Embed Size (px)
Citation preview
Hipercuadrice intr-un spatiu a�n euclidian. Invarianti a�ni si izometrici.Conice in E2. Clasi�carea izometrica a conicelor.
Exemple
Curs 9Hipercuadrice in spatii a�ne euclidiene. Clasi�carea metrica a
conicelor.
Oana Constantinescu
Oana Constantinescu Curs 9
1 Hipercuadrice intr-un spatiu a�n euclidian. Invarianti a�ni si
izometrici.
2 Conice in E2. Clasi�carea izometrica a conicelor.
3 Exemple
De�nitia hipercuadricei
Reamintim din primul semestru de�nitia hipercuadricei a�ne.
Pentru inceput ne situam intr-un K−spatiu a�n n-dimensional
A =(X ,−→X ,Φ
), K-corp comutativ.
De�nition
O submultime Γ ⊂ X se numeste hipercuadrica in A (sau
hipercuadrica a�na) daca Γ este locul geometric al punctelor
M ∈ X ale caror coordonate (x1, x2, · · · , xn) in raport cu un reper
cartezian R = {O; e1, · · · , en} veri�ca o ecuatie de tipul
H(M) := f (x1, · · · , xn) :=n∑
i=1
n∑j=1
aijxix j + 2
n∑i=1
ai0xi + a00 = 0,
(1)
unde coe�cientii aij ∈ K, i , j ∈ 1, n nu sunt toti nuli si
aij = aji , ∀i , j ∈ 1, n.
Ecuatia de gradul al II-lea (1) se numeste ecuatia hipercuadricei
a�ne in raport cu R.
De�nitia hipercuadricei a�neAltfel zis, o hipercuadrica este nucleul unei forme patratice a�ne
H : X → K,
H(M) = h(−−→OM) + f (
−−→OM) + a00, ∀M ∈ X ,
unde h :−→X → K este forma patratica ce are in raport cu baza reperului
R ecuatia
h(−−→OM) =
n∑i=1
n∑j=1
aijxix j
si f :−→X → K este forma liniara de�nita in raport cu baza {e1, · · · , en}
prin
f (−−→OM) =
n∑i=1
ai0xi .
Pentru simplitatea scrierii vom folosi notatia matriceala.Consideram A = (aij), matricea simetrica de ordinul n cu coe�cienti in K,A 6= On, B = (a10 · · · an0) ∈M1,n(K) si X =t (x1 · · · xn) ∈Mn,1(K)matricea coloana a coordonatelor unui punct arbitrar M ∈ X . Deci
M ∈ Γ⇔ H(X ) :=t XAX + 2BX + a00 = 0. (2)
Bineinteles ca trebuie sa demonstram ca de�nitia anterioara este
corecta.
Theorem
Proprietatea unei submultimi Γ ⊂ X de a � hipercuadrica a�na nu
depinde de reperul cartezian in raport cu care i se da ecuatia.
Intr-adevar, �e R′ ={O ′; f1, · · · , fn
}un alt reper cartezian in X .
Schimbarea de repere induce schimbarea de coordonate
X = SX ′ + S0, (3)
unde X ′ si X sunt matricele coloane ale coordonatele aceluiasi punct inraport cu R′, respectiv R, S este matricea de trecere de la baza reperuluiR la baza reperului R′ iar S0 este matricea coloana a coordonatelor luiO ′ in raport cu reperul R.Atunci, in raport cu R′, Γ are ecuatia
tX ′A′X ′ + 2B ′X ′ + a′00
= 0,
unde
A′ = tSAS , (4)
B ′ = tS0AS + BS ,
a′00
= H(S0).
Rezulta ca A′ 6= On si este simetrica.
Invarianti a�ni ai unei hipercuadrice
Fie matricea D =
(A tB
B a00
)∈Mn+1(K) si
S ′ =
S S00 · · · 0︸ ︷︷ ︸
n
1
∈Mn+1(K). Observam ca detS ′ = detS 6= 0.
Veri�cati caD ′ =t S ′DS ′. (5)
Notam detA = δ si detD = ∆.Observam ca
detA′ = detA(detS)2, detD ′ = detD(detS)2, (6)
Din relatiile (4), (5) si (6) rezulta:
Theorem
Rangurile matricelor A si D nu se schimba la schimbari de repere
carteziene. Daca δ 6= 0 atunci si ∆δ ramane acelasi la o schimbare
de repere carteziene.
Invarianti a�ni
De�nition
Numim rangA := r rangul formei patratice h asociata formei
patratice a�ne H si rangD := ρ rangul lui H sau rangul
hipercuadricei Γ. Datorita teoremei anterioare spunem ca r , ρ si ∆δ
sunt invarianti a�ni ai hipercuadricei Γ.
Observam ca δ si ∆ nu sunt invarianti a�ni ai hipercuadricei.
Rezultatele anterioare pot � interpretate si astfel. Identi�cam o
schimbare de repere carteziene ale lui X cu actiunea unui
automor�sm a�n al lui X asupra lui X . Spunem ca doua
hipercuadrice a�ne sunt echivalente daca exista un automor�sm
a�n ce transforma prima hipercuadrica in cea de a doua. Doua
hipercuadrice a�ne echivalente au aceiasi invarianti a�ni.
Invarianti ortogonali (izometrici)
Consideram acum ca studiem hipercuadricele unui spatiu a�n
euclidian E =(E ,−→E ,Φ
)si reperele carteziene in raport cu care
dam ecuatiile unei hipercuadrice sunt ortonormate.
Amintim ca doua hipercuadrice sunt congruente daca exista o
izometrie care transforma prima hipercuadrica in cea de a doua. Ne
intereseaza ce marimi (proprietati) raman invariante in aceeasi clasa
de echivalenta relativ la relatia de congruenta pe multimea
hipercuadricelor unui spatiu a�n euclidian.
Sau, altfel spus, ce marimi raman neschimbate la o schimbare de
repere ortonormate. Aceste marimi le vom numi invariantiortogonali sau izometrici ai unei hipercuadrice.In cazul acesta matricea S a schimbarii de baza este ortogonala,
S ∈ O(n)⇔t S = S−1. Deci detS = ±1. Din (6) rezulta ca
detD = detD ′, detA = detA′.

Invarianti ortogonali
Mai mult, din (4) rezulta ca matricile A si A′ sunt asemenea, deci
au acelasi polinom caracteristic.Amintim ca polinomul caracteristic al unei matrice A ∈Mn(R) sescrie
p(λ) = det (A− λIn) = (−1)n`λn − δ1λ
n−1 + δ2λn−2 − · · · + (−1)nδn
´, (7)
unde δk este suma minorilor diagonali de ordinul k ai lui A,
k ∈ 1, n. In particular
δ1 = TraceA := I este urma matricei A iar δn = δ = detA. Am
demonstrat rezultatul:
Theorem
Coe�cientii polinomului caracteristic al matricei A (in particular I ,
δ) si ∆ = detD nu se schimba la o schimbare de repere
ortonormate, deci sunt invarianti ortogonali ai hipercuadricei.
Conice in E2
Cadrul de lucru al acestei sectiuni este un spatiu a�n euclidian de
dimensiune 2. O hipercuadrica in E2 se numeste conica.Fie Γ o conica ce are in raport cu reperul ortonormat R =
{O; i , j
}ecuatia:
Γ : H(x , y) := a11x2 + 2a12xy + a22y
2 + 2a10x + 2a20y + a00 = 0.(8)
Amintim ca A =
(a11 a12a21 a22
)∈ S2(R), B = (a10 a20),
D =
a11 a12 a10a21 a22 a20a10 a20 a00
∈ S3(R).
Mai mult, am demonstrat ca I := TraceA = a11 + a22 si
δ = detA = a11a22 − a212 sunt invarianti ortogonali ai conicei.
Invariant centro-ortogonal
Pe langa invariantii ortogonali amintiti deja mai introducem si un
invariant centro-ortogonal.
Proposition
Numarul real ∆1 =
∣∣∣∣ a11 a12a21 a22
∣∣∣∣+
∣∣∣∣ a11 a10a10 a00
∣∣∣∣+
∣∣∣∣ a22 a20a20 a00
∣∣∣∣,adica suma minorilor diagonali de ordinul 2 ai lui D, este un
invariant centro-ortogonal al lui Γ, adica ramane neschimbat la o
rotatie de repere carteziene ortonormate. Daca in plus δ = ∆ = 0,
atunci ∆1 este chiar un invariant ortogonal al conicei.
In continuare vom clasi�ca conicele spatiului a�n euclidian E2 in
functie de invariantii ortogonali si centro-ortogonali introdusi.
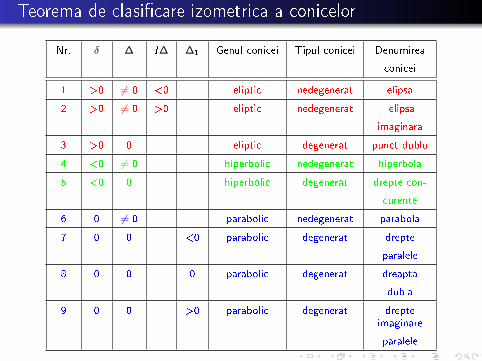
Teorema de clasi�care izometrica a conicelor
Nr. δ ∆ I∆ ∆1 Genul conicei Tipul conicei Denumirea
conicei
1 >0 6= 0 <0 eliptic nedegenerat elipsa
2 >0 6= 0 >0 eliptic nedegenerat elipsa
imaginara
3 >0 0 eliptic degenerat punct dublu
4 <0 6= 0 hiperbolic nedegenerat hiperbola
5 <0 0 hiperbolic degenerat drepte con-
curente
6 0 6= 0 parabolic nedegenerat parabola
7 0 0 <0 parabolic degenerat drepte
paralele
8 0 0 0 parabolic degenerat dreapta
dubla
9 0 0 >0 parabolic degenerat drepte
imaginare
paralele
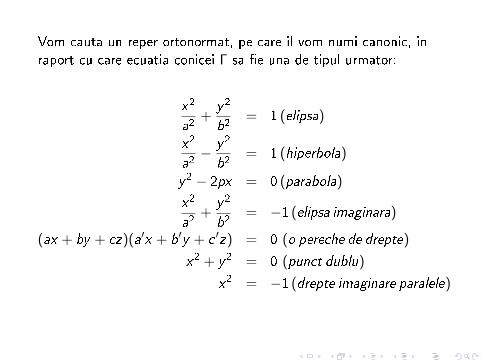
Vom cauta un reper ortonormat, pe care il vom numi canonic, in
raport cu care ecuatia conicei Γ sa �e una de tipul urmator:
x2
a2+
y2
b2= 1 (elipsa)
x2
a2− y2
b2= 1 (hiperbola)
y2 − 2px = 0 (parabola)
x2
a2+
y2
b2= −1 (elipsa imaginara)
(ax + by + cz)(a′x + b′y + c ′z) = 0 (o pereche de drepte)
x2 + y2 = 0 (punct dublu)
x2 = −1 (drepte imaginare paralele)
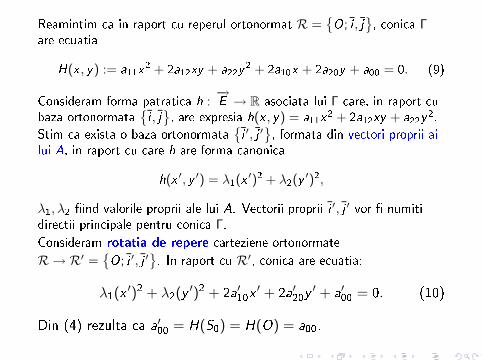
Reamintim ca in raport cu reperul ortonormat R ={O; i , j
}, conica Γ
are ecuatia
H(x , y) := a11x2 + 2a12xy + a22y
2 + 2a10x + 2a20y + a00 = 0. (9)
Consideram forma patratica h :−→E → R asociata lui Γ care, in raport cu
baza ortonormata{i , j}, are expresia h(x , y) = a11x
2 + 2a12xy + a22y2.
Stim ca exista o baza ortonormata{i ′, j ′
}, formata din vectori proprii ai
lui A, in raport cu care h are forma canonica
h(x ′, y ′) = λ1(x ′)2 + λ2(y ′)2,
λ1, λ2 �ind valorile proprii ale lui A. Vectorii proprii i ′, j ′ vor � numitidirectii principale pentru conica Γ.
Consideram rotatia de repere carteziene ortonormate
R → R′ ={O; i ′, j ′
}. In raport cu R′, conica are ecuatia:
λ1(x ′)2 + λ2(y ′)2 + 2a′10x′ + 2a′20y
′ + a′00 = 0. (10)
Din (4) rezulta ca a′00 = H(S0) = H(O) = a00.
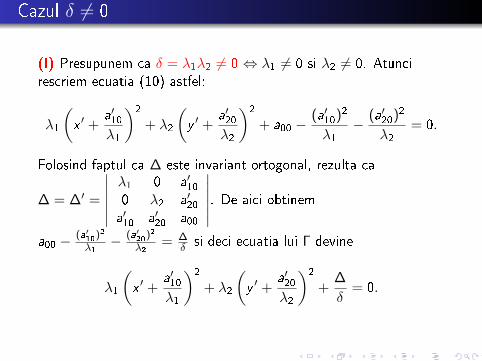
Cazul δ 6= 0
(I) Presupunem ca δ = λ1λ2 6= 0 ⇔ λ1 6= 0 si λ2 6= 0. Atunci
rescriem ecuatia (10) astfel:
λ1
(x ′ +
a′10λ1
)2
+ λ2
(y ′ +
a′20λ2
)2
+ a00 −(a′10)2
λ1− (a′20)2
λ2= 0.
Folosind faptul ca ∆ este invariant ortogonal, rezulta ca
∆ = ∆′ =
∣∣∣∣∣∣λ1 0 a′100 λ2 a′20a′10 a′20 a00
∣∣∣∣∣∣. De aici obtinem
a00 −(a′10)2
λ1− (a′20)2
λ2= ∆
δ si deci ecuatia lui Γ devine
λ1
(x ′ +
a′10λ1
)2
+ λ2
(y ′ +
a′20λ2
)2
+∆
δ= 0.
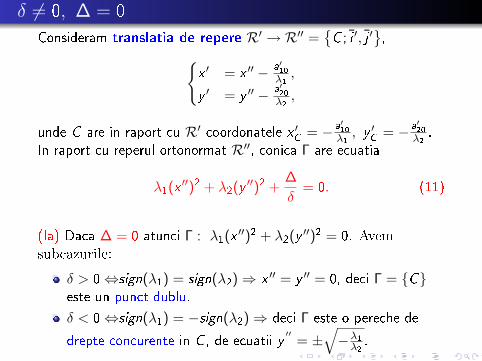
δ 6= 0, ∆ = 0
Consideram translatia de repere R′ → R′′ ={C ; i ′, j ′
},{
x ′ = x ′′ − a′10λ1,
y ′ = y ′′ − a′20λ2,
unde C are in raport cu R′ coordonatele x ′C = −a′10λ1, y ′C = −a′20
λ2.
In raport cu reperul ortonormat R′′, conica Γ are ecuatia
λ1(x ′′)2 + λ2(y ′′)2 +∆
δ= 0. (11)
(Ia) Daca ∆ = 0 atunci Γ : λ1(x ′′)2 + λ2(y ′′)2 = 0. Avem
subcazurile:
δ > 0⇔sign(λ1) = sign(λ2)⇒ x ′′ = y ′′ = 0, deci Γ = {C}este un punct dublu.
δ < 0⇔sign(λ1) = −sign(λ2)⇒ deci Γ este o pereche de
drepte concurente in C , de ecuatii y′′
= ±√−λ1
λ2.
δ 6= 0, ∆ 6= 0
(Ib) Daca ∆ 6= 0, rescriem ecuatia (11) astfel:
(x ′′)2
− ∆δλ1
+(y ′′)2
− ∆δλ2
− 1 = 0. (12)
Consideram subcazurile:
δ > 0⇒sign(λ1) = sign(λ2) = sign(I ), deci
sign(− ∆
δλ1
)= sign
(− ∆
δλ2
)= −sign(I∆).
daca I∆ < 0, atunci Γeste o elipsa de semiaxe√− ∆δλi
,
i ∈ {1, 2};daca I∆ > 0. atunci Γ este o conica vida, mai exact o elipsaimaginara.
δ < 0⇒sign(λ1) = −sign(λ2)⇒ Γ este o hiperbola de
semiaxe∣∣∣√− ∆
δλi
∣∣∣ , i ∈ {1, 2}.
Ne reamintim ca originea reperului canonic al unei elipse sau
hiperbole este centrul de simetrie al conicei, deci C estecentru de simetrie pentru Γ.
Axele reperului canonic sunt axe de simetrie pentru conica, si
in cazurile discutate sunt drepte prin C , care au ca vectoridirectori doi vectori proprii ortogonali ai lui A.
In unul din cursurile viitoare vom reveni la studiul centrelor de
simetrie si a axelor de simetrie ale unei hipercuadrice.
In continuare vom studia cazul δ = 0.

Cazul δ = 0
(II) Daca δ = 0, rezulta ca una din valorile proprii ale lui A este
zero. De exemplu, presupunem ca λ1 = 0 si λ2 = I 6= 0.
In raport cu reperul R′ conica are ecuatia
λ2(y ′)2 + 2a′10x′ + 2a′20y
′ + a00 = 0,
sau
λ2
(y ′ +
a′20λ2
)2
+ 2a′10x′ + a00 −
(a′20)2
λ2= 0.
Folosind ca λ2 = I , ∆ = ∆′ si ∆1 = ∆′1, obtinem ∆ = −I (a′10)2 si
a00 −(a′20)2
λ2= ∆1
I− ∆
I 2. Astfel, ecuatia conicei in raport cu R′
devine (y ′ +
a′20λ2
)2
+ 2a′10Ix ′ +
∆1
I 2− ∆
I 3= 0. (13)
δ = 0,∆ 6= 0(IIa) Daca ∆ 6= 0, rezulta ca a′
106= 0 si rescriem ecuatia (13) astfel:(
y ′ +a′20
I
)2
+ 2a′10
I
[x ′ +
1
2a′10
(∆1
I 2− ∆
I 3
)]= 0.
Consideram translatia de repere R′ ={O; i ′, j ′
}→ R′′ =
{V ; i ′, j ′
},{
x ′ = x ′′ − 1
2a′10
(∆1
I2− ∆
I3
),
y ′ = y ′′ − a′20
I.
V are in raport cu R′ coordonatele x ′V = − 1
2a′10
(∆1
I2− ∆
I3
)si y ′
V = − a′20
I.
In raport cu reperul cartezian ortonormat R′′, conica are ecuatia
(y ′′)2 ± 2px ′′ = 0, p =
∣∣∣∣−a′10
I
∣∣∣∣ ,deci Γ este o parabola. Sa observam ca putem scrie parametrul paraboleiintr-un mod convenabil:
(a′10
)2 = −∆
I⇒| a′
10|=√−∆
I⇒ p =
√−∆
I 3.
δ = ∆ = 0Ne reamintim ca reperul in care o parabola are ecuatia canonica are caorigine varful parabolei, iar ca axe axa de simetrie a parabolei si tangentain varf la parabola.
Deci originea V a reperului canonic R′′ este varful parabolei, iar axa
Vx ′′ = V + [i ′] trece prin V si are ca vector normal vectorul propriu al lui
A corespunzator valorii proprii nenule.
(IIb) Daca ∆ = 0, rezulta a′10 = 0, deci ecuatia (13) devine(y ′ +
a′20I
)2
+∆1
I 2= 0.
∆1 > 0: conica vida (drepte paralele imaginare);
∆1 = 0:(y ′ +
a′20I
)2= 0, deci conica este o dreapta dubla de
ecuatie y ′ = −a′20I;
∆1 < 0:
(y ′ +
a′20I−√−∆1
I 2
)(y ′ +
a′20I
+√−∆1
I 2
)= 0,
deci conica e o pereche de drepte paralele, de ecuatii
y ′ = −a′20I±√−∆1
I 2.
Exemple
(1) In raport cu reperul ortonormat R ={O; i , j
}se da conica
Γ : 5x2 + 4xy + 8y2 − 32x − 56y + 80 = 0.
Aduceti aceasta conica la forma canonica si reprezentati-o gra�c.
Calculam invariantii ortogonali necesari determinarii conicei.
Avem A =
(5 2
2 8
), deci I = 13 si δ = 36. De asemenea
D =
5 2 −162 8 −28−16 −28 80
, deci ∆ = −1296. Deoarece δ > 0 si
I∆ < 0, rezulta ca Γ este o elipsa.
Polinomul caracteristic al lui A este
p(λ) = λ2 − Iλ+ δ = λ2 − 13λ+ 36, deci valorile proprii ale lui A
sunt λ1 = 4 si λ2 = 9.
Determinam acum directiile principale ale conicei, adica vectorii
proprii corespunzatori celor doua valori proprii. Rezolvand sistemul
scris matricial (A− 4I2)U = O, unde U =
(l
m
)6=(
0
0
)contine coordonatele unui vector propriu al lui A corespunzator lui
λ1, obtinem U(4) ={u = −2αi + αj | α ∈ R
}. Alegem
i ′ =√55
(2i − j). Stim ca vectorii proprii corespunzatori unor valori
proprii distincte ale unei matrice simetrice sunt ortogonali, de aceea
putem alege direct j ′ =√55
(i + 2j) un vector propriu corespunzator
lui λ2.Baza reperului canonic este deci
{i ′, j ′
}.
Facem rotatia de repere R ={O; i , j
}→ R′ =
{O; i ′, j ′
}, ce
determina schimbarea de coordonate
X =
√5
5
(2 1
−1 2
)X ′ ⇔
{x =
√55
(2x ′ + y ′),
y =√55
(−x ′ + 2y ′).(14)
Astfel, inlocuind pe x , y in functie de x ′, y ′ in ecuatia initiala a
conicei, obtinem ca ecuatia conicei in raport cu R′ este
4(x ′)2 + 9(y ′)2 − 8√5
5x ′ − 144
√5
5y ′ + 80 = 0⇔
4
(x ′ −
√5
5
)2
+ 9
(y ′ − 8
√5
5
)2
− 36 = 0.
Facem translatia de repere R′ ={O; i ′, j ′
}→ R′′ =
{C ; i ′, j ′
},{
x ′′ = x ′ −√55,
y ′′ = y ′ − 8√5
5.
(15)
In raport cu reperul canonic R′′ ={C ; i ′, j ′
}elipsa are ecuatia
(x ′′)2
9+
(y ′′)2
4− 1 = 0 (16)
Pentru a reprezenta gra�c aceasta elipsa, in sistemul de axe
ortogonale (xOy) asociate reperului R, vom determina
coordonatele lui C si ecuatiile axelor reperului canonic in raport cu
reperul initial R.Astfel, centrul de simetrie al elipsei are, in raport cu R′′,coordonatele x ′′C = y ′′C = 0. Folosind formulele schimbarilor de
coordonate (15) si (14), obtinem x ′C =√55, y ′C = 8
√5
5si in �nal
xC = 2 si yC = 3. Astfel, am obtinut C (2, 3) in raport cu R.In cursurile urmatoare vom a�a si alta metoda de determinare a
centrului de simetrie al unei conice.
Axele reperului canonic au, in raport cu R′′, ecuatiile Cx ′′ : y ′′ = 0
si Cy ′′ : x ′′ = 0. Putem folosi aceleasi formule (15), (14) pentru a
obtine ecuatiile acestora in raport cu reperul initial sau, mai simplu,
observam ca Cx ′′ trece prin C si are ca vector director vectorul
propriu i ′, iar Cy ′′ trece prin C si are ca vector director pe j ′.Obtinem
Cx ′′ : x + 2y − 8 = 0, Cy ′′ : 2x − y − 1 = 0.
Pentru o reprezentare gra�ca cat mai riguroasa, putem sa ne
folosim si de intersectiile elipsei cu axele reperului initial, Ox si Oy .
Obtinem Γ ∩ Oy = {P(0, 2), Q(0, 5)} si Γ ∩ Ox = ∅.
De asemenea, elipsa are varfurile A(3, 0), A′(−3, 0) si B(0, 2),B ′(0,−2), in raport cu R′′. Folosindu-ne de cele doua schimbari de
coordonate succesive, calculam xA = 2 + 6√5
5si yA = 3− 3
√5
5.
Analog procedam cu celelalte trei varfuri ale elipsei.
De asemenea, focarele elipsei au in raport cu reperul canonic
coordonatele x ′′F =√5, y ′′F = 0 si x ′′F ′ = −
√5, y ′′F ′ = 0, iar in
raport cu reperul initial obtinem F (4, 2) si F ′(0, 4).
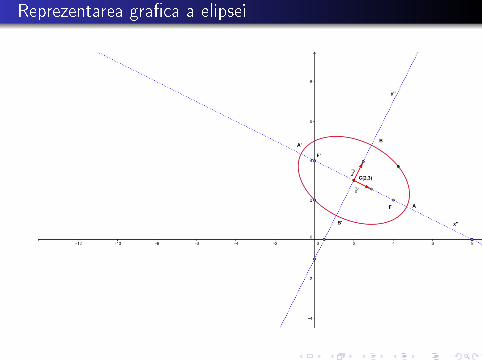
Reprezentarea gra�ca a elipsei
(2) In raport cu reperul ortonormat R ={O; i , j
}se da conica
Γ : 6xy + 8y2 − 12x − 26y + 11 = 0.
Aduceti aceasta conica la forma canonica si reprezentati-o gra�c.
Determinam A =
(0 3
3 8
)si D =
0 3 −63 8 −13−6 −13 11
, deci
I = 8, δ = −9, ∆ = 81. Deoarece δ < 0 si ∆ 6= 0 rezulta ca Γ este
o hiperbola.
Polinomul caracteristic al lui A este p(λ) = λ2 − 8λ− 9, deci
λ1 = −1 si λ2 = 9 sunt valorile proprii ale lui A.
Ca si in exemplul precedent determinam subspatiul liniar al
vectorilor proprii corespunzatori lui λ1 = −1,U(−1) =
{−3αi + αj | α ∈ R
}si alegem i ′ =
√1010
(3i − j). Fie
j ′ =√1010
(i + 3j) ⊥ i ′ un vector propriu corespunzator lui λ2 = 9.

Facem rotatia de repere R ={O; i , j
}→ R′ =
{O; i ′, j ′
}, ce
determina schimbarea de coordonate
X =
√10
10
(3 1
−1 3
)X ′ ⇔
{x =
√1010
(3x ′ + y ′),
y =√1010
(−x ′ + 3y ′).(17)
In raport cu R′, hiperbola are ecuatia
−(x ′)2 + 9(y ′)2 −√10x ′ − 9
√10y ′ + 11 = 0⇔
−
(x ′ +
√10
2
)2
+ 9
(y ′ −
√10
2
)2
− 9 = 0.
Consideram acum translatia de repere
R′ ={O; i ′, j ′
}→ R′′ =
{C ; i ′, j ′
},{
x ′′ = x ′ +√102,
y ′′ = y ′ −√102.
(18)
In raport cu reperul canonic R′′ ={C ; i ′, j ′
}hiperbola are ecuatia
−(x ′′)2
9+
(y ′′)2
1− 1 = 0 (19)
Observam ca hiperbola are focarele si varfurile pe axa Cy ′′.Procedand ca in exemplul anterior, folosindu-ne de formulele (17),
(18), obtinem centrul de simetrie al hiperbolei C (−1, 2) in raport
cu R.
Axele reperului canonic sunt Cx ′′ = C + [i ′] si Cy ′′ = C + [j ′′], deecuatii
Cx ′′ : x + 3y − 5 = 0, Cy ′′ : 3x − y + 5 = 0.
Asimptotele hiperbolei au, in raport cu reperul R′′, ecuatiilea1 : y ′′ = 1
3x ′′ si a2 : y ′′ = −1
3x ′′. Aplicand formulele schimbarilor
de repere obtinem
a1 : y = 2, a2 : 3x + 4y − 5 = 0.
Intersectiile hiperbolei cu axele Ox , Oy sunt Γ ∩ Ox ={P(11
12, 0)}
si Γ ∩ Oy ={Q(0, 11
4), R(0, 1
2)}.
Varfurile hiperbolei, in raport cu reperul canonic R′′, aucoordonatele A(0, 1) si A′(0,−1). Pentru o reprezentare gra�ca
riguroasa determinati coordonatele acestora in raport cu reperul
initial R. De asemenea focarele hiperbolei au, in raport cu reperul
initial, coordonatele F (0, 5) si F ′(−2,−1).
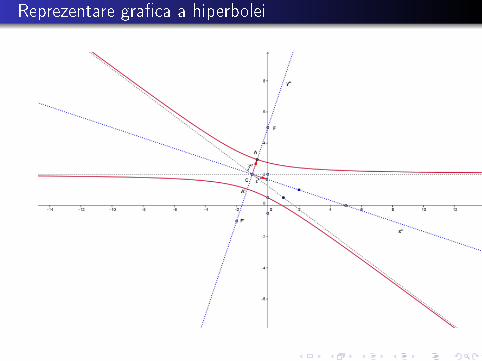
Reprezentare gra�ca a hiperbolei
(3) In raport cu reperul ortonormat R ={O; i , j
}se da conica
Γ : 9x2 − 6xy + y2 + 20x = 0.
Aduceti aceasta conica la forma canonica si reprezentati-o gra�c.
A =
(9 −3−3 1
)si D =
9 −3 10
−3 1 0
10 0 0
. Rezulta ca I = 10.
δ = 0, ∆ = −100. Deoarece δ = 0 si ∆ 6= 0, Γ este o parabola.
Valorile proprii ale lui A sunt λ1 = 0 si λ2 = 10.
Determinam U(0) ={αi + 3αj | α ∈ R
}si alegem de exemplu
i ′ =√1010
(i + 3j) si j ′ =√1010
(−3i + j) ⊥ i ′.
Rotatia de repere ortonormate
R ={O; i , j
}→ R′ =
{O; i ′, j ′
}determina schimbarea de
coordonate
X =
√10
10
(1 −33 1
)X ′ ⇔
{x =
√1010
(x ′ − 3y ′),
y =√1010
(−3x ′ + y ′).(20)
In raport cu R′, hiperbola are ecuatia
(y ′)2 +2√10
10x ′ − 6
√10
10y ′ = 0⇔
(y ′ − 3
√10
10
)2
+2√10
10x ′ − 9
10= 0⇔
(y ′ − 3
√10
10
)2
+2√10
10
(x ′ − 9
√10
20
)= 0.

Consideram acum translatia de repere
R′ ={O; i ′, j ′
}→ R′′ =
{V ; i ′, j ′
},{
x ′′ = x ′ − 9√10
20,
y ′′ = y ′ − 3√10
10.
(21)
In raport cu reperul canonic R′′ ={V ; i ′, j ′
}parabola are ecuatia
(y ′′)2 +2√10
10x ′′ = 0.
Reamintim ca parabola nu are centru de simetrie, iar originea
reperului canonic este varful parabolei. Acesta are in raport cu R′′coordonatele x ′′V = y ′′V = 0, iar din (20) si (21) obtinem xV = − 9
20
si yV = 3320. Deci V (− 9
20, 3320
) in raport cu reperul initial.
Vx ′′ = V + [i ′], deci Vx ′′ : 3x − y + 3 = 0. Sau putem considera
ca Vx ′′ trece prin V si are ca vector normal j ′.Vy ′′ = V + [j ′], sau e perpendiculara pe Vx ′′ in V . Obtinem
Vy ′′ : x + 3y − 92
= 0.
Determinam si Γ ∩ Ox ={O,P(−20
9, 0)}si Γ taie Oy in punctul
dublu O. Deci parabola este tangenta axei Oy in O.
Focarul parabolei are coordonatele F (−√1020, 0) in raport cu reperul
canonic si F (−12, 32
) in raport cu reperul R. Ecuatia directoarei in
raport cu reperul canonic este d : x ′′ =√1020
, iar in raport cu
reperul initial avem d : x + 3y − 5 = 0.
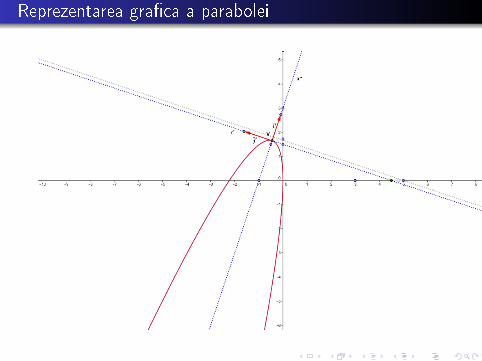
Reprezentarea gra�ca a parabolei