Embed Size (px)
Citation preview

UNIVERSITATEA TEHNICĂ
“GHEORGHE ASACHI” DIN IAȘI
Facultatea de Automatică și Calculatoare
Contribuții în proiectarea unităților centrale
utilizate în arhitecturi de calcul dedicate
REZUMATUL TEZEI DE DOCTORAT
Contributions in designing central processing units
used in dedicated computing architectures
PH.D. Thesis summary
Conducător de doctorat
Prof. univ. dr. ing. Alexandru Valachi
Doctorand
Asist. ing. Andrei Stan
IAȘI – 2011




5
Cuprins
Cuprins ................................................................................................................................................. 5
1 Introducere ................................................................................................................................ 7
1.1 Motivație ............................................................................................................................ 7
1.2 Structura tezei .................................................................................................................... 8
2 Sisteme de calcul dedicate ...................................................................................................... 11
2.1 Introducere ....................................................................................................................... 11
2.2 Caracteristici ale sistemelor de calcul dedicate ............................................................... 12
2.2.1 Caracteristici structurale și funcționale .................................................................... 12
2.2.2 Caracteristici non-funcționale .................................................................................. 13
3 Sisteme de calcul dedicate cu microcontroler ......................................................................... 15
3.1 Automate finite ................................................................................................................ 15
3.1.1 Opțiuni de implementare .......................................................................................... 15
3.1.2 Model de automat finit pentru sisteme dedicate ....................................................... 16
3.1.3 Automat finit cu mecanism de siguranță .................................................................. 23
3.2 Bibliotecă de funcții pentru criptare ................................................................................ 27
3.2.1 Metode de criptare .................................................................................................... 27
3.2.2 Algoritmi de criptare ................................................................................................ 29
3.2.3 Evaluarea implementării algoritmilor de criptare .................................................... 29
3.2.4 Arhitectură pentru securizarea sistemelor dedicate .................................................. 31
3.2.5 Exemplu de utilizare a metodei propuse .................................................................. 32
3.3 Conversie de cod în virgulă mobilă în cod în virgulă fixă .............................................. 34
3.3.1 Proiectarea aplicației de conversie a codului ........................................................... 34
3.3.2 Transformarea fluxului de date ................................................................................ 35
3.3.3 Tehnici folosite în proiectarea aplicației .................................................................. 38
3.3.4 Generarea codului..................................................................................................... 38
3.3.5 Evaluarea metodei propuse ...................................................................................... 38
3.4 Concluzii .......................................................................................................................... 40
4 Sisteme de calcul dedicate cu circuite digitale reconfigurabile .............................................. 41
4.1 Sisteme reconfigurabile ................................................................................................... 41
4.2 Spatial computing ............................................................................................................ 42
4.3 Structură pentru monitorizarea timpului de execuție al subprogramelor ........................ 42
4.3.1 Studii similare........................................................................................................... 42
4.3.2 Arhitectura structurii de monitorizare ...................................................................... 43
4.3.3 Evaluarea structurii de monitorizare ........................................................................ 45

4.4 Structură pentru monitorizare a execuției aplicațiilor pe un MPSoC .............................. 46
4.4.1 Arhitectura sistemului MPSoC ................................................................................. 47
4.4.2 Arhitectura structurii de monitorizare ...................................................................... 49
4.5 Arhitectură pentru transformarea dinamică a codului în module hardware .................... 51
4.5.1 Arhitectura sistemului reconfigurabil ....................................................................... 52
4.5.2 Algoritmii de funcționare pentru sistemul reconfigurabil ........................................ 54
4.6 Concluzii .......................................................................................................................... 56
5 Structură autotestabilă pentru memoriile RAM ...................................................................... 59
5.1 Defecte de memorie ......................................................................................................... 59
5.2 Notaţii folosite în descrierea testelor de memorie ........................................................... 59
5.3 Testul de memorie MarchS2C ......................................................................................... 61
5.4 Comparație cu alți algoritmi de testare March ................................................................ 63
5.5 Structuri autotestabile ...................................................................................................... 63
5.6 Proiectarea logicii de testare ............................................................................................ 64
5.6.1 Logica de generare a adresei .................................................................................... 64
5.6.2 Logica de generare a datelor şi de verificare ............................................................ 64
5.6.3 Logica de control microprogramată ......................................................................... 65
5.7 Concluzii .......................................................................................................................... 66
6 Concluzii ................................................................................................................................. 67
6.1 Contribuții personale ....................................................................................................... 69
6.2 Diseminare rezultate ........................................................................................................ 70
6.2.1 Sumar publicaţii ....................................................................................................... 70
6.2.2 Detalii publicaţii ....................................................................................................... 70
6.3 Direcții viitoare de cercetare ............................................................................................ 73
Bibliografie ........................................................................................................................................ 74

7
1 Introducere
1.1 Motivație
Calculatoarele și tehnologia informației au avut un impact major în evoluția societății umane
în cursul ultimilor zeci de ani. Această influență se va face simțită și în viitor având în vedere că
aceste tehnologii au un rol important și o utilizare largă în infrastructura societății actuale. Datorită
legăturilor create între societate și tehnologie, evoluția societății este strâns acompaniată de evoluția
tehnologică.
În privința calculatoarelor și tehnologiei informației, tendințele actuale sunt reprezentate de
un interes foarte ridicat pentru acces la informație prin multiple medii, servicii personalizate și
servicii de realitate virtuală de înaltă calitate. Simultan, se constată o decuplare a proceselor de
calcul și cele de stocare a informației în paralel cu o creștere semnificativă a centrelor de procesare
a datelor (engl. data processing centers). Aplicațiile domestice, roboții, mijloacele de transport
autonome, sistemele de teleprezență și alte aplicații curente sunt exemple de tehnologii care susțin
și cauzează schimbări în societate.
Dezvoltarea acestor tehnologii și aplicații sunt influențate de tendințe din mediul economic
precum presiunea exercitată de costuri, restructurarea industriilor, modele de afaceri orientate către
servicii, convergența funcționalității dispozitivelor electronice și mediul cooperativ de dezvoltare al
aplicațiilor.
Provocările la care trebuie să răspundă sistemele de calcul dedicate (sunt denumite și
sisteme de calcul încorporate – engl. embedded) sunt generate de mai multe surse (Duranton, et al.,
2010).
Provocări tehnologice
Schimbări ale societății
Caracteristicile aplicațiilor
Aspecte economie
Constrângeri tehnologice
Figura 1.1.1 Surse ale provocărilor tehnologice pentru sistemele de calcul dedicate,
(Duranton, et al., 2010)
Proiectarea sistemelor de calcul pentru crearea tehnologiilor și implementarea aplicațiile
secolului 21 se confruntă cu următoarele constrângeri tehnologice:

Introducere
Partea hardware are o flexibilitate comparabilă sau mai ridicată decât partea
software a unui sistem de calcul.
Puterea consumată este o metrică a performanței sistemelor.
Caracteristicile comunicațiilor sunt o metrică a performanței sistemelor.
Circuitele de tip ASIC devin neatractive economic.
Proiectarea circuitelor ASIC pentru condițiile cele mai defavorabile conduce la
faliment.
Sistemele complexe trebuie să se bazeze pe componente nefiabile.
Timpul devine relevant.
Sistemele de calcul sunt supuse atacurilor în mod continuu.
Paralelismul pare să fie dificil de exploatat eficient.
Legea lui Moore are un sfârșit.
1.2 Structura tezei
Teza este structurată în șase capitole al căror conținut este prezentat în continuare.
În capitolul unu este prezentată motivația abordării temei propuse cu precizarea surselor
provocărilor tehnologice la care trebuie să răspundă sistemele de calcul dedicate.
În capitolul al doilea sunt prezentate elementele caracteristice ale arhitecturilor sistemelor
de calcul dedicate. Este prezentată o clasificare a arhitecturilor sistemelor de calcul, precum și o
structură generală pentru arhitectura sistemelor de calcul dedicate. Sunt enumerate trăsături
specifice care trebuie considerate în proiectarea sistemelor dedicate și modele pentru dezvoltarea de
aplicații pentru acest tip de sisteme. De asemenea, sunt amintite și standarde folosite în certificarea
și validarea implementării sistemelor de calcul dedicate utilizate în sisteme cu cerințe speciale de
siguranță în funcționare.
Capitolul al treilea prezintă proiectarea de module software utilizate în dezvoltarea
aplicaților software pentru sisteme de calcul dedicate cu microcontroler. Modulele implementate
sunt evaluate prin măsurarea unor caracteristici precum timpul de execuție, cantitatea de memorie
utilizată sau consumul de energie. Este prezentată proiectarea unui modul software care
implementează un model computațional de tip automat finit. Acest modul este extins cu adăugarea
unui mecanism de siguranță pentru prevenirea blocării automatului finit. Al doilea modul software
proiectat conține algoritmi de criptare, cu diverse performanțe de securizare a informațiilor, care
sunt evaluați prin estimarea consumului de energie necesar execuției lor pe un sistem dedicat. Este
propusă utilizarea acestor algoritmi într-o arhitectură adaptivă de securizare a sistemelor dedicate
prin care se obține o scădere a consumului de energie prin adaptarea algoritmilor de criptare la
condițiile de operare. Al treilea modul proiectat este o aplicație de generare de cod pentru
optimizarea implementării filtrelor digitale folosind numai operanzi și operații cu numere întregi.
Aplicația poate genera mai multe soluții folosind o funcție de cost în care sunt luate în considerare
complexitatea calculelor și acuratețea rezultatului.
Capitolul al patrulea prezintă proiectarea de arhitecturi de sisteme de calcul dedicate care
folosesc circuite reconfigurabile. Sunt proiectate două structuri de monitorizare hardware care pot fi
incluse în sistemele dedicate pentru a crește nivelul de siguranță în funcționare. Structurile de
monitorizare urmăresc comportamentul temporal al execuției aplicațiilor. Prima structură
monitorizează timpul de execuție al rutinelor care sunt apelate în timpul rulării aplicațiilor de către
un microprocesor, iar cea de a doua structură monitorizează transferurile de informații care au loc
într-un sistem multiprocesor. Arhitecturile de monitorizare sunt evaluate pe sisteme cu circuite
reconfigurabile FPGA (engl. Field Programmable Gates Array). Tot în acest capitol este prezentată
o arhitectură pentru un sistem de calcul capabil să monitorizeze și să evalueze execuția unei
aplicații de către un microprocesor pentru a genera apoi module hardware care implementează
funcționalități identice cu porțiuni din codul aplicației monitorizare.

Introducere
Capitolul al cincilea prezintă proiectarea unui modul de memorie autotestabil. Este
prezentată proiectarea unui test de memorie de tip March capabil să detecteze toate defectele de tip
cuplaj între două celule de memorie. Se demonstrează că acest test acoperă toate tipurile de
defectele de tip cuplaj între două celule, precum și optimalitatea testului relativ la numărul de
operații de scriere și citire necesar pentru a detecta defectele. Este realizată și o analiză comparativă
cu alte teste de memorie din care reiese eficiența testului propus. Acest algoritm este implementat
într-un modul al unei structuri autotestabile cu cale de control microprogramată.
Capitolul al șaselea prezintă concluziile tezei, contribuțiile personale, diseminarea
rezultatelor, precum și direcțiile viitoare de cercetare.


11
2 Sisteme de calcul dedicate
2.1 Introducere
Evoluția sistemelor de calcul a condus la trei categorii principale (Hennessy & Patterson,
2007) caracterizate de aplicațiile pe care le rulează, cerințele la care trebuie să facă față și
tehnologiile folosite la implementare .
Tabelul 2.1.1 Tipuri de sisteme de calcul și criterii de clasificare, după (Hennessy & Patterson, 2007)
Caracteristică Desktop Server Sisteme dedicate
Preț sistem 500 – 5000 $ 5000 – 5000000 $ 10-100000 $
Preț microprocesor 50 – 500 $ 200 – 10000 $ 0.01 – 100 $
Cerințe de
proiectare speciale
Raport
preț/performanță
Performanțe grafice
Disponibilitate,
Scalabilitate, Rata de
răspuns
Preț, Putere
consumată,
performanțe specifice
aplicației
Bucăți vândute 200.000.000 10.000.000 3.000.000.000
Sistemele de calcul dedicate reprezintă categoria cu creșterea cea mai rapidă. Aceste sisteme
sunt prezente în aplicații de consum, de la cuptoare cu microunde până la telefoane mobile și
console de jocuri.
Sistemele dedicate au cea mai largă plajă pentru costuri și puterea de calcul disponibilă. În
construcția lor sunt utilizate microprocesoare ieftine pe 8 sau 16 biți sau microprocesoare pe 32 de
biți cu performanțe de 100 MIPS la un cost de 5$. Tipurile de microprocesoare disponibile pentru
sistemele dedicate sunt foarte variate ca performanțe de calcul și ca urmare prețul este un factor
determinant în proiectarea acestor sisteme. Există cerințe de performanță în proiectarea acestor
sisteme, însă obiectivul principal este atingerea performanțelor cu costuri minime.
Sistemele de calcul dedicate sunt proiectate și construite pentru a îndeplini doar o anumită
funcție sau un set restrâns de funcții înrudite. Aceste sisteme electronice fac parte din sisteme mai
complexe și implementează cel mai adesea funcții de control, comunicație sau interfață cu
utilizatorul (acolo unde este cazul). Datorită acestei incluziuni, sistemele de calcul dedicate se mai
numesc și sisteme de calcul încorporate (engl. embedded). În continuare se va folosi termenul de
sisteme de calcul dedicate pentru a denumi această categorie de sisteme de calcul.
Sistemele de calcul dedicate se deosebesc de sistemele de calcul de uz general prin faptul că
ele execută o singură aplicație care implementează funcțiile necesare îndeplinirii sarcinilor pentru
care a fost construit sistemul dedicat.

Sisteme de calcul dedicate
12
2.2 Caracteristici ale sistemelor de calcul dedicate
2.2.1 Caracteristici structurale și funcționale
Sistemele de calcul dedicate sunt sisteme de calcul specializate care reprezintă părți
componente ale unor sisteme mai complexe. Un sistem de calcul dedicat este alcătuit dintr-o
combinație de elemente hardware și software (Stallings, 2010) care formează un nucleu de calcul
proiectat special pentru realizarea unei funcții specifice (Figura 2.2.1).
Figura 2.2.1 Organizarea unui sistem de calcul dedicat (încorporat – engl. embedded)
(Stallings, 2010)
Foarte frecvent, sistemele de calcul dedicate prezintă următoarele caracteristici funcționale
care determină luarea de decizii potrivite în procesul de proiectare și implementare:
Procesarea în timp real a informației. Sistemele dedicate trebuie să reacționeze în
limite de timp bine definite la evenimentele provenite din mediu. Nerespectarea
acestor limite poate avea consecințe neprevăzute și uneori periculoase pentru
siguranța mediului și a utilizatorilor.
Sunt sisteme reactive. Simt evenimente din mediu prin intermediul senzorilor și
controlează mediul utilizând actuatoare. Acest fapt impune sistemelor dedicate
atingerea unor performanțe în funcționare consistente cu mediul în care operează. Un
sistem reactiv folosește o combinație de elemente hardware și software pentru a
răspunde evenimentelor provenite din mediu cu respectarea unor constrângeri bine
definite. Evenimentele externe pot fi periodice și predictibile sau aperiodice și greu
de anticipat. Planificarea în vederea procesării ține cont atât de evenimentele
periodice cât și de ce cele aperiodice iar performanțele execuției trebuie garantate
pentru cele mai defavorabile condiții.
Sunt sisteme hibride. Includ elemente hardware utilizate pentru procesări analogice
(e.g. convertoare analog-numerice și/sau numeric-analogice) și elemente hardware
utilizate pentru procesări digitale (e.g. numărătoare, interfețe pentru comunicații
digitale). Circuitele integrate folosite în proiectarea de sisteme de calcul dedicate
sunt de diverse tipuri: microcontrolere, microprocesoare, procesoare digitale de
semnal sau circuite FPGA (engl. Field Programmable Gates Array).
Au resurse de procesare limitate. Adesea, unitățile centrale ale sistemelor dedicate
au arhitecturi simple (e.g. fără memorii cache, fără pipeline) și cantități reduse de
memorie de cod și date. Datorită acestui lucru, dezvoltarea de aplicații pentru
sisteme dedicate este o provocare și implementarea lor trebuie să fie foarte eficientă.
Au constrângeri pentru consumul de energie Sistemele dedicate sunt frecvent
folosite în aplicații pentru care autonomia energetică și disponibilitatea îndelungată
(e.g. rețele de senzori) sunt calități foarte importante. Pentru a satisface aceste

Sisteme de calcul dedicate
13
cerințe, proiectarea aplicațiilor trebuie să aibă în vedere și să implementeze tehnici
pentru optimizarea consumului de energie pentru procesările efectuate.
Au cerințe de siguranță în funcționare. Unele sisteme dedicate sunt incluse în
sisteme complexe pentru a implementa funcții de control (e.g. în industria
automobilelor: sisteme ABS sau controlul tracțiunii). Funcționarea defectuoasă a
acestor sisteme poate afecta siguranța utilizatorilor și ca atare procesul de dezvoltare
trebuie să prevadă mijloace și metode pentru satisfacerea unui nivel acceptabil de
siguranță a implementării.
Costul. Sistemele dedicate sunt sensibile la costuri. Costurile provin din surse
precum: costuri de proiectare, de producție sau de mentenanță.
Modelele computaționale sunt abstractizări care guvernează interacțiunile dintre
componentele unui sistem. Modelele computaționale pentru proiectarea de sisteme dedicate trebuie
să ofere mijloace și metode pentru exprimarea și implementarea concurenței și a comportamentului
temporal. Exemple de modele computaționale utilizate pentru dezvoltarea de aplicații pentru
sistemele dedicate sunt:
Flux de date (engl. dataflow). Componentele aplicației sunt reprezentate de module
care realizează calcule atomice asupra datelor de intrare atunci când acestea sunt
disponibile. Conexiunile dintre module descriu fluxul de date de la module producător
la module consumator.
Execuție periodică (engl. time triggered). Componentele aplicației sunt reprezentate
de module a căror activare are loc periodic la apariția unor evenimente declanșate de
scurgerea unor intervale de timp cu perioadă fixă.
Bazate pe evenimente (engl. event triggered). Componentele aplicației sunt
reprezentate de module a căror activare are loc la apariția unor evenimente descrise de
o valoare și momentul apariției.
Automate finite (engl. finite state machines). Este un model computațional
secvențial. Execuția unui automat presupune o singură stare activă la un moment dat.
2.2.2 Caracteristici non-funcționale
Datorită integrării sistemelor dedicate ca elemente de comandă ale unor sisteme mai
complexe care au cerințe severe de eficiență a funcționării, sistemele dedicate trebuie să prezinte
următoarele atribute non-funcționale (Avizienis, Laprie, & Randell, 2004):
disponibilitate: proprietatea sistemului de a fi capabil să ofere serviciul la un anumit
moment de timp;
fiabilitate: proprietatea sistemului de a fi capabil să ofere serviciul pentru un anumit
interval de timp;
siguranță: proprietatea sistemului de a nu provoca daune mediului, oamenilor sau
alte pierderi materiale;
integritate: proprietatea sistemului de a nu manifesta alterări;
mentenabilitate: proprietatea sistemului de a suporta reparații sau modificări.
Considerate împreună, toate aceste atribute formează noțiunea de eficiență globală (engl.
dependability). Pentru a realiza unele dintre componentele eficienței globale s-au dezvoltat diverse
tehnici:
prevenirea defectelor – prevenirea apariției sau introducerii de defecte;
tolerarea defectelor – funcționarea în prezența defectelor;
îndepărtarea defectelor – reducerea numărului și severității defectelor;
prevederea defectelor – estimarea numărului curent, a incidenței și a consecințelor
probabile ale defectelor.


15
3 Sisteme de calcul dedicate cu microcontroler
3.1 Automate finite
O definiție formală a unui automat finit (engl. Finite State Machine - FSM) este prezentată
în continuare. Un automat finit este un 6-uplu (Q, 𝛴, ∆, δ, 𝛌, q0) în care:
Q este o mulțime nevidă, finită – mulțimea stărilor;
𝛴 este o mulțime nevidă, finită – alfabetul de intrare;
∆ este o mulțime nevidă, finită – alfabetul de ieșire;
δ funcția de tranziție δ : Q x 𝛴 → Q;
𝛌 funcție de generare a ieșirii:
o automat finit Moore – 𝛌 : Q → ∆;
o automat finit Mealy – 𝛌 : Q x 𝛴 → ∆;
q0 starea inițială.
Implementarea unui automat finit implică exprimarea elementelor sale componente: stări,
tranziții, intrări (e.g. evenimente sau condiții) și ieșiri (e.g. acțiuni) cu mijloace specifice mediului
de implementare.
Pentru o implementare hardware sunt proiectate structuri logice combinaționale pentru
funcțiile δ și 𝛌. Pentru stocarea valorii stării curente sunt utilizate registre. Dacă un automat are Ni
intrări binare și No ieșiri binare, atunci alfabetul de intrare și cel de ieșire sunt spații Bool cu Ni,
respectiv Nb dimensiuni.
Implementările software ale automatelor finite permit o mai mare flexibilitate în modelarea
elementelor componente ale automatelor.
Utilizarea automatelor finite este una dintre metodele de bază pentru dezvoltarea aplicațiilor
software executate pe sisteme dedicate oferind suport pentru etapele de proiectare și implementare
din ciclul de dezvoltare al aplicațiilor. Automatele finite sunt folosite pentru a exprima dinamica
unei aplicații software. Pentru a proiecta un automat finit utilizat în aplicații software pentru sisteme
dedicate este necesar să se stabilească din punct de vedere funcțional componentele care fac parte
din sistem și cele care sunt externe sistemului.
3.1.1 Opțiuni de implementare
Pentru implementarea în software a automatelor finite există câteva abordări principale
(Williams, 2006). Se are în vedere utilizarea limbajului de programare C, acesta fiind cel mai
utilizat în dezvoltarea de aplicații pentru sistemele dedicate.
cod secvențial direct;
instrucțiuni SWITCH-CASE multiple;
instrucțiuni GO-TO și etichete;

Sisteme de calcul dedicate cu microcontroler
16
metode bazate pe tabele;
model de dezvoltare orientat obiect.
Deosebirile cele mai importante între aceste modele de implementare sunt date de modurile
de:
reprezentare ale intrărilor, ieșirilor și evenimentelor automatului finit;
monitorizare a intrărilor și evenimentelor automatului finit;
generare a ieșirilor automatului finit.
3.1.2 Model de automat finit pentru sisteme dedicate
Automatele finite sunt printre cele mai folosite modele computaționale utilizate (Harel,
2009) în sistemele de calcul dedicate pentru a crea aplicații (i.e. engl. firmware) de calitate.
Implementarea particularizată pentru o aplicație anume a automatelor finite necesită timp și este
predispusă la erori. O abordare mai eficientă este proiectarea unui module sau nucleu abstract
(kernel sau core) care, pe baza unei descrieri adecvate, execută un model al unui automat finit. Prin
utilizarea unui astfel de nucleu, un proiectant de sisteme dedicate trebuie să specifice numai
acțiunile, verificările și tranzițiile, ca simple funcții și tabele și să lase nucleul să se ocupe de
ansamblul operaţiilor de gestiune internă necesare pentru a executa automatul finit.
În continuare se prezintă și se descriu etapele de implementare și evaluare ale unui nucleu de
automat finit cu scopul de a-l utiliza în procesul de dezvoltare al aplicațiilor software pentru sisteme
de calcul dedicate (Stan, Botezatu, Panduru, & Lupu, 2009).
3.1.2.1 Implementare
Modelul propus pentru un nucleu de automat finit este compus din stări, evenimente sau
condiții, tranziții și funcții de acțiune. Fiecare dintre aceste componente precum și modurile de
implementare sunt abordate în manieră detaliată în cele ce urmează.
Fiecare stare este descrisă de structura tip FSME_STATE prezentată în Figura 3.1.1.
Structura conține informații despre funcția de acțiune care este executată în această stare, numărul
de tranziții din starea respectivă și o referință la un tabel care descrie tranzițiile posibile către alte
stări. Informația funcției acțiune este reprezentată printr-un pointer la funcție, având în vedere faptul
că acesta este un model de automat finit de tip Moore – funcția de acțiune este generată atunci când
se ajunge într-o stare – depinde doar de stare și nu de intrările în automatul finit.
// function pointer type – for action (output) functions
typedef void (*FSME_PF) (void);
// state type
typedef struct {
FSME_PF Action;
uint8 TransNO;
FSME_TRANS * Trans;
} FSME_STATE;
Figura 3.1.1 Structura de date care descrie o stare pentru un automat finit
(Stan, Botezatu, Panduru, & Lupu, 2009)
Tranzițiile sunt reprezentate de structura tip FSME_TRANS prezentată în Figura 3.1.2.
Această structură conține un pointer la o funcție care returnează o valoare booleană asociată cu
evaluarea unei condiții sau cu apariția unui eveniment. Structura FSME_TRANS conține, de
asemenea, codul stării în care va ajunge automatul finit dacă condiția testată este adevărată sau
evenimentul a avut loc. Prin implementarea condiției sau evenimentului cu o funcție se obține un
grad ridicat de flexibilitate pentru implementare, permițând adaptarea cu ușurință a automatului finit
la cerințele aplicației.

Sisteme de calcul dedicate cu microcontroler
17
// function pointer type – for event update functions
typedef uint8 (*FSME_PF_EV) (void);
typedef struct {
FSME_PF_EV Event;
uint8 NextState;
} FSME_TRANS;
Figura 3.1.2 Structura de date care descrie o tranziție pentru un automat finit
(Stan, Botezatu, Panduru, & Lupu, 2009)
Ultima structură specifică pentru acest model este structura FSME_FSM prezentată în
Figura 3.1.3. Ea cuprinde câmpuri care descriu o instanță a unui automat finit care este executat pe
un sistem dedicat. Structura FSME_FSM conține un indicator care arată dacă automatul finit este
oprit sau dacă este validată execuția acestuia, unul care indică o schimbare a stării automatului finit
și câmpuri care stochează starea curentă, numărul total de stări al automatului finit și o referință la o
tabelă care conține descrierile stărilor și tranzițiilor automatului finit.
// FSM type
typedef struct {
uint8 Enable;
uint8 CurrentState;
uint8 StatesNO;
uint8 StateChanged;
FSME_STATE * States;
uint8 TransNO;
FSME_TRANS * Trans;
} FSME_FSM;
Figura 3.1.3 Structura de date care descrie un automat finit
(Stan, Botezatu, Panduru, & Lupu, 2009)
Un automat finit este format dintr-o mulțime de tabele FSME_TRANS, care conțin
informații despre tranzițiile din fiecare stare și o tabelă FSME_STATE, care conține toate stările
automatului finit și referințele către tabelele de tranziții. De asemenea, o variabila de tip
FSME_FSM este utilizată pentru a memora toate datele și toate referințele necesare ale unui
automat finit (Figura 3.1.4).
Enable CrtState StatesNOState
ChangedStates(table)
Trans(table)
Action TransNOTrans(table)
Action TransNOTrans(table)
…...
TransNO
Event NextState …... Event NextState
Figura 3.1.4 Relațiile structurilor de date care descriu un automat finit
Funcția pentru actualizarea stării curente a automatului finit este principala funcție a
nucleului și este prezentată în Figura 3.1.5. Funcția este apelată cu o referință la o instanță de tip
FSME_FSM a unui automat finit. Se parcurge șirul de tranziții asociat stării curente și se verifică
condițiile asociate cu tranzițiile. Dacă o condiție este adevărată atunci starea curentă a automatului
finit este actualizată în concordanță cu valorile din tabela tranzițiilor aferente sării curente iar
schimbarea de stare este semnalizată prin poziționarea indicatorului StateChanged. Imediat ce o
condiție determină o schimbare de stare, funcția își încheie execuția chiar dacă există și alte condiții
care pot fi adevărate. Această particularitate poate fi folosită în automatele finite complexe pentru a

Sisteme de calcul dedicate cu microcontroler
18
implementa o prioritizare între tranziții, funcție de nevoile aplicației: tranzițiile prioritare sunt
trecute pe poziții cu index mic în tabelă.
/* verificare îndeplinire a condițiilor sau apariție a evenimentelor corespunzătoare tranziției curente*/
(FSME_EVENT_TRUE == _t[ _i ].Event())
/*parcurgere tranziții din starea curentă*/
(; _i < _n ; _i++)
/*actualizare stare curentă*/F->CurrentState = _t[_i].NextState
/*fixare pointer către starea curentă*/_s = &(F->States[F->CurrentState])
/*actualizare tabelă tranziții corespunzătoarestării curente*/
F->Trans = _s->Trans
/*actualizare număr tranziții corespunzător stării curente */
F->TransNO = _s->TransNO
/*actualizare indicator schimbare stare*/F->StateChanged =
FSME_STATE_CHANGED
/*folosire variabilă pentru a indica spre tabela de tranziții din starea curentă*/
_t = F->Trans
/*folosire variabilă pentru stocarea numărului de tranziții din starea curentă */
_n = F->TransNO
start(FSME_UpdateState)
stop(FSME_UpdateState)
TRUE
FALSE
FALSE
TRUE
Figura 3.1.5 Funcția de actualizare a stării curente a unui automat finit

Sisteme de calcul dedicate cu microcontroler
19
În Figura 3.1.6 sunt prezentate: funcția principală a nucleului de automat finit și funcția de
acțiune. FSME_Action execută funcția de acțiune asociată. FSM_Run apelează cele două funcții
prezentate anterior, numai în cazul în care indicatorul Enable al instanței de automat finit F este
setat.
void FSM_Run( FSME_FSM * F ) {
if ( FSME_DISABLE == F->Enable ) {
// may reset the FSM into initial state and deactivate outputs
return;
}
FSME_UpdateState( F );
FSME_Action( F );
}
static void FSME_Action( FSME_FSM * F ) {
F->States[F->CurrentState].Action();
}
Figura 3.1.6 Funcția de execuție a unui automat finit
(Stan, Botezatu, Panduru, & Lupu, 2009)
Funcția FSM_Run poate fi introdusă într-o buclă infinită (i.e. engl. super-loop) pentru
verificarea condițiilor asociate stării curente sau poate fi integrată într-un task executat de către un
sistem de operare în timp real în funcție de nevoile aplicației.
Figura 3.1.7 prezintă două funcții auxiliare ale nucleului: Enable (Activare) și Disable
(Dezactivare). Apelul acestor funcții setează sau resetează în mod corespunzător indicatorul Enable
al instanței F cu care sunt apelate aceste funcții.
void FSM_Enable( FSME_FSM * F ) {
F->Enable = FSME_ENABLE;
}
void FSM_Disable( FSME_FSM * F ) {
F->Enable = FSME_DISABLE;
}
Figura 3.1.7 Funcțiile de activare și dezactivare ale unui automat finit
(Stan, Botezatu, Panduru, & Lupu, 2009)
Aceste funcții oferă posibilitatea activării sau dezactivării de automate finite individuale în
cadrul aplicațiilor software pentru sisteme dedicate. În acest fel este posibilă realizarea unei
proiectări eficiente cu mai multe automate finite, spre exemplu, un model cu automate finite dispuse
și activate ierarhic.
Avantajul acestei abordări nu constă numai în simplitatea și organizarea fluxului execuției
programului, care este bazată pe tabele, ci de asemenea oferă posibilitatea de a completa, șterge sau
actualiza descrierea fiecărei stări, fără a afecta semnificativ alte stări.
Nucleul automatului finit dezvoltat ocupă doar 230 octeți de memorie de cod. Fiecare stare
ocupă 5 octeți de memorie, iar fiecare tranziție consumă 3 octeți de memorie. Structura automatului
finit ocupă 9 octeți de memorie.
3.1.2.2 Evaluarea modelului propus
Pentru a evalua modelul propus al unui automat finit a fost creat un mediu adecvat. Mediul
de evaluare este definit pentru microcontrolere pe 8 biți: familia de microcontrolere ATMega de la
Atmel (Atmel Inc., 2011).
Mediul de evaluare utilizează următoarele componente: un modul de automat finit construit
pe baza modelului propus, un compilator C pentru microcontrolerul ATMega, și simulatorul
integrat în IDE (IAR Systems, IAR Embedded Workbench for Atmel AVR, 2011).
Un automat detector de secvență este implementat prin utilizarea modelului de automat finit
propus. Acest tip de sistem secvențial este o abstractizare folosită în numeroase probleme practice

Sisteme de calcul dedicate cu microcontroler
20
care pot fi rezolvate utilizând modelul automatului finit. Acest automat finit este unul simplu:
implementarea sa, utilizând modelul propus, cuprinde funcții simple pentru verificarea intrării și
generarea acțiunilor corespunzătoare stărilor (i.e. ieșirile automatului). Acestea sunt funcții mai
simple în comparație cu funcția principală FSM_Run a modelului propus. Acest fapt permite o mai
bună estimare a complexității, măsurată în numărul ciclurilor necesare pentru execuția sa, a funcției
FSM_Run, comparativ cu restul codului.
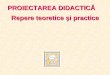
O diagramă a sistemului detector de secvență este prezentată în Figura 3.1.8.
Figura 3.1.8 Automat finit pentru detecția secvenței (0,0,1)
Detectorul de secvență este proiectat să recunoască secvența valorilor binare {0, 0, 1},
prezentă la aplicată secvențial la intrarea sa. Dacă această secvență este prezentă la intrare,
automatul generează valoarea 1 la ieșirea sa. În caz contrar ieșirea are valoarea 0. Graful de fluență
pentru detectorul de secvență este prezentat în Figura 3.1.9.
Figura 3.1.9 Graful de fluență al automatului finit pentru detecția secvenței (0,0,1)
Pentru fiecare stare din graful de fluență este definită o tabelă a tranzițiilor ca în Figura
3.1.10. Fiecare element al acestei tabele are două câmpuri: un pointer la o funcție care evaluează o
condiție sau verifică un eveniment, și starea în care trece automatul finit, dacă condiția este
adevărată sau dacă evenimentul s-a produs.
// state transitions for each state
static __flash FSME_TRANS FSM1_S0_TRANS[] =
{ { FSM1_EventsUpdate0, FSM1_S1 } };
static __flash FSME_TRANS FSM1_S1_TRANS[] =
{ { FSM1_EventsUpdate0, FSM1_S2 },
{ FSM1_EventsUpdate1, FSM1_S0 } };
static __flash FSME_TRANS FSM1_S2_TRANS[] =
{ { FSM1_EventsUpdate1, FSM1_S3 } };
static __flash FSME_TRANS FSM1_S3_TRANS[] =
{ { FSM1_EventsUpdate0, FSM1_S1 },
{ FSM1_EventsUpdate1, FSM1_S0 } };
Figura 3.1.10 Structurile de date care descriu tranzițiile automatului finit
utilizat în detectarea secvenței (0,0,1)
În cazul automatului finit detector de secvență, funcțiile care verifică valoarea variabilei de
intrare sunt prezentate în Figura 3.1.11.
static uint8 FSM1_EventsUpdate0( void ) {
return ( in == 0 );
}
static uint8 FSM1_EventsUpdate1( void ) {
return ( in == 1 );
}
Figura 3.1.11 Funcțiile de verificare ale intrărilor automatului finit

Sisteme de calcul dedicate cu microcontroler
21
Tabela stărilor pentru detectorul de secvență este ilustrată în Figura 3.1.12. Fiecare stare este
descrisă de propria funcție de acțiune, de numărul de tranziții către alte stări și de o tabelă care
conține tranzițiile sub formă de perechi, alcătuite din funcția de verificare a condiției și codul pentru
următoarea stare. // state outputs and transitions; entire table
static __flash FSME_STATE FSM1_STATES[] =
{ { FSM1_ActionClr, 1, FSM1_S0_TRANS},
{ FSM1_ActionClr, 2, FSM1_S1_TRANS},
{ FSM1_ActionClr, 1, FSM1_S2_TRANS},
{ FSM1_ActionSet, 2, FSM1_S3_TRANS}
};
Figura 3.1.12 Structurile de date care descriu stările automatului finit
care detectează secvența (0,0,1)
Funcțiile de acțiune pentru detectorul de secvență sunt prezentate în Figura 3.1.13. Fiecare
funcție de ieșire are două căi de control. Una este pentru acțiuni care sunt executate o singură dată,
la schimbarea stării. Cealaltă cale de control este pentru acțiuni care sunt executate în mod
continuu, atât timp cât automatul finit rămâne în aceeași stare.
static void FSM1_ActionClr( void ) {
if ( FSM1.StateChanged == FSME_STATE_CHANGED ) {
//actions to be executed only once in this state at the state change
out = 0;
// reset state changed flag
FSM1.StateChanged = FSME_STATE_NOT_CHANGED;
}
else { /* actions to be executed continuously in this state */ }
}
static void FSM1_ActionSet( void ) {
if ( FSM1.StateChanged == FSME_STATE_CHANGED ) {
// actions to be executed only once in this state at the state change
out = 1;
// reset state changed flag
FSM1.StateChanged = FSME_STATE_NOT_CHANGED;
}
else { /* actions to be executed continuously in this state */ }
}
Figura 3.1.13 Funcțiile de activare (ale ieșirilor) ale automatului finit
care detectează secvența (0,0,1)
Instanța din automatul finit care implementează detectorul de secvență este prezentată în
Figura 3.1.14.
Câmpurile automatului finit sunt inițializate astfel: automatul finit este activat
(FSME_ENABLE), starea inițială este FSMI_S0, numărul de stări este setat la
FSM1_STATES_NO, indicatorul destinat schimbării de stare este setat la
FSME_STATE_CHANGE, cu scopul de a determina executarea funcției de acțiune pentru starea
inițială și, în cele din urmă, tabelul stărilor este setat la FSM1_STATES. Ultimele două câmpuri
rețin numărul de tranziții din starea inițială (1) și tabelul tranzițiilor pentru starea inițială.
FSME_FSM FSM1 = {
FSME_ENABLE,
FSM1_S0,
FSM1_STATES_NO,
FSME_STATE_CHANGED,
FSM1_STATES,
1,
FSM1_S0_TRANS
};

Sisteme de calcul dedicate cu microcontroler
22
Figura 3.1.14 Structura de date care reprezintă automatul finit
care detectează secvența (0,0,1)
Pentru a evalua performanța implementării au fost proiectate și create multiple configurații
ale aplicației. În acest fel, se poate evalua impactul unor factorilor care țin de mediul de dezvoltare
supra performanței execuției aplicației.
Aplicația care conține automatul finit este creată și compilată în patru configurații diferite:
configurația 1: structurile de date care descriu automatul finit sunt memorate în
SRAM și optimizările compilatorului sunt setate la nivel scăzut;
configurația 2: structurile de date care descriu automatul finit sunt memorate în
SRAM și optimizările compilatorului sunt setate la nivel ridicat;
configurația 3: structurile de date care descriu automatul finit sunt memorate în
FLASH și optimizările compilatorului sunt setate la nivel scăzut;
configurația 4: structurile de date care descriu automatul finit sunt memorate în
FLASH și optimizările compilatorului sunt setate la nivel ridicat.
Cantitatea de memorie utilizată obținută după procesul de compilare al fiecărei configurații
este prezentată în Figura 3.1.15.
Memoria SRAM a microcontrolerului, folosită în aplicațiile software este o resursă
valoroasă. Mărimea sa este, în general, mai mică decât mărimea memoriei FLASH. În diverse
modele se va alege stocarea informației automatului finit în memoria SRAM sau în memoria
FLASH, în funcție de nevoile specifice ale aplicației. Impactul acestei decizii de utilizare a
memoriei asupra detectorului de secvență este prezentată în Figura 3.1.15.
Figura 3.1.15 Resursele de memorie utilizate de implementarea automatului finit
(Stan, Botezatu, Panduru, & Lupu, 2009)
Pentru a putea evalua timpul de execuție al modelului de automat finit s-a dezvoltat un script
pentru simulatorul IAR. Script-ul numără ciclurile scurse între două apeluri succesive ale funcției
FSM_Run (&FSM1). Secvența de intrare utilizată în procesul de simulare are valori care activează
toate tranzițiile posibile ale acestui automat finit.
Media numărului de cicluri obținută după procesul de simulare pentru fiecare configurație
este prezentată în Figura 3.1.16. Numărul de ciclurilor este ușor mai mare în cazul configurațiilor
care au stocat informația automatului finit în memoria FLASH. Acest lucru se întâmplă deoarece
este nevoie de un număr mai mare de cicluri pentru a citi datele din memoria FLASH, în comparație
cu numărul de cicluri necesare pentru a citi datele reținute în memoria SRAM.

Sisteme de calcul dedicate cu microcontroler
23
Figura 3.1.16 Timpul de execuție a implementării automatului finit
(Stan, Botezatu, Panduru, & Lupu, 2009)
Script-ul de simulare evaluează și numărul de cicluri necesare fiecărei tranziții realizate în
decursul procesului de simulare. Numărul de cicluri pentru fiecare tranziție din configurația 2 este
prezentat în Tabelul 3.1.1 și pentru cei din configurația 4 este prezentat în Tabelul 3.1.2.
Tabelul 3.1.1 Numărul de cicluri pentru tranzițiile automatului finit în configurația 2
(Stan, Botezatu, Panduru, & Lupu, 2009)
Stare curentă /
Stare următoare S0 S1 S2 S3
S0 156 202 0 0
S1 239 0 202 0
S2 0 0 156 203
S3 239 202 0 0
Tabelul 3.1.2 Numărul de cicluri pentru tranzițiile automatului finit în configurația 4
(Stan, Botezatu, Panduru, & Lupu, 2009)
Stare curentă /
Stare următoare S0 S1 S2 S3
S0 160 216 0 0
S1 255 0 216 0
S2 0 0 160 217
S3 255 216 0 0
Această particularitate poate fi utilizată în validarea tabelei de tranziții pentru un automat
finit. În tabelele anterioare, valoarea zero semnifică absența execuției tranziției respective, iar o
valoare diferită de zero denotă că tranziția respectivă s-a realizat în timpul procesului de simulare și
durata sa este egală cu numărul de cicluri notat în tabel. Valorile timpilor de execuție pot fi folosite
ca o informație despre execuția corectă a automatului finit. Valorile acestea pot fi utilizate ulterior
la implementarea unor mecanisme de verificare a corectitudinii execuției automatului finit.
3.1.3 Automat finit cu mecanism de siguranță
3.1.3.1 Implementare
Se continuă dezvoltarea modelului anterior prin modificarea modelului de automat finit cu
implementarea unui mecanism de siguranţă (Stan, Botezatu, & Vieriu, 2009). Operarea sigură este
un aspect esenţial în sistemele de calcul dedicate complexe. Pentru a atinge un nivel ridicat de
siguranţă, o metodă este validarea temporală a valorilor intrărilor în automatul finit şi a ieșirilor

Sisteme de calcul dedicate cu microcontroler
24
generate de automat. Implementarea propusă include o verificare a timpului pe care un automat îl
petrece în fiecare stare, ceea ce previne ca automatul finit să aştepte la nesfârşit o condiţie pentru a
realiza o schimbare de stare şi să menţină ieşirile active mai mult decât este necesar sau decât este
sigur.
Implementarea trebuie să fie eficientă din punctul de vedere al încărcării memoriei şi al
timpului de execuţie.
Modelul de nucleu propus pentru un automat finit cu mecanism de siguranță este definit de
stările, evenimentele sau condiţiile care declanşează tranziţia dintre stări, de funcţiile care activează
sau dezactivează ieșirile şi de valorile timpului maxim de staționare în fiecare stare.
Fiecare stare este descrisă de tipul de date FSME_STATE, prezentat în Figura 3.1.17 , care
conţine informaţii despre funcţia de activare, tranziţiile din această stare şi o valoare de temporizare
care limitează intervalul de timp pentru care automatul finit poate rămâne în starea curentă.
Informaţiile pentru funcţia de activare sunt reprezentate de un pointer la funcţie asociat unei stări,
având în vedere faptul că modelul de automat finit este pentru automate de tip Moore.
// function pointer type – for action (output) functions
typedef void (*FSME_PF) (void);
// function pointer type – for transition checking
typedef uint8 (*FSME_PF) (void);
// state type - describes a FSM state using the following fields:
// Action – a pointer to an action (output) function
// Event – a pointer to function that checks the conditions that may
trigger a transition from the current state;
// TimeOut – the maximum ammount of time that the FSM is allowed to stay
in the current state
typedef struct {
FSME_PF Action;
FSME_PF_EV Event;
uint16 TimeOut;
} FSME_STATE;
Figura 3.1.17 Structura de date care descrie starea unui automat finit
cu mecanism de siguranță (Stan, Botezatu, & Vieriu, 2009)
Tranziţiile din starea curentă sunt determinate de câmpul Event al structurii FSME_STATE.
Acest membru este un pointer la o funcţie care verifică toate evenimentele şi condiţiile care pot
declanşa o tranziţie din starea curentă. Dacă se declanşează o tranziţie prin apariţia unui eveniment
sau a unei condiţii adevărate, funcţia Event schimbă codul stării curente cu codul pentru următoarea
stare în care va ajunge automatul finit.
Tipul de structură pentru modelul de automat finit este FSME_FSM prezentată în Figura
3.1.18. Structura constă dintr-un indicator care semnalează o schimbare în starea automatului finit şi
din câmpuri care descriu: starea curentă, starea de siguranţă în care ajunge automatul finit în cazul
expirării timpului de staționare într-o stare, o referință la o tabelă care conţine stările automatului
finit şi un index pentru un timer folosit pentru contorizarea timpului petrecut în starea curentă.
// FSM type - describes a FSM using the following fields:
typedef struct {
uint8 Enable;
uint8 StateChanged;
uint8 CurrentState;
uint8 SafeState;
FSME_STATE * States;
uint8 TimerIdx;
} FSME_FSM;
Figura 3.1.18 Structura de date care descrie un automat finit cu mecanism de siguranță
(Stan, Botezatu, & Vieriu, 2009)

Sisteme de calcul dedicate cu microcontroler
25
/*verificare schimbare de stare*/_n != FSME_NO_STATE_CHANGE
/*actualizare stare curentă*/F->CurrentState = _n
/*fixare variabilă cu noua stare a automatului finit*/
_n = F->States[F->CurrentState].Event();
start(FSME_Run)
stop(FSME_Run)
FALSETRUE
/*actualizare indicator schimbare stareg*/F->StateChanged =
FSME_STATE_CHANGED
/*repornire a contorului de timp*/timer_RestartTimer10ms(
F->TimerIdx,
F->States[ F->CurrentState ].TimeOut );
/*verificare contor de timp pentru starea curentă*/TRUE == timer_CheckTimer10ms( F->TimerIdx )
/*actualizare stare curentă*/F->CurrentState = F->SafeState
/*actualizare indicator schimbare stare*/F->StateChanged =
FSME_STATE_CHANGED
/*repornire a contorului de timp*/timer_RestartTimer10ms(
F->TimerIdx,
F->States[ F->CurrentState ].TimeOut );
/*Apelare funcție de acționare (ieșire) corespunzătoare stării curente*/
F->States[ F->CurrentState ].Action()
FALSE
TRUE
Figura 3.1.19 Funcția de execuție pentru un automat finit cu mecanism de siguranță
Orice apelare a funcţiei FSME_Run, prezentată în Figura 3.1.19, verifică mai întâi dacă
automatul finit este activat sau nu. Dacă este activat, funcţia FSME_Run verifică apoi dacă starea
s-a schimbat prin apelarea funcţiei Event pentru starea curentă. Dacă starea automatului finit s-a
schimbat, starea curentă este actualizată în consecinţă şi contorul (engl. timer) pentru măsurarea
timpului petrecut în starea curentă este resetat la valoarea corespunzătoare noii stări. Dacă starea
automatului finit rămâne neschimbată, funcţia FSME_Run verifică dacă valoarea de contorului
pentru starea curentă indică o depășire. În acest caz automatul finit intră într-o stare de siguranţă. În
această stare se poate iniţia un ciclu de oprire în siguranță a sistemului dedicat. La sfârşitul funcţiei
FSME_Run este apelată funcţia Action pentru starea curentă.
3.1.3.2 Evaluarea modelului propus
Pentru a evalua modelul de automat finit propus s-a creat un mediu special pentru acest
scop. Mediul de evaluare este pentru microcontrolere pe 8 biţi: familia de controlere ATMega de la
Atmel.

Sisteme de calcul dedicate cu microcontroler
26
Mediul de evaluare foloseşte următoarele componente: un modul de automat finit construit
cu modelul propus, un compilator C pentru microcontrolerele ATMega (IAR Systems, IAR
Embedded Workbench for Atmel AVR, 2011), şi simulatorul integrat în IAR IDE.
Un detector de secvenţă (pentru secvența 0,0,1), prezentat în Figura 3.1.20, este implementat
folosind modelul de automat finit propus. Revenirea în ciclul normal de funcționare din starea S4 de
eroare (în care se ajunge după depășirea timpului maxim de staționare într-una din stările S0, …,
S3) se poate face după scurgerea unui interval de timp, sau după intervenția explicită a operatorului
sistemului controlat de acest automat.
Figura 3.1.20 Graful de fluență al automatului finit cu mecanism de siguranță
pentru detecția secvenței (0,0,1)
Scenariul de simulare calculează de asemenea numărul de cicluri necesare pentru fiecare
tranziţie care a apărut în timpul operării procesului de simulare. Numărul de cicluri pentru fiecare
tranziţie a automatului finit este prezentat în Tabelul 3.1.3. Acest tabel poate fi folosit de asemenea
pentru a verifica corectitudinea implementării.
Modulul implementat ocupă doar 156 octeți din memoria de cod. Pentru implementarea
detectorului de secvenţă memoria folosită este de 147 octeți memoria de cod (plus 156 octeți pentru
bibliotecă) şi 7 octeți de memorie date.
Tabelul 3.1.3 Numărul de cicluri pentru tranzițiile automatului finit cu mecanism de siguranță
(Stan, Botezatu, & Vieriu, 2009)
Stare curentă /
Stare următoare S0 S1 S2 S3 S4
S0 126 146 0 0 179
S1 147 0 146 0 0
S2 0 0 126 147 0
S3 147 146 0 0 0
S4 0 0 0 0 121

Sisteme de calcul dedicate cu microcontroler
27
3.2 Bibliotecă de funcții pentru criptare
Securitatea este necesară pentru un număr tot mai mare de sisteme dedicate. Progresul
tehnologic care a dat naştere acestor sisteme electronice a impus şi o tendinţă de creştere a
complexităţii atacurilor pentru subminarea securităţii. Numărul tot mai mare de încercări de
exploatare a lacunelor din sistemele de asigurare a securității informaţiilor, a motivat creşterea
efortului de securizare a sistemelor electronice. Sistemele dedicate folosite la achiziţia, stocarea,
manipularea şi procesarea datelor de o natură sensibilă, ridică câteva provocări unice şi interesante
din punct de vedere al securităţii. Securitatea a făcut subiectul cercetării în domenii precum
criptografia şi ştiinţa calculatoarelor şi a reţelelor de calculatoare. Cu toate acestea, securitatea este
de obicei omisă sau interpretată ca o funcţie anexă în procesul de proiectare al sistemelor dedicate.
În realitate, securitatea ar trebui sa reprezinte o nouă metrică în procesul de proiectare alături de
cost, performanţe şi puterea consumată.
Pentru aceste sisteme există câţiva factori care translează considerentele de securitate dintr-o
perspectivă central-funcţională spre o problemă de proiectare arhitecturală (hardware și software):
Un sistem dedicat trebuie să fie sigur chiar şi când poate fi accesat fizic sau logic de
entităţi neautorizate. Rezistenţa la astfel de atacuri poate fi asigurată doar dacă
sistemul a fost proiectat pentru asemenea cazuri.
Posibilităţile de procesare ale multor sisteme dedicate sunt uşor depăşite de nevoile
computaţionale ale modulelor de securitate, acest lucru ducând la compromisuri
indezirabile între securitate şi cost sau securitate şi performanţă.
Sistemele alimentate de la baterie (şi dispozitivele cu constrângeri de dimensiuni) în
general operează cu resurse limitate, precum capacitatea bateriei, spaţiul de stocare,
capacitatea de procesare, acestea fiind suprasolicitate de cerinţele impuse prin
securitate.
Sistemele dedicate trebuie să fie suficient de flexibile pentru a se adapta evoluţiei
rapide a mecanismelor de securitate.
Proiectarea sistemelor care iau în considerare eficienţa energetică reprezintă o provocare
pentru arhitecturile de sisteme de calcul dedicate (De Bosschere, et al., 2007).
3.2.1 Metode de criptare
Pentru modelul de securizare propus există două tipuri de metode pentru securizarea
informațiilor transferate:
metoda de generare a cheii de sesiune;
metoda de transfer de date.
Figura 3.2.1 prezintă generarea cheii de sesiune şi metoda de schimb. O sesiune este iniţiată
atunci când sistemului i se adaugă un nou nod. De asemenea, atunci când nodul adăugat schimbă
dinamic metoda de criptare folosită, pe baza cerinţelor de energie, este necesară o nouă cheie de
criptare, care necesită în consecinţă o nouă sesiune de generare a cheii de criptare. Schimbarea
frecventă a cheii de criptare pentru sesiunile de comunicație poate să crească rezistența la atacuri a
comunicațiilor de date dintre sisteme.

Sisteme de calcul dedicate cu microcontroler
28
Figura 3.2.1 Metoda de generare a cheii de criptare pentru o sesiune de comunicație
(Stan & Botezatu, 2009)
Nodurile sistemului au o cheie iniţială (K). Această cheie este setată o dată la prima utilizare
a sistemului şi poate fi resetată în mod regulat de către administratorul de sistem. Atunci când este
iniţiată o nouă sesiune, nodul master (Nodul A) creează două chei: K1 şi K2. Aceste chei pot fi
numere aleatorii pe 64 de biţi calculate folosind un algoritm de generare și o sămânță dedusă dintr-o
expresie care include valori provenite de la o intrare neconectată a unui modul ADC, temperatura
mediului ambiant şi ceasul de timp real.
Prima etapă a metodei de schimb constă în criptarea valorii lui K1 cu cheia inițială K; datele
codificate obţinute (C1) vor fi transmise nodului B printr-un canal de comunicație nesecurizat. În a
doua etapă, K2 este criptat cu cheia K şi datele codificate rezultate (C2) sunt codificate cu cheia K1
generată anterior. Datele rezultate (C3) sunt, de asemenea, transmise receptorului prin intermediul
unei conexiuni nesecurizate. Ultimele două etape ale procesului se desfăşoară pe nodul B. După ce
are loc recepţionarea datelor C1, se iniţiază etapa a treia. Această etapă constă în decriptarea lui C1
cu ajutorul cheii K, rezultând cheia K1. Apoi, în ultima etapă, datele C3 recepţionate sunt decriptate
folosindu-se cheia K1; datele rezultate, C2, sunt decodificate cu cheia K pentru a obţine cheia K2.
Toate datele transmise ulterior în cadrul sesiunii sunt criptate şi decriptate cu cheia de sesiune K2.
Figura 3.2.2 Metoda pentru schimbul de date
(Stan & Botezatu, 2009)
Initial known Key Initial known Key
EK(K1)=C1
EK1(C2)=C3
EK(K2)=C2
Key generation
System administrator
DK(C1)=K1
DK1(C3)=C2
DK(C2)= K2
Session key: K2
K1
K2
KK
C2
C1
C3
C2
K
KK1
Node A (Master) Node B (Slave)
Initial known Key Initial known Key
EK(K1)=C1
EK1(C2)=C3
EK(K2)=C2
Key generation
System administrator
DK(C1)=K1
DK1(C3)=C2
DK(C2)= K2
Session key: K2
K1
K2
KK
C2
C1
C3
C2
K
KK1
Node A (Master) Node B (Slave)
Session key: K2 Session key: K2
EK(d)=Cd1
DK2(Cd2)=d2
Data
DK2(Cd1)=d1
EK2(d2)=Cd2
Data
d1
K2Cd1
Cd2
d2
K2
Node A (Master) Node B (Slave)
K2
K2Session key: K2 Session key: K2
EK(d)=Cd1
DK2(Cd2)=d2
Data
DK2(Cd1)=d1
EK2(d2)=Cd2
Data
d1
K2Cd1
Cd2
d2
K2
Node A (Master) Node B (Slave)
K2
K2

Sisteme de calcul dedicate cu microcontroler
29
Metoda schimbului de date este prezentată în Figura 3.2.2. Cele două noduri de comunicație
au aceeaşi cheie de sesiune, K2, generată conform pașilor descriși anterior. Procesele de criptare și
decriptare au la bază această cheie, deoarece datele care traversează canalul nesecurizat sunt
codificate la sursă şi decodificate la sistemul destinaţie prin folosirea cheii K2.
3.2.2 Algoritmi de criptare
Algoritmii de criptare reprezintă fundamentul metodelor de criptare. Metodele de criptare
propuse folosesc algoritmii de criptare pentru managementul datelor sensibile.
Codificarea datelor este procesul care transformă reprezentarea din text simplu a valorilor
într-o reprezentare prin text codificat, utilizând un algoritm de criptare selectat şi o cheie secretă
folosită de algoritm.
Managementul datelor sensibile se referă îndeosebi la procesul de management al cheii,
incluzând: generarea cheii, protocolul de schimbare a cheii şi algoritmul de codificare folosit pentru
criptarea cheii.
În scopurile menţionate, au fost selectați şi implementați doi algoritmi de criptare: FEAL
(Fast Data Encipherment Algorithm – Algoritm de Criptare Rapidă a Datelor) şi DES (Data
Encryption Standard – Standard de Criptare a Datelor). Ambii algoritmi sunt algoritmi de criptare
simetrici cu cheie privată care operează pe blocuri de date
Pentru multe aplicații, acest tip de algoritmi de criptare corespund necesităţilor de
comunicație a sistemelor dedicate datorită structurii orientate pe blocuri a datelor comunicate. De
asemenea, lungimea blocului pentru algoritmii de criptare este un bun echivalent al (sau un mic
număr de multipli ai) volumului de date comunicate.
3.2.3 Evaluarea implementării algoritmilor de criptare
Implementarea algoritmilor de criptare se desfăşoară potrivit următoarelor reguli pentru
minimizarea consumului de resurse: se evită lucrul cu şiruri de octeți, folosindu-se în schimb tipuri
de date întregi suportate de arhitectură (e.g. întregi pe 32 de biţi) şi de compilator (e.g. întregi pe 64
de biţi); se evită utilizarea multor funcţii: se evită transmiterea parametrilor şi secvenţele frecvente
de apel și revenire din funcție.
Pentru implementarea şi evaluarea algoritmilor de criptare, s-a folosit o platformă de
dezvoltare cu un microcontroler ARM Coretx-M3 STM32F103RB (ST Microelectronics, 2011) şi
compilatorul CrossWorks pentru ARM (Rowley Associates, 2011).
Numărul de cicluri pentru execuția algoritmilor de criptare este prezentat în Tabelul 3.2.1 şi
în Tabelul 3.2.2. Valorile pentru numărul de cicluri sunt calculate pentru diferite lungimi ale datelor
criptate şi pentru numere diferite de runde pe care algoritmul le execută pentru criptarea datelor.
După cum s-a specificat anterior, algoritmii de decriptare şi cei de criptare sunt identici, cu
deosebirea că subcheile sunt aplicate etapelor interne în ordine inversă. Acest aspect face ca
algoritmii de decriptare să aibă acelaşi număr de cicluri pentru operațiile de criptare și decriptare. Tabelul 3.2.1 Numărul de cicluri pentru execuția algoritmului de criptare DES (Stan & Botezatu, 2009)
Lungimea blocului
de date
Numărul de runde de criptare
2 4 8 16
64 bit 2040 31652 54152 99152
128 bit 40745 63681 109552 201296
256 bit 81147 126179 216244 396372
Tabelul 3.2.2 Numărul de cicluri pentru execuția algoritmului de criptare FEAL (Stan & Botezatu, 2009)
Lungimea blocului
de date
Numărul de runde de criptare
8 16 32
64 bit 1818 3615 6765
128 bit 3696 7032 13536
256 bit 7315 13870 27242

Sisteme de calcul dedicate cu microcontroler
30
Calcularea numărului ciclurilor permite măsurarea directă a timpului de execuţie. Aceste
tabele conţin informaţii pe care o aplicaţie le poate utiliza pentru a estima timpul de execuţie
necesar pentru un algoritm de criptare şi, prin urmare, energia necesară pentru execuţia algoritmului
respectiv. Prin utilizarea informaţiilor din tabelele anterioare, o aplicaţie poate selecta dinamic
algoritmul pe care să-l lanseze în execuţie pentru a cripta sau decripta date. Selecţia se face în baza
bugetului de energie al sistemului, astfel încât să se asigure o perioadă de funcţionare cât mai
îndelungată.
Tabelele prezentate anterior conţin informaţii care stau la baza implementării sistemelor care
monitorizează consumul de energie pe durata perioadei de execuție.
Au fost măsurați, de asemenea, timpii de execuţie pentru diferite versiuni de algoritmi de
criptare DES şi FEAL (i.e. diferite lungimi ale blocului de date procesat) în condițiile utilizării unei
frecvenţe a ceasului de 72MHz pentru microcontroler. Pentru măsurarea acestor valori s-a utilizat
un timer intern al microcontrolerului. Valorile timpului de execuţie sunt calculate pentru diferite
lungimi de date criptate şi pentru diferite numere de runde pe care algoritmul le execută în vederea
codificării datelor. Valorile măsurate sunt prezentate în Figura 3.2.3 şi Figura 3.2.4.
Figura 3.2.3 Timpul de execuție pentru criptarea unui bloc da date cu algoritmul DES
(Stan & Botezatu, 2009)
Figura 3.2.4 Timpul de execuție pentru criptarea unui bloc de date cu algoritmul FEAL
(Stan & Botezatu, 2009)
În continuare este prezentat un scenariu tipic de consum de energie bazat pe metodele
descrise. Acesta implică folosirea algoritmului DES16 în procesul de criptare sau decriptare a cheii
de sesiune şi transmiterea unei secvenţe de date pe 16 biţi criptate cu FEAL8. Cele trei etape de
decriptare necesare la începutul sesiunii solicită 297456 de cicluri pentru a fi executate.
Următoarele date pe 128 de biţi necesită 3696 de cicluri pentru realizarea criptării. La un consum, în
starea normală de funcționare (i.e. nu în moduri de consum redus de energie), de 38,1 mA @ 3,3V

Sisteme de calcul dedicate cu microcontroler
31
pentru ARM Cortex-M3 (cu funcţionare la o frecvență de 72MHz), energia folosită pentru
generarea cheii de sesiune este de 126 mW în 4,14 ms, față de cele 56 de microsecunde necesare
pentru codificarea propriu-zisă a datelor.
3.2.4 Arhitectură pentru securizarea sistemelor dedicate
În figura Figura 3.2.5 este descris un model de arhitectură pentru securizarea sistemelor
dedicate (Botezatu, Manta, & Stan, 2010). Arhitectura are la bază trei blocuri funcţionale: Detecţie
(engl. Sensing), Analiză (engl. Analysis) şi Execuţie (engl. Enforcement). Seturile de date de intrare
sunt reprezentate de Starea sistemului (engl. System status - SS), Descriptorii sistem (engl. System
descriptors - SD) şi Scopurile sistem (engl. System goals - SG).
BLOCURI
FUNCȚIONALE
Detecție Analiză
Execuție
Stare SistemScopuri
Sistem
Descriptori
Sistem
HW SW
Mediu
Reacție
Securitate adaptivă
Cerere de
reevaluare
Cerere de
reconfigurare
Figura 3.2.5 Blocurile componente ale arhitecturii de securitate
(Botezatu, Manta, & Stan, 2010)
Modul de funcţionare este următorul: când blocul de detecţie identifică o schimbare la
nivelul parametrilor definiţi în seturile de date, acesta semnalează blocul de analiză, care la rândul
lui încearcă să determine ce modificări trebuie aduse la nivelul securităţii pentru a satisface cerinţele
definite de către SG. Apoi, blocul de execuţie aplică modificările necesare sistemului.
3.2.4.1 Starea sistemului
Starea sistemului poate fi privită ca o valoare unică, definită de un set specific de parametri.
Aceştia pot fi clasificaţi ca parametrii interni, respectiv externi, unde cei interni sunt specifici
configuraţiei hardware a sistemului (e.g. blocuri funcţionale ale sistemului care pot influenţa starea)
şi aplicaţiilor care se execută pe acesta (e.g. cerinţele hardware ale aplicaţiei).
3.2.4.2 Descriptorii sistem
Descriptorii sistem sunt reprezentaţi de o colecţie de date care descriu componentele
hardware şi software ale sistemului. Datele sunt organizate ierarhic, pe baza unei colecţii de clase
care descrie şi grupează elementele sistemului funcţie de proprietăţile de consum şi de securitate.
Modelul de bază pentru această ierarhie este prezentat în Figura 3.2.6. Primele trei nivele realizează
o clasificare generală a componentelor sistemului, de la nivelul patru, în jos, fiind derivate clase
care descriu componentele (e.g. de pe ramura surselor de energie – engl. energy suppliers – pot fi
derivate noi clase care să descrie baterii, celule fotovoltaice etc.).
Clase specifice
Clase de bază
Descriptori HW Descriptori SW
Consumatori de
energie (EC)
Surse de
energie (ES)
Aplicațiile
sistemului (SA)
Primitivele de
securitate (SP)
EC1 ... ECx ES1 ... ESy SA1 ... SAz SP1 ... SPt
Obiecte care descriu
componentele
sistemului
Figura 3.2.6 Ierarhia descriptorilor sistem
(Botezatu, Manta, & Stan, 2010)

Sisteme de calcul dedicate cu microcontroler
32
3.2.4.3 Scopurile sistem
Scopurile sistem sunt determinate pe baza corelaţiilor dintre resursele energetice ale
sistemului şi necesarul de securitate. Pe baza discrepanţei dintre cererea de resurse şi
disponibilitatea lor în sistemele dedicate, scopurile sistemului sunt determinate ţinând seama de
costul de implementare al securităţii (exprimat în energie consumată) şi de gradul de flexibilitate al
implementării (cât mai multe primitive şi metode de securitate). Scopurile sistem trebuie descrise ca
o maximizare a timpului de operare prin menţinerea unui nivel adecvat de securitate în sistem.
3.2.4.4 Blocul de detecţie
Blocul de detecţie monitorizează starea sistemului. Stările în care se poate afla sistemul sunt
definite ca elemente ale unui set finit S = {s1, s2, …, sn}, acestea fiind determinate pe baza
combinaţiilor şi corelaţiilor dintre parametrii de mediu (starea sistemului) şi descriptorii sistem.
Când apare o tranziţie de stare, acest bloc decide dacă trebuie trimisă o cerere de reevaluare a
securităţii către blocul de analiză.
3.2.4.5 Blocul de analiză
Acest bloc primeşte cereri de reevaluare a securităţii de la blocul de detecţie, pe baza
modificărilor stării sistemului. Funcţie de SG şi de noua stare a sistemului, acesta decide care
componente ale securităţii trebuie modificate.
3.2.4.6 Blocul de execuţie
Acest bloc primeşte cereri de reconfigurare a securităţii de la modulul de analiză şi încearcă
să aplice modificările necesare. Rezultatul (succes sau eşec) este transmis blocului de analiză. Dacă
cererea de reconfigurare nu poate fi satisfăcută, blocul de analiză trebuie să propună alte alternative
de securitate.
3.2.5 Exemplu de utilizare a metodei propuse
Pentru a demonstra eficiența unei arhitecturi adaptive pentru securizarea unui sistem dedicat
s-a realizat următorul experiment.
Platforma hardware utilizată are un microcontroler ARM Coretx M3 alimentat de la baterii
NiMH de capacitate 2000mAh. Microcontrolerul reprezintă principalul consumator de energie al
sistemului dedicat. Metrica utilizată pentru estimarea consumului de energie a sistemului dedicat
este reprezentată de gradul de descărcare al bateriei (engl. DoD – Depth of Discharge) exprimat în
procente.
Fiecare aplicație utilizează un anumit algoritm de criptare funcție de modul de operare (unde
este cazul) și de DoD. Algoritmii folosiți pentru acest experiment sunt DES8, DES16 și FEAL.
Stările în care se poate găsi sistemul la un moment dat sunt prezentate în Tabelul 3.2.3.
Pentru acest experiment, procesul de securizare al aplicațiilor executate constă în criptarea a
80 de octeți de date de către fiecare aplicație într-o fereastră de timp de 29 milisecunde. Timpul care
rămâne din această fereastră după efectuarea tuturor operațiilor de criptare este petrecut de
microcontroler într-un mod de consum scăzut de energie. Caracteristicile relevante pentru evaluarea
consumului de energie ale algoritmilor de criptare sunt prezentate în Tabelul 3.2.4.
Tabelul 3.2.3 Stările sistemului (Botezatu, Manta, & Stan, 2010)
Aplicație
Executată
Stare baterie
(DoD)
Stare
sistem
Cerințe
de securitate
A1m1 - S1 A1 → DES16
A1m2 - S2 A1 → DES
A1m1
&
A2
< 50% S3 A1 → DES16
A2 → DES8
≥ 50% S4 A1 → DES16

Sisteme de calcul dedicate cu microcontroler
33
A2 → FEAL
A1m2
&
A2
< 50% S5 A1 → DES
A2 → DES8
≥ 50% S6 A1 → DES
A2 → FEAL
Tabelul 3.2.4 Caracteristicile algoritmilor de criptare (Botezatu, Manta, & Stan, 2011)
Algoritm de
criptare
Durată execuție
algoritm criptare
64 bit data (µsec)
Grad de utilizare
al microprocesorului(%)
Putere
(mW)
DES16 1380 47,57 22,05
DES8 775 26,72 15,67
FEAL 53 1,83 8,05
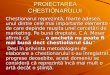
În Figura 3.2.7 este prezentată variația consumului de energie a sistemului pentru o perioadă
de 60 de minute. Sistemul trece prin toate stările posibile. În primele 16 minute și 15 secunde este
executată doar aplicația 1, apoi este executată și aplicația 2. După încă 15 minute și jumătate nivelul
DoD crește peste 50% determinând schimbarea stării sistemului.
În Figura 3.2.8 este prezentată energia consumată de sistem pe durata celor 60 de minute ale
experimentului. Se constată o scădere cu 31% a energiei consumate de arhitectura adaptabilă față de
situația în care s-ar fi utilizat doar cel mai sigur și cel mai complex algoritm de criptare (DES16)
pentru securizarea întregului sistem.
Pu
tere
(m
W)
Timp (minute)
Figura 3.2.7 Variația consumului de energie pentru scenariul propus (Botezatu, Manta, & Stan, 2010)
Ener
gie(
J )
Timp (minute )
Securitate adaptivă DES16
Figura 3.2.8 Energia consumată de sistem (Botezatu, Manta, & Stan, 2010)
Adaptarea nivelului de securizare al sistemelor dedicate la condițiile de mediu și la
necesarul aplicațiilor poate conduce la reducerea semnificată a necesarului de energie pentru
îndeplinirea funcțiilor sistemului.

Sisteme de calcul dedicate cu microcontroler
34
3.3 Conversie de cod în virgulă mobilă în cod în virgulă fixă
Operațiile cu numere reprezentate în virgulă mobilă nu sunt executate în mod eficient pe
sistemele dedicate. Capabilitățile de calcul ale microcontrolerelor folosite în sisteme dedicate sunt
în general reduse şi, în cele mai multe cazuri, nu este prezent în sistem nici un suport hardware
pentru operaţiile în virgulă mobilă. Pentru a depăşi această problemă, funcţia matematică conţinută
în codul cu virgulă mobilă trebuie să fie exprimată folosind codul în virgulă fixă. Făcând acest lucru
manual – adică, rescrierea funcţiei cu virgulă mobilă într-o secvenţă de operaţii cu numere în
virgulă fixă poate fi o sarcină dificilă și predispusă la erori.
Este prezentată în continuare o metodă de conversie (i.e. transformare) a expresiilor
aritmetice cu operanzi reprezentați în virgulă mobilă în expresii echivalente cu operanzi reprezentați
în virgulă fixă. Metoda poate fi utilizată în programe pentru procesarea digitală a semnalelor (engl.
DSP – Digital Signal Processing) sau în aplicațiile pentru sisteme dedicate (Bârleanu, Băitoiu, &
Stan, 2011). Înlocuirea expresiilor cu operanzi reprezentați în virgulă mobilă cu operaţii specializate
cu numere reprezentate în virgulă fixă (i.e. numere întregi) poate îmbunătăţi foarte mult
performanţa aplicaţiilor pentru sisteme DSP sau sisteme dedicate. Aceasta este o abordare nouă și
metoda este dezvoltată numai pentru expresii care descriu filtre Direct-Form I cu coeficienţi
constanţi şi variabile de intrare ale căror limite de variație inferioare și superioare sunt cunoscute.
Metoda prezentată poate construi soluţii multiple în virgulă fixă pentru acelaşi cod inițial în
virgulă mobilă: de la „complexitate-ridicată-acurateţe-ridicată” la „complexitate-scăzută-acurateţe-
scăzută”. O funcţie de cost conduce deciziile de transformare ale fluxului de date. Prin schimbarea
coeficienţilor funcţiei de cost se pot obţine forme diferite ale expresiei în virgulă fixă.
Transformarea fluxului de date nu este costisitoare ca timp de transformare. Codul în virgulă fixă
generat este testat pe microprocesoare de 8 biţi (AVR ATmega), 16 biţi (MSP430) şi 32 biţi (ARM
Cortex-M3). Acesta oferă, în toate cazurile, o viteză de execuţie mai bună decât dacă utilizarea
codul în virgulă mobilă.
3.3.1 Proiectarea aplicației de conversie a codului
Metoda prezentată este proiectată să transforme produsele scalare cu coeficienţi constanţi
(i.e. literali) reprezentați în virgulă mobilă şi variabile reprezentate în virgulă fixă a căror intervale
de variație sunt cunoscute:
∑
Un flux de date este reprezentat sub forma unei structuri arborescente. Următoarele tipuri de
noduri sunt utilizate pentru a reprezenta fluxul de date:
noduri independente (i.e. noduri terminale – noduri frunză) : noduri ale căror valori
nu depind de valorile altor noduri. Nodurile independente sunt utilizate pentru a
reprezenta constante și variabile: ai, și xi;
operatori (i.e. operații): adunare, înmulţire, deplasare (i.e. scalare) şi schimbarea
semnului. Un operator are unul sau mai mulţi operanzi (i.e. noduri fiu). Aceştia pot fi
noduri independente sau alţi operatori.
Un nod are un interval asociat şi o lungime a părții fracționare a cuvântului pe care îl
reprezintă (engl. FWL – Fractional Word Length). Intervalul reprezintă valorile întregi extreme la
execuție a nodului pe care îl descrie (e.g. variabilă în memorie sau într-un registru al
microcontrolerului).
Scalarea unui nod este o operaţie frecventă întâlnită în procesul de optimizare. FWL-ul unui
nod este o valoare în virgulă fixă. O operație de scalare nu schimbă valoarea în virgulă fixă (sau
reală) a unui nod. Intervalul nodului este întotdeauna alterat împreună cu FWL a nodului.
Un nod poate fi reprezentat în cod ca o valoare întreagă de 16 sau 32 biţi. Valorile care sunt
procesate la nivelul unui nod (i.e. „trec prin nod”) trebuie să aibă cât mai mulţi biţi semnificativi
pentru a oferi precizie, dar, pe de altă parte, trebuie să fie limitate la un interval specific pentru a

Sisteme de calcul dedicate cu microcontroler
35
evita apariția depășirilor în nodul curent sau ulterior în alte noduri ale fluxului de date. FWL-ul nu
este în mod necesar acelaşi pentru fiecare nod.
Metoda proiectată pentru transformarea codului este implementată într-o aplicație Java
datorită suportului pe care îl oferă limbajul Java pentru programarea orientată pe obiecte şi a IDE-
urilor avansate disponibile.
3.3.2 Transformarea fluxului de date
3.3.2.1 Dificultatea problemei
Forma iniţială a fluxului de date reprezintă o imagine fidelă a expresiei produsului scalar în
virgulă mobilă. Există un operator de adunare cu N noduri fiu de tipul un operator de multiplicare
pentru fiecare termen aixi cu două noduri fiu, câte unul pentru fiecare operand.
Manipularea intervalului unui nod care reprezintă un coeficient al filtrului este simplu și se
poate realiza la momentul conversiei fluxului de date.
Manipularea intervalului unui nod care reprezintă un operator este mai complicată. De
exemplu: într-un nod de multiplicare nu există depășire, dar se dorește micșorarea intervalului
deoarece în nodul imediat de mai sus (i.e. nodul părinte) există depășire. Se poate micșora intervalul
din nodul de înmulțire pe două căi:
se poate renunța la un LSB din constanta k (Figura 3.3.1);
se poate introduce un operator de scalare (i.e. deplasare) între mul și add (Figura
3.3.2).
Figura 3.3.1 Modificarea fluxului de date
prin ajustarea unei constante la momentul transformării
Figura 3.3.2 Modificarea fluxului de date
prin inserarea unui operator de deplasare (scalare)
Fiecare soluţie are propriul său impact asupra complexităţii computaţionale a fluxului de
date şi asupra acurateţei.
Tabelul 3.3.1 Caracteristici ale modificărilor fluxului de date
Tip modificare Complexitate Interval eroare (SQNR)
Figura 3.3.1 Deplasare efectuată la momentul
conversiei fluxului de date
Nu introduce operații suplimentare la
Deplasare aplicată coeficienților (literali)
Provoacă pierderi mari de precizie

Sisteme de calcul dedicate cu microcontroler
36
execuție
Figura 3.3.2 Deplasare la execuție
Introduce operații suplimentare la
execuție
Deplasare aplicată operatorilor
Provoacă pierderi mici de precizie
Din Tabelul 3.3.1 se constată că fiecare modificare are avantaje și dezavantaje. Alegerea
aplicării uneia sau alteia dintre modificări se face utilizând o funcție de cost prezentată ulterior în
acest capitol.
3.3.2.2 Complexitatea computaţională
Un nod al fluxului de date are o complexitate computaţională asociată. Aceasta este un
estimator al efortului de calcul necesar pentru obţinerea valorii nodului în timpul execuției. La
momentul proiectării este dificilă evaluarea complexităţii computaţionale exacte. Aplicaţia
proiectată numără pur şi simplu operațiile conţinute în suprafaţa fluxului de date de sub nodul ţintă.
Aceasta este o aproximare destul de bună. O aproximare mai bună se poate obține dacă se asociază
un cost fiecărui tip de operație la execuție. O metrică potrivită pentru acest cost poate fi considerată
numărul de cicluri necesari pentru efectuarea respectivei operații.
3.3.2.3 Intervalul erorii de nod
Fiecare nod al fluxului de date reprezintă o valoare cu virgulă fixă care poate varia în cadrul
unui interval specific. Acest interval face referire la valoarea nodului la execuție, care este în esenţă
o valoare întreagă apropiată de valoarea ideală cu precizie infinită. Astfel, fiecare nod are o eroare
specifică. Intervalul valorii cu precizie infinită care poate „trece prin” nod, şi intervalul întreg
corespunzător de la execuție, pot fi calculate la momentul conversiei, ceea ce înseamnă că, pentru
fiecare nod, intervalul erorii poate fi obţinut fără a executa efectiv codul.
Intervalul erorii pentru nodul unui operator poate fi calculat prin utilizarea unui interval
întreg propriu şi intervalul erorii pentru fiecare nod fiu (Kearfott, 1996). Spre exemplu, intervalul
erorii unui nod de adunare poate fi calculat prin sumarea erorii intervalului pentru fiecare nod fiu.
Valorile limitelor inferioară și superioară pentru un interval de eroare sunt considerate a fi
valori absolute; nu valori relative (engl. ulps – units in last place) (Goldberg, 1991).
3.3.2.4 Căutare multiobiectiv
Cea mai simplă metodă de scădere sau de creştere a intervalului întreg al unui nod este de a
realiza o operaţie de deplasare. Aceasta poate fi realizată la momentul transformării dacă nodul
reprezintă o valoare constantă sau la execuție dacă nodul reprezintă un operator şi, foarte important,
intervalul întreg nu generează depășire pentru oricare tip de dată (e.g. short, int sau long). Dar
acestea nu sunt cazuri frecvente. Situaţia cea mai frecventă este atunci când un operator generează
depăşire iar intervalul său întreg trebuie scăzut. Problema este că intervalul întreg al unui operator
nu poate fi schimbat în mod direct – intervalele întregi ale nodurilor fiu trebuie să fie alterate.
Pentru a forţa intervalul întreg al unui nod de adunare este necesară forţarea intervalului întreg al
fiecărui nod de tip fiu (AND logic). Pentru a forţa intervalul întreg al unui nod de multiplicare este
necesară forţarea unuia sau a mai multor noduri de tip fiu (OR logic).
Pentru a compara diferitele soluţii simultane este necesară combinarea, pentru fiecare
soluţie, a complexităţii şi a intervalului de eroare într-un singur indicator. Pentru a face acest lucru,
se utilizează o funcţie liniară de cost :
Variind coeficienţii funcţiei de cost este ca şi când, spre exemplu, ar fi favorizate soluţii care
introduc operații suplimentare la execuție, dar care dau rezultate de precizie mare în locul soluţiilor
de tip „complexitate-scăzută-acurateţe-scăzută”.
În Figura 3.3.3, costul unei soluţii este direct proporţional cu cea mai scurtă distanţă până la
linia funcţiei de cost. Coeficientul de complexitate (k1) şi coeficientul de eroare (k2) determină

Sisteme de calcul dedicate cu microcontroler
37
împreună panta liniei funcţiei de cost. Sunt utilizaţi doi coeficienţi deoarece altfel ar fi imposibil să
se reprezinte linia verticală (panta + INF). Pentru simplitate, suma coeficienţilor de cost este
menţinută constantă:
k1 + k2 = 1
Funcție de cost
Complexitate
Eroare
«
« Soluție 1 (optimă)
Soluție 2
Figura 3.3.3 Spațiul soluțiilor (Bârleanu, Băitoiu, & Stan, 2011)
Complexitatea și eroarea (i.e. intrările în funcția de cost) calculate în timpul conversiei
fluxului de date sunt mărimi obținute pe cale analitică (Figura 3.3.4). Alți autori estimează eroarea
prin simulare obținând valori mai precise dar timpul de conversie crește foarte mult. Metoda
propusă folosește doar estimări analitice. Acest lucru nu influențează negativ rezultatele deciziilor
luate pe parcursul conversiei deoarece valorile analitice reflectă relațiile dintre valorile reale.
Mărime
interval eroare
Număr
operatori
Valori analitice
Număr de
cicli
SQNR,
Distribuția erorii
Valori reale
Figura 3.3.4 Intrări în funcția de cost
3.3.2.5 Exemplu de transformare
Figura 3.3.5 arată două structuri de flux de date extreme obţinute pentru un produs scalar cu
9 termeni.
a. b.
Figura 3.3.5 Fluxuri de date obținute pentru o expresie cu 9 termeni
a. „complexitate-scăzută-acurateţe-scăzută” şi b. „complexitate-ridicată-acurateţe-înaltă”

Sisteme de calcul dedicate cu microcontroler
38
3.3.3 Tehnici folosite în proiectarea aplicației
3.3.3.1 Informaţii cache ale nodurilor
Procesul de optimizare utilizează în mod intensiv unele atribute ale nodurilor precum
intervalul întreg şi intervalul erorii. Pentru nodurile operator, aceste informaţii depind de nodurile
tip fiu (i.e. operanzi) şi trebuie calculate. Timpul necesar pentru acest lucru poate fi semnificativ
pentru fluxurile mari de date – nodurile de pe nivelele superioare pot genera foarte multe apeluri
ulterioare către noduri de pe nivelele inferioare pentru a obţine informaţiile necesare. În acest scop,
fiecare nod operator este proiectat cu propriul cache.
Figura 3.3.6 arată timpul de execuţie pentru procedura de optimizare a produselor scalare cu
diferite lungimi (se utilizează informaţiile din cache ale nodului).
Ordinul filtrului
mili
secu
nd
e
Timpul necesar pentru transformarea unui filtru FIR
Complexitate scăzută, acuratețe scăzută
Complexitate ridicată, acuratețe ridicată
Figura 3.3.6 Timpi de transformare pentru fluxuri de date generate aleator
3.3.3.2 Căutarea automată a fluxurilor de date
Variația coeficienţilor funcţiei de cost conduce la structuri diferite ale fluxului de date.
Coeficienţii pot fi setaţi manual dar acest lucru nu este foarte practic, deoarece coeficienţii în sine
nu poartă foarte multe informaţii, exceptând cazurile extreme. Într-o situaţie concretă, ar fi de dorit
să se genereze toate fluxurile de date posibile, crearea de coduri pentru toate şi mai târziu selectarea
funcţiei care este cea mai convenabilă.
3.3.4 Generarea codului
Generarea codului C în virgulă fixă pentru un flux de date particular este, în esenţă, simplă.
Cu toate acestea, există două aspecte importante: declararea variabilelor intermediare şi conversiile
de tip explicite.
Codul C poate fi generat în două forme diferite: ca o secvenţă lungă de operații scurte (i.e. o
operație pe fiecare parte dreaptă) şi o mulţime de variabile intermediare sau ca o singură expresie
aritmetică, foarte lungă şi o mulţime de paranteze. Deşi ambele forme de cod sunt echivalente ca
rezultat calculat, prima variantă poate fi utilizată în scopuri de depanare, deoarece toate variabilele
intermediare sunt declarate şi pot fi urmărite pas cu pas.
3.3.5 Evaluarea metodei propuse
3.3.5.1 Acurateţe
Când este generată o funcţie C în virgulă fixă, intervalul de eroare al rezultatului său este
deja cunoscut. Acesta este indicatorul cazului celui mai defavorabil calculat la transformare –
intervalul erorii nodului rădăcină a fluxului de date.

Sisteme de calcul dedicate cu microcontroler
39
Eroarea este considerată ca diferenţa dintre valoarea în virgulă mobilă obţinută cu expresia
originală în virgulă mobilă (i.e. valoarea de referinţă) şi valoarea întreagă obţinută cu codul generat
în virgulă fixă.
Un indicator de precizie relevant este raportul semnal zgomot (SQNR) calculat cu media
valorilor de referinţă absolute (S) şi cu media valorilor de eroare absolute (N) (Cilio & Corporaal,
1999):
(
)
Figura 3.3.7 ilustrează acurateţea şi complexitatea soluţiilor care sunt găsite (automat)
pentru un produs scalar cu 24 termeni. Acurateţea este reprezentată ca diferenţa dintre SQNR cel
mai mare posibil (ideal) şi SQNR al codului generat. SQNR cel mai mare posibil este definit ca
SQNR al unei funcţii care ar returna întregul cel mai apropiat de valoarea ideală în virgulă mobilă.
Complexitate (număr de operatori)
Alt
erar
e SQ
NR
(d
B)
Figura 3.3.7 Soluţiile găsite pentru un produs scalar cu 24 termeni,
coeficienţi aleatorii în intervalul [-1, 1] şi variabile în intervalul [0,4095] (Bârleanu, Băitoiu, & Stan, 2011)
SQNR se micşorează pe măsură ce numărul de termeni ai produsului scalar creşte şi, în mod
special, coeficientul complexității crește în funcția de cost.
3.3.5.2 Timpul de execuție
Timpul de execuţie al codului generat în virgulă fixă depinde de mai mulţi factori:
Structura filtrului. Numărul nodurilor fluxurilor de date este direct proporţional cu
dimensiunea filtrului. Acest lucru este valabil înainte şi după ce fluxul de date este
optimizat.
Funcţia de cost. Variaţia coeficienţilor de cost conduce la decizii de transformare
specifice a fluxurilor de date.
Generarea codului. Dacă codul în virgulă fixă este generat ca o expresie foarte
lungă (i.e. pe o singură linie), atunci cele mai multe valori intermediare sunt alocate
în registre şi, de fapt, numărul operaţiunilor de transfer (engl. load/store) este
micşorat. Acest lucru este în mod special important atunci când nu se aplică nici o
optimizare în procesul de compilare.
Compilatorul. Activarea optimizărilor compilatorului poate accelera foarte mult
codul în virgulă fixă. Acest lucru merită să fie luat în considerare mai ales atunci
când sunt declarate variabile intermediare.
Microprocesorul. Capacităţile microprocesorului nu sunt considerate în detaliu,
deoarece scopul principal este generarea codului independent de platformă. Singura
ipoteză considerată este că nu există unităţi de virgulă mobilă, fapt caracteristic
microprocesoarelor din sisteme dedicate. Unele seturi de instrucţiuni includ
împărțirea întreagă (operația de împărțire se poate utiliza în locul deplasării la
dreapta pe biți), dar nu este o caracteristică generală şi nu este considerată.

Sisteme de calcul dedicate cu microcontroler
40
În Tabelul 3.3.2 este prezentat raportul timpilor de execuție dintre niște fluxuri de date
transformate față de expresiile originale în virgulă mobilă.
Tabelul 3.3.2 Factorul de creștere al performanțelor funcție de microcontroler, compilator și
dimensiunea expresiei produsului scalar (Bârleanu, Băitoiu, & Stan, 2011b)
Microcontroler/
Compilator
Dimensiune produs scalar (număr de termeni)
4 5 8 10
ATMega16/IAR 14,97 14,99 14,60 14,66
STM32/gcc 11,44 10,96 11,25 11,59
LPC1768/IAR 9,51 10,01 10,37 10,86
LM3S3748/IAR 7,15 7,42 7,55 7,76
Factorul de creștere al performanțelor dintre codul în virgulă fixă și codul în virgulă mobilă
poate varia într-un interval larg. O cauză foarte importantă este funcţia de cost folosită în întreaga
optimizare a fluxului de date. Pentru soluţiile de tip „complexitate-ridicată-acurateţe-ridicată”,
viteza poate fi crescută de cel puţin 3 ori. Rezultatele prezentate sunt obţinute cu produsele scalare
cu virgulă fixă cu 4-10 termeni generaţi în mod aleatoriu.
3.3.5.3 Utilizarea memoriei
Codul cu virgulă fixă necesită în general puţin mai mult spaţiu de memorie de cod (e.g.
memorie Flash) decât codul în virgulă mobilă dacă nu sunt utilizate iterații.
Utilizarea SRAM (memorie de date) este determinată în principal de spațiul necesar
variabilelor locale (i.e. alocate pe stivă). Codul în virgulă fixă, dacă este generat ca o singură
expresie aritmetică (i.e. fără variabile intermediare) nu utilizează aproape nici un spaţiu de stocare
pe stivă. Codul în virgulă mobilă necesită un anumit spațiu de stocare deoarece apelează funcții ale
compilatorului pentru emularea operațiilor cu virgulă mobilă.
3.4 Concluzii
În acest capitol au fost prezentate trei module software utilizate pentru dezvoltarea de
aplicații pentru sisteme de calcul dedicate.
Modulul pentru implementarea unui model computațional de tip automat finit este proiectat
pentru a fi generic și ușor de adaptat la cerințele specifice automatelor finite dintr-o aplicație
concretă. Modelul de automat finit este augmentat și cu un mecanism de siguranță care
monitorizează timpul petrecut într-o stare și realizează o tranziție către o stare de siguranță în cazul
depășirii unui interval de timp.
Modulul pentru implementarea de metode se securizare a sistemelor dedicate este proiectat
pentru a folosi un număr de algoritmi de criptare cu diverși parametri de funcționare (e.g. număr de
runde de criptare). Utilizarea diferiților algoritmi de criptare în funcție de nevoile de securizare și
parametrii mediului de operare (e.g. gradul de descărcare al bateriei) ai unui sistem dedicat poate
conduce la o creștere a autonomiei (i.e. perioada de funcționare fără schimbarea bateriei) sistemului.
Aplicația pentru conversia implementării unei expresii aritmetice din utilizarea reprezentării
în virgulă mobilă în reprezentare în virgulă fixă este proiectată având în vedere o funcție de cost
care exprimă compromisul între complexitatea implementării și acuratețea rezultatului obținut.
Toate modulele au fost evaluate cu privire la eficiența implementării, considerându-se
metrici precum dimensiunea memoriei utilizare, numărul ciclurilor necesare execuției sau energia
consumată în diverse scenarii de utilizare.

41
4 Sisteme de calcul dedicate cu circuite digitale reconfigurabile
4.1 Sisteme reconfigurabile
Sistemele de calcul pot rezolva problemele de calcul prin două implementări diferite ale
algoritmilor: în hardware sau în software (Bobda, 2007). Alegerea unei variante de implementare se
face considerând criterii potrivite și relevante pentru aplicația particulară considerată: costul
sistemului, posibilitatea de reprogramare sau reconfigurare după producție, mediul în care este
integrat sistemul și altele.
Criteriile care pot fi avute în vedere conduc la câteva tipuri de arhitecturi, fiecare optimizată
pentru a oferi performanțe într-un anumit sens:
Arhitecturi de uz general (engl. general purpose) (e.g. microprocesoare,
microcontrolere);
Arhitecturi proiectate pentru un anumit domeniu (clasă de probleme) (engl. domain
specific) (e.g. DSP – Digital Signal Processor);
Arhitecturi specifice proiectate pentru o singură aplicație (engl. application specific)
(e.g. ASIC – Application Specific Integrated Circuit).
Dacă se cunoaște a priori clasa de algoritmi care urmează să fie executată, este posibilă
modificarea arhitecturii sistemului de calcul astfel încât să existe o potrivire mai bună între
implementările algoritmilor și resursele de calcul ale arhitecturii. În acest caz se obține o arhitectură
de sistem de calcul potrivită pentru un anumit domeniu (sau clasă de probleme). Calea de date a
unei astfel de arhitecturi este modificată pentru a implementa în mod optim un set de operații
comun aplicațiilor din domeniul respectiv. DSP-urile sunt exemple de arhitecturi de
microprocesoare din această categorie. DSP-urile sunt proiectate pentru sarcini de calcul repetitive
și intensive întâlnite în procesarea semnalelor și sunt utilizate în telecomunicații, aplicații
multimedia și alte aplicații. Cea mai frecvent menționată caracteristică arhitecturală a unui circuit
DSP este capacitatea acestor microprocesoare de a executa una sau mai multe operații de tip
multiplicare-adunare într-un singur ciclu. De asemenea, datorită caracterului repetitiv al calculelor
aplicațiilor de procesare de semnale, circuitele DSP folosesc îmbunătățiri arhitecturale care permit
execuția eficientă a buclelor de program.
Dacă un sistem de calcul execută doar o singură aplicație cunoscută a priori atunci este
posibilă proiectarea arhitecturii sistemului de calcul astfel încât să permită o execuție foarte
eficientă a aplicației respective și numai a acestei aplicații. Această variantă de arhitectură poate fi
descrisă ca adaptarea hardware-ului la aplicația executată. Spre exemplu, în procesările multimedia
este necesară codarea respectiv decodarea semnalelor procesate conform cu standarde bine definite.
Aceste procese trebuie implementate eficient (cu viteză de execuție mare și cu latență mică) și ca
atare s-au proiectat circuite de tip codec special proiectate pentru acest tip de procesare.
Microprocesoarele care realizează doar un anumit tip de procesare se numesc ASIP (engl.
Application-specific instruction-set processor) și sunt implementate în mod uzual cu circuite de tip
ASIC (engl. Application Specific Integrated Circuit).

Sisteme de calcul dedicate cu circuite digitale reconfigurabile
42
Pentru o anumită aplicație, la un moment dat, structura spațială a sistemului se modifică
pentru a permite implementarea și folosirea celor mai potrivite resurse pentru execuția aplicației.
Circuitele FPGA reprezintă baza tehnologică pentru implementarea arhitecturilor de calcul
reconfigurabile, oferind premizele pentru construirea de sisteme de calcul evolutive (Sekanina,
2003). Flexibilitatea circuitelor FPGA poate fi exploatată și prin implementarea de sisteme capabile
să detecteze sau să tolereze defectele (Bolchini, Miele, & Sandionigi, 2011).
4.2 Spatial computing
Există astăzi multe arhitecturi de circuite integrate digitale care includ în structura lor un
microprocesor fix cuplat la o structură reconfigurabilă. Acest fapt oferă mai multe opțiuni pentru
alocarea sarcinilor de calcul sau de control pe una dintre cele două infrastructuri existente. Sarcinile
de control pot fi alocate pe microprocesor deoarece poate implementa decizii complexe și
neregulate (i.e. neuniforme) iar sarcinile de calcul care sunt mai uniforme și au nevoie de viteză de
procesare mai ridicată pot fi alocate pe structura reconfigurabilă (Steiner, Shenoy, Isaacs, &
Pellerin, 2006).
Codul original executat pe microprocesor poate fi partiționat pentru a fi executat fie pe
microprocesor, fie pe structura reconfigurabilă la diverse nivele de granularitate: funcție, buclă sau
bloc de instrucțiuni. Nivelul de granularitate se alege funcție de resursele structurii reconfigurabile,
de costul interconectării și al comunicațiilor dintre microprocesor și structura reconfigurabilă.
4.3 Structură pentru monitorizarea timpului de execuție al subprogramelor
Multe sisteme dedicate sunt folosite pentru a implementa aplicații critice din punct de
vedere al siguranței și care trebuie să răspundă la cerințe de timp real. Cerințele de timp real sunt
derivate din caracteristicile funcționale ale sistemului fizic controlat de aplicație.
Se prezintă în continuare proiectarea unui modul digital (denumit watchdog), care poate fi
inclus în microprocesoare din sisteme dedicate sau în sisteme cu resurse reconfigurabile pentru a
asigura o mijloc de detecție și semnalare a nerespectării caracteristicilor de timp a aplicațiilor
executate (Stan, Panduru, & Ungureanu, 2010). Monitorizarea comportamentului temporal este
realizată prin măsurarea timpului de execuție a subprogramelor (i.e. rutinelor, funcțiilor) și
compararea rezultatelor cu valori de referință. Modulul implementat nu presupune modificări ale
structurii interne a arhitecturii microprocesoarelor din sisteme dedicate și poate fi de asemenea
folosit în sisteme fără cerințe stricte de timp real. În aceste sisteme se pot implementa mecanisme de
verificare a securității funcționării prin care se detectează diverse condiții anormale de operare care
sunt observabile prin alterarea timpului de execuție al subprogramelor (e.g. inserția codului unui
virus sau apariția de întreruperi externe prea frecvente).
4.3.1 Studii similare
Există numeroase preocupări de cercetare care prezintă metode de verificare a corectitudinii
execuției codului pe microprocesoare prin utilizarea de diverse îmbunătățiri arhitecturale.
În lucrarea (Mahmood & McCluskey, 1988), autorii prezintă conceptul de microprocesor
watchdog și evidențiază unele implementări disponibile la momentul respectiv. Un microprocesor
watchdog este un coprocesor care prin monitorizarea comportamentului procesorului primar
realizează detectarea de erori la nivelul sistemului. Informația utilizată de microprocesorul
watchdog pentru a detecta erorile de funcționare poate fi: modelul de accesare al memoriei, fluxul
de control al execuției aplicațiilor, semnalele de control, sau plauzibilitatea rezultatelor calculate.
Funcționarea unui microprocesor watchdog are două faze. În prima fază, procesorului watchdog îi

Sisteme de calcul dedicate cu circuite digitale reconfigurabile
43
sunt furnizate niște informații despre care descriu funcționarea corectă a procesorului care urmează
să fie verificat iar în cea de-a doua fază acesta colectează informațiile relevante concomitent cu
funcționarea procesorului primar. Detectarea erorilor este realizată prin compararea informațiilor
obținute în timpul execuției cu informația de referință furnizată inițial.
Pentru structura de monitorizare propusă este utilizată aceeași bază teoretică dar, informația
despre corectitudinea operării este furnizată de timpul de execuție al subprogramelor.
Pentru ca arhitectura originală să poată utiliza mecanismele adăugate pentru detectarea
erorilor, toate soluțiile prezentate anterior includ un model sau metodologie de proiectare (engl.
design flow) dedicată.
4.3.2 Arhitectura structurii de monitorizare
Modulul de monitorizare (watchdog – WDT) este conectat la magistrala de adresă și la
magistrala de instrucțiuni ale microprocesorului, așa cum se arată în Figura 4.3.1. Operarea
anormală este semnalată prin generarea unor semnale de control precum reset, întrerupere sau NMI
(întreruperi nemascabile) sau prin generarea unor coduri de instrucțiuni adecvate pe magistrala de
instrucțiuni.
INT/
NMI
MCUMEMEORIE
DE COD
WATCHDOG
M
U
X
MAGISTRALA
ADRESE
INSTRUCȚIUNE
INS
TR
UC
ȚIU
NE
WD
T
SE
LC
ȚIE
RST
Figura 4.3.1 Arhitectura structurii de monitorizare (Stan, Panduru, & Ungureanu, 2010)
Modulul de monitorizare este construit prin utilizarea următoarelor structuri de date și
algoritmi.
Stiva watchdog (WS) este o structura de date de tipul ultimul intrat - primul ieșit care
memorează adresele de început ale subprogramelor apelate. Vârful stivei watchdog conține adresa
de start a ultimului subprogram apelat. Această structură de date este folosită pentru a extrage cu
ușurință adresa de start a ultimului subprogram accesat atunci când este detectată pe magistrala de
instrucțiuni o instrucțiune de revenire din funcție (i.e. return).
Măsurarea timpului de execuție este realizată cu ajutorul unui tablou de contoare (engl.
timers); fiecare contor poate fi selectat individual cu scopul de a-i reseta valoarea sa internă, sau de
a-i activa sau dezactiva funcționarea (i.e. de contorizare). Fiecărui subprogram monitorizat îi
corespunde un contor pentru măsurarea timpului de execuție. Numărul de contoare implementate
limitează numărul de subprograme monitorizate simultan, dar se poate alege convenabil pentru a se
potrivi cerințelor aplicației.
Modulul watchdog folosește un tabel, numit tabelul cu informații despre monitorizare (engl.
MIT – Monitoring Info Table) care conține informații despre comportamentul temporal anticipat,
pentru toate subprogramele, sau, numai pentru cele critice, funcție de cerințele aplicației. Tabelul
conține adresa de start a subprogramelor monitorizate, indexul timer-ului din tabloul de contoare
utilizat pentru a monitoriza comportamentul temporal și valorile pentru patru parametri care descriu
comportamentul temporal al subprogramului, așa cum este prezentat în Figura 4.3.2:

Sisteme de calcul dedicate cu circuite digitale reconfigurabile
44
0 time
Limita inferioară
Timp execuție
pentru cazul cel
mai favorabil
Limita superioară
Timp execuție
pentru cazul cel
mai defavorabil
Variația timpului de
execuție
Toleranța pentru
cazul cel mai
favorabil
Toleranță pentru
cazul cel mai
defavorabilTÂRZIUDEVREME
Interval acceptabilInacceptabil Inacceptabil
Figura 4.3.2 Parametrii de timp monitorizați, (Stan, Panduru, & Ungureanu, 2010)
Aceste valori definesc cinci posibile intervale de timp pentru execuția unui subprogram, așa
cum se arată în Figura 4.3.2. Intervalul de timp acceptabil pentru execuție este definit de diferența
dintre UTB și LTB. Toate celelalte valori pentru timpul de execuție mai mari decât UTB sau mai
mici decât LTB sunt inacceptabile pentru sisteme cu cerințe de timp real sau pot indica un
comportament temporal anormal.
Modulul watchdog monitorizează magistrala de adrese pentru memoria cod și instrucțiunea
extrasă din memoria cod. Modulul decodează instrucțiunea cu scopul de a detecta instrucțiunile de
apel de subprograme și instrucțiunile de revenire corespunzătoare.
Atunci când se detectează o nerespectare a intervalului de timp, se declanșează un mecanism
de tratare a acestei situații. Există trei posibile mecanisme de gestionare:
Resetarea microprocesorului – acesta este metoda uzuală pe care o utilizează un
modul watchdog clasic;
Emiterea unei întreruperi NMI sau INT spre microprocesor – această metodă poate fi
utilizată dacă un mecanism de tratare este implementat în software ca o rutină de
tratare pentru întreruperea NMI sau INT;
Inserarea unei instrucțiuni sau a unei secvențe de instrucțiuni în microprocesor –
instrucțiunile inserate pot fi un apel sau un salt la o rutină de gestionare.
Modulul watchdog utilizează un automat finit pentru a controla operațiile necesare
funcționării sale. Intrările automatului finit sunt semnale de condiție generate de operații logice între
valorile WS, MIT, magistrala de adrese, magistrala de instrucțiuni, așa cum este explicat în
continuare. Ieșirile automatului finit sunt semnale de control. Funcționarea automatului finit de
control al modului watchdog este ilustrată în Figura 4.3.3
IDLETMR
STA
EXP
TMR
STP
Condiții
C1 Detecție adresă rutină
monitorizată în instrucțiunea CALL
C2 Pornire timer
C3 Instrucțiune RET pentru cea
mai recent apelată rutină
C4 Oprire timer
C5 Timer expirat SAU
Instrucțiune RET prea devreme
C6 Excepție executată
C1
C2
C3
C4
C5 C6
Figura 4.3.3 Automatul finit pentru controlul structurii de monitorizare
(Stan, Panduru, & Ungureanu, 2010)
Dezvoltarea unei aplicații care folosește această arhitectură de monitorizare trebuie să
urmeze un anumit model de dezvoltare. Prima dată se proiectează și implementează software-ul.
Pentru generarea modulului de monitorizare, subprogramele critice trebuie să fie determinate iar
apoi trebuie calculate caracteristicile lor cu privire la timpul de execuție. Acestea pot fi obținute
utilizând analiza statică sau prin testări repetate (Wilhelm, et al., 2008). Cu ajutorul informațiilor
din această fază, modulul de monitorizare poate fi generat, și, împreună cu aplicația, se
implementează arhitectura finală. Etapele procesului de proiectare sunt reprezentate în Figura 4.3.4.

Sisteme de calcul dedicate cu circuite digitale reconfigurabile
45
Proiectare și
implementare
aplicație SW
Determinare
rutine critice
Estimare timp
execuție
Simulare Testare
Compilare
aplicație SW
Generare modul
de monitorizare
Generare
arhitectură
Figura 4.3.4 Proiectarea unui sistem care utilizează structura de monitorizare
(Stan, Panduru, & Ungureanu, 2010)
4.3.3 Evaluarea structurii de monitorizare
Modulul de monitorizare implementat oferă un mecanism care permite verificarea dinamică
a comportamentului temporal al subprogramelor.
Pentru a evalua modulul de monitorizare, s-a utilizat o platformă de dezvoltare cu circuitul
FPGA Spratan3E de la Xilinx și un microprocesor soft-core cu structură simplă (Figura 4.3.5),
PicoBlaze (Xilinx Inc., PicoBlaze 8-bit Embedded Microcontroller User Guide, 2011). Acesta este
realizat și optimizat de Xilinx pentru FPGA-urile sale. S-au creat două scenarii: în primul s-a
sintetizat doar PicoBlaze-ul și în al doilea s-a extins primul scenariu cu includerea modulului
watchdog. Costul pentru implementarea celor doua scenarii este prezentat în Tabelul 4.3.1.
Figura 4.3.5 Schema bloc pentru microcontrolerul Picoblaze (Xilinx Inc., PicoBlaze 8-bit Embedded
Microcontroller User Guide, 2011)
S-a observat că modulul de monitorizare implementat utilizează substanțial mai multe
resurse în comparație cu microprocesorul. Acest fapt poate fi explicat de simplitatea procesorului
soft-core și prin faptul că acesta este puternic optimizat pentru implementare în FPGA-ul folosit.
Modulul de monitorizare utilizează numeroase resurse de memorie pentru a implementa stiva,
pentru a stoca informațiile relevante cu privire la timpul de execuție pentru fiecare subprogram
monitorizat, și, de asemenea, pentru contoarele de timp. Modulul utilizează resurse logice cu scopul
de a implementa comparatoare mari și numeroase pentru logica de comparație a adreselor de pe
magistrala de adrese cu adresele de început a funcțiilor monitorizate stocate în modulul watchdog.

Sisteme de calcul dedicate cu circuite digitale reconfigurabile
46
Tabelul 4.3.1 Resursele utilizate de structura de monitorizare
(Stan, Panduru, & Ungureanu, 2010)
Resurse Picoblaze Picoblaze cu modul WDT
Slice Flip Flops 76 129
4 input LUTs 176 411
Occupied slices 98 236
Frecvență (MHz) 116.136 93.092
Poate fi de asemenea observată degradarea frecvenței maxime de operare. Acest fapt este o
consecință a existenței unei căi critice în implementarea modulului de monitorizare. Aceasta poate
fi eliminată prin reproiectarea stivei sau prin specificarea unor constrângeri adiționale în procesul de
sinteză sau chiar prin schimbarea instrumentelor de sinteză.
În cazul procesoarelor mai complexe, este de așteptat ca resursele suplimentare necesare
pentru implementarea modulului de monitorizare să fie mai puțin semnificative relativ la resursele
logice necesare implementării procesorului.
4.4 Structură pentru monitorizare a execuției aplicațiilor pe un MPSoC
MPSoC (engl. MultiProcessor System on Chip) sunt arhitecturi de calcul care utilizează
unități de procesare multiple în acelaşi circuit integrat pentru a furniza nivelul dorit de performanţă
şi disipare de putere pentru aplicaţiile executate. Structurile de tip MPSoC sunt atractive deoarece
permit executarea de aplicaţii complexe, formate din mai multe procese. Procesele sunt executate
simultan pe unitățile de procesare disponibile ale structurii MPSoC şi realizează schimbul de date
utilizând resursele de memorie care pot fi organizate ca zone tampon (engl. buffer) cu model de
acces de tip FIFO. Aplicaţiile pot avea constrângeri de timp real, iar în acest caz orice abatere de la
timpul de procesare alocat pentru un proces poate afecta negativ calitatea serviciului furnizat de
sistem.
Este prezentată o metodă care poate fi utilizată pentru a detecta abateri de la timpul de
procesare alocat proceselor într-un MPSoC (Stan, Valachi, & Bârleanu, 2011). Unitățile de
procesare ale structurii MPSoC sunt augmentate cu o structură de monitorizare care urmăreşte
evenimentele din infrastructura de comunicație din interiorul MPSoC. Toate transferurile de date
sunt monitorizate, iar parametrii lor de timp sunt comparați cu un comportament de referinţă
aşteptat.
Complexitatea unui MPSoC şi a aplicaţiilor executate fac dificilă analiza comportamentului
în timp a sistemului şi a predictibilităţii în momentul proiectării. Fluxul datelor dintr-o aplicaţie de
procesare a datelor este descris folosind grafuri de fluență aciclice, așa cum este prezentat în Figura
4.4.1.
Aplicație 2
Aplicație 1
Task 1 Task 2
Task 1 Task 2
Task 3
intrare ieșire
intrare ieșire
Figura 4.4.1 Model de descriere a aplicațiilor executate pe un MPSoC
prin grafuri aciclice (Stan, Valachi, & Bârleanu, 2011)

Sisteme de calcul dedicate cu circuite digitale reconfigurabile
47
Aplicaţiile pot interfera din cauza resurselor partajate ale unui MPSoC şi astfel pot apărea
conflicte la accesul resurselor. Interferenţa poate cauza modificarea comportamentului temporal al
aplicaţiilor. Pentru a elimina aceste conflicte pot fi furnizate mai multe resurse . Această soluţie ar
mări costul părții hardware a sistemului.
Comportamentul în timp al aplicaţiilor poate de asemenea fi modificat de către variaţiile
frecvenţei ceasului (e.g. cauzate de către variaţiile de temperatură din diverse părți ale circuitului)
sau de către unele defecte hardware.
Ţinând cont de motivele menţionate anterior, este necesară proiectarea unei structuri de
monitorizare pentru monitorizarea comportamentului temporal al aplicaţiilor executate pe o
platformă de calcul de tip MPSoC.
4.4.1 Arhitectura sistemului MPSoC
4.4.1.1 Hardware
În Figura 4.4.2 este prezentată arhitectura modulului microprocesor pe o platformă MPSoC.
Un modul al unui sistem MPSoC are mai multe componente. Modulul microprocesor execută codul
aplicaţiilor. Este utilizat microprocesorul Microblaze de la Xilinx (Xilinx Inc., MicroBlaze Soft
Processor Core, 2011), întreaga platformă MPSoC fiind implementată într-un circuit FPGA Xilinx
Virtex6 .
Microprocesor
Monitor
Timer
Rețea de interconectare NoC
PLB
EDI
Modul
microprocesor
Domeniu de clock al
modulului microprocesor
Variable
processor
clock domain
FSL
INT
Domeniu de clock al NoC
DMAs
Memorie
LocalăVFCU
FSL
clk
DTL DTL
LMB
DTL
Figura 4.4.2 Arhitectura modulului microprocesor pe o platformă MPSoC
(Stan, Valachi, & Bârleanu, 2011)
Memoria locală este utilizată pentru stocarea codului și a datelor proceselor locale. Memoria
are un port LMB (Xilinx Inc., Local Memory Bus, 2011) pentru realizarea de tranzacţii cu
microprocesorul. Memoria are două zone: una este accesibilă doar pentru microprocesor prin LMB,
iar cealaltă zonă este utilizată ca memorie de comunicație (CMEM). Această zonă a memoriei este
mai departe împărţită în memorie de comunicație pentru fluxul de ieșire (CMEM OUT) şi memorie
de comunicație pentru fluxul de intrare (CMEM IN), după cum este detaliat în Figura 4.4.3.
Memoria de comunicație este accesibilă pentru tranzacţiile DMA care transferă datele între nodurile
de procesare ale unui MPSoC. Fiecare aplicaţie care are alocate procesele pe un modul
microprocesor are o unitate DMA şi o zonă de memorie de comunicație. Modulele DMA sunt
conectate la magistrala PLB (Xilinx Inc., Processor Local Bus, 2011) a microprocesorului. DMA-
urile sunt capabile să deruleze transferuri utilizând protocolul DTL (Device Transaction Level)
(Philips Semiconductor Inc., 2002).

Sisteme de calcul dedicate cu circuite digitale reconfigurabile
48
Sistemul utilizează un contor de timp (engl. timer) care este folosit de un nucleu de sistem
de operare pentru planificarea proceselor denumit COMPOSE (Hansson, et al., 2011).
O unitate pentru controlul a frecvenţei și voltajului (engl. VFCU – Volatge Frequency
Control Unit) este utilizată pentru gestionarea puterii consumate de un modul microprocesor.
Aceasta este conectată la microprocesor utilizând o magistrală de comunicație de tip FSL (Xilinx
Inc., Fast Simplex Link, 2011) a microprocesorului Microblaze. Unitatea este responsabilă de
setarea frecvenţei de operare a microprocesorului şi de asemenea de validarea sau invalidarea
ceasului pentru o perioadă de timp specifică şi programabilă.
Modulul de monitorizare este un sistem care urmăreşte tranzacţiile pe magistrala de
comunicație PLB şi implementează structura de monitorizare. Detaliile implementării şi operării
sale sunt descrise în paragrafele următoare.
Toate modulele sistemului MPSoC sunt conectate prin rețeaua de interconectare Aethereal
NoC (engl. NoC – network on chip) (Goossens, Dielissen, & Radulescu, 2005). Această rețea este
proiectată pentru a furniza aplicaţiilor un nivel garantat de performanţă și servicii de comunicații.
Rețeaua are porturi DTL pentru tranzacţii de date şi de asemenea porturi EDI (engl. EDI – Event
Distribution Interconnect) (Vermeulen , Goossens , & Umrani , 2008) care sunt folosite pentru
difuzarea de evenimente la viteză ridicată între structurile de monitorizare.
Modulele cu microprocesoare şi rețeaua de interconectare sunt implementate în domenii de
ceas distincte. Fiecare zonă are propriul ei ceas şi de aceea sunt utilizate module pentru trecerea
semnalelor dintr-un domeniu de ceas în altul (Cummings, 2002).
4.4.1.2 Infrastructura de comunicație
Comunicația datelor între procesele alocate pe modulele microprocesor ale MPSoC este
implementată folosind protocolul C-HEAP (Nieuwland, et al., 2002) şi structuri de tip FIFO.
Detaliile infrastructurii de comunicație sunt prezentate în Figura 4.4.3.
Task
Producător
Task
Consumator
Microprocesor
DLMB
CMEM IN
CMEM OUT
RC
WC
INDICATOR CITIRE
INDICATOR SCRIERE
BUFER FIFO
STRUCTURĂ DE
DATE FIFO
DL
MB
DL
MB
PL
B
PL
B
DMAMON
DT
L
DT
L
Copie a RCWC
TOK Bufer
DT
L
Aethereal NoC
ED
I
TOK
MODULUL 1 EXECUTĂ
TASKUL PRODUCĂTOR
Alocarea resurselor hardware
Model de comunicație între taskuri
CMEM IN
CMEM OUT
Copie a WCRC
TOK
TOK
PLB
Microprocesor
DLMB
DL
MB
DL
MB
PL
B
PL
B
DMAMON
DT
L
DT
L
DT
L
ED
I
MODULUL 2 EXECUTĂ
TASKUL CONSUMATOR
PLB
Figura 4.4.3 Resursele alocate comunicațiilor dintre două module microprocesor al unui MPSoC
(Stan, Valachi, & Bârleanu, 2011)
Modelul de comunicație dintre procese este unul de tip producător-consumator care
utilizează o structură de date de tip FIFO cu un buffer circular pentru memorarea datelor şi două
indicatoare (i.e. pointeri) de date care indică poziţia de citire (RC) şi cea de scriere (WC) în buffer.

Sisteme de calcul dedicate cu circuite digitale reconfigurabile
49
Pentru două procese care sunt alocate pe două module microprocesor distincte, buffer-ul
circular este alocat în memoria locală a modulului microprocesor pe care se execută procesul
consumator. În acest fel, numai operaţiile de scriere transferă pachetele de date prin rețeaua de
interconectare NoC de la modulul consumator către modulul producător.
Informaţia de control FIFO este reprezentată de indicatorii de citire şi scriere din modulele
consumatorului şi ai producătorului. Acest lucru este realizat pentru a mări viteza execuţiei în caz că
sistemul de operare verifică starea unui buffer circular pentru a testa disponibilitatea datelor de
intrare pentru procese. Un proces este activat de către planificatorul sistemului de operare numai
dacă există suficiente pachete de date în buffer-ul de intrare pentru acel proces.
Infrastructura de monitorizare urmăreşte accesele memoriei care sunt emise către adrese
care corespund buffer-ului circular sau informaţiilor de control ale buffer-elor. În acest fel,
infrastructura de monitorizare se leagă în mod non-invaziv de sistemul monitorizat. Astfel,
infrastructura de comunicație furnizează datele principale de intrare în cadrul structurii de
monitorizare.
Într-o platformă MPSoC, infrastructura de comunicație este un punct potrivit de observaţie
pentru funcţionarea internă a sistemului pentru că operarea acestuia utilizează din plin infrastructura
de comunicație. Corectitudinea operării poate fi evaluată analizând parametrii de timp ai
comunicației dintre procesele din cadrul unui MPSoC.
4.4.2 Arhitectura structurii de monitorizare
Structura de monitorizare este implementată ca un dispozitiv periferic alocat (engl. mapped)
în spaţiul de adresare al modului microprocesor. Arhitectura de nivel înalt a structurii de
monitorizare este prezentată în Figura 4.4.4.
ED
I
Registre cu
parametri
programabili
Nucleu de
monitorizare
Registre de
control
Registre de
stare
PL
B
Interfața cu
microprocesorul
Figura 4.4.4 Arhitectura structurii de monitorizare (Stan, Valachi, & Bârleanu, 2011)
Structura de monitorizare implementează un mecanism de tip watchdog cu fereastră (engl.
window watchdog) care înregistrează numărul de evenimente apărute pe magistralele de
comunicație apărute înaintea unei limite de timp (TooEarly Counter), între două limite de timp
(Event Counter) sau după o limită de timp (TooLate Counter). Limitele intervalelor de timp utilizate
pentru urmărirea unui anumit eveniment al magistralei de comunicație sunt stocate în registre cu
parametri programabili şi setați de către aplicaţii la valori adecvate. Aceste valori sunt calculate la
timpul proiectării şi verificate prin experimente (Wilhelm, et al., 2008).
Comportamentul temporal corect şi preconizat al aplicaţiilor care rulează pe o platformă
MPSoC poate fi determinat experimental prin executarea şi caracterizarea aplicaţiei într-un mediu
sigur și fără interferențe.
Structura de monitorizare are două module. Modulul de interfață cu microprocesorul
implementează o interfaţă pentru un dispozitiv slave PLB şi conține registrele de control, date (i.e.
parametri) şi stare.
Registrele de control conţin câmpuri cu biţi care sunt utilizaţi pentru pornirea sau oprirea
operării structurii de monitorizare şi de asemenea pentru a porni sau opri cronometrarea
evenimentelor care sunt detectate prea devreme sau prea târziu. Aceste setări sunt efectuate de
aplicaţii conform necesităţilor lor şi oferă un mod flexibil de monitorizare a evenimentelor.

Sisteme de calcul dedicate cu circuite digitale reconfigurabile
50
Registrele de stare ai structurii de monitorizare sunt încărcaţi cu valorile contoarelor de
evenimente. Aceste registre pot fi citiţi de către aplicaţii sau de către sistemul de operare care pot
acţiona adecvat atunci când sunt detectate condiţii de operare anormale. Valorile acestor registre pot
declanșa excepţii care sunt tratate într-o manieră adecvată aplicaţiei.
Figura 4.4.5 prezintă detalii de implementare ale structurii de monitorizare. Modulul
Detector al magistralei PLB compară datele programate din registrele cu parametri programabili cu
valorile curente ale magistralei PLB. Daca este detectată o potrivire, este activat un semnal care este
intrare pentru nucleul de monitorizare FSM (engl. Finite State Machine). Acest modul este un
mecanism de tip watchdog cu fereastră care verifică dacă un semnal de intrare este activat între
două valori programate ale unui contor de timp. Cele două valori definesc un interval de timp.
Contorul din interiorul FSM-ului utilizează ca semnal de ceas, ceasul NoC-ului. Această sursă a
semnalului de ceas este utilizată de către toate structurile de monitorizare dintr-un MPSoC. Această
alegere asigură o sursă de timp consistentă pentru toate structurile de monitorizare.
Modul de monitorizare
(Automat finit pentru un
Watchdog cu fereastră)
Modul detector de
evenimente pe magistrala
PLB PLB_ABus
PLB_wrDBus
PLB_RNW
SL_AddrAck
Enable
PLB_PAValidREF_ABus
REF_wrDBus
Enable
EnableHi
EnableLo
Event Counter
Event
Nucleu de monitorizare
TooLate Counter
TooEarly Counter
LimLate
LimEarly
Event Counter
TooLate Counter
TooEarly Counter
ED
I
EDI
Signals
Detector local de evenimente
Monitorizare a evenimentelor din alte
module
D
E
C
Sta
re
D
E
C
Monitorizare a evenimentelor locale
Figura 4.4.5 Structura de monitorizare (Stan, Valachi, & Bârleanu, 2011)

Sisteme de calcul dedicate cu circuite digitale reconfigurabile
51
Graful de fluență pentru mecanismul window watchdog FSM este prezentat în Figura 4.4.6.
Două dintre intrări (Early şi Late) pentru FSM sunt generate de către două comparatoare ale valorii
curente a contorului cu cele ale limitelor programate din registrele parametrilor programabili. A
treia intrare (Event) este generată de modulul Event Detector şi reprezintă apariția evenimentului
monitorizat. FSM-ul are o ieşire (RST) utilizată pentru resetarea valorii contorului. FSM-ul conţine
o stare de resincronizare pentru reluarea monitorizării după evenimente apărute ulterior ferestrei
normale de apariție.
IDLE
RST
RUN
nRST
TooEarly
RST
TooLate
RST
OnTime
RST
ReSynch
RST
0 0 0
Enable
1 - -
0 - -
0 - 1
1 - -
0 - -
Event AND Early AND Late
Conditions
1 0 0 0 - -
1 - -
1 1 -
1 - -
0 - -
!Enable
Enable
!Enable
Figura 4.4.6 Graful de fluență pentru controlul structurii de monitorizare
(Stan, Valachi, & Bârleanu, 2011)
Evenimentele magistralei PLB detectate şi contorizate local de către un modul
microprocesor sunt de asemenea difuzate către celelalte module utilizând interfaţa EDI. Această
interfaţă este una cu latenţă joasă, comparativ cu cele DTL ale NoC-ului. Semnalele interfeţei EDI
nu sunt rutate conform politicii de rutare din cadrul NoC. Ele sunt implementate ca simple
conexiuni care trec prin router-ele interne NoC. Utilizarea inițială a interfeţei EDI este pentru
testare şi verificare post-silicon (Larsson, Vermeulen, & Goossens, 2010), (Goossens, Vermeulen,
& Nejad, 2009). Acum este propusă o altă utilizare a acestei interfeţe: este folosită pentru a
semnala evenimente între module în momentul execuției, permiţând astfel verificarea execuției
aplicaţiilor. Folosind această interfaţă de comunicație simplă, utilizarea acestei resurse crește până
la 100% de-a lungul ciclului de viaţă al unui produs: în fazele de proiectare, testare şi utilizare.
Având în vedere faptul că structura de monitorizare utilizează intensiv contoare, iar
evaluarea corectitudinii depinde de valorile contoarelor, este recomandată folosirea unei
implementări robuste a contoarelor, precum cea prezentată în (Papadomanolakis, Kakarountas,
Sklavos, & Goutis, 2002).
4.5 Arhitectură pentru transformarea dinamică a codului în module hardware
Implementarea unui sistem de calcul după un set de specificații – funcții pe care sistemul
trebuie să le îndeplinească, poate lua una dintre următoarele forme:
Alocarea statică a funcțiilor sistemului pe componente hardware și software. Odată
ce s-a făcut această alocare, sistemul capătă o anumită structură hardware fixă care
este utilizată fără modificări pe întreaga durată de viață a sistemului. Acesta este

Sisteme de calcul dedicate cu circuite digitale reconfigurabile
52
modul cel mai uzual de implementare, care nu implică utilizarea de componente
reconfigurabile (e.g. circuite FPGA).
Alocarea dinamică a funcțiilor sistemului pe componente hardware și software.
Acest mod de implementare este posibil prin utilizarea de componente
reconfigurabile (e.g. circuite FPGA): se implementează o mare parte a funcțiilor
sistemului în componente software executate de microprocesoare incluse în
circuitele FPGA (engl. soft-core processors), apoi se realizează o analiză a execuției
printr-un proces de evaluare a performanțelor (engl. profiling). Această abordare se
bazează pe detectarea nucleelor de calcul existente în software (e.g. nuclee repetitive
care realizează diverse sarcini de calcul precum procesări de semnale). Informaţiile
extrase după procesul de analiză dau posibilitatea implementării în hardware a unor
porțiuni de software care pot beneficia în acest fel de o scădere a timpului de
execuție (i.e. o accelerare a execuției). În acest fel, o parte a sarcinilor de calcul sunt
executate de către module hardware dedicate, fără utilizarea microprocesorului
(Singh, 2011).
4.5.1 Arhitectura sistemului reconfigurabil
Etapele funcționării unui sistem reconfigurabil capabil de transformarea dinamică a unor
porțiuni de software în module hardware (Popa & Stan, 2010) sunt ilustrate în Figura 4.5.1.
SINTEZA HARDWARE
&COMPILARE SOFTWARE
EXECUȚIE SISTEMIMPLEMENTARE SOFTWARE
COLECTARE INFORMAȚIIDESPRE EXECUȚIE
GENERARE MODUL HARDWARE
SINTEZA MODUL HARDWARE&
INSTRUMENTARE COD
RECONFIGURARE SISTEM
EXECUȚIE SISTEMIMPLEMENTARE SOFTWARE &
HARDWARE
Figura 4.5.1 Funcționarea unui sistem reconfigurabil, după (Popa & Stan, 2010)
Pe baza informațiilor extrase prin monitorizarea execuției este generat un modul hardware
(sau mai multe) a cărui funcționalitate este identică cu blocul de instrucțiuni pe care îl va înlocui
ulterior în funcționarea sistemului. Modulul hardware generat este sintetizat în elementele
structurale specifice circuitului FPGA folosit (e.g. LUT – look up tables, multiplexoare, bistabile) și
apoi implementat (i.e. execuția proceselor de plasare și rutare - place an route). Simultan cu acest
proces este necesară și instrumentarea codului aplicațiilor care sunt executate de sistem pentru a

Sisteme de calcul dedicate cu circuite digitale reconfigurabile
53
folosi noul modul hardware. Porțiunile aplicațiilor (i.e. blocurile elementare) care au fost folosite
pentru a genera modulul hardware sunt înlocuite în codul aplicațiilor cu secvențe de cod care
realizează interfațarea cu modulul hardware prin care se realizează transferul datelor de intrare,
respectiv ieșire dintre microprocesor și modulul hardware.
Sistemul este reconfigurat cu noua structură care conține modulul hardware precum și
aplicațiile software instrumentate (i.e. modificate). Din acest moment, execuția aplicațiilor
utilizează atât vechea infrastructură (i.e. cea clasică) cu microprocesor cât și noul modul hardware.
În Figura 4.5.2 este prezentată structura propusă pentru un sistem reconfigurabil care este
alcătuit din două module:
Sistem cu microprocesor: este un modul cu structură clasică pentru un sistem de
calcul și care este proiectat pentru execuția de aplicații software. Este alcătuit dintr-un
microprocesor împreună cu memoria necesară stocării datelor și codului aplicațiilor.
Aplicațiile software executate de acest modul sunt monitorizate de sistemul de
reconfigurare pentru a detecta și extrage acele porțiuni care pot fi implementate în
module hardware.
Sistem de reconfigurare: este un modul care monitorizează execuția aplicațiilor de
către microprocesor și sintetizează un modul hardware (sau mai multe) cu
funcționalitate identică, cu porțiuni cu structură de execuție secvențială (i.e. fără
ramificații) ale aplicațiilor executate. Structurile decizionale, care sunt frecvente în
aplicații (e.g. instrucțiuni de salt sau apel de funcție), pot implementa structuri de
control foarte diverse și complexe a căror decodare este dificilă și necesită resurse
însemnate pentru o implementare a unui algoritm pentru un sistem reconfigurabil.
Pentru unele cazuri particulare și simple se poate realiza o decodare eficientă.
MICROPROCESOR(PICOBLAZE)
MEMORIE DE COD MEMORIE DE DATE
MODUL HARDWARE GENERAT
MODULPROFILER
MODULCONFIGURATOR
MAGISTRALA DATE/INSTRUCȚIUNI
MAGISTRALA ADRESE
SISTEM CU MICROPROCESOR
SISTEM DE RECONFIGURARE
Figura 4.5.2 Structura propusă a sistemului reconfigurabil, după (Popa & Stan, 2010)
Sistemul de reconfigurare este alcătuit din cele trei module prezentate în Figura 4.5.2.
Modulul PROFILER este conectat la magistralele sistemului și monitorizează execuția aplicațiilor
pentru a extrage informații despre execuție. Modulul PROFILER este cuplat la sistemul monitorizat
(i.e. la magistralele microprocesorului) deoarece trebuie să funcționeze la aceeași frecvență cu
acesta pentru a putea observa și înregistra evenimentele declanșate de microprocesor. Informațiile
extrase sunt comunicate către modulul CONFIGURATOR care generează un modul hardware a
cărui funcționare este determinată de informațiile primite de la modulul PROFILER. De asemenea,
modulul CONFIGURATOR realizează și reconfigurarea sistemului prin includerea modulului
hardware nou generat în sistem. Acest modul poate fi plasat în alt domeniu de ceas decât sistemul
monitorizat.
Modulul hardware generat este interfațat cu sistemul cu microprocesor prin conectarea la
magistralele acestuia și de asemenea la memoria de date. Conectarea la magistralele
microprocesorului este necesară pentru a putea sincroniza funcționarea modulului hardware cu

Sisteme de calcul dedicate cu circuite digitale reconfigurabile
54
funcționarea microprocesorului. Modulul hardware fiind un modul periferic, este necesar ca
microprocesorul să controleze prin operații de scriere de cuvinte de comandă activitatea modulului
hardware. Transferul datelor de intrare către periferic precum și preluarea rezultatelor se poate
efectua de către microprocesor prin scrierea și citirea de cuvinte de date la și de la periferic.
Conectarea la memoria de date este necesară modulului hardware pentru a putea citi sau scrie direct
date în memorie.
Sistemul prezentat în Figura 4.5.2 poate fi implementat în întregime pe un circuit
reconfigurabil de tip FPGA. Deoarece funcționarea acestui sistem presupune reconfigurarea
dinamică a unei porțiuni din circuit este necesar ca circuitul FPGA folosit să ofere posibilitatea de
reconfigurare dinamică parțială (engl. dynamic partial reconfiguration). Această caracteristică nu
este implementată în toate circuitele FPGA ci doar în familiile mai avansate (e.g. Virtex5, Virtex6,
Virtex7 de la Xilinx). În cazul utilizării unui circuit FPGA pentru care este absentă această
caracteristică este necesară reconfigurarea integrală a circuitului. În acest caz, care a fost și cel
utilizat în efectuarea de experimente cu arhitectura propusă, unele module ale arhitecturii au fost
alocate pe alte sisteme de calcul așa cum este prezentat în Figura 4.5.3.
Pentru experimentele realizate, modulul CONFIGURATOR este implementat în întregime pe
un calculator sub forma unei aplicații. În acest fel, se pot folosi programe puternice (e.g.
generatoare de cod, programe de sinteză logică) pentru generarea de module hardware din
informațiile extrase de modulul PROFILER.
Transferul informațiilor dintre cele două sisteme (i.e. PC și platforma reconfigurabilă) este
realizat prin două interfețe de comunicație. Interfața UART este folosită pentru transferul
informațiilor colectate de modulul PROFILER către aplicația de pe calculator. Interfața USB este
utilizată pentru reconfigurarea circuitului FPGA cu noua configurație care include și noul modul
hardware generat.
MICROPROCESOR(PICOBLAZE)
MEMORIE DE COD MEMORIE DE DATE
MODUL HARDWARE GENERAT
MODULPROFILER
MODULCONFIGURATOR
MAGISTRALA DATE/INSTRUCȚIUNI
MAGISTRALA ADRESE
PC
DISPOZITIV RECONFIGURABIL
UART
USB
Figura 4.5.3 Alocarea modulelor sistemului reconfigurabil, după (Popa & Stan, 2010)
4.5.2 Algoritmii de funcționare pentru sistemul reconfigurabil
Funcționarea sistemului reconfigurabil presupune proiectarea și implementarea algoritmilor
care să realizeze: monitorizarea execuției codului de către microprocesorul din sistem, extragerea și
stocarea informațiilor din fluxul de execuție necesare construirii modulelor hardware cu
funcționalitate identică, sintetizarea pe baza acestor informații a modulelor hardware și actualizarea
structurii sistemului cu noile module hardware sintetizate.
Modulul PROFILER implementează următoarele funcții:
monitorizarea execuției codului prin conectarea la magistralele de adrese și
instrucțiuni ale microprocesorului;
memorarea într-o memorie locală a secvențelor de instrucțiuni executate de
microprocesor;

Sisteme de calcul dedicate cu circuite digitale reconfigurabile
55
comunicarea către modulul CONFIGURATOR a informațiilor memorate anterior.
Modulul CONFIGURATOR implementează următoarele funcții:
preluarea de la modulul PROFILER a informațiilor care descriu o secvență de
instrucțiuni executată de microprocesor;
generarea de module hardware care au funcționalitate identică cu secvența de
instrucțiuni primită de la modulul PROFILER;
sintetizarea modulelor hardware anterior generate pentru tehnologia folosită (i.e.
FPGA);
reconfigurarea sistemului cu noua structură care include și modulele hardware
generate.
Modulul PROFILER realizează decodificarea instrucțiunilor aritmetice, logice și de transfer
care sunt transferate pe magistrala de instrucțiuni a microprocesorului. Pentru fiecare astfel de
instrucțiune este construită o înregistrare care este memorată într-o memorie locală modulului
PROFILER (denumită execution memory – EM). Pentru fiecare înregistrare sunt memorate
următoarele informații:
adresa instrucțiunii sau o parte a biților mai puțin semnificativ ai adresei
instrucțiunii;
tipul instrucțiunii (e.g. ADD, SUB, etc.);
informații care descriu operanzii sursă și/sau destinație;
adresa ultimei instrucțiuni sau o parte a biților mai puțin semnificativi ai adresei
instrucțiunii care a modificat operandul sursă;
tipul instrucțiunii (e.g. ADD, SUB, etc.) care a modificat operandul sursă;
adresa ultimei instrucțiuni sau o parte a biților mai puțin semnificativi ai adresei
instrucțiunii care a modificat bitul CARRY.
Pentru memorarea tipului și adreselor instrucțiunilor care modifică valorile registrelor (e.g.
execută operații de scriere în registre) este utilizat un alt modul de memorie locală cu un număr de
locații egal cu numărul registrelor microprocesorului (denumit register memory -RM).
Modulul PROFILER are două moduri de funcționare:
modul de monitorizare și memorare a secvenței de execuție;
modul de comunicare a informațiilor memorate către modulul CONFIGURATOR.
Tranziția între cele două moduri de funcționare se face după ce a fost adunată o anumită
cantitate de informație despre execuția sistemului.
Algoritmul de funcționare pentru modulul PROFILER în modul de monitorizare și
memorare este prezentat în Figura 4.5.4.
foreach fetch cycle
instr_crt = instruction_bus
addr_crt = address_bus
if instr_crt is arith_logic or register transfer then
if instr_crt writes to a register then
RM[ DEST_REG_FIELD ] = addr_crt
endif
if instr_crt reads a regsiter then
source_reg = instr_crt[ SOURCE_REG_FIELD ]
addr_last = RM[ source_reg ]
instr_last = RM[ source_reg ]
append addr_crt, instr_crt, addr_last, instr_last
else // instr_crt operates with a constant
konst = instr_crt[ CONST_FIELD ]
append addr_crt, instr_crt, konst
endif
endif
endfor
Figura 4.5.4 Algoritmul modulului PROFILER

Sisteme de calcul dedicate cu circuite digitale reconfigurabile
56
Modulul CONFIGURATOR primește de la modulul PROFILER informația stocată de
acesta în EM și generează modulul hardware în limbaj de descriere hardware Verilog HDL, prin
instanțierea repetată de module hardware corespunzătoare fiecărei instrucțiuni din EM și conectarea
acestor module conform informațiilor din EM.
Algoritmul după care funcționează acest modul este prezentat în Figura 4.5.5.
foreach record from EM
define connection wires
select HW module according to record
instantiate and connect the HW module
endfor
Figura 4.5.5 Algoritmul modulului CONFIGURATOR
După generarea modulului hardware se execută procesul de sinteză a modulului generat
împreună cu celelalte elemente ale sistemului. Noul modul care implementează aceeași
funcționalitate ca și o porțiune de program este conectat ca un periferic la microprocesorul din
sistem. În locul execuției secvenței de program care este înlocuită de modulul hardware,
microprocesorul execută o secvență de instrucțiuni prin care:
sunt transmise datele de intrare către modulul periferic;
este sincronizată execuția cu momentul terminării efectuării operațiilor de către
modulul periferic;
sunt citite rezultatele de la modulul periferic.
Implementarea modului de interfațare dintre microprocesor și modulul hardware face
obiectul direcțiilor viitoare de cercetare. O variantă de implementare avută în vedere este
instrumentarea codului binar al aplicației executate de către microprocesor astfel încât să suporte
noul periferic inclus în sistem și utilizarea lui atunci când este cazul conform fluxului de execuție
(Lysecky , Stitt, & Vahid, 2006).
De asemenea, codul generat în urma transformării expresiilor, prezentat în Capitolul 3.3,
poate beneficia de sporirea performanțelor (e.g. creșterea vitezei de execuție) dacă este implementat
în hardware folosind metoda prezentată în acest capitol. Acest lucru este posibil deoarece codul
generat are o structură liniară fără ramificații (i.e. este un bloc elementar).
4.6 Concluzii
În acest capitol a fost prezentată proiectarea de sisteme de calcul dedicate cu circuite
reconfigurabile de tip FPGA. Flexibilitatea structurii acestor circuite prezintă multiple oportunități
de proiectare și implementare pentru sisteme de calcul dedicate.
S-au prezentat două arhitecturi pentru monitorizarea corectitudinii execuției aplicațiilor de
către microprocesoarele softcore incluse în circuitele FPGA. Arhitecturile prezentate folosesc un
model de redundanță spațială prin implementarea unor mecanisme de tip watchdog care
monitorizează apariția unui anumit tip de evenimente în sistem. Pentru evenimentele monitorizate
sunt comparați parametrii de timp ai declanșării evenimentelor la execuție cu parametrii de timp
calculați în etapa de proiectare. Nepotrivirile dintre valorile parametrilor conduc la declanșarea unui
mecanism de tratare potrivit aplicației (e.g. reset micropocesor).
S-a prezentat o arhitectură pentru un sistem reconfigurabil capabil să transforme în mod
dinamic funcționalitatea implementată prin execuția unor secvențe de cod în module hardware cu
funcționalitate identică. Arhitectura folosește module hardware suplimentare care evaluează codul
executat, extrag caracteristicile codului și generează module hardware care au aceeași

Sisteme de calcul dedicate cu circuite digitale reconfigurabile
57
funcționalitate cu a codului evaluat. Modulele hardware generate sunt sintetizate și apoi incluse în
sistem (e.g. prin reconfigurare parțială).
Folosirea arhitecturilor prezentate în proiectarea de sisteme dedicate are consecințe în
creșterea siguranței în funcționare a aplicațiilor sau a performanțelor de calcul.


59
5 Structură autotestabilă pentru memoriile RAM
5.1 Defecte de memorie
Dezvoltarea rapidă a tehnologiei circuitelor integrate a condus la o creştere continuă a
capacităţii circuitelor de memorie. Odată cu creşterea densităţii de integrare şi rata defectelor de
fabricaţie este mai mare. În plus, sunt tot mai frecvente defectele complicate, greu de modelat şi de
detectat. Cu densităţi în creştere, anumite tipuri de defecte, precum defectele de cuplaj între trei
celule de memorie, care sunt mai greu de detectat, devin din ce în ce mai importante. În plus, este
necesar mai mult timp pentru testarea memoriilor datorită dimensiunilor lor crescânde, astfel este
necesară identificarea testelor mai eficiente, care au capacitatea de a detecta defecte complexe, teste
care necesită timp de testare de ordinul n. Calitatea testelor utilizate, în termeni de acoperire a
defectelor şi lungimea testului, este puternic dependentă de modelele de defecte utilizate.
5.2 Notaţii folosite în descrierea testelor de memorie
În testarea circuitelor de memorie nu se operează cu defecte fizice propriu-zise în număr
foarte mare, ci cu modele de defecte care reflectă modul lor de manifestare (i.e. care descriu modul
în care acestea afectează funcţionarea circuitului).
Numeroase modele de defecte funcţionale (engl. FFM – Fault Functional Model) pentru
memorii au fost introduse în trecut; unele FFM-uri foarte cunoscute care datează de dinainte de
1999 sunt: defectul de tip blocaj (engl. stuck-at), defect de decodor, defect de păstrare a datelor,
defect de tip read stuck open, defect destructiv la citire, defect de tip deceptive read destructive şi
defect de cuplaj (Van de Goor A. J., 1998). În 1999, rezultatele experimentale obținute prin
aplicarea unui număr mare de teste la un număr mare de cipuri (Van de Goor & De Neef, 1999) au
indicat că multe teste funcţionale detectează într-adevăr defecte în memorii, dar care nu pot fi
explicate folosind setul binecunoscut de FFM-uri. Acest lucru a condus la introducerea de noi FFM-
uri, pe baza injectării defectelor şi simulării circuitelor (Van de Goor & Al-Ars, 2000): defect de tip
write disturb, defect de citire incorectă, defect la cuplare de tranziţie, defect de cuplare de tipul read
destructive etc.
O secvenţă de operaţii care conduce la observarea unei diferenţe între valoarea observată şi
cea aşteptată a unei celule de memorie se numeşte secvenţă de activare (engl. sensitizing operation
sequence – S). Comportamentul observat al celulei de memorie care se abate de la funcţionarea
corectă se numeşte comportament eronat (engl. faulty behavior – F). Pentru a specifica o anumită
eroare, trebuie precizate condiţia de activare a erorii şi modul de manifestare al acesteia (i.e.
comportamentul în cazul existenţei erorii), iar dacă operaţia este una de citire se prezintă şi
rezultatul acestei operaţii (R). Ansamblul S, F, R pentru o anumită eroare se numeşte defect primitiv
(engl. Fault Primitive – FP) şi este notat astfel: <S|F|R|>. Conceptul de defect primitiv permite

Structură autotestabilă pentru memoriile RAM
60
construirea unui cadru de studiu pentru toate erorile (Caşcaval & Bennett, 2001), (Caşcaval,
Bennett, & Huţanu, 2004).
Dacă se notează cu #O numărul de operaţii diferite care apar în S, atunci FP se pot împărţi
în:
erori statice, pentru #O ≤1;
erori dinamice, pentru #O≥2.
Exemple de erori statice sunt cele de tip blocaj la 1 sau la 0 (#O = 0) sau atunci când o
operaţie de citire cauzează complementarea valorii unei celule de memorie (#O = 1). Un exemplu
de eroare dinamică este atunci când două operaţii de citire succesive determină complementarea
valorii unei celule de memorie (#O = 2); însă o singură citire nu va determina acest comportament.
Următoarele notaţii sunt uzual folosite pentru a descrie operaţii asupra memoriilor RAM:
r semnifică o operaţie de citire, iar valoarea aşteptată în urma citirii nu este
specificată;
r(0) sau r(1) semnifică citirea unui 0 sau a unui 1 dintr-o celulă de memorie;
0w0 sau 1w1 semnifică o operaţie de scriere a valorii unei celule care conţine 0 sau 1
fără a modifica valoarea memorată în celulă;
0w1 sau 1w0 (sau pe scurt wc) semnifică o operaţie de scriere a valorii unei celule
care conţine 0 sau 1 cu modificarea valorii memorate în celulă;
↑ sau ↓ semnifică o tranziţie a valorii memorate datorită unei anumite condiţii de
activare.
În concluzie, un defect primitiv este exprimat prin <S|F|R>, unde:
S descrie valoarea sau operaţia de activare a defectului; S{0, 1, r0, r1, 0w0, 1w1,
0w1, 1w0};
F descrie valoarea celulei de memorie afectată de eroare (i.e. celulă victimă);
F{0, 1 , ↑, ↓};
R descrie valoarea care apare la ieşirea memoriei în cazul în care operaţia de activare
este o citire; R{ 1, 0, -}. Simbolul - semnifică faptul că nu se poate preciza o
valoare pentru R deoarece operaţia nu este una de citire. De exemplu, dacă S = 0w0
atunci la ieşirea memoriei nu va fi disponibilă nici o informaţie, caz în care R va
avea valoarea -.
După modul în care se manifestă FP, acestea pot fi clasificate în:
Erori simple (engl. simple faults). Acestea sunt erori care nu pot fi influenţate de alte
erori. Acest lucru înseamnă că comportamentul unei erori nu poate modifica
comportamentul alteia; deci nu poate apare fenomenul de mascare al erorilor.
Erori conectate (engl. linked faults). Acestea sunt erori care se pot influenţa
reciproc, astfel încât poate apare fenomenul de mascare. De menţionat este faptul că
aceste erori au la bază două sau mai multe erori simple.
Erorile memoriilor RAM se pot clasifica în erori la nivelul unei singure celule (engl. single-
cell faults) sau erori care implică mai multe celule (engl. multi-cell faults). Pentru erorile care
implică mai multe celule studiul este limitat la erorile de cuplaj între două celule. Această clasă
reprezintă o clasă importantă de erori.
Un defect primitiv pentru două celule este reprezentat astfel: <S|F|R> = <Sa;Sv|F|R>, în care
Sa şi Sv sunt operaţiile de activare executate asupra celulelor de memorie agresor şi victimă. Celula
agresor este aceea asupra căreia trebuie executată operaţia de activare a erorii, iar celula victimă
este aceea care prezintă comportamentul eronat.

Structură autotestabilă pentru memoriile RAM
61
5.3 Testul de memorie MarchS2C
Testele March sunt teste din clasa de complexitate O(n). Odată cu creşterea capacităţii de
memorie testelor March li s-a acordat o atenţie deosebită, fiind singurele care pot asigura o testare
eficientă într-un timp scurt. În prezent sunt testele cele mai folosite în practică.
Se prezintă în continuare algoritmul MarchS2C (Cașcaval & Stan, 2007) împreună cu
notaţiile aferente. În mod uzual, un test MARCH este delimitat printr-o pereche de acolade `{...}` în
timp ce un element March este delimitat de o pereche de paranteze rotunde `(...)`. Elementele
March sunt separate prin punct şi virgulă, iar operaţiile dintr-un element sunt separate prin virgulă.
Toate operaţiile dintr-un element March sunt efectuate succesiv asupra unei adrese înainte de a se
trece la adresa următoare. Întreaga memorie este verificată în mod omogen în una din cele două
ordini de parcurgere a adreselor: în ordine ascendentă a adresei (⇑) sau în ordine descendentă a
adresei (⇓). Când ordinea de parcurgere nu este relevantă se utilizează simbolul ⇕.
Testul de memorie MarchS2C este prezentat în Figura 5.3.1. Acest test March are o lungime
de 22n şi este capabil să descopere toate erorile din modelul pentru două celule cuplate. Testul este
alcătuit din şase elemente March, identificate prin indecşii marcaţi cu (x), unde x{0,1,2,3,4,5}. Un
test similar este propus în (Hamdioui, van de Goor, & Rodgers, 2002)
{
⇕ (w0) (0);
⇑ (r0,w1,r1,r1,w1) (1) ; ⇑ (r1,w0,r0,r0,w0) (2) ;
⇓ (r0,w1,r1,r1,w1) (3) ; ⇓ (r1,w0,r0,r0,w0) (4) ;
⇕ (r0) (5) ;
}
Figura 5.3.1 Testul de memorie MarchS2C (Cașcaval & Stan, 2007)
MarchS2C este capabil să detecteze toate FFM-urile cu 2 celule. Tabelul 5.3.1 indică prin
care element March este detectat fiecare FP. În acest tabel, au fost puse în evidență două cazuri:
celula v are o adresă mai mare decât celula a (i.e. v > a);
celula v are o adresă mai mică decât celula a (i.e. v < a ).
Perechea i, j denotă operația j a elementului March Mi; (e.g. 1, 1 denotă prima operație – r0
– a M1). Mai mult decât atât, pentru modelul de defecte de cuplaj dintre două celule, testul
MarchS2C este un test optim.
Testul de memorie MarchS2C este unul minimal relativ la operațiile de citire și scriere cu
memoria. Se arată în continuare că testul de memorie realizează un număr minimal de operaţiuni de
scriere. Tabelul 5.3.1 Acoperirea defectelor de către testul de memorie MarchS2C (Cașcaval & Stan, 2007)
# FFM a<v v<a
1 <0;0/1/-> 1,1 1,1
2 <0;1/0/-> 2,1 1,3
3 <1;0/1/-> 1,1 2,3
4 <1;1/0/-> 1,3 2,1
5 <0w0;0/↑/-> 1,1 3,1
6 <0w1;0/↑/-> 2,1 2,1
7 <1w1;0/↑/-> 2,3 1,1
8 <1w0;0/↑/-> 1,1 2,3
9 <0w0;1/↓/-> 2,4 4,4
10 <0w1;1/↓/-> 4,4 2,4
11 <1w1;1/↓/-> 2,3 1,1
12 <1w0;1/↓/-> 1,1 2,3

Structură autotestabilă pentru memoriile RAM
62
13 <r0;0/↑/-> 1,1 3,1
14 <r1;0/↑/-> 2,1 2,1
15 <r0;1/↓/-> 2,1 1,3
16 <r1;1/↓/-> 1,3 2,1
17 <0;0w1/0/-> 3,4 1,4
18 <1;0w1/0/-> 1,4 3,4
19 <0;1w0/1/-> 2,1 1,3
20 <1;1w0/1/-> 1,3 2,1
21 <0;0w0/↑/-> 5,1 3,1
22 <1;0w0/↑/-> 2,1 4,1
23 <0;1w1/↓/-> 3,1 5,1
24 <1;1w1/↓/-> 5,1 3,1
25 <0;r0/↑/1> 1,1 3,1
26 <1;r0/↑/1> 4,1 2,1
27 <0;r1/↓/0> 4,1 2,1
28 <1;r1/↓/0> 2,1 4,1
29 <0;r0/↑/0> 1,1 3,1
30 <1;r0/↑/0> 4,1 2,1
31 <0;r1/↓/1> 3,3 1,3
32 <1;r1/↓/1> 1,3 3,3
33 <0;r0/0/1> 5,1 3,1
34 <1;r0/0/1> 2,1 4,1
35 <0;r1/1/0> 2,3 4,3
36 <1;r1/1/0> 4,3 2,3
Figura 5.3.2 prezintă o diagramă de stare cu toate operaţiunile de scriere posibile pentru
două celule, ci şi cj, în care cj are o adresă superioară lui ci (i.e. ci < cj).
Figura 5.3.2 Diagrama stărilor pentru două celule de memorie ci și cj ( ci < cj ) și
toate operațiile de scriere efectuate de testul de memorie MarchS2C (Cașcaval & Stan, 2007)
Figura arată prin care element March se realizează fiecare operație de scriere, perechea i, j
denotă operația j de scriere a elementului March Mi. Se observă că orice operaţie de scriere
efectuată de către MarchS2C este reflectată în diagrama de stare. Pe de altă parte, fiecare arc din
acest grafic este străbătut o singură dată şi numai dată. Cu alte cuvinte, MarchS2C acoperă graficul
Eulerian în întregime cu un număr minim de operaţiuni de scriere. În mod analog, se poate dovedi
că MarchS2C realizează un număr minim de operaţiuni de citire pentru a activa defecte precum
CFds, CFrd, CFdrd sau Cfir şi pentru a detecta orice defect activat.

Structură autotestabilă pentru memoriile RAM
63
Abilitatea testului MarchS2C de a detecta orice defect de cuplare cu 2 celule a fost de
asemenea verificată în simulare.
5.4 Comparație cu alți algoritmi de testare March
Pentru a compara performanțele algoritmului MarchS2C s-au considerat algoritmii de testare
March prezentați în următorul tabel.
Tabelul 5.4.1 Gradul de acoperire al erorilor de tip cuplaj între două celule (Cașcaval & Stan, 2007)
# Test memorie Lungime test Acoperire defecte
(%)
1 Algoritm A 30n 72,22
2 March G 24n 69,44
3 MarchS2C 22n 100
4 March LA 22n 77,78
5 March B 17n 57,14
6 March LR 14n 66,67
7 March SR 14n 72,22
8 March U 13n 66,67
9 PMOVI 13n 73,61
10 March C 10n 66,67
5.5 Structuri autotestabile
BIST (engl. Built In Self Test) este o tehnică de proiectare a circuitelor digitale orientată spre
testabilitate, prin care logica de testare este plasată pe circuit alături de blocurile testate. Schema
bloc pentru un astfel de sistem este prezentată în Figura 5.5.1. În modul normal de operare, circuitul
testat, preia intrările de la alte module şi realizează funcţia pentru care a fost proiectat. În modul de
testare, un generator de secvenţe de test aplică o serie de secvenţe de test la intrările sistemului
testat, iar un bloc de verificare evaluează răspunsul dat de circuit la o secvenţă de test.
MUX
Generator vectori de test
Modul de control
Monitorpentru ieșire
Circuit testat(CUT)
Intrare
Ieșire
Eroare
Modul autotestare
Secvență de test
Figura 5.5.1 Schema generală a unei arhitecturi de tip BIST (Cașcaval, Silion, & Stan, 2007)
Asigurarea unei acoperiri suficient de mari a erorilor şi a unui număr suficient de mic de
vectori de test sunt cele două mari probleme ale implementării unui modul BIST.
În cele ce urmează, se foloseşte modelul de erori statice de tip cuplaj între două celule de
memorie. Acesta este cel mai cuprinzător model pentru erori de tip cuplaj între două celule de

Structură autotestabilă pentru memoriile RAM
64
memorie. De asemenea este prezentată şi implementarea unui modul BIST pentru testarea acestor
erori.
5.6 Proiectarea logicii de testare
Pentru testul de memorie MarchS2C, o schemă bloc a modulului BIST (Cașcaval, Silion, &
Stan, 2007) este prezentată în Figura 5.6.1. Modulul BIST are trei elemente componente: logica de
generare a adresei, logica de generare a datelor şi de verificare, şi logica de control
microprogramată.
MUX
Buffer date
Comparator date
Contor Element March (MEC)
NumărătorAscend./Descend.
Modul de control
1
0
R/W RES UP MEC
ME
Modul de memorie
Result F/F
State F/F
InitZeroInitOne
UP/DNEOS
(End of Seq)
Semnale comandă( Data, RES, …)
DataError
Semnale de stare( EOS, Error, ME )
Start Test Result
End of Test
Test Result
End of Test
0 – fără eroare1 – eroare
0 – test în derulare1 – test încheiat
Generator de adresă
Generator de date &Verificare răspuns
Figura 5.6.1 Schema bloc a modulului BIST (Cașcaval, Silion, & Stan, 2007)
5.6.1 Logica de generare a adresei
Acest bloc este alcătuit dintr-un numărător cu posibilitate de numărare în ambele sensuri
crescător şi descrescător. Numărătorul de adrese poate fi inițializat cu 0 (InitZero) sau 1 (InitOne) în
toţi biţii. Memoria este testată atât în ordine ascendentă cât şi în ordine descendentă a adreselor
astfel încât, funcţie de elementul March (ME) curent, logica de control va incrementa sau va
decrementa numărătorul de adrese.
5.6.2 Logica de generare a datelor şi de verificare
Logica de generare produce datele care urmează a fi înscrise în memorie precum şi datele
aşteptate (i.e. de referinţă) pentru verificarea răspunsului memoriei. O logică unică pentru generarea
ambelor tipuri de date, cele pentru scriere şi cele pentru verificare, poate fi utilizată. Se observă că,
exceptând primul şi ultimul element March – prima iniţializare şi ultima citire, algoritmul de testare
efectuează operaţii similare notate (r,wc,r,r,w). Fiecare element March începe printr-o operaţie de
citire urmată de o operaţie de scriere (r,wc). Data folosită la operaţia de scriere este complementul
datei aşteptată a fi citită din celula de memorie. Următoarele operaţii de citire şi scriere (r,r,w)
folosesc aceleaşi valori ale datelor care au fost scrise anterior în memorie de către prima operaţie de
scriere a unui element March (wc). Generatorul de date este alcătuit dintr-un multiplexor şi
numărător pentru elementele March (engl. MEC – March element counter). Multiplexorul este
selectat în concordanţă cu valoarea datei aşteptate prezentate în Tabelul 5.6.1. Variabila Data este
utilizată pentru a comanda multiplexorul astfel încât să genereze data potrivită.

Structură autotestabilă pentru memoriile RAM
65
Tabelul 5.6.1 Data aşteptată la prima citire a unei celule pentru fiecare element March
(Cașcaval, Silion, & Stan, 2007)
Element March (0) (1) (2) (3) (4) (5)
Data așteptată 0 0 1 0 1 0
5.6.3 Logica de control microprogramată
Logica de control are rolul de a controla întreg procesul de testare. Schema unui bloc de
control microprogramat generic este prezentată în Figura 5.6.2. Adresa pentru memoria de
microprogram este generată de un registru numărător a cărui intrări de comandă pentru funcțiile de
numărare și încărcare sunt generate de o logică combinațională. Semnalele de intrare în acest circuit
combinațional sunt reprezentate de semnalele de condiție din sistem (e.g. EOS, ME, Error, Start) și
de semnale care provin de la două câmpuri ale registrului de microprogram: up/load și branch
condition.
MUX
0 Start EOS ME Error
Memoriemicrocod
UP/LD ADRESĂ COND SENMALE COMANDĂ
Numărător
UP LD
ADRESĂ
uIN
STR
UC
ȚIU
NE
R/W DataTest
Result...
Figura 5.6.2 Logica de control microprogramată (Cașcaval, Silion, & Stan, 2007)
Organigrama algoritmului de testare este prezentat în Figura 5.6.3, unde s-au notat cu
O(w0), O(rwcrrw) şi O(r) operaţii specifice efectuate asupra celulei de memorie curente de
elementele March (w0), (r,wc,r,r,w) şi (r).
Start
O(w0)
address = 0, ME = 0,State F/F = 1
address++
EOS
address=0, ME++
O(rwcrrw)
address++
EOS
ME<=2
Error
address=1, ME++
O(rwcrrw)
address--
EOS
ME<=4
Error
address=0, ME++
O(r)
address++
Error
EOS
Result F/F = 0,State F/F = 0
Result F/F = 1,State F/F = 0
A
AW
E
E
E
E
W
P
P
W
Figura 5.6.3 Organigrama de funcționare pentru unitatea de control a structurii BIST
care implementează algoritmul de testare MarchS2C (Cașcaval, Silion, & Stan, 2007)

Structură autotestabilă pentru memoriile RAM
66
În privinţa arhitecturilor MASB, o metodă de verificare este compararea ieşirilor biţilor
plasaţi simetric în matricele de memorie. Pentru aceste arhitecturi nu mai este necesară generarea
separată a răspunsului aşteptat în acest caz.
5.7 Concluzii
În acest capitol s-a prezentat problematica testării circuitelor de memorie RAM. S-a propus
un nou algoritm MARCH de testare a memoriilor RAM pentru defectele de tip cuplaj între două
celule de memorie. Testul propus este minimal relativ la operațiile de citire și scriere efectuate și
detectează toate defectele primitive considerate. Comparația cu alți algoritmi a arătat că algoritmul
propus este singurul care are un grad de acoperire al defectelor de 100%.

67
6 Concluzii
În această teză au fost abordate multiple aspecte din domeniul proiectării sistemelor de
calcul dedicate. Provocările la care trebuie să răspundă sistemele de calcul dedicate sunt generate de
mai multe surse: societatea umană contemporană (e.g. nevoi de asistență medicală personalizată),
caracteristicile aplicațiilor actuale (e.g. interacțiune dintre utilizator și sistemele de calcul, siguranța
utilizatorilor), constrângeri de natură economică și constrângeri tehnologice (e.g. puterea
consumată).
Sistemele de calcul dedicate reprezintă categoria de sisteme de calcul cu creșterea cea mai
rapidă și cu diversitatea de implementări cea mai mare. De asemenea, sistemele de calcul dedicate
au cea mai largă plajă pentru costuri relativ la puterea de calcul disponibilă. Acestea sunt proiectate
și construite pentru a îndeplini doar o anumită funcție sau un set restrâns de funcții înrudite oferind
astfel o oportunitate pentru optimizarea implementării lor. Aceste sisteme de calcul sunt incluse în
sisteme tehnice mai complexe și implementează cel mai adesea funcții de control, comunicație,
procesare de date, stocare de date sau interfață cu utilizatorul.
În capitolul 3 sunt prezentate și evaluate trei componente software frecvent utilizate în
dezvoltarea de aplicații pentru sistemele dedicate cu microcontroler.
Prima componentă software este un nucleu de automat finit. Sunt descrise etapele de
implementare și evaluare ale unui nucleu software de automat finit. Acest modul poate fi utilizat în
procesul de dezvoltare al aplicațiilor software pentru sisteme dedicate. Automatele finite sunt
printre cele mai folosite componente în crearea aplicațiilor software pentru sistemele dedicate.
Implementarea personalizată a automatelor finite necesită timp și este predispusă la erori. O
abordare eficientă este proiectarea unui nucleu care, pe baza unei descrieri adecvate, realizează
execuția unui automat finit. Prin utilizarea unui nucleu, un proiectant de sisteme dedicate trebuie să
specifice numai acțiunile, condițiile și tranzițiile, ca simple funcții și tabele și să lase motorul să se
ocupe de ansamblul operaţiilor interne necesare pentru a executa automatul finit.
Principalul avantaj al utilizării unui automat în proiectarea aplicațiilor software pentru
sisteme de calcul dedicate constă în flexibilitatea cu care se poate completa, șterge sau schimba
descrierea structurii automatului fără a genera un impact deosebit asupra restului aplicației. Nucleul
software de automat finit este evaluat folosind microcontrolere pe 8 biți ATMega de la Atmel. S-a
constatat un consum redus de resurse de memorie. De asemenea, s-au evaluat și timpii necesari
pentru execuția fiecărei tranziții a automatului finit.
Pentru nucleul software de automat finit s-a proiectat o nouă variantă care include un
mecanism de siguranţă. S-a propus utilizarea unei temporizări pentru fiecare stare pentru a se putea
detecta și evita staționarea într-o stare pentru o perioadă de timp nedefinită.
A doua componentă software prezentată este o bibliotecă cu funcții pentru criptare. Aceste
metode asigură diferite nivele de siguranţă pentru transferul datelor şi nivele asociate de consum de
energie, datorate complexităţii algoritmilor de criptare. Aplicațiile definesc o tabelă de nivele de
securitate cu care se poate realiza codificarea datelor. Fiecare combinaţie are un regim de consum
de energie care îi permite utilizatorului să aleagă cea mai adecvată soluţie care corespunde
necesităţilor aplicaţiei.

Concluzii
68
Implementarea rezultată a algoritmilor de criptare (DES și FEAL) permite o asociere
eficientă între necesităţile de siguranţă ale aplicaţiei şi cerinţele de consum de energie. În
consecinţă, durata de funcţionare a acumulatorului se prelungeşte. Acest aspect are un impact
pozitiv asupra autonomiei şi disponibilităţii sistemului.
Este propusă și o arhitectură autoadaptivă pentru securizarea aplicațiilor executate de
sistemele dedicate. Eficiența unei arhitecturi adaptive pentru securizarea unui sistem de calcul
dedicat este demonstrată prin proiectarea unui experiment. Se constată o scădere cu 31% a energiei
consumate de arhitectura adaptivă față de situația în care s-ar fi utilizat doar cel mai sigur și cel mai
complex algoritm de criptare (DES16) pentru securizarea întregului sistem.
A treia componentă este reprezentată de o metodă pentru conversia automată a expresiilor
aritmetice cu operanzi reprezentați în virgulă mobilă în expresii echivalente cu operanzi reprezentați
în virgulă fixă în aplicațiile pentru sisteme de calcul dedicate. Două obiective conflictuale sunt
considerate în mod simultan: complexitatea computaţională şi precizia calculelor și a rezultatelor.
Sunt vizate filtrele ne-adaptive Direct-Form I cu limite ale variabilelor de intrare predefinite.
Algoritmul prezentat utilizează o funcţie de cost parametrizabilă şi este capabil să producă soluţii
multiple în virgulă fixă pentru aceeaşi expresie dată în virgulă mobilă.
Codul în virgulă fixă generat este testat pe microprocesoare de 8 biţi (AVR ATmega), 16
biţi (MSP430) şi 32 biţi (ARM Cortex-M3). Acesta oferă, în toate cazurile, o viteză de execuţie mai
bună decât dacă s-ar utiliza codul în virgulă mobilă.
Capitolul 4 cuprinde prezentarea a trei metode de proiectare a sistemelor de calcul dedicate
care folosesc circuite digitale reconfigurabile.
Prima metodă prezintă proiectarea unui modul digital (watchdog), care poate fi inclus în
microprocesoare încorporate pentru a asigura detectarea și semnalarea nerespectării caracteristicilor
de timp ale codului care se execută. Monitorizarea comportamentului temporal este realizată prin
măsurarea timpului de execuție a subprogramelor și compararea rezultatelor cu valori de referință.
Comportamentul temporal al unei aplicații în execuție poate influența alte caracteristici ale
sistemului, în special calitatea serviciului oferit. Caracteristicile de siguranță și securitate ale unui
sistem de calcul dedicat pot depinde de comportamentul temporal al aplicației în faza execuție. Este
propus și un model pentru dezvoltarea unei aplicații care folosește această arhitectură de
monitorizare. Pentru a evalua modulul de monitorizare, s-a utilizat Spratan3E de la Xilinx și un
microprocesor soft-core PicoBlaze.
A doua metodă prezentată este utilizată pentru a detecta abateri de la timpul de procesare
alocat proceselor într-un sistem de tip MPSoC. La unitățile de procesare ale structurii MPSoC este
adăugată un modul de monitorizare care urmăreşte infrastructura de comunicație din interiorul
MPSoC. Toate transferurile de date sunt înregistrate, iar parametrii lor de timp sunt comparați cu un
comportament de referinţă aşteptat. Infrastructura de monitorizare urmăreşte accesele memoriei
care sunt emise către adrese ce corespund buffer-ului circular sau informaţiei de control ale buffer-
elor. În acest fel, infrastructura de monitorizare se leagă în mod non-invaziv de sistemul
monitorizat. Infrastructura de comunicație furnizează datele principale de intrare în cadrul structurii
de monitorizare.
Într-o platformă MPSoC, infrastructura de comunicație este un bun punct de observaţie
pentru funcţionarea internă a sistemului pentru că operarea acestuia utilizează din plin resursele de
comunicație. Corectitudinea operării poate fi evaluată analizând parametrii de timp ai comunicației
dintre procesele din cadrul unui MPSoC. Structura de monitorizare este evaluată pe o platformă
Xilinx Virtex6 într-un sistem MPSoC alcătuit din microprocesoare Microblaze și o rețea de
interconectare AEthereal.
A treia metodă prezintă implementarea unui sistem de calcul dedicat prin alocarea dinamică
a funcțiilor sale pe componente hardware și software. Acest mod de implementare este posibil prin
utilizarea de componente reconfigurabile (e.g. circuite FPGA): se implementează o mare parte a
funcțiilor sistemului în componente software executate de nuclee de microprocesoare incluse în
circuitele FPGA, apoi se realizează o analiză a execuției printr-un proces de evaluare a
performanțelor. Această abordare se bazează pe detectarea nucleelor de calcul existente în software

Concluzii
69
(e.g. nuclee repetitive care realizează diverse sarcini de calcul, precum procesări de semnale).
Informaţiile extrase după procesul de analiză dau posibilitatea implementării în hardware a unor
porțiuni de software care pot beneficia în acest fel de o scădere a timpului de execuție (i.e. o
accelerare a execuției).
În capitolul 5 este prezentată proiectarea și implementarea unui modul de testare a
memoriilor folosind tehnica BIST (engl. Built In Self Test). BIST este o tehnică de proiectare a
circuitelor digitale orientată spre testabilitate, prin care logica de testare este plasată pe circuit
alături de blocurile testate (supuse testării). Testul de memorie utilizat pentru implementarea
structurii BIST este MarchS2C. Acest test March are o lungime de 22n şi este capabil să descopere
toate erorile din modelul pentru două celule cuplate. Este realizată și o analiză comparativă cu alte
teste de memorie din care reiese eficiența testului propus. Modulul de testare care execută testul
MarchS2C este implementat ca un automat complex cu o cale de control microprogramată.
6.1 Contribuții personale
Datorită caracteristicilor pe care la au, sistemele de calcul dedicate prezintă multiple
oportunități de cercetare și de dezvoltare. În această teză au fost abordate următoarele aspecte din
domeniul proiectării de sisteme de calcul dedicate:
Proiectarea de sisteme de calcul dedicate cu microcontroler: implementarea și
evaluarea de module software folosite în dezvoltarea de aplicații pentru sistemele de
calcul dedicate
o Modul software pentru implementarea unui model computațional de tip
automat finit. Rezultatele au fost publicate în: (Stan, Botezatu, Panduru, &
Lupu, 2009), (Stan, Botezatu, & Vieriu, 2009).
o Modul software pentru algoritmi de criptare cu evaluarea consumului de
energie și o arhitectură autoadaptabilă pentru securizarea sistemelor dedicate.
Rezultatele au fost publicate în: (Stan & Botezatu, 2009), (Botezatu, Stan, &
Panduru, 2009), (Botezatu, Manta, & Stan, 2010)
o Modul software pentru conversia expresiilor cu operanzi în virgulă mobilă în
expresii cu operații și operanzi în virgulă fixă. Rezultatele au fost publicate
în: (Bârleanu, Băitoiu, & Stan, 2011b), (Bârleanu, Băitoiu, & Stan, 2011).
Proiectarea de sisteme de calcul dedicate cu circuite FPGA:
o Module hardware de verificare a corectitudinii execuției aplicațiilor pe
sisteme dedicate cu circuite FPGA. Rezultatele au fost publicate în: (Stan,
Panduru, & Ungureanu, 2010), (Stan, Valachi, & Bârleanu, 2011).
o Modul hardware pentru generarea de module hardware din evaluarea
execuției aplicațiilor pe microprocesoare softcore (i.e. microprocesoare
descrise în limbaje HDL și incluse în circuitul FPGA). Rezultatele au fost
publicate în: (Popa & Stan, 2010).
Proiectarea unei structuri autotestabile pentru module de memorie:
o Modul autotestabil de memorie RAM: proiectare algoritm de testare
MARCH pentru defecte de cuplaj între două celule și proiectarea logicii de
testare microprogramate. Rezultatele au fost publicate în: (Cașcaval & Stan,
2007), (Cașcaval, Silion, & Stan, 2006), (Cașcaval, Silion, & Stan, 2007).
Activitățile de cercetare și dezvoltare au fost complementate cu realizarea de sisteme de
calcul dedicate în cadrul unor granturi de cercetare. Aceste sisteme de calcul dedicate au făcut
obiectul următoarelor publicații: (Stan, Lupu, & Ciorap, 2010), (Stan, Panduru, & Lupu R, 2008),
(Lupu, Stan, & Ungureanu, 2008), (Lupu, Stan, & Ungureanu, 2009), (Ciorap, Carauleanu, Petcu,
Pomazan, & Stan, 2008).

Concluzii
70
6.2 Diseminare rezultate
Activitățile de cercetare și dezvoltate efectuate au condus la rezultate care au făcut obiectul
publicațiilor prezentate în continuare.
6.2.1 Sumar publicaţii
1 capitol de carte editura Springer
1 carte în editură naţională
2 articole în jurnale indexate ISI
1 articol în jurnal indexat BDI
4 articole în jurnale indexate B+
4 articole în conferinţe ISI Proceedings
2 articole în conferinţe BDI: IEEE Explore
11 Articole apărute în volumele conferințelor, congreselor, simpozioanelor
6.2.2 Detalii publicaţii
1 capitol de carte editura Springer
Robert G. Lupu, Andrei Stan, Florina Ungureanu, Patient Monitoring: Wearable device for patient
monitoring, Advances in Electrical Engineering and Computational Science, vol: 39, pp: 659-668,
Springer Netherlands, 2009, ISBN 978-90-481-2310-0 (Print), 978-90-481-2311-7 (Online),
1 carte în editură naţională
Al. Bârleanu, A. Stan, Sistem de dezvoltare cu microcontroler-ul 80C31, Ed. Performantica, Iaşi,
2003
2 articole în jurnale indexate ISI
Florina Ungureanu, Robert Gabriel Lupu, Andrei Stan, Ioan Craciun, Carmen Teodosiu, Towards
Real Time Monitoring of Water Quality in River Basins, Environmental Engineering and
Management Journal, September 2010, Vol.9, No. 9, Pages: 1267-1274, (revista ISI, Impact factor
0.885), ISSN: 1582-9596, http://omicron.ch.tuiasi.ro/EEMJ/
Al. Bârleanu, V. Baitoiu, A. Stan, Digital filter optimization for C language, Advances in Electrical
and Computer Engineering, Pages: 111 - 114, Volume 11, Number 3, 2011 (revista ISI, Impact
Factor: 0.688), ISSN: 1582-7445, http://www.aece.ro/index.php
1 articol în jurnal indexat BDI
R. Ciorap, D. Zaharia, C. Corciovă, M. Ungureanu, R. Lupu, A. Stan, Dispozitiv Wireless pentru
Monitorizarea Pacienţilor cu Afecţiuni Cronice, Revista Medico-Chirurgicală a Societăţii de
medici şi Naturalişti din Iaşi, vol. 112, nr. 4, octombrie – decembrie 2008
4 articole în jurnale indexate B+
P. Caşcaval, R. Silion, A. Stan, MARCHS2C: A Test for All Static 2-Cell RAM Coupling Faults,
Buletinul Institutului Politehnic din Iaşi, Tomul LII (LVI), Fasc. 1 – 4, 2006
A. Stan, N. Botezatu, L. Panduru, R. Lupu, A finite state machine model used in embedded systems
software development, Buletinul Institutului Politehnic din Iaşi, Tomul LV(LIX), Fasc. 2, 2009

Concluzii
71
N. Botezatu, A. Stan, Low Power Embedded System Used In Healthcare Systems, Buletinul
Institutului Politehnic din Iaşi, Tomul LV(LIX), Fasc. 1, 2009
C. Popa, A. Stan, Mach Speed Processing. Dynamic Cloning of Software Functionality in
Hardware, Buletinul Institutului Politehnic din Iaşi, Tomul LVI(LX), Fasc. 2, 2010
4 articole în conferinţe ISI Proceedings
Robert G. Lupu, Andrei Stan, Florina Ungureanu, Wireless Device for Patient Monitoring, Lecture
Notes in Engineering and Computer Science Pages: 1687-1691, Published: 2008 (proceedings of
World Congress on Engineering 2008, Imperial Collage London, London, England, july 02-04,
2008). (ISI proceedings) ISBN: 978-988-98671-9-5,
Stan A, Panduru L, Lupu R, Low Power Devices for Gestural Human - Computer Interaction,
Annals of DAAAM for 2008 & Proceedings of the 19th International DAAAM Symposium -
Intelligent Manufacturing & Automation: Focus on Next Generation of Intelligent Systems and
Solution, Pages: 1287-1288, Published: 2008, 19th International Symposium of the Danube-Adria-
Association-for-Automation-and-Manufacturing Trnava, SLOVAKIA, OCT 22-25, 2008, ISSN:
1726-9679, ISBN: 978-3-901509-68-1,
N. Botezatu, A. Stan, L. Panduru, Power-Aware Framework For Encrypted Communications, 20th
International Danube-Adria-Association-for-Automation-and-Manufacturing Symposium, Vienna,
Austria, 25-28th November 2009, Pages: 825-826, ISSN: 1726-9679 ISBN: 978-3-901509-70-4
A. Stan, N. Botezatu, G. Vieriu, The Design Of A Finite State Machine Engine With Safe Operation
Used In Embedded Systems Design, 20th International Danube-Adria-Association-for-Automation-
and-Manufacturing Symposium, Vienna, Austria, 25-28th November 2009, Pages: 1507-1508,
ISSN: 1726-9679 ISBN: 978-3-901509-70-4
2 articole în conferinţe BDI: IEEE Explore
A. Stan, Al. Valachi, Al. Bârleanu, The design of a run-time monitoring structure for a MPSoC,
15th
International Conference on System Theory and Control, October 14-16, 2011, Sinaia,
Romania
Al. Bârleanu, V. Baitoiu, A. Stan, Floating-point to fixed-point code conversion with variable
trade-off between computational complexity and accuracy loss, 15th
International Conference on
System Theory and Control, October 14-16, 2011, Sinaia, Romania
11 Articole apărute in volumele conferințelor/congreselor/simpozioanelor
2007
P. Caşcaval, A. Stan, March Test for All Static 2-Coupling Faults in Random-Access Memories, 9th
International Symposium on Automatic Control and Computer Science, Iaşi, Romania, November
16-17, 2007
P. Caşcaval, R. Silion, A. Stan, A Logic Design for MarchS2C Memory BIST Implementation, 9th
International Symposium on Automatic Control and Computer Science, Iaşi, Romania, November
16-17, 2007
2008
R. Ciorap, A. Cărăuleanu, L. Petcu, V. Pomazan, A. Stan, E-Health Solution for Monitoring the
Evolution of the Chronically Disease at the Pregnant Women, UPB BIOINGTEH – Exploratory

Concluzii
72
Workshop, Advanced Materials & Technologies in Biology and Medicine, Poiana Braşov,
Romania, September 2008
R. Lupu, A. Stan, F. Ungureanu, A Low Power Device for ECG Monitoring, 9TH International
Carpathian Control Conference, Sinaia, Romania May 25-28, 2008
2009
D. T. Bălănescu, C-tin E. Hriţcu, A. Stan, Upgrade of the Power Adjustment system of a 24 kW
Wall-mounted Condensing Combination Boiler, 3rd
International Conference on Thermal Engines
and Environmental Engineering, Galaţi, Romania, June 4-6, 2009
A. Stan, N. Botezatu, Data Encryption Methods for Power Aware Embedded Systems Used in
Patient Monitoring, International Carpathian Control Conference ICCC2009, Zakopane, Poland,
May 24-27, 2009
2010
A. Stan, R. Lupu, M. Ciorap, R. Ciorap, Biosignal Monitoring and Processing for Management of
Hypertension, 12th
Mediteranean Conference on Medical and Biological Engineering and
Computing, May 27-30, Chalkidiki, Greece
A. Stan, L. Panduru, Fl. Ungureanu, Architectural Support for Subroutine Execution Time
Monitoring in Embedded Microprocessors, 14th
International Conference on System Theory and
Control, October 17-19, Sinaia, Romania
N. Botezatu, V. Manta, A. Stan, Self Adaptable Architecture for Power-Aware Embedded Systems,
14th
International Conference on System Theory and Control, October 17-19, Sinaia, Romania
2011
Botezatu, N. Manta, V. and Stan, A., 2011. Self-adaptability in Secure Embedded Systems: an
Energy-performance Trade-off. In: Proceedings of the World Congress on Engineering, The 2011
International Conference of Information Security and Internet Engineering, Hong Kong:
Newswood Limited, pp. 495-499.
Botezatu, N. and Stan, A., 2011. Denial of Service resistant MAC for wireless mesh networks.
Pending acceptance at the 22nd DAAAM International World Symposium, 23-26 November,
Vienna, Austria.
Membru în 5 granturi de cercetare
PNII 11-067/18.09.2007 Sistem integrat de telemonitorizare în timp real a pacienţilor şi
persoanelor în vârstă, membru în echipa de cercetare
PNII 11-070/ 18.09.2007 Soluţie integrată e-health de monitorizare a parametrilor vitali la
pacienţii cu afecţiuni cronice, membru în echipa de cercetare
CNCSIS type A, code 231, 2006-2007, RAM memory tests for coupling static and dynamic faults.
membru în echipa de cercetare
56 – CEEX II03/27.07.2006 Sistem pentru terapia personalizată a tulburărilor de expresie
lingvistică, membru în echipa de cercetare
131 – CEEX II02/02.10.2006 Interacţiunea gestuală cu sistemele informatice şi robotice, membru
în echipa de cercetare

Concluzii
73
6.3 Direcții viitoare de cercetare
Temele abordate în această teză aparțin domeniului proiectării arhitecturilor de sisteme de
calcul dedicate și deschid multiple oportunități de cercetare ulterioară. Subiectele tratate acoperă o
plajă largă a proiectării de sisteme de calcul dedicate de la proiectarea de module software până la
proiectarea de module hardware.
Capitolul trei prezintă proiectarea de biblioteci și module software utilizate în dezvoltarea
aplicațiilor pentru sistemele de calcul dedicate. Modulul software pentru implementarea de
automate finite poate fi extins prin adăugarea de câmpuri cu ajutorul cărora să se modeleze și
implementeze diverse funcționalități complexe impuse de aplicații (e.g. suport pentru metastări și
automate ierarhice, validări suplimentare pentru tranziții și acțiuni în scopul măririi siguranței
operării). Modelul poate face obiectul refactorizării codului în vederea eficientizării execuției pentru
cazul cel mai comun. Acest lucru se poate obține prin analiza atentă a caracteristicilor aplicațiilor
care fac uz de acest nucleu. O altă direcție de dezvoltare este proiectarea de aplicații (cu interfață
grafică) care să genereze în mod automat structurile de date utilizate de nucleul pentru automate
finite pe baza descrierii oferite de utilizatori este. Biblioteca de algoritmi de criptare poate fi extinsă
cu noi algoritmi cu performanțe de securizare și necesar de resurse diferite. De asemenea se are în
vedere dezvoltarea de componente (frameworks) pentru adaptarea dinamică a necesarului de
securizare al aplicațiilor la condițiile de mediu în care operează sistemele dedicate. Modulul pentru
conversia expresiilor din virgulă mobilă în expresii în virgulă fixă poate fi extins cu alte tipuri
întregi (e.g. 48 biți, 24 biți) sau poate fi orientat spre generarea de cod în limbaje de descriere
hardware care să permită implementarea expresiilor în circuite reconfigurabile. Toate bibliotecile și
modulele software pot beneficia de exprimarea la momentul proiectării a unor particularități ale
arhitecturii hardware pe care urmează să fie executate (e.g. prezența unor instrucțiuni de divizare,
prezența unor moduri de adresare speciale).
Capitolul patru prezintă proiectarea de sisteme dedicate folosind circuite reconfigurabile.
Sunt proiectate structuri pentru monitorizarea corectitudinii execuției aplicațiilor pe astfel de
sisteme. Aceste structuri de monitorizare pot fi folosite pentru implementarea de sisteme autonome
care să-și poată ajusta parametrii de funcționare sau structura funcție de condițiile curente de
execuție sau ale mediului astfel încât să mențină calitatea serviciilor oferite în situațiile de alterare a
funcționării unor componente ale sistemului. Pe lângă creșterea nivelului de încredere în
funcționarea corectă a sistemelor pe care aceste mecanisme de monitorizare îl oferă, ele pot fi un
element dintr-un lanț decizional cu care să se implementeze sisteme de calcul autonome: detecție,
cuantificare, verificare, raportare și gestionare. Sistemele reconfigurabile pot fi folosite în
transformarea dinamică a implementării funcțiilor unui sistem de calcul dedicat din implementare
software în implementare hardware. Această transformare necesită un studiu mai aprofundat pentru
a dezvolta metode și algoritmi performanți și generali (e.g. să poată gestiona eficient complexitatea
codului executat de aplicații).
Capitolul cinci propune o metodă de implementare a unui algoritm de testare a integrității
unui modul de memorie prin utilizarea unei structuri autotestabile microprogramate. Acest tip de
structură poate fi folosită și pentru execuția altor teste de memorie proiectate pentru detectarea altor
tipuri de defecte sau pentru memorii cu alte moduri de organizare. Structurile autotestabile cu
control microprogramat sunt structuri flexibile care pot fi utilizate în testarea corectei funcționări a
componentelor unui sistem de calcul.

74
Bibliografie
Ahuja, S., Gurumani, S., Spackman, C., & Shukla, S. (2009). Hardware Coprocessor Synthesis
from an ANSI C Specification. IEEE Design & Test of Computers, Vol. 6(No. 4), 58 - 67.
doi:10.1109/MDT.2009.81
Arora, D., Raghunathan, A., & Jha, N. K. (2006). Architectural Support for Safe Software
Execution on Embedded Processors. Proceedings of the 4th international conference on
Hardware/software codesign and system synthesis (pg. 106 - 111). New York: ACM.
doi:10.1145/1176254.1176281
Arora, D., Ravi, S., Raghunathan, A., & Jha, N. (2005). Secure Embedded Processing through
Hardware-assisted Run-time Monitoring. Proceedings of Design, Automation and Test in
Europe (pg. 178 - 183 Vol. 1). IEEE. doi:10.1109/DATE.2005.266
Atmel Inc. (2011). Atmel megaAVR Microcontrollers. Preluat de pe
http://www.atmel.com/dyn/products/devices.asp?category_id=163&family_id=607&subfam
ily_id=760
Avizienis, A., Laprie, J., & Randell, B. (2004). Dependability and its threats - A taxonomy. IFIP
Congress Topical Sessions (pg. 91-120). Kluwer.
Balanescu, D., Hritcu, C., & Stan, A. (2009). Upgrade of the Power Adjustment system of a 24 kW
Wall-mounted Condensing Combination Boiler. 3rd International Conference on Thermal
Engines and Environmental Engineering. Galati, Romania.
Bapatla, S., & Chandramouli, R. (2004). Battery power optimized encryption. IEEE International
Conference on Communications, (pg. 3802 - 3806). doi:10.1109/ICC.2004.1313264
Bârleanu, A., & Stan, A. (2003). Sistem de dezvoltare cu microcontroler-ul 80C31, ISBN 973-8048-
35-4. Iași: Ed. Performantica.
Bârleanu, A., Băitoiu, V., & Stan, A. (2011). Floating-point to fixed-point code conversion with
variable trade-off between computational complexity and accuracy loss. 15th International
Conference on System Theory and Control. Sinaia, Romania.
Bârleanu, A., Băitoiu, V., & Stan, A. (2011b). Digital filter optimization for C language. Advances
in Electrical and Computer Engineering, ISSN: 1582-7445, (revista ISI, Impact Factor:
0.688), Vol. 11(Nr. 3), 111 - 114.
Bobda, C. (2007). Introduction to reconfigurable computing - Architectures, algorithms and
applications. Dordrecht, The Netherlands: Springer.
Bolchini, C., Miele, A., & Sandionigi, C. (2011). A Novel Design Methodology for Implementing
Reliability-Aware Systems on SRAM-Based FPGAs. IEEE Transactions on Computers,
Vol. 60(No. 12), 1744 - 1758. doi:10.1109/TC.2010.281
Botezatu, N., & Stan, A. (2009). Low Power Embedded System Used In Healthcare Systems.
Buletinul Institutului Politehnic din Iasi, Tomul LV(LIX)(Fasc. 1).
Botezatu, N., & Stan, A. (2011). Denial of Service resistant MAC for wireless mesh networks. 22nd
DAAAM International World Symposium. Vienna, Austria.
Botezatu, N., Manta, V., & Stan, A. (2010). Self Adaptable Architecture for Power-Aware
Embedded Systems. 14th International Conference on System Theory and Control. Sinaia,
Romania.
Botezatu, N., Manta, V., & Stan, A. (2011). Self-adaptability in Secure Embedded Systems: an
Energy-performance Trade-off. Proceedings of the World Congress on Engineering The
2011 International Conference of Information Security and Internet Engineering, (pg. 495 -
499). Hong Kong.

Bibliografie
75
Botezatu, N., Stan, A., & Panduru, L. (2009). Power-Aware Framework For Encrypted
Communications. 20th International Danube-Adria-Association for Automation and
Manufacturing Symposium, (pg. 825 - 826). Vienna, Austria.
Caşcaval, P., & Bennett, S. (2001). Efficient march test for 3-coupling faults in random access
memories. Microprocessors and Microsystems, Vol. 24(No. 10), 501 - 509.
doi:10.1016/S0141-9331(00)00103-4
Cașcaval, P., & Stan, A. (2007). March Test for All Static 2-Coupling Faults in Random-Access
Memories. 9th International Symposium on Automatic Control and Computer Science. Iasi,
Romania.
Caşcaval, P., Bennett, S., & Huţanu, C. (2004). Efficient March Tests for a Reduced 3-Coupling
and 4-Coupling Faults in Random-Access Memories. Journal of Electronic Testing, Vol.
20(No. 3), 227 - 243. doi:10.1023/B:JETT.0000029457.21312.23
Cașcaval, P., Silion, R., & Stan, A. (2006). MARCHS2C: A Test for All Static 2-Cell RAM
Coupling Faults. Buletinul Institutului Politehnic din Iasi, Tomul LII (LVI)(Fasc. 1 – 4).
Cașcaval, P., Silion, R., & Stan, A. (2007). A Logic Design for MarchS2C Memory BIST
Implementation. 9th International Symposium on Automatic Control and Computer Science.
Iasi, Romania.
Cilio, A., & Corporaal, H. (1999). Floating Point to Fixed Point Conversion of C Code.
Proceedings of the 8th International Conference on Compiler Construction (pg. 229 - 243).
Amsterdam, The Netherlands: Springer.
Ciorap, R., Carauleanu, A., Petcu, L., Pomazan, V., & Stan, A. (2008). E-Health Solution for
Monitoring the Evolution of the Chronically Disease at the Pregnant Women. UPB
BIOINGTEH – Exploratory Workshop, Advanced Materials & Technologies in Biology and
Medicine. Poiana Brasov, Romania.
Ciorap, R., Zaharia, D., Corciova, C., Ungureanu, M., Lupu, R., & Stan, A. (2008). Dispozitiv
Wireless pentru Monitorizarea Pacientilor cu Afectiuni Cronice. Revista Medico-
Chirurgicala a Societatii de medici si Naturalisti din Iasi, Vol. 112(No. 4).
Cummings, C. (2002). Simulation and synthesis techniques for asynchronous FIFO design. SNUG.
San Jose.
Cypress Inc. (2011). Programmable System-on-Chip. Preluat de pe
http://www.cypress.com/?id=1353
De Bosschere, K., Luk, W., Martorell, X., Navarro, N., O'Boyle, M., Pnevmatikatos, D., . . .
Temam, O. (2007). High-Performance Embedded Architecture and Compilation Roadmap.
În P. Stenstrom (Ed.), LNCS 4050, Transactions on High Performance Embedded
Architectures and Compilers I (pg. 5-29). Berlin: Springer-Verlag.
De Jonge, J., & Smeulders, A. (1976). Moving Inversion Test Pattern is. Computer System Desig,
Vol. 19(No. 5), 169 - 173.
Duranton, M., Yehia, S., De Sutter, B., De Bosschere, K., Cohen, A., Falsafi, B., . . . Valero, M.
(2010). THE HIPEAC VISION. European Network of Excellence on High Performance and
Embedded Architecture and Compilation.
Goldberg, D. (1991). What Every Computer Scientist Should Know About Floating-Point
Arithmetic. ACM Computing Surveys, Vol. 23(No. 1). doi:10.1145/103162.103163
Goossens, K., Dielissen, J., & Radulescu, A. (2005). AEthereal network on chip: concepts,
architectures, and implementations. IEEE Design & Test of Computers, Vol. 22(No. 5), 414-
421. doi:10.1109/MDT.2005.99
Goossens, K., Vermeulen, B., & Nejad, A. (2009). A high-level debug environment for
communication-centric debug. Design, Automation & Test in Europe Conference &
Exhibition, 2009 (pg. 202-207 ). Nice: IEEE.
Hamdioui, S., & Van De Goor, A. (2000). An experimental analysis of spot defects in SRAMs:
realistic fault models and tests. Proceedings of the Ninth Asian Test Symposium (pg. 131 -
138). Taipei , Taiwan: IEEE. doi:10.1109/ATS.2000.893615

Bibliografie
76
Hamdioui, S., van de Goor, A., & Rodgers, M. (2002). March SS: A Test for All Static Simple
RAM Faults. IEEE International Workshop on Memory Technology, Design and Testing
(pg. 95 - 100). IEEE. doi:10.1109/MTDT.2002.1029769
Han, K. (1996). Automating transformations from floating-point to fixed-point. Austin: Faculty of
the Graduate School of the University of Texas at Austin.
Hansson, A., Ekerhult, M., Molnos, A., Milutinovic, A., Nelson, A., Ambrose, J., & Goossens, K.
(2011). Design and implementation of an operating system for composable processor
sharing. Microprocessors and Microsystems, Vol. 35(No. 2), 246-260.
doi:10.1016/j.micpro.2010.08.008
Harel, D. (2009). Statecharts in the making: a personal account. Communications of the ACM, Vol.
52(No. 3), 67-75. doi:10.1145/1467247.1467274
Hauck, S., & Dehon, A. (2008). Reconfigurable computing. Burlington: Mogran Kaufmann.
Hennessy, J., & Patterson, D. (2007). Computer Architecture: A Quantitative Approach, 4th
Edition. Morgan Kaufmann.
IAR Systems. (2011). IAR Embedded Workbench for Atmel AVR. Preluat de pe
http://www.iar.com/en/Products/IAR-Embedded-Workbench/AVR/
IAR Systems. (2011). IAR Visual State. Preluat de pe http://www.iar.com/en/Products/IAR-
visualSTATE/
IEC 60730. (2000). Automatic electrical controls for household and similar use. IEC Standard.
IEC 61508. (2002). Functional safety of electrical/electronic/programmable electronic safety-
related systems. IEC Standard.
Kearfott, R. (1996). Interval Computations: Introduction, Uses, and Resources. Euromath Bulletin,
Vol. 2(No. 1), 95-112.
Kim, V., & Chen, T. (1999). On Comparing Functional Fault Coverage and Defect Coverage for
Memory Testing. IEEE Transactions on CAD, Vol. 18(No. 11), 1676 - 1683.
doi:10.1109/43.806812
Klein, R., & Moona, R. (2004). Migrating software to hardware on FPGAs. Proceedings of IEEE
International Conference on Field-Programmable Technology (pg. 217 - 224). IEEE.
doi:10.1109/FPT.2004.1393271
Kocher, P., Lee, R., McGraw, G., & Raghunathan, A. (2004). Security as a New Dimmension in
Embedded System Design. Proceedings of the 41st annual Design Automation Conference
(pg. 753-760). New York, USA: ACM. doi:10.1145/996566.996771
Kum, K., Kang, J., & Sung, W. (2000). AUTOSCALER For C: An Optimizing Floating-Point to
Integer C Program Converter For Fixed-Point Digital Signal Processors. IEEE Trans. on
Circuits and Systems II: Analog and Digital Signal Processing, Vol. 47(No. 9), 840-848.
Larsson, E., Vermeulen, B., & Goossens, K. (2010). A distributed architecture to check global
properties for post-silicon debug. 15th IEEE European Test Symposium (ETS), 2010 (pg.
182 - 187). Praha: IEEE. doi:10.1109/ETSYM.2010.5512760
Lee, E. (2002). Embedded software. În Advances in Computers (Vol. 56, pg. 55-95). Elsevier.
doi:10.1016/S0065-2458(02)80004-3
Lee, G., & Milne, G. (2005). Programming paradigms for reconfigurable computing.
Microprocessors and Microsystems, 435-450. doi:10.1016/j.micpro.2005.01.002
Lupu, R., Stan, A., & Ungureanu, F. (2008). Wireless Device for Patient Monitoring. Proceedings
of World Congress on Engineering, (pg. 1687-1691). London.
Lupu, R., Stan, A., & Ungureanu, F. (2009). Patient Monitoring: Wearable device for patient
monitoring. În Advances in Electrical Engineering and Computational Science (pg. 659 -
668). Springer Netherlands.
Lysecky , R., Stitt, G., & Vahid, F. (2006). Warp Processors. Proceedings of the 41st annual Design
Automation Conference (pg. 659 - 681). New York: ACM. doi:10.1145/996566.1142986
Lysecky, R., & Vahid, F. (2009). Design and implementation of a MicroBlaze-based warp
processor. ACM Transactions on Embedded Computing Systems, Vol. 8(No. 3), 22 - 43.
doi:10.1145/1509288.1509294

Bibliografie
77
Mahmood, A., & McCluskey, E. (1988). Concurrent Error Detection Using Watchdog Processors –
A Survey. IEEE Transactions on Computers, Vol. 37(No. 2), 160 - 174.
doi:10.1109/12.2145
Menard, D., Chillet, D., Charot, F., & Sentieys, O. (2002). Automatic Floating-point to Fixed-point
Conversion for DSP Code Generation. International Conference on Compilers,
Architecture, and Synthesis for Embedded Systems (pg. 270 - 276). New York: ACM.
doi:10.1145/581630.581674 ISBN:1-58113-575-0
Menezes, A., van Oorschot, P., & Vanstone, S. (1996). Handbook of Applied Cryptography (ed. 1).
Boca Raton: CRC Press.
Microchip Inc. (2011). Configurable Logic Cell. Preluat de pe
http://www.microchip.com/wwwproducts/Devices.aspx?dDocName=en552961
Micronsemi Inc. (2011). SmartFusion: Intelligent Innovative Integration. Preluat de pe
http://www.actel.com/products/smartfusion/
Naeser, G., Asplund, L., & Furunäs, J. (2005). SafetyChip: a time monitoring and policing device.
Annual ACM SIGAda international conference on Ada: The Engineering of Correct and
Reliable Software for Real-Time & Distributed Systems using Ada and Related Technologies
(pg. 63 - 68). New York: ACM. doi:10.1145/1104011.1103856
Nair, R., Thatte, S., & Abraham, J. (1978). Efficient Algorithms for Testing Semiconductor
Random-Access Memories. IEEE Transactions on Computers (pg. 572 - 576). IEEE.
doi:10.1109/TC.1978.1675150
Nieuwland, A., Kang, J., Gangwal, O., Sethuraman, R., Busá, N., Goossens, K., . . . Lippens, P.
(2002). C-HEAP: A Heterogeneous Multi-Processor Architecture Template and Scalable
and Flexible Protocol for the Design of Embedded Signal Processing Systems. Design
Automation for Embedded Systems, Vol. 7(No. 3), 233 - 270. doi:10.1023/A:1019782306621
Papadomanolakis, K., Kakarountas, A., Sklavos, N., & Goutis, C. (2002). A fast Johnson-Mobius
encoding scheme for fault secure binary counters. Design, Automation and Test in Europe.
Philips Semiconductor Inc. (2002). Device Transaction Level (DTL) Protocol Specification. Preluat
de pe Device Transaction Level (DTL) Protocol Specification.
Popa, C., & Stan, A. (2010). Mach Speed Processing. Dynamic Cloning of Software Functionality
in Hardware. Buletinul Institutului Politehnic din Iasi, Tomul LVI(LX)(Fasc. 2).
Ragel, R., Parameswaran, S., & Mohammad Kia, S. (2005). Micro Embedded Monitoring for
Security in Application Specific Instruction-set Precessors. Proceedings of the 2005
international conference on Compilers, architectures and synthesis for embedded systems
(pg. 304 - 314). New York: ACM. doi:10.1145/1086297.1086337
Ravi, S., Raghunathan, A., Kocher, P., & Hattangady, S. (2004). Security in embedded systems:
Design challenges. ACM Transactions on Embedded Computing Systems, Vol. 3(No. 3), 461
- 491. doi:10.1145/1015047.1015049
Rowley Associates. (2011). CrossWorks for ARM. Preluat de pe
http://www.rowley.co.uk/arm/index.htm
Salewski, F., & Taylor, A. (2007). Fault Handling in FPGAs and Microcontrollers in Safety-Critical
Embedded Applications: A Comparative Survey. 10th Euromicro Conference on Digital
System Design Architectures, Methods and Tools, 2007 (pg. 124-131). IEEE.
doi:10.1109/DSD.2007.4341459
Samek, M. (2009). Practical UML Statecharts in C/C++, Second Edition: Event-Driven
Programming for Embedded Systems. Newnes (imprint of Elsevier).
Sekanina, L. (2003). Towards Evolvable IP Cores for FPGA. NASA/DoD Conference on Evolvable
Hardware, 2003. Proceedings. (pg. 145-154). IEEE. doi:10.1109/EH.2003.1217659
Shi, C., & Brodersen, R. (2003). An Automated Floating-point to Fixed-point Conversion
Methodology. Proc. of IEEE International Conf. on Acoustics, Speech, and Signal
Processing vol.2 (pg. II - 529-32). Hong Kong: IEEE Xplore.
doi:10.1109/ICASSP.2003.1202420

Bibliografie
78
Sima, M., Coțofană, S., Vassiliadis, S., van Eijndhoven, J., & Vissers, K. (2001). A Reconfigurable
Functional Unit for TriMedia/CPU64. A case study. Systems, Architectures, Modeling, and
Simulation Workshop – SAMOS (pg. 224 - 241). Springer-Verlag.
Singh, S. (2011). Computing without processors. Communications of the ACM, Vol. 54(No. 8), 46-
54. doi:10.1145/1978542.1978558
Sorin, D. (2009). Fault Tolerant Computer Architecture. Morgan & Claypool.
ST Microelectronics. (2011). STM32 - 32-bit ARM Cortex MCUs. Preluat de pe
http://www.st.com/internet/mcu/class/1734.jsp
Stallings, W. (2010). Computer organization and architecture - Designing for performance (8th
edition). Upper Saddle River, New Jersey: Pearson Education.
Stan, A., & Botezatu, N. (2009). Data Encryption Methods for Power Aware Embedded Systems
Used in Patient Monitoring. International Carpathian Control Conference. Zakopane,
Poland.
Stan, A., Botezatu, N., & Vieriu, G. (2009). The Design Of A Finite State Machine Engine With
Safe Operation Used In Embedded Systems Design. 20th International Danube-Adria-
Association for Automation and Manufacturing Symposium, (pg. 1507-1508). Vienna,
Austria.
Stan, A., Botezatu, N., Panduru, L., & Lupu, R. (2009). A finite state machine model used in
embedded systems software development. Buletinul Institutului Politehnic din Iasi, Tomul
LV(LIX)(Fasc. 2).
Stan, A., Lupu, R., & Ciorap, R. (2010). Biosignal Monitoring and Processing for Management of
Hypertension. 12th Mediteranean Conference on Medical and Biological Engineering and
Computing. Chalkidiki, Greece.
Stan, A., Panduru, L., & Lupu R. (2008). Low Power Devices for Gestural Human - Computer
Interaction. 19th International DAAAM Symposium - Intelligent Manufacturing &
Automation: Focus on Next Generation of Intelligent Systems and Solution, (pg. 1287-
1288). Trnava, SLOVAKIA.
Stan, A., Panduru, L., & Ungureanu, F. (2010). Architectural Support for Subroutine Execution
Time Monitoring in Embedded Microprocessors. 14th International Conference on System
Theory and Control. Sinaia, Romania.
Stan, A., Valachi, A., & Bârleanu, A. (2011). The design of a run-time monitoring structure for a
MPSoC. 15th International Conference on System Theory and Control. Sinaia, Romania.
Steiner, G., Shenoy, K., Isaacs, D., & Pellerin, D. (2006, November). Accelerate algorithms with
FPGA processors. Electronic Engineering Times-Asia, 1-4.
Stroustrup, B. (2011, July 4). Bjarne Stroustrup's FAQ. Preluat de pe
http://www2.research.att.com/~bs/bs_faq.html
Suk, D., & Reddy, S. (1981). A March Test for Functional Faults in Semiconductor Random Access
Memories. IEEE Transactions on Computers, Vol. C-30(No. 12), 982 - 985.
doi:10.1109/TC.1981.1675739
Sukittanon, S., & Dame, S. (2006). Algorithm – Embedded State Machine Design for PSoC using C
Programming. Preluat pe 9 1, 2011, de pe http://www.psocdeveloper.com/docs/appnotes/an-
mode/detail/an-pointer/an2329/an-file/125.html
Thiele, L., & Wilhelm, R. (2004). Design for Timing Predictability. Journal of Real Time Systems,
157-177.
Tong, J., & Khalid, M. (2008). Profiling Tools for FPGA-Based Embedded Systems: Survey and
Quantitative Comparison. Journal of Computers, Vol. 3(No. 6). doi:10.4304/jcp.3.6.1-14
Tudor, D., & Marcu, M. (2009). Designing a power efficiency framework for battery powered
systems. Proceedings of SYSTOR 2009: The Israeli Experimental Systems Conference.
ACM. doi:10.1145/1534530.1534537
Ungureanu, F., Lupu, R., & Stan, A. (2011). Towards Real Time Monitoring of Water Quality in
River Basins. Environmental Engineering and Management Journal, ISSN: 1582-9596,
(revista ISI, Impact factor 0.885), Vol. 9(No. 9), 1267 - 1274.

Bibliografie
79
Van de Goor, A. J. (1993). Using march tests to test SRAMs. IEEE Design & Test of Computers,
Vol. 10(No. 1), 8 - 14. doi:10.1109/54.199799
Van de Goor, A. J. (1998). Testing Semiconductors Memories. Theory and Practice. John Wiley &
Sons Inc.
Van de Goor, A. J., & Al-Ars, Z. (2000). Functional Faults Models: A Formal Notation and
Taxonomy. Proceedings VLSI Test Symposium, 2000, (pg. 281 - 289).
doi:10.1109/VTEST.2000.843856
Van de Goor, A. J., & Gaydadjiev, G. N. (1997). March U: A Test for All Unlinked Memory Faults.
IEEE Proceedings Circuits, Devices and Systems, 144, pg. 155 - 160. doi:10.1049/ip-
cds:19971147
Van de Goor, A. J., Gaydadjiev, G. N., Mikitjuk, V. G., & Yarmolik, V. N. (1996). March LR: a
test for realistic linked faults. Proceedings of 14th VLSI Test Symposium, (pg. 272 - 280).
doi:10.1109/VTEST.1996.510868
Van de Goor, A., & De Neef, J. (1999). Industrial Evaluation of DRAMs Tests. Proceedings of
Design Automation and Test in Europe, (pg. 623 - 630). Munich.
Van de Goor, A., Gaydadjiev, G. N., Yarmolik, V. N., & Mikitjuk, V. G. (1997). March LA: a test
for linked memory faults. Proceedings of European Design and Test Conference, (pg. 627 -
634). doi:10.1109/EDTC.1997.582440
Vassiliadis, S., Wong, S., & Cotofana, S. (2003). Microcode processing: Positioning and directions.
IEEE Micro, Vol. 23(No. 4), 21 - 30. doi:10.1109/MM.2003.1225960
Vermeulen , B., Goossens , K., & Umrani , S. (2008). Debugging Distributed-Shared-Memory
Communication at Multiple Granularities in Networks on Chip. Proceedings of the Second
ACM/IEEE International Symposium on Networks-on-Chip (pg. 3-12). IEEE.
Wilhelm, R., Engblom, J., Ermedahl, A., Holsti, N., Thesing, S., Whalley, D., & Bernat, G. (2008).
The Worst-Case Execution Time Problem – Overview of Methods and Survey of Tools.
ACM Transactions on Embedded Computing Systems, Vol. 7(No. 3), 36 - 53.
doi:10.1145/1347375.1347389
Williams, R. (2006). Real-Time Systems Development. Oxford: Elsevier.
Wolf, W. (2003). A decade of hardware/software codesign. IEEE Computer, Vol. 36(No. 4), 38-43.
doi:10.1109/MC.2003.1193227
Wolf, W. (2007). High-Performance Embedded Computing - Architectures, Applications and
Methodologies. San Francisco: Morgan Kaufmann.
Xilinx Inc. (2011). Fast Simplex Link. Preluat de pe
http://www.xilinx.com/support/documentation/ip_documentation/fsl_v20.pdf
Xilinx Inc. (2011). Local Memory Bus. Preluat de pe
http://www.xilinx.com/support/documentation/ipembedprocess_memoryinterface_lmb.htm
Xilinx Inc. (2011). MicroBlaze Soft Processor Core. Preluat de pe
http://www.xilinx.com/tools/microblaze.htm
Xilinx Inc. (2011). PicoBlaze 8-bit Embedded Microcontroller User Guide. Preluat de pe
http://www.xilinx.com/support/documentation/ip_documentation/ug129.pdf
Xilinx Inc. (2011). Processor Local Bus. Preluat de pe
http://www.xilinx.com/support/documentation/ip_documentation/ds531.pdf
Xilinx Inc. (2011). Zynq-7000 Extensible Processing Platform. Preluat de pe
http://www.xilinx.com/products/silicon-devices/epp/zynq-7000/index.htm
Zhang, T., Zhuang, X., & Pande, S. (2005). Anomalous Path Detection with Hardware Support.
Proceedings of the 2005 international conference on Compilers, architectures and synthesis
for embedded systems (pg. 43 - 54). New York: ACM. doi:10.1145/1086297.1086305