Embed Size (px)
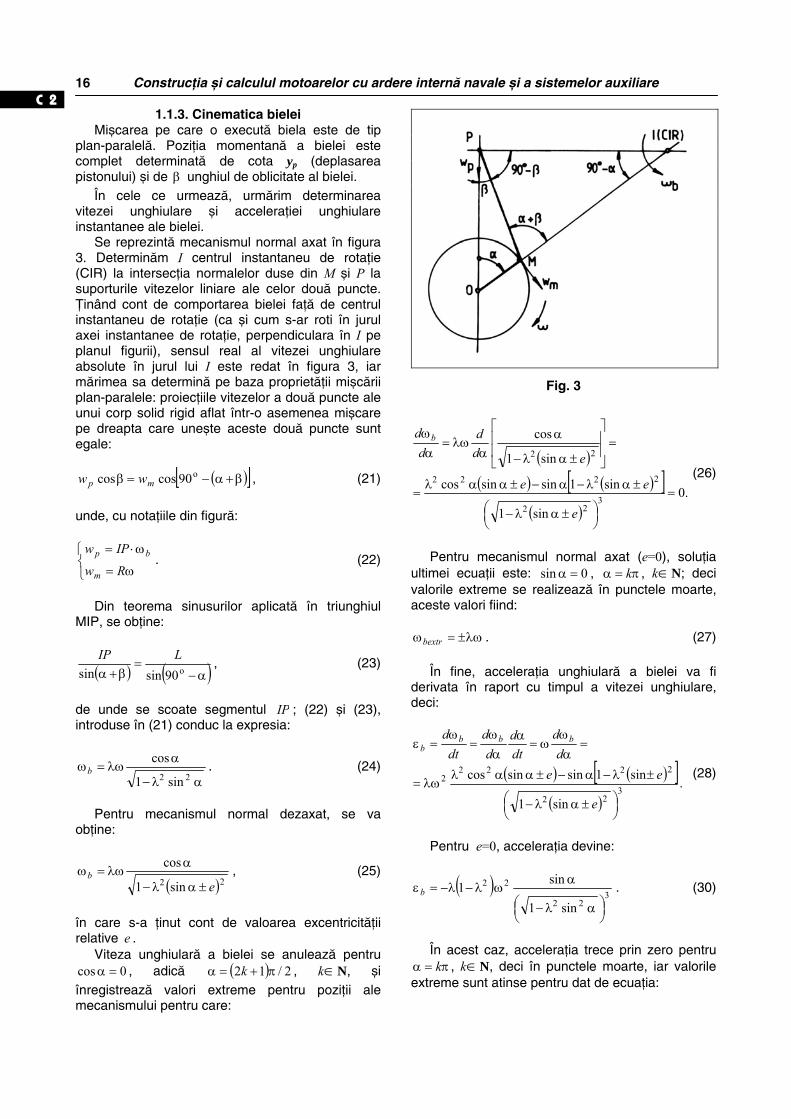
DESCRIPTION
CURS CCMAI 1 - UMC Constanta - Buzbuchi
Citation preview

NICOLAE BUZBUCHI LIVIU-CONSTNATIN STAN
CONSTRUCÞIA MOTOARELOR NAVALE ªI A SISTEMELOR
AUXILIARE ALE ACESTORA
Editura
NAUTICA
Constanţa 2008

2
Referenþi ºtiiþifici: Prof. Univ. Dr. Ing. Dinu TARAZA
Prof. Univ. Dr. Ing. Gheorghe A. Radu
Editura NAUTICA, 2008
Editură recunoscută CNCSIS
Str. Mircea cel Bătrân nr.104
900663 Constanţa, România
tel.: +40-241-66.47.40
fax: +40-241-61.72.60
e-mail: [email protected]
Descrierea CIP a Bibliotecii Naţionale a României: BUZBUCHI, NICOLAE Construcţia motoarelor navale şi a sistemelor auxiliare ale acestora / Nicolae Buzbuchi, Liviu Constantin Stan – Constanţa, Nautica, 2008
Bibliogr. ISBN 978-973-7872-79-1
I. Stan, Liviu 621.431.74:629.5

3
PREFAÞà În cvasiabsenþa, caracteristicã ultimului deceniu în þarã, a literaturii tehnice, apariþia unor lucrãri dedicate motoarelor cu ardere internã navale este cu atât mai meritorie cu cât domeniul, de mare importanþã tehnicã, pare relativ restrâns pentru condiþiile actuale din România. Dacã þinem însã cont de dezvoltarea pe plan mondial a flotelor maritime ºi fluviale comerciale, se poate constata necesitatea cunoaºterii cât mai profunde a principiilor de funcþionare a acestor motoare, a componentelor ºi sistemelor ce le deservesc, a utilizãrii ºi întreþinerii corecte, dat fiind faptul cã oferta în domeniu pe piaþa internaþionalã a forþei de muncã este deosebit de mare, specialiºtii români fiind frecvent solicitaþi de companii maritime strãine. În aceste condiþii, responsabilitatea învãþãmântului superior tehnic de marinã comercialã creºte corespunzãtor cu dotarea noilor nave cu motoare de mare putere, supraalimentate, care sã corespundã cerinþelor impuse. Apar noi probleme tehnice atât în faþa proiectanþilor sistemelor de propulsie navalã dotate cu motoare cu ardere internã cu piston, cât, mai ales, în faþa personalului de exploatare, pentru asigurarea condiþiilor de funcþionare în siguranþã, confort, cu consumuri ºi nivel poluant reduse, astfel cã aspectele corespunzãtoare trebuie bine cunoscute ºi însuºite încã de pe bãncile ºcolii de cãtre viitorul personal tehnic din exploatarea acestor sisteme deosebit de complexe. Fãrã a ne propune sã facem un istoric al literaturii tehnice sau o analizã criticã a apariþiilor editoriale, care sã susþinã un proces de învãþãmânt eficient în domeniul motoarelor navale, dorim sã punctãm câteva momente mai semnificative. Astfel, în 1959, apãrea în Editura Tehnicã, volumul Motoare Diesel, autori A. Vanºeidt º.a. (traducere din limba rusã), care îºi propunea scopul mai temerar la acea vreme, de realizare a unei priviri de ansamblu asupra acestui tip de motoare cu ardere internã, lucrarea cuprinzând aproape toate capitolele necesare unui studiu exhaustiv, dar clasic, tributar soluþiilor tehnice ºi metodelor de calcul ºi analizã ale momentului respectiv. De atunci, aplecarea studiului spre motoarele cu ardere internã în aplicaþia navalã a fost prea puþin evidentã, doar unii autori fãcând trimiteri specifice în cãrþile lor; aici trebuie sã menþionãm aportul unor profesori ºi cercetãtori de marcã, cum ar fi M. Bãnãrescu, vizibil în special în lucrarea Motoare cu ardere internã, vol. II, Editura Tehnicã, 1959, în domeniul soluþiilor constructive specifice; D. Taraza în Dinamica motoarelor cu ardere internã, Editura Didacticã ºi Pedagogicã, 1985, cu surprinderea atentã a unor aspecte specifice comportamentului dinamic al motoarelor navale; R. Gaiginsch ºi Gh. Zãtreanu, mai ales în Motoare cu ardere internã. Calcul ºi construcþie, vol. II, Editura Shakti, 1997; nu se poate omite încercarea meritorie a lui C. Alexandru, care, In lucrarea Maºini ºi instalaþii navale de propulsie, Editura Tehnicã, 1991, a atins atât probleme de procese termice, cât ºi unele aspecte de dinamicã ºi instalaþii auxiliare ale acestor sisteme de propulsie. Lucrãrile menþionate nu sunt unicele publicate în limba românã în domeniul motoarelor diesel navale, dar s-a considerat necesarã menþionarea lor, pentru componenta didacticã pe care o înglobeazã. Acestor lucrãri de referinþã, li se pot adãuga manualele de uz intern publicate în cadrul instituþiilor de învãþãmânt superior de specialitate sau al centrelor de pregãtire ºi perfecþionare a personalului din domeniul naval, dar toate acestea surprind, de obicei, doar câte un aspect specific. Nu vom încheia aceastã sumarã ºi desigur incompletã trecere în revistã a literaturii tehnice dedicate motoarelor navale, fãrã a menþiona seria monograficã aflatã încã în derulare, intitulatã Motoare navale, din care au apãrut, pânã în momentul de faþã, primele trei volume: Vol. I - Procese ºi caracteristici, Vol II - Supraalimentare Dinamicã, ambele în Editura Didacticã ºi Pedagogicã, în 1996, respectiv 1998 ºi Vol. III — Concepte moderne de calcul ºi construcþie, Editura Bren, 2001; aceastã serie, având ca autor principal ºi coordonator pe primul autor al lucrãrii de faþã, a încercat ºi a izbutit, conform semnalelor primite de la specialiºti din þarã ºi strãinãtate, sã suplineascã carenþele ºtiinþifice, fãrã ca aspectele concrete, de utilizare a tipului de motoare de care ne ocupãm, sã fie eludate. Cu toate acestea, s-a considerat necesarã elaborarea volumului de faþã, care îºi propune sã fie un manual de motoare diesel navale, lucrare care sã cuprindã aspectele esenþiale, acelea legate de procesele termice din motor, de dinamicã, de construcþie ºi calcul, ca ºi pe acela de exploatare, întreþinere ºi reparare a motoarelor navale. Un astfel de manual, conceput, de fapt ca o culegere de note de curs universitar, considerãm cã poate fi un instrument mai eficient, mai concentrat ºi axat pe problemele directe pe care le ridicã cunoaºterea detaliatã a motorului naval, lucrarea fiind adresatã, în principal, studenþilor cu profil mecanic naval. S-a încercat, în acest fel, sã se respecte o structurã logicã în expunerea didacticã, specificã cerinþelor universitare unanim recunoscute în domeniul motoarelor cu ardere internã. Numãrul de cursuri dedicate

4
capitolelor constituente este în perfectã concordanþã cu volumul de cunoºtinþe aferente standardelor internaþionale (Standards of Training, Certification and Watchkeeping for Seafarers STCW), impuse de IMO (International Maritime Organization). Îndeplinirea ambelor categorii de criterii a fost posibilã dupã analize îndelungate ale acestora, iar acordarea lor s-a concretizat în elaborarea unor programe analitice moderne, care stau la baza cursurilor de specialitate desfãºurate în Universitatea Maritimã din Constanþa, informaþiile prezentate în lucrare fiind doar suportul cursurilor de specialitate predate în aceastã instituþie de învãþãmânt superior. Astfel conceput, volumul de faþã se constituie ca un îndrumar practic uºor de consultat ºi pentru aspiranþii la gradele de ofiþer mecanic maritim, conþinutul modern, actual, fiind în bunã concordanþã ºi cu nivelul de cunoºtinþe solicitat de organisme internaþionale (de exemplu Coast Guard, etc.). Informaþiile tehnice ºi ºtiinþifice sunt prezentate gradat, de la particular la general, de la simplu la complex, de la teoretic la practic, iar caracterul uneori uºor redundant, ca ºi aplicaþiile sau soluþiile tehnice concrete prezentate la sfârºitul unor capitole în scopul fixãrii cunoºtinþelor, fac lucrarea accesibilã ºi îi conferã un caracter inedit, dorindu-se, aºa cum s-a menþionat deja, un ansamblu cvasiexhaustiv de informaþii în domeniul motoarelor diesel navale, structurat sub formã didacticã; menþionãm, în acest sens, codificarea ºi indexarea cunoºtinþelor prezentate. Noþiunile de bazã prezentate în aceste cursuri sunt amplificate ºi concretizate prin teme de casã ºi aplicaþii practice concrete efectuate în laboratoare de specialitate ºi la bordul navelor comerciale, aºa cum reiese din fiºa disciplinei, pe care autorii, þinând cont de scopul declarat al lucrãrii, au considerat interesant de a fi prezentatã. Disciplina:
Construcþia ºi calculul motoarelor navale ºi a sistemelor auxiliare Cod (Plan de învãþãmânt) EM 4.3.7; EM 4.3.8 nr. puncte credit 7+7=14 Profesori titulari: Prof.univ.dr.ing. Nicolae BUZBUCHI
ª.l.drd.ing. Liviu Constantin STAN
Fond de timp:4 ore de curs / 2 ore laborator / sãptãmânã / finalizat cu 2 examene Obiective: Cunoaºterea comportamentului dinamic al motorului naval, cunoaºterea constructivã a motorului,
solicitãrilor acestuia ºi funcþionãrii sistemelor auxiliare ale motoarelor navale Conþinut: Introduce noþiunile de bazã în domeniul dinamicii ºi echilibrãrii motorului naval, echipamentului
mobil ºi fix al acestuia, soluþiile constructive ale componentelor motorului, solicitãrile ºi principiile de calcul de rezistenþã, sistemele auxiliare ale motoarelor navale ºi funcþionarea lor normalã
Cunoºtinþe anterioare: ªtiinþa ºi tehnologia materialelor, Mecanicã, Rezistenta materialelor, Organe de maºini, Mecanica fluidelor ºi maºini hidropneumatice, Procese, caracteristici ºi supraalimentarea motoarelor navale
Evaluarea cunoºtinþelor:
Activitãþi Procent acordat Prezenþa la curs
Tema de casã (proiect)
Activitate laborator
Verificãri pe parcursul semestrului (3)
Examen final
10%
10%
10%
30%
40%
Rod al experienþei didactice, tehnice ºi ºtiinþifice a autorilor, volumul de faþã poate constitui ºi un îndrumar pentru rezolvarea unor aplicaþii, proiecte, etc. necesare aprofundãrii studiului sau rezolvãrii unor probleme practice concrete, putând fi utilizat cu succes ºi de studenþii altor facultãþi, la care se predau discipline de motoare cu ardere internã, nu numai în aplicaþia navalã. Nu în ultimul rând, lucrarea poate fi consultatã de specialiºtii în domeniul motoarelor termice, prezentând, pe lângã fundamentele necesare, soluþii tehnice deosebit de moderne ºi de complexe. Volumul mare de informaþii vehiculat a putut conduce, uneori, la strecurarea unor eventuale erori, pentru semnalarea cãrora mulþumim anticipat cititorilor.
Autorii

5
CUPRINS
Pag. Curs
Prefaþã....................................................................................................................................................................... 3 1. Cinematica mecanismului motor………………………………………………………………………………………. 9 C1 1.1. Cinematica mecanismului bielã-manivelã normal…………………………………………………………………. 9 C1 1.1.1. Cinematica manivelei………………………………………………………………………………………….. 9 C1 1.1.2. Cinematica pistonului………………………………………………………………………………………….. 10 C1 1.1.2.1. Deplasarea pistonului………………………………………………………………………………... 10 C1 1.1.2.2. Viteza pistonului……………………………………………………………………………………… 14 C2 1.1.2.3. Acceleraþia pistonului………………………………………………………………………………… 14 C2 1.1.3. Cinematica bielei……………………………………………………………………………………………….. 16 C2 1.2. Cinematica mecanismului cu bielã principalã si biele secundare………………………………………………... 18 C3 1.3. Cinematica motoarelor cu pistoane opuse…………………………………………………………………………. 24 C4 1.3.1. Cinematica motorului cu pistoane opuse ºi doi arbori cotiþi……………………………………………….. 24 C4 1.3.2. Cinematica motorului cu pistoane opuse ºi un singur arbore cotit……………………………………….. 28 C4 2. Dinamica mecanismului motor…………………………………………………………………………………………. 30 C5 2.1. Forþa de presiune a gazelor………………………………………………………………………………………….. 30 C5 2.2. Forþa de inerþie a pistonului…………………………………………………………………………………………... 31 C5 2.3. Forþele de inerþie ale bielei…………………………………………………………………………………………… 32 C5 2.4. Forþa de inerþie a manivelei………………………………………………………………………………………….. 35 C6 2.5. Forþele totale de inerþie……………………………………………………………………………………………….. 35 C6 2.6. Forþele din mecanismul motor……………………………………………………………………………………….. 35 C6 2.7. Forþele din lagãre……………………………………………………………………………………………………… 40 C7 2.7.1. Forþele din lagãrul maneton…………………………………………………………………………………… 40 C7 2.7.2. Forþele din lagãrul palier………………………………………………………………………………………. 42 C7 2.8. Momentul motor……………………………………………………………………………………………………….. 45 C8 2.9. Uniformizarea miºcãrii de rotaþie a arborelui cotit…………………………………………………………………. 48 C8 2.9.1. Metoda aproximativã…………………………………………………………………………………………... 48 C8 2.9.2. Metoda exactã………………………………………………………………………………………………….. 50 C9 2.10. Ordinea de aprindere………………………………………………………………………………………………... 54 C10 2.10.1. Steaua manivelelor ºi ordinea de aprindere la motoarele în linie……………………………………… 54 C10 2.10.2. Steaua manivelelor ºi ordinea de aprindere la motoarele în V………………………………………… 56 C10 3. Echilibrarea motoarelor navale…………………………………………………………………………………………. 61 C11 3.1. Cauzele dezechilibrãrii motoarelor navale………………………………………………………………………….. 61 C11 3.2. Echilibrarea motorului monocilindric………………………………………………………………………………… 63 C11 3.2.1. Echilibrarea forþei de inerþie a maselor în miºcare de rotaþie……………………………………………… 63 C11 3.2.2. Echilibrarea forþelor de inerþie ale maselor în miºcare de translaþie……………………………………… 63 C11 3.2.3. Echilibrarea momentelor de rãsturnare (ruliu) ale forþelor de presiune a gazelor ºi de inerþie ale maselor în miºcare de translaþie……………………………………………………………………………… 66
C12
3.3. Echilibrarea motoarelor policilindrice în linie……………………………………………………………………….. 70 C13 3.3.1. Echilibrarea forþelor de inerþie ºi a momentelor de ruliu…………………………………………………… 70 C13 3.3.2. Echilibrarea momentelor forþelor de inerþie…………………………………………………………………. 75 C14 3.3.2.1. Echilibrarea momentelor forþelor de inerþie ale maselor în miºcare de rotaþie…………………. 75 C14 3.3.3.2. Echilibrarea momentelor forþelor de inerþie ale maselor în miºcare de translaþie……………... 76 C14 3.3.3. Analiza echilibrãrii unor motoare în linie…………………………………………………………………….. 79 C15
C16 C17
3.4. Echilibrarea motoarelor în V………………………………………………………………………………….………. 95 C17 3.5. Echilibrarea motoarelor cu pistoane opuse………………………………………………………………………… 96 C17 3.6. Particularitãþi ale echilibrãrii motoarelor navale……………………………………………………………………. 98 C18 4. Construcþia ºi calculul pistonului……………………………………………………………………………………… 105 C19 4.1. Rol funcþional…………………………………………………………………………………………………………... 105 C19 4.2. Materiale……………………………………………………………………………………………………………….. 105 C19 4.3. Tehnologie de fabricaþie……………………………………………………………………………………………… 105 C19 4.4. Soluþii constructive…………………………………………………………………………………………………….. 105 C19 4.5. Calculul pistonului……………………………………………………………………………………………………... 113 C20 4.5.1. Schema de calcul, dimensiuni caracteristice, solicitãri…………………………………………………….. 113 C20 4.5.2. Calculul capului pistonului…………………………………………………………………………………….. 113 C20 4.5.3. Calculul regiunii port-segmenþi……………………………………………………………………………….. 114 C20 4.5.4. Calculul mantalei pistonului…………………………………………………………………………………… 114 C20 4.5.5. Încãrcarea termicã a capului pistonului……………………………………………………………………… 117 C20 5. Construcþia ºi calculul bolþului…………………………………………………………………………………………. 119 C21 5.1. Rol funcþional…………………………………………………………………………………………………………... 119 C21 5.2. Materiale……………………………………………………………………………………………………………….. 119 C21 5.3. Tehnologie de fabricaþie, soluþii constructive ºi de montaj………………………………………………………… 119 C21 5.4. Calculul bolþului………………………………………………………………………………………………………... 120 C21

6
5.4.1. Schema de calcul, dimensiuni caracteristice, solicitãri…………………………………………………….. 120 C21 5.4.2. Calculul de verificare la presiune de contact în umerii pistonului ºi în piciorul bielei…………………… 120 C21 5.4.3. Calculul de verificare la încovoiere…………………………………………………………………………... 120 C21 5.4.4. Calculul de verificare la obosealã……………………………………………………………………………. 121 C21 5.4.5. Calculul de verificare la forfecare…………………………………………………………………………….. 121 C21 5.4.6. Calculul de verificare la ovalizare…………………………………………………………………………….. 122 C21 5.4.7. Determinarea jocului la montaj……………………………………………………………………………….. 123 C21 5.4.8. Temperatura minimã a pistonului pentru montarea bolþului flotant……………………………………….. 123 C21 6. Construcþia ºi calculul segmenþilor……………………………………………………………………………………. 124 C22 6.1. Rol funcþional…………………………………………………………………………………………………………... 124 C22 6.2. Materiale………………………………………………………………….…………………………………………….. 125 C22 6.3. Tehnologie de fabricaþie………………………………………………………………………………………………. 125 C22 6.4. Soluþii constructive…………………………………………………………………………………………………….. 125 C22 6.5. Calculul segmenþilor…………………………………………………………………………………………………... 127 C22 6.5.1. Solicitãri…………………………………………………………………………………………………………. 127 C22 6.5.2. Determinarea distribuþiei de presiuni radiale………………………………………………………………... 128 C22 6.5.3. Determinarea formei libere a segmentului…………………………………………………………………... 129 C23 6.5.4. Determinarea grosimii radiale a segmentului……………………………………………………………….. 130 C23 6.5.5. Verificarea segmentului la montaj……………………………………………………………………………. 131 C23 6.5.6. Verificarea segmentului la dilatare…………………………………………………………………………… 131 C23 7. Construcþia ºi calculul tijei pistonului………………………………………………………………………………… 132 C24 7.1. Rol funcþional…………………………………………………………………………………………………………... 132 C24 7.2. Materiale, tehnologie de fabricaþie…………………………………………………………………………………... 132 C24 7.3. Soluþii constructive…………………………………………………………………………………………………….. 132 C24 7.4. Calcului tijei pistonului………………………………………………………………………………………………… 133 C24 7.4.1. Schema de calcul, dimensiuni caracteristice, solicitãri…………………………………………………….. 133 C24 7.4.2. Verificarea la flambaj………………………………………………………………………………………….. 133 C24 7.4.3. Verificarea tijei pistonului la strivire………………………………………………………………………….. 134 C24 7.4.4. Verificarea la întindere a porþiunii filetate a tijei pistonului………………………………………………… 135 C24 8. Construcþia ºi calculul capului de cruce……………………………………………………………………………… 135 C24 8.1. Rol funcþional…………………………………………………………………………………………………………... 135 C24 8.2. Materiale, tehnologie de fabricaþie…………………………………………………………………………………... 135 C24 8.3. Soluþii constructive…………………………………………………………………………………………………….. 135 C24 8.4. Calculul capului de cruce……………………………………………………………………………………………... 135 C24 8.4.1. Schema de calcul, solicitãri…………………………………………………………………………………… 135 C24 8.4.2. Verificarea bolþului capului de cruce la încovoiere…………………………………………………………. 136 C24 8.4.3. Verificarea bolþului capului de cruce la presiunea de contact în piciorul bielei………………………….. 136 C24 8.4.4. Verificarea patinei la strivire pe glisierã……………………………………………………………………… 136 C24 9. Construcþia ºi calculul bielei……………………………………………………………………………………………. 137 C25 9.1. Rol funcþional…………………………………………………………………………………………………………... 137 C25 9.2. Materiale………………………………………………………………………………………………………………... 137 C25 9.3. Tehnologie de fabricaþie………………………………………………………………………………………………. 137 C25 9.4. Soluþii constructive…………………………………………………………………………………………………….. 137 C25 9.5. Calculul bielei………………………………………………………………………………………………………….. 145 C26 9.5.1. Calculul piciorului bielei……………………………………………………………………………………….. 145 C26 9.5.1.1. Calculul la întindere………………………………………………………………………………….. 145 C26 9.5.1.2. Calculul la comprimare………………………………………………………………………………. 147 C26 9.5.1.3. Calculul la fretaj………………………………………………………………………………………. 148 C26 9.5.1.4. Verificarea la obosealã………………………………………………………………………………. 148 C26 9.5.1.5. Verificarea la deformaþie a piciorului bielei………………………………………………………… 149 C26 9.5.2. Calculul corpului bielei………………………………………………………………………………………… 150 C27 9.5.2.1. Calculul la întindere………………………………………………………………………………….. 150 C27 9.5.2.2. Calculul la comprimare………………………………………………………………………………. 150 C27 9.5.2.3. Calculul la flambaj……………………………………………………………………………………. 150 C27 9.5.2.4. Calculul de verificare la obosealã…………………………………………………………………... 151 C27 9.5.3. Calculul capului bielei………………………………………………………………………………………….. 151 C27 9.5.3.1. Calculul la întindere………………………………………………………………………………….. 151 C27 9.5.3.2. Calculul la obosealã al capului bielei………………………………………………………………. 153 C27 9.5.3.3. Calculul de verificare la deformaþie………………………………………………………………… 153 C27 9.5.4. Calculul ºuruburilor de bielã………………………………………………………………………………….. 153 C27 9.5.4.1. Calculul la întindere al ºuruburilor bielei…………………………………………………………… 153 C27 9.5.4.2. Dimensionarea ºuruburilor bielei…………………………………………………………………… 154 C27 9.5.4.3. Verificarea ºuruburilor bielei la obosealã………………………………………………………….. 155 C27 10. Construcþia ºi calculul arborelui cotit……………………………………………………………………………….. 156 C28 10.1. Rol funcþional……………………………………………………………………………………………………….. 156 C28 10.2. Materiale ºi tehnologie de fabricaþie……………………………………………………………………………… 156 C28 10.3. Solicitãri……………………………………………………………………………………………………………… 156 C28 10.4. Soluþii constructive…………………………………………………………………………………………………. 160 C28 10.5. Calculul arborelui cotit……………………………………………………………………………………………… 167 C29 10.5.1. Calculul de verificare la presiune ºi încãlzire…………………………………………………………… 167 C29 10.5.1.1. Diagrama de uzurã a fusului maneton……………………………………………………….. 167 C29 10.5.1.2. Verificarea fusurilor la presiune……………………………………………………………….. 168 C29 10.5.1.3. Verificarea la încãlzire…………………………………………………………………………. 168 C29 10.5.2. Calculul de verificare la obosealã……………………………………………………………………….. 168 C29 10.5.2.1. Calculul fusului palier…………………………………………………………………………… 169 C29 10.5.2.2. Calculul fusului maneton……………………………………………………………………….. 170 C29
7
10.5.2.3. Calculul braþului…………………………………………………………………………………. 171 C29 10.5.3. Calculul de verificare la vibraþii torsionale………………………………………………………………. 173 C30 10.5.3.1. Determinarea sistemului oscilant echivalent………………………………………………… 173 C30 10.5.3.2. Determinarea pulsaþiilor proprii ale liniilor de arbori………………………………………… 177 C31
10.5.3.2.1. Determinarea pulsaþiilor proprii ale liniilor de arbori cuplaþi direct cu motorul. 177 C31 10.5.3.2.2. Determinarea pulsaþiilor proprii ale liniilor de arbori cuplaþi prin transmisie mecanicã cu motorul……………………………………………………………… 183
C32
10.5.3.3. Vibraþiile torsionale forþate ale liniilor de arbori……………………………………………… 188 C33 10.5.3.3.1. Sursele de excitaþie a vibraþiilor torsionale……………………………..………. 188 C33
10.5.3.3.2. Rezonanþa sistemelor oscilante…………………………………………………. 188 C33 10.5.3.3.3. Determinarea gradelor de excitaþie a sistemelor oscilante…………………… 191 C34 10.5.3.3.4. Determinarea amplitudinii vibraþiilor forþate…………………………………….. 192 C34 10.5.3.3.4.1. Determinarea amplitudinii vibraþiilor forþate neamortizate……… 192 C34 10.5.3.3.4.2. Determinarea amplitudinii vibraþiilor forþate amortizate………… 197 C35 10.5.3.4. Determinarea regimurilor de rezonanþã……………………………………………………… 198 C35 10.5.3.5. Recomandãri ale RNR referitoare la vibraþiile torsionale ale liniilor de arbori antrenaþi de motoarele navale……………………………………………………………………………. 199
C35
10.5.3.5.1. Indicaþii generale…………………………………………………………………… 200 C35 10.5.3.5.2. Tensiuni admisibile………………………………………………………………… 201 C35 10.5.3.5.3. Mãsurarea tensiunilor produse de vibraþiile torsionale………………………… 202 C35 10.5.3.5.4. Zone de turaþii interzise…………………………………………………………… 202 C35 11. Construcþia ºi calculul organelor fixe ale motorului naval………………………………………………………. 203 C36 11.1. Chiulasa…………………………………………………………………………………………………………… 203 C36 11.1.1. Rol funcþional………………………………………………………………………………………………. 203 C36 11.1.2. Materiale, tehnologie de fabricaþie………………………………………………………………………. 203 C36 11.1.3. Soluþii constructive………………………………………………………………………………………… 204 C36 11.1.4.Calculul chiulasei…………………………………………………………………………………………… 208 C36 11.1.4.1. Solicitãri, schemã ºi ipoteze de calcul………………………………………………………… 208 C36 11.1.4.2. Calculul la încovoiere…………………………………………………………………………… 208 C36 11.1.4.3.Calculul solicitãrilor termice…………………………………………………………………….. 209 C36 11.1.4.4. Dimensionarea prezoanelor chiulasei………………………………………………………… 210 C36 11.1.4.5. Calculul presiunii de probã hidraulicã………………………………………………………… 210 C36 11.2. Blocul cilindrilor…………………………………………………………………………………………………….. 212 C37 11.2.1. Rol funcþional………………………………………………………………………………………………. 213 C37 11.2.2. Materiale, tehnologie de fabricaþie………………………………………………………………………. 213 C37 11.2.3. Soluþii constructive………………………………………………………………………………………… 213 C37 11.2.4. Calculul cãmãºii de cilindru……………………………………………………………………………… 218 C37 11.2.4.1. Calculul de verificare al gulerului cãmãºii…………………………………………………….. 218 C37 11.2.4.2. Calculul de verificare la încovoiere……………………………………………………………. 219 C37 11.2.4.3. Calculul tensiunii datorate presiunii gazelor………………………………………………….. 220 C38 11.2.4.4. Calculul tensiunilor termice…………………………………………………………………….. 221 C38 11.2.4.5. Verificarea tensiunii rezultante………………………………………………………………… 221 C38 11.3. Blocul coloanelor…………………………………………………………………………………………………… 221 C38 11.3.1. Rol funcþional………………………………………………………………………………………………. 221 C38 11.3.2. Materiale, tehnologie de fabricaþie………………………………………………………………………. 222 C38 11.3.3. Soluþii constructive………………………………………………………………………………………… 222 C38 11.3.4. Calculul blocului coloanelor………………………………………………………………………………. 224 C38 11.3.4.1. Calculul la comprimare…………………………………………………………………………. 224 C38 11.3.4.2. Calculul la încovoiere…………………………………………………………………………… 225 C38 11.3.4.3. Verificarea la tensiunea rezultantã……………………………………………………………. 225 C38 11.4. Rama de fundaþie………………………………………………………………………………………………..…. 226 C39 11.4.1. Rol funcþional, materiale, tehnologie de fabricaþie…………………………………………………….. 226 C39 11.4.2. Soluþii constructive………………………………………………………………………………………… 226 C39 11.4.3. Calculul ramei de fundaþie………………………………………………………………………………... 227 C39 11.5. Tiranþii……………………………………………………………………………………………………………….. 228 C39 11.5.1. Rol funcþional, soluþii constructive, materiale, tehnologie de fabricaþie……………………………… 228 C39 11.5.2. Calculul tirantului………………………………………………………………………………..………… 228 C39 12. Sistemul de alimentare cu combustibil a motoarelor navale……………………………………………………. 231 C40 12.1. Rol ºi scheme funcþionale…………………………………………………………………………………………. 231 C40 12.1.1. Subsistemul de separare…………………………………………………………………………………. 231 C40 12.1.2. Subsistemul de alimentare (de joasã presiune)……………………………………………………….. 234 C40 12.1.3. Subsistemul de injecþie (de înaltã presiune)……………………………………………………………. 238 C41 12.1.4. Structura sistemului de alimentare………………………………………………………………………. 242 C42 12.2. Calculul sistemului se alimentare cu combustibil……………………………………………………………….. 252 C43 12.2.1. Calculul volumelor tancurilor de combustibil……………………………………………………………. 252 C43 12.2.2. Stabilirea cantitãþii de combustibil necesare a fi ambarcate la bord…………………………………. 252 C43 12.2.3. Calculul de alegere a pompelor de combustibil………………………………………………………… 253 C43 12.2.4. Calculul de alegere a încãlzitoarelor de combustibil………………………………………………….. 253 C43 12.2.5. Calculul de alegere a separatoarelor de combustibil………………………………………………….. 254 C43 12.2.6. Alegerea filtrelor de combustibil………………………………………………………………………….. 254 C43 12.2.7. Calculul pompei de injecþie……………………………………………………………………………….. 254 C43 12.2.8. Calculul injectorului……………………………………………………………………………………….. 256 C43 13. Sistemul de ungere a motoarelor navale……………………………………………………………………………. 257 C44 13.1. Rol ºi scheme funcþionale…………………………………………………………………………………………. 257 C44 13.1.1. Sistemului de ungere al motoarelor principale…………………………………………………………. 257 C44 13.1.2. Subsistemul de separare…………………………………………………………………………………. 261 C44

8
13.1.3. Sistemul de ungere a motoarelor auxiliare……………………………………………………………… 261 C44 13.2. Structura sistemului de ungere……………………………………………………………………………………. 264 C45 13.3. Calculul instalaþiei de ungere……………………………………………………………………………………… 269 C45 13.3.1. Calculul debitului pompei de circulaþie ulei…………………………………………………………….. 269 C45 13.3.2. Calculul capacitãþilor tancurilor de ulei………………………………………………………………….. 269 C45 13.3.3. Calculul de alegere al separatoarelor de ulei………………………………………………………….. 270 C45 13.3.4. Alegerea filtrelor de ulei…………………………………………………………………………………… 270 C45 13.3.5. Calculul de alegere al rãcitoarelor de ulei………………………………………………………………. 270 C45 14. Sistemul de rãcire a motoarelor navale……………………………………………………………………………… 271 C46 14.1. Rol ºi scheme funcþionale…………………………………………………………………………………………. 271 C46 14.1.1. Subsistemul de rãcire în circuit deschis………………………………………………………………… 271 C46 14.1.2. Subsistemul de rãcire în circuit închis…………………………………………………………………… 273 C46
C47 14.2. Structura sistemului de ungere……………………………………………………………………………………. 279 C48 14.3. Calculul sistemului de rãcire………………………………………………………………………………………. 283 C48 14.3.1. Calculul subsistemului de rãcire cilindri…………………………………………………………………. 283 C48 14.3.1.1. Calculul fluxului de cãldurã preluat de apa de rãcire din subsistem……………………… 283 C48 14.3.1.2. Calculul debitului masic al agentului de rãcire din subsistem……………………………... 283 C48 14.3.1.3. Calculul debitului pompei de circulaþie a apei de rãcire cilindri……………………………. 283 C48 14.3.1.4. Calculul diametrului tubulaturii din subsistem……………………………………………….. 283 C48 14.3.1.5. Calculul suprafeþei de schimb de cãldurã a rãcitorului de apã rãcire cilindri…………….. 283 C48 14.3.1.6. Calculul volumului tancului de compensã din subsistemul de rãcire cilindri……………... 284 C48 14.3.2. Calculul subsistemului de rãcire pistoane………………………………………………………………. 284 C48 14.3.3. Calculul subsistemului de rãcire injectoare…………………………………………………………….. 284 C48 15. Sistemul de distribuþie a gazelor……………………………………………………………………………………… 285 C49 15.1. Rol ºi variante constructive……………………………………………………………………………………….. 285 C49 15.1.1. Sistemul de distribuþie la motoarele în patru timpi…………………………………………………….. 285 C49 15.1.2. Sistemul de distribuþie la motoarele în doi timpi……………………………………………………….. 289 C49 15.1.3. Structura sistemului de distribuþie a gazelor……………………………………………………………. 293 C50 15.2. Calculul sistemului de distribuþie a gazelor……………………………………………………………………… 302 C51 15.2.1. Calculul sistemului de distribuþie a gazelor la motoarele în patru timpi……………………………… 302 C51 15.2.1.1. Calculul supapei………………………………………………………………………………… 302 C51 15.2.1.1.1. Calculul diametrului galeriei……………………………………………………… 302 C51 15.2.1.1.2. Calculul înãlþimii de ridicare a supapei…………………………………………. 302 C51 15.2.1.2. Calculul tachetului……………………………………………………………………………… 303 C51 15.2.1.2.1. Profilul camei………………………………………………………………………. 303 C51 15.2.1.2.2. Determinarea înãlþimii de ridicare a tachetului pe camã……………………… 304 C51 15.2.1.3. Calculul arcului de supapã…………………………………………………………………….. 306 C51 15.2.1.3.1. Calculul maselor reduse ale mecanismului de acþionare…………………….. 306 C51 15.2.1.3.2. Forþele de inerþie din mecanismul de acþionare a supapei…………………… 306 C51 15.2.1.3.3. Verificarea arcului la torsiune……………………………………………………. 307 C51 15.2.1.3.4. Determinarea numãrului de spire active ale arcului…………………………… 308 C51 15.2.1.3.5. Verificarea arcului la vibraþii……………………………………………………… 308 C51 15.2.1.4. Calculul culbutorului ºi al tijei împingãtoare…………………………………………………. 309 C51 15.2.1.5. Calculul arborelui de distribuþie……………………………………………………………….. 310 C51 15.2.1.5.1. Calculul de verificare la încovoiere ºi torsiune………………………………… 310 C51 15.2.1.5.2. Dispunerea camelor pe arborele de distribuþie………………………………… 310 C51 15.2.2. Calculul sistemului de distribuþie a gazelor la motoarele în doi timpi………………………………… 311 C51 16. Sistemul de lansare a motoarelor navale…………………………………………………………………………… 313 C52 16.1. Rol ºi scheme funcþionale…………………………………………………………………………………………. 313 C52 16.2. Structura sistemului de lansare…………………………………………………………………………………… 314 C52 16.3. Calculul sistemului de lansare…………………………………………………………………………………….. 319 C53 16.3.1. Calculul puterii necesare pornirii…………………………………………………………………………. 319 C53 16.3.2. Calculul volumului buteliilor de lansare…………………………………………………………………. 319 C53 16.3.3. Verificarea grosimii peretelui buteliei……………………………………………………………………. 320 C53 16.3.4. Calculul arcului supapei de lansare……………………………………………………………………… 321 C53 16.3.5. Calculul debitului volumic al electrocompresorului…………………………………………………….. 321 C53 17. Sistemul de Inversare a sensului de rotaþie a motoarelor navale………………………………………………. 322 C54 17.1. Rol ºi scheme funcþionale…………………………………………………………………………………………. 322 C54 17.2. Structura sistemului de inversare………………………………………………………………………………… 325 C54 17.3. Sisteme de comandã ale motoarelor navale……………………………………………………………………. 326 C54 18. Prezentarea de ansamblu a unor motoare navale moderne…………………………………………………….. 329 C55 18.1. Motoare navale lente………………………………………………………………………………………………. 329 C55 18.1.1. Motorul Sulzer RTA……………………………………………………………………………………….. 329 C55 18.1.2. Motorul MAN B&W MC……………………………………………………………………………………. 330 C55 18.1.3. Motorul MAN B&W S26MCE…………………………………………………………………………….. 331 C55 18.1.4. Motorul B&W KEF…………………………………………………………………………………………. 332 C55 18.1.5. Motorul Sulzer RND……………………………………………………………………………………….. 332 C55 18.1.6. Motorul Doxford……………………………………………………………………………………………. 333 C55 18.2. Motoare navale semirapide ºi rapide…………………………………………………………………………….. 335 C56 18.2.1. Motorul MAN B&W L58/64……………………………………………………………………………….. 335 C56 18.2.2. Motorul Sulzer ZA40S…………………………………………………………………………………….. 336 C56 18.2.3. Motorul SEMT Pielstick PC2-6V…………………………………………………………………………. 338 C56 18.2.4. Motorul Wärtsilä Vasa R46……………………………………………………………………………….. 339 C56 Bibliografie................................................................................................................................................................ 341

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
9
1. Cinematica mecanismului motor Specific motoarelor cu ardere internã cu piston este transformarea miºcãrii de translaþie alternativã a pistonului în miºcare de rotaþie a arborelui cotit, prin intermediul mecanismului bielã-manivelã. Mecanismul bielã-manivelã poate fi mecanism normal, care la rândul sãu poate fi normal axat (fig. 1,a), atunci când axa cilindrului este concurentã cu axa de rotaþie a arborelui cotit, sau normal dezaxat (fig. 1,b), atunci când axa cilindrului nu intersecteazã axa de rotaþie a arborelui cotit; acest tip de mecanism poate fi realizat in varianta cu piston portant (fig. 1), sau cu cap de cruce, ambele variante fiind identice din punct de vedere cinematic, miºcarea capului de cruce fiind identicã cu a pistonului; mecanism cu bielã principalã ºi biele secundare (fig. 2: 1-manivelã; 2-bielã principalã; 3-bielete), care la rândul sau poate fi axat sau dezaxat. Mecanismele normale caracterizeazã motoarele cu cilindri in linie, în timp ce mecanismele cu bielã principalã ºi biele secundare pot caracteriza uneori motoarele în V ºi, în special, motoarele în W ºi stea (fig. 3). Necesitatea studiului cinematic al mecanismului motor, studiu constând din precizarea funcþiilor care exprimã deplasarea, viteza ºi acceleraþia reperelor componente ale mecanismului, este impusã de cunoaºterea forþelor, implicit a solicitãrilor acestor componente.
1.1. Cinematica mecanismului bielã-manivelã normal
Mecanismul normal este prezentat în fig. 4. Elementele sale componente sunt: manivela de lungime R, care executã o miºcare de rotaþie cu viteza unghiulara ω ; biela de lungime L, articulatã cu manivela; biela executã o miºcare plan-paralelã; pistonul articulat de bielã prin intermediul unui bolþ (sau al unui cap de cruce), care executã o miºcare de translaþie alternativã în lungul axei cilindrului. În fig. 4 s-a prezentat mecanismul normal în cazul general, dezaxat; dezaxarea s-a notat cu E, aceasta putând fi directã sau inversã, dupã cum axa cilindrului este dezaxatã faþã de axa de rotaþie a arborelui cotit în sensul de rotaþie al acestuia sau contrar. Rapoartele:
LR
=λ (1)
ºi
REe = (2)
se numesc, respectiv, alungirea bielei (coeficient de compactitate al mecanismului) ºi dezaxarea (excentricitatea) relativã a mecanismului. Ambii coeficienþi definesc particularitãþile cinematice ale unui mecanism. Cinematica mecanismului se studiazã în ipoteza funcþionãrii motorului în regim stabilizat ºi a constanþei vitezei unghiulare a arborelui cotit.
1.1.1. Cinematica manivelei Pe baza ipotezei menþionate anterior, se poate deduce cã cinematica manivelei este independentã de particularitãþile geometrice ale mecanismului, precizate prin relaþiile (1) ºi (2). Poziþia manivelei este datã de unghiul pe care îl face axa manivelei
Fig. 2
Fig. 1
Fig. 3
C 1C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 10
cu paralela la axa cilindrului, care intersecteazã axa arborelui cotit, poziþie precizatã prin relaþia:
tω=α , (3)
în care t [s] reprezintã timpul iar 30/nπ=ω [rad/s] viteza unghiularã a arborelui cotit, n [rot/min] fiind turaþia acestuia. Deoarece s-a fãcut ipoteza:
.constdtd
=α
=ω , (4)
rezultã cã acceleraþia manivelei se compune numai din acceleraþia normalã (centripetã) an, datã de relaþia:
]/[ 22 smRan ω−= . (5)
1.1.2. Cinematica pistonului 1.1.2.1. Deplasarea pistonului
Deplasarea pistonului este identicã cu deplasarea piciorului bielei sau a punctului P, între punctul mort interior p.m.i. ºi punctul mort exterior p.m.e. Conform fig. 4, introducând notaþiile: S-cursa pistonului; yp-deplasarea momentanã a pistonului faþã de p.m.i.; P-centrul de articulaþie dintre bielã ºi piston; M-centrul de articulaþie dintre bielã ºi maneton; O-centrul de rotaþie al arborelui cotit; β -unghiul dintre bielã ºi axa cilindrului (oblicitatea bielei); Pi, Pe poziþiile extreme ale pistonului la punctele moarte, putem scrie expresia deplasãrii pistonului:
( ) ( )β+α−−+=
=−−=−=
coscos22
121
211
LRELR
POOOOPPOPOy iip, (6)
de unde:
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⎟⎠⎞
⎜⎝⎛ β
λ+α−−⎟
⎠⎞
⎜⎝⎛
λ+= cos1cos11 2
2
eRy p . (7)
Proiectând conturul OMP pe normala la axa cilindrului, se obþine, pentru cele douã cazuri de dezaxare:
ELR ±β=α sinsin , (8) semnul + corespunzând dezaxãrii directe, iar - celei inverse. Din relaþia (8) se deduce:
( )eeLR
RE
mmm αλ=λαλ=⋅αλ=β sinsinsinsin ,
deci:
( )22 sin1cos emαλ−=β . (9) Relaþia (7) reprezintã expresia exactã a deplasãrii momentane a pistonului. Dat fiind caracterul alternativ al acestei miºcãri, este avantajos ca funcþiile care descriu deplasarea, viteza ºi acceleraþia pistonului sã fie exprimate sub forma unor serii trigonometrice. Vom rescrie relaþia (7) sub forma:
( )
( ) ,sin11cos
11
22
22
⎭⎬⎫⎥⎦⎤
⎢⎣⎡ αλ−
λ+α−
⎪⎩
⎪⎨⎧
−−⎟⎠⎞
⎜⎝⎛
λ+=α=
e
eRyy pp
m
(10)
unde funcþia yp este periodicã de π2 , continuã ºi parã; în aceste condiþii yp se poate dezvolta în serie Fourier, sub forma:
( )⎥⎥⎦
⎤
⎢⎢⎣
⎡α+α+= ∑
∞
=10 sincos
kkkp kbkaaRy , (11)
în care coeficienþii a0, ak ºi bk sunt daþi de relaþiile:
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
ααλ−′−=αααπ
=
ααλ−=αααπ
=
ααλ−′−=ααπ
=
∫∫
∫∫
∫∫
ππ
ππ
ππ
0
2233
0
0
222
0
0
2211
00
)(sin1sin)(2
)(sin1cos)(2
)(sin1)(1
deccdkyR
b
decdkyR
a
deccdyR
a
pk
pk
p
m
m
m
(12)
Fig. 4
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56
O1

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
11
unde 3321 ,,,, ccccc ′′ sunt coeficienþi ce pot fi cu uºurinþã determinaþi. În schimb, integralele de mai sus, de tip eliptic, nefiind integrale eliptice complete, se dezvoltã mai dificil decât dacã am recurge la dezvoltarea expresiei (9) în serie de puteri. Aºadar, considerând o funcþie de tipul:
( ) ( )qxxf −= 1 , (13) o vom dezvolta în serie Taylor în jurul unui punct x0:
( ) ( ) ( ) ( )∑∞
=
⋅−
=−0
00
!1
k
kk
q xfkxx
x , (14)
unde derivata de ordinul k este datã de:
( ) ( ) ( ) ( ) ( )( ) kqkk xkqqqxf −−+−−−= 00 11...11 , (15) deci:
( ) ( ) ( ) ( ) ( ) ( ) .1!
1...111 00
0
kkqk
k
q xxxk
kqqqx −−
+−−−=− −
∞
=∑
(16) În (16) facem particularizãrile: x0=0, q∉N; prin analogie cu formula combinãrilor, vom introduce notaþia:
( ) ( )!
1...1~k
kqqqC k
q+−−
= ; (17)
evident, dacã q∈N, atunci kq
kq CC =
~, cu
semnificaþia cunoscutã din analiza combinatorie. Se obþine deci:
( ) ( ) kkq
k
k
q xCx ~110∑∞
=
−=− . (18)
În relaþia (18) se înlocuiesc: q=1/2,
( )22 sin ex ±αλ= ºi se obþine, þinând cont ºi de (9):
( ) ( ) kkkk
k
eC 222/1
0
sin~1cos λ⋅α−=β ∑∞
=
m . (19)
Dezvoltând acum ultimul factor dupã formula binomului lui Newton, rezultã:
( ) ( ) ( )∑ ∑∞
= =
− λ⎥⎥⎦
⎤
⎢⎢⎣
⎡α−=β
0
22
0
222/1 sin1~1cos
k
kk
j
jjkjk
jkk eCC m .
(20)
Cea de-a doua sumã conþine 2k+1 termeni, pe care îi vom separa în funcþie de paritate:
( )
⎟⎟
⎠
⎞⋅α⋅−
⎜⎜
⎝
⎛−⋅αλ−=β
∑
∑ ∑
=
−+−−
∞
= =
−
k
j
jjkjk
k
k
j
jjkjk
kkk
eC
eCC
1
12122122
0 0
22222
22/1
sin
sin~1cos
.
(21) Introducând formulele de dezvoltare cunoscute din trigonometrie:
( )
( ) ( )⎪⎪
⎩
⎪⎪
⎨
⎧
α−−=α
+α⋅−=α
∑
∑
=
−−
−−
−
=
+−
p
i
ipp
ip
p
p
i
ppp
ipp
ip
p
iC
CiC
112
122
12
122212
2
12sin12
1sin
212cos1
21sin
în (21) obþinem în continuare:
( )
( )
( ) ( ) .12sin12
1
212cos1
21~1cos
1
1
1122
1122
1
12122
1222222
1220 0
222
22/1
⎪⎭
⎪⎬⎫
⎥⎥⎦
⎤
⎢⎢⎣
⎡α−−⋅
⋅−⎥⎥⎦
⎤+α−⋅
⋅⎢⎣
⎡
⎪⎩
⎪⎨⎧
λ−=β
∑
∑∑
∑ ∑
+−
=
+−−+−
−+−
=
−−−
=
−−−
+−−
−−
∞
= =
jk
i
ijkjk
ijk
k
j
jjk
jk
i
jkjkjk
ijkjk
i
jkk
k
j
jjk
kkk
iC
eCCiC
eCC
(22) Cu aceasta, expresia (7) a deplasãrii instantanee a pistonului, pentru mecanismul normal, devine:
.)12sin()1(
21
21
2cos)1(2
1
~)1(cos11
121
1
1122
1
1122
1222222
1
122
2
0122
222
0
12
21
22
−+−
=
+−−+−
−
=+−
−−−−
−
=
+−−
=−−
∞
=
−
⎪⎭
⎪⎬⎫
⎪⎭
⎪⎬⎫
⎥⎥⎦
⎤α−−⋅
⋅⎢⎣
⎡−⎥⎦
⎤+
+α−⎪⎩
⎪⎨⎧
⎢⎣
⎡⋅
⎪⎩
⎪⎨⎧
⋅λ−−α−−⎟⎠⎞
⎜⎝⎛
λ+=
∑
∑
∑∑
∑
jjk
i
ijkjk
i
k
jjk
jk
jkjkjk
jk
i
jkjk
ik
jjk
jjk
k
kkkp
eiC
CC
iCeC
CeRy
(23) Vom analiza în continuare mecanismul normal axat, cel mai frecvent întâlnit la motoarele navale. Pentru aceasta, vom face particularizarea: e=0 (corespunzãtor E=0). Se obþine:
C 1C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 12
( )
( )
( )
( )
(
) .128358cos6cos84cos28
2cos56128
14321
3212
211
21
21
1656cos4cos62cos15
321
321
2211
21
21
834cos2cos4
81
21
121
21
212cos
21
21cos11
212cos1
21
~1cos11
7
5
3
122212
0
122/1
⎭⎬⎫
+⎥⎦⎤+α+α−α+
⎢⎣⎡ +α−λ
⋅⋅⋅
⎟⎠⎞
⎜⎝⎛ −⎟⎠⎞
⎜⎝⎛ −⎟⎠⎞
⎜⎝⎛ −
−
−⎥⎦⎤
⎢⎣⎡ +α−α+α−
⋅λ⋅⋅
⎟⎠⎞
⎜⎝⎛ −⎟⎠⎞
⎜⎝⎛ −
+⎥⎦⎤
⎢⎣⎡ +α+α−⋅
⋅λ⋅
⎟⎠⎞
⎜⎝⎛ −
−⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ +α−
λ+
λ−α−
λ+=
=⎥⎥⎦
⎤
⎢⎢⎣
⎡+α−⋅
⋅⎪⎩
⎪⎨⎧
λ−−α−λ
+=
∑
∑
=
+−
∞
=
−
K
R
CiC
CRy
k
i
kkk
ikk
ik
k
kkkp
(24) În final se obþine deplasarea pistonului ca o sumã de termeni armonici:
⎟⎟⎠
⎞⎜⎜⎝
⎛α+α+= ∑
∞
=1210 2coscos
kkp kaaaRy , (25)
unde:
⎪⎪⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪⎪⎪
⎨
⎧
+λ=
⎟⎠⎞
⎜⎝⎛ +λ+λ−=
+λ+λ+λ=
⎟⎠⎞
⎜⎝⎛ +λ+λ+λ+λ−=
−=
+λ+λ+λ+λ+=
KKKKKKKKKKKKK
K
K
K
K
K
78
756
7534
7532
1
7530
163845
20485
5121
409635
2563
641
204835
51215
161
41
116384
1752565
643
411
a
a
a
a
a
a
(26)
Se poate constata, analizând relaþia finalã (25) cã, pentru mecanismul motor normal axat, subzistã numai armonica de ordinul I ºi armonicile pare, de ordin 2k. Din punct de vedere practic, prezintã interes doar armonicile de ordinul I ºi II. Relaþia (25) devine:
( )α+α+= 2coscos 210 aaaRy p , (27)
în care, þinând cont de faptul cã 1<λ (λ variazã între limitele 5/13/1 ÷ ), implicã scãderea rapidã a amplitudinii armonicelor de ordin superior, putem lua pentru coeficienþi valorile:
λ−≅−=λ+≅41;1;
411 210 aaa ; (28)
se obþine relaþia aproximativã a deplasãrii pistonului:
( ) ( )⎥⎦⎤
⎢⎣⎡ α−
λ+α−= 2cos1
4cos1Ry p , (29)
care dã o eroare sub 1% faþã de expresia exactã. Deplasarea pistonului este deci o funcþie periodicã de perioadã egalã cu π2 . Deplasarea este nulã pentru 0=α ºi π=α 2 , deci în p.m.i. Evident, deplasarea ia valori extreme în punctele moarte; într-adevãr, aceastã valoare se obþine din:
( ) 02cos1sin2sin2
sin =αλ+α=⎟⎠⎞
⎜⎝⎛ α
λ+α=
αRR
ddy p ,
(30) de unde π=α k , k∈N. Cealaltã soluþie a ecuaþiei,
λ−=α /1cos este imposibilã, deoarece 1<λ , aºa cum s-a arãtat anterior. Valoarea maxima va fi:
( ) SRyy pp ==π= 2max . (31)
O altã valoare remarcabilã pentru yp este:
22λ
+=⎟⎠⎞
⎜⎝⎛ π RRy p . (32)
Fig. 5
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
13
Cu aceste observaþii, variaþia deplasãrii pistonului yp în funcþie de unghiul de rotaþie α al arborelui cotit pentru un mecanism normal axat este reprezentatã în figura 5. Observaþie: Din relaþia (29) se poate deduce cã deplasarea pistonului provine din însumarea armonicelor de ordinul I ºi II, date de relaþiile:
( )
( )⎪⎩
⎪⎨
⎧
α−⋅λ
=
α−=
2cos14
cos1
II
I
Ry
Ry
p
p
. (33)
care s-au reprezentat în figura 5 ºi individual. Din relaþia (29) ºi graficul de variaþie din figura 5, se constatã cã pentru o deplasare a manivelei
π=α , pistonul efectueazã o cursã completã; din (32) se observã însã cã, la o deplasare a manivelei
2/π=α , pistonul a executat mai mult de ½ din cursa RS 2= , datoritã lungimii finite a bielei; mãrimea 2/λR se numeºte corecþia Brix.
C 1C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 14
1.1.2.2. Viteza pistonului Viteza pistonului se obþine derivând relaþia exactã a deplasãrii pistonului în raport cu timpul:
αω=
α⋅
α==
ddy
dtd
ddy
dtdy
w pppp , (1)
unde s-a þinut cont de relaþia dintre unghiul de rotaþie al manivelei ºi viteza unghiularã a acesteia:
dtd /α=ω . Vom avea:
( ) .2sin2sin
2coscos
121
1210
⎥⎥⎦
⎤
⎢⎢⎣
⎡α⋅⋅+αω−=
=⎟⎟⎠
⎞⎜⎜⎝
⎛α+α+
αω=
αω=
∑
∑∞
=
∞
=
kk
kk
pp
kakaR
kaaaddR
ddy
w
(2) Cu eroarea menþionatã anterior, punând
11 −=a , 4/2 λ−=a ºi, oprindu-ne la primele douã armonici, obþinem:
⎟⎠⎞
⎜⎝⎛ α
λ+αω= 2sin
2sinRw p . (3)
Valorile lui α care anuleazã viteza pistonului sunt date de ecuaþia:
( ) 0cos1sin2sin2
sin =αλ+α=⎟⎠⎞
⎜⎝⎛ α
λ+α RR ; (4)
Viteza va atinge valori extreme pentru poziþia mecanismului pentru care:
( )
( )[ ] ,01cos2cos
2coscos
2 =−αλ+αω=
=αλ+αω=α
R
Rd
dw p
(5)
rezultând ecuaþia de gradul doi cu urmãtoarele soluþii reale:
λλ+±−
=α4
811arccos2
extrpw . (6)
Condiþia de compatibilitate a ecuaþiei (5) este:
14
811 2≤
λλ+±−
, (7)
care este satisfãcutã pentru orice valoare a lui
0>λ , ceea ce corespunde valorilor reale ale acestui parametru; în plus, valorile (6) corespund
cu suficientã precizie cu poziþia în care biela este perpendicularã pe manivelã. Þinând cont de paritatea funcþiilor trigonometrice ce intervin în expresia (6), putem preciza cele douã valori de extrem ale vitezei:
⎪⎩
⎪⎨
⎧
α−π=αλ
λ++−=α
12
1
24
811arccos2
extrpextrp
extrp
ww
w . (8)
În continuare, vom defini viteza medie a pistonului, care constituie criteriul de clasificare a motoarelor în funcþie de rapiditate, ca fiind raportul dintre cursa pistonului ºi intervalul de timp în care se realizeazã acesta:
]/[30
260
smSn
n
Sw p == , (9)
în care s-a þinut cont cã o cursã completã se efectueazã în 1/2 rotaþii, adicã într-un interval de 60/2n [s]; þinând cont de relaþia:
RS 2= , (10) ca ºi de faptul cã n=30ω / π [rot/min], se ajunge la:
pwR2π
=ω , (11)
care, introdusã în (3), în care se ia extrpwα=α , dã
valoarea raportului dintre extrpw ºi pw , dependentã
numai de valoarea lui λ :
⎟⎠⎞
⎜⎝⎛ α
λ+α
π=
extrpextrp
extrww
p
p
w
w2sin
2sin
2. (12)
Ca ºi pentru deplasarea pistonului, ºi pentru viteza acestuia putem face însumarea dintre cele douã armonici dominante, respectiv cele de ordinele I ºi II:
III2sin2
sin ppp wwRRw +=αλ
ω+αω= , (13)
ale cãror variaþii simultane, ca ºi însumarea, lor sunt date în figura 1.
1.1.2.3. Acceleraþia pistonului Prin derivarea în raport cu timpul a funcþiei care exprimã viteza pistonului (2), se poate deduce acceleraþia pistonului:
=α
ω=α
ω=α
α== 2
22
d
ydd
dwdtd
ddw
dtdw
a ppppp
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
15
( ) .2cos2cos
2coscos
12
21
2
12102
22
⎥⎥⎦
⎤
⎢⎢⎣
⎡α+αω−=
=⎟⎟⎠
⎞⎜⎜⎝
⎛α⋅+α+
α⋅ω=
∑
∑∞
=
∞
=
kk
kk
kakaR
kaaadd
(14)
Ca si in cazurile anterioare, ne vom limita la studiul armonicilor de ordinul I ºi II, luând în consideraþie primii coeficienþi armonici, cu care acceleraþia pistonului devine:
( )αλ+αω= 2coscos2Ra p . (15)
Acceleraþia este nulã pentru valori ale unghiului de manivelã pentru care viteza înregistreazã valori extreme, relaþia (8), ºi trece prin valori maxime pentru unghiuri date de ecuaþia:
( )
( ) .0cos41sin
2sin2sin
2
2
=αλ+αω−=
=αλ+αω−=α
R
Rd
da p
(16)
Soluþiile ultimei ecuaþii sunt: ,kπ=α ∈k N ºi
⎟⎠⎞
⎜⎝⎛
λ−
=α4
1arccos ; aceasta din urmã are valabilitate
numai pentru mecanismele pentru care 4/1>λ . Valorile extreme ale acceleraþiei vor fi deci:
( ) ( ) ( )λ+ω=π== 120 2Raaa pppmax, (17)
atinsã la p.m.i. ºi cea minimã:
( ) ( )λ−ω−=π= 12Raa ppmin, (18)
valoare atinsa la p.m.e.; în cazul existenþei soluþiei suplimentare, avem ºi valorile:
.81
116
1241
41arccos
min
2
22
p
pp
aR
Raaextr
<⎟⎠⎞
⎜⎝⎛
λ+λω−=
=⎥⎦
⎤⎢⎣
⎡⎟⎠
⎞⎜⎝
⎛ −λ
λ+⎟⎠⎞
⎜⎝⎛
λ−ω=⎥
⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛
λ−=
(19) valoarea
extrpa este valabilã doar pentru
mecanismele cu bielã scurtã (extrpa ); aceasta este
atinsã pentru douã puncte din vecinatatea p.m.e. Pentru motoarele navale, caracterizate prin mecanisme cu bielã lungã ( 4/1<λ ), nu obþinem aceste valori extreme suplimentare. Acceleraþia pistonului poate fi privitã ca suprapunerea a douã acceleraþii, de ordinul I ºi II:
III22 2coscos ppp aaRRa +=αω+αω= , (20)
iar variaþia graficã este datã în figura 2.
Fig. 1
Fig. 2
C 1C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56
Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 16
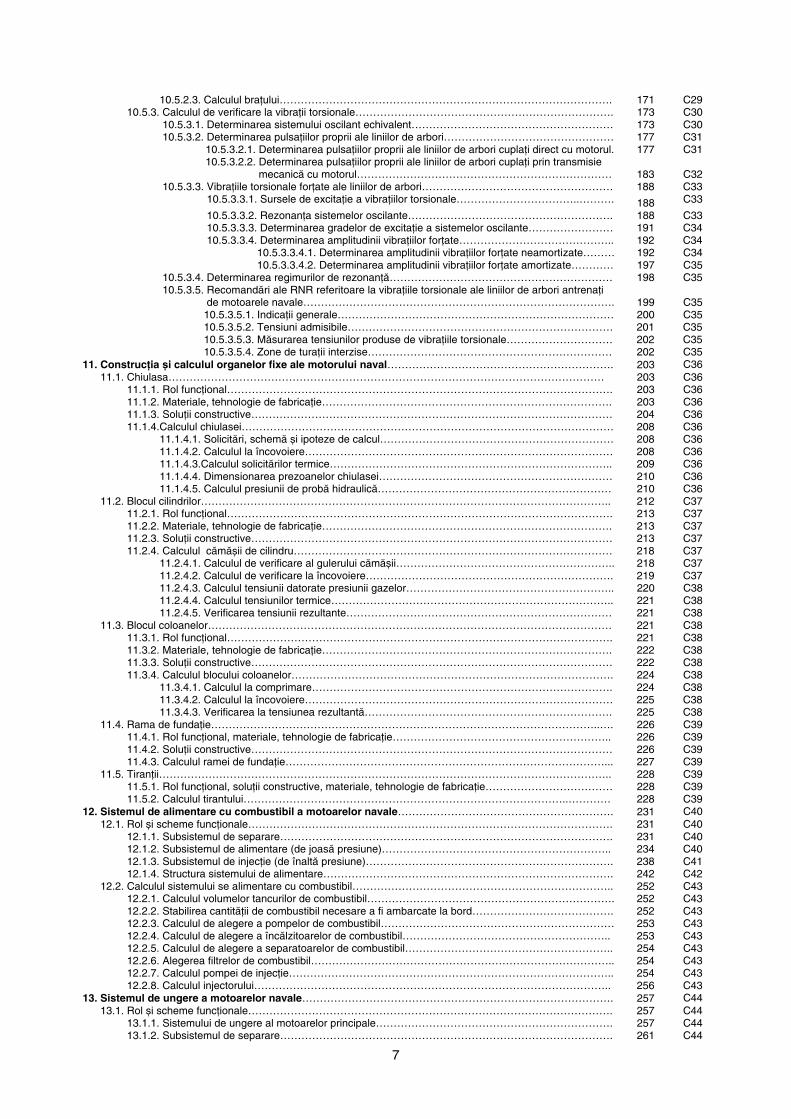
1.1.3. Cinematica bielei Miºcarea pe care o executã biela este de tip
plan-paralelã. Poziþia momentanã a bielei este complet determinatã de cota yp (deplasarea pistonului) ºi de β unghiul de oblicitate al bielei. În cele ce urmeazã, urmãrim determinarea vitezei unghiulare ºi acceleraþiei unghiulare instantanee ale bielei. Se reprezintã mecanismul normal axat în figura 3. Determinãm I centrul instantaneu de rotaþie (CIR) la intersecþia normalelor duse din M ºi P la suporturile vitezelor liniare ale celor douã puncte. Þinând cont de comportarea bielei faþã de centrul instantaneu de rotaþie (ca ºi cum s-ar roti în jurul axei instantanee de rotaþie, perpendiculara în I pe planul figurii), sensul real al vitezei unghiulare absolute în jurul lui I este redat în figura 3, iar mãrimea sa determinã pe baza proprietãþii miºcãrii plan-paralele: proiecþiile vitezelor a douã puncte ale unui corp solid rigid aflat într-o asemenea miºcare pe dreapta care uneºte aceste douã puncte sunt egale:
( )[ ]β+α−=β o90coscos mp ww , (21)
unde, cu notaþiile din figurã:
⎩⎨⎧
ω=
ω⋅=
Rw
IPw
m
bp . (22)
Din teorema sinusurilor aplicatã în triunghiul MIP, se obþine:
( ) ( )α−=β+α o90sinsin
LIP, (23)
de unde se scoate segmentul IP ; (22) ºi (23), introduse în (21) conduc la expresia:
αλ−
αλω=ω
22 sin1
cosb . (24)
Pentru mecanismul normal dezaxat, se va obþine:
( )22 sin1
cos
eb
±αλ−
αλω=ω , (25)
în care s-a þinut cont de valoarea excentricitãþii relative e . Viteza unghiularã a bielei se anuleazã pentru
0cos =α , adicã ( ) 2/12 π+=α k , k∈N, ºi înregistreazã valori extreme pentru poziþii ale mecanismului pentru care:
( )( ) ( )[ ]
( ).0
sin1
sin1sinsincos
sin1
cos
322
2222
22
=
⎟⎠⎞⎜
⎝⎛ ±αλ−
±αλ−α−±ααλ=
=⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
±αλ−
αα
λω=αω
e
ee
edd
dd b
(26)
Pentru mecanismul normal axat (e=0), soluþia ultimei ecuaþii este: 0sin =α , π=α k , k∈N; deci valorile extreme se realizeazã în punctele moarte, aceste valori fiind:
λω±=ωbextr . (27) În fine, acceleraþia unghiularã a bielei va fi derivata în raport cu timpul a vitezei unghiulare, deci:
( ) ( )[ ]( )
.sin1
sin1sinsincos3
22
22222
⎟⎠⎞⎜
⎝⎛ ±αλ−
±λ−α−±ααλλω=
=αω
ω=α
αω
=ω
=ε
e
eed
ddtd
dd
dtd bbb
b
(28)
Pentru e=0, acceleraþia devine:
( )3
22
22
sin1
sin1
⎟⎠⎞⎜
⎝⎛ αλ−
αωλ−λ−=εb . (30)
În acest caz, acceleraþia trece prin zero pentru
π=α k , k∈N, deci în punctele moarte, iar valorile extreme sunt atinse pentru dat de ecuaþia:
Fig. 3
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
17
( ) ( ) 0sin1
sin21cos15
22
2222 =
⎟⎠⎞⎜
⎝⎛ αλ−
αλ+αωλ−λ−=
αε
dd b
adicã: 0cos =α , ( ) 2/12 +=α k , deci:
2
2
1 λ−
λω±=ε
extrb . (31)
Observaþie: Viteza absolutã se poate determina ºi prin derivata relaþiei:
( )e±αλ=β sinsin în raport cu timpul, membru cu membru, în care se þine cont cã:
dtd
bβ
=ω .
În final se obþine o relaþie identicã cu (24).
C 1C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 18
1.2. Cinematica mecanismului cu bielã principalã ºi biele secundare
Mecanismul este specific motoarelor cu minim douã linii de cilindri ºi un singur arbore cotit, ca ºi motoarelor în stea. De asemenea, mecanismul cu bielã principalã ºi biele secundare poate fi folosit la motoarele în V, atunci când se apreciazã cã articularea alãturatã sau interferentã a bielelor pe acelaºi cot poate conduce la lungimi mari ale cotului ºi deci ale motorului. În cele ce urmeazã, vom analiza cinematica pistonului articulat cu biela secundarã, deoarece biela principalã face parte dintr-un mecanism de tip normal. Mecanismul cu bielã principalã ºi biele secundare este prezentat în figura 1. Principalele notaþii introduse sunt: γ -unghiul dintre axa cilindrului principal ºi cea a cilindrului secundar; 1γ -unghiul de calare a bielei secundare;
1α -unghiul de rotaþie al manivelei faþã de axa
cilindrului secundar; 1β -unghiul de oblicitate al bielei secundare; r-distanþa de la axa manetonului arborelui cotit pânã la axa bolþului bielei secundare; l-lungimea bielei secundare; 1py -deplasarea
pistonului articulat cu biela secundarã faþã de punctul mort interior (Pi1) de pe axa cilindrului secundar.
Aceastã din urmã mãrime se determinã din relaþia:
111 OPOPy ip −= . (1) Vom face urmãtoarele observaþii geometrice: • exprimãm valoarea unghiului exterior opus
unghiului PQM din triunghiul respectiv:
β+γ=ϕ+γ1 , (2) de unde: ( )γ−γ−β=ϕ 1 (3) ºi, introducând relaþia suplimentarã: γ−γ=ψ 1 , (4) în care, în general 0≠ψ , obþinem: ψ−β=ϕ ; (5)
• proiectãm segmentul OM ºi linia MNP1 pe direcþia normalã la axa cilindrului secundar; vom avea:
11 sinsinsin β+ϕ=α lrR (6)
ºi, introducând valoarea lui ϕ din (5) în (6), rezultã:
( )ψ−β−α=β sinsinsin 11 lr
lR
; (7)
• proiectãm OM ºi PM pe normala la axa
cilindrului principal: ( ) β=γ+α sinsin 1 LR , (8) adicã:
( )γ+αλ=β 1sinsin . (9) Relaþia (7) poate fi scrisã, succesiv, þinând cont de (9):
( )
( )
.cossin
coscossinsincoscos
cossincoscossin
coscossinsincossin
cossinsincossin
cossinsinsinsinsin
11
1
11
11
111
βψ+
+αψγ⋅λ−α⎟⎠⎞
⎜⎝⎛ ψγ⋅λ−=
=βψ+ψαγλ−
−ψγαλ−α=βψ+
+ψγ+αλ−α=βψ+
+ψβ−α=ψ−β−α=β
lr
lr
lr
lR
lr
lr
lr
lR
lr
lr
lR
lr
lr
lR
lr
lR
(10)
Introducem urmãtoarele mãrimi:
Fig. 1
C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
19
⎪⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪⎪
⎨
⎧
βψ⎟⎠⎞
⎜⎝⎛−=
⎟⎠⎞
⎜⎝⎛ ψγλ+⎟
⎠⎞
⎜⎝⎛ ψγλ−=
ψγλ−
ψγλ=θ
cossin
cossincoscos
coscos
cossinarctg
22
Alry
lr
lr
lRA
lr
lR
lr
(11)
Se poate observa cã, în timp ce mãrimile A (privitã ca o amplitudine relativã) ºi θ (consideratã ca un defazaj) sunt constante pentru un mecanism dat, depinzând numai de caracteristicile geometrice ale mecanismului, mãrimea y depinde, prin β , de
poziþia instantanee 1α a manivelei faþã de axa cilindrului secundar; se introduc relaþiile (11) în (10) obþinându-se:
( )[ ]yA −θ−α=β 11 sinsin . (12) Folosind dezvoltãri în serie de puteri ºi limitându-ne la primii doi termeni, vom obþine pentru mãrimea y precizatã la (11) urmãtoarea succesiune de valori, folosind ºi relaþia (9):
( )[ ]
( )
,sin
2sin2sin2cos2cos14
1sin
cos214
1sinsin211
sin1sincossin
11
2
1
22
2
ψ⋅
⋅⎥⎥⎦
⎤
⎢⎢⎣
⎡γα+γα−
λ−−=ψ⋅
⋅⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
γ+α−λ
−−ψ⎟⎠⎞
⎜⎝⎛ β−−=
=β−ψ⋅
−=βψ−=
Alr
Alr
Alr
lAr
Alry
deci dezvoltarea armonicã este:
.2sin2sinsin4
2cos2cossin4
sin4
1
12
12
2
αγψλ+
+αγψλ−ψ⎟⎟⎠
⎞⎜⎜⎝
⎛ λ−−=
Alr
Alr
Alry
(13) Intereseazã ºi dezvoltarea armonicã a expresiei:
( )
( )
( )[ ]=γ+α−λ−ψ=
=γ+αλ−ψ=
=β−ψ=βψ=
122
222
22
2
12
22
222
22
2
2222
222
22
22
2cos12
sin
sinsin
sin1sincossin
lAr
lAr
lAr
lAr
lAr
lAry
( ),2sin2sin2cos2cos12
sin
11
22
222
22
2
γα+γα−⋅
⋅λ−ψ=lA
rlA
r
deci:
.2sin2sin2
2cos2cos22
sin
122
22
122
22
22
222
22
22
αγλ−
−αγλ+λ−ψ=
lAr
lAr
lAr
lAry
(14) Pentru expresia:
( )( ) ( )
( ) ( )
( )[ ]
,cossinsin
sincossin2cos14
1cos
cossincossinsinsin2
1
cossinsinsin1
cossinsincoscoscos
1
11
2
1112
2
1122
αγψλ+
+αγψλ+⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
γ+α−λ
−ψ=
=αγ+γαψλ+⎥⎥⎦
⎤
⎢⎢⎣
⎡γ+α
λ−⋅
⋅ψ=ψγ+αλ+γ+αλ−⋅
⋅ψ=ψβ+ψβ=ψ−β
se obþine:
( )
.2sincos2sin4
2cos2coscos4
sincossin
cossinsincos4
1cos
1
2
1
2
1
1
2
αψγλ
−
−αγψλ
++αγψλ+
+αγψλ+ψ⎟⎟⎠
⎞⎜⎜⎝
⎛ λ−=ψ−β
(15)
Vom face particularizãri pentru: • piston secundar la punct mort interior; se fac
particularizãrile: 0β=β ºi 01 =α (cu o precizie acceptabilã); obþinem:
( )
;cos2cos
4sinsincos
41cos
22
0
ψγ⋅
⋅λ
+γψλ+ψ⎟⎟⎠
⎞⎜⎜⎝
⎛ λ−=ψ−β
(16)
• piston secundar la punct mort exterior; se fac urmãtoarele particularizãri: 0β′=β ºi π=α1 , deci:
( )
.cos2cos4
sinsincos4
1cos
2
2
0
ψγλ
+
+γψλ−ψ⎟⎟⎠
⎞⎜⎜⎝
⎛ λ−=ψ−β′
(17)
C 1C
C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 20
Situaþiile anterioare se completeazã ºi cu determinarea unghiurilor 10β ºi 10β′ , ale bielei secundare în poziþiile menþionate, þinând cont de relaþiile (7) ºi (9) pentru 01 =α , respectiv π=α1 :
( ) ( )[ ]
( )
( )
( )
,sin2
12sinsin
22cossin
22cos
4
41sin12sinsin
42cos
sin2144
12sincossin2
42cossin21
441
2sin2sin2cos2cos14
1
2cos14
1sin2
1
sin211sin1cos
22
2
22
2
22
2
2
2
222
2
2
222
2
2
2
00
2
2
02
2
2
2
2
002
2
02
2
102
2
2
102
102
10
⎟⎟⎠
⎞⎜⎜⎝
⎛γ
λ−ψγ+
+λ+ψγλ−ψ+
+−=γλ−ψγλ+ψ⋅
⋅γλ−+−=ψββ⋅
⋅+ψβ−+−=
=ψβ−ψβ−−=
=ψ−β−−=ψ−β−=
=β−≈β−=β
lr
lr
lr
lr
lr
lr
lr
lr
lr
lrl
rl
rl
r
deci:
ψγλ−ψγλ+
+ψγλ−ψ−=β
2sinsin4
2sinsin2
2cossin2
sin2
1cos
32
23
2
2
22
222
2
2
10
lr
lr
lr
lr
(18)
ºi
.2sinsin4
2sinsin2
2cossin2
sin2
1'cos
32
23
2
2
22
222
2
2
10
ψγλ+ψγλ−
−ψγλ−ψ−=β
lr
lr
lr
lr
(19)
În fine, unghiul instantaneu de oblicitate 1β al bielei secundare se scoate din succesiunea de relaþii de mai jos, folosind relaþiile (12), (13) si (14):
( )[ ]
( ) ( )[ ]
( )[ ] ( )
⎢⎢⎣
⎡⋅⎟
⎟⎠
⎞⎜⎜⎝
⎛ λ−−+αθ+αθ+
+−=−θ−α++θ−α−⋅
⋅−=+θ−α−θ−α−=
=−θ−α−=β−≈β−=β
AlrAAA
AyAyA
AyyA
yA
412sin2sin
42cos2cos
4
41
2sin2cos1
41sin2sin
21
sin211sin
211sin1cos
22
1
2
1
2
222
12
1
22
112
2
21
21
21
21
] ( )
⎟⎟⎠
⎞αγλ−αγ
λ+λ−
⎜⎜⎝
⎛−ψ−αθ−αθ⋅α
⋅γψλ+αγψλ−ψ⋅
122
22
122
22
22
22
222
22
111
21
2
2sin2sin2
2cos2cos22
sin2
cossinsincos2sin
2sinsin4
2cos2cossin4
sin
lAr
lAr
lAr
lArA
Alr
Alr
(20) Folosind relaþiile trigonometrice cunoscute:
( )
( )
( )
( )1111
1111
1111
1111
sin3sin21cos2sin
3coscos212cossin
3coscos212coscos
sin3sin212cossin
α+α=αα
α−α=αα
α+α=αα
α−α=αα
relaþia (20) dã dezvoltarea armonicã:
( )
( )
( )
( ) 12
12
12
22
2
12
22
2
12
2
12
2
2
222
2
22
1
3sin2cossin8
3cos2sinsin8
2sin2sin4
2sin4
2cos2cos4
2cos4
sin2cossin8
cossin4
1
cos2sinsin8
sinsin4
1
4sin
241cos
αθ−γψλ−
−αθ−γψλ−−α⎟⎟⎠
⎞γλ+
⎜⎜⎝
⎛+θ+α⎟
⎟⎠
⎞⎜⎜⎝
⎛γλ−θ+
+α⎥⎥⎦
⎤
⎢⎢⎣
⎡θ+γψλ+θψ⎟
⎟⎠
⎞⎜⎜⎝
⎛ λ−−+
+α⎥⎥⎦
⎤
⎢⎢⎣
⎡θ+γψλ+θψ⎟
⎟⎠
⎞⎜⎜⎝
⎛ λ−+
+⎟⎟⎠
⎞⎜⎜⎝
⎛λ+ψ−−=β
lrA
lrA
lr
Al
rA
lrA
lAr
lrA
lAr
lr
lrA
(21) Deplasarea pistonului se calculeazã cu relaþia (1), dupã ce vom preciza mai întâi:
( ) 111 coscoscos β+ψ−β+α= lrROP , (22) în care se cunosc relaþiile (15) ºi (21) ºi se obþine:
( ) [ −γψλ+α⎥⎦⎤θ+γψλ+
+⎢⎢⎣
⎡θψ⎟
⎟⎠
⎞⎜⎜⎝
⎛ λ−+γψλ++
+⎥⎥⎦
⎤
⎢⎢⎣
⎡λ+ψ−−+ψ⎟
⎟⎠
⎞⎜⎜⎝
⎛ λ−=
cossincos2sinsin8
sinsin4
1sinsin
4sin
24cos
41
12
2
222
222
1
rrA
ArrR
lr
lrlAlrOP
C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
21
( )
( )
( ) .3sin2cossin8
3cos2sinsin8
2sin
2sincos4
2sin4
2sin4
2cos
2coscos4
2cos4
2cos4
sin
2cossin8
cossin4
1
12
12
1
22
22
1
22
22
1
22
αθ−γψλ−
−αθ−γψλ−−α⋅
⋅⎟⎟⎠
⎞⎜⎜⎝
⎛γψλ−γλ+θ+α⋅
⋅⎟⎟⎠
⎞⎜⎜⎝
⎛γψλ+γλ−θ+α⋅
⋅⎥⎥⎦
⎤θ+γψλ+θψ⎟
⎟⎠
⎞⎜⎜⎝
⎛ λ−−
rA
rA
rl
rlA
rl
rlA
rAAr
(23) În (22), fãcând succesiv 01 =α ºi π=α1 , se obþin distanþele de la centrul de rotaþie la punctul mort interior 1iP , respectiv exterior 1eP , þinând
seama ºi de relaþiile anterioare (16)÷(19):
( )
ψγλ−
−ψγλ+ψγλ−
−ψ−+γψλ++ψγλ+
+ψ⎟⎟⎠
⎞⎜⎜⎝
⎛ λ−+=β+ψ−β+=
2sinsin4
2sinsin2
2cossin2
sin2
2coscos4
sinsin
cos4
1coscos
32
3
22
22
22
2
2
1001
lr
lr
lr
lrlrr
rRlrROPi
(24) ºi
( )
.2sinsin4
2sinsin2
2cossin2
sin2
2coscos4
sinsin
cos4
1'cos'cos
32
3
22
22
22
2
2
1001
ψγλ+
+ψγλ−ψγλ−
−ψ−+γψλ+ψγλ−
−ψ⎟⎟⎠
⎞⎜⎜⎝
⎛ λ−+−=β+ψ−β+−=
lr
lr
lr
lrlrr
rRlrROPe
(25) Astfel, deplasarea momentanã a pistonului secundar devine:
(),3sin3cos2sin
2cossincos
131312
12111101
α+α+α+
+α+α+α+=
bab
abaaRy p (26)
unde:
[
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪
⎨
⎧
θ−γψλ=
⎜⎜⎝
⎛⎟⎟⎠
⎞γλ−θ−γψλ=
⎥⎦⎤θ+γψλ−
⎢⎢⎣
⎡−θψ⎟
⎟⎠
⎞⎜⎜⎝
⎛ λ−+γψλ−=
θ−γψλ=
⎢⎢⎣
⎡
⎥⎥⎦
⎤γλ+θ−γψλ=
θ+γψλ−
−θψ⎟⎟⎠
⎞⎜⎜⎝
⎛ λ−−ψγλ−−=
⎟⎟⎠
⎞λ−+ψγλ−
−ψγλ+ψγλ−
⎜⎝⎛ −γψλ+γψλ+=
),2cos(sin8
2sin4
2sin4
2sincos4
1
)2cos(sin8
cossin4
1cossin1
)2sin(sin8
2cos4
2cos4
2coscos4
1
)]2sin(sin8
sinsin4
1sinsin1
442sinsin
4
2sinsin2
2cossin2
2coscos4
sinsin1
23
22
22
2
2
2
1
23
22
22
2
2
2
1
22
23
23
22
2
22
20
RrAb
lrlAr
Rb
rA
ArrR
b
RrAa
lrlAr
Ra
rA
ArrRR
a
lrlA
lr
lr
lr
rrRR
a
(27)
valorile pentru A ºi θ fiind precizate prin (11). Deci, pentru deplasarea pistonului, relaþia (25) indicã prezenþa armonicilor pare de ordinul II ºi impare de ordinul I ºi III. În particular, pentru mecanismul cu bielã secundarã calatã la un unghi egal cu unghiul dintre axele cilindrilor, condiþia care se pune este: γ=γ1 , deci 0=ψ (condiþia caracterizeazã mecanismele motoarelor cu cilindrii dispuºi în stea); în acest caz, coeficienþii (27) devin:
0
2sin4
2sin4
2sin4
1
00
2cos4
2cos4
2cos4
1
1
44sin
22cos
41
3
22
0
202
2
1
3
22
0
202
2
1
22
202
2
222
0
=
⎟⎟⎠
⎞⎜⎜⎝
⎛γλ−θ−γλ=
==
⎟⎟⎠
⎞⎜⎜⎝
⎛γλ+θ−γλ−=
−=
⎟⎟⎠
⎞⎜⎜⎝
⎛λ−+γλ−γλ+=
b
lrlAr
Rb
ba
lrlAr
Ra
a
lrlA
lrrR
Ra
(28) cu:
C 1C
C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 22
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
γλ−
γλ=θ
λ+γλ−=
cos
sinarctg
cos2
0
2
22
2
2
0
lr
rR
lr
lr
lr
lR
lRA
. (29)
Rezultã:
( )12121101 2sin2coscos α+α+α+= baaaRy p , (30) deci armonicile de ordinul III dispar. Pentru viteza ºi acceleraþia pistonului se obþin expresiile:
(
)13131212
11111
1
111
3cos33sin32cos22sin2
cossin
α+α−α+α−
−α+α−ω=α
⋅α
==
baba
baRdt
dddy
dtdy
w ppp
(31) ºi:
(
)13131212
111121
1
111
3sin93cos92sin42cos4
sincos
α−α−α−α−
−α−α−ω=α
⋅α
==
baba
baRdt
dddw
dtdw
a ppp
(32) Figura 2 prezintã, comparativ, cinematica mecanismului normal axat ºi a celui cu bielã principalã ºi biele secundare. La proiectarea mecanismului cu bielã principalã ºi bielã secundarã se impune, de obicei, condiþia de egalitate a raportului de comprimare ( 1ε ) din cilindrul secundar cu cel din cilindrul principal ( ε ),
atunci când dimensiunile acestor cilindri ºi pistoane sunt identice. Notãm RS 2= ºi 1S cursele
pistoanelor respective ºi cu cS , 1cS înãlþimile camerelor de ardere din chiulasã. Avem, folosind relaþiile (24) ºi (25):
Δ+=ψγλ−ψγλ+
+γψλ+=−=
Sl
rl
r
rROPOPS ei
2sinsin2
2sinsin
sinsin22
32
32
111
. (33)
Considerãm cã raportul de compresie pentru cilindrul principal este:
cSS
+=ε 1 , (34)
iar pentru cel secundar þinem cont cã înãlþimea spaþiului de ardere va fi:
( ) 111 Δ+=−+= ciicc SOPOPSS , (35) în care LROPi += , iP corespunzând punctului
mort interior pe axa cilindrului principal, iar 1iOP dat de relaþia (24). Deci:
.2sinsin4
2sinsin2
2cossin2
sin2
2coscos4
sinsincos4
1
32
3
22
222
2
22
1
ψγλ+
+ψγλ−ψγλ+ψ+−
−γψλ−ψγλ−ψ⎟⎟⎠
⎞⎜⎜⎝
⎛ λ−−=Δ
lr
lr
lr
lrl
rrrL
(36) Ca atare:
11
11 11
Δ+Δ+
+=+=εcc SS
SS
. (37)
Condiþia de egalitate a rapoartelor de comprimare dã:
1Δ+Δ+
=cc SS
SS ,
adicã:
Δ=Δ cSS 1 sau
1ΔΔ
=cS
S
Fig. 2
C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
23
Deci:
11
ΔΔ
=−ε (38)
Impunând condiþia:
rlL += , (39) specificã motoarelor în V ºi W, relaþia (38) poate fi scrisã sub forma:
( )⎥⎥⎦
⎤ψγλ−−ψ⎟
⎟⎠
⎞⎜⎜⎝
⎛γ
λ−γλ−
⎢⎢⎣
⎡−ψ⎟
⎟⎠
⎞⎜⎜⎝
⎛γ
λ−−ψγλ−⎟
⎠⎞
⎜⎝⎛ +
⎥⎥⎦
⎤
⎢⎢⎣
⎡ψ⎟
⎟⎠
⎞⎜⎜⎝
⎛γ
λ−γλ+ψγλ=−ε
2cossin214
2sinsin2
1sin2
cossin2
1sinsin4
1
2sinsin2
1sinsinsin21
2222
22
22
lr
lr
lr
lr
(40) Eliminând numitorul, relaþia (40) devine:
02cos2sincossin =+ψ+ψ+ψ+ψ edcba , (41) unde:
( )
( )
( )
( )( )( )
⎪⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪⎪
⎨
⎧
⎟⎠⎞
⎜⎝⎛ +−ε−=
γλ−−ε=
⎟⎟⎠
⎞⎜⎜⎝
⎛γ
λ−+ελ=
⎟⎟⎠
⎞⎜⎜⎝
⎛γ
λ−−ε=
γ+ελ=
lre
lrd
lrc
b
a
411
sin2114
sin2
112
sin2
11
sin1
2
22
22
. (42)
Notând:
2tg ψ
=x , (43)
relaþia (41) devine ecuaþie în necunoscuta x:
012
11
11
122
11
12
2
2
22
2
2
2
2
22
2
2
=+⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛
+−⎟
⎟⎠
⎞⎜⎜⎝
⎛
+
−+
++
−⋅
++
+
−+
+
ex
xxxd
xx
xxc
xxb
xxa
,
de unde, prin transformãri succesive, se obþine:
( ) ( ) ( )( ) ( ) .022
2223 234
=++−+−−−+−−−+
edbxcaxedxcaxedb
(44)
Rezolvarea ecuaþiei (44) dã, implicit, unghiul ψ ,
deci 1γ , unghiul la care trebuie calatã biela secundarã pentru asigurarea egalitãþii rapoartelor de comprimare. Dintre soluþii o vom alege pe aceea care satisface condiþia: o105÷=ψ . La motoarele cu cilindrii dispuºi în stea, impunând condiþia: 0=ψ în relaþiile (33) ºi (36), vom obþine:
SS =1 (45) ºi:
γ⎟⎠⎞
⎜⎝⎛ +λ+−−=Δ 22
1 sin1lr
lrrlL . (46)
Pentru a avea egalitatea rapoartelor de comprimare în toþi cilindrii, va trebui ca:
1Δ+=
cc SS
SS
adicã: 01 =Δ , de unde:
γ⎟⎠⎞
⎜⎝⎛ +λ++= 22 sin1
lr
lrrlL . (47)
Impunând raza r, se determinã lungimea bielei secundare din relaþia (47).
C 1C
C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 24
1.3. Cinematica motoarelor cu pistoane opuse Schema cinematicã a motoarelor cu pistoane opuse este constituitã din douã mecanisme biela-manivelã care acþioneazã fiecare asupra câte unui arbore cotit (in cazul motorului cu doi arbori cotiþi ca in figura 1), sau ambele asupra aceluiaºi arbore cotit (situaþia motorului cu un singur arbore cotit, figura 4). Pentru obþinerea unei distribuþii optime a gazelor, una dintre manivelele fiecãrui cilindru se amplaseazã decalat în raport cu cealaltã, cu un unghi ϕ faþã de 0o sau 180o; astfel, pistonul care acoperã ferestrele de evacuare este în avans, în timp ce pistonul care obtureazã ferestrele de baleiaj este în întârziere. Valoarea optimã a unghiului de avans se situeazã, de obicei, în gama 10÷15oRAC. 1.3.1. Cinematica motorului cu pistoane opuse
ºi doi arbori cotiþi În cele ce urmeazã, vom nota cu indicii 1 ºi 2 parametrii ºi elementele mecanismului care se referã la pistonul în avans, respectiv la cel în întârziere. Cu relaþia deja introdusã pentru unghiul de avans ϕ , vom avea:
ϕ+α=α 21 , (1) în care unghiul ϕ determinã poziþia manivelei în avans faþã de punctul mort cel mai apropiat, în momentul când pistonul în întârziere se aflã în
punctul mort interior p.m.i.1, ca în figura 1,b, în ipoteza: 0<ϕ <900. Intereseazã determinarea distanþei variabile y dintre cele douã pistoane. Considerând cã pistoanele sunt identice, adoptând ipoteza de calcul cã pistoanele au capul plat ºi neglijând distanþele de la axul bolþului (sau a capului de cruce) pânã la marginile de distribuþie ale pistoanelor respective, putem face observaþia cã distanþa x este cea dintre centrele de articulaþie dintre biele ºi pistoane. Pentru un calcul mai precis, se pot introduce corecþiile pentru distanþele mai sus menþionate, aceasta neafectând relaþiile de calcul decât prin suma a doua constante, ipotezele anterioare fiind, de altminteri, în concordanþã cu cele ce au stat la baza determinãrilor aferente mecanismului normal cu piston. Considerând originea citirii unghiurilor de manivela 1α ºi 2α (figura 1, c) poziþia manivelelor la punct mort interior, în ipoteza unor mecanisme cu dimensiuni geometrice diferite ( 2121 , LLRR ≠≠ ) ºi a sensurilor de rotaþie opuse (soluþie reprezentând avantaje din punct de vedere al echilibrãrii), vom avea, pentru distanta y dintre punctele curente P1 ºi P2, expresia:
021 yyyy pp ++= , (2) în care: yp1, yp2 sunt, respectiv, deplasãrile celor douã pistoane faþã de punctele moarte interioare corespunzãtoare, date de relaþiile:
C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56
Fig. 1

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
25
( ) ( )
( ) ( )⎥⎦
⎤⎢⎣
⎡α−
λ+α−=
⎥⎦
⎤⎢⎣
⎡α−
λ+α−=
22
222
11
111
2cos14
cos1
2cos14
cos1
Ry
Ry
p
p
, (3)
iar y0 este distanþa dintre poziþiile fixe ale celor douã puncte moarte superioare, care, cu excepþia unor constante, reprezintã, proporþional înãlþimea spaþiului de comprimare. Se noteazã: 12 / RRk R = , raportul dintre
lungimile razelor manivelelor ºi 12 / λλ=λk , raportul dintre alungirile celor doua biele. Introducând relaþiile (3) în (2) vom obþine, þinând cont ºi de defazajul dat de (1):
( ) ( )
( )[ ] ( )[ ]
( )
( )
( )
( ) ⎪⎭
⎪⎬⎫
αϕλ
−αϕ+λ
−
−αϕ−αϕ+−
⎪⎩
⎪⎨⎧
−⎥⎦
⎤⎢⎣
⎡++
λ++=αϕ
λ−
−α⎟⎟⎠
⎞⎜⎜⎝
⎛ϕ
λ+
λ−αϕ−
−αϕ+−⎟⎟⎠
⎞⎜⎜⎝
⎛+
λ+
λ++=
=+⎭⎬⎫
⎩⎨⎧
ϕ−α−λ
+ϕ−α−+
+⎥⎦
⎤⎢⎣
⎡α−
λ+α−=
λλ
λ
11
11
11
1
0111
22
12211
12
12102211
21
012
12
11
11
2sin2sin4
2cos2cos14
sinsincoscos1
14
12sin2sin4
2cos2cos44
sinsin
coscos44
2cos14
cos1
2cos14
cos1
kkkk
kk
Ry
kkkRR
RRR
RRyRR
RR
yR
Ry
RR
RR
RR
deci, ºi în acest caz, putem pune deplasarea totalã sub forma unei dezvoltãri armonice:
( )1212111101 2sin2cossincos α+α+α+α+= babaaRy (4) unde:
( )
( )
( )
⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪
⎨
⎧
ϕλ
−=
ϕ+λ
−=
ϕ−=ϕ+−=
++λ
++=
λ
λ
λ
......................................................
2sin4
2cos14
sincos1
14
1
12
12
1
1
1
010
kkb
kka
kbka
Ry
kkka
R
R
R
R
RR
(5)
Analizând expresia obþinutã (4), constatãm cã este analogã deplasãrii din cadrul unui mecanism cu piston normal dezaxat (datoritã persistenþei coeficienþilor b1 ºi b2), cu raza manivelei R1.
Introducând unghiurile auxiliare:
ϕ+ϕ
==θcos1
sinarctgarctg
1
11
R
R
kk
ab
(6)
ºi
ϕ+ϕ
==θλ
λ
2cos12sin
arctgarctg2
22 kk
kkab
R
R , (7)
putem scrie:
( )
( ) .2sin
sin
2122
22
1121
2101
⎥⎦⎤θ+α++
⎢⎣⎡ +θ+α++=
ba
baaRy (8)
Cursa totala a pistoanelor va fi diferitã de suma curselor pistoanelor, datoritã defazajului deja existent ºi a înãlþimii de compresie y0. De aceea, pentru determinarea valorilor extreme ale deplasãrii, vom deriva expresia (8) în raport cu variabila 1α :
( )
( ) .02cos
cos
2122
22
1121
21
1
=θ+α++
⎢⎣⎡ +θ+α+=
α
ba
baRddy
(9)
Ecuaþia (9) se rezolvã fie numeric, fie grafic; vom prezenta aceasta modalitate de rezolvare din urmã. Soluþiile ecuaþiei vor reprezenta intersecþiile dintre curbele de ecuaþie:
( ) ( )1121
2111 cos θ+α+=α baf
ºi
( ) ( )2122
2212 2sin2 θ+α+−=α baf .
Rezolvarea graficã reiese din figura 2. Se vor obþine, aºadar, patru valori ale unghiului de manivelã ale mecanismului în avans:
IV1
'''111 ,,, ααα ′′α′ pentru care deplasarea y
înregistreazã valori extreme. Prin introducerea acestora în (8) se poate reprezenta grafic variaþia
( )1α= yy . În figura 3 s-a prezentat aceastã variaþie rezultatã prin însumarea graficã a funcþiilor:
( ) .0111 constaRg ==α
( ) ( )1121
21112 sin θ+α+=α baRg
( ) ( )1122
22113 2sin θ+α+=α baRg
C C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 26
Pentru valorile de extrem ºi precizarea lor exactã, vom face analiza funcþionalã a mecanismelor, conform figurii 1: • manivela pistonului în avans la punct mort
interior, iar cea a pistonului în întârziere fãcând unghiul ϕ− (fig. 1,a), conducând la precizãrile:
ϕ−=α=α 21 ;0 , deci:
( )
( ) ( ) ( ) ;2cos14
cos1
00
222
1
⎥⎦
⎤⎢⎣
⎡ϕ−
λ+ϕ−=ϕ−
=
Ry
y
p
p
(10)
notãm:
( )ϕ−= 22 ps yy , (11)
indicele s referindu-se la poziþia faþã de un punct mort interior (sau în apropierea sa) al pistoanelor; deci:
20min syyy += ; (12) • manivela în avans face unghiul ϕ , iar cea în
întârziere la punct mort interior (figura 1,b); avem:
0; 21 =αϕ=α
Fig. 2
Fig. 3
C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
27
ºi:
( ) ( ) ( )
( ) ,00
2cos14
cos1
2
11
11
=
=⎥⎦
⎤⎢⎣
⎡ϕ−
λ+ϕ−=ϕ
p
sp
y
yRy (13)
deci: 10min syyy += ; (14) • manivela în avans la punct mort exterior ºi cea
în întârziere face unghiul ϕ=π (figura 1,d); vom avea:
( ) 11
21
2;
Ry p =πϕ−π=απ=α
( )
( ) ( ) ,2cos14
cos1
2
22
222
⎥⎦
⎤⎢⎣
⎡ϕ−
λ−ϕ−=
=ϕ−π−=
R
yRy pi
(15)
unde indicele i are semnificaþia analogã celei pentru indicele s; vom obþine:
20211max 22 iyyRRy −++= ; (16) • manivela în avans face unghiul ϕ+π , iar cea în
întârziere la punct mort exterior (fig. 1,e); avem: π=αϕ+π=α 21 ;
( )
( ) ( ) 11
1
111
2cos14
cos1
2
i
pi
yR
yRy
=⎥⎦
⎤⎢⎣
⎡ϕ−
λ−ϕ−=
=ϕ+π−=
(17)
( ) 22 2Ry p =π
aºadar:
10212max 22 iyyRRy −++= . (18) Valorile extreme reale ale deplasãrii pistonului vor fi cele date de (12), (14), (16) ºi (18); acestea se obþin pentru unghiurile de manivelã:
ϕ+π=απ=αϕ=α=α IV1111 ;"';";0' . (19)
Valorile (19) sunt cele reale, rezultate din analiza funcþionalã, în timp ce valorile ºi variaþia din figura 3 sunt teoretice. Relaþia (8) exprimã deplasarea pistonului unui mecanism fictiv echivalent, normal dezaxat cu raza ºi unghiul de manivelã R1 ºi respectiv 1α . Acesta
are o vitezã unghiularã 1ω , drept care viteza ºi acceleraþia vor fi date de:
( ) ( )⎥⎦⎤
⎢⎣⎡ θ+α++θ+α+⋅
⋅ω=α
ω=α
α==
2122
2211
21
21
111
11
1
2sin2sin baba
Rddy
dtd
ddy
dtdy
w
(20) ºi:
( ) ( )⎥⎦⎤
⎢⎣⎡ θ+α++θ+α+⋅
⋅ω−=α
ω=α
⋅α
==
2122
2211
21
21
21
11
1
1
2sin4sin baba
Rddw
dtd
ddw
dtdwa
(21) În fine, vom determina raportul de comprimare convenþional ca fiind:
0
max1y
y+=ε , (22)
în timp ce raportul real va fi dat de formula:
( ) ψ+ψ−ε=ε 1r , (23) unde ψ este partea din cursa totalã a pistoanelor, pierdutã fie la sfârºit de destindere (fig. 1,d) ºi atunci avem:
1max1 y
ye=ψ , (24)
fie la început de comprimare (fig. 1,e), când:
2max2 y
ya=ψ . (25)
S-au notat cu ya, ye înãlþimile marginii superioare a ferestrelor de baleiaj, respectiv de evacuare mãsurate de la poziþia pistoanelor în punct mort exterior. Deci se obþin relaþiile:
1max0
1max
1max11
1 yy
yy
yy ee
r +⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛−=ε (26)
ºi
2max0
2max
2max11
2 yy
yy
yy aa
r +⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛−=ε , (27)
unde ymax l,2 sunt date de relaþiile (16) ºi (18). Toate cele prezentate se pot particulariza pentru motorul cu pistoane opuse, cu doi arbori cotiþi ºi cu
C C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 28
mecanisme simetrice; vom pune RRR == 21 ºi
LLL == 21 , deci λ=λ=λ 21 ºi
1== λkkR (28) Deplasarea pistoanelor va fi datã tot de relaþia (8), în care coeficienþii au valorile:
( )
( )
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
ϕλ
−=
ϕ+λ
−=
ϕ−=ϕ+−=
+λ
+=
.2sin4
2cos14
sincos1
22
2
2
1
1
00
b
a
ba
Ry
a
(29)
Relaþiile (6) ºi (7) devin:
⎪⎪⎩
⎪⎪⎨
⎧
ϕ=ϕ+
ϕ=θ
ϕ=⎟
⎠⎞
⎜⎝⎛ ϕ
=ϕ+
ϕ=θ
2cos12sinarctg
22tgarctg
cos1sinarctg
2
1
(30)
iar (8) capãtã expresia:
( )⎥⎦
⎤⎢⎣
⎡ϕ+αϕ
λ+⎟
⎠⎞
⎜⎝⎛ ϕ
+αϕ
+= 1101 2sincos42
sin2
cosaRy .
(31)
În aceastã situaþie ( 21 RR = ; 21 λ=λ ), avem:
( ) ( ) iii yRyy =⎥⎦⎤
⎢⎣⎡ ϕ−
λ−ϕ−== 2cos1
4cos121 (32)
ºi
iyyRy −+= 0max 4 , (33) deci raportul de comprimare convenþional este identic pentru comprimare ºi destindere. În plus, în cazul inexistentei decalajului unghiular ( 0=ϕ ), coeficienþii b1 ºi b2 se anuleazã, iar deplasarea pistoanelor devine analogã cu a unui mecanism normal axat (excentricitatea relativa e=0). 1.3.2. Cinematica motorului cu pistoane opuse
ºi un singur arbore cotit Pentru acest tip de mecanism motor, ipotezele de calcul de la paragraful anterior rãmân valabile, cu observaþia cã:
ϕ+π+α=α 21 . (34)
Schema pentru determinarea cinematicii motorului cu pistoane opuse ºi un singur arbore cotit este reprezentatã în figura 4. Deplasarea pistoanelor va fi:
2021 2Ryyyy pp ++−= , (35)
în care s-a þinut cont de convenþia de exprimare a deplasãrii fiecãrui piston în parte, raportatã deci la punctul mort interior. Atunci, pentru 1py ºi 2py se menþine
valabilitatea relaþiilor (3); folosind relaþia (34), se obþine pentru (35) o expresie de aceeaºi formã cu (8), în care coeficienþii vor fi de data aceasta:
( )( )
( )
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
ϕλ
−=
ϕ+λ
−=
ϕ=ϕ−−=
+−λ
++=
λ
λ
λ
2sin4
2cos14
sincos1
14
31
12
12
1
1
010
kkb
kka
kbka
Ry
kkka
R
R
R
R
RR
(36)
iar unghiurile auxiliare devin:
⎪⎪⎩
⎪⎪⎨
⎧
ϕ+ϕ
=θ
ϕ−ϕ
−=θ
λ
λ
2cos12sin
arctg
cos1sinarctg
2
1
kkkkk
R
R
R . (36)
Valorile care conduc la extreme ale deplasãrii sunt tot cele date de (19), pentru care se obþin succesiv:
( )
( ) ( )⎥⎦
⎤⎢⎣
⎡ϕ−
λ−ϕ−=
=ϕ−π−−=
2cos14
cos1
2
22
222
R
yRy pi
(37)
( ) ( ) ( )⎥⎦
⎤⎢⎣
⎡ϕ−
λ+ϕ−=ϕ−= 2cos1
4cos1 2
222 Ryy ps (38)
( ) ( ) ( )⎥⎦
⎤⎢⎣
⎡ϕ−
λ+ϕ−=ϕ= 2cos1
4cos1 1
111 Ryy ps (39)
( )
( ) ( )⎥⎦
⎤⎢⎣
⎡ϕ−
λ−ϕ−=
=ϕ+π−=
2cos14
cos1
2
11
111
R
yRy pi
(40)
ºi
201min iyyy += (41)
102min syyy += (42)
C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
29
20211max 22 syyRRy −++= (43)
10212max 22 iyyRRy −++= (44) Pentru rapoartele de comprimare, ca ºi pentru particularizãrile specifice mecanismului simetric ( 1== λkk R ) ºi cu defazaj nul ( 0=ϕ ), se obþin relaþii analoge celor expuse în paragraful anterior.
Fig. 4
C C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 30
2. Dinamica mecanismului motor În urma analizei cinematicii mecanismului motor au rezultat, succesiv, deplasãrile, vitezele ºi acceleraþiile componentelor mecanismului. Acestea permit, în continuare, determinarea forþelor ºi momentelor ce acþioneazã asupra componentelor menþionate. Forþele ce acþioneazã în mecanismul motor pot fi împãrþite în mai multe categorii: forþe datorate presiunii gazelor din cilindru ºi din carter, forþe de inerþie ale maselor pieselor aflate în miºcare, forþe de greutate ºi forþe de frecare. Pentru studiul dinamic, prezintã interes primele douã tipuri de forþe, datoritã valorilor lor mult mai mari decât ale celorlaltor categorii.
2.1. Forþa de presiune a gazelor Presiunea exercitatã de gaze pe suprafaþa cilindrului determinã o forþa de presiune FP, datã de relaþia:
( )cp ppDF −π
=4
2, (1)
care, aplicatã unei piese în miºcare (pistonul), produce lucru mecanic, permiþând transformarea energiei termice a fluidului motor în energie mecanicã. În relaþia (1), s-au fãcut notaþiile: D-alezajul cilindrului; p-presiunea gazelor din cilindru; pc-presiunea existentã în carterul motorului: practic, se poate lua pc≈100 KN/m2. Întrucât presiunea gazelor ce evolueazã în cilindru este cunoscutã prin intermediul diagramei indicate, pe cale graficã, în coordonate p-V, este raþional ca desfãºurarea acestei diagrame în coordonate α−p sã se realizeze cu ajutorul unei construcþii grafice. Deoarece volumul generat de piston este direct proporþional cu deplasarea pistonului, se traseazã în câmpul diagramei, între abscisele corespunzãtoare celor douã puncte moarte, un semicerc a cãrui razã reprezintã, la scara, raza manivelei (fig. 1). Din centrul semicercului O, cãtre p.m.e. (Pe), se determinã un segment OO1, care, la aceeaºi scarã, sã reprezinte mãrimea 2/λR (corecþia Briggs). Din O1 se traseazã drepte care fac cu diametrul PiPe unghiurile α ºi care intersecteazã semicercul în punctul mobil M. Trasând din M o paralelã la axa presiunilor, se determinã punctele de intersecþie ale acestuia cu diagrama indicatã. Dacã motorul funcþioneazã dupã un ciclu în patru timpi (fig. 1) vor exista patru puncte de intersecþie, care vor reprezenta valoarea presiunii din cilindru corespunzãtoare unghiului de rotaþie a arborelui cotit: oα (admisie), oo360 α−
(comprimare), oo360 α+ (destindere) ºi oo720 α−
(evacuare). Dacã motorul funcþioneazã dupã un ciclu în doi timpi, vor exista numai douã puncte de intersecþie, corespunzãtoare poziþiilor arborelui cotit: oα
(destindere) ºi oo360 α− (comprimare). Observaþie: Construcþia graficã prezentatã permite, în acelaºi timp ºi interpretarea graficã a expresiei deplasãrii pistonului mecanismului normal axat. Deoarece λ are valori mici, unghiul δ este mic, astfel încât 1cos ≅δ ºi:
( )( )δ⋅α−α−≅
≅δ+α−=sinsincos
cosRR
OMOPPP ii , (2)
iar din triunghiurile OO1N ºi OMN rezultã:
δ=δ=αλ
= sinsinsin2
ROMRON ,
deci:
( )
( ) ( ) .2cos14
cos1
sin2
cos1 2
p
i
yR
RPP
=⎥⎦⎤
⎢⎣⎡ α−
λ+α−=
=⎥⎦⎤
⎢⎣⎡ α
λ+α−=
(3)
C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56
Fig. 1
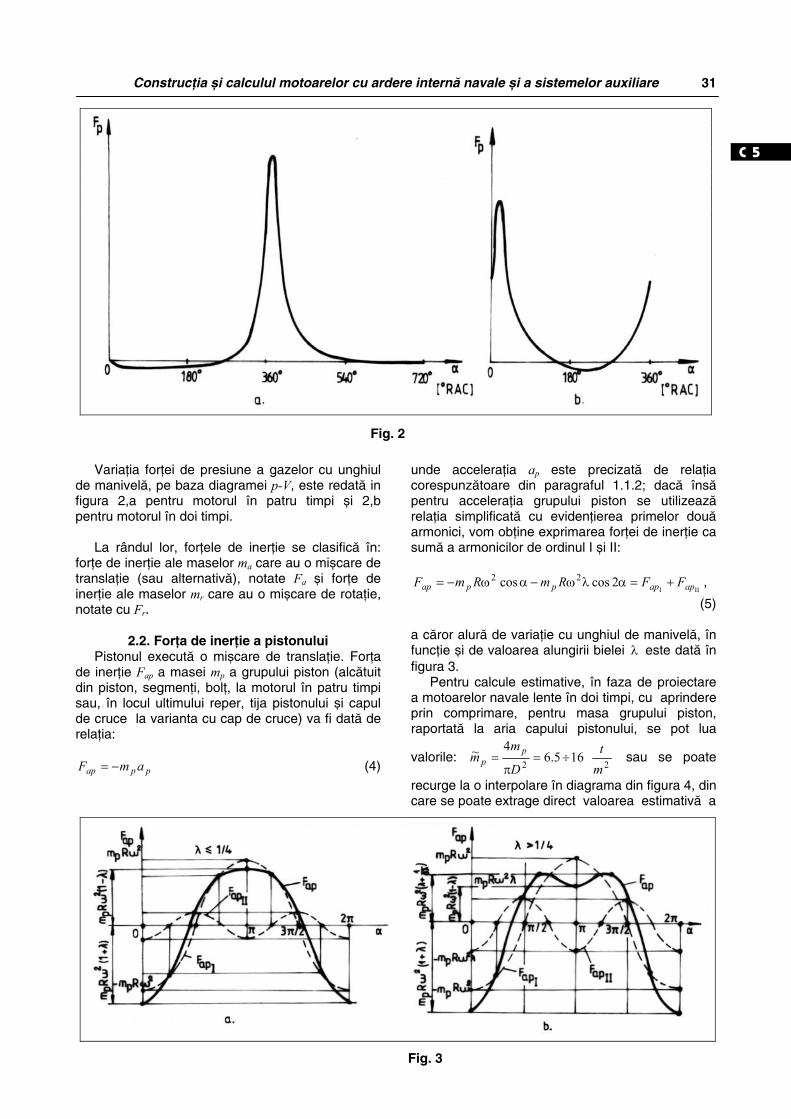
Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
31
Variaþia forþei de presiune a gazelor cu unghiul de manivelã, pe baza diagramei p-V, este redatã in figura 2,a pentru motorul în patru timpi ºi 2,b pentru motorul în doi timpi. La rândul lor, forþele de inerþie se clasificã în: forþe de inerþie ale maselor ma care au o miºcare de translaþie (sau alternativã), notate Fa ºi forþe de inerþie ale maselor mr care au o miºcare de rotaþie, notate cu Fr.
2.2. Forþa de inerþie a pistonului Pistonul executã o miºcare de translaþie. Forþa de inerþie Fap a masei mp a grupului piston (alcãtuit din piston, segmenþi, bolþ, la motorul în patru timpi sau, în locul ultimului reper, tija pistonului ºi capul de cruce la varianta cu cap de cruce) va fi datã de relaþia:
ppap amF −= (4)
unde acceleraþia ap este precizatã de relaþia corespunzãtoare din paragraful 1.1.2; dacã însã pentru acceleraþia grupului piston se utilizeazã relaþia simplificatã cu evidenþierea primelor douã armonici, vom obþine exprimarea forþei de inerþie ca sumã a armonicilor de ordinul I ºi II:
III2coscos 22
apapppap FFRmRmF +=αλω−αω−= ,
(5) a cãror alurã de variaþie cu unghiul de manivelã, în funcþie ºi de valoarea alungirii bielei λ este datã în figura 3. Pentru calcule estimative, în faza de proiectare a motoarelor navale lente în doi timpi, cu aprindere prin comprimare, pentru masa grupului piston, raportatã la aria capului pistonului, se pot lua
valorile: 22
165.64~
mt
D
mm p
p ÷=π
= sau se poate
recurge la o interpolare în diagrama din figura 4, din care se poate extrage direct valoarea estimativã a
Fig. 2
Fig. 3
C C C
C 5 C C C C
C 1C 1C 1C 1C 1C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 32
masei grupului piston; sã menþionãm cã valorile prin care s-a trasat diagrama 4 sunt în concordanþã cu cele existente actualmente în producþia de motoare navale.
2.3. Forþele de inerþie ale bielei Simplificând, prin reducerea miºcãrii plane, complexe, a bielei, la o translaþie a acesteia identicã cu a centrului sau de masa Gb ºi la o rotatie în jurul punctului Gb, vom considera cã un element de masã dmb situat la distanþa x de centrul Gb (fig. 5) va fi supus la trei acceleraþii: • acceleraþie identicã cu acceleraþia
bGa a
centrului Gb de translaþie a bielei; • acceleraþie normalã: 2
bnb xa ω= , (6)
din miºcarea lui Gb, bω fiind precizat în paragraful 1.1.3;
• acceleraþie tangenþialã:
xa btb ε= , (7)
din aceeaºi miºcare de rotaþie în jurul lui Gb, iar
bε este dat în acelaºi paragraf. Acestor acceleraþii le corespund urmãtoarele forte de inerþie: • forþa de inerþie din miºcarea de translaþie:
bGbib admdF −= , (8)
unde s-a notat cu mb masa bielei; • forþa de inerþie normalã elementarã:
bbibn dmxdF 2ω−= ; (9) • forþa de inerþie tangenþialã elementarã:
bbibt dmxdF ε−= . (10) Pe ansamblul bielei, rezultã urmãtoarele forþe:
∫ −==L
OGbibib b
amdFF , (11)
∫ ∫ =ω−==L
O
L
Obbibnibn xdmdFF 02 , (12)
în care integrala ∫ =L
Obdmx 0 , reprezentând
momentul static al bielei faþã de centrul sãu de masã Gb ºi
∫ ∫ =ε−==L
O
L
Obbibtibt xdmdFF 0 (13)
din aceleaºi considerente. Reamintim cã s-a notat cu L lungimea bielei. Observaþie: Integrala care exprimã momentul static este nulã numai faþã de centrul de masã Gb. Considerând miºcarea plan-paralelã compusã dintr-o translaþie a oricãrui alt punct caracteristic al bielei (de exemplu, articulaþia cu pistonul) ºi o rotaþie a acestuia, integrala nu se mai anuleazã ºi se obþin distribuþiile în lungul axei bielei ale masei acesteia (fig. 6,a), respectiv ale forþelor de inerþie tangenþiale neuniforme (fig. 6,b), posibilitãþile de estimare ale acestor mãrimi (eventual prin planimetrarea ariilor diagramelor respective) fiind dificile.
Fig. 4
Fig. 5
C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
33
Acesta este ºi motivul pentru care se preferã modalitatea prezentatã în continuare, de descompunere a masei bielei în douã mase concentrate, aºa cum va rezulta în continuare. Deoarece forþele de inerþie tangenþiale elementare situate de o parte ºi de alta a centrului Gb au direcþii paralele, ele formeazã un cuplu al cãrui moment este:
∫ ∫ ε−=ε−==L
O
L
ObbGbbibtibt b
IdmxxdFM 2 , (14)
unde ∫=L
ObbG dmxI
b
2 este momentul de inerþie al
bielei faþã de centrul Gb. Astfel, forþele de inerþie ale bielei se reduc la o forþã de inerþie din miºcarea alternativã Fib, concentratã în centrul Gb ºi un moment al cuplului forþelor de inerþie tangenþiale Mibt. Pentru simplificare este preferabil sã înlocuim biela prin douã mase concentrate în punctul P, care participã la miºcarea de translaþie a pistonului ºi în punctul M, care participã la miºcarea manivelei. Cu aceste consideraþii, relaþiile (11), (12) ºi (14) pot fi rescrise:
( )( )
( )⎪⎪⎩
⎪⎪⎨
⎧
ε+−=ε−=
−ω−==
+−=−=
bmbmpbpbbGibt
mbmpbpbibn
GbmbpGbib
LmLmIM
LmLmF
ammamF
b
bb
22
20 , (15)
unde cu mbp, mbm s-au notat masa bielei raportatã la piston, respectiv la maneton, iar Lp ºi Lm sunt distanþele de la centrul Gb la punctele P, respectiv M. Dupã simplificãri, ultimele trei relaþii conduc la sistemul echivalent:
⎪⎪⎩
⎪⎪⎨
⎧
=⋅+⋅
⋅=⋅
=+
bbGmbmpbp
mbmpbp
bbmbp
ILmLm
LmLm
mmm
22
,
,
, (16)
care exprimã matematic condiþiile înlocuirii bielei printr-un sistem de douã mase concentrate: masa totalã a sistemului sã fie egalã cu mb; sistemul sã aibã tot centrul de masã Gb; suma momentelor de inerþie ale tuturor maselor faþã de Gb sã fie egalã tot cu
bbGI . Ultima condiþie nu este respectatã când se
considerã numai masele mbp ºi mbm, însã eroarea este în general admisibilã, ea putând fi eliminatã în practicã prin adaosuri de material la ambele capete, operaþie numitã echilibrarea bielei. Deci, reþinând numai primele douã ecuaþii din sistemul (16), se obþin masele:
bp
bm
bm
bp
mL
Lm
mL
Lm
=
= ,. (17)
Aplicarea relaþiilor (17) este posibilã numai cunoscând poziþia centrului Gb (adicã una din distantele Lm sau Lp). Aceastã poziþie se determinã grafic, dacã se dispune de desenul bielei sau experimental, pentru o bielã construitã (prin cântãrire). În calcule preliminare, ponderea celor douã mase poate fi luatã în modul urmãtor:
⎩⎨⎧
≈
≈
bbm
bbp
mm
mm
725.0
275.0, (18)
Pentru mecanismul cu bielã principalã ºi biele secundare, se determinã sistemul de mase echivalent pentru mecanismul cu bielã principalã,
Fig. 6
Fig. 7
C C C
C 5 C C C C
C 1C 1C 1C 1C 1C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 34
prin relaþiile (17) ºi, analog, pentru mecanismul cu bielã secundarã (fig. 7):
⎪⎪⎩
⎪⎪⎨
⎧
=
=
11
11
bp
bm
bm
bp
ml
lm
ml
lm
, (19)
indicele 1 fiind aferent mãrimilor ce caracterizeazã mecanismul cu bielã secundarã conform paragraf 1.2). Astfel, masa corespunzãtoare miºcãrii de translaþie a mecanismului cu bielã principalã va fi:
MPMNmmm bmbpab
'1+= , (20)
iar masa corespunzãtoare miºcãrii de rotaþie a aceluiaºi mecanism va fi:
MPPNmmm bmbmrb
'1+= , (21)
relaþii în care s-a þinut cont de repartiþia fracþiunii mbm1 din masa bielei secundare concentratã în axa de articulaþie a acesteia cu biela principalã. Exprimând mãrimile geometrice care intervin în ultimele relaþii, utilizând ºi rezultatele (17), vom obþine:
( ) ( )[ ]
( ) ( )[ ]⎪⎪
⎩
⎪⎪
⎨
⎧
γ−−−+=
γ−−+=
∑
∑
≥
≥
2
11
2
11
1cos1
1cos1
i
pb
pbrb
i
pb
mbab
LirL
ll
miL
Lmm
Lir
ll
miL
Lmm
(22)
unde cu i s-a notat numãrul de cilindri, i-1 fiind deci numãrul de biele secundare, considerate identice. Relaþiile (22) au valoare de generalitate, deoarece pentru i=1 se obþin expresiile (17), specifice mecanismului normal; pentru i=2 se obþin relaþii pentru motorul în V; i=3 va caracteriza motorul în W, iar i>3 pe cel cu cilindrii în stea. Þinând cont de expresiile (22), vom determina forþa de inerþie a pãrþilor bielei aflate în miºcare de translaþie, respectiv de rotaþie, cu formulele:
pabab amF −= (23)
ºi:
2ω−= RmF rbrb , (24) în care ap are expresia datã în 1.1.2, iar expresia
2ωR reprezintã acceleraþia normalã a manivelei în miºcare de rotaþie, datã în paragraful 1.1.1.
Pentru forþa de inerþie a bielei secundare, vom avea corespunzãtor:
111 pbpab amF −= , (24)
unde mbp1, este dat de prima relaþie (19), iar ap1 de relaþia corespunzãtoare din 1.2. Ca ºi în cazul grupului piston, putem face o estimare a valorilor masei raportate a bielei:
⎥⎦
⎤⎢⎣
⎡÷=
π=
22156
4~mt
Dm
m bb . (25)
Se indicã în continuare o curbã experimentalã de variaþie a masei bielei motoarelor navale lente în raport cu aria capului pistonului (fig. 8).
Fig. 8
C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
35
2.4. Forþa de inerþie a manivelei Conform figurii 1, vom considera manivela, aflatã în miºcare de rotaþie uniformã cu viteza ω constantã, compusã din fusul maneton ºi cele douã braþe identice, ale cãror centre de masã se aflã la distanþa ρ de axa de rotaþie.
Notãm: mm-masa manetonului; bm ′ -masa braþului cotului. Forþa centrifugã de inerþie a masei manetonului este:
2ω−= RmF mrm , (1) iar a unui braþ:
2'' ρω−= brb mF . (2)
Pentru simplificare, se reduce masa braþului la axa manetonului; în acest scop, se impune condiþia egalitãþii energiilor cinetice:
2'
2' ω=ρω Rmm mbb , (3)
de unde masa braþului raportatã la maneton va fi:
Rmm bmb
ρ= '' . (4)
Forþa de inerþie a manivelei este:
( ) 2'' 22 ω+−=+=′ RmmFFF mbmrbrmrm . (5)
Relaþia (5) indicã faptul cã rmF ′ este o forþã rotitoare, de mãrime constantã, ce acþioneazã într-un plan normal la axa arborelui cotit.
2.5. Forþele totale de inerþie Din cele deduse anterior, se poate considera cã masele care participã la miºcarea alternativã sunt:
abpa mmm += , (6)
iar cele aflate în miºcare de rotaþie sunt:
rbmbmr mmmm ++= '2 . (7)
Corespunzãtor, forþele de inerþie ale maselor în miºcare alternativã vor fi:
paa amF −= , (8)
iar cele ale maselor în miºcare de rotaþie:
2ω−= RmF rr . (9) Se poate conchide cã forþa Fa este rezultatã prin suprapunerea armonicilor de ordinul I, ca unicã armonicã imparã ºi a unui numãr infinit de ordin par, în cazul în care mecanismul motor se considerã normal axat ºi acceleraþia ap este datã de relaþia corespunzãtoare din 1.1.2; în cazul limitãrii la expresia datã de relaþia simplificatã pentru ap ºi forþele totale de inerþie în translaþie se descompun în armonicile de ordinul I ºi II; aceste forþe de inerþie sunt variabile cu unghiul α ºi sunt îndreptate pe direcþia axei cilindrului. În schimb, pentru forþele totale de inerþie ale maselor în rotaþie, se poate relua observaþia cã acestea sunt variabile ca sens (acþioneazã ca vectori rotitori în plan normal la axa de rotaþie a arborelui cotit), dar cu mãrime constantã.
2.6. Forþele din mecanismul motor Deoarece forþa de presiune a gazelor ºi forþele de inerþie ale maselor în miºcare alternativã acþioneazã în lungul axei cilindrului, ele se vor însuma, generând o forþã rezultantã F, aplicatã de piston în articulaþie, datã de:
ap FFF += , (10)
aceasta descompunându-se în douã componente, aºa cum reiese din figura 2,a, valabilã pentru mecanismul normal axat; s-a indicat ºi convenþia de semne pentru forþele reprezentate. Componentele forþei totale F sunt deci:
β=
cosFB , (11)
dirijatã în lungul axei bielei ºi:
β= FtgN , (12) normalã pe axa cilindrului; aceasta din urmã genereazã frecarea dintre piston ºi cilindru, producând uzura celor douã organe. Intereseazã deci reducerea mãrimii forþei N. Presupunând cã masele mecanismului ºi condiþiile de realizare a ciclului motor nu se modificã, singura posibilitate de intervenþie asupra lui N va fi prin intermediul unghiului β . Vom avea:
Fig. 1
C C 3 C 4
C C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56
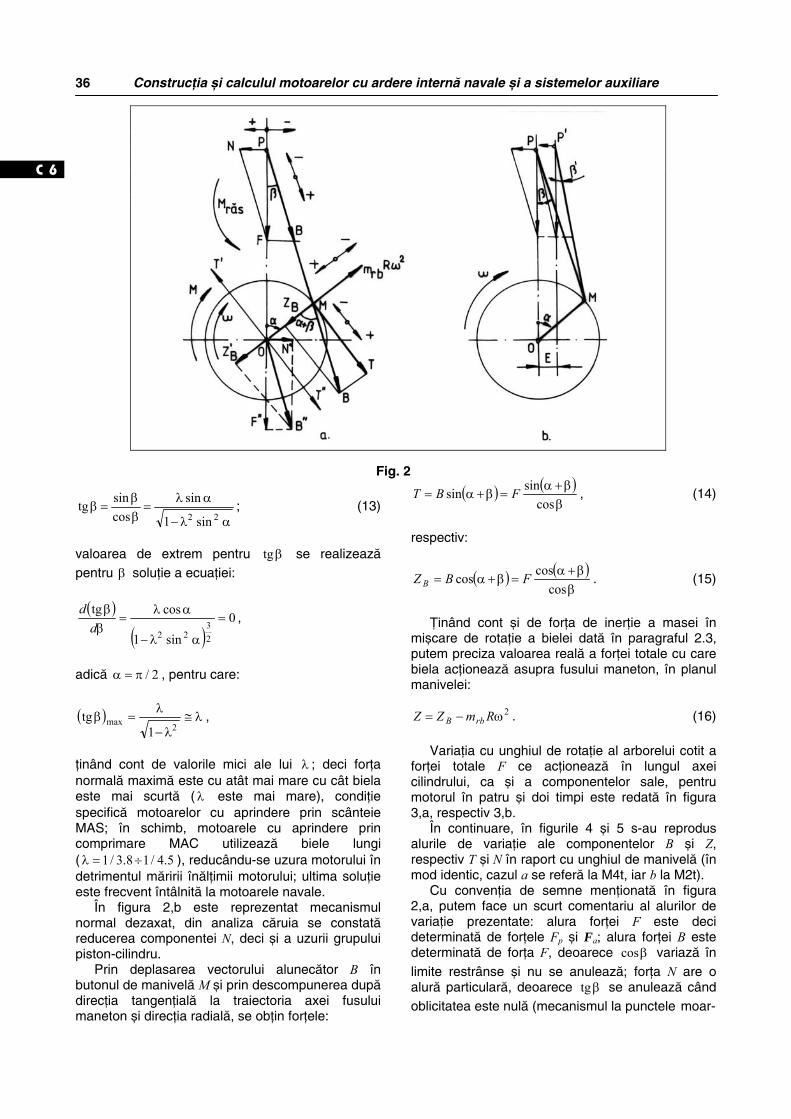
Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 36
αλ−
αλ=
ββ
=β22 sin1
sincossintg ; (13)
valoarea de extrem pentru βtg se realizeazã pentru β soluþie a ecuaþiei: ( )
( )0
sin1
costg
23
22
=
αλ−
αλ=
ββ
dd
,
adicã 2/π=α , pentru care:
( ) λ≅λ−
λ=β
2max1
tg ,
þinând cont de valorile mici ale lui λ ; deci forþa normalã maximã este cu atât mai mare cu cât biela este mai scurtã (λ este mai mare), condiþie specificã motoarelor cu aprindere prin scânteie MAS; în schimb, motoarele cu aprindere prin comprimare MAC utilizeazã biele lungi ( 5.4/18.3/1 ÷=λ ), reducându-se uzura motorului în detrimentul mãririi înãlþimii motorului; ultima soluþie este frecvent întâlnitã la motoarele navale. În figura 2,b este reprezentat mecanismul normal dezaxat, din analiza cãruia se constatã reducerea componentei N, deci ºi a uzurii grupului piston-cilindru. Prin deplasarea vectorului alunecãtor B în butonul de manivelã M ºi prin descompunerea dupã direcþia tangenþialã la traiectoria axei fusului maneton ºi direcþia radialã, se obþin forþele:
( ) ( )ββ+α
=β+α=cos
sinsin FBT , (14)
respectiv:
( ) ( )ββ+α
=β+α=cos
coscos FBZ B . (15)
Þinând cont ºi de forþa de inerþie a masei în miºcare de rotaþie a bielei datã în paragraful 2.3, putem preciza valoarea realã a forþei totale cu care biela acþioneazã asupra fusului maneton, în planul manivelei:
2ω−= RmZZ rbB . (16) Variaþia cu unghiul de rotaþie al arborelui cotit a forþei totale F ce acþioneazã în lungul axei cilindrului, ca ºi a componentelor sale, pentru motorul în patru ºi doi timpi este redatã în figura 3,a, respectiv 3,b. În continuare, în figurile 4 ºi 5 s-au reprodus alurile de variaþie ale componentelor B ºi Z, respectiv T ºi N în raport cu unghiul de manivelã (în mod identic, cazul a se referã la M4t, iar b la M2t). Cu convenþia de semne menþionatã în figura 2,a, putem face un scurt comentariu al alurilor de variaþie prezentate: alura forþei F este deci determinatã de forþele Fp ºi Fa; alura forþei B este determinatã de forþa F, deoarece βcos variazã în limite restrânse ºi nu se anuleazã; forþa N are o alurã particularã, deoarece βtg se anuleazã când oblicitatea este nulã (mecanismul la punctele moar-
Fig. 2
C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
37
Fig. 5
C C C C
C 6 C C C
C 1C 1C 1C 1C 1C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5
Fig. 3
Fig. 4

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 38
te) ºi schimbã de semn; forþa T are aproximativ alura lui N, deorece ( )β+αsin se anuleazã în punctele moarte ºi schimbã de semn; în sfârºit, forþa Z are ºi ea o alurã particularã. Pentru mecanismul cu bielã principalã ºi bielã secundarã (fig. 6), descompunerea forþelor totale pe direcþiile axei bielelor ºi perpendiculare pe axele cilindrilor este identicã. Relaþiile de calcul sunt:
1
11 cosβ=
FB (17)
omoloagã relaþiei (11) ºi
111 tgβ= FN (18) omoloagã relaþiei (12). Cu ipoteza fãcutã în paragraful 1.2., referitoare la identitatea dimensionalã a cilindrilor ºi pistoanelor (principal ºi secundar), se poate observa diferenþa existentã între forþele F ºi F1, datorate forþelor de inerþie ale maselor în miºcare alternativã, care sunt mai mici pentru mecanismul cu bielã secundarã (paragraf 2.3). Forþa B1 cu care acþioneazã biela secundarã asupra capului bielei principale se descompune în:
( ) ( )1
1111111 cos
sinsin
ββ+α
=β+α= FBT (19)
ºi
( ) ( )1
1111111 cos
coscos
ββ+α
=β+α= FBZ B . (20)
Prin însumarea componentelor tangenþiale ºi radiale corespunzãtoare celor douã mecanisme, se obþin forþele totale care acþioneazã asupra manivelei:
⎪⎩
⎪⎨
⎧
ω−=
+=+=
21
1
RmZZ
ZZZTTT
rbBtt
BBBt
t
, (21)
în care se þine seama cã forþele T ºi ZB sunt funcþii de unghiul α , iar T1 ºi ZB1 funcþii de 1α ; în determinarea acestor componente se va lua în considerare decalajul unghiular γ ; pentru mrb se poate lua formula corespunzãtoare de la 2.3. Vom exemplifica, în continuare, consideraþiile teoretice expuse anterior pentru motorul naval SULZER RTA58, ale cãrui caracteristici tehnico-funcþionale se înscriu în seria motoarelor moderne aflate în execuþie ºi exploatare: raport cursã/alezaj S/D=2.931; turaþia n=127 rot/min; alungirea bielei 4/1=λ ; raport de comprimare
13=ε ; puterea efectivã pe cilindru Peo=1590 kW. Cu datele menþionate, s-a trasat diagrama indicatã în figura 7 se prezintã variaþia forþelor Fp, Fa ºi a forþei totale axiale F; în figura 8 forþele B ºi Z, iar în figura 9 forþele T ºi N.
Fig. 6
Fig. 7
C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
39
Fig. 8
Fig. 9
Fig. 10
C C C C
C 6 C C C
C 1C 1C 1C 1C 1C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 40
2.7. Forþele din lagãre Lagãrele motoarelor cu ardere internã se compun din fusurile maneton sau palier ºi cuzineþii capului bielei, respectiv cei din carterul motorului. Cele douã repere, fus ºi cuzinet, se aflã în miºcare relativã unul faþã de celãlalt, fapt ce impune necesitatea cunoaºterii modului în care variazã forþele în jurul fusului, pentru determinarea zonei de încãrcare minimã (unde se recomandã plasarea orificiului de aducere a uleiului pe suprafaþa fusului), ca ºi în lungul circumferinþei cuzinetului (pentru analiza regimului de ungere hidrodinamicã a lagãrului de alunecare). Încãrcarea lagãrelor este condiþionatã de sistemul de forþe reprezentat în figura 1. Pentru fusul maneton încãrcarea este datã de relaþia:
ZTFBR rbm +=+=rr
, (1) iar pentru fusul palier de:
rmml FRR ′+=rrr
. (2) Cuzinetul din capul bielei va fi solicitat de forþa:
rbc FBRrr
+−= . (3) În relaþiile de mai sus, mãrimile forþelor menþionate sunt precizate în paragraful anterior; reamintim numai cã rmF ′
r reprezintã forþa de inerþie
în miºcare de rotaþie a cotului de manivelã, datã în paragraful 2.4, iar rbF
r este forþa de inerþie a masei
bielei în miºcare de rotaþie (raportatã la maneton), datã în paragraful 2.3.
2.7.1. Forþele din lagãrul maneton Forþa care încarcã fusul maneton este datã de relaþia (1). Însumarea componentelor se face vectorial, iar construcþia graficã prin care se reali-
zeazã aceasta se numeºte diagrama polarã a fusului maneton. Pentru motorul naval Sulzer RTA58, se prezintã, în figura 2, cotul arborelui cotit, cu sistemul de forþe pentru o poziþie particularã a mecanismului motor ( RACo120=α ). Deoarece în orice reprezentare în coordonate polare a unui punct intereseazã atât modulul vectorului de poziþie al punctului respectiv, cât ºi valoarea unghiului polar, vom face aceste precizãri ºi în cazul de faþã:
22 ZTRm += (4) ºi:
⎟⎠⎞
⎜⎝⎛=ϕ
TZarctg , (5)
sistemul de axe fiind dat de axa cotului maneton ºi normala la acesta. În afarã de aceastã metodã analiticã, vom prezenta ºi o metodã graficã de trasare a diagramei polare a fusului maneton. Aceasta se bazeazã pe
însumarea vectorialã a forþelor B ºi rbFr
prin metoda paralelogramului forþelor sau prin deplasarea vectorului rbF
r cu extremitatea în M, prin
metoda triunghiului. Se obþine astfel originea vectorului rbF
r în punctul Om, numit polul maneton.
Extremitatea vectorului mRr
este un punct al polarei cãutate. Metodologia de trasare a polarei manetonului este redatã în figura 3. Ipoteza de bazã este aceea de a presupune cã manivela este fixã, iar biela se roteºte în sens invers sensului real de rotaþie, efectul faþã de situaþia realã de funcþionare fiind acelaºi, datoritã miºcãrii relative existente între fus
Fig. 2
Fig. 1
C 2 C 3
C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
41
ºi cuzinetul din bielã. Se traseazã un cerc cu centrul în punctul M, cu raza egalã, la scara convenabilã, cu lungimea bielei. Pe diametrul vertical din M se construieºte în jos un segment OM egal cu raza de manivelã (evident la aceeaºi scarã a lungimilor). Cu centrul în O se traseazã un cerc de razã arbitrarã, care se împarte în 12 pãrþi egale, prelungirea razelor corespunzãtoare acestor puncte de diviziune intersectând cercul cu centrul în M în punctele:
( )01212,...,2,1,0, PPiPi ≡= . Se unesc punctele Pi cu M; triunghiurile OMPi vor reprezenta la scarã, mecanismul motor în poziþiile caracteristice (α =0o; 30o; 60o;...; 360o), în ipoteza cã OM este fix. La o scarã convenabil aleasã pentru forþe, se fixeazã forþa rbF
r cu extremitatea în M, iar originea va fi Om,
polul maneton. Din diagrama de variaþie a forþei B se iau valorile eforturilor din lungul bielei pentru poziþiile deja menþionate ale mecanismului. Aceste forþe se aºeazã cu originea în M, pe direcþiile bielei în sensul real (a se vedea convenþia de semne din paragraful 2.6).
Unind polul Om cu extremitatea lui B , se obþin forþele mR
r pentru diversele poziþii ale
mecanismului; unind apoi extremitãþile vectorului B (punctele 0, 1, 2,..., 12) se obþine diagrama polarã a fusului maneton. Pe baza diagramei polare, se poate construi diagrama cartezianã a forþei mR în funcþie de unghiul de manivelã (fig. 4). Se poate defini ºi o valoare medie a forþelor mR , necesarã determinãrii presiunii medii pe cuzinet ºi coeficientul de încãlzire al lagãrului, prin:
( )∫ αα=CT
Om
cm dR
TR 1
, (6)
sau, cu aproximaþie satisfãcãtoare:
∑=
='
1'1 n
imm i
Rn
R , (7)
unde n′ -numãrul de citiri ale valorilor lui mR din
diagrama cartezianã; cT -perioada ciclului motor, datã de:
πτ=cT , (8) τ fiind indicele de realizare a ciclului: 2=τ pentru M2t ºi 4=τ pentru M4t. Revenind la figura 3, putem observa cã forþa
mRr
, cu mãrimea, direcþia ºi sensul precizate, va fi preluatã pe faþa opusã a fusului maneton. Deci diagrama realã va fi rotitã cu 180o în sensul de rotaþie al arborelui cotit. Astfel se va constata cã suprafaþa cilindricã a fusului maneton situatã în regiunea dinspre axa de rotaþie a arborelui cotit va fi mai puternic solicitatã ºi deci supusã unor uzuri mai mari. În regiunea cel mai puþin solicitatã este raþional a fi plasat orificiul de circulaþie a uleiului prin fus. Poziþia orificiului de ungere cu ulei se stabileºte prin aºa-numita diagrama calitativã de uzurã (paragraf 10.5.1). Pentru determinarea diagramei polare a forþei ce solicitã cuzinetul din capul bielei, pe baza analizei din figura 2, se considerã ca fiind componente ale
acesteia urmãtoarele forþe: forþa ( B− ) egalã ºi de sens contrar cu cea din lungul axei bielei care solicitã fusul maneton (conform principiului reacþiunii) ºi forþa rbF
r. Rezultanta ce acþioneazã pe
cuzinet este datã de relaþia (3). Metoda de trasare a polarei cuzinetului de bielã este analiticã, observându-se cã mãrimea forþei cR este:
Fig. 3
Fig. 4
C C C C C
C 7 C C
C 1C 1C 1C 1C 1C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5
Fig. 3

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 42
( )β+α++= cos222 BFFBR rbrbc , (9)
iar unghiul polar este:
( )c
rb
RFB β+α+
=ϕcos
arccos' . (10)
Cunoscând variaþia cu unghiul de manivelã a mãrimilor anterioare, s-a reprezentat în figura 5 diagrama polarã a cuzinetului de bielã. ªi în acest caz, pentru corelarea diagramei polare cu suprafaþa cuzinetului, se impune rotirea cu 180o a diagramei polare în sensul de rotaþie a arborelui cotit. Se constatã cã solicitãrile la uzurã ale cuzinetului vor fi mai mari în semicuzinetul din corpul bielei faþã de cel montat în capac. Ca ºi în cazul fusului maneton, se poate determina ºi în acest caz valoarea rezultantei medii cR . Pentru motoarele cu bielã principalã ºi biele secundare, pentru trasarea diagramelor polare se folosesc, în locul forþelor T ºi Z, forþele Tt ºi Zt date de relaþiile corespunzãtoare din paragraful 2.6. La motoarele cu cilindrii în V, cu sistemele de ambielaje uzuale (cu biele alãturate sau interferate în furcã), se vor însuma algebric forþele Ts, Td ºi respectiv Zs, Zd corespunzãtoare cilindrilor stâng respectiv drept, þinând seama de decalajul unghiular funcþional dintre cilindrii din cele douã linii, relaþiile de calcul fiind:
⎩⎨⎧
+=+=
ds
sd
ZZZTTT
. (11)
În figura 6,a ºi b, este prezentatã diagrama polarã a fusului maneton ºi a cuzinetului de bielã, pentru cazul unui motor în patru timpi.
2.7.2. Forþele din lagãrul palier Fusul palier este încãrcat de forþa lR
r, datã de
relaþia (2). Din figura 1 se constatã cã, prelungind segmentul OmM în jos cu segmentul OmOl, care reprezintã mãrimea forþei rmF
r, vom obþine vectorul
rezultant lRr
unind punctul Ol cu extremitatea
vectorului mRr
; punctul Ol se numeºte polul palier. Aceasta înseamnã cã (fig. 1 ºi 2) unind polul Ol cu punctul Om (care aparþine diagramei polare a manetonului) vom putea citi forþele lR
r din însãºi
diagrama manetonului. Un fus palier (xy) situat între douã coturi x ºi y este încãrcat de o forþã Rlxy depinzând de acþiunea rezultantelor Rlx ºi Rly aferente acestor coturi asupra fusului considerat (fig. 7):
lylxlxy RRR ''rrr
+= , (12) unde:
2';
2' ly
lylx
lxR
RR
R
rr
rr
== . (13)
Fig. 5 Fig. 6
C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
43
Pentru valabilitatea relaþiilor (13), s-a considerat cã fusurile au aceeaºi lungime; în caz contrar, se determinã reacþiunile din ecuaþia de momente. Variaþia forþei lxyR
r se stabileºte construind
diagrama polarã a fusului palier, în funcþie de decalajul dintre cele douã rezultante lxR
r ºi lyR
r,
care este condiþionat de dispunerea unghiularã a coturilor ºi de decalajul funcþional dintre cilindri (problema ordinii de aprindere ºi a decalajului unghiular dintre douã aprinderi urmeazã a fi tratatã în paragrafele ulterioare). Procedura de trasare graficã a diagramei polare a palierului dintre coturile x=1 ºi y=2 (palier intermediar notat II) ale motorului naval Sulzer RTA58 cu i=4 cilindri în linie este ilustratã în figura
8. Cilindrii fiind identici, diagramele polare vor fi ºi ele identice. Se aºeazã diagrama polarã a fusului maneton pe axele celor douã braþe adiacente cu punctele Ol în centrul fusului palier; se însumeazã apoi 1lR
r ºi 2lR
r dupã regula paralelogramului.
De exemplu, pentru o120=α se citeºte pentru
cilindrul 1, 0120
1lR ; cilindrul 2 fiind cu trei aprinderi în urmã faþã de cilindrul 1 (pentru ordinea de aprindere 1-3-4-2), decalajul unghiular va fi
oo 270903 =⋅ , adicã cilindrului 2 îi va corespunde un unghi de manivelã α′ , dedus din ecuaþia
( ) 00 270'360 =α−+α . Rezultã cã o210=α′ . Deci
pe diagrama polarã a cilindrului 2 se citeºte 0210
2lR .
Se vor însuma vectorial cele douã forþe 0120
1lR ºi 0210
2lR ; rezultanta va fi dublul forþei cãutate 000 120210
21201 2 lIIll RRR =+ . Ne vom limita deci la citirea
semidiagonalei din paralelogramul forþelor. Segmentele OOl reprezintã, la scarã, mãrimea forþei efective ce solicitã fusul palier. Repetarea procedeului conduce la construcþia diagramei polare a fusului palier. Pentru arborele cotit al motorului RTA58 cu patru cilindri în linie s-au calculat ºi trasat în figura 9, urmãtoarele: a). schema axonometricã a arborelui cotit ºi steaua manivelelor aferentã; b). polarele palierelor extreme I ºi V; c). polara palierului intermediar II; d). polara palierului median III; e). polara palierului intermediar IV. Se
Fig. 7
Fig. 8
C C C C C
C 7 C C
C 1C 1C 1C 1C 1C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 44
menþioneazã cã numai figura 9,b s-a prezentat rotitã cu 180o faþã de diagrama rezultatã din calcul. Cu observaþiile din subparagraful anterior, vom transpune ºi în acest caz diagramele polare rezultate în coordonate carteziene (fig. 10,a-palierele extreme I ºi V; fig. 10-palierul intermediar II; fig. 10,c-palierul median III; fig. 10,d-palierul intermediar IV). Vom defini ºi valorile medii ale forþelor ce încarcã fusurile paliere, ca ºi in cazul manetonului:
( )∫ αα=CT
lc
l dRT
R0
1. (14)
În calcule practice vom aplica formula de însumare:
∑=
='
1'1 n
ilil R
nR , (15)
unde n' ºi Tc au semnificaþiile prezentate la calculul valorii medii a forþei ce încarcã fusul maneton. Diagrama polarã a fusului palier al motoarelor cu mecanism cu bielã principalã ºi biele secundare se construieºte asemãnãtor, cu folosirea forþelor totale Tt ºi Zt. Pentru lagãrele palier ale motoarelor cu cilindrii în V ºi biele alãturate se considerã cã pe fiecare maneton sunt articulate câte douã biele, una fiind
articulatã de un piston al liniei din dreapta, iar cealaltã de un piston al liniei din stânga. Se va þine cont de decalajul unghiular funcþional dintre cele douã linii, ca ºi de ordinea de aprindere pentru determinarea forþelor Td, Ts, Zd, Zs, Frbd, Frbs, F'rmd, F'rms. Din ecuaþiile de moment se poate determina rezultanta ce acþioneazã asupra fusului palier. Calculele sunt suficient de sofisticate ºi necesitã un volum considerabil de lucru. Pentru determinarea polarei forþei ce solicitã cuzineþii de palier, se considerã acþiunea forþelor B ºi F aferente celor douã coturi alãturate, reduse la mijlocul palierului dintre ele.
Fig. 9
Fig. 10
C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
45
2.8. Momentul motor Produsul dintre forþa tangenþialã la traiectoria axei fusului maneton T ºi raza de manivelã R reprezintã momentul motor instantaneu al motorului monocilindric, dat de relaþia:
TRM = . (1) Aºadar, alura de variaþie a acestui moment cu unghiul de manivelã va fi similarã cu cea a forþei T; aceste variaþii sunt reprezentate în figura 1: variaþia lui M pentru motor în patru timpi (fig. 1,a) ºi pentru doi timpi (fig. 1,b). Conform principiului acþiunii ºi reacþiunii, momentul M produce un moment de reacþiune care tinde sã rãstoarne motorul, în timp ce M roteºte arborele cotit. Din figura schemei sistemului de forþe din mecanismul motor (paragraf 2.6), se poate constata cã, punând în centrul de rotaþie O sistemul de forþe (T',T''), egale cu T ºi de sens contrar între ele ºi deplasând forþa ZB, ca vector alunecãtor, cu originea tot în O ( BZ ′ ), sistemul de forþe nou introduse nu produce nici un efect suplimentar asupra mecanismului motor. În schimb, se poate face interpretarea momentului motor M ca fiind produs de cuplul T-T', de unde ºi denumirea de moment al cuplului motor; forþele BZ ′ ºi T ′′ se transmit reazemelor motorului ºi dau o rezultantã B ′′ care se descompune în N ′′ ºi F ′′ . Forþele N ºi N ′′ acþioneazã asupra pãrþilor fixe ale motorului, cuplul NN ′′− , generând un moment de rãsturnare rasM , dat de:
( )
( ) MTRRFRF
RLRF
LRFOPFOPNM ras
==ββ+α
=⎟⎟⎠
⎞⎜⎜⎝
⎛β
βα
+α⋅=
=⎟⎠⎞
⎜⎝⎛ β+α⋅β=
=β+α⋅β=⋅β=⋅=
cossincos
sinsincostgβ
coscostg
coscostgtg
(1’)
Deºi MM ras = , motorul monocilindric nu este echilibrat, deoarece forþele care genereazã aceste momente acþioneazã asupra unor organe diferite ale motorului. Vom defini momentul motor mediu al motorului monocilindric acea valoare care produce în perioada ciclului un lucru mecanic egal cu cel produs de momentul motor instantaneu, dat de:
( )∫ αα=MT
OMdM
TM 1
, (2)
unde perioada de variaþie a momentului, TM, este egalã cu perioada Tc, datã de relaþia τπ== cM TT , cu τ -numãrul de timpi de realizare a ciclului motor ºi i -numãrul de cilindri. Determinarea lui M se obþine prin planimetrarea ariei diagramei 1, relaþia aproximativã de calcul fiind:
∑=
='
1'1 n
iiM
nM , (2’)
n′ fiind numãrul de poziþii caracteristice ale mecanismului motor (poziþii precizate de unghiul de manivelã α ) pentru care se citesc din diagrama momentului instantaneu valorile Mi. Din analiza figurii 1 se poate constata cã momentul motor instantaneu al motorului monocilindric are variaþii importante, care produc o miºcare de rotaþie neuniformã a arborelui cotit. Variaþiile momentului instantaneu al motorului monocilindric se caracterizeazã prin gradul de neuniformitate al momentului motor, definit prin:
MMM
Mminmax −=δ . (3)
La motorul policilindric vom avea un moment
Fig. 1
C C C C C C
C 8 C
C 1C 1C 1C 1C 1C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 46
motor rezultant, care se determinã prin însumarea momentelor produse de fiecare cilindru în parte, operaþie care se efectueazã þinând cont de decalajele unghiulare care separã funcþionarea cilindrilor care se aleg, în general, egale între ele. Perioada de variaþie a momentului rezultant va fi:
iiT
iT
T cMM
τπ===
Σ (4)
iar
iiTc τπ
==δ , (5)
unde δ reprezintã decalajul unghiular sau unghiul dintre douã aprinderi succesive. Egalitatea dintre TM ºi δ , reprezentând condiþia uniformitãþii aprinderilor, furnizeazã ºi modul de însumare a momentelor motoare la un motor policilindric, ilustratã pentru cazul particular al motorului RTA58. În figura 2 se prezintã variaþia cu unghiul de manivelã a momentului motor monocilindric, iar în figura 3 modul de însumare pentru motorul cu doi cilindri (fig. 3,a), respectiv pentru motorul cu patru cilindri (fig. 3,b). Spre exemplu, pentru cazul i=2 cilindri avem: TM=Tc=360o, iar
ΣMT =δ=360o/2=180o. În acest caz,
între douã aprinderi succesive, în fiecare cilindru pistonul executã o cursã completã, ciclurile fiind decalate cu 180o, astfel cã în fiecare cilindru se reproduce câte o cursã din cele douã care sunt efectuate de un singur piston într-un singur cilindru, într-un ciclu. Ca atare, în intervalul (0÷180)o (fig. 2) pistonul din cilindrul 1 executã cursa de destindere-evacuare, iar cilindrul 2 cursa de admisie-comprimare. Deci în intervalul δ se reproduce
fiecare porþiune a momentului motor al unui cilindru (fig. 3,a). Când manivela cilindrului 1 s-a rotit cu
oα RAC, manivela cilindrului 2 se roteºte cu ( 180+α )oRAC. Aºadar, în ipoteza cilindrilor identici, pentru determinarea momentului rezultant ΣM este suficient sã se utilizeze doar variaþia momentului motor monocilindric ºi sã se însumeze, în perioada δ , valorile momentului motor decalate corespunzãtor. Ca ºi la motorul monocilindric, vom defini un moment motor mediu al motorului policilindric, prin:
( ) ( )
( ) .1
11
0
0 0
∫
∫ ∫
==
=⋅=⋅=Σ
Σ
ΣΣΣ
M
MM
T
M
T iT
MM
MidMT
i
dM
iT
dMT
M
αα
αααα
(6)
În expresia (6), s-a avut în vedere faptul cã, în intervalul δ=
ΣMT , se regãsesc suprapuse toate
fracþiunile curbei de variaþie a momentului motor monocilindric, rezultând:
( ) ( )∫ ∫Σ
αα=ααΣ
M MT T
dMdM0 0
. (7)
Totodatã definim ºi gradul de neuniformitate al momentului motor policilindric cu relaþia:
Σ
ΣΣ −=δ
Σ MMM
Mminmax . (8)
Fig. 2
C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
47
Dacã în motorul policilindric aprinderile s-ar declanºa simultan în toþi cilindrii, ar însemna cã:
maxmax MiM =Σ , iar minmin MiM =Σ . Cum, în
general, MiM =Σ -relaþia (6), ar rezulta cã
MM δ=δΣ
.
Avantajul îndeplinirii condiþiei uniformitãþii aprinderilor este repartizarea uniformã a valorilor maxime ºi minime pe perioada unui ciclu, deci micºorarea gradului de neuniformitate: MM δ<δ
Σ.
Pentru motorul RTA58 se prezintã, în figura 4, variaþia cu unghiul de manivelã a momentului motor pentru i=1;4;6;8 cilindri, ca ºi valorile gradului de neuniformitate ºi reducerea sa. Aºadar, cu cât numãrul de cilindri este mai mare, cu atât perioada momentului motor rezultant se micºoreazã, curba ΣM devine mai regulatã, iar gradul de neuniformitate se reduce de aproximativ 9 ori, când se trece de la 1 la 8 cilindri. Totodatã, trebuie menþionat faptul cã soluþia de motor în doi timpi, având perioada ciclului mai micã, conduce, de asemenea la reducerea lui Mδ . La mecanismul motor cu bielã principalã ºi biele secundare, forþa B1, precizatã în paragraful 2.6, cu care biela acþioneazã asupra capului bielei principale, determinã un moment M1, a cãrui mãrime se determinã din examinarea schemei mecanismului respectiv:
( ) ( )11111 sinsin β−ϕ⋅=β−ϕ⋅= rBMNBM , (9) în care punctul N reprezintã articulaþia dintre biela principalã ºi cea secundarã. Introducând, pentru unghiurile care intervin în formula anterioarã, relaþiile dintre unghiuri, vom obþine:
Fig. 3
Fig. 4
C C C C C C
C 8 C
C 1C 1C 1C 1C 1C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 48
( ) ( )[ ]γ−γ+β−β⋅−= 1111 sinrBM , (10) unde semnificaþia mãrimilor 11 ,,,, γγββr sunt precizate în paragraful 1.2. Momentul M1 cu care biela secundarã acþioneazã asupra capului bielei principale exercitã un efect de amplificare sau diminuare a forþei normale N cu care pistonul articulat cu biela principalã este aplicat pe suprafaþa cilindrului respectiv. Acesta este ºi motivul pentru care, la motoarele cu cilindrii în V, biela secundarã se plaseazã înaintea celei principale, realizându-se diminuarea uzurii în grupul piston-cilindru principal. 2.9. Uniformizarea miºcãrii de rotaþie a arborelui
cotit Consideraþiile anterioare privind cinematica ºi dinamica mecanismului motor s-au fãcut în baza ipotezei constanþei vitezei unghiulare a arborelui cotit, .const=ω În realitate, datoritã miºcãrii alternative a pistoanelor în cilindrii motorului ºi variaþiei mari a presiunii gazelor în aceºtia, apar variaþii importante ale forþelor tangenþiale, deci ºi ale momentului motor rezultant ΣM . Prin urmare, apar ºi diferenþe mari între valorile momentului efectiv ΣM ºi cea constantã a momentului
rezistent, reaM , opus de agregatul antrenat de motor (de exemplu, în aplicaþia navalã, elicea), conform schemei din figura 5.
La rândul lor, aceste diferenþe implicã variaþii corespunzãtoare ale energiei cinetice a maselor aflate în miºcare, deci ºi a vitezei unghiulare a arborelui cotit. Vom defini gradul de neuniformitate a miºcãrii arborelui cotit prin raportul:
ωω−ω
=δωminmax , (11)
atunci când funcþionarea neuniformã a motorului se
produce între valorile maxω , minω ale vitezei unghiulare a arborelui cotit. S-a notat cu ω viteza unghiularã medie a arborelui cotit:
2minmax ω+ω
=ω . (12)
Gradele de neuniformitate folosite uzual pentru motoarele navale ce antreneazã direct elicea sunt cuprinse în gama de valori 1/20÷1/40. Neglijând, ca ºi în cazul studiului forþelor din mecanismul motor, valoarea momentanã a momentului corespunzãtor pierderilor mecanice proprii ale motorului, vom putea scrie ecuaþia de miºcare a arborelui cotit sub forma:
ε=−Σ 0JMM rez , (13) unde acceleraþia unghiularã a arborelui cotit este:
dtdω
=ε , (14)
iar cu J0 s-a notat suma momentelor de inerþie a mecanismelor bielã-manivelã componente, reduse la axa de rotaþie a arborelui cotit. Rescriind ecuaþia de miºcare sub forma:
0JMM
dtd rez−
=ω Σ , (15)
putem observa cã atenuarea variaþiei vitezei unghiulare a arborelui cotit se poate face prin micºorarea diferenþei rezMM −Σ , adicã prin reducerea gradului de neuniformitate a momentului motor
ΣδM , metoda prezentatã în paragraful
anterior, sau prin mãrirea momentului de inerþie mecanic J0. Aceasta se realizeazã prin montarea pe arbore a unui volant având un moment de inerþie corespunzãtor Jv, Jv =(0.8÷0.9) Jt, unde momentul de inerþie mecanic total Jt=J0+Jv≈Jv. Volantul joacã un rol de acumulator de energie, înmagazinând, în condiþii de variaþie limitatã a vitezei de rotaþie, excedentul de energie mecanicã produsã de motor ºi cedând acest surplus atunci când motorul este deficitar în raport cu consumatorul, sub aspectul energiei mecanice solicitate de acesta.
2.9.1. Metoda aproximativã
Vom ilustra expunerea cu exemplificarea funcþionãrii motorului naval RTA58 cu i=4 cilindri în linie, prin aceasta nepierzându-se valoarea de generalitate. Se constatã cã, în intervalul unghiular ( BA α÷α )oRAC (fig. 6), momentul motor este mai mare decât cel rezistent, deci surplusul de energie
Fig. 5
C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
49
furnizat de motor este înmagazinat prin creºterea energiei cinetice; corespunzãtor viteza unghiularã creºte de la minω la maxω . În punctul B, momentul rezultant va fi egal cu cel rezistent:
ΣΣ == MMM rez , iar 0/ =ω dtd , viteza unghiularã
luând valoarea maxω=ω ; corespunzãtor creºterii
vitezei unghiulare în intervalul ( BA α÷α )o, adicã surplusul de energie, aria AAB este pozitivã. Apoi, pe intervalul ( CB α÷α )o sistemul cedeazã din energia cineticã reclamatã de consumator, viteza unghiularã va scãdea pânã la minω . Intervalul
( CA α÷α )o are lungimea egalã:
δ====α−αΣ i
Ti
TT cM
MAC , (16)
dupã care fenomenele se repetã. Deoarece:
αω
=αω
ω=α
αω
=ω
=εd
ddd
dtd
dd
dtd 2
21
. (17)
ecuaþia (15) devine:
( ) 2
21
ω=α−Σ dJdMM vrez , (18)
care, integratã între limitele Aα , Bα , dã:
( ) ( )
2minmaxminmax
2min
2max
2
2
21
21 max
min
ωδ=ω+ω
ωωω−ω
=
=ω−ω=ω⋅=α−
ω
α
α
ω
ω
Σ∫ ∫
vv
vvrez
JJ
JdJdMMB
A
(19) Þinând cont cã:
( )∫α
α
Σ =α−B
A
ABrez AdMM , (20)
vom obþine:
2ωδ= ωvAB JA , (21) relaþie care reprezintã ecuaþia de dimensionare a volantului, aria AAB obþinându-se prin planimetrare, considerând pozitive ariile situate deasupra valorii medii a momentului ºi negative cele situate sub aceastã linie. Metoda prezentatã implicã apariþia unor erori, datorate faptului cã nu s-a þinut seamã de variaþia cu unghiul de rotaþie a energiei cinetice a maselor în miºcare alternativã, admiþându-se o masã redusã medie constantã.
C C C C C C
C 8 C
C 1C 1C 1C 1C 1C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 50
2.9.2. Metoda exactã Metoda este grafo-analiticã ºi constã în determinarea momentului de inerþie al volantului cu luarea în considerare a variaþiei energiei cinetice a pieselor mecanismului motor ºi prin construcþia diagramei energie-moment de inerþie al acestora. Etape în aceasta sunt: • Determinarea momentului de inerþie al maselor în miºcare, redus la axa de rotaþie. Momentul total de inerþie este:
vt JJJ += 0 , (1) unde momentul de inerþie J 0 are expresia:
( ) ∑+++= ′ cgflarbm JJJJiJ ,0 0, (2)
în care rbJ este momentul de inerþie al masei bielei raportate la maneton (în miºcare de rotaþie):
2RmJ rbrb = , (3) cu rbm este masa bielei aflatã în miºcare de rotaþie
(paragraf 2.3), aJ este momentul de inerþie al maselor în miºcare alternativã, redus ca moment de inerþie în raport cu axa de rotaþie, iar ∑ cgflJ ,
este suma momentelor de inerþie ale flanºelor de cuplare dintre diversele tronsoane ale arborelui cotit, ale contragreutãþilor, etc. Pentru
0mJ ′ ,
momentul de inerþie mecanic al cotului redus la axa de rotaþie, avem:
0002 blmm JJJJ ′′ ++= , (4)
unde momentul de inerþie al manetonului, redus la axa de rotaþie, este:
20
RmJJ mmm += , (5)
cu lm JJ , -mometele de inerþie mecanice propriu-
zise ale manetonului, respectiv palierului, iar 0bJ ′
este momentul braþului raportat la axa de rotaþie, determinat prin relaþii analitice de calcul sau prin discretizarea formei braþului în tronsoane simple. Problema rãmasã neelucidatã este aceea a valorii Ja ; pentru aceasta, se pune condiþia de conservare a energiei cinetice a masei pieselor aflate în miºcare alternativã am :
22
21
21
ω= apa Jwm , (6)
în care, introducând pentru viteza pistonului pw
expresia armonicã din paragraful 1.1:
( )⎥⎥⎦
⎤
⎢⎢⎣
⎡α+αω−= ∑
∞
=121 2sin2sin
kkp kakaRw , (7)
se obþine:
( )
∑∑
∑∞
=
∞
=
∞
=
+=⎟⎟⎠
⎞⎜⎜⎝
⎛α+=
=⎥⎥⎦
⎤
⎢⎢⎣
⎡α+α=
110
2
2
121
2
cos21
2sin2sin
kaa
kka
kkaa
kJJkbbRm
kakaRmJ
, (8)
unde coeficienþii bk ai dezvoltãrii în serie pot fi daþi în funcþie de coeficienþii armonici ai deplasãrii pistonului kaa 21 , . De aici, valoarea medie a momentului de inerþie, ca ºi componenta de ordin armonic k vor fi:
( )
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
α=
≅⎟⎟⎠
⎞⎜⎜⎝
⎛ λ+=
=+≅=
kbRmJ
RmRm
aaRmbRmJ
kaa
aa
aaa
kcos
21
21
41
21
421
21
2
22
2
22
21
20
2
; (9)
ultimele valori subzistã doar pentru valorile k ce satisfac condiþia (a se vedea ºi paragraful 3.3.1):
⎪⎩
⎪⎨⎧
=M4t
M2t
,2
,ip
pik , (10)
valori ce vor fi multiplicate prin numãrul i de cilindri (fig. 1). • Determinarea variaþiei lucrului mecanic dezvoltat într-un ciclu. Variaþia lucrului mecanic în funcþie de unghiul α se determinã rezolvând integrala:
( ) ( ) ( ) ( ) αα=α=α=α ∫∫∫ααα
dMdyFdVpL ppp000
, (11)
cu ( )αpM momentul instantaneu al forþei de
presiune a gazelor pF :
( ) ( ) ( )ββ+α
α=αcos
sinRFM pp . (12)
C 2 C 3 C 4 C 5 C 6 C 7 C 8
C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
51
Impunând un pas de calcul αΔ ºi divizând perioada 0÷Tc într-un numãr αΔ= cTn0 de intervale echidistante, se obþine formula de calcul iterativ:
( ) ( ) ( ) ( )0
11 1,
2nj
MMLL jpjp
jj ÷=αΔα+α
+α=α ++ .
(13) Lucrul mecanic cumulat în intervalul unui ciclu este reprezentat în figura 2,a, în care s-a trasat ºi curba de variaþie a lucrului mecanic monocilindric rezistent (variaþie liniarã, deoarece momentul rezistent este constant); la încheierea ciclului, cele douã valori sunt egale; prin însumare graficã sau analiticã, se pot trasa aceleaºi variaþii ºi pentru motorul policilindric (fig. 2,b); cu Ls s-a notat lucrul mecanic suplimentar (în exces).
• Construirea diagramelor energie-moment de inerþie. Figura 1 indicã modul de trasare al diagramei, care redã ºi modul în care se realizeazã transferul de energie între arborele cotit ºi piesele aflate în miºcare alternativã. Pentru aceasta, se eliminã, grafic sau analitic, parametrul α între funcþiile ( )α=
ΣΣ ss LL ºi ( )α= aa JJ , obþinându-se
diagrama ( )ass JLLΣΣ
= , prin punctele x corespondente. • Determinarea momentului de inerþie al volantului. Presupunând cunoscutã valoarea vJ , din originea sistemului de referinþã din figura 1 se duce secan-ta Ox (x pe diagrama energie-moment de inerþie), obþinându-se unghiul xϕ :
2
20
212
1
tan xx
xx
x
c
x
sx J
J
J
E
J
ELxx ω=
ω==
+=ϕ Σ , (14)
Fig. 1
Fig. 2
C C C C C C C
C 9 C 1C 1C 1C 1C 1C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 52
de unde:
xx ϕ=ω tan2 . (15)
Înlocuind în (14) valorile vitezelor unghiulare maxime ºi minime, corespunzãtoare unghiurilor
maxϕ ºi minϕ pe care le fac tangentele din O la
punctele extreme ale curbei ( )ass JLL Σ=Σ
cu axa
absciselor ºi introducându-le apoi în relaþiile de definiþie ale gradului de neuniformitate al miºcãrii de rotaþie a arborelui cotit, respectiv ale vitezei unghiulare medii (de începutul paragrafului 2.9), se obþin valorile concrete ale acestor unghiuri:
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛ δ−
ω=ϕ
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛ δ+
ω=ϕ
ω
ω
22
min
22
max
21
2arctan
21
2arctan
. (16)
Cunoscând acum aceste unghiuri, se traseazã tangentele la graficul anterior, la intersecþia dintre ele determinându-se originea O a sistemului de referinþã, din care se citeºte, la scarã, momentul de inerþie vJ al volantului. Dupã determinarea, prin una din cele douã metode expuse anterior, a momentului de inerþie al volantului, se poate determina, pe baza schemei de calcul din figura 3, diametrul mediu al volantului. Pentru aceasta, în figura 3 se prezintã schema de calcul pentru masa ºi momentul de inerþie al volantului motorului naval Sulzer RTA58 cu patru cilindri în linie. Cu dimensiunile literale din figura anterioarã, se calculeazã elementul de suprafaþã:
drdrdA ϕ= , (17)
masa elementarã fiind:
ϕρ=ρ= brdrdbdAdm , (18) unde cu ρ s-a notat densitatea materialului volantului. Masa acestuia se obþine prin integrare, cu aplicarea metodei separãrii variabilelor independente:
( ) ,22
2
22
2112
2
0
21
22
2
1
vv
R
R
DbhRbhRR
RRb
RRbrdrdbbrdrddmm
πρ=πρ=+
−πρ=
=−
πρ=ϕρ=ϕρ== ∫ ∫∫ ∫ ∫π
(19) unde cu vR si vD s-au notat raza medie, respectiv diametrul mediu ale coroanei periferice a volantului. Momentul de inerþie al volantului se calculeazã ca mai jos:
.42
222
42
22
22
21
22
21
21
22
41
42
2
0
3222
1
vvvvv
R
Rv
DmRm
RRm
RRRRb
RRb
drrdbbrdrdrdmrJ
=≅+
=
=+
⋅−
πρ=−
πρ=
=ϕρ=ϕρ== ∫∫ ∫ ∫∫π
(20)
Impunând raportul dimensiunilor b ºi h între 0.6÷2.2, ca ºi gradul de neuniformitate ωδ , introducând ºi (20) în ecuaþia de dimensionare a volantului 2ωδ= ωvAB JA , se obþine relaþia de dimensionare a volantului:
22 4
ωδ=
ω
Abvv
ADm , (21)
C 2 C 3 C 4 C 5 C 6 C 7 C 8
C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 Fig. 3

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
53
de unde diametrul mediu al volantului va fi:
34
bhJ
D vv πρ= . (22)
Influenþa mãririi numãrului de cilindri asupra momentului vJ (sau asupra expresiei 2
vv Dm ) ºi
asupra diametrului vD se traduce prin micºorarea acestora, datoritã micºorãrii ariei AAB, conform ecuaþiei de dimensionare anterioare. Aceastã dependenþã este ilustratã în figura 4 pentru motorul pentru care s-au fãcut ºi exemplificãrile anterioare. Pentru gradul de neuniformitate al miºcãrii de rotaþie a arborelui cotit se mai pot lua valori mai precise în gama 1/20÷1/50 pentru motoarele lente de propulsie ºi 1/100÷1/300 pentru motoarele auxiliare.
Fig. 4
C C C C C C C
C 9 C 1C 1C 1C 1C 1C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 54
02.10. Ordinea de aprindere Într-o perioadã a ciclului cT ‚ în cazul motorului policilindric, în fiecare cilindru se produce o aprindere. Pentru o funcþionare uniformã a motorului, aºa cum s-a arãtat în paragraful 2.8, aprinderile sunt decalate uniform în interiorul unei perioade a ciclului, decalajul unghiular fiind stabilit de relaþia:
iiTc // τπ==δ , cu τ -numãrul de timpi de realizare a ciclului motor. Condiþia uniformitãþii aprinderilor stabileºte distribuþia manivelelor în jurul axei de rotaþie a arborelui cotit, ca ºi ordinea în care se declanºeazã aprinderile în cilindrii motorului, numitã ordine de aprindere.
2.10.1. Steaua manivelelor ºi ordinea de aprindere la motoarele în linie
Prin proiecþia manivelelor pe un plan perpendicular pe axa de rotaþie a arborelui cotit se obþine distribuþia manivelelor în jurul acesteia, configuraþia respectivã purtând denumirea de stea a manivelelor (fig. 1). Se considerã manivela 1‚ la p.m.i.‚ când se declanºeazã aprinderea; convenþional operaþia începe cu cilindrul 1. Deoarece mecanismele motoare au aceeaºi cinematicã ºi acelaºi reglaj al aprinderii, fiecare manivelã se va afla la p.m.i. când se produce aprinderea în cilindrul respectiv. Deci unghiul dintre manivelele a doi cilindri în care aprinderile sunt consecutive este egal cu δ. Vom considera cilindrii în ordinea aprinderilor ºi atribuim fiecãrei manivele numãrul de ordine al cilindrului pe care îl deserveºte: ipjj ,...,,...,,...,2,1 + ,
unde ij ,1= ºi
( )⎩⎨⎧
−=+=
=12ă,2/1
2ă,2/pii
piip
dac
dac, (1)
cu 1>∈ pp N, . Vom considera manivelele j ºi
pj + , separate prin p aprinderi. Rezultã unghiul dintre cele douã manivele:
( )
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
∈π≠τπ⋅
+=
=τπ⋅
+⎩⎨⎧ππ
=τπ
=τπ⋅
=τπ
=δ=+∠
N,2
12
1,,2
22
,
mmi
ii
ii
i
ippjpj
M2t
M4t
.(2)
Aºadar, pentru motoarele în linie cu aprinderi uniform repartizate ºi numãr par de cilindri, manivelele arborelui cotit sunt douã câte douã în fazã la motoarele în patru timpi ºi douã câte douã în opoziþie de fazã la motoarele în doi timpi. Deoarece ( ) 11 =+ii, (douã numere naturale
consecutive sunt prime) ºi raportul ( ) mii ≠+ /1 (nu poate fi numãr întreg), rezultã cã la motoarele cu numãr impar de cilindri manivelele au direcþii distincte, uniform distribuite în jurul axei de rotaþie, raþia progresiei aritmetice unghiulare fiind i/π2 , atât la motorul în doi timpi, cât ºi la cel în patru timpi. La alcãtuirea schemei arborelui cotit se precizeazã atât dispunerea coturilor în lungul arborelui cotit, cât ºi în jurul axei de rotaþie. Dacã a doua condiþie este datã de steaua manivelelor, prima se triazã din condiþii de echilibrare. Numerotarea cilindrilor motoarelor navale în linie se face dinspre cuplaj (fig. 2), conform normelor DIN 6265; ISO 1205-1972; ISO 2276-1972 ca ºi normelor de calitate ale fiecãrei firme constructoare navale (ex. Q10.09221-1050, firma MAN B&W). Din cele prezentate anterior, se poate deduce cã, deºi steaua manivelelor unui arbore cotit, privitã ca o figurã indeformabilã, rotitoare cu viteza unghiularã ω, este unicã, distribuþia manivelelor în lungul axei de rotaþie prezintã un numãr de soluþii dinamic distincte, dat de:
Fig. 1
C 2
C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
55
( )!121
0 −=ν i . (3)
În determinarea lui 0ν , s-a þinut cont cã ( )1−i reprezintã numãrul de direcþii rãmase libere dupã fixarea unei manivele pe o direcþie din stea; coeficientul 21 / þine seama de faptul cã soluþiile astfel obþinute diferã între ele numai prin sensul de rotaþie al arborelui cotit, douã câte douã, fiind echivalente din punct de vedere dinamic. Din mulþimea celor 0ν posibilitãþi de alcãtuire a schemei arborelui cotit, vom prefera, din motive de echilibrare, soluþiile care prezintã o anumitã simetrie. Astfel, la motoarele cu numãr par de cilindri, vom defini planul central de simetrie al arborelui cotit ca fiind acel plan normal pe axa de rotaþie în mijlocul arborelui cotit, faþã de care manivelele în fazã ale motorului în patru timpi sau cele în opoziþie ale motorului în doi timpi sunt dispuse la egalã distanþã. În acest fel, numãrul soluþiilor distincte se reduce la:
!⎟⎠
⎞⎜⎝
⎛ −=ν 122
1 i (4)
Pentru fiecare dintre aceste soluþii de arbore cotit cu plan central de simetrie, la motorul în patru timpi apare multiplicarea posibilitãþilor de aprindere în timpul primei rotaþii, deoarece ajung la p.m.i.
grupe de manivele în fazã în numãr de ⎟⎠
⎞⎜⎝
⎛ −12i
, de
fiecare datã fiind posibile câte douã variante de ordine de aprindere, numãrul total al acestora, în cadrul aceleiaºi scheme de arbore cotit, fiind:
122−
=μi
. (5)
Deci numãrul total al posibilitãþilor de aprindere, la motoarele în patru timpi cu numãr par de cilindri, va fi:
μν=N . (6) La motoarele în doi timpi, în cadrul fiecãrei
configuraþii din cele posibile, cele ⎟⎠
⎞⎜⎝
⎛ −12i
perechi
de manivele în opoziþie rãmase libere dupã fixarea primei perechi îºi pot schimba reciproc poziþia în
stea, determinând, la rândul lor ⎟⎟⎠
⎞⎜⎜⎝
⎛−1
22i
variante posibile. Aºadar, numãrul de posibilitãþi de realizare a arborilor cu plan central de simetrie va fi tot cel dat de relaþia (6). Odatã fixatã însã soluþia de arbore cotit, ordinea de aprindere este univoc determinatã. La motoarele cu numãr impar de cilindri nu existã posibilitãþi de reducere a numãrului iniþial 0ν de posibilitãþi, atât pentru motorul în patru timpi. cât ºi pentru cel în doi timpi. Tot din considerente de echilibrare, de multe ori, se ordoneazã aprinderile începând cu cilindrul 1 ºi continuând cu cilindrii cu numãr impar, în ordinea crescãtoare, apoi cilindrii cu numãr par, în ordine descrescãtoare. Soluþia prezintã simetrie în raport cu manivela medianã, manivelele simetrice faþã de aceasta fiind egal depãrtate de mijlocul arborelui cotit. Selecþionarea, în continuare, a ordinii de aprindere, din mulþimea N‚ pentru motoarele cu numãr par de cilindri, sau 0ν pentru motoarele cu numãr impar de cilindri, se face pe baza unor criterii, cum ar fi: încãrcarea minimã a lagãrelor arborelui cotit, reducerea solicitãrilor la vibraþii torsionale, reducerea solicitãrilor sub acþiunea momentului de rãsturnare, mãrirea gradului de umplere cu încãrcãtura proaspãtã a cilindrilor motorului, etc. Criteriul de bazã, în prima etapa de studiu se considerã a fi primul, deoarece asigurã o durabilitate sporitã a motorului. O încãrcare mai redusã a lagãrelor arborelui cotit se obþine dacã aprinderile succesive nu au loc în cilindri alãturaþi, aceasta obþinându-se prin minimalizarea numãrului σ care reprezintã numãrul de aprinderi succesive în vecinãtatea aceluiaºi lagãr palier. Vom exemplifica consideraþiile teoretice anterioare cu stabilirea ordinii de aprindere pentru un motor în patru timpi cu 12 cilindri în linie, motorul fiind normal axat ºi cu aprinderi uniform repartizate.
Decalajul unghiular δ va fi egal cu °=° 60
12720
;
numãrul de posibilitãþi de realizare a arborelui cotit cu plan central de simetrie este
6012
1221
=⎟⎠
⎞⎜⎝
⎛ −⎟⎠
⎞⎜⎝
⎛=ν ! , iar numãrul de posibilitãþi de
Fig. 2
C C C C C C C C C
C 10 C 1C 1C 1C 1C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 56
ordine de aprindere este: 3221
212
==μ−
. În figura 3 se ilustreazã una dintre cele 60 de scheme de arbore cotit, iar în continuare se dau cele 32 de variante de ordine de aprindere. 1-6-2-4-3-5-12-7-11-9-10-8-1 σ = 2; 1-6-2-4-3-8-12-7-11-9-10-5-1 σ = 2; 1-6-2-4-10-5-12-7-11-9-3-8-1 σ = 0; 1-6-2-4-10-8-12-7-11-9-3-5-1 σ = 0; 1-6-2-9-3-5-12-7-11-4-10-8-1 σ = 0; 1-6-2-9-3-8-12-7-11-4-10-5-1 σ = 0; 1-6-2-9-10-5-12-7-11-4-3-8-1 σ = 2; 1-6-2-9-10-8-12-7-11-4-3-5-1 σ = 2; 1-6-11-4-3-5-12-·-2-9-10-8-1 σ = 2; 1-6-11-4-3-8-12-7-2-9-10-5-1 σ = 2; 1-6-11-4-10-5-12-7-2-9-3-8-1 σ = 0; 1-6-11-4-10-8-12-7-2-9-3-5-1 σ = 0; 1-6-11-9-3-5-12-7-2-4-10-8-1 σ = 0; 1-6-11-9-3-8-12-7-2-4-10-5-1 σ = 0; 1-6-11-9-10-8-12-7-2-4-3-5-1 σ = 2; 1-6-11-9-10-5-12-7-2-4-3-8-1 σ = 2; 1-7-2-4-3-5-12-6-11-9-10-8-1 σ = 2; 1-7-2-4-3-8-12-6-11-9-10-5-1 σ = 2; 1-7-2-4-10-5-12-6-11-9-3-8-1 σ = 0; 1-7-2-4-10-8-12-6-11-9-3-5-1 σ = 0; 1-7-2-9-3-5-12-6-11-4-10-8-1 σ = 0; 1-7-2-9-3-8-12-6-11-4-10-5-1 σ = 0; 1-7-2-9-10-5-12-6-11-4-3-8-1 σ = 2; 1-7-2-9-10-8-12-6-11-4-3-5-1 σ =2; 1-7-11-4-3-5-12-6-2-9-10-8-1 σ = 2; 1-7-11-4-3-8-12-6-2-9-10-5-1 σ = 2 1-7-11-4-10-5-12-6-2-9-3-8-1 σ = 0; 1-7-11-4-10-8-12-6-2-9-3-5-1 σ = 0; 1-7-11-9-3-5-12-6-2-4-10-8-1 σ = 0; 1-7-11-9-3-8-12-6-2-4-10-5-1 σ = 0; 1-7-11-9-10-5-12-6-2-4-3-8-1 σ = 2; 1-7-11-9-10-8-12-6-2-4-3-5-1 σ = 2. În stabilirea variantelor anterioare, s-a þinut cont de multiplicarea posibilitãþilor de ordine de aprindere în intervalul primei relaþii. Odatã stabilitã ordinea de aprindere în acest interval, apare implicit succesiunea aprinderilor în decursul celei de-a doua rotaþii a arborelui cotit. Aºadar, se constatã
cã, în cadrul unei singure scheme de arbore cotit din cele 60 posibile, existã mai multe soluþii care satisfac criteriul 0=σ ; dintre acestea se alege cea care realizeazã o echilibrare mai bunã, aceasta fiind o etapã interioarã de studiu care se va aborda în paragraful urmãtor. Deoarece numãrul de cilindri, la motoarele navale în linie, variazã între 2 ºi 12, vom prezenta, în tabelul 1, soluþii de arbori cotiþi cu plan central de simetrie ºi de ordin de aprindere pi 2= , iar în tabelul 2 pentru motoarele în doi ºi patru timpi. Atunci când numãrul soluþiilor posibile este foarte mare, s-a prezentat câte o soluþie triatã pe baza unui criteriu suplimentar specificat. Motoarele navale cu numãr mare de cilindri ( )8≥i folosesc ºi soluþii de arbore cotit care se supun altor criterii: simetrii parþiale, care duc la o echilibrare eficientã sau aprinderi neuniform repartizate.
2.10.2. Steaua manivelelor ºi ordinea de aprindere la motoarele în V
Atunci când numãrul cilindrilor motorului este mare ºi se utilizeazã un singur arbore cotit, pentru evitarea mãririi gabaritului motorului, se pot dispune cilindrii în douã linii, planele generate de axele cilindrilor fiind concurente; dreapta de concurenþã coincide, în cazul motorului normal axat, cu axa de rotaþie, în caz contrar fiind o dreaptã paralelã cu aceasta. Unghiul diedru format de cele douã plane reprezintã unghiul V-ului ºi se noteazã cu γ, prin analogie cu unghiul dintre axele cilindrului principal ºi secundar din cadrul mecanismului motor cu bielã principalã ºi bielã secundarã. De altfel, motoarele cu cilindrii dispuºi în V‚ utilizeazã, uneori, mecanisme de acest tip, atunci când nu se doreºte mãrirea lungimii motorului, prin lungimea mãritã a manetoanelor pe care se articuleazã bielele ce lucreazã în doi cilindri, opuºi, în cazul articulãrii ob-
C 2
C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56
Fig. 3

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
57
Nr. crt. τ i ν μ N δ Steaua
manivelelor
Ordinea de
aprindere σ
Criteriu suplimen-
tar de triere a soluþiei
0 1 2 3 4 5 6 7 8 9 10
1 2 1 1 1 360°
1-2-1 -
2 4 1 2 2 180°
1-2-4-3-1 1-3-4-2-1
2 2
- -
3 6 1 4 4 120°
1-2-3-6-5-4-1 1-2-4-6-5-3-1 1-5-3-6-2-4-1 1-5-4-6-2-3-1
4 2 0 2
- - - -
4 8 3 8 24 90°
1-4-2-3-8-5-7-6-1 1-4-2-6-8-3-7-5-1 1-4-7-3-8-5-2-6-1 1-4-7-6-8-5-2-3-1 1-5-2-3-8-4-7-6-1 1-5-2-6-8-4-7-3-1 1-5-7-3-8-4-2-6-1 1-5-7-6-8-4-2-3-1
2 0 0 2 2 0 0 2
momente inerte mici
5 10 12 16 192 72°
1-4-3-2-5-10-7-6-9-8-1 1-4-3-2-6-10-7-8-9-5-1 1-4-3-9-5-10-7-8-2-6-1 1-4-3-9-6-10-7-8-2-5-1 1-4-8-2-5-10-7-3-9-6-1 1-4-8-2-6-10-7-3-9-5-1 1-4-8-9-5-10-7-3-2-6-1 1-4-8-9-6-10-7-3-9-5-1 1-7-3-2-5-10-4-8-9-6-1 1-7-3-2-6-10-4-8-9-5-1 1-7-3-9-5-10-4-8-2-6-1 1-7-3-9-6-10-4-8-2-5-1 1-7-8-2-5-10-4-3-9-6-1 1-7-8-2-6-10-4-3-9-5-1 1-7-8-9-5-10-4-3-2-6-1 1-7-8-9-6-10-4-3-2-5-1
4 4 2 2 0 0 2 1 2 2 0 0 2 2 4 4
favorabil vibraþiilor torsionale
6
4
12 60 32 1920 60° 1-6-11-4-10-5- -12-7-2-9-3-8-1 0
echilibraj foarte bun al
forþelor ºi
momen-telor
forþelor de inerþie
7 2 1 1 1 180°
1-2-1 2 -
8 4 1 1 1 90°
1-3-4-2-1 2 -
9
2
6 1 4 4 60° 1-5-3-6-2-4-1 0 -
Tabelul 1
C C C C C C C C C
C 10 C 1C 1C 1C 1C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5
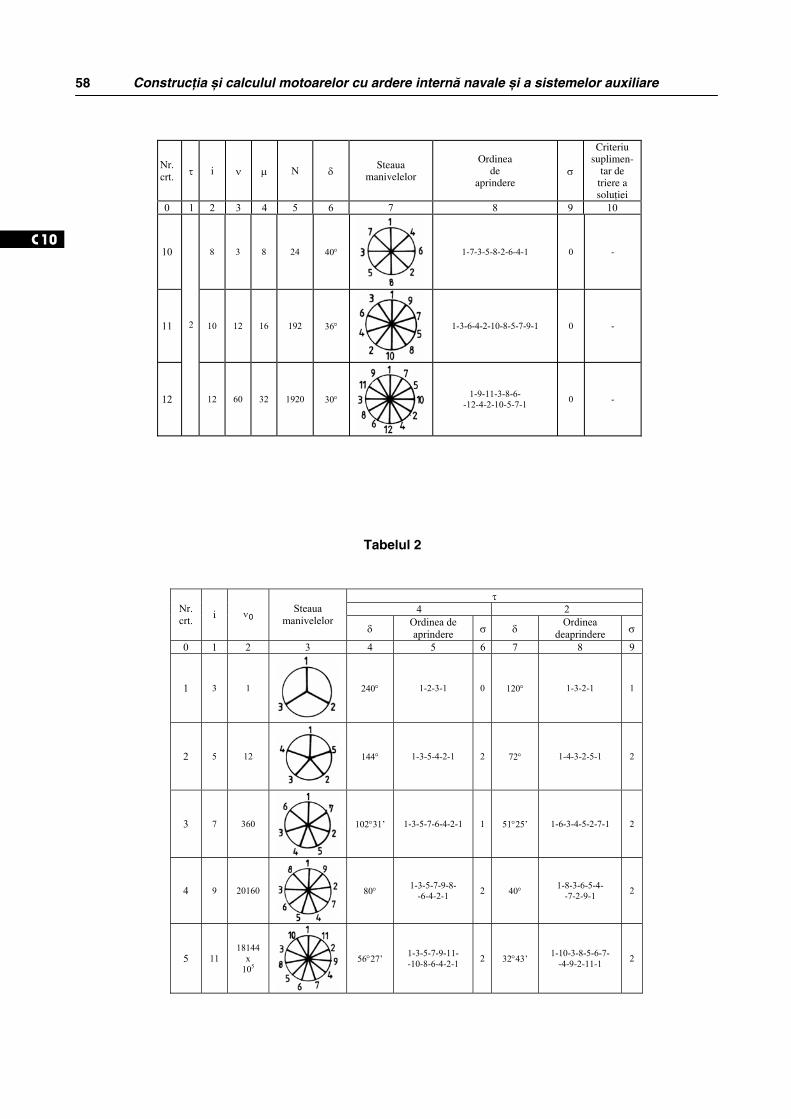
Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 58
Nr. crt. τ i ν μ N δ Steaua
manivelelor
Ordinea de
aprindere σ
Criteriu suplimen-
tar de triere a soluþiei
0 1 2 3 4 5 6 7 8 9 10
10 8 3 8 24 40°
1-7-3-5-8-2-6-4-1 0 -
11 10 12 16 192 36°
1-3-6-4-2-10-8-5-7-9-1 0 -
12
2
12 60 32 1920 30° 1-9-11-3-8-6- -12-4-2-10-5-7-1 0 -
τ
4 2 Nr. crt. i 0ν Steaua
manivelelor δ Ordinea de
aprindere σ δ Ordinea deaprindere σ
0 1 2 3 4 5 6 7 8 9
1 3 1
240° 1-2-3-1 0 120° 1-3-2-1 1
2 5 12
144° 1-3-5-4-2-1 2 72° 1-4-3-2-5-1 2
3 7 360
102°31’ 1-3-5-7-6-4-2-1 1 51°25’ 1-6-3-4-5-2-7-1 2
4 9 20160
80° 1-3-5-7-9-8- -6-4-2-1 2 40° 1-8-3-6-5-4-
-7-2-9-1 2
5 11 18144
x 105
56°27’ 1-3-5-7-9-11- -10-8-6-4-2-1 2 32°43’ 1-10-3-8-5-6-7-
-4-9-2-11-1 2
Tabelul 2
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
59
þinute prin alãturare sau interferare (sistem cu bielã furcã). Uzual, motoarele navale folosesc soluþia bielelor alãturate. Condiþia de uniformitate a aprinderilor impune ºi determinarea mãrimii unghiului γ. În perioada unui ciclu, aprinderile trebuie sã se producã succesiv în cele douã linii (de fapt, pentru a evita solicitarea lagãrelor alãturate). Considerând motorul în patru timpi, la trecerea dintr-o linie în cealaltã, unghiul dintre douã linii trebuie sã fie egal cu unghiul dintre
douã aprinderi succesive: ii
Tc π==δ=γ
4.
Valabilitatea condiþiei uniformitãþii aprinderilor se menþine ºi în cazul: δ⋅=γ m , N∈m , cu condiþia suplimentarã cã, în general la motoarele navale în V, π<δm .
Vom avea cotiiiπ
=π
=π
=δ=γ2
2
24, unde cu coti s-
a notat numãrul de coturi, pe fiecare dintre acestea lucrând câte douã biele. Ultima egalitate reprezintã condiþia uniformitãþii aprinderilor pentru un motor în doi timpi cu 2/i ‚ cilindri (sau echivalent, cu
cotii =2/ ‚ distribuite uniform în jurul axei de rotaþie). Aºadar, arborele cotit al unui motor în patru timpi cu cilindrii în V poate fi asimilat cu cel al unui motor în patru timpi în linie, cu manivelele în fazã douã câte douã (valabil numai pentru i multiplu de 4) ºi cu plan central de simetrie, sau cu al unui motor în doi timpi cu cilindrii în linie, cu plan central de simetrie pentru manivelele în opoziþie de fazã (tot pentru i multiplu de 4). Pentru cazul i diferit de multiplu de 4 (dar, evident, multiplu de 2) conduce la asimilarea arborelui cotit cu cel al unui motor cu numãr impar de cilindri în linie.
Ordinea de aprindere se stabileºte ca ºi pentru motoarele cu cilindrii în linie. Numerotarea cilindrilor se face conform normelor amintite în paragraful anterior. În figura 4 se exemplificã motorul cu 6 cilindri în V. S-au numerotat cilindrii din stânga cu cifrele 1-2-3 ºi cei din dreapta cu 4-5-6. Se obþin douã puncte moarte interioare: p.m.i.s, pentru linia din stânga ºi p.m.i.d‚ pentru linia din dreapta. Se considerã manivela 1 la p.m.i.s ºi se declanºeazã aprinderea; se roteºte arborele cotit
cu unghiul °=°
=γ=δ 1206
720 în sensul indicat.
La p.m.i. sosesc manivelele 4 ºi 2 (4 în p.m.i.d deoarece face parte din linia din dreapta, iar 2 în p.m.i.s deoarece face parte din linia din stânga). Deºi manivela cilindrului 5 ajunge la p.m.i.s, nefãcând parte din linia stângã, nu se poate produce aprindere în cilindrul respectiv decât în linia dreaptã. Vom reþine ambele posibilitãþi (4 ºi 2). Rotind arborele cotit cu încã 120°, ajung la aprindere manivelele 5 ºi 3; reþinem din nou ambele soluþii. Numãrul total de posibilitãþi de aprindere va fi:
422 212 ===μ−
i
. Trierea soluþiilor se face pe baza urmãtoarelor criterii: încãrcarea uniformã a lagãrelor (exprimatã prin numãrul minσ de aprinderi consecutive pe acelaºi maneton) ºi distribuþie uniformã a încãrcãrii termice a liniilor de cilindri (exprimatã prin numãrul
minq de aprinderi consecutive în aceeaºi linie). Variantele de ordine de aprindere sunt date mai jos:
Fig. 4
C C C C C C C C C
C 10 C 1C 1C 1C 1C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 60
1-4-5-6-2-3-1 σ = 1 q = 3; 1-4-3-6-2-5-1 σ = 3 q = 0; 1-2-5-6-4-3-1 σ = 1 q = 2; 1-2-3-6-4-5-1 σ = 1 q = 3. Soluþia întâi ºi a treia corespund, cel mai bine, criteriilor enunþate. Prezentãm mai jos ºi cazul mai complex al motorului în patru timpi cu opt cilindri în V, ilustrat prin figura 5. Soluþiile posibile de ordine de aprindere sunt în numãr de 822 314 ==− ºi ele sunt prezentate mai jos împreunã cu criteriile de selecþie menþionate anterior: 1-5-7-8-6-3-4-2-1 σ = 1 q = 3; 1-5-7-2-6-3-4-8-1 σ = 3 q = 1; 1-5-4-8-6-3-7-2-1 σ = 3 q = 1; 1-5-4-2-6-3-7-8-1 σ = 3 q = 1; 1-3-7-8-6-5-4-2-1 σ = 1 q = 3; 1-3-7-2-6-5-4-8-1 σ = 3 q = 1; 1-3-4-8-6-5-7-2-1 σ = 1 q = 3; 1-3-4-2-6-5-7-8-1 σ = 1 q = 3. Se preferã soluþiile cu 3=σ , 1=q ; din cele
patru variante care au aceeaºi indici ( )q,σ , se triazã soluþiile care satisfac criterii suplimentare de echilibrare.
Fig. 5
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
61
3. Echilibrarea motoarelor navale Un motor cu ardere internã este echilibrat atunci când reacþiunile din reazemele sale sunt constante ca mãrime, direcþie ºi sens. Deoarece aceastã condiþie nu poate fi îndeplinitã de un motor termic, vom examina mai întâi cauzele care dezechilibreazã motorul.
3.1.Cauzele dezechilibrãrii motoarelor navale Pentru a analiza contribuþia asupra reacþiunilor din reazeme a fiecãrei categorii de forþe ce acþioneazã în mecanismul motor, vom cerceta dezechilibrul produs de fiecare dintre acestea. Astfel, forþa de presiune a gazelor pF se
descompune în componentele pB ‚ în lungul axei
bielei ºi pN ‚ normala pe peretele cilindrului.
Plasând în centrul de rotaþie O douã forþe egale ºi de sens contrar, pB′ ºi pB ′′ (fig. 1,a), cu suportul
paralel cu pB ‚ sistemul de forþe nu se modificã. La
rândul sãu, forþa pB ′′ se descompune în
componentele pF ′′ ºi pN ′′ . Forþele pF ′ ºi pF ′′ sunt
aplicate chiulasei, respectiv lagãrului palier ºi, fiind egale ºi de sens contrar, se anuleazã, nesolicitând lagãrele, ci numai structura de rezistenþã a motorului (solicitarea de întindere). Deci forþa de presiune a gazelor pF ‚ nu produce
un dezechilibru, în cazul mecanismului normal axat
prezentat. În cazul mecanismului dezaxat, forþa pF
produce un moment de rãsturnare, proporþional cu mãrimea dezaxãrii). În schimb, cuplul de forþe pN , pN ′′ produce un
moment de rãsturnare, dat de relaþia:
OPNM prasp⋅= (1)
ºi care dã reacþiuni variabile (N este funcþie de unghiul de manivelã α) ºi tinde sã basculeze motorul într-un plan perpendicular pe axa de rotaþie. În ceea ce priveºte cuplul pB ‚ pB′ , acesta
acþioneazã asupra arborelui cotit, reprezentând contribuþia forþei de presiune a gazelor la momentul activ total:
MQBM pp ⋅= . (2)
În mod asemãnãtor, se analizeazã contribuþia forþei de inerþie a maselor în miºcare alternativã,
aF ‚ ilustratã în figura 1, b. Cuplul aN ‚ aN ′′ ‚ genereazã un moment de rãsturnare:
OPNM arasa⋅= , (3)
iar cuplul aB ‚ aB′ ‚ un moment:
MQBM aa ⋅= (4) care reprezintã contribuþia forþei de inerþie a
Fig. 1
C C C C C C C C C
C 10 C 11
C 1C 1C 1C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5
p

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 62
maselor în miºcare de translaþie la momentul motor total. Forþa aF ′′ egalã ºi de acelaºi sens cu aF ‚ fiind variabilã, produce dezechilibrul motorului care va trepida în plan vertical. Aºadar, momentul total de rãsturnare rasM ‚
definit în paragraful 2.8, se compune din prasM ºi
arasM ‚ iar momentul motor total M din aM ºi pM :
ap rasrasras MMM += (5)
ºi:
ap MMM += . (6)
Pentru fiecare din componente avem egalitãþile:
araspras MMMMap== ; , (7)
dar, pe ansamblu, motorul considerat monocilindric este neechilibrat, componentele care produc momentele parþiale acþionând asupra unor organe diferite ale motorului. În ceea ce priveºte forþa de inerþie a maselor în miºcare de rotaþie rF ‚ deºi constantã ca mãrime, este variabilã ca direcþie ºi sens, transmiþându-se deci reazemelor motorului ºi producând trepidaþia motorului. În cazul motorului policilindric, apar momente de dezechilibru suplimentare, datorate faptului cã forþele de dezechilibru acþioneazã în plane diferite. Schema forþelor ºi momentelor pentru motorul policilindric în linie este ilustratã în figura 2. Motorul considerat este normal axat, cu cilindrii identici ºi echidistanþi, adicã:
.1 constaaa jj ==− + , 1,1 −= ij (8)
unde ja ‚ reprezintã distanþa de la cilindrul de
ordinul j, normal pe axa de rotaþie a arborelui cotit, la originea sistemului de referinþã Oxyz, în care Oz coincide cu axa de rotaþie, Oy este paralelã cu axele cilindrilor, iar Ox este perpendicularã pe axa de rotaþie. S-au considerat mecanismele motoare a doi cilindri alãturaþi j ºi 1+j . Forþele de inerþie ale maselor în miºcare de rotaþie, aferente fiecãrui cilindru, rjF ‚ se
descompun în componentele:
jrjrj
jrjrj
FY
FX
α=
α=
cos
sin, ij ,1= , (9)
unde rjF are expresia dedusã la paragraful 2.5:
ijconstRmF rrj ,1,2 ==ω−= , (10)
conform observaþiei anterioare. Forþele de inerþie ale maselor în miºcare de translaþie ajF ‚ se deduc tot din 2.5 ºi au expresia:
ijamF pjaaj ,1, =−= , (11)
în care acceleraþia pistonului j, pja ‚ are forma:
( ) ,2cos2cos1
22
12
⎥⎥⎦
⎤
⎢⎢⎣
⎡α+αω−= ∑
∞
=kjkjpj kakaRa (12)
coeficienþii 1a , ka2 fiind daþi la 1.1.2.
Forþa ajF se proiecteazã în sistemul Oxyz ºi dã
componentele:
ijFYX ajajaj ,1,;0 === . (13)
Menþionãm cã s-a presupus cã masele am ºi
rm sunt identice pentru toate mecanismele,
Fig. 2
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
63
acestea fiind considerate identice. Se face reducerea forþelor în planul xOy printr-o rezultantã care are componentele:
( )
( ),
,
1
1
∑
∑
=
=
+=
+=
i
jajrj
i
jajrj
YYY
XXX
(14)
ca ºi prin douã momente:
( )∑ ∑∑= ==
+=+=+=i
jaxrx
i
jjaj
i
jjrjjajrjx MMaYaYaYYM
1 11
,
(15) în jurul axei Ox, numit moment de galop, care face ca motorul sã trepideze în planul yOz‚ ºi are douã componente: rxM —momentul de galop al forþelor de
inerþie ale maselor în miºcare de rotaþie ºi axM -momentul de galop al forþelor de inerþie ale maselor în miºcare alternativã, ca ºi momentul:
ry
i
jjrjy MaXM ∑
=
==1
, (16)
numit moment de ºerpuire, care genereazã trepidaþia motorului în planul xOz ºi are, deci, numai componentã efectivã de ºerpuire a forþelor de inerþie ale maselor în miºcare de rotaþie. Totodatã, persistã momentele de rãsturnare ce acþioneazã în planul fiecãrui mecanism motor; prin însumare, aceste momente dau un moment în planul xOy numit moment de ruliu:
( )∑∑==
+==i
jrasras
i
jrasz pjajj
MMMM11
, (17)
compus, ºi el, din momentul de ruliu al forþelor de inerþie ale maselor în miºcare alternativã ºi cel al forþelor de presiune a gazelor, conform relaþiei (5); reamintim cã s-a notat cu i numãrul total de cilindri. Se poate constata, din formulele (14) ºi (17) cã rezultanta forþelor de inerþie ºi momentul de ruliu nu depind de distanþele dintre cilindri. În schimb, momentele de galop ºi de ºerpuire depind în mod explicit de aceste distanþe. De aceea, se poate studia echilibrarea motoarelor pe douã categorii de solicitãri: forþele de inerþie ºi momentele de ruliu, respectiv cea de a doua categorie: momentele forþelor de inerþie (de ºerpuire ºi galop). Aceste momente care produc dezechilibrul motorului se numesc momente externe, deoarece acþioneazã asupra reazemelor. În schimb,
momentul cuplului de forþe care încarcã fusurile de reazem se numesc momente interne. În acest sens, vom menþiona cã echilibrarea constã în anularea completã a tuturor forþelor ºi momentelor variabile care acþioneazã asupra reazemelor. Existã douã posibilitãþi de echilibrare: folosirea unor mase de echilibrare (contragreutãþi) ale cãror forþe de inerþie anuleazã forþele de inerþie ale maselor în miºcare ºi momentele lor, sau alegerea soluþiei optime de arbore cotit, cu posibilitãþile anulãrii reciproce a forþelor ºi momentelor de inerþie. În general se recurge la o soluþie intermediarã între cele douã posibile.
3.2. Echilibrarea motorului monocilindric Cu observaþiile fãcute în paragraful anterior, dezechilibrul motorului monocilindric normal axat este produs de forþele rF ºi aF ca ºi
momentele de rãsturnare rasM , cu componentele
prasM ºi arasM ; vom analiza pe rând echilibrarea
acestora. 3.2.1. Echilibrarea forþei de inerþie a maselor în
miºcare de rotaþie Relaþia forþei de inerþie a maselor în miºcare de rotaþie este datã în 2.5; aceastã forþã se echilibreazã prin amplasarea a douã contragreutãþi de mase erm în prelungirea braþelor cotului (fig. 1). Vom considera cã cele douã contragreutãþi de mase egale vor dezvolta o forþã de inerþie care sã echilibreze rF :
rerer Fm =ωρ 22 (18)
În relaþia (18) apar douã necunoscute: masa de echilibrare erm ºi distanþa de la centrul ei
de masã la axa de rotaþie erρ ; impunând una dintre ele, rezultã cealaltã. 3.2.2. Echilibrarea forþelor de inerþie ale maselor
în miºcare de translaþie Expresia forþei de inerþie este datã de relaþia din paragraful 2.5:
paa amF −= ,
Fig. 3 Fig. 3
C C C C C C C C C
C 10 C 11
C 1C 1C 1C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 64
în care am este suma maselor în miºcare alternativă, iar acceleraþia pistonului:
( )⎥⎥⎦
⎤
⎢⎢⎣
⎡α⋅⋅+αω−= ∑
∞
=12
21
2 2cos2cosk
kp kakaRa ,
coeficienþii 1a ºi ka2 fiind cei ai deplasãrii pistonului. Cu aceste observaþii, forþa de inerþie a maselor în miºcare de translaþie pentru motorul monocilindric cu mecanism normal axat capãtã expresia:
( )
( )
( )
,
2cos2cos
2cos2cos
2cos2cos
1
12
21
2
12
221
2
12
21
2
21 ∑
∑
∑
∑
∞
=
∞
=
∞
=
∞
=
+=
=+=
=+=
=⎥⎥⎦
⎤
⎢⎢⎣
⎡+=
kaa
kkaa
kkaa
kkaa
kFF
kaRmkaRm
kakRmaRm
kakaRmF
αωαω
αωαω
ααω
(19)
unde, þinând cont de valoarea 11 −=a , s-a notat:
αω−= cos21
RmF aa (20)
ºi:
( ) αω= kkaRmF kaa k2cos2 2
22. (21)
Deci, subzistã numai armonica de ordinul I ºi armonicile superioare de ordin par. În momentul iniþial 00 =t , vom avea °=α 0 RAC‚ (manivela la p.m.i.), deci:
21
ω−= RmF aa ; ( )22 22
ω= kRamF kaa k.
Þinând cont de valorile coeficienþilor armonici ai deplasãrii pistonului (paragraful 1.1.2), putem preciza semnul coeficienþilor ka2 din dezvoltarea armonicã:
⎩⎨⎧
∈−=−=
=N,,12,1
2,1sign 2 ppk
pka k (22)
observaþie cu care (21) devine, prin introducerea unui unghi suplimentar k2ϕ , care are semnificaþia unei faze iniþiale:
( )( ) ( ),2cos2
2cos2
222
22
2
kka
kaa
kakRm
akkRmFk
ϕ+αω−=
=αω=
iar:
⎩⎨⎧
∈−==π
=ϕ.N,12,0
2,2 kpk
pkk (23)
Notând în continuare:
( ) ,2 22
2 kaa akRmFk
ω= (24)
vom obþine expresia armonicii superioare de ordin par:
( ).2cos 222 kaa kFFkk
ϕ+α−= (25)
Ultima relaþie este susceptibilã de urmãtoarea interpretare vectorialã Se considerã un vector aplicat în centrul O, de mãrime constantã, egalã cu
Fig. 4
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
65
kaF2
; vectorul se roteºte în sensul manivelei cu
viteza unghiularã ωk2 ; în momentul °=α 0 RAC, când manivela se aflã în poziþia corespunzãtoare p.m.i., vectorul face unghiul k2ϕ cu axa Oy (figura 4,a); þinând seama ºi de convenþia de semne precizatã în paragraful 2.6., în concordanþã cu
signatura coeficienþilor ka2 ‚ vectorii de modul 1aF
ºi 24 −paF vor fi în fazã cu manivela aflatã la p.m.i.,
iar vectorii de modul paF
4 vor fi în opoziþie cu
aceasta; dupã timpul t, în care manivela descrie unghiul tω=α , iar vectorul parcurge un unghi
tkk ω=α 22 , proiecþia vectorului pe axa Oy este
( )ka kFk 22cos
2ϕ+α , care reprezintã chiar valoarea
armonicii de ordinul 2k, în orice moment (figura 4,b).
Vectorul menþionat‚ kaF
2, poate fi echilibrat de
un vector rotitor egal ºi de sens opus, obþinut cu ajutorul unei mase de echilibrare *
2, kaem care
descrie o miºcare de rotaþie cu aceeaºi vitezã de rotaþie ca a vectorului (adicã ωk2 ), decalatã cu
°180 , având centrul de masã situat la distanþa
kae 2,ρ de axa de rotaþie. Masa de echilibrare se
poate determina din relaþia:
ke
ae aRmmka
ka 2*
2,2, ρ= , (26)
obþinutã prin impunerea lui kae 2,
ρ . Deoarece
intereseazã de fapt numai echilibrarea componentei
( )ka kFk 22cos
2ϕ+α ºi constatând cã rãmâne
neechilibratã componenta ( )ka kFk 22sin
2ϕ+α
putem face o altã interpretare vectorialã (figura 4,c). Astfel
kaF2
este rezultanta a doi vectori de
mãrime constantã ºi egalã cu 2/2kaF care se
rotesc în sensuri contrare cu viteza unghiularã ωk2 ºi care fac unghiurile k2ϕ , respectiv ( )k2ϕ− în
momentul ( )RACt °=α= 000 . Cei doi vectori se echilibreazã utilizând douã mase de mãrimea:
*2,2, 2
1kaka ee mm = (27)
unde *2, kaem este dat de (26); masele sunt simetrice
faþã de axa cilindrului, rotindu-se în sens invers una faþã de cealaltã cu viteza 2kω. Proiecþiile normale pe axa cilindrului ale forþelor centrifuge de inerþie ale maselor
kaem2,
se anuleazã reciproc.
Limitându-ne pentru acceleraþia pa la primele
douã armonici, obþinem armonicile de ordin I pentru forþa de inerþie a maselor în miºcare alternativã (20) ºi de ordin II :
.2cos2II
αωλ−= RmF aa . (28)
Practic, la motorul monocilindric se echilibreazã cel mult primele douã armonici. Schema pentru echilibrarea completã a forþelor de inerþie ale maselor în miºcare de rotaþie, rF ºi ale maselor în
miºcare alternativã, III,aF este redatã în figura 5.
Observãm complicarea construcþiei motorului prin existenþa arborilor suplimentari pentru fixarea maselor de echilibrare. O altã soluþie de echilibrare a forþei aF constã în utilizarea unui arbore cotit cu douã coturi suplimentare, pe fiecare fiind articulat un mecanism fals, destinat doar echilibrãrii.
Fig. 5
C C C C C C C C C
C 10 C 11
C 1C 1C 1C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 66
3.2.3. Echilibrarea momentelor de rãsturnare (ruliu) ale forþelor de presiunea a gazelor ºi de
inerþie ale maselor în miºcare de translaþie Momentul de rãsturnare al forþei de presiune a gazelor are expresia datã de prima relaþie din paragraful 3.1. Cu observaþia egalitãþii dintre acesta ºi partea de moment activ datã de presiunea gazelor, folosind relaþia momentului motor datorat forþei de presiune a gazelor pF (conform 2.8),
obþinem:
( )ββ+α
=cos
sinRFM pras p. (1)
Momentul
prasM este o funcþie periodicã de
unghiul de rotaþie, perioada fiind cea a ciclului, cT .
De aceea, prasM este susceptibil de a suporta o
dezvoltare de tipul:
∑∞
=
+=1k
prasrasras kppMMM , (2)
în jurul valorii medii prasM , datã de:
( )∫ αα=c
pp
T
rasc
ras dMT
M0
1, (3)
iar
kprasM reprezintã componentele armonice de
ordinul k, definite prin:
( )α+α= kBkAMkkkp ppras sincos , (4)
unde coeficienþii seriei Fourier, obþinuþi prin integrarea membru cu membru a relaþiei (2), în care s-au introdus
kprasM daþi de (4) ºi multiplicaþi, pe
rând cu αkcos , respectiv αksin ‚ vor fi:
( )
( )⎪⎪⎩
⎪⎪⎨
⎧
ααα=
ααα=
∫
∫c
pk
c
pk
Tras
cp
Tras
cp
dkMT
B
dkMT
A
0
0
sin2
,cos2
. (5)
Dacã introducem unghiul auxiliar kϕ , definit prin:
,arctgk
k
p
pk A
B=ϕ (6)
ºi amplitudinea:
22kkkp ppras BAM += , (7)
dezvoltarea armonicã a momentului de ruliu al forþei de presiune a gazelor capãtã expresia:
( )∑∞
=
ϕ−α+=1
.cosk
prasrasras kkpppkMMM (8)
Integrarea, în relaþiile (3) ºi (5) se face numeric, dispunând de diagrama momentului de ruliu al forþei de presiune a gazelor cu unghiul de manivelã. În continuare, exemplificãm aspectele teoretice anterioare cu motorul Sulzer RTA58, pentru care se prezintã în figura 1 diagrama menþionatã. S-au considerat 12'=n intervale echidistante de mãrime
°=αΔ 30 RAC, calculul coeficienþilor efectuându-se cu relaþiile aproximative:
∑=
='
1'1 n
jrasras jpp
Mn
M , (9)
unde
jprasM sunt momentele citite din diagrama
pentru cele n' puncte ale diviziunii intervalului cT , ºi:
Fig. 1
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
67
( )
( )⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
αΔ=
αΔ=
∑
∑
=
=
'
1
'
1
sin'
2
cos'
2
n
jrasp
n
jrasp
kjMn
B
kjMn
A
jpk
jpk
. (10)
Tot în figura 1 s-au prezentat ºi primele ºase armonici ale momentului de ruliu
prasM , cu
observaþia cã s-a folosit notaþia pras MMp= .
Calculele aratã cã defazajul °=ϕ 88IIp ; valoarea
aceasta poate fi consideratã independentã de caracteristicile motorului, deoarece momentul de ruliu
prasM este proporþional cu presiunea gazelor;
ori, pentru anumite categorii de motoare MAS, MAC rapide, MAC lente, MAC supraalimentate, etc., diagramele indicate prezintã similaritãþi pronunþate, în calculul defazajului, astfel încât factorii de proporþionalitate din expresiile coeficienþilor
kpA ºi
kpB (care au semnificaþia unor momente), specifici
fiecãrui motor în parte, se vor simplifica. Pentru motoarele în patru timpi, pulsaþia ciclului este cc T/2π=ω ; perioada ciclului cT fiind corespunzãtoare la douã turaþii ale arborelui cotit, va fi dublul perioadei de rotaþie a acestuia,
TTT c 2: = , deci 22
2 ω=
π=ω
Tc ‚ semnificaþia pentru
ω fiind cea cunoscutã. Dacã în toate dezvoltãrile armonice anterioare punem tω=α , raportând pulsaþiile momentului
prasM la pulsaþia arborelui
cotit, ordinele armonicilor devin 2k
, N∈k , deci ºirul
armonicilor va fi ,212,2,
211,1,
21
etc.
Armonica de ordinul k a momentului de rãsturnare al forþei de presiune a gazelor, de expresie:
( )kkMMkpkp rasras ϕ−α= cos , (11)
poate fi ºi ea interpretatã ca fiind proiecþia
vectorului de modul kprasM pe axa de rotaþie Oz‚
(a se vedea sistemul din fig. 2), care se roteºte cu viteza unghiularã ωk în sens invers arborelui cotit ºi care face cu axa de rotaþie unghiul
kpϕ atunci
când manivela se aflã la p.m.i.; unghiul kpϕ se
mãsoarã de la axa de rotaþie în sens invers rotaþiei vectorului
kprasM (fig. 2).
Analog relaþiei (1), momentul de rãsturnare al forþelor de inerþie ale maselor în miºcare alternativã va fi:
( )ββ+α
=cos
sinRFM arasa, (12)
aF fiind datã în paragraful 2.5. Fracþia din relaþia de mai sus devine, succesiv:
( )
..2sin21sin
cossinsincossinsin
costgsincos
cossincossincos
sin
αλ+α=
=ααλ+α≅αβ+α≅
≅αβ+α=β
αβ+βα=
ββ+α
Prin aproximaþia fãcutã: β≅β sintg introducem, þinând cont de valorile maxime ale lui β ºi ale lui λ , o eroare sub 3%, acceptabilã pentru calcule uzuale. Expresia (12) devine succesiv:
( )
( ) ( )
( ) ( )
( ) ( )
( ) ( ) ,12sin241
12sin241sin
41
3sin4112sin2
21
12sin221
2sin212sin
21sin
2cos2cos
12
2
12
21
11
22
12
2
122
12
21
22
⎥⎥⎦
⎤α−λ−
−α+λ+αλ+
+αλ+α−⋅−
−α++
⎢⎣⎡ +αω=⎟
⎠⎞
⎜⎝⎛ α+α⋅
⋅⎥⎥⎦
⎤
⎢⎢⎣
⎡α+αω=
∑
∑
∑
∑
∑
∞
=
∞
=
∞
=
∞
=
∞
=
kk
kk
kk
kk
a
kkaras
kak
kaka
akak
kak
aRm
kakaRmMa
cu transformarea produselor de tipul yx cossin în
sume de forma ( ) ( )[ ] 2/sinsin yxyx −++ . Fãcând dezvoltãrile sumelor obþinem:
C C C C C C C C C
C 10 C 11 C 12
C 1C 1C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5
Fig. 2

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 68
( )
( ) ( ) ] ...6sin1645sin188
4sin93sin8241
2sin421sin2
41
228464
62421
4121
ω+αλ−λ+α−+
+α⋅λ−λ+α⎟⎠⎞
⎜⎝⎛ −+λ+
+α⎟⎠⎞
⎜⎝⎛ λ−+⎢
⎣
⎡α⎟
⎠⎞
⎜⎝⎛ −λ=
Rmaaaa
aaaa
aaaaM
a
rasa
Deci ºi pentru momentul de ruliu al forþelor aF se obþine o dezvoltare armonicã:
∑∞
=
αω=1
22 ,sink
karas kbRmMa
(13)
coeficienþii kb fiind daþi de expresiile de mai jos, cu
utilizarea relaþiilor cunoscute pentru coeficienþii ka :
⎪⎪⎪⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪⎪⎪⎪
⎨
⎧
+λ+λ+λ=λ−λ=
+λ+λ+λ=−=
−λ−λ−λ−=λ−λ=
−λ−λ−λ−λ−=−+λ=
−λ−λ−λ−−=λ−=
+λ+λ+λ+λ=−λ=
........................................................................................
...1024115
643
161164
...1024115
25633
81188
...256
3161
419
...1024105
25639
41
4382
41
...1024
35645
161
214
21
...1024
3525615
181
412
41
864846
753645
642624
7534213
864412
753211
aab
aab
aab
aaab
aab
aab
(14) Pentru motorul naval RTA58, la care 4/1=λ , coeficienþii armonici calculaþi la 1.1.2 dau valorile:
0634.01 =b , 5002.02 −=b , 1915.03 −=b ,
0158.04 −=b , 0021.05 =b , 002.06 =b , cu care s-a calculat ºi s-a trasat diagrama din figura 3, în care
aras MMa= .
Notând deci:
,1∑∞
=
=k
rasras kaaMM (15)
cu valoarea componentelor armonice:
( )akkakaras kbRmkbRmMka
ϕ+αω=αω= sinsin 2222
în care s-a introdus faza iniþialã akϕ datã de:
⎩⎨⎧
=π=
=ϕ4,3,2,
6,5,1,0kk
ak , (16)
sugeratã de signatura coeficienþilor kb , putem rescrie:
( )akrasras kMMkaka
ϕ+α= sin , (17)
modulul având valoarea:
karas bRmMka
22ω= . (18)
În acest fel, armonica
karasM poate fi ºi ea
interpretatã ca proiecþia unui vector rotitor de modul
karasM pe axa Oz (fig. 4), rotaþia fãcându-se cu
viteza unghiularã ωk în planul yOz, în sens invers rotaþiei arborelui cotit. Când manivela trece prin poziþia de p.m.i., vectorul face unghiul akϕ cu axa Oy, mãsurat în sensul rotaþiei sale. Referitor la echilibrarea acestor momente, putem face urmãtoarele consideraþii. Momentul de ruliu al forþei de presiune a gazelor variazã cu sarcina motorului (prin intermediul presiunii) ºi practic este invariabil cu turaþia acestuia. Soluþia de echilibrare a sa cu contragreutãþi antrenate de arborele cotit nu se poate aplica. În ceea ce priveºte dezechilibrul produs de momentul de rãsturnare al forþelor de inerþie ale maselor în
Fig. 3 Fig. 4
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
69
miºcare de translaþie, componenta de ordinul II are acþiune determinantã (prin valoarea majorã a coeficientului sãu). Considerând armonicile de ordinul II‚ ale celor douã categorii de forþe aflate în discuþie, date de:
( ) ( )
α=
=°−α≅°−α≅
2sin
902cos882cos
II
IIIIII
p
ppp
ras
rasrasras
M
MMM
ºi:
( ) ,2sin2sinII
α−=π+α=aIIaIIa rasrasras MMM
dezechilibrul produs de
IIarasM este atenuat în
mãsura în care:
IIII pa rasras MM ≅ ,
vectorii care interpreteazã momentele respective fiind aproape în opoziþie de fazã. În fine, toate consideraþiile anterioare au fost fãcute pentru mecanismul motor normal axat. În cazul dezaxãrii apare o componentã suplimentarã a momentului de rãsturnare datorat forþei de presiune a gazelor, în rest problemele se trateazã asemãnãtor mecanismului axat. Dupã prezentarea analizei armonice a momentelor de rãsturnare‚
prasM ºi arasM , este
interesant de fãcut analiza armonicã a momentului de rãsturnare rezultant. Pentru aceasta, se face însumarea vectorialã a celor doi vectori de module
kprasM ºi karasM , þinând cont de fazele iniþiale ale
fiecãruia. Modulul rezultantei va fi:
( )akpkrasrasrasras
ras
kakpkakp
k
MMMM
M
ϕ+ϕ−+=
=
sin222
(19) Atunci când manivela se aflã în poziþia de p.m.i., vectorul face unghiul kϕ cu axa Oy, dat de:
akakpkpk
akakpkpkk
MM
MM
ϕ+ϕ
ϕ+ϕ=ϕ
cossin
sincosarctg , (20)
ºi se roteºte cu viteza unghiularã ωk în sens invers sensului de rotaþie al arborelui cotit. Proiecþia vectorului pe axa de rotaþie reprezintã armonica de ordinul k a momentului de ruliu rezultant (fig. 5), precizatã de:
( )krasras kMMkk
ϕ+α= sin , (21)
iar momentul de rãsturnare va fi:
∑∞
=
=1k
rasras kMM . (22)
Fig. 5
C C C C C C C C C
C 10 C 11 C 12
C 1C 1C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 70
3.3. Echilibrarea motoarelor policilindrice în linie
Ipotezele în perimetrul cãrora înscriem consideraþiile urmãtoare sunt: motorul are aprinderile uniform repartizate, cilindrii sunt identici ºi echidistanþi. În paragraful 3.1 s-au precizat cauzele dezechilibrãrii motorului policilindric. Vom expune în continuare pe rând, echilibrarea fiecãreia, þinând cont de cele douã categorii de solicitãri: forþe de inerþie ºi momente de ruliu, momente ale forþelor de inerþie.
3.3.1. Echilibrarea forþelor de inerþie ºi a momentelor de ruliu
În paragraful 3.2.2 s-a fãcut interpretarea vectorialã a forþelor de inerþie ale maselor în miºcare de translaþie, iar în 3.2.3 a momentului de ruliu pentru componentele de orice ordin armonic k,
N∈k . Dacã adãugãm la acestea ºi interpretarea vectorialã a forþei de inerþie a maselor în miºcare de rotaþie, fãcutã la sfârºitul paragrafului 2.5, problema echilibrãrii tuturor forþelor ºi momentelor menþionate poate fi tratatã unitar, prin intermediul unui vector de modul kV unde:
{ } N,,,, ∈∈ kMFFVkrasark (1)
vector care se roteºte cu viteza unghiularã ωk . Proiectat pe axa Oy interpreteazã forþa de inerþie a maselor în miºcare alternativã (pentru ordine pare); proiectat pe axa Oz interpreteazã momentul de rãsturnare. Poziþia vectorului faþã de axa Oy, în momentul când manivela trece prin p.m.i., este datã de faza iniþialã kψ ; atunci când 0=ψ k , vectorul interpreteazã fie forþa de inerþie a maselor în miºcare de rotaþie, fie armonica de ordinul I a forþei de inerþie a maselor în miºcare de translaþie. În fine, ultima observaþie asupra interpretãrii unitare este aceea cã sensul de rotaþie al vectorului
kV este identic cu acela al arborelui cotit atunci
când ne referim la forþele de inerþie ºi invers în cazul momentului de ruliu. Deoarece în cazul motorului policilindric, pentru acelaºi ordin armonic k, avem câte un vector
aferent fiecârui cilindru ( ijVjk ,1, = i-numãrul de
cilindri), putem face asocierea dintre steaua
manivelelor ºi steaua vectorilor rotitori jkV .
În figura 1 s-a reprezentat steaua manivelelor, cu considerarea manivelelor în ordinea de aprindere. Aºa cum s-a arãtat în paragraful 2.10.1, unghiul dintre manivelele a doi cilindri în care aprinderile sunt consecutive este egal cu:
( ) ,1,1,.,1 −==δ=+∠ ijconstjj (2)
relaþie analogã celei ce exprima la 3.1 echidistanþa cilindrilor, ambele constituind exprimarea matematicã a ipotezei de motor policilindric cu aprinderi uniform repartizate ºi cilindri echidistanþi. Unghiul pe care manivela de ordinul j îl face cu axa Oy‚ va fi: ( ) ( ) ijjOyj ,1,1, =δ−+α=∠ , (3)
unde α este unghiul fãcut de manivela 1 cu axa Oy, iar δ este decalajul unghiular între douã aprinderi succesive. Vom suprapune, peste steaua
manivelelor, steaua vectorilor jkV . Unghiul dintre
vectorul jkV ºi axa Oy ‚va fi:
( ) ( )[ ] kk jkOyVj
ψ+δ−+α=∠ 1, , (4)
în care faza iniþialã kψ , este aceeaºi pentru mecanismele tuturor cilindrilor, în ipoteza identitãþii acestora. În acest caz, putem determina ºi unghiul dintre doi vectori kV consecutivi:
( ) ( ) ( )[ ]
.
1,1
ik
iT
kk
jkjkVV
c
kkkk jj
τπ==δ=
=ψ−δ−+α−ψ+δ+α=∠+
(5)
De aici apar douã situaþii posibile:
a) Cazul N,2 ∈π=τπ ppi
k . Aceasta conduce la::
⎪⎩
⎪⎨⎧
=τ
=timpipatruinmotorpentru
timpidoiinmotorpentru
,2
,2
ip
pii
pk .
În acest caz, decalajul unghiular dintre doi vectori fiind πp2 , rezultã cã toþi vectorii au aceeaºi direcþie ºi sens, deci dau o rezultantã:
Fig. 1
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56
kδ
kδ

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
71
01
1
≠===∑=
k
i
jkkk ViViVV
jj, (6)
de i ori mai mare decât modulul componentei de ordinul k pentru un cilindru. Deoarece vectorii de
modul jkV sunt în fazã, vectorul rezultant rãmâne
permanent în acelaºi plan perpendicular pe axa de rotaþie a arborelui cotit ca ºi vectorii menþionaþi ºi, în consecinþã, acest vector poate fi echilibrat cu mase de echilibrare.
b) Cazul N,2 ∈π≠τπ ppi
k . În acest caz, pentru
determinarea rezultantei vectorilor de modul jkV ,
se proiecteazã aceºtia pe axele sistemului mobil ηξO ‚ axa ξO coincizând cu direcþia vectorului
jkV , iar Oη perpendicularã pe ea. Rezultanta are
deci modulul:
22ηξ
+= kkk VVV , (7)
iar componentele sale au valorile:
( )
( )⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
δ−=
δ−=
∑
∑
=
=
η
ξ
i
jkk
i
jkk
kjVV
kjVV
1
1
1sin
1cos
1
1
, (8)
în care s-au considerat, ca ºi în (6), cã vectorii au
acelaºi modul ijconstVV kk j,1,.
1=== , pentru
orice N∈k , mecanismele aferente fiecãrui cilindru fiind identice. Calculul lui
ηξ kk VV , se face înmulþind
relaþia a doua din setul (8) cu 1−=∗i ºi adunând-o apoi membru cu membru cu prima:
( ) ( )[ ]
( )
( )( )
( )( )
=⎟⎠⎞
⎜⎝⎛ δ
⎟⎠⎞
⎜⎝⎛ δ
−⎟⎠⎞
⎜⎝⎛ δ
⎟⎠⎞
⎜⎝⎛ δ
⎟⎠⎞
⎜⎝⎛ δ
−⎟⎠⎞
⎜⎝⎛ δ
=
=δ−δ−
δ−δ−=
=δ+δ−
δ+δ−=
−−
=
==δ+δ=
=δ−+δ−=+
∗
∗
∗
∗
∗
∗
= =
−−∗
=
∗∗
∑ ∑
∑ηξ
2cos
2sin2
2sin2
2cos
2sin2
2sin2
sincos1sincos1
sincos1sincos1
11
sincos
1sin1cos
2
2
1 1
11
1
1
1
11
11
1
kkik
kikiiki
V
kikikiikV
kikkikV
zzV
zVkikV
jijVViV
k
k
i
k
i
k
i
j
i
j
jk
jk
i
jkkk
( ) ( ) ,2
1sin2
1cos
2sin2
2sin2
2sin
2cos
2sin
2cos
2sin2
2sin2
2cos
2sin
2sin2
2cos
2sin
2sin2
1
1
1
⎭⎬⎫
⎩⎨⎧
⎥⎦⎤
⎢⎣⎡ δ
−+⎥⎦⎤
⎢⎣⎡ δ
−⎟⎠⎞
⎜⎝⎛ δ
⎟⎠⎞
⎜⎝⎛ δ
=
=⎟⎠⎞
⎜⎝⎛ δ
+⎟⎠⎞
⎜⎝⎛ δ
⎟⎠⎞
⎜⎝⎛ δ
+⎟⎠⎞
⎜⎝⎛ δ
⋅⎟⎠⎞
⎜⎝⎛ δ
⎟⎠⎞
⎜⎝⎛ δ
=
=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ δ
−⎟⎠⎞
⎜⎝⎛ δ
⎟⎠⎞
⎜⎝⎛ δ
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ δ
−⎟⎠⎞
⎜⎝⎛ δ
⎟⎠⎞
⎜⎝⎛ δ
=
∗
∗
∗
∗
∗
ikiikk
ki
V
kik
kiiki
k
ki
V
kikk
kiikiki
V
k
k
k
unde s-a introdus numãrul complex
δ+δ= ∗ sincos iz . Prin identificarea pãrþilor reale ºi imaginare, obþinem:
( )
( )
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
=δ
⎥⎦⎤
⎢⎣⎡ δ
−⎟⎠⎞
⎜⎝⎛ δ
=
=δ
⎥⎦⎤
⎢⎣⎡ δ
−⎟⎠⎞
⎜⎝⎛ δ
=
η
ξ
0
2sin
21sin
2sin
0
2sin
21cos
2sin
1
1
k
ikki
VV
k
ikki
VV
kk
kk
, (9)
deoarece:
⎩⎨⎧
ππ
=τπ
=δ
timpipatruinmotorpentru
timpidoiinmotorpentru
,2,
22 kkkk
.
Aºadar, în cazul când:
⎪⎩
⎪⎨⎧
≠timpipatruinmotorpentru
timpidoiinmotorpentru
,2
,ip
pik ,
vectorii de ordinul k dau o rezultantã nulã. O caracterizare a calitãþii echilibrãrii motoarelor din punct de vedere al forþelor de inerþie ºi al momentelor de ruliu este redatã în tabelul 1. Constatãm cã echilibrarea motoarelor în linie se îmbunãtãþeºte odatã cu creºterea numãrului de cilindri, prin creºterea ordinului minim al componentei care nu se anuleazã, amplitudinea armonicilor superioare fiind în descreºtere. Mai observãm cã motoarele în doi timpi sunt superioare motoarelor în patru timpi cu acelaºi numãr de cilindri. Cele mai slabe calitãþi de echilibrare le au motoarele în patru timpi cu numãrul de cilindri putere de doi. Rezultatele anterioare corespund numãrului par de cilindri; în cazul când motorul are numãr impar
C C C C C C C C C
C 1C 1C 1
C 13 C 1C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 72
de cilindri, atunci raþia progresiei aritmetice
unghiulare este de forma i
k τπ; vor subzista
armonicile de ordinul:
⎩⎨⎧
=τ
=timpipatruinmotorpentru
timpidoiinmotorpentru
,,24
pipi
ipk .
Deoarece însã avem evidenta relaþie între mulþimile: { } { } NN2 ∈∈ ∈ pp pipi putem prezenta urmãtoarea schemã a ordinelor armonice care subzistã, în funcþie de numãrul de timpi ai ciclului motor:
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
+=∈
==
,12,N,
,2,2
,
mipim
miip
pi
ktimpipatruinmotorulpentru
timpidoiinmotorpentru
Vom observa cã situaþia 0=k corespunde cazului b) ºi forþelor de inerþie ale maselor în miºcare de rotaþie, la care, deci, rezultanta este nulã, indiferent de paritatea numãrului de cilindri ai motorului ºi de timpi ai ciclului acestuia. Analiza tratãrii unitare a forþelor de inerþie ºi momentelor de ruliu cu interpretarea vectorialã prin intermediul vectorului rotitor de modul kV permite
ºi precizarea soluþiei de echilibrare a armonicii respective, în cazul când aceasta subzistã, cu ajutorul unor mase de echilibrare care se rotesc în sens opus una alteia, cu viteza unghiularã ωk . Pentru motoarele policilindrice normal axate, cu aprinderi uniform repartizate ºi cilindri echidistanþi, prezentãm, în figura 2, schema de echilibrare generalã a forþelor de inerþie a maselor în miºcare alternativã
kaF2
(mecanismul motor aferent fiecãrui
cilindru fiind normal axat, subzistã doar armonicile
de ordin par). Se folosesc în acest scop douã mase de echilibrare
kaem2
care se rotesc în sensuri inverse
una faþã de alta cu viteza unghiularã ωk2 ºi care dezvoltã forþe centrifuge de inerþie de mãrimea:
Tabelul 1
τ i k 0Vk ≠ 0Vk = Caracterizarea echilibrãrii
2 2pk ⋅= ...,V,V,V,V VIIIVIIVII IV satisfãcãtoare
3 3pk ⋅= ...V,V,V XIIIXIII , ...,V,V,V,V VIIIIVIII foarte bunã
4 4pk ⋅= ...,V,V,V XIIVIIIIV ...,V,V,V,V XVIIII bunã 2
6 6pk ⋅= ...,V,V XIIVI ...,V,V,V,V VIIIIVIII foarte bunã
2 1pk ⋅= ...,V,V,V,V,V VIIIVIIVIII --- nesatisfãcãtoare
4 2pk ⋅= ...,V,V,V,V VIIIVIIVII IV satisfãcãtoare
6 3pk ⋅= ...,V,V,V XIIIXVI ...,V,V,V,V,V xVIIIIVIII foarte bunã 4
8 4pk ⋅= ...,V,V,V XIIVIIIIV ...,V,V,V,V xVIIII bunã
Fig. 2
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
73
( )22222
ωρ= kmFkakaka eee .
Proiecþiile acestora pe axa Oy echilibreazã forþele de inerþie
kaF2
ale întregului motor, care
conform celor prezentate la cazul a), dau o forþã de mãrime de i ori mai mare. Deci:
( )kka ake iFkF
22 22cos2 =ϕ+α ,
unde
kaF2
este datã de relaþia de la 3.2.2. De aici,
valoarea masei de echilibrare va fi:
ke
ae aRmimka
ka 22
2 2 ρ= , (10)
ka2 fiind daþi la 1.1.2. În plus, schema prezintã ºi posibilitatea echilibrãrii momentului de ruliu de ordin par 2k produs de forþele de inerþie în miºcare alternativã, prin deplasarea maselor de echilibrare dispuse în continuare simetric faþã de planul median al motorului (care coincide, la motoarele navale, cu planul diametral al navei), în lungul axei Oy cu distanþa yΔ . Reamintim cã momentul de ruliu produs de forþa de presiune a gazelor depinde de sarcina motorului ºi este puþin sensibil la variaþia turaþiei. Calculul deplasãrii yΔ se face þinând cont de condiþia:
( )kaka raske iMkyF
22 22sin =ϕ+αΔ ,
unde karasM
2 se ia din paragraful 3.2.3, pentru
ordin par, caz în care coincid ºi fazele iniþiale ale forþelor
kaF2
ºi momentului karasM
2. Deci:
( ) k
k
ab
Rk
y2
222
2=Δ , (11)
pentru kb2 luând valorile din setul de relaþii corespunzãtor din 3.2.3. Metodologia de echilibrare simultanã este aplicatã de firma MITSUBISHI pentru motoare în patru timpi cu patru cilindri, la care subzistã armonica de ordinul II (a se vedea tabelul 1). În acest caz, în relaþia (11), valabilã pentru 1=k (ordinul II), luând pentru ka2 ºi kb2 valorile:
21;
4 22 −≅λ
−≅ ba ,
obþinem:
LRy =λ
=Δ ,
L fiind lungimea bielei. Dar relaþia de determinare a decalãrii yΔ a fost dedusã în ipoteza
proporþionalitãþii cu karasM
2 ºi cum dezechilibrul
produs de armonica de ordinul II a momentului de rãsturnare al forþelor de inerþie ale maselor în miºcare de translaþie este atenuatã de componenta de acelaºi ordin a momentului de rãsturnare al forþei de presiune a gazelor, conform observaþiei din paragraful citat, decalarea yΔ se poate micºora, diminuând gabaritul motorului, conform relaþiei:
( )zLy −=Δ 1 , (12) unde z va fi dat de:
II
II
a
p
ras
ras
M
Mz = . (13)
În cazul necesitãþii echilibrãrii armonicelor de ordinul II la motoarele în doi timpi cu doi cilindri (tabelul 1) din seria Sulzer RTA58, vom fi nevoiþi sã înãlþãm motorul numai cu valoarea
mLy 68.02.0 =⋅=Δ , raportul (13) având valoarea 8.0=z . Firma MAN B&W aplicã motoarelor navale
din seria MC schema din figura 3.
Fig. 3
C C C C C C C C C
C 1C 1C 1
C 13 C 1C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 74
Din tabelul 1, aºa cum s-a arãtat anterior, motoarele în doi timpi cu doi cilindri ºi în patru timpi cu patru cilindri prezintã numai dezechilibrul de ordinul I compensat total. Soluþia cea mai dezavantajoasã o prezintã motorul în patru timpi cu doi cilindri, la care subzistã absolut toate armonicile. De aceea, uneori la acest ultim tip de motor se adoptã soluþia de arbore cotit de motor în doi timpi. Aºadar, în locul soluþiei de arbore cotit cu manivelele în faza care nu echilibreazã nici o armonicã, soluþia cu manivelele în opoziþie echilibreazã armonica de ordinul I, care este ºi cea mai mare. În schimb, a doua soluþie sacrificã soluþia uniformitãþii aprinderilor ºi motorul va avea un grad de neuniformitate al miºcãrii mai mare sau, pentru acelaºi grad, masa volantului va fi mai mare.
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
75
3.3.2. Echilibrarea momentelor forþelor de inerþie
3.3.2.1. Echilibrarea momentelor forþelor de inerþie ale maselor în miºcare de rotaþie
Deºi forþele de inerþie ale maselor în miºcare de rotaþie dau o rezultantã nulã, prin faptul cã acþioneazã în plane diferite genereazã momente de dezechilibru, acþionând asupra reazemelor motorului. Aºa cum reiese din figura genericã a cauzelor dezechilibrãrii (paragraf 3.1)., forþele de inerþie ale maselor în miºcare de rotaþie dau un moment de galop care acþioneazã în planul yOz, definit de relaþia:
∑=
=i
jjrr aYM
jx1
, (1)
ºi un moment de ºerpuire conþinut în planul xOz dat de:
∑=
=i
jjrr aXM
jy1
, (2)
componentele jrX ºi
jrY fiind cele din 3.1.
Cele douã componente se însumeazã vectorial (fig. 1,a) ºi dau o rezultantã rM , precizatã de:
22yx rrr MMM += . (3)
Deoarece forþele rF formeazã un sistem indeformabil, momentul rezultant va fi constant ca mãrime ºi va fi ºi el un vector rotitor ca ºi sistemul de forþe rF , viteza de rotaþie fiind egalã cu cea a arborelui cotit. Schimbându-ºi direcþia faþã de reazemele
motorului, momentul rM produce trepidaþia acestuia, fiind deci un moment extern. Componentele vectorului, ca mãrimi pulsatorii, au expresiile:
rrrrrr MMMMyx
θ=θ= sin;cos , (4)
unde:
x
y
r
rr M
Marctg=θ (5)
este unghiul de calare a contragreutãþii pe arborele cotit. Echilibrarea momentului rM se face printr-un
vector reM egal ºi de sens contrar cu acesta.
Momentul rotitor de echilibrare reM se realizeazã
cu douã mase de echilibrare ∗rem , egale, care se
rotesc în acelaºi sens cu arborele cotit, cu viteza unghiularã ω , mase situate la distanþa ∗ρ
re de axa
de rotaþie ºi în acelaºi plan rotitor cu al vectorului
rM (fig. 1,b).
Momentul extern rM se calculeazã faþã de un punct de referinþã ales arbitrar pe axa de rotaþie. Convenþional îl luãm chiar în originea sistemului de axe la distanþa a de axa ultimului cilindru. Masele de echilibrare se amplaseazã de obicei în prelungirea braþului anterior al primului cilindru ºi a braþului posterior a ultimului cilindru. Condiþia de echilibrare va fi:
( )[ ] rmee Mhlaimrr
=++−ωρ∗∗ 12 , (6)
unde ml este lungimea fusului maneton, iar h este grosimea unui braþ al arborelui cotit. De aici, se de-
Fig. 1
( ) hlai m ++−1
C C C C C C C C C
C 1C 1C 1
C 13 C 14
C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 76
terminã masele de echilibrare ∗
rem , impunând ∗ρre .
Cazul general prezentat este specific motoarelor în doi timpi, ca ºi motoarelor în patru timpi cu numãr impar de cilindri. În cazul motorului în patru timpi cu numãr par de cilindri, forþele rF vor fi în fazã, douã câte douã, iar faþã de planul central de simetrie vor da un moment extern nul. Dar, cu toate acestea dezechilibrul intern persistã, forþele rF încãrcând lagãrele intermediare. Dintre metodele de echilibrare internã amintim: echilibrare braþ cu braþ (fig. 2,a), care anuleazã efectul momentului intern ºi descarcã lagãrele palier de acþiunea forþelor rF . Soluþia este costisitoare, implicând tehnologii complicate, creºtere a masei, scãderea frecvenþei proprii. Se aplicã în mod frecvent la motoarele navale în patru timpi, semirapide; apoi existã metoda mai simplã de echilibrare de ansamblu, cu descãrcare parþialã a lagãrelor (fig. 2,b). În fine, existã ºi soluþii combinate.
3.3.3.2. Echilibrarea momentelor forþelor de inerþie ale maselor în miºcare de translaþie
Forþele de inerþie ale maselor în miºcare de translaþie se constituie într-un sistem de vectori
paraleli ºi coplanari (acþioneazã în planul yOz ºi au suporturile paralele cu Oy). Sistemul de vectori se reduce la o rezultantã:
∑=
=i
jaa j
FR1
(7)
ºi un moment rezultant, aM , dat de:
∑=
==i
jjaaa aYMM
jx1
(8)
ºi care nu conþine decât componenta de galop. În formulele anterioare,
jaY este datã la 3.1, iar jaF la
3.2.2, indicele referindu-se la cilindrul cu numãrul de ordine j, În paragraful 3.3.1 s-au analizat situaþiile când aR se poate anula. Pe baza schemei din figura 3, vom analiza posibilitãþile de anulare a lui aM . Conform teoremei lui Varignon, suma momentelor unui sistem de vectori este egalã cu momentul rezultantei sistemului în raport cu unul ºi acelaºi punct 0C :
reza
i
jja aRaF
j=∑
=1
, (9)
unde reza reprezintã coordonata punctului 0C în sistemul din figurã (adicã poziþia rezultantei faþã de originea sistemului). Aplicând relaþia (9) pentru componentele armonice de ordin 2k, N∈k (mecanism normal axat), vom obþine succesiv:
( )[ ]{ }
( )[ ]{ }∑
∑
=
=
ϕ+δ−+α=
=ϕ+δ−+α
i
jkarez
i
jjka
jkFa
ajkF
jk
jk
12
12
,12cos
12cos
2
2
Fig. 2
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56
Fig. 3

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
77
de unde, considerând cã:
.,12
constFij
a jk=
=
coordonata reza devine:
( )[ ]{ }
( )[ ]{ }∑
∑
=
=
ϕ+δ−+α
ϕ+δ−+α
=i
jk
i
jkj
rez
jk
jka
a
12
12
12cos
12cos
, (10)
relaþie valabilã în ipoteza repartizãrii uniforme a aprinderilor. Dacã:
( ) N, ∈π=δ− ppjk 212 , (11) formula (10) devine:
i
a
a
i
jj
rez
∑== 1
. (12)
În cazul cilindrilor echidistanþi, pentru distanþele
ja se alege forma:
( )ajia j −+= 1 , (13)
a fiind valoarea distanþei dintre doi cilindri consecutivi. Cu aceasta (12) devine:
( ) ( ) aiai
iiiajia
i
jrez 2
12
111
+=
+=⎟
⎟
⎠
⎞
⎜⎜
⎝
⎛+−= ∑
=
, (14)
adicã suportul rezultantei se aflã la mijlocul arborelui cotit. Condiþia (11) aratã cã termenii de ordin 2k sunt permanent în fazã, situaþie în care existã o rezultantã, aºa cum s-a arãtat în 3.3.1. Pe baza relaþiei (14), vom face observaþia cã este raþional sã se calculeze momentul de dezechilibru al forþelor de inerþie ale maselor în miºcare de translaþie faþã de punctul 0C , care reprezintã intersecþia dintre axa de rotaþie ºi suportul rezultantei forþelor, þinând cont de participarea forþelor de inerþie corespunzãtoare fiecãrei jumãtãþi de arbore cotit la valoarea totalã a momentului. Astfel calculat, momentul se defineºte ca moment extern, iar momentul corespunzãtor numai unei jumãtãþi a arborelui cotit se defineºte ca moment intern. Aºa cum s-a arãtat la prezentarea cauzelor dezechilibrãrii, momentul extern produce dezechilibrul motorului, cauzând reacþiuni pe reazeme, iar cel intern provoacã solicitãri de încovoiere asupra arborelui cotit ºi a structurii de rezistenþã a motorului. În cazul componentelor armonice care dau o rezultantã nulã, valoarea momentului extern este independentã de punctul în raport cu care se efectueazã calculul; în schimb, pentru componentele armonice care dau o rezultantã nenulã, valoarea minimã a momentului extern (eventual nulã) se obþine numai faþã de planul central de simetrie al arborelui cotit (punctul
0C ), deoarece în acest caz suportul rezultantei constituie axa centralã a sistemului de vectori (axa centralã fiind locul geometric al punctelor în care momentul rezultant este minim). Aºadar, de câte ori este posibil, vom adopta soluþii de arbori cotiþi cu plan central de simetrie; reamintim cã aceasta este valabilã pentru motoarele cu numãr par de cilindri, în patru timpi, cu manivelele în fazã, ºi doi timpi, cu manivelele în opoziþie. Fie o astfel de soluþie de arbore cotit (fig. 4).
Fig. 3
Fig. 4
C C C C C C C C C
C 1C 1C 1
C 13 C 14
C 1C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5
2k[α+(j-1)δ]+ϕ2k
2k[α+(i-j)δ]+ϕ2k

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 78
Considerãm o manivelã oarecare j ºi simetrica sa faþã de planul central de simetrie CC − . Cu linie întreruptã s-a figurat situaþia motoarelor în doi timpi (fig. 4). Distanþele de la planele de simetrie ale manivelelor la punctul 0C vor fi:
( ) ajiaiajiaa rezj 212
211 +−
=+
−+−=−
ºi
ajijaaiaa jirez 212
21
1+−
=−+
=− +− .
Momentul forþelor de inerþie ale maselor în miºcare alternativã aferente cilindrilor j ºi 1+− ji
faþã de punctul 0C va fi:
( ) ( )
( )[ ]{ }{
( )[ ]{ }} ( )
( )[ ].12sin2
12sin
122cos
12cos2
12
2
2
12
2
12
2
11
2
1
2
2
122
1222
δ+−⎭⎬⎫
⎩⎨⎧
ϕ+⎥⎦⎤
⎢⎣⎡ δ
−+α⋅
⋅⋅+−=ϕ+δ−+α−
−ϕ+δ−+α⋅+−
=
=⎥⎦⎤
⎢⎣⎡ −−−=
=⎟⎠⎞⎜
⎝⎛ −=
∑
∑
∑
∑
=
=
=+−
=
+−
+−
jikik
Fajijik
jkFaji
aaFaaF
MMM
k
a
i
jk
i
jka
i
jjirezarezja
i
jaaa
k
k
jikjk
jikjkk
(15) Pe baza consideraþiilor referitoare la unghiul dintre manivela j ºi axa cilindrului (paragraf 3.3.1), apreciem defazajul unghiular dintre manivelele j ºi
1+− ji , ca fiind:
( ) ( ) ( )[ ] ( )δ+−=δ−+α−δ−+α=+−∠ 121,1 jijjijji (16) Pentru motoarele în patru timpi, manivelele simetrice faþã de planul central de simetrie CC − ‚ sunt în fazã, iar valoarea defazajului definit de (16) este π2 ; pentru motoarele în doi timpi, manivelele simetrice fiind în opoziþie de fazã, defazajul va fi π . În toate cazurile valoarea momentului precizat prin relaþia (15) va fi nulã. Concluzia care decurge de aici este deci urmãtoarea: la motoarele cu plan central de simetrie, momentele de galop ale componentelor de rang par vor fi nule. Considerând motorul normal axat, persistã numai armonicile de ordinul I; acestea dau, de asemenea, un moment nul faþã de punctul central 0C la motoarele în patru timpi, manivelele simetrice fiind în fazã. În schimb, la
motorul în doi timpi, momentele armonicilor de ordinul I dau un moment diferit de zero faþã de mijlocul 0C al arborelui cotit. Pentru echilibrarea sa, se utilizeazã un dispozitiv a cãrui schemã este prezentatã în figura 5. Masele dispozitivului de echilibrare a momentului
paM (p este ordinul armonicilor care dau moment
nenul I sau 2k, atunci când arborele cotit nu ar avea plan central de simetrie) nu trebuie sã se roteascã, în mod obligatoriu, în jurul axei Oz. Rolul dispozitivului este de a avea în planul yOz douã forþe egale, paralele ºi de sens contrar cu momentul
paM .
Se observã cã aceastã condiþie este îndeplinitã dacã masele dispozitivului se rotesc în jurul unor axe paralele, conþinute într-un plan perpendicular pe planul yOz, la egalã distantã de o parte ºi de alta a planului yOz. În jurul uneia din axe se rotesc în sens pozitiv douã mase în opoziþie, iar în jurul celeilalte axe se rotesc în sens negativ celelalte douã mase în opoziþie; valoarea comunã a acestor mase se determinã din condiþia:
( )pppapa aaee Mlpm =θωρ∗∗ cos2 2 , (17)
unde 0≠
paM , aºa cum s-a menþionat anterior;
unghiul de calare paθ al contragreutãþilor are
valoare nulã, datoritã persistenþei doar a componentelor de galop.
Fig. 5
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
79
3.3.3. Analiza echilibrãrii unor motoare în linie Vom aplica teoria expusã în paragrafele anterioare în cazul unor motoare cu cilindrii dispuºi în linie. Se lucreazã în condiþiile repartizãrii uniforme a aprinderilor ºi a echidistanþei cilindrilor; de asemenea, motoarele se considerã ca având mecanismele normal axate. În aceste condiþii, vom studia în mod predilect motoarele în doi timpi cu numãr par de cilindri, deoarece în cazul numãrului impar de cilindri, arborele cotit este identic pentru motoarele în doi ºi patru timpi; ceea ce diferã este ordinea de aprindere. În cazul numãrului par de cilindri, arborele cotit al motorului în patru timpi este realizat cu plan central de simetrie, fiecare manivelã din prima jumãtate fiind în fazã cu manivela cu poziþie simetricã din cea de a doua jumãtate. Manivelele unei jumãtãþi fiind uniform distribuite în jurul axei de rotaþie, ele formeazã arborele cotit al unui motor în doi timpi, cu jumãtate din numãrul de cilindri ºi aprinderi uniform distribuite. Soluþiile de arbori cotiþi dinamic distincte se vor selecþiona pe baza criteriului momentului intern minim. Aceasta înseamnã cã fiecare dintre cele douã jumãtãþi ale soluþiei optime de arbore cotit pentru un motor în patru timpi cu i cilindri constituie un arbore cotit cu
2/i cilindri, la care momentele externe vor fi minime (cu definirea momentelor externe ºi interne fãcute în paragraful anterior). De aceea, determinarea soluþiilor optime de arbori cotiþi pentru motoarele în patru timpi se va rezuma la o simplã aplicaþie a rezultatelor obþinute pentru motoarele în doi timpi. În figura 1 se prezintã soluþia vizatã prin consideraþiile anterioare, pentru un motor în patru timpi, cu aprinderi uniform repartizate, cilindri echidistanþi, cu plan central de simetrie. Se vor analiza, în conformitate cu observaþiile anterioare,
forþele ºi momentele de dezechilibru pentru prima jumãtate a arborelui cotit, care reprezintã soluþia pentru motorul în doi timpi ºi cu jumãtate din numãrul de cilindri ai motorului în patru timpi. Deci sistemul de referinþã triortogonal se va transporta din O în 0C , adicã în mijlocul arborelui cotit. Vom preciza urmãtoarele mãrimi: a) decalajul unghiular: [ ]RAC°δ ; b) ordinea de aprindere ºi numãrul de aprinderi succesive în vecinãtatea aceluiaºi lagãr palier σ ; c) unghiurile fãcute de planele manivelelor cu axa cilindrilor respectivi, conform figurii dezechilibrelor motorului policilindric în linie de la
3.1: [ ]RACj °α , ij ,1= ;
d) rezultanta forþelor de inerþie: • ale maselor în miºcare de rotaþie:
∑=
=i
jrr j
FR1
,
conform tabelului de la paragraful 3.3.1; • ale maselor în miºcare alternativã;
• armonica de ordinul I:
∑=
=i
jaa j
FR1
II,
conform aceluiaºi tabel;
• armonica de ordinul II:
∑=
=i
jaa j
FR1
IIII,
conform tabelului menþionat anterior; în cazul
în care:
Fig. 1
C C C C C C C C C
C 1C 1C 1
C 13 C 14 C 15
C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 80
02cos1
IIII≠α= ∑
=
i
jjaa FR ;
masa de echilibrare este datã la 3.3.1; se introduce notaþia:
II
ii
II 8~
a
a
aea
ee
Rim
mm
ρλ
== , (1)
iar schema de echilibrare este de tipul celei din paragraful menþionat;
e) momentele externe ale forþelor de inerþie: • ale maselor în miºcare de rotaþie:
xrM , yrM ºi
rM , date în 3.3.2.1; se introduc mãrimile adimensionale (coeficienþii momentelor):
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
+=
=
=
22 ~~~
1~
1~
yx
y
y
x
x
rrr
r
rr
r
rr
MMM
F
M
aM
F
M
aM
; (2)
se calculeazã unghiul rθ cu relaþia din 3.3.2.1, soluþia de echilibrare fiind cea din figura corespunzãtoare; masa de echilibrare relativã este:
( ) remr
ee MR
hlaia
m
mm
r
r
r
~1
~∗
∗∗
ρ⋅
++−== (3)
• ale maselor în miºcare alternativã: se calculeazã momentele vectorilor rotitori ale cãror proiecþii pe axa cilindrilor interpreteazã armonicile de ordinul I ale forþelor de inerþie; aceºti vectori în fazã cu manivelele dau momente dupã axele xC0
ºi yC0 , pentru care se calculeazã coeficienþii:
I
I
I
1~
a
aa F
M
aM x
x= , (4)
unde
xaMI
, se calculeazã faþã de originea 0C , cu
relaþiile:
∑=
α=i
jjjaa aFM
jx1
cosII
. (5)
Deci coeficienþii momentelor omoloage ale forþelor de inerþie ale maselor în miºcare de rotaþie
ºi ale maselor în miºcare alternativã (armonicile de ordinul I) sunt egali:
xx ra MM ~~I= . (6)
Unghiul de calare din schema de echilibrare ilustratã în 3.3.3.2,
Iaθ , va fi egal cu 0‚ iar masa de
adimensionalã:
I
II
I
I
~cos2
1~a
eaa
ee MR
la
m
mm
a
a
a ∗∗
ρ⋅
θ⋅== . (7)
Se calculeazã componentele dupã axele xC0 ºi
yC0 ale momentelor de dezechilibru ale vectorilor rotitori ale cãror proiecþii pe axele cilindrilor dau armonicile de ordinul II ale forþelor de inerþie. Deoarece aceºti vectori se rotesc cu o vitezã unghiularã de douã ori mai mare decât a arborelui cotit, componentele momentelor de ordinul II vor fi:
∑=
α=i
jjjaa aFM
jx1
2cosIIII
. (8)
Se introduce momentul adimensional:
II
II
II
1~
a
aa F
M
aM x
x= , (9)
iar valoarea adimensionalã a maselor de echilibrare este:
II
a
a
a aeaa
ee MR
la
m
mm ~
cos8~
IIII
II
II ∗
∗∗
ρ⋅
θ⋅
λ== . (10)
Momentul adimensional rezultant de ordinul II este:
xaa MMIIII
~~= . (11)
f) momentele interne ale forþelor de inerþie vor fi momentele acestor forþe aferente primei jumãtãþi a arborelui cotit al motorului în doi timpi, deci faþã de mijlocul 0C′ al arborelui. Momentul intern de ordinul I va fi:
∑=
α′=2/
1
cosII
i
jjjai aFM
jx. (12)
Se introduc ºi în acest caz momentele adimensionale:
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
81
I
I
I
1~
a
ii
F
M
aM x
x= , (13)
xii MMII
~~= (14)
Pentru momentul intern de ordinul II avem:
∑=
α′=i
jjjai aFM
jx1
2cosIIII
, (15)
iar pentru cele adimensionale:
II
II
II
1~
a
ii F
M
aM x
x= , (16)
xii MMIIII
~~= . (17)
În relaþiile anterioare, avem:
ijFRmF
FRmFRmF
j
j
aaa
aaarr
,1,
;
IIII
II
2
22
=∀=ωλ=
=ω=ω= (18)
ºi distanþele de la axa cilindrului j pânã la punctul
0C , respectiv 0C′ :
ajia j ⎥⎦⎤
⎢⎣⎡ +−=
21
(19)
ºi
ajia j ⎥⎦⎤
⎢⎣⎡ +−=′
21
2. (20)
Algoritmul prezentat va fi aplicat, în cele ce urmeazã, în cazul unor motoare în linie. • Motorul cu doi cilindri
a) ;1802
360°=
°=δ
b) 2;121 =σ−−
c) ;180;0 21 RAC°=δ=α°=α
d) ;0;0I== ar RR
( ) ( )[ ]
;4
;021802cos02cos
III
IIIII
aIa
I
ee
aaa
Rm
FFR
ρ⋅
λ=
==°⋅+°⋅⋅=
e) ;1180cos210cos
23
=°⋅+°⋅=xrM
( ) ( )
( ) ( )
;4
~
;0;2~;01802sin
2102sin
23~
;21802cos2102cos
23~
;21~
;0;1~;0~;1~
;~
;0;01
;0180sin210sin
23
II
II
IIII
II
II
I
I
II
∗∗
∗∗
∗∗
ρ⋅⋅
λ=
°=θ=
=°⋅⋅+°⋅⋅=
=°⋅⋅+°⋅⋅=
ρ⋅⋅=
°=θ===
ρ⋅
++=
°=θ≠=
=°⋅+°⋅=
a
a
y
x
a
a
IyxI
r
r
y
ee
aa
a
a
ee
aaaa
eme
rr
r
Rlam
M
M
M
Rlam
MMM
Rhla
am
M
M
f) ;21~;00sin
21~;
210cos
21~
III==°⋅==°⋅= iii MMM
yx
( ) ( )
.21~
;002sin21~;
2102cos
21~
II
IIII
=
=°⋅⋅==°⋅⋅=
i
ii
M
MMyx
• Motorul cu trei cilindri
a) ;1203
360°=
°=δ
b) ;2;1231 =σ−−−
c) ;2;;0 321 δ=αδ=α°=α RAC
d) ;0;0;0III=== aar RRR
e) ( ) ;232cos
21cos
230cos
25~
=δ⋅⋅+δ⋅+°⋅=xrM
( )
;43~
;0;23~;0~;
23~
;2
3~
;30;3~
;232sin
21sin
230sin
25~
I
I
IIII
∗∗
∗∗
ρ⋅⋅=
°=θ===
ρ⋅
++⋅⋅
=
°=θ=
=δ⋅⋅+δ⋅+°⋅=
a
a
yx
r
r
y
ee
aaaa
eme
rr
r
Rlam
MMM
Rhla
am
M
M
C C C C C C C C C
C 1C 1C 1
C 13 C 14 C 15
C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 82
( ) ( )
;16
3~
;0;5.1~;0~
;5.14cos212cos
230cos
25~
II
II
IIII
II
II
∗∗
ρ⋅⋅
λ⋅=
°=θ=
=
=δ⋅⋅+δ⋅⋅+°⋅=
a
a
y
x
ee
aa
a
a
Rlam
M
M
M
f) ;1~;0~;10cos1~III===°⋅= iii MMM
yx
( ) .1~;0~;102cos1~IIIIII===°⋅⋅= iii MMM
yx
• Motorul cu patru cilindri
a) ;904
360°=
°=δ
b) ;2;12431 =σ−−−−
c) ;2;3;;0 4321 δ⋅=αδ⋅=αδ=α°=α RAC
d) ;0III=== aar RRR
e) ( )+δ⋅+δ+°= 3cos23cos
250cos
27~
xrM
( ) ;32cos21
=δ⋅+
( )( ) ;12sin
213sin
23sin
250sin
27~
=δ⋅⋅
⋅+δ⋅⋅+δ⋅+°⋅=yrM
( ) ( )( )
;0~;0~;0~
;04cos216cos
232cos
250cos
27~
;23~
;0;3~;0~;3~
;3
10~
;'261831arctg;10~
II
II
II
II
I
I
IIII
=
=
=
=δ⋅⋅
⋅+δ⋅⋅+δ⋅⋅+°⋅=
ρ⋅⋅=
°=θ===
ρ⋅
++⋅⋅
=
°==θ=
∗
∗∗
∗∗
a
y
x
a
a
yx
r
r
e
a
a
a
ee
aaaa
eme
rr
m
M
M
M
Rlam
MMM
Rhla
am
M
f) ;0~;5.1cos210cos
23~
II==δ⋅+°⋅=
yx ii MM
;5.1~I=iM
( ) .1~;0~;12cos210cos
23~
IIIIII===δ⋅+°⋅= iii MMM
yx
• Motorul cu cinci cilindri
a) ;725
360°=
°=δ
b) ;2;152341 =σ−−−−−
c) ;;4;3;2;0 54321 δ=αδ⋅=αδ⋅=αδ⋅=α°=α RAC
d) ;0III=== aar RRR
e) ( ) ( )+δ⋅⋅+δ⋅+°⋅= 3cos252cos
270cos
29~
xrM
( ) ;264.0cos214cos
23
=δ⋅+δ⋅⋅+
( ) ( )
( )
( ) ( ) ( )
( )
;592.0~
;0
;736.4~;0~
;736.42cos21
8cos236cos
254cos
270cos
29~
;132.0~
;0;264.0~;0~;264.0~
;4
449.0~
;54264.0363.0arctg;449.0~
;363.0sin214sin
23
3sin252sin
270sin
29~
II
II
II
II
II
II
I
IIII
∗∗
∗∗
∗∗
ρ⋅⋅λ⋅=
°=θ
=
=
=δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅+°⋅=
ρ⋅⋅=
°=θ===
ρ⋅
++⋅⋅
=
°−=−
=θ=
−=δ⋅+δ⋅⋅+
+δ⋅⋅+δ⋅+°⋅=
a
a
y
x
Ia
a
yx
r
r
y
ee
a
a
a
a
ee
aaaa
eme
rr
r
Rlam
M
M
M
Rlam
MMM
Rhla
am
M
M
f) ( ) ;198.12cos10cos2~I
=δ⋅⋅+°⋅=xiM
;198.1~;0~II== ii MM
y
( ).309.2~;0~
;309.24cos10cos2~
IIII
II
==
=δ⋅+°⋅=
ii
i
MM
M
y
x
• Motorul cu ºase cilindri
a) ;606
360°=
°=δ
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
83
b) ;1;1534261 =σ−−−−−− (soluþia firmelor MAN B&W ºi Sulzer;
c) ;;3;2;4;0 54321 δ=αδ⋅=αδ⋅=αδ⋅=α°=α
;56 δ⋅=α
d) ;0III=== aar RRR
e) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 2cos274cos
290cos
211~
xrM
( ) ( ) ;05cos21cos
233cos
25
=δ⋅⋅+δ⋅+δ⋅⋅+
( ) ( )
( ) ( )
( ) ( )
( ) ( ) ( )
;8
3~
;0
;3~;0~
;310cos212cos
236cos
25
4cos278cos
290cos
211~
;0~
;0~~~;0;0~
;0~;05sin
21sin
233sin
25
2sin274sin
290sin
211~
II
II
II
II
II
II
I
III
o
∗∗
∗
∗
ρ⋅⋅
λ⋅=
°=θ
=
=
=δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
=
===
=θ=
=
=δ⋅⋅+δ⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
a
a
y
x
a
yx
r
y
ee
a
a
a
a
e
aaa
re
r
r
Rlam
M
M
M
m
MMM
m
M
M
f) ( ) ( ) ;5.12cos214cos
230cos
25~
I=δ⋅⋅+δ⋅⋅+°⋅=
xiM
;5.1~;0~iI==
IyMM i
( ) ( )
.5.1~;0~;5.14cos
218cos
230cos
25~
IIII
II
==
=δ⋅⋅+δ⋅⋅+°⋅=
ii
i
MM
M
y
x
Observaþie: Soluþia de arbore cotit, datã prin ordinea de aprindere de la punctul b) are 1=σ : aceasta se preferã soluþiei cu 0=σ din tabelul 1, paragraful 2.10.1, datoritã valorii mici a momentelor externe.
• Motorul cu ºapte cilindri
a) ;'25517
360°=
°=δ
b) ;2;17254361 =σ−−−−−−− (soluþia firmelor MAN B&W ºi Sulzer);
c) ;4;5;2;0 4321 δ⋅=αδ⋅=αδ⋅=α°=α
;;6;3 765 δ=αδ⋅=αδ⋅=α
d) ;0III=== aar RRR
e) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 5cos292cos
2110cos
213~
xrM
( ) ( ) ( )
;116.0cos21
6cos233cos
254cos
27
=δ⋅+
+δ⋅⋅+δ⋅⋅++δ⋅⋅+
( ) ( )
( ) ( ) ( )
;'1764
;116.0~;0~;116.0~
;6
267.0~
;'1764;267.0~
;241.0sin21
6sin233sin
254sin
27
5sin292sin
2110sin
213~
I
III
°−=θ
===
ρ⋅
++⋅⋅
=
°−=θ=
−=δ⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
∗∗
a
aaa
eme
r
r
r
MMM
Rhla
am
M
M
yx
r
r
y
( ) ( )
( ) ( ) ( )
( )
;786.0~;0~
;786.02cos21
12cos236cos
258cos
27
10cos294cos
2110cos
213~
II
II
II
=
=
=δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
a
a
a
M
M
M
y
x
;098.0~
;0
II
II
∗∗
ρ⋅⋅λ⋅=
°=θ
IIa
ae
e
a
Rlam
f) ( ) ( ) =δ⋅⋅+δ⋅⋅+°⋅= 5cos12cos20cos3~xIiM
;332.2=
;332.2~;0~I
==Iy ii MM
( ) ( ).297.0~;0~
;297.010cos14cos20cos3~
IIII
II
==
=δ⋅⋅+δ⋅⋅+°⋅=
ii
i
MM
M
y
x
C C C C C C C C C
C 1C 1C 1
C 13 C 14 C 15
C 1C 1C 1C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 84
• Motorul cu opt cilindri
a) ;458
360°=
°=δ
b) 165274381 −−−−−−−− (soluþia firmei Sulzer);
c) ;5;6;3;0 4321 δ⋅=αδ⋅=αδ⋅=α°=α
;7;4;;2 8765 δ⋅=αδ⋅=αδ=αδ⋅=α
d) ;0III=== aar RRR
e) ( ) +δ⋅+δ⋅⋅+°⋅= cos2
113cos2
130cos2
15~xrM
( ) ( ) ( )
( ) ;343.07cos21
4cos23cos
252cos
275cos
29
=δ⋅⋅+
+δ⋅⋅+δ⋅+δ⋅⋅+δ⋅⋅+
( )
( ) ( )
( ) ( )
;0
;343.0~;0~;343.0~
;7
896.0~
;'2667;896.0~
;828.07sin214sin
23
sin252sin
275sin
29
sin2
113sin2
130sin2
15~
I
III
°=θ
===
ρ⋅
++⋅⋅
=
°=θ=
=δ⋅⋅+δ⋅⋅+
+δ⋅+δ⋅⋅+δ⋅⋅+
+δ⋅+δ⋅⋅+°⋅=
∗∗
a
aaa
eme
r
r
r
MMM
Rhla
am
M
M
yx
r
r
y
( ) ( )
( ) ( ) ( )
( ) ( )
;0~;0~
;014cos218cos
23
2cos254cos
2710cos
29
2cos2
116cos2
130cos2
15~
II
II
II
=
=
=δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
a
a
a
M
M
M
y
x
;0~;0
II
II
=
°=θ∗
ae
a
m
f) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 6cos233cos
250cos
27~
IxiM
( ) ;378.15cos21
=δ⋅⋅+
;378.1~;0~II== ii MM
y
( ) ( )
( )
.2~;0~;210cos
21
12cos236cos
250cos
27~
IIII
II
==
=δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
ii
i
MM
M
y
x
Vom da în continuare ºi soluþia de arbore cotit utilizatã la motoarele navale produse de firma MAN B&W, pentru acelaºi numãr de cilindri:
a) ;458
360°=
°=δ
b) ;1;182645371 =σ−−−−−−−−
c) ;4;6;2;0 4321 δ⋅=αδ⋅=αδ⋅=α°=α
;;7;3;5 8765 δ=αδ⋅=αδ⋅=αδ⋅=α
c) ;0III=== aar RRR
e) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 6cos2
112cos2
130cos2
15~xrM
( ) ( ) ( )+δ⋅⋅+δ⋅⋅+δ⋅⋅+ 3cos255cos
274cos
29
( ) ;171.0cos217cos
23
=δ⋅+δ⋅⋅+
( ) ( )
( ) ( ) ( )
( )
;085.0~
;0
;171.0~;0~;171.0~
;7
448.0~
;'3367;448.0~
;414.0sin217sin
23
3sin255sin
274sin
29
6sin2
112sin2
130sin2
15~
I
I
III
∗∗
∗∗
ρ⋅⋅λ⋅=
°=θ
===
ρ⋅
++⋅⋅
=
°=θ=
−=δ⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
Ia
a
yx
r
r
y
ee
a
aaa
eme
r
r
r
Rlam
MMM
Rhla
am
M
M
( ) ( )
( ) ( ) ( )
( )
;0~;0~
;0cos2114cos
23
6cos2510cos
278cos
29
12cos2
114cos2
130cos2
15~
II
II
II
=
=
=δ⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
a
a
a
M
M
M
y
x
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
85
;0~;0
II
II
=
°=θ∗
ae
a
m
f) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 6cos232cos
250cos
27~
IxiM
( ) ;34cos21
=δ⋅⋅+
;3~;0~II== ii MM
y
( ) ( )
( )
.0~;0~;08cos
21
12cos234cos
250cos
27~
II
==
=δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
IIyII
x
ii
i
MM
M
Situaþia echilibrãrii pentru soluþia 0=σ , datã în tabelul 1 din paragraful 2.10.1 este, de asemenea, prezentatã:
a) ;458
360°=
°=δ
b) ;0;146285371 =σ−−−−−−−−
c) ;;6;3;0 4321 δ=αδ⋅=αδ⋅=α°=α
;4;7;2;5 8765 δ⋅=αδ⋅=αδ⋅=αδ⋅=α
d) ;0III=== aar RRR
e) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 6cos2
113cos2
130cos2
15~xrM
( ) ( )
( ) ( ) ;171.44cos217cos
23
2cos255cos
27cos
29
=δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅+
( ) ( ) +δ⋅⋅+δ⋅⋅+°⋅= 6sin2
113sin2
130sin2
15~yrM
( ) ( )
( ) ( )
;085.2~
;0
;171.4~;0~;171.4~
;7
352.4~
;'3516;352.4~
;243.14sin217sin
23
2sin255sin
27sin
29
I
I
I
III
∗∗
∗∗
ρ⋅⋅=
°=θ
===
ρ⋅
++⋅⋅
=
°=θ=
=δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅+
a
a
yx
r
r
ee
a
aaa
eme
r
r
Rlam
MMM
Rhla
am
M
( ) ( )
( ) ( ) ( )
( ) ( )
;0~;0~
;08cos2114cos
23
4cos2510cos
272cos
29
12cos2
116cos2
130cos2
15~
II
II
II
=
=
=δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
a
a
a
M
M
M
y
x
;0~;0
II
II
=
°=θ∗
ae
a
m
f) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 6cos233cos
250cos
27~
I xiM
;086.2cos21
=δ⋅+
;086.2~;0~II== ii MM
y
( ) ( )
( ) ;22cos21
12cos236cos
250cos
27~
II
=δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=xiM
.2~;0~IIII== ii MM
y
Fig. 1
C 1C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 86
Observaþie: Se poate constata, din cele de mai sus, cã minim=σ nu constituie criteriul esenþial în alegerea soluþiei de arbore cotit. Aceasta se triazã cel mai frecvent pe baza criteriilor de echilibrare. Se mai observã cã soluþia MAN conduce la momente externe mai mici, deci ºi la mase de echilibrare mai mici; în plus, numãrul σ este mai mic faþã de cel al soluþiei de arbore cotit adoptat de firma Sulzer, în schimb momentele interne sunt mai mari. A treia soluþie, cu moment extern de ordinul II nul, ca ºi în celelalte variante, prezintã însã toate celelalte momente mai mari, deºi 0=σ . În figura 1 se dau variantele de cuplare a manivelelor în opoziþie de fazã pentru fiecare dintre soluþiile de mai sus.
• Motorul cu nouã cilindri
a) ;409
360°=
°=δ
b) ;2;1927456381 =σ−−−−−−−−−
c) ;4;7;2;0 4321 δ⋅=αδ⋅=αδ⋅=α°=α
;;8;3;6;5 98765 δ=αδ⋅=αδ⋅=αδ⋅=αδ⋅=α
d) ;0III=== aar RRR
e) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 7cos2
132cos2
150cos2
17~xrM
( ) ( ) ( )
( ) ( ) ;066.0cos218cos
233cos
25
6cos275cos
294cos
211
=δ⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
( ) ( )
( ) ( ) ( )
( ) ( )
;033.0~
;0
;066.0~;0~;066.0~
;8
193,0~
;70;193.0~
;182.0sin218sin
233sin
25
6sin275sin
294sin
211
7sin2
132sin2
150sin2
17~
I
I
I
III
∗∗
∗∗
ρ⋅⋅=
°=θ
===
ρ⋅
++⋅⋅
=
°−=θ=
−=δ⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
a
a
yx
r
r
y
ee
a
aaa
eme
r
r
r
Rlam
MMM
Rhla
am
M
M
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
;352.0~;0~
;352.02cos2116cos
236cos
25
12cos2710cos
298cos
211
14cos2
134cos2
150cos2
17~
II
II
II
=
=
=δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
a
a
a
M
M
M
y
x
;044.0~
;0
II
II
II
∗∗
ρ⋅⋅λ⋅=
°=θ
a
ae
e
a
Rlam
f) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 7cos22cos30cos4~IxiM
( ) ;928.34cos1 =δ⋅⋅+
;928.3~;0~II== ii MM
y
( ) ( )( )
.067.0~;0~;067.08cos1
14cos24cos30cos4~
IIII
II
==
=δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
ii
i
MM
M
y
x
Vom prezenta în continuare ºi soluþia de arbore cotit de motor cu nouã cilindri în linie adoptatã de firma Sulzer. b) ;2;1852943761 =σ−−−−−−−−−
c) ;5;6;3;0 4321 δ⋅=αδ⋅=αδ⋅=α°=α
;4;;7;8;2 98765 δ⋅=αδ=αδ⋅=αδ⋅=αδ⋅=α
e) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 6cos2
133cos2
150cos2
17~xrM
( ) ( ) ( )
( ) ( ) ;907.04cos21cos
237cos
25
8cos272cos
295cos
211
=δ⋅⋅+δ⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
( ) ( )
( ) ( ) ( )
( ) ( )
;453.0~
;0
;907.0~;0~;907.0~
;8
921.0~
;10;921.0~
;160.04sin21sin
237sin
25
8sin272sin
295sin
211
6sin2
133sin2
150sin2
17~
I
I
I
III
∗∗
∗∗
ρ⋅⋅=
°=θ
===
ρ⋅
++⋅⋅
=
°−=θ=
−=δ⋅⋅+δ⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
a
a
yx
r
r
y
ee
a
aaa
eme
r
r
r
Rlam
MMM
Rhla
am
M
M
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
;387.0~;0~
;387.0
8cos212cos
2314cos
25
16cos274cos
2910cos
211
12cos2
136cos2
150cos2
17~
II
II
II
=
=
=
=δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
a
a
a
M
M
M
y
x
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
87
;048.0~
;0
II
II
II
∗∗
ρ⋅⋅λ⋅=
°=θ
a
ae
e
a
Rlam
f) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 6cos23cos30cos4~IxiM
( ) ;560.05cos1 =δ⋅⋅+
;560.0~;0~II== ii MM
y
( ) ( )( )
.266.2~;0~;266.210cos1
12cos26cos30cos4~
IIII
II
==
=δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
ii
i
MM
M
y
x
Cele douã variante de ordine de aprindere realizeazã acelaºi 2=σ . Momentele externe ale primei soluþii sunt, aºa cum se poate constata, mai mici; în schimb, momentul intern de ordinul I al celei de-a doua soluþii este mai mic decât în primul caz. • Motorul cu zece cilindri Vom prezenta, mai întâi, din multimea variantelor posibile (a se vedea paragraful 2.10.1.) soluþia firmei constructoare Sulzer:
a) ;3610
360°=
°=δ
b) ;3;178341026591 =σ−−−−−−−−−−
c) ;8;4;3;6;0 54321 δ⋅=αδ⋅=αδ⋅=αδ⋅=α°=α
;5;9;2;;7 109876 δ⋅=αδ⋅=αδ⋅=αδ=αδ⋅=α
d) ;0III=== aar RRR
e) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 3cos2
156cos2
170cos2
19~xrM
( ) ( ) ( )
( ) ( )
( ) ;326.05cos21
9cos232cos
25cos
27
7cos298cos
2114cos
213
−=δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
( ) ( )
( ) ( ) ( )
( ) ( )
( )
;9
326.0~
;0;326.0~
;05sin21
9sin232sin
25sin
27
7sin298sin
2114sin
213
3sin2
156sin2
170sin2
19~
∗∗
ρ⋅
++⋅⋅
=
°=θ=
=δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
r
r
y
eme
r
r
r
Rhla
am
M
M
;163.0~
;0
;326.0~;0~;326.0~
I
I
I
II
∗∗
ρ⋅⋅=
°=θ
==−=
a
a
Iyx
ee
a
aaa
Rlam
MMM
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( )
;0~;0~
;010cos21
18cos234cos
252cos
27
14cos2916cos
2118cos
213
6cos2
1512cos2
170cos2
19~
II
II
II
=
=
=δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
a
a
a
M
M
M
y
x
;0~;0
II
II
=
°=θ∗
ae
a
m
f) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 3cos5.26cos5.30cos5.4~IxiM
( ) ( ) ;163.08cos5.04cos5.1 −=δ⋅⋅+δ⋅⋅+
;163.0~;0~II== ii MM
y
( ) ( )( ) ( )
.618.3~;0~;618.316cos5.08cos5.1
6cos5.212cos5.30cos5.4~
IIII
II
==
=δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
ii
i
MM
M
y
x
Datoritã inconvenientului mãrimii momentelor externe semnalat, firma Sulzer utilizeazã, începând din 1973, arbore cotit cu urmãtoarea ordine de aprindere: b) ;1;161024953781 =σ−−−−−−−−−−
c) ;6;4;7;3;0 54321 δ⋅=αδ⋅=αδ⋅=αδ⋅=α°=α
;2;5;9;8; 109876 δ⋅=αδ⋅=αδ⋅=αδ⋅=αδ=α
d) ;0III=== aar RRR
e) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 7cos2
153cos2
170cos2
19~xrM
( ) ( )
( ) ( ) ( )
( ) ;247.02cos21
5cos239cos
258cos
27
cos296cos
2114cos
213
=δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅+δ⋅⋅+δ⋅⋅+
( ) ( )
( ) ( )
( ) ( ) ( ) +δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
5sin23
9sin25
8sin27
sin29
6sin2
114sin
213
7sin2
153sin
217
0sin2
19~yrM
C 1C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 88
( ) ;138.02sin21
−=δ⋅⋅+
( ) ( )
( ) ( )
( ) ( ) ( )
( )
;123.0~
;0
;247.0~;0~;247.0~
;9
238.0~
;'1129;238.0~
;138.02sin21
5sin239sin
258sin
27
sin296sin
2114sin
213
7sin2
153sin2
170sin2
19~
I
I
III
∗∗
∗∗
ρ⋅⋅=
°=θ
===
ρ⋅
++⋅⋅
=
°−=θ=
−=δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
Ia
a
yx
r
r
y
ee
a
aaa
eme
r
r
r
Rlam
MMM
Rhla
am
M
M
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( )
;691.0~;0~
;691.04cos21
10cos2318cos
2516cos
27
2cos2912cos
2118cos
213
14cos2
156cos2
170cos2
19~
II
II
II
=
=
=δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
a
a
a
M
M
M
y
x
;086.0~
;0
II
II
∗∗
ρ⋅⋅λ⋅=
°=θ
Ia
ae
e
a
Rlam
f) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 7cos5.23cos5.30cos5.4~IxiM
( ) ( ) ;028.16cos5.04cos5.1 =δ⋅⋅++δ⋅⋅+
;028.1~;0~iI==
IyMMi
( ) ( )( ) ( )
.264.0~;0~;264.012cos5.08cos5.1
14cos5.26cos5.30cos5.4~
IIII
II
==
=δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
ii
i
MM
M
y
x
Aºadar, faþã de prima soluþie, obþinem moment de dezechilibru de ordinul I mai mic ºi un numãr σ mai mic, de asemenea. În continuare prezentãm o soluþie cu acelaºi σ , dar cu momente externe mai mici, în schimb cu momente interne mai mari: b) ;1;110284657391 =σ−−−−−−−−−−
c) ;6;4;8;2;0 54321 δ⋅=αδ⋅=αδ⋅=αδ⋅=α°=α
;;9;3;7;5 109876 δ=αδ⋅=αδ⋅=αδ⋅=αδ⋅=α
e) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 8cos2
152cos2
170cos2
19~xrM
( ) ( ) ( )
( ) ( ) ( )
;0cos21
9cos233cos
257cos
27
5cos296cos
2114cos
213
=δ⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
;0~;0
;0~;0~;0~;0~
;0;0~
;0sin21
9sin233sin
257sin
27
5sin296sin
2114sin
213
8sin2
152sin2
170sin2
19~
I
I
III
=
°=θ
===
=
=θ=
=δ⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
∗
∗
a
yx
r
y
e
a
aaa
e
r
r
r
m
MMM
m
M
M
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ;528.02cos21
18cos236cos
2514cos
27
10cos2912cos
2118cos
213
16cos2
154cos2
170cos2
19~II
=δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=xaM
;528.0~
;0~
II
II
=
=
a
a
M
My
;066.0~
;0
I
II
II
∗∗
ρ⋅⋅λ⋅=
°=θ
a
ae
e
a
Rlam
f) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 8cos5.22cos5.30cos5.4~IxiM
( ) ( ) ;736.46cos5.04cos5.1 =δ⋅⋅+δ⋅⋅+
;736.4~;0~II== ii MM
y
( ) ( )( ) ( )
.264.0~;0~;264.012cos5.08cos5.1
16cos5.24cos5.30cos5.4~
IIII
II
==
=δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
ii
i
MM
M
y
x
Vom face în continuare comparaþia cu soluþia pentru care 0=σ : b) ;0;197581024631 =σ−−−−−−−−−−
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
89
c) ;3;7;9;6;0 54321 δ⋅=αδ⋅=αδ⋅=αδ⋅=α°=α
;5;;4;2;8 109876 δ⋅=αδ=αδ⋅=αδ⋅=αδ⋅=α
e) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 9cos2
156cos2
170cos2
19~xrM
( ) ( ) ( )
( ) ( )
( ) ;146.65cos21
cos234cos
252cos
27
8cos293cos
2117cos
213
=δ⋅⋅+
+δ⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅++δ⋅⋅+
( ) ( )
( ) ( ) ( )
( ) ( )
( ) ;955.85sin21
sin234sin
252sin
27
8sin293sin
2117sin
213
9sin2
156sin2
170sin2
19~
−=δ⋅⋅+
+δ⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=yrM
;073.3~
;0
;146.6~;0~;146.6~
;9
861.10~
;'3255;861.10~
I
I
I
III
∗∗
∗∗
ρ⋅⋅=
°=θ
===
ρ⋅
++⋅⋅
=
°−=θ=
a
a
yx
r
r
ee
a
aaa
eme
r
r
Rlam
MMM
Rhla
am
M
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( )
;0~;0~
;010cos21
2cos238cos
254cos
27
16cos296cos
21114cos
213
18cos2
1512cos2
170cos2
19~
II
II
II
=
=
=δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
a
a
a
M
M
M
y
x
;086.0~
;0
I
II
II
∗∗
ρ⋅⋅λ⋅=
°=θ
a
ae
e
a
Rlam
f) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 9cos5.26cos5.30cos5.4~IxiM
( ) ( ) ;073.33cos5.07cos5.1 =δ⋅⋅++δ⋅⋅+
;073.3~;0~II== ii MM
y
( ) ( )( ) ( )
.736.4~;0~;736.46cos5.014cos5.1
18cos5.212cos5.30cos5.4~
IIII
II
==
=δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
ii
i
MM
M
y
x
În figura 2 s-au reprezentat variantele de cuplare a manivelelor în opoziþie pentru fiecare din situaþiile prezentate anterior, referitor la echilibrarea motorului cu zece cilindri în doi timpi. Sunt situaþii în care se poate realiza minimalizarea simultanã sau chiar anularea armonicilor de ordinul I ºi II ale momentelor externe. Acestea se întâmplã atunci când se modificã distanþa dintre cilindrii motorului. Condiþia care se impune este aceea cã lungimea arborelui cotit sã fie minimã. Astfel, firma FIAT realizeazã o minimalizare atât a momentelor externe, cât ºi a celor interne, adoptând o soluþie de arbore cotit ca cea din figura 3, cu valoarea calculatã a lungimii suplimentare, între cilindrii 5 ºi 6 ai arborelui cotit:
aa 6.1=Δ . S-au obþinut urmãtoarele momente adimensionale, pentru ordinele de aprindere indicate: 1)-ordinea de aprindere:
;1;168431052791 =σ−−−−−−−−−−
;476.0~;986.1~;476.0~;205.0~IIIIII==== iiaa MMMM
2)-ordinea de aprindere:
;1;187351024961 =σ−−−−−−−−−−
;844.0~;189.2~;476.0~;205.0~IIIIII==== iiaa MMMM
3)-ordinea de aprindere:
;2;187431052961 =σ−−−−−−−−−−
.588.0~;986.1~;363.0~;314.0~IIIIII==== iiaa MMMM
Fig. 2
C 1C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 90
• Motorul cu unsprezece cilindri
a) ;'433211
360°=
°=δ
b) ;0;11129476583101 =σ−−−−−−−−−−−
c) ;4;9;2;0 4321 δ⋅=αδ⋅=αδ⋅=α°=α
;;10;3
;8;5;6;7
11109
8765
δ=αδ⋅=αδ⋅=αδ⋅=αδ⋅=αδ⋅=αδ⋅=α
d) ;0III=== aar RRR
e) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 9cos2
172cos2
190cos221~
xrM
( ) ( ) ( )
( ) ( ) ( )
( ) ;043.0cos2110cos
23
3cos258cos
275cos
29
6cos2
117cos2
134cos2
15
=δ⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( )
;021.0~
;0
;043.0~;0~;043.0~
;10
153.0~
;'4173;153.0~
;147.0sin2110sin
23
3sin258sin
275sin
29
6sin2
117sin2
134sin2
15
9sin2
172sin2
190sin221~
I
I
III
∗∗
∗∗
ρ⋅⋅=
°=θ
===
ρ⋅
++⋅⋅
=
°−=θ=
−=δ⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
Ia
a
yx
r
r
y
ee
a
aaa
eme
r
r
r
Rlam
MMM
Rhla
am
M
M
( ) ( )
( ) ( ) ( )+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
12cos2
1114cos2
138cos2
15
18cos2
174cos2
190cos221~
IIxaM
( ) ( ) ( )
( ) ( )
;206.0~;0~
;206.02cos2120cos
23
6cos2516cos
2710cos
29
II
II
=
=
=δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
a
a
M
My
;025.0~
;0
II
II
II
∗∗
ρ⋅⋅λ⋅=
°=θ
a
ae
e
a
Rlam
f) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 9cos32cos40cos5~IxiM
( ) ( ) ;943.57cos14cos2 =δ⋅⋅++δ⋅⋅+
;943.5~;0~II== ii MM
y
( ) ( )( ) ( )
.011.0~;0~;011.014cos18cos2
18cos34cos40cos5~
IIII
II
==
−=δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
ii
i
MM
M
y
x
Soluþia aplicatã de firma SULZER are urmãtoarele caracteristici de echilibrare: b) ;0;11046821137591 =σ−−−−−−−−−−−
c) ;9;2;7;5;0 54321 δ⋅=αδ⋅=αδ⋅=αδ⋅=α°=α
;6
;;10;4;8;3
11
109876
δ⋅=αδ=αδ⋅=αδ⋅=αδ⋅=αδ⋅=α
e) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 7cos2
175cos2
190cos221~
xrM
( ) ( ) ( )
( ) ( ) ( )
( ) ;804.06cos21cos
23
10cos254cos
278cos
29
3cos2
119cos2
132cos2
15
=δ⋅⋅+δ⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( )
;0
;804.0~;0~;804.0~
;10
812.0~
;'128;812.0~
;116.06sin21sin
23
10sin254sin
278sin
29
3sin2
119sin2
132sin2
15
7sin2
175sin2
190sin221~
I
III
°=θ
===
ρ⋅
++⋅⋅
=
°=θ=
=δ⋅⋅+δ⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
∗∗
a
aaa
eme
r
r
r
MMM
Rhla
am
M
M
yx
r
r
y
Fig. 3
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
91
;402.0~
I
I ∗∗
ρ⋅⋅=
a
ae
eR
lam
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( )
;103.0~;0~
;103.012cos212cos
23
20cos258cos
2716cos
29
6cos2
1118cos2
134cos2
15
14cos2
1710cos2
190cos221~
II
II
II
=
=
=δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
a
a
a
M
M
M
y
x
;013.0~
;0
II
II
II
∗∗
ρ⋅⋅λ⋅=
°=θ
a
ae
e
a
Rlam
f) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 7cos35cos40cos5~xIiM
( ) ( ) ;443.09cos12cos2 =δ⋅⋅+δ⋅⋅+
;443.0~;0~II== ii MM
y
( ) ( )( ) ( )
.973.5~;0~;973.518cos14cos2
14cos310cos40cos5~
IIII
II
==
=δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
ii
i
MM
M
y
x
• Motorul cu doisprezece cilindri
a) ;3012
360°=
°=δ
b) ;0;1751024126831191 =σ−−−−−−−−−−−−
c) ;2;5;9;4;0 54321 δ⋅=αδ⋅=αδ⋅=αδ⋅=α°=α
;6;10
;3;11;8;;7
1211
109876
δ⋅=αδ⋅=αδ⋅=αδ⋅=αδ⋅=αδ=αδ⋅=α
d) ;0III=== aar RRR
e) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 9cos2
194cos2210cos
223~
xrM
( ) ( ) ( )
( ) ( )
( ) ( ) ( );804.2
6cos2110cos
233cos
25
11cos278cos
29cos
211
7cos2
132cos2
155cos2
17
=
=δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
( ) ( )
( ) ( ) ( )
( ) ( )
( ) ( ) ( ) =δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
6sin2110sin
233sin
25
11sin278sin
29sin
211
7sin2
132sin2
155sin2
17
9sin2
194sin2210sin
223~
yrM
;402.1~
;0
;804.2~;0~;804.2~
;11
077.6~
;'3162;077.6~;392.5
I
I
I
III
∗∗
∗∗
ρ⋅⋅=
°=θ
===
ρ⋅
++⋅⋅
=
°=θ=
=
a
a
yx
r
r
ee
a
aaa
eme
r
r
Rlam
MMM
Rhla
am
M
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
;0~;0~
;012cos2120cos
236cos
25
22cos2716cos
292cos
211
14cos2
134cos2
1510cos2
17
18cos2
198cos2210cos
223~
II
II
II
=
=
=δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
a
a
a
M
M
M
y
x
;0~;0
II
II
=
°=θ∗
ae
a
m
f) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 9cos5.34cos5.40cos5.5~IxiM
( ) ( ) ( );402.1
7cos5.02cos5.15cos5.2=
=δ⋅⋅+δ⋅⋅+δ⋅⋅+
;402.1~;0~II== ii MM
y
( ) ( )( ) ( )( )
.0~;0~;014cos5.0
4cos5.110cos5.2
18cos5.38cos5.40cos5.5~
IIII
II
==
=δ⋅⋅++δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
ii
i
MM
M
y
x
O soluþie cu momente externe mai mici (ordinul I) se obþine adoptând urmãtoarea ordine de aprindere: b) ;1;1951038412276111 =σ−−−−−−−−−−−−
c) ;2;6;4;8;0 54321 δ⋅=αδ⋅=αδ⋅=αδ⋅=α°=α
;7;11
;3;;5;9;10
1211
109876
δ⋅=αδ⋅=αδ⋅=αδ=αδ⋅=αδ⋅=αδ⋅=α
e) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 4cos2
198cos2210cos
223~
xrM
( ) ( ) ( )
( ) ( )
( ) ( ) ( ) ;07cos2111cos
233cos
25
cos275cos
299cos
211
10cos2
132cos2
156cos2
17
=δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
C 1C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 92
( ) ( )
( ) ( ) ( )
( ) ( )
( ) ( ) ( ) ;07sin2111sin
233sin
25
sin275sin
299sin
211
10sin2
132sin2
156sin2
17
4sin2
198sin2210sin
223~
=δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=yrM
;0~;0;0~
=
=θ=
∗re
r
r
m
M
;0~;0
;0~;0~;0~
I
I
III
=
°=θ
===
∗a
yx
e
a
aaa
m
MMM
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
;0~;0~
;014cos2122cos
236cos
25
2cos2710cos
2918cos
211
20cos2
134cos2
1512cos2
17
8cos2
1916cos2210cos
223~
II
II
II
=
=
=δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
a
a
a
M
M
M
y
x
;0~;0
II
II
=
°=θ∗
ae
a
m
f) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 4cos5.38cos5.40cos5.5~IxiM
( ) ( ) ( ) ;010cos5.02cos5.16cos5.2 =δ⋅⋅+δ⋅⋅+δ⋅⋅+
;0~;0~II== ii MM
y
( ) ( )( ) ( )( )
.3~;0~;320cos5.0
4cos5.112cos5.2
8cos5.316cos5.40cos5.5~
IIII
II
==
=δ⋅⋅++δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
ii
i
MM
M
y
x
Soluþia prezintã caracteristici de echilibrare foarte bune. Firma Sulzer foloseºte soluþia cu caracteristicile urmãtoare: b) ;1;1512726108341191 =σ−−−−−−−−−−−−
c) ;;9;8;4;0 54321 δ=αδ⋅=αδ⋅=αδ⋅=α°=α
;2;10;6;11;7;3;5
1211
109876
δ⋅=αδ⋅=αδ⋅=αδ⋅=αδ⋅=αδ⋅=αδ⋅=α
e) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 8cos2
194cos2210cos
223~
xrM
( ) ( )+δ⋅⋅+δ⋅++δ⋅⋅+ 5cos2
13cos2
159cos2
17
( ) ( ) ( )
( ) ( ) ( ) ;02cos2110cos
236cos
25
11cos277cos
293cos
211
=δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
( ) ( )
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
;0~;0
;0~;0~;0~;0~;0
;0~;02sin
2110sin
236sin
25
11sin277sin
293sin
211
5sin2
13sin2
159sin2
17
8sin2
194sin2210sin
223~
I
I
III
o
=
°=θ
===
=
=θ
=
=δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
∗
∗
a
yx
r
y
e
a
aaa
e
r
r
r
m
MMM
m
M
M
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
;0~;0~
;04cos2120cos
2312cos
25
22cos2714cos
296cos
211
10cos2
132cos2
1518cos2
17
16cos2
198cos2210cos
223~
II
II
II
=
=
=δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
a
a
a
M
M
M
y
x
;0~;0
II
II
=
°=θ∗
ae
a
m
f) ( ) ( )+δ⋅⋅+δ⋅⋅+°⋅= 8cos5.34cos5.40cos5.5~IxiM
( ) ( );366.2
5cos5.0cos5.19cos5.2=
=δ⋅⋅+δ⋅++δ⋅⋅+
;366.2~;0~II== ii MM
y
( ) ( )( ) ( )( )
.0~;0~;010cos5.0
2cos5.118cos5.2
16cos5.38cos5.40cos5.5~
IIII
II
==
=δ⋅⋅++δ⋅⋅+δ⋅⋅+
+δ⋅⋅+δ⋅⋅+°⋅=
ii
i
MM
M
y
x
Variantele de cuplare a manivelelor sunt ilustrate prin figura 4.
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
93
Fig. 4
C 1C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 94
Din cele prezentate, se poate constata cã, odatã cu creºterea numãrului de cilindri, numãrul de variante posibile de arbori cotiþi creºte rapid. Se poate tria mai operativ soluþia de arbore cotit optimã sub aspectul echilibrãrii momentelor forþelor de inerþie, la motoarele în doi timpi cu numãr par mare de cilindri, dacã ne imaginãm cã arborii cotiþi ai acestor motoare sunt alcãtuiþi din mai mulþi arbori cotiþi cu numãr mai mic de cilindri. De exemplu, soluþia de arbore cotit al motorului în doi timpi ºi cu ordinea de aprindere
182645371 −−−−−−−− prezentatã anterior, poate fi consideratã ca fiind compusã dintr-un arbore cotit de motor cu primii patru cilindri, cu decalajul unghiular de °90 ºi un arbore cotit de motor cu urmãtorii patru cilindri, identic cu primul, dar rotit cu °45 . Figura 1,a redã aceastã suprapunere în steaua manivelelor. Reþinem ca modalitate de îmbunãtãþire a echilibrãrii momentelor forþelor de inerþie modifi-carea distanþei dintre cilindrii consecutivi, cu restric-þia impusã de obþinere a unor arbori prea lungi. Tot la motoarele cu numãr mare de cilindri, prin aceasta, se micºoreazã considerabil gradul de neuniformitate al momentului instantaneu. În aceastã situaþie, se poate renunþa la repartizarea uniformã a aprinderilor, fãrã ca gradul de neuniformitate al motorului sã fie modificat sensibil. Dar, în acest fel, se realizeazã o mai bunã echilibrare a momentelor forþelor de inerþie, deci prin adoptarea unei repartizãri parþial neuniforme a aprinderilor. Ambele soluþii sunt aplicate în construcþia arborilor cotiþi ai motoarelor navale. De exemplu firma MAN-B&W le utilizeazã chiar pentru motoare cu opt cilindri, aºa cum se indicã în continuare. Pentru motorul în doi timpi, cu opt cilindri în linie, cei doi arbori parþiali corespunzând unor motoare în doi timpi cu câte patru cilindri în linie din figura 1,b vor fi calaþi astfel încât momentul forþelor de inerþie
de ordinul I al primului arbore ( )10'~=rM sã fie
egal ºi de sens contrar cu cel al arborelui al doilea
( )10"~=rM .
Astfel, acest unghi de calare va avea valoarea '5236'261822 °=°⋅=θr . Analizând valoarea
momentelor de dezechilibru de ordinul II, se constatã cã valoarea comunã a acestora, pentru fiecare din cei doi arbori parþiali, este nulã, aºa cum s-a indicat la motorul cu patru cilindri; caracteristicile de echilibrare sunt date mai jos: b) ;1;182645371 =σ−−−−−−−−
c) ;180;270;90;0 4321 °=α°=α°=α°=α;'853;'8323;'8143;'8233 8765 °=α°=α°=α°=α
e) ;0~~~III=== aar MMM
f) ;0~;3~III== ii MM
Aºadar, rezultã un bun echilibraj al momentelor de dezechilibru extern, în timp ce valoarea momentului intern rãmâne aceeaºi. Perioada momentului motor instantaneu rezultant este de
°90 , deci aceeaºi ca ºi pentru motorul în doi timpi cu patru cilindri în linie, faþã de °45 a momentului motorului cu opt cilindri; aceasta conduce la un grad de neuniformitate a momentului rezultant mai mare. În ceea ce priveºte echilibrarea forþelor de inerþie ºi a momentelor de ruliu, conform celor analizate în 3.3.1 ºi sintetizate în tabelul 1 din paragraful respectiv, soluþia de arbore cotit de motor cu opt cilindri ºi aprinderi uniform repartizate conduce la anularea unui numãr mai mare de armonici; însã în ambele cazuri (aprinderi uniform ºi neuniform repartizate), armonicile de ordinele I ºi II ale forþelor de inerþie ale maselor în miºcare alternativã ºi ale momentului de ruliu sunt nule. Conform celor prezentate la începutul paragrafului, soluþiile optime de arbori cotiþi la motoarele în patru timpi cu numãr par de cilindri se
Fig. 1
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
95
determinã folosind pentru fiecare jumãtate a arborelui cotit soluþia cu momentele externe minime
la motorul cu 2i
cilindri în linie, în doi timpi ºi cu
aprinderile uniform repartizate.
Deoarece fiecare din primele 2i
manivele este
cuplatã în fazã cu manivela simetricã faþã de planul de simetrie, momentul extern al forþei de inerþie este complet echilibrat. De aceea, nu mai este nevoie sã se recurgã la modificarea distanþelor dintre axele cilindrilor consecutivi sau la repartizarea neuniformã a aprinderilor. Pentru motoarele în patru timpi cu numãr par de cilindri, steaua manivelelor este aceeaºi ca ºi pentru motorul în doi timpi. Deci soluþiile optime din punct de vedere al echilibrãrii pentru motorul în doi timpi cu numãr impar de cilindri vor fi optime ºi pentru motorul în patru timpi cu numãr impar de cilindri.
3.4. Echilibrarea motoarelor în V
Aºa cum s-a arãtat în paragraful 2.10.2, arborele cotit al unui motor în V cu i cilindri are configuraþia identicã cu cea a unui arbore cotit de
motor cu 2i
cilindri în linie ºi aprinderi uniform
repartizate. Dacã numãrul de cilindri ai motorului în V, în patru timpi, este multiplu de 4, arborele cotit al acestuia va fi asimilat cu arborele cotit al unui motor în patru timpi, cu cilindrii în linie, sau cu al unui motor în doi timpi, în linie. În cazul în care numãrul de cilindri nu este multiplu de 4, asimilarea se face cu arborele cotit al unui motor cu numãr impar de cilindri, în linie, în doi timpi. Reamintim cã o caracteristicã importantã a acestui tip de motoare este unghiul V-ului, definit în paragraful mai sus menþionat ºi notat γ . În cele ce urmeazã, vom considera cã mecanismele motoare sunt normal axate. Ne vom referi la soluþia bielelor alãturate, lucrãnd pe acelaºi maneton. Conform figurii 2, rezultanta armonicilor de ordinul p (unde I=p sau kp 2= , pentru mecanismul normal axat) din linia din stânga acþioneazã în planul stâng (s) ºi se noteazã
spaF ;
analog pentru cilindrul din dreapta avem dpaF .
Mãrimile acestor forþe sunt:
,2
cos ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ γ
+α= pFFpsp aa (1)
ºi
,2
cos ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ γ
−α= pFFpdp aa (2)
modulul fiind, conform 3.2.2:
( ) .2paa apRmF
pω= (3)
Rezultanta armonicilor de ordinul p are componentele pe axele Ox ºi Oy, normala la bisectoarea V-ului, cu valorile:
( )
( ),sin
sin2
sin2
sin2
2cos
2cos
2sin
α=
=α⋅⎟⎠⎞
⎜⎝⎛ γγ
=
=⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ γ
+α−⎟⎠⎞
⎜⎝⎛ γ
−α⋅γ
=
pA
ppF
ppFF
p
a
aa
p
pxp
(4) ºi
( )
( ).cos
cos2
cos2
cos2
2cos
2cos
2cos
α=
=α⎟⎠⎞
⎜⎝⎛ γγ
=
=⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ γ
+α−⎟⎠⎞
⎜⎝⎛ γ
−αγ
=
pB
ppF
ppFF
p
a
aa
p
pyp
(5) Din relaþiile (4) ºi (5) se deduce ecuaþia:
,12
2
2
2
=+p
a
p
a
B
F
A
Fypxp (6)
ceea ce permite interpretarea vectorialã a armonicilor de ordinul p pentru un motor în V:
rezpaF
este un vector rotitor de mãrime variabilã care se roteºte cu o vitezã de p ori mai mare decât a
C 1C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56
Fig. 2

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 96
arborelui cotit ºi a cãrui extremitate descrie o elipsã cu semiaxele variabile pA ºi pB .
Condiþia pp BA = revine la:
,2
cos2
cos2
sin2
sin ⎟⎠⎞
⎜⎝⎛ γγ
=⎟⎠⎞
⎜⎝⎛ γγ pp (7)
adicã:
( ) ,02
1cos =⎥⎦⎤
⎢⎣⎡ γ
+p
cu soluþiile N,112
∈π++
=γ ppm
. Pentru armonica de
ordinul I ( I=p ) avem cã 2π
=γ . Aceasta înseamnã
cã vectorul rezultant rezaF
I descrie un cerc ºi poate
fi echilibrat cu contragreutãþi. Posibilitatea echilibrãrii totale, fãrã mase de echilibrare, se exprimã prin condiþiile
0==ypxp aa FF , adicã 0== pp BA , sau:
,02
cos2
cos2
sin2
sin =⎟⎠⎞
⎜⎝⎛ γγ
=⎟⎠⎞
⎜⎝⎛ γγ pp (8)
cu soluþia π=γ ºi kp 2= , ceea ce înseamnã cã la motoarele cu cilindrii opuºi forþele de inerþie de ordin par sunt nule, subzistând numai forþa de ordinul I. În particular, putem afla ordinele armonicilor care dau componenta nulã dupã bisectoarea V-ului, punând condiþia 0=
xpaF , cu soluþia
( ) N,12∈
γπ+
= mmp , sau dupã normala la
bisectoarea V-ului, punând de aceastã datã
condiþia 0=ypaF , având soluþia N, ∈
γπ
= mmp 2.
În ceea ce priveºte echilibrarea momentelor forþelor de inerþie, se procedeazã, în principiu, ca
pentru motorul cu 2i
cilindri în linie. Se va þine
seama cã asupra motorului acþioneazã douã momente rezultante
dpaM ºi spaM cu aceeaºi
amplitudine ºi diferenþã de fazã, care depinde de unghiul V-ului ºi în plane care se intersecteazã. Vom urmãri, pentru simplificare, anularea momentelor rezultante din fiecare linie ºi nu anularea momentului rezultant total. În continuare, pentru motorul în V, în patru timpi, cu opt cilindri, la care variantele de ordine de aprindere s-au stabilit la 2.10.2., vom face analiza echilibrãrii. Aºa cum s-a arãtat, pentru 8=i existã posibilitatea adoptãrii soluþiei de arbore cotit de motor în patru timpi, cu manivelele în fazã sau a
soluþiei de arbore cotit de motor în doi timpi, cu manivelele în opoziþie, ambele cu patru cilindri. Precizãm unghiul V-ului °=γ 90 . Prima soluþie prezintã dezavantajul cel mai important, adicã 0
2≠
kaF ºi 0I=aF (conform
rezultatelor sintetizate în tabelul 1, paragraful 3.3.1). Soluþia a doua lasã neechilibrate armonicile de ordin multiplu de 4. Din punct de vedere al forþelor de inerþie ale maselor în miºcare de rotaþie, 0=rF , în ambele cazuri, prima realizând ºi o anulare a momentelor
rM , spre deosebire de a doua (rezultat specific motorului în doi timpi). Ambele soluþii anuleazã armonicile de acelaºi ordin pe direcþiile bisectoarei V-ului ºi normalei la aceasta,
xpaF ºi ypaF .
Prima soluþie echilibreazã ºi momentul extern de ordinul I, spre deosebire de a doua. De cele mai multe ori, aceasta din urmã este preferatã, deoarece anuleazã un numãr mai mare de armonici. Deoarece vectorii rotitori care interpreteazã armonicile de ordinul I sunt în fazã cu
manivelele ⎟⎠⎞
⎜⎝⎛ π
=γ2
, momentul rezultant pe o linie
se obþine ca ºi momentul forþelor rF . Schema de echilibrare este de tipul celei din figura de la 3.3.2.1. Avem, conform celor expuse în paragraful 3.3.3, cã:
10~~I== ar MM ºi .'2618
I°=θ=θ ar
Echilibrarea momentelor rM ºi
IaM se va face
simultan, cu o masã relativã:
,103
10~~~∗∗
∗∗∗
ρ⋅⋅+
ρ⋅
++⋅⋅
=+=Iar
Iareem
eeeR
laR
hlaammm
în care se impun condiþiile ∗∗ ρ=ρ
Iar ee ºi
hlal m ++⋅= 3 ‚ semnificaþia lui l fiind datã în figura corespunzãtoare din 3.2.3.2. Deci:
.102 ∗∗
ρ⋅⋅=
ee
Rlam
3.5. Echilibrarea motoarelor cu pistoane opuse
Vom considera motorul cu pistoane opuse ºi cu doi arbori cotiþi, a cãrui cinematicã s-a studiat în paragraful 1.3.1. Schema pentru determinarea momentelor de dezechilibru este redatã în figura 3, determinatã pe baza figurii corespunzãtoare din paragraful 1.3.1. Dacã cei doi arbori cotiþi ar fi calaþi în fazã, datoritã faptului cã cele douã mecanisme sunt
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
97
decalate cu °180 , toate componentele armonice ale forþelor de inerþie se echilibreazã, pentru fiecare cilindru în care acþioneazã câte o pereche de pistoane opuse. Aºa cum s-a arãtat însã, pentru asigurarea distribuþiei s-a impus defazajul între cei doi arbori cotiþi ( )RAC°÷=ϕ 75 , ceea ce face ca vectorii ce interpreteazã forþele de inerþie sã nu mai fie strict în opoziþie; valoarea rezultantei normale se considerã însã nesemnificativã. În ceea ce priveºte momentele externe de ordinul p, vom avea, pentru cei doi arbori, þinând cont de relaþia:
ϕ+α=α 21 , componentele:
( )∑=
ϕ+α=i
jpjaa jpxp
paFM1
1cos1
, (9)
( )[ ]∑=
ϕ−ϕ−α−π=i
jpjaa jpxp
paFM1
1cos2
, (10)
respectiv:
( )∑=
ϕ+α=i
jpjaa jpyp
paFM1
1 ,sin1
(11)
( )[ ]∑=
ϕ−ϕ−α−π=i
jpjaa jpyp
paFM1
1sin2
. (12)
Rezultantele pe cele douã axe vor fi:
∑=
⎟⎠⎞
⎜⎝⎛ ϕ+
ϕ−α
ϕ−=
=+=
i
jpja
aaa
ppapF
MMM
jp
xpxpxp
11 ,
2cos
2sin2
21
(13)
∑=
⎟⎠⎞
⎜⎝⎛ ϕ+
ϕ−α
ϕ=
=+=
i
jpja
aaa
ppapF
MMM
jp
ypypyp
11 .
2sin
2sin2
21
(14) Valorile menþionate pentru momentul rezultant,
prin factorul 2
sin2 ϕp, fac ca momentele
yII,IaM sã
aibã valori între 2.01.0 − din valoarea momentelor pentru un singur arbore. În general nu se aplicã pentru acest tip de motor soluþii de echilibrare speciale.
C 1C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56
Fig. 3
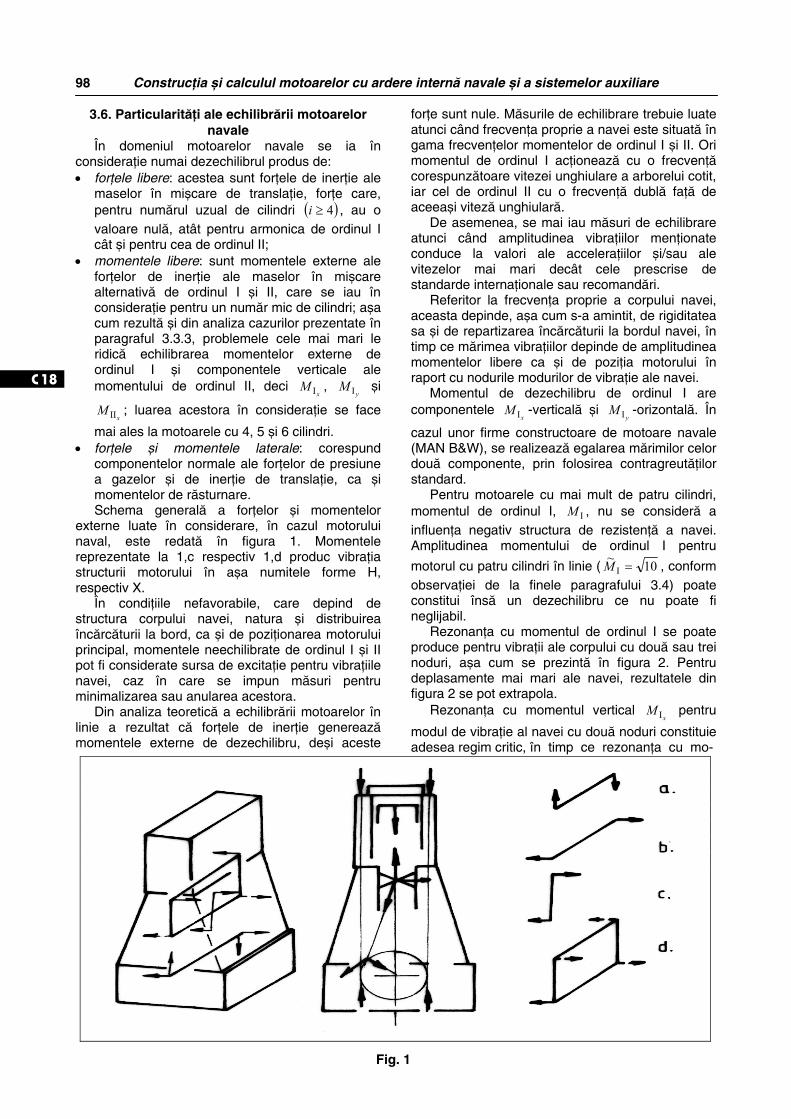
Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 98
3.6. Particularitãþi ale echilibrãrii motoarelor navale
În domeniul motoarelor navale se ia în consideraþie numai dezechilibrul produs de: • forþele libere: acestea sunt forþele de inerþie ale
maselor în miºcare de translaþie, forþe care, pentru numãrul uzual de cilindri ( )4≥i , au o valoare nulã, atât pentru armonica de ordinul I cât ºi pentru cea de ordinul II;
• momentele libere: sunt momentele externe ale forþelor de inerþie ale maselor în miºcare alternativã de ordinul I ºi II, care se iau în consideraþie pentru un numãr mic de cilindri; aºa cum rezultã ºi din analiza cazurilor prezentate în paragraful 3.3.3, problemele cele mai mari le ridicã echilibrarea momentelor externe de ordinul I ºi componentele verticale ale momentului de ordinul II, deci
xM I ,
yM I ºi
xM II ; luarea acestora în consideraþie se face
mai ales la motoarele cu 4, 5 ºi 6 cilindri. • forþele ºi momentele laterale: corespund
componentelor normale ale forþelor de presiune a gazelor ºi de inerþie de translaþie, ca ºi momentelor de rãsturnare.
Schema generalã a forþelor ºi momentelor externe luate în considerare, în cazul motorului naval, este redatã în figura 1. Momentele reprezentate la 1,c respectiv 1,d produc vibraþia structurii motorului în aºa numitele forme H, respectiv X. În condiþiile nefavorabile, care depind de structura corpului navei, natura ºi distribuirea încãrcãturii la bord, ca ºi de poziþionarea motorului principal, momentele neechilibrate de ordinul I ºi II pot fi considerate sursa de excitaþie pentru vibraþiile navei, caz în care se impun mãsuri pentru minimalizarea sau anularea acestora. Din analiza teoreticã a echilibrãrii motoarelor în linie a rezultat cã forþele de inerþie genereazã momentele externe de dezechilibru, deºi aceste
forþe sunt nule. Mãsurile de echilibrare trebuie luate atunci când frecvenþa proprie a navei este situatã în gama frecvenþelor momentelor de ordinul I ºi II. Ori momentul de ordinul I acþioneazã cu o frecvenþã corespunzãtoare vitezei unghiulare a arborelui cotit, iar cel de ordinul II cu o frecvenþã dublã faþã de aceeaºi vitezã unghiularã. De asemenea, se mai iau mãsuri de echilibrare atunci când amplitudinea vibraþiilor menþionate conduce la valori ale acceleraþiilor ºi/sau ale vitezelor mai mari decât cele prescrise de standarde internaþionale sau recomandãri. Referitor la frecvenþa proprie a corpului navei, aceasta depinde, aºa cum s-a amintit, de rigiditatea sa ºi de repartizarea încãrcãturii la bordul navei, în timp ce mãrimea vibraþiilor depinde de amplitudinea momentelor libere ca ºi de poziþia motorului în raport cu nodurile modurilor de vibraþie ale navei. Momentul de dezechilibru de ordinul I are componentele
xM I -verticalã ºi
yM I -orizontalã. În
cazul unor firme constructoare de motoare navale (MAN B&W), se realizeazã egalarea mãrimilor celor douã componente, prin folosirea contragreutãþilor standard. Pentru motoarele cu mai mult de patru cilindri, momentul de ordinul I, IM , nu se considerã a influenþa negativ structura de rezistenþã a navei. Amplitudinea momentului de ordinul I pentru
motorul cu patru cilindri în linie ( 10~I =M , conform
observaþiei de la finele paragrafului 3.4) poate constitui însã un dezechilibru ce nu poate fi neglijabil. Rezonanþa cu momentul de ordinul I se poate produce pentru vibraþii ale corpului cu douã sau trei noduri, aºa cum se prezintã în figura 2. Pentru deplasamente mai mari ale navei, rezultatele din figura 2 se pot extrapola. Rezonanþa cu momentul vertical
xM I pentru
modul de vibraþie al navei cu douã noduri constituie adesea regim critic, în timp ce rezonanþa cu mo-
Fig. 1
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
99
mentul orizontal se poate produce la viteze de rotaþie ale arborelui cotit al motorului mai mari decât cea nominalã, din cauza valorii mai mari ºi a frecvenþei proprii a vibraþiilor orizontale ale navei. În mod uzual motoarele principale lente în doi timpi, cu patru cilindri sunt dotate cu contragreutãþi
reglabile, aºa cum se ilustreazã în figura 3. Aceste sisteme de echilibrare pot reduce momentul vertical la o valoare nesemnificativã (deºi, simultan, se realizeazã o creºtere a momentului orizontal), astfel încât problema echilibrãrii momentului IM se considerã rezolvatã. Menþionãm cã existã ºi
Fig. 2
Fig. 3
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1
C 18 C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 100
posibilitatea unei soluþii cu moment orizontal nul. În cazuri rare, atunci când momentul de ordinul I cauzeazã rezonanþa atât cu vibraþiile verticale cât ºi cu cele orizontale ale navei, în gama turaþiilor de lucru ale motorului, momentul orizontal
yM I poate
fi atenuat sau chiar anulat, printr-un dispozitiv format din douã mase de echilibrare care se rotesc cu viteza unghiularã a arborelui cotit, aºa cum se ilustreazã în figura 4. Componentele verticale ale forþelor centrifuge de inerþie ale celor douã mase se anuleazã reciproc, în timp ce componentele orizontale dau o rezultantã
cF1 , care, multiplicatã
prin distanþa de la suportul sau pânã la primul nod din pupa al modului de vibraþie al navei, L, dã un moment compensator egal cu LFM
cc⋅= 11 , care
poate fi mai mic sau egal cu y
M I , producând
reducerea, respectiv anularea acestuia din urmã. Pentru cã rezonanþa cu ambele moduri, orizontal ºi vertical, de vibraþie a navei se produce rar, în general, motoarele principale navale nu sunt dotate cu astfel de dispozitive de compensare simultanã. În construcþia motoarelor navale se iau în consideraþie, referitor la momentul extern al armonicilor de ordinul II, numai componenta verticalã
xM II , aºa cum s-a arãtat anterior, iar
aceasta în mod predilect la motoarele cu 4, 5 ºi 6 cilindri. Rezonanþa cu momentul de ordinul II se poate produce la vibraþiile navei cu patru sau cinci noduri, fapt ilustrat de figura 5 pentru motoarele seriei MC, unde se dã frecvenþa momentului de ordinul II pentru diverse tipuri de motoare, þinând cont cã aceasta este dublã faþã de viteza unghiularã a motorului. Spre deosebire de calculul frecvenþelor proprii cu douã sau trei noduri, metodele de calcul al frecvenþelor proprii ale navei cu patru sau cinci noduri sunt explicite, dar, în ciuda complexitãþii, rezultatele nu se bucurã de o exactitate prea mare. Dispozitivele de compensare-echilibrare a momentului de ordinul II se compun din douã mase ce se rotesc cu vitezã dublã faþã de cea a arborelui cotit. Sunt situaþii în care motorul naval este livrat
cu un asemenea dispozitiv, încorporat în construcþia sa, sau care poate fi montat ulterior. Soluþii pentru echilibrarea momentului de ordinul II, ilustrate în figura 6, pot fi urmãtoarele: a) atunci când se cunosc frecvenþele proprii,
punctele nodale ale modurilor de vibraþie ºi mãrimea momentului de ordinul II, nu se folosesc dispozitive suplimentare de echilibrare;
b) compensator montat la partea dinspre pupa a motorului, acþionat de lanþul principal de antrenare (fig. 6,a);
c) compensator montat în partea dinspre prova a motorului, acþionat de arborele cotit printr-un lanþ de antrenare separat (fig. 6,b);
d) compensatori montaþi la ambele capete ale motorului, realizându-se echilibrarea totalã a momentului de ordinul II.
Rezultã cã dispozitivele de compensare menþionate la punctele b) ºi c), poziþionate într-un nod sau în apropierea acestuia vor fi neeficace; deci soluþia din fig. 6, a ºi b nu va fi suficientã, rãmânând a fi luatã în considerare soluþia d). O decizie cu privire la aspectele dezechilibrãrii motoarelor navale ºi posibilitatea utilizãrii compensatorilor va putea fi luatã doar în condiþiile reale ale exploatãrii motorului. Dacã nu se cunosc date referitoare la dezechilibre ºi modurile de vi-braþie ale unei nave surori, date care constituie ba-
Fig. 4
Fig. 5
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
101
za luãrii unor decizii cu privire la montarea dispozitivelor de echilibrare, se recomandã efectuarea unor calcule pentru determinarea uneia din situaþiile a), b), c)‚ sau d). De asemenea, mãsurãtorile efectuate în timpul probelor de mare, sau ulterior, în timpul serviciului ºi cu încãrcare maximã a navei, vor fi în mãsurã sã informeze asupra montãrii dispozitivelor respective. Dacã iniþial s-a decis sã nu se monteze asemenea compensatori ºi, totodatã, nici motorul nu este apt pentru montare ulterioarã, se pot folosi compensatori acþionaþi electric, corect sincronizaþi din punct de vedere al fazei, relativ la momentele libere, pentru a neutraliza excitaþia. Un astfel de dispozitiv se monteazã, de obicei, în compartimentul maºina cârmei, unde elongaþiile sunt mai mari, deci ºi efectul compensatorului este maxim. Deºi mai eficace, un astfel de dispozitiv de compensare este mai scump. Un numãr de câteva zeci de astfel de dispozitive se aflã actualmente în serviciu, cu bune rezultate. Pentru evaluarea riscurilor de excitaþie a vibraþiilor corpului de cãtre momentele de ordinul I ºi II, se introduce mãrimea:
[ ]kWkNmP
MM
e
III,III,
~=∗ (1)
care exprimã momentul extern relativ, eP fiind puterea efectivã a motorului. Prin intermediul lui
∗III,
~M este posibilã, pe baza experienþei de
exploatare a unui numãr mare de nave, echipate cu motoare de tipuri diferite ºi cu numãr de cilindri diferit, estimarea riscurilor vibraþiilor corpului excitate de tipul respectiv de motor, aºa cum reiese din tabelul 1.
Tabelul 1
[ ]kWkNmM 3II,I 10~ −∗ Necesitatea compensatorilor
600 ÷ Mãrime nerelevamtã a lui ∗aM
~
12060 ÷ Nu este nevoie 220120 ÷ De dorit
peste 220 Necesar
Deºi dispozitivele mecanice de echilibrare incumbã complicaþii constructive ºi tehnologice, motoarele navale produse de firma Sulzer, în ultimul timp, sunt echipate cu mase de echilibrare ce realizeazã fie numai echilibrarea momentului extern de ordinul I, fie echilibrarea simultanã a momentelor de ordinul I ºi II, schemele principale de echilibrare fiind redate în figura 7,a, respectiv b.
Fig. 6
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1
C 18 C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 102
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56
Fig. 7
Fig. 8

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
103
Un dispozitiv de echilibrare (de tip Lanchester), folosit pentru echilibrarea momentelor libere ale motoarelor Sulzer din seria RTA, pentru numãr de cilindri de la 4 la 6, este reprezentat în figura 8. Cu privire la aceste mase de echilibrare a momentelor libere, acestea se dimensioneazã cu re- laþii de calcul de tipul celor prezentate în paragraful 3.3; aceste relaþii conþin însã ca necunoscutã ºi distanþa de la axa de rotaþie a masei la centrul de greutate al acesteia, deci practic necunoscuta este produsul de forma ∗∗ ρeem . Din motive de gabarite ºi greutãþi, la motoarele navale nu se face dimensionarea astfel încât prin cuplul ( )∗∗ ρeem , sã se realizeze echilibrarea totalã a momentelor externe. De cele mai multe ori, compensarea parþialã a acestora se considerã satisfãcãtoare. Vom da în continuare, în tabelul 2, valorile calculate ale momentelor de dezechilibru
xyxMMM IIII ,, pentru motorul Sulzer RTA58, ca ºi
valorile momentelor rãmase necompensate prin folosirea dispozitivelor cu contragreutãþi. Din examinarea valorilor din tabelul 2, se poate constata scãderea mãrimii momentelor prin folosirea dispozitivelor de echilibrare specificate. Uneori însã, se poate vedea creºterea momentului faþã de valoarea calculatã, deºi se folosesc compensatori, aplicaþia constând în dorinþa de a aduce la valori apropiate cele douã componente de ordinul I, caz care corespunde figurii 3,c. Pentru motoarele navale trebuie luat în consideraþie ºi dezechilibrul produs de forþele ºi momentele laterale. Momentele laterale sunt momente de rãsturnare (ruliu) ale forþelor de presiune a gazelor ºi de inerþie ale maselor în miºcare de translaþie. Valoarea acestora depinde de numãrul de cilindri ºi de ordinea de aprindere. Generalizând relaþia, care dã valoarea momentului de ordinul k pentru un cilindru (paragraful 3.2.3), putem scrie, pentru cilindrul de ordinul j, în care aprinderea se produce dupã ( )1−j decalaje un-
ghiulare faþã de cilindrul 1, valoarea momentului de ruliu de ordin k:
( )[ ]{ } .,1,1sin ijjkMM krasras kjk=ϕ+δ−−α= (2)
În ipoteza uniformitãþii aprinderilor ºi a mecanismelor motoare identice pentru toþi cilindrii, momentul de rãsturnare rezultant, conform paragrafului 3.1, va fi:
( )[ ]{ }∑=
ϕ+δ−−α=i
jkrasras jkMM
kjk1
1sin . (3)
Forþa lateralã de dezechilibru este dedusã din observaþia cã momentul armonic de ruliu de ordinul k‚ poate fi considerat ºi ca efectul unei forþe laterale, armonic variabile:
( )[ ]{ }∑=
ϕ+δ−−α==i
jk
rasrasras jk
H
M
H
MF kk
k1
1sin , (4)
care ar acþiona perpendicular pe planul cilindrilor, la extremitatea structurii de rezistenþã a motorului, la distanþa H faþã de axa de rotaþie (figura 9). Forþele ºi momentele laterale se transmit structurii de rezistenþã a motorului ºi pot provoca vibraþii în forma H (cauza fiind
krasF ) sau în forma X
(datoritã momentului krasM ), aºa cum reiese din
figura 10,a, respectiv figura 10,b. De aici apare posibilitatea rezonanþei cu corpul navei sau a vibraþiilor locale în compartimentul maºinilor. Amplitudinile vibraþiilor transmise corpului depind de fundaþia motorului, rigiditatea carterului ºi a îmbinãrilor pe tubulatura de evacuare. Neputând fi determinate, de obicei, cu acurateþe absolutã, se va prevedea, încã din fazele de proiectare a compartimentului maºini cu motoare cu 4, 5, 6, 8 ºi 12 cilindri, instalarea unor traverse laterale de rigidizare a motorului.
Tabelul 2Momente de ordinul I [kNm] Momente de ordinul II [kNm]
Valori remanente Valori remanente
Valori calculate Cu contra-
greutãþi standard
Cu contra greutãþi reglabile
Cu dispo-zitiv Lan-
chester, fig. 8
Valori calculate Fãrã dispozitivul din
fig. 8
Cu dispozitivul din fig. 8
Nr.
cili
nd
ri
Tu
raþi
a [r
ot/
min
]
xIM yIM
xIM
yIM
xIM
yIM
xIM
yIM
xIIM yIIM
xIIM yIIM
4 1820 606 529 556 31 1115 0 0 0 0 1003 11
5 160 220 168 176 718 233 1249 47
6 0 0 0 0 455 263 869 8
7 70 146 101 104 119 95 252
8 208 502 337 351 0 0 0
9
127
550 97 345 184
Nu
nece
sitã
di
spoz
itiv
de
echi
libra
re c
u co
ntra
-gre
utãþ
i re
glab
ile
Nu
nece
sitã
di
spoz
itiv
Lan-
ches
ter
59 161 283
Nu
nece
si-
tã
disp
oz-
itiv
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1
C 18 C 1C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 104
În dorinþa de a amortiza sau de a modifica frecvenþa proprie a vibraþiilor cauzate de dezechilibrul lateral, se vor instala traverse laterale atunci când este posibil ca rezonanþa sã aparã în gama frecvenþelor de lucru ale motorului. Asemenea traverse vor fi de tip hidraulic, deoarece acestea sunt adaptabile la deformaþiile corpului navei ºi variaþia forþei lor de pretensionare datorate unor miºcãri relativ uºoare (operaþiunile de încãrcare-descãrcare a navei) este neglijabilã. Schema de amplasare (mono- sau bilateralã) a traverselor hidraulice este redatã în figura 11. În tabelul 3 se dau valorile forþelor ºi momentelor laterale calculate pe baza relaþiilor (3) ºi (4) ºi a analizei armonice prezentate în paragraful 3.2.3, pentru motorul Sulzer RTA58.
Tabelul 3Ordinul armonic
1 2 3 4 5 6
Nr.
ci
lindr
i
[ ]kNFras
[ ]mkNMras
⋅
[ ]kNFras
[ ]mkNMras
⋅
[ ]kNFras
[ ]mkNMras
⋅
[ ]kNFras [ ]mkN
Mras⋅
[ ]kNFras [ ]mkN
Mras⋅
[ ]kNFras [ ]mkN
Mras⋅
4 0 147 0 84.6 0 34.8 138 0 0 29.7 0 49.9 5 0 46.6 0 105 0 122 0 14.1 115 0 0 5,6 6 0 0 0 73.3 0 221 0 109 0 0 82.2 0 7 0 27.8 0 21.3 0 242 0 309 0 21.1 0 3.3 8 0 93.1 0 0 0 310 0 126 0 265 0 0 9 0 95.7 0 23.9 0 383 0 157 0 105 0 194
Fig. 9
Fig. 10
Fig. 11
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56
Fig. 11

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
105
4. Construcþia ºi calculul pistonului Pistonul este organul mobil ce asigurã evoluþiile fluidului motor necesare producerii lucrului mecanic, piesele care concurã la miºcarea acestuia (segmenþi ºi bolþ la M4t, respectiv segmenþi, tija pistonului ºi capul de cruce la M2t) constituindu-se, împreunã cu pistonul, în ceea ce se numeºte grupul piston, ele asigurând montarea ºi funcþionarea organului respectiv.
4.1. Rol funcþional • asigurã transmiterea forþei de presiune a gazelor
bielei; • asigurã transmiterea componentei normale
produse de bielã cãtre cãmaºa cilindrului; • prin intermediul segmenþilor, asigurã dubla
etanºare a cilindrului de carter (împiedicã scãparea gazelor din cilindru în carter, precum ºi pãtrunderea uleiului de ungere de pe cãmaºa cilindrului înspre camera de ardere);
• preia o parte din energia degajatã în urma arderii combustibilului, din care o parte o transmite prin intermediul segmenþilor la cãmaºã, iar restul o transmite bolþului, bielei precum ºi agentului de rãcire (apã tehnicã, ulei);
• suplimentar mai îndeplineºte funcþiile: • la motoarele în doi timpi este ºi organ de
distribuþie; • la unele motoare în doi timpi este ºi pompã
de baleiaj (seria Sulzer RD); • prin forma capului sãu, poate conþine
parþial sau total camera de ardere; • tot prin forma capului sãu, asigurã
organizarea unor miºcãri dirijate a gazelor în cilindru.
4.2. Materiale
Materialul cel mai utilizat este fonta, care are calitãþi antifricþiune mai ridicate, datorate conþinutului de grafit pe care îl posedã.
La motoarele în doi timpi este întâlnitã foarte
des ºi soluþia cu cap ºi manta separatã; la motoarele cu diametrul pistonului mai mare de 500 mm se utilizeazã oþel pentru fabricarea capului pistonului ºi fontã aliatã (Cu, Ni, Mn), pentru manta.
La motoarele în patru timpi: • pentru diametre mai mari de 400 mm se
utilizeazã oþel pentru capul pistonului ºi aliaj de aluminiu pentru manta.
• pentru diametre mai mici decât 300÷400 mm se foloseºte o construcþie unitarã din aliaj de aluminiu cu Si, Cu. Materialele utilizate la fabricarea pistoanelor
navale trebuie sã îndeplineascã urmãtoarele condiþii: • rezistenþã deosebitã la funcþionarea în condiþii
de temperaturi ridicate ºi sarcini variabile; • densitate redusã, pentru a se reduce forþele de
inerþie; • coeficient de dilatare redus, pentru ca jocurile sã
fie reduse; • coeficient de conductivitate termicã redus; • calitãþi antifricþiune deosebite, în vederea
asigurãrii regimului de ungere necesar; • posibilitate de prelucrare uºoarã (turnare,
matriþare, prelucrare prin aºchiere); • rezistenþã mare la coroziune; • cost redus.
4.3. Tehnologie de fabricaþie Fonta se toarnã în cochilii; aluminiul se toarnã
sau se forjeazã în matriþe. Dupã turnare va urma tratamentul de detensionare. În unele cazuri se poate aplica pe capul pistonului un strat de 32OAl , acest proces purtând denumirea de eloxare, apoi se mai aplicã un strat de crom poros pentru a se îmbunãtãþi calitãþile antifricþiune. Pentru aducerea la cote se prelucreazã prin aºchiere, ºi apoi se echilibreazã.
4.4. Soluþii constructive Soluþia constructivã aleasã trebuie sã corespundã rolului funcþional al motorului, solicitãrilor ºi destinaþiei specifice a acestuia.
Fig. 1
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1
C 18 C 19
C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 106
Pãrþile componente ale pistonului sunt redate în figura 1: capul, care vine în contact cu gazele din cilindru; regiunea port-segmenþi, cuprinzând mai multe canale circulare în care se monteazã segmenþii; mantaua, care ghideazã pistonul în cilindru; umerii pistonului, numiþi ºi locaºurile bolþului (fig. 1,a); distanþa de la capul pistonului la axa orificiilor din umeri se numeºte înãlþimea de comprimare. În cazul în care existã cap de cruce, pistonul nu are umeri (fig. 1,b). Capul pistonului trebuie sã asigure rezistenþa necesarã ºi buna desfãºurare a proceselor funcþionale. La MAC, forma capului pistonului depinde de organizarea camerei de ardere; dacã aceasta este divizatã, se utilizeazã cap plan, dar pentru stimularea arderii, se recurge la soluþia de piston cu cap profilat, aºa cum se indicã în figura 2: cap profilat dupã forma jetului fig. 2,a, cu camerã de ardere cupã (fig. 2,b), cu camerã de ardere toroidalã, la care suprafaþa frontalã constituie un prag ce expulzeazã aerul comprimat spre combustibilul injectat în cavitate (fig. 2,c), cu camera de ardere sfericã, folositã la motoarele cu formare pelicularã a amestecului (fig. 2,d). La MAC cu injecþie directã, se amelioreazã condiþiile de funcþionare ale capului, de exemplu prin rotunjirea sau teºirea muchiei camerei de ardere (fig. 3, a, respectiv fig. 3,b), sau se utilizeazã inele, inserþii sau acoperiri protectoare, cele mai moderne soluþii fiind acelea de utilizarea a materialelor ceramice, ceea ce conferã o rezistenþã termicã deosebitã. Regiunea port-segmenþi are forma de manºon solidar cu capul pistonului. Zona de deasupra canalului primului segment ºi cele dintre canalele segmenþilor se prelucreazã la diametre diferite, care cresc în sensul reducerii temperaturii (de la capul pistonului spre manta), pentru a realiza jocurile corespunzãtoare evitãrii gripãrii ºi limitãrii scãpãrilor.
Pentru a evita supraîncãlzirea primului segment, se adoptã diferite mãsuri, cum ar fi aceea de mãrire a distanþei de plasare a primului segment (segment de foc) faþã de capul pistonului, ceea ce conduce însã la creºterea grosimii capului pistonului; dar utilizarea rãcirii cu agent rãcitor, vehiculat pe partea interioarã a capului pistonului la MAC-uri, a condus la reducerea dezavantajului menþionat anterior. Uzual, distanþele dintre canalele segmenþilor sunt egale, mai mari la MAC, canalele fiind racordate cu brâurile dintre ele, pentru a evita ruperea acestora; la aceste motoare, canalele care susþin segmenþii comunicã prin orificii cu spaþiul din interiorul pistonului, prin care se transmite uleiul colectat; uneori se prevãd orificii ºi sub canalul port-segment (fig. 4, a), o soluþie care permite reducerea numãrului de orificii constând în plasarea acestora tangent la flancul inferior canalului (fig. 4,b). Pentru creºterea durabilitãþii canalelor, se evitã uzarea acestora prin practicarea unor inserþii din fontã austeniticã sau din aliaj de oþel în canalul primului segment. Mantaua (fusta) pistonului continuã forma de manºon a regiunii port-segmenþi ºi execuþia care asigurã scãderea jocului în cilindru spre muchia inferioarã. În vederea reducerii dilatãrii importante provocate de surplusul de material din dreptul umerilor pistonului ºi deformarea datoratã forþei normale N , mantaua se evazeazã pe sectoare ne-
Fig. 2
Fig. 3
Fig. 4
Fig. 5
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17
C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56
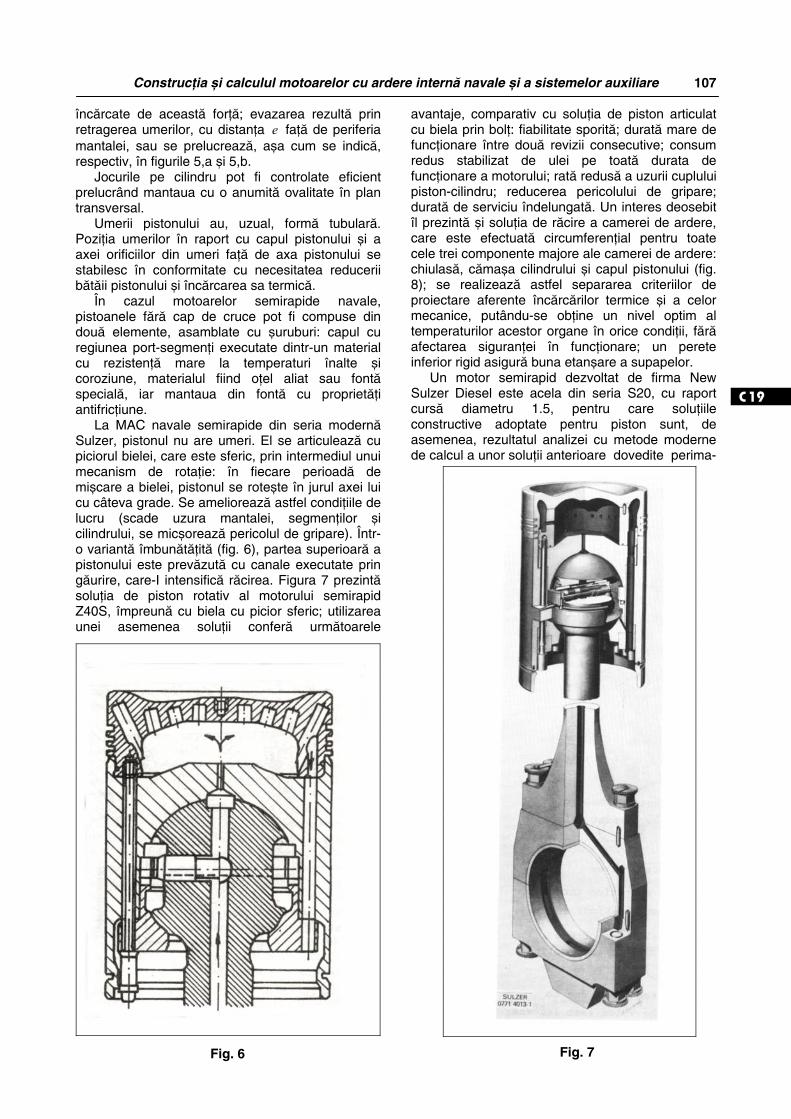
Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
107
încãrcate de aceastã forþã; evazarea rezultã prin retragerea umerilor, cu distanþa e faþã de periferia mantalei, sau se prelucreazã, aºa cum se indicã, respectiv, în figurile 5,a ºi 5,b. Jocurile pe cilindru pot fi controlate eficient prelucrând mantaua cu o anumitã ovalitate în plan transversal. Umerii pistonului au, uzual, formã tubularã. Poziþia umerilor în raport cu capul pistonului ºi a axei orificiilor din umeri faþã de axa pistonului se stabilesc în conformitate cu necesitatea reducerii bãtãii pistonului ºi încãrcarea sa termicã. În cazul motoarelor semirapide navale, pistoanele fãrã cap de cruce pot fi compuse din douã elemente, asamblate cu ºuruburi: capul cu regiunea port-segmenþi executate dintr-un material cu rezistenþã mare la temperaturi înalte ºi coroziune, materialul fiind oþel aliat sau fontã specialã, iar mantaua din fontã cu proprietãþi antifricþiune. La MAC navale semirapide din seria modernã Sulzer, pistonul nu are umeri. El se articuleazã cu piciorul bielei, care este sferic, prin intermediul unui mecanism de rotaþie: în fiecare perioadã de miºcare a bielei, pistonul se roteºte în jurul axei lui cu câteva grade. Se amelioreazã astfel condiþiile de lucru (scade uzura mantalei, segmenþilor ºi cilindrului, se micºoreazã pericolul de gripare). Într-o variantã îmbunãtãþitã (fig. 6), partea superioarã a pistonului este prevãzutã cu canale executate prin gãurire, care-I intensificã rãcirea. Figura 7 prezintã soluþia de piston rotativ al motorului semirapid Z40S, împreunã cu biela cu picior sferic; utilizarea unei asemenea soluþii conferã urmãtoarele
avantaje, comparativ cu soluþia de piston articulat cu biela prin bolþ: fiabilitate sporitã; duratã mare de funcþionare între douã revizii consecutive; consum redus stabilizat de ulei pe toatã durata de funcþionare a motorului; ratã redusã a uzurii cuplului piston-cilindru; reducerea pericolului de gripare; duratã de serviciu îndelungatã. Un interes deosebit îl prezintã ºi soluþia de rãcire a camerei de ardere, care este efectuatã circumferenþial pentru toate cele trei componente majore ale camerei de ardere: chiulasã, cãmaºa cilindrului ºi capul pistonului (fig. 8); se realizeazã astfel separarea criteriilor de proiectare aferente încãrcãrilor termice ºi a celor mecanice, putându-se obþine un nivel optim al temperaturilor acestor organe în orice condiþii, fãrã afectarea siguranþei în funcþionare; un perete inferior rigid asigurã buna etanºare a supapelor. Un motor semirapid dezvoltat de firma New Sulzer Diesel este acela din seria S20, cu raport cursã diametru 1.5, pentru care soluþiile constructive adoptate pentru piston sunt, de asemenea, rezultatul analizei cu metode moderne de calcul a unor soluþii anterioare dovedite perima-
Sulzer ZA40S-Schnid fig. 3
Fig. 6 Fig. 7
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1
C 18 C 19
C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 108
te. Astfel, pistonul este alcãtuit din douã pãrþi, anume din cap complet rãcit circumferenþial, ca la motorul în doi timpi, confecþionat din aliaj de oþel ºi manta din fontã (fig. 9). Capul pistonului este rãcit prin intermediul efectului agitator al lubrifiantului (sistemul shaker), drept urmare arhitectura capului pistonului este proiectatã cu racordãri largi corespunzãtor presiunilor mari de ardere obþinute în cilindru, permiþând ºi atingerea unui nivel al temperaturilor propice pentru funcþionarea pe combustibil greu (fig. 10); în continuare, mantaua pistonului confecþionatã din fontã permite jocuri mici cãmaºã-piston, asigurând buna funcþionare pe întregul domeniu de regimuri ale motorului.
Rezultatele optimizãrii obþinute prin modelarea ºi analiza unor soluþii performante de pistoane aferente motoarelor navale, urmate de teste de validare au fost aplicate ºi de alte firme constructoare de motoare navale. De exemplu, firma MAN B&W a menþinut, pe o perioadã lungã de timp, soluþia de piston monobloc pentru motoare semirapide, confecþionate din fontã cenuºie nodularã, care a permis atingerea unor presiuni maxime de ardere de pânã la 16000 kN/m2. Soluþia nu s-a mai dovedit însã viabilã pentru necesitãþile de putere sporitã, care au impus atingerea unei presiuni maxime în camera de ardere de aproximativ 20000 kN/m2; s-a proiectat ºi în acest caz un piston rotativ, cu o soluþie îmbunãtãþitã de articulare prin picior sferic al bielei, având o structurã compusã: cap al pistonului din oþel, cu o soluþie de rãcire asemãnãtoare cu cea descrisã anterior, ºi manta din fontã (fig. 11, pentru motorul L27/38). O soluþie asemãnãtoare practicã ºi firma Wärtsilä Vasa, pentru motorul naval semirapid V32 (fig. 12), pentru care o secþiune este prezentatã în figura 13. Pistoanele motoarelor cu cap de cruce cuprind mai multe pãrþi, confecþionate din materiale diferite, pentru ca diverse proprietãþi ale acestora sã fie valorificate corespunzãtor încãrcãrilor importante preluate; construcþia pistonului este reclamatã ºi de obligativitatea rãcirii lui forþate.
Sulzer ZA40S-Schnid fig. 4
MAN L27/38
Sulzer S20-Eckert fig. 31
Fig. 8
Fig. 10
Fig. 9 Fig. 11
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17
C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
109
O primã variantã de piston (fig. 14) are partea superioarã din oþel aliat ºi mantaua din fontã; mantaua este prevãzutã cu cordoane de bronz 2, pentru ameliorarea frecãrii, mãsurã care se impune mai ales când mantaua este înaltã, pentru a menþine închise ferestrele de baleiaj la p.m.e.; întrucât rolul de a ghida miºcarea pistonului revine capului de cruce, pistonul se monteazã cu joc relativ mare în cilindru, ceea ce diminueazã uzurile ºi posibilitatea de gripare. Tija pistonului este prinsã de regiunea port-segmenþi cu ºuruburi alungite, elastice. Aceleaºi ºuruburi servesc ºi la asamblarea componentelor pistonului, conferind simplitate fabricaþiei, dar ºi libertate sporitã de dilatare a mantalei. Prinderea tijei pistonului ºi configuraþia capului ei superior permite transmiterea ºi evacuarea uleiului de rãcire forþatã pe la exteriorul ºi, respectiv, prin interiorul conductei 3; în piston, uleiul este dirijat spre zonele din ce în ce mai calde (port-segmenþi, apoi capul pistonului), de cãtre
piesa profilatã 1; datoritã acesteia, se înlesneºte execuþia pãrþii superioare a pistonului. Un alt piston cuprinde partea superioarã de oþel ºi mantaua din aliaj uºor (fig. 15). Aceste elemente se asambleazã prin intermediul piesei interioare 4, ceea ce le permite sã se dilate independent. Întrucât piesa 4 este fabricatã din oþel, inserarea ei sporeºte robusteþea construcþiei ºi îmbunãtãþeºte transmiterea eforturilor de la capul pistonului la tija acestuia. În acelaºi scop, în suprafaþa de sprijin dintre capul pistonului ºi piesã existã un mic joc sub unghiul ϕ , cât timp prezoanele 2 nu sunt tensionate; jocul dispare la definitivarea montajului, asigurând contactul ferm între cele douã organe. Pentru rigidizare, la baza mantalei este prevãzut cordonul de fontã 7. Deoarece suportã o încãrcare termicã puternicã, pistonul este rãcit forþat cu apã, circulaþia acesteia fiind asiguratã de conducta 5 ºi orificiul 1. Utilizarea apei tehnice ca lichid de rãcire impune etanºarea spaþiului de sub capul pistonului, cu garniturile 3 ºi protejarea canalului din tija pistonului cu cãmaºa din oþel inoxidabil 6. Pentru vehicularea lichidului de rãcire spre ºi de la piston, se folosesc sisteme telescopice (fig. 16). Când lichidul este transmis prin tija pistonului (fig. 16,a), o conductã mobilã 3 culiseazã în alta fixã 2, pe fiecare sens de deplasare a lichidului. Conductele 3 sunt prinse pe un braþ al capului de cruce 4 ºi montate pe presetupe în conductele 2. ªocurile hidraulice cauzate de variaþia volumului ocupat de lichidul de rãcire sunt atenuate de rezervoare-tampon cu pernã de aer 1. Un alt tip de sistem de rãcire a pistonului motorului naval lent, utilizatã în cazul rãcirii cu apã, are conducte mobile conectate direct de piston (fig. 16, b). Ea sporeºte eficienþa rãcirii, deoarece traseele de intrare ºi ieºire din piston sunt separate printr-un spaþiu în care se aflã gaze din carter; conductele mobile se deplaseazã la exteriorul celor fixe ºi sunt dotate cu elemente de etanºare plasate în pereþii camerei 6, ce comunicã cu atmosfera. Tija pistonului lucreazã
Vasa 32 pag. 12
Vasa 32 pag. 12
Fig. 12
Fig. 14
Fig. 13
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1
C 18 C 19
C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 110
pe presetupa 5, care racleazã impuritãþile ºi asigurã menþinerea presiunii de baleiaj. La izolarea completã a camerei 6 faþã de carter contribuie ºi elementele de etanºare (presetupa tijei pistonului) 7. Conductele fixe au la capetele superioare ajutaje Venturi, pentru a elimina pierderile de apã din instalaþie; eventualele scãpãri sunt drenate din camera 8. Sistemul se utilizeazã curent la motoarele din seriile Sulzer RD ºi RND, înlocuind soluþia de rãcire cu ulei de la seria mai veche RN. O soluþie larg utilizatã la motoarele din seria KSZ a firmei MAN constã în utilizarea apei de rãcire
cãtre o piesã 2 (fig. 17), montatã sub capul pistonului. Pe suprafaþa inferioarã a acestuia se executã prin gãurire numeroase canale 1, cu diametru relativ mare, realizând aºa-numita structurã fagure, fãrã ca rezistenþa mecanicã a pistonului sã fie afectatã, piesa fiind turnatã din oþel. Ea este prevãzutã cu orificii prin care se proiecteazã jeturi de apã în canalele 1; întrucât orificiile sunt excentrice faþã de canale, deplasarea apei necesitã un consum energetic redus. Se obþine rãcirea foarte intensã datoratã urmãtoarelor proprietãþi: lungimea canalelor 1 este de cel mult patru ori mai mare decât diametrul lor, dispunerea orificiilor din piesa 2 ºi realizarea unei diferenþe de
Fig. 15
Fig. 17
Fig. 16
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17
18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
111
presiune de 1 kPa, asigurând deplasarea apei pe întregul contur al fiecãrui canal, sporind suprafaþa totalã de rãcire mult peste suprafaþa care primeºte cãldurã; apa este puternic agitatã în cavitatea piesei 2 (sistem shaker). Pentru seria de motoare lente RLA, ulterioarã celor prezentate anterior, fabricate de firma Sulzer s-au întreprins studii comparative între diverse soluþii ale capului pistonului, aºa cum se aratã în figura 18. Analiza comparativã demonstreazã urmãtoarele performanþe: reducerea substanþialã a tensiunilor mecanice produse de presiunea gazelor din cilindru pentru varianta constructivã B; reducerea tensiunilor termice, reducerea temperaturii maxime cu aproximativ 60oC ºi o rãcire eficientã, inclusiv pentru regimuri parþiale. O contribuþie importantã în obþinerea de soluþii ameliorate din punct de vedere al comportamentului la solicitãrile termice a avut-o, aºa cum s-a menþionat deja, îmbunãtãþirea rãcirii pistonului, printr-o o mai bunã înþelegere a procesului de rãcire realizate cu jetul de agent de rãcire (jet-shaker), aºa cum este actualmente utilizat în motoarele Sulzer seria RTA. Agentul de rãcire (ulei lubrificator) este dirijat sub formã de jet în orificiile de rãcire practicate pe partea inferioarã a capului pistonului, a cãror suprafaþã o atinge, rãcind-o, înainte de a fi drenat. În anumite etape ale ciclului motor, rãcirea se face, predominant, prin
acþiunea jetului în orificiile menþionate, pe când în alte etape efectul agitator al uleiului în spaþiile de rãcire este mai intens (fig. 19). Toate acestea au permis proiectarea pistonului pentru temperaturi mai scãzute, necesare protejãrii termice a suprafeþelor calde; aceste temperaturi, reduse faþã de situaþiile pe care le prezintã motoarele din seriile anterioare celui analizat, se obþin prin optimizarea
Sulzer RTA-C Wartsila fig. 33
ieºire
turaþie
Fig. 19
Fig. 18
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1
C 18 C 19
C 2C 2C 2C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 112
jeturilor de ulei din punct de vedere al cantitãþii ºi direcþiei, ca ºi din acela al arhitecturii drenajului agentului de rãcire. S-a recurs la reglarea parametrilor procesului de rãcire a capului pistonului în scopul intensificãrii transferului de cãldurã prin curgere turbulentã în spaþii de rãcire adecvate, astfel încât ambele condiþii de rezistenþã, termice ºi mecanice, sã fie îndeplinite (fig. 20). Firma MAN B&W acordã, în ultimul timp, o mare importanþã interacþiunii modelare-proiectare-testare-dezvoltare-experienþã în exploatare. Astfel, referitor la grupul piston al motoarelor în doi timpi din seria MC, s-a recurs ºi aici la soluþia de majorare considerabilã a pragului de foc al pistonului (fig. 21), în scopul deja menþionat al protecþiei termice a zonei port-segmenþi faþã de gazele de ardere. Reducerea gradatã a tensiunilor termice ale acestei zone se reflectã în creºterea duratei de funcþionare între revizii succesive, deci în creºterea fiabilitãþii, a siguranþei în funcþionare. Un alt avantaj al soluþiei adoptate pentru piston îl reprezintã reducerea suprafeþei de contact dintre chiulasã ºi blocul cilindrilor, deci reducerea încãrcãrii termice a cãmãºii ºi a filmului de lubrifiant aferent. Fluxul termic ridicat, dezvoltat în asemenea motoare, este absorbit, în principal, de cãtre chiulasa din oþel, caracterizatã printr-o stabilitate termicã superioarã faþã de aceea a cãmãºii confecþionate din fontã cenuºie, ceea ce va conduce, ºi prin acest fapt, la creºterea fiabilitãþii cãmãºii cilindrului.
Sulzer RTA-C Wartsila fig. 34
MAN MC fig. 7
Fig. 20
Fig. 21
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17
C 18 C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
113
4.5. Calculul pistonului 4.5.1. Schema de calcul, dimensiuni
caracteristice, solicitãri
pL -lungime piston; mL -lungime manta; cL -lungime
de compresie; 1g -grosimea pistonului în zona
canalelor de segmenþi; 2g -grosimea pistonului în
zona mantalei; cD -diametrul capului pistonului
ciD -diametrul capului pistonului la interior; mD -
diametrul mantalei; sD -diametrul pistonului în dreptul canalelor de segmenþi; D -alezajul cilindrului; uid -diametrul umerilor pistonului la
interior; ued -diametrul umerilor pistonului la
exterior; ul -lungimea umerilor pistonului; ∗h -înãlþimea de protecþie în regiunea de foc (regiunea primului segment); h -înãlþimea flancului dintre douã canale succesive de segmenþi; δ -grosimea capului pistonului; 1h -înãlþimea primului flanc; (fig. 1).
( ) ( ) ( ) ;1.17.0;2.18.0;8.12.1 DLDLDL cmp ÷=÷=÷=
( ) ( )( ) M2t; - 03.002.0
M4t; - 05.003.0;08.005.0
2
21
DgDgDg
÷=÷=÷=
( ) ( )( ) ;25.02.0
;5.13.1;38.034.0Dl
ddDd
u
uiueui
÷=÷=÷=
( ) ( ) .2;055.0045.0;02215.0 1gDDDhDh cis +=÷=÷=∗
Solicitãrile ce apar în piston sunt de douã tipuri: • solicitãri mecanice;
• solicitãri termice.
Solicitãrile mecanice sunt produse de forþa de presiune a gazelor pF ºi forþa de inerþie a maselor
în miºcare alternativã aF . Sub acþiunea lui pF
pistonul suferã o deformaþie axialã. Sub acþiunea forþei N ′ (reacþiunea faþã de componenta normalã N), forþã variabilã ca sens, corpul pistonului se ovalizeazã (fig. 2). Solicitãrile termice ce apar în mecanismul motor sunt cu atât mai importante cu cât puterea motorului este mai mare. Posibilitatea de calcul a acestora este mai dificilã, datoritã complexitãþii fenomenelor termogazodinamice din cilindrul motor. Astfel, în capul pistonului, care vine în contact atât cu gazele fierbinþi cât ºi cu încãrcãtura proaspãtã (mult mai rece), se instaleazã un flux termic nestaþionar ce conduce la un anumit regim termic al motorului.
Fenomenele termice se studiazã sub trei aspecte:
• determinarea distribuþiei de temperaturi în capul pistonului;
• determinarea distribuþiei tensiunilor termice; • determinarea deformaþiilor datorate acestor
tensiuni, care pot afecta fiabilitatea organului respectiv.
4.5.2. Calculul capului pistonului
Ipoteze de calcul: forþa de presiune a gazelor
pF solicitã mecanic capul pistonului; pentru a
facilita calculul acestei solicitãri se considerã capul pistonului ca fiind o placã circularã de grosime δ, încastratã pe contur ºi încãrcatã uniform de presiunea maximã a gazelor maxp .
• Tensiunile radiale maxime la extremitate
( )2
max 243
⎟⎠
⎞⎜⎝
⎛δ
−=σ cicartre
Dpp , (1)
maxp -presiunea maximã a gazelor în cilindru; cartp -contrapresiunea gazelor din carter (aprox. 100 kN/m2). • Tensiunile tangenþiale
rete νσ=σ , (2) ν =0.3 coeficientul lui Poisson
Fig. 1
Dc
δ
h*
Dci
Ds
g2
DmD
AL c
L m
L p
d ui
d ueg1
A
N`Ff
Fp
wp
B
N
Fig. 2
C C C C C C C C C
C C C C C C C C
C 18
C 20 C C C C C C C C C C C C C C C C C C C C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C C C C C C C

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 114
• Tensiunile termice radiale la extremitate
( )ecre ttEa −α=σ 10 , (3)
E [N/mm2]-modulul de elasticitate longitudinal; α [grd-1]-coeficient de dilatare liniarã; ct , et [0C]
temperatura la centrul ºi la exterior plãcii; 1a coeficient experimental ce þine seama de modul de schematizare a distribuþiei de temperaturi în capul pistonului, 5.01 −=a pentru distribuþie liniarã.
( ) ( )( )
( ) ( ) () ( ) ( )
.grd10
125.0;C400100grd105.26
21;C400100 grd10497.10
;mm/N102.10.2;mm/N;10
6.14.1;400 la mm/N109.08.0
16
016
016
2525
025
−−
−−
−−
⋅
⋅÷=α÷⋅÷
÷=α÷⋅÷=α
⋅÷÷=⋅
⋅÷=⋅÷=
OL
AlFc
OL
FcAl
E
ECE
• Tensiunile termice tangenþiale
( )ecote ttEa −α=σ 2 , (4)
25.02 =a .
• Rezultanta tensiunilor
0
0
tetete
rerere
σ+σ=σ
σ+σ=σ
Σ
Σ. (5)
• Calculul de verificare
( ) atere σ≤σσ ΣΣ ,max , (6)
aσ -rezistenþa admisibilã:
( ) ( )( ) .mmN20090
;mmN200100;mmN60252
22
÷=σ
÷=σ÷=σ
aFc
aOLaAl
4.5.3. Calculul regiunii port-segmenþi
Ipoteze de calcul: regiunea port-segmenþi este solicitatã la întindere de forþa de inerþie a maselor în miºcare alternativã am′ , situate deasupra secþiunii de calcul A-A (zonã periclitatã datoritã orificiilor de scurgere a uleiului); de asemenea, aceastã regiune este solicitatã la comprimare datoritã forþei maxime de presiune a gazelor
maxpF .
• Calculul de verificare la comprimare
acAAAA
pc A
pD
AF
σ≤
π
==σ−−
max
2
max 4 , (7)
( )
xcis
xcis
AA dDD
iDD
A24
22 −−
−π=− (8)
xd -diametrul unui canal de scurgere a uleiului; xi -
numãrul canalelor; acσ -rezistenþa admisibilã la comprimare:
( ) ( ) .N/mm8060 ;N/mm4020 22 ÷=σ÷=σFcacAlac
• Calculul de verificare la întindere
( )at
AA
a
AA
at A
RmA
Fσ≤
λ+ω==σ
−−
12''max
, (9)
( )λ+ω= 12''max RmF aa , (10)
atσ -rezistenþa admisibilã la tracþiune (întindere):
( ) ( ) 22 N/mm3530 ;N/mm1210 ÷=σ÷=σ FcatAlat ; R
[m]-raza de manivelã; ω [s-1]-viteza unghiularã a arborelui cotit; λ-coeficientul de alungire a bielei.
4.5.4. Calculul mantalei pistonului Ipoteze de calcul: mantaua pistonului este solicitatã la strivire de cãtre forþa normalã N ce o apasã pe cãmaºa cilindrului; lungimea mantalei se verificã din condiþia ca presiunea de strivire sã nu depãºeascã valoarea admisibilã, astfel încât sã nu se producã exfolierea peliculei de lubrifiant; se presupune cã forþa normalã de reacþiune N ′ nu acþioneazã punctiform, ci se distribuie pe un sector circular cu unghiul la centru de aproximativ 1200, a cãrui lungime ml este:
DDDm ≅
π=⋅
π=
3120
3600
0l , (11)
iar aria proiectatã pe direcþia axei bolþului x-x a suprafeþei pe care acþioneazã forþa N ′ va fi (fig. 3):
mmm LDL ⋅≈⋅l . (12) • Calculul de verificare la presiune specificã
amevm
m pALD
Np ≤−⋅
=2
max , (13)
( ) 22 N/mm1;N/mm7.04.0 ≤÷= AlamFcam pp ; evA -aria
suprafeþei proiectate a porþiunii evazate (fig. 3).
120o N`N`
Aev(sector de evazare)
Fig. 3
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17
18 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
115
• Calculul de verificare la forfecare a umerilor pistonului
( ) afuiueuiue
p
f pdd
D
dd
Fτ≤⋅
−=
−π
=τ max22
2
22
max
21
4
21
, (14)
afτ -rezistenþa admisibilã la forfecare:
( ) ( ) 22 N/mm5030 ;N/mm3530 ÷=τ÷=τAlafFcaf
• Determinarea diametrului pistonului la
montaj
( )[ ]( )0,,
;0; 1
1tt
ttDD
mfcmc
fmcfcilcil
mc −α+
Δ−−α+= , (15)
D, Dc, Dm.-diametrele la montaj (la rece) ale cilindrului, pistonului în zona capului, respectiv mantalei (fustei); mc ΔΔ , -jocurile la rece în zonele
capului ºi mantalei; fm
fc ΔΔ , -jocurile respective în
funcþionare (la cald); [ ] grd-1cilα -coeficientul de
dilatare liniarã a cãmãºii cilindrului; tfcil=100÷200 oC-temperatura în funcþionare a cilindrului; t0 [oC]-temperatura la montaj;
( ) ( )( ) ( ) 103.19.0 ;1043
105.13.1 ;105.55.433
33
DD
DDfm
fc
mc−−
−−
⋅÷=Δ⋅÷=Δ
⋅÷=Δ⋅÷=Δ .
4.5.5. Încãrcarea termicã a capului pistonului
Pistonul primeºte un flux de cãldurã pQ& [KJ/h],
care reprezintã ( )%2015÷ din cãldura disponibilã degajatã în urma arderii într-un cilindru pe ciclu. Transferul de cãldurã de la gaze, la capul pistonului, se realizeazã printr-un proces radiant ºi convectiv. Prin intermediul capului pistonului se evacueazã un flux [ ]KW eQ& în urmãtoarele
proporþii: ( )%7560 ÷ - regiunea port-segmenþi;
( )%3020 ÷ - manta; restul este cedat agentului de rãcire, gazelor cu care partea inferioarã a capului pistonului vine în contact, precum ºi bolþului ºi piciorului bielei. În acest fel în piston, se instaleazã un regim termic nestaþionar. La temperaturi ridicate se poate considera cã fenomenul devine staþionar:
pe QQ && = (16)
Problema încãrcãrii termice îmbracã trei aspecte: • determinarea regimului termic; • determinarea tensiunilor termice; • determinarea deformaþiilor produse de aceste
tensiuni.
Se va analiza doar primul aspect, care poate fi tratat: • global — cu determinarea factorului de solicitare
termicã a materialului pistonului; • discret — se face discretizarea formei geometrice
a capului pistonului într-o reþea de noduri, în care, prin metode numerice, se determinã distribuþia de temperaturi; astfel se pot trasa izotermele din capul pistonului.
În vederea reducerii solicitãrilor termo-mecanice ale pistonului, se procedeazã iniþial la o analizã discretã a încãrcãrii termice a capului pistonului ºi a componentelor adiacente, aºa cum se prezintã în figura 4, pentru un motor naval KSZ-C/CL, produs de firma MAN; pentru analiza solicitãrilor, se recurge la o analizã extensivã bazatã pe metoda elementelor finite (MEF).
Un motor naval modern este cel produs de firma Sulzer seria RTA-C, pentru care s-a acordat o mare atenþie atât problemelor de analizã ºi proiectare cu metode de calcul numeric moderne, cât ºi validãrii experimentale ale rezultatelor obþinute prin calculul numeric. Principalele patru obiective ale acestor activitãþi sunt: • adaptarea arhitecturii camerei de ardere ºi
îmbunãtãþirea ulterioarã a proiectãrii rãcirii injectoarelor ºi a capului pistonului, a chiulasei ºi cãmãºii cilindrului;
• alegerea judicioasã a numãrului de injectoare cu geometria jetului optimizatã atât pentru sporirea fiabilitãþii, cât ºi pentru diminuarea consumului de combustibil, în scopul reducerii solicitãrilor termice;
• acordarea motorului cu grupul de supra-alimentare, optimizarea arhitecturii ferestrelor de baleiaj, a deschiderii ºi închiderii supapelor de evacuare ºi a raportului de comprimare, în concordanþã cu mãrimea pistonului ºi cu mãrirea coeficientului de exces de aer prin mãrirea presiunii de supraalimentare ºi închiderea mai devreme a supapei de evacuare;
• micºorarea lungimii bielei, cu efectul corespunzãtor asupra deplasãrii pistonului.
Temperaturile mãsurate în capul pistonului motorului confirmã pe deplin calculele efectuate cu MEF; aºa cum era de aºteptat în urma aplicãrii optimizãrilor, suprafeþele izoterme de 375±20oC au fost obþinute fãrã puncte de vârf, aºa cum reiese din figurile 5, 6 ºi 7: figura 5 prezintã distribuþia temperaturilor calculate cu MEF pentru pistonul motorului RTA96C la regimul de funcþionare maximã continuã MCR, prin alocarea ca date de intrare a valorilor mãsurate pe motorul RTA84C, figura 6 valorile mãsurate ale temperaturilor la suprafaþa pistonului motorului 11RTA96C la MCR (53000 kW ºi 94 rot/min), la care se poate constata o distribuþie uniformã, efect notabil al utilizãrii siste-
C C C C C C C C C
C C C C C C C C
C 18
C 20 C C C C C C C C C C C C C C C C C C C C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C C C C C C C
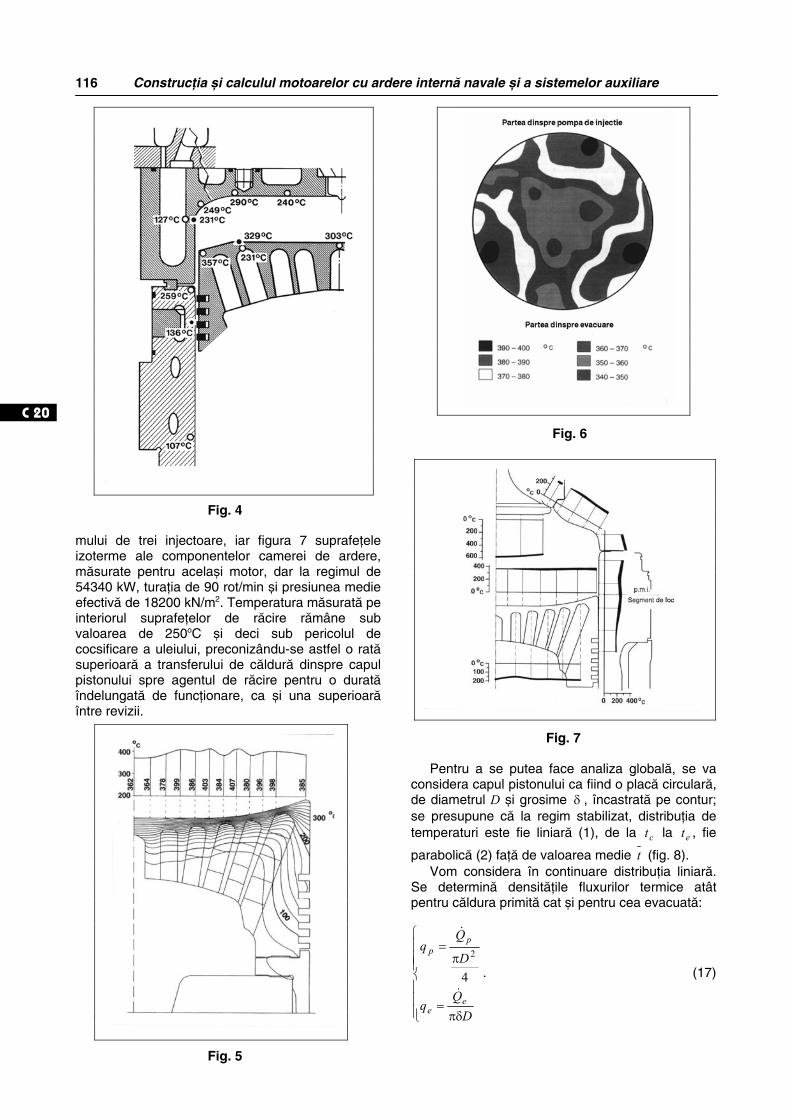
Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 116
mului de trei injectoare, iar figura 7 suprafeþele izoterme ale componentelor camerei de ardere, mãsurate pentru acelaºi motor, dar la regimul de 54340 kW, turaþia de 90 rot/min ºi presiunea medie efectivã de 18200 kN/m2. Temperatura mãsuratã pe interiorul suprafeþelor de rãcire rãmâne sub valoarea de 250oC ºi deci sub pericolul de cocsificare a uleiului, preconizându-se astfel o ratã superioarã a transferului de cãldurã dinspre capul pistonului spre agentul de rãcire pentru o duratã îndelungatã de funcþionare, ca ºi una superioarã între revizii.
Pentru a se putea face analiza globalã, se va considera capul pistonului ca fiind o placã circularã, de diametrul D ºi grosime δ , încastratã pe contur; se presupune cã la regim stabilizat, distribuþia de temperaturi este fie liniarã (1), de la ct la et , fie
parabolicã (2) faþã de valoarea medie t (fig. 8). Vom considera în continuare distribuþia liniarã. Se determinã densitãþile fluxurilor termice atât pentru cãldura primitã cat ºi pentru cea evacuatã:
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
πδ=
π=
DQ
q
D
ee
pp
&
&
4
2
. (17)
MAN KSZ-C fig. 7
Sulzer RTA-C Wartsila fig. 60
Sulzer RTA-C Wartsila fig. 61
Sulzer RTA-C Wartsila fig. 62
Fig. 4
Fig. 5
Fig. 6
Fig. 7
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17
18 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
117
La echilibru este verificatã relaþia (16), rezultã:
δ⋅=
δ⋅
π=
444
2DqD
D
Qq p
pe
&. (18)
Pentru densitatea fluxului qe se utilizeazã relaþia transferului conductiv (Fourier):
( ) ( )ecece ttD
ttD
q −λ
=−λ
=2
2
, (19)
cu λ -coeficientul de conductivitate termicã:
( ) ( )mKkW150.0143.0
mKkW3.016.0, ÷=λ÷=λ AlFcOL ; ; s-
a presupus anterior pentru qe doar fluxul de cãldurã degajat printr-o jumãtate din secþiunea transversalã a plãcii circulare. Notãm cu ξ fracþiunea de cãldurã din cea disponibilã preluatã de capul pistonului. Astfel vom avea:
[ ],4
6012
42
2
kJ/h 1
w p τπ
ξ=
=τ
πξ=ξ=ξ=
DpQc
nSDipiQc
PiQc
iQC
Q
eie
eie
eieih
p&
(20)
unde: [ ]Kg/h hC -consumul orar al motorului;
[ ]KJ/Kg iQ -puterea caloricã inferioarã a
combustibililui; [ ]Kg/KWh ec -consumul specific;
[ ]KW eP -puterea efectivã a motorului; [ ]2KN/m ep -
presiunea efectivã; [ ]m , SD -raportul
diametru/cursã; [ ]rot/min n -turaþia; [ ]cicli/min 2τn
;
[ ]cicli/sec 6012
⋅τn
; [ ]m/s 30Snw p = -viteza medie a
pistonului; τ -numãrul de timpi de realizare a ciclului motor. Introducem relaþia (20) în prima relaþie din setul (17), obþinând:
[ ]2KW/m 1τ
ξ= peiep wpQcq , (21)
pe care o vom introduce apoi în (18):
[ ]2KW/m 14 τδ
ξ=DwpQcq peiee . (22)
Regimul termic instalat în capul pistonului produce tensiuni termice ce se pot estima global cu relaþia:
( ) aec ttaE σ≤−α=σo . (23) La limitã diferenþa din (23) va fi:
ασ
=−aE
tt aec . (24)
Introducem (24) în (19):
ασ
⋅λ
=aED
q ae
2. (25)
Comparãm (25) cu (22):
2 14 α
σ⋅
λ=
τδξ
aEDDwpQc a
peie , (26)
rezultând:
aQcEDwp
ie
ape ξ
τδ⋅
αλσ
=82 . (27)
Notãm:
aQcc
ieξτδ
=8
, (28)
constantã pentru un motor dat; definim:
αλσ
=E
f ast , (29)
factorul de solicitare termicã a materialului capului pistonului. Din (27) rezultã:
C C C C C C C C C
C C C C C C C C
C 18
C 20 C C C C CC C C C C C C C C C C C C C C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C C C C C C C
Fig. 8

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 118
stpe cfwDp =2 . (30)
Tendinþa actualã la motoarele navale este de creºtere a presiunii medii efective ºi a vitezei medii; se impun urmãtoarele observaþii: • dacã .constf st = , rezultã cã diametrul pistonului
scade, iar numãrul de cilindri creºte pentru pãstrarea aceleiaºi puteri;
• dacã D = const., rezultã cã factorul de solicitare termicã creºte, adicã vom utiliza materiale cu calitãþi superioare.
Ambele soluþii vizeazã etapa de concepþie a motorului. În exploatare respectarea relaþiei (30) se face prin micºorarea diferenþei maxime de temperaturi din relaþiile anterioare, prin creºterea eficienþei instalaþiei de rãcire a pistoanelor motorului.
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17
18 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
119
5. Construcþia ºi calculul bolþului Bolþul (axul pistonului) este organul mobil ce articuleazã pistonul cu biela, la motoarele fãrã cap de cruce, fiind montat în orificiile din umerii pistonului ºi din piciorul bielei.
5.1. Rol funcþional • organ specific motoarelor navale în patru timpi; • este montat în umerii pistonului, fãcând legãtura
dintre piston ºi bielã ºi transmiþând acesteia forþa de presiune a gazelor ºi forþa de inerþie a maselor aflate în miºcare alternativã.
5.2. Materiale
Materialul din care este confecþionat bolþul trebuie sã corespundã urmãtoarelor exigenþe: • rigiditate mare; • calitãþi antifricþiune (bolþul fiind montat în piciorul
bielei); • presiune specificã redusã, masã micã. Se utilizeazã oþel carbon de calitate ºi oþeluri aliate.
5.3. Tehnologie de fabricaþie, soluþii constructive ºi de montaj
Din punct de vedere constructiv este conceput ca un cilindru gãurit, sau un solid de egalã rezistenþã. Forma constructivã este dictatã de necesitatea obþinerii unei mase cât mai mici ºi a unei rigiditãþi cât mai mari la un preþ de cost cât mai redus; bolþul se realizeazã în diferite variante (fig. 1), în funcþie de tipul motorului ºi modul de îmbinare cu biela ºi pistonul: bolþ cu secþiune constantã (fig. 1,a), soluþie tehnologicã simplã; solid de egalã rezistenþã (fig. 1,b), soluþie ce mãreºte rigiditatea bolþului; bolþ cu secþiune în trepte (fig. 1,c ºi d), care, ca ºi varianta anterioarã, presupune dificultãþi tehnologice mai mari.
Drept urmare a celor de la 5.1 ºi 5.2, se executã în una din variantele: • bolþ flotant (fig. 2); este liber atât în umerii
pistonului cât ºi în piciorul bielei; soluþia asigurã uzurã uniformã pe toatã suprafaþa sa exterioarã; alt avantaj constã în faptul cã, dupã un numãr de cicluri, are loc rotirea completã a bolþului, care mediazã uzura pe periferie; pentru evitarea deplasãrii axiale a bolþului, la capetele sale se vor prevedea inele de siguranþã, de secþiune circularã (fig. 2,a) sau dreptunghiularã (fig. 2,b),
acestea din urma introducând concentratori de tensiune mai mari; deoarece inelele elastice de siguranþã nu permit trecerea frontalã a uleiului pe suprafaþa bolþului, se pot utiliza capace din aliaj de aluminiu (fig. 2,c), care sã nu producã rizuri la contactul cu cilindrul;
• bolþ fix în piciorul bielei ºi liber în umerii pistonului (fig. 3); pentru fixarea în piciorul bielei, acesta din urmã va fi secþionat parþial (construcþie elasticã a bielei) ºi se va utiliza un ºurub de strângere; soluþia reduce lungimea bolþului, eliminându-se ungerea în piciorul bielei; de asemenea, se micºoreazã dezaxarea bielei, reducându-se astfel uzura ºi nivelul zgomotelor; deoarece soluþia este mai dificilã, se preferã încãlzirea piciorului înainte de montare, asigurându-se strângerea;
Fig. 1
Fig. 2
Fig. 3
Fig. 4
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1
C 18 C 20
C 21 C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 120
• bolþ fix în umerii pistonului ºi liber în piciorul bielei (fig. 4); soluþia este mai puþin utilizatã, deoarece secþiunea transversalã prin umerii pistonului corespunde gãurilor de trecere a ºurubului de fixare a bolþului ºi va fi astfel slãbitã; datoritã concentrãrii tensiunilor, soluþia nu este folositã la motoarele navale.
5.4. Calculul bolþului
5.4.1. Schema de calcul, dimensiuni caracteristice, solicitãri
l—lungime bolþ; lp—lungime bolþ în umerii pistonului; lb—lungime bolþ în interiorul piciorului bielei; j—jocul dintre umerii pistonului ºi piciorul bielei; dbi—diametrul interior al bolþului; dbe—diametrul exterior al bolþului (fig. 20.4).
eb
ib
dd
=α (1)
( ) ( )( ) fix;bolþ - 2
flotant;bolþ -
30270;38.034.036.034.0
..Ddbe
÷=α÷=÷=α
( )( )( )( ) fix.bolþ -
fix;bolþ pentru - 0.930.88
flotant;bolþ -
flotant;bolþ pentru -
DlDlDl
Dl
b
b
32.027.0
42.032.087.08.0
÷=÷=÷=
÷=
Bolþul este supus unor solicitãri termice ºi mecanice puternice. Regimul termic al bolþului se situeazã în gama (130÷180) 0C. Dintre solicitãrile mecanice amintim: solicitare la încovoiere, obosealã datoratã încovoierii (solicitare variabilã), presiune de contact, forfecare ºi ovalizare. La creºteri bruºte de presiune bolþul poate fi solicitat la ºoc.
5.4.2. Calculul de verificare la presiune de contact în umerii pistonului ºi în piciorul bielei
appeb
p pld
Fp ≤=
2max (2)
( ) ( )λ+ϖ−−= 12
maxmax RmmFF boltpp (3)
maxpF -forþa maximã de presiune a gazelor; pm -
masa grupului piston; boltm -masa proprie a bolþului.
app =(25÷54) 2N/mm -presiunea de contact
admisibilã în umerii pistonului;
abbeb
b pld
Fp ≤
⋅= max (4)
( )9040÷=abp 2N/mm -presiunea de contact
admisibilã în piciorul bielei.
5.4.3. Calculul de verificare la încovoiere Dupã cum se observã în figura 5, momentul încovoietor maxim va fi la mijlocul grinzii drepte ce schematizeazã bolþul.
4232
22b
pilFllFM −⎟
⎠⎞
⎜⎝⎛ −= ; (5)
pl se exprimã funcþie de celelalte dimensiuni,
pentru cã bl poate fi determinat mai uºor:
22b
pl
jll −−= (6)
Introducem (6) în (5) ºi obþinem:
( ).
125.04
1282
24332
322
b
bbbi
ljlF
ljlFlljllFM
++=
=++
⋅=⎟⎟⎠
⎞⎜⎜⎝
⎛−++−=
(7)
Tensiunea de încovoiere este:
WM i
i =σ (8)
unde W —modulul de rezistenþã al secþiunii transversale a bolþului:
( ) ( )321
32
4344 α−π=
−π= eb
eb
ibeb dd
ddW , (9)
adicã:
F2
F2
lp lplbl
F2
F2
l
lbj
lp lp
F
d ib d eb
Fig. 5
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17
C 18 C 20
C 21 C 22 C 23 C 24 C 25 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56
dbe
dbi

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
121
( )( )( )4343 1
5.0485.032
15.04
12 α−
++=⋅
α−π
++⋅=σ
eb
b
eb
bi
dljlF
dljlF
. (10)
De aici, verificarea la încovoierese face pentru forþa maximã:
( )( ) ai
eb
bi
dljlF
σ≤α−
++=σ
43max
max1
5.0485.0 , (11)
( ) ( ) N/mm ;N/mm 2
aliat oþel2
OLC 500250150120 ÷=σ÷=σ aiai
-rezistenþa admisibilã la încovoiere.
5.4.4. Calculul de verificare la obosealã • coeficientul de siguranþã pentru bolþul fix în
piciorul bielei, solicitat la obosealã prin ciclu alternant asimetric:
a
mvk
cc ≥ψσ+σ
ε⋅γβ
σ=
σ
σ
−1 ; (12)
• coeficientul de siguranþã pentru bolþul flotant,
supus unui ciclu de obosealã alternant simetric:
avk
cc ≥σσ
βε⋅γ
= −
σ
σ 1 , (13)
1−σ -rezistenþa la obosealã prin ciclu alternant
simetric de încovoiere; σβk -coeficientul concentratorilor de tensiune; γ - coeficientul stãrii
suprafeþei; σε -coeficient dimensional; vσ - amplitudinea tensiunilor de încovoiere:
2minmax σ−σ
=σv ; (14)
mσ -tensiunea medie de încovoiere:
2minmax σ+σ
=σm , (15)
minmax σσ iº -tensiunile maxime, respectiv minime de încovoiere, din relaþia (10), pentru forþã maximã, respectiv minimã; ψ - coeficient de material:
0
012σ
σ−σ=ψ − , (16)
0σ -rezistenþa admisibilã în solicitarea la obosealã
prin ciclu pulsatoriu de încovoiere; ac -coeficient de siguranþã admisibil:
( ) flotant;bolþ pentru
bielei; piciorul în fixbolþ pentru
2.21)42(
÷=÷=
a
a
cc
( ) ( );1;8.07.0
5.76(;6.14.1;5.04.0 1
≅β÷=ε−
÷=σσ÷=σσ÷=σ
σσ
−
k
rr
rupere;larezistenþaN/mm
)2
o1-
cu cãlit bolþ 5.11.1 ÷=γ suprafaþa lustruitã; =γ
truitã.
-lus suprafaþacu nitrurat iº cementat bolþ 5251 .. ÷=
5.4.5. Calculul de verificare la forfecare
Tensiunea de forfecare se va calcula cu formula lui Juravski (fig. 6):
xIbST
=τ , (17)
unde xI -momentul de inerþie al secþiunii transversale a bolþului; S-momentul de inerþie static al secþiunii de sub AB; b -lungimea efectivã a acestei secþiuni; T- forþa tãietoare:
2FT = . (18)
Distanþa planului de secþiune este:
iiee rry ϕ=ϕ= coscos , (19) cu er ºi ir razele exterioare ºi interioare ale
secþiunii, eϕ ºi iϕ semiunghiurile la vârf ale fibrelor extreme ale secþiunii considerate; variaþia infinitezimala a secþiunii este:
Fig. 6
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1
C 18 C 20
C 21 C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 122
iiieee drdrdy ϕϕ−=ϕϕ−= sinsin , (20) iar segmentele formate prin secþionare sunt:
iiee sin2rBArAB ϕ=′′ϕ= ;sin2 . (21) Cu aceste precizãri, momentul de inerþie static devine:
( ) ( )
( )iiee
iiieee
iiiiii
eeeeeee
rr
drdr
drrr
drrr
dyBAydyyABAydydAS
ie
i
e
iee i
ϕ−ϕ=
=ϕϕ−ϕϕ=
=ϕϕϕϕ−
−ϕϕϕϕ=
=′′−=′−=
∫∫
∫
∫
∫∫∫ ∫
ϕϕ
ϕ
ϕ
ϕϕϕ ϕ
3333
0
23
0
23
0
0
000 0
sinsin32
sinsin2sinsin2
sinsin2cos
sinsin2cos
(22) Lungimea secþiunii rezultate prin intersecþia planului de secþiune paralel cu axa bolþului situat la distanþa y de aceasta, cu o secþiune transversalã prin bolþ va fi:
( )iiee rrBAABb ϕ−ϕ=′′−= sinsin2 (23) Momentul de inerþie axial al secþiunii transversale a bolþului:
( ) ( )4
14
4444 α−π=
−π= eie
xrrr
I (24)
Conform relaþiei (17), se va obþine:
( )( ) ( )
( )
( )
( )42
222
42
222
44
2222
44
3333
1sinsinsinsin
38
1sinsinsinsin
1sinsinsinsin
14
sinsin2
sinsin32
2
α−
ϕα+ϕϕα+ϕ⋅
π=
=α−
ϕα+ϕϕα+ϕ⋅
π=
=α−
ϕ+ϕϕ+ϕ⋅=
=α−πϕ−ϕ
ϕ−ϕ=τ
eb
iiee
e
iiee
e
iiieieee
eiiee
iiee
dF
r2F
rrrrr
3π2F
rrr
rrF
3
(25)
Când 2πFF iemax =ϕ=ϕ= , se obþine tensiunea
de forfecare maximã, de unde condiþia de verificare:
( ) afebd
F τ≤α−
α+α+⋅=τ
42
2
maxmax1
185.0 (26)
cu valorile rezistenþei admisibile la forfecare:
( )( ) OLC. pentru
aliat; otel pentru
MPa
MPa
af
af
10060
220100
÷=τ
÷=τ
5.4.6. Calculul de verificare la ovalizare
Ipoteze de calcul: se considerã cã forþa ce încarcã bolþul se distribuie sinusoidal într-o secþiune transversalã a sa (fig. 7). Tensiunea în punctele caracteristice:
( )αβ⋅
±=σ ieb
i ldF (27)
F -forþa din (3); 4,1=i ; semnele alterneazã: + pentru 41 iº=i , - pentru 32 iº=i ; ( )αβi sunt funcþii ce depind de raportul α (fig. 8):
( )( )( )( )( )( )
( )( )( )( )( )( )
.1
636.01
121174.0
;1
11
12119.0
;1
636.01
12174.0
;1
11
1219.0
24
23
22
21
α−−
αα−
α+α+=β
α−+
αα−
α+α+=β
α−+
α−
α+α+=β
α−−
α−
α+α+=β
(28)
Fig. 8
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17
C 18 C 20
C 21 C 22 C 23 C 24 C 25 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
123
Se verificã deformaþia maximã, care se obþine în punctul 3:
211max
3max
3Δ′
≤⎟⎠⎞
⎜⎝⎛
α−α+
⋅⋅
=δlEKF , (29)
K-factor de corecþie ce þine seama de faptul cã distribuþia de presiuni pe suprafaþa exterioarã nu este perfect simetricã:
( )34.0155.1 −α−=K (30) Δ′ -jocul bolþului în funcþionare (la cald):
( ) bed005.0001.0 ÷=Δ′ .
5.4.7. Determinarea jocului la montaj Se obþine ca diferenþa dintre diametrele interior din umerii pistonului ºi exterior al bolþului în funcþionare (la cald), când acestea se dilatã simultan:
( ) ( )[ ] ( )[ ]00 11 ttdttd bbbeppbe −α+−−α+Δ+=Δ′ , (31)
de unde:
( ) ( )[ ]( )0
00
1 ttttttd
pp
ppbbbe
−α+
−α−−α+Δ ′=Δ ; (32)
pα -coeficient de dilatare termicã liniarã al
pistonului; pt -temperatura pistonului în funcþionare;
0t -temperatura pistonului la rece; bb t,α -coeficientul
de dilatare, respectiv temperatura bolþului; bt -este funcþie de regimul termic.
( )( )
( ) .005.0001.0
10157;150
;200150101216
016
eb
pb
pp
d
Ct
t
÷=Δ
÷=α≅
÷=⋅=α−−
−−
aluminiu; pentru grd
C fontã;pentru grdo
5.4.8. Temperatura minimã a pistonului pentru
montarea bolþului flotant Se pune condiþia ca diametrul interior al umerilor pistonului dupã dilatarea produsã în urma încãlzirii acestuia pentru montaj sã fie minim diametrul exterior al bolþului: ( ) ( )[ ] ebpbe dttd =−α+Δ+ 0min1 , (33)
de unde:
( ) 00min td
ttebp
>Δ+α
Δ−= ; (34)
( ) Ct o12080min ÷= ; jocul Δ din (34) este negativ (strângere).
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1
C 18 C 20
C 21 C 2C 2C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5
Fig. 8

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 124
6. Construcþia ºi calculul segmenþilor Segmenþii sunt organe de etanºare a cilindrului, care se monteazã în canalele port-segmenþi ale pistonului.
6.1. Rol funcþional Segmenþii îndeplinesc urmãtoarele roluri:
• împiedicã scãparea gazelor rezultate în urma arderii în carter (segmenþi de compresie), ca ºi pãtrunderea uleiului de ungere a cãmãºii spre spaþiul de ardere (segmenþi raclori), asigurând astfel dubla etanºare a cilindrului;
• segmenþii de compresie au rolul suplimentar de a prelua o parte din fluxul termic transmis de la gaze cãtre piston, cel mai solicitat fiind primul segment (segment de foc);
• asigurã distribuirea uniformã a uleiului pe oglinda cãmãºii cilindrului.
Pentru a asigura o bunã etanºare, segmenþii trebuie sã calce cât mai perfect pe cãmaºa cilindrului. În funcþionare este posibil ca segmentul sã fie aplicat cu suprafaþa frontalã (Sf) ºi pe peretele superior al canalului; Sl este suprafaþa lateralã,
( ) mm31÷=Δa jocul axial, ( ) mm25.0 ÷=Δ r jocul radial (fig. 1). Aceasta face obligatorie existenþa jocurilor, adicã segmentul este liber în canal ºi conduce la fenomenul de pulsaþie a segmentului în canal. Segmentul dezvoltã presiune elasticã pe faþa lateralã dacã ºi numai dacã diametrul în stare liberã va fi mai mare decât cel exterior în stare montatã. Segmentul se construieºte ca un inel tãiat; distanþa dintre capete se numeºte rost (fantã); dacã D0 este diametrul exterior în stare liberã, D diametrul exterior în stare montatã, Di diametrul interior în stare montatã, h înãlþimea segmentului, a grosimea radialã, mSS iº0 rosturile în stare liberã, respectiv montatã, avem (fig. 2):
mi SSDDaDD >>−= 0 ; 0;2 (1) • Etanºarea la gaze Datoritã faptului cã segmentul este liber în canal, se produce efectul de labirint, cu ajutorul cãruia se face o bunã etanºare ºi constã în cãderi mari de presiune cauzate de rezistenþe hidraulice mari, datoritã geometriei canalelor. O etanºare bunã la gaze constã în penetrarea în carter a unui volum de gaze sub 1% din cantitatea ce se gãseºte în cilindru, cu presiunea sub 2-3% faþã de presiunea de gaze din cilindru (fig. 3). Un fenomen nedorit în funcþionare, ce afecteazã randamentul motorului este alinierea segmenþilor. • Etanºarea la ulei Etanºarea la ulei este realizatã de segmenþii de ungere. Menþionãm cã aceºti segmenþi nu sunt organe de ungere, ci sunt organe de distribuþie a uleiului pe cãmaºa cilindrului. În orice situaþie, o
cantitate cât de micã de ulei va pãtrunde în camera de ardere. Acest ulei va arde, conducând astfel la formarea depunerilor. La aceasta contribuie douã fenomene: • fenomenul de pompaj al uleiului, realizat de
segmenþi datoritã pulsaþiei lor în canal; • fenomenul de ungere hidrodinamicã, realizat
datoritã variaþiei presiunii uleiului pe înãlþimea segmentului (efectul de panã).
Δ a
Δr
Sl fs
Sf
Sf
Oglindacilindrului
fi
h
a
S0
Sm
Di
D
D0
D0i
0 20 40 80 100 [%]pt
75%25%20%
7,6%
3,0%
1
2
3
p1
p2
p3
p4
ΔaΔr
pcil
Fig. 1
Fig. 2
Fig. 3
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13
C 14 C 15 C 16 C 17
C 18
C 20 C 22 C 23 C 24 C 25
C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
125
6.2. Materiale Materialele utilizate la construcþia segmenþilor trebuie sã îndeplineascã urmãtoarele condiþii: • calitãþi antifricþiune; • duritate mare; • rezistenþã mare la solicitãri termice; • rezistenþã mare la solicitãri mecanice. Unul din materialele cel mai des utilizate este fonta cenuºie perliticã. Pentru motoarele navale, primul segment se mai executã ºi din oþel special.
6.3. Tehnologie de fabricaþie Segmentul se executã dintr-o bucºã tãiatã. Prin
tãierea pentru executarea fantei, segmentul se va tensiona. De aceea se recomandã detensionarea sa prin tratament termic sau termochimic, asigurându-se o distribuþie uniformã de presiuni elastice pe toatã circumferinþa segmentului. Acesta este cazul uzual pentru segmentul rotund în care
( ) 24.025.0 N/mm÷=Ep . Dezavantajul acestui segment rotund este acela cã, datoritã uzurii, va înregistra în timp scãderea presiunii la capete. Soluþia amelioratã o reprezintã segmentul oval. Acesta este segmentul la care, prin tratamente, presiunea la capete se menþine mai mare ( ) 24.025.0 N/mm÷ , iar în rest pânã în
22.0 N/mm .
6.4. Soluþii constructive O atenþie deosebitã, atât în faza de modelare ºi analizã, cât ºi în acelea de testare, dezvoltare ºi exploatare, se acordã simultan regiunii port-segmenþi a pistonului ºi segmenþilor motorului naval modern. Astfel, firma Wärtsilä NSD (New Sulzer Diesel) a recurs, pentru motoarele din seria RTA-C, la acoperirea cu plasmã a segmenþilor superiori, ceea ce conferã o siguranþã suplimentarã pentru funcþionarea cãmãºilor de cilindru noi; segmentul de foc (primul dinspre camera de ardere dintre cei cinci utilizaþi în seria RTA-C), acoperit cu plasmã, se aflã încã în testãri importante, soluþia de acoperire asigurând un interval de minim doi ani de funcþionare sigurã. Uzual, la aceste motoare uzura canalelor de segmenþi se apreciazã prin distanþa dintre segment ºi flancul superior al canalului respectiv, prin aceastã metodã putându-se depista gradul de uniformitate a uzurii ºi de deformare a flancurilor canalului, indiciu ºi pentru necesitatea recondiþionãrii pistonului. Testele efectuate pe motoare cu înãlþime de protecþie a segmentului de foc majoratã au demonstrat ameliorarea performanþelor segmenþilor ºi canalelor din regiunea port-segmenþi (fig. 4, în care segmenþii b, c, d, ºi e sunt neschimbaþi). Forme constructive pentru segmenþii motoarelor RTA sunt redate în figura 5. Soluþia iniþialã K1 prezintã teºituri, ea fiind ulterior înlocuitã cu varian-
ta KN cu muchii rotunjite, iar pentru segmentul de foc cu varianta profilatã KNP cu siguranþã sporitã în funcþionare; sunt ilustrate ºi formele uzuale ale rosturilor. Design-ul segmenþilor ºi materialul acestora sunt vitale pentru buna funcþionare a motorului. Se utilizeazã forme diferite ale secþiunii transversale a segmentului în funcþie de rolul pe care acesta îl îndeplineºte. Astfel, la motorul MAN B&W L27/38 se aplicã pe suprafaþa exterioarã a segmentului de foc un strat crom-ceramic pentru reducerea uzurii cãmãºii. Pistonul motorului Sulzer S20 este prevãzut cu trei segmenþi de compresie ºi un segment raclor, dispunerea acestora pe înãlþimea pistonului fiind prezentatã în figura 6; primii trei au feþele exterioare, de reazem, executate bombat pentru realizarea rodajului ºi pentru a evita honuirea cãmãºii la reviziile de rutinã; acoperirea se face în funcþie de condiþiile de funcþionare: pentru funcþionarea cu combustibil naval de vâscozitate medie (MDO), suprafeþele de sprijin ale segmenþilor se cromeazã; pentru operarea cu combustibil naval greu (HFO), primul segment se acoperã, ca ºi în cazul motoarelor lente din seria RTA, cu plasmã, în timp ce urmãtorii doi segmenþi se cromeazã; flancurile sunt, de asemenea, cromate; ultimul segment, de ungere, va fi ºi el cromat. Comportarea în exploatare a acestor tipuri de segmenþi s-a dovedit mai mult decât satisfãcãtoare.
Fig. 4
Fig. 5
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1
C 18 C 19 C 20
C 2C 22
C 2C 2C 2
C 26 C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 126
Soluþii constructive de segmenþi la care s-a recurs pentru motoarele din seria Wärtsilä 32 ºi Wärtsilä 46 sunt prezentate în figura 7. A fost deja evidenþiatã importanþa performanþe-lor pachetului de segmenþi în fiabilitatea ansamblu-
lui componentelor camerei de ardere. Astfel, s-a acordat o atenþie deosebitã proiectãrii segmenþilor superiori, primii doi fiind concepuþi cu o înãlþime superioarã, ceea ce le conferã o rezistenþã termo-mecanicã deosebitã, coroborat cu optimizarea materialului segmenþilor, în concordanþã cu regimurile de lucru specifice acestor motoare. Ca un prim element de noutate introdus de firma MAN B&W în concepþia segmenþilor menþionãm aºa numitul segment de foc cu control al reducerii de presiune CPR (Controlled Pressure Relief), reprezentat în figura 8. Acest segment are rostul executat prin dubla suprapunere a capetelor, iar cãderea de presiune în lungul primului segment este asiguratã prin orificii de scãpare; în plus, rezistenþa la uzurã superioarã este asiguratã prin acoperire ceramicã. Renunþarea la forma clasicã a rostului (tãieturã oblicã), contribuie ºi ea la reducerea încãrcãrii termice a zonei ºi la o etanºare considerabil îmbunãtãþitã. În plus, mãsurãtorile de temperaturi ale cãmãºii cilindrului au demonstrat existenþa unei distribuþii uniforme a tensiunilor termice circumferenþiale ale cãmãºii cilindrului ºi ale celui de-al doilea segment. Datoritã suprapunerii capetelor segmentului de foc, cãderea de presiune va fi independentã de uzura cãmãºii ºi a segmenþilor, asigurându-se o þinutã tehnicã corectã pe o perioadã îndelungatã de funcþionare. Testele efectuate cu diferite seturi de segmenþi au demonstrat cã atunci când s-au utilizat segmenþi CPR a fost posibilã dimensionarea ariei de scãdere a presiunii în regiunea port-segmenþi ºi a orificiilor de scãpare a gazelor, ajungându-se la durate de funcþionare fãrã intervenþie de peste 20000 ore de serviciu; aceasta s-a obþinut ºi prin inserþia unui strat de bronz-aluminiu, în scopul micºorãrii uzurilor. Un alt element de noutate îl constituie aºa—numitul segment scraper (tip raclor) al pistonului PC (Piston Cleaning), prezentat în figura 9. Rolul sãu este de a curãþa depunerile excesive de cenuºã ºi
Vasa 32 pag. 13
MAN MC fig. 9
Fig. 6
Fig. 7
Fig. 8
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17
C 18 C 19 C 20
C 21 C 22 C 23 C 24 C 25
C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
127
carbon din zona superioarã a pistonului, prevenind astfel contactul acestor depozite cu cãmaºa cilindrului ºi îndepãrtarea lubrifiantului de pe cãmaºã în acele posibile zone de contact. Succesul testelor unor asemenea segmenþi pe motoare S80MC a condus la generalizarea folosirii lor în toatã seria MC.
6.5. Calculul segmenþilor 6.5.1. Solicitãri
• Solicitãri mecanice Rezultanta forþelor axiale (fig. 10):
fsasgspsax FFFFF +++= (2)
( )
⎪⎪
⎩
⎪⎪
⎨
⎧
μ=−=
=
⋅−=
cilfs
ssas
sgs
fps
RFamF
gmF
SppF 21
, (3)
psF -forþa de presiune ce acþioneazã pe flancurile
segmentului, sub acþiunea presiunilor 21 pp iº ; gsF -
forþa de greutate, asF -forþa de inerþie a
segmentului; fsF -forþa de frecare; sm , respectiv sa
masa ºi acceleraþia segmentului în canal; μ -coeficientul de frecare al cuplului segment-cãmaºã cilindru. Rezultanta forþelor pe direcþie radialã este:
rEcil FFR += , (4)
EF -forþa elasticã; rF -forþa de presiune radialã; în
general ps aa ≠ (adicã apare pulsaþia segmentului
în canal, cu consecinþe negative asupra calitãþii etanºãrii), cu pa acceleraþia pistonului; la echilibru:
0=axF , adicã:
fsgspsss FFFam ++= . (5)
Din (4), prin împãrþire cu lS , obþinem:
( )β+=⎟⎟⎠
⎞⎜⎜⎝
⎛+=+= 11 E
E
rErEs p
pp
pppp , (6)
unde Ep -presiunea elasticã dezvoltatã de
segment; rp -presiunea radialã; pentru asigurarea
unei bune etanºãri: ( ).155 ÷=β
• Solicitarea la vibraþii La turaþii critice ale motorului, este posibilã intrarea segmenþilor în vibraþie, situaþie în care se produc scãpãrile maxime de gaze în carter. • Solicitarea termicã a segmenþilor Cel mai solicitat segment din punct de vedere termic este primul segment. Regimul termic al acestuia se situeazã în domeniul ( ) Co250150 ÷ . Fluxul termic este mai pronunþat pe direcþie radialã decât pe direcþie axialã, fiind mult mai accentuat la motoarele de putere mare.
MAN MC fig. 910
Fas
Fps
Fgs
Rcil
+Ffs
p2
pr
Fr
p1
Fig. 9
Fig. 10
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1
C 18 C 19 C 20
C 2C 22
C 2C 2C 2
C 26 C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 128
6.5.2. Determinarea distribuþiei de presiuni radiale
Datoritã simetriei (fig. 11), distribuþia de presiuni este periodicã, deci presiunea elasticã suportã dezvoltare în serie Fourier:
∑∑∞
=
∞
=
ψ′+ψ+=ψ
110 sincos
kk
kkE kpkppp . (7)
Datorita simetriei, coeficienþii 0=′kp , deci:
∑∞
=
ψ+=ψ
10 cos
kkE kppp . (8)
Presiunea în secþiunea ψ datã de (8) genereazã urmãtoarea forþã elementarã:
ψ=ψψ dRhpdF E . (9)
Forþa elementarã (9), integratã de la 0 la π va da o rezultantã, care are douã componente: proiecþia pe y-y va fi nulã datoritã simetriei; deci condiþia de echilibru a segmentului este ca rezultanta de pe x-x sã fie nulã:
∫π
ψ =ψ0
0cosdF , (10)
adicã:
0coscos0
10 =ψψ⎟
⎟⎠
⎞⎜⎜⎝
⎛ψ+∫ ∑
π ∞=
=
dkppRhk
kk , (11)
sau încã:
( ) ( )[ ]∑ ∫
∫ ∑ ∫∞
=
π
π ∞
=
π
=ψψ−+ψ++⋅⇒
⇒=ψψψ+ψψ
10
0
01
00
01cos1cos210
0coscoscos
kk
kk
dkkpp
dkpdp
(12)
Pentru k=1 avem:
02
cos 10
2 =⇒π
=ψψ∫π
pd . (13)
Deci distribuþia de presiuni radiale a segmentului va fi:
∑∞
=
ψ+=ψ
20 cos
kkE kppp . (14)
De aici, presiunea elasticã medie va fi:
00
1 pdpp EE =ψπ
= ∫π
ψ. (15)
Fig. 11
segmentoval
segmentrotund
pEψ
y y
x
x
ψ ψdψ
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17
C 18 C 19 C 20
C 21 C 22 C 23 C 24 C 25
C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
129
6.5.3. Determinarea formei libere a segmentului Pentru a fi elastic, segmentul trebuie sã aibã diametrul exterior în stare liberã mai mare decât diametrul în stare montatã (fig. 1). Poziþia oricãrui punct N0 de pe fibra medie in stare liberã a segmentului (fig. 1,c), rezultã din poziþia N cunoscutã în stare montatã, dacã se cunosc deplasãrile radiale t ºi unghiulare ε date de relaþia:
⎩⎨⎧
ψ−ψ=ε−=
0
0 RRt. (1)
Se determinã în orice secþiune ϕ deplasãrile t ºi ε . Vom folosii ecuaþia diferenþialã a deplasãrii radiale:
EIRM
td
td 2
2
2ψ=+
ψ, (2)
unde ψ -unghiul într-o secþiune variabilã; ψM -
momentul încovoietor în secþiunea ψ , dat de presiunea elasticã a segmentului; R -raza la fibra medie în stare montatã; E -modulul de elasticitate longitudinalã; I -momentul de inerþie axial a secþiunii transversale. Vom calcula în continuare momentul ψM . Se
considerã segmentul în stare montatã la fibra medie, unde ϕdF este forþa elementarã din
secþiunea variabilã ϕ , [ ]πψ∈ϕ ; , conform figurilor 1,a ºi 1,b:
ϕ=ϕϕ dRhpdF E , (3)
de unde momentul încovoietor elementar generat este:
( ) ϕψ−ϕ⋅⋅=⋅=ϕϕϕ dphRMNdFdM E sin2 , (4)
iar momentul total în secþiunea de calcul va fi:
( )
( ) ( ) .sincos
sin
20
2
2
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
ϕψ−ϕ⎥⎥⎦
⎤
⎢⎢⎣
⎡ϕ+=
=ϕψ−ϕ==
∫ ∑
∫ ∫π
ψ
∞
=
π
ψ
π
ψϕψ ϕ
dkpphR
dphRdMM
kk
E
(5)
Presupunem în cele ce urmeazã:
.constpp EE ==ϕ
, (6)
adicã distribuþia de presiuni radiale la fibra medie a segmentului în stare montatã este constantã. Rezultã cã:
( ) ( )ψ+=ϕψ−ϕ= ∫π
ψψ cos1sin 22
EE hpRdhpRM . (7)
Vom calcula în continuare momentul încovoietor maxim:
( ) RFRFRRhphpRM tEEE ⋅=⋅=== 222 2max , (8)
FE-forþa elasticã pentru care momentul încovoietor este maxim; Ft-forþa necesarã montãrii segmenþilor. Introducem (7) în (2) ºi vom obþine:
( )ψ+⎟⎟⎠
⎞⎜⎜⎝
⎛⋅=+
ψcos1
3
2
2Rp
EIhRt
dtd
E . (9)
Notãm cu:
EpEI
hRB3
= . (10)
Astfel vom avea ecuaþia diferenþialã:
Fig. 1
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1
C 18 C 20 C 21 C 22 C 23 C 24 C 25 C 26
C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 130
( )ψ+=+ψ
cos12
2BRt
dtd
, (11)
cu soluþia:
( )ψψ++ψ+ψ= sin1sincos 21 bBRCCt , (12) unde primii doi termeni reprezintã soluþia generalã, iar al treilea termen este soluþia particularã. Derivând de douã ori relaþia (12), vom obþine b, pe care îl introducem în relaþia (11): 5.0=b . Pentru determinarea constantelor C1, C2 se impun condiþiile la limitã: pentru 0=ψ , secþiunea A sã nu se deformeze, adicã:
.Cddt 00 2 =⇒=ψ=ψ
0 pentru ; Se presupune în
continuare cã deplasarea radialã în secþiunea 0 este egalã cu cea radialã în secþiunea π .
010 =⇒= π Ctt . Deci:
( )ψψ+= sin5.01BRt . (13) Pentru determinarea ecuaþiei diferenþiale a deplasãrii unghiulare ε , se pune condiþia ca lungimea circumferenþialã a segmentului în stare liberã sã fie egalã cu cea a segmentului în stare montatã. Aceastã condiþie se pãstreazã ºi pentru arce elementare corespunzând unor unghiuri elementare în cele douã situaþii:
ψ=ψ RddR 00 (14) Din (1) rezultã: ( ) ( ) ψ=ε−ψ+ RddtR , (14’) de unde, neglijând εtd ( 0≅εtd ):
ψ=⇒ψ=ε−ε−ψ+ψ dRtdεRdtdRdtdRd , (15)
adicã:
( ) ψψψ+=ε dBd sin5.01 , (16) de unde:
( )ψψ−ψ+ψ=ε cos5.0sin5.0B . (17) Ecuaþiile (13) ºi (17) determinã complet forma segmentului la fibra medie în starea liberã. Observaþie: Se calculeazã deplasarea unghiularã la capetele segmentului:
( ) π=π+π=ε⇒π=ψ π BB 5.15.0 . (18) Rostul se calculeazã în stare liberã. S0 va fi:
( ) Eo pEI
hRBRRtRRS4
0 33222 π=π=ε≅ε+=ε= ππππ ,
(19) iar de aici:
hREISpE 4
0
31π
= . (20)
6.5.4. Determinarea grosimii radiale a
segmentului Se exprimã raza la fibra medie în funcþie de grosimea radialã a ºi diametrul exterior al segmentului in stare montatã D :
⎟⎠⎞
⎜⎝⎛ −=−= 1
222 aDaaDR . (21)
Grosimea radialã a se determinã din condiþiile de verificare la încovoiere:
WMi
i =σ , (22)
tensiunea maximã fiind:
aii WM
σ≤=σ maxmax , (23)
Mmax-momentul încovoietor maxim dat de relaþia (8); W-modulul de rezistenþã al secþiunii transversale; I-momentul de inerþie al secþiunii transversale a segmentului faþã de axa sa:
2/aIW = (24)
ºi:
12
3haI = , (25)
de unde:
.
134
14
232
312
20
22
0
402
max
W
aD
Ea
Sπ
aDa
WaES
hREIS
hRM
⋅
⎟⎠⎞
⎜⎝⎛ −
⋅⋅=
=
⎟⎠⎞
⎜⎝⎛ −
π=
π=
(26)
Din relaþiile (23) ºi (26) rezultã:
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18
C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
131
aii
aD
EaS
πσ≤
⎟⎠⎞
⎜⎝⎛ −
⋅⋅=σ 20
max
134
. (27)
În relaþia (20) se introduce (21):
40
44
30
194
116
1231
⎟⎠⎞
⎜⎝⎛ −
π=
⎟⎠⎞
⎜⎝⎛ −
π=
aD
EaS
aDah
EhaSpE (28)
ºi se obþine raportul aS /0 în funcþie de Ep :
EpE
aD
aS
⋅⎟⎠⎞
⎜⎝⎛ −⋅
π=
4
01
49
. (29)
Înlocuim (29) în (27) punând condiþiile la limitã:
2
2
4
131
1
49
34
⎟⎠⎞
⎜⎝⎛ −=
⎟⎠⎞
⎜⎝⎛ −
⋅⋅⎟⎠⎞
⎜⎝⎛ −⋅
ππ
=σaDp
aD
EpE
aD
EEai .
(30) Rezultã deci cã:
E
ai
paD
31 σ+= , (31)
cu ( ) 2N/mm260250 ÷=σai -rezistenþa admisibilã la încovoiere. Valori uzuale sunt: ;3520/ ÷=aD ( )ah 16.0 ÷= ;
pentru jocurile segmentului în canal se aleg valorile: ( ) ( )mmmm. ar 31;250 ÷=Δ÷=Δ
Observaþie: Pentru un motor precizat (la care se cunosc: Eai p,σ ), se poate determina raportul D/a, de unde rezultã grosimea radialã a. Se constatã cã momentul maxim de încovoiere (Mmax), presiunea elasticã (pE) ºi tensiunea maxiσ nu depind de înãlþimea segmentului h. Ultimele observaþii sunt valabile pentru segmentul considerat de presiune constantã.
6.5.5. Verificarea segmentului la montaj Montarea segmenþilor se face cu ajutorul unor dispozitive speciale, prin care la capete se aplicã câte o forþã tangenþialã (Ft), sau un moment de deformare. Se considerã un factor m ce depinde de procedeul de montare ales. Tensiunea de deformare apãrutã este calculatã cu relaþia:
aid aSmσ≤σ⎟⎟
⎠
⎞⎜⎜⎝
⎛−
π=σ max
0max 1
/31
, (32)
în care 1=m pentru modul de montaj din figura 2,a ºi 2=m pentru modul din figura 2,b ºi aσ -
rezistenþa admisibilã: 2450400 N/mm÷=σa .
6.5.6. Verificarea segmentului la dilatare Se introduc urmãtoarele notaþii: Sm-rostul la montaj (la rece); Sc-rostul în funcþionare (la cald);
Dπ -lungimea circumferenþialã a cãmãºii la montaj; ( )mSD −π -lungimea circumferenþialã a segmentului
la montaj; ( ) ( )[ ]01 ttSD ssm −α+−π -lungimea circumferenþialã a segmentului la cald;
( )[ ]01 ttD cilcil −α+π -lungimea circumferenþialã a cãmãºii la cald; avem relaþia:
( )[ ] ( ) ( )[ ] cssmcilcil SttSDttD +−+−=−+ 00 11 απαπ ,(33) de unde rostul la montaj va fi dat de;
( ) ( )[ ]( )0
00
1 ttSttttD
Sss
ccilcilssm −+
+−−−=
αααπ
(34)
unde: st -temperatura în funcþionare a segmentului;
cilt -temperatura în funcþionare a cilindrului; 0t -
temperatura la montaj; sα -coeficient de dilatare
termicã liniarã al segmentului; cilα -coeficient de dilatare termicã liniarã al cilindrului. Valori uzual utilizate sunt:
( ) ( )( )( ) ( )aSDS
ttt
mc
s
cils
42;003.00015.0101210
120100;18013016
000
÷=÷=⋅÷=α
÷=÷=−−−
;grd
C; C
FtM
a b
Fig. 2
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1
C 18 C 20 C 21 C 22 C 23 C 24 C 25 C 26
C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 132
7. Construcþia ºi calculul tijei pistonului
7.1. Rol funcþional Tija pistonului este elementul care face legãtura dintre piston ºi capul de cruce, specific funcþionãrii motoarelor în doi timpi; are rolul de a transmite bielei forþa de presiune a gazelor ºi forþa de inerþie a maselor în miºcare alternativã. 7.2. Materiale, tehnologie de fabricaþie Tija pistonului se executã în mod uzual din oþel carbon de calitate, sau din oþeluri aliate. Se executã prin forjare ºi prelucrare mecanicã ulterioarã prin aºchiere.
7.3. Soluþii constructive În capitolul 4 s-au prezentat ºi soluþiile de montare a tijei de piston; de aceea, în figura 1, s-a preferat prezentarea unui grup piston asamblat, specific motoarelor navale din seria Sulzer RND: 1-segmenþii de compresie; 2-segmenþii de ungere; 3-bolþul capului de cruce; 4-piuliþa de strângere a tijei pistonului, care traverseazã bolþul capului de cruce; 5-ºtift lateral de fixare a tijei de bolþ; 6-conducta mobilã din sistemul telescopic de rãcire a capului pistonului.
În figura 2 se prezintã grupul piston pentru motoarele seriei MAN B&W MC, pentru care se indicã ºi circulaþia agentului de rãcire a capului pistonului; se remarcã existenþa unei flanºe terminale dreptunghiulare a tijei pistonului, asamblarea cu bolþul capului de cruce fãcându-se, în aceastã situaþie, cu ºuruburi de prindere; bolþul capului de cruce nu mai este strãpuns în acest caz.
Fig. 1
Fig. 2
Fig. 1
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18
C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
133
7.4. Calcului tijei pistonului 7.4.1. Schema de calcul, dimensiuni
caracteristice, solicitãri S-au notat, conform figurii 3: S1-suprafaþa de contact dintre tija pistonului ºi alezajul bolþului capului de cruce; S2-suprafaþa de sprijin a tijei de bolþul capului de cruce; S3-suprafaþa de contact dintre piciorul furcat al bielei ºi bolþul capului de cruce; S4-suprafaþa de contact dintre patina capului de cruce ºi bolþul capului de cruce; tl -lungimea tijei, consideratã de la capãtul extrem la suprafaþa de contact cu bolþul capului de cruce; td -diametrul
tijei; ba, dimensiunile flanºei de cuplare a tijei de
bolþul capului de cruce (soluþia din fig. 2); gd -
diametrul gãurii de trecere a tijei prin bolþ: ( ) ( ) ( )( ) .8.07.0
;7121;;3.025.0;5.26.1
tg
ttt
ddb..adbDdSl
÷=÷=≈÷=÷=
Tija pistonului este solicitatã la flambaj, la strivire pe suprafaþa S2, iar porþiunea filetatã este solicitatã la întindere.
7.4.2.Verificarea la flambaj Notãm sarcina de flambaj cu P :
( )cartp ppDFP −== max
2
max 4π
, (1)
cu pF -forþa de presiune a gazelor; D -alezajul
cilindrului; p -presiunea gazelor din cilindru; 2/100 mkNpcart == -contrapresiunea gazelor din
carter. Adoptãm un coeficient de siguranþã la flambaj c ºi notãm sarcina criticã de flambaj cu fP .
Verificarea constã în:
fPcP = , (2)
cu fP dat de relaþia lui Euler:
2
2
ff
lEIP π
= , (3)
unde E-modulul de elasticitate longitudinal; I-momentul de inerþie al secþiunii transversale a tijei;
fl -lungimea de flambaj: presupunând cã tija este
încastratã atât în piston cât ºi în bolþul capului de cruce, vom avea:
2t
fl
l = . (4)
Þinând cont de valoarea:
64
4td
Iπ
= , (5)
din (2), (4) ºi (5) rezultã:
42
4
42 2
464
EπcPl
π d
ldE
cP tt
t
t =⇒ππ
= . (6)
Dimensionarea cu relaþia (6) este corectã dacã se verificã algoritmul: • se calculeazã aria transversalã a tijei cu relaþia:
4
2t
td
Aπ
= ; (7)
Fp
dt
Fp/2Fp/2l1
l
l1
A
A
S4 S3 S2
A-A
dgd eb
h b
S1
Fig. 3
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1C 1
C 2C 2C 2C 2
C 24 C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 134
• se calculeazã raza de inerþie ca fiind:
t
t
AIi = ; (8)
• se calculeazã coeficientul de zvelteþe al
materialului:
il f=λ ; (9)
• se utilizeazã curba fσ funcþie de λ (fig. 4),
specificã fiecãrui material, cu fσ -tensiunea de
flambaj; pσ -limita de proporþionalitate; cσ -limita
de curgere. Se disting urmãtoarele cazuri: • dacã 0λ≥λ ne situãm în zona flambajului
elastic ºi dimensionarea fãcutã cu relaþia (6) este corectã;
• dacã 1λ<λ solicitarea este o solicitare de comprimare simplã:
actA
Pσ≤=σ , (10)
cu acσ -rezistenþa admisibilã la comprimare;
• dacã ),[ 01 λλ∈λ , rezultã cã ne situãm în zona
flambajului plastic în care tensiunea de flambaj se calculeazã cu relaþia Tetmayer-Iasinsky:
λ−=σ baf , (11)
unde: a,b sunt coeficienþi de material.
• se calculeazã în continuare un coeficient de siguranþã:
σ
σ= f
calcc ; (12)
• dacã adoptatcalc cc ≥ , dimensionarea este corectã;
• dacã: adoptatcalc cc < , se reia calculul de la relaþia
(6) în care se majoreazã diametrul tijei.
7.4.3. Verificarea tijei pistonului la strivire Prin verificarea tijei pistonului la strivire se înþelege verificarea suprafeþei de contact dintre tijã ºi bolþul capului de cruce. • în cazul tijei normale (fig. 1 ºi 3), tensiunea de
strivire este:
s
ss A
F=σ , (13)
unde sF -forþa de strivire; sA -aria supusã strivirii:
maxps FF = (14)
ºi
( )
4
22gt
sdd
A−π
= ; (15)
tensiunea maximã de strivire este:
( ) ass
ps A
Fσσ ≤÷= max
max 50.125.1 , (16)
cu tensiunea admisibilã 2/100 mmNσ as = ; pentru siguranþã, în relaþia (16) s-a majorat
maxpF cu ( )%5025÷ ; în cazul în care relaþia (16)
nu se verificã, se majoreazã sA printr-o soluþie tehnologicã în care tija are un guler de diametrul
gD , ceea ce corespunde cazului urmãtor;
• tijã cu guler (flanºã rotundã):
( ) ( ) asgg
pc
dD
Fσ≤
−π
÷=σ
4
50.125.122
maxmax ; (17)
• tijã cu flanºã: când tija pistonului are o flanºã
dreptunghiularã de dimensiuni a ºi b (fig. 2), prin care se face fixarea de bolþul capului de cruce, care în acest caz nu mai este strãpuns, verificarea la strivire se face conform relaþiei de calcul:
( )
asp
s abF
σσ ≤÷
= maxmax
50.125.1. (18)
Co
mp
resi
un
e
Fla
mb
aj p
last
ic
Flambajelastic
0 λ1 λ0 λ
σf
σc
σp
F P
B
A
C
Fig. 4
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18
C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
135
7.4.4. Verificarea la întindere a porþiunii filetate a tijei pistonului
Pentru calcul vom nota cu fd -diametrul filetului
la fund; 1d -diametrul filetului la vârf; tF -forþa de tracþiune; tensiunea de întindere este:
t
tt A
F=σ , (19)
în care aria transversalã supusã tracþiunii este:
4
2f
td
Aπ
= . (20)
Verificarea constã în urmãtoarea comparaþie:
att
tt A
Fσσ ≤= max
max , (21)
unde:
( )∗= agrt FFF ,maxmax , (22)
cu grF -forþa de gripare a porþiunii filetate:
( ) max
2
415.008.0 pDFgr
π÷≈ , (23)
iar *
aF -forþa de inerþie majoratã a pistonului, împreunã cu segmenþii ºi tija pistonului:
( ) ( )λ+ω÷≈ 11.28.1 2* RmF pa ; (24)
tensiunea de tracþiune admisibilã este
2/90 mmN σ at = .
8. Construcþia ºi calculul capului de cruce
8.1. Rol funcþional
Capul de cruce este un organ specific motoarelor navale lente, fãcând conexiunea între tija pistonului ºi piciorul furcat al bielei. Este alcãtuit din bolþ (fus) ºi patinã; aceasta se deplaseazã pe o glisierã care face parte din structura de rezistenþã a motorului.
8.2. Materiale, tehnologie de fabricaþie Se executã în mod uzual din oþel carbon de calitate sau oþel aliat. Se obþine prin forjare ºi prelucrarea ulterioarã a suprafeþelor prin aºchiere.
8.3. Soluþii constructive Una din soluþiile constructive utilizate pentru motoarele navale, este prezentatã în figura 5: Elementele componente sunt: 1-bolþul capului de cruce; 2-piciorul furcat al bielei; 3-ºurub de prindere al capacului piciorului bielei ºi corpul piciorului bielei; 4-tijã piston; 5-opritor al deplasãrii axiale a patinei; 6-patinã; 7-ºurub de prindere între elementele 6 ºi 8; 8-glisierã; 9-tirant; 10-structurã de rezistenþã a motorului; 11-capac pentru oprirea deplasãrii axiale a patinei, opuse celei stopate de 5; 12-ºurub de fixare al capacului 11; 13,14-laine de ghidare a patinei pe direcþie radialã ºi axialã; 15-mecanism balansier de ungere; S1-suprafaþa de contact dintre piciorul furcat al bielei ºi bolþul capului de cruce; S2-suprafaþa de contact dintre patinã ºi bolþ; S3, S4-suprafaþa de contact dintre patinã ºi glisierã. Soluþia constructivã care a fost aleasã în figura de mai jos este cu patinã bilateralã. În practicã poate exista cap de cruce cu patinã monolateralã, sau sfericã.
8.4. Calcului capului de cruce 8.4.1. Schema de calcul, solicitãri
Fig. 5
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1C 1C 2
C 2C 2C 2
C 24 C 2C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 136
• încovoiere a bolþului datoritã forþelor de presiune a gazelor;
• presiune de contact între bolþul capului de cruce ºi piciorul bielei;
• strivirea patinei pe glisiera pe care se deplaseazã datoritã reacþiunii N.
8.4.2.Verificarea bolþului capului de cruce la
încovoiere În figura 3, lungimea suprafeþei de contact dintre piciorul furcat al bielei ºi bolþul capului de cruce este notatã cu 1l . Forþa care solicitã bolþul la încovoiere se calculeazã cu relaþia:
pFF = . (25) Tensiunea de încovoiere este:
y
ii W
M=σ (26)
unde MI-momentul încovoietor:
⎟⎠
⎞⎜⎝
⎛ −=
221llFM i (27)
ºi Wy-modulul de rezistenþã calculat dupã axa y (axa tijei pistonului):
2/b
yy h
IW = , (28)
yI -momentul de inerþie al secþiuni A-A faþã de axa
de simetrie; bh -înãlþimea bolþului; ebd -diametrul exterior al bolþului.
1264
34bgeb
yhdd
I −≅π
(29)
de unde tensiunea maximã de încovoiere este:
( )ai
b
hdeb
p
ih
d
llF
bg
σ≤⋅
−π
−=σ
264
4
12
4
1max
max3
, (30)
cu rezistenþa admisibilã ( ) 2/10030 mmNai ÷=σ .
8.4.3. Verificarea bolþului capului de cruce la presiunea de contact în piciorul bielei
Presiunea de contact maximã este:
abeb
b pdl
Fp ≤=
1
maxmax 2
, (31)
cu presiunea de contact admisibilã în piciorul bielei: ( ) 2/108 mmNpab ÷= .
8.4.4. Verificarea patinei la strivire pe glisierã
• în cazul patinei bilaterale, contactul dintre patinã ºi glisierã se face pe cele douã suprafeþe de lungime '
pb (fig. 6,a):
aspp
s hbN
σσ ≤′
=2
maxmax , (32)
unde: hp-lungimea patinei; bp-lãþimea patinei;
• în cazul patinei monolaterale (fig.6,b) avem:
⎪⎪
⎩
⎪⎪
⎨
⎧
′=σ
=σ
ppsextr
ppextrs
hbN
hbN
2min
2
max1
; (33)
în relaþia de mai sus se calculeazã în douã moduri sσ , deoarece forþa normalã N ce aplicã patina pe glisierã îºi schimbã semnul pe durata unui ciclu.
( ) asextrsextrss σ≤σσ=σ 21max ,max , (34)
cu rezistenþa admisibilã la strivire:
( ) 210350 N/mm.σ as ÷= ; pentru calcule uzuale, se
impune raportul hb / .
bp
b`p
b`p
b p
Fig. 6
a
b
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18
C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
137
9. Construcþia ºi calculul bielei Biela este organul mobil care face legãtura dintre bolþul pistonului sau al capului de cruce ºi arborele cotit, transformând prin miºcarea sa plan-paralelã, miºcarea alternativã a pistonului în miºcare de rotaþie a arborelui cotit.
9.1. Rol funcþional Biela transmite forþa de presiune a gazelor pF
ºi de inerþie a grupului piston aflat în miºcare alternativã
paF de la piston la arborele cotit,
realizând conversia celor douã tipuri de miºcãri prin cea de rototranslaþie specificã acestui organ.
9.2. Materiale Materialul cel mai utilizat este oþelul carbon de calitate sau oþelul aliat. Semifabricatul se elaboreazã prin deformare la cald, de obicei dintr-o bucatã ºi este supus tratamentelor de normalizare, cãlire ºi revenire. Deºi corpul bielei pãstreazã dimensiunile ºi calitatea suprafeþelor semifabricatului, la bielele motoarelor navale moderne, mai ales la cele semirapide, corpul se finiseazã prin lustruire, pentru mãrirea rezistenþei la obosealã. Orificiile din piciorul ºi capul bielei (la acesta din urmã numai dupã prinderea capacului în poziþia de montaj), se procedeazã la prelucrarea prin aºchiere. Existã tendinþa de execuþie bazatã pe turnare din fontã nodularã, sau chiar din aliaj de aluminiu. Bucºa din piciorul bielei se executã din material cu proprietãþi antifricþiune ºi rezistenþã mare la uzurã.
Cuzineþii semicilindrici din capul bielei sunt construiþi dintr-o carcasã din oþel moale, peste care se aplicã, de obicei prin turnare de precizie, un strat antifricþiune, care trebuie sã corespundã solicitãrilor reclamate de condiþiile specifice de funcþionare: rezistenþã mecanicã ridicatã la compresiune, obosealã ºi ºoc; capacitate mare de a încorpora particule dure vehiculate de ulei, pentru diminuarea uzurii abrazive; rezistenþã superioarã la gripare ºi coroziune; coeficient de frecare coborât ºi conductivitate termicã ridicatã, pentru a limita încãlzirea ºi a transmite eficient carcasei cãldura acumulatã; un material antifricþiune utilizat uzual este aliajul pe bazã de aluminiu ºi bronz cu plumb, peste acesta din urmã putându-se aplica frecvent acoperiri, obþinându-se astfel cuzineþi trimetalici.
9.3. Tehnologoie de fabricaþie Se confecþioneazã prin forjare, iar apoi se vor prelucra prin aºchiere suprafeþele de contact (orificiile din piciorul ºi capul bielei). Tehnologia de execuþie a cuzineþilor este urmãtoarea: în piciorul bielei este o bucºã rulatã dintr-o barã de bronz sau de oþel placat cu un strat de bronz de grosime 0.5÷0.6 mm.
9.4. Soluþii constructive Pãrþile componente ale bielei sunt (fig. 1): • piciorul bielei, care se conecteazã pe bolþ; • corpul sau tija bielei; • capul bielei, care se prinde pe maneton; pentru
aceasta capul este secþionat, iar capacul sãu se prinde de corpul bielei prin ºuruburi.
Piciorul bielei corespunde tipului de mecanism motor. Astfel, la mecanismele fãrã cap de cruce, piciorul bielei are formã tubularã ºi este solidarizat cu corpul bielei printr-o razã de racordare ce trebuie sã fie suficient de mare, pentru evitarea concentratorilor de tensiuni. Dacã bolþul este flotant sau fix în umerii pistonului, piciorul bielei se construieºte rigid (fig. 2): cilindric (fig. 2,a) cu o eventualã proeminenþã 1 pentru corectarea masei la motoarele rapide; în picior se preseazã bucºa antifricþiune ºi se practicã ungerea liberã, prevãzând un orificiu pentru accesul uleiului; la interior pot exista locaºuri pentru acumularea uleiului, realizate în variantele: prelucrarea unui canal 2 (fig. 2,b) pe bucºele turnate sau calibrate la rece; echiparea piciorului cu douã bucºe, între care se formeazã spaþiul de acumulare 3; înzestrarea bucºelor rulate din bandã cu ºanþuri 4, executate simultan cu debitarea benzii; uneori, uleiul este transmis printr-o tãieturã din partea superioarã a piciorului (fig. 2,c); în cazul unor încãrcãri mai mari, la motoarele navale semirapide, partea superioarã a piciorului este bombatã (fig. 2,d) sau nervuratã (fig. 2,e,f); aceste construcþii sunt asociate cu ungerea sub presiune ºi, eventual cu rãcirea suprafeþei inferioare a capu-
ªurub de bielã
Corp
Bucºã Picior
1
Cap
Cuzinet
Capac
L
Fig. 1
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1C 1
C 2C 2C 2C 2
C 24 C 25
C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 138
lui pistonului prin jeturile dirijate de pulverizatorul 5. Atunci când bolþul este fix în piciorul bielei, acesta se construieºte rigid, dacã se aplicã montajul cu strângere, sau dacã se folosesc construcþii elastice la care piciorul are o fantã, iar bolþul este strâns cu ºurub perpendicular pe ea, soluþie prezentatã în capitolul 5. Pentru soluþia de motor naval semirapid cu picior sferic, s-a prezentat în capitolul 4 varianta constructivã, împreunã cu pistonul rotitor aferent. La motoarele cu mecanism cu cap de cruce, piciorul bielei este construit din mai multe elemente. Un prim element ar fi capul de cruce, prezentat în capitolul 7, pentru care, în cel de faþã, redãm schematizat doar variantele de montaj cu piciorul bielei (fig. 3): bolþul (traversa) capului de cruce 5, executat din oþel aliat ºi patinele 1, turnate din oþel; patinele pot fi plane sau cilindrice ºi sunt dotate cu strat antifricþiune, care culiseazã pe glisierele 2 ºi sunt unse sub presiune; se poate utiliza o singurã patinã (fig. 3,a). douã (fig. 3,b) sau patru (fig. 3,c);
Fig. 2
Fig. 3
Fig. 4
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18
C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
139
soluþiile cu douã ºi patru patine sunt mai avantajoase, deoarece asigurã suprafeþe de reazem egale, independent de sensul forþei normale N, pe întregul ciclu motor (în cazul unei singure patine, forþa N este preluatã de suprafeþe mai mici, care se sprijinã pe glisierele suplimentare 3), ca atare fiind preferabile la motoarele reversibile; s-au mai notat: 4-tija pistonului ºi 6-biela. Piciorul bielei (fig. 4) are formã furcatã; fiecare braþ al furcii este prevãzut cu un lagãr inferior 1 si un capac 2, pentru articularea cu bolþul capului de cruce; altã soluþie, cu un singur lagãr ºi un singur capac faciliteazã forjarea semifabricatului pentru corpul bielei ºi amelioreazã funcþionarea îmbinãrii cu bolþul capului de cruce, datoritã lagãrului mai lung. Corpul bielei are forma unei tije. Secþiunea lui transversalã, adesea profilatã, este dictatã de solicitarea de flambaj; aceastã solicitare apare atât în planul de miºcare (oscilaþie) al mecanismului motor, în care biela se constituie ca o grindã articulatã la capete, cât ºi în planul perpendicular pe cel precedent (plan de încastrare), în care biela reprezintã o grindã încastratã la capete; comportarea eficientã (paragraful 9.5) la flambaj pretinde ca secþiunea transversalã sã aibã momentul de inerþie în planul de încastrare de patru ori mai mare decât cel din planul de oscilaþie, ceea ce se realizeazã atunci când secþiunea are forma de I (fig. 5,a), cu axa inimii1 (fig. 1) în planul de miºcare, soluþie care asigurã o bunã rigiditate bielei, la o masã relativ micã ºi se aplicã la motoare rapide, semifabricatul fiind matriþat; la dimensiuni mari se recurge la forjare, urmatã de realizarea inimii prin frezare: aria secþiunii se mãreºte de la piciorul bielei spre cap, prin creºterea lãþimii L2 ºi prin menþinerea constanta a lãþimii tãlpilor, grosimii L1 ºi inimii B1. În cazul ungerii bolþului sub presiune, uleiul este vehiculat printr-un canal gãurit în centrul inimii, care este îngroºat la exterior (fig. 5,b), sau nervurat (fig. 5,c); uneori canalul poate fi excentric (fig. 5,d); datoritã diametrului redus al acestui canal de ungere, greu de practicat din punct de vedere tehnologic, uleiul poate fi vehiculat printr-o þeavã exterioarã, soluþie mai puþin fiabilã în exploatare.
La motoarele lente ºi semirapide de puteri mari, corpul bielei are secþiune circularã constantã (fig. 5,e); în acest fel se înlesneºte prelucrarea exterioarã a corpului, crescând rezistenþa la obosealã; uneori, corpul poate fi prevãzut cu canal de ungere (fig. 5, f), sau poate avea secþiune inelarã (fig. 5,g), pentru micºorarea masei; pentru motoare cu mai multe linii de cilindri se poate aplica secþiunea în forma de H (fig. 5,h), cu axa inimii în secþiunea de încastrare, ceea ce permite o racordare mai linã cu capul bielei; unele motoare de puteri mici pot avea corpul de secþiune dreptunghiularã sau în cruce (fig. 5,i ºi j). Capul bielei are o construcþie dependentã de articularea prin care biela ºi cotul arborelui cotit realizeazã mecanismul motor; cel mai frecvent, capul bielei este secþionat, prezentând capac ºi cuzineþi; din punct de vedere al execuþiei, cea mai convenabilã soluþie este separarea capacului de partea superioarã a capului dupã un plan perpendicular pe axa bielei, conform figurii 1. Ca ºi piciorul bielei, capul acesteia este legat cu corpul printr-o zonã de racordare, a cãrei razã trebuie sã asigure o bunã corelaþie între rigiditate ºi masã, realizarea tehnologicã fiind mai dificilã decât la picior, deoarece diametrul fusului maneton pe care se monteazã capul bielei este mult mai mare decât cel al bolþului; tot din acest motiv, se impune limitarea grosimii peretelui capului bielei ºi a gabaritelor sale, condiþionând aºa-numita traiectorie de mandolinã a punctelor extreme ale capului, de care depinde configuraþia carterului în plan transversal. Capul bielei trebuie sã asigure pelicula de ulei între stratul antifricþiune ºi fusul maneton, precum ºi contactul cu carcasa cuzineþilor, pe toatã circumferinþa ºi întreaga lungime, condiþii care impun ca deformaþia totalã sã rãmânã inferioarã jocului cuzineþi-fus maneton, ceea ce se realizeazã printr-o anumitã rigiditate. La motoarele de puteri mari, capul bielei este construit separat de corp, cuprinzând o parte superioarã ºi capacul, asamblate cu aceleaºi ºuruburi (fig. 6); partea superioarã (corpul capului bielei) este dotatã cu un prag care asigurã
Fig. 5
Fig. 6
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1C 1C 2
C 2C 2C 2
C 24 C 25
C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 140
centrarea ºi previne solicitarea ºuruburilor prin forþe transversale; între corpul bielei ºi partea superioarã a capacului se monteazã o garniturã (lainã), cu grosimi 5÷20 mm, pentru realizarea raportului de comprimare necesar. La motoarele cu mai multe linii de cilindri ºi un singur arbore cotit, capul bielei prezintã anumite particularitãþi, datoritã faptului cã fiecare fus maneton al arborelui cotit este acþionat de mai multe biele; la motoarele în V se utilizeazã uzual mecanismul cu biele alãturate (fig. 7), capul bielei fiind construit ca la motoarele în linie, dar are lungimea bbc < , cu b -lungimea piciorului, spre deosebire de motoarele în linie, limitându-se, în acest fel, lungimea fusului maneton ºi asigurându-se rigiditatea necesarã a arborelui cotit. Alte soluþii pentru motoarele în V sunt redate în figurile 8 ºi 9; în prima se prezintã ambielajul în furcã, mecanismele lucrând prin interferenþã: în afara complexitãþii constructive a capului bielei în furcã 2, se remarcã lungimea mai micã a capului bielei centrale; ambele biele lucreazã pe cuzineþii 1, prevãzuþi cu material antifricþiune atât la interior, cât ºi la exterior; în cea de-a doua figurã se prezintã mecanismul cu biele articulate (bielã principalã ºi bieletã), la care capul bielei principale 1 are capac (fig. 9, b ºi c), fiind mai rar nesecþionat ºi prevãzut cu locaºuri pentru articularea bielelor secundare 2; capul acesteia este nesecþionat ºi se articuleazã
Fig. 7
Fig. 8
Fig. 9
Fig. 10
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 20
C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
141
prin intermediul bolþului 3 ºi al tirantului 4. Figura 10 prezintã simplificat soluþia constructivã a bielelor articulate ale motoarelor în stea. Un tip special de biele îl prezintã ºi mecanismul motor cu pistoane opuse (ex.: motorul naval Doxford). Cuzineþii bielei sunt, uzual, construcþii cu pereþi subþiri, în varianta fãrã guler sau cu guler (fig. 11, a ºi b); în ambele variante, suprafaþa de lucru poate fi prevãzutã cu un canal 5 pentru acumularea uleiului. Dacã bolþul pistonului este uns sub presiune, se prevede orificiul 6 (eventual ºi la cuzinetul din capul bielei, pentru a unifica fabricaþia), prin care se transmite uleiul; rotirea cuzinetului este împiedicatã de pintenul 1, care pãtrunde la montaj într-un locaº din capul bielei. Carcasa 4 se executã din bandã de oþel; stratul antifricþiune 3 se aplicã pe bandã dupã curãþirea ei, mecanicã ºi chimicã; grosimea stratului antifricþiune se ia 0.15÷0.25 mm, ceea ce asigurã cuzinetului o durabilitate corespunzãtoare; dupã depunerea stratului antifricþiune, se taie banda ºi se realizeazã cuzinetul prin arcuire; suprafaþa de lucru a cuzineþilor destinaþi aceluiaºi fus se finiseazã dupã fixarea lor în poziþia de montaj, iar uneori suprafaþa exterioarã se protejeazã anticoroziv prin cadmiere.
Soluþiile prezentate pentru bielã ºi componentele sale vor fi ilustrate, în cele ce urmeazã, pentru câteva motoare navale uzuale. Astfel, pentru motorul naval MAN B&W din seria MC, figura 12 redã biela asamblatã, împreunã cu capul de cruce. Pentru acest motor, se evitã o înãlþime prea mare a motorului printr-o bielã relativ scurtã. Capul bielei este suficient de larg pentru a
Fig. 10
Fig. 11
Fig. 12
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1C 1C 2
C 2C 2C 2
C 24 C 25
C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 142
permite utilizarea aºa-numitului aliaj alb antifricþiune, sau a aliajului staniu-aluminiu depus galvanic pentru alezaje reduse ale capului bielei. Soluþia de patinã flotantã eliminã o bunã parte din efortul necesar alinierii reclamate uzual de motoarele cu cap de cruce. Lagãrele din capul bielei sunt prevãzute cu cuzineþi din material antifricþiune (metal alb). Pentru motorul Sulzer RND90, prezentãm, în figura 13, desenul de execuþie, cu precizarea unor elemente de asamblare a componentelor bielei. Lagãrele bielei motorului lent din seria RTA-C al firmei Sulzer au fost concepute, în ciuda distanþei reduse dintre axele a doi cilindri consecutivi, cu încãrcãri minime posibile (aºa numitul concept low relevant bearing loads), ceea ce conduce la un comportament corespunzãtor în funcþionare: figura 14-încãrcarea lagãrului din capul bielei motoarelor RTA, WM=white metal, metal alb antifricþiune, figura 15-încãrcarea lagãrului capului de cruce (din piciorul bielei), figura 16-grosimea minimã a filmului de lubrifiant din lagãrele capului de cruce ºi figura 17-diagrama cartezianã a forþelor din lagãrul capului de cruce, aferentã motorului RTA96C; conceptul menþionat anterior este de fapt o combinaþie dintre factorii cei mai importanþi ce concurã la conturarea comportamentului dinamic al lagãrului, cum ar fi grosimea minimã a filmului de lubrifiant în lagãre, gradientul de presiune în pelicula de ulei de ungere, presiunea localã maximã în film ºi presiunea specificã în lagãr, ultimul factor fiind, în soluþiile clasice, considerat ca unicul criteriu în dimensionarea lagãrelor. Pentru comparaþie, s-au considerat mai multe motoare tip RTA; baza de comparaþie (100%) se
referã la motorul cu încãrcare maximã. Referitor la capul de cruce al motoarelor RTA, acesta este proiectat astfel încât semicuzinetul inferior sã se extindã pe toatã lungimea lagãrului, având forma de cadã (bathtub), materialul fiind strat subþire de aliaj alb adecvat sarcinilor mari (fig. 18). Motoarele Sulzer lente utilizeazã o soluþie specificã de ungere a capului de cruce, astfel încât se asigurã ungere hidrostaticã capabilã sã dezvolte o portanþã considerabilã fusului capului de cruce; principalul criteriu de proiectare constã în faptul cã forþa hidrostaticã creatã de presiunea uleiului ridicã bolþul capului de cruce de pe cuzinet în fiecare rotaþie, astfel încât în interstiþiul format sã poatã pãtrunde o peliculã suficient de groasã de ulei la acþiunea forþei de presiune a gazelor (fig. 19 ºi 20). La motorul RTA96C, testat în multiple scopuri de investigare experimentalã, chiar în condiþiile unei solicitãri din partea gazelor de ardere mai înalte, portanþa superioarã este asiguratã de faptul cã motorul funcþioneazã la turaþia de 100 rot/min la punctul R1 (MCR=maximum continuous rating) din domeniul de lucru având o reducere îngustã a sarcinii, la turaþia de 90 rot/min caracteristicã punctului R3, la acestea adãugându-se ºi scurtarea relativã a bielei la trecerea de la seria de bazã RTA84C la RTA96C. Sintetizând, problemele pe care le ridicã lagãrul din piciorul bielei motorului în doi timpi sunt urmãtoarele: vectorul rezultantei din lagãr este totdeauna îndreptat spre partea inferioarã, deci lagãrul nu suportã nici o descãrcare din partea forþelor de inerþie, aºa cum se întâmplã la motorul în patru timpi; miºcarea organului este alternativã, nepermiþând ungerea hidrodinamicã efectivã; dura-
Wartsila RTA-C fig. 22
Wartsila RTA-C fig. 23
Fig. 14
Fig. 15 Fig. 13
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18
C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56
Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
143
ta de încãrcare cu sarcini mari, în care se poate produce strivirea filmului de lubrifiant, creºte cu scãderea turaþiei (fig. 19). Soluþia adoptatã a fost aceea de ridicare a fusului capului de cuce prin creºterea presiunii hidrostatice a uleiului de ungere în gama 12÷16 bar; ridicarea fusului se realizeazã în apropierea vârfului de presiune ºi conduce la creºterea capacitãþii portante a lagãrului. În continuare, s-a calculat forma cavitãþilor din cuzinet pentru acumularea hidrostaticã a uleiului, în scopul atingerii capacitãþii portante optime ºi a pierderilor minime de ulei (fig. 20).
În cazul motoarelor navale semirapide de puteri mari, datoritã diametrului impus al fusului maneton, capul bielei nu poate avea un singur plan de secþiune, deoarece nu ar permite extragerea pistonului în cazuri de necesitate a reparaþiei acestuia. De aceea, pentru capul bielei motorului naval în patru timpi se prevede o soluþie specificã mai degrabã motoarelor lente, cu douã plane de separaþie (fig. 21); ºuruburile de bielã sunt strânse hidraulic; soluþia conferã ºi o bunã manevrabilitate în situaþii de revizie a întregului sistem chiulasã, cãmaºã, piston ºi bielã, ce poare fi extras complet, astfel încât capul bielei sã rãmânã pe arborele cotit; cuzineþii se caracterizeazã prin grosime redusã, iar filmul de lubrifiant prin grosime mare, corespunzãtoare unor încãrcãri moderate. Soluþia de bielã cu picior sferic, corespunzãtor aceleia de piston rotativ, prezentatã deja, se aplicã pe scarã largã, datoritã avantajelor menþionate la grupul piston; astfel, întâlnim aceastã soluþie la motoarele în patru timpi ale firmelor MAN B&W, Sulzer, Pielstick, Värtsilä, etc.
Wartsila RTA-C fig. 25
Wartsila RTA-C fig. 26
High Tech Lustgarten fig. 21
.
.
Fig. 17
Fig. 20
Fig. 16
Fig. 18
Fig. 19
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1C 1C 2
C 2C 2C 2
C 24 C 25
C 2C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 144
Firma Värtsilä aplicã soluþia tehnologicã a cuzineþilor groºi (thick-pad bearing technology), care constã în urmãtoarele: grosime amplã a filmului de lubrifiant; rezistenþã sporitã la coroziune; soluþia este rigidã radial, atât la acþiunea forþelor de presiune a gazelor, cât ºi a celor de inerþie; dispunere judicioasã a orificiilor ºi locaºurilor pentru lubrifiant, fãrã a afecta ungerea; presiuni reduse la capetele lagãrului. Soluþia este prezentatã în figura 21, iar prezenþa operatorului pune în evidenþã mãrimea bielei; pentru motoarele în V Wärtsila V26 ale aceleiaºi firme prezentãm, în figura 22, soluþia de articulare alãturatã a bielelor pe maneton. Firma Sulzer acordã ºi ea o mare atenþie problemei lagãrelor de bielã. Acestea se testeazã pe bancuri de probã speciale; în urma încercãrilor de anduranþã efectuate pe banc pentru lagãrele din capul bielei motoarelor semirapide din seriile A, AS ºi Z, s-a dezvoltat o nouã generaþie de lagãre, pentru care s-a renunþat la încãrcarea tradiþionalã a cuzineþilor (fig. 23), obþinându-se un comportament foarte bun în exploatarea de duratã a motorului. Pentru biela motorului S20 s-a selectat soluþia cu plan oblic de separaþie a capului bielei, ceea ce permite, din punct de vedere tehnologic, extragerea prin cilindru a bielei în caz de necesitate a reparaþiei sale, iar din punctul de vedere al solicitãrilor, descãrcarea ºuruburilor de bielã, care sunt întinse hidraulic cu un dispozitiv special; deoarece componenta axialã a forþei de întindere ce solicitã capacul va supune ºurubul la întindere, rãmâne ca cealaltã componentã, cea transversalã, sã se descarce prin intermediul unor renuri; figura 24 indicã tensiunile dinamice mãsurate în diverse zone ale bielei (planul de separaþie cu renuri, corp, cap ºi ºuruburi de bielã), comparativ cu limitele admisibile la obosealã; mãsurãtorile au fost efectuate la puterea de 160 kW/cilindru ºi turaþia de 1000 rot/min.
Vartsila 64 pag. 9
Sulzer S20 fig. 19
Fig. 22
Fig. 23
Fig. 24 Fig. 21
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 20
C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
145
9.5. Calculul bielei 9.5.1. Calculul piciorului bielei
Piciorul bielei este solicitat la întindere, comprimare, obosealã, fretaj datoritã montãrii cu strângere a bucºei ºi la ovalizare. Schema de calcul este redatã în figura 1, în care s-au introdus notaþiile: b-grosimea piciorului bielei; h-înãlþimea piciorului bielei; id -diametrul la interior;
ed -diametrul la exterior; r—raza la fibra medie; bh -
grosimea bucºei din piciorul bielei; ebd -diametrul
bolþului la exterior; ( ) ;7.13.1 ebe dd ÷=
( ) ebdh 2.018.0 ÷= .
9.5.1.1. Calculul la întindere Forþa de întindere se calculeazã cu relaþia:
( )λ+ω== 12max RmFF papt (1)
unde apF -forþa de inerþie a grupului piston; pm -
masa acestuia. Pentru a facilita calculele, se vor considera urmãtoarele ipoteze simplificatoare:
• se considerã piciorul bielei ca o grindã circularã cu raza r-raza fibrei medii;
• se considerã grinda încastratã, secþiunea de încastrare fiind secþiunea de racordare dintre picior ºi tijã; notãm Iϕ -unghiul de încastrare;
• forþa de întindere se considerã distribuitã uniform pe jumãtatea superioarã a grinzii circulare (fig. 2).
În figura 2, p este forþa distribuitã uniform pe jumãtatea superioarã raportatã la unitatea de lungime. Valoarea sa se determinã din condiþia de echivalenþã:
∫π
=ϕϕ=2/
02cos2 prprdFt . (2)
Rezultã cã:
.2
constr
Fp t == (3)
Problema astfel prezentatã este static nedeterminatã; nedeterminarea se poate ridica dacã secþionãm grinda circularã dupã axa de simetrie (axa verticalã) ºi înlocuim jumãtatea înlãturatã cu un moment încovoietor ºi o forþã de întindere conform figurii 2,a. Se determinã în continuare momentul încovoietor ºi forþa normalã într-o secþiune oarecare a grinzii circulare la secþiunea ϕ . Pentru aceasta, se considerã o secþiune curentã ψ ºi variaþia
unghiularã infinitezimalã ψd ; [ ]ϕ∈ψ ,0 .
( ) ( )
( )⎪⎪⎩
⎪⎪⎨
⎧
ψ−ϕψ+ϕ=
ψ−ϕψ−ϕ−+=
∫∫
ϕ
ϕ
ϕ
ϕ∩
0
000
;sincos
;sincos1:
prdNN
rprdrNMMAB
tt
ttt
(4)
b
d ed i
d ebh b h
φΙ φΙ+
+σintt
σextt
φΙ
+
φ
ρΙ
Ι
M0N0
A
B
r
C
Fig. 1
Fig. 2
b
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1C 1C 2
C 2C 2C 2
C 24 C 25 C 26
C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5
a

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 146
ºi
( ) ( )
( )⎪⎪⎩
⎪⎪⎨
⎧
ψψ−ϕ+ϕ=
ψψ−ϕ−ϕ−+=
∫∫
π
ϕ
π
ϕ∩
2/
00
2/
0
200
;sincos
;sincos1:
dprNN
dprrNMMBC
tt
ttt
(5) În relaþiile (4) ºi (5), tM 0 ºi tN 0 sunt necunoscute; se vor determina din urmãtoarele condiþii la limitã: • secþiunea de încastrare rãmâne nemodificatã
dupã deformaþie; rezultã cã: .constI =ϕ , deci vom avea:
00
=ϕ∫ϕ
ϕdMI t , (6)
• se considerã cã sãgeata în punctul A pe direcþia
lui tN0 (orizontalã), rãmâne nemodificatã prin înlocuirea celei de a doua jumãtãþi:
00 0
=ϕ∂
∂∫ϕ ϕ
ϕ dN
MM
I
t
tt , (7)
relaþii din care ((6) ºi (7)) rezultã tM 0 ºi tN 0 .
Forþa de întindere tNϕ se considerã cã este
preluatã atât de piciorul bielei, cât ºi de bucºa din picior. Rezultã cã:
tb
tp
t NNN +=ϕ , (8)
cu t
pN -forþa preluatã de piciorul bielei; tbN -forþa
preluatã de bucºã:
ttp kNN ϕ= , (9)
cu k—procentul de forþã preluatã de bielã. În general forþa de întindere este:
EAAN ε=σ= , (10) cu σ -tensiunea de întindere; A—aria secþiunii pe care acþioneazã forþa normalã N; ε -deformaþia relativã; E—modulul de elasticitate longitudinal. Se face ipoteza cã deformaþia relativã a piciorului ºi a bucºei sunt egale:
ε=ε=ε bp . (11)
Se þine cont cã materialul piciorului este oþel iar al bucºei este bronz (antifricþiune). Introducem (9), (10) ºi (11) în (8) ºi vom avea:
tb
tp
tp NN
kN
+= , (12)
sau:
bBzpOLpOL AEAE
kAE
ε+ε=ε
. (13)
Rezultã:
p
b
OL
Bz
AA
EE
k+
=1
1, (14)
unde bA -aria secþiunii transversale a bucºei; pA -
aria secþiunii transversale a piciorului:
⎩⎨⎧
⋅=⋅=hbAhbA
p
bb . (15)
Observãm cã solicitarea maximã se produce în încastrare Iϕ=ϕ :
( ) ( )( )⎪⎩
⎪⎨⎧
ϕ−ϕ+ϕ=
ϕ−ϕ−ϕ−+=
ϕ
ϕ
IIItt
I
IIIttt
I
prNN
prrNMM
cossincos
cossincos1
0
200
.(16)
Astfel tensiunile de întindere în fibra interioarã sau exterioarã într-o secþiune curentã va fi:
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
+′
−=σ
+=σ
ϕϕ
ϕϕ
p
t
p
tt
p
t
p
ttext
AN
kWM
AN
kWM
int
, (17)
cu pp WW ′, -modulele de rezistenþã la încovoiere ale
secþiunii transversale a piciorului corespunzãtor fibrei exterioare/interioare ale barei curbe ce se determinã prin analogie cu modulele de rezistenþã ale barelor drepte (de curburã foarte mare), þinându-se cont ºi de poziþia axei neutre:
( )( )( )( )⎪
⎪⎩
⎪⎪⎨
⎧
−−
⋅=′
++
⋅=
hrhrhbhW
hrhrhbhW
p
p
622622
. (18)
În figura 2,b este reprezentatã epura tensiunilor de întindere în fibra exterioarã ºi interioarã. Dupã cum se observã, tensiunea maximã de întindere la fibra interioarã se obþine pe direcþie orizontalã, iar
a
C 2
C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18
C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
147
cea din fibra exterioarã se obþine în secþiunea de încastrare.
9.5.1.2. Calculul la comprimare Forþa de comprimare ce acþioneazã asupra piciorului bielei este:
( )λ+ω−= 12max RmFF ppc . (19)
Ipotezele de calcul sunt identice cu cele de la capitolul 9.5.1.1, cu excepþia celei de-a treia, cF considerându-se distribuitã simetric pe jumãtatea inferioarã a grinzii circulare, conform schemei din figura 3:
( ) ϕ−=π−ϕ= cos2/sin 00 ppp , (20) unde 0p se determinã din condiþia de echivalenþã a forþei Fc cu rezultanta forþei distribuite sinusoidal:
( )
( ) ,2
2cos1
cos2cos2
02/
00
2/
0
20
2/
0
π=ϕϕ+=
=ϕϕ=ϕϕ−=
∫∫∫
π
ππ
rpdrp
drpdprFc
(21)
de unde:
rF
p c
π=
20 . (22)
Nedeterminarea se ridicã ca ºi în cazul anterior, determinându-se momentul încovoietor ºi forþa normalã într-o secþiune oarecare a grinzii circulare la secþiunea ϕ , pe arcele de cerc caracteristice:
( )⎪⎩
⎪⎨⎧
ϕ=
ϕ−+=
ϕ
ϕϕ∩
cos
cos1:
0
0
cc
ccc
NN
rNMMAB (23)
( ) ( )
( )⎪⎪⎩
⎪⎪⎨
⎧
ψψ−ϕ+ϕ=
ψψ−ϕ−ϕ−+=
∫∫
ϕ
πϕ
ϕ
πϕ∩
2/0
2/
200
sincos
sincos1:
dprNN
dprrNMMBC
cc
ccc
(24) Dezvoltând calculele, avem succesiv:
( ) ( )
( )
( )
.cossin2
sin
cossin2
sin2
12coscos21sin2sin
21
22
2sincos2cos1sin2
cossincoscossin
sincossin
20
20
2/ 2/
20
2/2/
220
2/
20
2/
2
⎟⎠⎞
⎜⎝⎛ ϕ+ϕ
π−ϕϕ
π−=
=⎟⎠⎞
⎜⎝⎛ ϕ+ϕ
π−ϕϕ
−=
=⎥⎦
⎤⎢⎣
⎡+ϕϕ+ϕ⎟
⎠⎞
⎜⎝⎛ ϕ+
π−ϕ
−=
=⎥⎦⎤
⎢⎣⎡ ψψϕ−ψψ+ϕ
−=
=⎥⎦⎥
⎢⎣⎢ ψψψϕ−ψψϕ−=
=ψψ−ϕψ−=ψψ−ϕ
∫ ∫
∫∫∫∫
ϕ
π
ϕ
π
ϕ
π
ϕ
π
ϕ
π
ϕ
π
rF
rp
rp
ddrp
ddrp
drpdpr
c
(25) Pentru solicitarea maximã avem Iϕ=ϕ :
( )
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎟⎠⎞
⎜⎝⎛ ϕ+ϕ
π−ϕϕ
π−ϕ=
⎟⎠⎞
⎜⎝⎛ ϕ+ϕ
π−ϕϕ⋅
⋅π
+ϕ−+=
ϕ
ϕ
IIIIc
Icc
IIII
cI
ccc
FNN
rFrNMM
I
I
cossin2
sincos
cossin2
sin
cos1
0
00
,(26)
necunoscutele cc NM 00 , determinându-se din condiþiile la limitã identice cu cele de la capitolul 9.5.1.1.
φIφφI
N0
M0
I I II
σintc
σextc
+
+
-
-
a b
A
B
C
Fig. 3
C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 148
Tensiunea de comprimare se calculeazã cu relaþia:
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
+′
=σ
+=σ
ϕϕ
ϕϕ
;
;
intp
c
p
cc
p
c
p
ccext
AN
kWM
AN
kWM
(27)
Distribuþia tensiunilor de comprimare, pe fibra exterioarã ºi pe cea interioarã, sunt redate in figura 3,b.
9.5.1.3. Calculul la fretaj Bucºa din piciorul bielei se monteazã prin fretaj. Presiunea de fretaj se calculeazã cu relaþia:
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛ν−
−
+
+
ν+−
+
+=
Bz
ibe
ibe
OL
ie
ie
i
tmf
Edddd
Edddd
d
SSp
22
22
22
22, (28)
unde Sm—strângerea la montaj; St—strângerea termicã, datoratã faptului cã bucºa din bronz are coeficientul de dilatare termicã mai mare decât al piciorului bielei din oþel; ν -coeficientul lui Poisson ( )3.0≅ν . Avem:
( )( )0ttdS OLBzit −α−α= , (29) cu Ct o150 = -temperatura de montaj, t temperatura
în funcþionare; OLBz αα , -coeficienþii de dilatare termicã liniarã a materialelor bucºei, respectiv piciorului bielei. Se calculeazã tensiunile la fretaj:
⎪⎪
⎩
⎪⎪
⎨
⎧
−
+⋅=
−⋅=
22
22
int
22
2;
2
ie
ief
f
ie
if
faxt
dddd
p
ddd
p
σ
σ
. (30)
9.5.1.4. Verificarea la obosealã
Datoritã faptului cã solicitãrile anterioare sunt variabile, apare oboseala. Solicitãrile la obosealã se calculeazã pornind de la tensiunile maxime ºi minime:
⎪⎩
⎪⎨⎧
σ+σ=σ
σ+σ=σfext
cext
fext
text
min
max , (31)
de unde media, respectiv amplitudinea tensiunilor sunt:
⎪⎪⎩
⎪⎪⎨
⎧
−=
+=
2
2minmax
minmax
σσσ
σσσ
v
m. (32)
Coeficientul de siguranþã la obosealã:
a
mvk
cc ≥ψσ+σ
γεβ
σ=
σ
σ
−1 , (33)
unde coeficientul de material 20120 ..ψ ÷= , sau se calculeazã cu relaþia:
0
012σ
σ−σ=ψ − , (34)
cu 55.2 ÷=ac -coeficientul de siguranþã la obosealã
admisibil; 01 ,σσ− -rezistenþele la obosealã prin ciclu
alternant simetric, respectiv pulsator; σβ k -
coeficientul concentratorilor de tensiuni; σε -coeficientul dimensional (fig. 4); γ -coeficientul stãrii suprafeþei (fig. 5), depinzând de rezistenþa la rupere. Valori uzuale: ( ) ;102212 25 N/mm..EOL ÷=
( )( ) ( )
( )( ) aliat. otel pentru -
otel; pentru - 2
1
21
1616
25
/400340
/250180
;10110;1018
;150100;00800040
;1;13090;10151
mmN
mmN
grd. αgrdα
Ctmm..S
βN/mm.E
OLBz
om
kσo
IBz
÷=σ
÷=σ
⋅=⋅=
÷=÷=
≈÷=ϕ⋅=
−
−
−−−−
1,00,90,80,70,60,50,40,30,20,10
30 50 70 90 110 130 150σr[10-1 N/mm2]
γ12
3
0,40,50,60,70,80,91,0
10 15 20 25 30 35 45 55 70 100 120180 200 250
d[mm]
ε
45
6
7
Fig. 4
Fig. 5
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18
C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
149
Legenda figurilor 4 ºi 5 este urmãtoarea: 1-ºlefiuire finã; 2-ºlefuire brutã; 3-suprafaþa laminatã cu crustã; 4-oþel carbon fãrã concentratori; 5-oþel aliat fãrã concentratori ºi oþel carbon cu concentratori moderaþi; 6-oþel aliat cu concentratori; 7-oþel aliat cu concentratori foarte mari.
9.5.1.5. Verificarea la deformaþie a piciorului bielei
Notãm cu Δ jocul de montaj din piciorul bielei; condiþia de verificare la deformaþie constã în compararea deformaþiei maxime, care se obþine în punctul B ºi se calculeazã pe baza principiului lucrului mecanic virtual, sã fie mai micã decât jocul diametral, adicã:
( )210
9086
23
0
2
maxΔ
≤−ϕ
==δ ∫ϕ ψ
p
oIt
pOL
t
B EIrF
IEdLM
, (35)
cu dL -elementul infinitezimal de lungime a barei curebe ºi pI -momentul de inerþie al secþiunii
transversale a piciorului:
12
3bhI p = . (36)
C C C C C C C C C
C 1C 1C 1C 1C 1C 1C 1C 1C 1
C 2C 2C 2C 2
C 24 C 25 C 26
C 2C 2C 2C 3C 3C 3C 3C 3C 3C 3C 3C 3C 3C 4C 4C 4C 4C 4C 4C 4C 4C 4C 4C 5C 5C 5C 5C 5C 5C 5

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 150
9.5.2. Calculul corpului bielei În figura 1 sunt prezentate notaþiile utilizate la calculul corpului bielei: L—lungimea corpului bielei; m-m—secþiunea minimã a corpului bielei (de racordare picior corp); Hp—lãþimea corpului bielei în secþiunea m-m; Hc—lãþimea corpului bielei în secþiunea maximã (de racordare corp — cap); M-M—secþiunea medie a corpului bielei; H—lãþimea corpului bielei în secþiunea M-M; o-o—planul de oscilaþie al bielei; c-c—axa de simetrie în planul de încastrare al bielei. Principalele dimensiuni caracteristice sunt:
( ) ( ) .2
;35.11.1;148.0
;583.0;66.0;167.0;75.0
cppcep
HHHHHdH
HeHhHaHB+
=÷=÷=
≈≈≈≈
9.5.2.1. Calculul la întindere
Se calculeazã forþa de întindere în secþiunea minimã m-m, sau în cea medie M-M:
( )λ+ω−=−
12RmF pt mm (1)
ºi:
( ) ( )λ+ω−λ+ω−= ∗−
11 22 RmRmF bpt MM, (2)
unde pm -masa grupului piston; ∗
bm -masa bielei
situate deasupra secþiunii M-M; se aproximeazã:
bpb mm ≈∗ , (3)
cu bpm -masa bielei raportate la piston; deci:
( ) max
2 1 aat FRmFMM
=λ+ω−=−
, (4)
deci practic forþa de inerþie maximã a maselor în miºcare alternativã ( am -suma maselor în miºcare alternativã). Tensiunile de întindere sunt:
MM
tt
mm
tt A
F
A
FMM
MM
mm
mm−−
−
−
−
−=σ=σ :sau . (5)
9.5.2.2. Calculul la comprimare
Valoarea maximã a forþei ce supune corpul bielei la comprimare se regãseºte în vecinãtatea p.m.i., la începutul destinderii:
( )λ+ω−=−
12max
RmFF apc MM, (6)
de unde tensiunea de comprimare:
MM
cc A
FMM
MM−
−
−=σ . (7)
9.5.2.3. Calculul la flambaj
Flambajul nu este o solicitare, ci un fenomen de pierdere al stabilitãþii elastice; acesta se produce în douã plane: planul de oscilaþie o-o ºi planul de încastrare c-c (fig. 2) Se calculeazã tensiunea de flambaj în fiecare plan cu ajutorul relaþiilor lui Euler:
⎪⎪
⎩
⎪⎪
⎨
⎧
π=σ
π=σ
−
−
−
−
MMc
oocf
MMo
ccof
ALEI
ALEI
1
1
2
2
2
2
(8)
în care ccI − -moment de inerþie al secþiunii transversale M-M a corpului bielei, faþã de axa c-c;
ooI − -moment de inerþie al aceleiaºi secþiuni transversale M-M a corpului bielei, faþã de axa o-o;
co LL , -lungimi de flambaj în cele douã plane.
Plan deoscilatie
Plan deincastrare
Fig. 2 Fig. 1
L
m mM M
Hc
o oc
c
Hp
Bo
o
c ca
h H
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18
C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
151
⎪⎩
⎪⎨⎧
=
=
2LL
LL
c
o, (9)
în care s-a considerat cã tija bielei este încastratã în dreptul piciorului ºi liber la cap, pentru planul o-o, respectiv încastratã în picior ºi cap, pentru flambajul în planul c-c. Din considerente de solicitare raþionalã a materialului corpului, se va impune egalitatea tensiunilor de flambaj în cele douã plane:
cf
of σ=σ , (10)
de unde:
ooooc
occ II
LL
I −−− ⋅=⋅⎟⎟⎠
⎞⎜⎜⎝
⎛= 4
2
. (11)
De aici vor rezulta dimensiunile corpului în secþiunea medie.
9.5.2.4. Calculul de verificare la obosealã Solicitãrile anterioare fiind variabile , se va face verificarea la obosealã þinând cont cã ciclul de solicitare este alternant asimetric:
a
mvk
cc ≥ψσ+σ
γεβ
σ=
σ
σ
−1 , (12)
în care valorile extreme ale tensiunilor sunt:
⎪⎩
⎪⎨⎧
σ=σ
σ+σ=σ
t
ofc
min
max , (13)
cu ajutorul cãrora se calculeazã media ºi amplitudinea tensiunilor:
⎪⎪⎩
⎪⎪⎨
⎧
σ−σ=σ
σ+σ=σ
2
2minmax
minmax
v
m, (14)
unde: 1−σ -rezistenþa la obosealã prin ciclul alternant simetric (reamintim semnificaþia indicelui anterior, prin valoarea raportului de asimetrie a ciclului de solicitare 1/ maxmin −=σσ=R ); σβk -
coeficientul concentratorilor de tensiune; σε -coeficient dimensional; γ -coeficientul stãrii suprafeþei; ψ -coeficient de material:
0
012σ
σ−σ=ψ − , (15)
cu 0σ -rezistenþa la obosealã prin ciclul pulsator (corespunzãtor valorii 0=R ). Valori uzuale:
( )5.22÷=ac -coeficientul de siguranþã admisibil;
( ) ( ) /250180;/250180 21
21 mmNmmN ÷=σ÷=σ −−
pentru oþel carbon, respectiv oþel aliat; 1=β σk ; ε ºi γ de la 9.5.1.4.
9.5.3. Calculul capului bielei Capul bielei este solicitat în principal la întindere, solicitãrile de comprimare fiind neglijabile. Aceasta se datoreazã razei mari de racordare dintre cap ºi corp, ceea ce conduce ºi la simplificarea calcului de obosealã.
9.5.3.1. Calculul la întindere Se fac urmãtoarele ipoteze de calcul: • se considerã capul bielei o grindã curbã
continuã, datoritã montãrii cu strângere a capacului;
• grinda are secþiune constantã egalã cu lãþimea capului, iar raza la fibra medie este 2/cdr = , dc fiind distanþa dintre axele ºuruburilor bielei (fig. 3);
• secþiunea periclitatã este cea de încastrare (uzual corespunde cu locaºurile pentru capul ºuruburilor de bielã);
• se considerã cã forþa de întindere se distribuie sinusoidal pe jumãtatea inferioarã a grinzii;
• se considerã cã un procent din momentul încovoietor ºi forþa normalã într-o secþiune oarecare sunt preluate ºi de cuzinetul din capul bielei;
• verificarea la obosealã se rezumã la o verificare a tensiunii maxime de întindere faþã de cea admisibilã.
Forþa distribuitã pe unitatea de lungime într-o secþiune oarecare ϕ va fi:
ϕ=⎟⎠⎞
⎜⎝⎛ ϕ−π
= cos2
sin 00 ppp , (16)
dc
φI
Fig. 3
C 1C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 152
cu ajutorul cãreia se calculeazã forþa de întindere:
( )2
2cos1
cos2cos2
02
00
2/
0
22/
00
πrpdrp
drpprdF
π/
t
=ϕϕ−=
=ψψ=ψψ=
∫∫∫ππ
. (17)
Rezultã cã:
rF
p t
π=
20 , (18)
adicã:
ϕπ
= cos2
rF
p t . (19)
Pe de altã parte, forþa de întindere se poate scrie sub forma:
( ) ( )λ+ω−ω−−= 122 RmRmmF acapacbmt . (20) În relaþia (20), se þine cont de contribuþia simultanã a forþei maxime de inerþie a maselor în miºcare alternativã ºi a forþei de inerþie a maselor ( )capacbm mm − , aflate în miºcare de rotaþie, bmm
fiind masa bielei raportate la maneton, iar cealaltã masã fiind cea proprie a capacului capului bielei. Grinda astfel încãrcatã este static nedeterminatã; nedeterminarea se ridicã prin secþionarea grinzii în planul sãu de simetrie ºi înlãturarea jumãtãþii din dreapta, efectul acesteia fiind reprezentat de momentul încovoietor tM 0 ºi forþa normalã tN 0 , necunoscute. Dezvoltãm expresiile momentului încovoietor ºi forþei normale într-o secþiune curentã ϕ , pornind din extremitatea cea mai de jos, deci vom avea, ca ºi în cazul piciorului bielei, expresii diferite pe prima porþiune (arcul AB, încãrcat cu forþa distribuitã sinusoidal), iar apoi pe cea de-a doua (arcul BC, pe care nu mai existã încãrcare distribuitã):
( ) ( )
( )⎪⎪⎩
⎪⎪⎨
⎧
ψψ−ϕ+ϕ=
ψψ−ϕ−ϕ−+=
∫∫
ϕ
ϕ
ϕ
ϕ∩
00
0
200
sincos
sincos1:
dprNN
dprrNMMAB
tt
ttt
,
(21) prin calcule succesive având:
( ) ( )
( )
( ) =⎥⎦
⎤⎢⎣
⎡−ϕ⋅ϕ+⎟
⎠⎞
⎜⎝⎛ ϕ+ϕ⋅ϕ=
=⎥⎦⎤
⎢⎣⎡ ψψϕ−ψψ+ϕ=
=ψψ−ϕψ=ψψ−ϕ
∫ ∫∫ ∫
ϕ ϕ
ϕ ϕ
12cos21cos2sin
21sin
2
2sincos2cos1sin21
sincossin
20
0 0
20
0 0
20
2
rp
ddrp
drpdpr
ϕϕπ
=ϕϕ= sinsin2
20 rFrp t . (22)
Rezultã:
( )
⎪⎪⎩
⎪⎪⎨
⎧
ϕϕπ
+ϕ=
ϕϕπ
−ϕ−+=
ϕ
ϕ∩
sincos
sincos1:
0
00
ttt
tttt
FNN
rFrNMM
AB (23)
( ) ( )
( )⎪⎪⎩
⎪⎪⎨
⎧
ψψ−ϕ+ϕ=
ψψ−ϕ−ϕ−+=
∫∫
π
ϕ
π
ϕ∩
2/
00
2/
0
200
sincos
sincos1:
dprNN
dprrNMMBC
tt
ttt
(24) Explicitãm ultima integralã din (24):
( )
⎟⎠⎞
⎜⎝⎛ ϕ−ϕπ
π=
=⎟⎠⎞
⎜⎝⎛ ϕ−ϕπ
=ψψ−ϕ∫π
cossin2
cossin22
sin2
02/
0
2
rF
rpdpr
t
, (25)
deci, pe arcul BC, avem:
( )
⎪⎪⎩
⎪⎪⎨
⎧
⎟⎠⎞
⎜⎝⎛ ϕ−ϕπ
π+ϕ=
⎟⎠⎞
⎜⎝⎛ ϕ−ϕπ
π−ϕ−+=
ϕ
ϕ∩
cossin2
cos
cossin2
cos1:
0
00
ttt
tttt
FNN
rFrNMM
BC
(26) Necunoscutele tM 0 ºi tN 0 se determinã din condiþii identice cu cele de la piciorul bielei. Valorile maxime se obþin atunci când Iϕ=ϕ , adicã:
( )
⎪⎪⎩
⎪⎪⎨
⎧
⎟⎠⎞
⎜⎝⎛ ϕ−ϕπ
π+ϕ=
⎟⎠⎞
⎜⎝⎛ ϕ−ϕπ
π−ϕ−+=
ϕ
ϕ∩
IIt
Itt
IItttt
FNN
rFrNMM
BC
I
I
cossin2
cos
cossin2
cos1:
0
00
(27) Se noteazã cu: nm kk , procentele de moment încovoietor ºi forþã normalã preluate de capul bielei (diferenþa pânã la 100%, revine cuzinetului din capul bielei); deci tensiunea de întindere va fi:
c
t
nc
t
mt AN
kWM
k ϕϕ +=σ (28)
în care nm kk , se vor determina similar cu coeficientul din piciorul bielei; Ac-aria secþiunii transversale prin grindã; Wc—modulul de rezistenþã
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18
C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
153
al secþiunii transversale a capului care se determinã þinând cont de poziþia axei neutre.
9.5.3.2. Calculul la obosealã al capului bielei Conform ipotezelor anterioare, în cazul capului bielei verificarea la solicitarea de intindere este acoperitoare:
ac
t
nc
t
mt A
Nk
W
Mk II
Iσ≤+=σ ϕϕ
, (29)
cu rezistenþa admisibilã ( ) 2/150100 mmNa ÷=σ .
9.5.3.3. Calculul de verificare la deformaþie Determinarea deformaþiilor ce apar în capul bielei se calculeazã cu relaþia Mohr-Maxwell-Castigliano, aplicând teorema lucrului mecanic virtual:
( ) ( )ϕ⋅+
=
=ψ==∂∂
==δϕ ∫∫ϕ
ψψ
ϕϕ
fIIE
dF
dMEI
dlMFLy
cuzinc
ct
t
l
t
3
2
0
2
, (30)
unde L—lucrul mecanic de deformaþie; ϕF -forþa de
deformaþie în secþiunea ϕ , iar funcþia din (31):
( ) ( )6
20
10904 −ϕ
=ϕf . (31)
Pentru secþiunea cea mai periclitatã, avem valoarea uzualã 0130=ϕ I , de unde:
( )cuzinc
ct
IIEdF
I −=δϕ
30024.0, (32)
unde E-modulul de elasticitate longitudinal;
cuzinc II , -momentele de inerþie ale secþiunilor transversale ale capului/cuzinetului din capul bielei. Verificare la deformaþie a capului bielei se va face cu ajutorul relaþiei urmãtoare:
2Δ
≤Iϕδ , (33)
în care Δ este jocul dintre cuzinetul capului bielei ºi fusul maneton. Valori uzuale: ( ) md003.00003.0 ÷=Δ ,
cu md -diametrul manetonului.
9.5.4. Calculul ºuruburilor de bielã ªuruburile se dimensioneazã la întindere ºi se verificã la obosealã. Schema de montare a capului bielei este redata în paragraful 9.4. Menþionãm cã
pentru motoarele în doi timpi cu cap de cruce, piciorul furcat al bielei prezentând o soluþie constructivã asemãnãtoare (existã atât corp, cât ºi capac al piciorului bielei), calculul ºuruburilor aferente se face identic cu cel pentru ºuruburile capului bielei. 9.5.4.1. Calculul la întindere al ºuruburilor bielei Solicitarea de întindere se analizeazã cel mai simplu pe baza diagramei forþã-deformaþie (fig. 4). În stare de repaus, la montaj, se noteazã cu 0F forþa iniþialã de strângere (prestrângere); la montaj apar deformaþiile −δs deformaþia de întindere a
ºurubului, −δc deformaþia de comprimarea ansamblului corp-capac al capului, respectiv piciorului de bielã. În timpul funcþionãrii, ºurubul va fi solicitat de o forþã totalã 0FFf ≥ care trebuie determinatã; mai
notãm cu −sF forþa suplimentarã în funcþionare faþã de situaþia de montaj; în funcþionare apare deci o solicitare suplimentarã la întindere a ºurubului, deformaþia totalã de întindere a acestuia fiind:
sss δ>δ+δ ' , (34) iar ansamblul corp-capac va avea o deformaþie în funcþionare:
cc δ<δ ' . (35) Notãm cu '
tF forþa de întindere ce revine unui ºurub în timpul funcþionãrii motorului:
2,1,' == iz
FF it
t , (36)
F f
F 0F s
F`0
δs
δ`s δ`c
δc
CA
E
H
G
B
Dφ
φ
ψ
ψ
F
F`t
Fig. 4
C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18
C 19 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 154
unde =z numãr de ºuruburi (uzual la motoarele în doi timpi 4=z );
itF -forþa de întindere ce
acþioneazã asupra capului bielei (indice =i 1), respectiv piciorului bielei (indice 2=i ):
( ) ( )( )⎪⎩
⎪⎨⎧
λ+ω−=
ω−−λ+ω−=
1
12
22
2
1
RmF
RmmRmF
pt
capacbmat, (37)
cu =pm masa grupului piston; pentru fF avem
urmãtoarea relaþie de verificare, conform figurii 4:
''00 tsf FFFFF +=+= . (38)
În vederea asigurãrii regimului de ungere hidrodinamicã, este necesar sã se realizeze îmbinarea capac-corp etanº, adicã trebuie ca:
'0 tFF > , (39)
sau, mai precis:
( ) '0 32 tFF ÷= . (40)
Din triunghiurile formate, exprimãm segmentele proporþionale cu forþele de interes:
ϕδ=⇒ϕ= tgtg 'ssFBHGH (41)
ºi
ψδ=ψ= tgtg 'sBHEH , (42)
de unde:
( )ψ+ϕδ=′⇒+= tgtg'stFHGEHEG . (43)
Din relaþiile (41), (42) ºi (43) va rezulta:
'ts F
tgtgtgF
ψ+ϕϕ
= . (44)
În general, în solicitarea de întindere, se noteazã cu K rigiditatea (inversul elasticitãþii) unui element supus întinderii:
lAE
lAEAEAFK =
δδ
=εδ
=δσ
=δ
= , (45)
cu δ,F -forþa, respectiv deformaþia de întindere; A -aria secþiunii transversale a elementului; E -modulul de elasticitate al materialului; l -lungimea elementului;
Notãm cs KK , -rigiditãþile ºurubului, respectiv ansamblului corp-capac; aceste rigiditãþi se calculeazã din condiþii constructive, împãrþind reperele respective într-un numãr de componente ºi þinând cont cã elasticitatea unui reper este suma elasticitãþilor componentelor; avem:
⎩⎨⎧
ψ=ϕ=
tgtg
c
s
KK
, (46)
de unde, prin introducerea mãrimilor din (46) în (44), obþinem:
't
sc
ss F
KKK
F+
= . (47)
Introducând notaþia:
cs
s
KKKK+
= , (48)
cu ( )4.02.0 ÷=K ºi cu (40) ºi (47) rezultã forþa în
funcþionare fF din (38):
( ) ( )[ ] '4,0...2,03...2 tf FF += . (49)
9.5.4.2. Dimensionarea ºuruburilor bielei Dimensionarea constã în determinarea diametrelor sd ºi '
sd (diametrul ºurubului la partea filetatã, respectiv nefiletatã); relaþia de dimensionare este:
c
fc
s Fcccd
σ=π
2
12
4, (50)
unde cc -coeficient de siguranþã ce þine seama de eventualele solicitãri la ºoc ale ºurubului;
−1c coeficient ce þine seama de solicitãrile suplimentare ce pot apãrea la strângerea piuliþei;
2c -coeficient ce þine seama de posibilitatea de
curgere a materialului în zona porþiunii filetate; cσ -rezistenþa la curgere a materialului; valori uzuale:
( );31÷=cc ;25.111 ÷=c ;15.112 ÷=c ( )1200600÷=σc 2/ mmN .
Pentru porþiunea nefiletatã, avem, asemãnãtor:
c
fc
s Fcd
σ=π
4
2'; (51)
se observã cã au dispãrut coeficienþi 1c ºi 2c , pentru a nu mãri rigiditatea, obþinându-se un diametru mai mic:
ss dd <' . (52)
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 20
C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
155
9.5.4.3. Verificarea ºuruburilor bielei la obosealã Se precizeazã valorile extreme ale forþelor ce solicitã ºuruburile bielei:
⎩⎨⎧
==
0min
max
FFFF f . (53)
Calculul de verificare se dezvoltã atât pentru porþiunea filetatã (diametrul sd ), cât ºi pentru cea
nefiletatã (diametrul 'sd ):
( )( )
( )( )
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
π=σ′
π=σ
4
4
2'
minmaxminmax
2minmax
minmax
s
s
d
F
d
F
, (54)
iar valorile amplitudinii ºi cele medii ale tensiunilor:
⎪⎩
⎪⎨
⎧
σ+σ=σ
σ−σ=σ
2
2minmax
minmax
m
v, (55)
ºi de aici coeficientul de siguranþã la obosealã:
a
mvk
cc ≥ψσ+σ
εγβ
σ= −1 , (56)
unde ( ) 2
1 /400300 mmN÷=σ− ; ( ) 10 6.15.1 −σ÷=σ ;
;45.2 ÷=ac ;54÷=β k ;18.0 ÷=ε 5.11÷=ψ . Calculele se repetã pentru porþiunea nefiletatã a ºurubului.
C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 156
10. Construcþia ºi calculul arborelui cotit
În procesul de lucru, arborele cotit preia solicitãrile variabile datorate forþei de presiune a gazelor ºi de inerþie ale maselor în miºcare, încãrcãri care solicitã intens organul; acesta este unul vital în buna funcþionare a motorului.
10.1. Rol funcþional Arborele cotit este organul mobil care îndeplineºte funcþiile: • transformã, prin intermediul bielei, miºcarea de
translaþie a pistonului în miºcare de rotaþie; • transmite consumatorului (elice, generator)
momentul motor efectiv generat de forþa de presiune a gazelor;
• însumeazã lucrul mecanic dezvoltat pe fiecare cilindru.
Arborele cotit se compune dintr-o succesiune de coturi în numãr egal cu i (numãrul de cilindri la motoarele în linie) sau i/2 (pentru motoarele cu cilindri în V). La rândul sãu, un cot al arborelui cotit se compune din fus palier, fus maneton ºi braþ. Fusul palier reprezintã, împreunã cu lagãrul din motor, elementul de sprijin prin care se asigurã transmiterea forþelor ºi momentelor de dezechilibru ale motorului cãtre rama de fundaþie ºi de acolo cãtre structura de rezistenþã a motorului. Fusul maneton face legãtura cu restul echipamentului mobil prin intermediul bielei, al cãrei cap se monteazã pe acest fus. Braþele sunt elemente de legãturã între cele douã fusuri. În funcþie de soluþia tehnicã de echilibrare aleasã în prelungirea braþelor (partea dinspre palier) se pot afla contragreutãþi calate corespunzãtor. Partea prin care se transmite momentul motor efectiv consumatorului se numeºte partea posterioarã a arborelui cotit, în timp ce partea opusã se numeºte parte frontalã. La motoarele navale de propulsie ºi, uzual la auxiliare, partea frontalã ºi posterioarã corespund direcþiei prova-pupa. La partea posterioarã se aflã volantul de uniformizare a miºcãrii de rotaþie a arborelui cotit, a cãrei coroanã dinþatã poate intra în angrenare cu virorul. Spre partea frontalã se aflã o roatã dinþatã ce transmite miºcarea cãtre sistemul de distribuþie (arborele cu came). La motoarele semirapide de puteri mici, arborele cotit angreneazã ºi unele agregate de pe sistemele aferente motorului (pompa de ungere, rãcire, agregatul de supraalimentare, etc.). La unele motoare navale, la partea frontalã (capãtul liber al arborelui cotit) se poate monta un amortizor de vibraþii torsionale (uzual de tip Holset), iar la cele moderne ºi pentru vibraþii axiale.
10.2. Materiale ºi tehnologie de fabricaþie Arborele cotit poate fi din oþel sau fontã: • oþeluri carbon de calitate: OLC 35, OLC 45,
STAS 880-80; • fontã perliticã cu grafit nodular; • oþeluri aliate cu Cr, Ni, V, cu rezistenþã la rupere
superioarã, dar mai costisitori. În general, arborii cotiþi ai motoarelor navale se executã din oþel prin forjare, sau din oþel prin turnare liberã sau în matriþe. Arborii obþinuþi prin turnare au avantajele: • avantaj datorat procedeului (mai simplu, mai
rapid, mai economic); • avantaj al materialelor: fonta are calitãþi de
turnare mai ridicate; • proprietãþi antifricþiune. Dupã realizarea tehnologicã amintitã, arborele cotit este supus tratamentelor termice: cãlire prin curenþi de înaltã frecvenþã (CIF), urmatã de revenire ºi normalizare ºi apoi nitrurare (tratamente termochimice).
10.3. Solicitãri Asupra arborelui cotit acþioneazã, cumulat, forþa de presiune a gazelor ( pF ) ºi forþele de inerþie ºi
momentele acestora. Pe componentele arborelui cotit, în principal, aceste solicitãri sunt: • palier: torsiune; • maneton: încovoiere ºi torsiune; • braþ: întindere, încovoiere, torsiune, comprima-
re. Toate aceste solicitãri au un caracter variabil, conducând la instalarea fenomenului de obosealã ºi a fenomenelor vibratorii ale arborelui cotit. 1. Întinderea ºi comprimarea pot fi neglijate, datoritã alegerii uzuale a unei soluþii supradimensionate a arborelui cotit. 2. Încovoierea. Efectul încovoierii este pierderea coaxialitãþii fusurilor palier; o mãsurã a pierderii coaxialitãþii este aºa-numita abatere de la paralelismul braþelor de manivelã. Cauzele acestui fenomen sunt: rigiditatea slabã a braþelor de manivelã ºi uzura lagãrelor. 3. Torsiunea (rãsucirea). Este caracteristicã oricãrui arbore aflat în miºcare de rotaþie. Figura 1 prezintã deformaþiile complexe pe care le suportã un cot de manivelã. Astfel, considerând o manivelã a arborelui cotit asupra cãreia acþioneazã momentul de torsiune variabil zM (fig. 1,a), se constatã cã aceasta are tendinþa sã se deformeze atât torsional, cât ºi în plane paralele cu xOz (deformaþii de încovoiere); acþionând acum asupra fusului maneton cu o forþã yF variabilã, situatã în
planul manivelei (fig. 1,b), se constatã tendinþa de deformare în planul yOz (deformaþii de încovoiere), cât ºi deformaþii axiale, în lungul axei Oz.
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18
C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
157
4. Oboseala. Cele douã solicitãri au caracter variabil, de unde ºi posibilitatea instalãrii oboselii. Finalitatea verificãrii la obosealã constã în compararea coeficientului de siguranþã la obosealã cu un coeficient de siguranþã admisibil:
( )( )( ) ( )a
r
t cc τστσ ≥τσ
τσ=
max
max , (1)
cu indicii σ ºi τ specifici încovoierii, respectiv torsiunii; astfel definit (1), coeficientul de siguranþã este raportul dintre o tensiune rezultatã dintr-o solicitare într-un ciclu teoretic ce reprezintã limita admisibilã a fi atinsã în exploatare ºi solicitarea maximã din ciclul motor. În alegerea soluþiei constructive de arbore cotit se þine cont de factorii ce influenþeazã oboseala:
( )( )
( )
( )( ) ( ) ( )mv
kc
τσψ+τσγε
βτσ
=
τστσ
τσ
−−τσ
11 . (2)
De aici, factorii de care depinde oboseala sunt: • concentratorii de tensiune exprimaþi prin
coeficietul concentratorilor de tensiune ( )τσβk ;
concentratori de tensiune reprezintã orificiul de ungere ºi zonele de racordare dintre braþ ºi fus; influenþa concentratorului se reduce practicând degajãri sau racordãri cât mai mari în zona dintre braþ ºi fus; figura 2 redã influenþa racordãrii asupra lungimii portante a fusului (fig. 2,a, c, d, e) ºi a rezistenþei cotului la obosealã (fig. 2,b); pe de altã parte, este necesarã limitarea razei de racordare ρ din urmãtoarele motive: creºterea ei determinã scãderea lungimii portante a fusului (fig. 2,a), care are mãrimea
( )Δ+ρ−=′ 2ff ll , unde fl -lungimea fusului ºi
Δ -spaþiul de gardã ; peste o anumitã limitã, raza ρ nu mai influenþeazã practic rezistenþa la obo-
sealã (fig. 2,b); racordarea dupã un sfert de elipsã (fig. 2,c) diminueazã la minimum efectul de concentrare a tensiunilor, dar se aplicã rar, deoarece micºoreazã mai mult lungimea portantã ºi este mai dificil de executat; pentru ca
fl ′ sã nu scadã inadmisibil, racordarea este
realizatã adesea prin douã arce de cerc, ale cãror raze cresc de la fus spre braþ (fig. 2,d); mãrirea lungimii fl ′ se obþine când racordarea
se executã cu o degajare bδ în braþ (fig. 2,e), dar soluþia slãbeºte secþiunea braþului, de aceea se utilizeazã mai frecvent racordarea cu degajarea practicatã în fus, care, deºi scurteazã lungimea fl ′ , îmbunãtãþeºte considerabil
rezistenþa la obosealã (fig. 2,c ºi d);
Fig. 1
Fig. 2
C 1C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 158
• forma ºi dimensiunile arborilor exprimate prin coeficientul dimensional ( )τσε ; valoarea sa
depinde de dimensiunile caracteristice; • calitatea suprafeþei ºi procedeele tehnologice
utilizate se exprimã prin coeficientul stãrii suprafeþei γ ;
• natura ciclului de solicitare, exprimatã prin rezistenþele admisibile prin ciclu alternant simetric, respectiv pulsator: ( ) ( )01; τστσ − .
• natura materialului exprimatã prin coeficientul de material ( )τσψ , care se poate scrie în funcþie de
valorile anterioare:
( )( ) ( )
( )0012
τστσ−τσ
=ψ −τσ . (3)
5. Vibraþiile arborelui cotiþi. Deoarece arborele cotit este un sistem elastic, iar solicitãrile menþionate au un caracter variabil, arborele cotit va intra în vibraþie. Principalele tipuri de vibraþii ale arborilor cotoþi sunt: • vibraþii torsionale: se produc într-un plan
perpendicular pe axa de rotaþie; • vibraþii de încovoiere: se produc în planul
cotului; • vibraþii axiale: se produc în lungul axei de
rotaþie. În realitate, aceste tipuri nu apar izolat ci prezintã fenomenul de cuplaj între ele (fig. 1). Limitarea fenomenului vibratoriu se face, în general, prin evitarea funcþionãrii motorului la turaþia criticã (corespunzãtoare frecvenþei proprii de vibraþie a arborelui cotit). Vom prezenta sumar în continuare fenomenul vibratoriu torsional, cel mai frecvent. Notãm
[ ]−ω −10 s frecvenþa proprie de vibraþie a motorului;
pentru evitarea fenomenului de rezonanþã, este de dorit ca turaþia [ ]min/55.9 00 rotn ω≅ sã fie scoasã
în afara zonei turaþiei de lucru a motorului, fie înainte de turaþia minimã a motorului, fie dupã cea maximã. Primul caz este mai dezavantajos, deoarece la fiecare pornire se trece prin turaþia criticã. Pentru determinarea prin calcul a pulsaþiei proprii a arborelui cotit se porneºte, gradat, prin sisteme torsionale oscilante echivalente, de la cel simplu, la cel general. Prima etapã o constituie sistemul oscilant monodimensional, cu un singur disc echivalent unui singur mecanism motor (fig. 3), cu diametrul D, moment de inerþie mecanic J, dat de relaþia:
[ ]22
8kgmmDJ = . (4)
Discul este legat de un perete printr-un tronson elastic fãrã masã, de lungime l ºi diamteru d, cu rigiditate torsionalã:
[ ]Nml
GIC p= , (5)
unde [ ]2/ mNG -modulul de elasticitate transversal,
pI -momentul de inerþie polar al secþiunii
transversale:
[ ]44
32mdI p
π= , (6)
de unde valoarea pulsaþiei proprii a sistemului:
[ ]10
−=ω sJC
. (7)
Etapa urmãtoare o constituie motorul monocilindric (fig. 4), pentru care sistemul oscilant torsional echivalent este format din douã discuri, unul corespunzând mecanismului motor ºi celãlalt volantului; pentru acest sistem oscilant bidimensional, pulsaþia proprie este:
( ) [ ]1
21
210
−+=ω s
JJJJC
. (8)
Pentru sistemul cu 3 discuri (fig. 5) se mai poate determina analitic
0ω ; în acest caz avem doua pulsaþii proprii, corespunzã-toare celor douã moduri de vibraþie specifice. Pentru sisteme n-
Fig. 3
Fig. 4 Fig. 5
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18
C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56
Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
159
Fig
. 6
C 1C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 160
dimensionale, corespunzãtoare motoarelor policicindrice, se considerã întreaga linie de arbori (inclusiv propulsorul); se determinã sistemul oscilant echivalent ºi, prin tehnici de calcul moderne, se determinã cele n-1 pulsaþii proprii, respectiv turaþiile critice, de rezonanþã, corespunzãtoare; figura 6,a prezintã linia de arbori completã a unui motor naval semirapid de propulsie, iar figura 6,b sistemul oscilant echivalent ºi modurile proprii de vibraþie torsionalã. În toate cazurile se constatã cã atunci când masa discurilor creºte (deci ºi J creºte), 0ω scade. Va apare pericolul fenomenului de rezonanþã înainte de atingerea zonei de turaþie nominale a motorului. Scoaterea acestor rezonanþe periculoase se face, conform celor menþionate anterior, în condiþii de exploatarea, prin montarea unui amortizor de vibraþii torsionale; figura 7 prezintã diagrama de turaþii critice a liniei de arbori a motorului Sulzer 6RND90.
10.4. Soluþii constructive 1. Distribuþia coturilor. Coturile sunt distribuite în lungul axei de rotaþie, între ele existând uzual la motoarele navale, câte un fus palier, cât ºi în jurul axei de rotaþie. Aceastã ultimã distribuþie este datã de condiþia uniformitãþii aprinderilor ºi de condiþia unei soluþii optime de echilibrare. 2. Fusurile. Se construiesc astfel ca suprafaþa portantã sa fie cât mai mare; diametrele fusurilor:
ld -diametrul fusului palier ºi md -diametrul fusului maneton sunt egale, pentru cazurile generale (cilindri echidistanþi); lungimile celor douã tipuri de fusuri sunt aproximativ egale: ml ll ≅ , deºi mãrirea
diametrului md majoreazã masele în miºcare de
rotaþie ºi reduce frecvenþele proprii ale arborelui, preferându-se soluþia lm dd < . Lungimile fusurilor palier depind de încãrcarea acestuia; adesea, palierul de mijloc este mai lung decât celelalte, deci nu se mai respectã condiþia echidistanþei cilindrilor, mai ales când arborele cotit nu mai este unitar (este compus din douã bucãþi). Fusurile maneton au aceeaºi lungime ml , datorita identitãþii bielelor prinse direct pe ele; la motoarele în V, lungimea fusului se mãreºte corespunzãtor (capitolul 9). O construcþie simplã se obþine dacã fusurile arborelui cotit nu au canale axiale (cazul uzual al motoarelor navale). Pentru a micºora însã masa arborelui ºi forþele de inerþie, se recurge la gãurirea axialã a fusurilor, ceea ce conduce la ameliorarea comportamentului la obosealã, golurile din lungul fusurilor determinând o distribuþie mai favorabilã a fluxului de forþe, efect ilustrat de figura 8: rezistenþa la obosealã datoratã torsiunii creºte de la forma plinã (fig. 8,a), la cea cu fusuri cu gãuri cilindrice (fig. 8,b ºi c, la aceasta din urmã constatându-se ºi efectul pozitiv al mãririi lãþimii braþului); soluþiile cu goluri în formã de butoi sunt ºi mai eficiente (fig. 8,d, e ºi f), la creºterea rezistenþei la oboseala contribuind ºi lãþirea braþului, pânã la aducerea la forma ovalã. Menþionãm cã prin practicarea gãurii fusului maneton excentric (spre periferia braþului) se atenueazã efectul concentrãrii tensiunilor la trecerea de la forma fusului spre braþ. 3. Braþele. Figura 9 redã câteva forme consacra-te de braþe ale arborelui cotit. La motoarele lente, braþele pot avea formã dreptunghiularã (fig. 9,a), ceea ce asigurã stabilitate construcþiei; pentru reducerea masei, se
50
100
150
200
10 20 30 40 50 60 70 80 90 100 110 120 130 140 150
k=4
k=3
nI5 nI4
k=2
k=1
k=7
k=6
k=8
k=5
k=10
k=9
k=12
k=11
ω[s-1]
ω0II
ω0I
n[rot/min]
25 50 75 100
sarcina[%]
Fig. 7
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18
C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
161
Fig. 8
Fig. 9
C 1C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 162
eliminã însã zonele care nu participã la transmiterea eforturilor (fig. 9, b÷d). Pentru mãrirea lungimii fusurilor (reducerea uzurii), în cadrul distanþei fixate dintre douã coturi consecutive, se recurge la micºorarea grosimii h a braþelor, realizând secþiunea necesarã prin creºterea lãþimii lor b , obþinându-se braþe cu forme ovale (fig. 9,e) sau circular (fig. 9,f), specifice motoarelor navale semirapide, ultima formã asigurând ºi o mai bunã comportare la obosealã. În scopul micºorãrii efectului de concentrare a tensiunilor la trecerea dintre fus ºi brat, fusurile se pot racorda cu braþele, aºa cum s-a prezentat anterior, sau cu praguri intermediare de lãþime p , ca în figura 9,a; prin figura 9,b se indicã ºi o soluþie de strãpungere a braþului în vederea asigurãrii ungerii fusurilor. O influenþã pozitivã asupra rezistenþei la obosealã este datã de acoperirea secþiunilor fusurilor palier ºi maneton (fig. 10); eficienþa soluþiei se apreciazã prin mãrimea s a acoperirii:
Rdd
s ml −+
=2
, (9)
cu R -raza de manivelã; acoperirea se practicã la motoarele navale în patru timpi; creºterea acoperirii conduce la creºterea rezistenþei la obosealã, micºorarea grosimii h , fãrã a mãri lãþimea b . 4. Contragreutãþile. Efectul acestora este contra-dictoriu Aspectul pozitiv este reprezentat de elementele: • se echilibreazã forþele de inerþie ale maselor
aflate în miºcare de rotaþie; • se descarcã palierele intermediare de
momentele interne; • la acelaºi grad de uniformitate a miºcãrii de
rotaþie a arborelui cotit, masa volantului va fi mai micã.
Efecte negative: • prin utilizarea contragreutãþii creºte masa ºi
scade pulsaþia proprie ( )0ω ;
• complicaþia tehnologicã ºi constructivã. Contragreutãþile pot fi demontabile sau pot face corp unic cu braþul. Figura 11 prezintã o soluþie de fixare a contragreutãþilor detaºabile, fixate pe braþele arborelui cu ºuruburi, calate corespunzãtor soluþiei de echilibrare; dacã se practicã prinderea contragreutãþilor prin coadã de rândunicã (fig. 11,a), ºuruburile sunt încãrcate numai de forþa de strângere, contragreutatea fiind prevãzutã cu o tãieturã, pentru mãrirea elasticitãþii; în unele cazuri, ºuruburile sunt solicitate ºi de forþa centrifugã a contragreutãþii ºi se pot descãrca de componenta tangenþiala a acesteia prin praguri (fig. 11,b), danturi triunghiulare (fig. 11, c) sau bucºe de centrare (fig. 11, d); pentru asigurarea ºuruburilor, se prevãd siguranþe de tablã 1, sau puncte de sudurã 2; soluþia cu etrier introdus într-o degajare din braþ ºi strâns cu ºuruburi (fig. 11,e) este mai rar întâlnitã. 5. Ungerea arborelui cotit. Se realizeazã în regim hidrodinamic, lubrifiantul fiind adus sub presiune pe suprafaþa fusurilor. Figura 12 ilustreazã principiul ungerii hidrodinamice a unui fus încãrcat cu rezultanta R distribuitã neuniform pe suprafaþa fusului; iniþial, presiunea în jurul circumferinþei fusului creºte spre zona cu jocul cel mai redus, pentru ca apoi sã scadã ºi sã atingã valori negative
Fig. 10
Fig. 11
R R
Intrare ulei
Fig. 12
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 20
C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56
R

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
163
dupã planul radial determinat de punctul cu joc minim, în apropierea câruia se obþine ºi presiunea maximã; figura ilustreazã ºi distribuþia presiunii filmului de ulei în lungul fusului. Ungerea fusurilor maneton se realizeazã prin intermediul unor orificii de ungere; uneori acestea pot strãbate braþele, asigurându-se ºi ungerea palierelor (fig. 9,b). La unele motoare palierele se ung separat. Orificiul de ungere reprezintã un concentrator de tensiune. Pentru ameliorarea situaþiei, se poate îngroºa peretele fusului în zona orificiului, se poate practica o gaurã excentricã, sau se poate ecruisa marginea orificiului. În toate cazurile se recomandã ca orificiul de curgere sã fie practicat în zona uzurii minime. 6. Lungimea arborelui cotit: Este de dorit o lungime cât mai micã, aceasta prezentând avantajul scãderii masei, deci a creºterii lui 0ω . Lungimea este dependentã de numãrul de cilindri, distanþa dintre ei, alezaj, etc. Efectul negativ al reducerii lungimii este micºorarea suprafeþei de contact a fusurilor în lagãr, cu efecte negative asupra ungerii. Pentru creºterea suprafaþei portante se poate recurge la creºterea diametrului fusului, însoþitã de creºterea masei ºi scãderea lui 0ω . La motoarele auxiliare, creºterea diametrului fusului maneton este limitatã de posibilitatea demontãrii ºi extragerea bielei prin cilindru. O altã posibilitate de creºtere a suprafeþei portante este creºterea lungimii arborelui cotit.
Figura 13 prezintã un arbore cotit al unui motor naval în patru timpi cu i=8 cilindri în linie, puterea de 300 CP ºi turaþia de 275 rot/min, realizat în construcþie forjatã unitarã. Proiectarea arborelui cotit aferent noilor generaþii de motoare din seria Sulzer RTA, cu specificitatea unui raport foarte mare cursã/diametru a ridicat unele probleme tehnice noi. Una dintre acestea este legatã de faptul cã organul este mai zvelt, mai elastic (fig. 14), cu o puternicã distanþare între axele fusului maneton ºi palier (raza de manivelã mare), astfel cã nu a fost posibilã extrapolarea completã a cunoºtinþelor dobândite din seriile de motoare cu cursã scurtã, referitor la formã, rigiditate, etc., la motoare cu raport cursã/diametru mai mari de 3. Obiectivele proiectãrii unui asemenea arbore cotit sunt rezistenþa mecanicã, comportament corespunzãtor la vibraþii, reducerea greutãþii ºi costurilor de fabricaþie. Punctul de plecare în stabilirea formei optime a organului a constituit-o modelarea cu metoda elementelor finite (MEF) a unui cot al arborelui cotit (fig. 15), urmând asamblarea pentru constituirea unui model al întregului arbore al motorului policilindric (fig. 16). Se pot determina tensiunile în zonele critice, cum ar fi cele de racordare braþ-fus. Pentru cazul concret al motorului RTA96C, soluþia îmbunãtãþitã a formei unui braþ al arborelui cotit, faþã de soluþia de bazã RTA84C, este redatã în fi-
Fig. 14
Fig. 13
Fig. 15
C 1C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 164
gura 16. Pentru a ilustra forma constructivã realã ºi dimensiunile de gabarit ale unui asemenea arbore cotit aferent motorului 11RTA96C, executat din douã tronsoane, se prezintã o vedere a reperului respectiv la montaj în figura 18. 7. Echiparea extremitãþilor arborelui cotit. La partea frontalã se monteazã dispozitive compensatoare, absorbitoare, sau amortizoare de vibraþii. Figura 19 redã schema de montaj a unui a-
.
High Tech RTA fig. 15
Fig. 14
Fig. 16
Fig. 17
Fig. 20
Fig. 19
Fig. 18
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 20
C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare
165
Fig. 22
Fig. 21
C 1C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9 C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 20 C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56

Construcþia ºi calculul motoarelor cu ardere internã navale ºi a sistemelor auxiliare 166
mortizor de vibraþii axiale, menþionat în cele anterioare, montat la capãtul liber al arborelui coti al motorului 11RTA96C ºi în rama de fundaþie a motorului, iar figura 20 indicã modificarea domeniului de rezonanþã la vibraþiile axiale ale acestui motor. La extremitatea posterioarã, spre consumator, este prevãzut un montaj pentru volant ºi flanºã de cuplare cu consumatorul. În figura 21 se prezintã un volant tip disc realizat din douã bucãþi ºi prevãzut cu ghidaj inelar pentru antrenarea cu virorul; în figurã s-au notat cu a-buloanele de prindere a celor douã pãrþi; b-bolþuri; c-panã transversalã; d-caneluri; e-canal pentru cheia de tensionare a bolþurilor; f-sector inelar de angrenare cu virorul. Tot în aceastã extremitate a arborelui se aflã lagãrul de împingere (lagãr axial, tip Michell); montajul se face uzuzal, pe un tronson de împingere de pe linia axialã, dupã acesta urmând succesiunea de arbori intermediari ºi finalizând cu arborele port-elice (pentru motor de propulsie); lagãrul axial are rolul primordial de a atenua fluctuaþiile împingerii elicei. Arborele de împingere este deci, uzual, cuplat rigid atât cu arbore cotit, cât ºi cu primul arbore intermediar, iar volantul de uniformizare a miºcãrii de rotaþie a arborelui cotit se monteazã pe acest arbore de împingere; flanºa lagãrului axial forjatã pe arborele respectiv, este situatã între douã rânduri de plãcuþe-cuzinet, de formã identicã, amplasate pe aproximativ ¾ din circumferinþa lagãrului (fig. 22), care preiau, succesiv, forþa axialã provenind fie dinspre motor (plãcuþele dinspre motor), fie dinspre elice (celãlalt rând de plãcuþe) ºi o transmit structurii de rezistenþã a navei prin intermediul ramei de fundaþie a motorului; suprafeþele de contact sunt placate cu metal alb ºi sunt acoperite de uleiul din baia lagãrului, constant umplutã prin sistemul de ungere de joasã presiune.
C 1 C 2 C 3 C 4 C 5 C 6 C 7 C 8 C 9
C 10 C 11 C 12 C 13 C 14 C 15 C 16 C 17 C 18 C 20
C 21 C 22 C 23 C 24 C 25 C 26 C 27 C 28 C 29 C 30 C 31 C 32 C 33 C 34 C 35 C 36 C 37 C 38 C 39 C 40 C 41 C 42 C 43 C 44 C 45 C 46 C 47 C 48 C 49 C 50 C 51 C 52 C 53 C 54 C 55 C 56





























