos pois sua inclusao aumentou conside-
ravelmente o tempo de simulacao. Como o foco deste trabalho nao esta na modela-
gem do sistema em si, mas na aplicacao do conversor B2B para linhas segmentadas,
optou-se por trocar o modelo eletromecanico por representacoes simplificadas das
usinas eolicas.
3.3.1 Representacao por fonte de corrente controlada
As barras de Aracati II, CGE Carcara II, Mossoro IV, Galinhos e Alegria
conectaram-se fontes de corrente controladas pelo valor da injecao de potencia na
rede. O SAPRE representa as fontes equivalentes por fontes ideais conectadas ao
sistema por meio de uma impedancia serie de sequencia positiva e uma impedancia
serie de sequencia zero. Essa representacao foi substituıda pelas fontes de corrente
controlada em paralelo com as impedancias calculadas pelo SAPRE, conforme visto
na figura 3.11. As impedancias foram representadas por modelos pi de linhas de
transmissao. Foi colocado um pequeno resistor em serie com o modelo pi, pois o
PSCAD nao aceita que ele se conecte diretamente ao ponto de referencia.
33
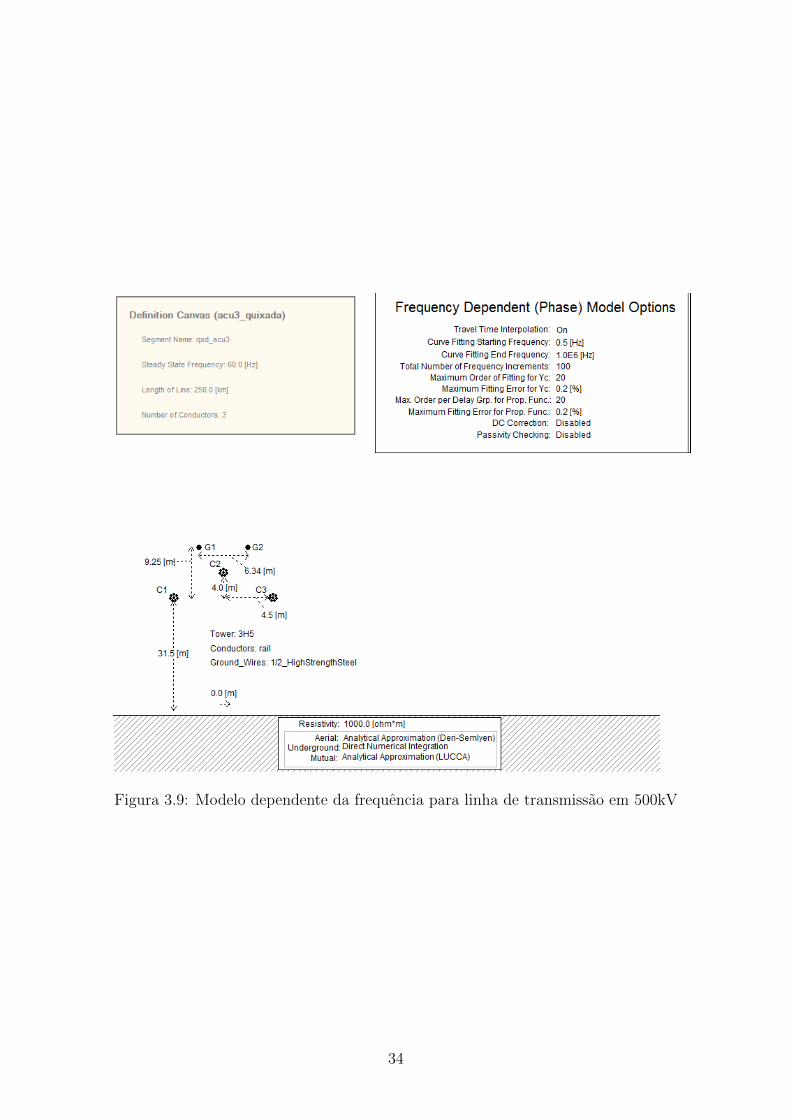
Figura 3.9: Modelo dependente da frequencia para linha de transmissao em 500kV
34
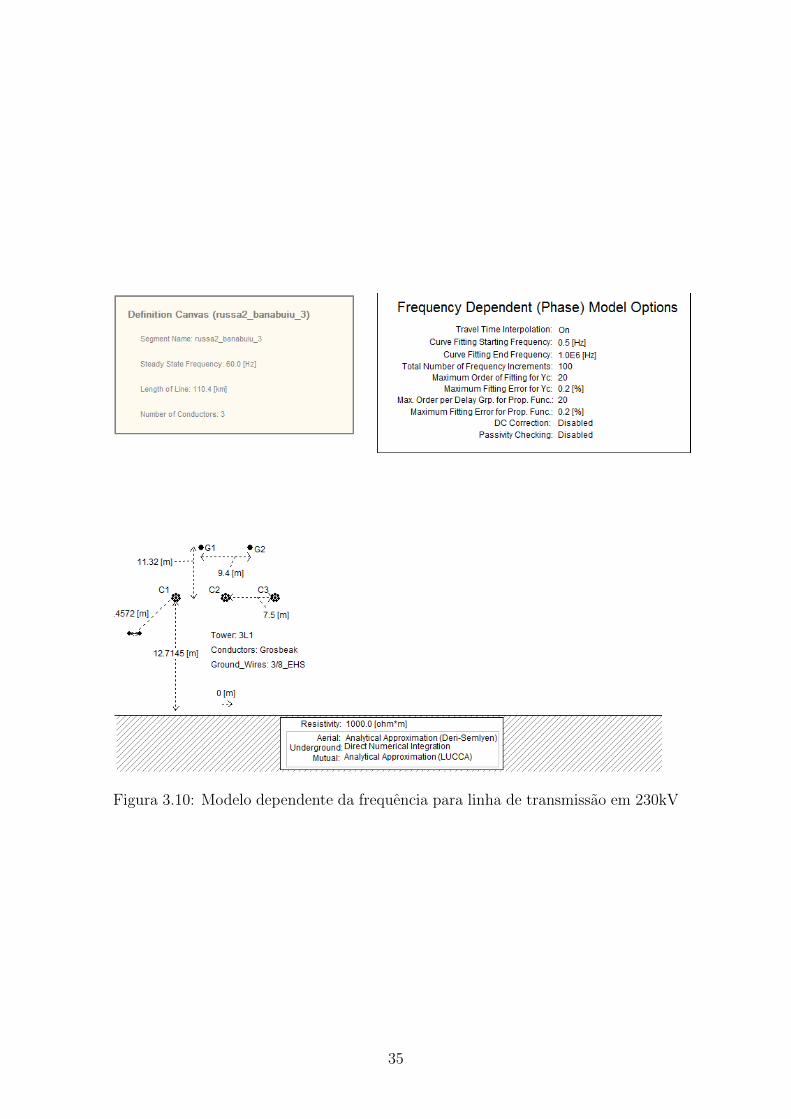
Figura 3.10: Modelo dependente da frequencia para linha de transmissao em 230kV
35
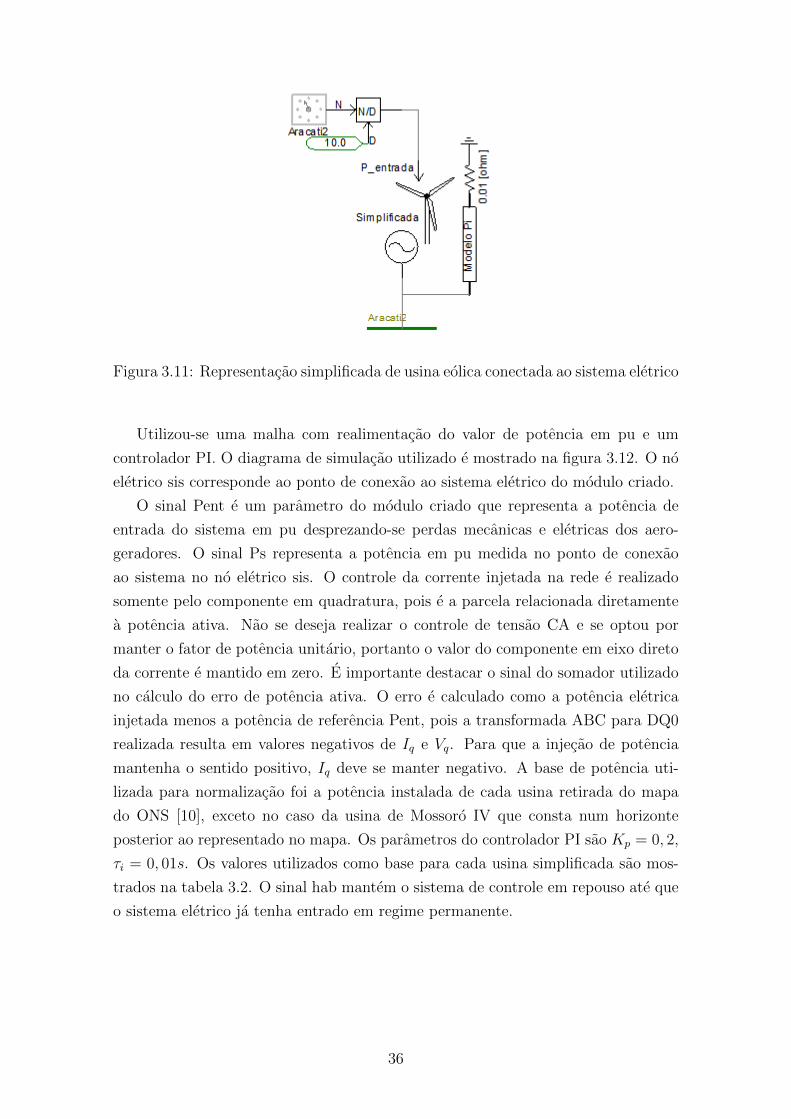
Figura 3.11: Representacao simplificada de usina eolica conectada ao sistema eletrico
Utilizou-se uma malha com realimentacao do valor de potencia em pu e um
controlador PI. O diagrama de simulacao utilizado e mostrado na figura 3.12. O no
eletrico sis corresponde ao ponto de conexao ao sistema eletrico do modulo criado.
O sinal Pent e um parametro do modulo criado que representa a potencia de
entrada do sistema em pu desprezando-se perdas mecanicas e eletricas dos aero-
geradores. O sinal Ps representa a potencia em pu medida no ponto de conexao
ao sistema no no eletrico sis. O controle da corrente injetada na rede e realizado
somente pelo componente em quadratura, pois e a parcela relacionada diretamente
a potencia ativa. Nao se deseja realizar o controle de tensao CA e se optou por
manter o fator de potencia unitario, portanto o valor do componente em eixo direto
da corrente e mantido em zero. E importante destacar o sinal do somador utilizado
no calculo do erro de potencia ativa. O erro e calculado como a potencia eletrica
injetada menos a potencia de referencia Pent, pois a transformada ABC para DQ0
realizada resulta em valores negativos de Iq e Vq. Para que a injecao de potencia
mantenha o sentido positivo, Iq deve se manter negativo. A base de potencia uti-
lizada para normalizacao foi a potencia instalada de cada usina retirada do mapa
do ONS [10], exceto no caso da usina de Mossoro IV que consta num horizonte
posterior ao representado no mapa. Os parametros do controlador PI sao Kp = 0, 2,
τi = 0, 01s. Os valores utilizados como base para cada usina simplificada sao mos-
trados na tabela 3.2. O sinal hab mantem o sistema de controle em repouso ate que
o sistema eletrico ja tenha entrado em regime permanente.
36
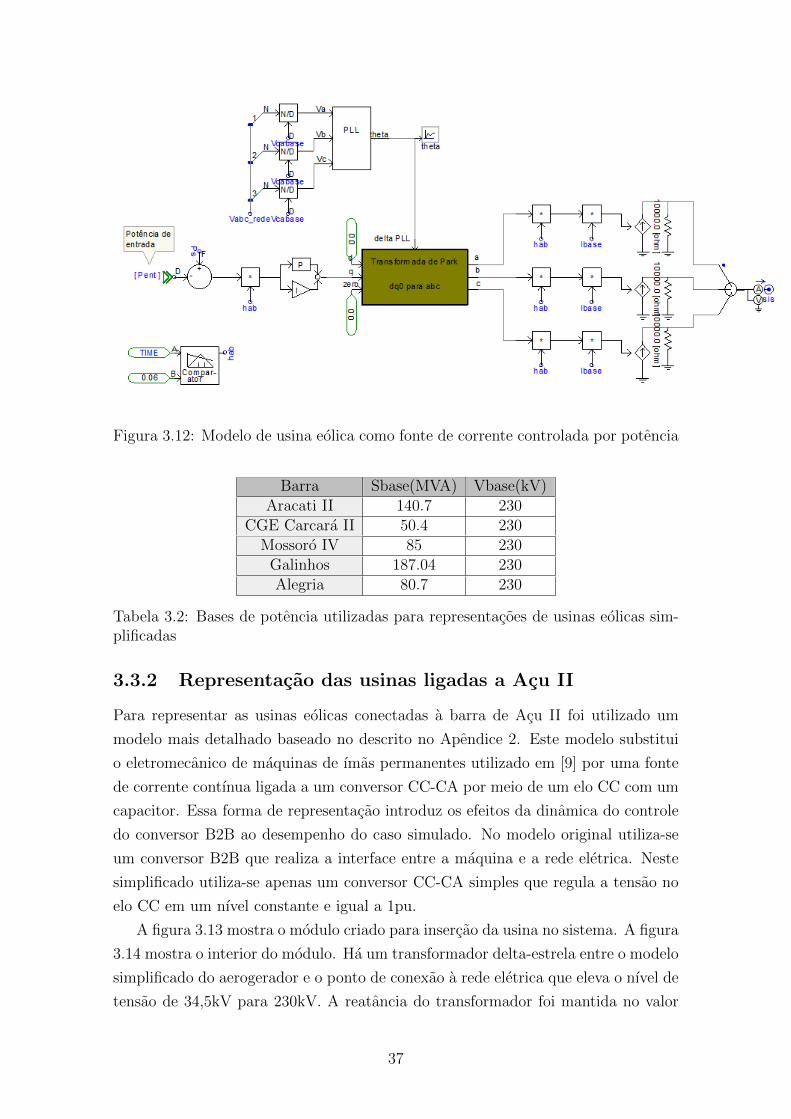
Figura 3.12: Modelo de usina eolica como fonte de corrente controlada por potencia
Barra Sbase(MVA) Vbase(kV)Aracati II 140.7 230
CGE Carcara II 50.4 230Mossoro IV 85 230
Galinhos 187.04 230Alegria 80.7 230
Tabela 3.2: Bases de potencia utilizadas para representacoes de usinas eolicas sim-plificadas
3.3.2 Representacao das usinas ligadas a Acu II
Para representar as usinas eolicas conectadas a barra de Acu II foi utilizado um
modelo mais detalhado baseado no descrito no Apendice 2. Este modelo substitui
o eletromecanico de maquinas de ımas permanentes utilizado em [9] por uma fonte
de corrente contınua ligada a um conversor CC-CA por meio de um elo CC com um
capacitor. Essa forma de representacao introduz os efeitos da dinamica do controle
do conversor B2B ao desempenho do caso simulado. No modelo original utiliza-se
um conversor B2B que realiza a interface entre a maquina e a rede eletrica. Neste
simplificado utiliza-se apenas um conversor CC-CA simples que regula a tensao no
elo CC em um nıvel constante e igual a 1pu.
A figura 3.13 mostra o modulo criado para insercao da usina no sistema. A figura
3.14 mostra o interior do modulo. Ha um transformador delta-estrela entre o modelo
simplificado do aerogerador e o ponto de conexao a rede eletrica que eleva o nıvel de
tensao de 34,5kV para 230kV. A reatancia do transformador foi mantida no valor
37
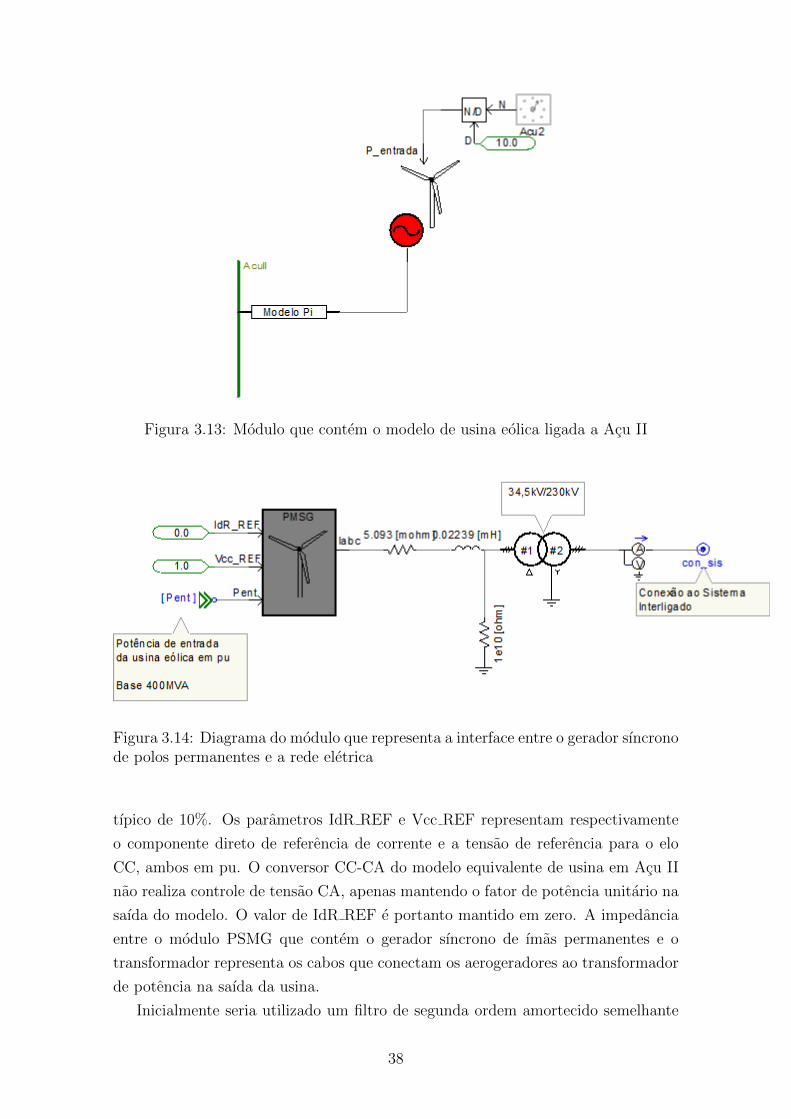
Figura 3.13: Modulo que contem o modelo de usina eolica ligada a Acu II
Figura 3.14: Diagrama do modulo que representa a interface entre o gerador sıncronode polos permanentes e a rede eletrica
tıpico de 10%. Os parametros IdR REF e Vcc REF representam respectivamente
o componente direto de referencia de corrente e a tensao de referencia para o elo
CC, ambos em pu. O conversor CC-CA do modelo equivalente de usina em Acu II
nao realiza controle de tensao CA, apenas mantendo o fator de potencia unitario na
saıda do modelo. O valor de IdR REF e portanto mantido em zero. A impedancia
entre o modulo PSMG que contem o gerador sıncrono de ımas permanentes e o
transformador representa os cabos que conectam os aerogeradores ao transformador
de potencia na saıda da usina.
Inicialmente seria utilizado um filtro de segunda ordem amortecido semelhante
38
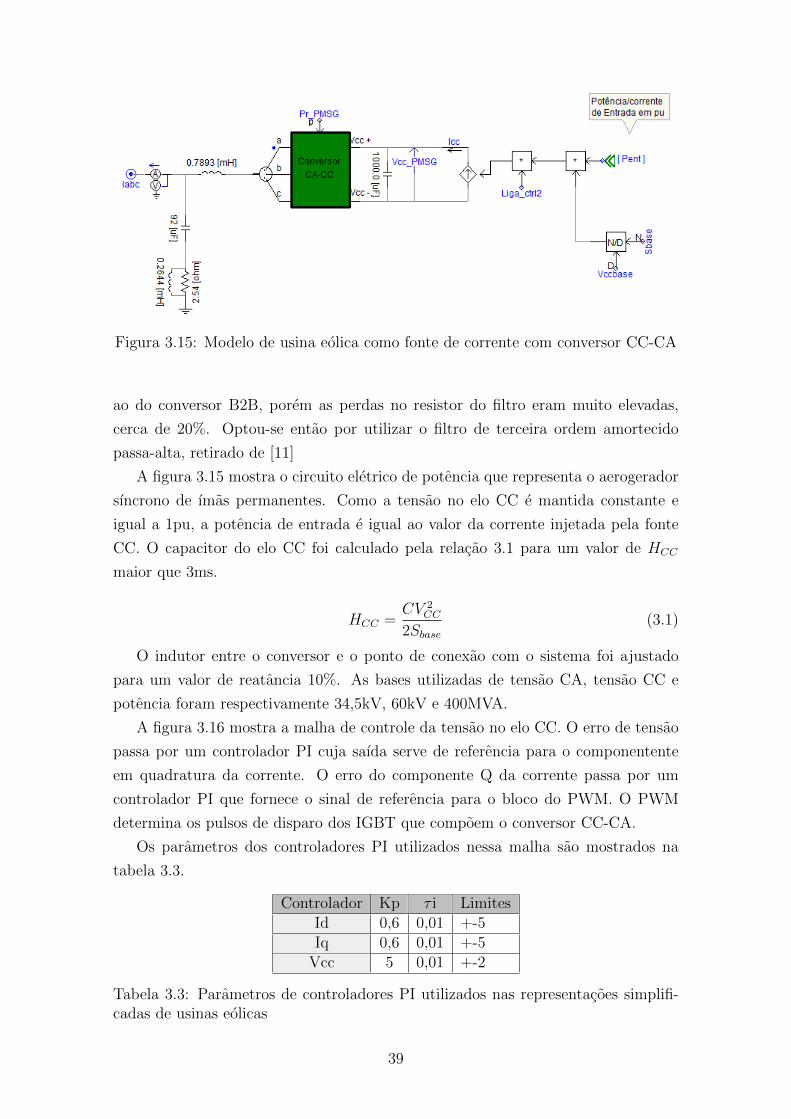
Figura 3.15: Modelo de usina eolica como fonte de corrente com conversor CC-CA
ao do conversor B2B, porem as perdas no resistor do filtro eram muito elevadas,
cerca de 20%. Optou-se entao por utilizar o filtro de terceira ordem amortecido
passa-alta, retirado de [11]
A figura 3.15 mostra o circuito eletrico de potencia que representa o aerogerador
sıncrono de ımas permanentes. Como a tensao no elo CC e mantida constante e
igual a 1pu, a potencia de entrada e igual ao valor da corrente injetada pela fonte
CC. O capacitor do elo CC foi calculado pela relacao 3.1 para um valor de HCC
maior que 3ms.
HCC =CV 2
CC
2Sbase(3.1)
O indutor entre o conversor e o ponto de conexao com o sistema foi ajustado
para um valor de reatancia 10%. As bases utilizadas de tensao CA, tensao CC e
potencia foram respectivamente 34,5kV, 60kV e 400MVA.
A figura 3.16 mostra a malha de controle da tensao no elo CC. O erro de tensao
passa por um controlador PI cuja saıda serve de referencia para o componentente
em quadratura da corrente. O erro do componente Q da corrente passa por um
controlador PI que fornece o sinal de referencia para o bloco do PWM. O PWM
determina os pulsos de disparo dos IGBT que compoem o conversor CC-CA.
Os parametros dos controladores PI utilizados nessa malha sao mostrados na
tabela 3.3.
Controlador Kp τ i LimitesId 0,6 0,01 +-5Iq 0,6 0,01 +-5
Vcc 5 0,01 +-2
Tabela 3.3: Parametros de controladores PI utilizados nas representacoes simplifi-cadas de usinas eolicas
39
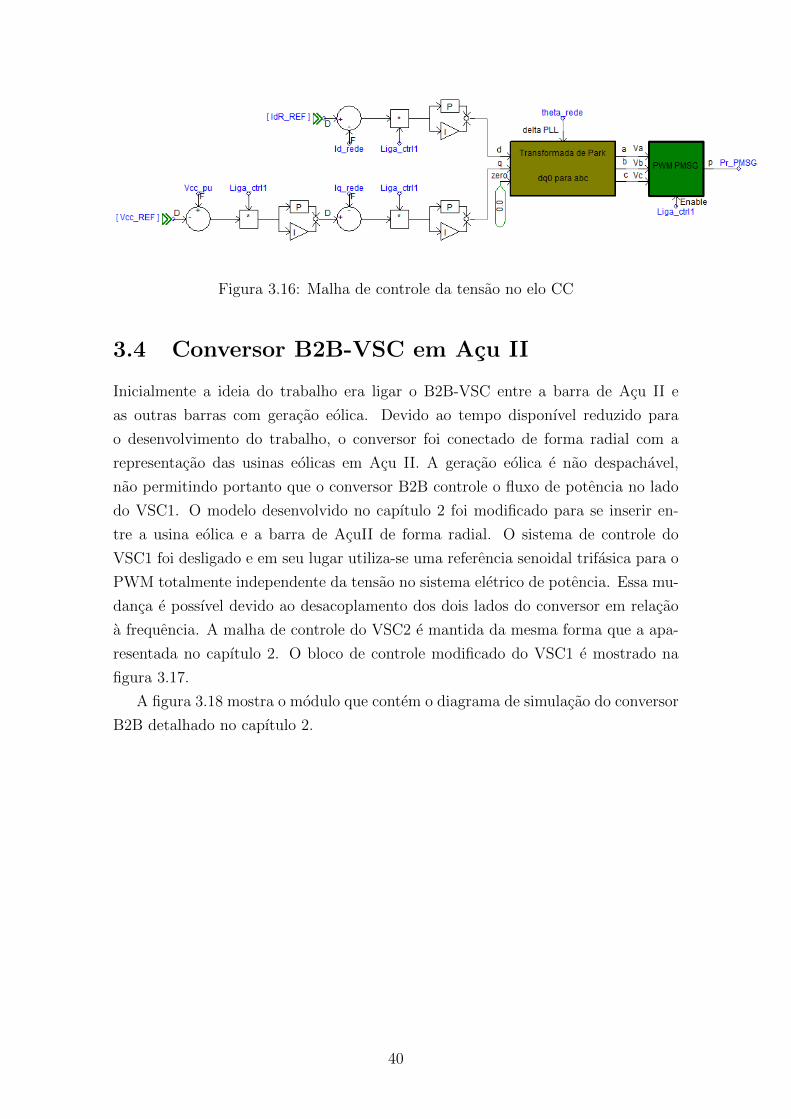
Figura 3.16: Malha de controle da tensao no elo CC
3.4 Conversor B2B-VSC em Acu II
Inicialmente a ideia do trabalho era ligar o B2B-VSC entre a barra de Acu II e
as outras barras com geracao eolica. Devido ao tempo disponıvel reduzido para
o desenvolvimento do trabalho, o conversor foi conectado de forma radial com a
representacao das usinas eolicas em Acu II. A geracao eolica e nao despachavel,
nao permitindo portanto que o conversor B2B controle o fluxo de potencia no lado
do VSC1. O modelo desenvolvido no capıtulo 2 foi modificado para se inserir en-
tre a usina eolica e a barra de AcuII de forma radial. O sistema de controle do
VSC1 foi desligado e em seu lugar utiliza-se uma referencia senoidal trifasica para o
PWM totalmente independente da tensao no sistema eletrico de potencia. Essa mu-
danca e possıvel devido ao desacoplamento dos dois lados do conversor em relacao
a frequencia. A malha de controle do VSC2 e mantida da mesma forma que a apa-
resentada no capıtulo 2. O bloco de controle modificado do VSC1 e mostrado na
figura 3.17.
A figura 3.18 mostra o modulo que contem o diagrama de simulacao do conversor
B2B detalhado no capıtulo 2.
40
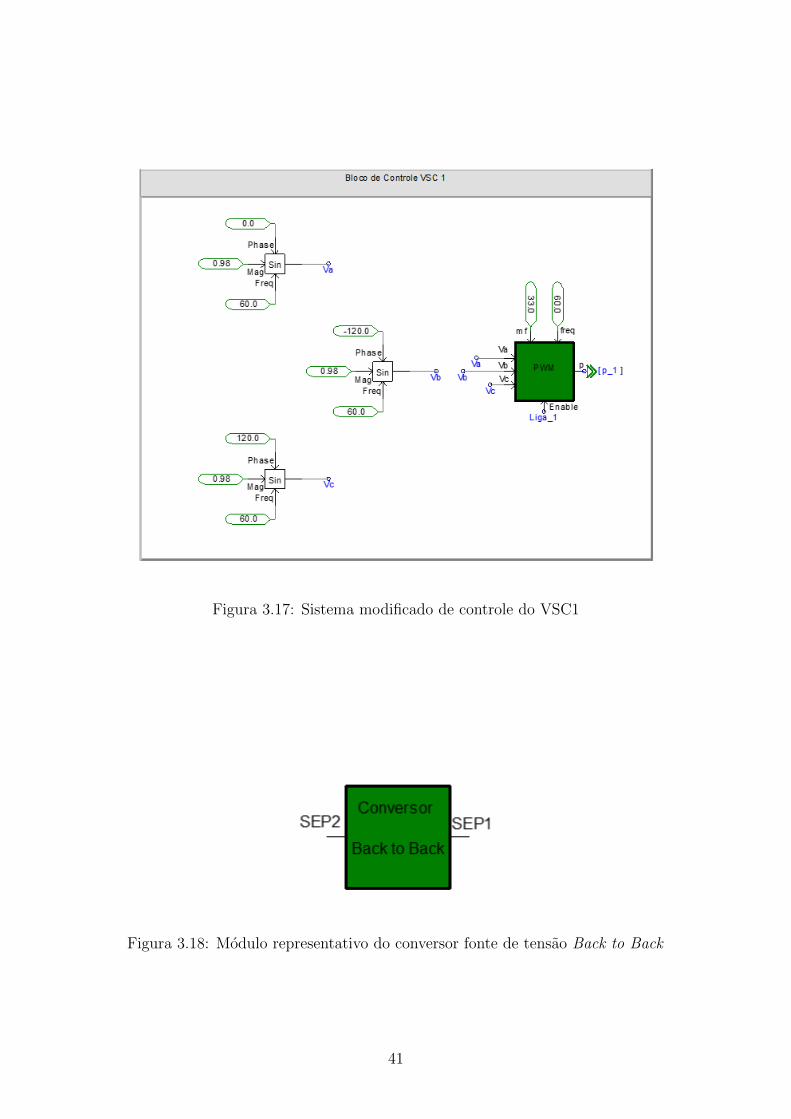
Figura 3.17: Sistema modificado de controle do VSC1
Figura 3.18: Modulo representativo do conversor fonte de tensao Back to Back
41
Capıtulo 4
Resultados e Discussoes
Este capıtulo apresenta e discute brevemente os resultados obtidos das simulacoes.
Foi simulado um estado do sistema eletrico em carregamento leve, pois geralmente
as maiores variacoes de tensao ocorrem nesta condicao de carga. Realizaram-se duas
simulacoes, uma com a presenca do conversor de tensao B2B e outra sem o conversor,
de forma a comparar o comportamento do sistema em ambas as situacoes. Foram
simulados nıveis diferentes de potencia de entrada para as usinas eolicas de Acu II
e para o restante do sistema, tomando a liberdade de fazer variacoes muito mais
rapidas do que as que realmente ocorrem com a dinamica dos ventos.
Os limites adotados para o ındice de distorcao harmonica (THD) avaliado na
barra de Acu II foram baseados nos valores recomendados pelo padrao IEEE-519 [12].
Consideram-se aceitaveis nıveis de distorcao harmonica inferiores a 5% para tensao e
para corrente. O procedimento de rede do ONS submodulo 25.6 [13] estabelece como
ındice de desempenho para flutuacoes de tensao um criterio baseado na percepcao
da cintilacao luminosa por meio de um flickermeter e no tempo de duracao das
cintilacoes. Foi arbitrado como especificacao de projeto para este trabalho um nıvel
aceitavel de flutuacoes de tensao de no maximo 1% de tensao eficaz em relacao a
referencia 1pu.
A tabela 4.1 mostra os tempos em que cada parte do sistema e ligada.
Instante de ligamentoUsinas eolicas simplificadas 0,06s
Controle de tensao no elo CC do B2B-VSC 0,2sPWM do VSC1 0,6s
Controle de tensao CA do VSC2 0,7sSistema de controle do conversor das usinas 1,0s
Aerogeradores de Acu II 1,2s
Tabela 4.1: Instantes de ligamento de cada parte do sistema
42
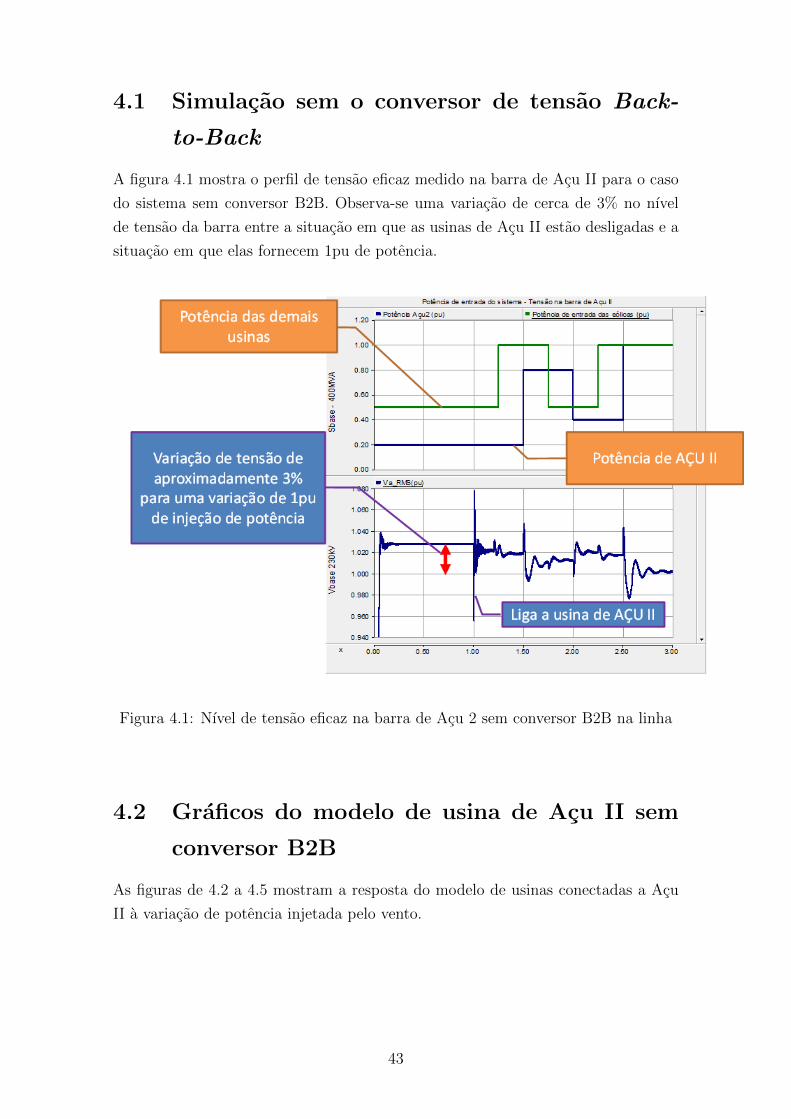
4.1 Simulacao sem o conversor de tensao Back-
to-Back
A figura 4.1 mostra o perfil de tensao eficaz medido na barra de Acu II para o caso
do sistema sem conversor B2B. Observa-se uma variacao de cerca de 3% no nıvel
de tensao da barra entre a situacao em que as usinas de Acu II estao desligadas e a
situacao em que elas fornecem 1pu de potencia.
Figura 4.1: Nıvel de tensao eficaz na barra de Acu 2 sem conversor B2B na linha
4.2 Graficos do modelo de usina de Acu II sem
conversor B2B
As figuras de 4.2 a 4.5 mostram a resposta do modelo de usinas conectadas a Acu
II a variacao de potencia injetada pelo vento.
43
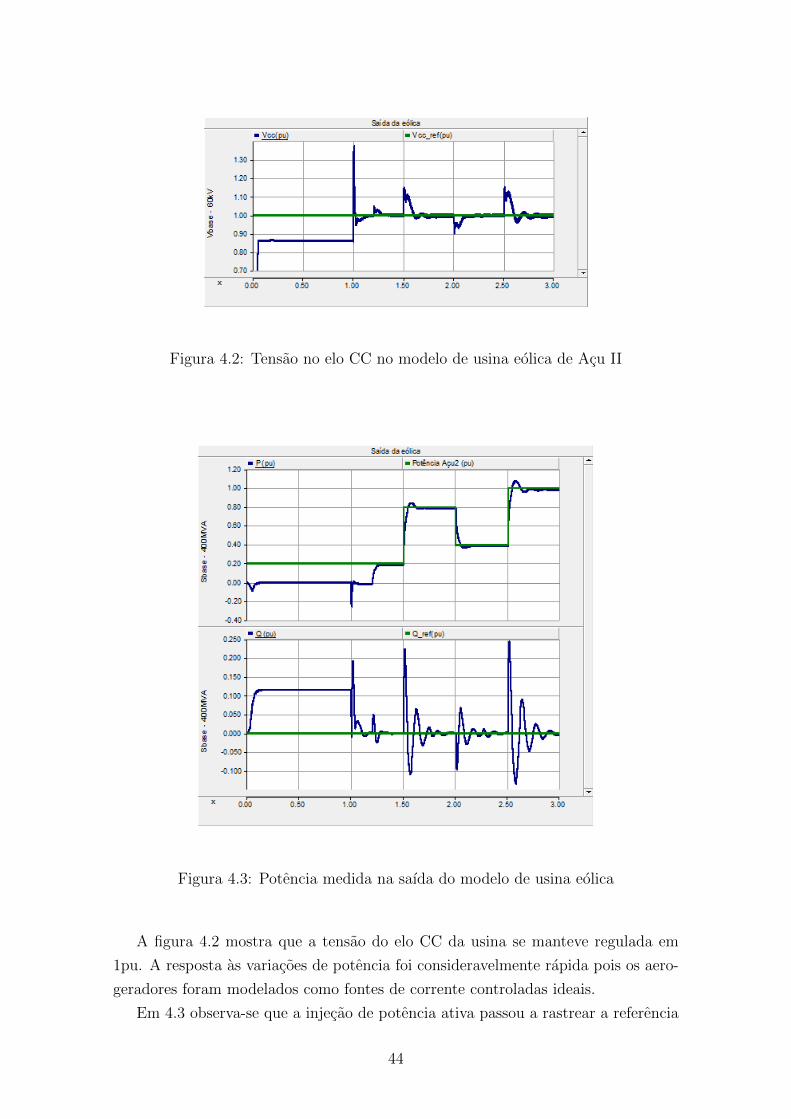
Figura 4.2: Tensao no elo CC no modelo de usina eolica de Acu II
Figura 4.3: Potencia medida na saıda do modelo de usina eolica
A figura 4.2 mostra que a tensao do elo CC da usina se manteve regulada em
1pu. A resposta as variacoes de potencia foi consideravelmente rapida pois os aero-
geradores foram modelados como fontes de corrente controladas ideais.
Em 4.3 observa-se que a injecao de potencia ativa passou a rastrear a referencia
44
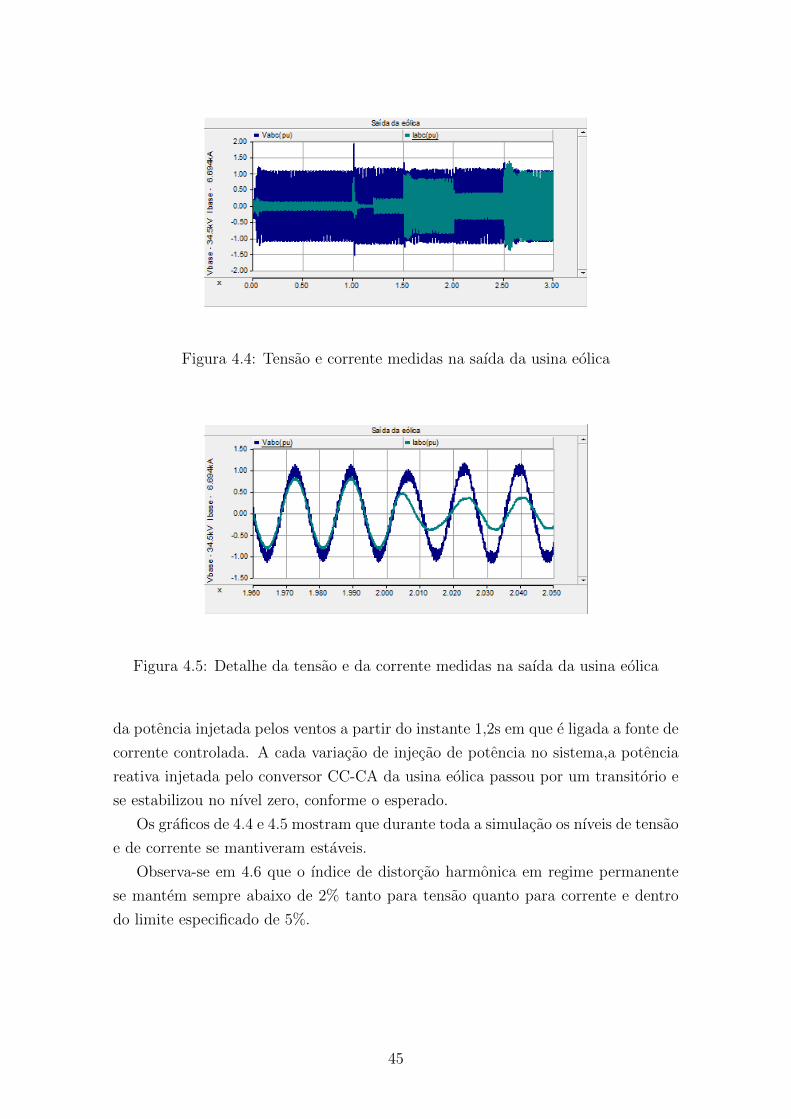
Figura 4.4: Tensao e corrente medidas na saıda da usina eolica
Figura 4.5: Detalhe da tensao e da corrente medidas na saıda da usina eolica
da potencia injetada pelos ventos a partir do instante 1,2s em que e ligada a fonte de
corrente controlada. A cada variacao de injecao de potencia no sistema,a potencia
reativa injetada pelo conversor CC-CA da usina eolica passou por um transitorio e
se estabilizou no nıvel zero, conforme o esperado.
Os graficos de 4.4 e 4.5 mostram que durante toda a simulacao os nıveis de tensao
e de corrente se mantiveram estaveis.
Observa-se em 4.6 que o ındice de distorcao harmonica em regime permanente
se mantem sempre abaixo de 2% tanto para tensao quanto para corrente e dentro
do limite especificado de 5%.
45
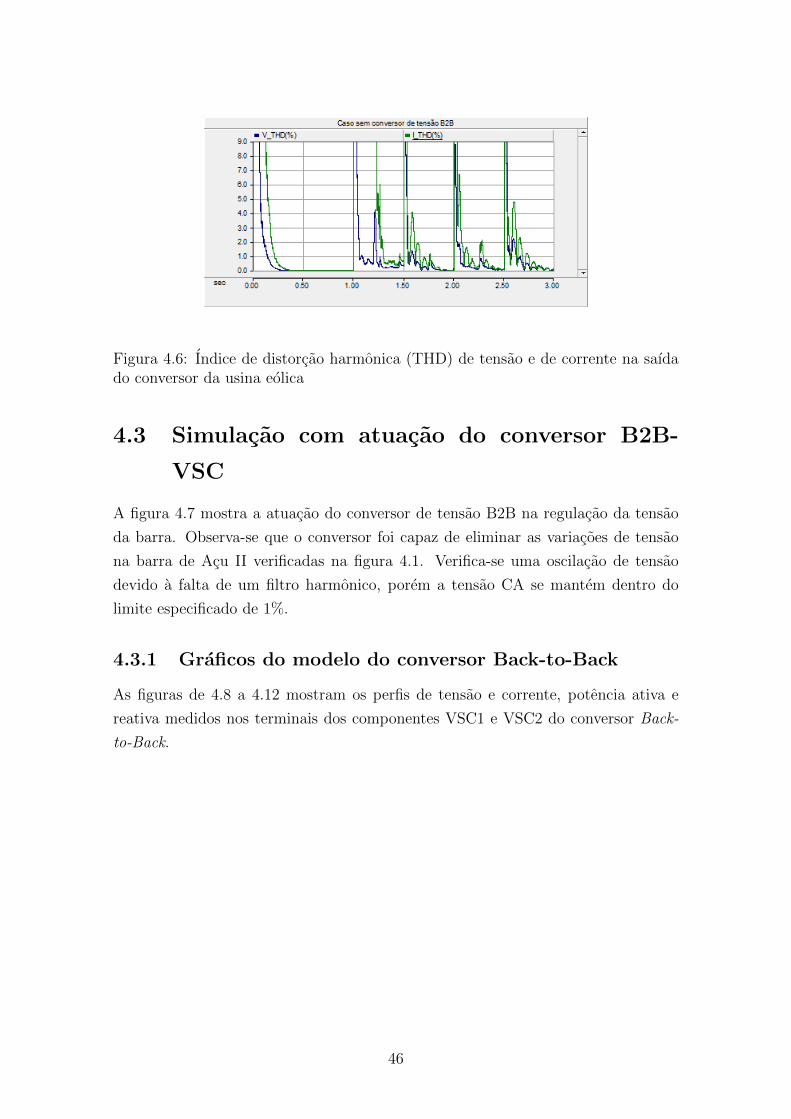
Figura 4.6: Indice de distorcao harmonica (THD) de tensao e de corrente na saıdado conversor da usina eolica
4.3 Simulacao com atuacao do conversor B2B-
VSC
A figura 4.7 mostra a atuacao do conversor de tensao B2B na regulacao da tensao
da barra. Observa-se que o conversor foi capaz de eliminar as variacoes de tensao
na barra de Acu II verificadas na figura 4.1. Verifica-se uma oscilacao de tensao
devido a falta de um filtro harmonico, porem a tensao CA se mantem dentro do
limite especificado de 1%.
4.3.1 Graficos do modelo do conversor Back-to-Back
As figuras de 4.8 a 4.12 mostram os perfis de tensao e corrente, potencia ativa e
reativa medidos nos terminais dos componentes VSC1 e VSC2 do conversor Back-
to-Back.
46
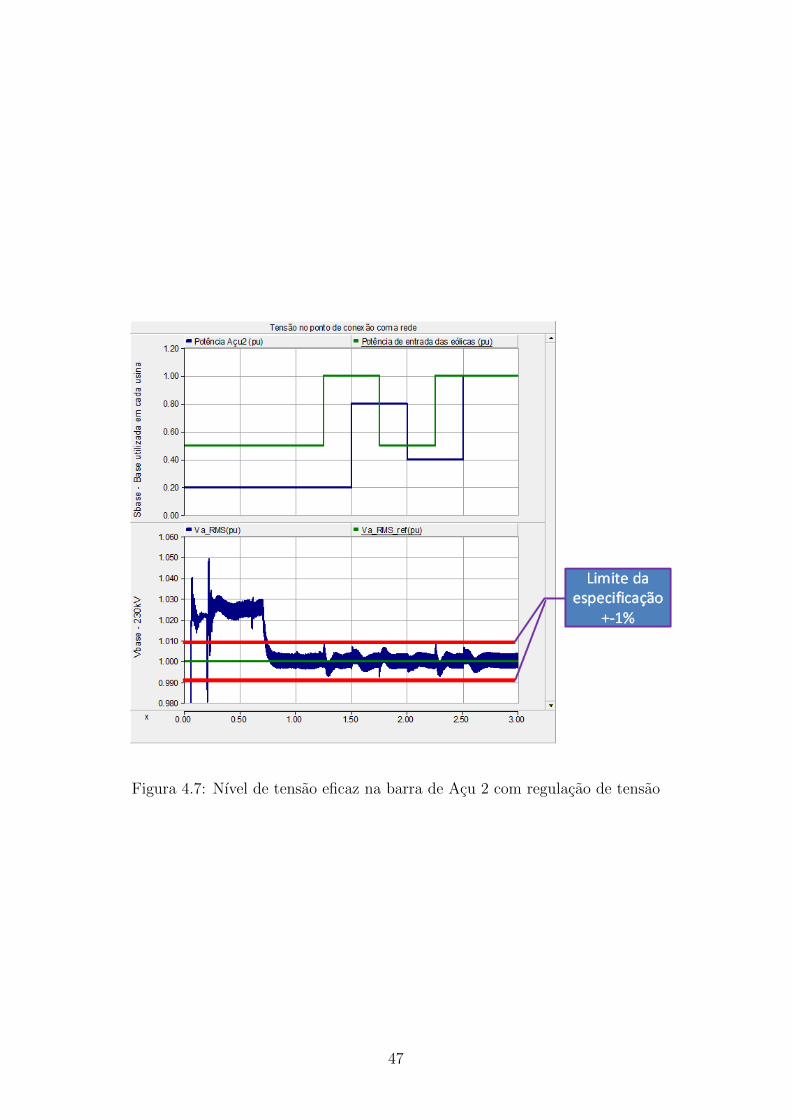
Figura 4.7: Nıvel de tensao eficaz na barra de Acu 2 com regulacao de tensao
47
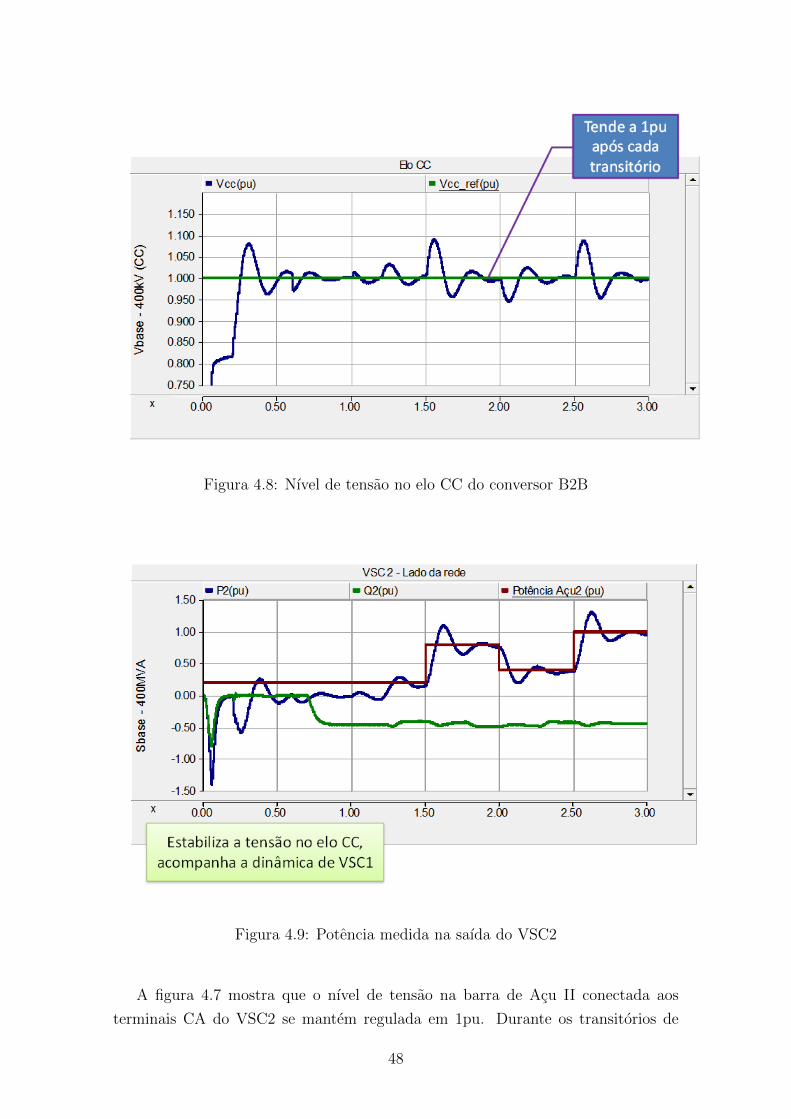
Figura 4.8: Nıvel de tensao no elo CC do conversor B2B
Figura 4.9: Potencia medida na saıda do VSC2
A figura 4.7 mostra que o nıvel de tensao na barra de Acu II conectada aos
terminais CA do VSC2 se mantem regulada em 1pu. Durante os transitorios de
48
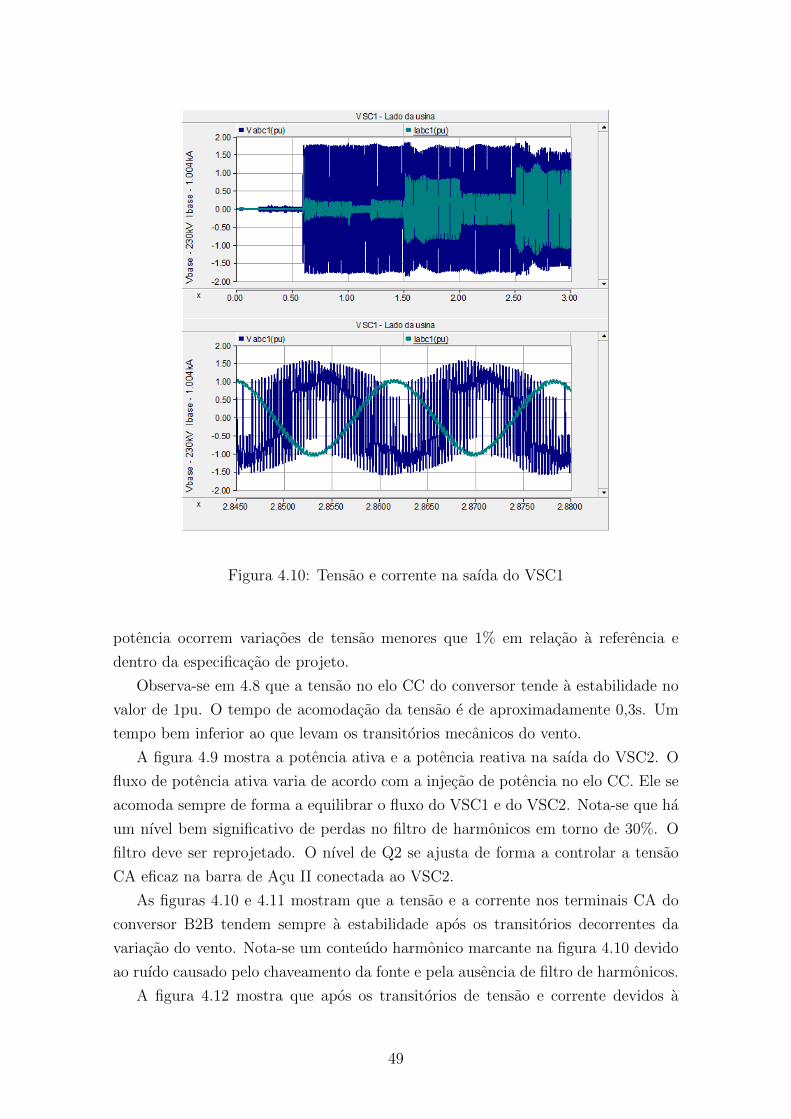
Figura 4.10: Tensao e corrente na saıda do VSC1
potencia ocorrem variacoes de tensao menores que 1% em relacao a referencia e
dentro da especificacao de projeto.
Observa-se em 4.8 que a tensao no elo CC do conversor tende a estabilidade no
valor de 1pu. O tempo de acomodacao da tensao e de aproximadamente 0,3s. Um
tempo bem inferior ao que levam os transitorios mecanicos do vento.
A figura 4.9 mostra a potencia ativa e a potencia reativa na saıda do VSC2. O
fluxo de potencia ativa varia de acordo com a injecao de potencia no elo CC. Ele se
acomoda sempre de forma a equilibrar o fluxo do VSC1 e do VSC2. Nota-se que ha
um nıvel bem significativo de perdas no filtro de harmonicos em torno de 30%. O
filtro deve ser reprojetado. O nıvel de Q2 se ajusta de forma a controlar a tensao
CA eficaz na barra de Acu II conectada ao VSC2.
As figuras 4.10 e 4.11 mostram que a tensao e a corrente nos terminais CA do
conversor B2B tendem sempre a estabilidade apos os transitorios decorrentes da
variacao do vento. Nota-se um conteudo harmonico marcante na figura 4.10 devido
ao ruıdo causado pelo chaveamento da fonte e pela ausencia de filtro de harmonicos.
A figura 4.12 mostra que apos os transitorios de tensao e corrente devidos a
49
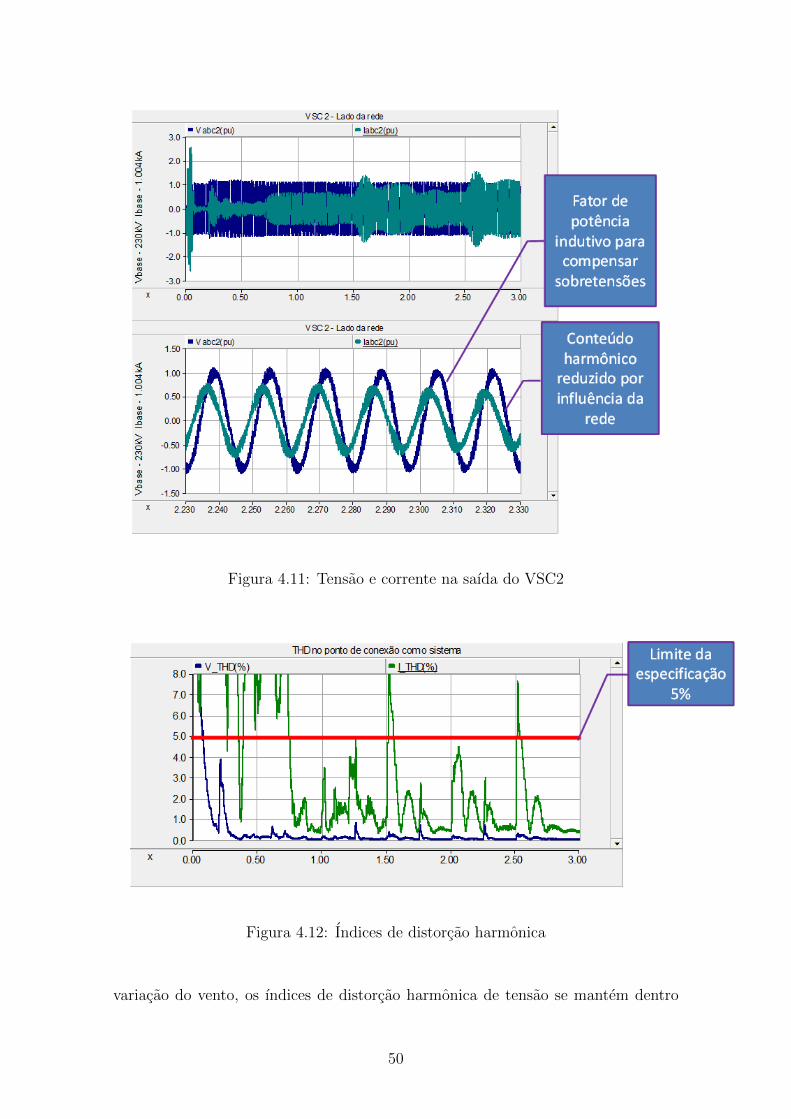
Figura 4.11: Tensao e corrente na saıda do VSC2
Figura 4.12: Indices de distorcao harmonica
variacao do vento, os ındices de distorcao harmonica de tensao se mantem dentro
50

do limite especificado de 5% durante o regime permanente.
4.3.2 Compensacao de afundamento de tensao por cargas
conectadas a barra
De forma a testar o controle de tensao do VSC2 durante afundamentos maiores de
tensao, foi conectado um reator shunt com reatancia 0,168pu na base do conversor
ao ponto de conexao comum em Acu II aos 0,6s de simulacao. A potencia injetada
pelas usinas eolicas de Acu II foi mantida constante em 1pu a partir do instante
1,2s.
Figura 4.13: Afundamento de tensao causado pelo reator shunt
A figura 4.13 mostra que o VSC2 foi capaz de compensar o afundamento de 15%
causado pela carga conectada.
Observa-se na figura4.14 que a tensao do elo CC se estabiliza em 1pu apos os
transitorios eletricos.
A figura 4.15 mostra que os ındices de distorcao harmonica de corrente e de
tensao se mantem a abaixo de 1% em regime permanente, respeitando o limite da
especificacao de projeto de 5%.
51
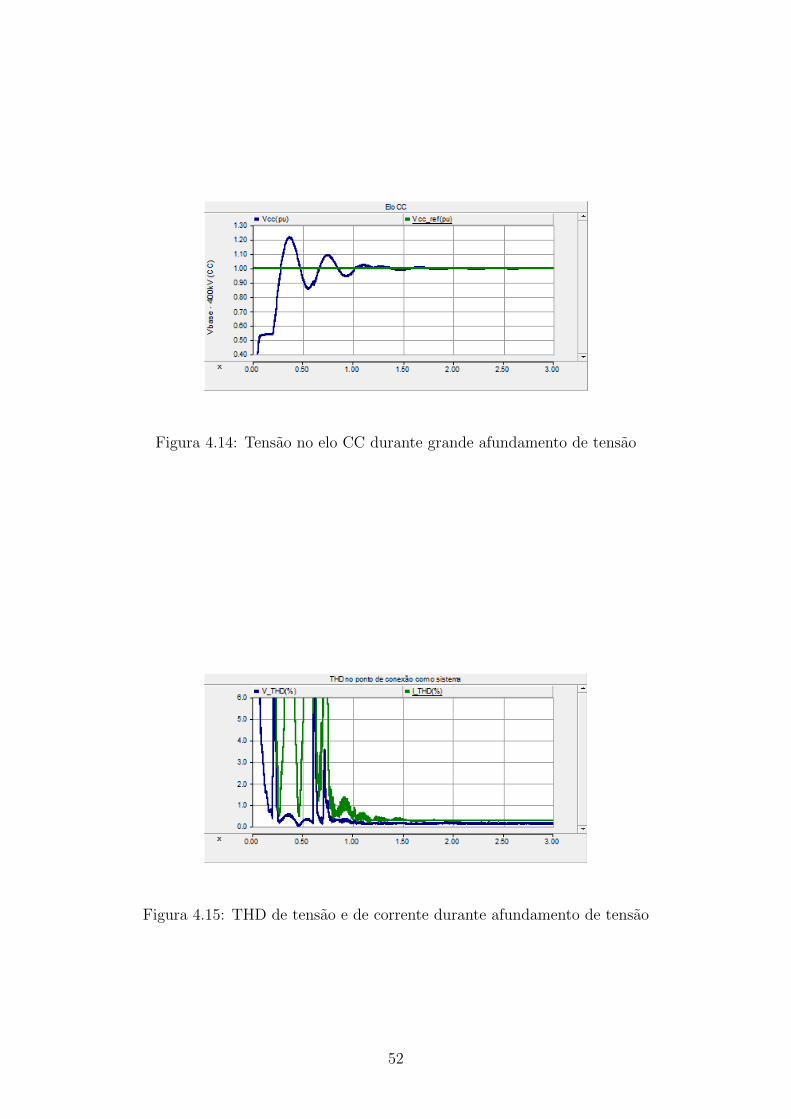
Figura 4.14: Tensao no elo CC durante grande afundamento de tensao
Figura 4.15: THD de tensao e de corrente durante afundamento de tensao
52
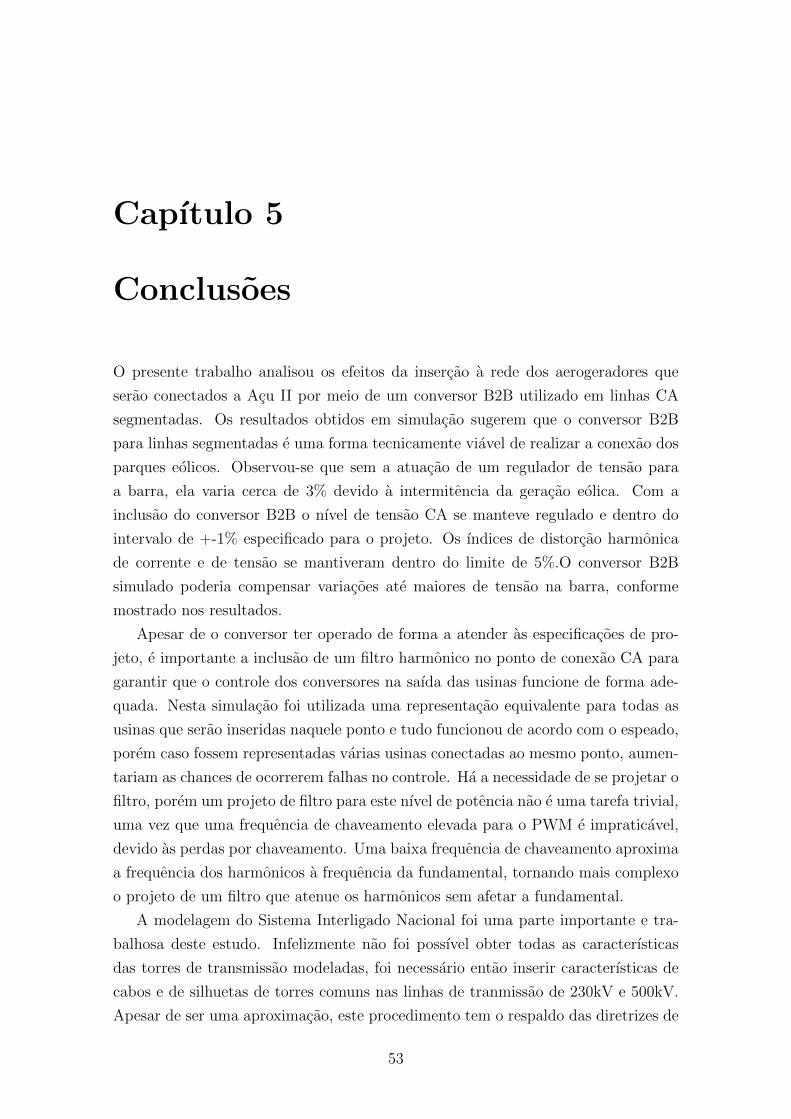
Capıtulo 5
Conclusoes
O presente trabalho analisou os efeitos da insercao a rede dos aerogeradores que
serao conectados a Acu II por meio de um conversor B2B utilizado em linhas CA
segmentadas. Os resultados obtidos em simulacao sugerem que o conversor B2B
para linhas segmentadas e uma forma tecnicamente viavel de realizar a conexao dos
parques eolicos. Observou-se que sem a atuacao de um regulador de tensao para
a barra, ela varia cerca de 3% devido a intermitencia da geracao eolica. Com a
inclusao do conversor B2B o nıvel de tensao CA se manteve regulado e dentro do
intervalo de +-1% especificado para o projeto. Os ındices de distorcao harmonica
de corrente e de tensao se mantiveram dentro do limite de 5%.O conversor B2B
simulado poderia compensar variacoes ate maiores de tensao na barra, conforme
mostrado nos resultados.
Apesar de o conversor ter operado de forma a atender as especificacoes de pro-
jeto, e importante a inclusao de um filtro harmonico no ponto de conexao CA para
garantir que o controle dos conversores na saıda das usinas funcione de forma ade-
quada. Nesta simulacao foi utilizada uma representacao equivalente para todas as
usinas que serao inseridas naquele ponto e tudo funcionou de acordo com o espeado,
porem caso fossem representadas varias usinas conectadas ao mesmo ponto, aumen-
tariam as chances de ocorrerem falhas no controle. Ha a necessidade de se projetar o
filtro, porem um projeto de filtro para este nıvel de potencia nao e uma tarefa trivial,
uma vez que uma frequencia de chaveamento elevada para o PWM e impraticavel,
devido as perdas por chaveamento. Uma baixa frequencia de chaveamento aproxima
a frequencia dos harmonicos a frequencia da fundamental, tornando mais complexo
o projeto de um filtro que atenue os harmonicos sem afetar a fundamental.
A modelagem do Sistema Interligado Nacional foi uma parte importante e tra-
balhosa deste estudo. Infelizmente nao foi possıvel obter todas as caracterısticas
das torres de transmissao modeladas, foi necessario entao inserir caracterısticas de
cabos e de silhuetas de torres comuns nas linhas de tranmissao de 230kV e 500kV.
Apesar de ser uma aproximacao, este procedimento tem o respaldo das diretrizes de
53
estudos eletricos do ONS [8]. A modelagem do equivalente do sistema eletrico em
PSCAD se mostrou uma tarefa muito suscetıvel a erros humanos, devido a forma
com que sao inseridos os dados e serviu de inspiracao para trabalhos futuros.
Trabalhos Futuros
• A modelagem do equivalente do sistema em PSCAD a partir dos dados obtidos
do SAPRE ou do ANAFAS e um processo trabalhoso e sujeito a erros devido
a forma com que o relatorio do SAPRE/ANAFAS apresenta os dados para o
usuario e que os parametros da rede sao inseridos no PSCAD. Para facilitar o
trabalho da modelagem do sistema eletrico de potencia nos proximos trabalhos,
pretende-se fazer um algoritmo que receba o arquivo de texto .ANA e gere
um modelo de simulacao todo em linguagem de programacao que substitua o
equivalente modelado no PSCAD.
• As simulacoes em PSCAD podem levar muito tempo quando sao utilizados
modelos com muitos detalhes, chegando a durar muitas horas.Quando as si-
mulacoes contem conversores com controle PWM, a frequencia elevada de cha-
veamento impede que se utilize um passo maior de integracao. Rodando a
mesma simulacao em computadores com processadores com frequencias de
clock bem diferentes, observou-se uma performances bem semelhante do pro-
grama. Conclui-se entao que o PSCAD subutiliza os recursos de processamento
disponibilizados. Propoe-se uma busca por formas de agilizar as simulacooes,
inicialmente recorrendo ao recurso de thread computing, utilizando paralela-
mente nucleos de um mesmo processador ou ate outros computadores.
• Ha a necessidade de se projetar o filtro harmonico para os pontos de conexao
em CA.
• Dando continuidade ao estudo apresentado neste trabalho, serao adicionados
modelos mais complexos das maquinas eletricas conectadas a rede, de forma
que seja possıvel observar com mais clareza seu transitorio eletromecanico na
ocorrencia de faltas e se o conversor Back-to-Back sera capaz de mitigar os
efeitos de perda de estabilidade de tensao e de frequencia na rede eletrica, alem
de realizar a analise do comportamento do sistema na ocorrencia de faltas.
Para chegar a este ponto, tentaremos primeiro encontrar modos de agilizar as
simulacoes. Nestes estudos o conversor B2B sera inserido no contexto original
de linhas CA segmentadas, nao de forma radial com a usina eolica.
• Ha estudos relativamente recentes a respeito da aplicacao de inversores que
operem de forma semelhante a dos geradores sıncronos. Sao chamados static
54

synchronous generators. A ideia e que se utilizem estes conversores para fazer
a interface entre a rede eletrica e fontes intermitentes de energia como a so-
lar e a eolica. Sua forma de operacao permitiria aplicar as mesmas tecnicas e
ferramentas ja existentes para maquinas sıncronas. Ha a possibilidade de subs-
tituir os conversores B2B propostos neste trabalho por esta nova tecnologia
no futuro.
55
Referencias Bibliograficas
[1] WATANABE, E. H., PEDROSO, A. S., FERREIRA, A. C., et al. Alternativas
nao convencionais para transmissao de energia eletrica: meia onda+ e
transmissao CA Segmentada. 1 ed. Brasılia, Projeto Transmitir, 2013.
[2] EPE. Balanco Energetico Nacional - Ano base 2013. Relatorio tecnico, 2014.
[3] DO AMARANTE, O. A. C., BROWER, M., ZACK, J., et al. Atlas do Potencial
Eolico Brasileiro. 1 ed. Brasılia, CRESESB, 2001.
[4] DOS SANTOS, A. C., SILVA, B. B. S., FEDOZZI, L. M., et al. “Estudo com-
parativo entre o potencial eolico de Natal-RN e Uberlandia-MG”, Con-
ferencia de Estudos em Engenharia Eletrica, v. X, Setembro 2012.
[5] RAMPINELLI, G. A., DA ROSA JUNIOR, C. G. “Analise da Geracao Eolica
na Matriz Brasileira de Energia Eletrica”, Revista Ciencias Exatas e Na-
turais, v. 14, n. 2, pp. 273–302, Julho-Setembro 2012.
[6] AKAGI, H., WATANABE, E. H., AREDES, M. Instantaneous Power Theory
And Applications To Power Conditioning. 1 ed. Brasılia, Projeto Trans-
mitir, March 2007.
[7] WATANABE, E. H., PEDROSO, A. S., FERREIRA, A. C., et al. Alternativas
nao convencionais para transmissao de energia eletrica: meia onda+ e
transmissao CA Segmentada. 1 ed. Brasılia, Projeto Transmitir, 2013.
[8] ONS. “Diretrizes e criterios para estudos eletricos, submodulo 23.3, revisao 1.1”.
2010.
[9] VIANNA, M. A. P. Desenvolvimento e Comparacao de Modelos Digitais de
Aerogeradores Para Estudos de Transitorios Eletromagneticos. Projeto de
graduacao, Universidade Federal do Rio de Janeiro, Rio de Janeiro, Rio
de Janeiro, Brasil, 2014.
[10] ONS. “Manual de Procedimentos da Operacao”. Dezembro 2014.
56
[11] DA SILVA DIAS, R. F. Derivacao ou injecao de energia em uma linha de
transmissao de pouco mais de meio comprimento de onda por dispositivos
de eletronica de potencia. Tese de D.Sc., COPPE/UFRJ, Rio de Janeiro,
RJ, Brasil, 2008.
[12] IEEE. “IEEE Recommended Practice and Requirements for Harmonic Control
in Electric Power Systems”. 2014.
[13] ONS. “Diretrizes e criterios para estudos eletricos, submodulo 25.6, revisao
1.1”. 2010.
57
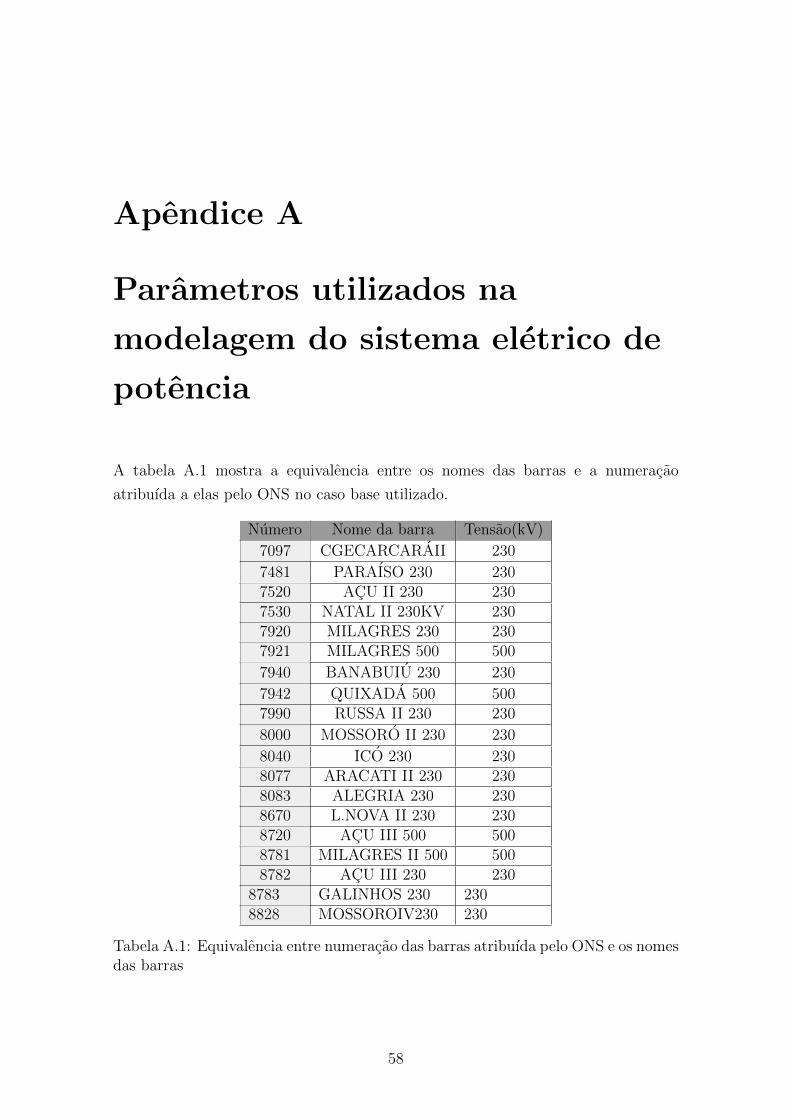
Apendice A
Parametros utilizados na
modelagem do sistema eletrico de
potencia
A tabela A.1 mostra a equivalencia entre os nomes das barras e a numeracao
atribuıda a elas pelo ONS no caso base utilizado.
Numero Nome da barra Tensao(kV)
7097 CGECARCARAII 230
7481 PARAISO 230 2307520 ACU II 230 2307530 NATAL II 230KV 2307920 MILAGRES 230 2307921 MILAGRES 500 500
7940 BANABUIU 230 230
7942 QUIXADA 500 5007990 RUSSA II 230 230
8000 MOSSORO II 230 230
8040 ICO 230 2308077 ARACATI II 230 2308083 ALEGRIA 230 2308670 L.NOVA II 230 2308720 ACU III 500 5008781 MILAGRES II 500 5008782 ACU III 230 230
8783 GALINHOS 230 2308828 MOSSOROIV230 230
Tabela A.1: Equivalencia entre numeracao das barras atribuıda pelo ONS e os nomesdas barras
58
A.1 Linhas em modelo pi concentrado para va-
lidacao do equivalente, transformadores e im-
pedancias de transferencia
A tabela A.2 mostra os valores utilizados na modelagem dos transformadores e
das linhas de transmissao em modelo pi utilizados na validacao do equivalente em
PSCAD. A tabela A.3 mostra os valores de impedancias do equivalente do sistema
que nao foram desprezadas. As impedancias ligadas a uma barra 0 estao conectadas
a um gerador equivalente.
A.2 Linhas de transmissao modeladas com
parametros distribuıdos e dependentes da
frequencia
A tabela A.4 mostra os parametros utilizados na modelagem de linhas de transmissao
do sistema eletrico de potencia. As linhas de 230kV possuem flecha 0, pois a altura
dos cabos inserida na silhueta da torre no modelo do PSCAD corresponde ao valor
medio da catenaria descrita pelas linhas. Para as linhas de tranmissao em 230kV
foram utilizados os cabos para-raios 3/8 EHS e para as linhas de transmissao em
500kV foram utilizados os cabos 1/2 High Strength Steel. A resistividade do solo foi
alterada do valor padrao do PSCAD para 1000kΩ/m. As alturas das linhas foram
mostradas no capıtulo 3. Os demais parametros do modelo foram mantidos nos
valores padrao do PSCAD.
59
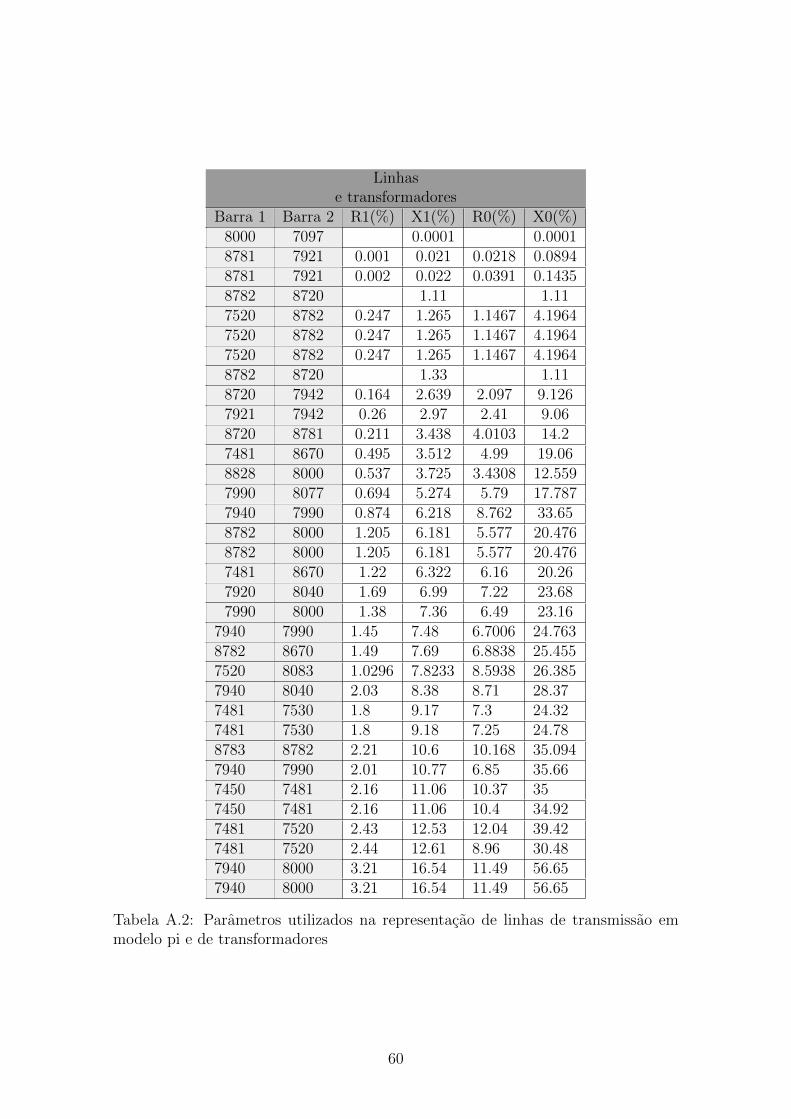
Linhase transformadores
Barra 1 Barra 2 R1(%) X1(%) R0(%) X0(%)8000 7097 0.0001 0.00018781 7921 0.001 0.021 0.0218 0.08948781 7921 0.002 0.022 0.0391 0.14358782 8720 1.11 1.117520 8782 0.247 1.265 1.1467 4.19647520 8782 0.247 1.265 1.1467 4.19647520 8782 0.247 1.265 1.1467 4.19648782 8720 1.33 1.118720 7942 0.164 2.639 2.097 9.1267921 7942 0.26 2.97 2.41 9.068720 8781 0.211 3.438 4.0103 14.27481 8670 0.495 3.512 4.99 19.068828 8000 0.537 3.725 3.4308 12.5597990 8077 0.694 5.274 5.79 17.7877940 7990 0.874 6.218 8.762 33.658782 8000 1.205 6.181 5.577 20.4768782 8000 1.205 6.181 5.577 20.4767481 8670 1.22 6.322 6.16 20.267920 8040 1.69 6.99 7.22 23.687990 8000 1.38 7.36 6.49 23.16
7940 7990 1.45 7.48 6.7006 24.7638782 8670 1.49 7.69 6.8838 25.4557520 8083 1.0296 7.8233 8.5938 26.3857940 8040 2.03 8.38 8.71 28.377481 7530 1.8 9.17 7.3 24.327481 7530 1.8 9.18 7.25 24.788783 8782 2.21 10.6 10.168 35.0947940 7990 2.01 10.77 6.85 35.667450 7481 2.16 11.06 10.37 357450 7481 2.16 11.06 10.4 34.927481 7520 2.43 12.53 12.04 39.427481 7520 2.44 12.61 8.96 30.487940 8000 3.21 16.54 11.49 56.657940 8000 3.21 16.54 11.49 56.65
Tabela A.2: Parametros utilizados na representacao de linhas de transmissao emmodelo pi e de transformadores
60
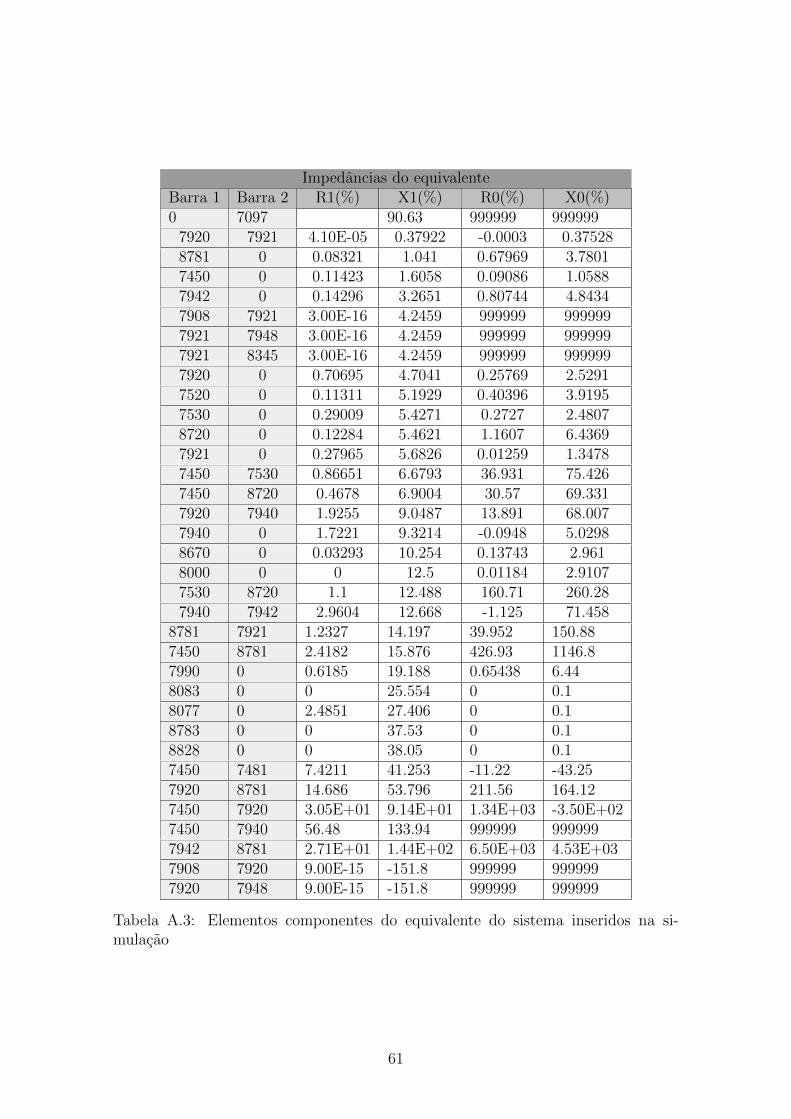
Impedancias do equivalenteBarra 1 Barra 2 R1(%) X1(%) R0(%) X0(%)0 7097 90.63 999999 999999
7920 7921 4.10E-05 0.37922 -0.0003 0.375288781 0 0.08321 1.041 0.67969 3.78017450 0 0.11423 1.6058 0.09086 1.05887942 0 0.14296 3.2651 0.80744 4.84347908 7921 3.00E-16 4.2459 999999 9999997921 7948 3.00E-16 4.2459 999999 9999997921 8345 3.00E-16 4.2459 999999 9999997920 0 0.70695 4.7041 0.25769 2.52917520 0 0.11311 5.1929 0.40396 3.91957530 0 0.29009 5.4271 0.2727 2.48078720 0 0.12284 5.4621 1.1607 6.43697921 0 0.27965 5.6826 0.01259 1.34787450 7530 0.86651 6.6793 36.931 75.4267450 8720 0.4678 6.9004 30.57 69.3317920 7940 1.9255 9.0487 13.891 68.0077940 0 1.7221 9.3214 -0.0948 5.02988670 0 0.03293 10.254 0.13743 2.9618000 0 0 12.5 0.01184 2.91077530 8720 1.1 12.488 160.71 260.287940 7942 2.9604 12.668 -1.125 71.458
8781 7921 1.2327 14.197 39.952 150.887450 8781 2.4182 15.876 426.93 1146.87990 0 0.6185 19.188 0.65438 6.448083 0 0 25.554 0 0.18077 0 2.4851 27.406 0 0.18783 0 0 37.53 0 0.18828 0 0 38.05 0 0.17450 7481 7.4211 41.253 -11.22 -43.257920 8781 14.686 53.796 211.56 164.127450 7920 3.05E+01 9.14E+01 1.34E+03 -3.50E+027450 7940 56.48 133.94 999999 9999997942 8781 2.71E+01 1.44E+02 6.50E+03 4.53E+037908 7920 9.00E-15 -151.8 999999 9999997920 7948 9.00E-15 -151.8 999999 999999
Tabela A.3: Elementos componentes do equivalente do sistema inseridos na si-mulacao
61
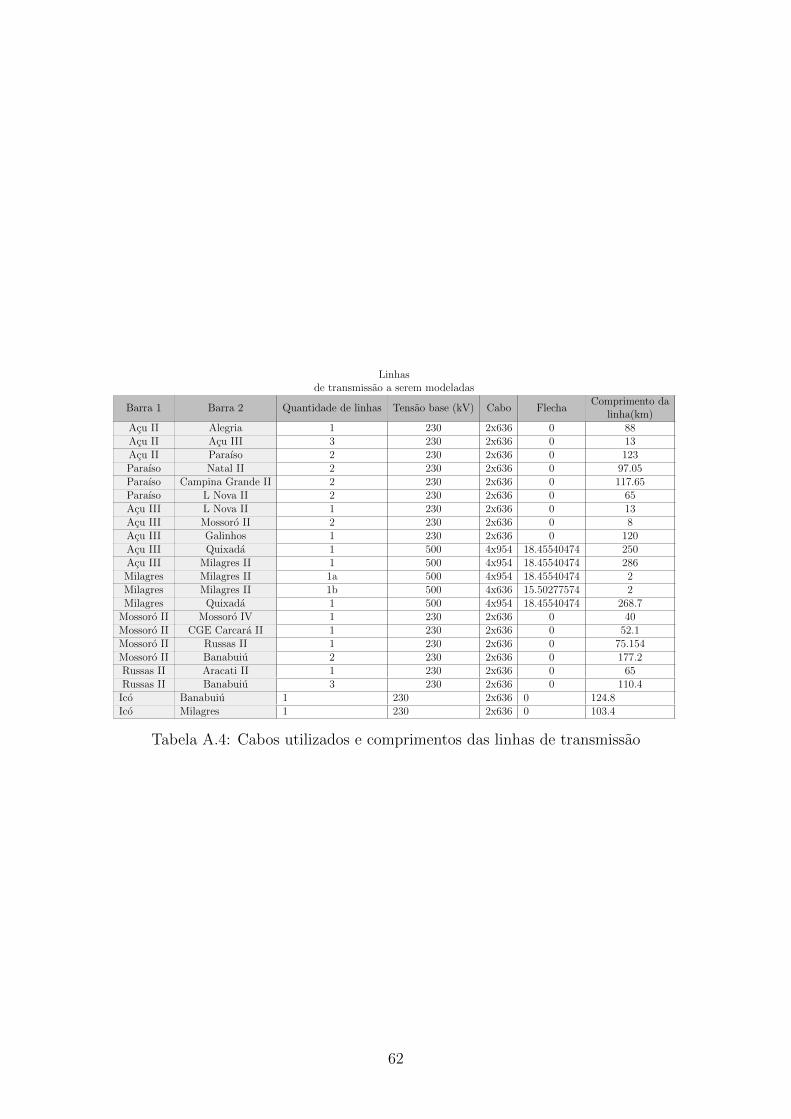
Linhasde transmissao a serem modeladas
Barra 1 Barra 2 Quantidade de linhas Tensao base (kV) Cabo FlechaComprimento da
linha(km)Acu II Alegria 1 230 2x636 0 88Acu II Acu III 3 230 2x636 0 13Acu II Paraıso 2 230 2x636 0 123Paraıso Natal II 2 230 2x636 0 97.05Paraıso Campina Grande II 2 230 2x636 0 117.65Paraıso L Nova II 2 230 2x636 0 65Acu III L Nova II 1 230 2x636 0 13Acu III Mossoro II 2 230 2x636 0 8Acu III Galinhos 1 230 2x636 0 120Acu III Quixada 1 500 4x954 18.45540474 250Acu III Milagres II 1 500 4x954 18.45540474 286Milagres Milagres II 1a 500 4x954 18.45540474 2Milagres Milagres II 1b 500 4x636 15.50277574 2Milagres Quixada 1 500 4x954 18.45540474 268.7
Mossoro II Mossoro IV 1 230 2x636 0 40Mossoro II CGE Carcara II 1 230 2x636 0 52.1Mossoro II Russas II 1 230 2x636 0 75.154Mossoro II Banabuiu 2 230 2x636 0 177.2Russas II Aracati II 1 230 2x636 0 65Russas II Banabuiu 3 230 2x636 0 110.4
Ico Banabuiu 1 230 2x636 0 124.8Ico Milagres 1 230 2x636 0 103.4
Tabela A.4: Cabos utilizados e comprimentos das linhas de transmissao
62
Apendice B
Modelo de aerogeradores
sıncronos de ımas permanentes
(PMSG) para simulacao de
transitorios eletromecanicos
O modelo de gerador eolico e baseado no que foi desenvolvido em [9]. O circuito de
potencia utilizado para representar a insercao de usinas eolicas no sistema e visto
na figura B.1.
O no eletrico con sis representa o ponto de ligacao com a representacao do Sis-
tema Interligado Nacional. Os parametros de entrada do modelo do aerogerador
serao explicados em detalhes nos proximos topicos. O modulo PMSG contem o
modelo eletromecanico do aerogerador, o conversor B2B que faz a interface com a
rede e seus respectivos sistemas de controle. Os sinais Pe PMSG e Pr PMSG sao
respectivamente os sinais de disparo dos conversores no lado da maquina e no lado
da rede. O circuito de potencia do modulo PMSG e mostrado na figura B.2.
B.1 Modelo eletromecanico do aerogerador
O fluxo de potencia dos aerogeradores e dependente da incidencia de vento sobre
as pas. O modelo utilizado trabalha a uma velocidade constante do rotor, fazendo
com que a potencia mecanica de entrada em regime permanente varie apenas com
o valor do torque do vento. A figura B.3 exibe o modelo eletromecanico utilizado e
a malha de realimentacao da velocidade mecanica.
O modelo de maquina utilizado e o de maquina de ımas permanentes (permanent
magnet machine) que se encontra na biblioteca do PSCAD na secao ”MACHINES”.
Nao foram alteradas as resistencias e reatancias da maquina, mantendo os valores
63
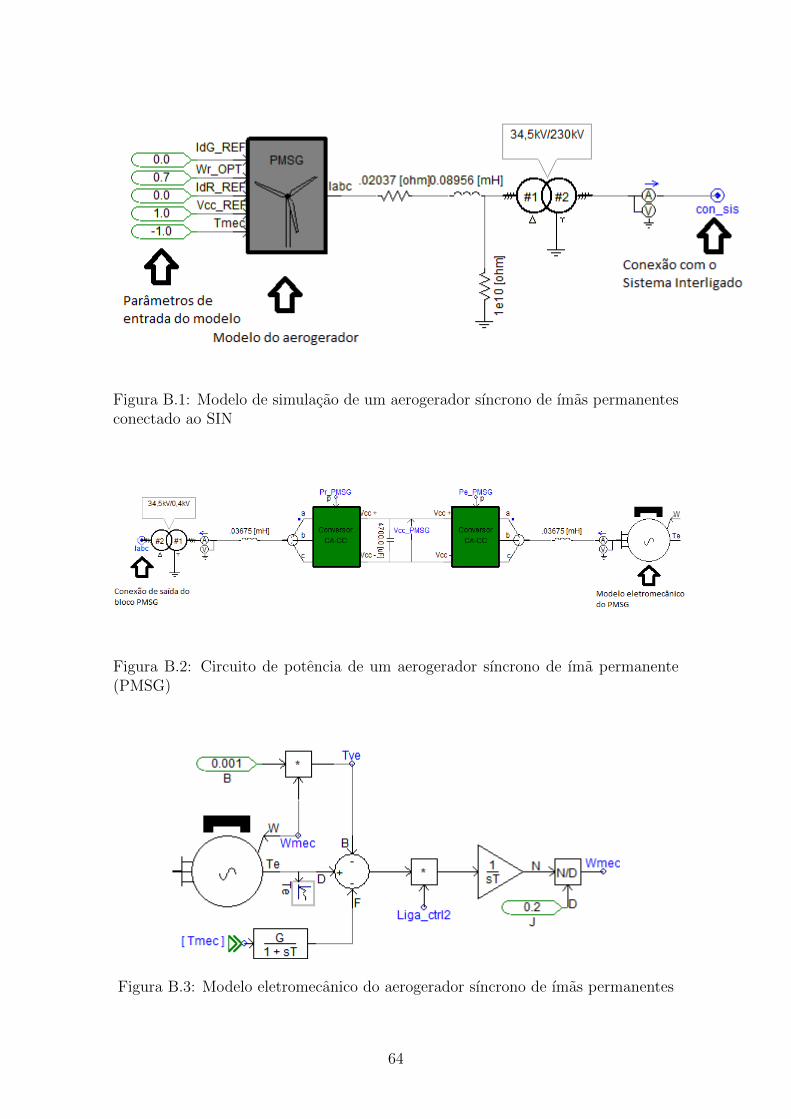
Figura B.1: Modelo de simulacao de um aerogerador sıncrono de ımas permanentesconectado ao SIN
Figura B.2: Circuito de potencia de um aerogerador sıncrono de ıma permanente(PMSG)
Figura B.3: Modelo eletromecanico do aerogerador sıncrono de ımas permanentes
64
padrao do modelo da biblioteca.
Este modelo de maquina do PSCAD trabalha apenas no modo de controle de
velocidade, para que o controle seja realizado pelo torque se faz necessaria uma
malha de realimentacao da velocidade mecanica. A velocidade mecanica e calculada
a partir da integracao do torque resultante sobre o rotor e do momento de inercia
J. O torque resultante Tr e dado por B.1.
Tr = Te − Tve − Tmec (B.1)
Onde Te e o torque eletrico calculado pelo modelo eletromecanico, Tve e o torque
resultante do atrito proporcional a velocidade e Tmec e o torque do vento sobre as
pas, que pode ser controlador por uma variavel de entrada do modulo PMSG. Para
que a maquina opere como um gerador, o torque Tmec deve possuir valores negativos.
E importante ressaltar que os valores do torque devem passar por filtros passa-baixa
pois oscilacoes acentuadas podem desestabilizar o sistema de controle. A variavel
Liga ctrl2 mantem desligada a acao integral da malha enquanto o sistema nao tiver
entrado em regime para que se evite o mau funcionamento do sistema de controle
durante o transitorio de partida.
B.2 Sistema de controle do conversor B2B de in-
terface com a rede eletrica
Para que os aerogeradores trabalhem a uma velocidade mecanica constante, se faz
necessario que o fluxo de potencia eletrica da maquina para a rede seja igual a
potencia mecanica fornecida pelo vento menos as perdas mecanicas e eletricas do
conjunto gerador. Para controlar este fluxo de potencia, utiliza-se um conversor
B2B que faz a interface entre os aerogeradores e a rede eletrica. Este conversor
possui uma topologia identica a do conversor utilizado no seccionamento da linha
CA, porem o seu sistema de controle e ligeiramente diferente.
O fluxo de potencia e regulado por uma malha de controle de corrente. O uso de
coordenadas dq0 permite a utilizacao de controladores de acao integral para rastrear
os sinais de referencia. O PLL utilizado na simulacao sincroniza a fase zero com a
passagem da tensao da fase A pelo valor zero. Isso implica que apos atingido o
sincronismo de fase, o componente D da tensao valera zero, permitindo simplificar
2.6 para P = 1.5Vq(t)Iq(t) e 2.7 para Q = 1.5Vq(t)Id(t). Essas relacoes simplificadas
evidenciam que para esta estrategia de controle, a potencia ativa depende apenas
do componente em quadratura da corrente e a potencia reativa depende apenas do
componente direto da corrente.
O controle do fluxo de potencia ativa realizado pelo conversor do lado da maquina
65
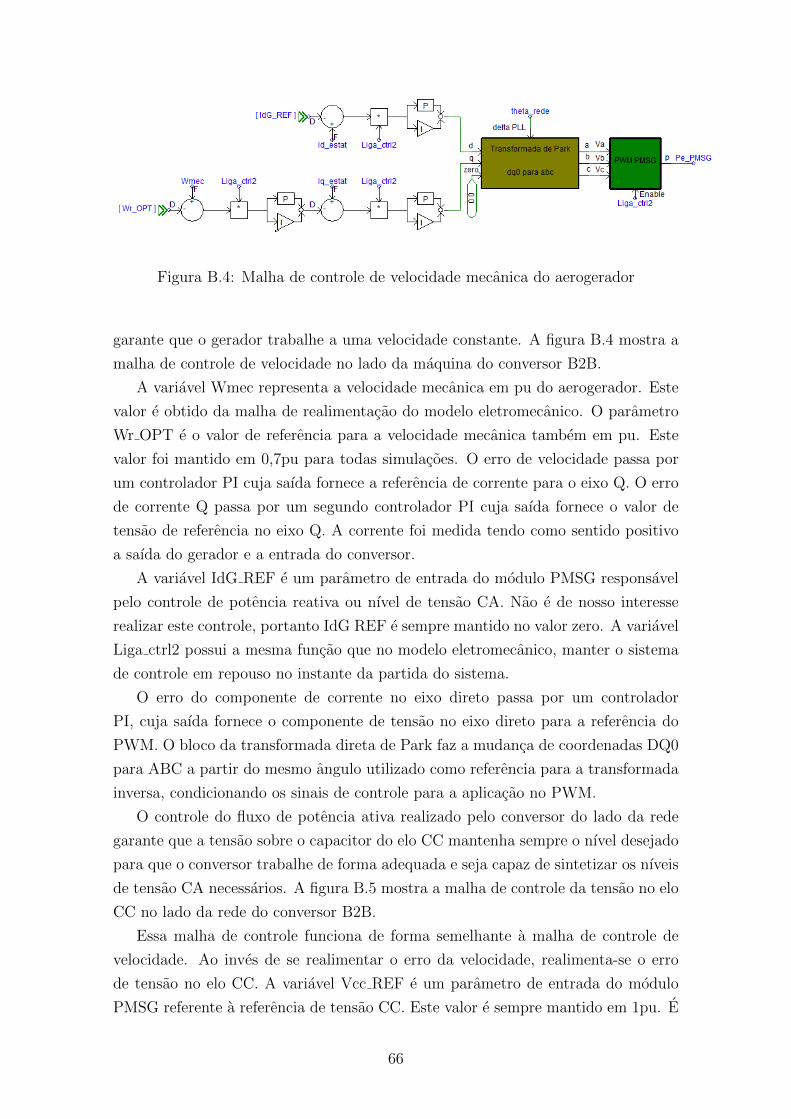
Figura B.4: Malha de controle de velocidade mecanica do aerogerador
garante que o gerador trabalhe a uma velocidade constante. A figura B.4 mostra a
malha de controle de velocidade no lado da maquina do conversor B2B.
A variavel Wmec representa a velocidade mecanica em pu do aerogerador. Este
valor e obtido da malha de realimentacao do modelo eletromecanico. O parametro
Wr OPT e o valor de referencia para a velocidade mecanica tambem em pu. Este
valor foi mantido em 0,7pu para todas simulacoes. O erro de velocidade passa por
um controlador PI cuja saıda fornece a referencia de corrente para o eixo Q. O erro
de corrente Q passa por um segundo controlador PI cuja saıda fornece o valor de
tensao de referencia no eixo Q. A corrente foi medida tendo como sentido positivo
a saıda do gerador e a entrada do conversor.
A variavel IdG REF e um parametro de entrada do modulo PMSG responsavel
pelo controle de potencia reativa ou nıvel de tensao CA. Nao e de nosso interesse
realizar este controle, portanto IdG REF e sempre mantido no valor zero. A variavel
Liga ctrl2 possui a mesma funcao que no modelo eletromecanico, manter o sistema
de controle em repouso no instante da partida do sistema.
O erro do componente de corrente no eixo direto passa por um controlador
PI, cuja saıda fornece o componente de tensao no eixo direto para a referencia do
PWM. O bloco da transformada direta de Park faz a mudanca de coordenadas DQ0
para ABC a partir do mesmo angulo utilizado como referencia para a transformada
inversa, condicionando os sinais de controle para a aplicacao no PWM.
O controle do fluxo de potencia ativa realizado pelo conversor do lado da rede
garante que a tensao sobre o capacitor do elo CC mantenha sempre o nıvel desejado
para que o conversor trabalhe de forma adequada e seja capaz de sintetizar os nıveis
de tensao CA necessarios. A figura B.5 mostra a malha de controle da tensao no elo
CC no lado da rede do conversor B2B.
Essa malha de controle funciona de forma semelhante a malha de controle de
velocidade. Ao inves de se realimentar o erro da velocidade, realimenta-se o erro
de tensao no elo CC. A variavel Vcc REF e um parametro de entrada do modulo
PMSG referente a referencia de tensao CC. Este valor e sempre mantido em 1pu. E
66

Figura B.5: Malha de controle da tensao no elo CC
importante ressaltar que o sentido positivo de corrente nesta malha e para fora do
conversor. Entao para um erro positivo de tensao no elo CC, o controle aumenta o
fluxo de potencia no sentido do conversor para a rede, reduzindo a tensao no elo.
Para um erro negativo de tensao, o controle diminui o fluxo de potencia do conversor
para a rede elevando a tensao no elo.
O sinal do erro de tensao CC passa por um controlador PI, cuja saıda serve
de referencia para o componente de corrente no eixo Q. O erro do componente de
corrente do eixo em quadratura passa por um segundo controlador PI, cuja saıda
fornece o componente em eixo direto da referencia de tensao para o PWM.
De forma semelhante a malha de controle no lado da maquina, a variavel IdR -
REF referente ao controle de potencia reativa ou nıvel de tensao CA no lado da rede
e mantida sempre em zero. E possıvel realizar controle de tensao na barra CA por
meio do conversor B2B de interface com a rede, porem isto e desnecessario, uma vez
que o conversor da linha de transmissao ja se encarrega desta funcao. A variavel
Liga ctrl1 tambem serve para manter o sistema de controle em repouso durante a
partida, porem ela comuta do nıvel zero para o nıvel um antes da variavel Liga ctrl2.
Isso ocorre para que o sistema de controle de tensao no elo CC seja ativado antes do
sistema de controle de velocidade, estabilizando nıvel de tensao no elo previamente
em relacao a partida da maquina.
O erro do componente de corrente no eixo direto passa por um controlador PI,
cuja saıda fornece o componente de tensao no eixo direto para a referencia do PWM.
De forma semelhante a malha de controle no lado da maquina, os componentes D e
Q sao convertidos para as coordenadas ABC e utilizados como referencia no PWM
senoidal.
Os ganhos dos controladores PI foram retirados de [9].
67