Embed Size (px)
Citation preview

Corso di Laboratorio di AutomaticaRoberto Ronchini, 1 Giugno 2004
Sensori ed attuatori di frequente utilizzo nei Controlli Automatici

I sensori (1)
• Il trasduttore è un dispositivo che trasforma grandezze fisiche da misurare in segnali di natura elettrica.
• Un trasduttore si compone di tre parti: un’interfaccia di ingres-so, un sensore ed un’interfaccia di uscita.
• Il sensore è l'elemento che converte la grandezza fisica in in-gresso (da misurare) in una grandezza fisica in uscita facilmente acquisibile per via elettrica (tensione, corrente, capacità, resi-stenza, induttanza, ecc.).
Interfaccia di ingresso
Sensore Interfaccia di uscita

I sensori (2)
• Le grandezze fisiche in oggetto appartengono a due categorie: continue e discrete. Le informazioni associate alle grandezze fisiche sono dette segnali.
• Le grandezze continue sono descritte da segnali analogici, quelle discrete da segnali logici (due valori ammissibili), oppure da segnali codificati (il numero di valori ammissibili èsuperiore a due).
• L'informazione associata alla grandezza analogica campionata e quantizzata viene detta segnale digitale.
• È importante tenere sempre in considerazione gli errori che èpossibile commettere nell’operazione di acquisizione e nella pro-cedura di elaborazione digitale del segnale (campionamento e quantizzazione).

I sensori (3)
I trasduttori possono essere classificati in base a quattro proprietà:• Caratteristica statica. Rappresenta il comportamento del
sensore a regime permanente, ottenuta variando lentamente la variabile di ingresso del sensore e registrando la corrispondente uscita.
• Caratteristica dinamica. Rappresenta il comportamento in uscita del trasduttore quando la variabile di ingresso varia molto velocemente; questa si riflette in un limite alla banda passantedel sistema di controllo.
• Dipendenza da fattori ambientali. Di solito influenzano in maniera non trascurabile il comportamento di un trasduttore.
• Affidabilità. L’affidabilità si definisce come il tempo medio che impiega un trasduttore a guastarsi (MTBF, mean time betweenfailure).

I sensori (4)
Caratteristica statica1. Linearità. Un sensore idealmente dovrebbe avere una
caratteristica lineare, y=Kx, con coefficiente angolare costante (guadagno) e offset nullo. In realtà, la caratteristica non è mai lineare, il guadagno non è mai costante, l’offset non è mai nullo, ecc.

I sensori (5)
Caratteristica statica2. Precisione. La precisione di un trasduttore è indice di quanto
siano ripetibili le sue misure. In effetti, può accadere che, eseguendo più misurazioni della stessa grandezza fisica, il trasduttore fornisca misure diverse tra loro.
3. Accuratezza. L'accuratezza è una misura di quanto l'uscita del trasduttore si scosta da quella che dovrebbe essere la sua uscita ideale.

I sensori (6)
Caratteristica dinamicaIl comportamento dinamico di un trasduttore è descritto dalla sua risposta in frequenza.Parametri classici sono: tempo di salita, tempo di assestamento,banda passante, ecc.

I sensori (7)
Un trasduttore converte una grandezza fisica in una elettrica.• Sensori di tipo resistivo (potenziometri, estensimetri, termi-
stori, fotoresistori).• Sensori di tipo induttivo (a singolo avvolgimento e a trasfor-
matore).• Sensori di tipo capacitivo (sensori di posizione o di livello di li-
quidi).• Sensori termoresistivi e termoelettrici (termocoppie).• Sensori di tipo piezoelettrico e piezoresistivi (accelerometri,
sensori di vibrazione).• Sensori ad effetto Hall (misura di corrente o di angoli).

Encoder ottico
• Gli encoder ottici sono dispositivi che convertono la posizione angolare meccanica in un segnale elettrico per mezzo di un disco rotante opportunamente sagomato, una sorgente luminosa (tipicamente uno o più diodi LED) e un sensore foto-rivelatore (tipicamente uno o più fotodiodi o fototransistor).
• Attraverso un opportuno circuito elettronico tale informazione viene convertita in una misura di velocità o posizione.
• Gli encoder possono essere classificati come rotativi o lineari, a seconda che misurino spostamenti angolari o lineari.
• Gli encoder rotativi sono solitamente muniti di asse con cuscinetti a sfere, molto frequentemente sono montati all’asse di uscita di motori.
• Usualmente gli encoder sono realizzati con diodi LED (GaAsP-GaP) a lente collimata e array di elementi fotosensibili.

Encoder ottico incrementale (1)
Il disco è costituito da un anello di settori opachi e trasparentialternati; questo, ruotando, interrompe il flusso luminoso diretto al foto-rilevatore, generando un treno di impulsi digitali.
Il numero di settori (C/R, cycles per revolution) definisce la risoluzione dell’encoder. Solitamente C/R va da 100 a 218.
L’encoder incrementale richiede circuiti ausiliari di decodifica, ed ènecessario determinarne a parte verso di rotazione e zero.

Encoder ottico incrementale (2)
Una sequenza secondaria di settori sfasati di ¼ di periodo rispetto alla principale permette di generare due segnali dai quali è possibile ricavare il verso di rotazione (segnali in quadratura, canali A e B). Un settore più interno fornisce un segnale di giro concluso.
Poiché in una architettura di controllo digitale un encoder frequente-mente pilota un contatore, in commercio si trovano spesso encoder con C/R pari a 2N per angolo giro.
indice di giro
settori di fase A e B
Un encoder ottico incrementale ècostituito da un disco sulla cui periferia sono disposte una sequenza di finestrelle.

Encoder ottico incrementale (3)
HP HEDS-5540

Encoder ottico incrementale (4)
HP HEDS-5540

Encoder ottico incrementale (5)
Attraverso una moltiplicazione elettronica è possibile aumentare fino a quattro volte la risoluzione di un normale encoder contando i fronti di salita e discesa di entrambe le fasi A e B.

Encoder ottico incrementale (6)
Applicazione circuitale più frequente come sistema di misura di una velocità o posizione angolare.
ENCODER OTTICO
INCREMENTALEA
B
I
DECOD. VERSO FF-D
MICROCONTROLLORE
16/32 bit Counter
Segnale di inizio giro
Misura del verso di rotazione0 = orario1 = antiorario
Il contatore può essere triggerato
anche da una fase Clock
U/D
D Ck
× 4
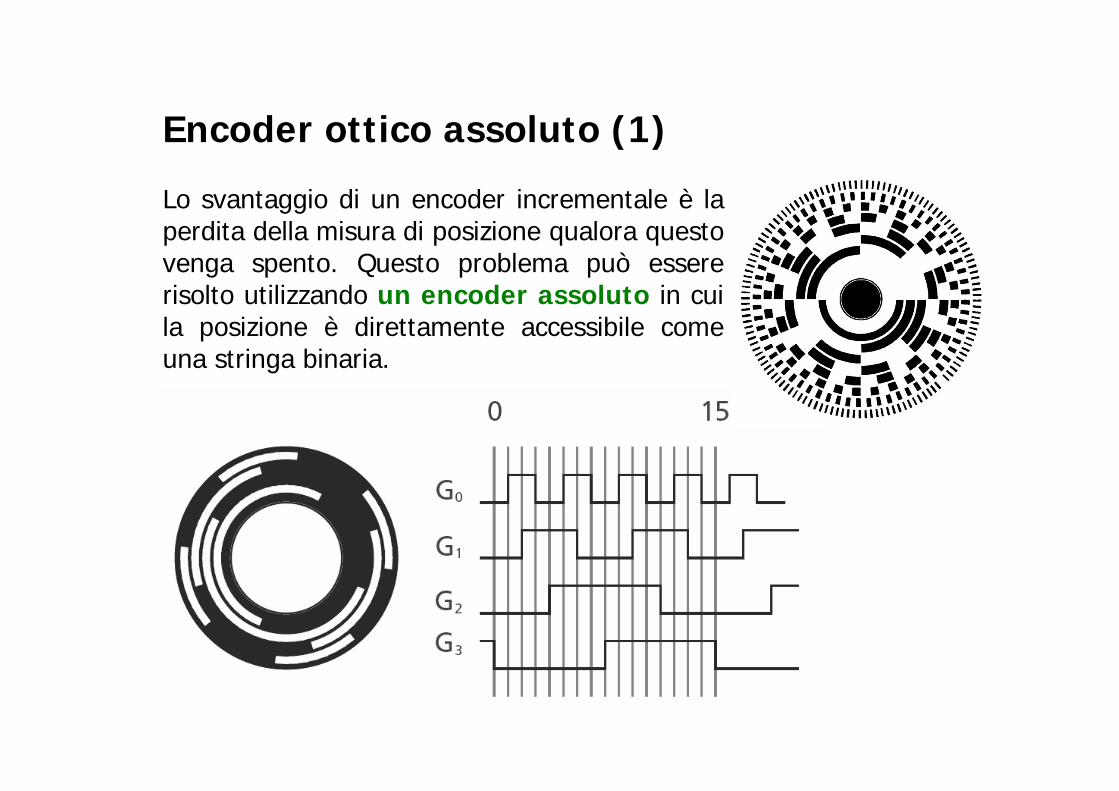
Encoder ottico assoluto (1)
Lo svantaggio di un encoder incrementale è la perdita della misura di posizione qualora questo venga spento. Questo problema può essere risolto utilizzando un encoder assoluto in cui la posizione è direttamente accessibile come una stringa binaria.

Encoder ottico assoluto (2)
È costituito da un disco opportunamente sagomato in modo da generare un’informazione assoluta di posizione digitale secondo diverse tecniche di codifica:• naturale (codifica binaria pura, più intuitiva)• BCD• Gray (commuta un bit alla volta, non genera fenomeni di alea)
Fenomeno di alea:
Con codifica naturale, ad es., passando da 3 (011) a 4 (100) si possono verificare le sei possibili transizioni con due stati spuri:
A. 011 (3) – 111 (7) – 101 (5) – 100 (4)B. 011 (3) – 111 (7) – 110 (6) – 100 (4)C. 011 (3) – 001 (1) – 101 (5) – 100 (4)D. 011 (3) – 001 (1) – 000 (0) – 100 (4)E. 011 (3) – 010 (2) – 110 (6) – 100 (4)F. 011 (3) – 010 (2) – 000 (0) – 100 (4)

Encoder ottico assoluto (3)
Esempio di codifica naturale, Gray e BCD.

Encoder magnetico
Un encoder magnetico è composto da un disco rotante dentato realizzato in materiale ferroso, da un magnete permanente (pick-up) e da un elemento di misura magneto-sensibile.Quando il disco ruota, la dentatura passando tra il magnete ed il sensore disturba il flusso magnetico emesso dal magnete permanente, deviandolo. L’elemento magneto-sensibile genera un segnale digitale in funzione delle variazioni del campo magnetico percepite.Esistono due tipi di pick-up:1. ad effetto Hall;2. a riluttanza variabile.

Resolver (1)
Il principio di funzionamento del resolver si basa sulla variazione dell'accoppiamento (di tipo trasformatorico) tra due sistemi di avvolgimenti elettrici rotanti l'uno rispetto all'altro. Sul primo sistema (generatore) viene impressa una tensione sinusoidale alternata che genera un flusso magnetico che, accoppiandosi con il circuito del secondo sistema (rivelatore), crea una tensione indotta dipendente dalla tensione impressa sul primario e dalla posizione relativa dei due sistemi.
( )( ) ( )( ) ( )θω
θω
ω
sinsin
cossin
sin
2
1
tKAV
tKAV
tAV
s
s
p
=
=
=

Resolver (2)
• La pulsazione della portante di alimentazione ω usualmente va-ria da 500 Hz a 20 kHz.
• La pulsazione della portante di alimentazione ω deve aumentare all’aumentare della velocità di funzionamento del resolver.
• Esistono realizzazioni con n coppie di espansioni polari in cui il sensore fornisce la posizione assoluta all'interno di un giro elet-trico, a cui corrispondono n giri meccanici. Tale soluzione con-sente di ottenere una maggiore risoluzione di misura.
• Esistono diverse tipologie di circuiti che permettono di decodifi-care le tensioni sui circuiti secondari in un valore digitale della posizione angolare (RDC, Resolver to Digital Converter).

Dinamo tachimetrica (1)
• La dinamo tachimetrica fornisce una tensione di uscita proporzionale alla velocità di rotazione dell’asse.
• Il principio di funzionamento è simile a quello del motore elettrico in continua: la parte mobile è costituita da un circuito elettrico solidale alla parte di cui occorre misurare la velocità.
• Il circuito elettrico è immerso in un campo magnetico fisso generato da un magnete permanente. Quando questo ruota si viene a generare una tensione proporzionale alla velocità di rotazione del sensore.
Vout

Dinamo tachimetrica (2)
Pregi e difetti• La dinamo tachimetrica è un sensore economico, fornisce una
informazione assoluta e non necessita di una tensione di alimen-tazione.
• La tensione d'uscita è alterata da una ondulazione la cui fre-quenza dipende dalla velocità di rotazione (e non può quindi es-sere agevolmente eliminata con un filtro).
• La dinamo tachimetrica ha una scarsa risoluzione a basse veloci-tà.
• Inoltre, alto valore della coppia d'attrito; vibrazioni alle alte ve-locità; generazione di rumori ad alta frequenza dovuti alla com-mutazione; momento d'inerzia del rotore piuttosto elevato.
• La presenza di spazzole striscianti sul circuito elettrico, necessa-rie per prelevare il segnale, ne riduce l'affidabilità e allo stesso tempo peggiora la qualità del segnale di uscita.
Potenziometro (1)
• Il principio di funzionamento è basato sulla variazione di resistenza in un circuito elettrico determinata dallo spostamento o rotazione dell'oggetto di cui si vuole misurare la posizione.
• Il potenziometro è un sensore di tipo assoluto ed e disponibile sia in versione rotativa che lineare.
• È un dispositivo in cui un cursore mobile e libero di scorrere sudi un resistore fisso (realizzato a filo o avvolto a film).
• La resistenza misurata fra il cursore ed un capo della resistenza fissa dipende dalla posizione del primo.
• Il potenziometro è un sensore “modulante", in quanto per ricavare una informazione elettrica utile occorre inserirlo in un circuito in cui sia presente una sorgente di alimentazione ausiliaria.

Potenziometro (2)
Un esempio di potenziometro lineare.
kxVLxV
RRV inin
xout ===
+
+
- -
R
Rx
Vin
Vout
i
cursore
L
x

Potenziometro (3)
Un esempio di potenziometro circolare.
απαα kVV
RRV ininout ===
2
+
-
Vin
+
-
Vout
α
i

Sensori di deformazione, forza e pressione
• Estensimetro. L'estensimetro, detto anche strain gauge, èun sensore che rileva deformazioni meccaniche trasformandole in variazioni di resistività.
• Cella di carico (load cell). È un sensore per la misura della forza peso. La forza applicata alla piattaforma comprime la molla e sposta l'equipaggio mobile del LVDT, che fornisce un'uscita proporzionale allo spostamento e quindi alla forza.

Sensori di temperatura
• Termocoppia. Il principio di funzionamento si basa sull‘effetto Seebeck: quando una giunzione tra due metalli viene riscaldata si genera una differenza di potenziale che, per piccole differenze di temperatura, è approssimativamente lineare.
• Termoresistenza. Le termoresistenze, anche chiamate RTD (Resistence Thermal Detector), sono dispositivi in cui il valore di resistività varia al variare della temperatura secondo una legge approssimativamente lineare.
• Termistore. L'elemento sensibile è un materiale semicondutto-re nel quale la resistenza varia negativamente al variare della temperatura con legge esponenziale.

Sensori di visione artificiale (1)
Sistema di visione stereoscopico

ACQUISITION
MAP BUILDING
Sensori di visione artificiale (2)

The original scene
Elevation map
Truthfulness map
VRML map 1
VRML map 2
Sensori di visione artificiale (3)
Primo esempio

Sensori di visione artificiale (4)
Secondo esempio

Confronto tra famiglie di sensori
Confronto tra il costo, l’accuratezza e il massimo range misurabile.

Motore in corrente continua (1)
Introduzione• Un motore in corrente continua a magneti permanenti è
costituito da una carcassa matallica fissa all'interno della quale è presente un campo magnetico generato, nei motori piùpiccoli, da magneti permanenti; nei motori di dimensioni piùgrosse è invece presente un avvolgimento percorso da corrente.
• Il rotore (o armatura) è costituito da una serie di spire solidali con l'albero rotante; il collegamento con l'alimentazione ècostituito da due spazzole striscianti (brush) costituite da cilindri in carbone o contatti in metallo che strisciano sul alcuni contatti elettrici ricavati nell'albero (il collettore).

Motore in corrente continua (2)
Principio di funzionamentoEsempio semplice con due sole spirea) Il rotore è orientato in modo che i
poli abbiano lo stesso segno e si respingono.
b) I poli di segno opposto si attrag-gono, si raggiunge quindi l’equili-brio.
c) Se il rotore è costituito da elettro-magneti, è possibile, invertendo il verso della corrente di spira, in-vertirne la polarità, e la rotazione riprende. I contatti striscianti per-mettono tale commutazione.

Motore in corrente continua (3)
I pregi dei motori DC• Hanno un elevato rapporto potenza/peso.• Sono facili da regolare, sia come velocità che come coppia.• Hanno un'elevata coppia di spunto.
I difetti dei motori DC• Le spazzole sono oggetti particolarmente fragili ed inaffidabili
nel lungo periodo.• La commutazione meccanica delle spazzole causa picchi di
tensione elevata che mettono a dura prova l'elettronica ed aumentano le emissioni elettromagnetiche.
• Le spazzole limitano la massima velocità a poche migliaia di giri al minuto.
• La coppia di inerzia è relativamente elevata (anche se compara-bile a quella di altri motori "tradizionali").

Motore in corrente continua (4)
Equazioni della parte elettricaIl circuito equivalente di un motore in continua è costituito da una resistenza (qualche Ω), da un induttore (mH, ininfluente a regime ma importante allo spunto) e da un generatore di tensione proporzionale alla velocità di rotazione. Abbiamo, quindi, le equa-zioni del circuito di armatura e della forza controelettromotrice E.
Inoltre, ω è la velocità angolare del rotore (e del suo carico), τ è la coppia che agisce sull’asse mentre kv e kc sono le costanti di velocità e di coppia del motore.
( ) ( ) ( ) ( )( ) ( )( ) ( )tikt
tktE
tEtidtdLtiRtV
c
v
aaa
==
++=
τω

Motore in corrente continua (5)
Equazioni della parte meccanicaLe equazioni che descrivono la parte meccanica del motore sono indipendenti dalla struttura della parte elettrica. dove ω è la velocità di rotazione del motore elettrico, F il coefficiente di attrito viscoso, J l'inerzia dell'apparato mobile del motore elettrico, e τluna coppia resistente esterna costituita dal carico meccanico del motore.
( ) ( ) ( ) ( )ttdtdJtFt lmm τωωτ ++=

Motore in corrente continua (6)
Equazioni nel dominio della frequenzaPassando alle trasformate di Laplace e considerando nulle le condi-zioni iniziali si ottengono le due equazioni accoppiate:
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )sssJFsiks
sksisLRsV
lmmc
vaaa
τωτω
++==++=

Motore in corrente continua (7)
Schema a blocchi del motore
Il motore in continua, di per sé, è già un sistema controreazionatodi tipo 0 e quindi stabile ! (proprietà di autostabilizzazione del motore in corrente continua)
aa sLR +1
ck
lτ-
+ mm sJF +1
vk
+-
aV i τ
s1 θω

Dispositivo didattico AMIRA
Motore in corrente continua
È composto da (a sinistra) una coppia motore in continua + dinamo tachimetrica, accoppiato con un secondo motore di carico (a destra) tramite un giunto (flessibile o rigido, a scelta).

Dispositivo didattico AMIRA
Motore in corrente continua
Parametri principali del sistema reale:
Momento di inerzia: 0.177 kg cm2
Coefficiente di attrito: 2.000 N cmResistenza di armatura: 2.600 ΩInduttanza d’armatura: 3.000 mHCostante di velocità kv: 6.270 mV / RpmCostante di coppia kc: 6.000 N cm / A





























