Embed Size (px)
Citation preview

UNIVERSITATEA TEHNICĂ “GHEORGHE ASACHI” DIN IAŞI
CONTRIBUŢII LA DEZVOLTAREA UNOR ELEMENTE DE CIRCUIT CONTROLATE ELECTRIC
-REZUMATUL TEZEI DE DOCTORAT- Gabriel Bonteanu Conducător de doctorat :prof. dr. ing. Liviu Goraş
IAŞI, 2018


CONTRIBUŢII LA DEZVOLTAREA UNOR ELEMENTE DE CIRCUIT CONTROLATE ELECTRIC
Gabriel Bonteanu Domeniul Inginerie electronică şi telecomunicaţii
Președinte comisie doctorat: prof. dr. ing. Daniela Tarniceriu Conducător de doctorat: prof. dr. ing. Liviu Goraş Referenți oficiali: prof. dr. ing. Gheorghe Brezeanu conf. dr. ing. Marius Neag prof. dr. ing. Ion Bogdan

Mulţumiri
Îi mulţumesc Domnului Profesor Dr. Ing. Liviu Goraş pentru îndrumarea de un înalt
profesionalism, răbdarea şi sprijinul acordat în elaborarea tezei de doctorat.
Le mulţumesc colegilor de birou Arcadie, Alexandru, Ştefan şi Ioan pentru discuţiile
constructive şi sfaturile valoroase.
Le mulţumesc cadrelor didactice din Facultatea de Electronică, Telecomunicaţii şi
Tehnologia Informaţiei Iaşi pentru contribuţiile aduse în formarea mea profesională.
Cu aleasă consideraţie le mulţumesc referenţilor ştiinţifici care au acceptat să analizeze
această teză şi să participe la sustinerea publică a acesteia.
Îi mulţumesc familiei mele pentru îngăduinţa arătată.


i
Cuprins
1. Elemente controlate şi aplicaţii ale lor în filtrele analogice 1
1.1 Elemente active. Elemente controlate 1
1.2 Tendinţe în proiectarea filtrelor analogice 2
1.3 Abordări în proiectarea filtrelor ajustabile în domenii largi 3
1.4 Amplificatorul transconductanţă 4
1.5 Solutii de implementare a transconductorilor ajustabili 5
1.5.1 Clasificarea metodelor de control ale transconductanţei 5
1.5.2 Realizarea amplificatoarelor transconductanţă ajustabile prin controlul curentului de
polarizare 5
1.5.3 Realizarea amplificatoarelor transconductanţă ajustabile prin controlul curentului de
polarizare şi ridicare la pătrat 6
1.5.4 Realizarea amplificatoarelor transconductanţă ajustabile prin controlul degenerării
unui etaj diferenţial utilizând tranzistori în regiunea liniară 6
1.5.5 Realizarea amplificatoarelor transconductanţă ajustabile prin modificarea continuă a
rezistenţei de degenerare utilizând comutatoare implementate cu tranzistoare în regim de
rezistor comandat 7
1.5.6 Realizarea amplificatoarelor transconductanţă ajustabile prin modificarea continuă a
unei rezistenţe active de degenerare de liniaritate ridicată 8
1.5.7 Realizarea amplificatoarelor transconductanţă ajustabile prin modificarea continuă
într-un etaj preudo-diferenţial 8
1.5.8 Realizarea amplificatoarelor transconductanţă ajustabile prin utilizarea oglinzilor de
curent cu câştig controlat electric 9
1.5.9 Realizarea controlului transconductanţei prin acţiunea unei bucle de reacţie negativă
cu tranzistori de intrare în regiunea liniară 9
1.5.10 Realizarea controlului transconductanţei prin acţiunea unei bucle de reacţie negativă
cu tranzistori de intrare în saturaţie 10
1.6 Soluţii pentru ajustarea capacităţii în circuitele integrate 11
1.6.1 Clase de multiplicatoare de capacitate 11
1.6.2 Implementare tipică a multiplicatorului cu mod de lucru în curent 11
1.6.3 Implementare tipică a multiplicatorului cu mod de lucru în tensiune 12
1.6.4 Multiplicator de capacitate ce combină modurile de lucru în tensiune şi în current 13
1.6.5 Multiplicator de capacitate bazat pe oglinzile de curent cu câştig controlat electric 13
1.6.6 Multiplicator de capacitate bazat pe CCII- şi COA 14
1.6.7 Multiplicator de capacitate bazat pe conveiorul diferenţial de diferenţe de curenţi
controlat în curent (CCDDCC) 14
1.6.8 Soluţie de scalare a capacităţii bazată pe amplificatoare transconductanţă 15
1.6.9 Realizare a unui multiplicator de capacitate bazată pe conversia tensiune-curent cu
un repetor în tensiune de înaltă performanţă 15
ii
2. Utilizarea transconductorilor în implementarea filtrelor Gm-C 16
2.1 Implementarea rezistoarelor cu un terminal la masă 16
2.2 Implementarea rezistoarelor flotante 16
2.3 Implementarea integratorului fără pierderi 17
2.4 Implementarea integratorului cu pierderi 17
2.5 Implementarea funcţiei de amplificare în tensiune 17
2.6 Implementarea funcţiei de sumare algebrică ponderată a tensiunilor 18
2.7 Implementarea inversorului de impedanţă pozitiv (giratorul) 18
2.8 Implementarea bobinei cu un terminal la masa fără pierderi cu ajutorul OTA 19
2.9 Implementarea bobinei flotante fără pierderi cu ajutorul OTA 19
2.10 Analiza bobinei flotante girator-C cu pierderi 21
2.11 Implementarea filtrelor pasive prin simularea elementelor 22
2.12 Implementarea unei secţiuni de ordinul I cu ajutorul OTA 23
2.13 Implementarea unui biquad trece jos cu ajutorul OTA 24
2.14 Implementarea unui biquad trece bandă cu ajutorul OTA 24
2.15 Implementarea unui biquad trece sus cu ajutorul OTA 24
2.16 Implementarea filtrelor de ordin ridicat printr-o cascadă de secţiuni 25
3. Contribuţii la dezvoltarea elementelor de circuit controlate electric 26
3.1 Soluţie de circuit pentru ajustarea transconductanţei prin curentul de polarizare 26
3.1.1 Programabilitate şi controlabilitate în oglinzile de curent 27
3.1.2 Pincipiul de bază al structurii propuse 27
3.1.3 Soluţia de oglindă programabilă propusă 29
3.1.4 Studiul stabilităţii sistemului propus 30
3.1.5 Implementare şi rezultate 31
3.2 Soluţie de circuit pentru ajustarea transconductanţei prin utilizarea unei oglinzi de
curent cu câştig controlat electric 31
3.2.1 Pincipiul de bază 31
3.2.2 Transconductorul ajustabil propus 32
3.2.3 Analiza în frecvenţă a transconductorului propus 33
3.2.4 Analiza de neliniaritate a transconductorului propus 34
3.2.5 Analiza de zgomot a transconductorului propus 34
3.2.6 Implementare şi rezultate 35
3.3 A doua soluţie de circuit pentru ajustarea transconductanţei prin utilizarea unei oglinzi
de curent cu câştig controlat electric 36
3.3.1 A doua soluţie de amplificator cu transconductanţă ajustabilă 36
3.3.2 Analiza în frecvenţă a transconductorului 37
3.3.3 Analiza de neliniaritate a transconductorului 38
3.3.4 Analiza de zgomot a transconductorului 38
3.3.5 Implementarea şi rezultatele simulărilor transconductorului 39
3.3.6 O comparaţie între cele două soluţii de transconductor 41
3.4 Soluţie de circuit pentru multiplicarea capacităţii utilizând amplificatoare
transconductanţă cu câştig ajustabil 41
3.4.1 Multiplicatorul de capacitate propus 41
3.4.2 Analiza în frecvenţă a multiplicatorului 43
3.4.3 Analiza în frecvenţă considerând şi efectele neideale la intrarea şi ieşirea
transconductorilor 45
3.4.4 Efectul transconductanţei 46
iii
3.4.5 Implementarea şi rezultatele simulărilor multiplicatorului 46
3.5 Soluţie de circuit pentru un amplificator de curent controlat în curent 47
3.5.1 Amplificatorul de curent propus 48
3.5.2 Implementarea şi rezultatele simulărilor 49
3.6 Soluţie de circuit pentru multiplicarea capacităţii utilizând un amplificator de curent
controlat în curent 50
3.6.1 Multiplicatorul de capacitate propus 50
3.6.2 Implementarea şi rezultatele simulărilor 52
3.7 Soluţie de circuit pentru conversia de la un condensator cu terminal la masă la unul
flotant 54
3.7.1 Circuitul propus 54
3.7.2 Implementarea şi rezultatele simulărilor 59
4. Aplicaţii ale elementelor de circuit controlate electric propuse în implementarea filtrelor
analogice 61
4.1 Filtru trece jos de ordin 5 implementat cu amplificatorul transconductanţă prezentat în
secţiunea 3.2 61
4.1.1 Proiectarea parametrilor filtrului 61
4.1.2 Implementarea şi rezultatele simulărilor 62
4.2 Filtru trece jos de ordin 5 implementat cu amplificatorul transconductanţă prezentat în
secţiunea 3.3 62
4.2.1 Proiectarea parametrilor filtrului 62
4.2.2 Analiza de zgomot a secţiunilor filtrului 63
4.2.3 Implementarea şi rezultatele simulărilor 65
4.3 Implementarea unui element inductiv controlat electric şi utilizarea acestuia într-un
filtru trece bandă de ordin 2 66
4.3.1 Implementarea unui elementului inductiv cu ajutorul amplificatorului
transconductanţă prezentat în secţiunea 3.2 67
4.3.2 Implementarea unui filtru trece bandă de ordin 2 69
4.3.3 Implementarea şi rezultatele simulărilor 70
4.4 Implementarea unui integrator ce utilizează o capacitate multiplicată după
metodologia prezentată în secţiunea 3.4 72
4.4.1 Implementarea integratorului Gm-C 72
4.4.2 Implementarea şi rezultatele simulărilor 73
4.5 Implementarea unui oscilator de relaxare ce utilizează o capacitate multiplicată după
metodologia prezentată în secţiunea 3.4 74
4.5.1 Implementarea unui amplificator transconductor cu transconductanţă ajustabilă într-
un mod eficient din punct de vedere al ariei şi consumului 74
4.5.2 Implementarea oscilatorului de relaxare 75
4.5.3 Rezultatele simulărilor 75
5. Concluzii 77
Listă de lucrări publicate 78
Bibliografie 79

iv
1
1. Elemente controlate şi aplicaţii ale lor în filtrele analogice
1.1 Elemente active. Elemente controlate
Spre deosebire de elementele pasive de circuit, elementele active au proprietatea de a conferi
structurilor ce le înglobează o funcţie de câştig, acestă caracteristică facându-le esenţiale în procesarea
semnalelor electrice. Acestea pot avea una sau mai multe porţi iar frecvenţa utilizării lor în aplicaţii este
bineînteles invers proporţională cu efortul de realizare.
Sinteza circuitelor se bazează pe existenţa unei ―biblioteci‖ de elemente active ideale din care fac
parte atât dispozitive cu o singură poartă cat şi diporţi şi respectiv triporţi. Implementarea acestora la nivel
de circuit se poate face utilizând, de regulă, cele două entităţi de bază ale proiectantului de circuite
analogice, amplificatorul operaţional respectiv amplificatorul operaţional transconductanţă.
Existenţa unui set complet de elemente active de circuit, cu performanţe ajustabile satisfăcătoare, va
permite îndeplinirea dezideratului ultim al dezvoltatorilor de circuite integrate, anume o sinteză automată
performantă nu doar pe latura numerică a circuitelor ci şi pe cea analogică.
În funcţie de numărul de porţi, întâlnim patru categorii distincte de elementele controlate electric:
- Elemente de circuit controlate electric de tip uniport;
- Elemente de circuit controlate electric cu două porţi (diport);
- Elemente de circuit controlate electric cu trei porţi (triport);
- Elemente de circuit controlate electric cu patru porţi (cuadriport);
Din punct de vedere al modului în care se realizează controlul, putem vorbi de două categorii de
elemente de circuit controlate electric:
- Elemente de circuit la care modul de control este „intrinsec‖;
- Elemente de circuit la care modul de control este „emulat;
După tipul mărimii de control, putem vorbi de elemente de circuit:
- Controlate în curent;
- Controlate în tensiune;
- Controlate hibrid;
- Controlabile şi în curent şi în tensiune;
Elementele de bază în modelarea elementelor de circuit controlate electric sunt sursele comandate.
Acestea sunt diporţi unidirecţionali la care mărimea electrică de ieşire, tensiune sau curent, este
proporţională cu mărimea electrică de intrare, tensiune sau curent, aşa cum arată Tabelul 1. Efortul de
cercetare corespunzător acestei teze a avut ca rezultat elaborarea de structuri de circuit ce corespund unor
surse de curent comandate în curent sau în tensiune la care factorul de câştig sau este controlat la
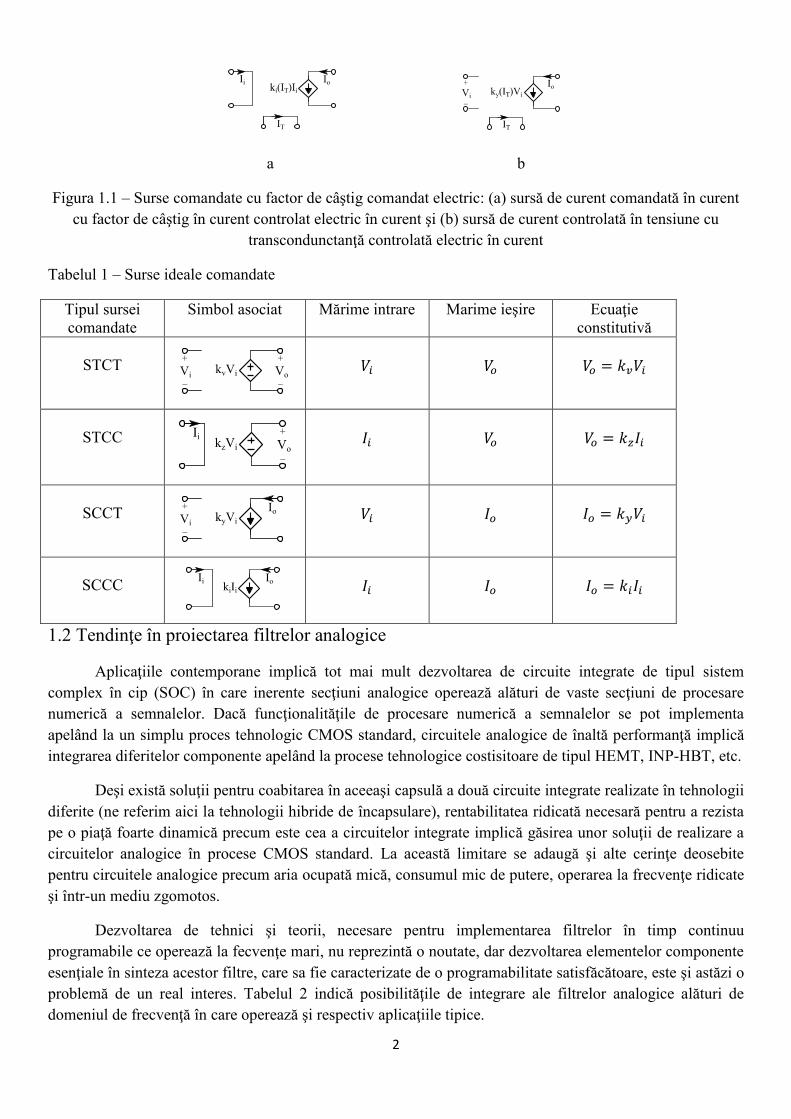
rândul lui de o mărime electrică aplicată la portul de control, aşa cum se indică în Figura 1.1.
2
a b
Figura 1.1 – Surse comandate cu factor de câştig comandat electric: (a) sursă de curent comandată în curent
cu factor de câştig în curent controlat electric în curent şi (b) sursă de curent controlată în tensiune cu
transcondunctanţă controlată electric în curent
Tabelul 1 – Surse ideale comandate
Tipul sursei
comandate
Simbol asociat Mărime intrare Marime ieşire Ecuaţie
constitutivă
STCT
STCC
SCCT
SCCC
1.2 Tendinţe în proiectarea filtrelor analogice
Aplicaţiile contemporane implică tot mai mult dezvoltarea de circuite integrate de tipul sistem
complex în cip (SOC) în care inerente secţiuni analogice operează alături de vaste secţiuni de procesare
numerică a semnalelor. Dacă funcţionalităţile de procesare numerică a semnalelor se pot implementa
apelând la un simplu proces tehnologic CMOS standard, circuitele analogice de înaltă performanţă implică
integrarea diferitelor componente apelând la procese tehnologice costisitoare de tipul HEMT, INP-HBT, etc.
Deşi există soluţii pentru coabitarea în aceeaşi capsulă a două circuite integrate realizate în tehnologii
diferite (ne referim aici la tehnologii hibride de încapsulare), rentabilitatea ridicată necesară pentru a rezista
pe o piaţă foarte dinamică precum este cea a circuitelor integrate implică găsirea unor soluţii de realizare a
circuitelor analogice în procese CMOS standard. La această limitare se adaugă şi alte cerinţe deosebite
pentru circuitele analogice precum aria ocupată mică, consumul mic de putere, operarea la frecvenţe ridicate
şi într-un mediu zgomotos.
Dezvoltarea de tehnici şi teorii, necesare pentru implementarea filtrelor în timp continuu
programabile ce operează la fecvenţe mari, nu reprezintă o noutate, dar dezvoltarea elementelor componente
esenţiale în sinteza acestor filtre, care sa fie caracterizate de o programabilitate satisfăcătoare, este şi astăzi o
problemă de un real interes. Tabelul 2 indică posibilităţile de integrare ale filtrelor analogice alături de
domeniul de frecvenţă în care operează şi respectiv aplicaţiile tipice.

3
Tabelul 2- Aplicaţii ale filtrelor analogice
Implementarea filtrului analogic Domeniul de frecvenţă Aplicaţie tipică
Capacităţi comutate 1Hz-10MHz
Gm-C 1MHz-100MHz HDD
L-C 100MHz-10GHz RF
La criteriile enunţate mai sus, filtrele OPAMP-RC ( date fiind limitările în frecvenţă ale
amplificatorului operaţional, filtrele realizate cu acesta fiind limitate la sute de kHz) şi cele cu capacităţi
comutate nu se califică, ramânând ca elementele de bază în sinteza filtrelor să fie transconductorul şi
condensatorul, aşa cum s-a prezis încă din 1990 în [2].
Orice funcţie de transfer poate fi sintetizată în tehnica Gm-C. Datorită usurinţei de proiectare şi
control, metoda de cascadare este preferată în sinteza filtrelor de ordin ridicat [3]. Această metodă presupune
mai întâi factorizarea funcţiei de transfer în funcţii de ordin 1 şi 2, după care aceste funcţii de ordin mic se
vor implementa cu structuri ce utilizează un număr cât mai mic de instanţe ale amplificatorului
transconductanţă. Bineînteles, sistemul dorit se obţine prin cascadarea structurilor corespunzătoare funcţiilor
de ordin coborât.
1.3 Abordări în proiectarea filtrelor ajustabile în domenii largi
Se cunoaşte faptul că plasarea polilor unui filtru Gm-C în planul va depinde de parametrii şi .
Ca urmare sunt posibile două abordări în implementarea ajustabilităţii în acest tip de filtre [4]:Gm-constant,
când se menţine transconductanţa Gm la o valoare constantă şi se ajustează valoarea capacităţii C, şi C-
constant, când se menţine capacitatea C la o valoare constantă şi se ajustează valoarea transconductanţei Gm;
Considerând un integrator Gm-C care trebuie proiectat astfel încât frecvenţa de câştig unitar
să poată fi ajustată într-o gama , este de aşteptat ca cele două abordări enunţate anterior să aibă
consecinţe directe asupra unor parametri de interes precum zgomotul la ieşire, puterea disipată sau aria
ocupată de circuit. Legatura între valoarea acestor parametri şi frecevenţa de câştig unitar este indicată în
Figura 1.2. Prezentul studiu îşi propune să ofere soluţii pentru cele două abordări: metode de a obţine o
transconductanţă ajustabilă într-un domeniu cât mai larg şi respectiv metode pentru a obţine capacităţi
ajustabile într-o plajă cât mai largă.
Figura 1.2 – Variaţia parametrilor de interes (valoarea medie patratică a tensiunii de zgomot la ieşire,
puterea disipată şi aria ocupată de circuitul utilizat) odată cu frecvenţa de câştig unitar în cazul unui
integrator Gm-C

4
1.4 Amplificatorul transconductanţă
Putem enumera câteva avantaje ale realizării filtrelor active cu tehnici Gm-C:
- Dacă tipul de filtru necesită existenţa unui resistor, acesta poate fi implementat ca rezistenţă
echivalentă a unei structuri ce conţine unul sau mai multe transconductoare.
- Filtrele Gm-C, dar şi cele cu capacităţi comutate, pot fi gândite astfel încat parametrii de interes să
depindă de un raport între capacităţi, aceste rapoarte putând fi controlate precis.
- Circuitele Gm-C pot fi proiectate pentru funcţionarea la zeci-sute MHz.
- Parametrii de interes ai unui filtru Gm-C pot fi controlaţi prin simpla ajustare a curentului de
polarizare (cel mai comun).
Un amplificator transconductanţă (OTA) ideal este o sursă ideală de curent controlată diferenţial în
tensiune, având aşadar impedanţe de intrare şi ieşire infinite. Este de remarcat aici similitudinea între un
OTA ideal şi un transistor MOS-FET idealizat.
Funcţionarea amplificatorului ideal transconductanţă este descrisă de relaţia urmatoare:
Figura 1.3 – Amplificator transconductanţă ideal: simbol şi schemă echivalentă
Dacă însă se ţine seama şi de efectele neideale datorate impedanţelor de intrare şi de ieşire, modelul
echivalent al transconductorului va fi:
Figura 1.4 – Schema echivalentă a transconductorului ce ţine seama de impedanţele de intrare şi ieşire
neideale
Versatilitatea OTA ca şi element activ de circuit este indiscutabilă, simplicitatea implementării şi
facila ajustabilitate a transconductanţei contribuind din plin la aceasta. Există însa şi unele limitări de care
trebuie să se ţină seama atunci când se decide o implementare Gm-C [5,6]. Un prim dezavantaj, ce trebuie
menţionat, ţine de gama dinamică a intrării, redusă la cateva zeci de mV, pentru care se asigură o liniaritate
ridicată. Această problemă poate fi depaşită fie prin degenerarea etajului de intrare fie prin utilizarea de
divizoare rezistive, a doua soluţie alterând însă rezistenţa echivalentă de intrare. În lista abaterilor importante
de la modelul ideal, pe lângă impedanţele de intrare/ieşire, se adaugă şi dependenţa transconductanţei de
5
frecvenţă, ce poate fi modelată cel mai simplu printr-un sistem cu un singur pol, aşa cum arată următoarea
relaţie:
unde este transconductanţa în joasă frecvenţă iar pulsaţia de tăiere a amplificatorului
transconductanţă.
1.5 Soluţii pentru implementarea transconductorilor ajustabili
1.5.1 Clasificarea metodelor de control ale transconductanţei
În continuare vor fi trecute în revistă câteva metode ce permit obţinerea trasconductorilor ajustabili.
- Metode de control în buclă deschisă
o Controlul prin curentul de polarizare;
Cu radicalul curentului de polarizare [7]
Liniar dependent de curentul de polarizare [8]
o Controlul prin rezistenţa de degenerare;
Degenerare cu triodă, [9];
Degenerare cu tranzistor cu grilă cvasi flotantă, [10];
Degenerare pasivă şi triodă soft-switched, [11];
o Cu etaj pseudo-diferenţial, [12];
o Controlul prin oglinzi de curent cu câştig controlat electric, [13];
- Metode de control ce rezultă din acţiunea unei bucle de reacţie negativă;
o Cu tranzistor de intrare polarizat în regiunea liniară, [14];
o Cu tranzistor de intrare polarizat în saturaţie, [15];
1.5.2 Realizarea amplificatoarelor transconductanţă ajustabile prin controlul curentului de polarizare
Modalitatea naturală de control al transconductanţei unui transconductor implementat cu tranzistori
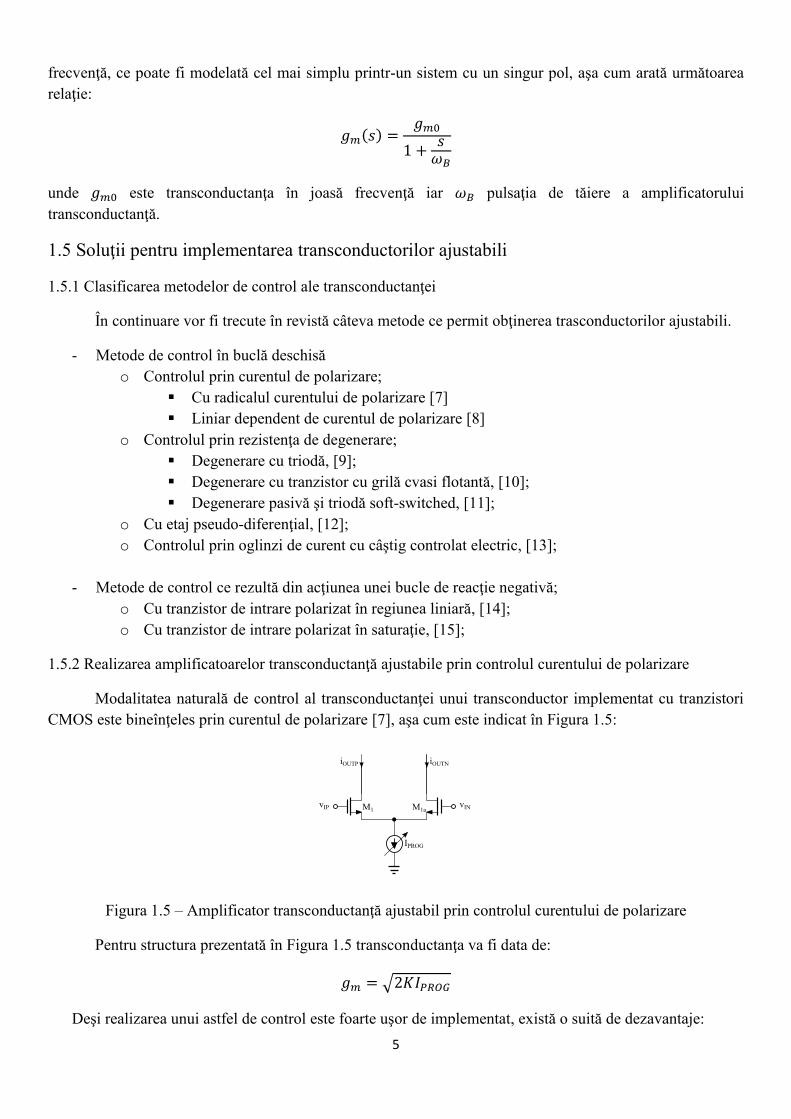
CMOS este bineînţeles prin curentul de polarizare [7], aşa cum este indicat în Figura 1.5:
Figura 1.5 – Amplificator transconductanţă ajustabil prin controlul curentului de polarizare
Pentru structura prezentată în Figura 1.5 transconductanţa va fi data de:
√
Deşi realizarea unui astfel de control este foarte uşor de implementat, există o suită de dezavantaje:

6
dată fiind dependenţa transconductanţei de radicalul curentului de control, pentru o gamă dorită de reglaj,
curentul de control trebuie variat într-o gamă pătratic extinsă; diversi parametri de interes ai
transconductorului vor fi afectaţi de modificarea curentului de polarizare, cum ar fi gama dinamică la
intrare, gama dinamică la ieşire, rezistenţa de ieşire, etc.
1.5.3 Realizarea amplificatoarelor transconductanţă ajustabile prin controlul curentului de polarizare şi
ridicare la pătrat
Eliminarea dezavantajului gamei pătratic extinsă a curentului de control işi propune spre rezolvare
autorul structurii prezentate în [8] printr-un procedeu de ridicare la pătrat a transconductanţei, cu scopul de a
obţine un transconductor liniar ajustabil, aşa cum indică Figura 1.6.
Figura 1.6 – Implementarea transconductanţei liniar dependente de curentul de polarizare
Transconductanţa pe întreaga structură va fi:
Ultima relaţie indică în mod clar faptul că transconductorul prezentat poate fi ajustat electric liniar
prin curentul de polarizare . Implementarea structurii din [8] a permis ajustarea transconductanţei într-o
gamă de 3 decade în condiţiile variaţiei curentului de polarizare într-o gamă de 5 decade.
1.5.4 Realizarea amplificatoarelor transconductanţă ajustabile prin controlul degenerării unui etaj diferenţial
utilizând tranzistori în regiunea liniară
Controlul transconductanţei prin ajustarea gradului de degenerare al unui etaj diferenţial de intrare,
utilizând tranzistori MOS polarizaţi în regiunea liniară pe post de rezistori de degenerare, a fost propusă
pentru prima dată în [9], în forma arătată de Figura 1.7.
Figura 1.7 – Implementarea amplificatoarelor transconductanţă ajustabile prin controlul degenerării unui etaj
diferenţial utilizând tranzistori în regiunea liniară
7
Curentul de ieşire va fi dat de :
unde şi este o funcţie neliniară independentă de control.
Acestă soluţie oferă o gamă suficientă de control pentru a compensa variaţiile de proces tehnologic şi
cele cu temperatura, permiţând totodată procesarea semnalelor de amplitudini mari.
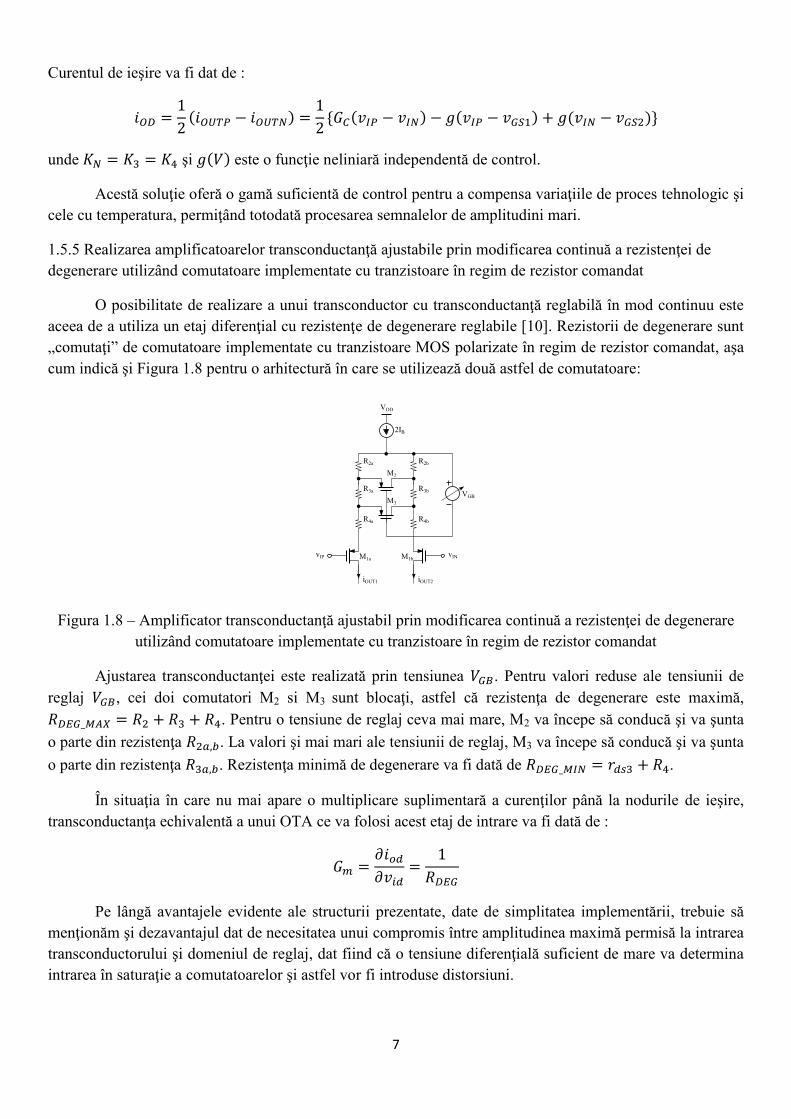
1.5.5 Realizarea amplificatoarelor transconductanţă ajustabile prin modificarea continuă a rezistenţei de
degenerare utilizând comutatoare implementate cu tranzistoare în regim de rezistor comandat
O posibilitate de realizare a unui transconductor cu transconductanţă reglabilă în mod continuu este
aceea de a utiliza un etaj diferenţial cu rezistenţe de degenerare reglabile [10]. Rezistorii de degenerare sunt
„comutaţi‖ de comutatoare implementate cu tranzistoare MOS polarizate în regim de rezistor comandat, aşa
cum indică şi Figura 1.8 pentru o arhitectură în care se utilizează două astfel de comutatoare:
Figura 1.8 – Amplificator transconductanţă ajustabil prin modificarea continuă a rezistenţei de degenerare
utilizând comutatoare implementate cu tranzistoare în regim de rezistor comandat
Ajustarea transconductanţei este realizată prin tensiunea . Pentru valori reduse ale tensiunii de
reglaj , cei doi comutatori M2 si M3 sunt blocaţi, astfel că rezistenţa de degenerare este maximă,
. Pentru o tensiune de reglaj ceva mai mare, M2 va începe să conducă şi va şunta
o parte din rezistenţa . La valori şi mai mari ale tensiunii de reglaj, M3 va începe să conducă şi va şunta
o parte din rezistenţa . Rezistenţa minimă de degenerare va fi dată de .
În situaţia în care nu mai apare o multiplicare suplimentară a curenţilor până la nodurile de ieşire,
transconductanţa echivalentă a unui OTA ce va folosi acest etaj de intrare va fi dată de :
Pe lângă avantajele evidente ale structurii prezentate, date de simplitatea implementării, trebuie să
menţionăm şi dezavantajul dat de necesitatea unui compromis între amplitudinea maximă permisă la intrarea
transconductorului şi domeniul de reglaj, dat fiind că o tensiune diferenţială suficient de mare va determina
intrarea în saturaţie a comutatoarelor şi astfel vor fi introduse distorsiuni.

8
1.5.6 Realizarea amplificatoarelor transconductanţă ajustabile prin modificarea continuă a unei rezistenţe
active de degenerare, de liniaritate ridicată
O altă posibilitate de realizare a ajustabilităţii în transconductori, ce se bazează tot pe principiul
degenerării etajului de intrare, este aceea de a folosi pe post de rezistor de degenerare un tranzistor cu poartă
cvasi-flotantă (QFG), aşa cum arata Figura 1.9. Utilizând tranzistori QFG se poate obţine o liniaritate a
transconductorului comparabilă cu cea rezultată în urma utilizării unui rezistor de degenerare pasiv[11].
Figura 1.9 – Rezistenţă activă de degenerare implementată cu tranzistor QFG
Structura de degenerare este construită cu tranzistoare operând în regiunea triodă, a căror rezistenţă
echivalentă este ajustată prin tensiunea aplicată în grilă, . Diferenţa esenţială faţă de situaţia cand s-ar
fi folosit simple tranzistoare în triodă este dată de faptul că tensiunea de control este aplicată prin
intermediul unor rezistoare de valoare mare, , aşa că potenţialul grilei poate sa varieze. În acest mod
componentele de AC ale tensiunilor de drenă şi sursă sunt aplicate grilei prin intermediul divizorului
capacitiv, ceea ce determină anularea termenului neliniar dependent de din expresia curentului de drenă
al tranzistorului ce funcţionează în regiunea de triodă.
[
]
1.5.7 Realizarea amplificatoarelor transconductanţă ajustabile prin modificarea continuă într-un etaj pseudo-
diferenţial
În [12] este propusă o astfel de soluţie, aşa cum indică şi Figura 1.10.
Figura 1.10 – Controlul transconductanţei într-un etaj pseudo-diferenţial
Fiecare tranzitor din etajul preudo-diferenţial este alcătuit din două tranzistoare împerecheate,
şi . Semnalele de intrare se aplică tranzistorilor şi care acţionează ca
repetori pe sursă îmbunătăţiţi, graţie buclelor de reacţie negativă realizate cu şi . Se ajunge astfel la
un curent de ieşire diferenţial dat de:
9
unde este tensiunea de prag a tranzistorilor iar
(
)
.
Structura prezentată are aşadar posibilitatea de a menţine tensiunea de intrare de mod comun
constantă atunci când transconductanţa este controlată din . Metoda prezentată nu permite însă decât o
gamă de reglaj de 1:2 a transconductanţei în condiţiile unei bune liniarităţi.
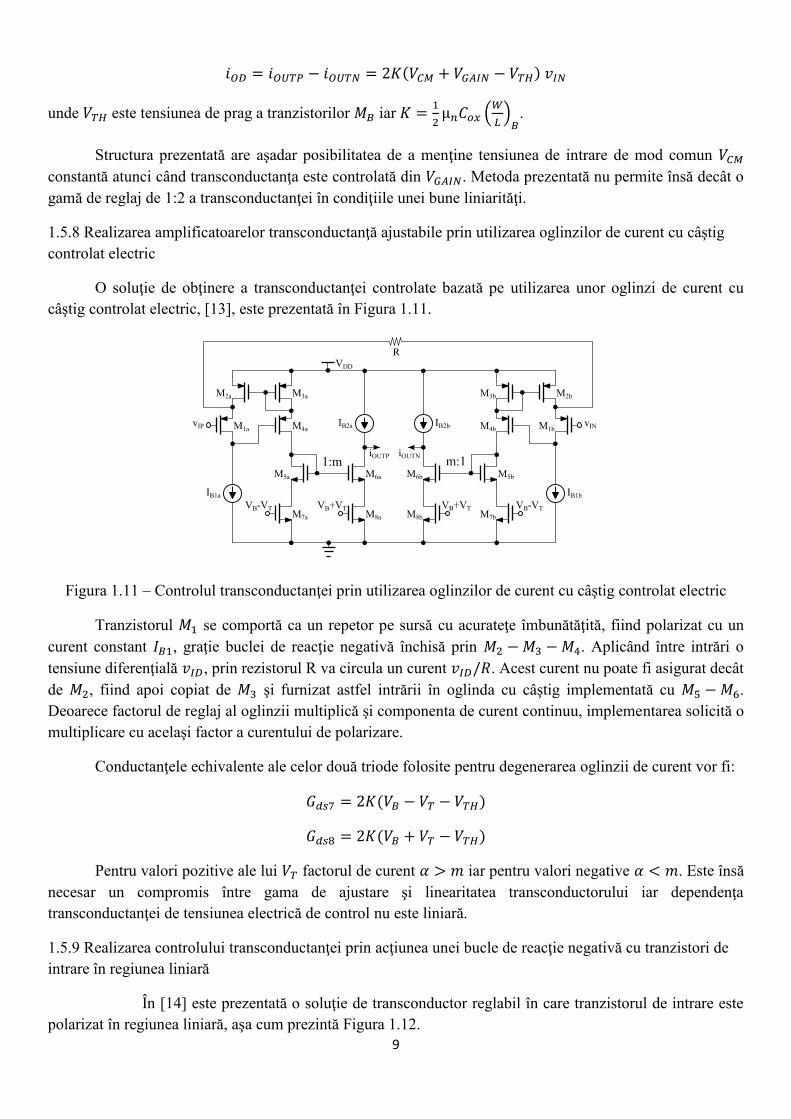
1.5.8 Realizarea amplificatoarelor transconductanţă ajustabile prin utilizarea oglinzilor de curent cu câştig
controlat electric
O soluţie de obţinere a transconductanţei controlate bazată pe utilizarea unor oglinzi de curent cu
câştig controlat electric, [13], este prezentată în Figura 1.11.
Figura 1.11 – Controlul transconductanţei prin utilizarea oglinzilor de curent cu câştig controlat electric
Tranzistorul se comportă ca un repetor pe sursă cu acurateţe îmbunătăţită, fiind polarizat cu un
curent constant , graţie buclei de reacţie negativă închisă prin . Aplicând între intrări o
tensiune diferenţială , prin rezistorul R va circula un curent . Acest curent nu poate fi asigurat decât
de , fiind apoi copiat de şi furnizat astfel intrării în oglinda cu câştig implementată cu .
Deoarece factorul de reglaj al oglinzii multiplică şi componenta de curent continuu, implementarea solicită o
multiplicare cu acelaşi factor a curentului de polarizare.
Conductanţele echivalente ale celor două triode folosite pentru degenerarea oglinzii de curent vor fi:
Pentru valori pozitive ale lui factorul de curent iar pentru valori negative . Este însă
necesar un compromis între gama de ajustare şi linearitatea transconductorului iar dependenţa
transconductanţei de tensiunea electrică de control nu este liniară.
1.5.9 Realizarea controlului transconductanţei prin acţiunea unei bucle de reacţie negativă cu tranzistori de
intrare în regiunea liniară
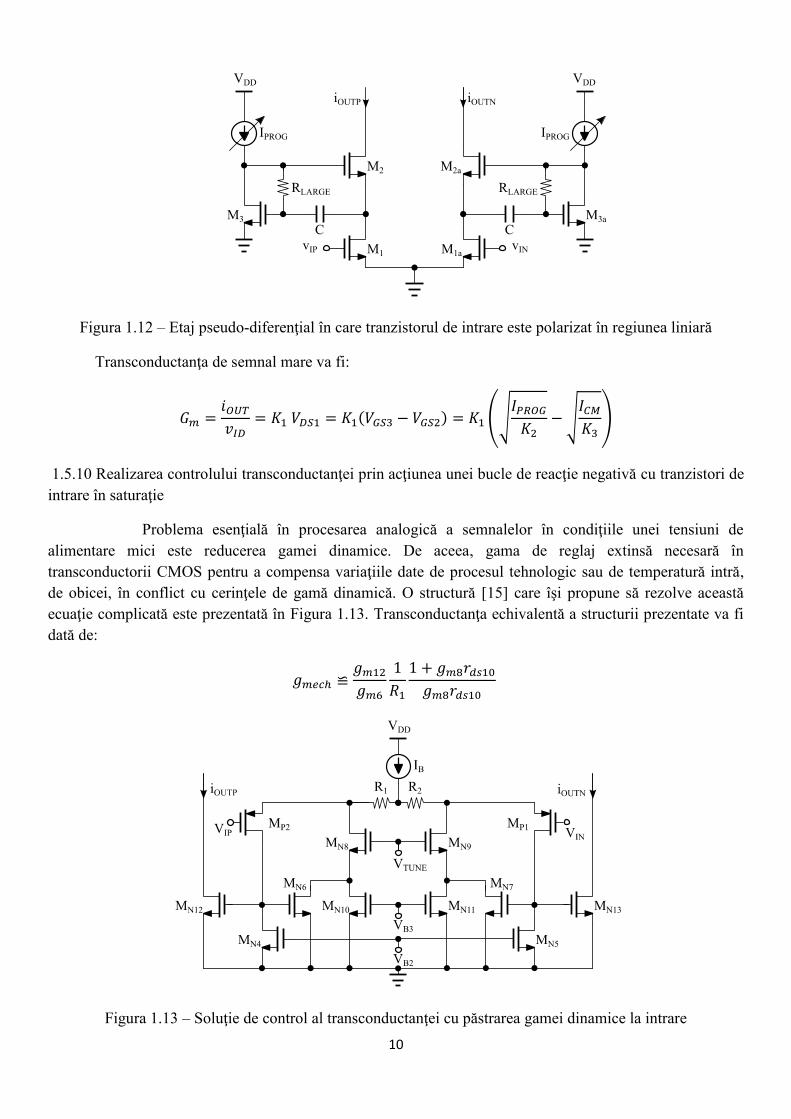
În [14] este prezentată o soluţie de transconductor reglabil în care tranzistorul de intrare este
polarizat în regiunea liniară, aşa cum prezintă Figura 1.12.
10
Figura 1.12 – Etaj pseudo-diferenţial în care tranzistorul de intrare este polarizat în regiunea liniară
Transconductanţa de semnal mare va fi:
(√
√
)
1.5.10 Realizarea controlului transconductanţei prin acţiunea unei bucle de reacţie negativă cu tranzistori de
intrare în saturaţie
Problema esenţială în procesarea analogică a semnalelor în condiţiile unei tensiuni de
alimentare mici este reducerea gamei dinamice. De aceea, gama de reglaj extinsă necesară în
transconductorii CMOS pentru a compensa variaţiile date de procesul tehnologic sau de temperatură intră,
de obicei, în conflict cu cerinţele de gamă dinamică. O structură [15] care îşi propune să rezolve această
ecuaţie complicată este prezentată în Figura 1.13. Transconductanţa echivalentă a structurii prezentate va fi
dată de:
Figura 1.13 – Soluţie de control al transconductanţei cu păstrarea gamei dinamice la intrare
11
1.6 Soluţii pentru ajustarea capacităţii în circuitele integrate
1.6.1 Clase de multiplicatoare de capacitate
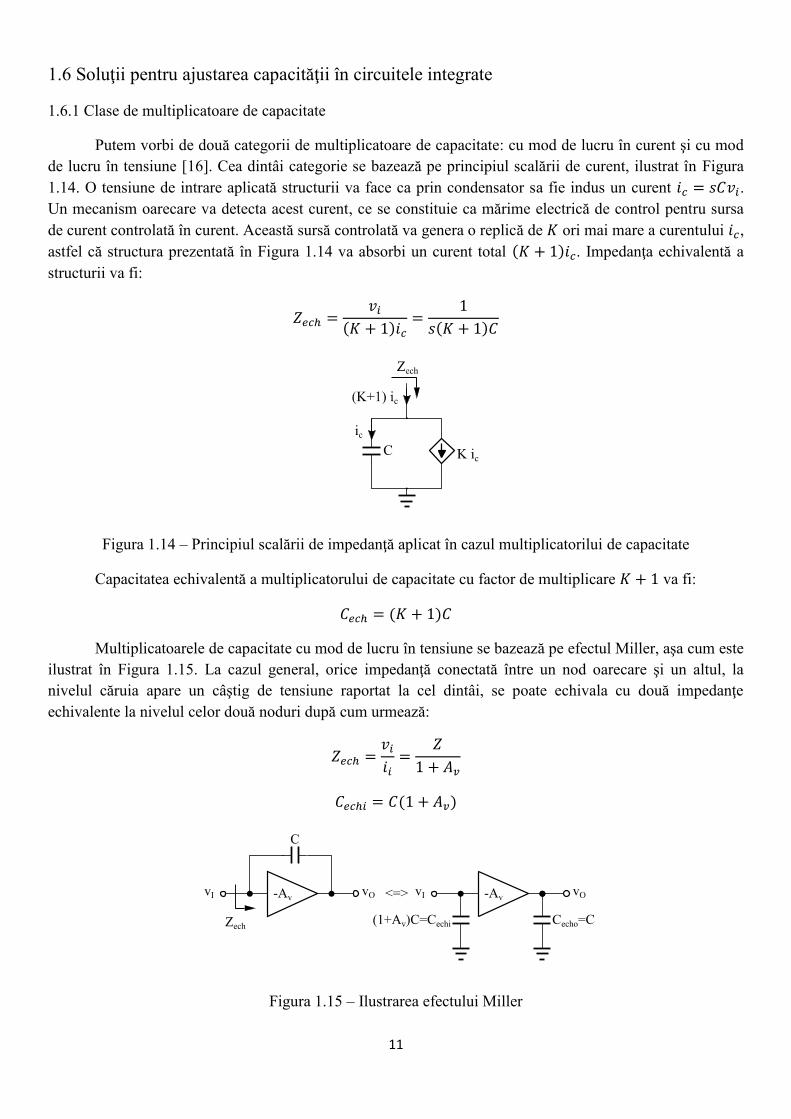
Putem vorbi de două categorii de multiplicatoare de capacitate: cu mod de lucru în curent şi cu mod
de lucru în tensiune [16]. Cea dintâi categorie se bazează pe principiul scalării de curent, ilustrat în Figura
1.14. O tensiune de intrare aplicată structurii va face ca prin condensator sa fie indus un curent .
Un mecanism oarecare va detecta acest curent, ce se constituie ca mărime electrică de control pentru sursa
de curent controlată în curent. Această sursă controlată va genera o replică de ori mai mare a curentului ,
astfel că structura prezentată în Figura 1.14 va absorbi un curent total . Impedanţa echivalentă a
structurii va fi:
Figura 1.14 – Principiul scalării de impedanţă aplicat în cazul multiplicatorilui de capacitate
Capacitatea echivalentă a multiplicatorului de capacitate cu factor de multiplicare va fi:
Multiplicatoarele de capacitate cu mod de lucru în tensiune se bazează pe efectul Miller, aşa cum este
ilustrat în Figura 1.15. La cazul general, orice impedanţă conectată între un nod oarecare şi un altul, la
nivelul căruia apare un câştig de tensiune raportat la cel dintâi, se poate echivala cu două impedanţe
echivalente la nivelul celor două noduri după cum urmează:
Figura 1.15 – Ilustrarea efectului Miller

12
1.6.2 Implementare tipică a multiplicatorului cu mod de lucru în curent
Cea mai simplă implementare posibilă pentru multiplicatorul de capacitate bazat pe scalorul de
curent este ilustrată în Figura 1.16, [16].
Figura 1.16 – Simplă implementare a multiplicatorului de capacitate bazat pe scalarea de curent
Funcţionarea circuitului este urmatoarea: curentul prin condensator se închide prin tranzistorul
conectat ca şi diodă , care este cap de oglindă în structura . Capacitatea echivalentă la intrarea
circuitului din Figura 1.16 va fi:
Deşi structura prezentată in Figura 1.16 are marele avantaj al implementării „naturale‖ a sursei de
curent controlate în curent prin oglinda realizată cu cele fingere are tranzistorului n-MOS, există însă
o serie de dezavantaje ce trebuie luate în calcul.
1.6.3 Implementare tipică a multiplicatorului cu mod de lucru în tensiune
În Figura 1.17 este ilustrat un integrator Gm-C ca exemplu de implementare practică a unui
multiplicator de capacitate cu mod de lucru în tensiune [17].
Figura 1.17 – Implementare tipică a multiplicatorului bazat pe efectul Miller
Capacitatea echivalentă la ieşirea primului transconductor va fi:
unde este câştigul la joasă frecvenţă al amplificatorului implementat cu cel de-al doilea
transconductor iar este rezistenţa de ieşire a acestuia.

13
Avantejele implementărilor de forma celor din Figura 1.17 ţin de posibilitatea realizării de
amplificatoare transconductanţă care să aibă un câştig în tensiune foarte mare, graţie rezistenţei de ieşire
de valoare mare, aceasta conducând la obţinerea unor factori de multiplicare de valoare mare. Structura
prezintă însă şi unele dezavantaje.
1.6.4 Multiplicator de capacitate ce combină modurile de lucru în tensiune şi în curent
În [17] este prezentat un mod de îmbunătăţire a factorului de multiplicare dat de câştigul în tensiune
cu o multiplicare dată de modul de lucru în curent. O astfel de configuraţie de circuit este ilustrată în Figura
1.18.
Figura 1.18 – Îmbinarea modurilor de lucru în curent şi în tensiune
Capacitatea echivalentă în nodul nu este multiplicată doar de efectul Miller, , ci şi de
multiplicatorul cu mod de lucru în curent. Diferenţa faţa de o multiplicare Miller tipică este dată de faptul că
elementul capacitiv de bază nu mai este conectat direct la intrarea etajului implementat cu ci, curentul
prin acesta este detectat, multiplicat cu ajutorul oglinzilor de curent şi apoi aplicat nodului prin sursa de
curent controlată în curent. În consecinţă capacitatea echivalentă în nodul va fi:
1.6.5 Multiplicatorul de capacitate bazat pe oglinzile de curent cu câştig controlat electric
În [18] este prezentat un circuit capabil să multiplice valoarea unei capacităţi referite faţă de masă,
valoarea factorului de multiplicare, obţinut prin câştigul controlat electric al oglinzilor, fiind limitat doar de
raţiuni de arie şi putere disipată.
Figura 1.19 – Multiplicator de capacitate cu mod de lucru în curent bazat pe oglinzile de curent cu câştig
controlat electric

14
Capacitatea echivalentă la intrarea circuitului din Figura 1.20, pentru , va fi:
1.6.6 Multiplicator de capacitate bazat pe conveiorul de curent (CCII-) şi pe amplificatorul de curent (COA)
Utilizând un conveior de curent de generaţia a doua şi respectiv un amplificator de curent, în [19]
este prezentat un multiplicator de capacitate cu mod de lucru în curent capabil sa ofere factori de amplificare
de până la 100. Structura implementată pentru multiplicarea capacităţii electrice este ilustrată în Figura 1.19:
Figura 1.20 – Multiplicator de capacitate bazat pe CCII- şi COA
Dacă vom ţine seama de efecte neideale precum rezistenţele de ieşire ale porturilor X şi op, şi
, sau de neidealitatea transferurilor specifice conveiorului, şi , impedanţa de intrare
în structură devine:
[
(
*]
1.6.7 Multiplicatorul de capacitate bazat pe conveiorul diferenţial de diferenţe de curenţi controlat în curent
(CCDDCC)
Un multiplicator de capacitate flotantă ce utilizează trei conveioare diferenţiale de diferenţe de
curenţi controlate în curent este prezentat în [20].
Multiplicatorul bazat pe CCDDCC utilizează trei instanţe ale conveiorului şi un condensator cu un
terminal la masă, aşa cum este indicat în Figura 1.22.
Figura 1.22 – Multiplicator de capacitate construit cu CCDDCC
15
Capacitatea echivalentă la intrarea structurii din Figura 1.22 este dată de:
√
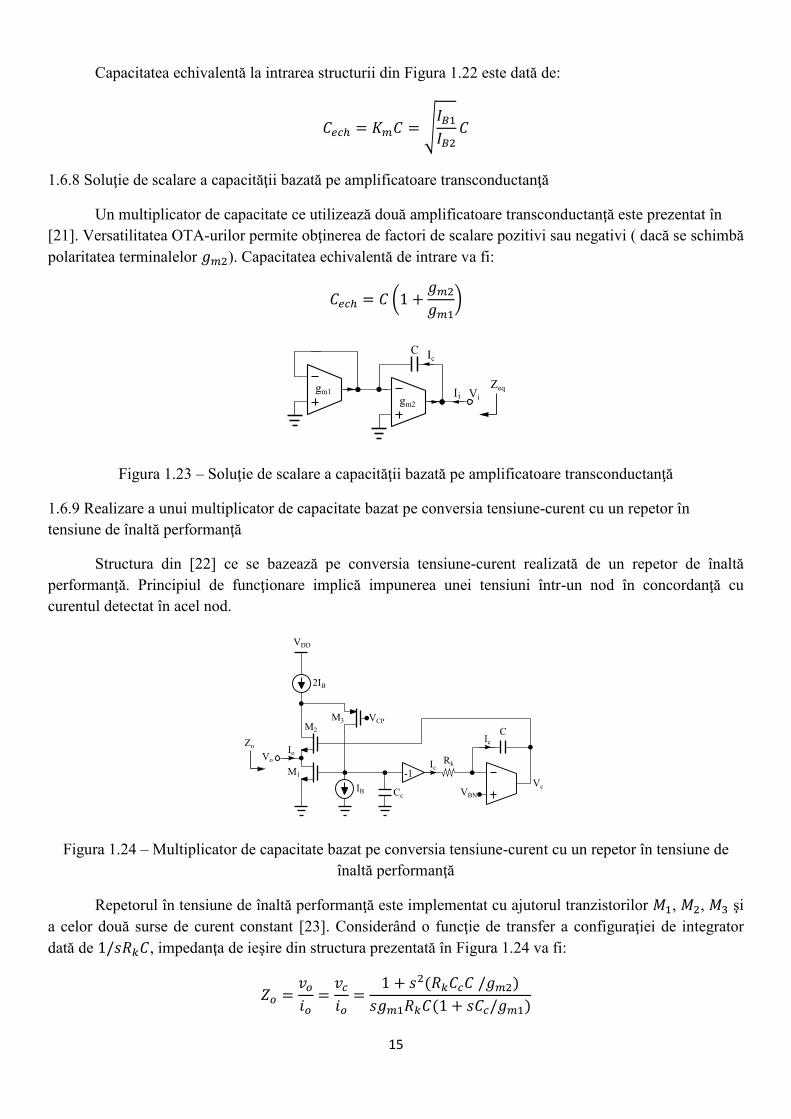
1.6.8 Soluţie de scalare a capacităţii bazată pe amplificatoare transconductanţă
Un multiplicator de capacitate ce utilizează două amplificatoare transconductanţă este prezentat în
[21]. Versatilitatea OTA-urilor permite obţinerea de factori de scalare pozitivi sau negativi ( dacă se schimbă
polaritatea terminalelor ). Capacitatea echivalentă de intrare va fi:
(
*
Figura 1.23 – Soluţie de scalare a capacităţii bazată pe amplificatoare transconductanţă
1.6.9 Realizare a unui multiplicator de capacitate bazat pe conversia tensiune-curent cu un repetor în
tensiune de înaltă performanţă
Structura din [22] ce se bazează pe conversia tensiune-curent realizată de un repetor de înaltă
performanţă. Principiul de funcţionare implică impunerea unei tensiuni într-un nod în concordanţă cu
curentul detectat în acel nod.
Figura 1.24 – Multiplicator de capacitate bazat pe conversia tensiune-curent cu un repetor în tensiune de
înaltă performanţă
Repetorul în tensiune de înaltă performanţă este implementat cu ajutorul tranzistorilor , , şi
a celor două surse de curent constant [23]. Considerând o funcţie de transfer a configuraţiei de integrator
dată de , impedanţa de ieşire din structura prezentată în Figura 1.24 va fi:
16
2. Utilizarea transconductorilor în implementarea filtrelor Gm-C
În continuare se vor prezenta câteva circuite simple [3], [6], [25], realizate cu ajutorul
transconductoarelor, circuite ce se vor regăsi ca elemente componente în filtrele Gm-C.
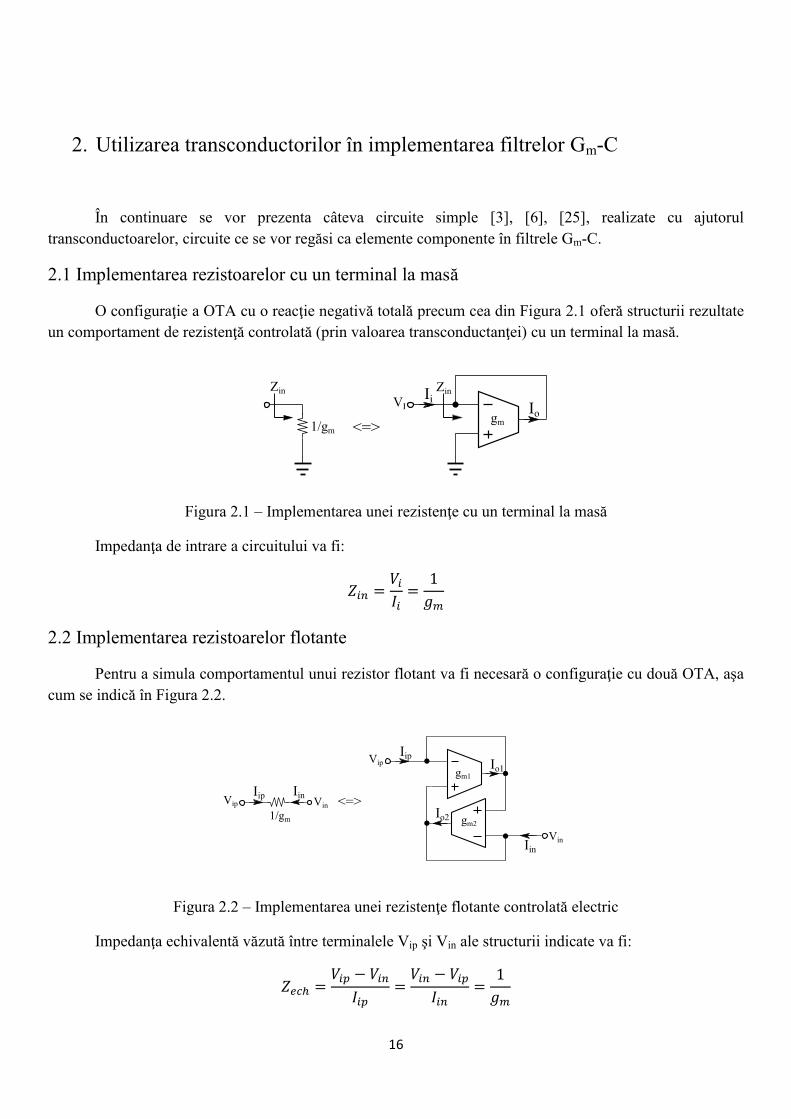
2.1 Implementarea rezistoarelor cu un terminal la masă
O configuraţie a OTA cu o reacţie negativă totală precum cea din Figura 2.1 oferă structurii rezultate
un comportament de rezistenţă controlată (prin valoarea transconductanţei) cu un terminal la masă.
Figura 2.1 – Implementarea unei rezistenţe cu un terminal la masă
Impedanţa de intrare a circuitului va fi:
2.2 Implementarea rezistoarelor flotante
Pentru a simula comportamentul unui rezistor flotant va fi necesară o configuraţie cu două OTA, aşa
cum se indică în Figura 2.2.
Figura 2.2 – Implementarea unei rezistenţe flotante controlată electric
Impedanţa echivalentă văzută între terminalele Vip şi Vin ale structurii indicate va fi:

17
2.3 Implementarea integratorului fără pierderi
Pentru implementarea acestuia sunt necesare un transconductor şi un condensator, după cum arată
Figura 2.3, operaţia de integrare a tensiunii diferenţiale de intrare rezultând facil.
Figura 2.3 – Realizarea unui integrator cu ajutorul OTA
2.4 Implementarea integratorului cu pierderi
Dacă se doreşte un grad în plus de programabilitate pentru integrator, demersul logic este să utilizăm
rezistorul cu un terminal la masă din Figura 2.1 pentru aceasta, rezultând structura din Figura 2.4.
Figura 2.4 – Simularea unui integrator cu pierderi cu ajutorul OTA
Funcţia de transfer a integratorului cu pierderi controlabil electric va fi:
2.5 Realizarea funcţiei de amplificare în tensiune
Amplificatoarele de tensiune, inversoare sau neinversoare, pot fi implementate facil conectand la
ieşirea OTA un rezistor ce va realiza conversia de la curentul de ieşire al transconductorului la tensiunea de
ieşire a amplificatorului de tensiune rezultat, Figura 2.5.
Figura 2.5 – Implementarea funcţiei de amplificare în tensiune cu ajutorul OTA

18
Transferul în tensiune al circuitului prezentat va fi:
2.6 Realizarea funcţiei de sumare algebrică ponderată a tensiunilor
Sumarea algebrică ponderată a tensiunilor se poate implementa extinzând structura prezentată pentru
realizarea amplificatorului în tensiune la cea prezentată în Figura 2.6.
Figura 2.6 – Implementarea funcţiei de sumare ponderată a tensiunilor cu ajutorul OTA
Expresia lui Vo ramâne sa fie dată de:
2.7 Realizarea inversorului de impedanţă pozitiv (giratorul)
Apelând la formalismul parametrilor ―y‖, un girator poate fi descris astfel:
Relaţia de mai sus corespunde unui circuit ce include două surse de curent controlate în tensiune, aşa
cum arată Figura 2.7.
Figura 2.7 – Implementarea giratorului utilizând două surse de curent comandate în tensiune
Transconductorul fiind în fapt o implementare de sursă de curent comandată în tensiune, apare acum
natural posibilitatea realizării giratorului cu ajutorul a două OTA, după cum indică Figura 2.8.
Figura 2.8 – Implementarea giratorului utilizând doi transconductori
19
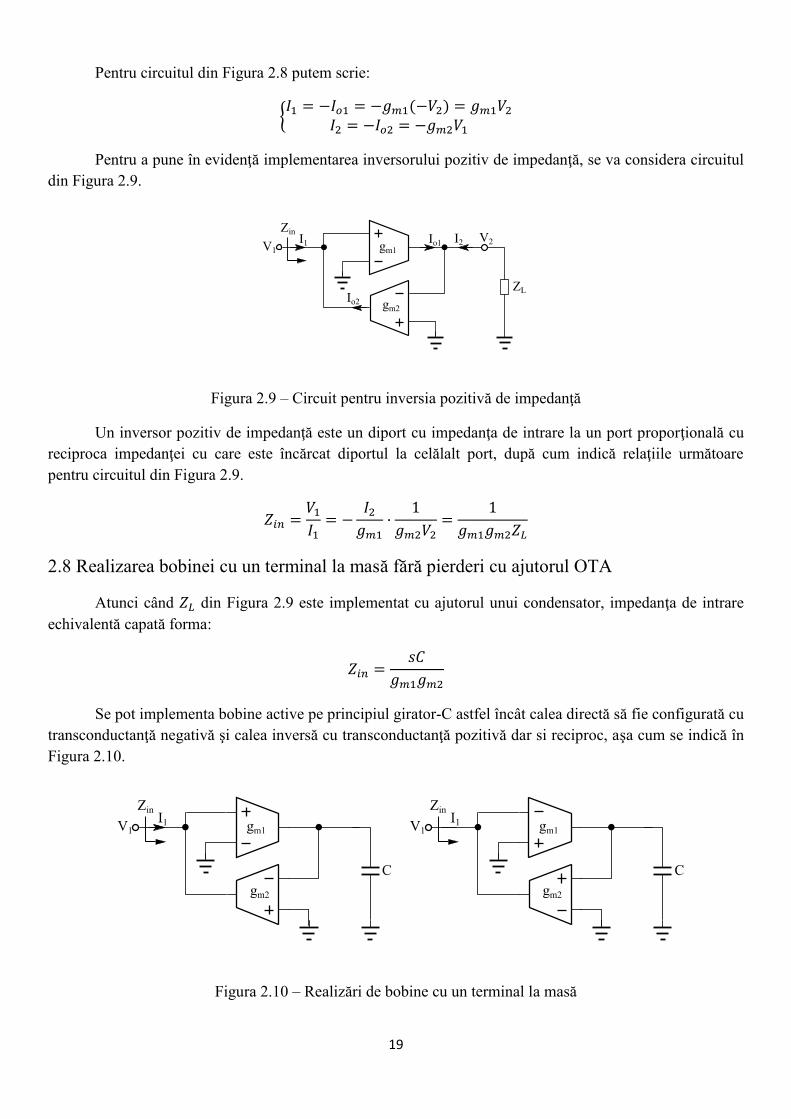
Pentru circuitul din Figura 2.8 putem scrie:
Pentru a pune în evidenţă implementarea inversorului pozitiv de impedanţă, se va considera circuitul
din Figura 2.9.
Figura 2.9 – Circuit pentru inversia pozitivă de impedanţă
Un inversor pozitiv de impedanţă este un diport cu impedanţa de intrare la un port proporţională cu
reciproca impedanţei cu care este încărcat diportul la celălalt port, după cum indică relaţiile următoare
pentru circuitul din Figura 2.9.
2.8 Realizarea bobinei cu un terminal la masă fără pierderi cu ajutorul OTA
Atunci când din Figura 2.9 este implementat cu ajutorul unui condensator, impedanţa de intrare
echivalentă capată forma:
Se pot implementa bobine active pe principiul girator-C astfel încât calea directă să fie configurată cu
transconductanţă negativă şi calea inversă cu transconductanţă pozitivă dar si reciproc, aşa cum se indică în
Figura 2.10.
Figura 2.10 – Realizări de bobine cu un terminal la masă

20
2.9 Realizarea bobinei flotante fără pierderi cu ajutorul OTA
Atunci când implementarea filtrului activ solicită existenţa unei bobine cu ambele terminale
disponibile, două inversoare pozitive de impedanţă precum cele prezentate anterior pot fi utilizate în
conjuncţie cu un condensator cu un terminal la masă, aşa cum indică şi Figura 2.11.
Figura 2.11 – Realizarea unei bobine flotante, fără pierderi, cu ajutorul a 4 OTA
Structura manifestă în acest fel o inductanţă echivalentă:
Optimizarea ariei consumate se poate realiza cu ajutorul structurii ce necesită doar trei instanţe de
transconductor reprezentată Figura 2.12.
Figura 2.12 – Realizarea unei bobine flotante fără pierderi cu ajutorul a 3 OTA
Putem merge chiar şi mai departe cu optimizarea utilizării ariei atunci când sunt disponibili
transconductori cu ieşire diferenţială (DOTA), strucura necesară implementării unei bobine flotante fără
pierderi necesitând doar două asemenea instanţe[26] dar şi un condensator suplimentar, aşa cum indică
Figura 2.13.
Figura 2.13 – Realizarea unei bobine flotante fără pierderi cu ajutorul a 2 DOTA
21
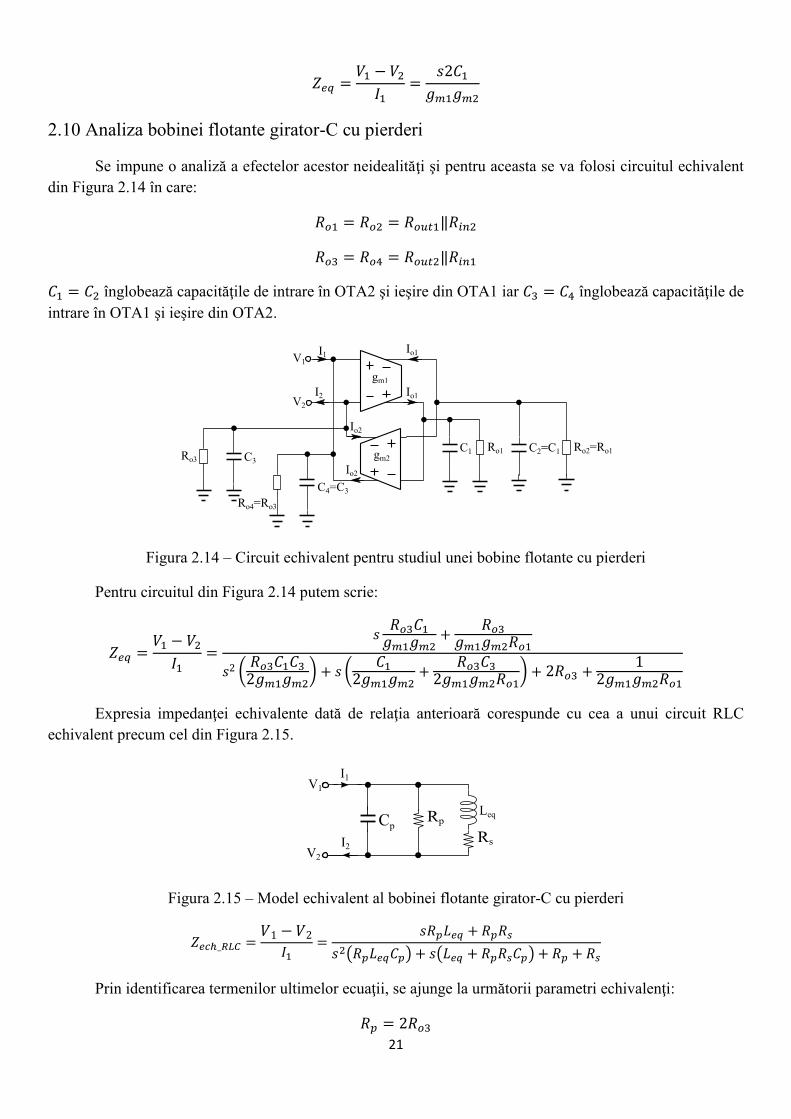
2.10 Analiza bobinei flotante girator-C cu pierderi
Se impune o analiză a efectelor acestor neidealităţi şi pentru aceasta se va folosi circuitul echivalent
din Figura 2.14 în care:
înglobează capacităţile de intrare în OTA2 şi ieşire din OTA1 iar înglobează capacităţile de
intrare în OTA1 şi ieşire din OTA2.
Figura 2.14 – Circuit echivalent pentru studiul unei bobine flotante cu pierderi
Pentru circuitul din Figura 2.14 putem scrie:
(
* (
*
Expresia impedanţei echivalente dată de relaţia anterioară corespunde cu cea a unui circuit RLC
echivalent precum cel din Figura 2.15.
Figura 2.15 – Model echivalent al bobinei flotante girator-C cu pierderi
( ) ( )
Prin identificarea termenilor ultimelor ecuaţii, se ajunge la următorii parametri echivalenţi:

22
Pentru amplitudini ale semnalelor suficient de mici astfel încât să se poată considera valabil un regim
de semnal mic, factorul de calitate al unei bobine active girator-C [26] este definit de:
[ (
)
]
Pentru a ilustra modul în care o rezistenţă negativă conectată în paralel poate compensa pierderile
modelate de rezistenţa serie , trebuie precizat că ramura dată de topologia serie a şi poate fi
echivalată, pentru o anumită frecvenţă, cu o topologie paralel [27] conform relaţiilor:
unde
Figura 2.16 – Transformarea L-R serie în L-R paralel
Dacă pentru creşterea lui se utilizează o rezistenţă negativă care are o capacitate proprie ,
rezistenţa echivalentă paralel devine ‖ ‖ şi expresia factorului de calitate va fi:
√
O proiectare îngrijită a acestei rezistenţe negative implică asigurarea posibilităţii de a compensa
rezistenţa paralel pe întregul domeniu de acord al inductanţei active.
2.11 Realizarea filtrelor pasive prin simularea elementelor
O posibilă abordare în sinteza filtrelor analogice este înlocuirea fiecărui element pasiv din
componenţă cu echivalentul său activ simulat în forma Gm-C. Mai precis, bobina se va înlocui cu un girator
23
realizat cu transconductori şi condensatoare iar rezistorii cu transconductori peste care s-a aplicat o reacţie
totală. Să considerăm filtrul trece bandă din Figura 2.17.
Figura 2.17 – Filtru pasiv RLC
Pentru a face o implementare eficientă din punct de vedere al ariei consumate se va face mai întâi o
echivalare Thevenin a secţiunii V1-R1, rezultând astfel circuitul din Figura 2.18
Figura 2.18 – Filtru pasiv echivalent
Va rezulta astfel circuitul Gm-C din Figura 2.19:
Figura 2.19 – Implementarea Gm-C a filtrului pasiv din Figura 2.17
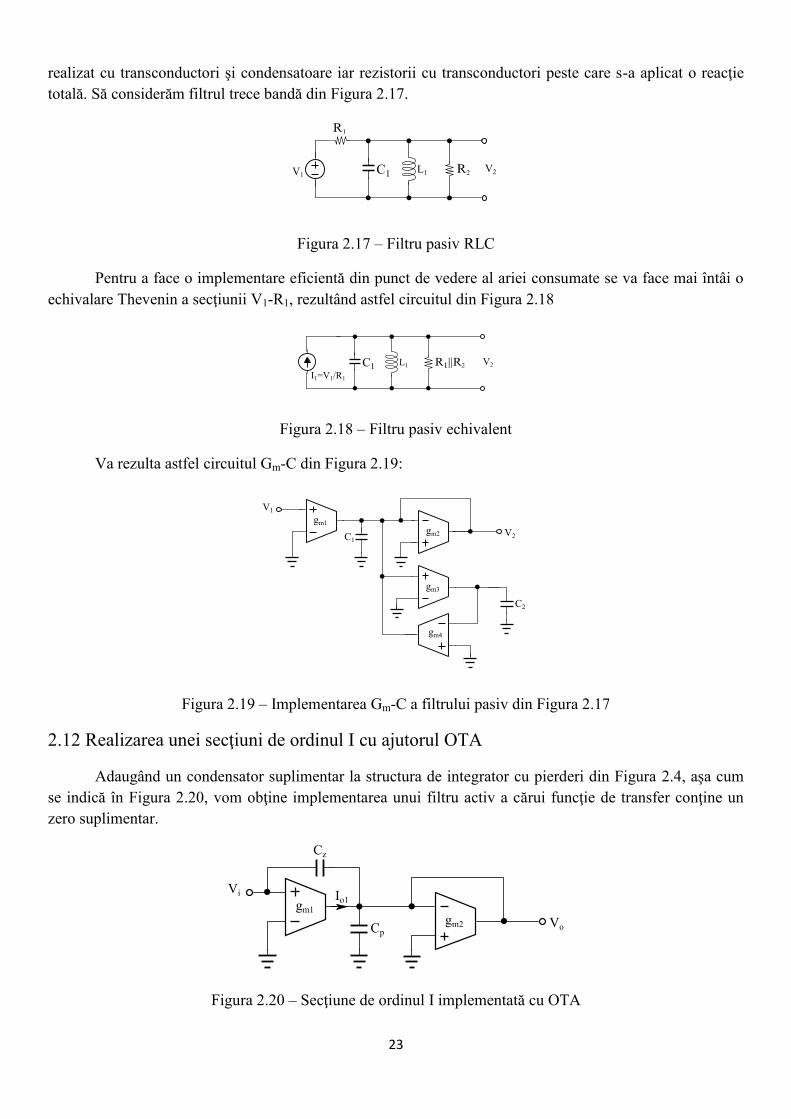
2.12 Realizarea unei secţiuni de ordinul I cu ajutorul OTA
Adaugând un condensator suplimentar la structura de integrator cu pierderi din Figura 2.4, aşa cum
se indică în Figura 2.20, vom obţine implementarea unui filtru activ a cărui funcţie de transfer conţine un
zero suplimentar.
Figura 2.20 – Secţiune de ordinul I implementată cu OTA
24
Funcţia de transfer implementată astfel va fi:
( )
2.13 Realizarea unui biquad trece jos cu ajutorul OTA
Utilizând două instanţe de OTA şi două condensatoare se poate implementa un biquad trece jos cu
câştig unitar în curent continuu, precum cel din Figura 2.21:
Figura 2.21 – Biquad trece jos implementat cu OTA
Funcţia de transfer a biquadului va fi:
2.14 Realizarea unui biquad trece bandă cu ajutorul OTA
Utilizând aceleaşi componente ca la aplicaţia anterioară, dar într-o alta configuraţie, putem obţine
biquadul trece bandă reprezentat în Figura 2.22.
Figura 2.22 – Biquad trece bandă implementat cu OTA
Funcţia de transfer a biquadului va fi:
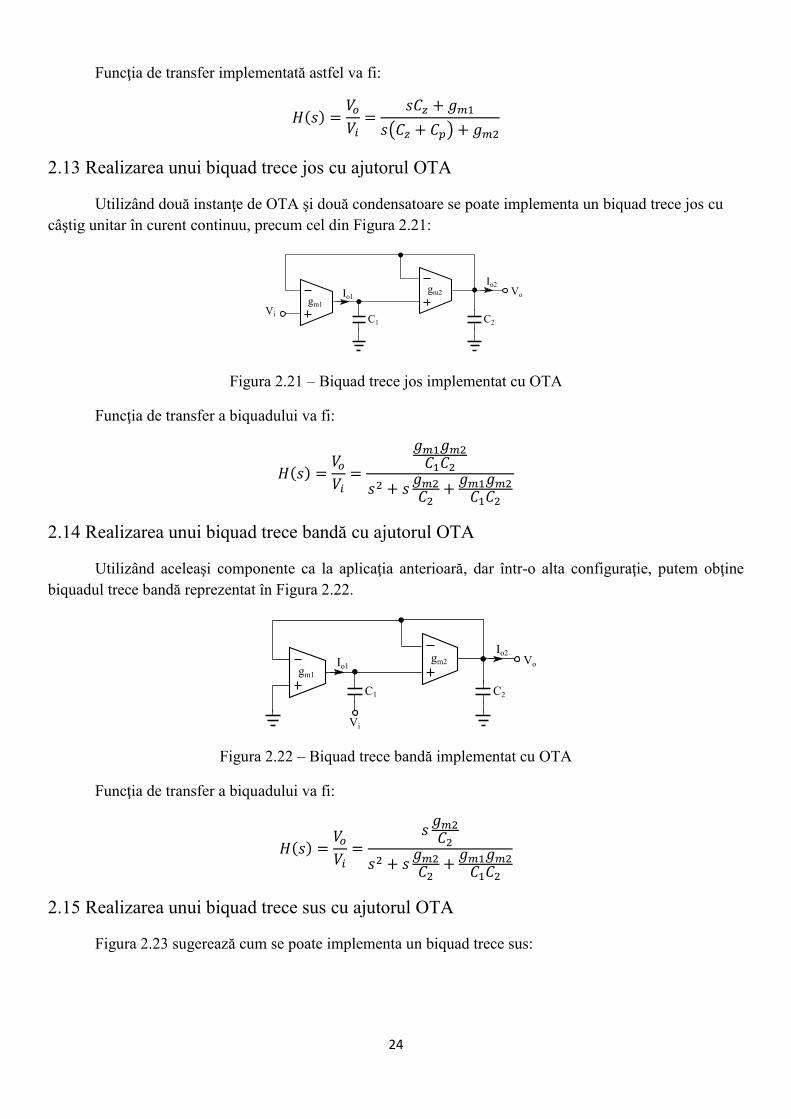
2.15 Realizarea unui biquad trece sus cu ajutorul OTA
Figura 2.23 sugerează cum se poate implementa un biquad trece sus:
25
Figura 2.23 – Biquad trece sus implementat cu OTA
Funcţia de transfer a biquadului trece sus va fi:
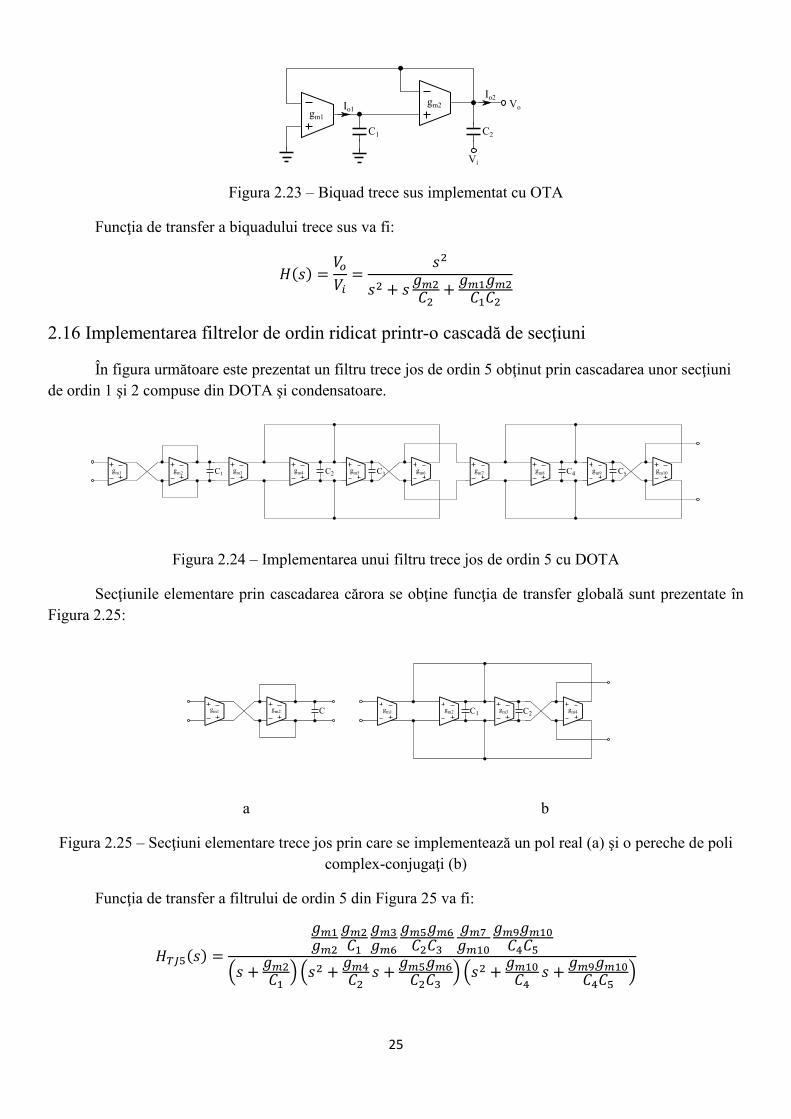
2.16 Implementarea filtrelor de ordin ridicat printr-o cascadă de secţiuni
În figura următoare este prezentat un filtru trece jos de ordin 5 obţinut prin cascadarea unor secţiuni
de ordin 1 şi 2 compuse din DOTA şi condensatoare.
Figura 2.24 – Implementarea unui filtru trece jos de ordin 5 cu DOTA
Secţiunile elementare prin cascadarea cărora se obţine funcţia de transfer globală sunt prezentate în
Figura 2.25:
a b
Figura 2.25 – Secţiuni elementare trece jos prin care se implementează un pol real (a) şi o pereche de poli
complex-conjugaţi (b)
Funcţia de transfer a filtrului de ordin 5 din Figura 25 va fi:
(
) (
) (
)

26
3. Contribuţii la dezvoltarea elementelor de circuit controlate electric
3.1 Soluţie de circuit pentru ajustarea transconductanţei prin curentul de polarizare
În continuare se va prezenta un circuit CMOS capabil să multiplice valoarea unui curent de referinţă
în scopul polarizării [38], factorul de multiplicare putând fi programat printr-o interfaţă numerică în
domeniul 1-1024.
3.1.1 Programabilitate şi controlabilitate în oglinzile de curent
Programabilitatea este implementată prin utilizarea de comutatoare care în esenţă ajustează raportul
între tranzistorii „cap de oglindă‖ şi „client‖. Aceste comutatoare pot fi plasate în serie cu porţile
tranzistorilor „client‖, asa cum este propus în [28]-[30] şi ilustrat în Figura 3.1.
Figura 3.1 – Oglindă de curent programabilă ce utilizează comutatoare înseriate cu grilele tranzistorilor
„client‖
Implementarea programabilităţii poate fi realizată şi prin plasarea de comutatoare în serie cu drenele
tranzistoarelor componente ale oglinzilor, aşa cum este prezentat în [31] şi ilustrat în Figura 3.2. Ca şi în
cazul structurii prezentate în Figura 3.1, programabilitatea este obţinută prin ajustarea lăţimii efective a
tranzistoarelor „client‖ şi/sau „cap de oglindă‖, prin plasarea de mai multe sau mai puţine fingere de
tranzistor în paralel.
Figura 3.2 – Oglindă de curent programabilă ce utilizează comutatoare înseriate cu drenele tranzistorilor
„client‖ şi „cap de oglindă‖
O metodă alternativă de programabilitate a factorului de oglindire al oglinzii este aceea de a varia
lungimea efectivă a tranzistoarelor „client‖ şi/sau „cap de oglindă‖, prin plasarea de mai multe sau mai
puţine fingere de tranzistor în serie, aşa cum este prezentat în [32] şi ilustrat în Figura 3.3.
27
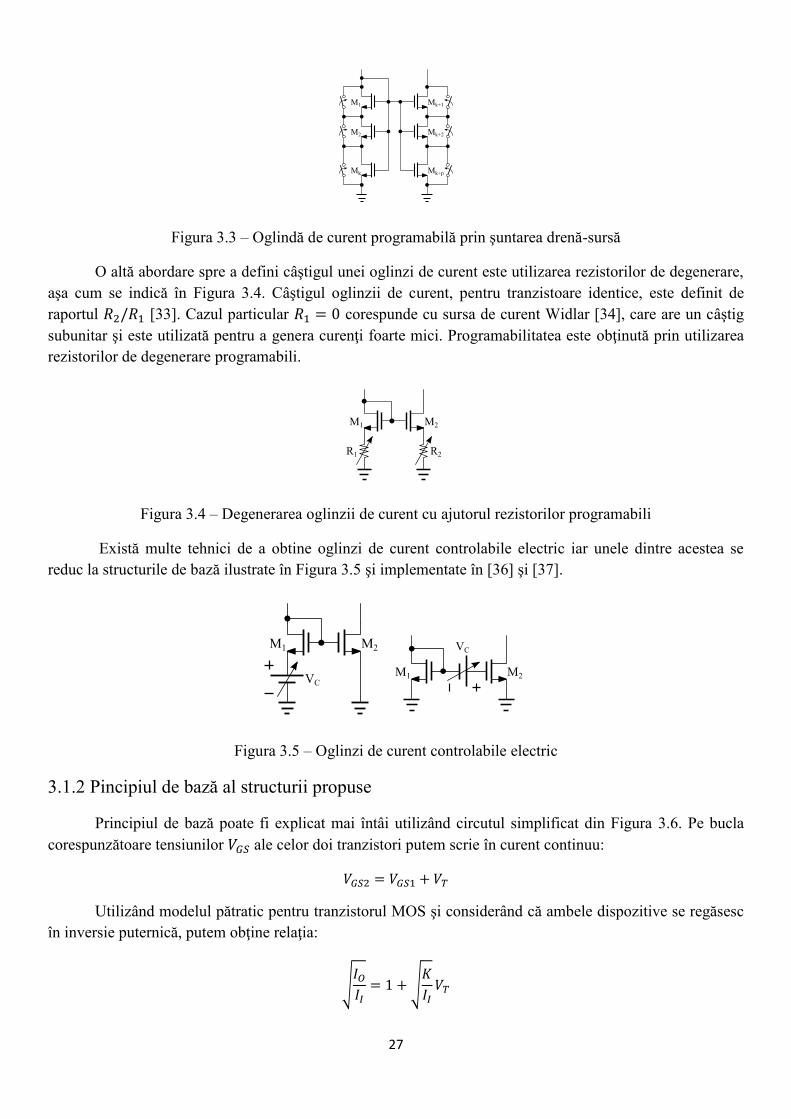
Figura 3.3 – Oglindă de curent programabilă prin şuntarea drenă-sursă
O altă abordare spre a defini câştigul unei oglinzi de curent este utilizarea rezistorilor de degenerare,
aşa cum se indică în Figura 3.4. Câştigul oglinzii de curent, pentru tranzistoare identice, este definit de
raportul [33]. Cazul particular corespunde cu sursa de curent Widlar [34], care are un câştig
subunitar şi este utilizată pentru a genera curenţi foarte mici. Programabilitatea este obţinută prin utilizarea
rezistorilor de degenerare programabili.
Figura 3.4 – Degenerarea oglinzii de curent cu ajutorul rezistorilor programabili
Există multe tehnici de a obtine oglinzi de curent controlabile electric iar unele dintre acestea se
reduc la structurile de bază ilustrate în Figura 3.5 şi implementate în [36] şi [37].
Figura 3.5 – Oglinzi de curent controlabile electric
3.1.2 Pincipiul de bază al structurii propuse
Principiul de bază poate fi explicat mai întâi utilizând circutul simplificat din Figura 3.6. Pe bucla
corespunzătoare tensiunilor ale celor doi tranzistori putem scrie în curent continuu:
Utilizând modelul pătratic pentru tranzistorul MOS şi considerând că ambele dispozitive se regăsesc
în inversie puternică, putem obţine relaţia:
√
√

28
unde şi sunt componentele continue ale curenţilor de intrare şi ieşire. Legat de această ultimă relaţie
putem remarca faptul că amplificarea de curent continuu devine 1 dacă tensiunea de reglaj este nulă. De
asemenea, dacă este un curent de polarizare, , curentul de ieşire rămâne să fie o replică amplificată
cu ( √ ) a acelui curent de polarizare.
Figura 3.6 – Schemă simplificată a oglinzii de curent dezechilibrate controlat
Pentru componentele de semnl mic putem scrie:
unde √ este transconductanţa de semnal mic a tranzistorului.
Utilizând relaţia obtinută între componentele de curent continuu, rezultă:
√
√
O modalitate practică de implementare a sursei de tensiune din circuitul ilustrat în Figura 3.6 este
utilizarea unui rezistor şi a unui curent continuu de reglaj, aşa cum se indică în Figura 3.7.
Figura 3.7 – Implementare practică a oglinzii de curent dezechilibrate
Relaţia între componentele continue ale curenţilor din Figura 3.7 va fi:
√
√
iar relaţia corespunzătoare dintre componentele de semnal mic:
√
29
Combinând ultimele două relaţii şi considerând o valoare constantă pentru componenta continuă a
curentului de intrare, , rezultă următoarea expresie pentru amplificarea de semnal mic în curent:
√
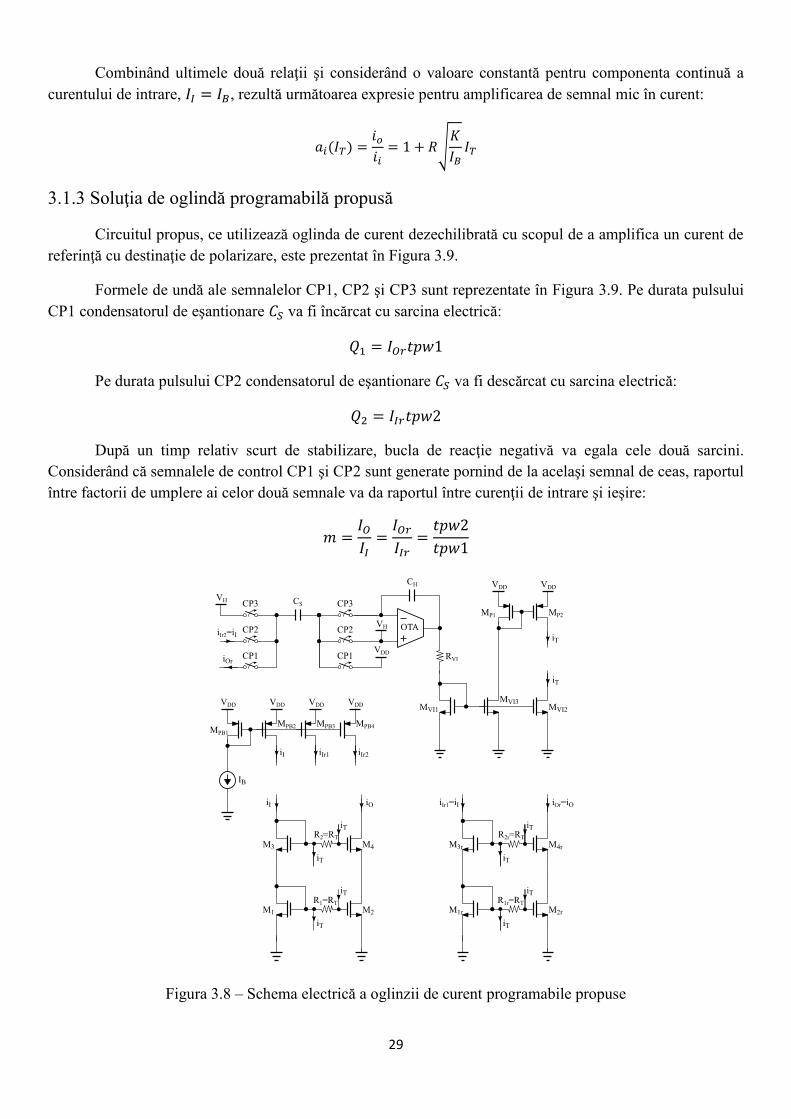
3.1.3 Soluţia de oglindă programabilă propusă
Circuitul propus, ce utilizează oglinda de curent dezechilibrată cu scopul de a amplifica un curent de
referinţă cu destinaţie de polarizare, este prezentat în Figura 3.9.
Formele de undă ale semnalelor CP1, CP2 şi CP3 sunt reprezentate în Figura 3.9. Pe durata pulsului
CP1 condensatorul de eşantionare va fi încărcat cu sarcina electrică:
Pe durata pulsului CP2 condensatorul de eşantionare va fi descărcat cu sarcina electrică:
După un timp relativ scurt de stabilizare, bucla de reacţie negativă va egala cele două sarcini.
Considerând că semnalele de control CP1 şi CP2 sunt generate pornind de la acelaşi semnal de ceas, raportul
între factorii de umplere ai celor două semnale va da raportul între curenţii de intrare şi ieşire:
Figura 3.8 – Schema electrică a oglinzii de curent programabile propuse

30
Figura 3.9 – Forma de undă a semnalelor de comandă
3.1.4 Studiul stabilităţii sistemului propus
Analiza stabilităţii poate fi efectuată pe circuitul echivalent la semnal mic şi regim permanent ilustrat
în Figura 3.10:
Figura 3.10 – Circuit echivalent la semnal mic şi regim staţionar
Acumularea sarcinii în condensatorul de integrare este descrisă de ecuaţia:
[ ] [ ] [ ]
Multiplicând prin
, rezultă:
[ ] [ ]
[ ]
[ ]
Aplicând transformata ultimei ecuaţii cu diferenţe se va obţine:
În regim permanent ( ), câştigul va fi cel aşteptat:
31
Condiţia de stabilitate impune ca polul să se regăsească în interiorul cercului unitate | | . În
consecinţă, proiectarea trebuie să asigure îndeplinirea următoarei condiţii:
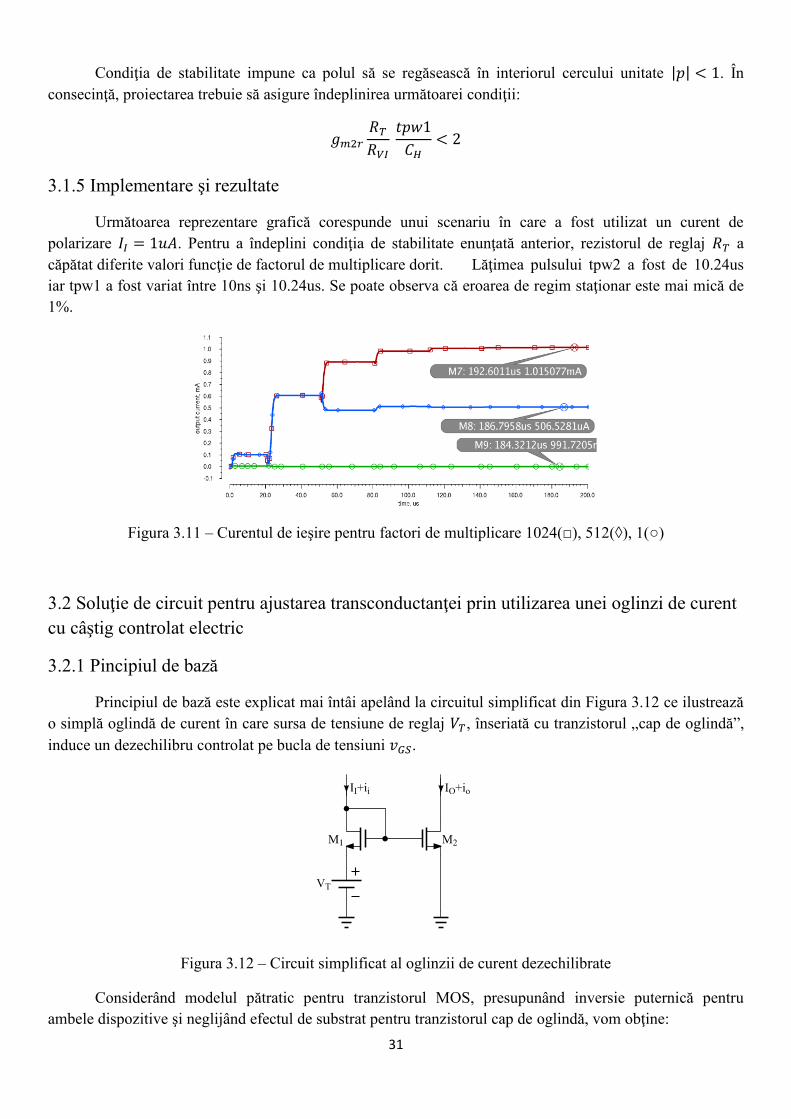
3.1.5 Implementare şi rezultate
Următoarea reprezentare grafică corespunde unui scenariu în care a fost utilizat un curent de
polarizare . Pentru a îndeplini condiţia de stabilitate enunţată anterior, rezistorul de reglaj a
căpătat diferite valori funcţie de factorul de multiplicare dorit. Lăţimea pulsului tpw2 a fost de 10.24us
iar tpw1 a fost variat între 10ns şi 10.24us. Se poate observa că eroarea de regim staţionar este mai mică de
1%.
Figura 3.11 – Curentul de ieşire pentru factori de multiplicare 1024(), 512(◊), 1()
3.2 Soluţie de circuit pentru ajustarea transconductanţei prin utilizarea unei oglinzi de curent
cu câştig controlat electric
3.2.1 Pincipiul de bază
Principiul de bază este explicat mai întâi apelând la circuitul simplificat din Figura 3.12 ce ilustrează
o simplă oglindă de curent în care sursa de tensiune de reglaj , înseriată cu tranzistorul „cap de oglindă‖,
induce un dezechilibru controlat pe bucla de tensiuni .
Figura 3.12 – Circuit simplificat al oglinzii de curent dezechilibrate
Considerând modelul pătratic pentru tranzistorul MOS, presupunând inversie puternică pentru
ambele dispozitive şi neglijând efectul de substrat pentru tranzistorul cap de oglindă, vom obţine:

32
√
√
Pentru componentele de semnal mic putem scrie:
Utilizând relaţia obţinută pentru componentele de curent continuu, vom obţine:
√
√
O soluţie practică de a implementa sursa de tensiune din Figura 3.12 este de a utiliza un rezistor şi un
curent continuu de reglaj, aşa cum se indică în Figura 3.13.
Figura 3.13 –Implementare la nivel de circuit a oglinzii de curent dezechilibrate
Considerând componenta de curent continuu a intrării dată de un curent de polarizare, ,
amplificarea de curent de semnal mic devine:
(
*
(
*
3.2.2 Transconductorul ajustabil propus
Un transconductor ajustabil ce utilizează două instanţe ale oglinzii de curent dezechilibrate controlat,
prezentate anterior, ca şi elemente de reglaj, este prezentat în Figura 3.14. Oglinda dezechilibrată controlat,
prezentată anterior, este instanţiată aici sub forma unei oglinzi cascodate pregătite pentru procesarea
semnalelor de amplitudini mari. La circuitul ilustrat în Figura 3.14 se adaugă structura din Figura 3.15.
Utilizând din nou rezultatele studiului efectuat pe oglinda dezechilibrată, se ajunge la următoarea expresie
pentru transconductanţă:
[
(
*
(
*]

33
Figura 3.14 – Schema transconductorului ajustabil propus
Figura 3.15 – Buclă de control al modului comun la ieşire
3.2.3 Analiza în frecvenţă a transconductorului propus
Studiul comportării în frecvenţă a fost făcut cu focus pe integratorul Gm-C, aşa cum se observă în
schema echivalentă din Figura 3.16 unde este condensatorul de compensare, este capacitatea totală în
nodul grilei tranzistorului iar capacitatea de ieşire ( incluzând şi capacitatea de integrare).Expresia
funcţiei de transfer va fi:

34
Figura 3.16 – Circuit echivalent simplificat pentru analiza în frecvenţă a integratorului Gm-C
3.2.4 Analiza de neliniaritate a transconductorului propus
Pentru analiza de neliniaritate a transconductorului am utilizat modelul pătratic pentru tranzistorul
MOS şi am considerat că etajul de intrare este liniar ( ) datorită prezenţei rezistorilor
de degenerare. Expresia curentului de ieşire diferenţial va fi:
[ ] √ [ √ √ ]
În continuare se va dezvolta în serie Taylor expresia lui până la termenul de ordin 3, în jurul
punctului , cu scopul de a obţine o expresie de forma:
Factorul de distorsiuni rămâne să fie:
|
|
3.2.5 Analiza de zgomot a transconductorului propus
Analiza de zgomot [40] a fost efectuată pe semicircuitul pe mod diferenţial ilustrat în Figura 3.17.
Sursele de zgomot adăugate sunt considerate necorelate. Sursa de curent de zgomot cumulează
contribuţia de zgomot a celeilalte jumătăţi de circuit.
Figura 3.17 – Semicircuitul pe mod diferenţial al transconductorului propus, cu surse de zgomot adăugate
35
Considerând pentru tranzistori doar zgomotul termic, expresia densităţii spectrale de putere a
tensiunii echivalente de zgomot de la intrare devine:
(
*
(
*
(
*
[ (
*
(
*
]
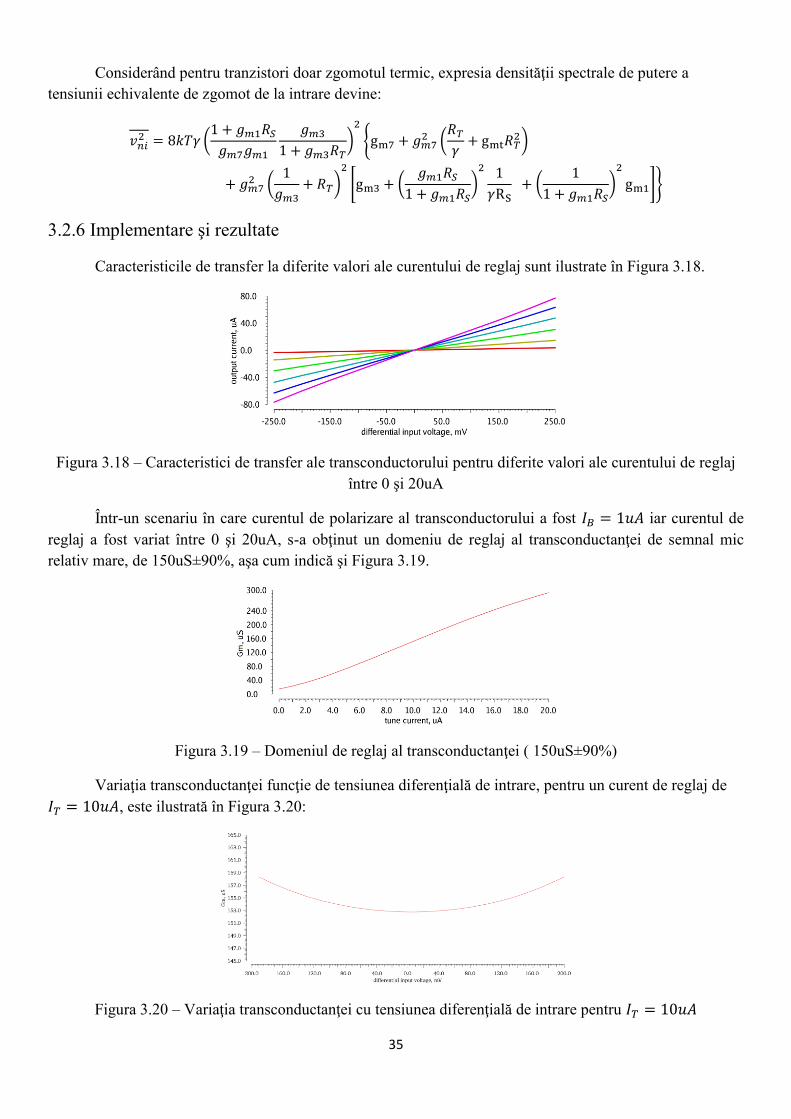
3.2.6 Implementare şi rezultate
Caracteristicile de transfer la diferite valori ale curentului de reglaj sunt ilustrate în Figura 3.18.
Figura 3.18 – Caracteristici de transfer ale transconductorului pentru diferite valori ale curentului de reglaj
între 0 şi 20uA
Într-un scenariu în care curentul de polarizare al transconductorului a fost iar curentul de
reglaj a fost variat între 0 şi 20uA, s-a obţinut un domeniu de reglaj al transconductanţei de semnal mic
relativ mare, de 150uS±90%, aşa cum indică şi Figura 3.19.
Figura 3.19 – Domeniul de reglaj al transconductanţei ( 150uS±90%)
Variaţia transconductanţei funcţie de tensiunea diferenţială de intrare, pentru un curent de reglaj de
, este ilustrată în Figura 3.20:
Figura 3.20 – Variaţia transconductanţei cu tensiunea diferenţială de intrare pentru

36
Rezultatele simularilor de zgomot relevă o valoare de aproximativ 40fV2Hz
-1 în zona frecvenţelor de
1MHz, deci după frecvenţa de cot specifică flicker-ului, aşa cum se indică în Figura 3.21.
Figura 3.21 – Densitatea spectală de putere a tensiunii de zgomot referite la intrare
Evoluţia factorului de distorsiuni al curentului de ieşire al transconductorului propus odată cu
amplitudinea tensiunii diferenţiale de intrare, pentru o valoare medie a curentului de reglaj, este ilustrată în
Figura 3.22.
Figura 3.22 – Variaţia THD în funcţie de amplitudinea tensiunii de intrare diferenţiale
3.3 A doua soluţie de circuit pentru ajustarea transconductanţei prin utilizarea unei oglinzi de
curent cu câştig controlat electric
3.3.1 A doua soluţie de amplificator cu transconductanţă ajustabilă
Transconductorul ajustabil ce utilizează ca şi elemente de reglaj două instanţe ale oglinzii de curent
dezechilibrate controlat ilustrate în Figura 3.7 este prezentat în Figura 3.23.Şi această a doua soluţie de
implementare a transconductanţei ajustabile foloseşte o arhitectură cu etaj diferenţial degenerat rezistiv
urmată de oglinda cu câştig controlat electric implementată cu NMOS şi apoi de o oglindă cu câştig unitar
implementată cu PMOS. Diferenţa esenţială faţă de cea dintâi soluţie de transconductor ajustabil este dată de
plasarea rezistorului de reglaj, ce implementează sursa de tensiune de dezechilibrare a buclei de tensiuni ,
nu în serie cu tranzistorul cap de oglindă ci între grilele tranzistorilor cap şi client de oglindă. Dezavantajul
noii structuri este dat de necesitatea integrării unui numar dublu de rezistori de reglaj şi respectiv de surse de
curent de reglaj, consecinţe imediate putând fi remarcate în ceea ce priveşte aria ocupată pe cip şi respectiv
performanţele de zgomot[40]. Utilizând rezultatele studiului efectuat pe oglinda de curent dezechilibrată
prezentată în Figura 3.7 şi particularizându-le pentru structurile M4-M6-M8 şi M3-M5-M7, se ajunge la
următoarea expresie pentru transconductanţă:
( √
)
37
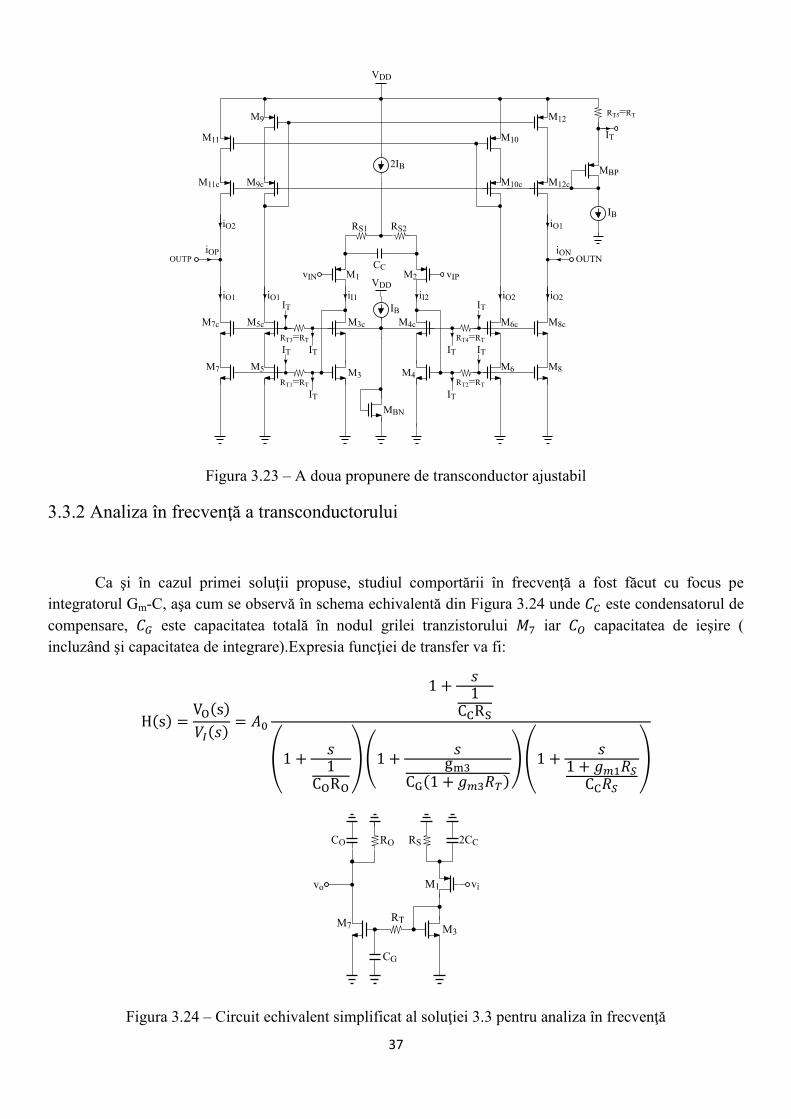
Figura 3.23 – A doua propunere de transconductor ajustabil
3.3.2 Analiza în frecvenţă a transconductorului
Ca şi în cazul primei soluţii propuse, studiul comportării în frecvenţă a fost făcut cu focus pe
integratorul Gm-C, aşa cum se observă în schema echivalentă din Figura 3.24 unde este condensatorul de
compensare, este capacitatea totală în nodul grilei tranzistorului iar capacitatea de ieşire (
incluzând şi capacitatea de integrare).Expresia funcţiei de transfer va fi:
(
)(
)(
)
Figura 3.24 – Circuit echivalent simplificat al soluţiei 3.3 pentru analiza în frecvenţă

38
3.3.3 Analiza de neliniaritate a transconductorului
Utilizând modelul pătratic pentru tranzistorul MOS şi considerând că etajul de intrare este liniar
( ) datorită prezenţei rezistorilor de degenerare, pe bucla expresia curentului de ieşire
va fi:
√ (√ √ )
În continuare se va dezvolta în serie Taylor expresia lui până la termenul de ordin 3, în jurul
punctului , cu scopul de a obţine o expresie de forma:
Factorul de distorsiuni rămâne să fie:
|
|
√
(√ √ )
3.3.4 Analiza de zgomot a transconductorului
Analiza de zgomot a fost efectuată pe semicircuitul pe mod diferenţial ilustrat în Figura 3.25 în care
sursele de zgomot adaugate sunt considerate necorelate iar sursa de curent de zgomot cumulează
contribuţia de zgomot a celeilalte jumătăţi de circuit.
Figura 3.25 – Semicircuitul pe mod diferenţial al soluţiei 3.3, cu surse de zgomot adăugate
Considerând pentru tranzistori doar zgomotul termic, expresia densităţii spectrale de putere a
tensiunii echivalente de zgomot de la intrare devine:
(
*
[(
*
]

39
Considerând (pentru tranzistorii cu canal lung), se ajunge la următoarea valoare pentru
densitatea spectrală de putere a tensiunii echivalente de zgomot de la intrare:
3.3.5 Implementarea şi rezultatele simulărilor transconductorului
Caracteristicile de transfer la diferite valori ale curentului de reglaj din intervalul sunt ilustrate în
Figura 3.26.
Figura 3.26 – Caracteristici de transfer ale transconductorului 3.3
Într-un scenariu în care curentul de polarizare al transconductorului a fost iar curentul de
reglaj a fost variat între 0 şi 25uA, s-a obţinut un domeniu larg de reglaj al transconductanţei de semnal mic,
de 92uS±90%, aşa cum indică şi Figura 3.27. Variaţia transconductanţei funcţie de tensiunea diferenţială de
intrare, pentru un curent de reglaj , este ilustrată în Figura 3.28:
Figura 3.27 – Domeniul de reglaj al transconductanţei ( 92uS±90%)
Figura 3.28 – Variaţia transconductanţei cu tensiunea diferenţială de intrare pentru
40
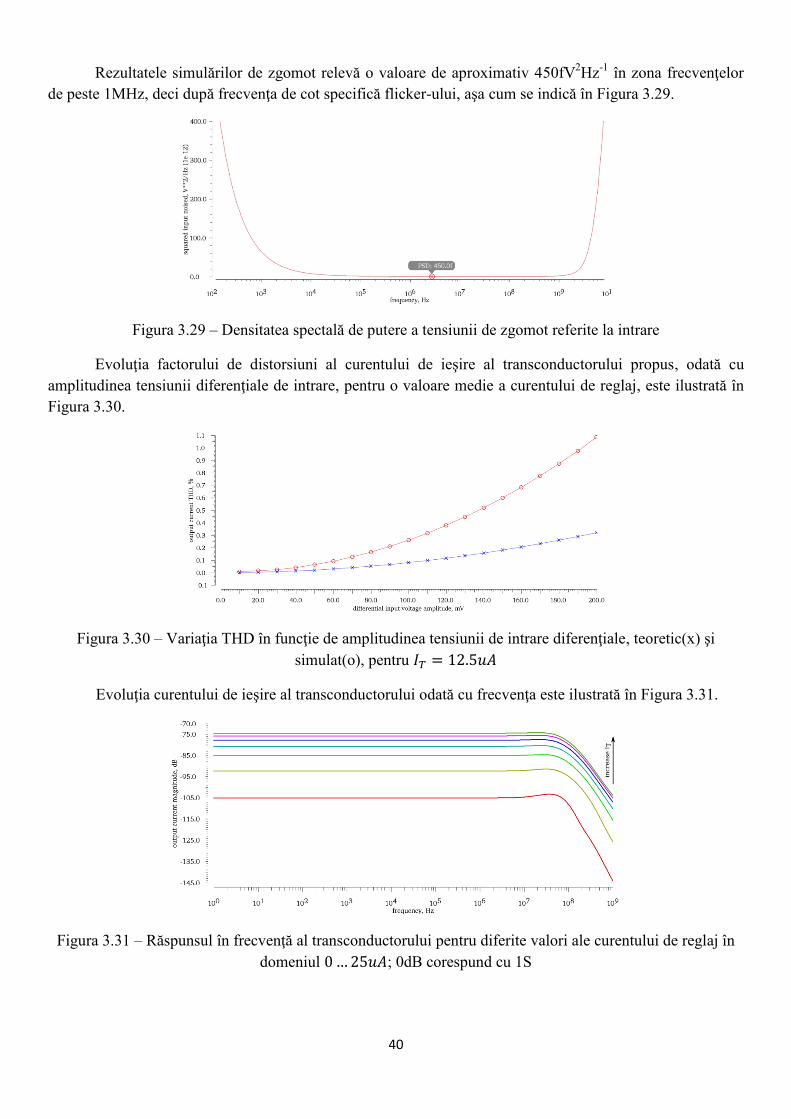
Rezultatele simulărilor de zgomot relevă o valoare de aproximativ 450fV2Hz
-1 în zona frecvenţelor
de peste 1MHz, deci după frecvenţa de cot specifică flicker-ului, aşa cum se indică în Figura 3.29.
Figura 3.29 – Densitatea spectală de putere a tensiunii de zgomot referite la intrare
Evoluţia factorului de distorsiuni al curentului de ieşire al transconductorului propus, odată cu
amplitudinea tensiunii diferenţiale de intrare, pentru o valoare medie a curentului de reglaj, este ilustrată în
Figura 3.30.
Figura 3.30 – Variaţia THD în funcţie de amplitudinea tensiunii de intrare diferenţiale, teoretic(x) şi
simulat(o), pentru
Evoluţia curentului de ieşire al transconductorului odată cu frecvenţa este ilustrată în Figura 3.31.
Figura 3.31 – Răspunsul în frecvenţă al transconductorului pentru diferite valori ale curentului de reglaj în
domeniul ; 0dB corespund cu 1S

41
3.3.6 O comparaţie între cele două soluţii de transconductor
În [40] a fost prezentată o analiză comparativă a structurilor de transconductor ilustrate în secţiunile
3.2 şi 3.3. Au fost trecuţi în revistă parametri ca valoarea maximă a transconductanţei, domeniul de ajustare
al transconductanţei, liniaritatea, comportarea în frecvenţă precum şi zgomotul, rezultatele acestei
comparaţii fiind redate în Tabelul 3.1.
Tabelul 3.1 – Comparaţie între performanţele celor două structuri de transconductor
Structura 3.2 Structura 3.3
Arie ocupată + -
Gm_max + -
Domeniu ajustare Gm + -
Liniaritate 0 0
Gamă dinamică
intrare
- +
Zgomot + -
Bandă 0 0
3.4 Soluţie de circuit pentru multiplicarea capacităţii utilizând amplificatoare
transconductanţă cu câştig ajustabil
3.4.1 Multiplicatorul de capacitate propus
Se ştie că, dat fiind că în tehnologia CMOS este mai usor de implementat un amplificator operaţional
transconductanţă decât un amplificator operaţional, putem dezvolta multiplicatoare de capacitate, utilizând
efectul Miller în cazul unui condensator ce constituie reţeaua de reacţie negativă a unui transconductor, aşa
cum se indică în Figura 3.32.
Figura 3.32 – Multiplicator de capacitate implementat cu un OTA
Amplificarea în tensiune a transconductorului va fi:
unde este rezistenţa de ieşire a transconductorului. Capacitatea echivalentă la intrarea multiplicatorului
de capacitate va fi dată de:
.
42
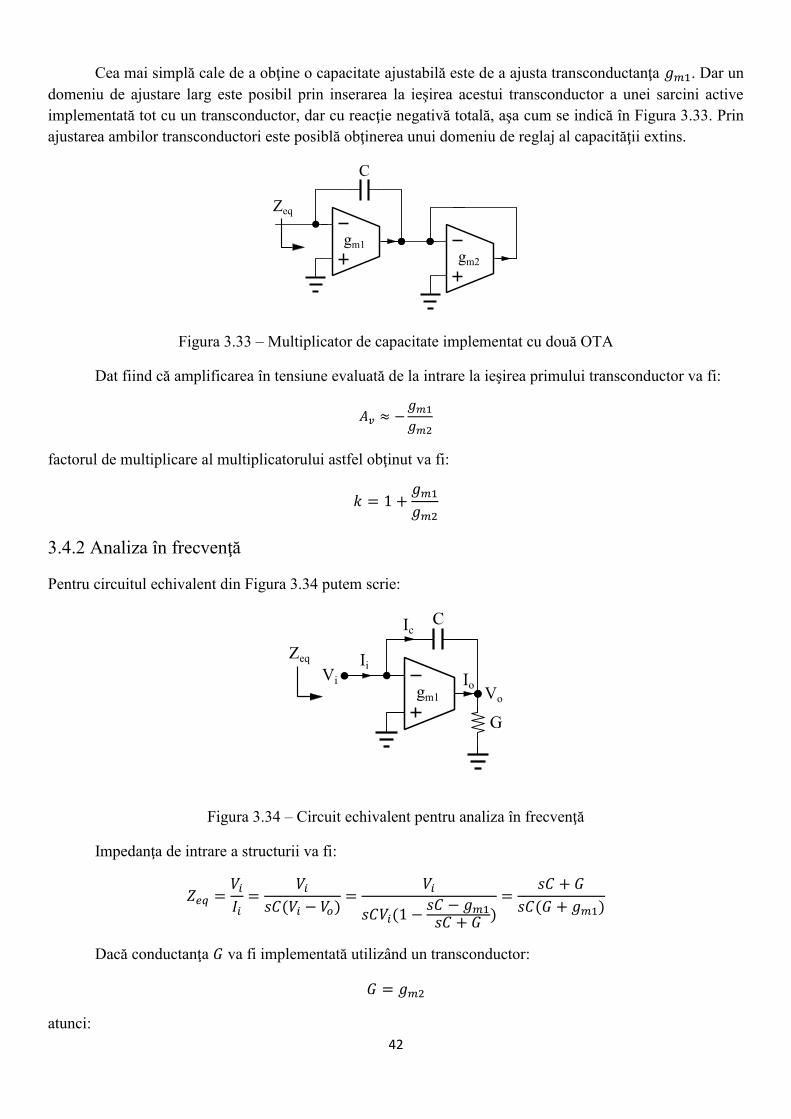
Cea mai simplă cale de a obţine o capacitate ajustabilă este de a ajusta transconductanţa . Dar un
domeniu de ajustare larg este posibil prin inserarea la ieşirea acestui transconductor a unei sarcini active
implementată tot cu un transconductor, dar cu reacţie negativă totală, aşa cum se indică în Figura 3.33. Prin
ajustarea ambilor transconductori este posiblă obţinerea unui domeniu de reglaj al capacităţii extins.
Figura 3.33 – Multiplicator de capacitate implementat cu două OTA
Dat fiind că amplificarea în tensiune evaluată de la intrare la ieşirea primului transconductor va fi:
factorul de multiplicare al multiplicatorului astfel obţinut va fi:
3.4.2 Analiza în frecvenţă
Pentru circuitul echivalent din Figura 3.34 putem scrie:
Figura 3.34 – Circuit echivalent pentru analiza în frecvenţă
Impedanţa de intrare a structurii va fi:
Dacă conductanţa va fi implementată utilizând un transconductor:
atunci:

43
(
*
Modelul echivalent al structurii propuse va fi:
Figura 3.35 – Model echivalent al structurii propuse, rezultat în urma analizei simplificate
Parametrii echivalenţi vor fi daţi de:
(
*
3.4.2 Analiza în frecvenţă considerând şi efectele neideale la intrarea şi ieşirea
transconductorilor
Luând în considerare şi efectele neideale, precum capacitătile de intrare/ieşire ca şi rezistenţa de
ieşire a transconductorilor, circuitul echivalent pentru analiza în frecvenţă devine:
Figura 3.36 – Circuit echivalent pentru analiza în frecvenţă considerând şi efectele neideale de la intrarea şi
ieşirea transconductorilor
Considerând următoarele notaţii:
circuitul echivalent devine:

44
Figura 3.37 – Circuit echivalent simplificat pentru analiza în frecvenţă
Neglijând capacitatea parazită de la intrarea primului transconductor, impedanţa de intrare a
structurii va fi:
Ultima relaţie arată că poate fi modelată cu următorul circuit echivalent:
Figura 3.38 – Model echivalent al impedanţei de intrare rezultat în urma analizei ce ia în calcul şi efectele
neideale la întrarea şi ieşirea transconductorilor
Parametrii echivalenţi vor fi daţi de:
(
*
(
*
unde
este componenta ajustabilă prin şi a factorului de multiplicare.
Legat de expresiile parametrilor echivalenţi, putem face câteva observaţii:

45
- Neglijând efectele neideale, şi , putem observa corespondenţa ultimelor relaţii
cu cele obţinute în urma analizei pe structura ce utiliza transconductori ideali:
(
*
- Pentru , influenţa lui este neglijabilă;
- Dat fiind că şi vor fi ajustate în sensuri diferite, şi deci nu vor fi mici simultan, influenţa lui
este neglijabilă pentru şi ;
- Expresia lui arată că devine important pentru factorul de multiplicare dacă ,
inducând un efect de limitare al ajustabilităţii;
3.4.3 Efectul transconductanţei
Aproximând dependenţa de frecvenţă a tranconductanţei printr-un model cu un singur pol:
componenta ajustabilă a factorului de multiplicare devine:
[ (
* ]
Considerând | | , putem aproxima , expresia lui devine:
(
*
(
* (
*
Dat fiind faptul că polii şi zerourile ultimei expresii sunt mult mai mari decât şi , expresia de
joasă frecvenţă a lui va fi:
(
*

46
Impedanţa echivalentă a capacităţii multiplicate poate fi scrisă ca:
Modelul de joasă frecvenţă al structurii propuse va fi:
Figura 3.39 – Model echivalent de joasă frecvenţă al structurii propuse
Expresiile parametrilor echivalenţi vor fi:
(
*
(
*
(
*
Putem face câteva observaţii asupra ultimelor relaţii:
- Dat fiind faptul că ,valoarea lui va fi foarte mică, astfel că va fi şuntat.
- Comportamentul capacitiv va fi păstrat până la frecvenţa dată de elementele dominante din modelul
echivalent în joasă frecvenţă:
47
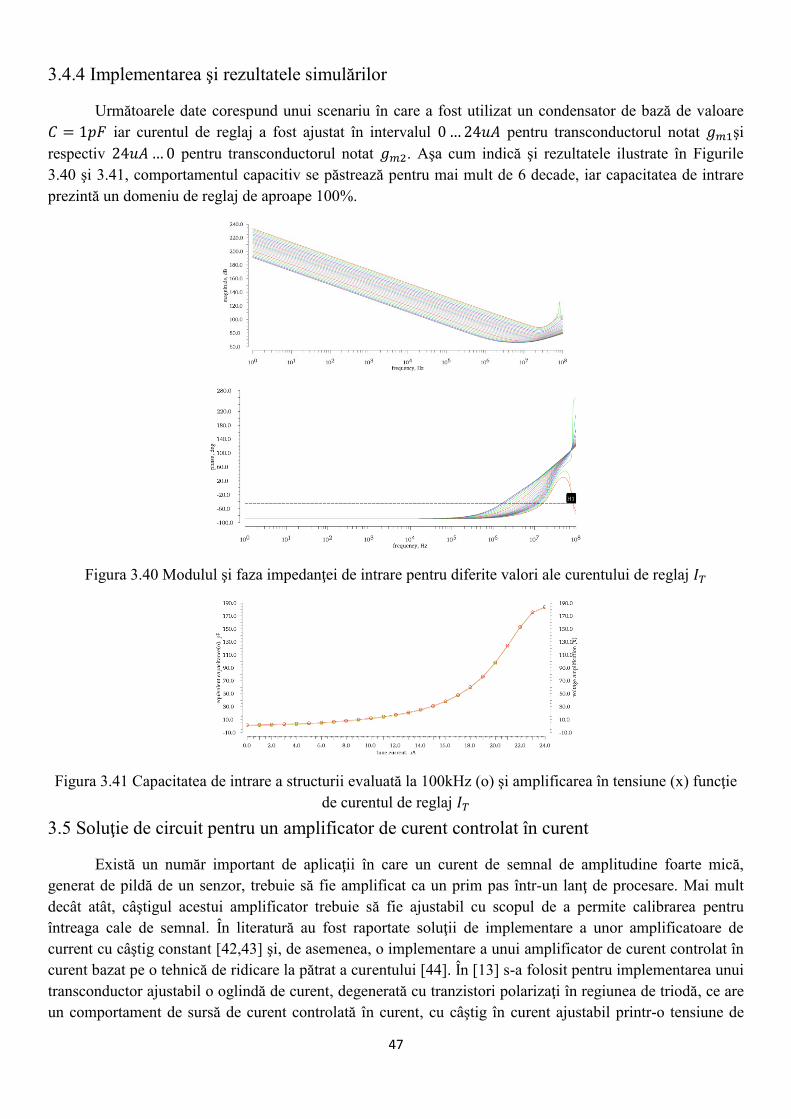
3.4.4 Implementarea şi rezultatele simulărilor
Următoarele date corespund unui scenariu în care a fost utilizat un condensator de bază de valoare
iar curentul de reglaj a fost ajustat în intervalul pentru transconductorul notat şi
respectiv pentru transconductorul notat . Aşa cum indică şi rezultatele ilustrate în Figurile
3.40 şi 3.41, comportamentul capacitiv se păstrează pentru mai mult de 6 decade, iar capacitatea de intrare
prezintă un domeniu de reglaj de aproape 100%.
Figura 3.40 Modulul şi faza impedanţei de intrare pentru diferite valori ale curentului de reglaj
Figura 3.41 Capacitatea de intrare a structurii evaluată la 100kHz (o) şi amplificarea în tensiune (x) funcţie
de curentul de reglaj
3.5 Soluţie de circuit pentru un amplificator de curent controlat în curent
Există un număr important de aplicaţii în care un curent de semnal de amplitudine foarte mică,
generat de pildă de un senzor, trebuie să fie amplificat ca un prim pas într-un lanţ de procesare. Mai mult
decât atât, câştigul acestui amplificator trebuie să fie ajustabil cu scopul de a permite calibrarea pentru
întreaga cale de semnal. În literatură au fost raportate soluţii de implementare a unor amplificatoare de
current cu câştig constant [42,43] şi, de asemenea, o implementare a unui amplificator de curent controlat în
curent bazat pe o tehnică de ridicare la pătrat a curentului [44]. În [13] s-a folosit pentru implementarea unui
transconductor ajustabil o oglindă de curent, degenerată cu tranzistori polarizaţi în regiunea de triodă, ce are
un comportament de sursă de curent controlată în curent, cu câştig în curent ajustabil printr-o tensiune de

48
control. Deşi un domeniu de reglaj relativ larg al amplificării de este posibil pentru această structură,
câştigul depinde de tensiunea de control printr-o funcţie neliniară. În continuare se va prezenta o soluţie de
amplificator de curent al cărui comportament rezultă din inducerea unui dezechilibru controlat pe bucla de
tensiuni grilă-sursă a unei oglinzi de curent.
3.5.1 Amplificatorul de curent propus
Amplificatorul ajustabil propus utilizează două instanţe ale oglinzii de curent dezechilibrate,
prezentate în secţiunea 3.2.1 şi Figura 3.13. S-a arătat că amplificarea de semnal mic a acestei structuri
indică un comportament de sursă de curent controlată în curent, cu câştig controlat de curentul injectat în
rezistorul de degenerare al capului de oglindă. Problema structurii este că şi componenta de curent continuu
injectată în tranzistorul cap de oglindă va fi amplificată. Mai mult decât atât, expresia amplificării pentru
componenta continuă diferă de cea corespunzătoare componentei de semnal mic. Pentru a depăşi acest
impediment, în [45] este propusă o structură ce foloseşte un circuit replică pentru a rejecta componenta
nedorită de curent continuu din ieşire, aşa cum se indică în Figura 3.42.
Figura 3.42 Amplificator de curent controlat în curent
Structura este o replică a structurii care va
amplifica doar componenta de curent continuu . În acest mod curentul prin tranzistorul va fi egal cu
componenta continuă a curentului prin .
Ieşirea a acestei oglinzi de curent cu câştig controlat în curent este aplicată oglinzii cu câştig
unitar implementată cu PMOS, , a cărei ieşire este conectată direct la ieşirea
amplificatorului. În acest mod componenta de curent continuu a curentului de ieşire este eliminată în
nodul de ieşire şi:
49
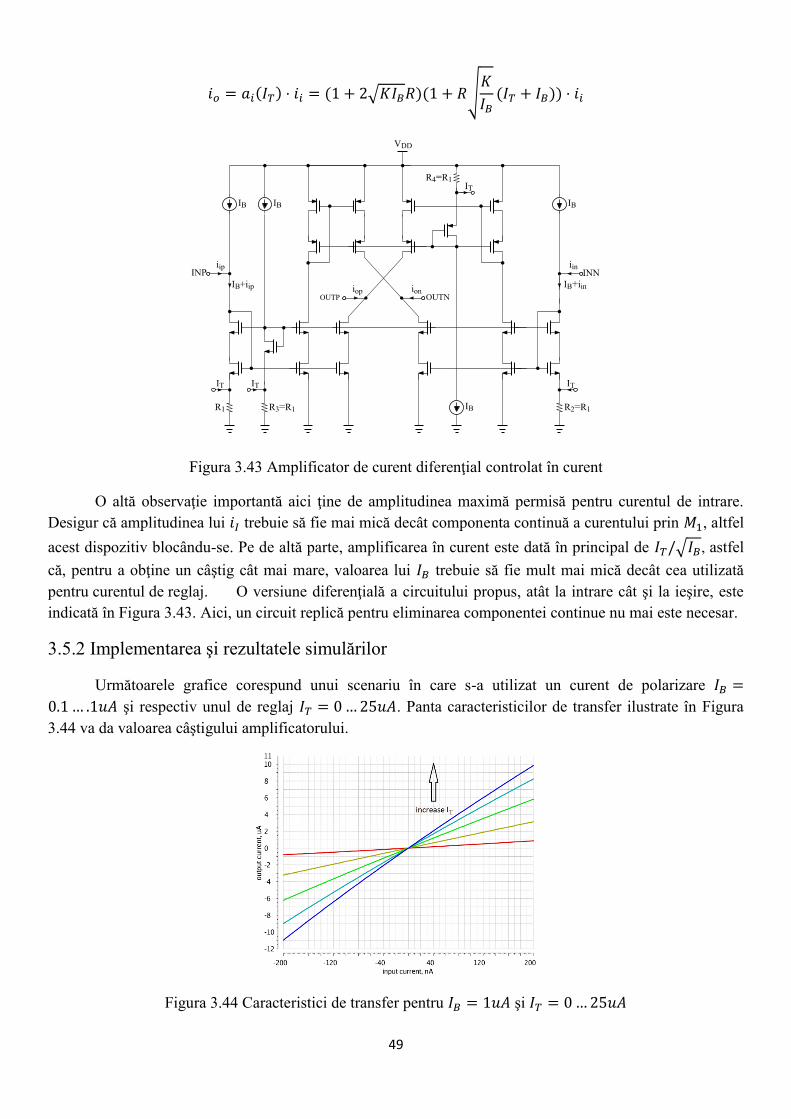
√ √
Figura 3.43 Amplificator de curent diferenţial controlat în curent
O altă observaţie importantă aici ţine de amplitudinea maximă permisă pentru curentul de intrare.
Desigur că amplitudinea lui trebuie să fie mai mică decât componenta continuă a curentului prin , altfel
acest dispozitiv blocându-se. Pe de altă parte, amplificarea în curent este dată în principal de √ , astfel
că, pentru a obţine un câştig cât mai mare, valoarea lui trebuie să fie mult mai mică decât cea utilizată
pentru curentul de reglaj. O versiune diferenţială a circuitului propus, atât la intrare cât şi la ieşire, este
indicată în Figura 3.43. Aici, un circuit replică pentru eliminarea componentei continue nu mai este necesar.
3.5.2 Implementarea şi rezultatele simulărilor
Următoarele grafice corespund unui scenariu în care s-a utilizat un curent de polarizare
şi respectiv unul de reglaj . Panta caracteristicilor de transfer ilustrate în Figura
3.44 va da valoarea câştigului amplificatorului.
Figura 3.44 Caracteristici de transfer pentru şi
50
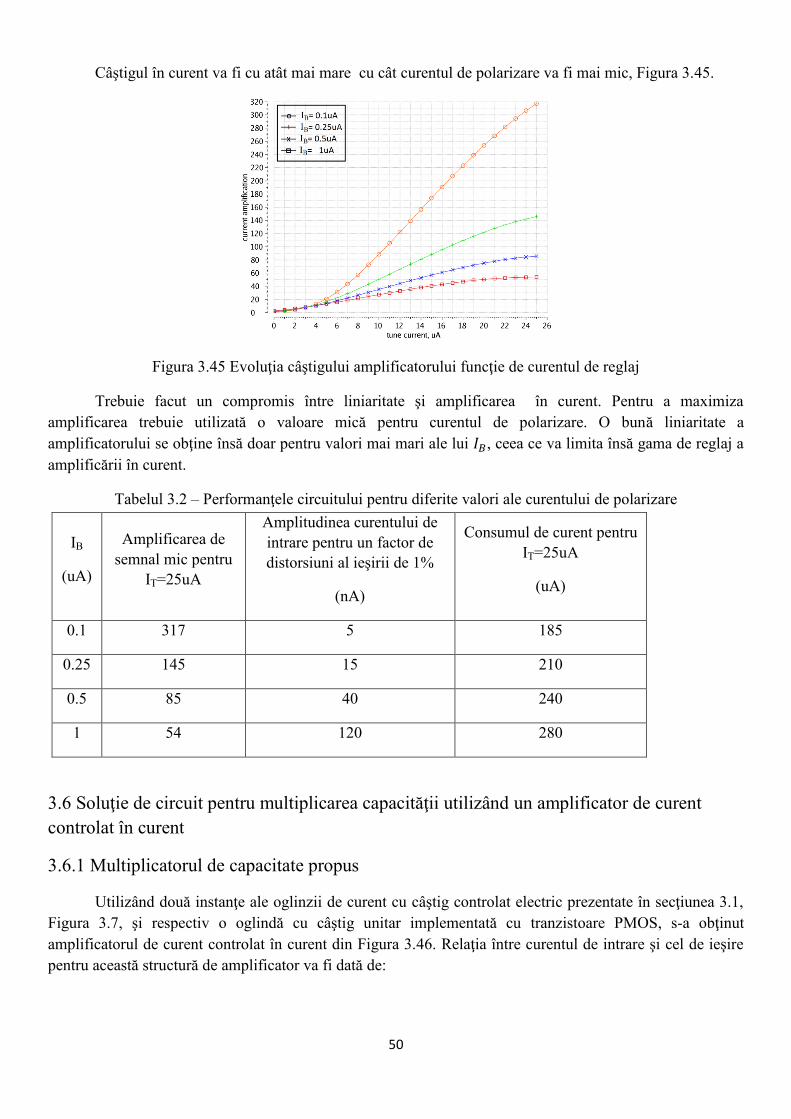
Câştigul în curent va fi cu atât mai mare cu cât curentul de polarizare va fi mai mic, Figura 3.45.
Figura 3.45 Evoluţia câştigului amplificatorului funcţie de curentul de reglaj
Trebuie facut un compromis între liniaritate şi amplificarea în curent. Pentru a maximiza
amplificarea trebuie utilizată o valoare mică pentru curentul de polarizare. O bună liniaritate a
amplificatorului se obţine însă doar pentru valori mai mari ale lui , ceea ce va limita însă gama de reglaj a
amplificării în curent.
Tabelul 3.2 – Performanţele circuitului pentru diferite valori ale curentului de polarizare
IB
(uA)
Amplificarea de
semnal mic pentru
IT=25uA
Amplitudinea curentului de
intrare pentru un factor de
distorsiuni al ieşirii de 1%
(nA)
Consumul de curent pentru
IT=25uA
(uA)
0.1 317 5 185
0.25 145 15 210
0.5 85 40 240
1 54 120 280
3.6 Soluţie de circuit pentru multiplicarea capacităţii utilizând un amplificator de curent
controlat în curent
3.6.1 Multiplicatorul de capacitate propus
Utilizând două instanţe ale oglinzii de curent cu câştig controlat electric prezentate în secţiunea 3.1,
Figura 3.7, şi respectiv o oglindă cu câştig unitar implementată cu tranzistoare PMOS, s-a obţinut
amplificatorul de curent controlat în curent din Figura 3.46. Relaţia între curentul de intrare şi cel de ieşire
pentru această structură de amplificator va fi dată de:

51
√
Figura 3.46 Amplificator de curent controlat în curent ce utilizează structura din Figura 3.7
Pentru a implementa multiplicatorul de capacitate, curentul printr-un condensator, pe care se aplica o
replică a tensiunii de intrare, trebuie detectat şi aplicat la intrarea amplificatorului de curent reprezentat în
Figura 3.46. Pentru aceasta s-a utilizat structura de repetor pe sursă propusă în [18], rezultând structura din
Figura 3.47. Bucla de reacţie negativă, care îi cuprinde pe şi , egalează curentul prin cu .
Aceeaşi buclă îmbunătăţeşte performanţele repetorului în tensiune , astfel că tensiunea pe condensator
este o replică fidelă a tensiunii de intrare.
Curentul prin va fi:
Acest curent va fi amplificat de structura , astfel că:
Circuitul replică va amplifica doar componenta continuă :
În nodul de intrare componenta continuă va fi eliminată, ramânând ca în intrare să avem un curent:

52
Figura 3.46 Multiplicator de capacitate ce utilizează oglinzi cu câştig controlat electric
Impedanţa de intrare rămâne să fie:
Partea stângă a circuitului reprezentat în Figura 3.46 indică modul în care pot fi generate ambele
polarităţi ale replicilor curentului de reglaj, necesare pentru a dezechilibra controlat oglinda de curent cu
câştig controlat electric. Aici, o tensiune de reglaj este utilizată pentru ajustarea amplificării în curent a
circuitului. Curentul va depinde liniar de această tensiune de reglaj pentru o plajă largă de variaţie a
acesteia.
3.6.2 Implementarea şi rezultatele simulărilor
Următoarele date corespund unui sccenariu în care a fost utilizat un condensator de bază de valoare
iar tensiunea de reglaj a fost ajustată în intervalul . Aşa cum indică şi
rezultatele ilustrate în Figurile 3.47 şi 3.48, capacitatea de intrare în structura propusă poate fi variată pentru
mai mult de 2 decade, rezultând un domeniu de reglaj de aproape 100%.
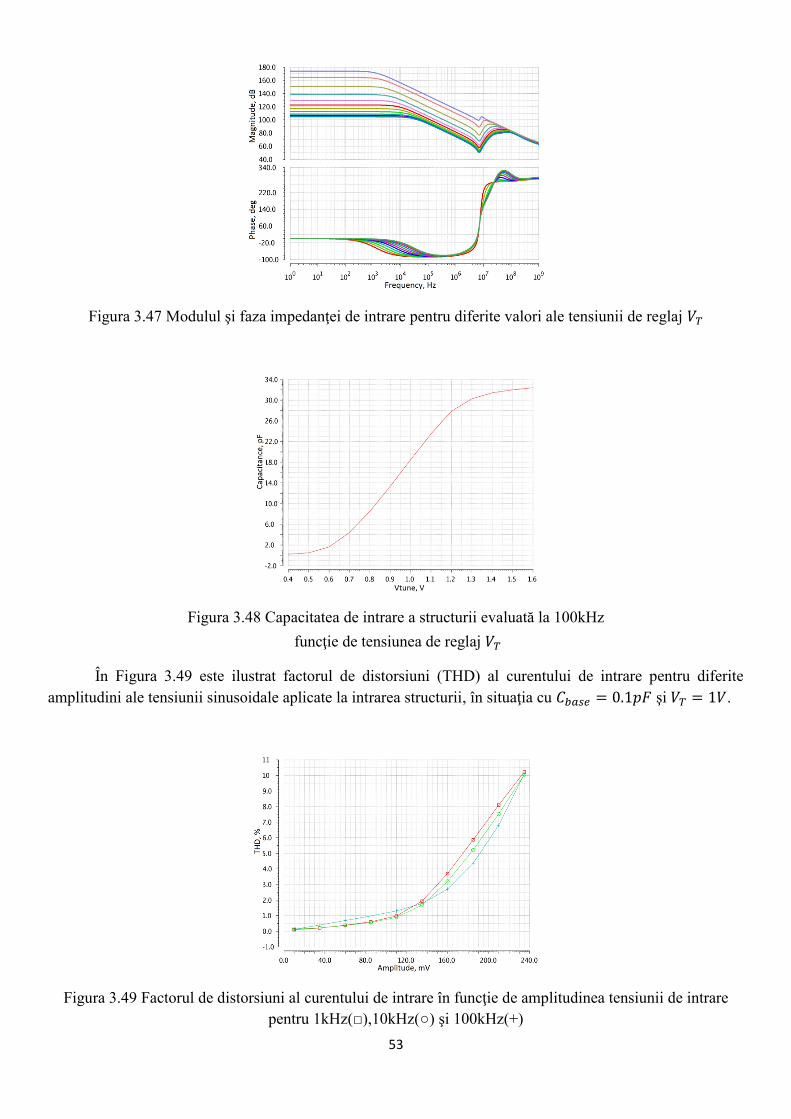
53
Figura 3.47 Modulul şi faza impedanţei de intrare pentru diferite valori ale tensiunii de reglaj
Figura 3.48 Capacitatea de intrare a structurii evaluată la 100kHz
funcţie de tensiunea de reglaj
În Figura 3.49 este ilustrat factorul de distorsiuni (THD) al curentului de intrare pentru diferite
amplitudini ale tensiunii sinusoidale aplicate la intrarea structurii, în situaţia cu şi .
Figura 3.49 Factorul de distorsiuni al curentului de intrare în funcţie de amplitudinea tensiunii de intrare
pentru 1kHz(),10kHz() şi 100kHz(+)

54
3.7 Soluţie de circuit pentru conversia de la condensator cu un terminal la masă la
condensator flotant
Multe circuite analogice de joasă frecvenţă utilizează condensatoare de cuplaj de valoare
mare şi, de obicei, tehnologiile CMOS oferă opţiuni de realizare a condensatoarelor flotante, dar, de cele mai
multe ori, aceastea induc şi unele dezavantaje: un consum uriaş de arie pe chip sau aceste dispozitive
flotante alterează performaţele dispozitivelor vecine, aşa cum este cazul condensatorului sandvici polisiliciu-
polisiliciu [18]. Ca urmare, proiectanţii de circuite analogice solicită existenţa unor circuite de conversie de
la condensator cu un terminal la masă la condensator flotant. La aceasta se adaugă şi necesitatea unui mod
de control, analogic sau digital, al capacităţii rezultate, caracteristică foarte utilă în multe aplicaţii.
Figura 3.50 Capacitatea unui condensator implementat cu N-MOS funcţie de tensiunea aplicată
De obicei, pentru a obţine o capacitate flotantă multiplicată, se porneşte tot de la un condensator de
bază flotant [47,48], dar, în acest mod, capacitatea electrică a condensatorului de bază este redusă iar aria
consumată ridicată datorită faptului că un tranzistor N-MOS în implementare flotantă necesită o difuzie
dedicată şi un contact la substrat dedicat. Există însă şi un număr de raportări în care s-a studiat
multiplicarea unui condensator cu terminal la masă. O arhitectură cu un repetor în tensiune de performanţă
ridicată este prezentat în [18], dar nu este oferită o soluţie de condensator echivalent flotant. Aceeaşi tehnică
a repetorului în tensiune este folosită în [49], dar condensatorul flotant echivalent se bazează pe existenţa
unuia flotant de bază. O implementare relativ sofisticată este prezentată în [20], dar aici factorul de
multiplicare este dat de radicalul unui raport a doi curenţi de polarizare, detaliu ce limitează drastic
domeniul de multiplicare.
3.7.1 Circuitul propus
Circuitul propus în [50], bazat pe principiul controlului impedanţei prin utilizarea unei tehnici de
scalare a curentului, utilizează o buclă de reacţie negativă şi un circuit replică, după cum se ilustrază în
Figura 3.51. Bucla de reacţie negativă, ce include amplificatorul operaţional şi tranzistorul , minimizează
tensiunea diferenţială de la intrarea amplificatorului operaţional. În consecinţă, tensiunea de intrare din
partea stângă a structurii şi căderea de tensiune de pe condensatorul de bază vor fi egale:
Componenta continuă a curentului prin tranzistorul este dată de sursa de curent constant iar
componenta de semnal de curentul prin condensator, , astfel că:
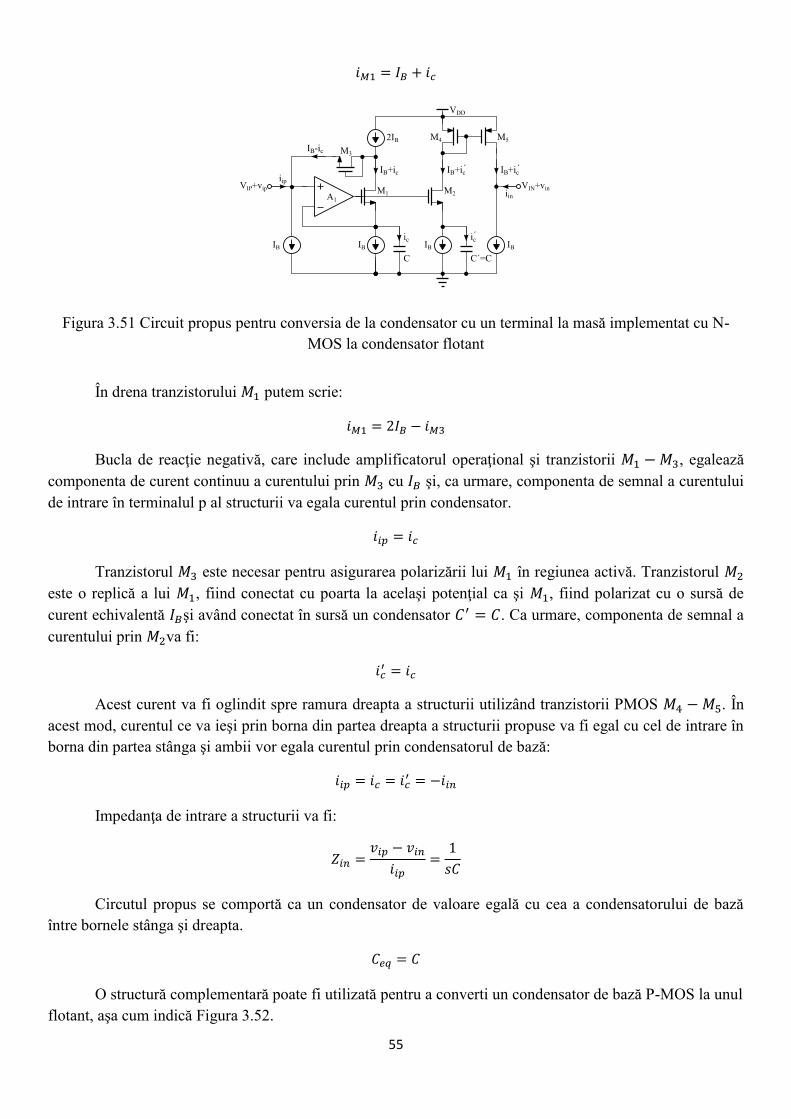
55
Figura 3.51 Circuit propus pentru conversia de la condensator cu un terminal la masă implementat cu N-
MOS la condensator flotant
În drena tranzistorului putem scrie:
Bucla de reacţie negativă, care include amplificatorul operaţional şi tranzistorii , egalează
componenta de curent continuu a curentului prin cu şi, ca urmare, componenta de semnal a curentului
de intrare în terminalul p al structurii va egala curentul prin condensator.
Tranzistorul este necesar pentru asigurarea polarizării lui în regiunea activă. Tranzistorul
este o replică a lui , fiind conectat cu poarta la acelaşi potenţial ca şi , fiind polarizat cu o sursă de
curent echivalentă şi având conectat în sursă un condensator . Ca urmare, componenta de semnal a
curentului prin va fi:
Acest curent va fi oglindit spre ramura dreapta a structurii utilizând tranzistorii PMOS . În
acest mod, curentul ce va ieşi prin borna din partea dreapta a structurii propuse va fi egal cu cel de intrare în
borna din partea stânga şi ambii vor egala curentul prin condensatorul de bază:
Impedanţa de intrare a structurii va fi:
Circutul propus se comportă ca un condensator de valoare egală cu cea a condensatorului de bază
între bornele stânga şi dreapta.
O structură complementară poate fi utilizată pentru a converti un condensator de bază P-MOS la unul
flotant, aşa cum indică Figura 3.52.
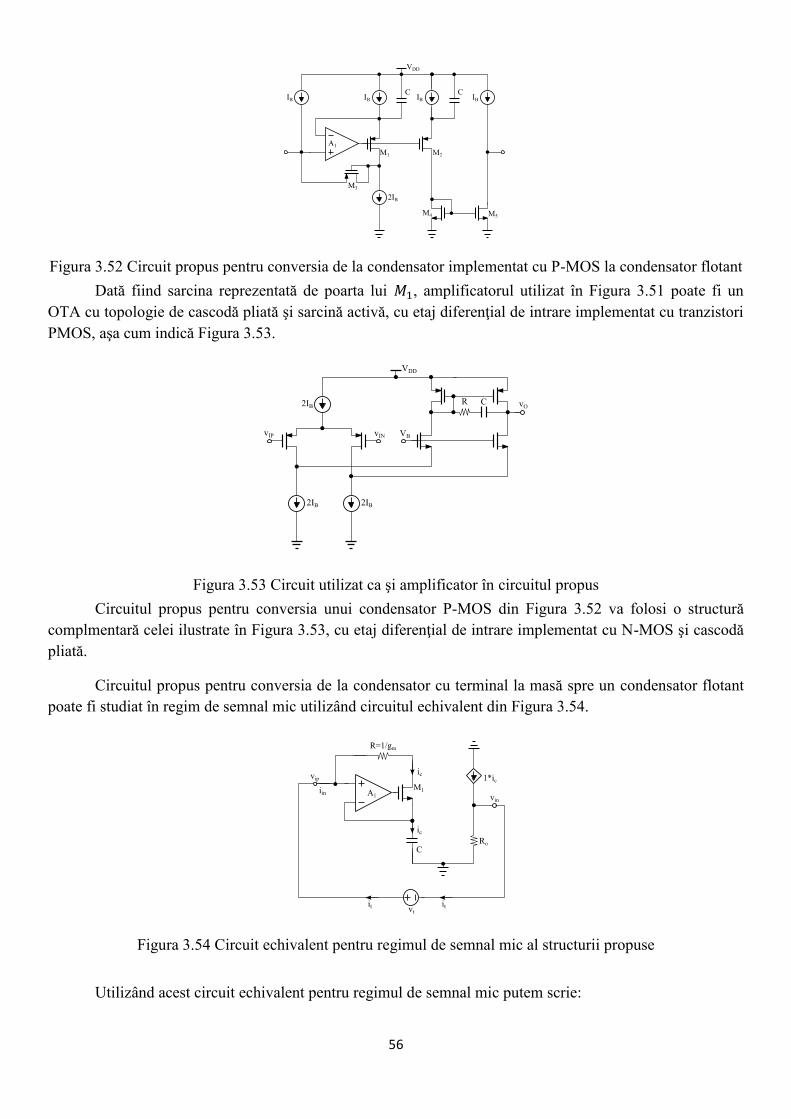
56
Figura 3.52 Circuit propus pentru conversia de la condensator implementat cu P-MOS la condensator flotant
Dată fiind sarcina reprezentată de poarta lui , amplificatorul utilizat în Figura 3.51 poate fi un
OTA cu topologie de cascodă pliată şi sarcină activă, cu etaj diferenţial de intrare implementat cu tranzistori
PMOS, aşa cum indică Figura 3.53.
Figura 3.53 Circuit utilizat ca şi amplificator în circuitul propus
Circuitul propus pentru conversia unui condensator P-MOS din Figura 3.52 va folosi o structură
complmentară celei ilustrate în Figura 3.53, cu etaj diferenţial de intrare implementat cu N-MOS şi cascodă
pliată.
Circuitul propus pentru conversia de la condensator cu terminal la masă spre un condensator flotant
poate fi studiat în regim de semnal mic utilizând circuitul echivalent din Figura 3.54.
Figura 3.54 Circuit echivalent pentru regimul de semnal mic al structurii propuse
Utilizând acest circuit echivalent pentru regimul de semnal mic putem scrie:
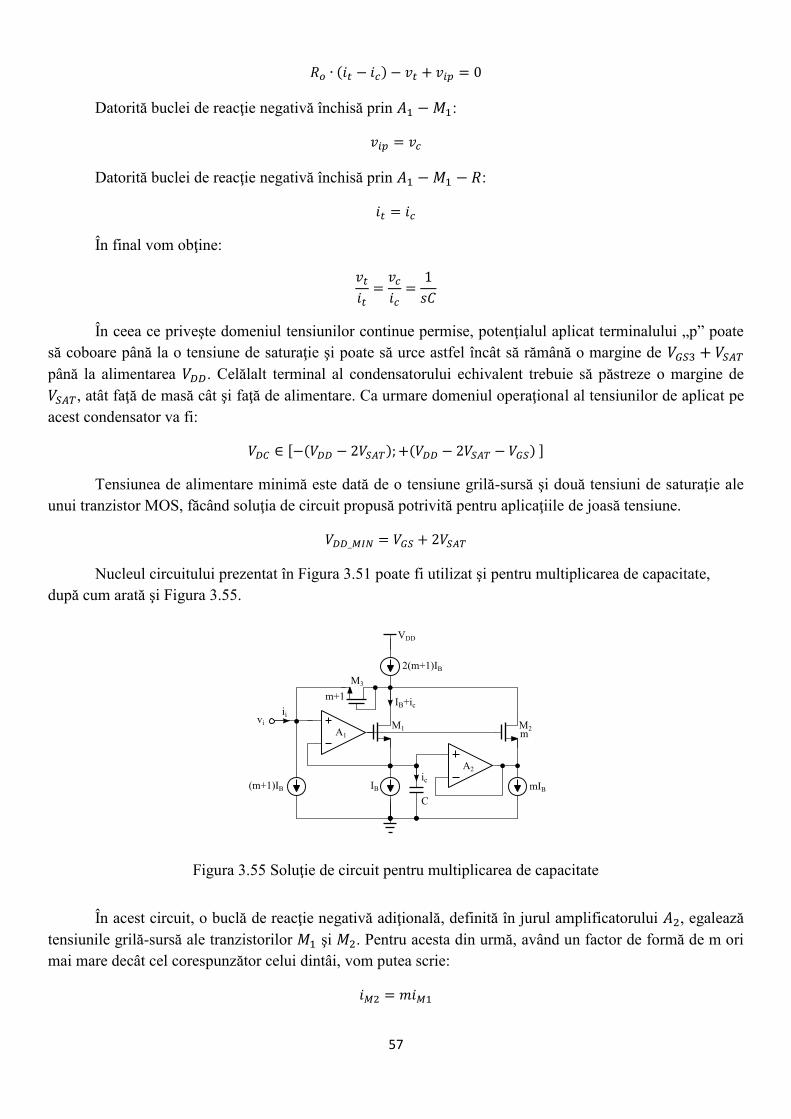
57
Datorită buclei de reacţie negativă închisă prin :
Datorită buclei de reacţie negativă închisă prin :
În final vom obţine:
În ceea ce priveşte domeniul tensiunilor continue permise, potenţialul aplicat terminalului „p‖ poate
să coboare până la o tensiune de saturaţie şi poate să urce astfel încât să rămână o margine de
până la alimentarea . Celălalt terminal al condensatorului echivalent trebuie să păstreze o margine de
, atât faţă de masă cât şi faţă de alimentare. Ca urmare domeniul operaţional al tensiunilor de aplicat pe
acest condensator va fi:
[ ]
Tensiunea de alimentare minimă este dată de o tensiune grilă-sursă şi două tensiuni de saturaţie ale
unui tranzistor MOS, făcând soluţia de circuit propusă potrivită pentru aplicaţiile de joasă tensiune.
Nucleul circuitului prezentat în Figura 3.51 poate fi utilizat şi pentru multiplicarea de capacitate,
după cum arată şi Figura 3.55.
Figura 3.55 Soluţie de circuit pentru multiplicarea de capacitate
În acest circuit, o buclă de reacţie negativă adiţională, definită în jurul amplificatorului , egalează
tensiunile grilă-sursă ale tranzistorilor şi . Pentru acesta din urmă, având un factor de formă de m ori
mai mare decât cel corespunzător celui dintâi, vom putea scrie:

58
Curentul de drenă al lui va fi:
Ca urmare curentul este trimis spre intrarea circuitului unde componenta continuă este
eliminată. În acest fel, curentul de intrare în circuitul propus va fi:
Impedanţa de intrare a circuitului va fi:
Aşadar circuitul se comportă ca un condensator cu un terminal la masă, multiplicat cu un factor de
:
Amplificatorul utilizat în multiplicatorul propus poate avea o arhitectură foarte simplă, de etaj
diferenţial cu sarcină activă urmat de un etaj sursă comună, aşa cum sugerează Figura 3.56.
Figura 3.56 Circuit utilizat pentru implementarea lui în multiplicatorul propus
Tensiunea aplicată la intrarea acestui multiplicator trebuie să respecte condiţiile:
[ ]
iar tensiunea minimă de alimentare va avea aceeaşi expresie cu cea definită pentru circuitul din Figura 3.51.
Combinând structurile din Figurile 3.51-3.56, putem obţine o capacitate multiplicată flotantă, aşa
cum se indică în Figura 3.57.
Figura 3.57 Implementarea unei capacitaţi flotante multiplicate
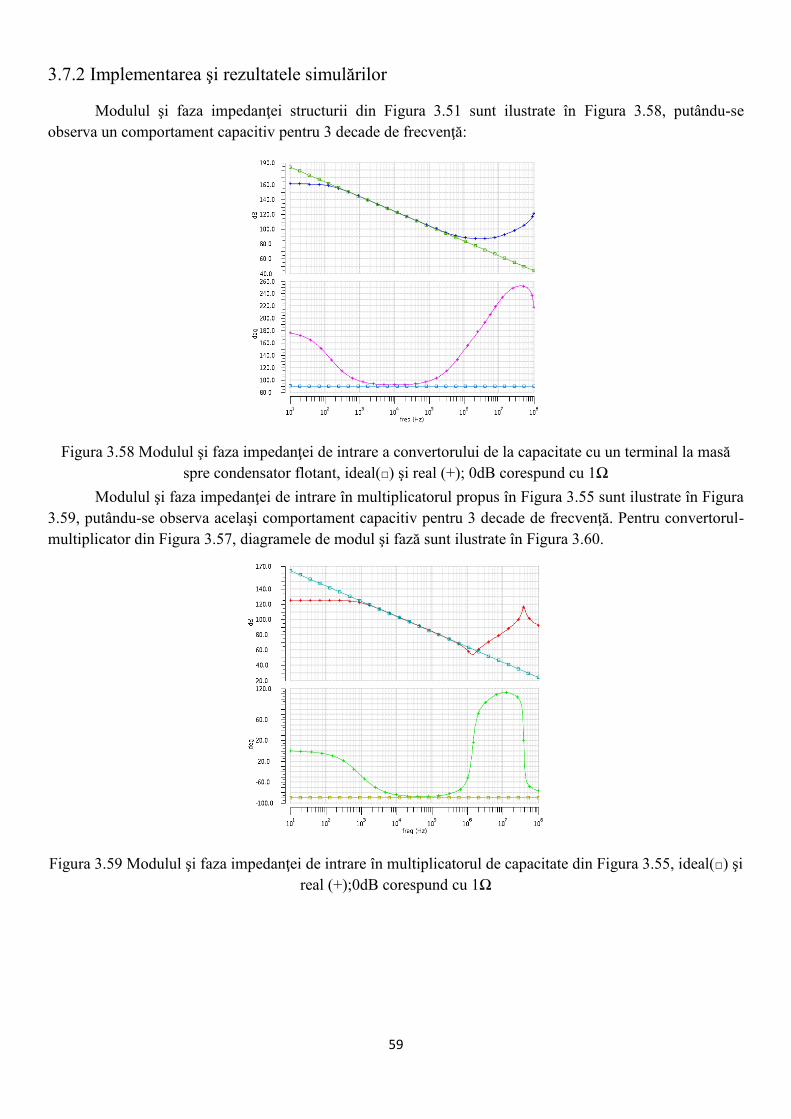
59
3.7.2 Implementarea şi rezultatele simulărilor
Modulul şi faza impedanţei structurii din Figura 3.51 sunt ilustrate în Figura 3.58, putându-se
observa un comportament capacitiv pentru 3 decade de frecvenţă:
Figura 3.58 Modulul şi faza impedanţei de intrare a convertorului de la capacitate cu un terminal la masă
spre condensator flotant, ideal() şi real (+); 0dB corespund cu 1Ω
Modulul şi faza impedanţei de intrare în multiplicatorul propus în Figura 3.55 sunt ilustrate în Figura
3.59, putându-se observa acelaşi comportament capacitiv pentru 3 decade de frecvenţă. Pentru convertorul-
multiplicator din Figura 3.57, diagramele de modul şi fază sunt ilustrate în Figura 3.60.
Figura 3.59 Modulul şi faza impedanţei de intrare în multiplicatorul de capacitate din Figura 3.55, ideal() şi
real (+);0dB corespund cu 1Ω
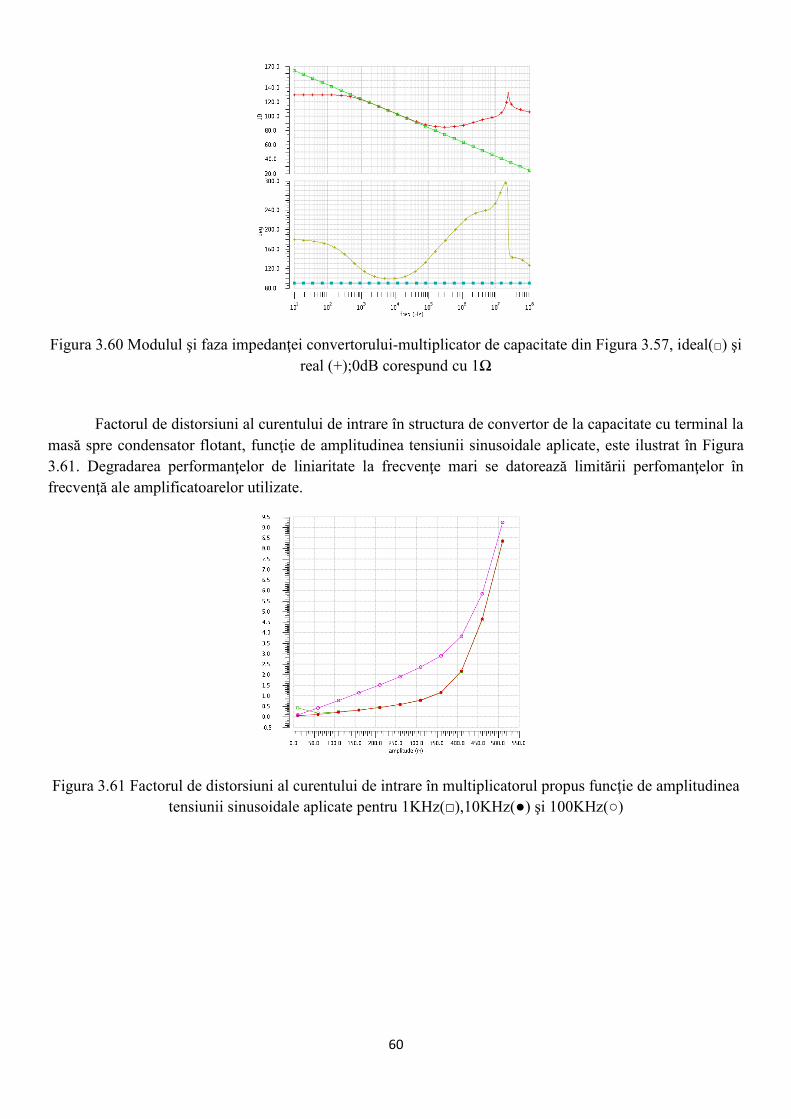
60
Figura 3.60 Modulul şi faza impedanţei convertorului-multiplicator de capacitate din Figura 3.57, ideal() şi
real (+);0dB corespund cu 1Ω
Factorul de distorsiuni al curentului de intrare în structura de convertor de la capacitate cu terminal la
masă spre condensator flotant, funcţie de amplitudinea tensiunii sinusoidale aplicate, este ilustrat în Figura
3.61. Degradarea performanţelor de liniaritate la frecvenţe mari se datorează limitării perfomanţelor în
frecvenţă ale amplificatoarelor utilizate.
Figura 3.61 Factorul de distorsiuni al curentului de intrare în multiplicatorul propus funcţie de amplitudinea
tensiunii sinusoidale aplicate pentru 1KHz(),10KHz() şi 100KHz()

61
4. Aplicaţii ale elementelor de circuit controlate electric propuse în
implementarea filtrelor analogice
4.1 Filtru trece jos de ordin 5 implementat cu amplificatorul transconductanţă prezentat în
secţiunea 3.2
4.1.1 Proiectarea parametrilor filtrului
Ca aplicaţie pentru amplificatorul transconductanţă prezentat în secţiunea 3.2 s-a proiectat un filtru
trece jos de ordin 5. Acesta a fost implementat ca o cascadă de secţiuni de ordin 1 şi 2, aşa cum se ilustrează
în Figura 4.1.
Figura 4.1 Secţiuni Gm-C trece jos de ordin 1 (stânga) şi 2 (drepta), utilizate în filtru
Toate instanţele amplificatorului transconductanţă au fost ajustate cu replici ale aceluiaşi curent de
reglaj, astfel că secţiunile 1 şi 2 vor implementa funcţiile de transfer:
Funcţia de transfer a filtrului de ordin 5, obţinut prin cascadarea unei secţiuni de ordin 1 şi a două
secţiuni de ordin 2, cu valori pentru capacităţile interschimbate, va fi dată de:
(
) (
* (
*
Tabelul 4.1 enumeră valorile necesare pentru capacităţi în cazul unei frecvenţe de tăiere nominale a
filtrului şi, respectiv, a unei transconductanţe nominale de 150uS, valori obţinute utilizând
funcţii Matlab.
Tabelul 4.1 – Valori ale capacităţilor pentru şi
Secţiunea filtrului Valorile capacităţilor [pF]
Secţiunea de ordin 1 C=8.96
Prima secţiune de ordin 2 C1=12.87 C2=4.91
A doua secţiune de ordin 2 C1’=C2=4.91 C2’=C1=12.87

62
4.1.2 Implementarea şi rezultatele simulărilor
Caracteristica de câştig a filtrului implementat, evoluţia frecvenţei de tăiere odată cu mărimea
curentului de control precum şi factorul de distorsiuni al tensiunii de ieşire, funcţie de amplitudinea tensiunii
aplicate la intrare, sunt reprezentate în Figurile 4.2, 4.3 şi 4.4.
Figura 4.2 Caracteristica de câştig a filtrului de ordin 5 la diferite valori ale curentului de reglaj în intervalul
Figura 4.3 Domeniul de ajustare al frecvenţei de tăiere:
Figura 4.4 Factorul de distorsiuni al tensiunii de ieşire, funcţie de amplitudinea tensiunii aplicate la intrare
4.2 Filtru trece jos de ordin 5 implementat cu amplificatorul transconductanţă prezentat în
secţiunea 3.3
4.2.1 Proiectarea parametrilor filtrului
Aceeaşi arhitectură de filtru de ordin 5, obţinută prin cascadarea a 3 secţiuni trece jos elementare de
ordin 1 şi 2, a fost proiectată ca aplicaţie pentru a doua soluţie de amplificator trnsconductanţă, prezentată în
secţiunea 3.3. De această dată însă s-au utilizat condensatoare flotante ( disponibile în tehnologia AMS
180nm), capacitatea totală necesară fiind acum de 4 ori mai mică. Structura secţiunilor elementare precum şi
cea a filtrului de ordin 5 corespund cu cele ilustrate în Figurile 2.24 ş 2.25. Expresiile funcţiilor de transfer
ITUNE

63
de ordin 1, 2 şi 5 corespund cu cele prezentate în secţiunea anterioară iar parametrii secţiunilor de filtru,
proiectaţi cu ajutorul funcţiilor Matlab pentru o frecvenţă de taiere şi o valoare medie a
transconductanţei de , sunt enumeraţi în tabelul 4.2.
Tabelul 4.2 – Parametrii secţiunilor filtrului pentru şi
Secţiunea
filtrului
gm
(IT=12.5uA)
C1
C2
Q
fc
1 92uS 7.31p - - 2MHz
2 92uS 11.82pF 4.51pF 1.62 2MHz
3 92uS 4.51pF 11.82pF 0.62 2MHz
Pentru notaţiile din Figura 2.25, expresiile simplificate ale câştigului de joasă frecvenţă, frecvenţei de
tăiere şi factorului de calitate pentru fiecare biquad sunt:
√
√
După cum ilustrează şi valorile enumerate în Tabelul 4.2, a doua şi a treia secţiune a filtrului au
factori de calitate diferiţi şi analiza efectuată a indicat avantajele ordinii de cascadare din punct de vedere al
zgomotului şi al neliniarităţii: biquadul de factor de calitate ridicat trebuie folosit ca al doilea etaj al filtrului
de ordin 5 iar cel cu factor de calitate redus drept ultimul.
4.2.2 Analiza de zgomot a secţiunilor filtrului
Analiza de zgomot s-a facut urmând metodologia prezentată în [51]. Pentru a determina zgomotul
echivalent referit la intrarea filtrului, va fi determinat şi referit la intrare efectul în ieşire al tuturor
contribuţiilor datorate transconductorilor individuali ai fiecărei secţiuni. Sursele echivalente de zgomot,
referite la intrare ale transconductorilor, sunt reprezentate în semicircuitul pentru modul diferenţial al
fiecărei secţiuni, aşa cum indică Figurile 4.5 şi 4.6, după care au fost determinate funcţiile de transfer pentru
fiecare dintre sursele de zgomot până la ieşire.
Figura 4.5 Semicircuit pe mod diferenţial pentru secţiunea de ordin 1, cu surse echivalente de zgomot
adăugate
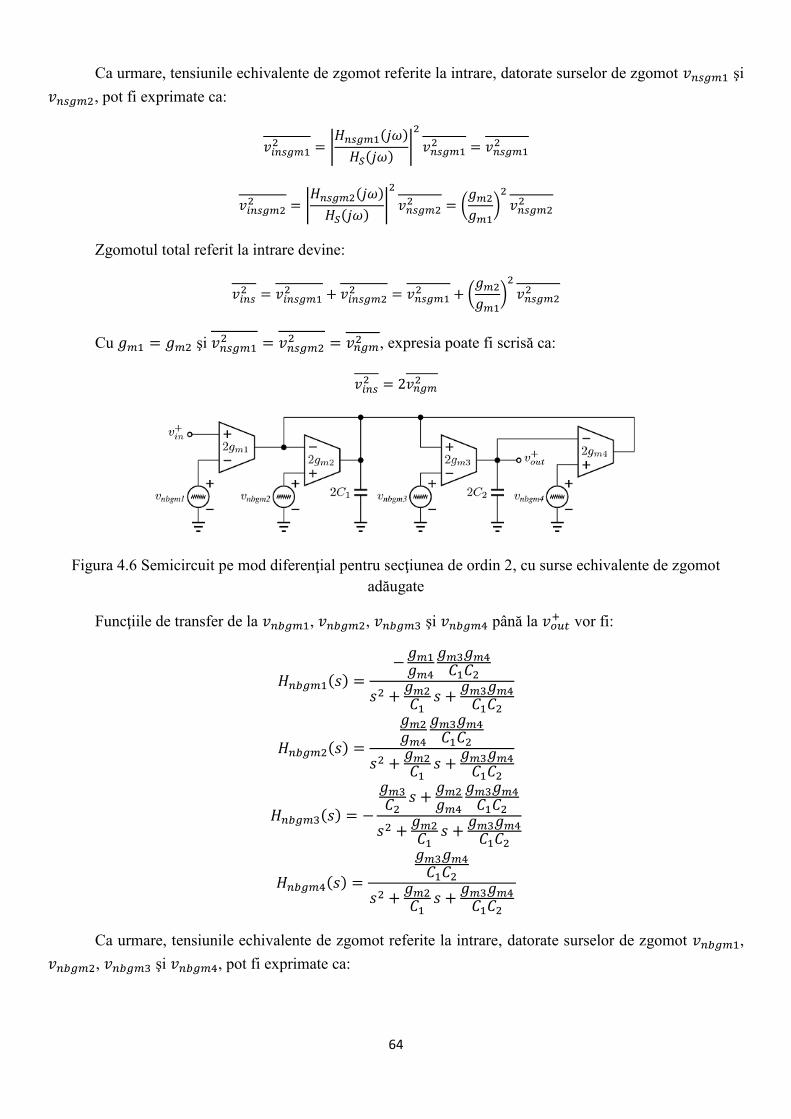
64
Ca urmare, tensiunile echivalente de zgomot referite la intrare, datorate surselor de zgomot şi
, pot fi exprimate ca:
|
|
|
|
(
*
Zgomotul total referit la intrare devine:
(
*
Cu şi
, expresia poate fi scrisă ca:
Figura 4.6 Semicircuit pe mod diferenţial pentru secţiunea de ordin 2, cu surse echivalente de zgomot
adăugate
Funcţiile de transfer de la , , şi până la vor fi:
Ca urmare, tensiunile echivalente de zgomot referite la intrare, datorate surselor de zgomot ,
, şi , pot fi exprimate ca:

65
|
|
|
|
(
*
|
|
[(
*
(
*
]
|
|
(
*
Zgomotul total referit la intrarea secţiunii devine:
(
*
[(
*
(
*
] (
*
Cu şi
, expresia poate fi
scrisă ca:
[ (
*
] [ (
*
]
În banda filtrului, pentru , zgomotul total referit la intrare este suma tensiunilor
echivalente de zgomot referite la intrarea fiecareia dintre secţiuni deoarece câştigul fiecarei
secţiuni este unitar. Drept urmare:
4.2.3 Implementarea şi rezultatele simulărilor
Caracteristica de câştig a filtrului implementat în tehnologia AMS 180nm, evoluţia frecvenţei de
tăiere odată cu mărimea curentului de control precum şi factorul de distorsiuni al tensiunii de ieşire, funcţie
de amplitudinea tensiunii aplicate la intrare, sunt reprezentate în Figurile 4.7, 4.8 şi 4.9.
Figura 4.7 Caracteristica de câştig a filtrului de ordin 5, la diferite valori ale curentului de reglaj în intervalul
ITUNE

66
Figura 4.8 Domeniul de ajustare al frecvenţei de tăiere:
Figura 4.9 Factorul de distorsiuni al tensiunii de ieşire, funcţie de amplitudinea tensiunii aplicate la intrare
Valoarea pătratică a zgomotului echivalent reflectat la intrarea filtrului este ilustrată în Figura 4.10.
Se observă că, dincolo de frecvenţa 1/f, valoarea pătratică a zgomotului este de aproximativ ,
valoare ce corespunde cu rezultatele analizei teoretice prezentate anterior: această valoare este
de aproximativ 10 ori mai mare decât cea corespunzătoare valorii patratice a zgomotului
reflectat la intrarea unei instanţe de amplificator transconductanţă.
Figura 4.10 Valoarea pătratică a zgomotului echivalent reflectat la intrarea filtrului pentru cele două
topologii posibile: cascada Q mic – Q mare () şi Q mare - Q mic (x)
4.3 Implementarea unui element inductiv controlat electric şi utilizarea acestuia într-un filtru
trece bandă de ordin 2
Implementarea fără bobine a filtrelor, prin utilizarea reţelelor active RC, este o abordare
dezavantajoasă, dat fiind că acest tip de circuite este mult mai sensibil la toleranţa componentelor în
comparaţie cu filtrele LC convenţionale. În acest fel, substituirea bobinei cu o pereche girator-condensator
pare o soluţie atractivă pentru implementarea filtrelor active [52]. Există preocupări în literatură pentru
identificarea soluţiilor de implementare a elementelor inductive ajustabile. Astfel, în [53] este prezentată o

67
implementare de inductor activ ce poate fi ajustat între 294nH şi 394nH, cu aplicaţie în filtrele-trece bandă şi
oscilatoare. O altă abordare, ce promite posibilitatea de ajustare a inductanţei de la 10nH la 60nH, este
prezentată în [54]. În continuare se va prezenta o soluţie de inductor activ cu un domeniu de reglaj de peste 2
decade.
4.3.1 Implementarea unui element inductiv cu ajutorul amplificatorului transconductanţă
prezentat în secţiunea 3.2
O altă aplicaţie pentru amplificatorul transconductor prezentat în secţiunea 3.2 este realizarea unui
element de circuit cu comportament inductiv, pe principiul girator-condensator, aşa cum este ilustrat în
Figura 4.11.
Figura 4.11 Implementarea girator-condensator a inductanţei active
Pentru structura girator-condensator prezentată în Figura 4.11, expresiile simplificate ale inductanţei
şi respectiv frecvenţei de rezonanţă vor fi date de următoarele relaţii:
√
√
unde şi sunt transconductanţele celor două instanţe ale structurii de amplificator transconductanţă
prezentate în secţiunea 3.2, este capacitatea condensatorului utilizat pentru implementarea
inductorului activ iar este capacitatea parazită totală din intrarea giratorului.
O analiză în frecvenţă a structurii propuse pentru implementarea unei inductanţe active se poate face
pe circuitul echivalent de semnal mic al semicircuitului pe mod diferenţial prezentat în Figura 4.12.
Figura 4.12 Circuit echivalent de semnal mic a semicircuitului pe mod diferenţial
Impedanţa echivalentă de intrare în structura inductorului activ poate fi evaluată ca:

68
(
*
(
* (
*
Să considerăm circuitul echivalent al inductorului activ din Figura 4.13.
Figura 4.13 Circuit echivalent al inductorului activ
Dat fiind că , urmează:
( ) (
*
Comparând direct expresiile impedanţelor de intrare ale inductorului activ şi respectiv ale modelului
echivalent, putem determina următorii parametri echivalenţi:
Utilizând expresiile parametrilor echivalenţi, putem evalua factorul de calitate al inductorului activ:
Pentru o frecvenţă de , este de aşteptat o valoare a factorului de calitate de numai ,
dar, în secţiunea următoare, va fi aplicată o metodă de îmbunătăţire a factorului de calitate al unui filtru în
care este instanţiat inductorul activ prezentat.
Aşa cum s-a prezentat în analiza din secţiunea 2.10, pentru o plajă îngustă de frecvenţe, circuitul
echivalent al inductorului activ din Figura 4.13 poate fi transformat într-o topologie echivalentă prin
convertirea ramurii serie într-o configuraţie paralel:

69
Dat fiind că şi deci , expresiile devin:
Modelul echivalent al inductorului activ devine cel reprezentat în Figura 4.14, unde rezistorul paralel
nu mai este reprezentat dat fiind ca este mult mai mare decât .
Figura 4.14 Model echivalent paralel al inductorului activ
4.3.2 Implementarea unui filtru trece bandă de ordin 2
Utilizând încă o instanţă a transconductorului ajustabil prezentat în secţiunea 3.2 şi un condensator
adiţional, poate fi obţinut un filtru trece bandă generic de ordin doi, aşa cum o ilustrează Figura 4.15.
Transconductorul adiţional este necesar pentru a asigura o impedanţă de intrare ridicată pentru filtru.
Spre a calcula factorul de calitate al filtrului, este necesar ca, mai întâi, să evaluăm impedanţa caracteristică:
√
√
√
Figura 4.15 Filtru trece bandă generic de ordin doi
unde este capacitate condensatorului filtrului.
Factorul de calitate al filtrului va fi evaluat luând în consideraţie rezistenţa paralel totală a acestuia:
Pentru a îmbunătăţi factorul de calitate al filtrului, singura soluţie este creşterea . Acest lucru este
posibil prin inserarea unei rezistenţe negative, utilizând o instanţă aditională a transconductorului ajustabil în
configuraţia specifică implementării rezistenţei negative, aşa cum este indicat în Figura 4.16.

70
Figura 4.16 Filtru trece bandă de ordin doi, îmbunătăţit
Rezistenţa echivalentă paralel a filtrului devine:
Ultimele relaţii indică faptul că este posibilă obţinerea unei valori imbunătăţite pentru factorul de
calitate al filtrului, prin reglajul independent al amplificatoarelor transconductanţă din structura ilustrată de
Figura 4.16.
√
√ [
]
Dat fiind că , urmează:
√
√
Factorul de calitate al filtrului va fi maximizat pentru:
Funcţia de transfer a filtrului trece bandă de ordin 2 este dată de următoarea relaţie:
unde [ ].
Condiţia de stabilitate va fi:
Optimizarea factorului de calitate al filtrului se poate face ajustând atâta timp cât polii rămân în
semiplanul stâng, deci atât timp cât condiţia de mai sus este îndeplinită.
4.3.3 Implementarea şi rezultatele simulărilor
Rezultatele simulărilor unei implementări în tehnologia AMS 180nm indică posibilitatea ajustării
inductorului activ în domeniul 1mH...450mH, aşa cum se arată în Figura 4.17.

71
Figura 4.17 Domeniul de ajustare al inductorului activ
Modulul şi faza impedanţei de intrare în inductorul activ sunt zugrăvite în Figura 4.18.
Figura 4.18 Modulul şi faza impedanţei de intrare în inductorul activ
Frecvenţa centrală a filtrului trece bandă de ordin 2 funcţie de curentul de reglaj al inductorului activ,
în situaţia valorii minime a transconductanţei amplificatorului ce implementează rezistenţa negativă, este
zugrăvită în Figura 4.19.
Figura 4.19 Frecvenţa centrală a filtrului trece bandă de ordin 2, funcţie de curentul de reglaj al inductorului
activ
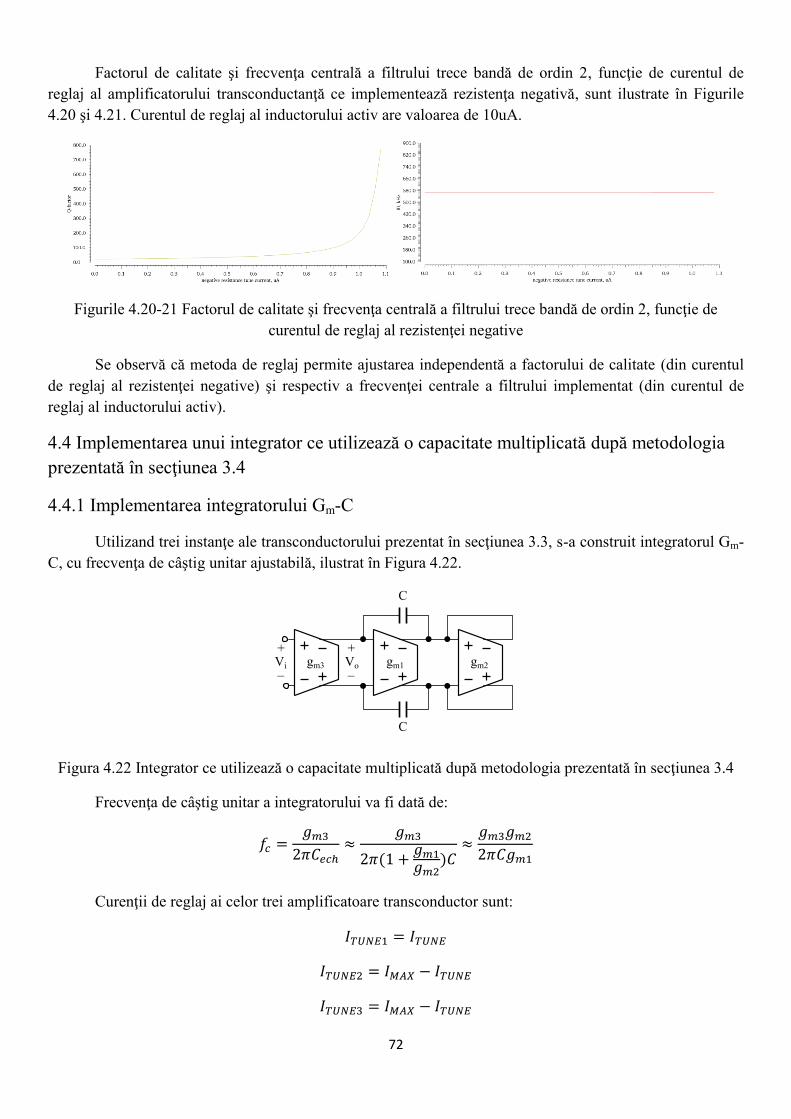
72
Factorul de calitate şi frecvenţa centrală a filtrului trece bandă de ordin 2, funcţie de curentul de
reglaj al amplificatorului transconductanţă ce implementează rezistenţa negativă, sunt ilustrate în Figurile
4.20 şi 4.21. Curentul de reglaj al inductorului activ are valoarea de 10uA.
Figurile 4.20-21 Factorul de calitate şi frecvenţa centrală a filtrului trece bandă de ordin 2, funcţie de
curentul de reglaj al rezistenţei negative
Se observă că metoda de reglaj permite ajustarea independentă a factorului de calitate (din curentul
de reglaj al rezistenţei negative) şi respectiv a frecvenţei centrale a filtrului implementat (din curentul de
reglaj al inductorului activ).
4.4 Implementarea unui integrator ce utilizează o capacitate multiplicată după metodologia
prezentată în secţiunea 3.4
4.4.1 Implementarea integratorului Gm-C
Utilizand trei instanţe ale transconductorului prezentat în secţiunea 3.3, s-a construit integratorul Gm-
C, cu frecvenţa de câştig unitar ajustabilă, ilustrat în Figura 4.22.
Figura 4.22 Integrator ce utilizează o capacitate multiplicată după metodologia prezentată în secţiunea 3.4
Frecvenţa de câştig unitar a integratorului va fi dată de:
Curenţii de reglaj ai celor trei amplificatoare transconductor sunt:

73
Expresia frecvenţei de câştig unitar funcţie de curentul de reglaj va fi:
4.4.2 Implementarea şi rezultatele simulărilor
Rezultatele simulărilor unei implementări în tehnologia AMS 180nm arată posibilitatea ajustării
frecvenţei de câştig unitar a integratorului într-un domeniu de 4 decade, aşa cum se arată în Figura 4.23.
Curentul de reglaj a fost variat intre 5uA şi 25uA pentru amplificatorul notat şi respectiv între 25uA şi
5uA pentru amplificatoarele notate şi .
Figura 4.23 Evoluţia frecvenţei de câştig unitar a integratorului în funcţie de curentul de reglaj
Figura 4.24 ilustrează caracteristica de câştig a integratorului pentru diferite valori ale curentului de
reglaj. Răspunsul în timp, la o serie de trepte de tensiune aplicate la intrarea integratorului, este ilustrat în
Figura 4.25
Figura 4.24 Caracteristica de câştig a integratorului pentru diferite valori ale curentului de reglaj din
intervalul 5uA...25uA
Figura 4.25 Răspunsul în timp la o serie de trepte de tensiune aplicate la intrarea integratorului
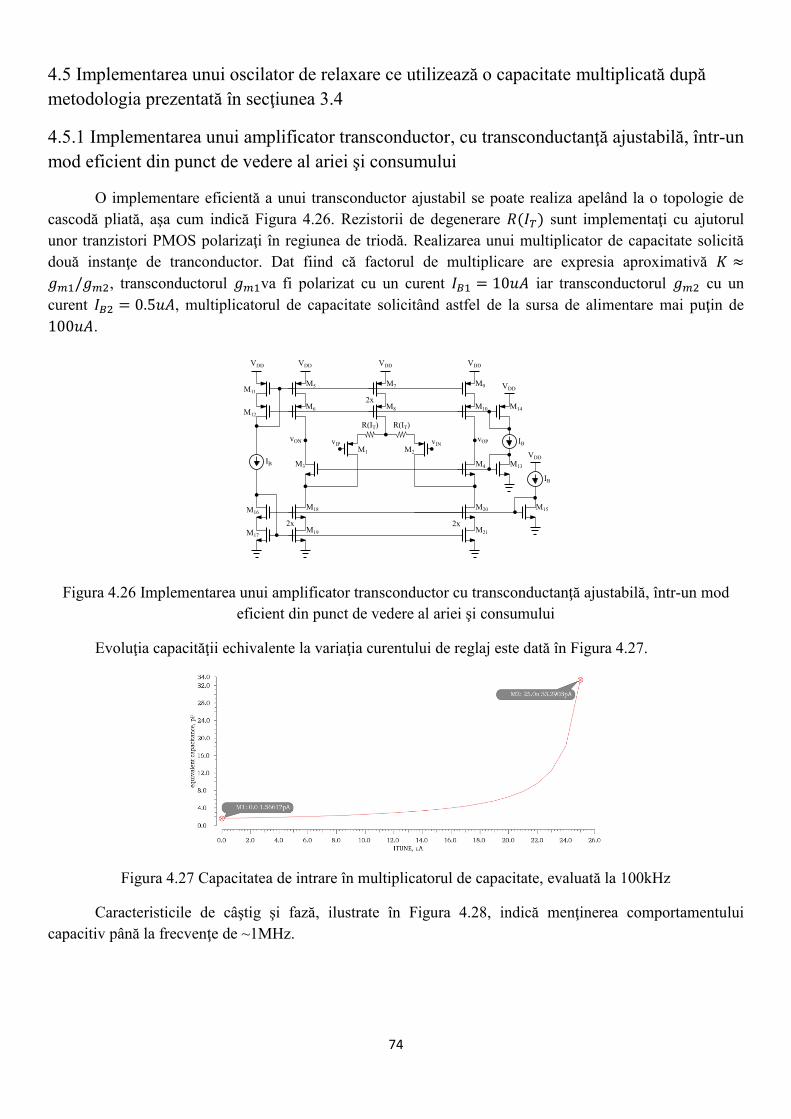
74
4.5 Implementarea unui oscilator de relaxare ce utilizează o capacitate multiplicată după
metodologia prezentată în secţiunea 3.4
4.5.1 Implementarea unui amplificator transconductor, cu transconductanţă ajustabilă, într-un
mod eficient din punct de vedere al ariei şi consumului
O implementare eficientă a unui transconductor ajustabil se poate realiza apelând la o topologie de
cascodă pliată, aşa cum indică Figura 4.26. Rezistorii de degenerare sunt implementaţi cu ajutorul
unor tranzistori PMOS polarizaţi în regiunea de triodă. Realizarea unui multiplicator de capacitate solicită
două instanţe de tranconductor. Dat fiind că factorul de multiplicare are expresia aproximativă
, transconductorul va fi polarizat cu un curent iar transconductorul cu un
curent , multiplicatorul de capacitate solicitând astfel de la sursa de alimentare mai puţin de
.
Figura 4.26 Implementarea unui amplificator transconductor cu transconductanţă ajustabilă, într-un mod
eficient din punct de vedere al ariei şi consumului
Evoluţia capacităţii echivalente la variaţia curentului de reglaj este dată în Figura 4.27.
Figura 4.27 Capacitatea de intrare în multiplicatorul de capacitate, evaluată la 100kHz
Caracteristicile de câştig şi fază, ilustrate în Figura 4.28, indică menţinerea comportamentului
capacitiv până la frecvenţe de ~1MHz.
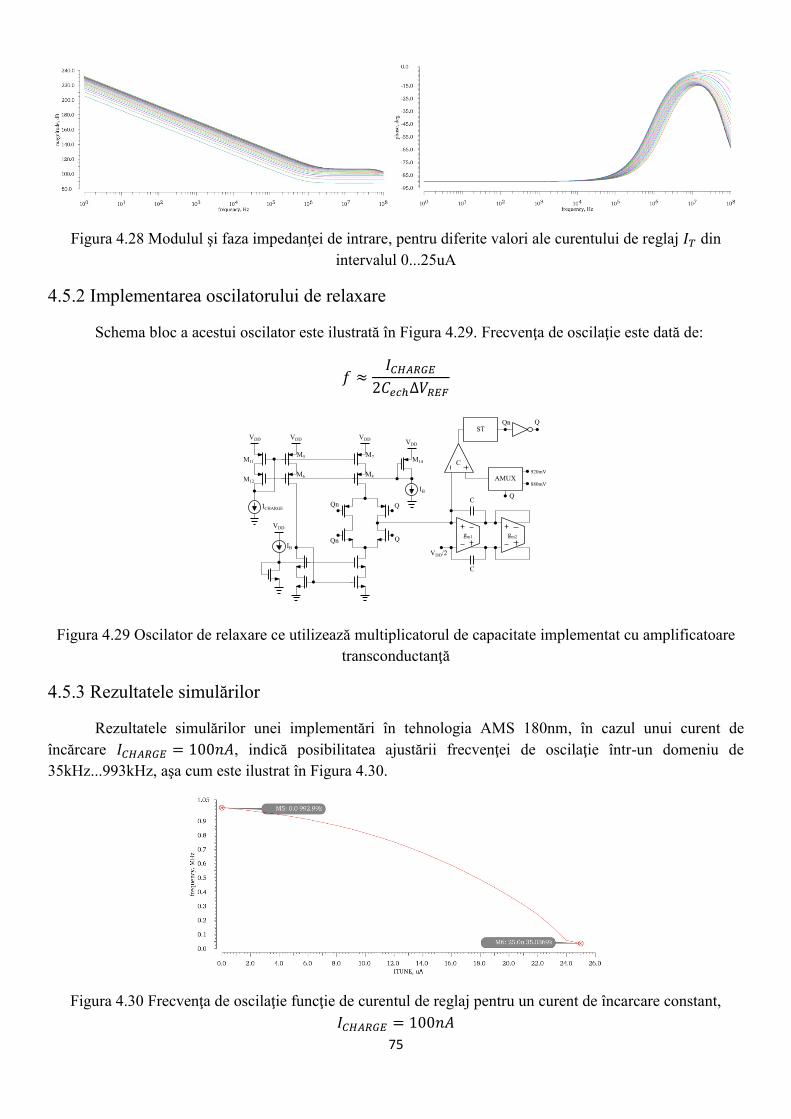
75
Figura 4.28 Modulul şi faza impedanţei de intrare, pentru diferite valori ale curentului de reglaj din
intervalul 0...25uA
4.5.2 Implementarea oscilatorului de relaxare
Schema bloc a acestui oscilator este ilustrată în Figura 4.29. Frecvenţa de oscilaţie este dată de:
Figura 4.29 Oscilator de relaxare ce utilizează multiplicatorul de capacitate implementat cu amplificatoare
transconductanţă
4.5.3 Rezultatele simulărilor
Rezultatele simulărilor unei implementări în tehnologia AMS 180nm, în cazul unui curent de
încărcare , indică posibilitatea ajustării frecvenţei de oscilaţie într-un domeniu de
35kHz...993kHz, aşa cum este ilustrat în Figura 4.30.
Figura 4.30 Frecvenţa de oscilaţie funcţie de curentul de reglaj pentru un curent de încarcare constant,
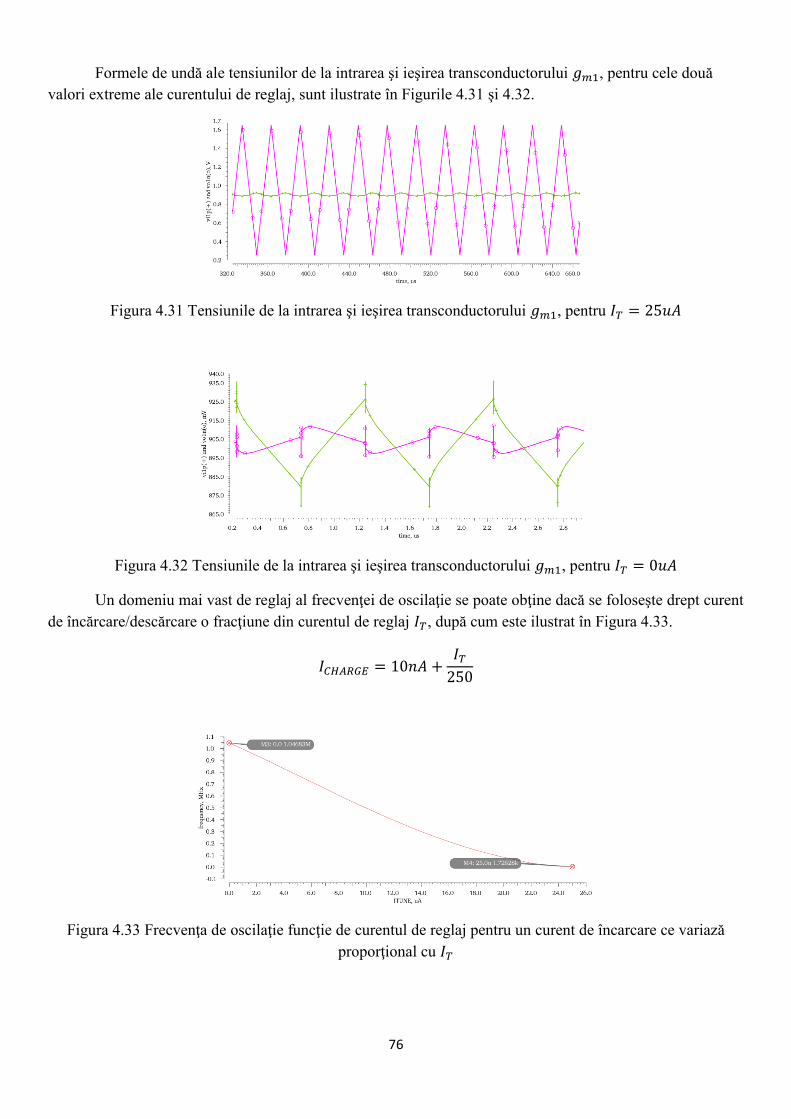
76
Formele de undă ale tensiunilor de la intrarea şi ieşirea transconductorului , pentru cele două
valori extreme ale curentului de reglaj, sunt ilustrate în Figurile 4.31 şi 4.32.
Figura 4.31 Tensiunile de la intrarea şi ieşirea transconductorului , pentru
Figura 4.32 Tensiunile de la intrarea şi ieşirea transconductorului , pentru
Un domeniu mai vast de reglaj al frecvenţei de oscilaţie se poate obţine dacă se foloseşte drept curent
de încărcare/descărcare o fracţiune din curentul de reglaj , după cum este ilustrat în Figura 4.33.
Figura 4.33 Frecvenţa de oscilaţie funcţie de curentul de reglaj pentru un curent de încarcare ce variază
proporţional cu
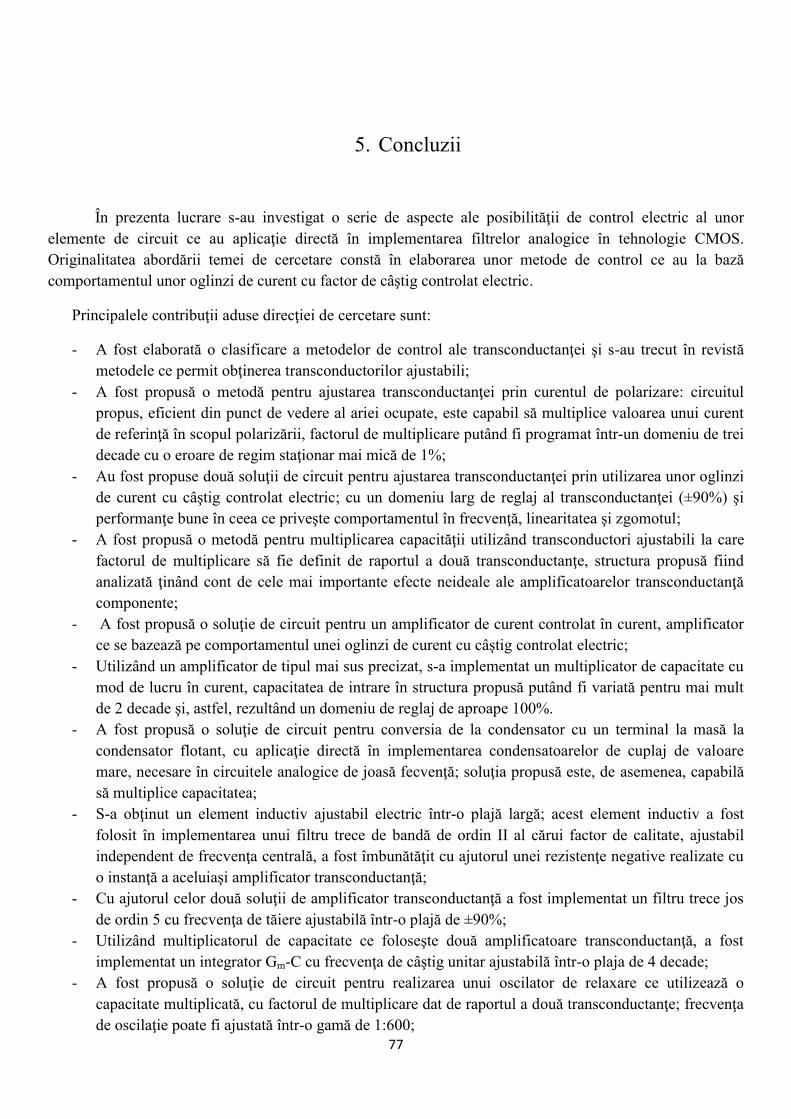
77
5. Concluzii
În prezenta lucrare s-au investigat o serie de aspecte ale posibilităţii de control electric al unor
elemente de circuit ce au aplicaţie directă în implementarea filtrelor analogice în tehnologie CMOS.
Originalitatea abordării temei de cercetare constă în elaborarea unor metode de control ce au la bază
comportamentul unor oglinzi de curent cu factor de câştig controlat electric.
Principalele contribuţii aduse direcţiei de cercetare sunt:
- A fost elaborată o clasificare a metodelor de control ale transconductanţei şi s-au trecut în revistă
metodele ce permit obţinerea transconductorilor ajustabili;
- A fost propusă o metodă pentru ajustarea transconductanţei prin curentul de polarizare: circuitul
propus, eficient din punct de vedere al ariei ocupate, este capabil să multiplice valoarea unui curent
de referinţă în scopul polarizării, factorul de multiplicare putând fi programat într-un domeniu de trei
decade cu o eroare de regim staţionar mai mică de 1%;
- Au fost propuse două soluţii de circuit pentru ajustarea transconductanţei prin utilizarea unor oglinzi
de curent cu câştig controlat electric; cu un domeniu larg de reglaj al transconductanţei (±90%) şi
performanţe bune în ceea ce priveşte comportamentul în frecvenţă, linearitatea şi zgomotul;
- A fost propusă o metodă pentru multiplicarea capacităţii utilizând transconductori ajustabili la care
factorul de multiplicare să fie definit de raportul a două transconductanţe, structura propusă fiind
analizată ţinând cont de cele mai importante efecte neideale ale amplificatoarelor transconductanţă
componente;
- A fost propusă o soluţie de circuit pentru un amplificator de curent controlat în curent, amplificator
ce se bazează pe comportamentul unei oglinzi de curent cu câştig controlat electric;
- Utilizând un amplificator de tipul mai sus precizat, s-a implementat un multiplicator de capacitate cu
mod de lucru în curent, capacitatea de intrare în structura propusă putând fi variată pentru mai mult
de 2 decade şi, astfel, rezultând un domeniu de reglaj de aproape 100%.
- A fost propusă o soluţie de circuit pentru conversia de la condensator cu un terminal la masă la
condensator flotant, cu aplicaţie directă în implementarea condensatoarelor de cuplaj de valoare
mare, necesare în circuitele analogice de joasă fecvenţă; soluţia propusă este, de asemenea, capabilă
să multiplice capacitatea;
- S-a obţinut un element inductiv ajustabil electric într-o plajă largă; acest element inductiv a fost
folosit în implementarea unui filtru trece de bandă de ordin II al cărui factor de calitate, ajustabil
independent de frecvenţa centrală, a fost îmbunătăţit cu ajutorul unei rezistenţe negative realizate cu
o instanţă a aceluiaşi amplificator transconductanţă;
- Cu ajutorul celor două soluţii de amplificator transconductanţă a fost implementat un filtru trece jos
de ordin 5 cu frecvenţa de tăiere ajustabilă într-o plajă de ±90%;
- Utilizând multiplicatorul de capacitate ce foloseşte două amplificatoare transconductanţă, a fost
implementat un integrator Gm-C cu frecvenţa de câştig unitar ajustabilă într-o plaja de 4 decade;
- A fost propusă o soluţie de circuit pentru realizarea unui oscilator de relaxare ce utilizează o
capacitate multiplicată, cu factorul de multiplicare dat de raportul a două transconductanţe; frecvenţa
de oscilaţie poate fi ajustată într-o gamă de 1:600;

78
Listă de lucrări publicate
G. Bonteanu, ― A Review of Capacitance Multiplication Techniques‖, ECAI 2018 - International
Conference – 10th Edition, Electronics, Computers and Artificial Intelligence
G. Bonteanu, A. Cracan, ―Enhanced wide range tunable CMOS transconductor for signal processing‖,
ROMANIAN JOURNAL OF INFORMATION SCIENCE AND TECHNOLOGY, vol. 20, nr. 4, 2017
G. Bonteanu, ―A wide range fine tuning capacitance multiplier‖, 2017 IEEE 23rd International Symposium
for Design and Technology in Electronic Packaging (SIITME)
G. Bonteanu, A. Cracan, ― A tunable gyrator-capacitor active inductor‖, 2017 IEEE 23rd International
Symposium for Design and Technology in Electronic Packaging (SIITME)
G. Bonteanu, ―A current controlled CMOS current amplifier, 2017 5th International Symposium on
Electrical and Electronics Engineering (ISEEE)
G. Bonteanu, A. Cracan, ― A high-gain programmable current mirror for large bias currents generation‖,
2017 5th International Symposium on Electrical and Electronics Engineering (ISEEE)
G. Bonteanu, A. Cracan, ―Wide range electrically controlled CMOS transconductor for adaptive signal
processing‖, 2017 International Semiconductor Conference (CAS)
G. Bonteanu, „A grounded capacitor to floating capacitor conversion circuit solution‖, BULLETIN OF
THE POLYTECHNIC INSTITUTE OF IAŞI, vol 63(67), nr. 1, 2017
G. Bonteanu, „On the use of controlled gain current mirrors in the implementation of tunable
transconductors‖, BULLETIN OF THE POLYTECHNIC INSTITUTE OF IAŞI, vol. 63, nr. 3, 2017, în curs
de apariţie
G. Bonteanu, „A review of the transconductance control solutions‖, BULLETIN OF THE POLYTECHNIC
INSTITUTE OF IAŞI, vol. 63, nr. 4, 2017, în curs de apariţie
R. G. Bozomitu; N. Cojan; G. Bonteanu, „A VLSI implementation of the 4th order elliptic fully differential
IIR switched-capacitor low-pass filter in CMOS technology‖, 2013 IEEE 19th International Symposium for
Design and Technology in Electronic Packaging (SIITME)
M. Mocanu, P. M. Puscasu, G. Bonteanu and L. Goras „Describing function analysis of an LC oscillator
structure‖, BULLETIN OF THE POLYTECHNIC INSTITUTE OF IAŞI , Tomul LVIII, Fasc 3, 2012
D. Imbrea, N. Cojan, G. Bonteanu ―A 600 nA, 0.7 ppm/ºC CMOS Voltage Reference Circuit without
Resistors‖, IISCS 2011
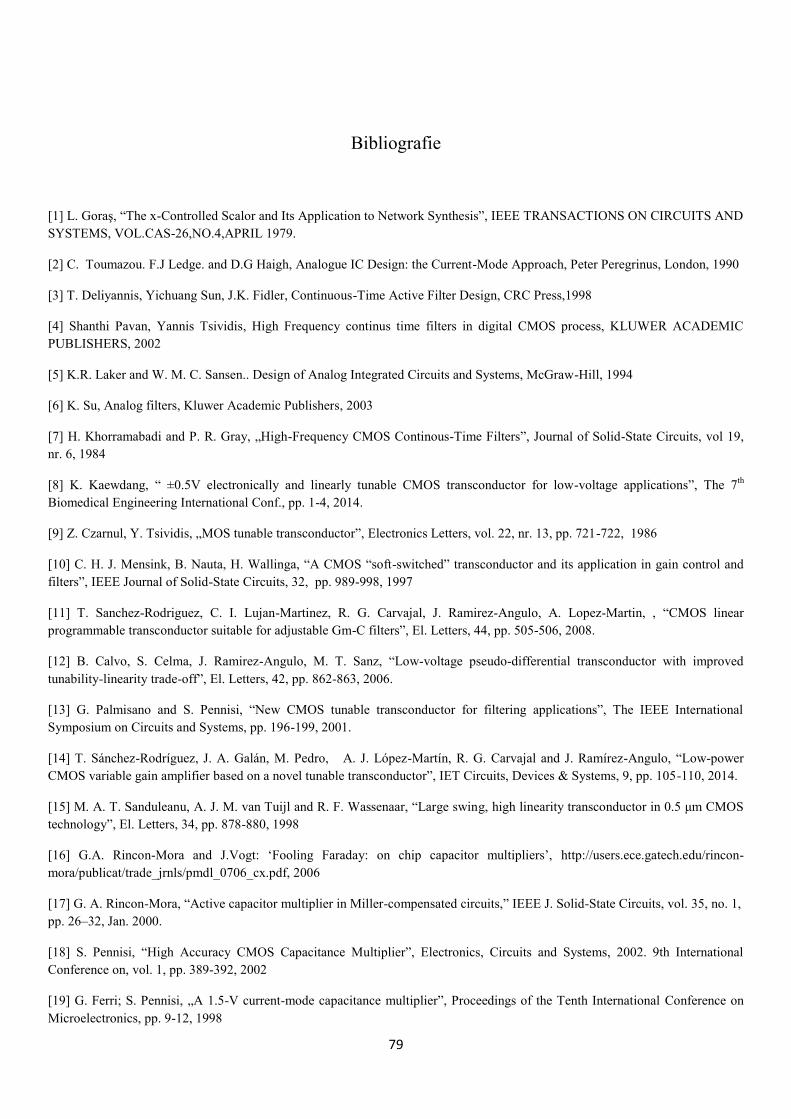
79
Bibliografie
[1] L. Goraş, ―The x-Controlled Scalor and Its Application to Network Synthesis‖, IEEE TRANSACTIONS ON CIRCUITS AND
SYSTEMS, VOL.CAS-26,NO.4,APRIL 1979.
[2] C. Toumazou. F.J Ledge. and D.G Haigh, Analogue IC Design: the Current-Mode Approach, Peter Peregrinus, London, 1990
[3] T. Deliyannis, Yichuang Sun, J.K. Fidler, Continuous-Time Active Filter Design, CRC Press,1998
[4] Shanthi Pavan, Yannis Tsividis, High Frequency continus time filters in digital CMOS process, KLUWER ACADEMIC
PUBLISHERS, 2002
[5] K.R. Laker and W. M. C. Sansen.. Design of Analog Integrated Circuits and Systems, McGraw-Hill, 1994
[6] K. Su, Analog filters, Kluwer Academic Publishers, 2003
[7] H. Khorramabadi and P. R. Gray, „High-Frequency CMOS Continous-Time Filters‖, Journal of Solid-State Circuits, vol 19,
nr. 6, 1984
[8] K. Kaewdang, ― ±0.5V electronically and linearly tunable CMOS transconductor for low-voltage applications‖, The 7th
Biomedical Engineering International Conf., pp. 1-4, 2014.
[9] Z. Czarnul, Y. Tsividis, „MOS tunable transconductor‖, Electronics Letters, vol. 22, nr. 13, pp. 721-722, 1986
[10] C. H. J. Mensink, B. Nauta, H. Wallinga, ―A CMOS ―soft-switched‖ transconductor and its application in gain control and
filters‖, IEEE Journal of Solid-State Circuits, 32, pp. 989-998, 1997
[11] T. Sanchez-Rodriguez, C. I. Lujan-Martinez, R. G. Carvajal, J. Ramirez-Angulo, A. Lopez-Martin, , ―CMOS linear
programmable transconductor suitable for adjustable Gm-C filters‖, El. Letters, 44, pp. 505-506, 2008.
[12] B. Calvo, S. Celma, J. Ramirez-Angulo, M. T. Sanz, ―Low-voltage pseudo-differential transconductor with improved
tunability-linearity trade-off‖, El. Letters, 42, pp. 862-863, 2006.
[13] G. Palmisano and S. Pennisi, ―New CMOS tunable transconductor for filtering applications‖, The IEEE International
Symposium on Circuits and Systems, pp. 196-199, 2001.
[14] T. Sánchez-Rodríguez, J. A. Galán, M. Pedro, A. J. López-Martín, R. G. Carvajal and J. Ramírez-Angulo, ―Low-power
CMOS variable gain amplifier based on a novel tunable transconductor‖, IET Circuits, Devices & Systems, 9, pp. 105-110, 2014.
[15] M. A. T. Sanduleanu, A. J. M. van Tuijl and R. F. Wassenaar, ―Large swing, high linearity transconductor in 0.5 μm CMOS
technology‖, El. Letters, 34, pp. 878-880, 1998
[16] G.A. Rincon-Mora and J.Vogt: ‗Fooling Faraday: on chip capacitor multipliers‘, http://users.ece.gatech.edu/rincon-
mora/publicat/trade_jrnls/pmdl_0706_cx.pdf, 2006
[17] G. A. Rincon-Mora, ―Active capacitor multiplier in Miller-compensated circuits,‖ IEEE J. Solid-State Circuits, vol. 35, no. 1,
pp. 26–32, Jan. 2000.
[18] S. Pennisi, ―High Accuracy CMOS Capacitance Multiplier‖, Electronics, Circuits and Systems, 2002. 9th International
Conference on, vol. 1, pp. 389-392, 2002
[19] G. Ferri; S. Pennisi, „A 1.5-V current-mode capacitance multiplier‖, Proceedings of the Tenth International Conference on
Microelectronics, pp. 9-12, 1998
80
[20] M. Somdunyakanok, K. Angkeaw, P. Prommee, ―Floating-capacitance multiplier based on CCDDCCs and its application‖,
IEEE Region 10 Annual International Conference, Proceedings, pp. 1367-1370, 2011
[21] J. Aguado-Ruiz, J. Hernandez-Alvidrez, A.J. Lopez-Martin, R.G. Carvajal and J. Ramirez-Angulo, „Programmable
capacitance scaling scheme based on operational transconductance amplifiers‖, ELECTRONICS LETTERS, VOL. 45, NO. 3,
2009
[22] I. Padilla-Cantoya, „Capacitor Multiplier With Wide Dynamic Range and Large Multiplication Factor for Filter
Applications‖, IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—II: EXPRESS BRIEFS, VOL. 60, NO. 3, 2013
[23] J. Ramírez-Angulo et al., ―Comparison of conventional and new flipped voltage structures with increased input/output signal
swing and current sourcing/sinking capabilities,‖ Proc. MWSCAS, Cincinnati, OH, USA, vol. 2, pp. 1151–1154, 2005
[24] R. G. Carvajal, J. Ramírez-Angulo, A. López-Martin, A. Torralba, J. Galán, A. Carlosena, and F. Muñoz, ―The flipped
voltage follower: A useful cell for low-voltage low-power circuit design,‖ IEEE Trans. Circuits Syst. I, vol. 52, no. 7, pp. 1276–
1291, 2005
[25] Randall L. Geiger, Edgar Sanchez-Sinencio, „Active Filter Design Using Operational Transconductance Amplifiers: A
Tutorial‖, IEEE CIRCUITS AND DEVICES MAGAZINE, 1985
[26] Fei Yuan, CMOS Active Inductors and Transformers, Principle, Implementation, and Applications, Springer, 2008
[27] B. Razavi, Design of CMOS integrated circuits for optical communications, McGraw-Hill, Boston, 2003
[28] R. A. Mao, ―Current mirror digital to analog converter,‖ May-1983 [Online]. Available:
http://www.google.com/patents/US4384274
[29] N. Paulino and J. E. Franca, ―A CMOS digitally programmable current multiplier,‖ in 1996 IEEE International
Symposium on Circuits and Systems. Circuits and Systems Connecting the World. ISCAS 96, 1996, vol. 1, pp. 254–257 vol.1.
[30] R. Mittal and D. Montanari, ―Programmable LED driver,‖ May-2012 [Online]. Available:
http://www.google.com/patents/US8169387
[31] J. G. Maneatis, ―Programmable current mirror,‖ Oct-2002 [Online]. Available:
http://www.google.com/patents/US6462527
[32] P. S. Yu and C. H. Chan, ―Programmable current mirror,‖ Mar-2013 [Online]. Available:
http://www.google.com/patents/US8405377
[33] L. Tomasini and R. Castello, ―High ratio current mirror with enhanced power supply rejection ratio,‖ Jan-1996 [Online].
Available: http://www.google.com/patents/US5485074
[34] R. J. Widlar, ―Low-value current source for integrated circuits,‖ May-1967 [Online]. Available:
https://www.google.com/patents/US3320439
[35] T. Delbrück and A. V. Schaik, ―Bias Current Generators with Wide Dynamic Range,‖ Analog Integrated Circuits and
Signal Processing, vol. 43, no. 3, pp. 247–268, Jun. 2005 [Online]. Available: https://doi.org/10.1007/s10470-005-1606-1
[36] J. Ramirez-Angulo, ―Wide range gain programmable class AB linear current mirrors for low supply operation,‖ IEEE
Transactions on Circuits and Systems II: Analog and Digital Signal Processing, vol. 41, no. 9, pp. 631–634, Sep. 1994.
[37] A. J. Lopez-Martin, J. Ramirez-Angulo, C. Durbha, and R. G. Carvajal, ―A CMOS transconductor with multidecade
tuning using balanced current scaling in moderate inversion,‖ IEEE Journal of Solid-State Circuits, vol. 40, no. 5, pp. 1078–1083,
May 2005.
[38] G. Bonteanu, A. Cracan, ― A high-gain programmable current mirror for large bias currents generation‖, 2017 5th
International Symposium on Electrical and Electronics Engineering (ISEEE)
[39] G. Bonteanu, A. Cracan, ―Wide range electrically controlled CMOS transconductor for adaptive signal processing‖, 2017
International Semiconductor Conference (CAS)
81
[40] G. Bonteanu, „On the use of controlled gain current mirrors in the implementation of tuneable transconductors‖,
BULLETIN OF THE POLYTECHNIC INSTITUTE OF IAŞI, vol. 63, nr. 3, 2017
[41] G. Bonteanu, A. Cracan, ―Enhanced wide range tunable CMOS transconductor for signal processing‖, ROMANIAN
JOURNAL OF INFORMATION SCIENCE AND TECHNOLOGY, vol. 20, nr. 4, 2017
[42] B. Sun and F. Yuan, ‗New low-voltage fully-balanced wide-band differential CMOS current amplifier‘ Midwest
Symposium on Circuits and Systems, 2002, 2, pp. 57-60
[43] G. Palmisano and S. Pennisi, ‗A versatile CMOS fully differential current amplifier‘, The IEEE International Conference
on Electronics, Circuits and Systems, 1999, 2, pp. 607-610
[44] K. Kaewdang and W. Surakampontorn, ‗Class AB differential input/output current-controlled current amplifier‘,
International Symposium on Intelligent Signal Processing and Communication Systems, 2013, pp. 665-669
[45] G. Bonteanu, ―A current controlled CMOS current amplifier, 2017 5th International Symposium on Electrical and
Electronics Engineering (ISEEE)
[46] G. Bonteanu, ―A wide range fine tuning capacitance multiplier‖, 2017 IEEE 23rd International Symposium for Design
and Technology in Electronic Packaging (SIITME)
[47] Chen C.H., Mak P.I., Zhang T.T., Vai M.I., Mak P.U., Pun S.H., Wan F.,. Martins R.P., A 2.4 Hz-to-10 kHz-Tunable
Biopotential Filter using a Novel Capacitor Multiplier, Prime Asia 2009.
[48] Solís-Bustos S., Silva-Martínez J., Maloberti F., and Sánchez-Sinencio E., A 60-dB Dynamic-Range CMOS Sixth-Order
2.4-Hz Low-Pass Filter for Medical Applications, IEEE Transactions on Circuits and Systems—II: Analog and Digital Signal
Processing, Vol. 47, No. 12, December 2000.
[49] Brînzoi P., Cracan A., Cojan N., A new approach in designing electrically controlled capacitance multipliers,
International Symposium on Signals, Circuits and Systems 2011, Iaşi, România
[50] G. Bonteanu, „A grounded capacitor to floating capacitor conversion circuit solution‖, BULLETIN OF THE
POLYTECHNIC INSTITUTE OF IAŞI, vol 63(67), nr. 1, 2017
[51] Wang Yu, Liu Jing, Yan Na and Min Hao, ―A low-noise widely tunable Gm-C filter with frequency calibration‖, Journal
of Semiconductors, 37, 8, pp. 1-8, 2016.
[52] H. J. Orchard, "Inductorless filters ", Electronics Letters, Vol. 2,Issue 6, pp. 224-225, June, 1966;
[53] A. Thanachayanont; A. Payne, "CMOS floating active inductor and its applications to bandpass filter and oscillator
designs ", IEE Proceedings - Circuits, Devices and Systems, Vol. 147, No. 1, pp. 42-48, February, 2000;
[54] R. Sharman; A. K. A'ain; M. Azmi; H. M. Zhe, "Design approach for tunable CMOS active inductor ", IEEE
International Conference on Semiconductor Electronics, pp. 143-147, 2004;
[55] G. Bonteanu, A. Cracan, ― A tunable gyrator-capacitor active inductor‖, 2017 IEEE 23rd International Symposium for
Design and Technology in Electronic Packaging (SIITME)