Embed Size (px)
Citation preview

Abstract�The proof of global convergence of the linearly constrained constant modulus algorithm (LCCMA), in the absence of noise, for an asynchronous DS-CDMA system is given. After initial convergence by LCCMA switch over to decision directed (DD) algorithms is standard practice. A measure of the non-ideal properties of the channel is used to modify the switch over to the DD-LMS algorithm to improve its own stability and steady-state performance. Simulation results are used to demonstrate the increase in performance.
I. INTRODUCTION
he performance of personal wireless communications systems using direct sequence code division multiple
access (DS-CDMA) can be greatly enhanced by using signal processing techniques, such as multiuser detection (MUD) [1]. MUD improves the performance by reducing the amount of multiple access interference (MAI) at the receiver.
The MUD considered in this paper is categorized as a linear scheme and is applicable when short spreading codes are used. In this paper, blind indicates that only the timing and spreading code information of the desired user is known at the receiver. Blind implementations are desirable because they are spectrally more efficient than their trained counter parts (they circumvent the need for pilot channels). Adaptive schemes are desirable because they offer a lower computa-tional complexity and have the ability to track a time varying channel.
The constant modulus algorithm (CMA) is perhaps the most widely studied and used, practical blind equalization algorithm [2], [3], due to its computational simplicity and robustness. The CMA has recently been applied to the blind adaptive MUD problem, where the various versions: linearly constrained (LC-) CMA [4], [5], multiuser (MU-) CMA [6], cross correlation (CC-) CMA [7], and linearly constrained differential (LCD-) CMA [8] have modified the CMA cost function to ensure that the desired user is captured. The LCCMA scheme is considered in this paper because of its relative simplicity and proven resilience under mismatch conditions [4].
The uplink of a future generation mobile wireless com-munications system would typically make use of an asyn-chronous DS-CDMA system with short spreading codes. The
This work was partially supported by Alcatel Altech Telecoms
and Telkom SA as part of the Centres of Excellence Programme. The financial assistance of the Department of Labour (DoL)
towards this research is hereby acknowledged. Opinions expressed and conclusions arrived at, are those of the author and are not nec-essarily to be attributed to the DoL.
global convergence in the mean of the LCCMA was proven in [5], but only for the synchronous case. This paper extends the proof of [5] to the asynchronous case by using a unique block matrix formulation of the Hessian matrix of the LCCMA cost function. The Hessian matrix defines the cur-vature of the cost surface at every point. Global convergence is proved by showing that the Hessian matrix is positive definite. A positive definite Hessian matrix indicates that the cost surface is convex, which in turn proves that there is a unique global minimum to the cost function. If the cost function has a unique minimum, then a stochastic gradient algorithm is guaranteed to converge to the global minimum, irrespective of the initialization of the adaptive filter.
The LCCMA is a powerful algorithm for converging to the MMSE receiver in a completely unknown operating envi-ronment. Once the LCCMA algorithm has converged to the neighborhood of the MMSE receiver, there are however better algorithms to switch over to that will have a lower excess mean square error (EMSE) in the tracking and steady-state phases of the adaptive algorithm. These algo-rithms� convergence properties are not as robust as that of the LCCMA, which is why LCCMA is required to get the re-ceiver into the neighborhood of the MMSE receiver. One widely touted algorithm [9] to use is the decision-directed LMS algorithm. The DD-LMS algorithm was originally formulated for the blind equalization of intersym-bol-interference (ISI) channels. These happen to be quite different from the multiuser CDMA channel, and hence their performance is reduced.
This paper suggests a method of quantifying the deviation away from the ideal conditions that the DD-LMS was in-tended to operate in. This metric is then used to improve the performance of DD-LMS when applied to the blind MUD application. Improvements in both stability and steady-state EMSE of the modified DD-LMS are demonstrated via simu-lation.
This paper is organized as follows: section II outlines the signal model and LCCMA, section III proves the global convergence of the LCCMA in an asynchronous DS-CDMA system, and section IV outlines the modifications made to the DD-LMS algorithm. Simulation results are given in section V, and concluding remarks are made in section VI.
II. SYSTEM MODEL
A. Transmitter An asynchronous (wideband) DS-CDMA transmitter
model for the uplink of a mobile radio network is considered. The baseband representation of the kth user�s transmitted
Convergence Analysis of the LCCMA in an Asynchronous DS-CDMA System
James Whitehead and Fambirai Takawira School of Electrical, Electronic and Computer Engineering, University of Natal,
Durban 4041, South Africa [email protected], [email protected]
T

signal is given by
( ) ( ) ( )k k k k ki
x t A b i s t iT τ∞
=−∞
= − −∑ (1)
where Ak and sk denote the amplitude and normalised spreading waveform of the kth user respectively, and T is the data symbol duration. The relative offset of the kth user�s asynchronous signal is given by kτ , which takes on integer values in the range )0,31 . The kth user�s ith transmitted symbol ( )kb i takes on the values { }1, 1+ − with equal probability. The spreading waveform takes the form
( ) ( ) ( ) [ ]1
0
, 0,N
k k cn
s t c n t nT t Tψ−
=
= − ∈∑ (2)
where N is the processing gain and ck is the kth user�s spreading code sequence of ±1�s, ( )tψ is the chip pulse shape of duration .cT T N= It is noted that ( )ks t only takes on values in the interval [0, T].
B. Receiver The received signal is passed through a chip-matched filter
and sampled at the chip-rate. These samples are concatenated into a length N vector of received samples. Let
[ ] ( ) ( )0, ,0, 0 , 1T
k k k k ks s Nτ τ= − − s … … be the down shifted (by amount kτ ) version of discrete signature sequence vector Ks , of length N. Define,
( ) ( ) ( )1 1 , ,T
k k kN c c N= s … (3)
[ ] [ ] [ ] [ ]1 2 20 0 , , , K Kτ τ = S s s s… (4)
[ ] ( ) ( )2 21 , , , K KN Nτ τ = − − − − S 0 s s… (5)
where ( )k kN τ− − s is the up shifted version of ks , also padded with zeros. The first entry in (5) is the zero vector as the receiver is bit synchronized to the desired user 1( 0).τ = Using this notation, the received vector of samples from the chip-matched filter is given by,
[ ] ( ) [ ] ( )0 1 1i i= + + +r S Ab S Ab n (6)
( ) ( ) ( )1 , , ,T
Ki b i b i = b … [ ]( )1diag , , KA A=A … , is a di-agonal matrix with the users� amplitudes along the main diagonal, and ( )in is an additive white Gaussian noise vector with covariance matrix 2 .Nσ I The vector ( )ir is filtered by a finite impulse response (FIR) filter structure, whose coefficients form the vector
( ) ( ) ( )1 , , .T
Ni w i w i= w … The desired user, from here on, will be user 1. The output of the filter, which constitutes the decision statistic, is given by
( ) ( ) ( ).Ty i i i= w r (7)
C. LCCMA The non-canonically constrained LCCMA is based on the
CMA2-2 [2] algorithm, and attempts to minimize the cost function,
( )( ) ( ) ( )( )22
1Ti E i i = −
J w w r (8)
subject to the linear constraint 1 11 .T A=w s The LCCMA uses its estimate of the desired user�s signature sequence,
1,s to prevent the capture of unwanted users. The cost func-
tion, as it stands, is not amenable to conventional stochastic gradient techniques due to the constraint, but by making use of the canonical representation of the MMSE filter [9] it is possible to split the filter coefficients into two orthogonal components: a fixed (or non-adaptive) part, and an adaptive part, given by
( ) ( )11 1 .i A i−
⊥= +w s w (9)
The filter component orthogonal to the spreading code, ⊥w , is adapted without a constraint. The update step of the
adaptive algorithm is given by,
( ) ( ) ( ) ( )( )( ) ( )21 1i i y i y i iµ⊥ ⊥ ⊥+ = + −w w r (10)
where µ is a small positive constant (step size). The or-thogonal projection of the received vector,
( ) ( ) ( )1 1,Ti i i⊥ = −r r s r s (11)
is used in (10) to ensure that ⊥w remains orthogonal to 1,s this in turn ensures that the constraint, 1 11T A=w s is always met. Reference [5] showed that the LCCMA converges to a scaled version of the MMSE filter, which is given by,
1
11
1 1 1opt TA
−
−=C s
ws C s
(12)
( ) ( ){ }
[ ] [ ] [ ] [ ] 20 0 1 1 .
T
T T T T
E i i
σ
=
= + +
C r r
S AA S S AA S I (13)
III. CONVERGENCE ANALYSIS FOR ASYNCHRONOUS DS-CDMA
The technique used to prove the global convergence property of the LCCMA in an asynchronous DS-CDMA system follows the same technique as that presented in [10]. This paper differs in the definition of the u and u vectors, as well as the block matrix notation used for the first and second derivatives of the LCCMA cost function, in order to accommodate the asynchronous data transmission of the various users. Define vectors 0u and 1u whose elements correspond to the contribution at the output of the filter of the users� current and successive transmitted bits,
[ ]( ) [ ]( )0 10 and 1 .T T
= =u S A w u S A w (14)
The kth element of 0u and 1u are given by respectively,
[ ]( ) ( )( )0, 1,and .T Tk k k k k k k ku A u A Nτ τ= = − − w s w s (15)
The output of the chip-matched matched filter may now be written as
0 0 1 1.T T T= +w r b u b u (16)
Expanding the cost function in (8), we have
( ) ( ) ( ){ }4 22 1 .T TJ E= − +w w r w r (17)
Using the relationship in (16), the cost function ( )J w may be expressed in terms of 0u and 1u ,
( ){ }2
0 0 1 1T T TE = +w r u u u u (18)

−1−0.5
00.5
1
−1
−0.5
0
0.5
10
1
2
3
4
5
6
u0,2
u1,2
φ(u 0,u
1)
Fig. 1. Surface Plot of LCCMA cost function (20) for a two user asynchronous system.
( ){ } ( ){ }( ) ( )
( ) ( ) ( )( )
4 2
0 0 0 0 1 1 0 0 1 1 1 1
2 4
0 0 0,1
2 4
1 1 2, 0 0 1 11
2
3 2
3 2 6 ,
T T T T T T T
KT
kk
KT T T
kk
E E
u
u
=
=
= + +
= −
+ − +
∑
∑
w r b u b u u b b u u b b u
u u
u u u u u u
(19)
since the linear constraint in (8) is equivalent to 0,1 1u = , the cost function in (17) can be written as,
( ) ( ) ( ) ( )
( ) ( )( )( )
0,1
2 24
0 1 0 0 0, 1 11 1
4
1, 0 0 1 11
0 0 1 1
min , 3 2 3
2 6
2 1.
KT T
ku k
KT T
kk
T T
u
u
φ=
=
=
= − +
− +
− + +
∑
∑
u u u u u u
u u u u
u u u u
(20)
We need to find the stationary points of the cost function, to do this define a new column vector
0
1
=
uu
u (21)
where 0 0,2 0,, ,T
Ku u = u … , and 1 1,2 1,, ,T
Ku u = u … . Define a new cost function in terms of u which is equivalent to (20)
( ) ( )0 1,φ φ=u u u (22)
The first derivative takes the form (using block matrix notation)
( )
( )
( )0
1
φφ
φ
∂
∂∂ = ∂ ∂ ∂
uuu
u uu
(23)
where the elements of ( )
0
φ∂∂
uu
are given by
( ) ( )( ) ( )
( ) ( )( )
( )
20, 0 0 0, 0, 1 1
0,
20, 0 0 0, 1 1
2 2 20, 1 0, 0, 1,
2 2
4 3 1 2 12
4 3 1 2 3
4 3 1 3 3 ,
T Tk k k
k
T Tk k
K K
k k j jj jj k
u u uu
u u
u A u u u
φ
= =≠
∂= − − +
∂
= − − +
= − + + +
∑ ∑
uu u u u
u u u u (24)
and similarly for( )
1
φ∂∂
uu
:
( ) ( ) 2 2 21, 1 1, 1, 0,
2 21,
4 3 1 3 3K K
k k j jj jkj k
u A u u uu
φ
= =≠
∂ = − + + + ∂
∑ ∑u
(25)
for 2 k K≤ ≤ . From (24) and (25), clearly if ( )13 1 0A − ≥ , then the only
stationary point is when 0 1= =u u 0 (26)
which corresponds to the decorrelating detector, since the MAI has been completely removed. The global convexity of the cost function can be assured by analysing the Hessian matrix of ( )φ u . Using block matrix notation, the Hessian matrix takes the form
( )
( ) ( )
( ) ( )
2 2
220 10
2 2 2
21 0 1
.
φ φφ
φ φ
∂ ∂
∂∂∂ = ∂ ∂ ∂ ∂ ∂
u uu uuu
u u uu u u
(27)
Where the elements of the sub matrices are given by
( ) ( ) ( )( )0 0 1 1
0, 0, 0, 0,
4 3 1 3
24
T T
k l k l
l ku u u u l k
φ − + =∂ = ∂ ∂ ≠
u u u uu (28)
( )1, 0,
0, 1,
24 l kk l
u uu uφ∂
=∂ ∂
u (29)
and similarly for
( ) ( ) ( )( )1 1 1 1
1, 1, 1, 1,
4 3 1 3
24
T T
k l k l
l ku u u u l k
φ − + =∂ = ∂ ∂ ≠
u u u uu (30)
( )0, 1,
1, 0,
24 .l kk l
u uu uφ∂
=∂ ∂
u (31)
When 213 1 0A − ≥ , and thus =u 0 , then the main diagonal
of the Hessian matrix equals ( )214 3 1A − and off diagonal
elements equal 0. Clearly under this condition the Hessian matrix is positive definite, the decorrelating detector is the only stationary point, which is also the global minimum, and thus global convergence is guaranteed. This is the same condition which applies to the synchronous system, which was proved in [10]
The cost function as given in (20) is plotted in Fig. 1 for a two user asynchronous system. In this case 0,1 1u = and
1,1 0,u = as it is assumed that the spreading code and timing of the desired user is known perfectly. The height of the surface in Fig. 1 is equal to the cost function of the remaining two degrees of freedom 0,2u and 1,2u . It can be seen that although the curvature of the cost surface is not constant, there does exist a unique global minimum, corresponding to 0,2 1,2 0u u= = , the decorrelating receiver. (The decorre-lating receiver completely removes MAI. The terms 0,2u and
1,2u are a measure of the residual MAI corresponding to user 2, and when they equal 0 it indicates that all MAI has been removed and thus the receiver is operating as the decorre-lating receiver).
IV. IMPROVING SWITCH OVER TO DD-LMS
A. Relationship between LCCMA and MMSE filter coeffi-cients
It is well known that the optimum tap weight vector of the MMSE filter is given by,
( )11 1 .M A−=w C s (32)
Multiplying the optimal tap weight vector of the non-canonically constrained LCCMA as given in (12) by
1 1A A we get:
( )( )
11 1
11 1 1 1
1 1
,
opt T
MT
M
AA A
A
−
−=
=
C sw
s C sws w
(33)
where it is known that the receiver gain is defined as ( )1 1 .T
MAθ w s" Substituting the 1Ts w term of (33) using
the receiver gain definition we get,
11
1
Mopt
M
AAθ
θ
=×
=
ww
w
(34)
which shows that the LCCMA and the MMSE filter coeffi-cients are collinear, and are related via the scaling factor 1θ − .
B. DD-LMS The update step of the DD-LMS algorithm is given by,
( ) ( ) ( )( )1 sgni i y yµ+ = + −w w r (35)
The DD-LMS algorithm was originally formulated for the blind equalization of ISI channels. The presupposed operat-ing conditions were high SNR and perfectly blind equaliza-bility of the channel. These assumptions differ from the conditions found when performing blind adaptive MUD in a DS-CDMA communications system. For example, in a wireless communications channel phenomena such as fading and shadowing can significantly lower the SNR. Also, there is residual MAI at the output of a MMSE MUD, and the amount increases as SNR decreases. Thus the perfect equalization condition is violated.
It is proposed in this paper that the receiver gain is used to take into account the deviation of the channel away from the ideal conditions expected by DD-LMS. Under ideal condi-tions, the SNR increases to infinity, and the receiver ap-proaches the decorrelating receiver. When this occurs the residual MAI goes to 0, and θ approaches 1. Under non-ideal conditions θ is in the range ( )0,1 with 0 corre-sponding to a SNR of �infinity.
The optimal tap weight vector of the DD-LMS algorithm is the MMSE tap weight vector. The relationship between the MMSE and LCCMA optimal tap weight vector was derived in this paper and given in (34) in terms of the receiver gainθ . The receiver gain is then used to scale the filter coefficients in a once-off manner at the moment of switch over to DD-LMS. This has the effect of removing the scaling between the op-timal DD-LMS filter coefficients (which are the MMSE filter coefficients) and the optimal LCCMA filter coefficients. The scaling could possibly lead to instability at switch over, or convergence towards local minima (scaled MMSE).
C. Estimation of Receiver Gain The receiver gain, θ , can be estimated by making use of
an approximation of the MMSE given in [9] and the expres-sion for the MMSE achievable with a linear transformation,
min ,ε given in [1] as:
2 1min 1 1 11 .TAε −= − s C s (36)
Using the definition of the receiver gain, (36) can be writ-ten as min 1 .ε θ= − (37)
The approximation given in [9] for minε holds when the signal vectors are approximately orthogonal and is,
2
1min 2 2
1
1 .A
Aε
σ≈ −
+ (38)
Comparing (37) and (38) it is clear that
2
12 2
1
.A
Aθ
σ≈
+ (39)
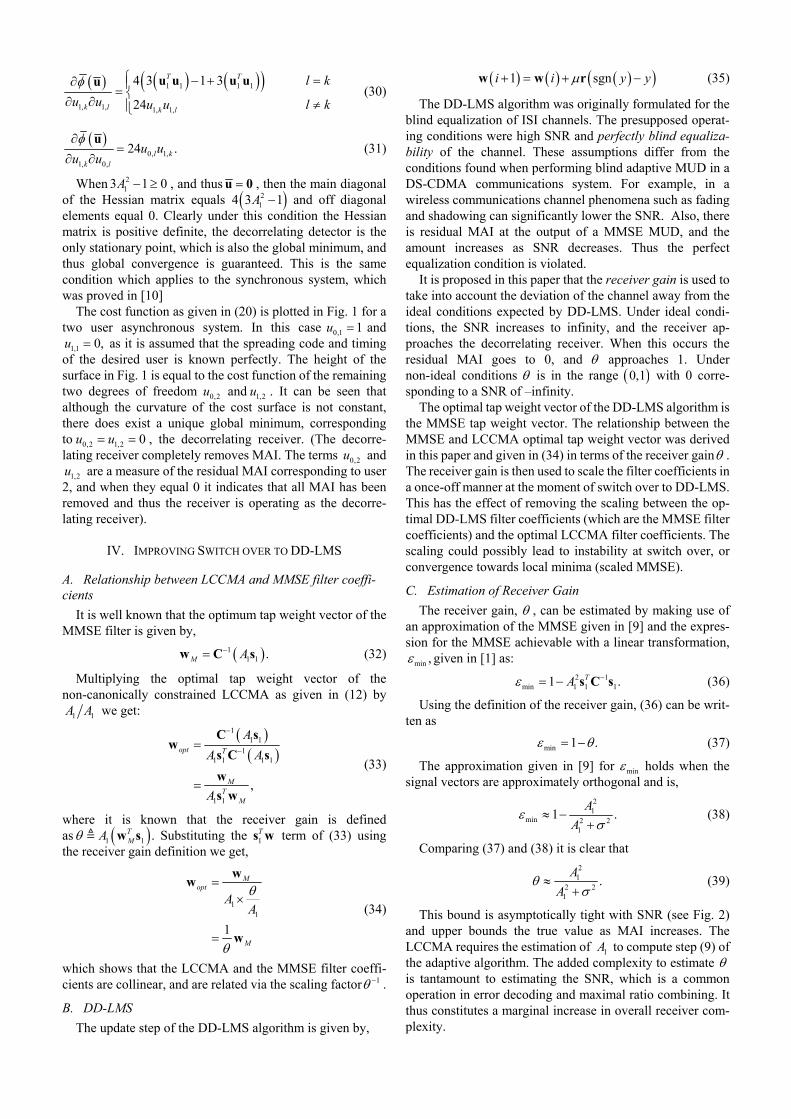
This bound is asymptotically tight with SNR (see Fig. 2) and upper bounds the true value as MAI increases. The LCCMA requires the estimation of 1A to compute step (9) of the adaptive algorithm. The added complexity to estimate θ is tantamount to estimating the SNR, which is a common operation in error decoding and maximal ratio combining. It thus constitutes a marginal increase in overall receiver com-plexity.
0 5 10 15 20 25 300.4
0.5
0.6
0.7
0.8
0.9
1
1.1
SNR (dB)
Exact value of θApproximate value of θ
Fig. 2. Plot of θ and the estimate of θ using (39) as function of SNR. A 10 user system with MAI level of 3dB�s is used.
V. RESULTS All the results were generated using length 31 Gold codes.
The MAI ratio is defined as 1kA A , 1k ≠ , where all the interfering users transmit at the same amplitude. The relative timing offsets of the users were initialized in the range [ )0,31 at the start of a particular simulation, and then fixed for the duration of the simulation. The output SINR at time instant i is defined as
( )( )( )
( ) ( )( )
2
1 1
222
2
T
KT
k kk
A iSINR i
i A iσ=
=+ ∑
w s
w w s (40)
and was obtained from simulating the received vector of samples given in (6) and implementing the LCCMA as given in (10). In Figs. 3-5 the LCCMA is seen to converge correctly in an asynchronous DS-CDMA system as proved in section III.
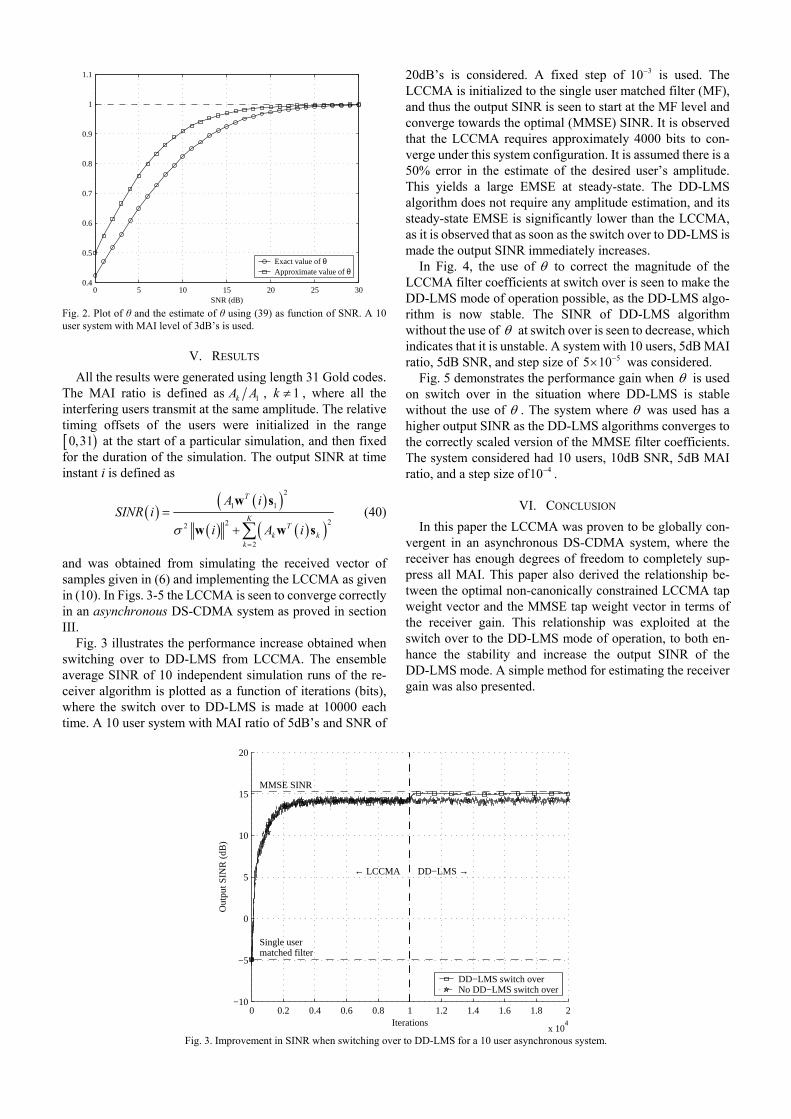
Fig. 3 illustrates the performance increase obtained when switching over to DD-LMS from LCCMA. The ensemble average SINR of 10 independent simulation runs of the re-ceiver algorithm is plotted as a function of iterations (bits), where the switch over to DD-LMS is made at 10000 each time. A 10 user system with MAI ratio of 5dB�s and SNR of
20dB�s is considered. A fixed step of 310− is used. The LCCMA is initialized to the single user matched filter (MF), and thus the output SINR is seen to start at the MF level and converge towards the optimal (MMSE) SINR. It is observed that the LCCMA requires approximately 4000 bits to con-verge under this system configuration. It is assumed there is a 50% error in the estimate of the desired user�s amplitude. This yields a large EMSE at steady-state. The DD-LMS algorithm does not require any amplitude estimation, and its steady-state EMSE is significantly lower than the LCCMA, as it is observed that as soon as the switch over to DD-LMS is made the output SINR immediately increases.
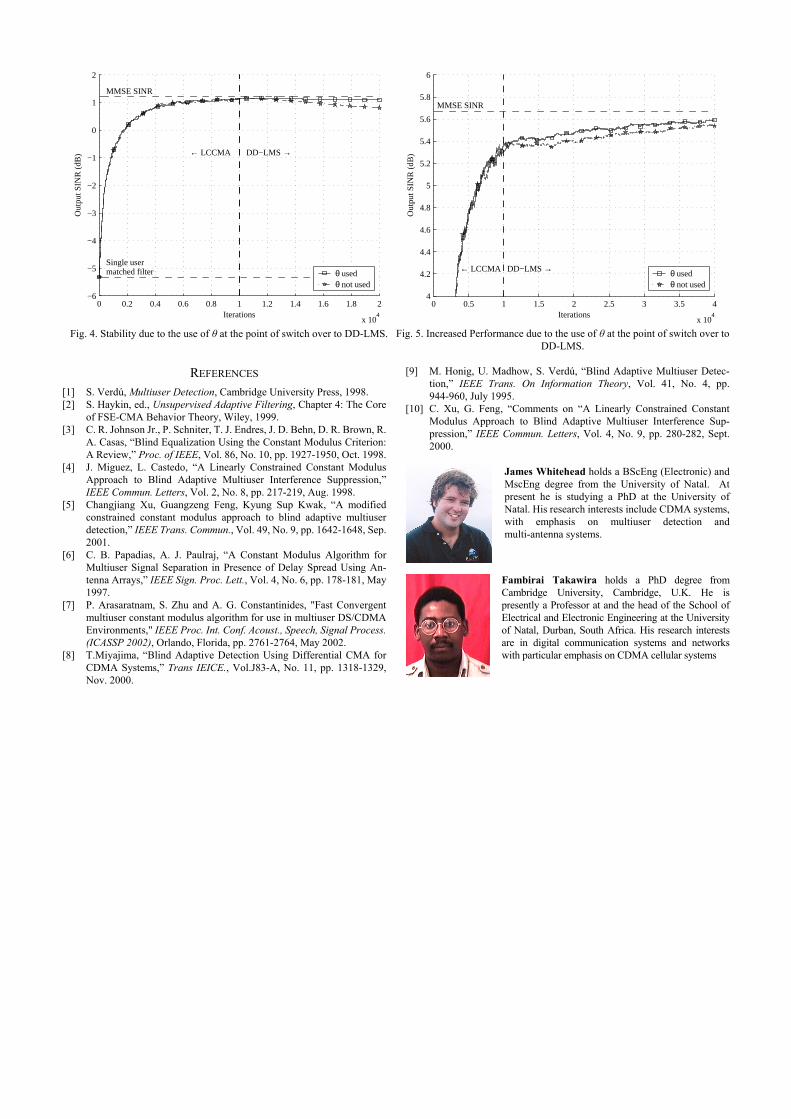
In Fig. 4, the use of θ to correct the magnitude of the LCCMA filter coefficients at switch over is seen to make the DD-LMS mode of operation possible, as the DD-LMS algo-rithm is now stable. The SINR of DD-LMS algorithm without the use of θ at switch over is seen to decrease, which indicates that it is unstable. A system with 10 users, 5dB MAI ratio, 5dB SNR, and step size of 55 10−× was considered.
Fig. 5 demonstrates the performance gain when θ is used on switch over in the situation where DD-LMS is stable without the use of θ . The system where θ was used has a higher output SINR as the DD-LMS algorithms converges to the correctly scaled version of the MMSE filter coefficients. The system considered had 10 users, 10dB SNR, 5dB MAI ratio, and a step size of 410− .
VI. CONCLUSION In this paper the LCCMA was proven to be globally con-
vergent in an asynchronous DS-CDMA system, where the receiver has enough degrees of freedom to completely sup-press all MAI. This paper also derived the relationship be-tween the optimal non-canonically constrained LCCMA tap weight vector and the MMSE tap weight vector in terms of the receiver gain. This relationship was exploited at the switch over to the DD-LMS mode of operation, to both en-hance the stability and increase the output SINR of the DD-LMS mode. A simple method for estimating the receiver gain was also presented.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 104
−10
−5
0
5
10
15
20
DD−LMS →← LCCMA
MMSE SINR
Single usermatched filter
Out
put S
INR
(dB
)
Iterations
DD−LMS switch overNo DD−LMS switch over
Fig. 3. Improvement in SINR when switching over to DD-LMS for a 10 user asynchronous system.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 104
−6
−5
−4
−3
−2
−1
0
1
2
DD−LMS →← LCCMA
MMSE SINR
Single usermatched filter
Out
put S
INR
(dB
)
Iterations
θ usedθ not used
Fig. 4. Stability due to the use of θ at the point of switch over to DD-LMS.
0 0.5 1 1.5 2 2.5 3 3.5 4
x 104
4
4.2
4.4
4.6
4.8
5
5.2
5.4
5.6
5.8
6
DD−LMS →← LCCMA
MMSE SINR
Out
put S
INR
(dB
)
Iterations
θ usedθ not used
Fig. 5. Increased Performance due to the use of θ at the point of switch over to
DD-LMS.
REFERENCES [1] S. Verdú, Multiuser Detection, Cambridge University Press, 1998. [2] S. Haykin, ed., Unsupervised Adaptive Filtering, Chapter 4: The Core
of FSE-CMA Behavior Theory, Wiley, 1999. [3] C. R. Johnson Jr., P. Schniter, T. J. Endres, J. D. Behn, D. R. Brown, R.
A. Casas, �Blind Equalization Using the Constant Modulus Criterion: A Review,� Proc. of IEEE, Vol. 86, No. 10, pp. 1927-1950, Oct. 1998.
[4] J. Miguez, L. Castedo, �A Linearly Constrained Constant Modulus Approach to Blind Adaptive Multiuser Interference Suppression,� IEEE Commun. Letters, Vol. 2, No. 8, pp. 217-219, Aug. 1998.
[5] Changjiang Xu, Guangzeng Feng, Kyung Sup Kwak, �A modified constrained constant modulus approach to blind adaptive multiuser detection,� IEEE Trans. Commun., Vol. 49, No. 9, pp. 1642-1648, Sep. 2001.
[6] C. B. Papadias, A. J. Paulraj, �A Constant Modulus Algorithm for Multiuser Signal Separation in Presence of Delay Spread Using An-tenna Arrays,� IEEE Sign. Proc. Lett., Vol. 4, No. 6, pp. 178-181, May 1997.
[7] P. Arasaratnam, S. Zhu and A. G. Constantinides, "Fast Convergent multiuser constant modulus algorithm for use in multiuser DS/CDMA Environments," IEEE Proc. Int. Conf. Acoust., Speech, Signal Process. (ICASSP 2002), Orlando, Florida, pp. 2761-2764, May 2002.
[8] T.Miyajima, �Blind Adaptive Detection Using Differential CMA for CDMA Systems,� Trans IEICE., Vol.J83-A, No. 11, pp. 1318-1329, Nov. 2000.
[9] M. Honig, U. Madhow, S. Verdú, �Blind Adaptive Multiuser Detec-tion,� IEEE Trans. On Information Theory, Vol. 41, No. 4, pp. 944-960, July 1995.
[10] C. Xu, G. Feng, �Comments on �A Linearly Constrained Constant Modulus Approach to Blind Adaptive Multiuser Interference Sup-pression,� IEEE Commun. Letters, Vol. 4, No. 9, pp. 280-282, Sept. 2000.
James Whitehead holds a BScEng (Electronic) and MscEng degree from the University of Natal. At present he is studying a PhD at the University of Natal. His research interests include CDMA systems, with emphasis on multiuser detection and multi-antenna systems.
Fambirai Takawira holds a PhD degree from Cambridge University, Cambridge, U.K. He is presently a Professor at and the head of the School of Electrical and Electronic Engineering at the University of Natal, Durban, South Africa. His research interests are in digital communication systems and networks with particular emphasis on CDMA cellular systems





























