-
8/3/2019 Control System Modeling
1/24
UNIT 1
CONTROL SYSTEM MODELING
1. Introduction
Systems are sets of components, physical or otherwise, which
are
connected in such a manner as to form and act as entire units.
Control is the
effort to make systems act as desired. A process is the action
of a system oralternatively, a system in action.
Humans have created control systems as technical innovations
to
enhance the quality and comfort of their lives. Human engineered
control
systems are part of automation, which is a feature of our modern
life. They are
applied in several aspects of our daily life- in heating and air
conditioning tocontrol our living environment and in many of our
household appliances. They
significantly relieve us from the burden of operation of complex
systems and
processes and enable us to achieve control with desired
precision. Control
systems enable accurate positioning and control of machine tools
in metal
cutting operations and automate manufacturing processes. They
automaticallyguide and control space vehicles, aircraft, large sea
going vessels, and high-
speed ground transportation systems. Modern automation of a
plant involves
components such as sensors, instruments, computers and
application of
techniques of data processing and control. The principles and
techniques ofautomatic control may be applied in a wide variety of
systems in order toenhance the quality of their performance.
Control systems are not human inventions; they have naturally
evolvedin the earths living system. The action of automatic control
regulates the
conditions necessary for life in almost all living things. They
possess sensing
and controlling systems and counter disturbances. An automatic
temperature
control system, for example, makes it possible to maintain the
temperature of
the human body constant at the right value despite varying
ambient conditions.
The human body is a very sophisticated biochemical processing
plant in which
the consumed food is processed and glands automatically release
the required
quantities of chemical substances as and when necessary in the
process. The
stability of the human body and its ability to move as desired
are due to some
very effective motion control systems. A bird in flight, a fish
swimming inwater or an animal on the run- all are under the
influence of some very
efficient control systems that have evolved in them.
The field of automatic control is very well developed. The
established
techniques in this field can be applied to the control of a wide
range of systems- engineering systems such as machines and complex
plants, natural systems
-
8/3/2019 Control System Modeling
2/24
such as biological and ecological systems, and non-physical
systems such as
economic and sociological systems following the understanding of
thesimilarity of the underlying problems.
Understanding a system for its properties is prerequisite to the
creationof a control system for it. Before attempting to control a
system, it is essentialto know how it generally behaves and
responds to external stimuli. Such an
understanding is possible with the help of a model. The process
of developinga model is known as modeling.
Physical systems are modeled by applying the phenomenological
laws
that govern their behavior. For example, mechanical systems are
described by
Newtons laws and electrical systems by Ohms, Faradays and Lenzs
laws.These laws form the basis for the constitutive properties of
the elements in asystem.
Consider an automobile's cruise control, which is a device
designed to
maintain a constant vehicle speed; the desiredor reference
speed, provided bythe driver. The system in this case is the
vehicle. The system output is the
vehicle speed, and the control variable is the engine's throttle
position whichinfluences engine torque output.
OPEN LOOP & CLOSED LOOP:
A primitive way to implement cruise control is simply to lock
the
throttle position when the driver engages cruise control.
However, on
mountain terrain, the vehicle will slow down going uphill and
accelerate going
downhill. In fact, any parameter different than what was assumed
at designtime will translate into a proportional error in the
output velocity, including
exact mass of the vehicle, wind resistance, and tire pressure.
This type of
controller is called an open-loop controller because there is no
direct
connection between the output of the system (the vehicle's
speed) and theactual conditions encountered; that is to say, the
system does not and can not
compensate for unexpected forces.
In a closed-loop control system, a sensor monitors the output
(the
vehicle's speed) and feeds the data to a computer which
continuously adjusts
the control input (the throttle) as necessary to keep the
control error to a
minimum (that is, to maintain the desired speed). Feedback on
how the system
is actually performing allows the controller (vehicle's on board
computer) to
dynamically compensate for disturbances to the system, such as
changes inslope of the ground or wind speed. An ideal feedback
control system cancels
http://en.wikipedia.org/wiki/Cruise_controlhttp://en.wikipedia.org/wiki/Throttlehttp://en.wikipedia.org/wiki/Torquehttp://en.wikipedia.org/wiki/Open-loop_controllerhttp://en.wikipedia.org/wiki/Open-loop_controllerhttp://en.wikipedia.org/wiki/Torquehttp://en.wikipedia.org/wiki/Throttlehttp://en.wikipedia.org/wiki/Cruise_control
-
8/3/2019 Control System Modeling
3/24
out all errors, effectively mitigating the effects of any forces
that may or may
not arise during operation and producing a response in the
system thatperfectly matches the user's wishes.
BLOCK DIAGRAM REDUCTION TECHNIQUE
Rule:1
Rule: 2 (Associative and Commutative Properties)
Rule: 3 (Distributive Property)
Rule: 4 (Blocks in Parallel)
-
8/3/2019 Control System Modeling
4/24
Rule: 5 (Positive Feedback Loop)
Rule: 6 (Negative Feedback loop)
-
8/3/2019 Control System Modeling
5/24
Equivalent: 1
-
8/3/2019 Control System Modeling
6/24
Equivalent: 2
Examples of Block Diagram Reduction
SIGNAL-FLOW GRAPH
A signal-flow graph (SFG) is a special type of block
diagram[1]
and
directed graphconstrained by rigid mathematical rules, that is a
graphical
means of showing the relations among the variables of a set of
linear algebraic
relations. Nodes represent variables, and are joined by branches
that haveassigned directions (indicated by arrows) and gains. A
signal can transmit only
in the direction of the arrow.
http://www.che.iitm.ac.in/~ch04d017/sp/ctrl/BD-Quest.htmhttp://www.che.iitm.ac.in/~ch04d017/sp/ctrl/BD-Quest.htmhttp://en.wikipedia.org/wiki/Block_diagramhttp://en.wikipedia.org/wiki/Block_diagramhttp://en.wikipedia.org/wiki/Directed_graphhttp://en.wikipedia.org/wiki/Directed_graphhttp://en.wikipedia.org/wiki/Block_diagramhttp://en.wikipedia.org/wiki/Block_diagramhttp://en.wikipedia.org/wiki/Block_diagramhttp://www.che.iitm.ac.in/~ch04d017/sp/ctrl/BD-Quest.htm
-
8/3/2019 Control System Modeling
7/24
UNIT-2
TIME RESPONSE ANALYSIS
TIME-DOMAIN RESPONSE ANALYSISThe time-domain approach is a
unified method for analyzing and designingsystems modeled by either
modern or classical approach. Time-domain
response analysis functions below can be used to study the
output behavior of
a linear time-invariant system driven by system inputs and
initial states.
The step or impulse response plots the system response with
respect to time
when the system input is a step or impulse function,
respectively. The initial
response plots the system response to the initial state x0 with
zero-input. The
simulation response plots the system response to any input and
initial statespecified by the user. The initial state of zero is
assumed by default.
Function Description
Step response
Plot step response of a system in time domain.
Impulse response
Plot impulse response of a system in time
domain.
Initial response
Plot time domain initial response of a system
represented in state space.
Simulation response Simulate system response to an arbitrary
input.
STEADY STATE ERROR
Control systems are used to control some physical variable. That
variable
may be a temperature somewhere, the attitude of an aircraft or a
frequency in a
communication system. Whatever the variable, it is important to
control thevariable accurately.
If you are designing a control system, how accurately the
system
performs is important. If it is desired to have the variable
under control take
on a particular value, you will want the variable to get as
close to the desired
value as possible. Certainly, you will want to measure how
accurately you cancontrol the variable. Beyond that you will want
to be able to predict howaccurately you can control the
variable.
To be able to measure and predict accuracy in a control system,
astandard measure of performance is widely used. That measure
of
http://www.softintegration.com/chhtml/toolkit/control/step.htmlhttp://www.softintegration.com/chhtml/toolkit/control/impulse.htmlhttp://www.softintegration.com/chhtml/toolkit/control/initial.htmlhttp://www.softintegration.com/chhtml/toolkit/control/lsim.htmlhttp://www.softintegration.com/chhtml/toolkit/control/lsim.htmlhttp://www.softintegration.com/chhtml/toolkit/control/lsim.htmlhttp://www.softintegration.com/chhtml/toolkit/control/initial.htmlhttp://www.softintegration.com/chhtml/toolkit/control/impulse.htmlhttp://www.softintegration.com/chhtml/toolkit/control/step.html
-
8/3/2019 Control System Modeling
8/24
performance is steady state error - SSE - and steady state error
is a concept thatassumes the following:
The system under test is stimulated with some standard
input.Typically, the test input is a step function of time, but it
can also be aramp or other polynomial kinds of inputs.
The system comes to a steady state, and the difference between
the inputand the output is measured.
The difference between the input - the desired response - and
the output- the actual response is referred to as the error.
Goals For This Lesson
Given our statements above, it should be clear what you are
about in thislesson. Here are your goals.
Given a linear feedback control system,
Be able to compute the SSE for standard inputs, particularly
step input
signals.Be able to compute the gain that will produce a
prescribed level of SSE in
the system.
Be able to specify the SSE in a system with integral
control.
In this lesson, we will examine steady state error - SSE - in
closed loopcontrol systems. The closed loop system we will examine
is shown below.
The system to be controlled has a transfer function G(s). There
is a sensor with a transfer function Ks. There is a controller with
a transfer function Kp(s) - which may be a
constant gain.
What Is SSE?
We need a precise definition of SSE if we are going to be able
to predict a
value for SSE in a closed loop control system. Next, we'll look
at a closedloop system and determine precisely what is meant by
SSE.
In this lesson, we will examine steady state error - SSE - in
closed loopcontrol systems. The closed loop system we will examine
is shown below.
-
8/3/2019 Control System Modeling
9/24
The system to be controlled has a transfer function G(s). There
is a sensor with a transfer function Ks. There is a controller with
a transfer function Kp(s).
o A controller like this, where the control effort to the plant
isproportional to the error, is called a proportional
controller.
In our system, we note the following:
The input is often the desired output. In other words, the input
is whatwe want the output to be. If the input is a step, then we
want the outputto settle out to that value.
The output is measured with a sensor. Often the gain of the
sensor isone. That is especially true in computer controlled
systems where the
output value - an analog signal - is converted into a
digitalrepresentation, and the processing - to generate the error,
E(s) - takesplace inside a computer.
The signal, E(s), is referred to as the error signal.
The error signal is the difference between the desired input and
themeasured input.
The error signal is a measure of how well the system is
performing atany instant. When the error signal is large, the
measured output doesnot match the desired output very well.
A step input is often used as a test input for several
reasons.
A step input is really a request for the output to change to a
new,constant value.
If the system is well behaved, the output will settle out to a
constant,steady state value.
The difference between the measured constant output and the
inputconstitutes a steady state error, or SSE.
It helps to get a feel for how things go. So, below we'll
examine a system
that has a step input and a steady state error. That system is
the same block
diagram we considered above.
-
8/3/2019 Control System Modeling
10/24
For the example system, the controlled system - often referred
to as the plant -is a first order system with a transfer
function:
G(s) = Gdc/(st + 1)
We will consider a system with the following parameters.
Gdc = 1 t = 1 Ks = 1. Kp can be set to various values in the
range of 0 to 10, The input is always 1.
Here is a simulation you can run to check how this works. In
this
simulation, the system being controlled (the plant) and the
sensor have theparameters shwon above. You can adjust the gain up
or down by 5% using the
"arrow" buttons at bottom right. You can also enter your own
gain in the text
box, then click the red button to see the response for the gain
you enter. Theactual open loop gain is shown in the text box above
the red button.
UNIT3
FREQUENCY RESPONSE ANALYSIS
BODE PLOT
A Bode plot is a graph of the logarithm of the transfer function
of a linear,
time-invariant system versus frequency, plotted with a
log-frequency axis, to
show the system's frequency response. It is usually a
combination of a Bode
magnitude plot (usually expressed as dB ofgain) and a Bode phase
plot (thephase is the imaginary part of the complex logarithm of
the complex transferfunction).
The magnitude axis of the Bode plot is usually expressed as
decibels ofpower,
that is by the 20 log rule: 20 times the common logarithm of the
amplitudegain. With the magnitude gain being logarithmic, Bode
plots make
http://en.wikipedia.org/wiki/Plot_(graphics)http://en.wikipedia.org/wiki/Logarithmhttp://en.wikipedia.org/wiki/Transfer_functionhttp://en.wikipedia.org/wiki/LTI_system_theoryhttp://en.wikipedia.org/wiki/LTI_system_theoryhttp://en.wikipedia.org/wiki/Frequencyhttp://en.wikipedia.org/wiki/Frequency_responsehttp://en.wikipedia.org/wiki/Decibelhttp://en.wikipedia.org/wiki/Gainhttp://en.wikipedia.org/wiki/Phase_(waves)http://en.wikipedia.org/wiki/Imaginary_parthttp://en.wikipedia.org/wiki/Complex_logarithmhttp://en.wikipedia.org/wiki/Decibelhttp://en.wikipedia.org/wiki/Power_(physics)http://en.wikipedia.org/wiki/20_log_rulehttp://en.wikipedia.org/wiki/20_log_rulehttp://en.wikipedia.org/wiki/Power_(physics)http://en.wikipedia.org/wiki/Decibelhttp://en.wikipedia.org/wiki/Complex_logarithmhttp://en.wikipedia.org/wiki/Imaginary_parthttp://en.wikipedia.org/wiki/Phase_(waves)http://en.wikipedia.org/wiki/Gainhttp://en.wikipedia.org/wiki/Decibelhttp://en.wikipedia.org/wiki/Frequency_responsehttp://en.wikipedia.org/wiki/Frequencyhttp://en.wikipedia.org/wiki/LTI_system_theoryhttp://en.wikipedia.org/wiki/LTI_system_theoryhttp://en.wikipedia.org/wiki/LTI_system_theoryhttp://en.wikipedia.org/wiki/Transfer_functionhttp://en.wikipedia.org/wiki/Logarithmhttp://en.wikipedia.org/wiki/Plot_(graphics)
-
8/3/2019 Control System Modeling
11/24
multiplication of magnitudes a simple matter of adding distances
on the graph(in decibels), since
A Bode phase plot is a graph of phase versus frequency, also
plotted on a log-
frequency axis, usually used in conjunction with the magnitude
plot, toevaluate how much a signal will be phase-shifted. For
example a signaldescribed by:Asin(t) may be attenuated but also
phase-shifted. If the system
attenuates it by a factorxand phase shifts it by the signal out
of the system
will be (A/x) sin(t). The phase shift is generally a function
of
frequency.
Phase can also be added directly from the graphical values, a
fact that is
mathematically clear when phase is seen as the imaginary part of
the complexlogarithm of a complex gain.
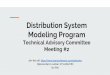
In Figure 1(a), the Bode plots are shown for the one-pole
highpass filterfunction:
wherefis the frequency in Hz, and f1 is the pole position in
Hz,f1 = 100 Hz in
the figure. Using the rules for complex numbers, the magnitude
of thisfunction is
while the phase is:
Care must be taken that the inverse tangent is set up to return
degrees, not
radians. On the Bode magnitude plot, decibels are used, and the
plottedmagnitude is:
In Figure 1(b), the Bode plots are shown for the one-pole
lowpass filter
function:
Also shown in Figure 1(a) and 1(b) are the straight-line
approximations to theBode plots that are used in hand analysis, and
described later.
The magnitude and phase Bode plots can seldom be changed
independently of
each otherchanging the amplitude response of the system will
most likelychange the phase characteristics and vice versa. For
minimum-phase systems
the phase and amplitude characteristics can be obtained from
each other withthe use of the Hilbert transform.
If the transfer function is a rational function with real poles
and zeros, then the
Bode plot can be approximated with straight lines. These
asymptotic
http://en.wikipedia.org/wiki/Phase_(waves)http://en.wikipedia.org/wiki/Highpass_filterhttp://en.wikipedia.org/wiki/Complex_numberhttp://en.wikipedia.org/wiki/Lowpass_filterhttp://en.wikipedia.org/wiki/Minimum-phasehttp://en.wikipedia.org/wiki/Hilbert_transformhttp://en.wikipedia.org/wiki/Rational_functionhttp://en.wikipedia.org/wiki/Rational_functionhttp://en.wikipedia.org/wiki/Hilbert_transformhttp://en.wikipedia.org/wiki/Minimum-phasehttp://en.wikipedia.org/wiki/Lowpass_filterhttp://en.wikipedia.org/wiki/Complex_numberhttp://en.wikipedia.org/wiki/Highpass_filterhttp://en.wikipedia.org/wiki/Phase_(waves)
-
8/3/2019 Control System Modeling
12/24
approximations are called straight line Bode plots or
uncorrected Bode plots
and are useful because they can be drawn by hand following a few
simplerules. Simple plots can even be predicted without drawing
them.
The approximation can be taken further by correcting the value
at each cutofffrequency. The plot is then called a corrected Bode
plot.
POLAR PLOT
The polar plot is created using the Radar chart.
NYQUIST PLOT
Polar graphsThere are a number of polar graph options for
studying control systems
including the nyquist, inverse polar plot and the nichols plot.
The nyquist
open loop polar plot indicates the degree of stability, and the
adjustments
required and provides stability information for systems
containing timedelays. Polar plots are not used exclusively
because,without powerful
computing facilities, they can be difficult to generate at a
detailed level and
they do not directly yield frequency values.
The Nyquist plot is obtained by simply plotting a locus of
imaginary(G(j ))
versus Real(G(j )) at the full range of frequencies from ( - to
+ ) It isvery easy to produce nyquist plots by hand or by using
proprietary software
-
8/3/2019 Control System Modeling
13/24
packages such as Matlab. Links below show how bode and nyquist
plots can
be produced using Excel and using Mathcad. The plots below have
been
produced in minutes using Mathcad..
The nyquist plot fundamentals are shown below....
Velocity Feedback control
Basic Rules for constructing Nyquist plots
In control systems a transfer function to be assessed is often
of the form
This transfer function is modified for frequency response
analysis by replacingthe s with j
-
8/3/2019 Control System Modeling
14/24
Assuming the function is proper and n > m..he Nyquist plot
will have the
following characteristics. Crude plots to be may be produced
relatively easily
using these characteristics.
1.
Asymptotic behavior.. For n - m > 1, the Nyquist plot
approaches theorigin at an asymptotic angle of -(n-m) /2...
2. Assuming G(s) = K(s)/s k. For k poles at zero, the Nyquist
plot comes infrom infinity at an angle of -(n-m) /2
3. In a system with no OL zeros, the plot of G(j) will
decreasemonotonically as rises above the level of the largest
imaginary part ofthe poles; This will also be true for large enough
even in the presence
of zeros.(Ref plot 1 below).
4. The plot will cross the imaginary axis when Real G(j) =0 and
willcross the real axis when Imaginary G(j) = 0, ( for crossing of
thenegative real axis use Arg- G(j)= )
Relative stability assessments Using the Nyquist Plot
As identified in the page on frequency response Frequency
response The
nyquist plots are based on using open loop performance to test
for closed loop
stability. The system will be unstable if the locus has unity
value at a phase
crossover of 180o
( ).
Two relative stability indicators "Gain Margin" and "Phase
Margin" may be
determined from the suitable Nyquist Plots. The degree of gain
margin is
indicated as the amount the gain is less than unity when the
plot crosses the
180o
axis (Phase crossover). The phase margin is the angle the phase
is less
than 180o
when the gain is unity. The values are generally identified by
use of
Bode plots
The phase margin is clearly illustrated below
http://www.roymech.co.uk/Related/Control/Frequency_Response.htmlhttp://www.roymech.co.uk/Related/Control/Frequency_Response.html
-
8/3/2019 Control System Modeling
15/24
NyquistStabilityCriterion:In the nyquist plots below the area
covered to the right of the locus(shaded) is
the Right Hand Plane (RHP)
A closed loop control system is absolutely stable if the roots
of thecharacteristic equation have negative real parts. This means
the poles of the
closed loop transfer function, or the zeros of the denominatior
( 1 + GH(s)) ofthe closed loop tranfer function, must lie in the
(LHP). The nyquist stability
criterion establishes the number of zeros of (1 + GH(s) in the
RHP directly
from the Nyquist stability plot of GH(s) as indicated below.
The closed loop control system whose open loop transfer function
is GH(s) is
stable only if..
N = -Po 0
-
8/3/2019 Control System Modeling
16/24
where
1) P o = the number of G(s) poles in the RHP 0
2) N = total number of CW encirclements of the (-1,0) in the
G(s) plane.
If N > 0 the number of zeros (Z o) in the RHP is determined
by Z o = N + P o
If N 0 the (-1,0) point is not enclosed by the nyquist plot.If N
and P 0 then the system is absolutely stable only if N = 0. That is
if andonly if the (-1,0) point does not lie in the shaded
region..
Considering the LH plot above of 1/s(s+1). The (-1,0) point is
not in the RHP
therefore N 0 (N= 1). The poles of GH are at s= 0 and s = +1 .
S=
+1 is in the RHP and therefore P o = 1.N - P o Indicating that
this system is unstable..
There are Z o = N + P o zeros of 1+GH in the RHP.
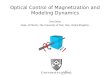
Nyquist Plots A number of typical nyquist plots are shown below
to illustrate
the various shapes.
Plot 1..... 1 /(s + 2)
1 /(s + 2)
-
8/3/2019 Control System Modeling
17/24
Note that G(i0) = 0.5 and as increases to the plot approaches
zero along
the negative locus.G(j) moves from 0 to 0.5 as - to 0
G(j ) = 0
The asymptotic angle approaching 0 is = -90o
and
Plot 2.....1 /(s2
+ 2s + 2)
1 /(s2
+ 2s + 2)
The zero-frequency behaviour is:G(j0) =0.5
G(j ) = 0The asymptotic angle is = -180
o
Plot 3.....s(s+1) /(s3
+ 5.s2
+3.s + 4 )
s(s+1) /(s3
+ 5.s2
+3.s +4 )
Plot 4.....(s+1) /[(s+2)(s+3)]
-
8/3/2019 Control System Modeling
18/24
((s+1) /[(s+2)(s+3)]
Plot 5.....1 /s(s-1).. an unstable regime
UNIT 4
STABILITY ANALYSIS
Routh-Hurwitz Criterion
The RouthHurwitz stability criterion is a necessary (and
frequently
sufficient) method to establish the stability of a single-input,
single-output(SISO), linear time invariant (LTI) control system.
More generally, given a
polynomial, some calculations using only the coefficients of
that polynomial
can lead to the conclusion that it is not stable. For the
discrete case, see theJury test equivalent.
The criterion establishes a systematic way to show that the
linearizedequations of motion of a system have only stable
solutions exp(pt), that is
http://en.wikipedia.org/wiki/Stable_polynomialhttp://en.wikipedia.org/wiki/Linear_functionhttp://en.wikipedia.org/wiki/Time_invarianthttp://en.wikipedia.org/wiki/Control_systemhttp://en.wikipedia.org/wiki/Polynomialhttp://en.wikipedia.org/wiki/Jury_stability_criterionhttp://en.wikipedia.org/wiki/Equations_of_motionhttp://en.wikipedia.org/wiki/Equations_of_motionhttp://en.wikipedia.org/wiki/Jury_stability_criterionhttp://en.wikipedia.org/wiki/Polynomialhttp://en.wikipedia.org/wiki/Control_systemhttp://en.wikipedia.org/wiki/Time_invarianthttp://en.wikipedia.org/wiki/Linear_functionhttp://en.wikipedia.org/wiki/Stable_polynomial
-
8/3/2019 Control System Modeling
19/24
where all p have negative real parts. It can be performed using
eitherpolynomial divisions or determinant calculus.
Using Euclid's algorithm
The criterion is related to RouthHurwitz theorem. Indeed, from
the
statement of that theorem, we have where:
p is the number of roots of the polynomial f(z) located in the
left half-plane;
q is the number of roots of the polynomial f(z) located in the
right half-plane (let us remind ourselves that fis supposed to have
no roots lying
on the imaginary line);
w(x) is the number of variations of the generalized Sturm chain
obtainedfrom P0(y) and P1(y) (by successive Euclidean divisions)
where f(iy) =P0(y) + iP1(y) for a realy.
By the fundamental theorem of algebra, each polynomial of degree
n must
have n roots in the complex plane (i.e., for anfwith no roots on
the imaginary
line, p+q=n). Thus, we have the condition that f is a (Hurwitz)
stablepolynomial if and only ifp-q=n (the proofis given below).
Using the Routh
Hurwitz theorem, we can replace the condition on p and q by a
condition on
the generalized Sturm chain, which will give in turn a condition
on the
coefficients off.
Using matrices
Letf(z) be a complex polynomial. The process is as follows:
1. Compute the polynomials P0(y) and P1(y) such thatf(iy) =
P0(y) + iP1(y)wherey is a real number.
2. Compute the Sylvester matrix associated to P0(y) and P1(y).3.
Rearrange each row in such a way that an odd row and the
following
one have the same number of leading zeros.4. Compute each
principal minor of that matrix.5. If at least one of the minors is
negative (or zero), then the polynomial f
is not stable.
ROOT LOCUS TECHNIQUES:
Introduction
A root loci plot is simply a plot of the s zero values and the s
poles on a
graph with real and imaginary coordinates. The root locus is a
curve of the
http://en.wikipedia.org/wiki/Negative_and_positive_numbershttp://en.wikipedia.org/wiki/Real_parthttp://en.wikipedia.org/wiki/Determinanthttp://en.wikipedia.org/wiki/Routh%E2%80%93Hurwitz_theoremhttp://en.wikipedia.org/wiki/Routh%E2%80%93Hurwitz_theoremhttp://en.wikipedia.org/wiki/Routh%E2%80%93Hurwitz_theoremhttp://en.wikipedia.org/wiki/Half-planehttp://en.wikipedia.org/wiki/Half-planehttp://en.wikipedia.org/wiki/Sturm%27s_theorem#Generalized_Sturm_chainshttp://en.wikipedia.org/wiki/Euclid%27s_algorithmhttp://en.wikipedia.org/wiki/Fundamental_theorem_of_algebrahttp://en.wikipedia.org/wiki/Stable_polynomialhttp://en.wikipedia.org/wiki/Stable_polynomialhttp://en.wikipedia.org/wiki/Routh-Hurwitz_stability_criterion#Appendix_Ahttp://en.wikipedia.org/wiki/Sylvester_matrixhttp://en.wikipedia.org/wiki/Minor_(linear_algebra)http://en.wikipedia.org/wiki/Minor_(linear_algebra)http://en.wikipedia.org/wiki/Sylvester_matrixhttp://en.wikipedia.org/wiki/Routh-Hurwitz_stability_criterion#Appendix_Ahttp://en.wikipedia.org/wiki/Stable_polynomialhttp://en.wikipedia.org/wiki/Stable_polynomialhttp://en.wikipedia.org/wiki/Stable_polynomialhttp://en.wikipedia.org/wiki/Fundamental_theorem_of_algebrahttp://en.wikipedia.org/wiki/Euclid%27s_algorithmhttp://en.wikipedia.org/wiki/Sturm%27s_theorem#Generalized_Sturm_chainshttp://en.wikipedia.org/wiki/Half-planehttp://en.wikipedia.org/wiki/Half-planehttp://en.wikipedia.org/wiki/Routh%E2%80%93Hurwitz_theoremhttp://en.wikipedia.org/wiki/Determinanthttp://en.wikipedia.org/wiki/Real_parthttp://en.wikipedia.org/wiki/Negative_and_positive_numbers
-
8/3/2019 Control System Modeling
20/24
location of the poles of a transfer function as some parameter
(generally the
gain K)isvaried.The locus of the roots of the characteristic
equation of the
closed loop system as the gain varies from zero to infinity
gives the name of
the method. Such a plot shows clearly the contribution of each
open loop pole
or zero to the locations of the closed loop poles.
This method is very powerful graphical technique for
investigating the
effects of the variation of a system parameter on the locations
of the closed
loop poles. General rules for constructing the root locus exist
and if the
designer follows them, sketching of the root loci becomes a
simple matter.
The closed loop poles are the roots of the characteristic
equation of the system.From the design viewpoint, in some systems
simple gain adjustment can
move the closed loop poles to the desired locations. Root loci
are completed
to select the best parameter value for stability.
A normal interpretation of improving stability is when the real
part of a
pole is further left of the imaginary axis.
Open and Closed Loop Transfer Functions
A control system is often developed into an equation as shown
below
D(s) = (s -p 1).(s -p 2).. (s -p n) is the characteristic
equation for the system...
Normally n > m.
F(s) = 0 when s = z 1,z 2... z n..These values of s are called
zeros
F(s) = infinity when s = p 1, p 2....p n...These values of s are
called poles..Below is shown a root loci plot with a zero of -2 and
a pole of (-2 + 2 j ). In
practice one complex pole /zero always comes with a second one
mirrored
around the real axis
-
8/3/2019 Control System Modeling
21/24
The Transfer function F(s) can also be written in polar form
using
vectors(modulus-argument.
The complex numbers in polar form have the following
elementaryproperties..
|z 1 .z 2 |= |z 1 |.|z 2 |..&..|z 1 / z 2 | = |z 1 | / |z 2
|
A typical feedback system is shown below
The open-loop transfer function between the forcing input R(s)
and themeasured output Y1(s) =
T1(s) = K.G(s)H(s)
The closed-loop transfer function =
K is the value of the open loop gain>
1+ KG(s)H(s) is the characteristic equation
A closed loop pole (when T(s) = infinity) must satisfy
-
8/3/2019 Control System Modeling
22/24
K.G(s).H(s) = -1
This is can be interpreted using vectors
If G(s) = Q(s)/P(s) and H(s) = W(s)/V(s) Then the
characteristic
equation for the open loop transfer function =
P(s).V(s)= 0
The corresponding characteristic equation for the closed loop
system =
P(s).V(s) + K.Q(s)W(s) = 0
Unit 5
Sampled Data control systems
A type of digital control system in which one or more of the
input oroutput signals is a continuous, or analog, signal that has
been sampled. There
are two aspects of a sampled signal: sampling in time and
quantization in
amplitude. Sampling refers to the process of converting an
analog signal from
a continuously valued range of amplitude values to one of a
finite set ofpossible numerical values. This sampling typically
occurs at a regular
sampling rate, but for some applications the sampling may be
aperiodic or
random.
While the device to be controlled is usually referred to as the
plant,sampled-data control systems are also used to control
processes. The term
plant refers to machines or mechanical devices which can usually
be
mathematically modeled by an analysis of their kinematics, such
as a roboticarm or an engine. A process refers to a system of
operations such as a batch
reactor for the production of a particular chemical, or the
operation of a
nation's economy. The output of the plant which is to be
controlled is called
the controlled variable. A regulator is one type of sampled-data
control system,
and its purpose is to maintain the controlled variable at a
preset value (forexample, the robotic arm at a particular position,
or an airplane turboprop
engine at a constant speed) or the process at a constant value
(for example, the
http://www.answers.com/topic/quantizationhttp://www.answers.com/topic/amplitudehttp://www.answers.com/topic/aperiodichttp://www.answers.com/topic/kinematicshttp://www.answers.com/topic/presethttp://www.answers.com/topic/turboprophttp://www.answers.com/topic/turboprophttp://www.answers.com/topic/presethttp://www.answers.com/topic/kinematicshttp://www.answers.com/topic/aperiodichttp://www.answers.com/topic/amplitudehttp://www.answers.com/topic/quantization
-
8/3/2019 Control System Modeling
23/24
concentration of an acid, or the inflation rate of an economy).
This input iscalled the reference or setpoint.
The second type of sampled-data control system is a
servomechanism,
whose purpose is to make the controlled variable follow an input
variable.Examples of servomechanisms are a robotic arm used to
paint automobileswhich may be required to move through a predefined
path in three-
dimensional space while holding the sprayer at varying angles,
an automobile
engine which is expected to follow the input commands of the
driver, a
chemical process that may require the pH of a batch process to
change at a
specified rate, and an economy's growth rate which is to be
changed byaltering the money supply. See also Analog-to-digital
converter; Processcontrol; Regulator; Servomechanism.
The analog-to-digital converter changes the sampled signal into
a binarynumber so that it can be used in calculations by the
digital compensator. Since
a digital controller computes the control signal used to drive
the plant, a
digital-to-analog converter must be used to change this binary
number to an
analog voltage. The digital compensator in the typical
sampled-data controlsystem takes the digitized values of the analog
feedback signals and combines
them with the setpoint or desired trajectory signals to compute
a digital control
signal, to actuate the plant through the digital-to-analog
converter. A
compensator is used to modify the feedback signals in such a way
that the
dynamic performance of the plant is improved relative to some
performanceindex. See alsoControl systems; Digital computer;
Digital control; Digital-to-analog converter.
CONTROLLABILITY
A system with internal state vectorx is called controllable if
and only if
the system states can be changed by changing the system
input.
A state x0 is controllable at time t0 if for some finite time t1
there exists
an input u(t) that transfers the state x(t) from x0 to the
origin at time t1.
A system is called controllable at time t0 if every state x0 in
the state-space is controllable.
http://www.answers.com/topic/servomechanismhttp://www.answers.com/topic/analog-to-digital-converterhttp://www.answers.com/topic/regulatorhttp://www.answers.com/topic/servomechanismhttp://www.answers.com/topic/trajectoryhttp://www.answers.com/topic/actuatehttp://www.answers.com/topic/control-system-engineeringhttp://www.answers.com/topic/computerhttp://www.answers.com/topic/digital-controlhttp://www.answers.com/topic/digital-to-analog-converterhttp://www.answers.com/topic/digital-to-analog-converterhttp://www.answers.com/topic/digital-to-analog-converterhttp://www.answers.com/topic/digital-to-analog-converterhttp://www.answers.com/topic/digital-controlhttp://www.answers.com/topic/computerhttp://www.answers.com/topic/control-system-engineeringhttp://www.answers.com/topic/actuatehttp://www.answers.com/topic/trajectoryhttp://www.answers.com/topic/servomechanismhttp://www.answers.com/topic/regulatorhttp://www.answers.com/topic/analog-to-digital-converterhttp://www.answers.com/topic/servomechanism
-
8/3/2019 Control System Modeling
24/24
OBSERVABILITY
The state-variables of a system might not be able to be measured
for any of
the following reasons:
1. The location of the particular state variable might not be
physicallyaccessible (a capacitor or a spring, for instance).
2. There are no appropriate instruments to measure the state
variable, orthe state-variable might be measured in units for which
there does notexist any measurement device.
3. The state-variable is a derived "dummy" variable that has no
physicalmeaning.
If things cannot be directly observed, for any of the reasons
above, it can be
necessary to calculate or estimate the values of the internal
state variables,using only the input/output relation of the system,
and the output history of the
system from the starting time. In other words, we must ask
whether or not it ispossible to determine what the inside of the
system (the internal system states)
is like, by only observing the outside performance of the system
(input and
output)? We can provide the following formal definition of
mathematical
observability:
OBSERVABILITY
A system with an initial state,x(t0) is observable if and only
if the valueof the initial state can be determined from the system
output y(t) that has beenobserved through the time interval t0 <
t< tf. If the initial state cannot be so
determined, the system is unobservable.
Complete Observability
A system is said to be completely observable if all the possible
initial
states of the system can be observed. Systems that fail this
criteria are said to
be unobservable.
A system state xi is unobservable at a given time ti if the
zero-input
response of the system is zero for all time t. If a system is
observable, then the
only state that produces a zero output for all time is the zero
state. We can usethis concept to define the term
state-observability.
STATE-OBSERVABILITY
A system is completely state-observable at time t0 or the pair
(A, C) is
observable at t0 if the only state that is unobservable at t0 is
the zero state x = 0.