Embed Size (px)
Citation preview
2
CAPÍTULO I
EL MODELO CIM Y JERARQUÍA DE REDES DE COMUNICACIÓN EN LA
INDUSTRIA
1.1 Introducción
En la industria moderna se utilizan diferentes redes de comunicación de acuerdo a
diferentes niveles de automatización. Estos niveles son definidos por el modelo denominado
Computer Integrated Manufacturing, o CIM, que puede traducirse al español como Manufactura
Integrada por Computadora, por el cual se determina una jerarquización de las redes según el
propósito para el que han sido diseñadas y aplicadas. En este capítulo se establecen los conceptos
de este modelo y de la jerarquización de comunicaciones industriales que se derivan de éste, los
que servirán de base para posicionar los buses de campo DeviceNet y ControlNet en el entorno
industrial.
1.2 Modelo de Automatización CIM
Dada las exigencias de los procesos productivos, estos se han estructurado de manera de
hacerlos más eficientes. De este modo, se utilizan modelos jerárquicos para la implantación de
sistemas automatizados, siendo CIM uno de los modelos más difundidos en la actualidad.
1.2.1 Objetivos de CIM
CIM es un modelo de automatización jerárquico que busca incrementar la eficiencia de
todos los componentes de la empresa, relacionados con la producción, definiendo los siguientes
objetivos:
2
3
• Aumentar la flexibilidad.
• Mejorar la calidad del producto.
• Reducir los costos.
• Reducir el tiempo y el número de pasos empleados en la fabricación.
• Aumentar la confiabilidad del sistema.
1.2.2 Concepto de CIM
CIM se refiere a la manufactura automatizada, al transporte automatizado de piezas y
materiales, usando las tecnologías computarizadas en todas las etapas de producción de un
producto, desde el diseño a la fabricación y el control de calidad.
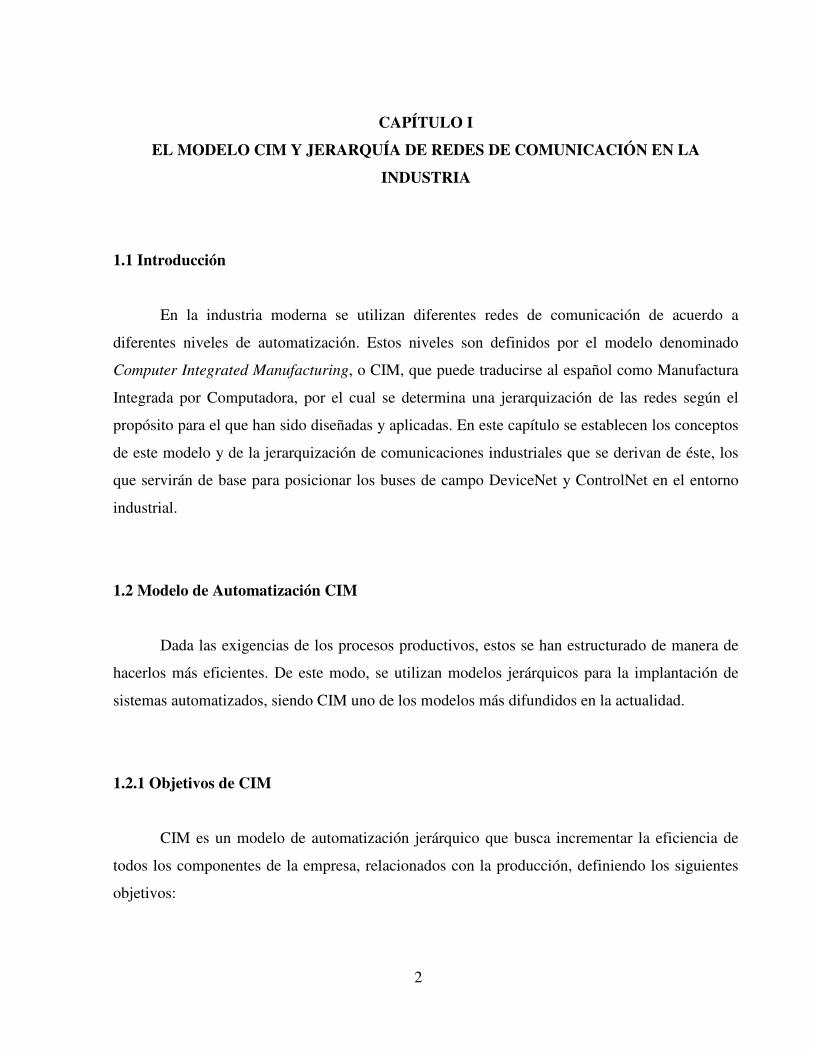
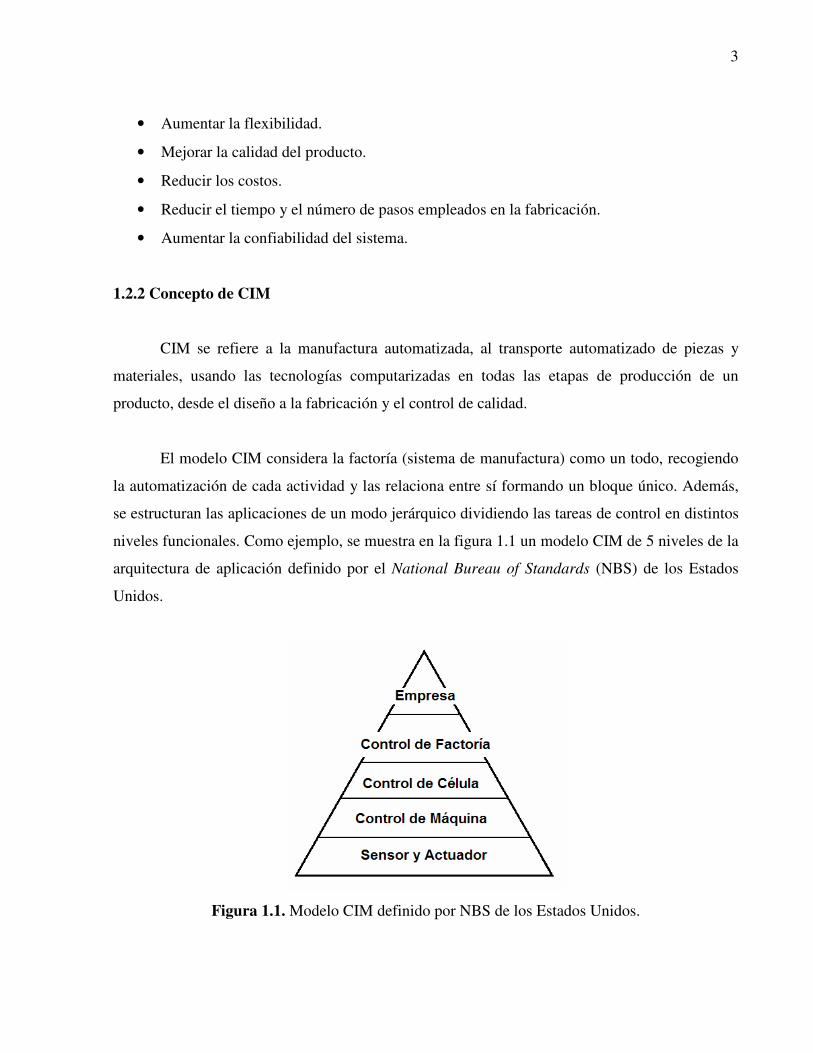
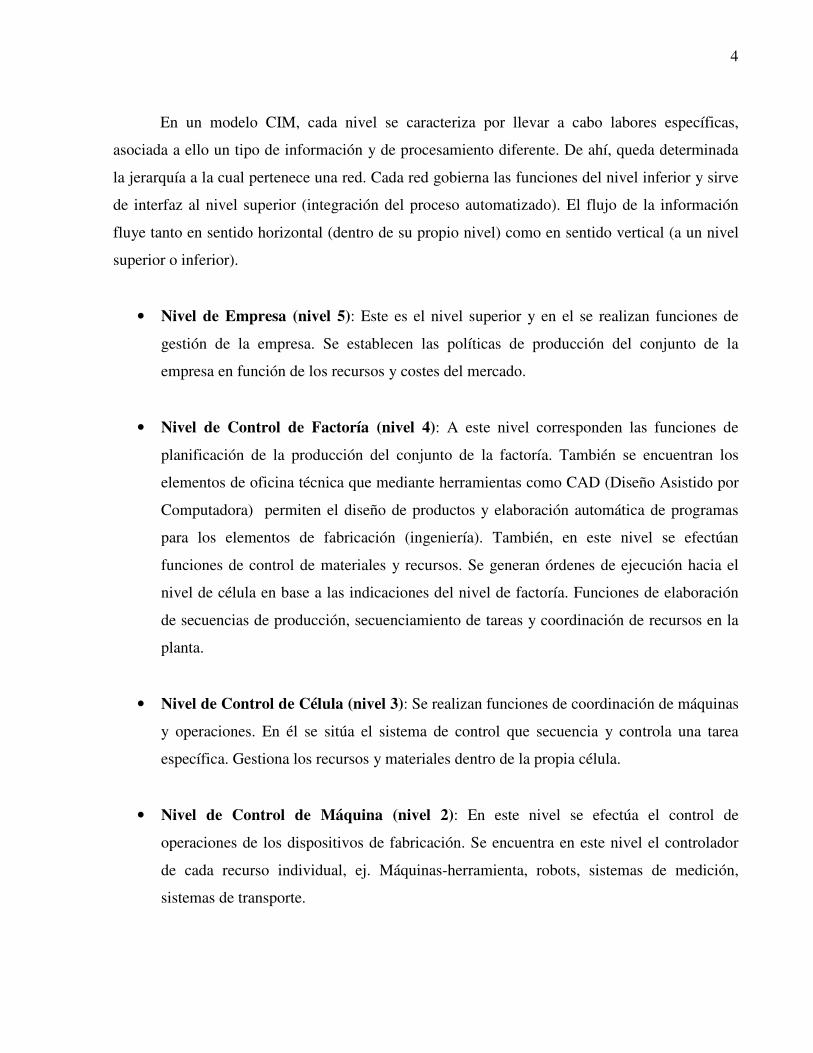
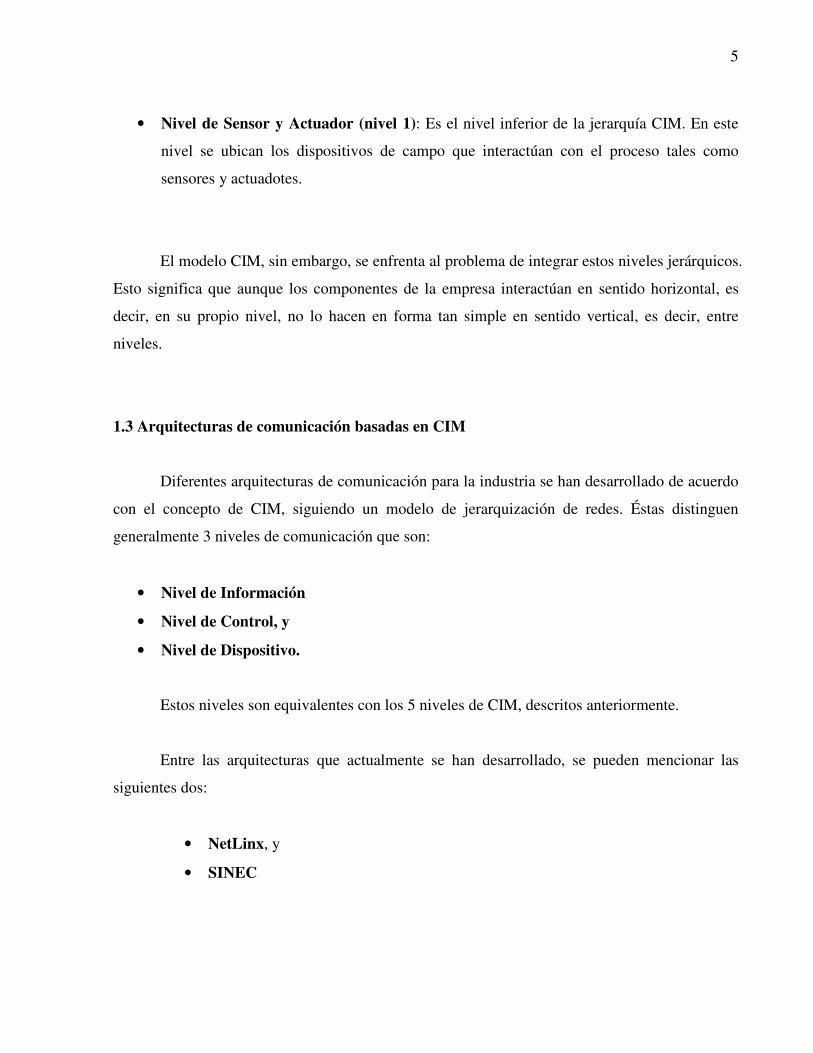
El modelo CIM considera la factoría (sistema de manufactura) como un todo, recogiendo
la automatización de cada actividad y las relaciona entre sí formando un bloque único. Además,
se estructuran las aplicaciones de un modo jerárquico dividiendo las tareas de control en distintos
niveles funcionales. Como ejemplo, se muestra en la figura 1.1 un modelo CIM de 5 niveles de la
arquitectura de aplicación definido por el National Bureau of Standards (NBS) de los Estados
Unidos.
Figura 1.1. Modelo CIM definido por NBS de los Estados Unidos.
4
En un modelo CIM, cada nivel se caracteriza por llevar a cabo labores específicas,
asociada a ello un tipo de información y de procesamiento diferente. De ahí, queda determinada
la jerarquía a la cual pertenece una red. Cada red gobierna las funciones del nivel inferior y sirve
de interfaz al nivel superior (integración del proceso automatizado). El flujo de la información
fluye tanto en sentido horizontal (dentro de su propio nivel) como en sentido vertical (a un nivel
superior o inferior).
• Nivel de Empresa (nivel 5): Este es el nivel superior y en el se realizan funciones de
gestión de la empresa. Se establecen las políticas de producción del conjunto de la
empresa en función de los recursos y costes del mercado.
• Nivel de Control de Factoría (nivel 4): A este nivel corresponden las funciones de
planificación de la producción del conjunto de la factoría. También se encuentran los
elementos de oficina técnica que mediante herramientas como CAD (Diseño Asistido por
Computadora) permiten el diseño de productos y elaboración automática de programas
para los elementos de fabricación (ingeniería). También, en este nivel se efectúan
funciones de control de materiales y recursos. Se generan órdenes de ejecución hacia el
nivel de célula en base a las indicaciones del nivel de factoría. Funciones de elaboración
de secuencias de producción, secuenciamiento de tareas y coordinación de recursos en la
planta.
• Nivel de Control de Célula (nivel 3): Se realizan funciones de coordinación de máquinas
y operaciones. En él se sitúa el sistema de control que secuencia y controla una tarea
específica. Gestiona los recursos y materiales dentro de la propia célula.
• Nivel de Control de Máquina (nivel 2): En este nivel se efectúa el control de
operaciones de los dispositivos de fabricación. Se encuentra en este nivel el controlador
de cada recurso individual, ej. Máquinas-herramienta, robots, sistemas de medición,
sistemas de transporte.
5
• Nivel de Sensor y Actuador (nivel 1): Es el nivel inferior de la jerarquía CIM. En este
nivel se ubican los dispositivos de campo que interactúan con el proceso tales como
sensores y actuadotes.
El modelo CIM, sin embargo, se enfrenta al problema de integrar estos niveles jerárquicos.
Esto significa que aunque los componentes de la empresa interactúan en sentido horizontal, es
decir, en su propio nivel, no lo hacen en forma tan simple en sentido vertical, es decir, entre
niveles.
1.3 Arquitecturas de comunicación basadas en CIM
Diferentes arquitecturas de comunicación para la industria se han desarrollado de acuerdo
con el concepto de CIM, siguiendo un modelo de jerarquización de redes. Éstas distinguen
generalmente 3 niveles de comunicación que son:
• Nivel de Información
• Nivel de Control, y
• Nivel de Dispositivo.
Estos niveles son equivalentes con los 5 niveles de CIM, descritos anteriormente.
Entre las arquitecturas que actualmente se han desarrollado, se pueden mencionar las
siguientes dos:
• NetLinx, y
• SINEC
6
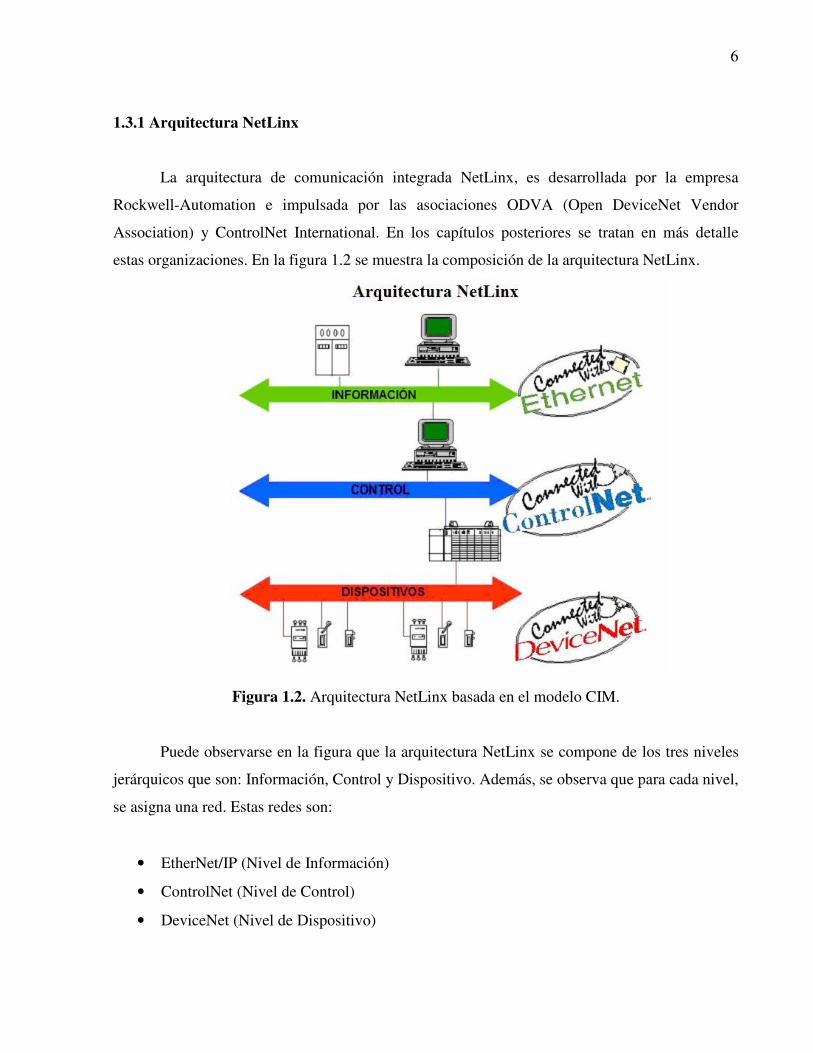
1.3.1 Arquitectura NetLinx
La arquitectura de comunicación integrada NetLinx, es desarrollada por la empresa
Rockwell-Automation e impulsada por las asociaciones ODVA (Open DeviceNet Vendor
Association) y ControlNet International. En los capítulos posteriores se tratan en más detalle
estas organizaciones. En la figura 1.2 se muestra la composición de la arquitectura NetLinx.
Figura 1.2. Arquitectura NetLinx basada en el modelo CIM.
Puede observarse en la figura que la arquitectura NetLinx se compone de los tres niveles
jerárquicos que son: Información, Control y Dispositivo. Además, se observa que para cada nivel,
se asigna una red. Estas redes son:
• EtherNet/IP (Nivel de Información)
• ControlNet (Nivel de Control)
• DeviceNet (Nivel de Dispositivo)
7
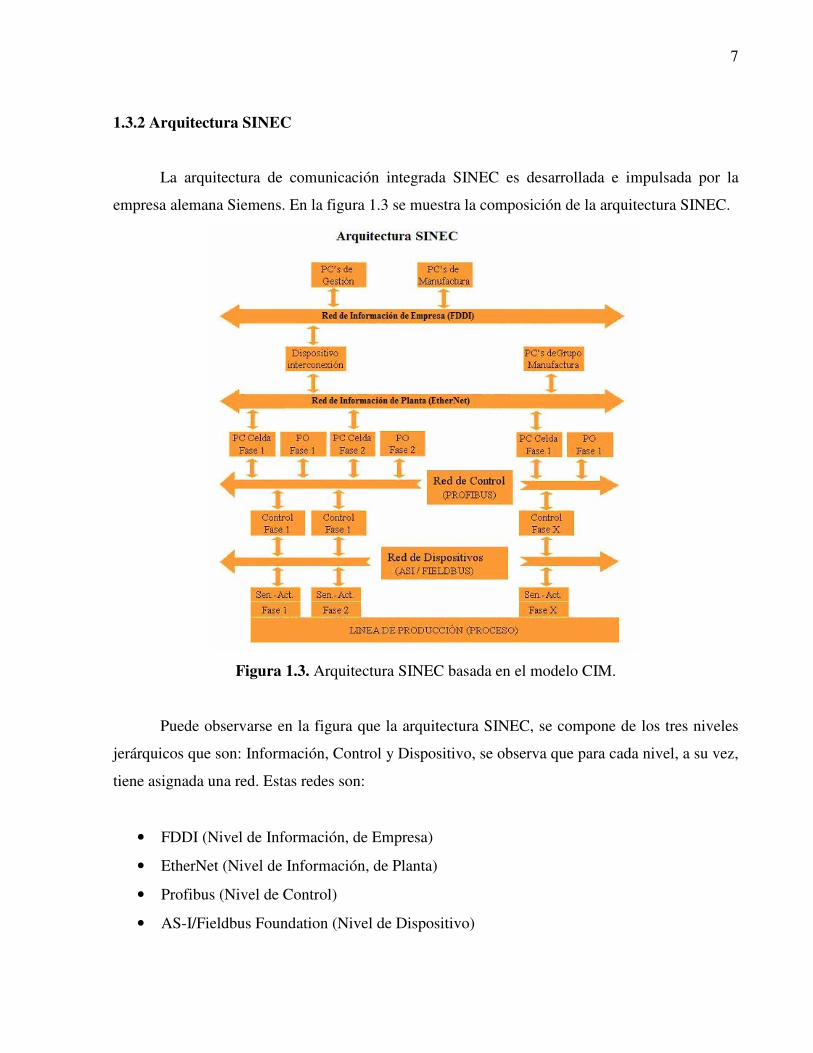
1.3.2 Arquitectura SINEC
La arquitectura de comunicación integrada SINEC es desarrollada e impulsada por la
empresa alemana Siemens. En la figura 1.3 se muestra la composición de la arquitectura SINEC.
Figura 1.3. Arquitectura SINEC basada en el modelo CIM.
Puede observarse en la figura que la arquitectura SINEC, se compone de los tres niveles
jerárquicos que son: Información, Control y Dispositivo, se observa que para cada nivel, a su vez,
tiene asignada una red. Estas redes son:
• FDDI (Nivel de Información, de Empresa)
• EtherNet (Nivel de Información, de Planta)
• Profibus (Nivel de Control)
• AS-I/Fieldbus Foundation (Nivel de Dispositivo)
8
1.4 Jerarquía de redes de comunicación según el modelo CIM
Debido a los distintos requerimientos que poseen los niveles del modelo CIM, cada red de
comunicación está optimizada para operar dentro de un determinado rango en el modelo. Al
trabajar fuera del nivel para el cual están diseñadas, disminuye su rendimiento y aumenta la
relación costo/prestación.
Tal como se pudo observar en las arquitecturas de comunicación comerciales basadas en
el concepto de CIM, a cada nivel le corresponde una red con determinadas propiedades y
limitaciones.
De esta forma aparece la jerarquización de las redes de comunicación en la industria.
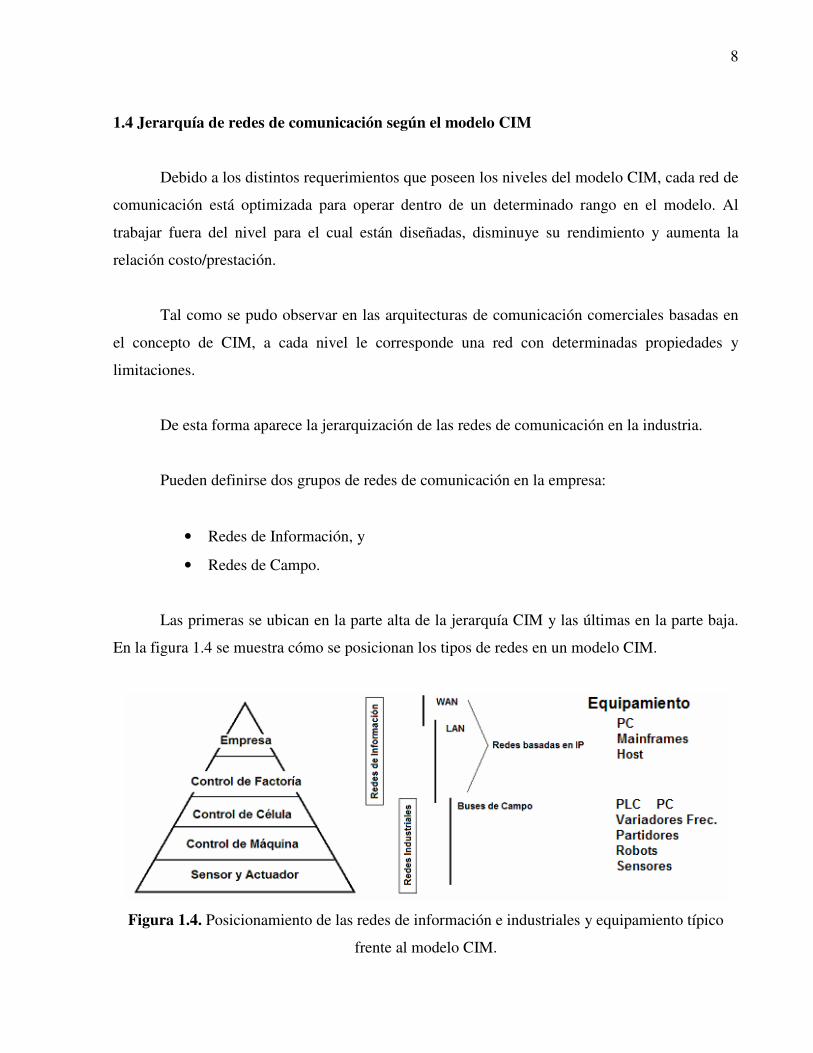
Pueden definirse dos grupos de redes de comunicación en la empresa:
• Redes de Información, y
• Redes de Campo.
Las primeras se ubican en la parte alta de la jerarquía CIM y las últimas en la parte baja.
En la figura 1.4 se muestra cómo se posicionan los tipos de redes en un modelo CIM.
Figura 1.4. Posicionamiento de las redes de información e industriales y equipamiento típico
frente al modelo CIM.
9
1.4.1 Redes de Información
Estas redes se encuentran, en un sentido ascendente, en los niveles de célula, factoría y
empresa del modelo CIM. Son redes orientadas al transporte de grandes paquetes de datos, que
aparecen en forma esporádica (baja carga), y con un amplio ancho de banda para permitir el
envío rápido de una gran cantidad de datos.
Permiten a los diversos sistemas y archivos el acceso a los datos de la planta, relativos a
los costos, calidad, fabricación y desarrollo (ofimática). Por lo general, las redes utilizadas en
estos niveles jerárquicos son basadas en tecnología IP. Ejemplos de estas redes son EtherNet,
WiFi y WiMax en el nivel de empresa y EtherNet y MAP en el nivel de Factoría.
Los dispositivos típicos a conectar por estas redes son Computadores Personales (PC),
servidores (Host) y MainFrames.
1.4.2 Redes de Campo
Las redes de campo se ubican, en un sentido ascendente, en los niveles de sensor/actuador,
campo y célula dentro del modelo CIM. Son redes utilizadas para conectar distintos procesos de
aplicación con el propósito de asegurar la explotación de la instalación (comando, supervisión,
mantenimiento y gestión). Provee servicios bajo restricciones temporales (tiempo real) y están
constituidas por protocolos capaces de gestionar estas restricciones (garantiza que las
restricciones de tiempo serán respetadas con cierta probabilidad). A diferencia de las redes de
información, están diseñadas para enfrentar un tráfico formado por un gran número de pequeños
paquetes, intercambiados con frecuencia entre un alto número de estaciones que forman la red y
que muchas veces trabajan en tiempo real.
Ejemplos de redes de campo son ControlNet, DeviceNet, Profibus y Foundation Fieldbus,
entre otros.
10
Los dispositivos típicos a conectar son PLC, PC (con tarjetas de red de campo), partidores
de motores, variadores de frecuencia y sensores entre otros.
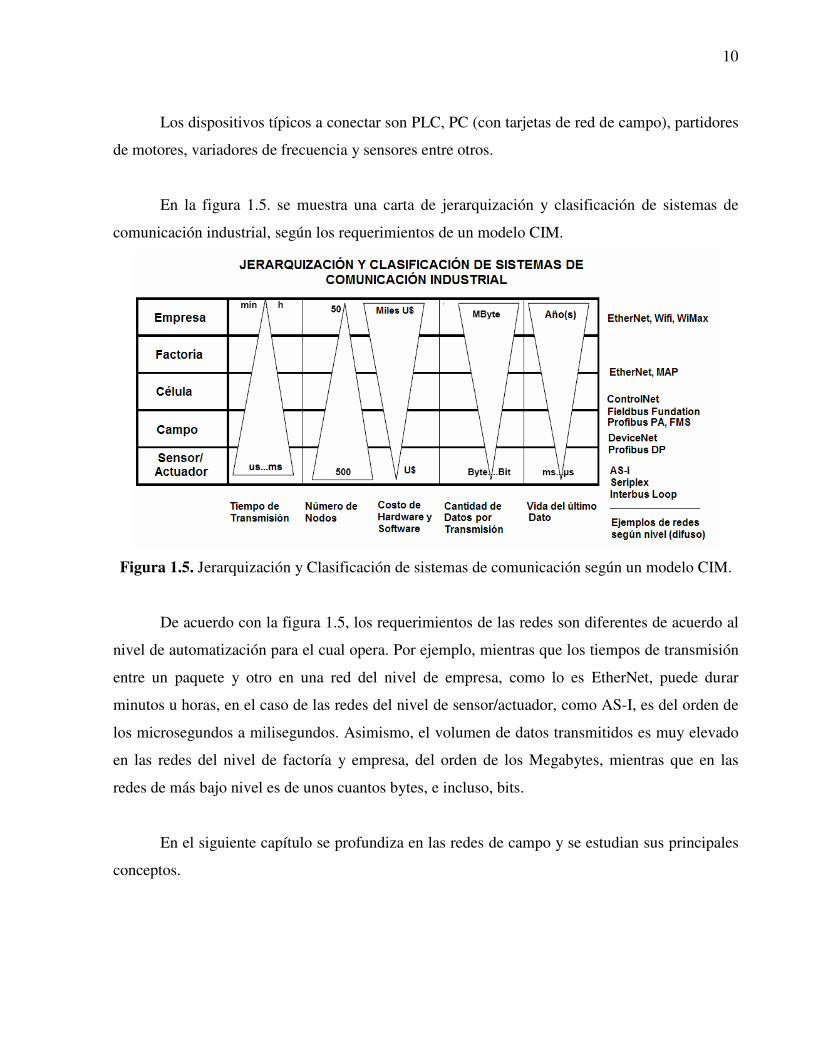
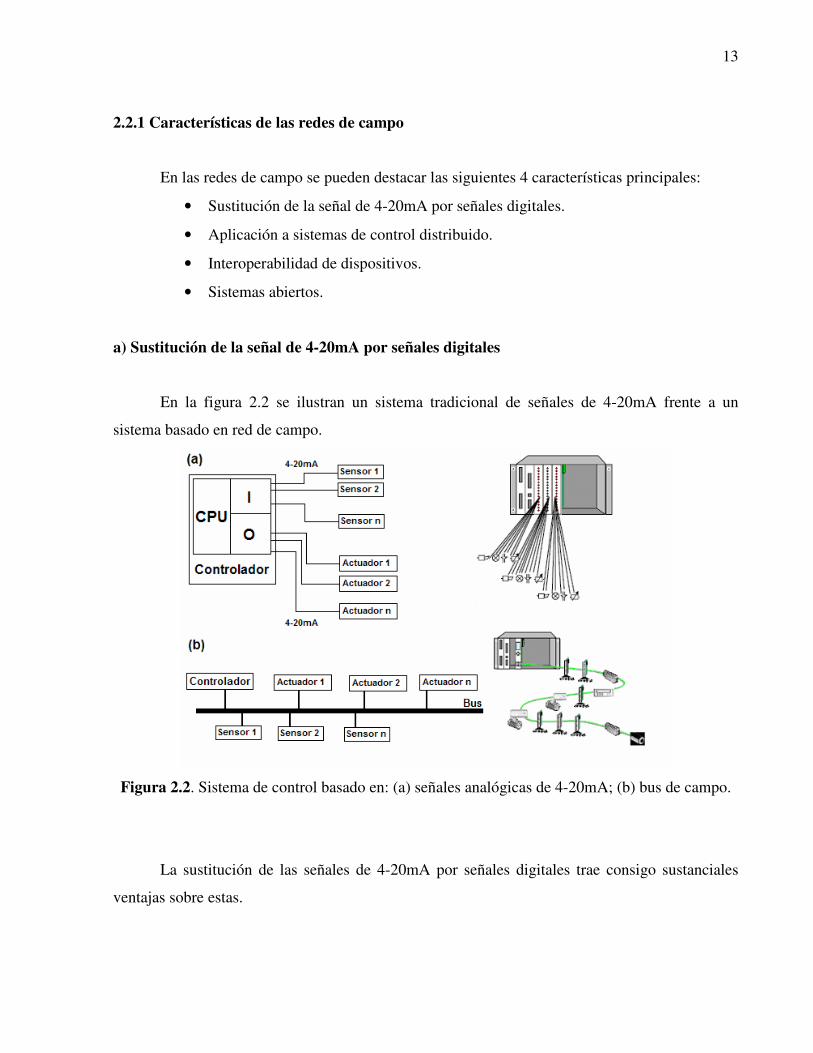
En la figura 1.5. se muestra una carta de jerarquización y clasificación de sistemas de
comunicación industrial, según los requerimientos de un modelo CIM.
Figura 1.5. Jerarquización y Clasificación de sistemas de comunicación según un modelo CIM.
De acuerdo con la figura 1.5, los requerimientos de las redes son diferentes de acuerdo al
nivel de automatización para el cual opera. Por ejemplo, mientras que los tiempos de transmisión
entre un paquete y otro en una red del nivel de empresa, como lo es EtherNet, puede durar
minutos u horas, en el caso de las redes del nivel de sensor/actuador, como AS-I, es del orden de
los microsegundos a milisegundos. Asimismo, el volumen de datos transmitidos es muy elevado
en las redes del nivel de factoría y empresa, del orden de los Megabytes, mientras que en las
redes de más bajo nivel es de unos cuantos bytes, e incluso, bits.
En el siguiente capítulo se profundiza en las redes de campo y se estudian sus principales
conceptos.
11
CAPÍTULO II
CONCEPTOS SOBRE LAS REDES DE CAMPO
2.1 Introducción
Tal como se estudió en el capítulo anterior, se han desarrollado arquitecturas de
comunicación basadas en el modelo CIM de automatización industrial, bajo el cual se estructuran
las redes de comunicación en forma jerárquica, de acuerdo con sus funcionalidades. Dentro de
estas redes se encuentran las redes de campo. En el presente capítulo se estudian los principales
conceptos relacionados con este tipo de redes de comunicación, los que permiten establecer una
base conceptual para el posterior estudio de las redes DeviceNet y ControlNet.
2.2 ¿Redes de Campo o “Buses de Campo”?
Las redes de campo son una tecnología para aplicaciones de comunicación en entornos
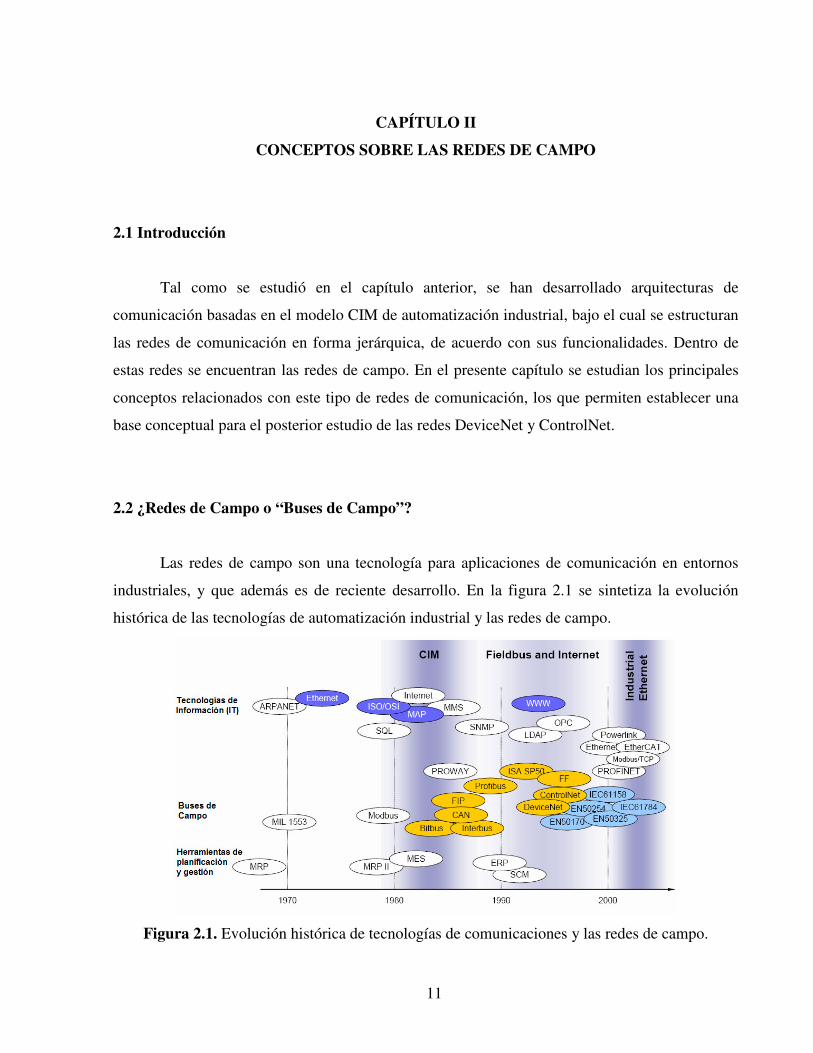
industriales, y que además es de reciente desarrollo. En la figura 2.1 se sintetiza la evolución
histórica de las tecnologías de automatización industrial y las redes de campo.
Figura 2.1. Evolución histórica de tecnologías de comunicaciones y las redes de campo.
11
12
En la figura puede observarse que las redes de campo, destacadas en color amarillo,
aparecen a mediados de la década de los ochenta del siglo recién pasado y que proliferan
fuertemente en la década de los noventa.
También se puede apreciarse en la figura el término “buses de campo” para referirse a este
grupo de redes de comunicación. Éste término viene del inglés Fieldbus, y se utiliza para referirse
a las redes de campo. Sin embargo, éste término adolece de deficiencias al describir la tecnología,
pues hace referencia a la topología bus o, de línea troncal, originalmente utilizada en las primeras
redes de campo. Además, no existe una definición formal para el término fieldbus, o bus de
campo.
Por otra parte, el término red de campo, resulta más preciso al describir la tecnología de
las redes de comunicación orientadas a las aplicaciones de control en entornos industriales, tales
como la recolección de datos desde el campo, es decir, el terreno industrial (por ejemplo, un
sensor inductivo) y el comando de acciones desde un controlador hacia otros dispositivos que
integran la red (por ejemplo, un Variador de Frecuencia).
Una definición para red de campo
Si bien se maneja un concepto para las redes de campo (o menos preciso, buses de campo),
hace falta una definición un tanto más formal. Por ello, una definición para este tipo de redes de
comunicación puede ser la siguiente:
“Red de comunicación diseñada para entornos y aplicaciones de automatización industrial,
optimizada para operar en los niveles más bajos de la jerarquía de manufactura. En el caso del
modelo CIM, en los niveles de sensor/actuador, campo y célula”.
En este trabajo, los términos red de campo y bus de campo, se utilizan (indistintamente)
con la definición anterior, aunque se prefiere el término red de campo. En las secciones siguientes,
se profundiza en las características de las redes de campo.
13
2.2.1 Características de las redes de campo
En las redes de campo se pueden destacar las siguientes 4 características principales:
• Sustitución de la señal de 4-20mA por señales digitales.
• Aplicación a sistemas de control distribuido.
• Interoperabilidad de dispositivos.
• Sistemas abiertos.
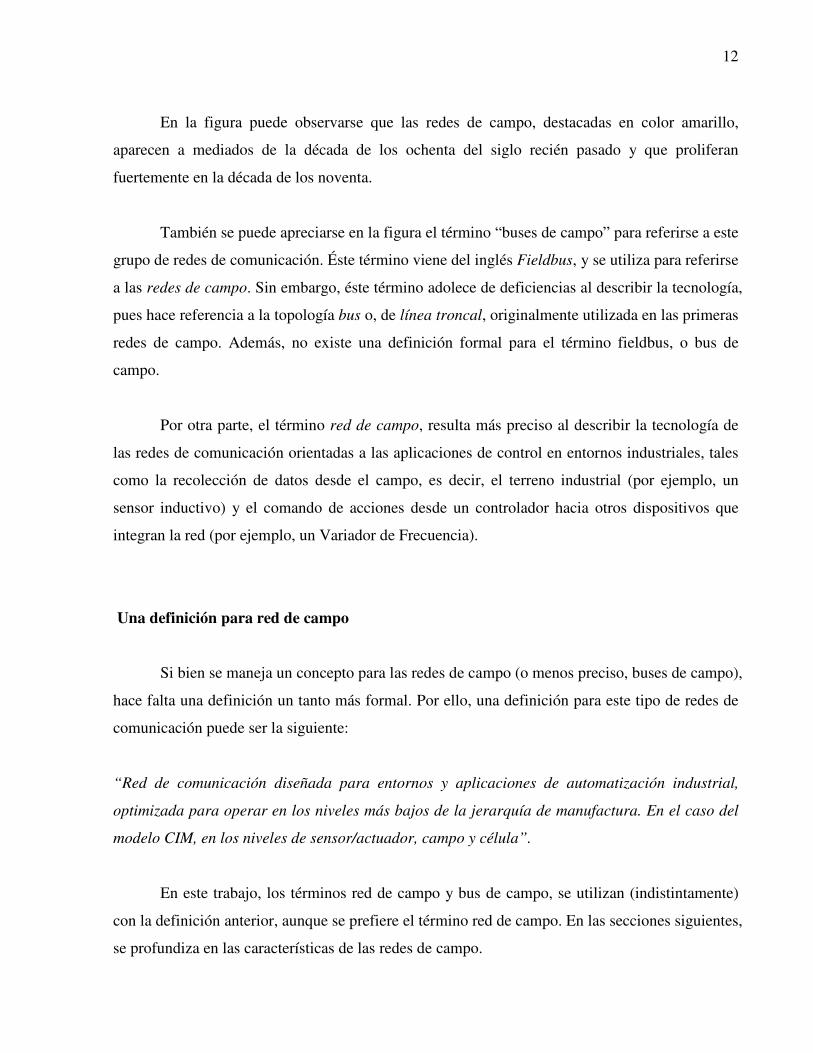
a) Sustitución de la señal de 4-20mA por señales digitales
En la figura 2.2 se ilustran un sistema tradicional de señales de 4-20mA frente a un
sistema basado en red de campo.
Figura 2.2. Sistema de control basado en: (a) señales analógicas de 4-20mA; (b) bus de campo.
La sustitución de las señales de 4-20mA por señales digitales trae consigo sustanciales
ventajas sobre estas.
14
• Mayor exactitud y confiabilidad de datos: Debido a la comunicación digital, ya que los
microprocesadores, por ejemplo en un transmisor y un controlador, pueden hablar
directamente, en lugar de pasar a través de conversiones D/A y A/D, de las cuales hay
muchas en un lazo cerrado. El estado es enviado junto con los datos de medición y control.
En consecuencia, es posible determinar si la información es confiable o no. Todos los
datos son verificados y garantizados libres de distorsión debido al ruido o a algún
desajuste de impedancia que en las señales analógicas no serian detectados.
• Acceso multivariable: Esto significa que un transmisor de presión, por ejemplo, no está
limitado a una sola salida para presión, sino que también informa la temperatura de
proceso. Otro ejemplo es el acceso a la variable de setpoint y a la variable manipulada de
un controlador en el mismo dispositivo, o los distintos canales de entrada en un
transmisor de temperatura.
• Configuración y diagnósticos remotos: La comunicación digital permite modificar
remotamente la configuración completa. La calibración se efectúa en funcionamiento sin
tener que aplicar ninguna entrada o medir la salida. De manera similar se puede interrogar
el estado de los autodiagnósticos.
• Disminución y simplificación del cableado: Se logra a través de la conexión de varios
dispositivos sobre un solo par de cables. La conexión es una tarea sencilla, ya que todo se
encuentra en paralelo y el número de terminales a utilizar es mínimo. Esto significa un
bajo costo y un fácil reemplazo de viejos transmisores.
15
b) Aplicación a sistemas de Control Distribuido
Los buses de campo permiten un control distribuido al incorporar esta función en los
propios dispositivos. Sin embargo, también es posible configurar una arquitectura de control
centralizada.
c) Topologías de buses de campo
Los buses de campo admiten la implementación de distintas topologías. Entre ellas, las
más comunes son:
• Línea Troncal (Bus): La estructura de Línea Troncal (bus) es muy clara y entraña muy
poca complejidad, ya que todos los usuarios se comunican a través de una línea común.
Los dispositivos se conectan con o sin derivaciones cortas, lo que en ocasiones conduce a
cableados algo engorrosos.
• Árbol: La estructura en árbol es similar a la lineal con la única diferencia de que varias
derivaciones pueden converger en los nodos. Esta estructura permite conectar en red
zonas muy amplias de una manera más fácil y más flexible.
• Estrella: Una estación central está conectada a todos los usuarios mediante conexiones a
dos-puntos formando una estructura en estrella. Esta estación central puede actuar como
Master y ser responsable del control de la red, o actuar como “acoplador en estrella”,
estableciendo simplemente la conexión entre el emisor y el receptor.
• Anillo: Si se construye un anillo físico con varias conexiones de dos-puntos, se denomina
estructura en anillo. Los mensajes se transmiten de un usuario al siguiente. El hecho de
que la señal se amplíe cada vez que se transmite el mensaje permite a éste recorrer
grandes distancias.
16
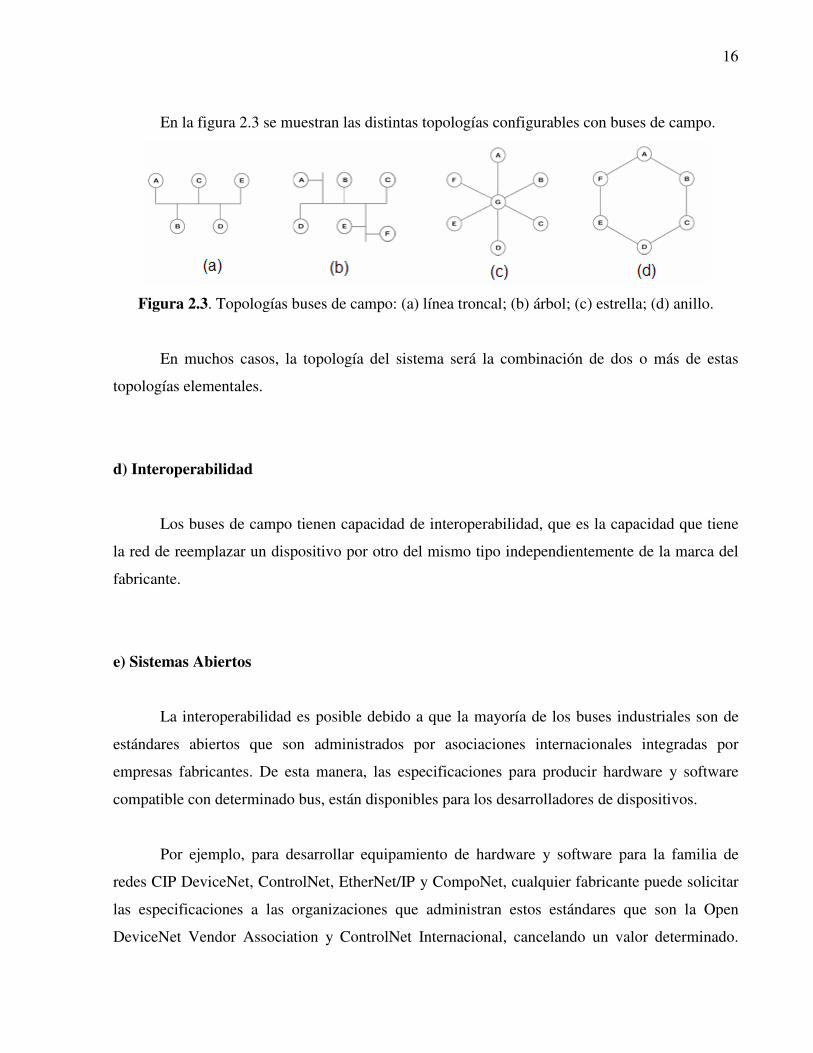
En la figura 2.3 se muestran las distintas topologías configurables con buses de campo.
Figura 2.3. Topologías buses de campo: (a) línea troncal; (b) árbol; (c) estrella; (d) anillo.
En muchos casos, la topología del sistema será la combinación de dos o más de estas
topologías elementales.
d) Interoperabilidad
Los buses de campo tienen capacidad de interoperabilidad, que es la capacidad que tiene
la red de reemplazar un dispositivo por otro del mismo tipo independientemente de la marca del
fabricante.
e) Sistemas Abiertos
La interoperabilidad es posible debido a que la mayoría de los buses industriales son de
estándares abiertos que son administrados por asociaciones internacionales integradas por
empresas fabricantes. De esta manera, las especificaciones para producir hardware y software
compatible con determinado bus, están disponibles para los desarrolladores de dispositivos.
Por ejemplo, para desarrollar equipamiento de hardware y software para la familia de
redes CIP DeviceNet, ControlNet, EtherNet/IP y CompoNet, cualquier fabricante puede solicitar
las especificaciones a las organizaciones que administran estos estándares que son la Open
DeviceNet Vendor Association y ControlNet Internacional, cancelando un valor determinado.
17
Además, un fabricante de dispositivos puede asociarse a estas organizaciones. En la figura 2.4 se
muestran los CDs con las especificaciones para tres redes de la familia CIP. Asimismo, en el
anexo 5 se entrega el formulario de petición de las especificaciones junto al costo que estas tienen.
Figura 2.4. Especificaciones para redes industriales de la familia CIP. Cualquier fabricante de
dispositivos puede acceder a éstas y desarrollar productos compatibles.
2.2.2 Modelo ISO/OSI y buses de campo
Los buses de campo, como redes de comunicación, se basan en la estructura jerárquica
especificada en el modelo ISO/OSI.
Cada bus de campo implementa las capas definidos en el modelo OSI, pero no
necesariamente definirá todas las capas. Las capas que no se definen permanecen vacías o bien
son implementadas parcialmente en la misma capa de aplicación (capa 7).
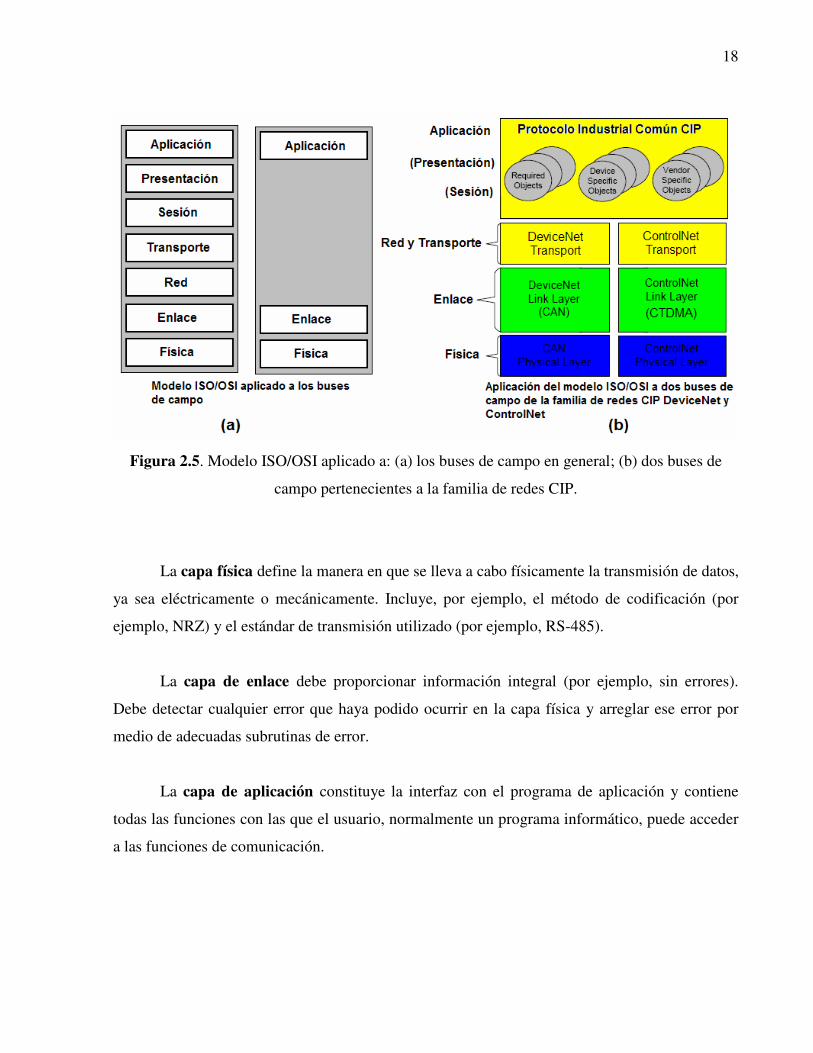
Las capas física, de enlace y de aplicación son siempre necesarias. En la figura 2.5 se
ilustra la implementación del modelo OSI en los buses de campo.
18
Figura 2.5. Modelo ISO/OSI aplicado a: (a) los buses de campo en general; (b) dos buses de
campo pertenecientes a la familia de redes CIP.
La capa física define la manera en que se lleva a cabo físicamente la transmisión de datos,
ya sea eléctricamente o mecánicamente. Incluye, por ejemplo, el método de codificación (por
ejemplo, NRZ) y el estándar de transmisión utilizado (por ejemplo, RS-485).
La capa de enlace debe proporcionar información integral (por ejemplo, sin errores).
Debe detectar cualquier error que haya podido ocurrir en la capa física y arreglar ese error por
medio de adecuadas subrutinas de error.
La capa de aplicación constituye la interfaz con el programa de aplicación y contiene
todas las funciones con las que el usuario, normalmente un programa informático, puede acceder
a las funciones de comunicación.
19
2.2.3 Buses de Campo Existentes
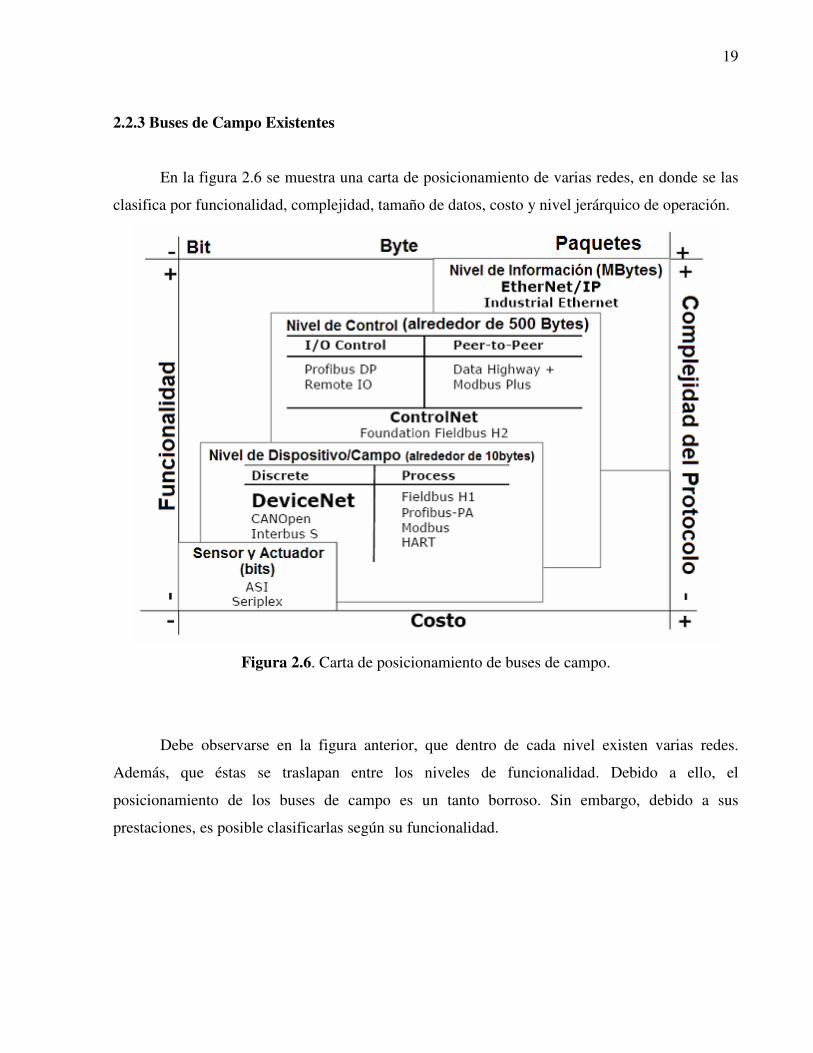
En la figura 2.6 se muestra una carta de posicionamiento de varias redes, en donde se las
clasifica por funcionalidad, complejidad, tamaño de datos, costo y nivel jerárquico de operación.
Figura 2.6. Carta de posicionamiento de buses de campo.
Debe observarse en la figura anterior, que dentro de cada nivel existen varias redes.
Además, que éstas se traslapan entre los niveles de funcionalidad. Debido a ello, el
posicionamiento de los buses de campo es un tanto borroso. Sin embargo, debido a sus
prestaciones, es posible clasificarlas según su funcionalidad.
20
a) Buses de Campo de Funcionalidad Baja
A esta categoría pertenecen los buses de campo del nivel de Sensor/Actuador. Están
diseñados para integrar dispositivos simples como finales de carrera, fotocélulas, relés y
actuadores simples, funcionando en aplicaciones de tiempo real, y agrupados en una pequeña
zona de la planta, típicamente una máquina. Básicamente comprenden las capas física y de enlace
del modelo OSI, es decir, señales físicas y patrones de bits de las tramas. Algunos ejemplos son:
• CAN: Diseñado originalmente para su aplicación en vehículos.
• SDS: Bus para la integración de sensores y actuadores, basado en CAN.
• AS-I: Bus serie diseñado por Siemens para la integración de sensores y actuadores.
b) Buses de Campo de Funcionalidad Media
A esta categoría pertenecen los buses de campo del nivel de Dispositivo/Campo (Control
de Máquina en un modelo CIM). Se basan en el diseño de una capa de enlace para el envío
eficiente de bloques de datos de tamaño medio. Estos mensajes permiten que el dispositivo tenga
mayor funcionalidad de modo que permite incluir aspectos como la configuración, calibración o
programación del dispositivo. Son buses capaces de controlar dispositivos de campo complejos,
de forma eficiente y a bajo costo. Normalmente incluyen la especificación completa de la capa de
aplicación, lo que significa que se dispone de funciones utilizables desde programas basados en
PCs para acceder, cambiar y controlar los diversos dispositivos que constituyen el sistema.
Algunos incluyen funciones estándar para distintos tipos de dispositivos (perfiles) que facilitan la
interoperbilidad de dispositivos de distintos fabricantes.
Algunos ejemplos son:
• DeviceNet: Desarrollado por Rockwell-Automation, utiliza como base el bus CAN,
e incorpora una capa de aplicación orientada a objetos.
• LONWorks: Red desarrollada por Echelon.

21
• BitBus: Red desarrollada por INTEL.
• DIN MessBus: Estándar alemán de bus de instrumentación, basado en
comunicación RS-232.
• InterBus-S: Bus de campo alemán de uso común en aplicaciones medias.
c) Buses de Campo de Funcionalidad Alta
A esta categoría pertenecen los niveles de control y de información. Es decir, comunican
las capas superiores del modelo CIM con las inferiores. Por ello, estas redes deben ser capaces de
soportar comunicaciones a nivel de todos los niveles de la producción CIM. Aunque se basan en
buses de alta velocidad, algunos presentan problemas debido a la sobrecarga necesaria para
alcanzar las características funcionales y de seguridad que se les exigen. La capa de aplicación
tiene un gran número de servicios a la capa de usuario, habitualmente un subconjunto del
estándar MMS (Manufacturing Message Specification). Entre sus características incluyen:
• Redes multi-maestro con redundancia.
• Comunicación maestro-esclavo según el esquema pregunta-respuesta.
• Recuperación de datos desde el esclavo con un límite máximo de tiempo
• Capacidad de direccionamiento unicast, multicast y broadcast,
• Petición de servicios a los esclavos basada en eventos.
• Comunicación de variables y bloques de datos orientada a objetos.
• Descarga y ejecución remota de programas.
• Altos niveles de seguridad de la red, opcionalmente con procedimientos de
autentificación.
• Conjunto completo de funciones de administración de la red.
22
Algunos ejemplos son:
• ControlNet
• Profibus
• FIP
• Fieldbus Foundation
2.2.4 Estandarización de buses de campo
La proliferación de buses de campo debido a una falta de acuerdo entre fabricantes,
organizaciones, y a la intensa pelea por el mercado se ha llegado a conocer como “la guerra de
los buses”. Debido a esto, se han hecho esfuerzos por conseguir una estandarización única. Este
objetivo se ha logrado parcialmente con el desarrollado los dos proyectos de estandarización más
importantes que son IEC-61158 e IEC-62026. En estos proyectos, los buses de campo más
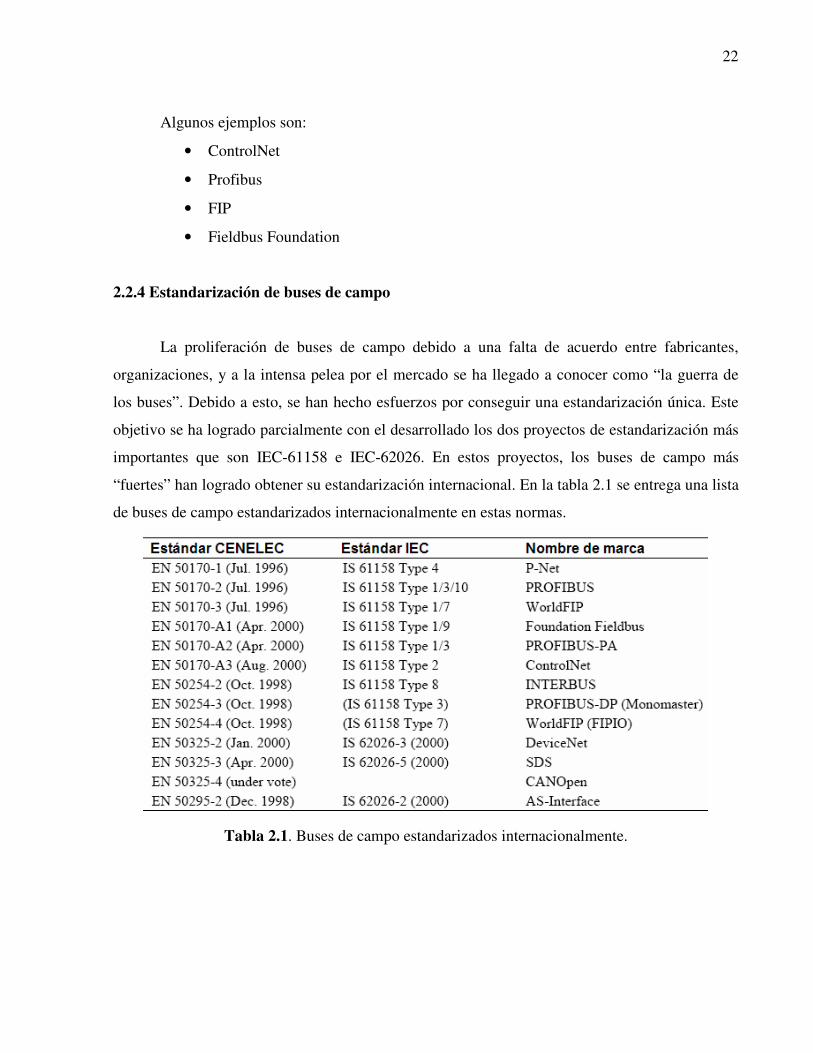
“fuertes” han logrado obtener su estandarización internacional. En la tabla 2.1 se entrega una lista
de buses de campo estandarizados internacionalmente en estas normas.
Tabla 2.1. Buses de campo estandarizados internacionalmente.
23
2.3 Comparaciones de buses de campo
En esta sección se entregan tablas que comparan cualitativamente las características de
algunos buses de campo que se pueden encontrar hoy día. Específicamente, los buses de campo
incluidos en esta sección son:
• DeviceNet,
• ControlNet,
• Profibus,
• Profibus-PA,
• AS-I,
• Foundation Fieldbus,
• FIP, y
• Profibus DP
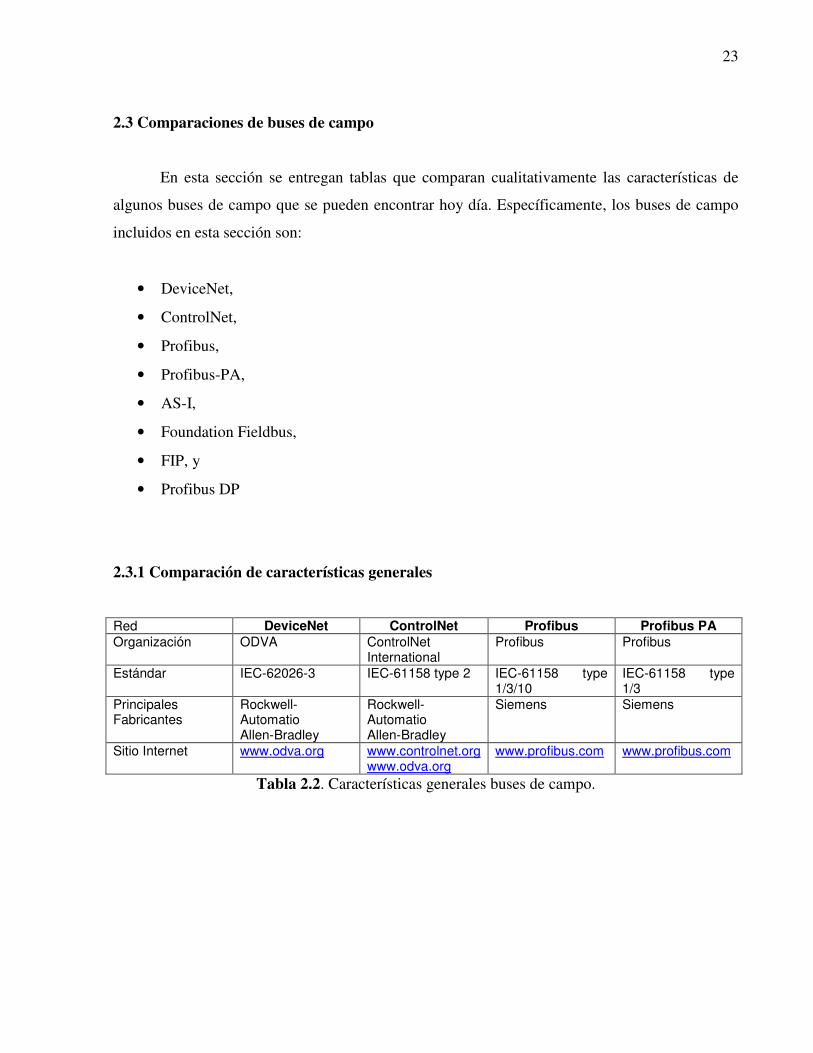
2.3.1 Comparación de características generales
Red DeviceNet ControlNet Profibus Profibus PA Organización ODVA ControlNet
International Profibus Profibus
Estándar IEC-62026-3 IEC-61158 type 2 IEC-61158 type 1/3/10
IEC-61158 type 1/3
Principales Fabricantes
Rockwell-Automatio Allen-Bradley
Rockwell-Automatio Allen-Bradley
Siemens Siemens
Sitio Internet www.odva.org www.controlnet.org www.odva.org
www.profibus.com www.profibus.com
Tabla 2.2. Características generales buses de campo.
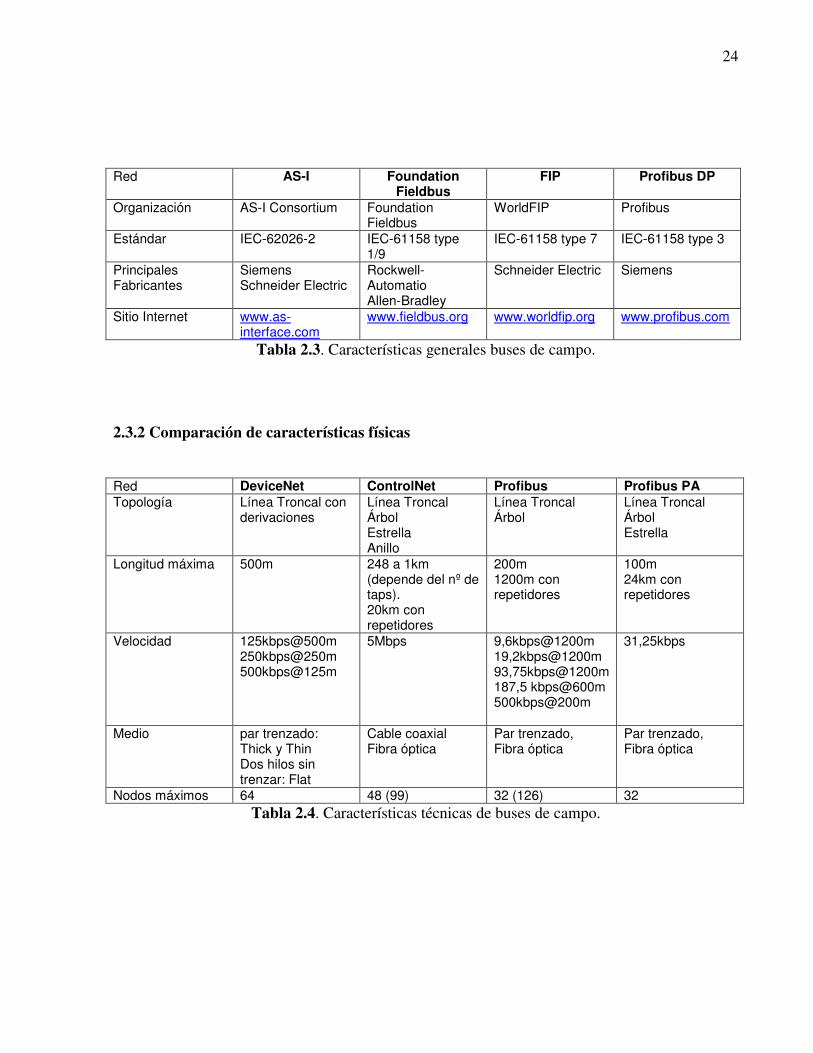
24
Red AS-I Foundation Fieldbus
FIP Profibus DP
Organización AS-I Consortium Foundation Fieldbus
WorldFIP Profibus
Estándar IEC-62026-2 IEC-61158 type 1/9
IEC-61158 type 7 IEC-61158 type 3
Principales Fabricantes
Siemens Schneider Electric
Rockwell-Automatio Allen-Bradley
Schneider Electric Siemens
Sitio Internet www.as-interface.com
www.fieldbus.org www.worldfip.org www.profibus.com
Tabla 2.3. Características generales buses de campo.
2.3.2 Comparación de características físicas
Red DeviceNet ControlNet Profibus Profibus PA Topología Línea Troncal con
derivaciones Línea Troncal Árbol Estrella Anillo
Línea Troncal Árbol
Línea Troncal Árbol Estrella
Longitud máxima 500m 248 a 1km (depende del nº de taps). 20km con repetidores
200m 1200m con repetidores
100m 24km con repetidores
Velocidad 125kbps@500m 250kbps@250m 500kbps@125m
5Mbps 9,6kbps@1200m 19,2kbps@1200m 93,75kbps@1200m 187,5 kbps@600m 500kbps@200m
31,25kbps
Medio par trenzado: Thick y Thin Dos hilos sin trenzar: Flat
Cable coaxial Fibra óptica
Par trenzado, Fibra óptica
Par trenzado, Fibra óptica
Nodos máximos 64 48 (99) 32 (126) 32 Tabla 2.4. Características técnicas de buses de campo.
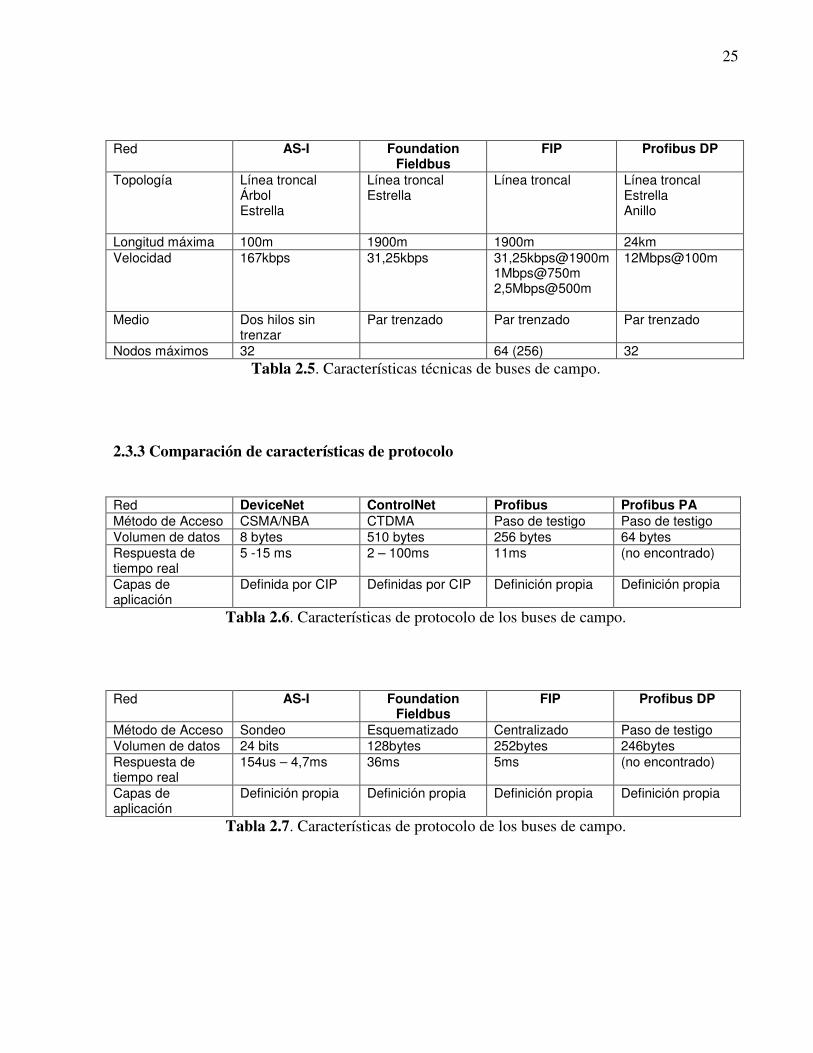
25
Red AS-I Foundation Fieldbus
FIP Profibus DP
Topología Línea troncal Árbol Estrella
Línea troncal Estrella
Línea troncal Línea troncal Estrella Anillo
Longitud máxima 100m 1900m 1900m 24km Velocidad 167kbps 31,25kbps 31,25kbps@1900m
1Mbps@750m 2,5Mbps@500m
12Mbps@100m
Medio Dos hilos sin trenzar
Par trenzado Par trenzado Par trenzado
Nodos máximos 32 64 (256) 32 Tabla 2.5. Características técnicas de buses de campo.
2.3.3 Comparación de características de protocolo
Red DeviceNet ControlNet Profibus Profibus PA Método de Acceso CSMA/NBA CTDMA Paso de testigo Paso de testigo Volumen de datos 8 bytes 510 bytes 256 bytes 64 bytes Respuesta de tiempo real
5 -15 ms 2 – 100ms 11ms (no encontrado)
Capas de aplicación
Definida por CIP Definidas por CIP Definición propia Definición propia
Tabla 2.6. Características de protocolo de los buses de campo.
Red AS-I Foundation Fieldbus
FIP Profibus DP
Método de Acceso Sondeo Esquematizado Centralizado Paso de testigo Volumen de datos 24 bits 128bytes 252bytes 246bytes Respuesta de tiempo real
154us – 4,7ms 36ms 5ms (no encontrado)
Capas de aplicación
Definición propia Definición propia Definición propia Definición propia
Tabla 2.7. Características de protocolo de los buses de campo.
26
En cuanto a estas últimas tablas, se observa que en cuanto al protocolo, el nivel de
aplicación de cada red de campo, de acuerdo con el modelo OSI, es de definición propia, a
excepción de las redes DeviceNet y ControlNet. En el caso de estas últimas redes de campo,
poseen una definición común a través de un protocolo denominado CIP (Common Industrial
Protocol). Las características que otorga a las redes de campo la implementación de CIP en sus
capas superiores es la transparencia de comunicación entre ellas, sólo debiendo traducir un
mensaje en los niveles más bajos del modelo OSI y conservando su estructura para las capas de
aplicación. Este tema se ve con más detalle en la Parte II siguiente, dedicada al estudio del
protocolo CIP.

