Embed Size (px)
Citation preview
Control Difuso
Control con Lógica Difusa
Control Difuso
Dr. Fernando Ornelas Tellez
Universidad Michoacana de San Nicolás de HidalgoFacultad de Ingeniería Eléctrica
Morelia, Michoacan
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 1/26

Control Difuso
Bibliografía
1 D. Driankov et al. An introduction to Fuzzy Control (2nd Ed.),Springer, 1996.
2 G. Chen. Introduction to Fuzzy Sets, Fuzzy Logic and FuzzyControl Systems, CRC Press
3 K. Tanaka et al. Fuzzy Control Systems Design and Analysis,John Willey and Sons.
4 Fuzzy Controllers, Leonid Reznik, Newnes, 1997.
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 2/26

Control Difuso
Contenido
1 Control Difuso
Estructura de un Controlador con Lógica Difusa
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 3/26

Control Difuso Estructura de un Controlador con Lógica Difusa
Outline
1 Control Difuso
Estructura de un Controlador con Lógica Difusa
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 4/26
Control Difuso Estructura de un Controlador con Lógica Difusa
¿Porqué control difuso?
En seguida se presentan algunos justificantes a este tipo de control
Permite trasladar o capturar conocimiento vago/impreciso deexpertosSimple y fácil de implementarPuede no requerir del modelo matemático del sistema acontrolarComportamiento suave de los controladoresControladores robustos
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 5/26
Control Difuso Estructura de un Controlador con Lógica Difusa
¿Cómo diseñar control sin un modelo matemático?
Ebrahim Mamdani demostró1 que es posible tal diseño al introdu-cir el primer controlador difuso en 1975, aplicado al control de unamaquina de vapor en combinación con una caldera, el cual en controlclásico es considerado como un sistema altamente no lineal y difícilde controlar.
Para modelar se emplea un Sistema de Inferencia Difusa (FIS, delInglés Fuzzy Inference System), el cual se basa en reglas del tipoIF-THEN y Razonamiento Difuso.
Al FIS también se le conoce como sistema basado en reglas difusas,sistema experto difuso, modelo difuso, o simplemente sistema difuso.
1Procyk T.J. and Mamdani E.H. “A Linguistic Self-organising ProcessController”, Automatica, 15(1), 1979, pp. 15–30.
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 6/26

Control Difuso Estructura de un Controlador con Lógica Difusa
Sistema de Inferencia Difusa
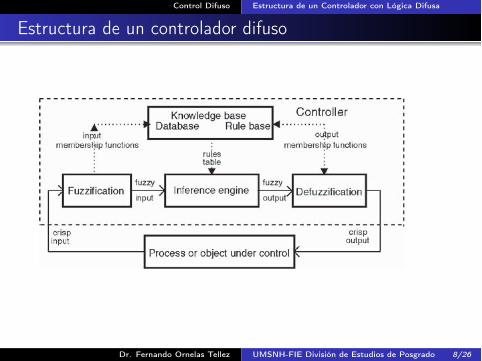
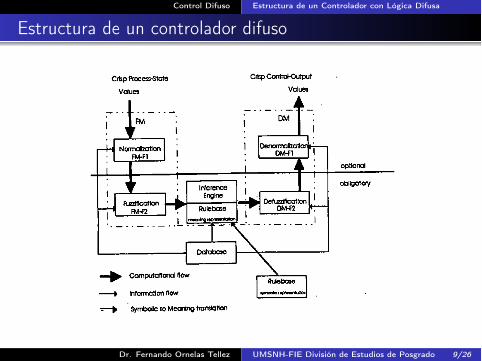
La estructura básica de un FIS consiste de tres componentes:
Una base de reglas (en general, del tipo IF-THEN)Una base de datos, la cual define las MF’s usadas en las reglasdifusasUn mecanismo de razonamiento, el cual a partir de reglas yhechos, permite obtener una salida razonable o conclusión.
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 7/26
Control Difuso Estructura de un Controlador con Lógica Difusa
Estructura de un controlador difuso
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 8/26
Control Difuso Estructura de un Controlador con Lógica Difusa
Estructura de un controlador difuso
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 9/26
Control Difuso Estructura de un Controlador con Lógica Difusa
Fusificación
El modulo de fusificación (FM) realiza las siguientes funciones:
FM-F1: realiza una transformación de escala (es decir, unanormalización de entrada), que asigna los valores físicos de lasvariables de estado del proceso a un universo de discursonormalizado (dominio normalizado).FM-F2: convierte el valor actual de una variable de estado delproceso (valor numérico proveniente, por ejemplo, de unsensor) a un conjunto difuso, esto con el fin de hacerlacompatible con la representación de conjuntos difusos, tal queel mecanismo de inferencia pueda procesar.
Estos valores difusos son los niveles de pertenencia de los valores deentrada a los diferentes conjuntos difusos en los cuales se ha divididoel universo de discurso.
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 10/26
Control Difuso Estructura de un Controlador con Lógica Difusa
Base de conocimiento
La base de conocimiento de un controlador difuso consiste en unabase de datos y una base de reglas.
La función básica de la base de datos es proporcionar la informaciónnecesaria para el correcto funcionamiento del módulo de fusificación,la base de reglas, y el módulo de defusificación. Esta informaciónincluye: MF‘s, dominios físicos y difusos, factores de escala, etc.
La base de reglas son la manera que tiene el sistema difuso de guardarel conocimiento lingüístico que le permite resolver el problema parael cual ha sido diseñado.
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 11/26

Control Difuso Estructura de un Controlador con Lógica Difusa
Base de conocimiento
La función básica de la base de reglas es representar, de maneraestructurada, la acción de control de un operador de proceso expe-rimentado y/o ingeniero de control, con la forma de un conjunto dereglas de producción, tales como
IF (estado del proceso) THEN (salida de control)
La parte del IF de tal regla es llamada regla antecedente y es unadescripción de un estado del proceso en términos de una combinaciónlógica de proposiciones difusas elementales (x es LX ), donde x esuna variable lingüística y LX es su valor lingüístico describiendo unapropiedad de x .
La parte THEN de la regla es llamada regla consecuente y es unadescripción de la salida de control en términos de la combinaciónlógica de proposiciones difusas.
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 12/26
Control Difuso Estructura de un Controlador con Lógica Difusa
Base de conocimiento
Los parámetros de diseño que se involucran en la construcción de labase de reglas incluye:
elección de las variables de estado del proceso y las variablesde salida de control;elección de los contenidos de las reglas de antecedente yconsecuente;elección de conjuntos (rangos de valores lingüísticos) para lavariable de estado del proceso y la variable de salida de control;derivación del conjunto de reglas.
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 13/26
Control Difuso Estructura de un Controlador con Lógica Difusa
Maquina de Inferencia
A partir de los diferentes niveles de pertenencia, obtenidos del fusifi-cador, estos deben ser procesados para generar una salida difusa.
La tarea del sistema de inferencia es tomar los niveles de pertenenciay en combinación con la base de reglas, entonces generar la salidadel sistema difuso.
La salida puede ser tanto un conjunto borroso como un valor numé-rico, según se requiera por la aplicación.
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 14/26
Control Difuso Estructura de un Controlador con Lógica Difusa
Maquina de Inferencia
La función básica de la maquina de inferencia es calcular el valortotal de la variable de salida de control a partir de la contribuciónindividual de cada regla en la base de reglas.
La maquina de inferencia puede verse matemáticamente como unesquema de interpolación no lineal, ya que permite la fusión de lainformación de múltiples reglas en una conclusión única.
Esta conclusión se obtiene a partir de la combinación de los conse-cuentes de las reglas del sistema, ponderadas según una función delgrado de cumplimiento de cada una de ellas.
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 15/26
Control Difuso Estructura de un Controlador con Lógica Difusa
Defusificación
La salida que genera el mecanismo de inferencia es una salida difu-sa, misma que no puede ser interpretada por un elemento externo(por ejemplo un actuador) que sólo manipula información según sunaturaleza (voltaje, flujo, etc.).
Para lograr que la salida del sistema difuso pueda ser interpretada,se debe convertir la salida difusa de los mecanismos de inferencia avalores numéricos; este proceso lo realiza el defusificador.
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 16/26
Control Difuso Estructura de un Controlador con Lógica Difusa
Defusificación
Las funciones del modulo defusificador (MD) son:
MD-F2: realizar el proceso de defusificación, que convierte el conjun-to de valores difusos de salida del controlador a un valor interpretablepor los elementos físicos de la planta o proceso a controlar.
MD-F1: realizar una desnormalización, la cual mapea el valor de lasalida de control a su dominio físico. Este modulo no es necesario enel caso de no haber utilizado un modulo para normalizar los datos ala entrada.
Para la defusificación existen varias opciones como el Centro de Gra-vedad, Centros Promediados, entre otros.
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 17/26
Control Difuso Estructura de un Controlador con Lógica Difusa
Procedimientos de Defusificación
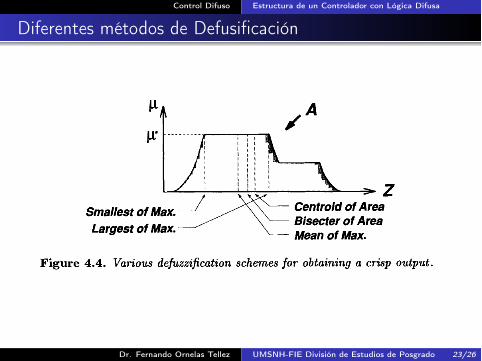
Métodos usuales de Defusificación [1], pp. 132, Jang., pp. 77:
Centro de área/ Defusificación de gravedadCentro de sumasAlturaMínimo del máximoMedio del máximo
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 18/26
Control Difuso Estructura de un Controlador con Lógica Difusa
Defusificación: Centro de área
Conocido como centro de gravedad y es uno de los más utilizado.
Para el caso discreto:
x
⇤ =Â`i=1 xi ·µ (xi )
Â`i=1 µ (xi )
=Â`i=1 xi ·m«axk µk (xi )
Â`i=1 m«axk µk (xi )
Para el caso continuo:
x
⇤ =
RU x ·µ (x)duRU µ (x)du
=
RU x ·m«axk µk (x)duRU m«axk µk (x)du
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 19/26
Control Difuso Estructura de un Controlador con Lógica Difusa
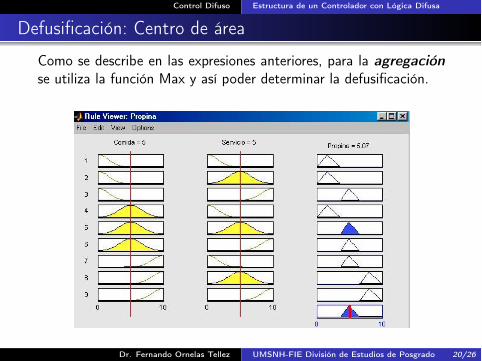
Defusificación: Centro de área
Como se describe en las expresiones anteriores, para la agregaciónse utiliza la función Max y así poder determinar la defusificación.
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 20/26
Control Difuso Estructura de un Controlador con Lógica Difusa
Defusificación: Centro de sumas
Conocido como centro de gravedad y es uno de los más utilizado.
Para el caso discreto:
x
⇤ =Â`i=1 xi ·Ân
k=1 µk (xi )
Â`i=1 Ân
k=1 µk (xi )
Para el caso continuo:
x
⇤ =
RU x ·Ân
k=1 µk (x)duRU Ân
k=1 µk (x)du.
Note que a diferencia que el centro de gravedad, este método realizala agregación como la suma de los diferentes conjuntos difusos enlugar de la función Máx.
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 21/26
Control Difuso Estructura de un Controlador con Lógica Difusa
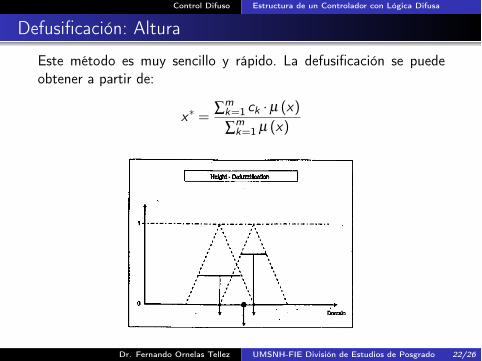
Defusificación: Altura
Este método es muy sencillo y rápido. La defusificación se puedeobtener a partir de:
x
⇤ =Âmk=1 ck ·µ (x)
Âmk=1 µ (x)
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 22/26
Control Difuso Estructura de un Controlador con Lógica Difusa
Diferentes métodos de Defusificación
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 23/26
Control Difuso Estructura de un Controlador con Lógica Difusa
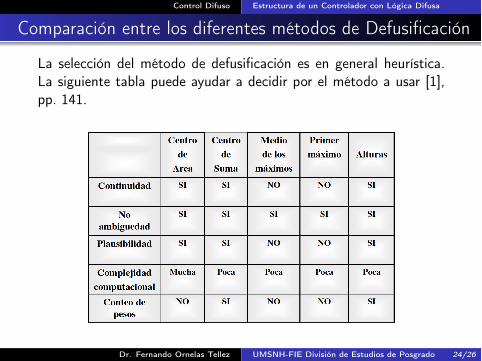
Comparación entre los diferentes métodos de Defusificación
La selección del método de defusificación es en general heurística.La siguiente tabla puede ayudar a decidir por el método a usar [1],pp. 141.
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 24/26

Control Difuso Estructura de un Controlador con Lógica Difusa
Agregación
La mayoría de los sistemas basados en reglas dependen de más deuna regla.
Al proceso de obtener una conclusión final a partir de consecuentesindividuales (una por regla), se le conoce como agregación.
Para la agregación, se puede utilizar la conectiva AND cuando serequiere que un sistema de reglas sean satisfechas conjuntamente.
Se usa la conectiva OR cuando se requiere que al menos una de lasreglas sea satisfecha.
Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 25/26
Appendix Para mayor información
[allowframebreaks]Para mayor información
D. Driankov et al.An introduction to Fuzzy Control (2nd Ed.)Springer, 1996
G. ChenIntroduction to Fuzzy Sets, Fuzzy Logic and Fuzzy ControlSystemsCRC Press.K. Tanaka et al.Fuzzy Control Systems Design and AnalysisJohn Willey and Sons
Fuzzy Logic ToolboxUsers GuideThe Math WorksS. Someone.On this and that.Journal on This and That. 2(1):50–100, 2000.Dr. Fernando Ornelas Tellez UMSNH-FIE División de Estudios de Posgrado 26/26





























