Embed Size (px)
Citation preview

Statica solidului rigid
Mecanica I 1
CURS 8
STATICA SOLIDULUI RIGID
CUPRINS
8. Statica solidului rigid ….…………………………...………...………...…………………1
Cuprins……………………………………………………………………………………..1
Introducere modul………………………………………………………………………….1
Obiective modul...………………………………………………………………………….2
8.1. Generalităţi …………………………………............................................................2
8.2. Echilibrul solidului rigid liber ..................................................................................4
Test de autoevaluare 1 ..................................................................................................7
8.3. Legăturile ideale ale solidului rigid în problema plană .........................................7
8.4. Solid rigid static determinat ...................................................................................12
Test de autoevaluare 2 ................................................................................................14
8.5. Încărcări ...................................................................................................................14
Test de autoevaluare 3 ................................................................................................17
Bibliografie modul……………………………………………………………………………17
Rezumat modul……………………………………………………………………………….18
Rezolvarea testelor de autoevaluare ...…………………………..…...………………………18
8. Statica solidului rigid
Introducere
modul
În acest modul se vor studia condiţiile de echilibru pentru solidul
rigid liber şi solidul rigid cu legături ideale. Se vor prezenta
legăturile ideale ale solidului rigid în plan, modul de evaluare al
acţiunilor (încărcări) şi se va defini o noţiune foarte importantă
pentru inginerul constructor, noţiunea de corp static determinat.

Statica solidului rigid
Mecanica I 2
Obiective modul
După parcurgerea acestui modul cursantul va şti:
- să exprime echilibrul solidului rigid liber;
- legăturile ideale ale solidului rigid în problema plană;
- să aplice corect legături unui solid rigid pentru ca acesta să
devină un corp static determinat;
- să utilizeze diferite tipuri de încărcări;
- să exprime echilibrul solidului rigid cu legături ideale.
Durata medie de
studiu individual
2 ore
Acest interval de timp presupune asimilarea noţiunilor prezentate în
acest modul şi realizarea testelor de autoevaluare.
8.1. Generalităţi
Solidul rigid este un corp nedeformabil, adică acel corp la care distanţa dintre oricare două
puncte nu se modifică indiferent de acţiunile exercitate asupra lui.
Un solid rigid este liber dacă poate ocupa orice poziţie în spaţiu. Dacă un solid rigid nu poate
ocupa orice poziţie în spaţiu datorită restricţiilor de natură geometrică impuse punctelor lui,
acesta se numeşte solid rigid cu legături. Dacă reacţiunile corespunzătoare legăturilor au
direcţia normală la suprafaţa reprezentând legătura, solidul rigid este supus unor legături
ideale (fără frecare).
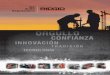
Poziţia unui solid rigid se defineşte prin poziţiile punctelor lui. Bineînţeles, se va căuta
definirea poziţiei solidului rigid prin definirea poziţiei a cât mai puţine puncte din acesta
(figura 8.1).
Fie solidul rigid liber din figura 8.1.a. Se va defini poziţia punctului A în raport cu sistemul de
referinţă ales. Este ca şi când s-ar fixa acel punct al corpului. Deoarece solidul se poate roti în
jurul punctului A, se defineşte şi poziţia altui punct B. Se constată că solidul se poate roti în
raport cu axa ce conţine punctele A şi B, deci este necesară definirea poziţiei unui al treilea
punct (C) astfel încât acest punct să nu fie coliniar cu punctele A şi B. Deoarece solidul nu-şi

Statica solidului rigid
Mecanica I 3
mai poate modifica poziţia, rezultă că pentru definirea acesteia este nevoie de definirea a nouă
parametri de poziţie (coordonatele celor trei puncte distincte şi necoliniare).
Dar solidul este nedeformabil, adică distanţele între cele trei puncte nu se modifică. Aceasta
înseamnă că între cele nouă cordonate există trei dependenţe:
Rezultă că pentru a defini complet poziţia unui solid rigid în spaţiu este nevoie de şase
parametri de poziţie independenţi.
Pentru definirea poziţiei unui solid rigid liber în plan (figura 8.1.b) este nevoie de definirea
poziţiei a două puncte distincte ale acestuia. Între coordonatele acestor puncte este o
dependenţă:
Rezultă că pentru definirea poziţiei unui solid rigid în plan este nevoie de trei parametri de
poziţie independenţi.
Fie un solid rigid liber în spaţiu (figura 8.2.a). Pentru modificarea poziţiei acestui solid există
şase posibilităţi independente de mişcare (trei translaţii paralele cu axele de coordonate şi trei
rotaţii în raport cu trei axe paralele cu axele de coordonate). Rezultă că un solid rigid liber are,
în spaţiu, şase grade de libertate (un grad de libertate este o posibilitate independentă de
mişcare).
O
z
y
x
A(xA,yA,zA)
x
y
A(xA,yA)
O
Fig. 8.1. Definirea poziţiei solidului rigid liber
B(xB,yB,zB)
C(xC,yC,zC)
B(xB,yB)
a) b)
l l3
l2
l1

Statica solidului rigid
Mecanica I 4
Fie un solid rigid liber în problema plană (figura 8.2.b). Se observă că pentru modificarea
poziţiei acestui solid este nevoie de trei mişcări independente (două translaţii paralele paralele
cu axele de coordonate şi o rotaţie în raport cu o axă perpendiculară pe planul solidului).
Rezultă că în plan un solid rigid liber are trei grade de libertate.
În ambele situaţii (spaţiu sau plan) numărul parametrilor de poziţie independenţi este egal cu
numărul gradelor de libertate:
8.2. Echilibrul solidului rigid liber
Fie un solid rigid liber aflat în repaus. Condiţia ca solidul să rămână în repaus este ca sistemul
de forţe ce acţionează asupra lui să fie în echilibru. Se va spune în această situaţie că solidul
rigid este în echilibru.
Condiţiile vectoriale de echilibru pentru un sistem de forţe sunt:
unde este rezultanta sistemului de forţe iar este momentul rezultant al sistemului de
forţe în raport cu un punct oarecare O.
Aceste condiţii se pot pune sub forma:
Fig. 8.2. Gradele de libertate ale unui solid rigid liber
b)
O
z
y
x
a)
x
y
O

Statica solidului rigid
Mecanica I 5
Condiţiile scalare de echilibru se obţin proiectând condiţiile vectoriale pe axele sistemului de
referinţă:
În problema plană (atunci când solidul este acţionat de un sistem de forţe coplanare acţionând
în planul solidului) condiţiile scalare sunt:
Se observă că pentru exprimarea echilibrului unui solid rigid liber se pot scrie două ecuaţii de
proiecţii de forţe şi o ecuaţie de proiecţii de momente. Aceste condiţii înseamnă că solidul nu
trebuie să se mişte pe direcţiile gradelor lui de libertate. O ecuaţie de proiecţie de forţe are ca
rezultat suprimarea unei translaţii pe direcţia axei pe care se realizează proiecţia de forţe iar o
ecuaţie de proiecţie de momente are ca rezultat suprimarea rotaţiei solidului în raport cu axa
pe care se proiectează momentele. Astfel, prin scrierea a două ecuaţii de forţă se suprimă
translaţiile posibile în plan iar prin scrierea ecuaţiei de moment în raport cu un punct din
planul forţelor se suprimă rotaţia în raport cu axa perpendiculară pe planul forţelor ce trece
prin punctul considerat. Practic, în plan se suprimă posibilitatea solidului de a se roti în jurul
punctului în raport cu care se scrie ecuaţia de moment (figura 8.3.a).
Suprimarea posibilităţilor de mişcare ale unui solid rigid se poate face şi în alt mod (figura
8.3.b). Astfel, se observă că dacă se suprimă rotaţia solidului în raport cu două puncte atunci
se suprimă implicit şi translaţia solidului pe direcţie perpendiculară pe dreapta ce conţine cele
două puncte. În figura 8.3.b s-au ales punctele A şi B pe orizontală. Dacă solidului i se
a) b)
A B
Fig. 8.3. Suprimarea gradelor de libertate ale unui solid rigid

Statica solidului rigid
Mecanica I 6
suprimă posibilitatea de a se roti în raport cu punctul A atunci punctul B nu se poate deplasa
pe direcţie verticală. La fel, dacă se suprimă rotaţia solidului în raport cu punctul B atunci
punctul A nu se poate deplasa pe direcţie verticală. Deorece corpul este solid rigid rezultă că
nici un alt punct al lui nu se poate deplasa pe verticală.
În acest mod se poate înlocui o ecuaţie de forţă cu o ecuaţie de moment. Astfel se pot scrie,
pentru exemplul considerat, următoarele condiţii de echilibru:
La scrierea în acest mod a ecuaţiilor de echilibru se observă că există situaţia în care sistemul
de ecuaţii este nedeterminat. Aceasta se întâmplă atunci când ecuaţia de forţă utilizată se scrie
pe direcţie perpendiculară pe dreapta ce conţine punctele în raport cu care s-au scris ecuaţiile
de moment (adică se suprimă acelaşi grad de libertate atât prin ecuaţia de forţă cât şi printr-o
ecuaţie de moment). Situaţia prezentată trebuie evitată în scrierea ecuaţiilor de echilibru
pentru.
Rezultă exprimarea condiţiilor de echilibru printr-o singură ecuaţie de forţă şi două ecuaţii de
moment:
Exprimarea condiţiilor de echilibru se poate face şi prin trei ecuaţii de moment, cu restricţia
ca punctele în raport cu care se exprimă aceste ecuaţii să fie necoliniare:

Statica solidului rigid
Mecanica I 7
Test de
autoevaluare 1
1. Indicaţi enunţul corect:
a) Solidul rigid este un corp nedeformabil;
b) Solidul rigid este un model utilizat de mecanica teoretică;
c) Solidul rigid este corpul pentru care distanţa dintre oricare două
puncte nu se modifică indiferent de acţiunile exercitate asupra lui.
2. Enunţul ,,Un solid rigid liber are în plan trei grade de libertate”
este:
a) adevărat;
b) fals.
3. Ce restricţie se impune dacă se exprimă echilibrul unui solid rigid
prin două ecuaţii de forţă şi o ecuaţie de moment?
Sugestiile de rezolvare și răspunsurile corecte sunt indicate la
finalul modulului.
8.3. Legăturile ideale ale solidului rigid în problema plană
Legăturile unui solid rigid sunt restricţii de natură geometrică impuse punctelor solidului. Este
evident că orice asemenea restricţie produce efecte asupra posibilităţilor de mişcare ale
solidului, în sensul suprimării acestor posibilităţi. Rezultă că legăturile suprimă grade de
libertate solidului rigid.
În plan, legăturile ideale ale solidului rigid cele mai utilizate sunt:
- reazemul simplu;
- reazemul articulat (articulaţia);
- reazemul încastrat (încastrarea).
Reazemul simplu.
Prin definiţie reazemul simplu este legătura ideală (punctuală şi fără frecare) care suprimă
corpului un grad de libertate.
Reazemul simplu se poate obţine prin legarea unui punct al corpului cu un fir (figura 8.4.a)
sau cu un pendul (bară rigidă scurtă care permite rotaţia în jurul extremităţilor ei – figura
8.4.b). În ambele cazuri este suprimată posibilitatea de deplasare a punctului pe direcţia firului

Statica solidului rigid
Mecanica I 8
(într-un singur sens) sau pe direcţia pendulului (în ambele sensuri). Dacă solidul rigid se
sprijină pe alt corp (figura 8.4.c) este suprimată posibilitatea de mişcare a punctului de contact
dintre cele două corpuri pe normala la tangenta în punctul de rezemare.
Reazemul simplu se schematizează în două moduri. Prima schematizare (figura 8.4.d) este sub
forma unui triunghi având o latură dublată. Direcţia reazemului simplu este perpendiculara
dusă pe latura dublată. Prin această schematizare reazemul simplu este indicat ca legătură
bilateră şi este o schematizare utilizată în special în problema plană. A doua schematizare
(figura 8.4.e) este exprimată printr-un pendul şi este utilizată în problema spaţială. Direcţia
reazemului simplu este direcţia pendulului iar legătura este bilateră.
Prin aplicarea axiomei legăturilor reazemul simplu poate fi înlocuit cu o reacţiune ce va avea
următoarele caracteristici (figura 8.5):
mărimea – necunoscută (se determină din condiţiile de echilibru ale solidului rigid);
direcţia – direcţia reazemului simplu (normală la tangenta în punctul de contact dintre
solidul rigid şi suprafaţa reprezentând legătura – figura 8.5.a);
A A t
n n
Fig. 8.5. Reacţiunea introdusă de reazemul simplu
n
a) b) c)
direcţia reazemului
simplu
direcţia reazemului
simplu
a) b) c) d) e)
Fig. 8.4. Realizarea şi schematizarea reazemului simplu

Statica solidului rigid
Mecanica I 9
sensul – nedeterminat, dar nu o necunoscută independentă (fiind o legătură bilateră, se
alege iniţial un sens oarecare, semnul necunoscutei validând sau nu sensul ales);
punctul de aplicaţie – punctul în care se aplică reazemul simplu.
Se observă că reazemul simplu suprimă solidului rigid un grad de libertate şi introduce în
calcul o singură necunoscută scalară (mărimea reacţiunii corespunzătoare acestuia).
Reazemul articulat (articulaţia)
Prin definiţie reazemul articulat este legătura ideală ce imobilizează un punct al solidului
rigid.
Articulaţia permite solidului doar posibilitatea de a se roti în jurul punctului fixat deci îi
suprimă acestuia două grade de libertate (translaţiile pe două direcţii ortogonale).
Articulaţia se poate realiza prin suspendarea unui punct al solidului fie cu ajutorul a două fire
ideale (figura 8.6.a), fie prin intermediul a doi penduli (figura 8.6.b).
Schematizarea articulaţiei se face fie sub forma unui triunghi legat de mediul de rezemare
(figura 8.6.c) fie prin doi penduli dispuşi ca în figura 8.6.d.
Prin aplicarea axiomei legăturilor articulaţia poate fi înlocuită cu o reacţiune ce va avea
următoarele caracteristici (figura 8.7):
mărimea – necunoscută (se determină din condiţiile de echilibru ale solidului rigid);
direcţia – necunoscută(se determină din condiţiile de echilibru ale solidului rigid);
sensul – nedeterminat, dar nu o necunoscută independentă (fiind o legătură bilateră, se
alege iniţial un sens oarecare, semnul necunoscutei validând sau nu sensul ales);
a) b) c) d)
Fig. 8.6. Realizarea şi schematizarea articulaţiei

Statica solidului rigid
Mecanica I 10
punctul de aplicaţie – punctul în care se aplică articulaţia.
În calcul se preferă să se lucreze cu necunoscute de acelaşi fel (dacă se poate cu necunoscute
de tip mărime de forţă). De aceea se descompune reacţiunea în două componente cu
mărimile necunoscute dar cu direcţiile cunoscute (de regulă orizontală, notată respectiv
verticală, notată ).
Articulaţia suprimă solidului rigid două grade de libertate şi introduce în calcul două
necunoscute scalare (mărimile a două forţe de direcţii cunoscute).
În spaţiu se disting mai multe tipuri de articulaţii:
articulaţia sferică – imobilizează un punct al solidului şi suprimă trei grade de
libertate;
articulaţia cilindrică cu direcţie fixă (lagăr) – imobilizează o dreaptă ce trece prin solid
şi suprimă patru grade de libertate;
articulaţia cilindrică cu axă variabilă (articulaţie cilindrică) – suprimă solidului două
grade de libertate.
Reazemul încastrat (încastrarea)
Prin definiţie încastrarea este legătura ideală ce suprimă solidului rigid toate gradele de
libertate (îl imobilizează).
Încastrarea se realizează prin imobilizarea mai multor puncte ale solidului, prin introducerea
acestuia în mediul de rezemare, prin sudarea (lipirea) de acesta sau prin introducerea a trei
penduli (figura 8.8).
c)
Fig. 8.7. Reacţiunea introdusă de articulaţie
α
b) a)

Statica solidului rigid
Mecanica I 11
Încastrarea nu poate fi realizată ca o legătură punctuală, fiind nevoie de o linie de încastrare
(în plan) sau de o suprafaţă de încastrare (în spaţiu). Pentru că încastrarea este o legătură
ideală (deci şi punctuală) se admite un punct teoretic de încastrare (de obicei centrul de
greutate al liniei sau curbei de încastrare).
Prin aplicarea axiomei legăturilor încastrarea se înlocuieşte cu un sistem de forţe de legătură
necunoscute în fiecare punct de contact între solid şi mediul exterior. Acest sistem de forţe se
poate reduce în punctul teoretic de încastrare rezultând:
- o reacţiune forţă având mărimea şi direcţia necunoscute, sensul nedeterminat şi
punctul de aplicaţie în punctul teoretic de încastrare;
- o reacţiune moment cu mărimea necunoscută şi sens nedeterminat.
Deaorece este mai simplu de lucrat cu necunoscute de acelaşi fel, reacţiunea forţă se va
descompune pe două direcţii convenabile (de regulă orizontală şi verticală), astfel încât
necunoscutele corespunzătoare vor fi de tip mărime de forţă (figura 8.9).
O încastrare suprimă solidului trei grade de libertate şi introduce în calcul trei necunoscute
scalare (două necunoscute mărime de forţă şi o necunoscută mărime de moment).
În spaţiu, o încastrare suprimă solidului şase grade de libertate.
Fig. 8.9. Reacţiunile introduse de încastrare
punct teoretic
de încastrare
α
b) a)
Fig. 8.8. Realizarea şi schematizarea încastrării
c)
punct teoretic
de încastrare
punct teoretic
de încastrare
punct teoretic
de încastrare

Statica solidului rigid
Mecanica I 12
8.4. Solid rigid static determinat
Fie un solid rigid liber. Acesta va avea un număr (notat NGL) de grade de libertate (trei grade
de libertate în plan şi şase grade de libertate în spaţiu). Rezultă că pentru un solid rigid se pot
scrie un număr de ecuaţii de echilibru (notat cu E) egal cu numărul gradelor de libertate (trei
ecuaţii de echilibru în plan şi şase ecuaţii de echilibru în spaţiu).
Dacă se introduc legături (echivalente cu Nl legături simple) acestea vor introduce în calcul N
necunoscute scalare (N=Nl). Se disting următoarele situaţii:
1) Legăturile simple nu sunt suficiente pentru ca solidul să fie imobilizat ( ). În
această situaţie solidul păstrează grade de libertate şi se numeşte mecanism;
2) Este introdus numărul minim de legături simple, dispuse astfel încât solidul să fie
imobilizat ( ). În această situaţie solidul se numeşte corp static determinat (deoarece
din punct de vedere matematic problema este una determinată – numărul de ecuaţii de
echilibru este egal cu numărul necunoscutelor introduse de legături);
3) Este introdus numărul minim de legături simple pentru a imobiliza solidul ( ) dar
acesta nu este imobilizat, păstrând posibilităţi de mişcare în imediata vecinătate a poziţiei de
echilibru. Această situaţie se numeşte formă critică şi este de evitat. Un solid aflat în situaţia
de formă critică pastrează posibilităti limitate de mişcare (deci putem spune că are comportare
de mecanism), îndeplineşte o condiţie a corpului static determinat ( ) dar când
problema trebuie rezolvată se constată că este o problemă nedeterminată;
4) Este introdus un număr de legături mai mare decât numărul minim ( ) şi solidul
este imobilizat. Problema este una nedeterminată din punct de vedere matematic iar solidul se
numeşte corp static nedeterminat.
În continuare se va aborda situaţia corpului static determinat în problema plană.
Un corp static determinat trebuie să îndeplinească două condiţii:
a) Condiţia cantitativă: numărul de ecuaţii de echilibru independente trebuie să fie egal cu
numărul de necunoscute introduse de legături.
sau

Statica solidului rigid
Mecanica I 13
b) Condiţia calitativă: corpul să fie imobilizat.
Deoarece în plan numărul ecuaţiilor de echilibru independente scrise pentru un corp este trei
se vor face scheme de imobilizare ale unui corp, scheme în care legăturile introduse sunt
echivalente cu introducerea a trei legături simple.
1) Un corp imobilizat cu ajutorul a trei reazeme simple (figura 8.10.a).
Un corp cu trei reazeme simple este static determinat dacă direcţiile reazemelor simple nu
sunt toate trei paralele (posibilitate de translaţie pe direcţie perpendiculară pe direcţia
reazemelor – figura 8.10.b) sau dacă direcţiile celor trei reazeme simple nu sunt concurente în
acelaşi punct (posibilitate de rotaţie în jurul punctului de concurenţă – figura 8.10.c).
2) Un corp imobilizat cu ajutorul unei articulaţii şi a unui reazem simplu (figura 8.11.a).
Fig. 8.11. Corp cu o articulaţie şi un reazem simplu
a)
posibilitate de mişcare
(formă critică)
b)
Fig. 8.10. Corp cu trei reazeme simple
a)
posibilitate de mişcare
b)
posibilitate de mişcare
c)
forme critice

Statica solidului rigid
Mecanica I 14
Un corp cu o articulaţie şi un reazem simplu este static determinat dacă direcţia reazemului
simplu nu trece prin articulaţie (posibilitate de rotaţie în jurul punctului în care se află
articulaţia – figura 8.11.b).
3) Un corp imobilizat cu ajutorul unei încastrări (figura 8.12).
Un corp încastrat este întotdeauna static determinat.
Test de
autoevaluare 2
1. Câte grade de libertate suprimă corpului un reazem simplu?
a) 1;
b) 2;
c) 3.
2. Enunţul ,,Încastrarea poate fi realizată ca o legătură punctuală”
este:
a) adevărat;
b) fals.
3. Definiţi corpul static determinat.
Sugestiile de rezolvare și răspunsurile corecte sunt indicate la
finalul modulului.
8.5. Încărcări
Acţiunile asupra corpurilor se modelează prin sisteme de forţe denumite încărcări sau forţe
active (date).
Încărcările pot fi concentrate (acţiunile sunt concentrate pe o zonă suficient de redusă pentru a
putea fi considerată punctuală) sau distribuite (pe lungime în problema plană sau pe suprafaţă
în problema spaţială). Din punct de vedere al tipului încărcării, se disting încărcări de tip forţă
sau încărcări de tip moment.
Fig. 8.12. Corp cu încastrare

Statica solidului rigid
Mecanica I 15
Se vor prezenta câteva categorii de încărcări:
Forţa concentrată (figura 8.13.a)
Este forţa ce acţionează într-un punct al unui corp producând asupra acestuia atât efect de
forţă cât şi efect de moment.
Momentul concentrat (figura 8.13.b)
Momentul concentrat este o încărcare echivalentă acţiunii unui sistem de forţe ce se reduce la
un cuplu de forţe. Momentul concentrat se reprezintă într-un punct al corpului. Cum în
Mecanică toate corpurile sunt rigide, momentul concentrat este un vector liber, deci nu
interesează punctul său de aplicaţie (interesează doar faptul că asupra corpului acţionează
acest moment concentrat). Momentul concentrat produce asupra corpului pe care acţionează
doar efect de moment (nu produce efect de forţă).
Pentru încărcările distribuite se va prezenta modul de abordare a trei tipuri de încărcări
întâlnite mai des, cu precizarea că legile de variaţie ale acestora sunt practic infinite. Acestea
sunt încărcări distribuite pe lungime, fiind sisteme de forţe paralele:
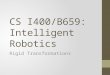
Forţa distribuită uniform (figura 8.14)
Forţa distribuită uniform are aceeaşi intensitate p pe toată lungimea de distribuţie l. Direcţia şi
sensul se indică prin direcţia şi sensul unor săgeţi ce reprezintă forţele care alcătuiesc această
încărcare. Dacă sensul nu este indicat în mod explicit, sensul încărcării este de la încărcare la
elementul pe care acţionează.
Forţa uniform distribuită este echivalentă cu acţiunea unei singure forţe având mărimea ,
direcţia şi sensul identice cu cele ale forţei distribuite şi punctul de aplicaţie la jumătatea
lungimii de distribuţie.
Fig. 8.13. Încărcări concentrate
a) b)
F
M

Statica solidului rigid
Mecanica I 16
Forţa distribuită liniar
Există două situaţii de forţă distribuită liniar:
- forţa distribuită triunghiular – distribuţia începe de la intensitatea zero şi variază liniar
până la intensitatea maximă „p” a forţei (figura 8.15);
- forţa distribuită trapezoidal – distribuţia începe de la intensitatea p1 a forţei şi variază
liniar până la intensitatea p2 a forţei (figura 8.16).
Forţa distribuită triunghiular este echivalentă cu acţiunea unei singure forţe având mărimea
, direcţia şi sensul identice cu cele ale forţei distribuite şi punctul de aplicaţie la o
treime din lungimea de distribuţie măsurată de la baza triunghiului ce reprezintă distribuţia. În
figura 8.15 se arată doar forţa echivalentă corespunzătoare unei forţe distribuite cu direcţia
verticală ce acţionează pe o lungime orizontală. Celelalte situaţii se tratează analog cu cele de
la forţa distribuită uniform (figura 8.14).
Forţa distribuită trapezoidal se consideră ca sumă a două forţe distribuite triunghiular (figura
8.16)
l
p
2l/3 l/3
Fig. 8.15. Forţa concentrată echivalentă unei forţe distribuite triunghiular
l l
l
p p p
l/2 l/2
pl pl
l/2 l/2
pl
Fig. 8.14. Forţa concentrată echivalentă unei forţe distribuite uniform
l/2
l/2

Statica solidului rigid
Mecanica I 17
Test de
autoevaluare 3
1. Definiţi noţiunea de „încărcare”.
2. Enunţul „momentul concentrat este un vector liber, deci nu
interesează punctul său de aplicaţie” este corect pentru:
a) corpuri deformabile;
b) corpuri rigide;
c) corpuri deformabile şi corpuri rigide.
3. Enunţul „Forţa uniform distribuită este echivalentă cu acţiunea
unei singure forţe având mărimea , direcţia şi sensul identice
cu cele ale forţei distribuite şi punctul de aplicaţie la jumătatea
lungimii de distribuţie” este:
a) adevărat;
b) fals.
Sugestiile de rezolvare și răspunsurile corecte sunt indicate la
finalul modulului.
Bibliografie modul
[1]. Hangan, S., Slătineanu, I., ,,Mecanică”, Editura Didactică şi
Pedagogică, Bucureşti, 1983, pag. 66-73;
[2]. Szolga, V., Szolga, A. M., ,,Mecanica Teoretică. Note de curs şi
îndrumător de seminar. Partea I”, Editura Conspress, Bucureşti,
2003, pag. 100-117;
[3]. Vâlcovici, V., Bălan, Şt., Voinea, R., ,,Mecanica Teoretică”,
Editura Tehnică, Bucureşti, 1963, pag. 161-179.
l
p2
l/3
Fig. 8.16. Forţele concentrate echivalente unei forţe distribuite trapezoidal
p1
l/3 l/3

Statica solidului rigid
Mecanica I 18
Rezumat modul
În acest modul s-a tratat problema echilibrului solidului rigid liber şi
a solidului rigid cu legături ideale. Pentru solidul rigid liber s-au
prezentat combinaţiile de ecuaţii ce rezolvă această problemă.
S-au definit, ca mod de realizare şi reprezentare, legăturile ideale ale
solidului rigid în plan şi s-au introdus noţiunile de mecanism, corp
static determinat, corp static nedeterminat şi formă critică. Pentru un
corp static determinat s-au prezentat combinaţiile de legături ideale
posibile (pentru problema plană).
Finalul cursului a fost ocupat cu definirea încărcărilor şi cu
expunerea modului de lucru cu unele încărcări mai des întâlnite.
Rezolvare
test de autoevaluare
1
1. a, b, c;
2. b;
3. Consultare aspecte teoretice pag. 5.
Rezolvare
test de autoevaluare
2
1. a;
2. b;
3. Consultare aspecte teoretice pag. 12.
Rezolvare
test de autoevaluare
3
1. Consultare aspecte teoretice pag. 14;
2. b;
3. b.