Embed Size (px)
Citation preview
Stéréo-photogrammétrie
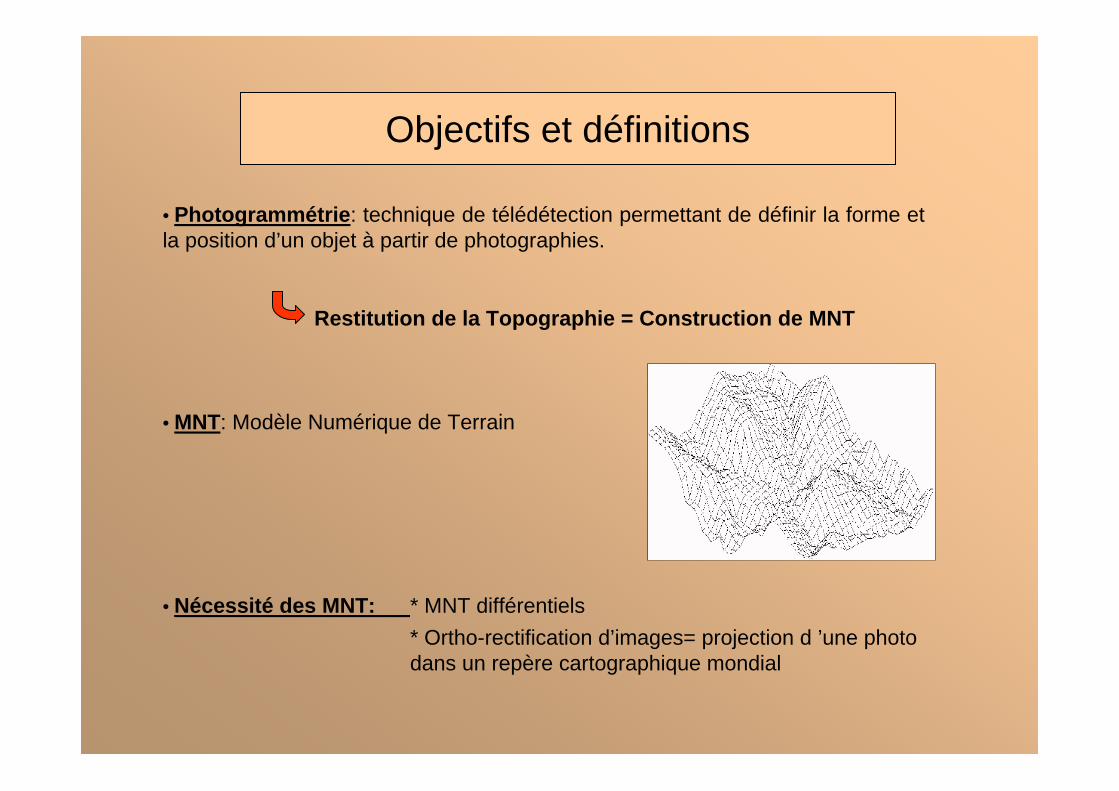
Objectifs et définitions
Restitution de la Topographie = Construction de MNT
• Photogrammétrie: technique de télédétection permettant de définir la forme et la position d’un objet à partir de photographies.
• MNT: Modèle Numérique de Terrain
• Nécessité des MNT: * MNT différentiels* Ortho-rectification d’images= projection d ’une photo dans un repère cartographique mondial
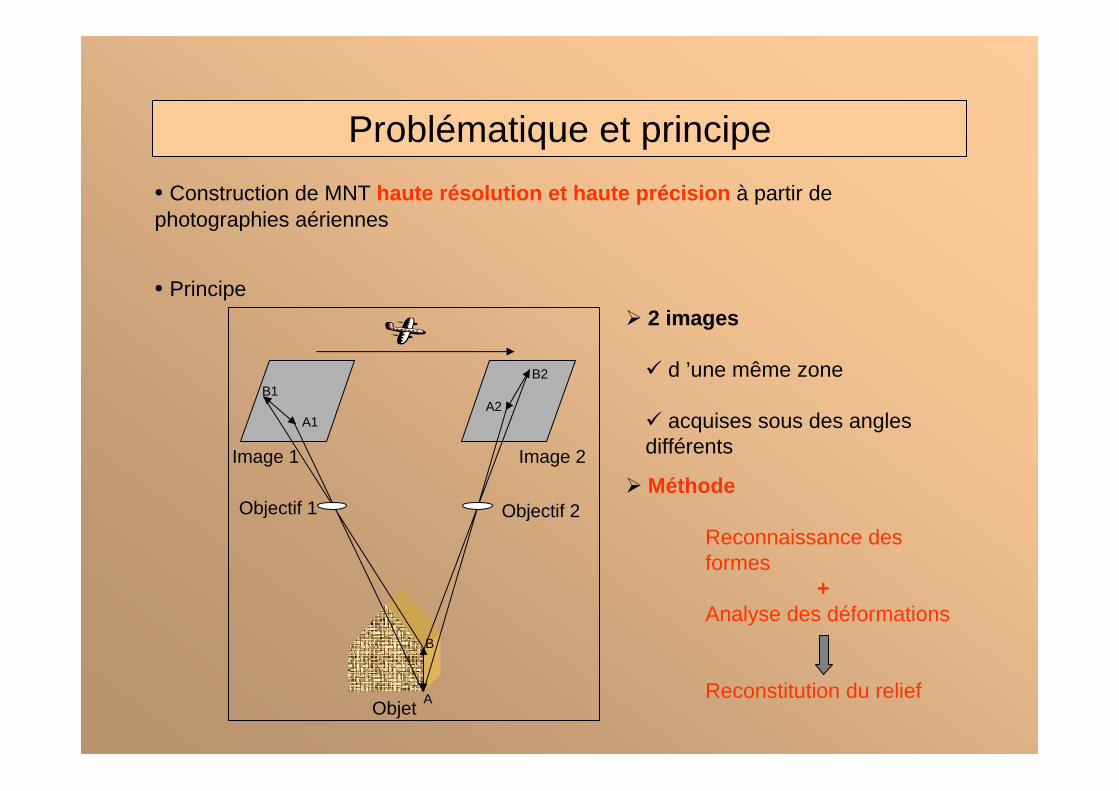
Problématique et principe• Construction de MNT haute résolution et haute précision à partir de photographies aériennes
B
Objet
Image 1 Image 2
Objectif 1 Objectif 2
A
A1A2
B1B2
2 images
d ’une même zone
acquises sous des angles différents
• Principe
Méthode
Reconnaissance des formes
+Analyse des déformations
Reconstitution du relief
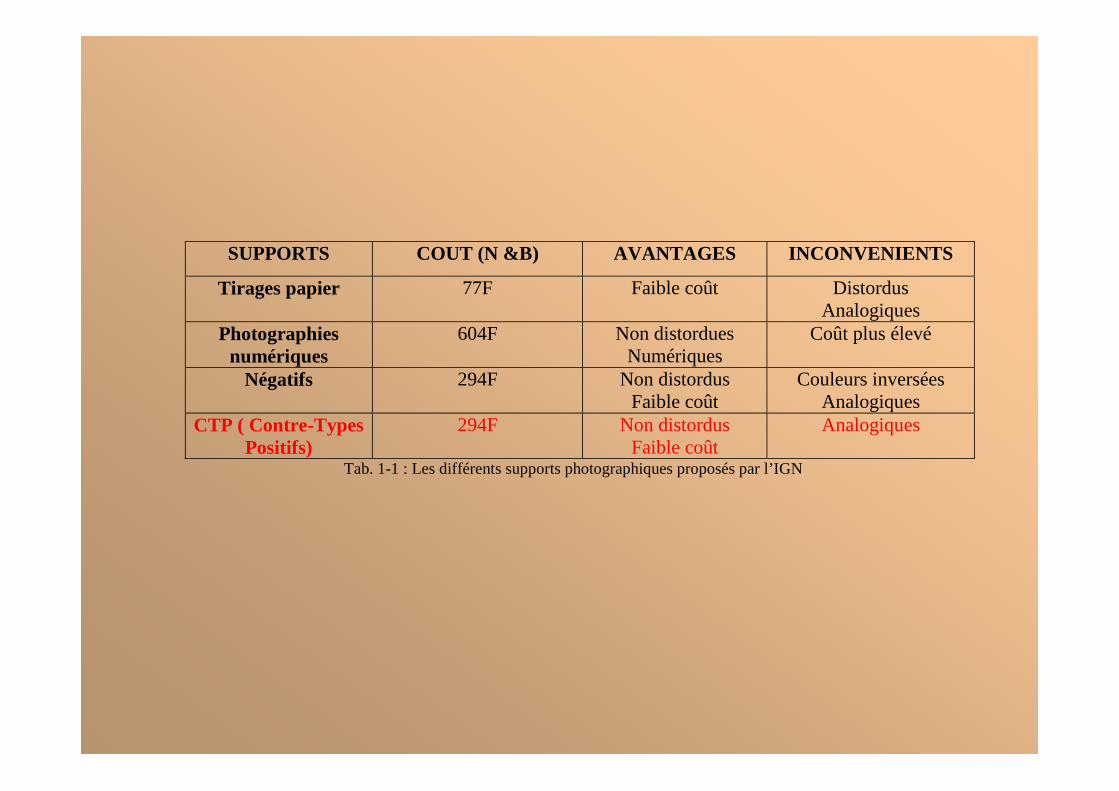
SUPPORTS COUT (N &B) AVANTAGES INCONVENIENTS
Tirages papier 77F Faible coût DistordusAnalogiques
Photographiesnumériques
604F Non distorduesNumériques
Coût plus élevé
Négatifs 294F Non distordusFaible coût
Couleurs inverséesAnalogiques
CTP ( Contre-TypesPositifs)
294F Non distordusFaible coût
Analogiques
Tab. 1-1 : Les différents supports photographiques proposés par l’IGN
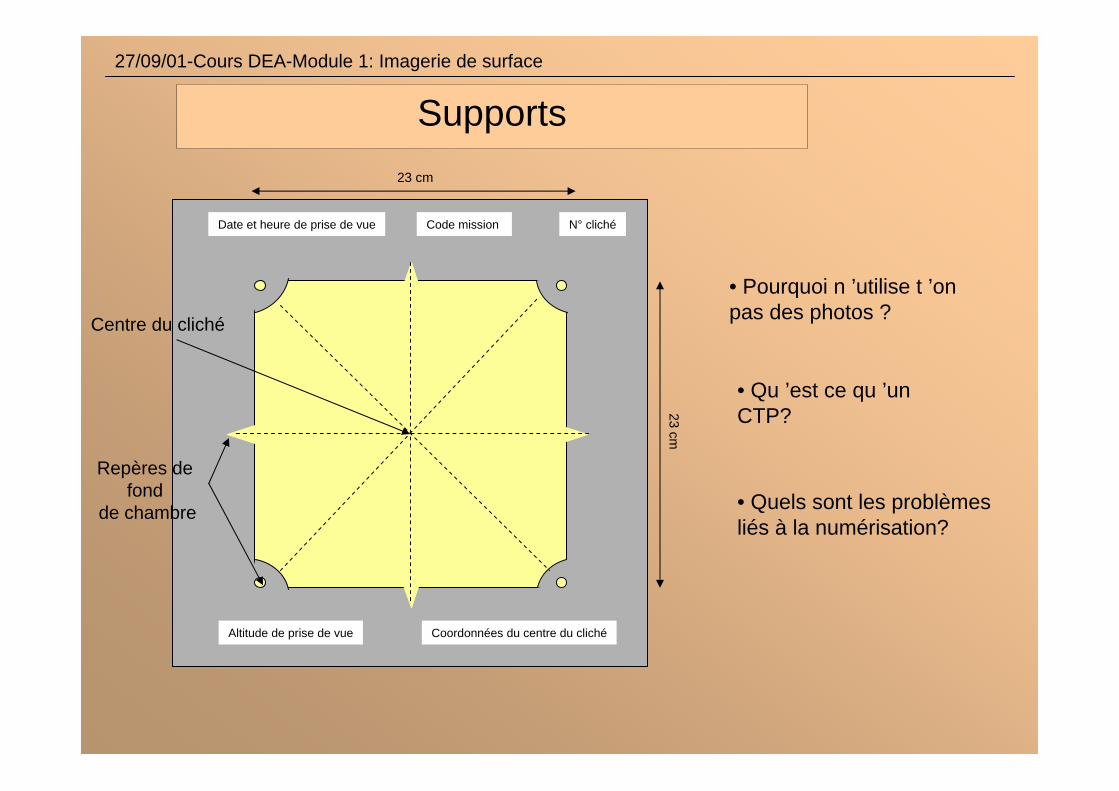
27/09/01-Cours DEA-Module 1: Imagerie de surface
Date et heure de prise de vue Code mission N° cliché
Altitude de prise de vue Coordonnées du centre du cliché
23 cm
23 cm
Centre du cliché
Repères de fond
de chambre
Supports
• Pourquoi n ’utilise t ’on pas des photos ?
• Qu ’est ce qu ’un CTP?
• Quels sont les problèmes liés à la numérisation?
27/09/01-Cours DEA-Module 1: Imagerie de surface
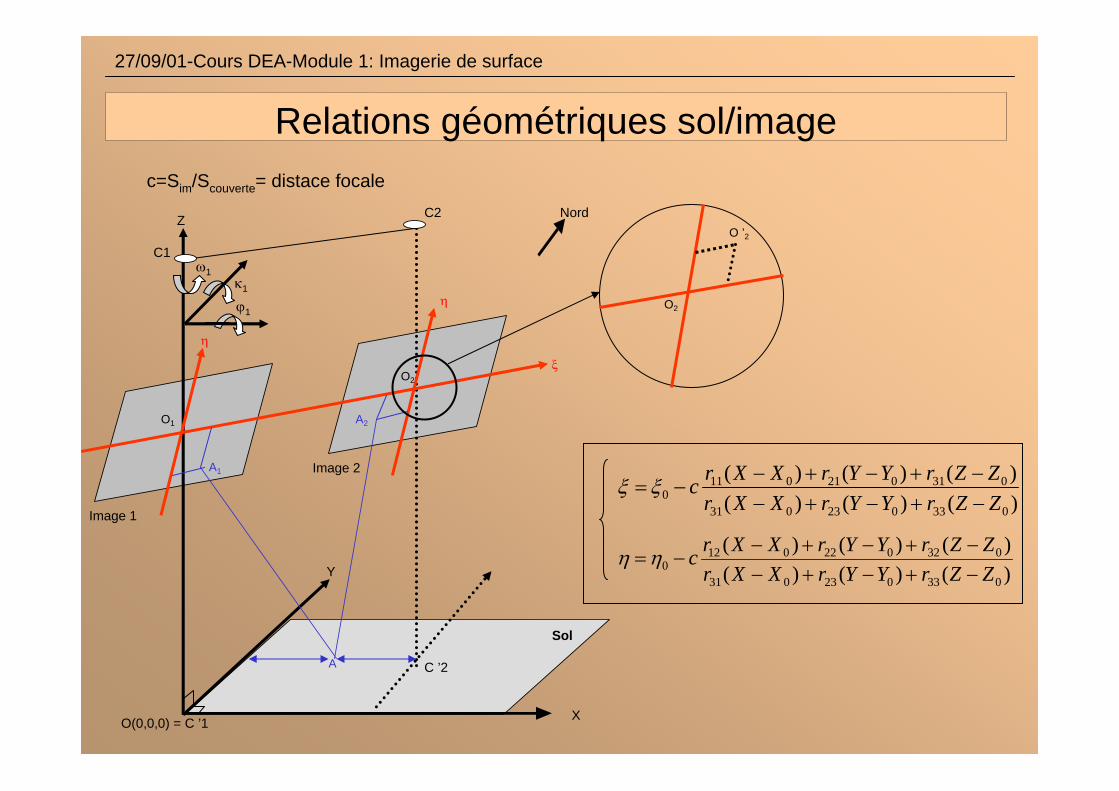
Relations géométriques sol/image
Sol
XO(0,0,0) = C ’1
Y
C1
C ’2
ξ
Nord
Image 1
Image 2
Z
η
C2
η
O1
A1
A2
A
ω1
ϕ1
κ1
O2
O2
O ’2
)()()()()()(
033023031
0310210110 ZZrYYrXXr
ZZrYYrXXrc−+−+−−+−+−
−= ξξ
)()()()()()(
033023031
0320220120 ZZrYYrXXr
ZZrYYrXXrc−+−+−−+−+−
−=ηη
c=Sim/Scouverte= distace focale
27/09/01-Cours DEA-Module 1: Imagerie de surface
crrrcrrrZZXX
33032031
1301201100 )()(
)()()(−−+−−−+−
−+=ηηξξηηξξ
crrrcrrrZZYY
33032031
2302202100 )()(
)()()(−−+−−−+−
−+=ηηξξηηξξ
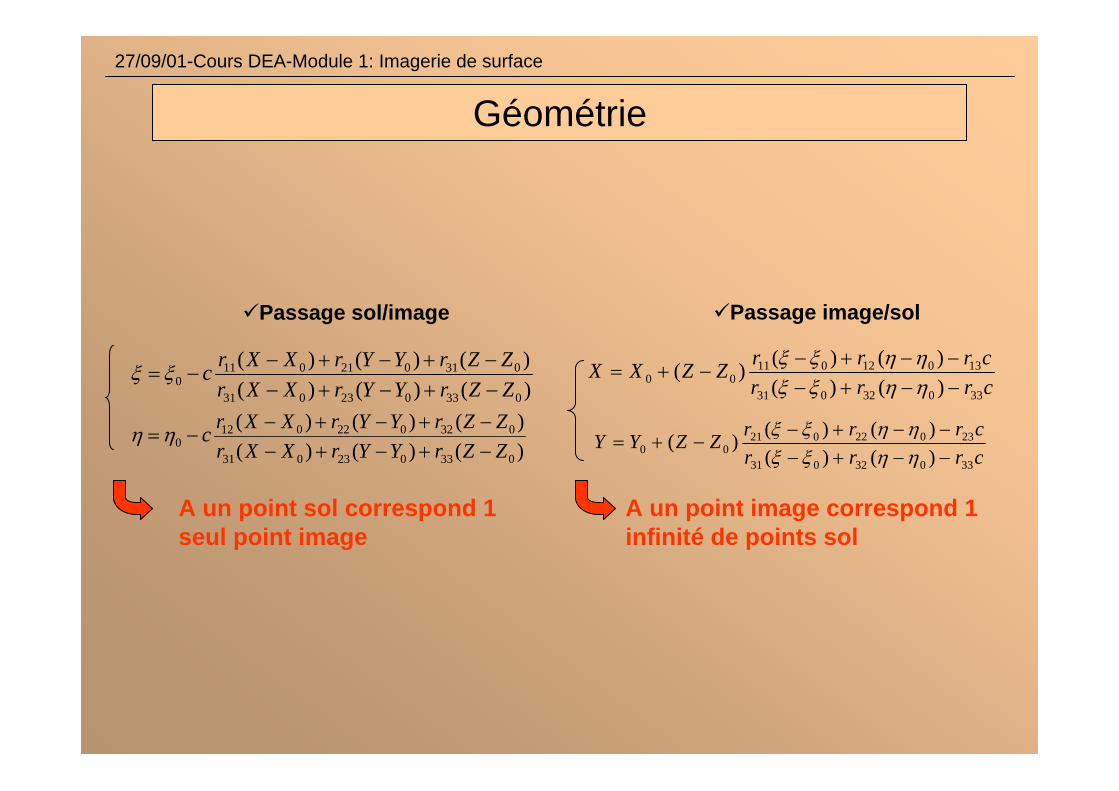
Passage image/sol
)()()()()()(
033023031
0310210110 ZZrYYrXXr
ZZrYYrXXrc−+−+−−+−+−
−= ξξ
)()()()()()(
033023031
0320220120 ZZrYYrXXr
ZZrYYrXXrc−+−+−−+−+−
−=ηη
Passage sol/image
A un point sol correspond 1 seul point image
A un point image correspond 1 infinité de points sol
Géométrie
27/09/01-Cours DEA-Module 1: Imagerie de surface
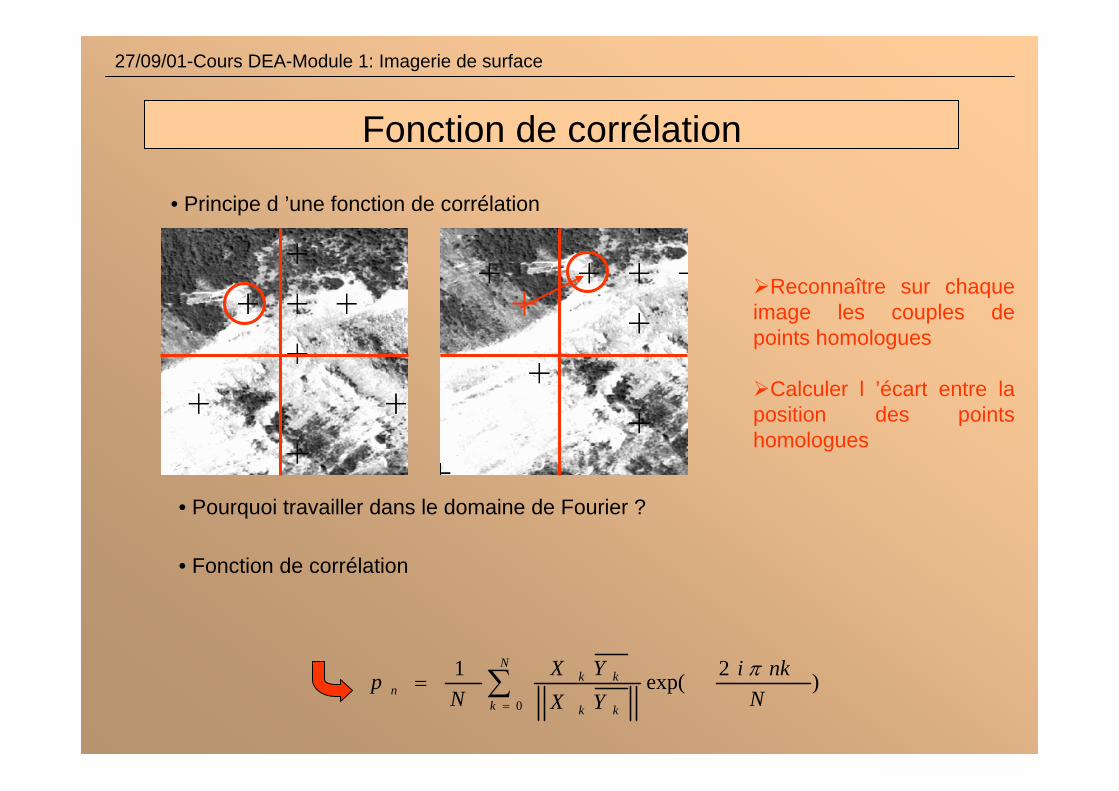
Fonction de corrélation
• Principe d ’une fonction de corrélation
Reconnaître sur chaque image les couples de points homologues
Calculer l ’écart entre la position des points homologues
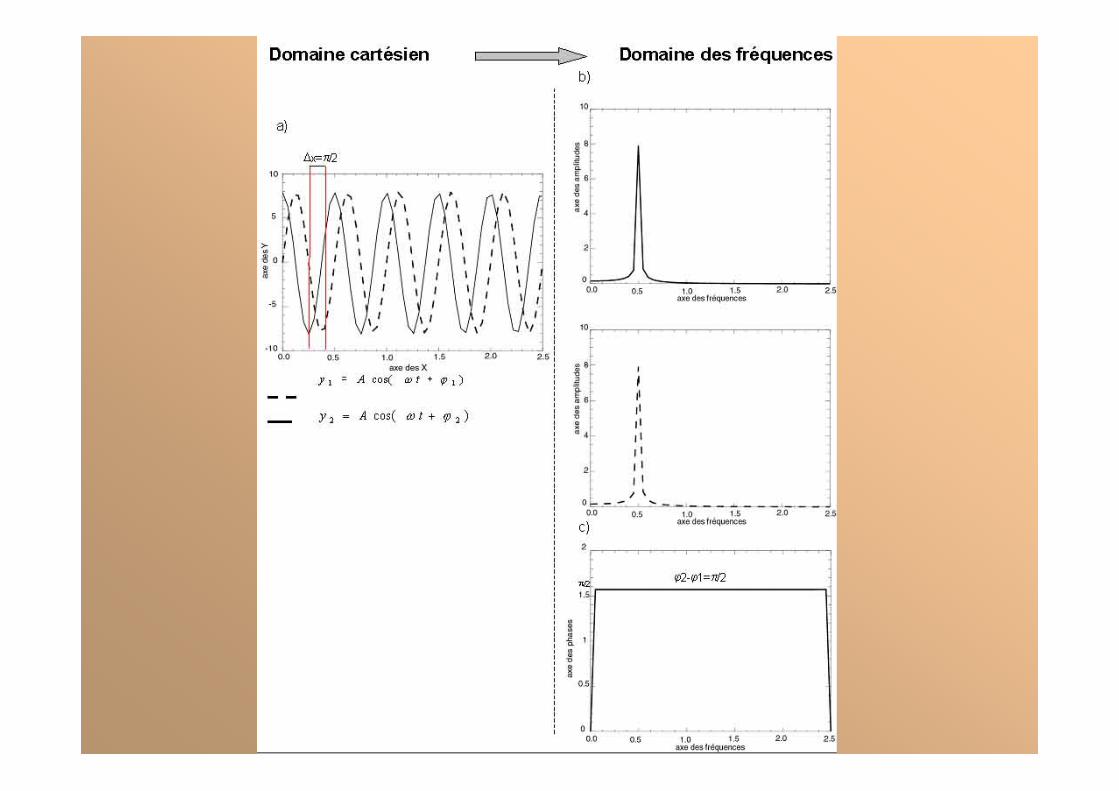
• Pourquoi travailler dans le domaine de Fourier ?
• Fonction de corrélation
)2exp(10 N
nkiYXYX
Np
N
k kk
kkn
π∑=
=
Pic de corrélation des images 1 et 2(dξ=0 et dη=0)
C
Image 1
ηp
Image 2= image 1
ξpξp
27/09/01-Cours DEA-Module 1: Imagerie de surface
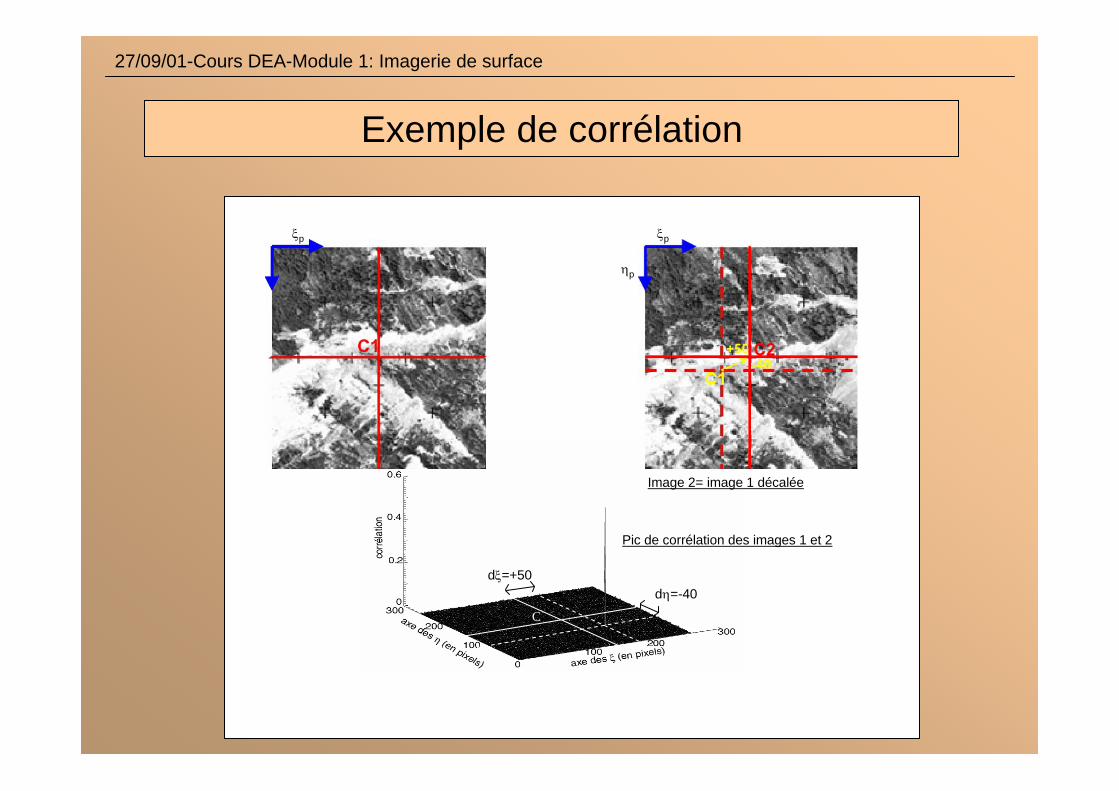
Exemple de corrélation
Pic de corrélation des images 1 et 2
dη=-40dξ=+50
C
ξp
ηp
Image 2= image 1 décalée
ξp
27/09/01-Cours DEA-Module 1: Imagerie de surface
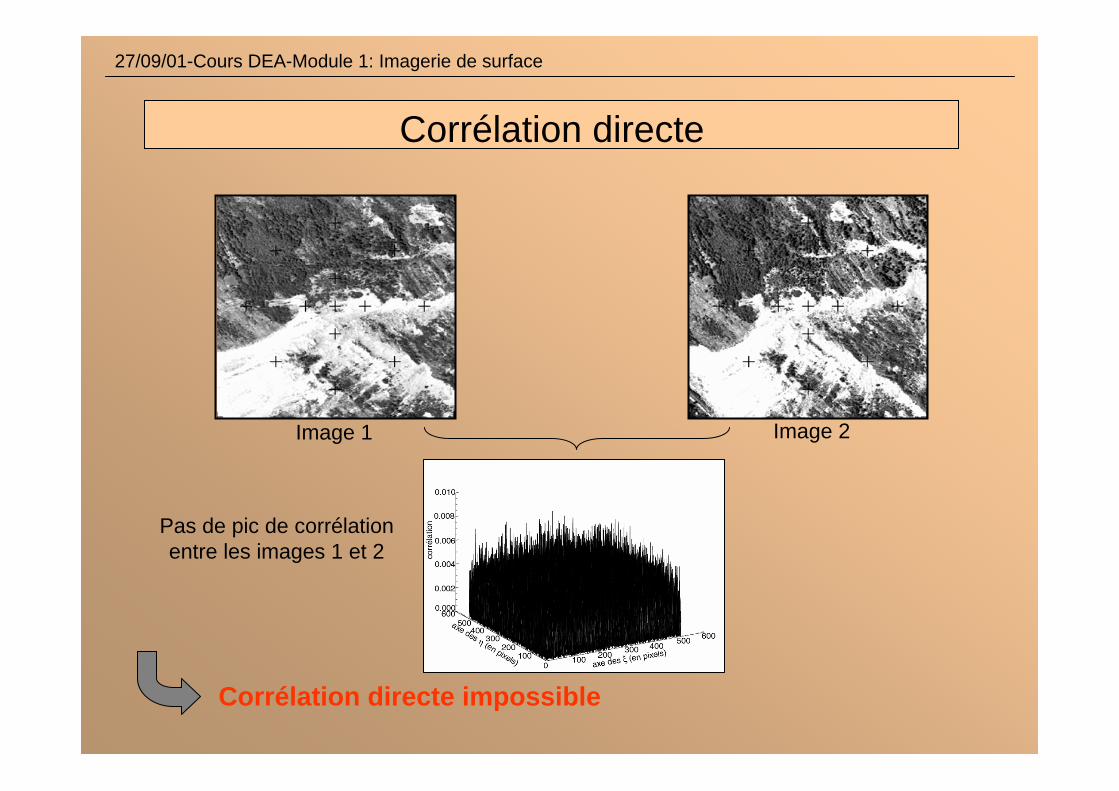
Corrélation directe
Corrélation directe impossible
Image 1 Image 2
Pas de pic de corrélation entre les images 1 et 2
27/09/01-Cours DEA-Module 1: Imagerie de surface
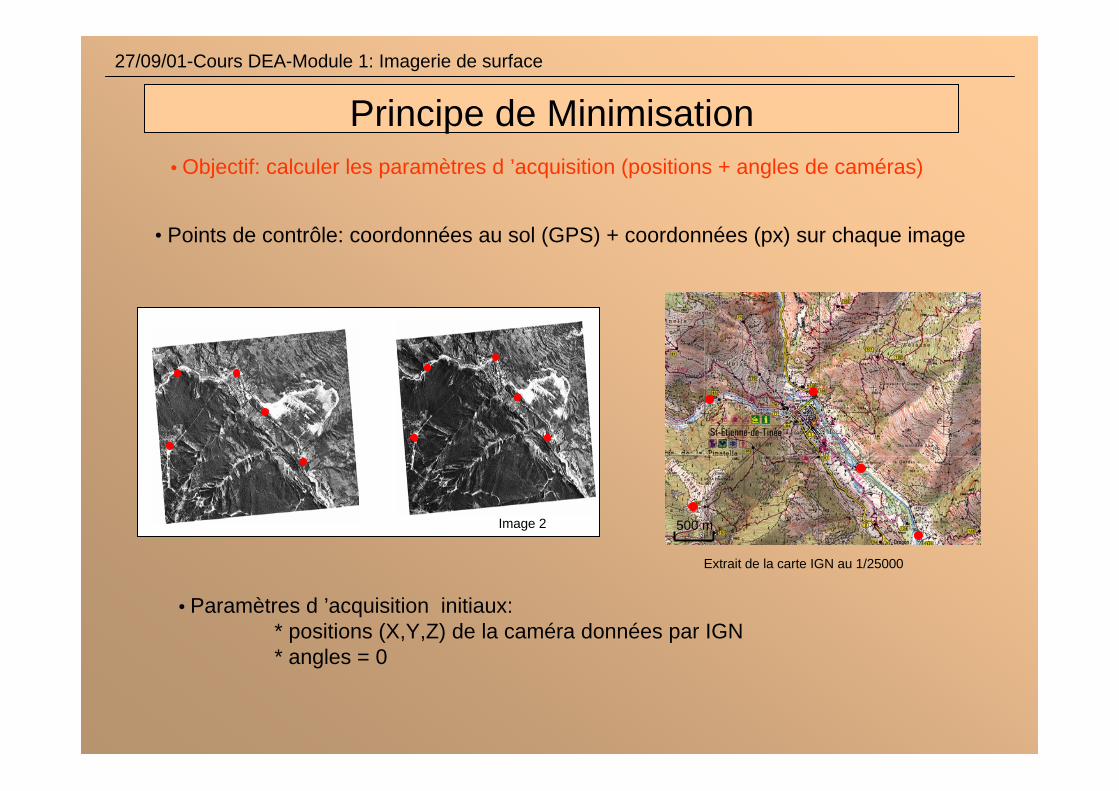
Principe de Minimisation• Objectif: calculer les paramètres d ’acquisition (positions + angles de caméras)
• Points de contrôle: coordonnées au sol (GPS) + coordonnées (px) sur chaque image
Image 2
Image 1
Extrait de la carte IGN au 1/25000
500 m
• Paramètres d ’acquisition initiaux: * positions (X,Y,Z) de la caméra données par IGN* angles = 0
27/09/01-Cours DEA-Module 1: Imagerie de surface
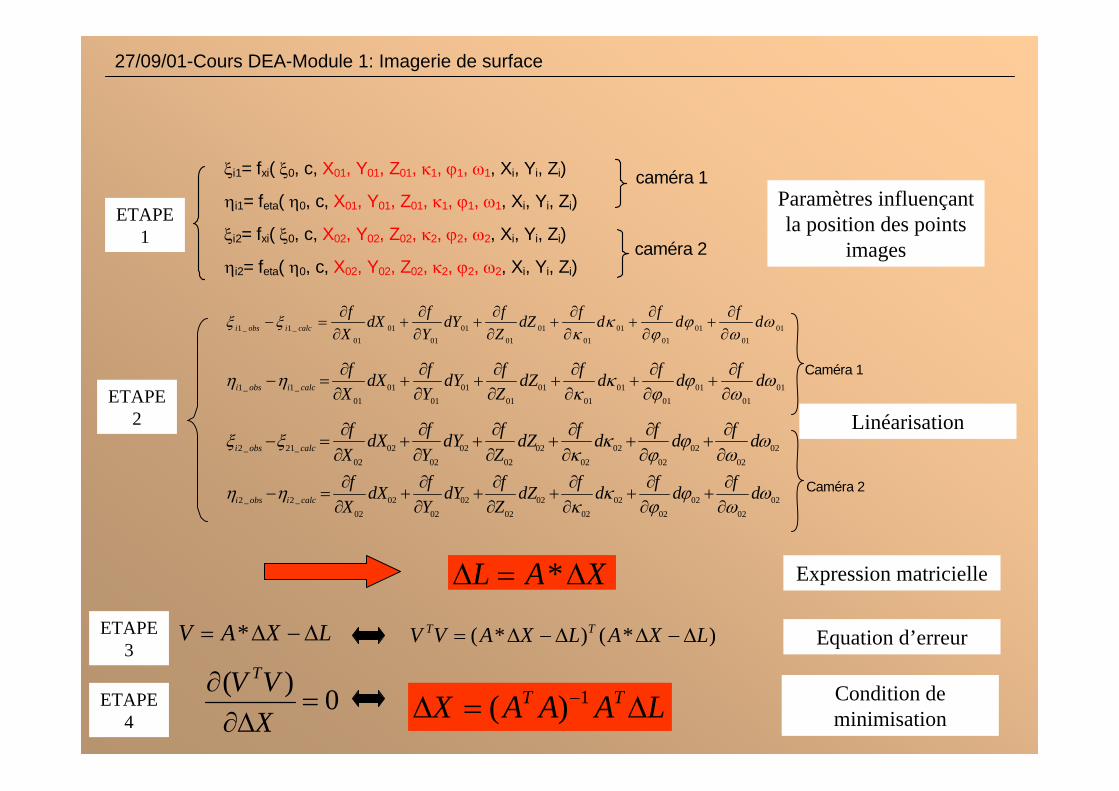
XAL Δ=Δ * Expression matricielle
ξi1= fxi( ξ0, c, X01, Y01, Z01, κ1, ϕ1, ω1, Xi, Yi, Zi)
ηi1= feta( η0, c, X01, Y01, Z01, κ1, ϕ1, ω1, Xi, Yi, Zi)
ξi2= fxi( ξ0, c, X02, Y02, Z02, κ2, ϕ2, ω2, Xi, Yi, Zi)
ηi2= feta( η0, c, X02, Y02, Z02, κ2, ϕ2, ω2, Xi, Yi, Zi)
(9)caméra 1
caméra 2
Paramètres influençant la position des points
images
ETAPE 1
0101
0101
0101
0101
0101
0101
_1_1 ωω
ϕϕ
κκ
ξξ dfdfdfdZZfdY
YfdX
Xf
calciobsi ∂∂
+∂∂
+∂∂
+∂∂
+∂∂
+∂∂
=−
0101
0101
0101
0101
0101
0101
_1_1 ωω
ϕϕ
κκ
ηη dfdfdfdZZfdY
YfdX
Xf
calciobsi ∂∂
+∂∂
+∂∂
+∂∂
+∂∂
+∂∂
=−
0202
0202
0202
0202
0202
0202
_21_2 ωω
ϕϕ
κκ
ξξ dfdfdfdZZfdY
YfdX
Xf
calcobsi ∂∂
+∂∂
+∂∂
+∂∂
+∂∂
+∂∂
=−
0202
0202
0202
0202
0202
0202
_2_2 ωω
ϕϕ
κκ
ηη dfdfdfdZZfdY
YfdX
Xf
calciobsi ∂∂
+∂∂
+∂∂
+∂∂
+∂∂
+∂∂
=−
(10)
Caméra 1
Caméra 2
LinéarisationETAPE
2
LXAV Δ−Δ= * )*()*( LXALXAVV TT Δ−ΔΔ−Δ= Equation d’erreurETAPE 3
0)(=
Δ∂∂
XVV T
LAAAX TT Δ=Δ −1)(ETAPE 4
Condition de minimisation
Correction des paramètres initiaux: val0+ΔX
27/09/01-Cours DEA-Module 1: Imagerie de surface
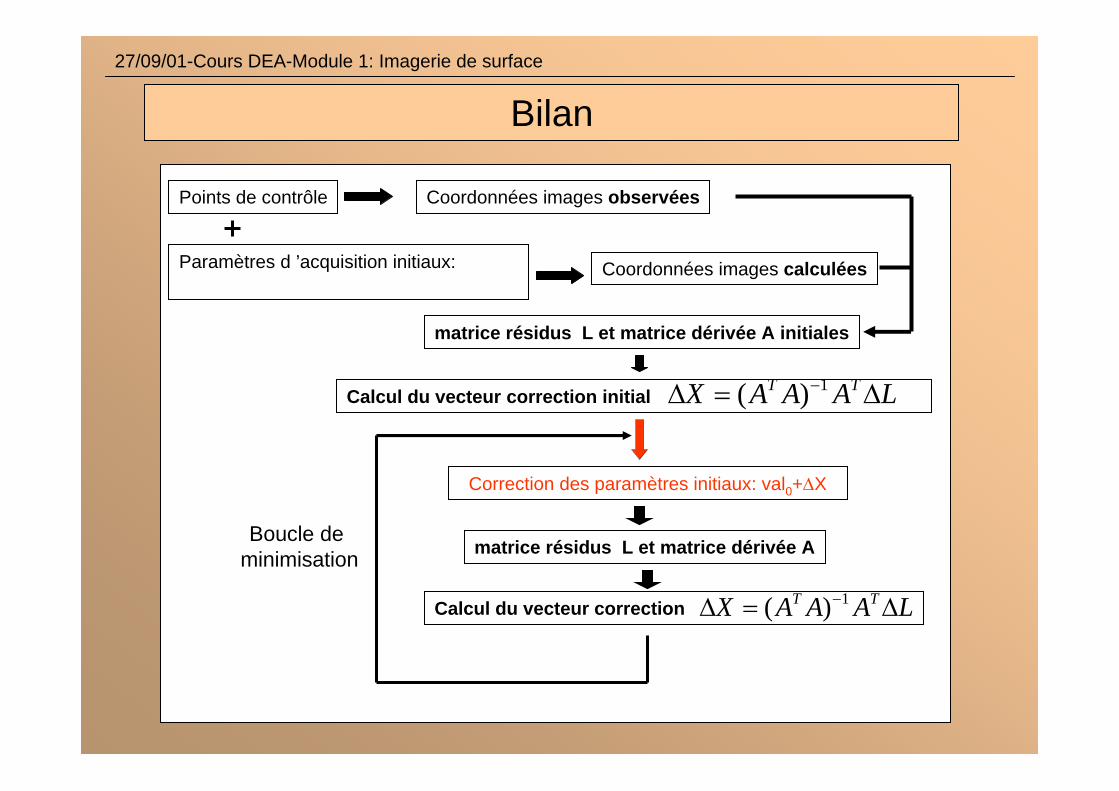
Bilan
Paramètres d ’acquisition initiaux:
Points de contrôle Coordonnées images observées
Coordonnées images calculées
matrice résidus L et matrice dérivée A initiales
Calcul du vecteur correction initial LAAAX TT Δ=Δ −1)(
matrice résidus L et matrice dérivée A
Calcul du vecteur correction LAAAX TT Δ=Δ −1)(
Boucle deminimisation







![Cours Télédétection 3ème année [Mode de compatibilité] · Cours de Télédétection Hamouda SAMAALI Année universitaire 2015-2016 ... 2,0 2,5 1,5 1,0 0,5 0,0 O3 O3 Eclairement](https://img.pdfslide.tips/doc/110x75/5fd22566bde5e30ea55ebeee/cours-tldtection-3me-anne-mode-de-compatibilit-cours-de-tldtection.jpg)




















