Embed Size (px)
Citation preview
Seminario de FoundationSeminario de FoundationTMTM fieldbus para ingeniería y fieldbus para ingeniería y proyectosproyectosRicardo Castaneda
Rosemount Inc.
ObjetivoObjetivoObjetivoObjetivo Proporcionar los elementos
básicos al personal de ingeniería y proyectos para la generación de especificaciones consistentes para dispositivos de campo bajo tecnología FoundationTM fieldbus
Proporcionar al usuario los elementos básicos para generar bases de usuario consistentes con las capacidades de los dispositivos actuales en el mercado
ContenidoContenidoContenidoContenido1. Introducción a la tecnología FoundationTM fieldbus
2. Definiciones y abreviaciones
3. Diseño de segmentos y consideraciones
4. Dispositivos de campo y requerimientos básicos
5. Accesorios y dispositivos auxiliares
6. Bloques de función
7. Aplicaciones comunes con bloques de función
8. Mejores Practicas en configuración de lazos
9. Especificación de dispositivos fieldbus
PT
LT
LT
PT
FT
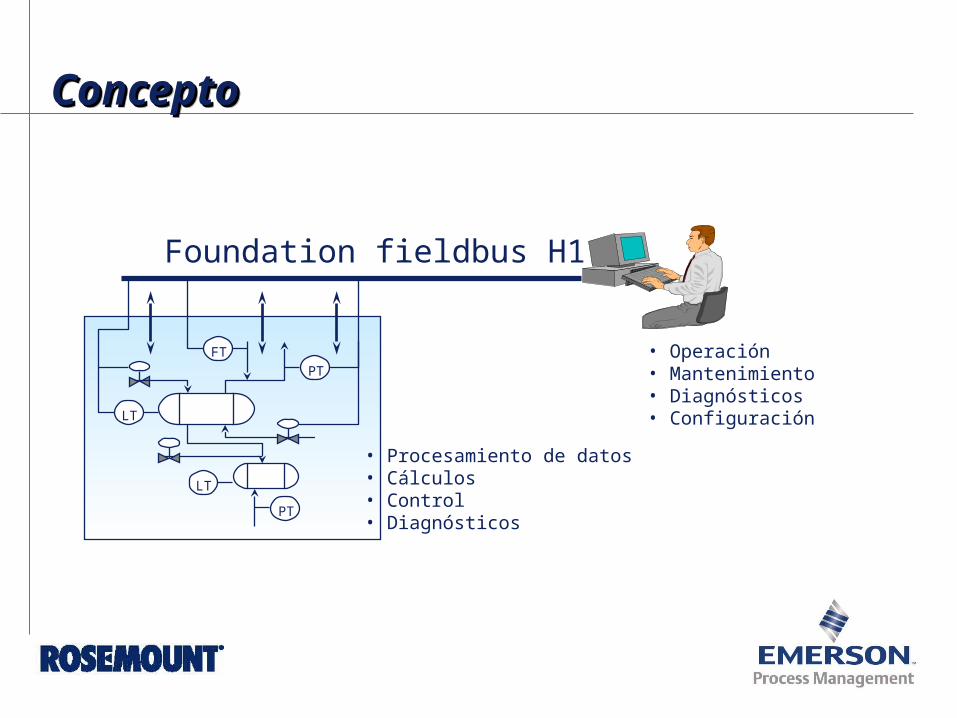
• Procesamiento de datos• Cálculos• Control• Diagnósticos
• Operación• Mantenimiento• Diagnósticos• Configuración
Foundation fieldbus H1
ConceptoConceptoConceptoConcepto
�Plataforma de Automatización ?
FoundationTM fieldbus
FoundationTM fieldbus es una plataforma de automatización y control que utiliza un protocolo de comunicación digital
�Protocolo de comunicación ?
Qué es?Qué es?Qué es?Qué es?
La Fieldbus Foundation es una organización no lucrativa e integrada por los principales fabricantes de instrumentos en el mundo.
Cuenta con laboratorios propios y personal calificado para certificar equipos así como para desarrollar su tecnología.
Cuenta con el apoyo de organizaciones tales como ISA, OSI e ISO
La tecnología FoundationTM fieldbus ha sido LIBERADA y actualmente existen dispositivos y sistemas operando en todo el mundo.
PHYSICAL LAYER
DATA LINK LAYER
FIELDBUS ACCESS SUBLAYER
FIELDBUS MESSAGING SPECIFICATION
USER LAYER
TRANSPORT LAYER
SESSION LAYER
PRESENTATION LAYER
APPLICATION LAYER
USER LAYER
PHYSICAL LAYER
DATA LINK LAYER
NETWORK LAYER
OSI MODEL FIELDBUS
1
2
3
4
5
6
7
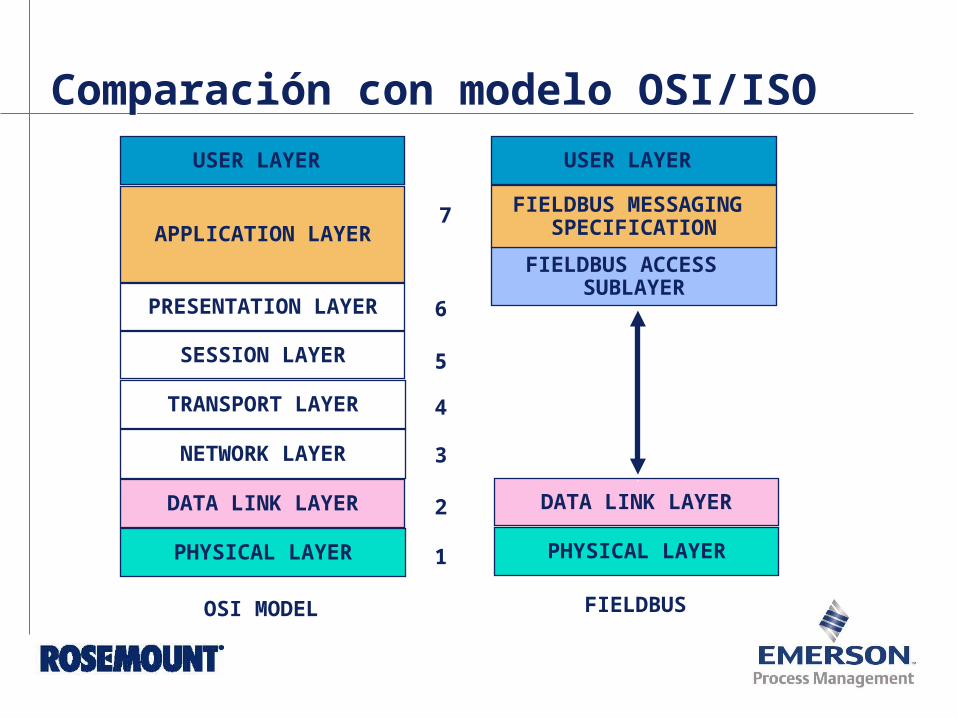
Comparación con modelo OSI/ISOComparación con modelo OSI/ISO
PHYSICAL LAYER
DATA LINK LAYER
FIELDBUS ACCESS SUBLAYER
FIELDBUS MESSAGING SPECIFICATION
USER LAYER USER LAYER
PHYSICAL LAYER
COMMUNICATIONSTACK
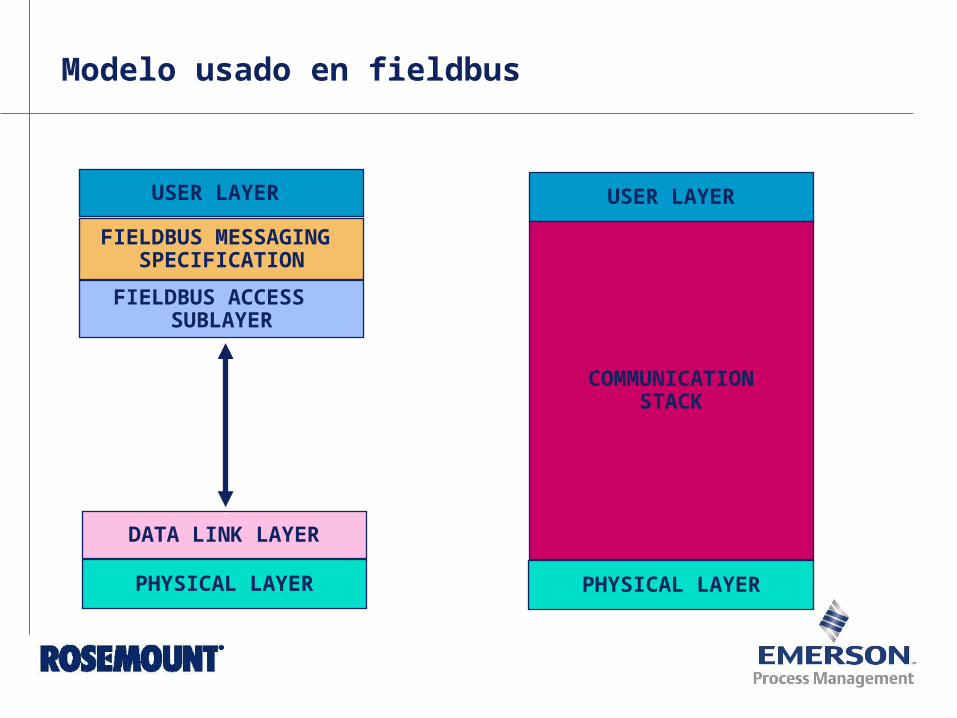
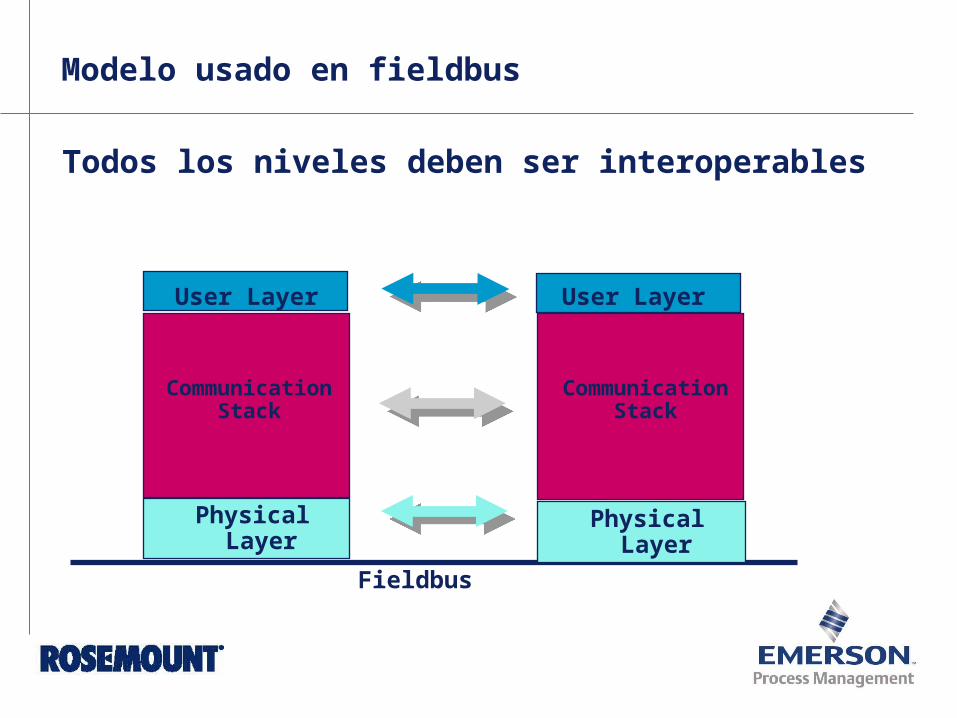
Modelo usado en fieldbus
Fieldbus
User Layer
Physical Layer
CommunicationStack
CommunicationStack
Physical Layer
User Layer
Todos los niveles deben ser interoperables
Modelo usado en fieldbus
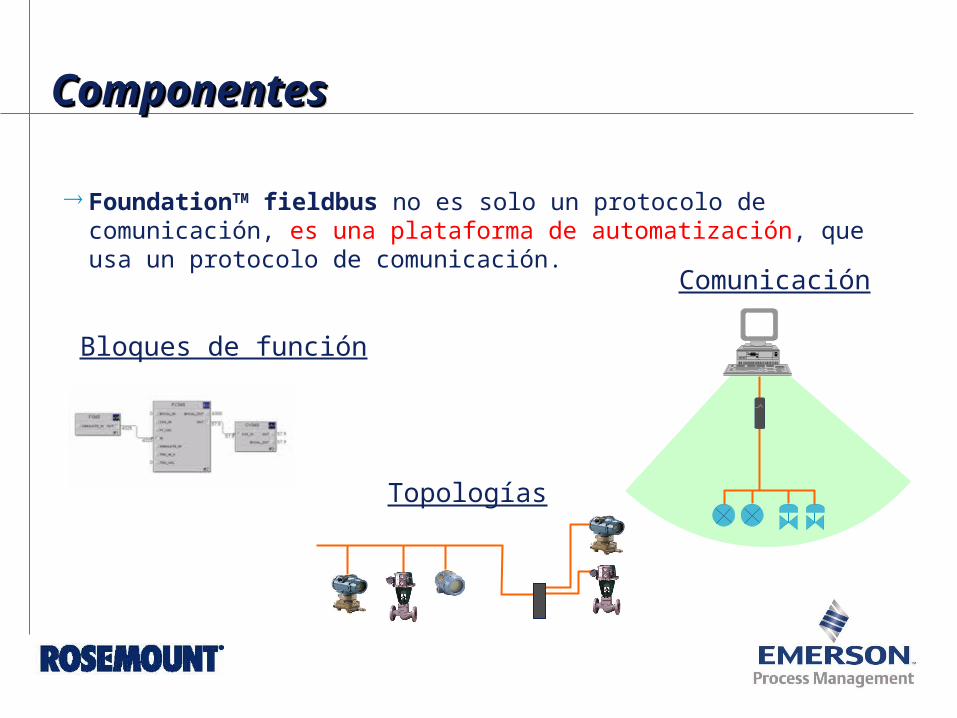
FoundationTM fieldbus no es solo un protocolo de comunicación, es una plataforma de automatización, que usa un protocolo de comunicación.
Bloques de función
Topologías
Comunicación
ComponentesComponentesComponentesComponentes
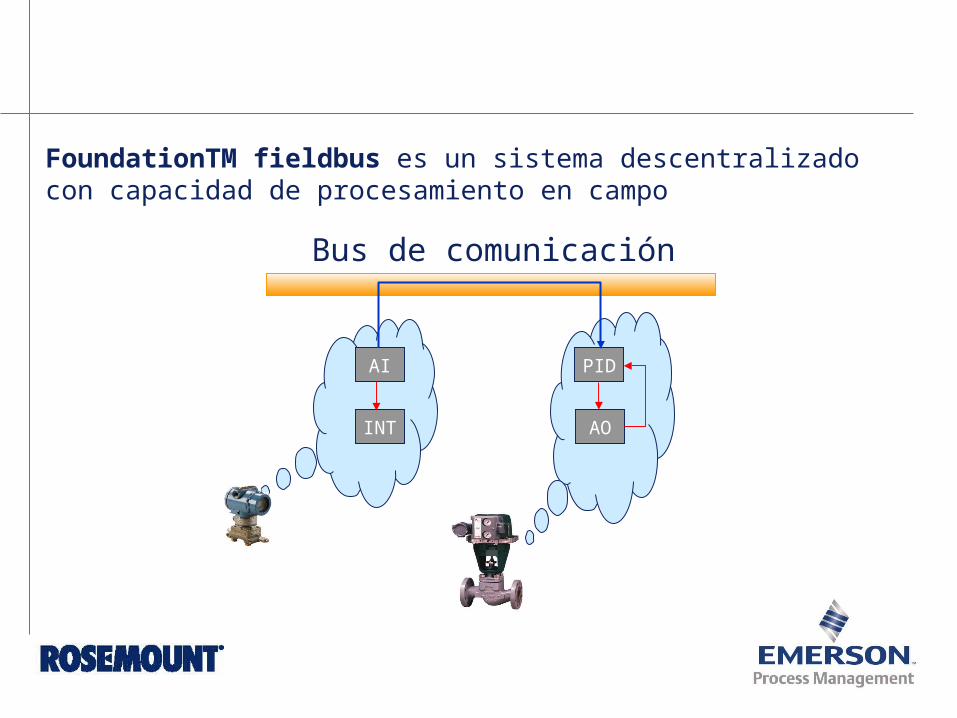
FoundationTM fieldbus es un sistema descentralizado con capacidad de procesamiento en campo
PID
AO
AI
INT
Bus de comunicación
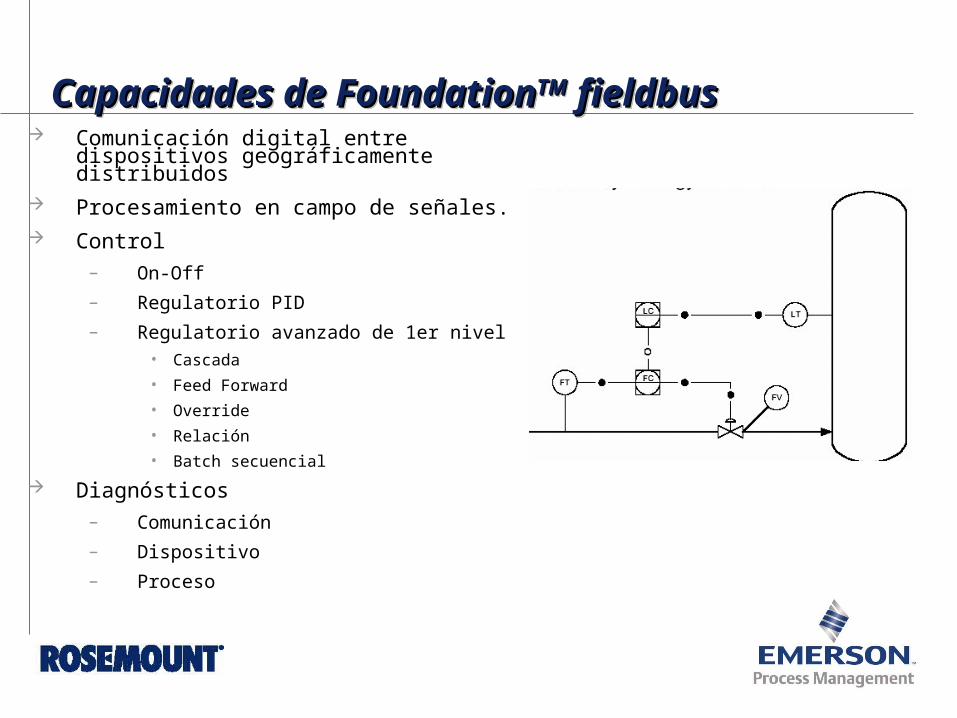
Capacidades de FoundationCapacidades de FoundationTMTM fieldbus fieldbusCapacidades de FoundationCapacidades de FoundationTMTM fieldbus fieldbus Comunicación digital entre dispositivos
geográficamente distribuidos Procesamiento en campo de señales. Control
– On-Off
– Regulatorio PID
– Regulatorio avanzado de 1er nivel• Cascada
• Feed Forward
• Override
• Relación
• Batch secuencial
Diagnósticos– Comunicación
– Dispositivo
– Proceso

FoundationTM fieldbus utiliza como medio físico de transportación un par trenzado que interconecta los dispositivos en campo, suministrando la energía para su funcionamiento y comunicación.
FoundationTM fieldbus permite la interoperabilidad entre diferentes fabricantes en una forma transparente por diseño.
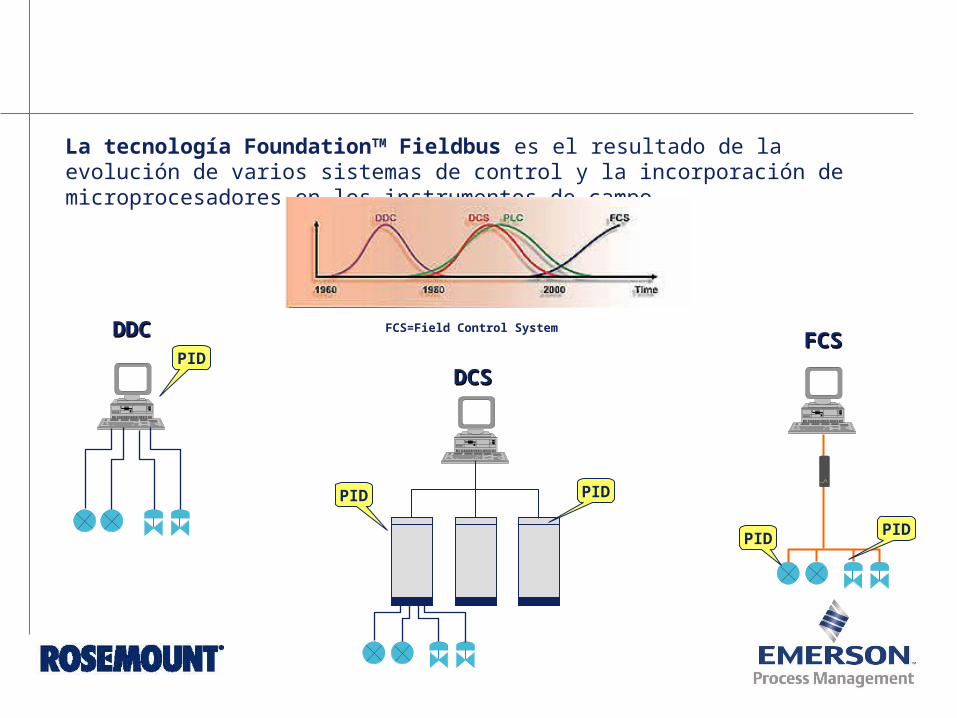
La tecnología FoundationTM Fieldbus es el resultado de la evolución de varios sistemas de control y la incorporación de microprocesadores en los instrumentos de campo.
FCS=Field Control System
PID
DDCDDC
PID
DCSDCS
PID
PID
FCSFCS
PID
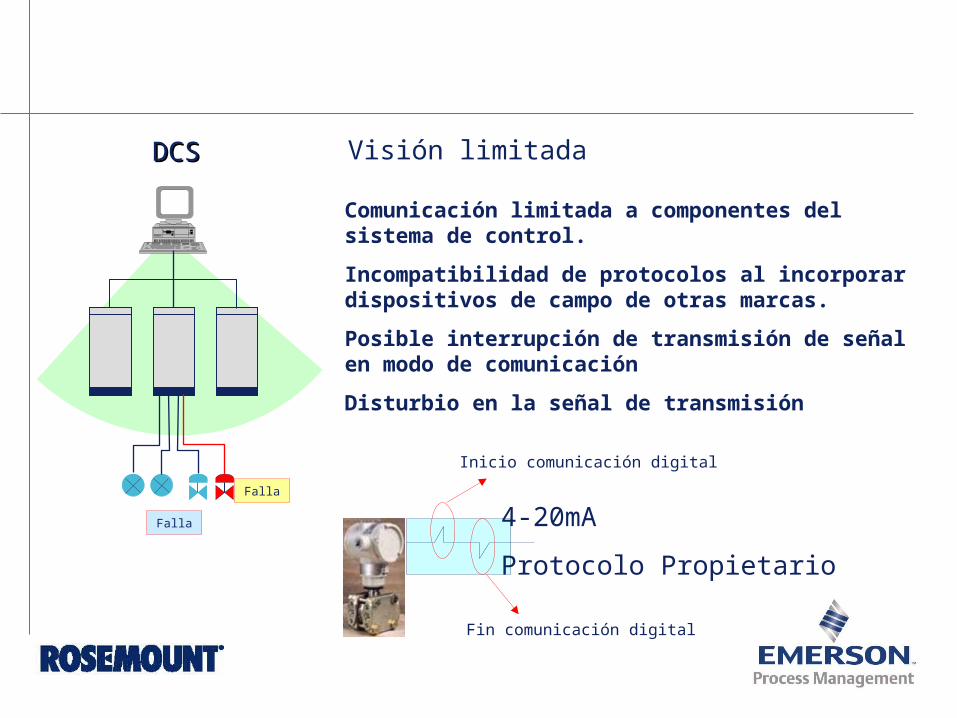
Visión limitada
Comunicación limitada a componentes del sistema de control.
Incompatibilidad de protocolos al incorporar dispositivos de campo de otras marcas.
Posible interrupción de transmisión de señal en modo de comunicación
Disturbio en la señal de transmisión
DCSDCS
Falla
Falla 4-20mA
Protocolo Propietario
Inicio comunicación digital
Fin comunicación digital
4-20mA
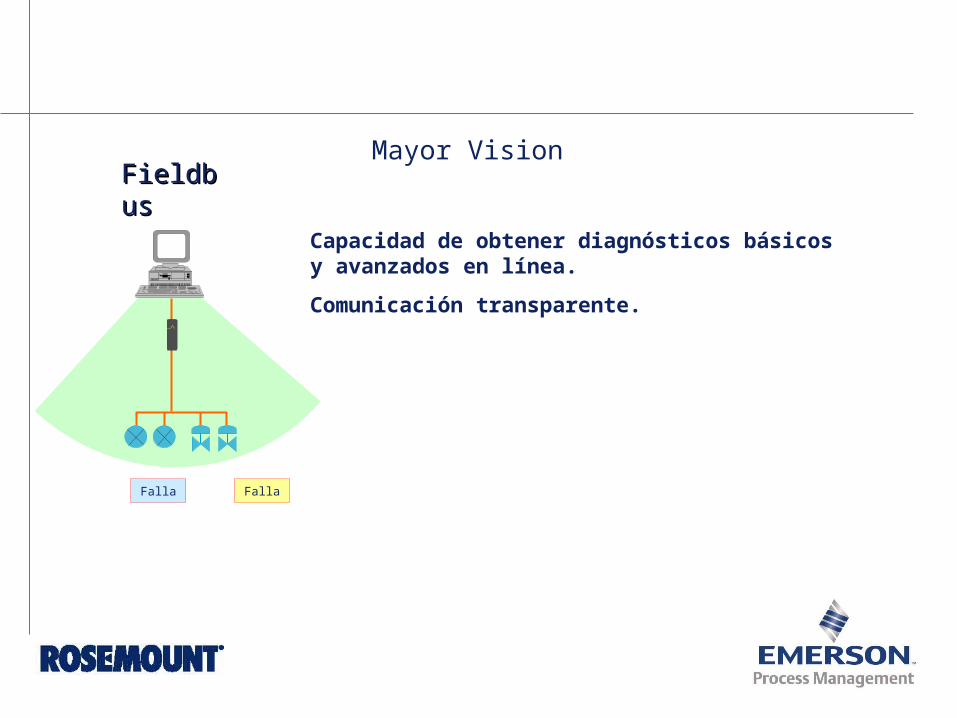
Mayor Vision
Capacidad de obtener diagnósticos básicos y avanzados en línea.
Comunicación transparente.
FieldbusFieldbus
FallaFalla
Dispositivo de EnlaceLinking Device
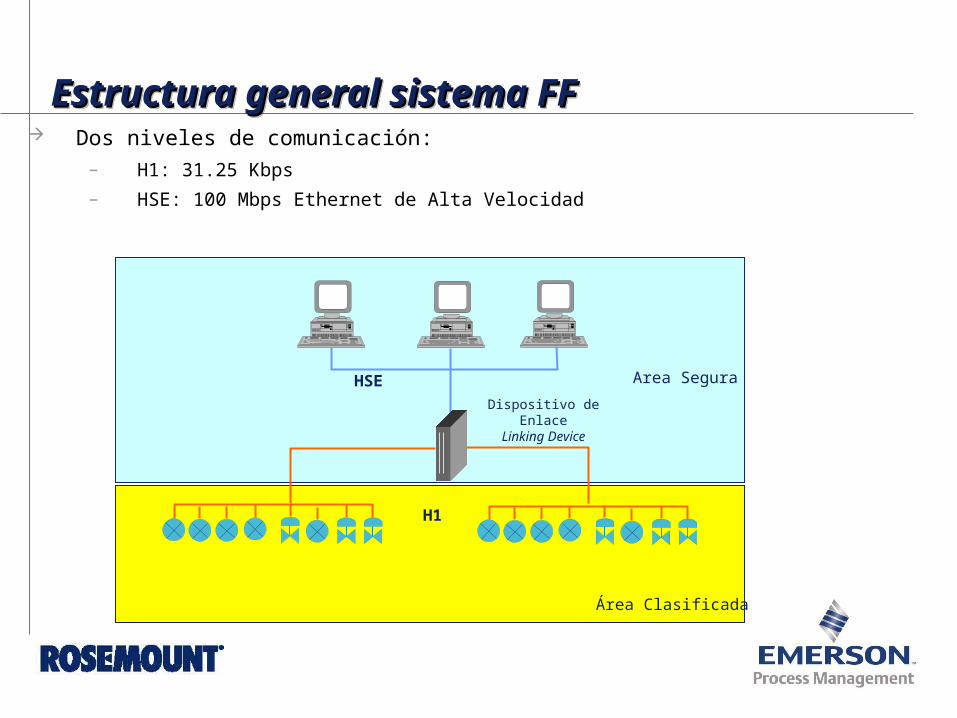
Estructura general sistema FFEstructura general sistema FFEstructura general sistema FFEstructura general sistema FF Dos niveles de comunicación:
– H1: 31.25 Kbps
– HSE: 100 Mbps Ethernet de Alta Velocidad
H1
HSE Area Segura
Área Clasificada
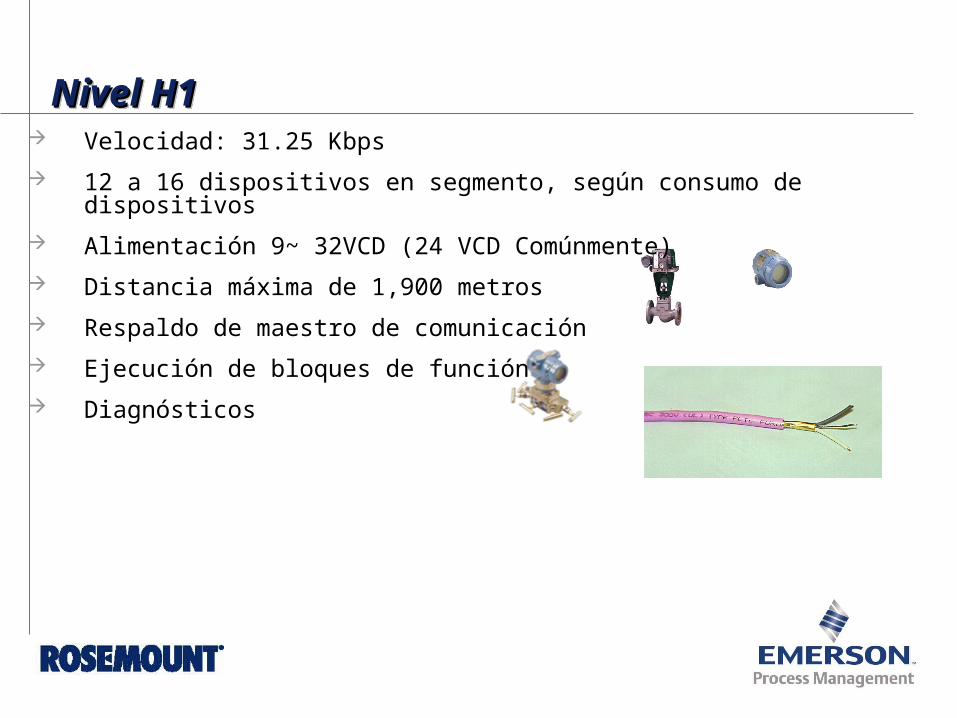
Nivel H1Nivel H1Nivel H1Nivel H1 Velocidad: 31.25 Kbps
12 a 16 dispositivos en segmento, según consumo de dispositivos
Alimentación 9~ 32VCD (24 VCD Comúnmente)
Distancia máxima de 1,900 metros
Respaldo de maestro de comunicación
Ejecución de bloques de función
Diagnósticos
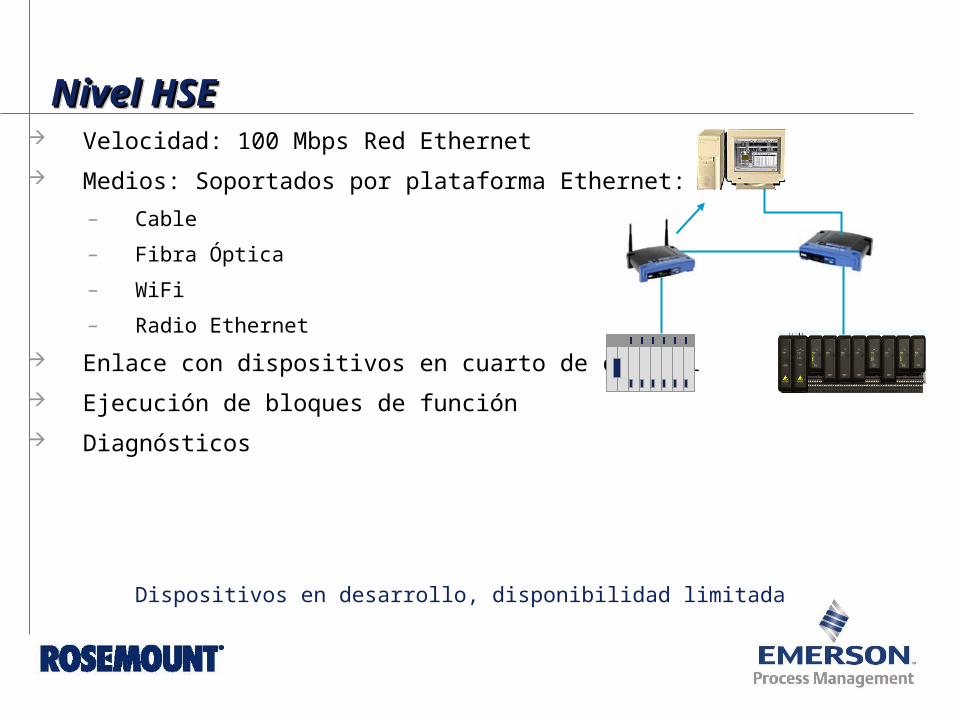
Nivel HSENivel HSENivel HSENivel HSE Velocidad: 100 Mbps Red Ethernet
Medios: Soportados por plataforma Ethernet:
– Cable
– Fibra Óptica
– WiFi
– Radio Ethernet
Enlace con dispositivos en cuarto de control
Ejecución de bloques de función
Diagnósticos
Dispositivos en desarrollo, disponibilidad limitada
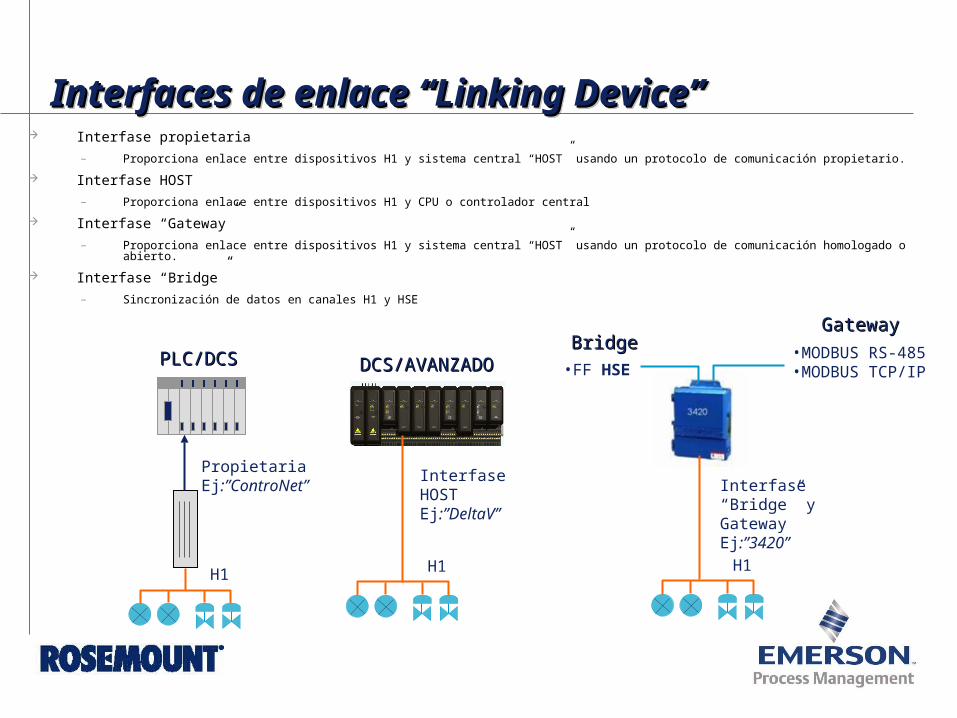
Interfaces de enlace “Linking Device”Interfaces de enlace “Linking Device”Interfaces de enlace “Linking Device”Interfaces de enlace “Linking Device” Interfase propietaria
– Proporciona enlace entre dispositivos H1 y sistema central “HOST” usando un protocolo de comunicación propietario.
Interfase HOST
– Proporciona enlace entre dispositivos H1 y CPU o controlador central
Interfase “Gateway”
– Proporciona enlace entre dispositivos H1 y sistema central “HOST” usando un protocolo de comunicación homologado o abierto.
Interfase “Bridge”
– Sincronización de datos en canales H1 y HSE
H1
PropietariaEj:”ControNet”
PLC/DCSPLC/DCS
H1
DCS/AVANZADODCS/AVANZADO
Interfase HOSTEj:”DeltaV”
H1
Interfase “Bridge” y GatewayEj:”3420”
•MODBUS RS-485•MODBUS TCP/IP•FF HSE
BridgeBridgeGatewayGateway
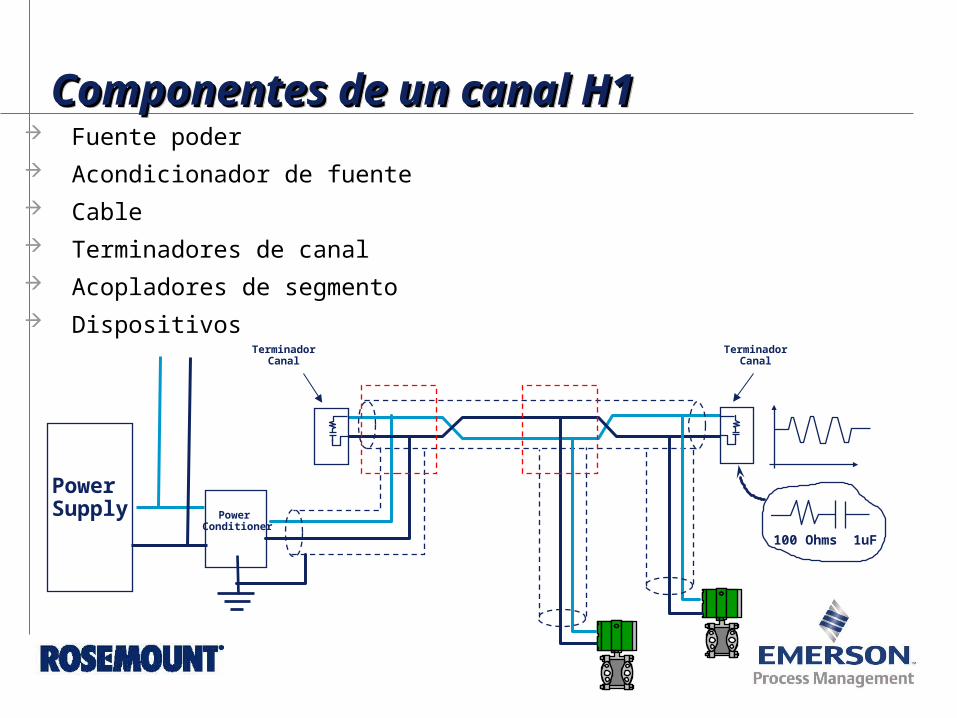
Componentes de un canal H1Componentes de un canal H1Componentes de un canal H1Componentes de un canal H1 Fuente poder Acondicionador de fuente Cable Terminadores de canal Acopladores de segmento Dispositivos
Power Supply
100 Ohms 1uF
Power Conditioner
TerminadorCanal
TerminadorCanal
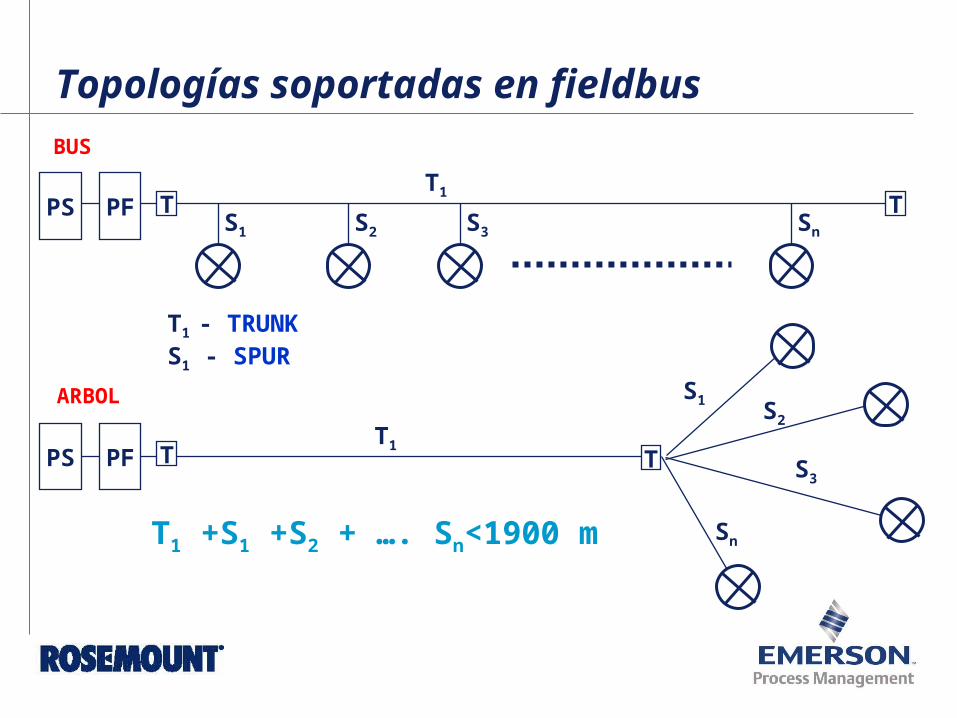
Topologías soportadas en fieldbus
TPFPS T
S1S2
S3
Sn
T1
T TT1
S1 S2 S3 Sn
PFPS
T1 - TRUNKS1 - SPUR
T1 +S1 +S2 + …. Sn<1900 m
BUS
ARBOL
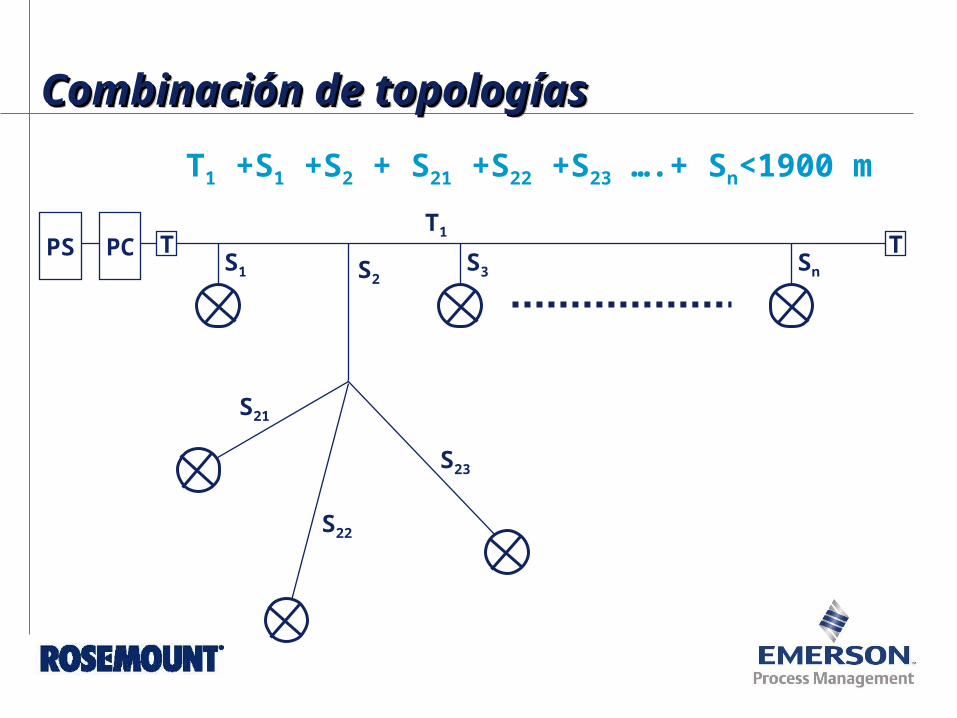
Combinación de topologíasCombinación de topologíasCombinación de topologíasCombinación de topologías
T TT1
S1 S3 Sn
PCPS
S23
S22
S2
S21
T1 +S1 +S2 + S21 +S22 +S23 ….+ Sn<1900 m
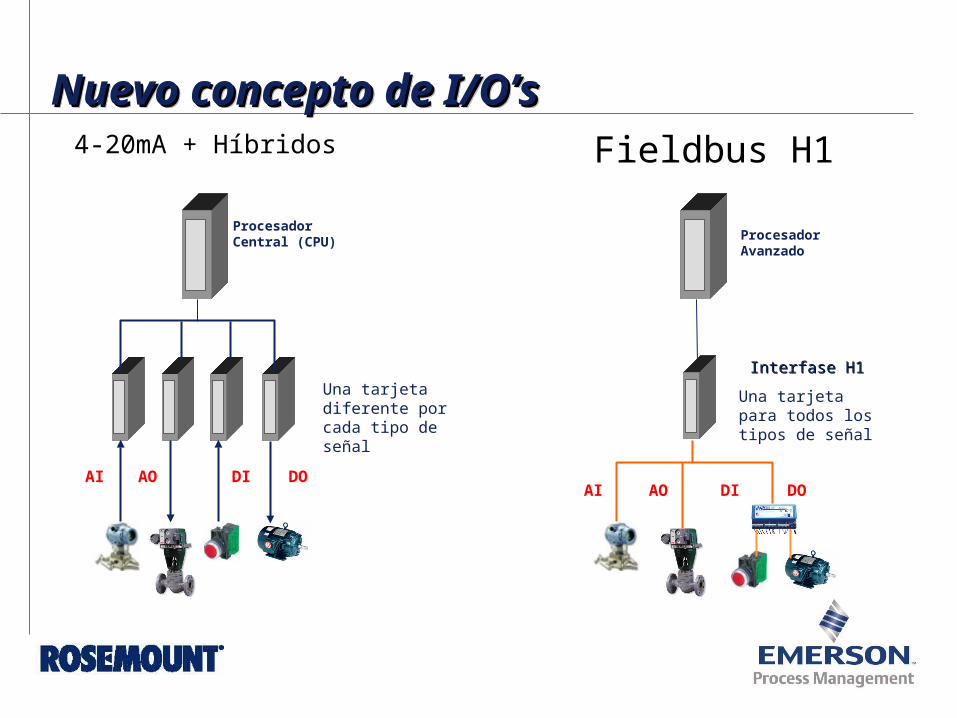
Nuevo concepto de I/O’sNuevo concepto de I/O’sNuevo concepto de I/O’sNuevo concepto de I/O’s4-20mA + Híbridos Fieldbus H1
ProcesadorCentral (CPU)
DODIAOAI
Una tarjeta diferente por cada tipo de señal
DODIAOAI
Interfase H1Interfase H1
Una tarjeta para todos los tipos de señal
ProcesadorAvanzado
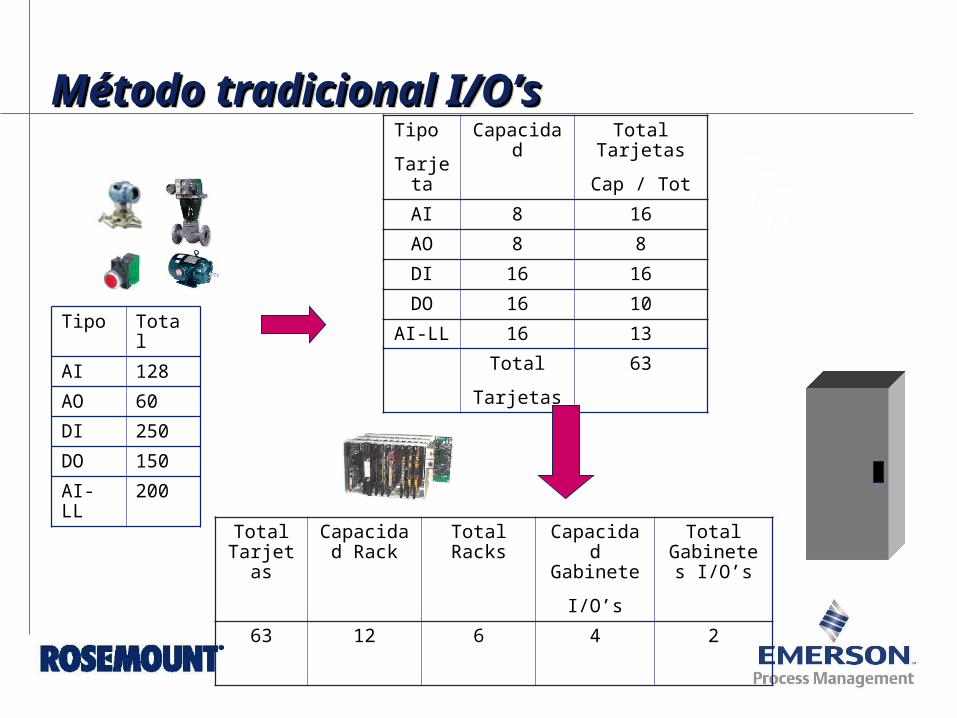
Método tradicional I/O’sMétodo tradicional I/O’sMétodo tradicional I/O’sMétodo tradicional I/O’s
Tipo Total
AI 128
AO 60
DI 250
DO 150
AI-LL 200
Tipo
Tarjeta
Capacidad Total Tarjetas
Cap / Tot
AI 8 16
AO 8 8
DI 16 16
DO 16 10
AI-LL 16 13
Total
Tarjetas
63
Total Tarjetas
Capacidad Rack
Total Racks
Capacidad Gabinete
I/O’s
Total Gabinetes
I/O’s
63 12 6 4 2
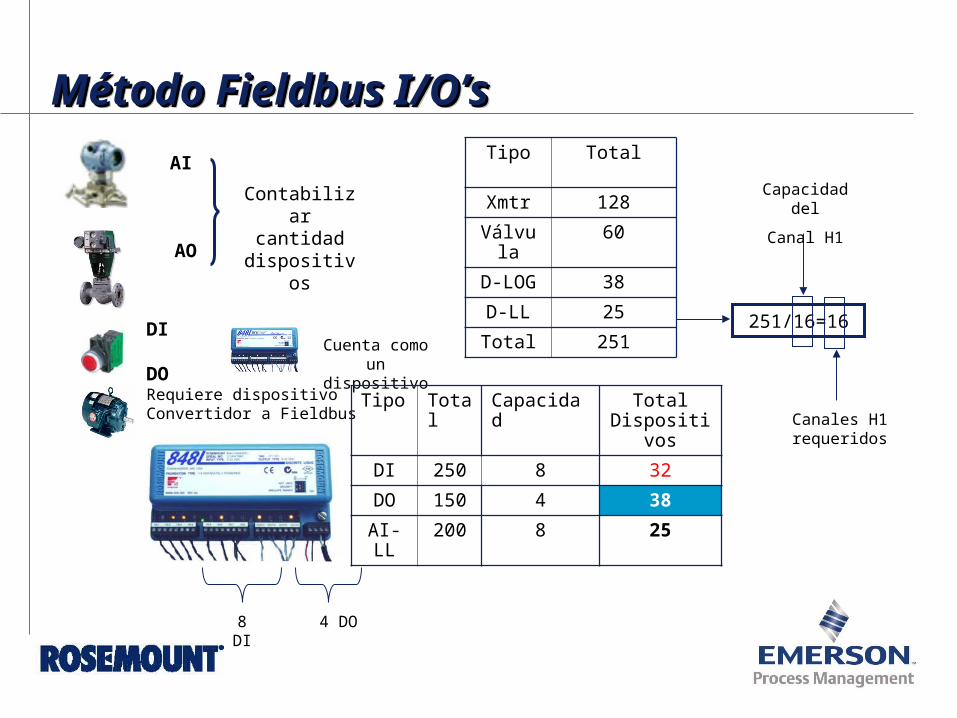
Método Fieldbus I/O’sMétodo Fieldbus I/O’sMétodo Fieldbus I/O’sMétodo Fieldbus I/O’sTipo Total
Xmtr 128
Válvula 60
D-LOG 38
D-LL 25
Total 251
AI
AO
DI
DORequiere dispositivoConvertidor a Fieldbus
Cuenta como un dispositivo
8 DI 4 DO
Tipo Total Capacidad Total Dispositivos
DI 250 8 32
DO 150 4 38
AI-LL 200 8 25
Contabilizar cantidad
dispositivos
251/16=16
Capacidad del
Canal H1
Canales H1 requeridos
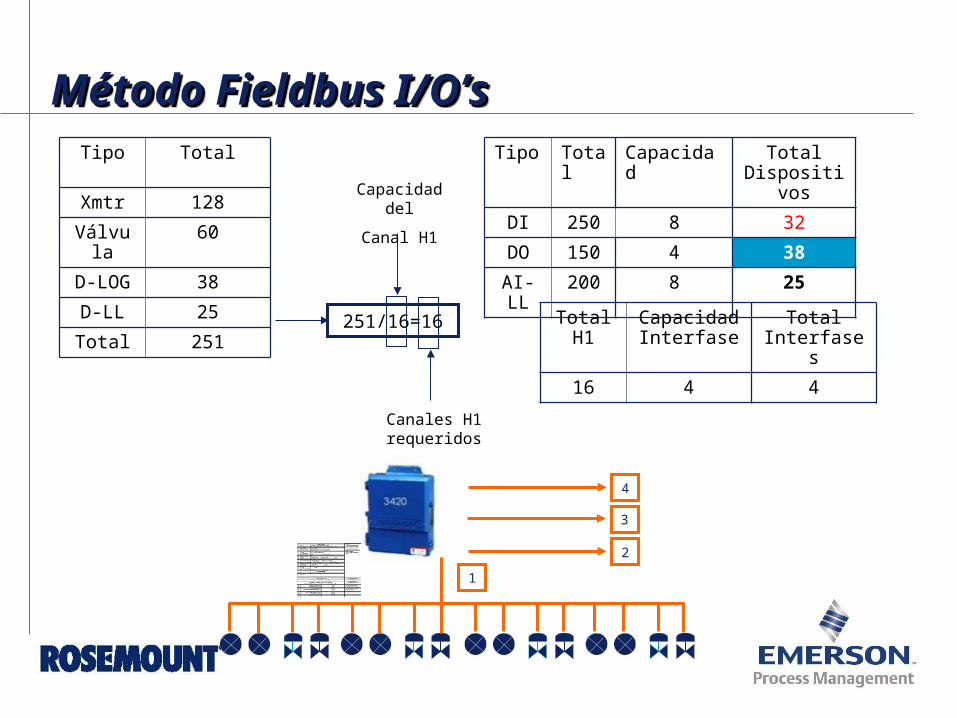
Método Fieldbus I/O’sMétodo Fieldbus I/O’sMétodo Fieldbus I/O’sMétodo Fieldbus I/O’sTipo Total Capacidad Total
Dispositivos
DI 250 8 32
DO 150 4 38
AI-LL 200 8 25
Tipo Total
Xmtr 128
Válvula 60
D-LOG 38
D-LL 25
Total 251 251/16=16
Capacidad del
Canal H1
Canales H1 requeridos
Total H1
Capacidad Interfase
Total Interfases
16 4 4
1
2
3
4
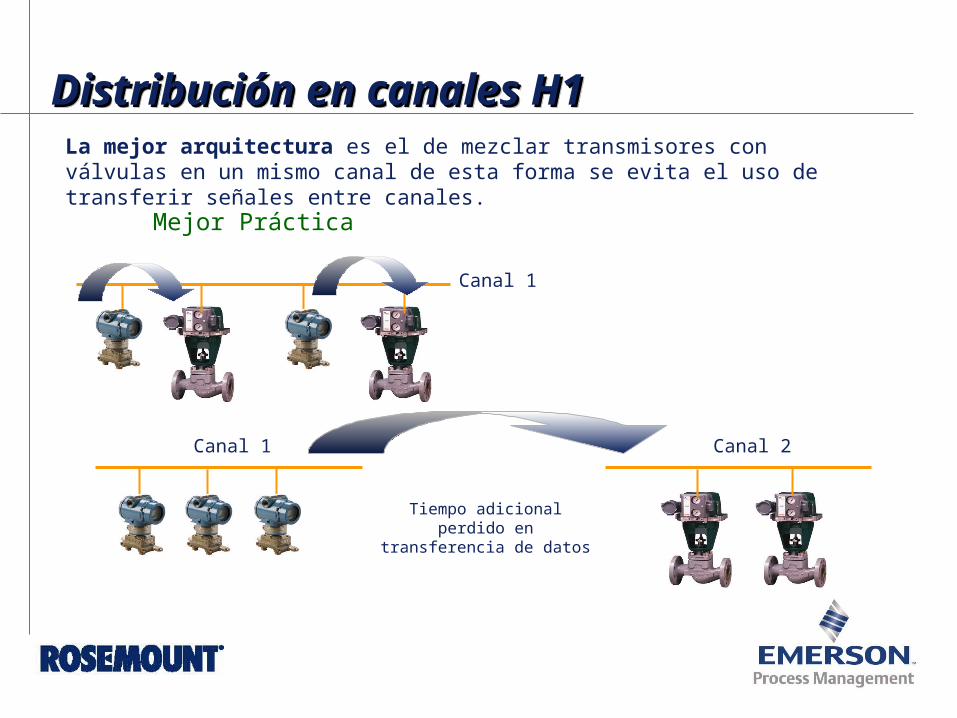
La mejor arquitectura es el de mezclar transmisores con válvulas en un mismo canal de esta forma se evita el uso de transferir señales entre canales.
Canal 1 Canal 2
Canal 1
Distribución en canales H1Distribución en canales H1Distribución en canales H1Distribución en canales H1
Mejor Práctica
Tiempo adicional perdido en transferencia de datos
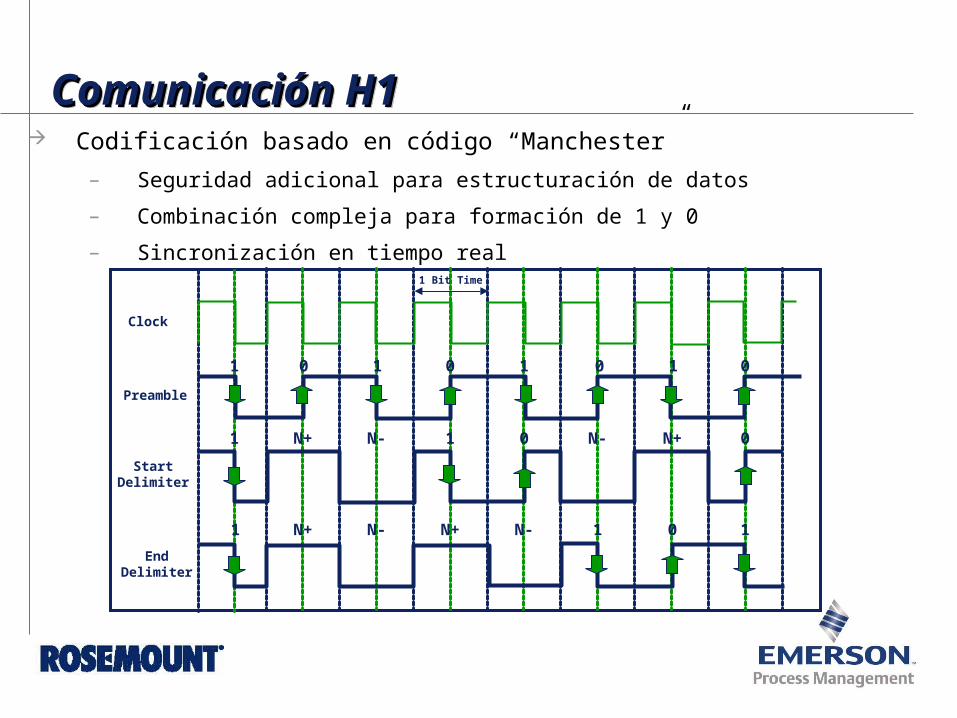
Comunicación H1Comunicación H1Comunicación H1Comunicación H1 Codificación basado en código “Manchester”
– Seguridad adicional para estructuración de datos
– Combinación compleja para formación de 1 y 0
– Sincronización en tiempo real1 Bit Time
1
1
111
1
1 11
00
0000
0N+N+
N+N+
N-N-
N-N-
Clock
StartDelimiter
EndDelimiter
Preamble
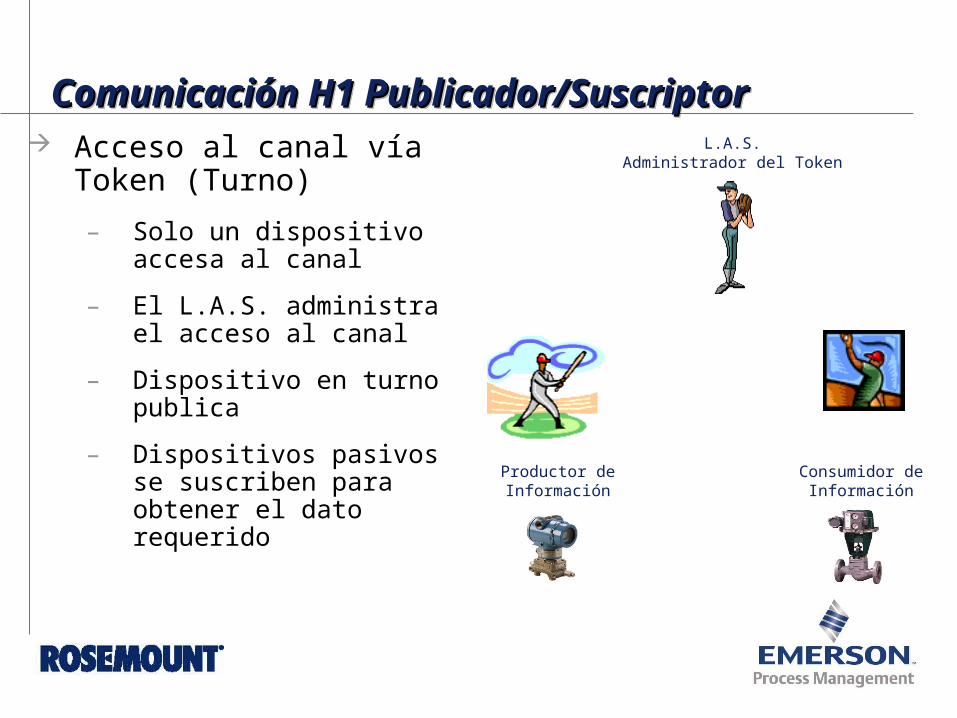
Comunicación H1 Publicador/SuscriptorComunicación H1 Publicador/SuscriptorComunicación H1 Publicador/SuscriptorComunicación H1 Publicador/Suscriptor Acceso al canal vía Token
(Turno)
– Solo un dispositivo accesa al canal
– El L.A.S. administra el acceso al canal
– Dispositivo en turno publica
– Dispositivos pasivos se suscriben para obtener el dato requerido
L.A.S.Administrador del Token
Consumidor deInformación
Productor deInformación
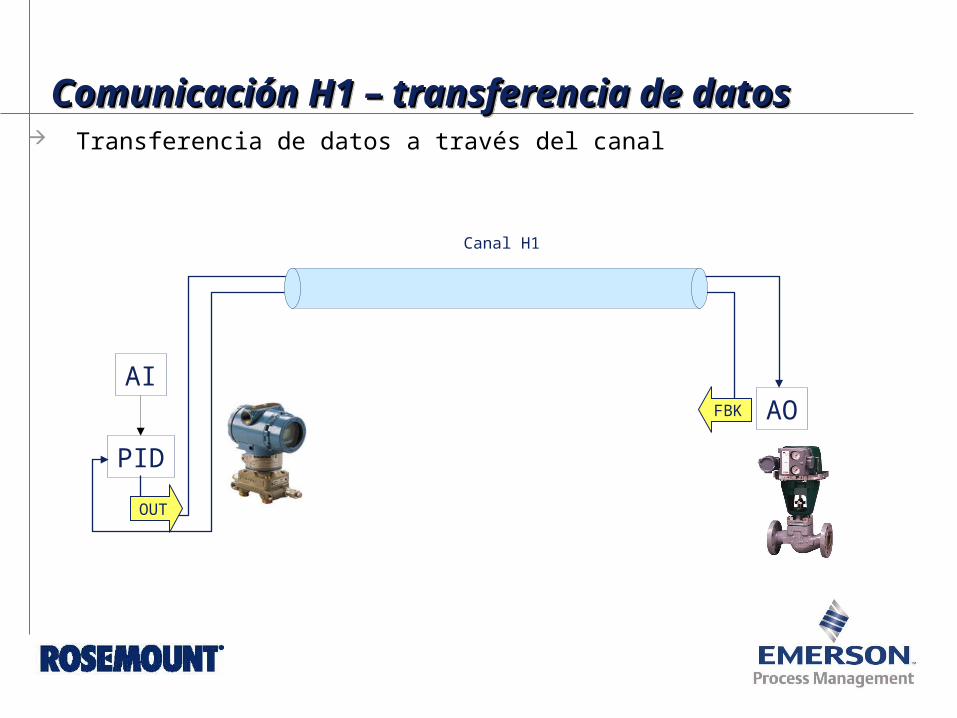
Comunicación H1 – transferencia de datosComunicación H1 – transferencia de datosComunicación H1 – transferencia de datosComunicación H1 – transferencia de datos Transferencia de datos a través del canal
AI
PID
AO
Canal H1
OUT
FBK
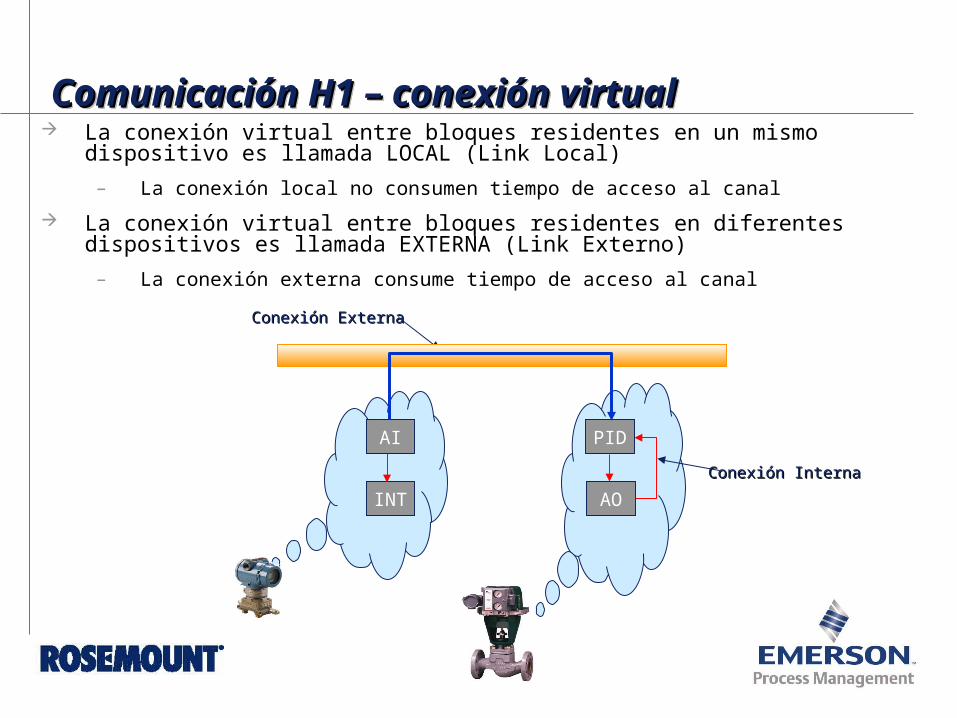
Conexión InternaConexión Interna
Conexión ExternaConexión Externa
PID
AO
AI
INT
Comunicación H1 – conexión virtualComunicación H1 – conexión virtualComunicación H1 – conexión virtualComunicación H1 – conexión virtual La conexión virtual entre bloques residentes en un mismo dispositivo es llamada
LOCAL (Link Local)
– La conexión local no consumen tiempo de acceso al canal
La conexión virtual entre bloques residentes en diferentes dispositivos es llamada EXTERNA (Link Externo)
– La conexión externa consume tiempo de acceso al canal
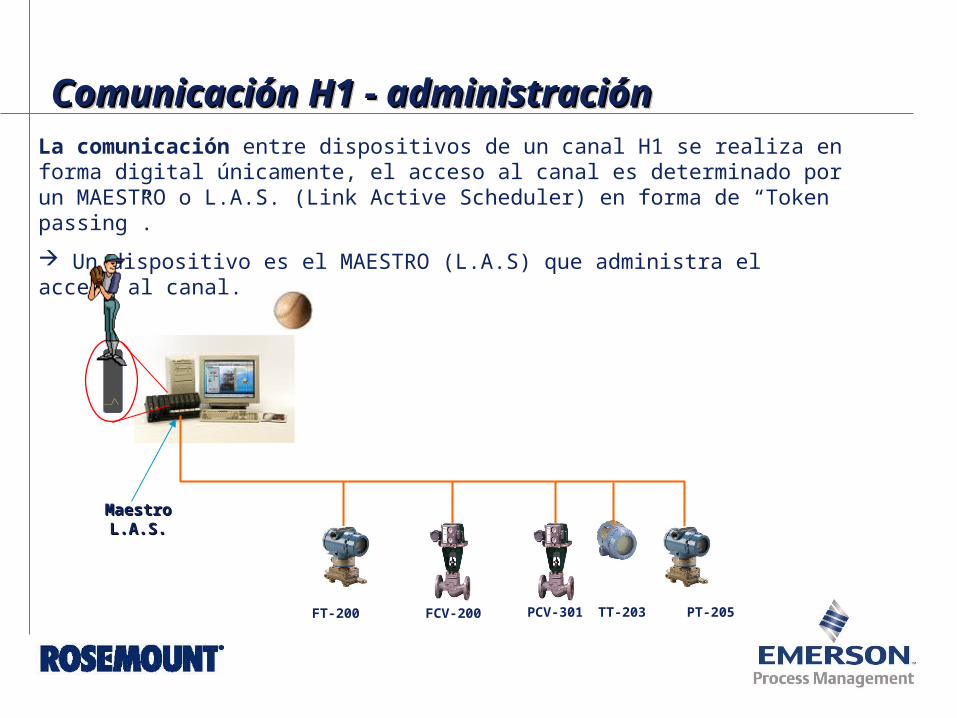
La comunicación entre dispositivos de un canal H1 se realiza en forma digital únicamente, el acceso al canal es determinado por un MAESTRO o L.A.S. (Link Active Scheduler) en forma de “Token passing”.
Un dispositivo es el MAESTRO (L.A.S) que administra el acceso al canal.
MaestroMaestroL.A.S.L.A.S.
FT-200 FCV-200 PCV-301 TT-203 PT-205
Comunicación H1 - administración Comunicación H1 - administración Comunicación H1 - administración Comunicación H1 - administración
MaestroMaestroL.A.S.L.A.S.
FT-200 FCV-200 PCV-301 TT-203 PT-205
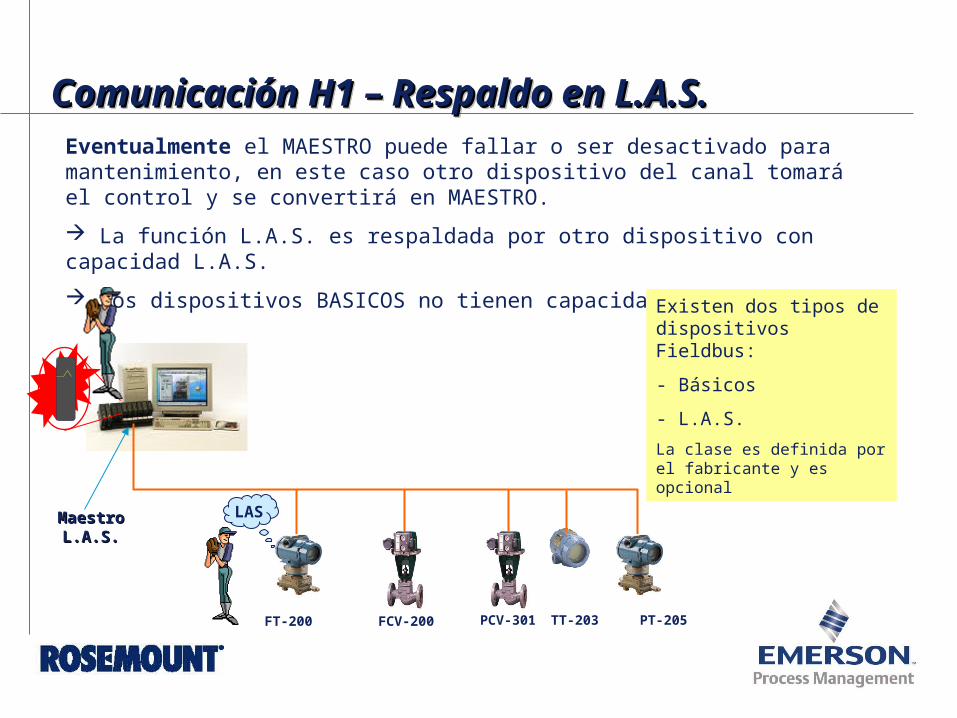
Eventualmente el MAESTRO puede fallar o ser desactivado para mantenimiento, en este caso otro dispositivo del canal tomará el control y se convertirá en MAESTRO.
La función L.A.S. es respaldada por otro dispositivo con capacidad L.A.S.
Los dispositivos BASICOS no tienen capacidad L.A.S.
LAS
Existen dos tipos de dispositivos Fieldbus:
- Básicos
- L.A.S.
La clase es definida por el fabricante y es opcional
Comunicación H1 – Respaldo en L.A.S. Comunicación H1 – Respaldo en L.A.S. Comunicación H1 – Respaldo en L.A.S. Comunicación H1 – Respaldo en L.A.S.
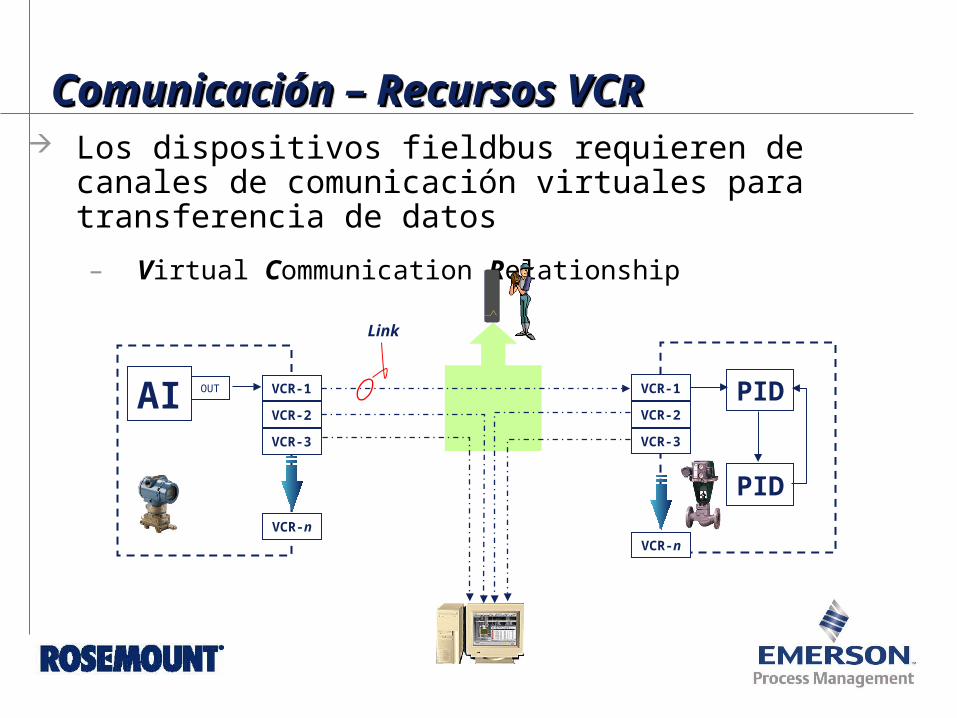
Comunicación – Recursos VCRComunicación – Recursos VCRComunicación – Recursos VCRComunicación – Recursos VCR Los dispositivos fieldbus requieren de canales de
comunicación virtuales para transferencia de datos
– Virtual Communication Relationship
VCR-1
VCR-2
VCR-3
VCR-n
VCR-1
VCR-2
VCR-3
VCR-n
AI OUT PID
PID
Link
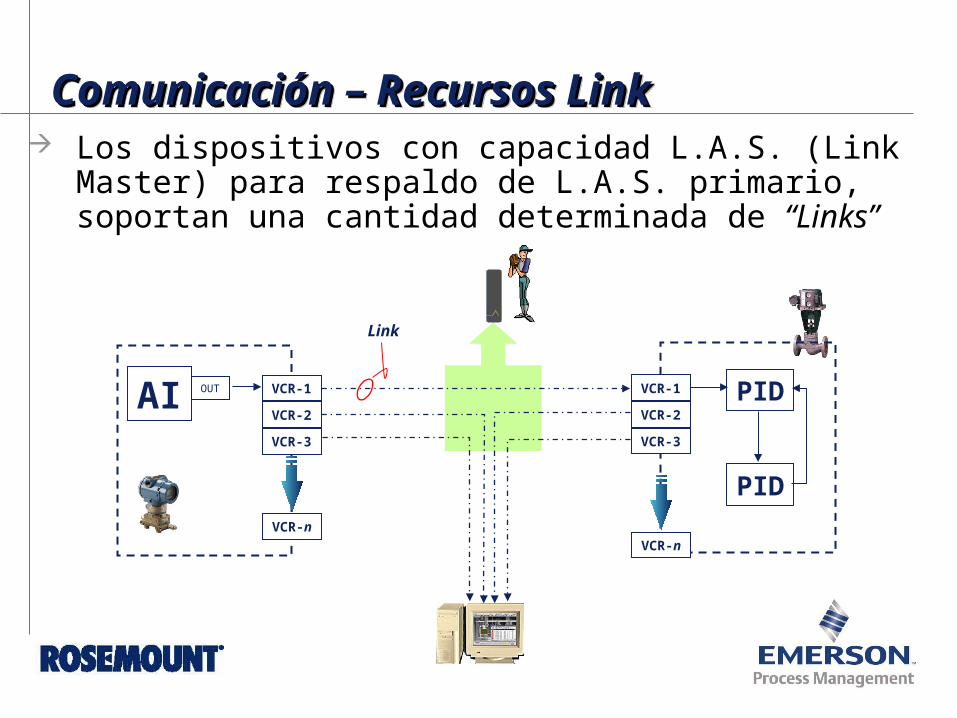
Comunicación – Recursos LinkComunicación – Recursos LinkComunicación – Recursos LinkComunicación – Recursos Link Los dispositivos con capacidad L.A.S. (Link Master) para
respaldo de L.A.S. primario, soportan una cantidad determinada de “Links”
VCR-1
VCR-2
VCR-3
VCR-n
VCR-1
VCR-2
VCR-3
VCR-n
AI OUT PID
PID
Link
Procesamiento de datos - Bloques de función Procesamiento de datos - Bloques de función Procesamiento de datos - Bloques de función Procesamiento de datos - Bloques de función
FI345
IN OUT
# 1
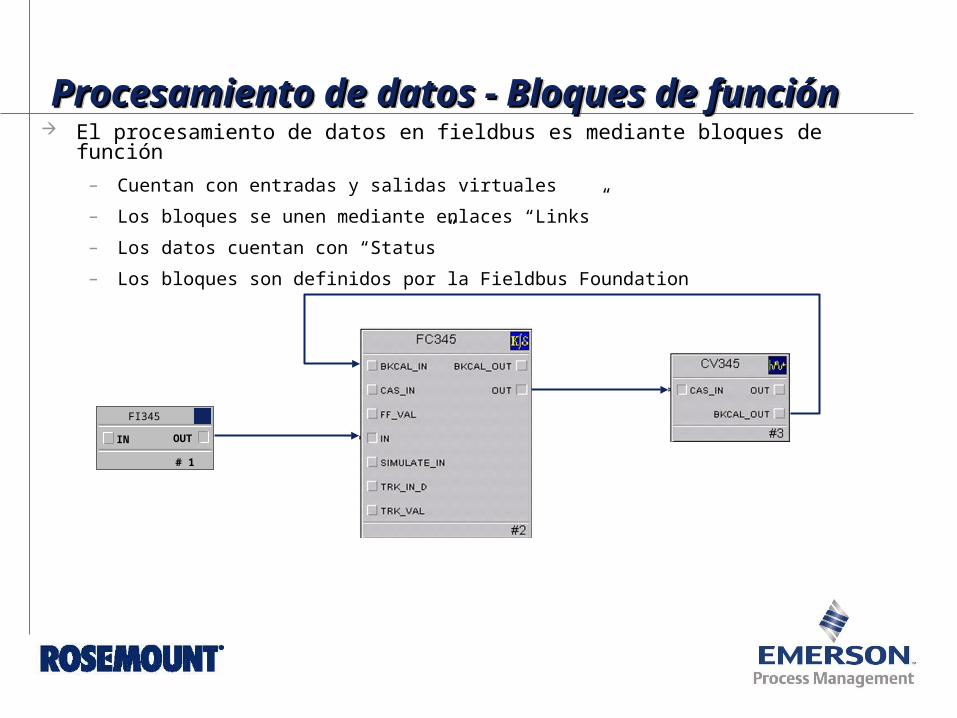
El procesamiento de datos en fieldbus es mediante bloques de función
– Cuentan con entradas y salidas virtuales
– Los bloques se unen mediante enlaces “Links”
– Los datos cuentan con “Status”
– Los bloques son definidos por la Fieldbus Foundation
Procesamiento de datos - Status Procesamiento de datos - Status Procesamiento de datos - Status Procesamiento de datos - Status
FI345
IN OUT
# 1
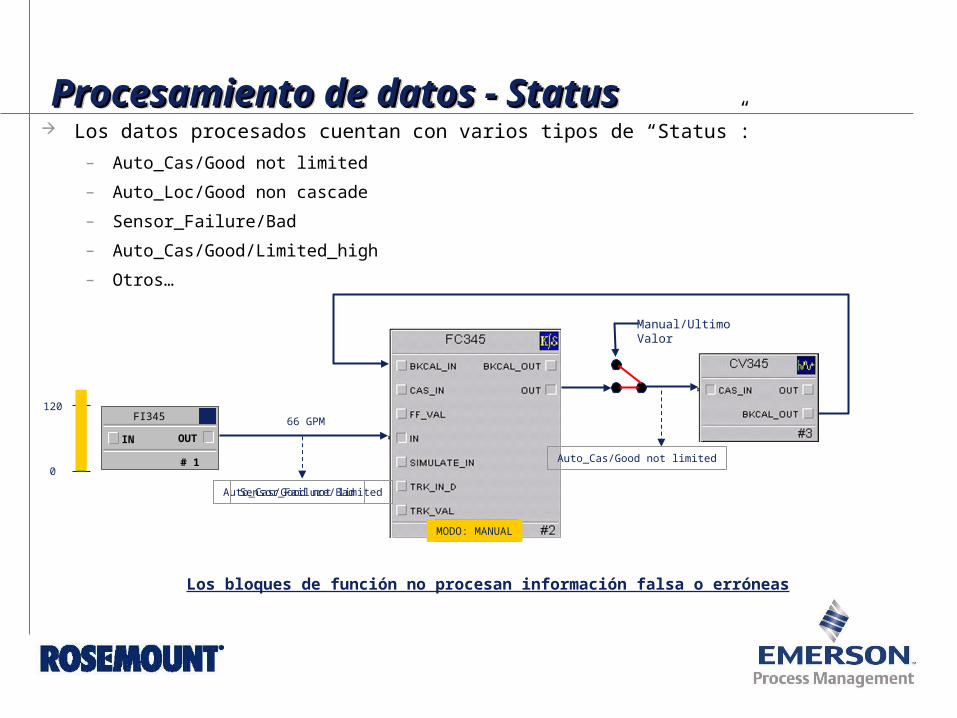
Los datos procesados cuentan con varios tipos de “Status”:
– Auto_Cas/Good not limited
– Auto_Loc/Good non cascade
– Sensor_Failure/Bad
– Auto_Cas/Good/Limited_high
– Otros…
Auto_Cas/Good not limited
66 GPM
Auto_Cas/Good not limited
MODO: AUTO
0
120
Sensor_Failure/Bad
MODO: MANUAL
Los bloques de función no procesan información falsa o erróneas
Manual/UltimoValor
Procesamiento de datos - Status Procesamiento de datos - Status Procesamiento de datos - Status Procesamiento de datos - Status
FI345
IN OUT
# 1
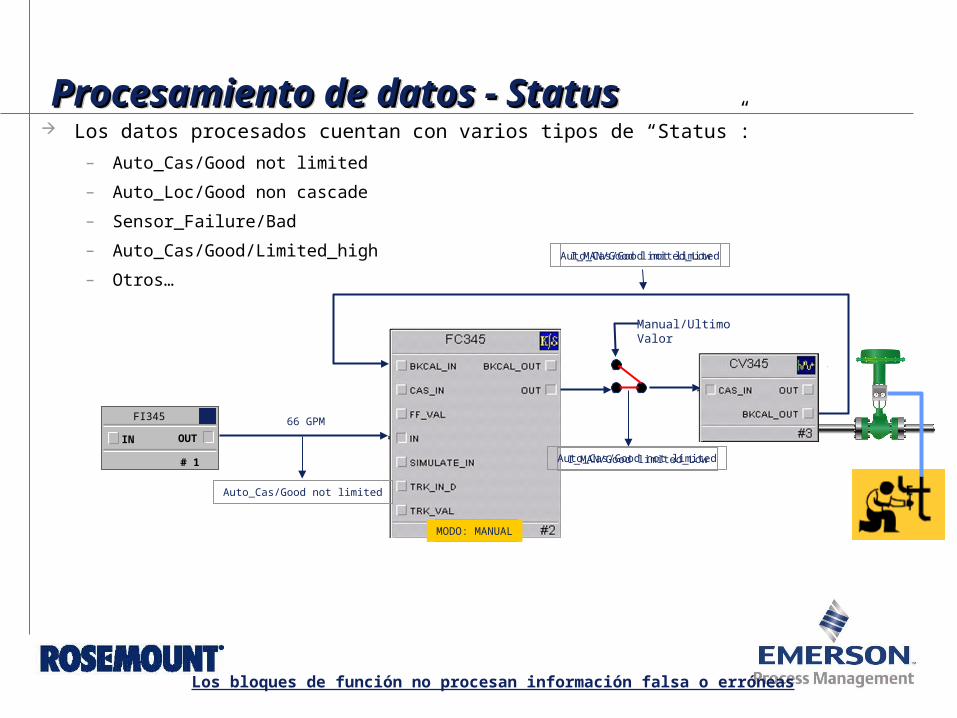
Los datos procesados cuentan con varios tipos de “Status”:
– Auto_Cas/Good not limited
– Auto_Loc/Good non cascade
– Sensor_Failure/Bad
– Auto_Cas/Good/Limited_high
– Otros…
Auto_Cas/Good not limited
66 GPM
MODO: AUTOMODO: MANUAL
Los bloques de función no procesan información falsa o erróneas
I_MAN/Good limited_Low
I_MAN/Good limited_LowAuto_Cas/Good not limited
Auto_Cas/Good not limited
Manual/UltimoValor
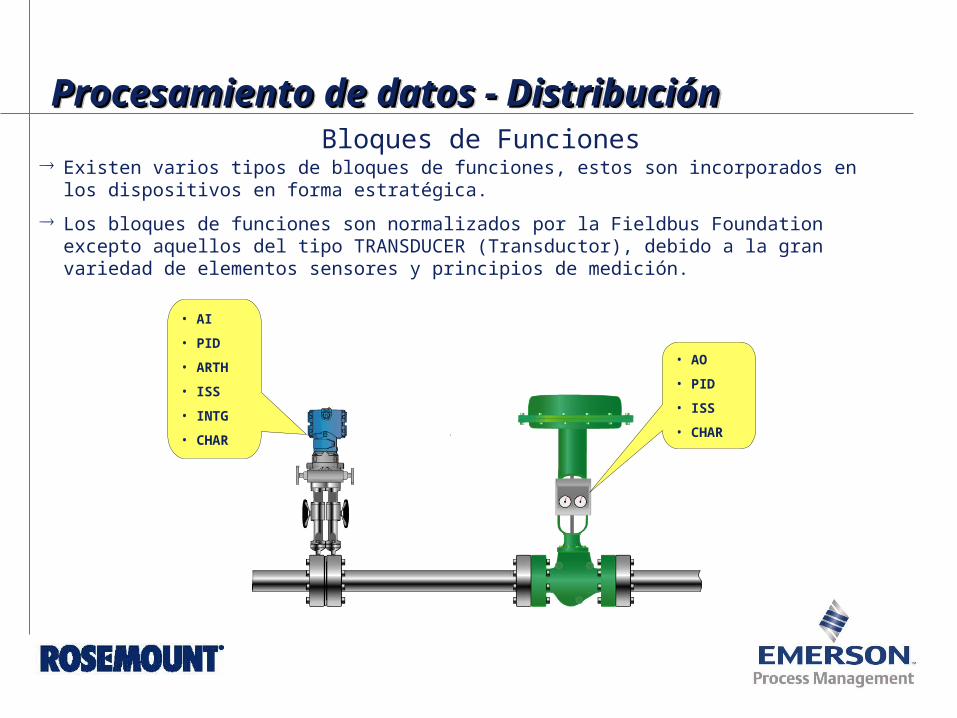
Bloques de Funciones Existen varios tipos de bloques de funciones, estos son incorporados en los dispositivos en forma
estratégica.
Los bloques de funciones son normalizados por la Fieldbus Foundation excepto aquellos del tipo TRANSDUCER (Transductor), debido a la gran variedad de elementos sensores y principios de medición.
• AI
• PID
• ARTH
• ISS
• INTG
• CHAR
• AO
• PID
• ISS
• CHAR
Procesamiento de datos - DistribuciónProcesamiento de datos - DistribuciónProcesamiento de datos - DistribuciónProcesamiento de datos - Distribución
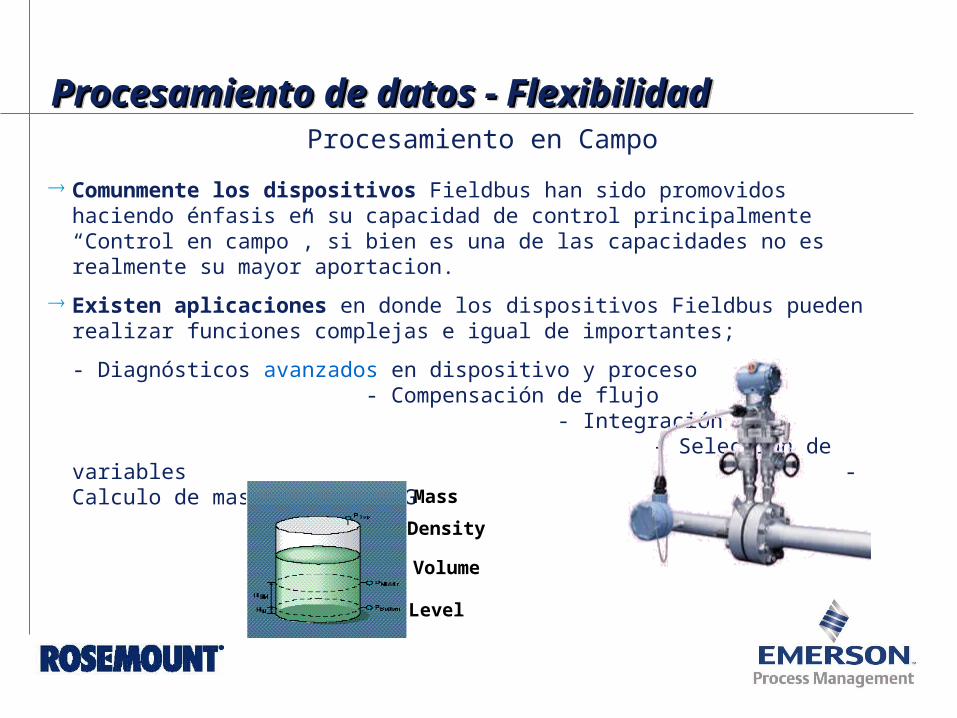
Procesamiento en Campo
Comunmente los dispositivos Fieldbus han sido promovidos haciendo énfasis en su capacidad de control principalmente “Control en campo”, si bien es una de las capacidades no es realmente su mayor aportacion.
Existen aplicaciones en donde los dispositivos Fieldbus pueden realizar funciones complejas e igual de importantes;
- Diagnósticos avanzados en dispositivo y proceso - Compensación de flujo - Integración - Selección de variables - Calculo de masa y Nivel HTG
Density
Volume
Level
Mass
Procesamiento de datos - FlexibilidadProcesamiento de datos - FlexibilidadProcesamiento de datos - FlexibilidadProcesamiento de datos - Flexibilidad
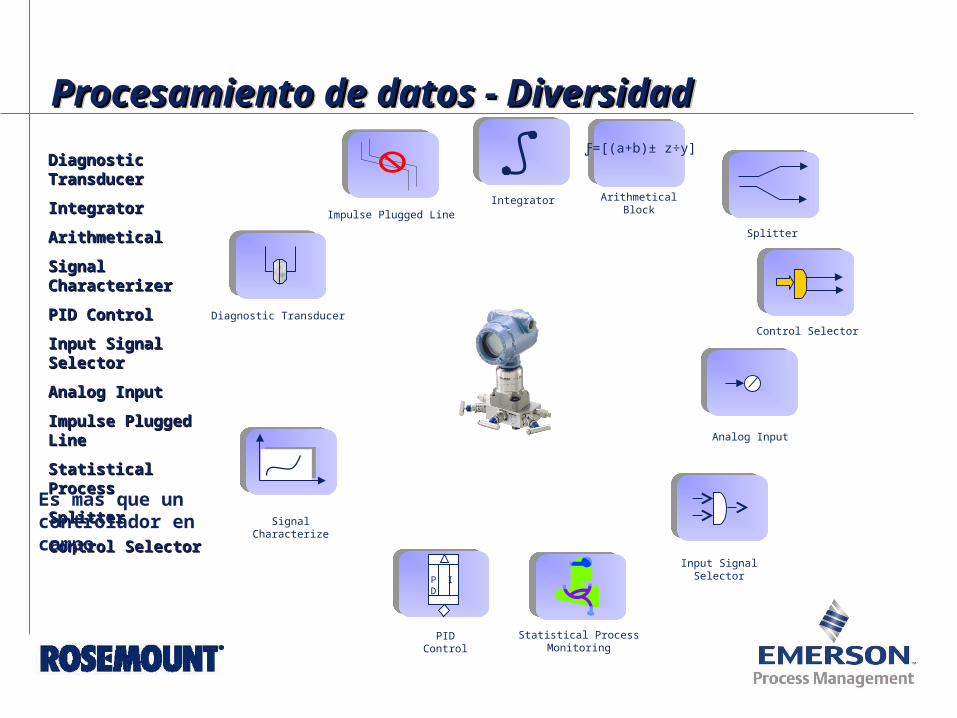
Diagnostic Transducer
Analog Input
SignalCharacterize
Input SignalSelectorP I D
PIDControl
Integrator
Ƒ=[(a+b)± z÷y]
ArithmeticalBlock
Diagnostic TransducerDiagnostic Transducer
IntegratorIntegrator
ArithmeticalArithmetical
Signal CharacterizerSignal Characterizer
PID ControlPID Control
Input Signal SelectorInput Signal Selector
Analog InputAnalog Input
Impulse Plugged LineImpulse Plugged Line
Statistical ProcessStatistical Process
SplitterSplitter
Control SelectorControl Selector
Es mas que un controlador en campo
Statistical ProcessMonitoring
Impulse Plugged Line
Splitter
Control Selector
Procesamiento de datos - Diversidad Procesamiento de datos - Diversidad Procesamiento de datos - Diversidad Procesamiento de datos - Diversidad
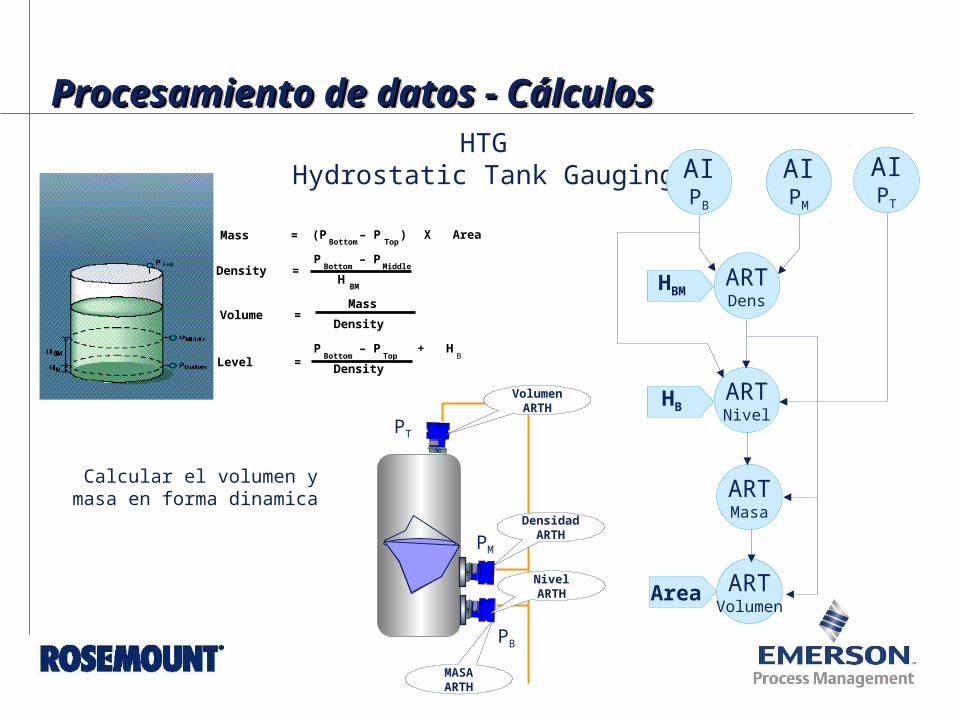
HTGHydrostatic Tank Gauging
(PBottom
– PTop
) X Area
PBottom
– PMiddle
HBM
Mass
Density
PBottom
– PTop
+ H
B
Density
Density =
Volume =
Level =
Mass =
NivelARTH
DensidadARTH
VolumenARTH
MASAARTH
PB
PM
PT
AIPB
AIPM
AIPT
ARTDens
HBM
ARTNivel
HB
ARTMasa
ARTVolumen
Area
Calcular el volumen y masa en forma dinamica
Procesamiento de datos - Cálculos Procesamiento de datos - Cálculos Procesamiento de datos - Cálculos Procesamiento de datos - Cálculos
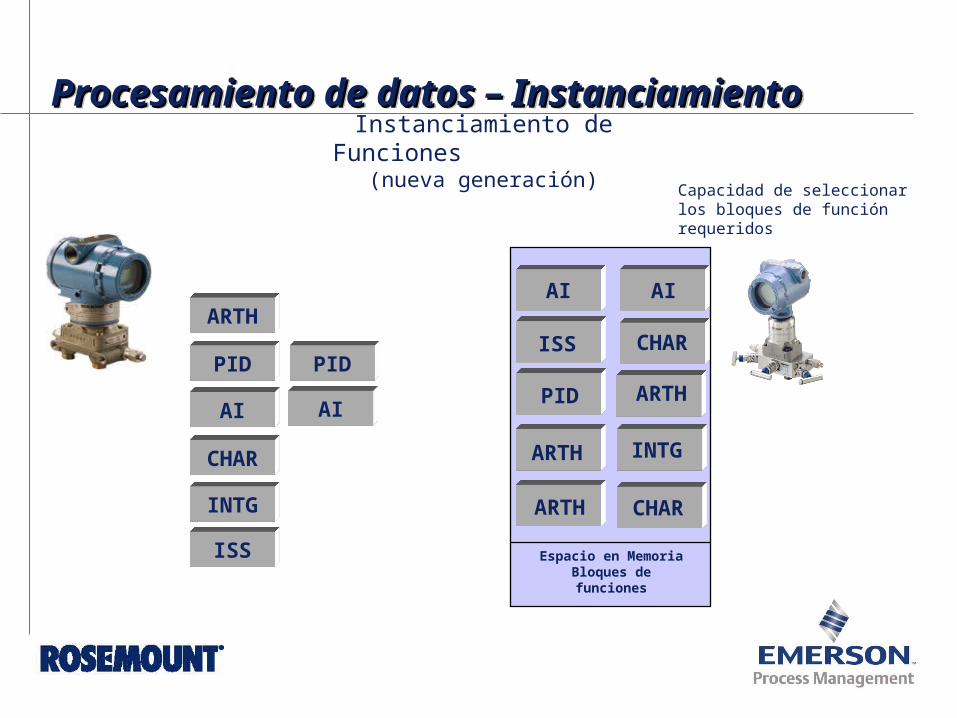
Instanciamiento de Funciones (nueva generación)
ARTH
PID
AI AI
CHAR
INTG
ISS
PID
Capacidad de seleccionar los bloques de función requeridos
AI AI
PID ARTH
ARTH
ARTH
INTG
ISS
CHAR
CHAR
Espacio en Memoria Bloques de funciones
Procesamiento de datos – InstanciamientoProcesamiento de datos – InstanciamientoProcesamiento de datos – InstanciamientoProcesamiento de datos – Instanciamiento

Es la capacidad de los equipos o dispositivos para intercambiar información entre sí y realizar funciones en conjunto sin degradación de la información bajo un mismo ambiente.
Interoperabilidad
smar
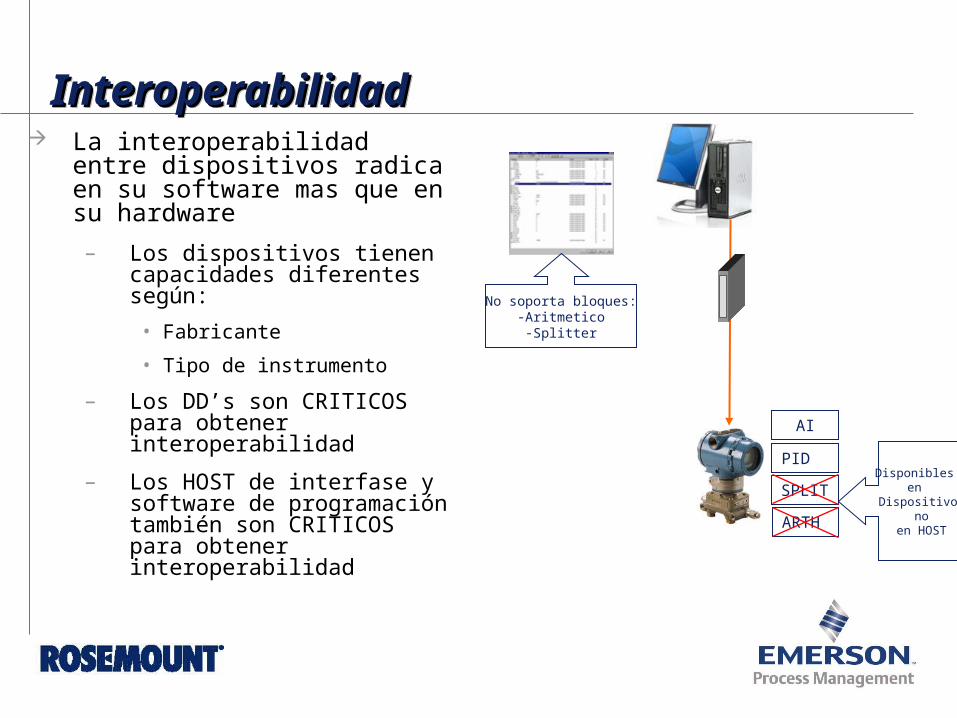
InteroperabilidadInteroperabilidadInteroperabilidadInteroperabilidad La interoperabilidad entre
dispositivos radica en su software mas que en su hardware
– Los dispositivos tienen capacidades diferentes según:
• Fabricante
• Tipo de instrumento
– Los DD’s son CRITICOS para obtener interoperabilidad
– Los HOST de interfase y software de programación también son CRITICOS para obtener interoperabilidad
No soporta bloques:-Aritmetico
-Splitter
ARTH
SPLIT
AI
PIDDisponibles
en Dispositivo
no en HOST

Certificacion
La Organizacion Fieldbus Foundation realiza pruebas rigurosas para otorgar el registro de los dispositivos que ostentan el logotipo de cumplimiento.
Son los archivos que especifican las características de cada uno de los dispositivos y sus capacidades.
Los archivos DD’s indicados por la FieldbusTM Foundation son tres;
• xxxx.sym
• xxxx.ffo
• xxxx.cff
Device Descriptors Device Descriptors Device Descriptors Device Descriptors www.fieldbus.org

Device Descriptors – DescargaDevice Descriptors – DescargaDevice Descriptors – DescargaDevice Descriptors – DescargaArchivos DD’s disponible en linea sin cargo
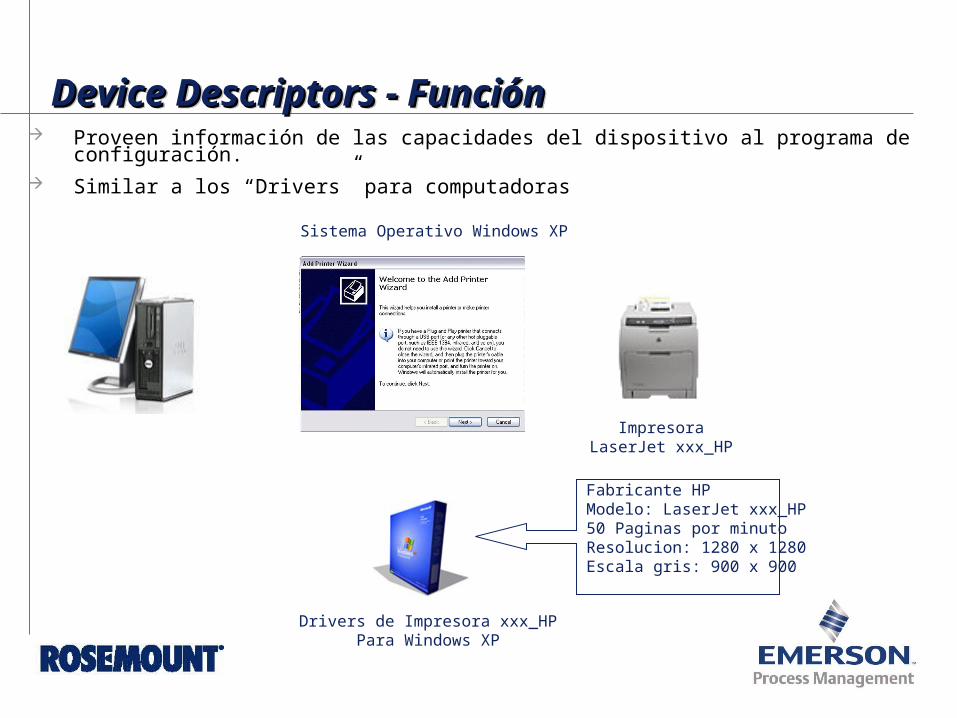
Device Descriptors - Función Device Descriptors - Función Device Descriptors - Función Device Descriptors - Función Proveen información de las capacidades del dispositivo al programa de configuración. Similar a los “Drivers” para computadoras
Sistema Operativo Windows XP
Drivers de Impresora xxx_HPPara Windows XP
ImpresoraLaserJet xxx_HP
Fabricante HPModelo: LaserJet xxx_HP50 Paginas por minutoResolucion: 1280 x 1280Escala gris: 900 x 900
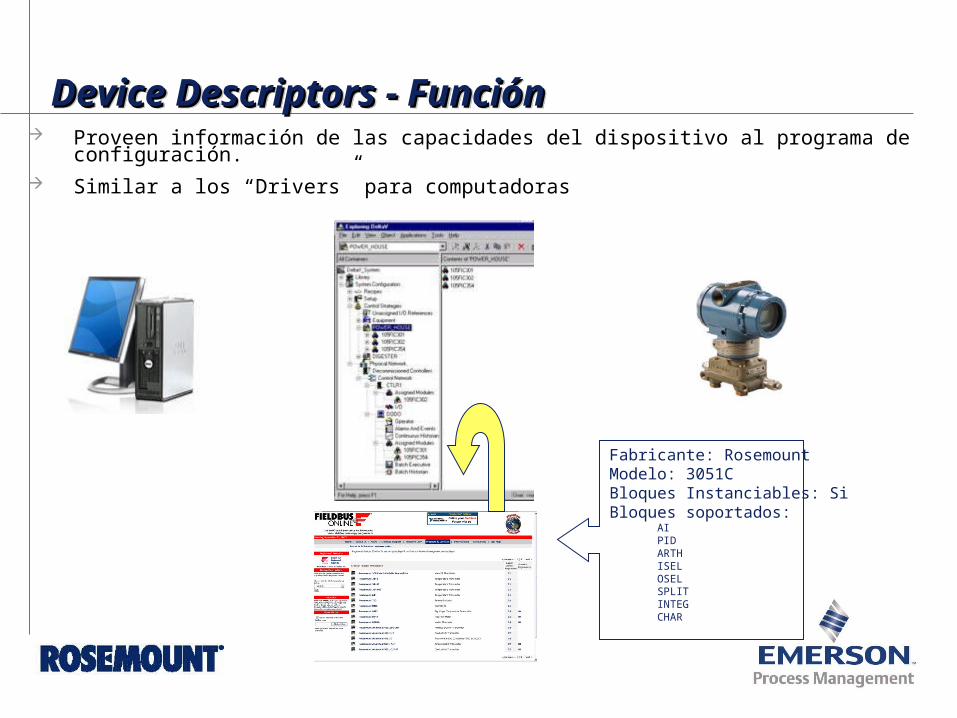
Device Descriptors - Función Device Descriptors - Función Device Descriptors - Función Device Descriptors - Función Proveen información de las capacidades del dispositivo al programa de configuración. Similar a los “Drivers” para computadoras
Fabricante: RosemountModelo: 3051CBloques Instanciables: SiBloques soportados:
AIPIDARTHISELOSELSPLITINTEGCHAR
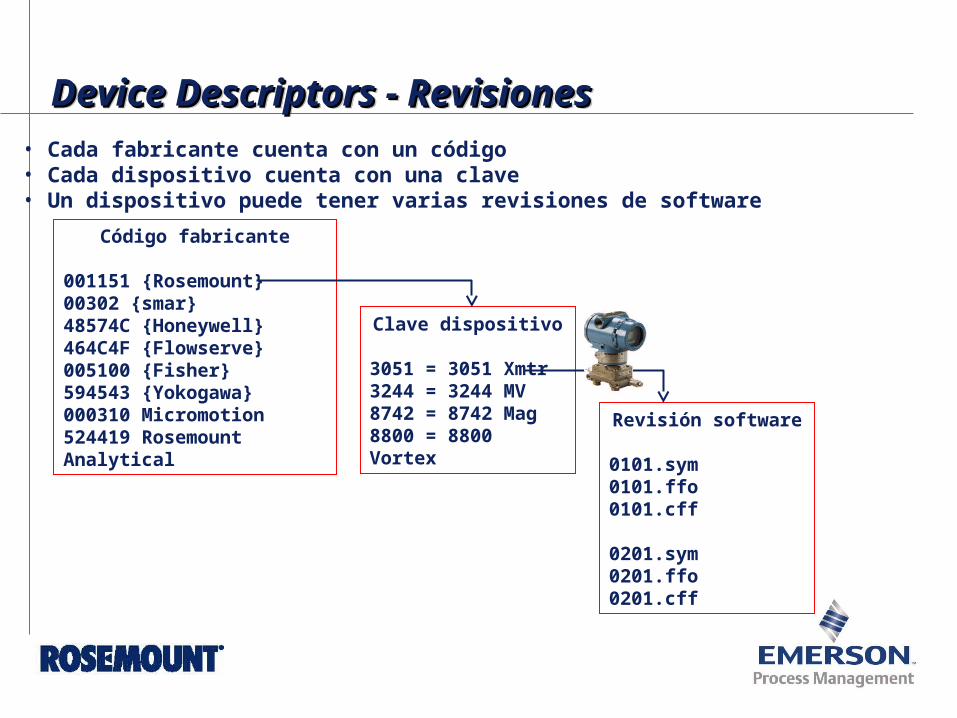
• Cada fabricante cuenta con un código• Cada dispositivo cuenta con una clave• Un dispositivo puede tener varias revisiones de software
Código fabricante
001151 {Rosemount} 00302 {smar}48574C {Honeywell}464C4F {Flowserve}005100 {Fisher}594543 {Yokogawa}000310 Micromotion524419 Rosemount Analytical
Clave dispositivo
3051 = 3051 Xmtr3244 = 3244 MV8742 = 8742 Mag8800 = 8800 Vortex
Revisión software
0101.sym0101.ffo0101.cff
0201.sym0201.ffo0201.cff
Device Descriptors - Revisiones Device Descriptors - Revisiones Device Descriptors - Revisiones Device Descriptors - Revisiones
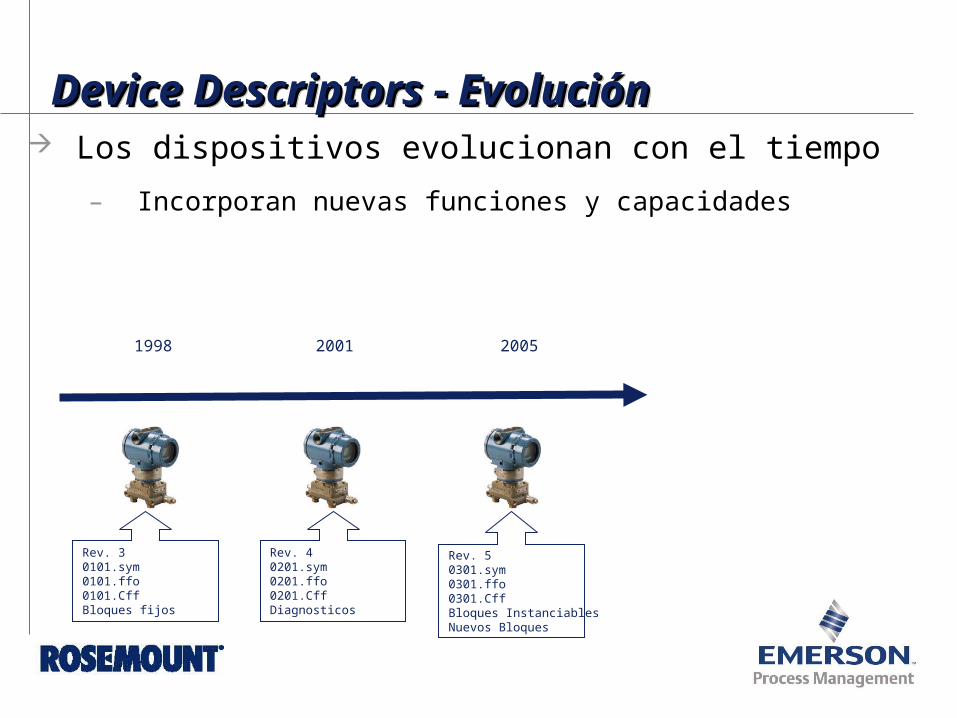
Device Descriptors - EvoluciónDevice Descriptors - EvoluciónDevice Descriptors - EvoluciónDevice Descriptors - Evolución Los dispositivos evolucionan con el tiempo
– Incorporan nuevas funciones y capacidades
1998 2001 2005
Rev. 30101.sym0101.ffo0101.CffBloques fijos
Rev. 40201.sym0201.ffo0201.CffDiagnosticos
Rev. 50301.sym0301.ffo0301.CffBloques InstanciablesNuevos Bloques
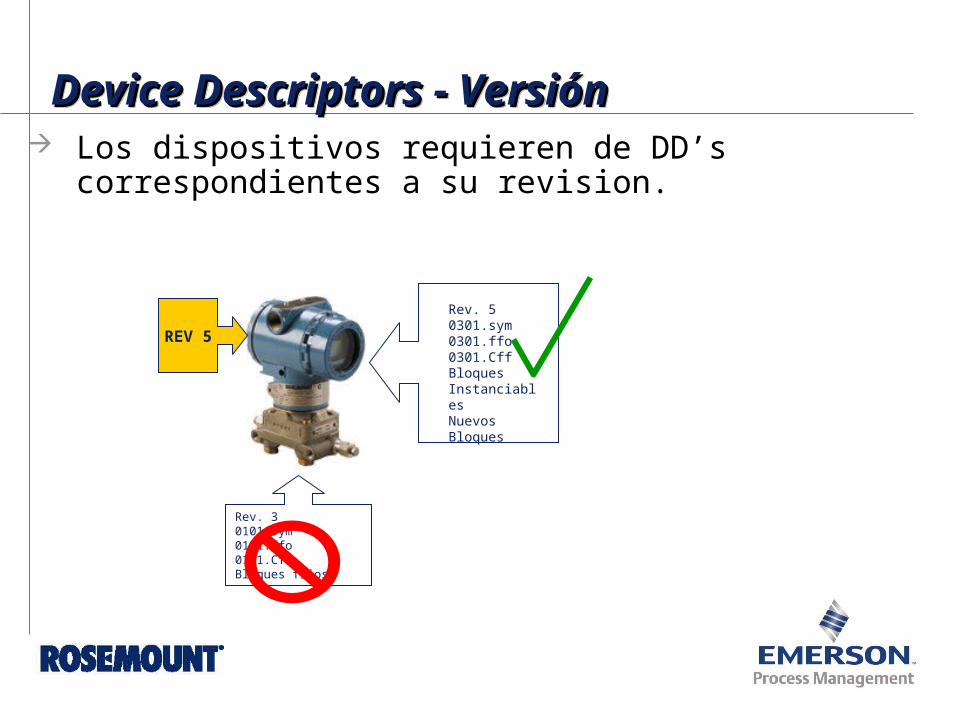
Device Descriptors - VersiónDevice Descriptors - VersiónDevice Descriptors - VersiónDevice Descriptors - Versión Los dispositivos requieren de DD’s correspondientes a su
revision.
Rev. 30101.sym0101.ffo0101.CffBloques fijos
REV 5
Rev. 50301.sym0301.ffo0301.CffBloques InstanciablesNuevos Bloques
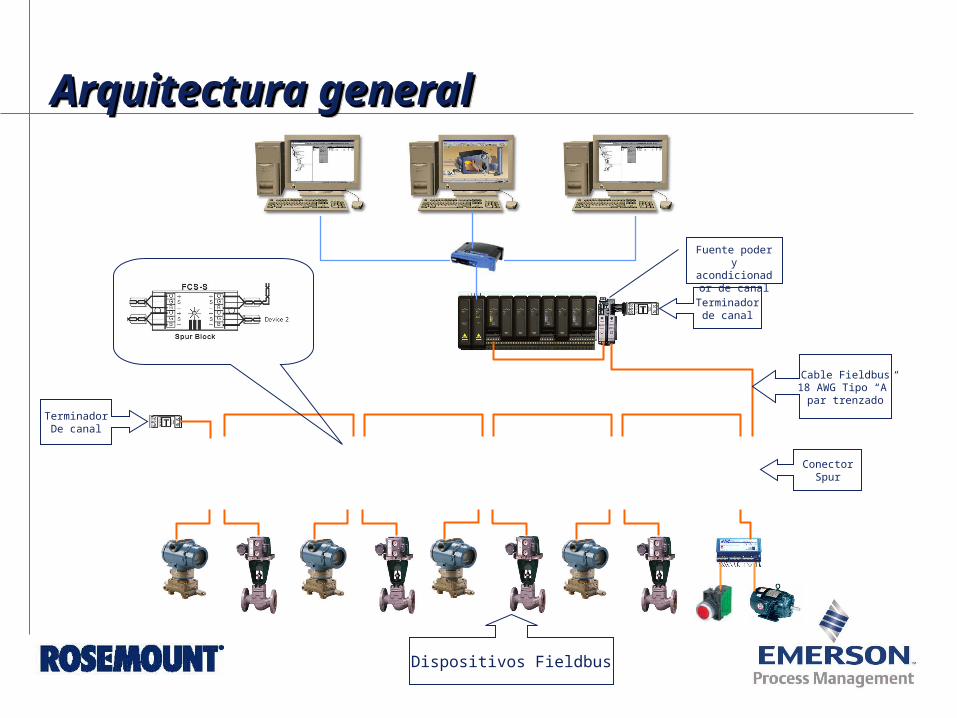
Arquitectura generalArquitectura generalArquitectura generalArquitectura general
Terminadorde canal
ConectorSpur
Cable Fieldbus18 AWG Tipo “A”
par trenzado
TerminadorDe canal
Fuente poder y acondicionador
de canal
Dispositivos Fieldbus
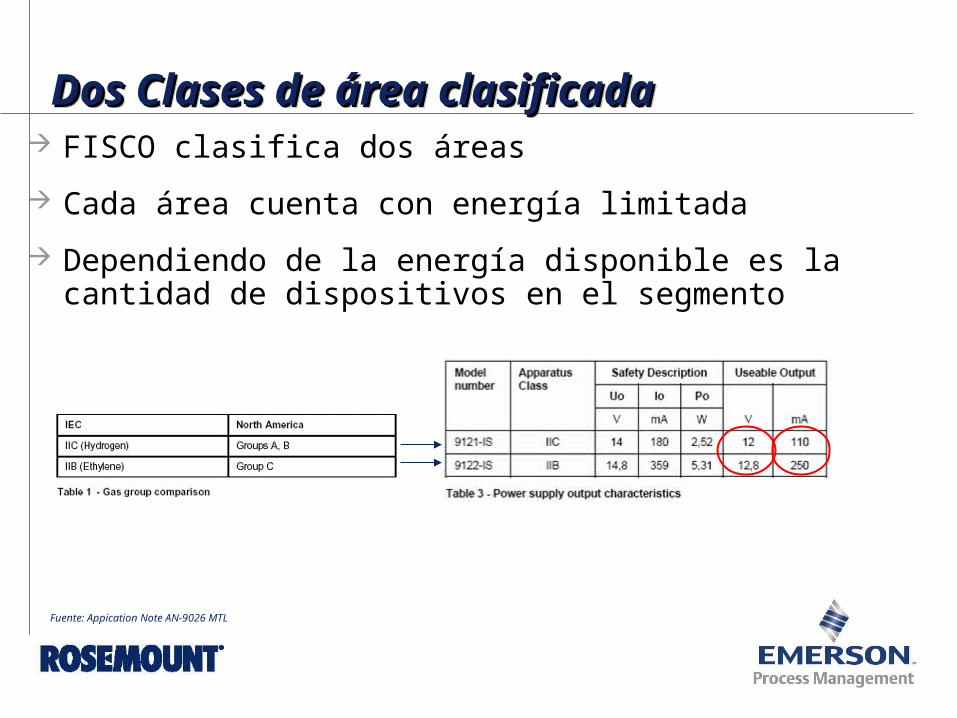
Dos Clases de área clasificadaDos Clases de área clasificadaDos Clases de área clasificadaDos Clases de área clasificada FISCO clasifica dos áreas
Cada área cuenta con energía limitada
Dependiendo de la energía disponible es la cantidad de dispositivos en el segmento
Fuente: Appication Note AN-9026 MTL
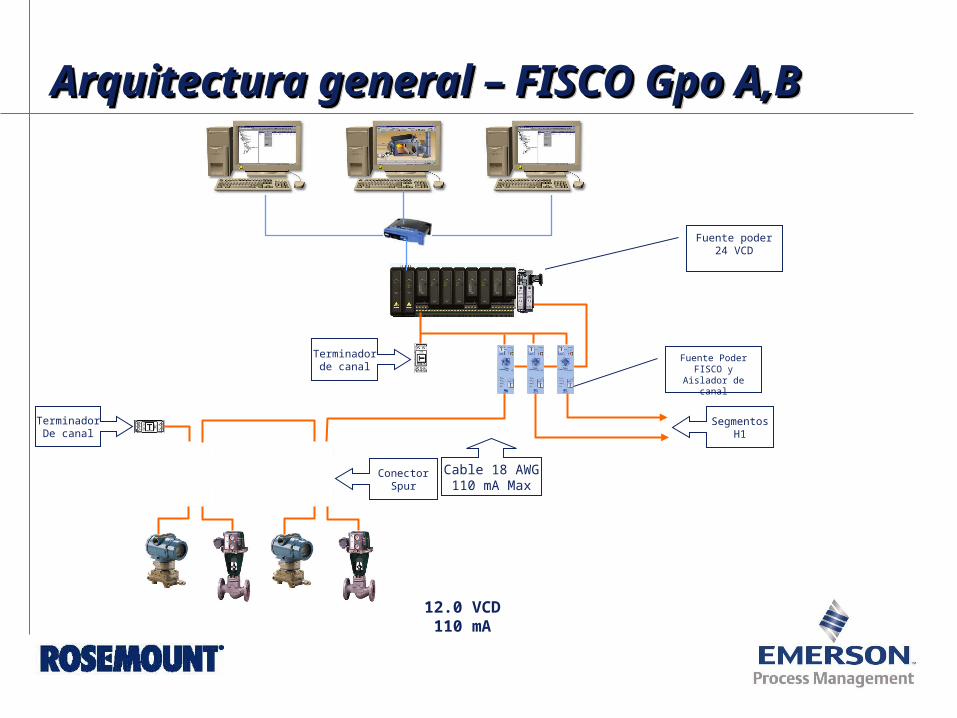
Arquitectura general – FISCO Gpo A,BArquitectura general – FISCO Gpo A,BArquitectura general – FISCO Gpo A,BArquitectura general – FISCO Gpo A,B
Terminadorde canal
ConectorSpur
Fuente poder24 VCD
TerminadorDe canal
Fuente PoderFISCO y Aislador
de canal
Cable 18 AWG110 mA Max
SegmentosH1
12.0 VCD110 mA
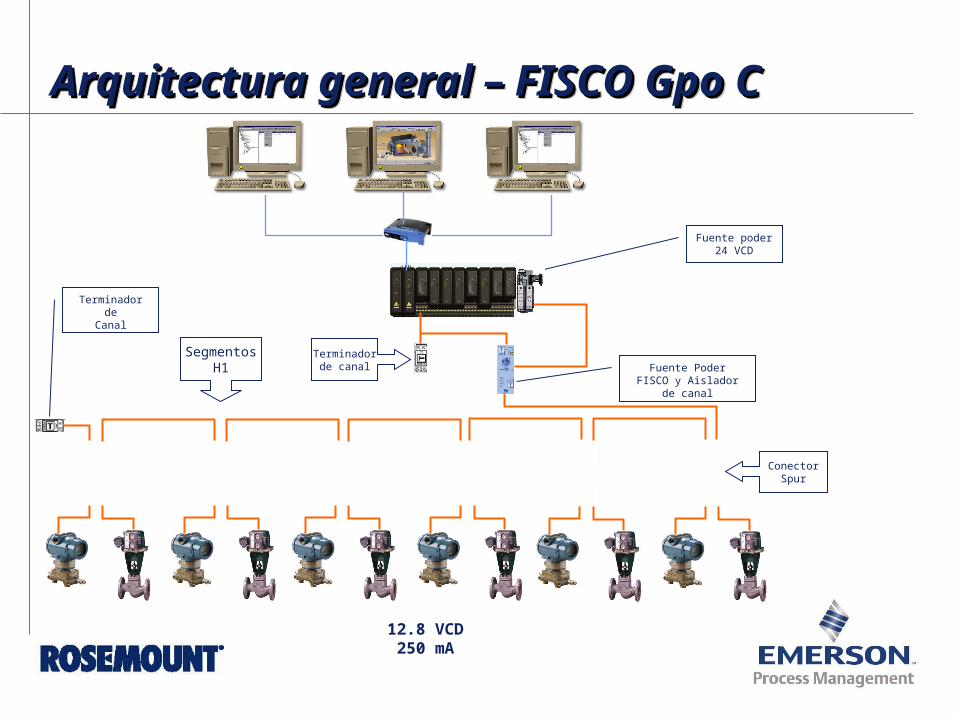
Arquitectura general – FISCO Gpo CArquitectura general – FISCO Gpo CArquitectura general – FISCO Gpo CArquitectura general – FISCO Gpo C
Terminadorde canal
ConectorSpur
Fuente poder24 VCD
Fuente PoderFISCO y Aislador de
canal
SegmentosH1
Terminadorde
Canal
12.8 VCD250 mA
Definiciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y Abreviaciones FoundationTM fieldbus
– Bus de comunicación digital bidireccional
– IEC-61158
H1
– Nivel de comunicación de velocidad moderada
• 31.25 Kbps
• IEC-61158-2
• Par trenzado 18 AWG
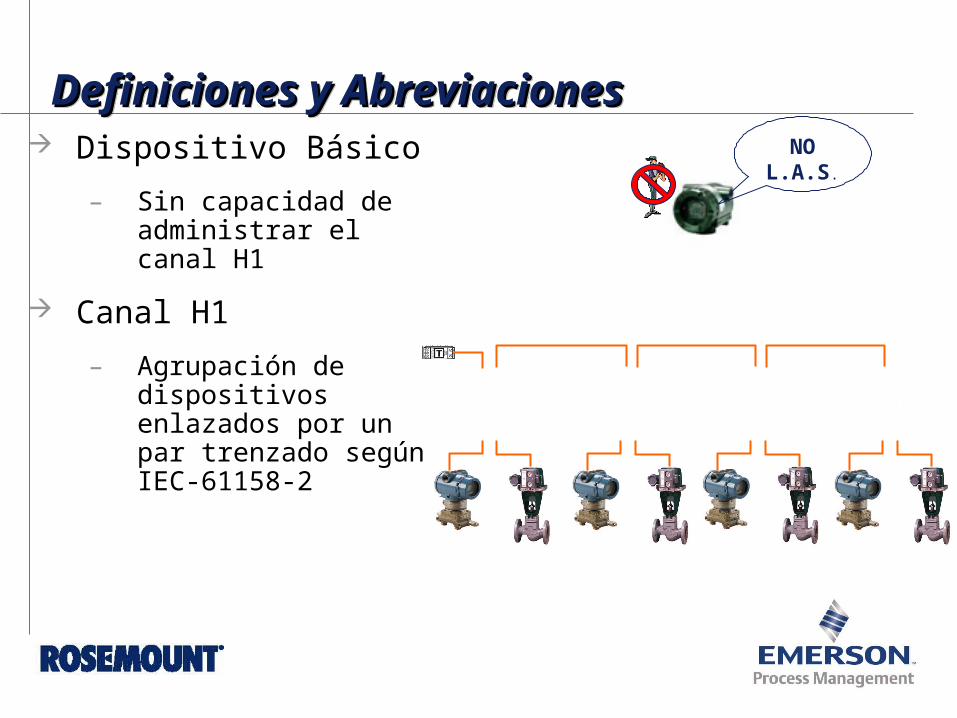
Definiciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y Abreviaciones Dispositivo Básico
– Sin capacidad de administrar el canal H1
Canal H1
– Agrupación de dispositivos enlazados por un par trenzado según IEC-61158-2
NOL.A.S.
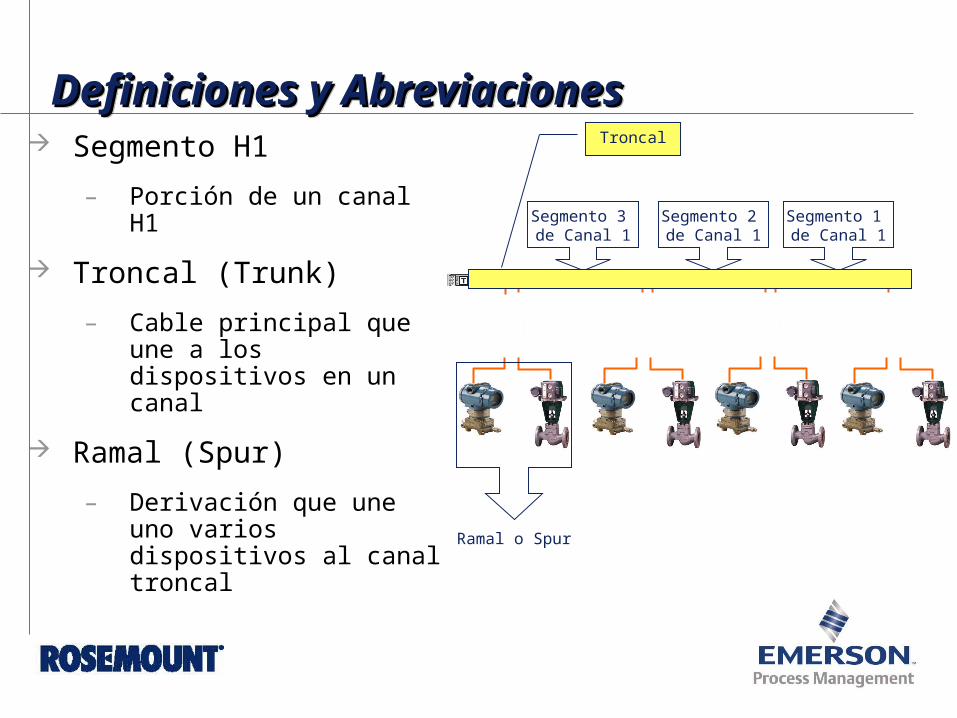
Definiciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y Abreviaciones Segmento H1
– Porción de un canal H1
Troncal (Trunk)
– Cable principal que une a los dispositivos en un canal
Ramal (Spur)
– Derivación que une uno varios dispositivos al canal troncal
Segmento 1 de Canal 1
Segmento 2 de Canal 1
Segmento 3 de Canal 1
Ramal o Spur
Troncal
Definiciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y Abreviaciones Capabilities File (CFF)
– Archivo electrónico que contiene las capacidades del dispositivo en cuestión.
– Permite configurar el dispositivo fuera de línea (Off_line)
– Archivo reside en el programa de configuración
Determinístico
– Habilidad para determinar el tiempo que se lleva la transmisión de un mensaje entre dos nodos.
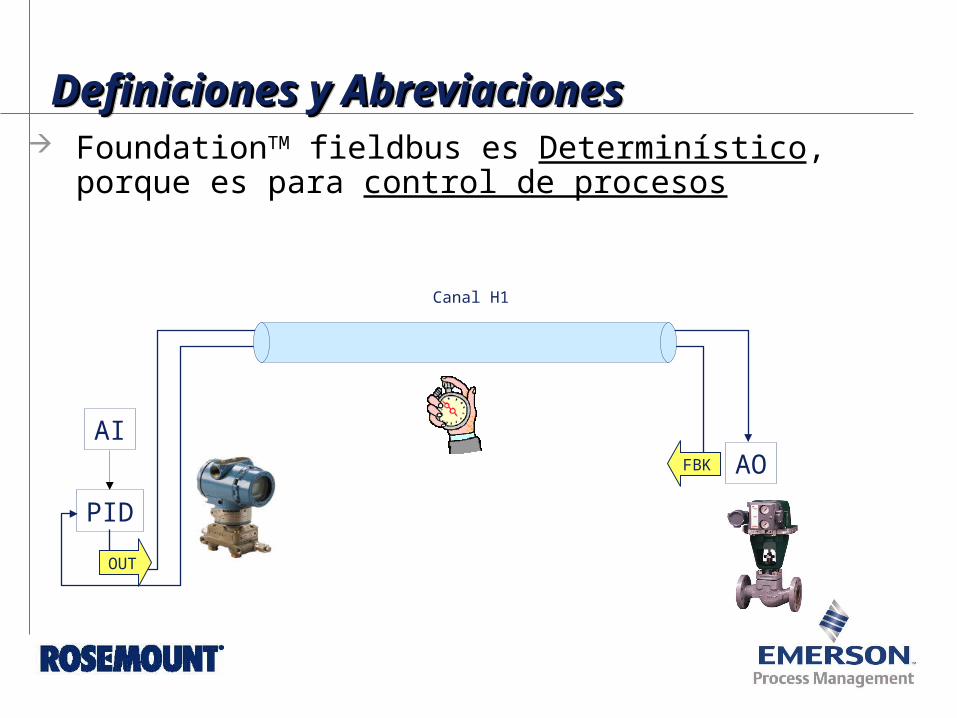
Definiciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y Abreviaciones FoundationTM fieldbus es Determinístico, porque es para
control de procesos
AI
PID
AO
Canal H1
OUT
FBK
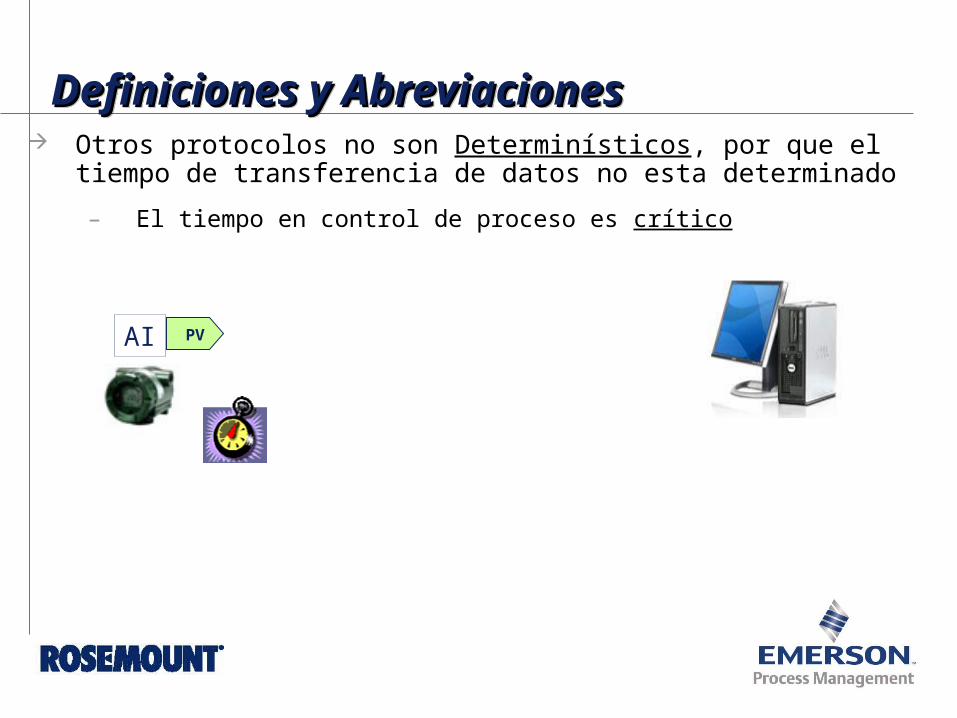
Definiciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y Abreviaciones Otros protocolos no son Determinísticos, por que el tiempo de
transferencia de datos no esta determinado
– El tiempo en control de proceso es crítico
AI PV
Definiciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y Abreviaciones DD o Device Descriptor
– Archivos electrónicos que describen las capacidades del dispositivo, residentes en software de programación.
– Disponibles en www.fieldbus.org
Fieldbus
– Bus de comunicación digital en campo
FF
– FoundationTM fieldbus según IEC-61158
FISCO
– Fieldbus Intrinsically Safe COncept
– Concepto para seguridad intrínseca para canales fieldbus
Definiciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y Abreviaciones H1
– Termino usado para describir una red fieldbus de velocidad moderada. 31.25 Kbps
Dispositivo H1
– Dispositivo que se conecta a una red fieldbus H1 directamente
Repetidor H1
– Dispositivo activo usado para interconectar segmentos H1 aumentando la distancia, la cantidad máxima de repetidores es de 4 en un canal. 1,900 +( 4 x 1900 Mts) = 9,500 Mts.
Prueba de Interoperabilidad ITK (Interoperable Test Kit)
– Protocolo de pruebas realizado por la fieldbus Foundation para otorgar el registro de aceptación, es una prueba on/off
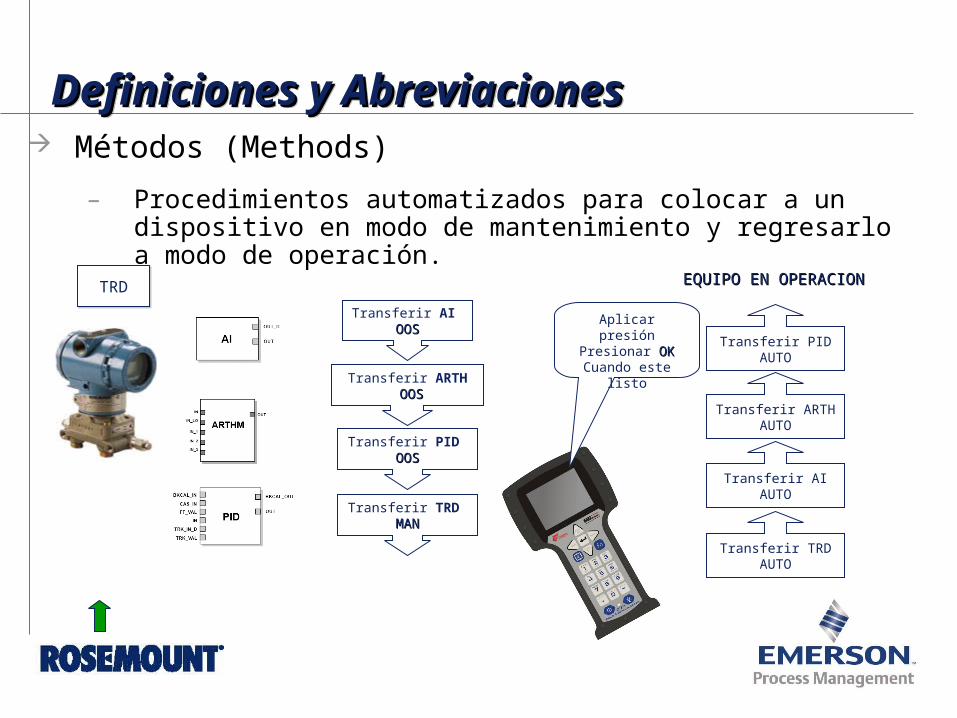
Definiciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y Abreviaciones Métodos (Methods)
– Procedimientos automatizados para colocar a un dispositivo en modo de mantenimiento y regresarlo a modo de operación.
Transferir AI OOSOOS
Transferir ARTH OOSOOS
Transferir PID OOSOOS
Transferir TRD MANMAN
TRDTRD
Aplicar presiónPresionar OKOK
Cuando este listo
Transferir TRDAUTO
Transferir AIAUTO
Transferir ARTHAUTO
Transferir PIDAUTO
EQUIPO EN OPERACIONEQUIPO EN OPERACION
Definiciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y Abreviaciones Bloque de función (FB)
– Algoritmos programados residentes en los dispositivos para procesar información y/o variables de proceso:
• Calculo
• Control
• Selección
• Tipo y cantidad depende de fabricante
Bloque Transductor (TB)– Función que convierte una señal física a información digital y viceversa
– Un TB por cada sensor o salida física
Bloque de Recursos (RB)– Describe las características del dispositivo:
• Fabricante
• Numero de serie
• Revisión de software
• Equivalente al interruptor general del dispositivo en cuestión de funcionalidad
• Solo un RB en dispositivo
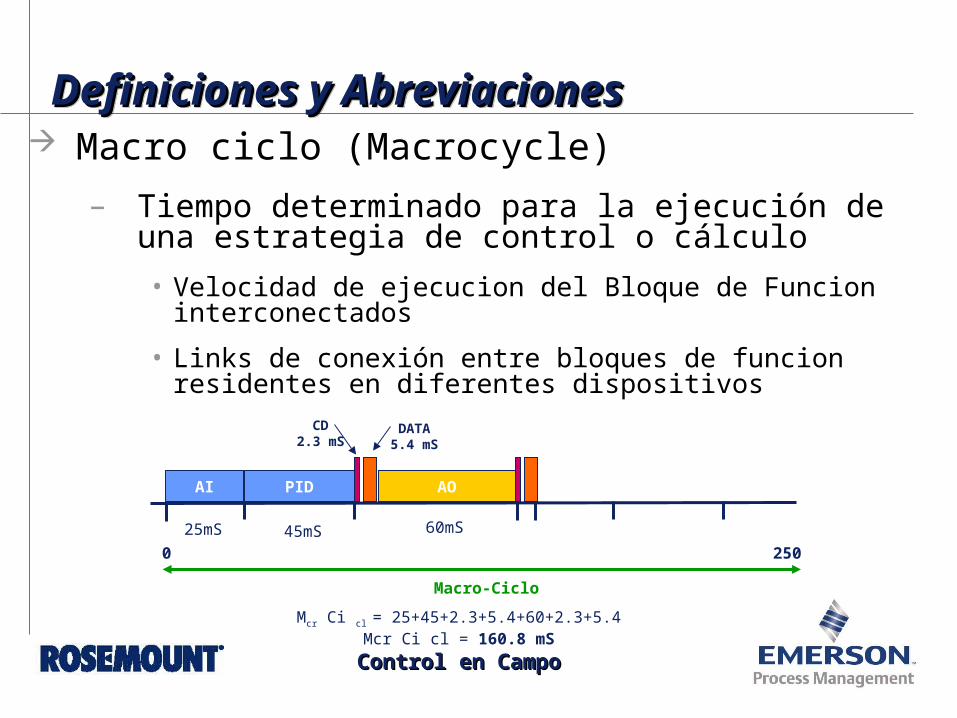
Definiciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y Abreviaciones Macro ciclo (Macrocycle)
– Tiempo determinado para la ejecución de una estrategia de control o cálculo
• Velocidad de ejecucion del Bloque de Funcion interconectados
• Links de conexión entre bloques de funcion residentes en diferentes dispositivos
AI PID AO
25mS 45mS
CD2.3 mS
DATA5.4 mS
60mS
0 250
Macro-Ciclo
Mcr Ci cl = 25+45+2.3+5.4+60+2.3+5.4Mcr Ci cl = 160.8 mS
Control en CampoControl en Campo
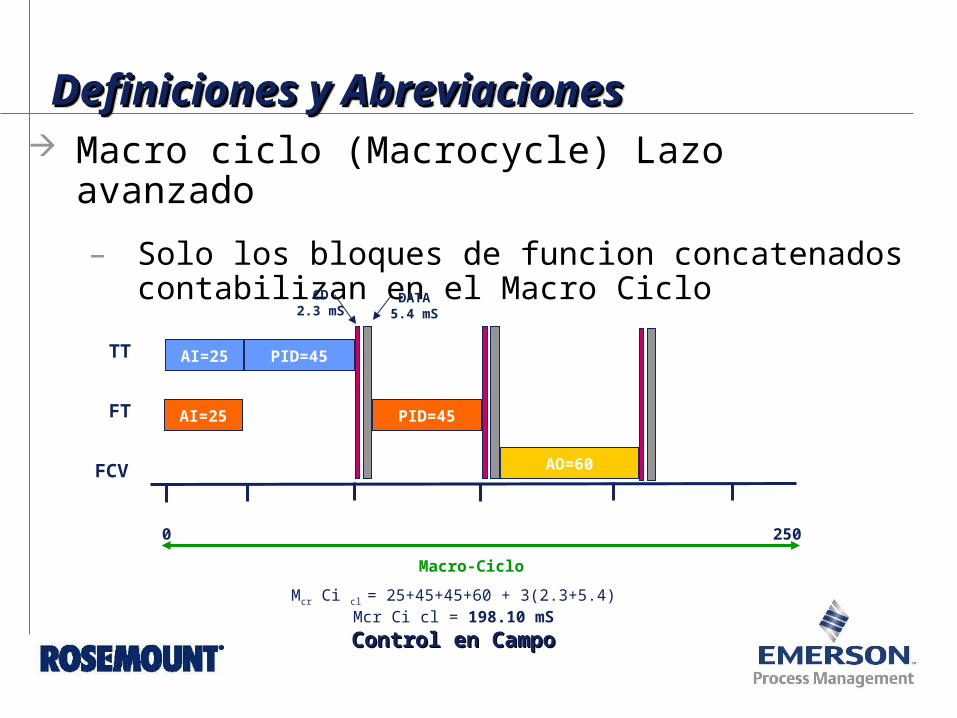
Definiciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y Abreviaciones Macro ciclo (Macrocycle) Lazo avanzado
– Solo los bloques de funcion concatenados contabilizan en el Macro Ciclo
AI=25 PID=45
AO=60
CD2.3 mS
DATA5.4 mS
0 250
Macro-Ciclo
Mcr Ci cl = 25+45+45+60 + 3(2.3+5.4)Mcr Ci cl = 198.10 mS
Control en CampoControl en Campo
AI=25 PID=45
TT
FT
FCV
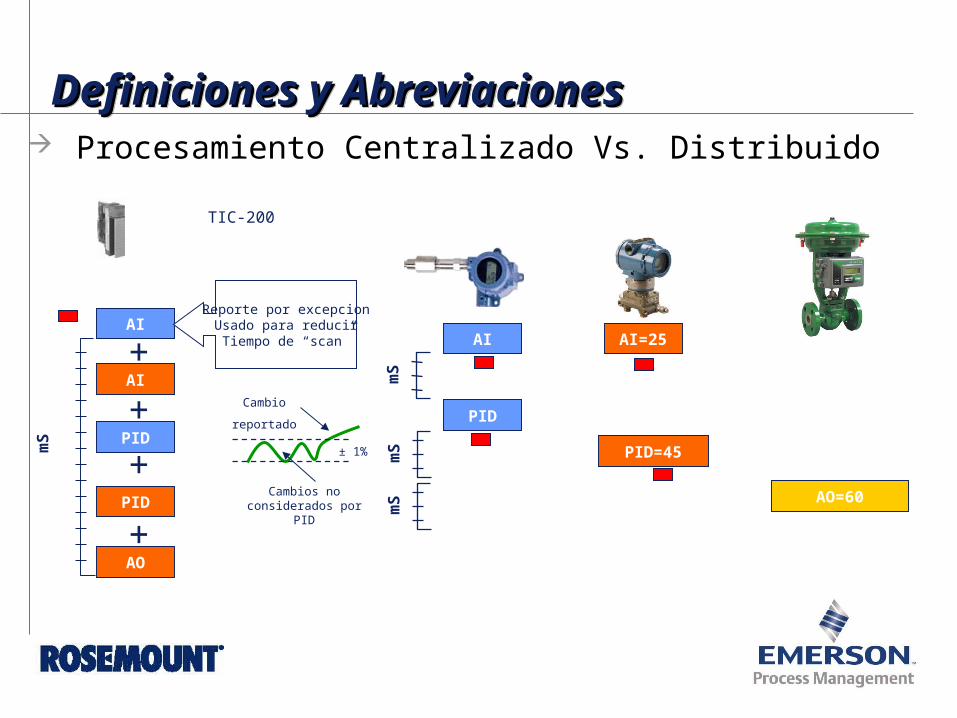
Definiciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y Abreviaciones Procesamiento Centralizado Vs. Distribuido
AI
PID
AO=60
AI=25
PID=45
TIC-200
AI
PID
AO
AI
PID
Reporte por excepcionUsado para reducirTiempo de “scan”+
+
+
+
mS
mS
mS
mS
± 1%
Cambios no considerados por PID
Cambio
reportado
PV
Set
Po
int
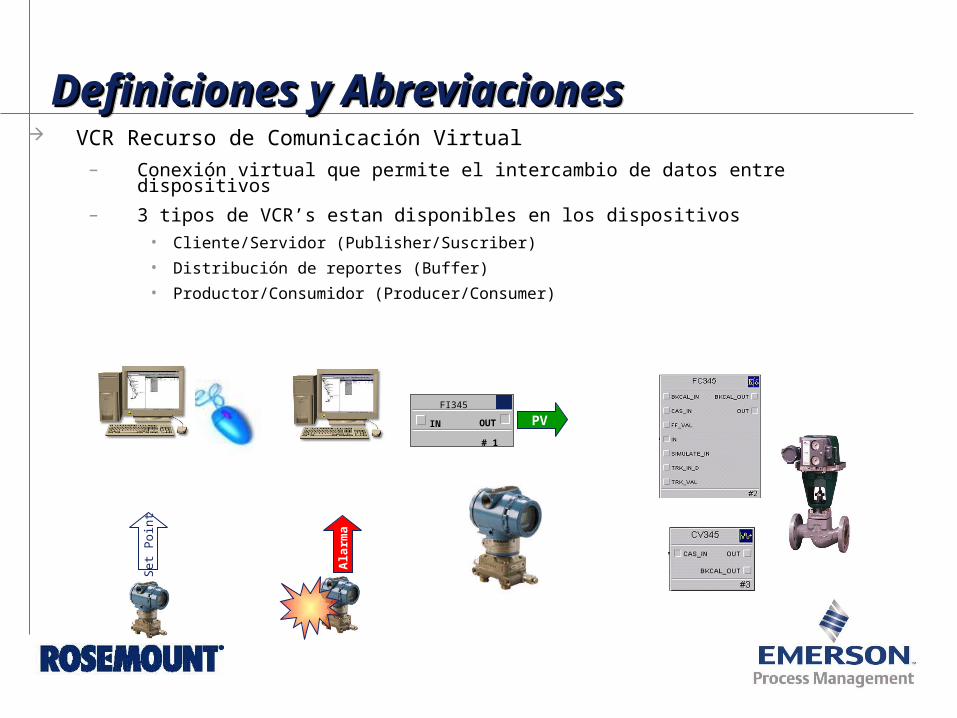
Definiciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y AbreviacionesDefiniciones y Abreviaciones VCR Recurso de Comunicación Virtual
– Conexión virtual que permite el intercambio de datos entre dispositivos
– 3 tipos de VCR’s estan disponibles en los dispositivos• Cliente/Servidor (Publisher/Suscriber)
• Distribución de reportes (Buffer)
• Productor/Consumidor (Producer/Consumer)
Ala
rma
FI345
IN OUT
# 1
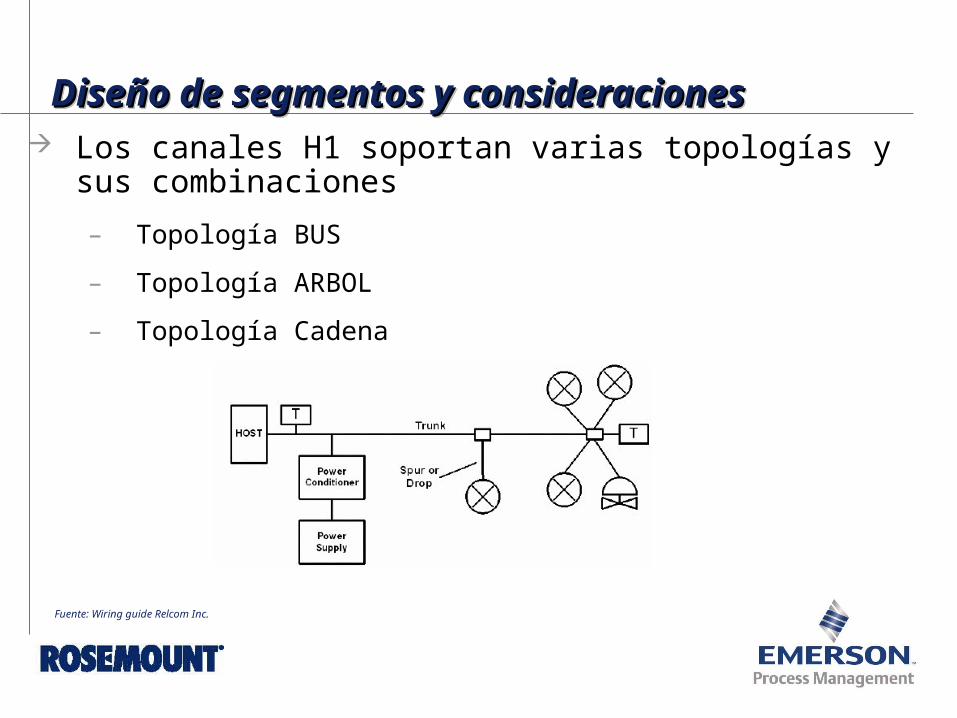
Diseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideraciones Los canales H1 soportan varias topologías y sus
combinaciones
– Topología BUS
– Topología ARBOL
– Topología Cadena
Fuente: Wiring guide Relcom Inc.
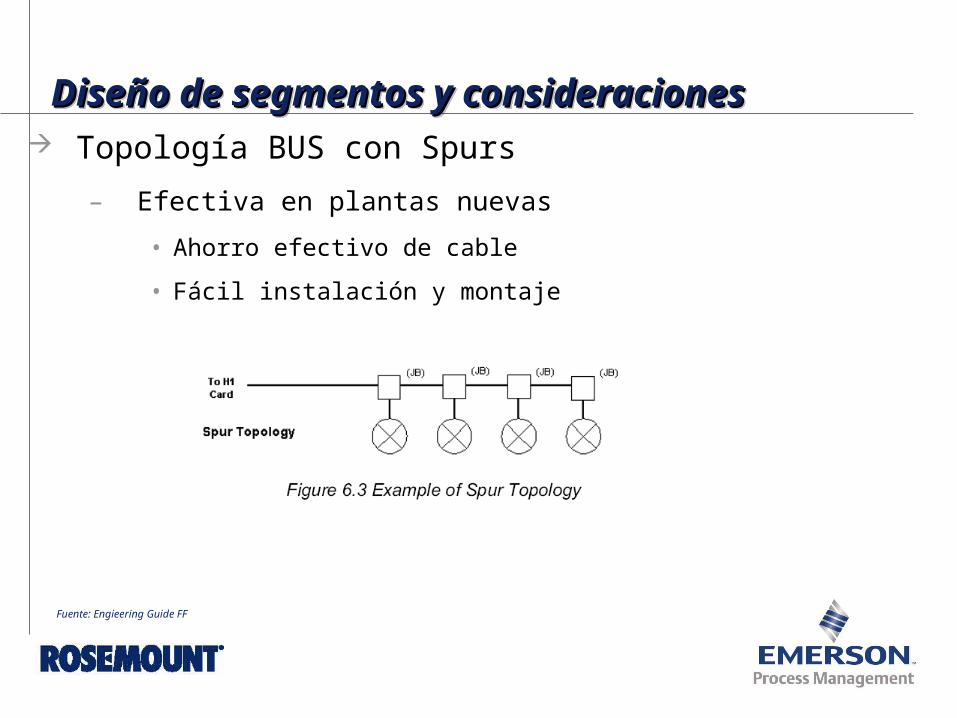
Diseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideraciones Topología BUS con Spurs
– Efectiva en plantas nuevas
• Ahorro efectivo de cable
• Fácil instalación y montaje
Fuente: Engieering Guide FF
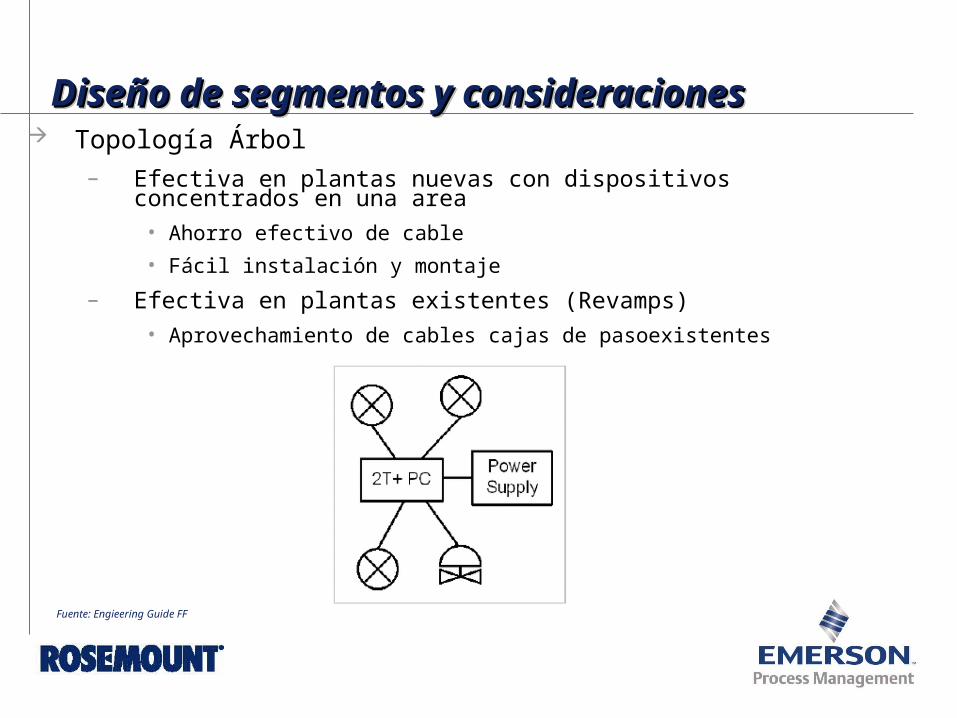
Diseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideraciones Topología Árbol
– Efectiva en plantas nuevas con dispositivos concentrados en una area• Ahorro efectivo de cable
• Fácil instalación y montaje
– Efectiva en plantas existentes (Revamps)• Aprovechamiento de cables cajas de pasoexistentes
Fuente: Engieering Guide FF
Diseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideraciones Topología Cadena “Daisy Chain”
– No recomendable para instalaciones industriales
• La interrupción de un dispositivo afecta al resto
Fuente: Engieering Guide FF
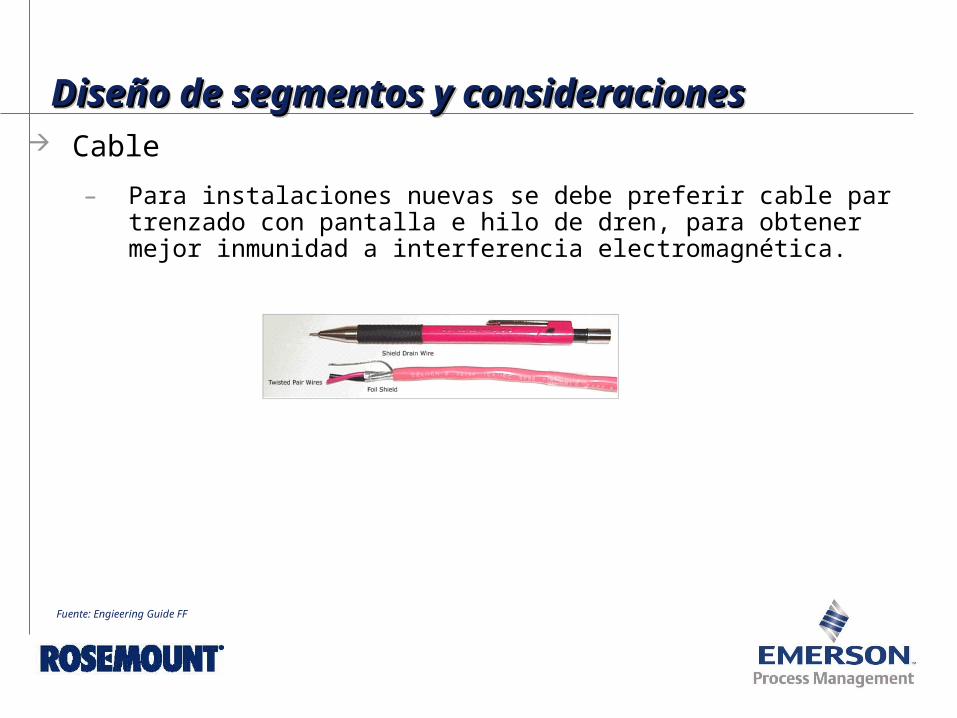
Diseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideraciones Cable
– Para instalaciones nuevas se debe preferir cable par trenzado con pantalla e hilo de dren, para obtener mejor inmunidad a interferencia electromagnética.
Fuente: Engieering Guide FF
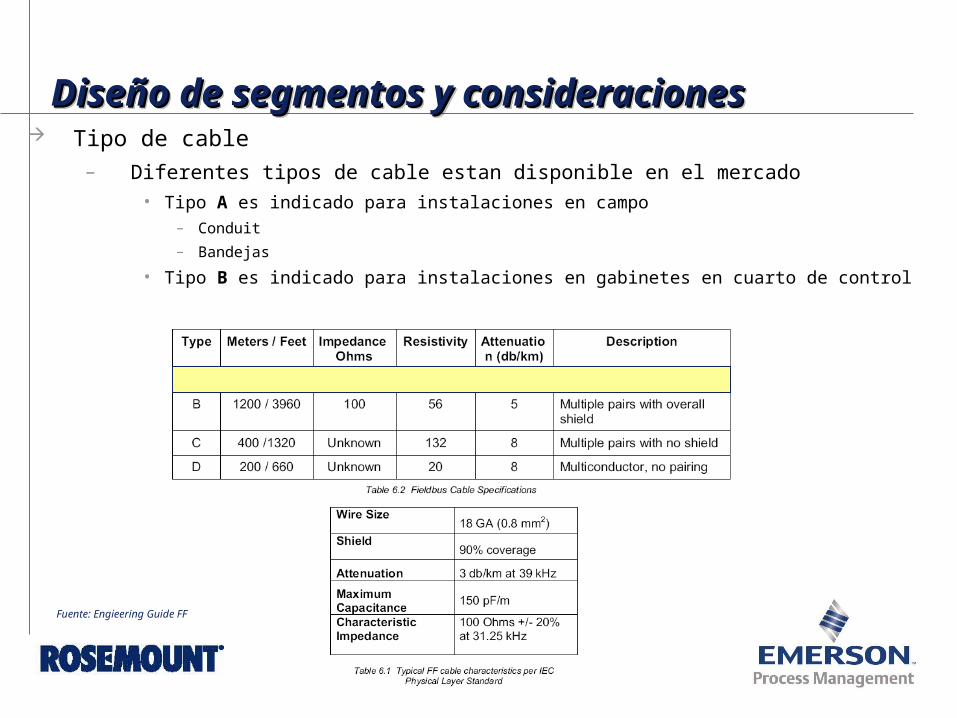
Diseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideraciones Tipo de cable
– Diferentes tipos de cable estan disponible en el mercado• Tipo A es indicado para instalaciones en campo
– Conduit
– Bandejas
• Tipo B es indicado para instalaciones en gabinetes en cuarto de control
Fuente: Engieering Guide FF
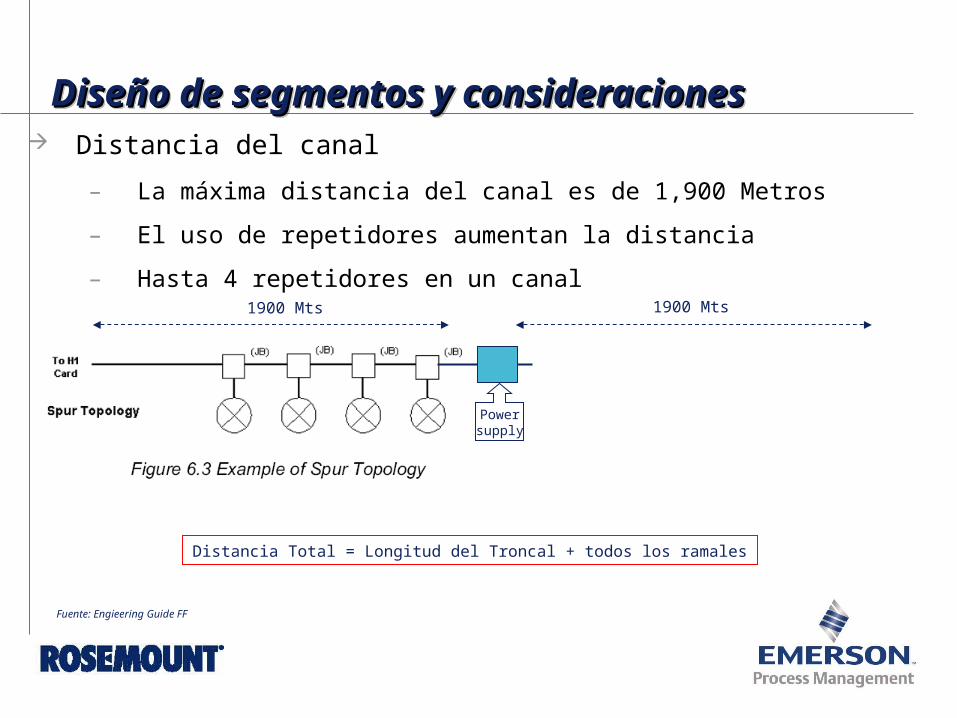
Diseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideraciones Distancia del canal
– La máxima distancia del canal es de 1,900 Metros
– El uso de repetidores aumentan la distancia
– Hasta 4 repetidores en un canal
Fuente: Engieering Guide FF
Powersupply
1900 Mts 1900 Mts
Distancia Total = Longitud del Troncal + todos los ramales
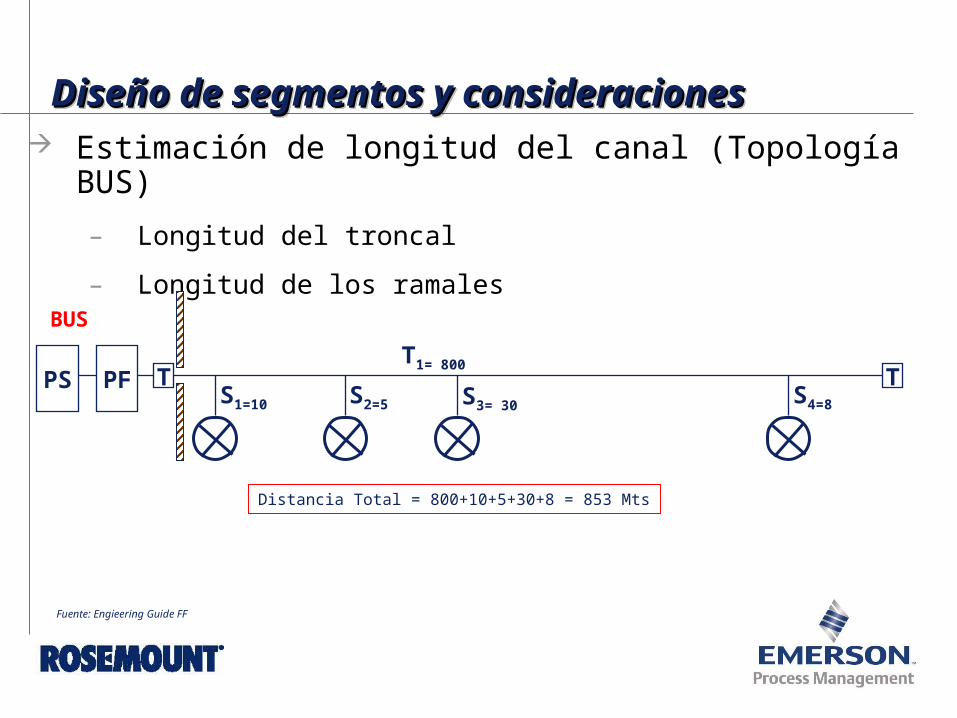
Diseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideraciones Estimación de longitud del canal (Topología BUS)
– Longitud del troncal
– Longitud de los ramales
Fuente: Engieering Guide FF
Distancia Total = 800+10+5+30+8 = 853 Mts
T TT1= 800
S1=10 S2=5 S3= 30 S4=8
PFPS
BUS
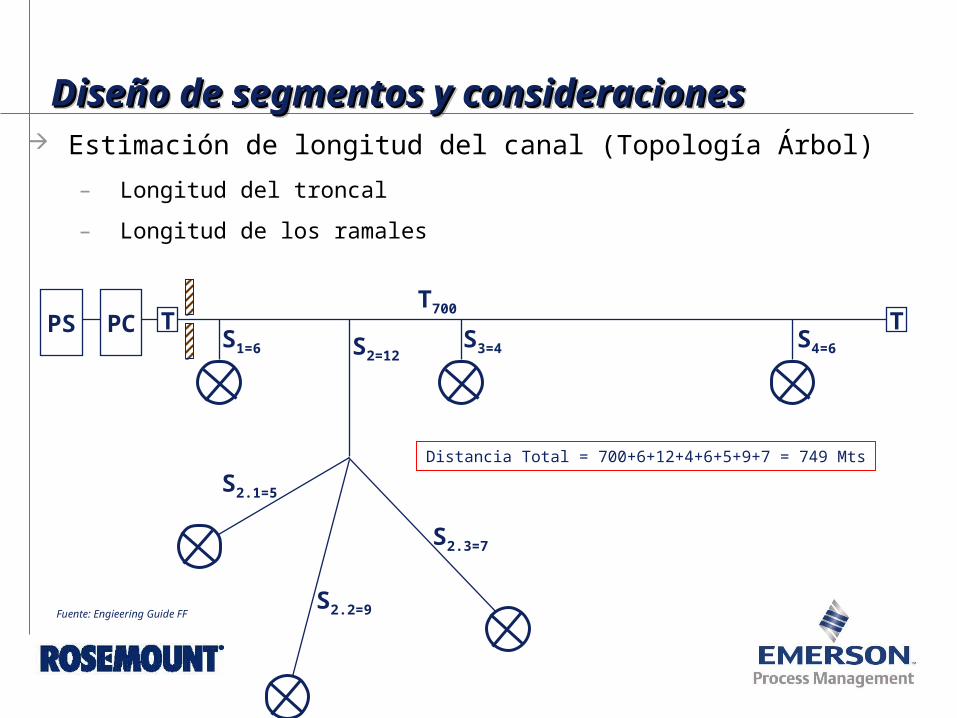
Diseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideraciones Estimación de longitud del canal (Topología Árbol)
– Longitud del troncal
– Longitud de los ramales
Fuente: Engieering Guide FF
Distancia Total = 700+6+12+4+6+5+9+7 = 749 Mts
T TT700
S1=6 S3=4 S4=6
PCPS
S2.3=7
S2.2=9
S2=12
S2.1=5
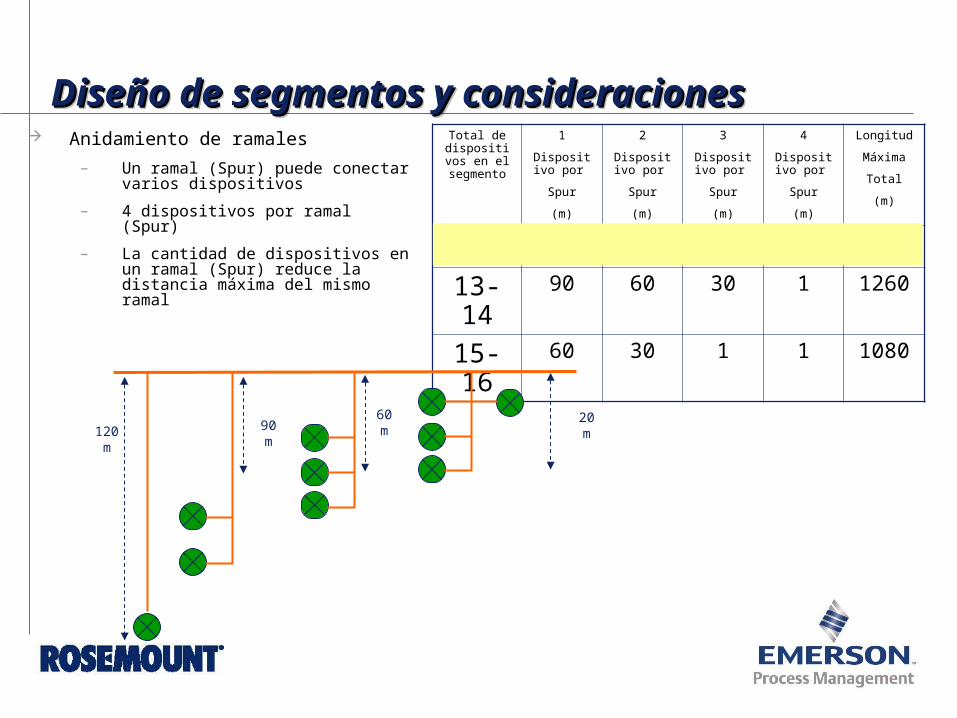
Diseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideraciones Anidamiento de ramales
– Un ramal (Spur) puede conectar varios dispositivos
– 4 dispositivos por ramal (Spur)
– La cantidad de dispositivos en un ramal (Spur) reduce la distancia máxima del mismo ramal
Total de dispositivos
en el segmento
1
Dispositivo por
Spur
(m)
2
Dispositivo por
Spur
(m)
3
Dispositivo por
Spur
(m)
4
Dispositivo por
Spur
(m)
Longitud
Máxima
Total
(m)
1-12 120 90 60 20 1440
13-14 90 60 30 1 1260
15-16 60 30 1 1 1080
120m
90m
60m
20m
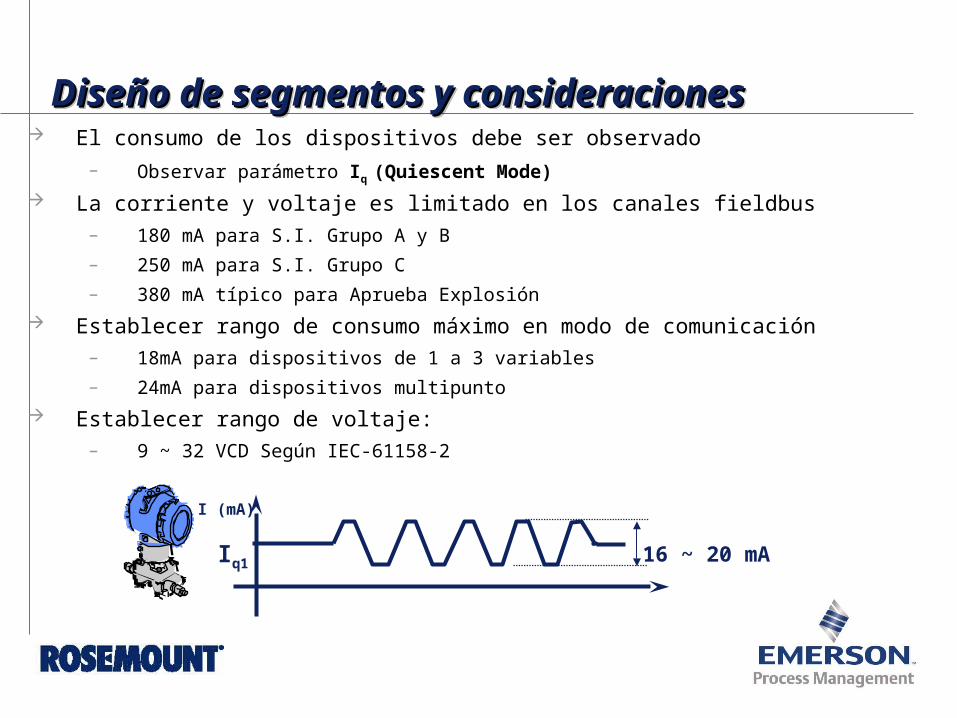
Diseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideraciones El consumo de los dispositivos debe ser observado
– Observar parámetro Iq (Quiescent Mode)
La corriente y voltaje es limitado en los canales fieldbus– 180 mA para S.I. Grupo A y B
– 250 mA para S.I. Grupo C
– 380 mA típico para Aprueba Explosión
Establecer rango de consumo máximo en modo de comunicación– 18mA para dispositivos de 1 a 3 variables
– 24mA para dispositivos multipunto
Establecer rango de voltaje:– 9 ~ 32 VCD Según IEC-61158-2
I (mA)
Iq1 16 ~ 20 mA
Diseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideraciones Dispositivos de 4 hilos también consumen
energía del bus en Quiescent Mode (transmisión)
– Establecer limite 20 mA Max.
Corriente Total = Iq1 + Iq2 + Iq3 + ……... Iqn
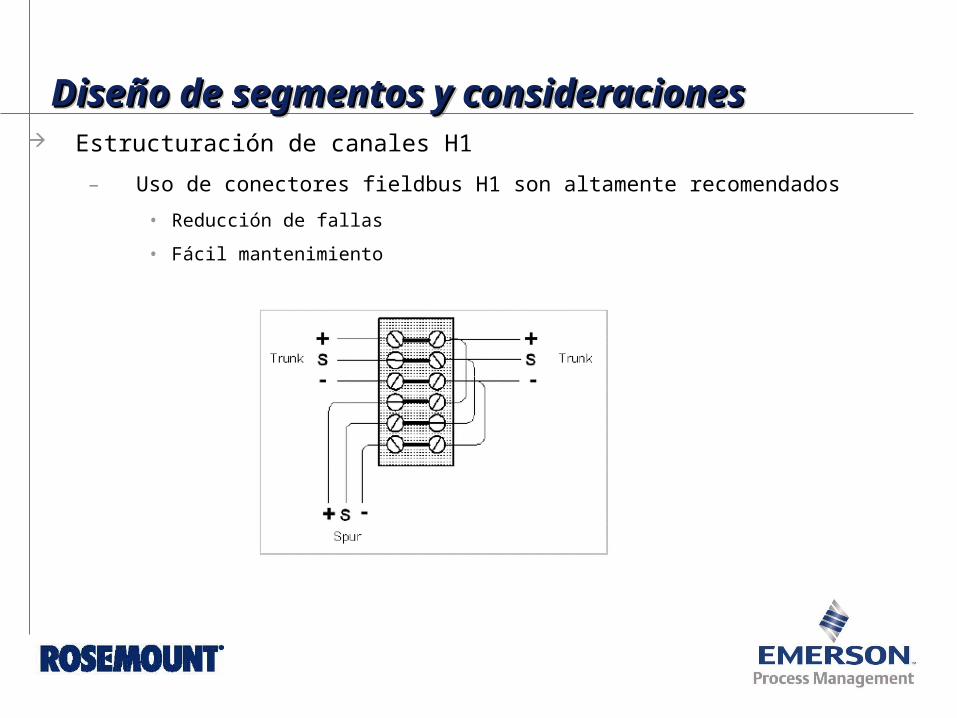
Diseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideraciones Estructuración de canales H1
– Uso de conectores fieldbus H1 son altamente recomendados
• Reducción de fallas
• Fácil mantenimiento
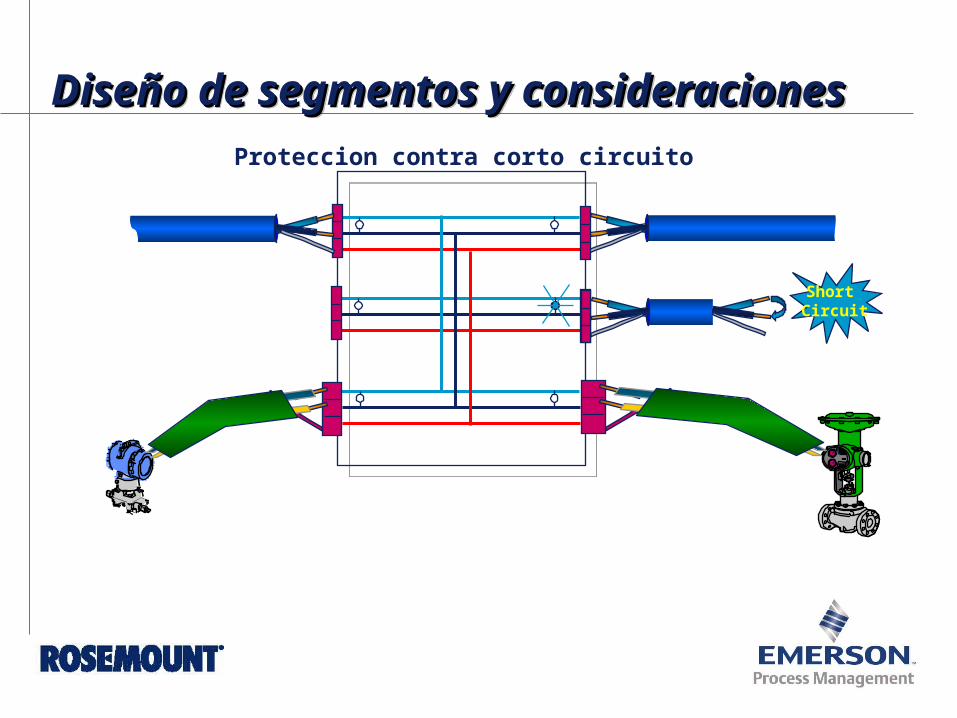
Short Circuit
Proteccion contra corto circuito
Diseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideraciones
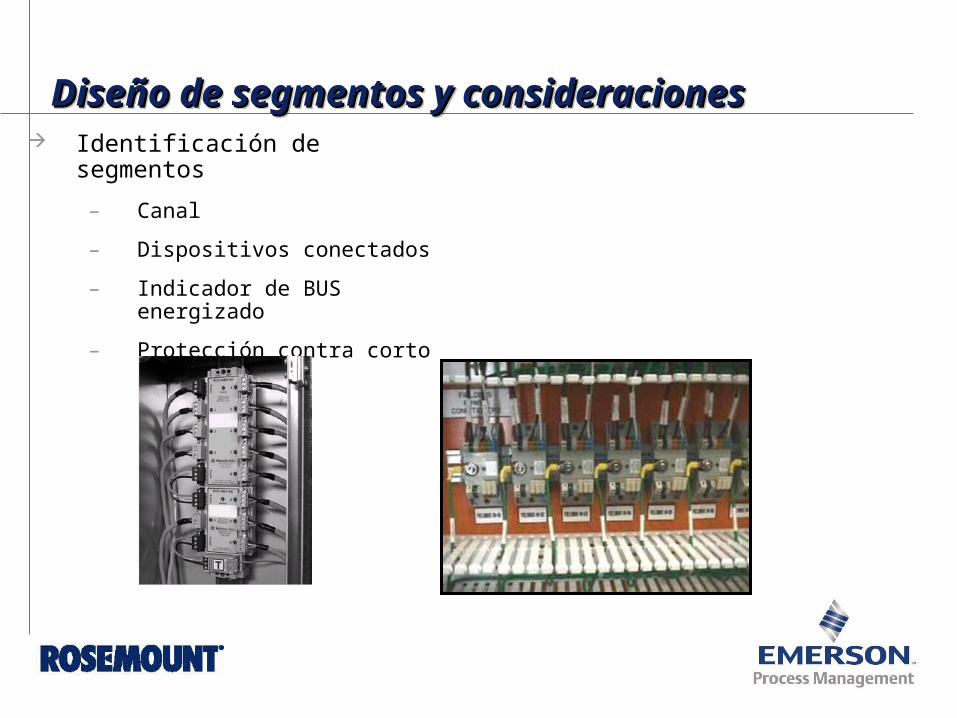
Diseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideraciones Identificación de segmentos
– Canal
– Dispositivos conectados
– Indicador de BUS energizado
– Protección contra corto circuito
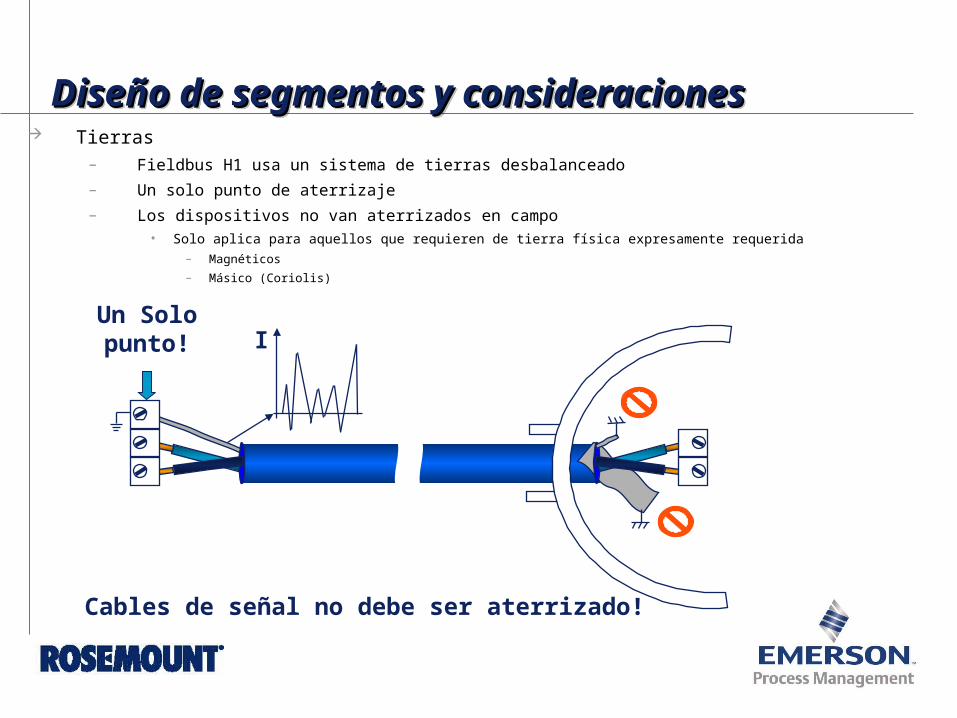
Diseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideraciones Tierras
– Fieldbus H1 usa un sistema de tierras desbalanceado
– Un solo punto de aterrizaje
– Los dispositivos no van aterrizados en campo• Solo aplica para aquellos que requieren de tierra física expresamente requerida
– Magnéticos
– Másico (Coriolis)
I
Cables de señal no debe ser aterrizado!
Un Solopunto!
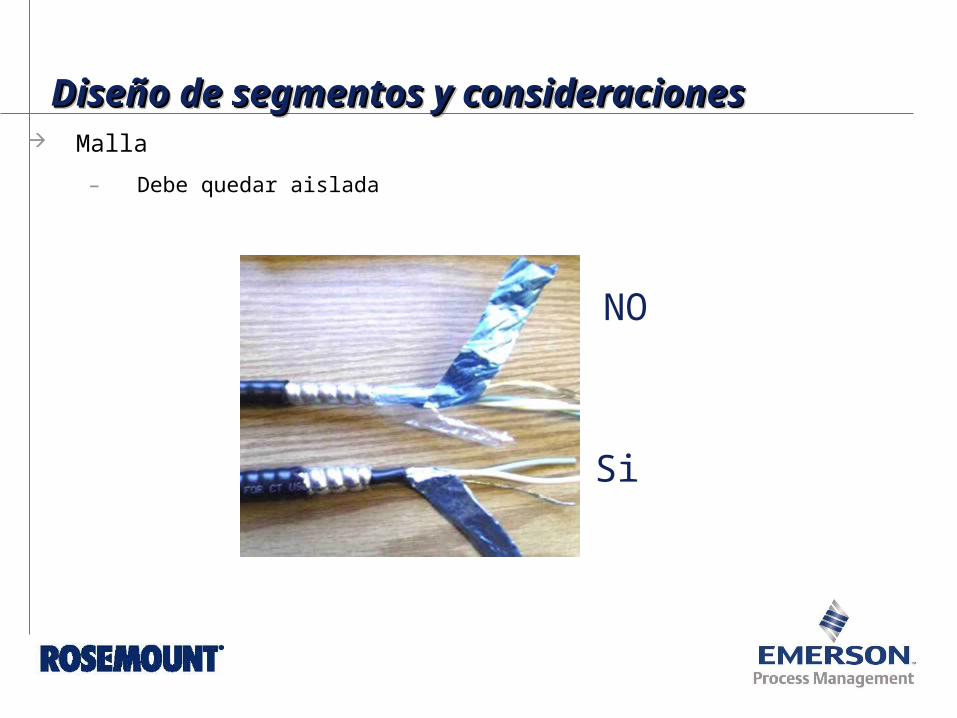
Diseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideraciones Malla
– Debe quedar aislada
Si
NO
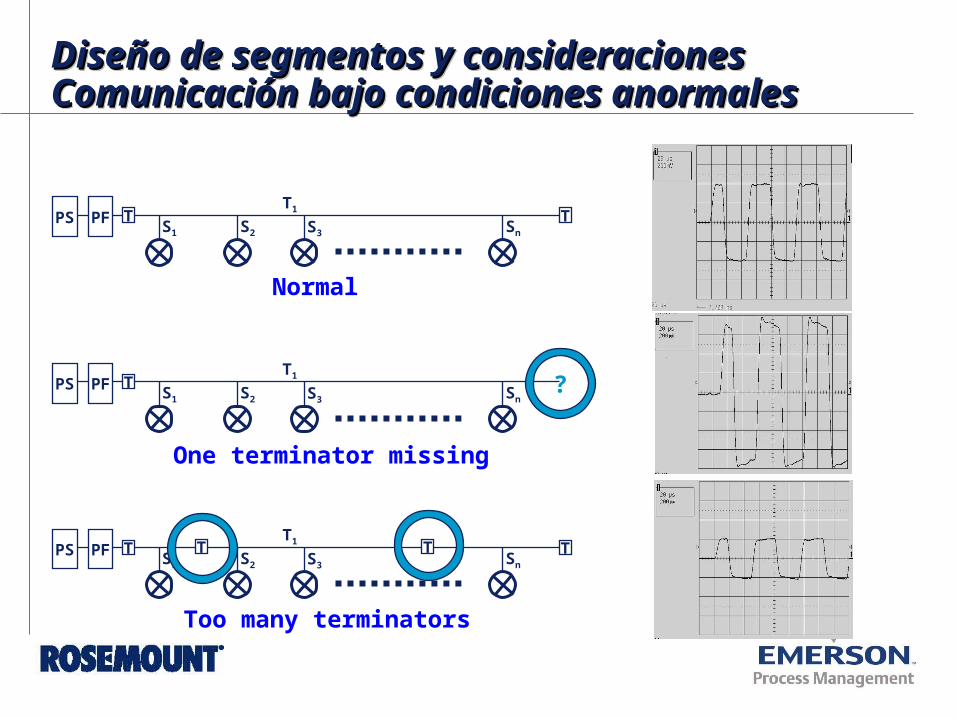
T TT1
S1 S2 S3 Sn
PFPS
Normal
TT1
S1 S2 S3 Sn
PFPS ?
One terminator missing
T TT1
S1 S2 S3 Sn
PFPS
Too many terminators
T T
Diseño de segmentos y consideracionesDiseño de segmentos y consideracionesComunicación bajo condiciones anormalesComunicación bajo condiciones anormalesDiseño de segmentos y consideracionesDiseño de segmentos y consideracionesComunicación bajo condiciones anormalesComunicación bajo condiciones anormales
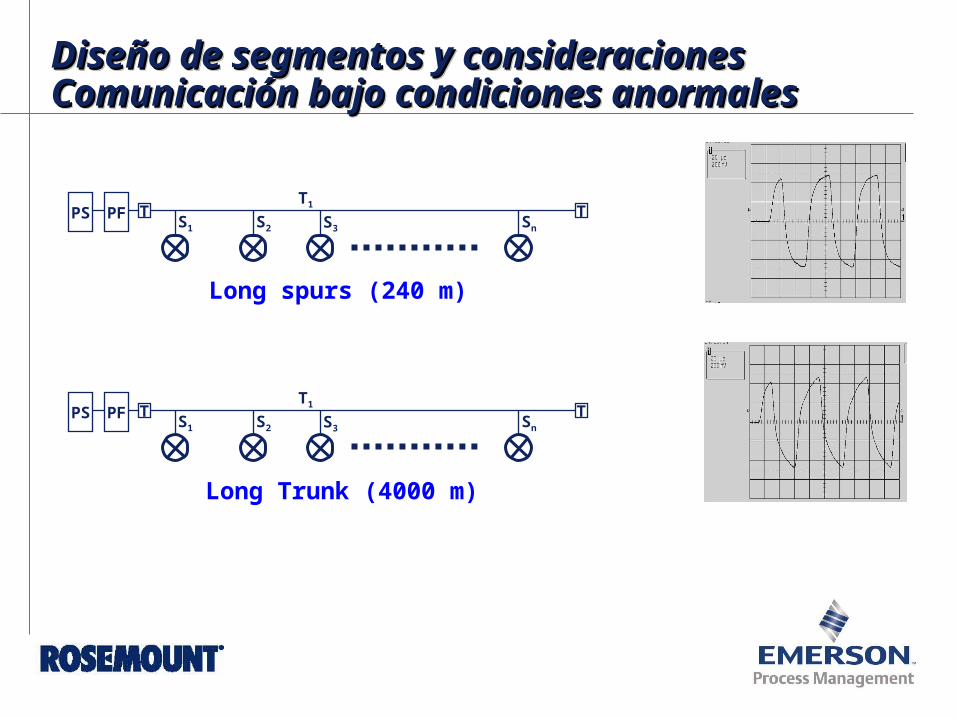
T TT1
S1 S2 S3 Sn
PFPS
Long spurs (240 m)
T TT1
S1 S2 S3 Sn
PFPS
Long Trunk (4000 m)
Diseño de segmentos y consideracionesDiseño de segmentos y consideracionesComunicación bajo condiciones anormalesComunicación bajo condiciones anormalesDiseño de segmentos y consideracionesDiseño de segmentos y consideracionesComunicación bajo condiciones anormalesComunicación bajo condiciones anormales
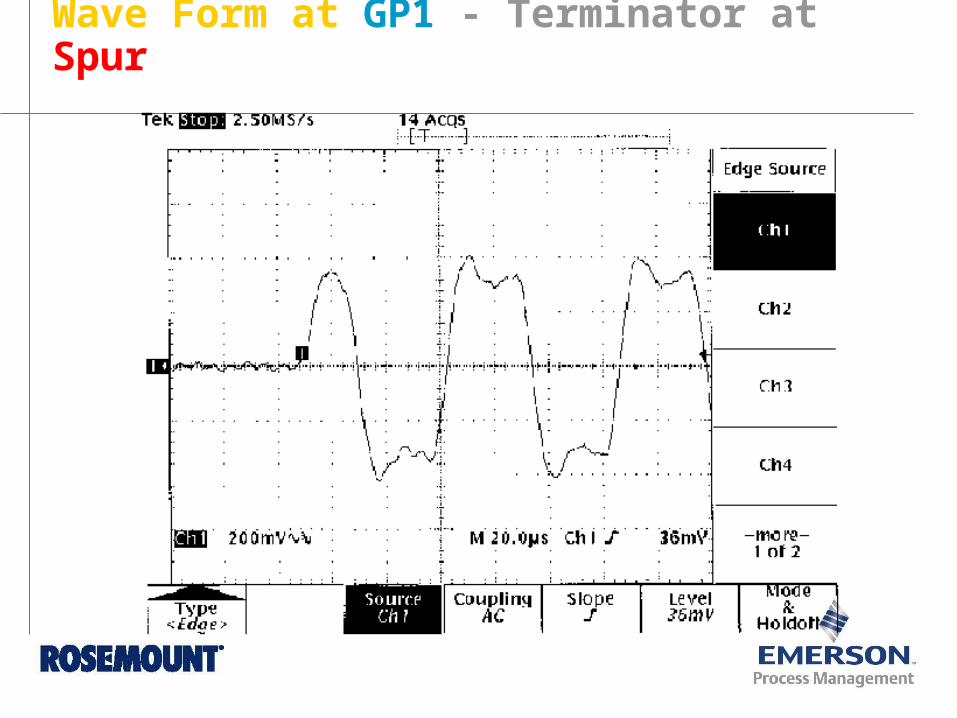
Wave Form at GP1 - Terminator at Spur
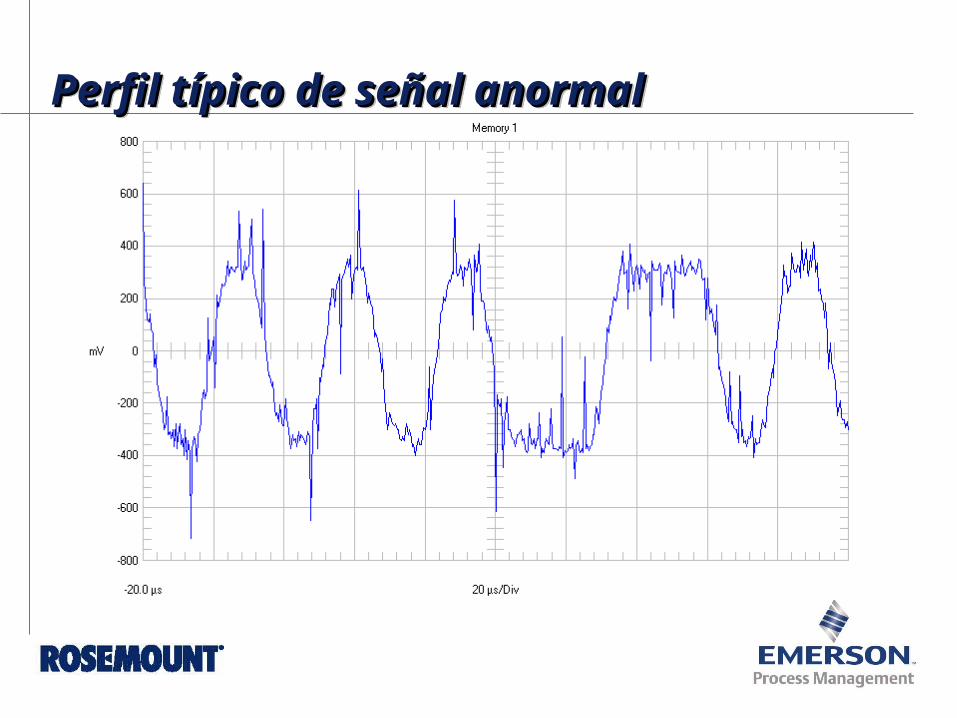
Perfil típico de señal anormalPerfil típico de señal anormalPerfil típico de señal anormalPerfil típico de señal anormal
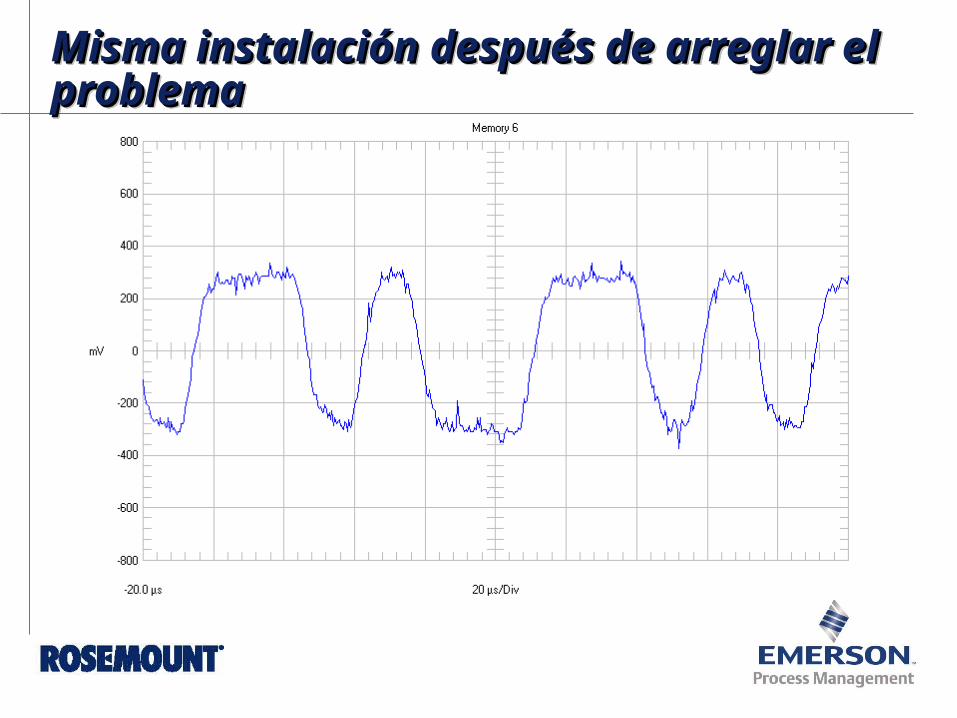
Misma instalación después de arreglar el Misma instalación después de arreglar el problemaproblemaMisma instalación después de arreglar el Misma instalación después de arreglar el problemaproblema
Diseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideracionesDiseño de segmentos y consideraciones Información técnica para calculo y diseño disponibles en guía de cableado
por Relcom Inc./MTL
Dispositivos de campo y requerimientos Dispositivos de campo y requerimientos básicosbásicosDispositivos de campo y requerimientos Dispositivos de campo y requerimientos básicosbásicos
No todos los dispositivos fieldbus son iguales.
– Diferencias por tipo de función en el proceso
– Fabricante
Registro ante Fieldbus Foundation solo se refiere a la interoperabilidad entre los bloques de funciones soportados en los dispositivos, pero no establece las capacidades del dispositivo.
Necesario establecer las capacidades de los dispositivos de acuerdo con:
– Función
– Jerarquía
Dos tipos
– 2 hilos alimentados por canal H1
– 4 hilos alimentados con fuente externa.

Clases de Dispositivos FoundationClases de Dispositivos FoundationTMTM Fieldbus según funciónFieldbus según funciónClases de Dispositivos FoundationClases de Dispositivos FoundationTMTM Fieldbus según funciónFieldbus según función
Dispositivos para:
– Medición
• Continua
• Discreta
– Elemento final de control
• Modulante
• Discreto
– Indicación
Dispositivos de mediciónDispositivos de mediciónDispositivos de mediciónDispositivos de medición Variables continuas
– Presión
– Temperatura
– Flujo
– Nivel
– Analítica (pH, O2, Conductividad, ORP)
– Otros
Diseñados para proporcionar una o mas variables de proceso
PVFlujo
MasaVolumen
PT
Densidad
Dispositivos de mediciónDispositivos de mediciónDispositivos de mediciónDispositivos de medición Variables discretas
– On/Off
– Verdadero/Falso
– Abierto/Cerrado
Diseñados para proporcional una o mas variables
Solo dos posibles valores (0,1)
– Interruptores
– Slectoras
– Botoneras de arranque y paro

Dispositivos Elementos Finales de ControlDispositivos Elementos Finales de ControlDispositivos Elementos Finales de ControlDispositivos Elementos Finales de Control Elementos modulantes
– Posicionador
• Válvula deslizante
• Válvula rotativa
– Requerido para lazos de control avanzado, provee retroalimentación de su posición.
– Convertidor neumático
• Salida 3-15 Psig (0-30 Psig)
• Recomendado como accesorio de posicionadores neumáticos existentes.
Dispositivos Elementos Finales de ControlDispositivos Elementos Finales de ControlDispositivos Elementos Finales de ControlDispositivos Elementos Finales de Control Elementos discretos
– Posicionador ¼ de vuelta
• Electro-neumático
• Eléctrico
– Convertidor lógico
• Contacto seco
• Contacto tipo relevador
Dispositivos de campo y requerimientos Dispositivos de campo y requerimientos básicosbásicosDispositivos de campo y requerimientos Dispositivos de campo y requerimientos básicosbásicos
Desempeño
Funcionalidad
Consumo energía
Recursos de comunicación
Diagnósticos
Instanciabilidad
Actualización de firmware
Soporte de métodos
L.A.S.
Polaridad
Foundation fieldbusComunicacionFuncionalidadDiagnosticosVelocidad de procesamientoConsumo energia
ExactitudEstabilidadRepeteabilidadVelocidad sensorResistencia

Dispositivos de campo y requerimientos Dispositivos de campo y requerimientos básicosbásicosDispositivos de campo y requerimientos Dispositivos de campo y requerimientos básicosbásicos
Clasificar tres grupos
– Monitoreo
– Control
– Seguridad (No S.I.S.)
Dispositivos de medición deben contar con capacidad L.A.S. como estándar
– Respaldo de L.A.S. en canal.
Polaridad
– Dispositivos con insensibilidad a la polaridad serán preferidos para reducir riesgos de fallas por conexión invertida.
– Dispositivos con protección a polaridad invertida serán preferidos sobre los que no cuenten con protección alguna
Montaje directo
– Eliminación de tomas de impulso cuando el proceso lo permita y exista elemento primario de medición auto soportado.

Dispositivos de campo y requerimientos Dispositivos de campo y requerimientos básicosbásicosDispositivos de campo y requerimientos Dispositivos de campo y requerimientos básicosbásicos
Dispositivos de monitoreo
– Monitoreo general
• Exactitud 0.075% Span calibrado
• Estabilidad: 2 a 5 años
• Indicador local LCD configurable
– Monitoreo con alarmas
• Exactitud 0.055% Span calibrado
• Estabilidad: 2 a 5 años
• Indicador Local configurable
– Transferencia en custodia
• Exactitud: 0.025% Span Calibrado
• Estabilidad: 5 a 10 Años
• Indicador Local configurable de 3 variables mínimo
– Bloques de función mínimos:
• AI mejorado con salida OU_D de alarma
• INT, Integrador
• ISEL, Selector de entrada
• ARTH, Aritmético general
• DISPLAY_Transducer
– No existe bloque de función para el indicador del dispositivo (DISPLAY) fabricantes pueden ofrecer Bloque transductor)
Dispositivos de campo y requerimientos Dispositivos de campo y requerimientos básicosbásicosDispositivos de campo y requerimientos Dispositivos de campo y requerimientos básicosbásicos
Dispositivos de control
– Control Presión
• Exactitud: 0.025% Span Calibrado
• Estabilidad: 5 a 10 Años
• Indicador Local configurable 3 variables minimo (Pv, Sp, Mv)
– Bloques de función mínimos:
• AI mejorado con salida OU_D de alarma
• CHAR, Caracterizador
• OSEL, Selector salida
• SPLITTER, Rango dividido
• ARTH, Aritmético general
• PID, Control regulatorio
– Preferir PID con auto sintonía
• DISPLAY_Transducer
– No existe bloque de función para el indicador del dispositivo (DISPLAY) fabricantes pueden ofrecer Bloque transductor)
Dispositivos de campo y requerimientos Dispositivos de campo y requerimientos básicosbásicosDispositivos de campo y requerimientos Dispositivos de campo y requerimientos básicosbásicos
Dispositivos de control
– Control Flujo
• Exactitud: 0.04 % lectura
• Estabilidad: 5 a 10 Años
• Indicador Local configurable 3 variables minimo (Pv, Sp, Mv)
– Bloques de función mínimos:
• AI mejorado con salida OUT_D de alarma
• CHAR, Caracterizador
• OSEL, Selector salida
• SPLITTER, Rango dividido
• ARTH, Aritmético general
• INTEG, Totalizador con Batch
• PID, Control regulatorio
– Preferir PID con auto sintonía
• DISPLAY_Transducer
– No existe bloque de función para el indicador del dispositivo (DISPLAY) fabricantes pueden ofrecer Bloque transductor)
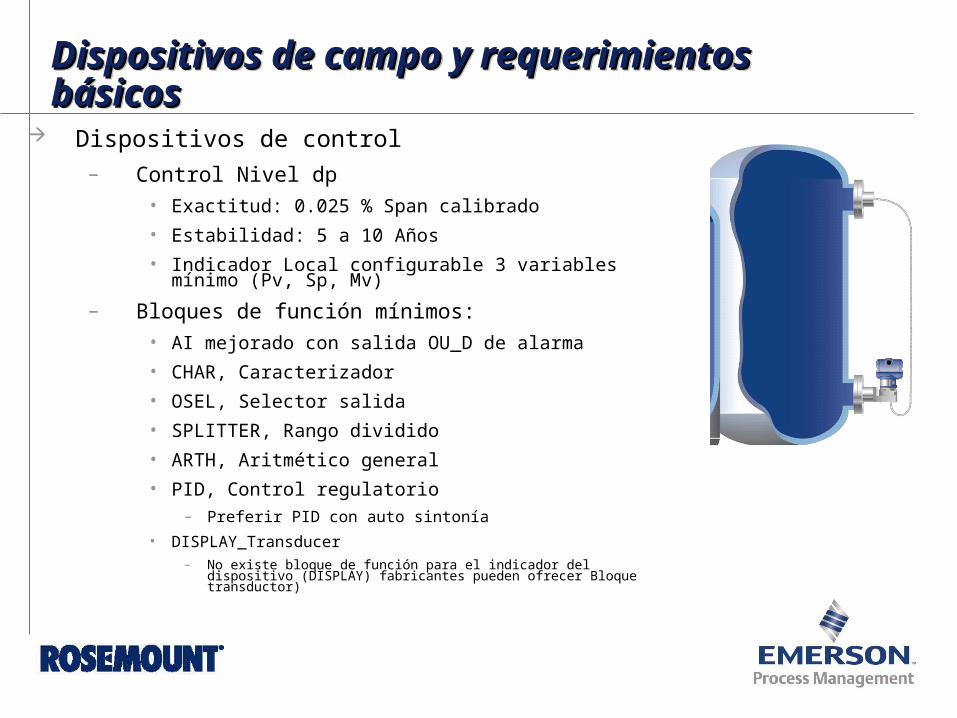
Dispositivos de campo y requerimientos Dispositivos de campo y requerimientos básicosbásicosDispositivos de campo y requerimientos Dispositivos de campo y requerimientos básicosbásicos
Dispositivos de control– Control Nivel dp
• Exactitud: 0.025 % Span calibrado
• Estabilidad: 5 a 10 Años
• Indicador Local configurable 3 variables mínimo (Pv, Sp, Mv)
– Bloques de función mínimos:• AI mejorado con salida OU_D de alarma
• CHAR, Caracterizador
• OSEL, Selector salida
• SPLITTER, Rango dividido
• ARTH, Aritmético general
• PID, Control regulatorio– Preferir PID con auto sintonía
• DISPLAY_Transducer– No existe bloque de función para el indicador del dispositivo (DISPLAY)
fabricantes pueden ofrecer Bloque transductor)
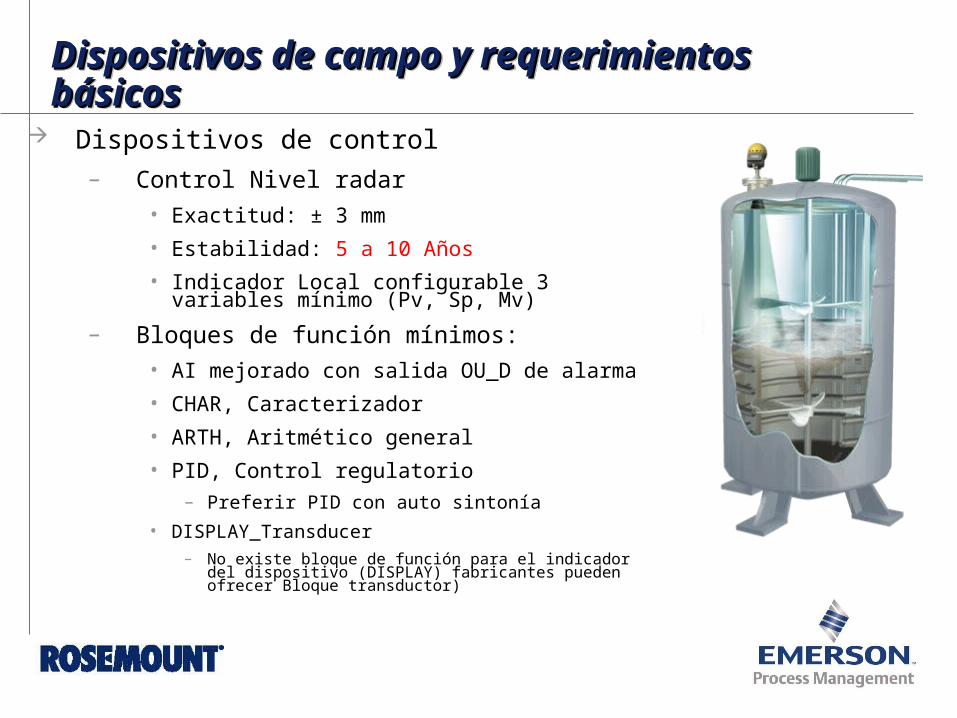
Dispositivos de campo y requerimientos Dispositivos de campo y requerimientos básicosbásicosDispositivos de campo y requerimientos Dispositivos de campo y requerimientos básicosbásicos
Dispositivos de control
– Control Nivel radar• Exactitud: ± 3 mm
• Estabilidad: 5 a 10 Años
• Indicador Local configurable 3 variables mínimo (Pv, Sp, Mv)
– Bloques de función mínimos:• AI mejorado con salida OU_D de alarma
• CHAR, Caracterizador
• ARTH, Aritmético general
• PID, Control regulatorio– Preferir PID con auto sintonía
• DISPLAY_Transducer– No existe bloque de función para el indicador del dispositivo
(DISPLAY) fabricantes pueden ofrecer Bloque transductor)
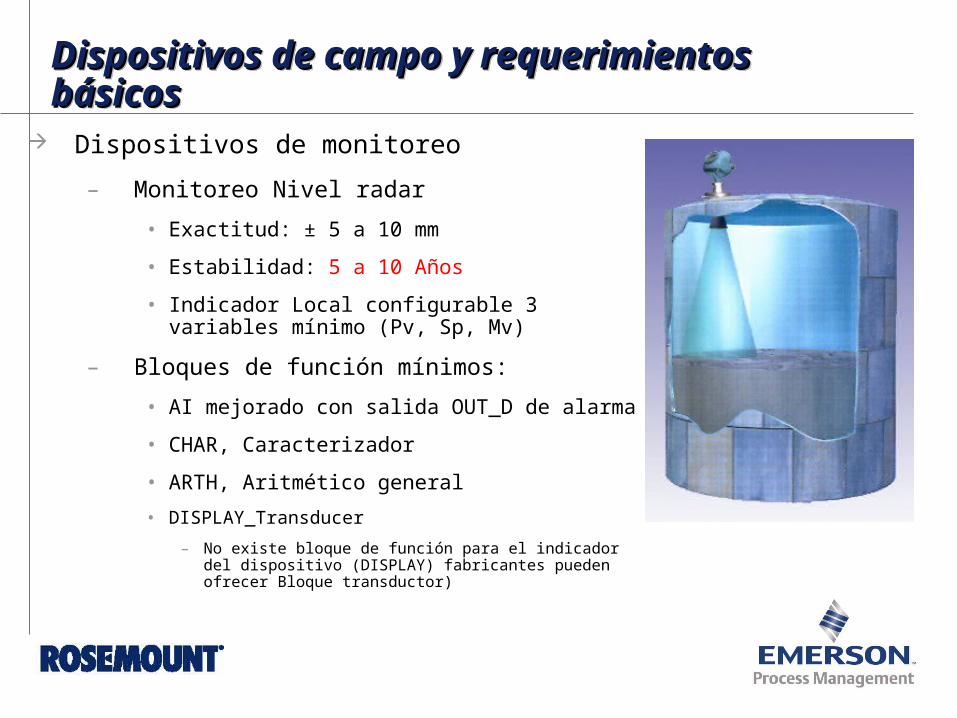
Dispositivos de campo y requerimientos Dispositivos de campo y requerimientos básicosbásicosDispositivos de campo y requerimientos Dispositivos de campo y requerimientos básicosbásicos
Dispositivos de monitoreo
– Monitoreo Nivel radar
• Exactitud: ± 5 a 10 mm
• Estabilidad: 5 a 10 Años
• Indicador Local configurable 3 variables mínimo (Pv, Sp, Mv)
– Bloques de función mínimos:
• AI mejorado con salida OUT_D de alarma
• CHAR, Caracterizador
• ARTH, Aritmético general
• DISPLAY_Transducer
– No existe bloque de función para el indicador del dispositivo (DISPLAY) fabricantes pueden ofrecer Bloque transductor)
Dispositivos FoundationDispositivos FoundationTMTM Fieldbus FieldbusBloques de funciónBloques de funciónDispositivos FoundationDispositivos FoundationTMTM Fieldbus FieldbusBloques de funciónBloques de función
Dispositivos de monitoreo
– Monitoreo Temperatura
• Exactitud: ± 0.05
• Estabilidad: 12 meses
– Bloques de función mínimos:
• AI mejorado con salida OUT_D de alarma
• MAI, Entrada analógica múltiple
• ISEL, Selector de entrada
Dispositivos FoundationDispositivos FoundationTMTM Fieldbus FieldbusBloques de funciónBloques de funciónDispositivos FoundationDispositivos FoundationTMTM Fieldbus FieldbusBloques de funciónBloques de función
Dispositivos de control
– Control Temperatura
• Exactitud: ± 1oC
• Estabilidad: 2 a 5 años
– Bloques de función mínimos:
• AI mejorado con salida OUT_D de alarma
• PID, control regulatorio
– PID con auto-sintonía es altamente recomendado
• ISEL, Selector de entrada
• OSEL, Selector de salida
• CHAR, Caracterizador
Dispositivos FoundationDispositivos FoundationTMTM Fieldbus FieldbusBloques de funciónBloques de funciónDispositivos FoundationDispositivos FoundationTMTM Fieldbus FieldbusBloques de funciónBloques de función
Dispositivos de indicación
– Básicos• Resource block
• Transducer block (segun cantidad de variables)
• PID block
• Display Transducer block
– Recomendados• Input Selector Block
• Arithmetical Block
• Integrator Block
• Signal Characterizer Block
Dispositivos FoundationDispositivos FoundationTMTM Fieldbus FieldbusBloques de funciónBloques de funciónDispositivos FoundationDispositivos FoundationTMTM Fieldbus FieldbusBloques de funciónBloques de función
Válvulas de control
– Básicos
• Resource block
• Transducer block (segun cantidad de variables)
• Analog Output block
• PID Block
• Output Splitter block
– Recomendados
• Input Selector Block
• Analog input (air supply)
• Discrete Input Block
• Discrete Output block
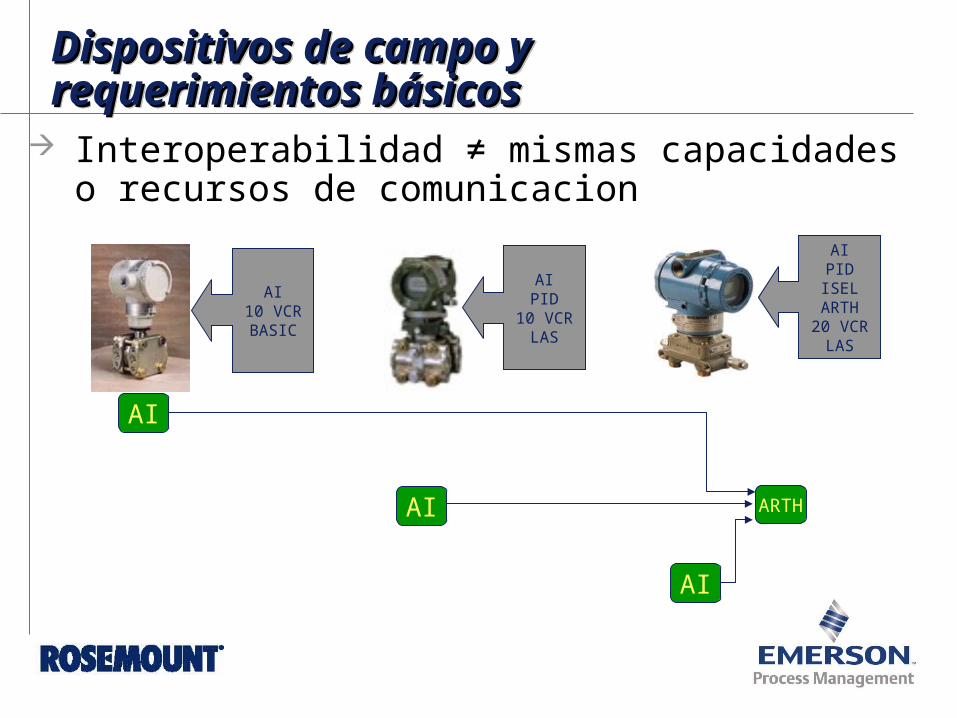
Interoperabilidad ≠ mismas capacidades o recursos de comunicacion
Dispositivos de campo y Dispositivos de campo y requerimientos básicosrequerimientos básicosDispositivos de campo y Dispositivos de campo y requerimientos básicosrequerimientos básicos
AI10 VCRBASIC
AIPID
10 VCRLAS
AIPIDISELARTH
20 VCRLAS
AI
AI
AI
ARTH
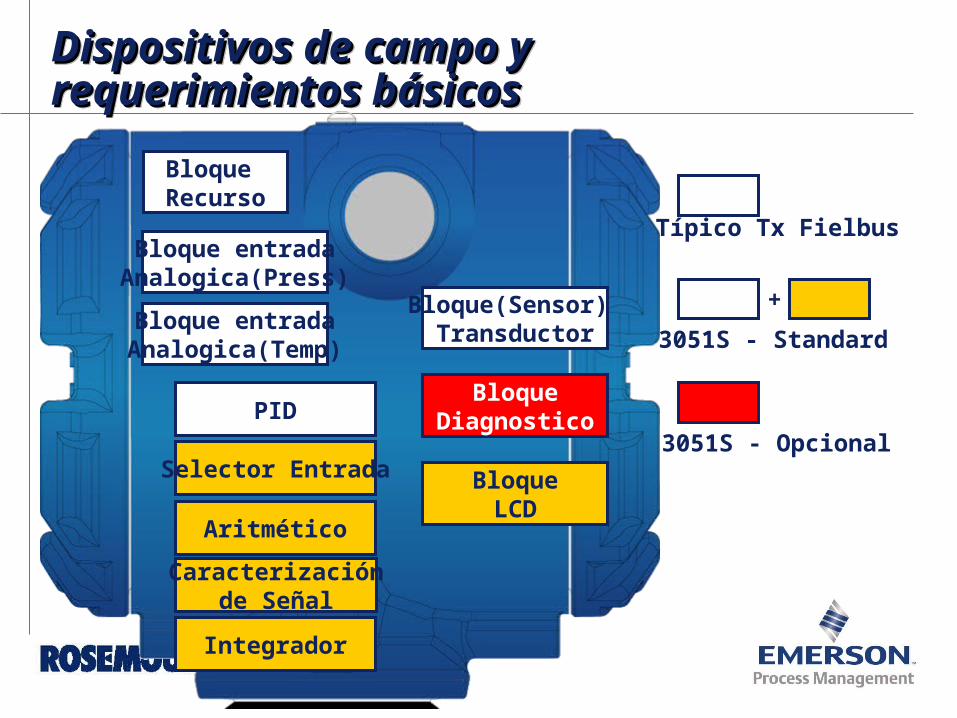
Bloque Recurso
Bloque entradaAnalogica(Press)
Bloque entradaAnalogica(Temp)
Bloque(Sensor) Transductor
BloqueDiagnostico
BloqueLCD
PID
Aritmético
Selector Entrada
Integrador
Caracterizaciónde Señal
Típico Tx Fielbus
3051S - Standard
+
3051S - Opcional
Dispositivos de campo y Dispositivos de campo y requerimientos básicosrequerimientos básicosDispositivos de campo y Dispositivos de campo y requerimientos básicosrequerimientos básicos
Dispositivos FoundationDispositivos FoundationTMTM Fieldbus FieldbusDiagnosticosDiagnosticosDispositivos FoundationDispositivos FoundationTMTM Fieldbus FieldbusDiagnosticosDiagnosticos
Diagnósticos avanzados en dispositivos de control y seguridad
– Transmisores
– Válvulas de control
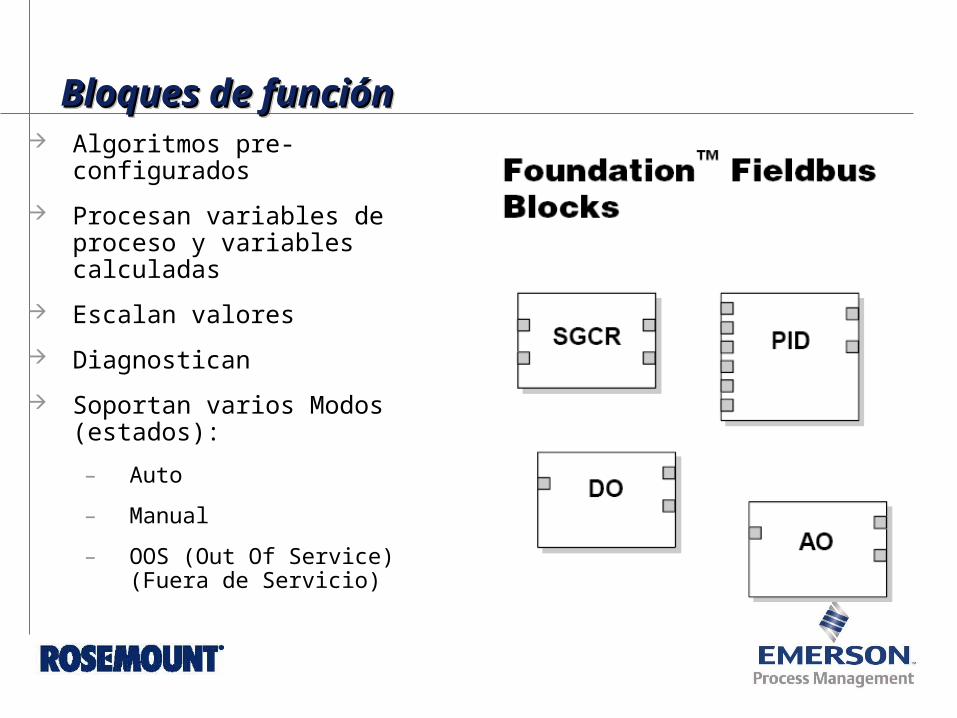
Bloques de funciónBloques de función Bloques de funciónBloques de función Algoritmos pre-configurados
Procesan variables de proceso y variables calculadas
Escalan valores
Diagnostican
Soportan varios Modos (estados):
– Auto
– Manual
– OOS (Out Of Service) (Fuera de Servicio)
Bloques de funciónBloques de función Bloques de funciónBloques de función Modo AUTO (Automático)
– El bloque de función realiza su algoritmo en forma automática:
• Medición
• Control
• Selección
– El resultado es según su algoritmo y valor de las variables (siempre y cuando estén en buen estado)
Bloques de funciónBloques de función Bloques de funciónBloques de función Modo MAN (Manual)
– El bloque de función detiene su algoritmo.
– El resultado es según lo indicado por el operador vía estación de operación o interfase de comunicación
Bloques de funciónBloques de función Bloques de funciónBloques de función Modo OOS (Fuera Servicio)
– El bloque de función no ejecuta su algoritmo.
– El valor de salida es nulo “Null”
– Los Bloques de función asociados no procesan esta información
…ZZZZ
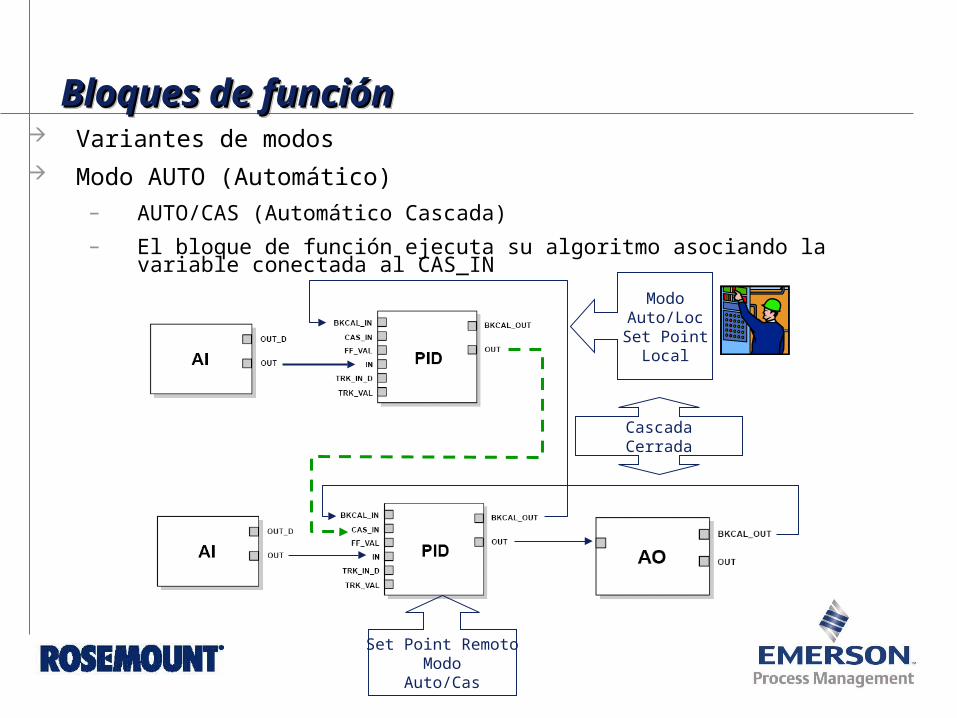
Bloques de funciónBloques de función Bloques de funciónBloques de función Variantes de modos Modo AUTO (Automático)
– AUTO/CAS (Automático Cascada)
– El bloque de función ejecuta su algoritmo asociando la variable conectada al CAS_IN
Set Point RemotoModo
Auto/Cas
ModoAuto/LocSet Point
Local
CascadaCerrada
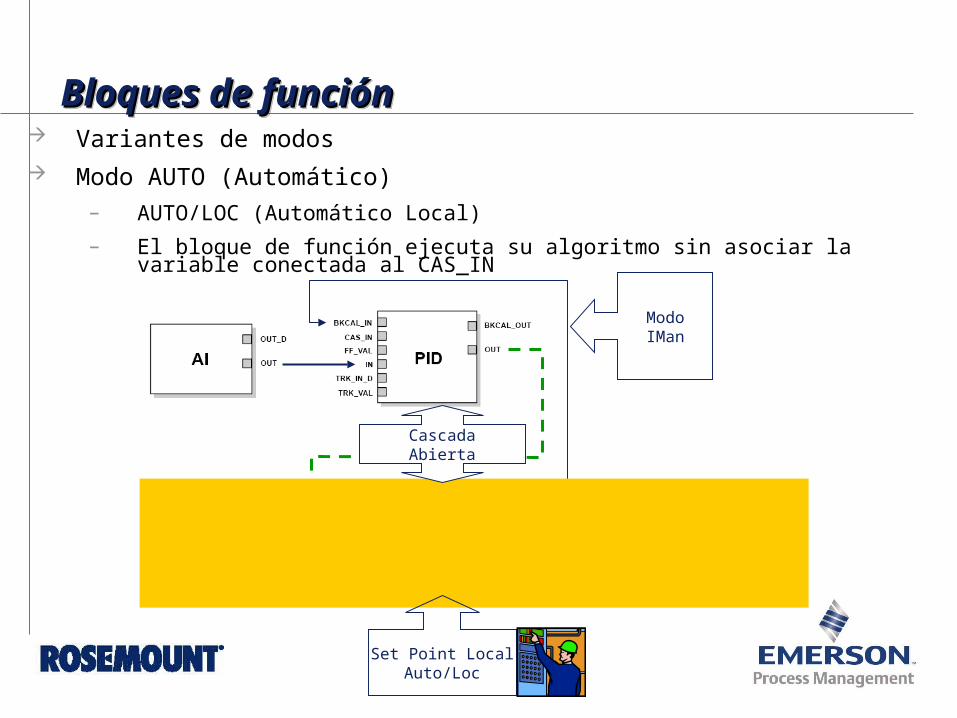
Bloques de funciónBloques de función Bloques de funciónBloques de función Variantes de modos Modo AUTO (Automático)
– AUTO/LOC (Automático Local)
– El bloque de función ejecuta su algoritmo sin asociar la variable conectada al CAS_IN
Set Point LocalAuto/Loc
ModoIMan
CascadaAbierta
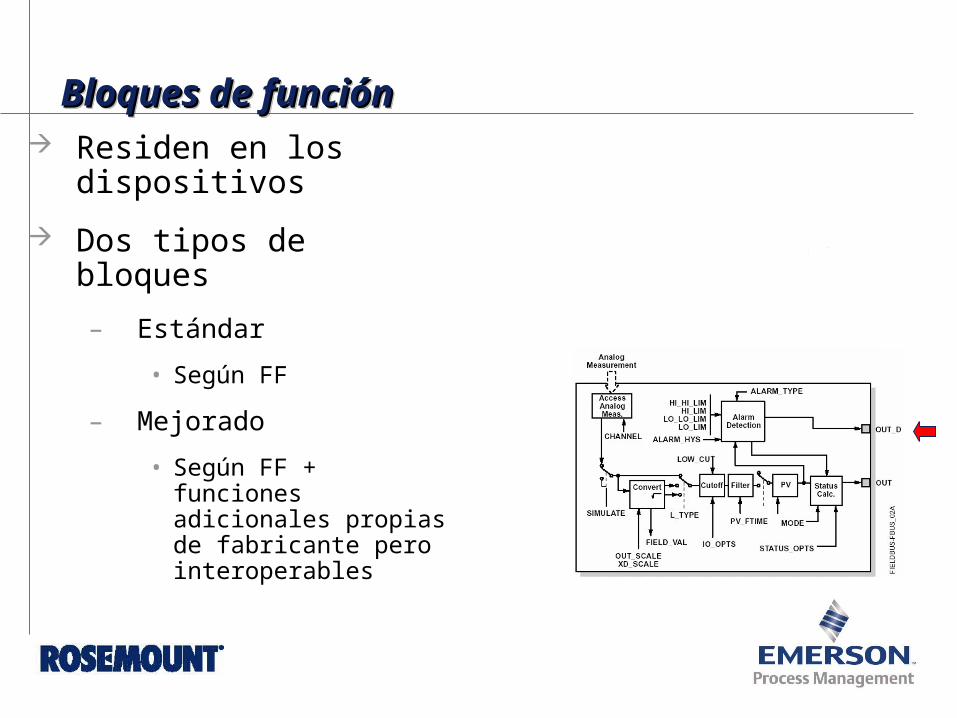
Bloques de funciónBloques de función Bloques de funciónBloques de función Residen en los
dispositivos
Dos tipos de bloques
– Estándar
• Según FF
– Mejorado
• Según FF + funciones adicionales propias de fabricante pero interoperables
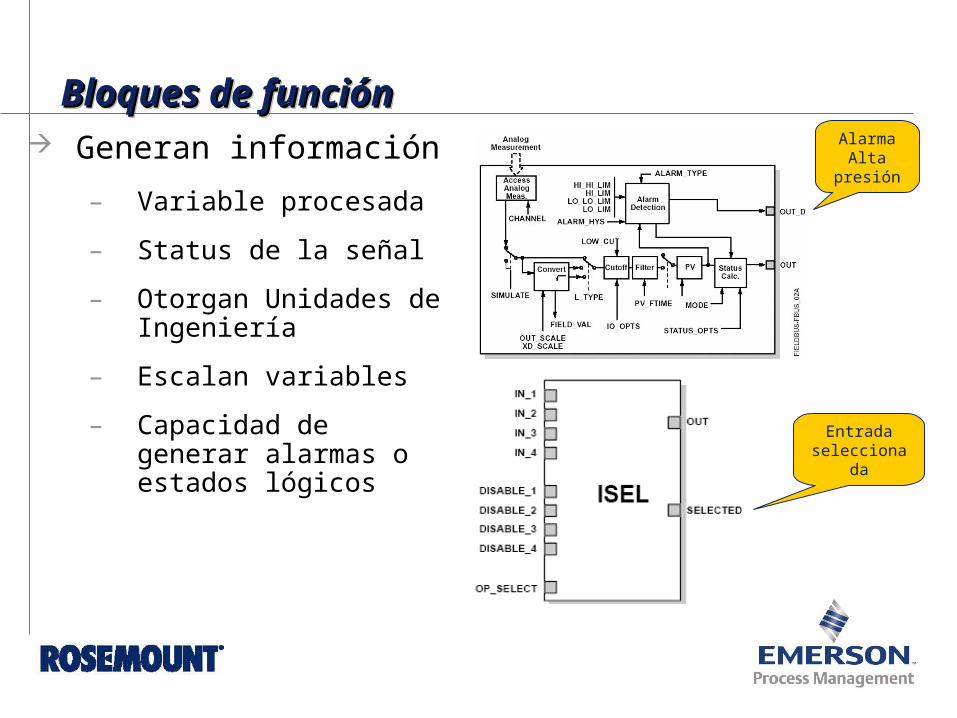
Bloques de funciónBloques de función Bloques de funciónBloques de función Generan información
– Variable procesada
– Status de la señal
– Otorgan Unidades de Ingeniería
– Escalan variables
– Capacidad de generar alarmas o estados lógicos
Alarma Alta
presión
Entradaseleccionada
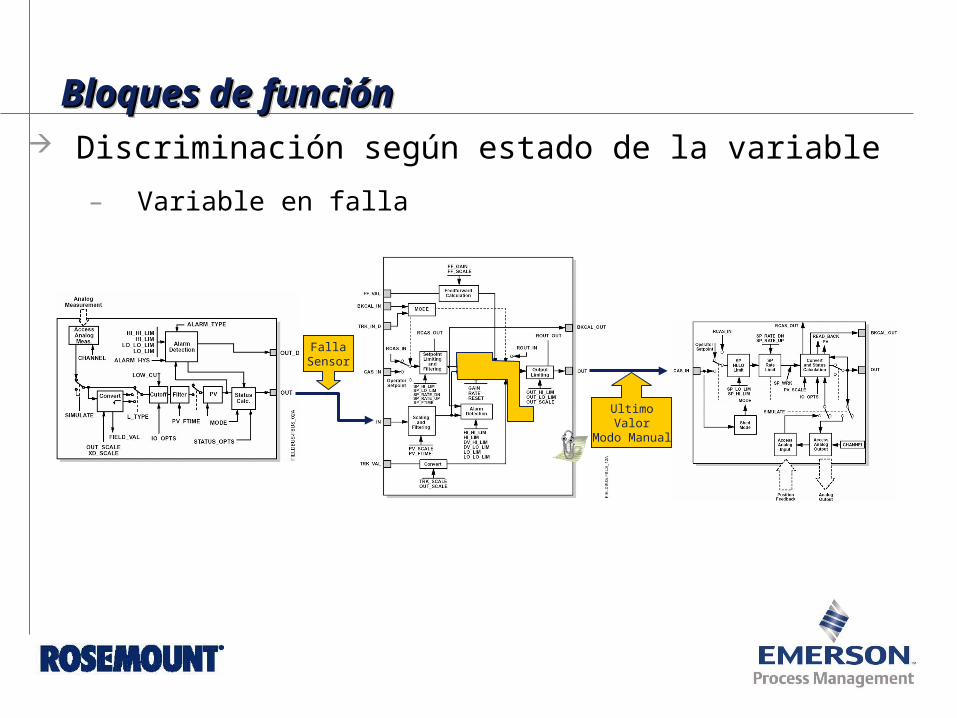
Bloques de funciónBloques de función Bloques de funciónBloques de función Discriminación según estado de la variable
– Variable en falla
FallaSensor
UltimoValor
Modo Manual
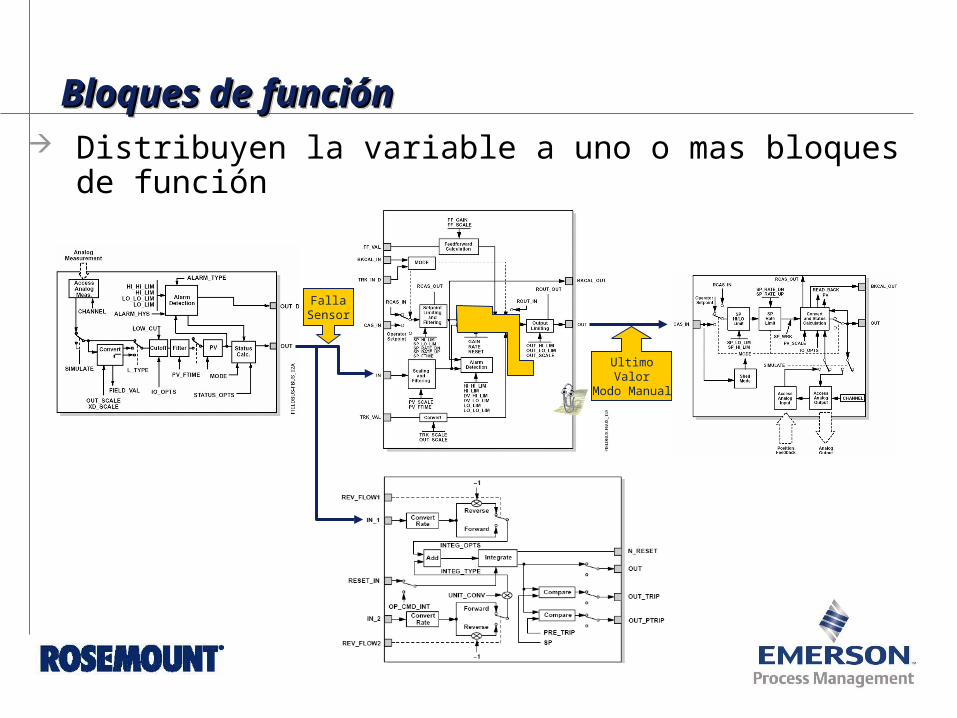
Bloques de funciónBloques de función Bloques de funciónBloques de función Distribuyen la variable a uno o mas bloques de función
FallaSensor
UltimoValor
Modo Manual
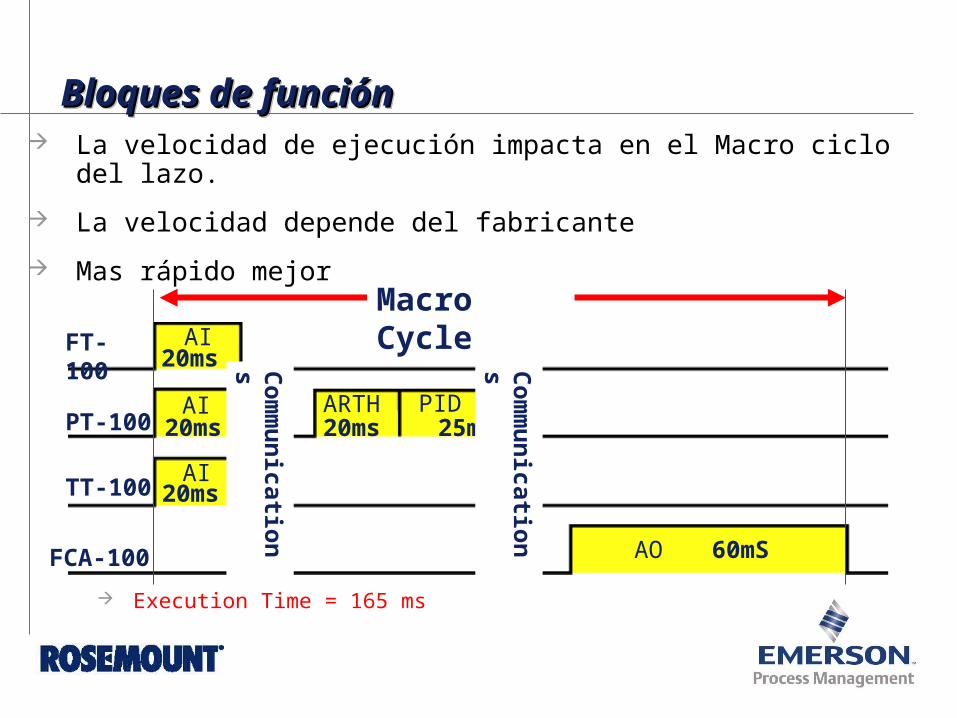
Bloques de funciónBloques de función Bloques de funciónBloques de función La velocidad de ejecución impacta en el Macro ciclo del lazo.
La velocidad depende del fabricante
Mas rápido mejor
FT-100
Macro Cycle
20ms
20ms 25ms
TT-100
PT-100
60mS
PID
Execution Time = 165 ms
20ms
20ms
AI
FCA-100
ARTH
AI
AO
AI
Co
mm
un
ication
s
Co
mm
un
ication
s
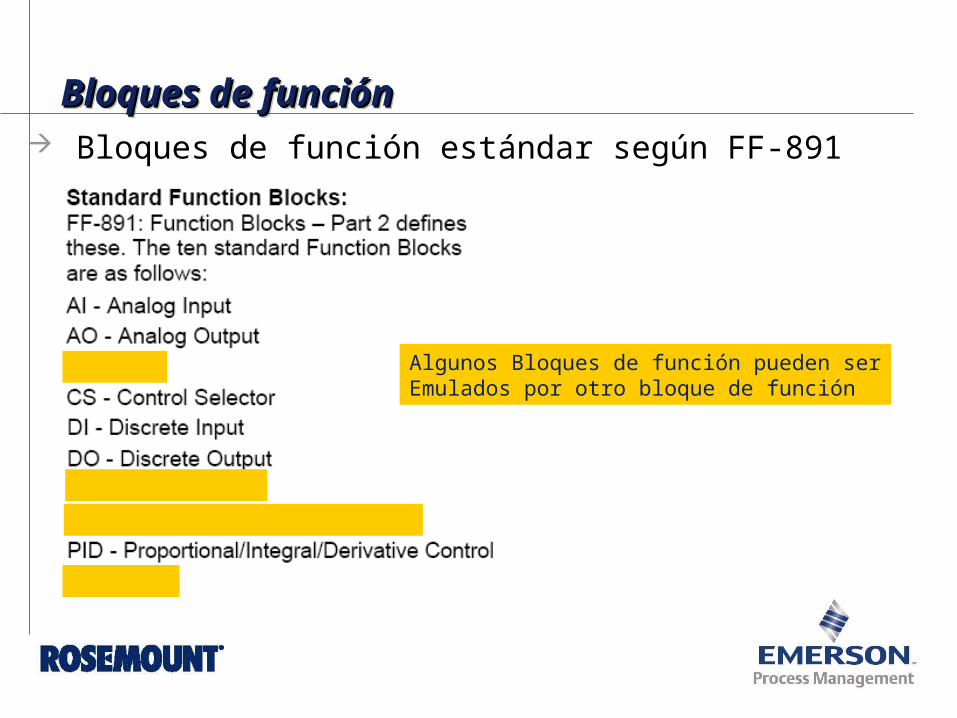
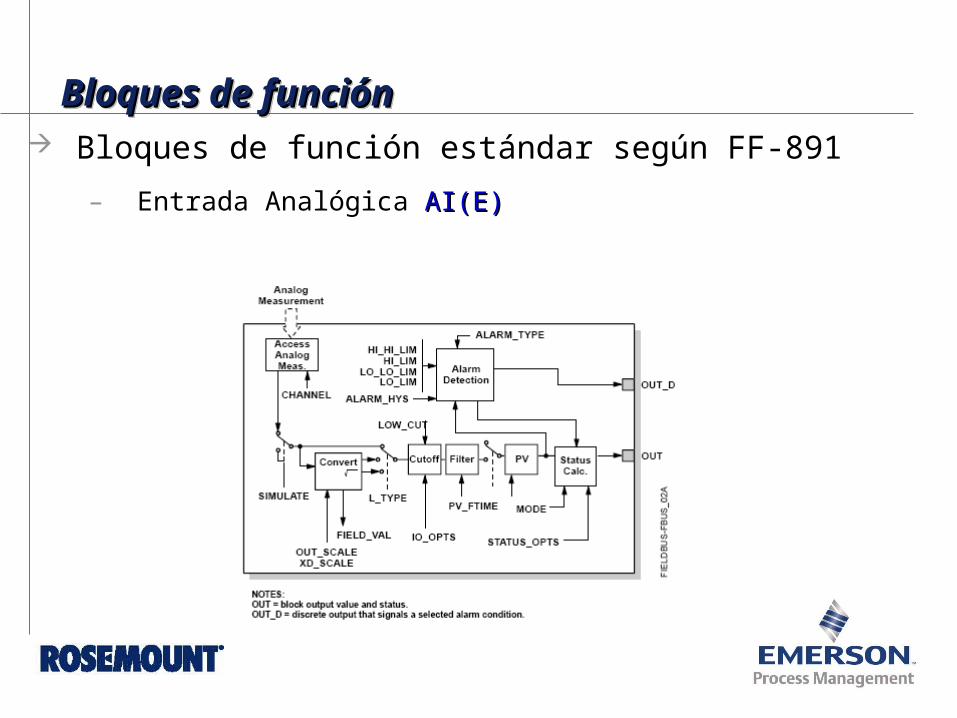
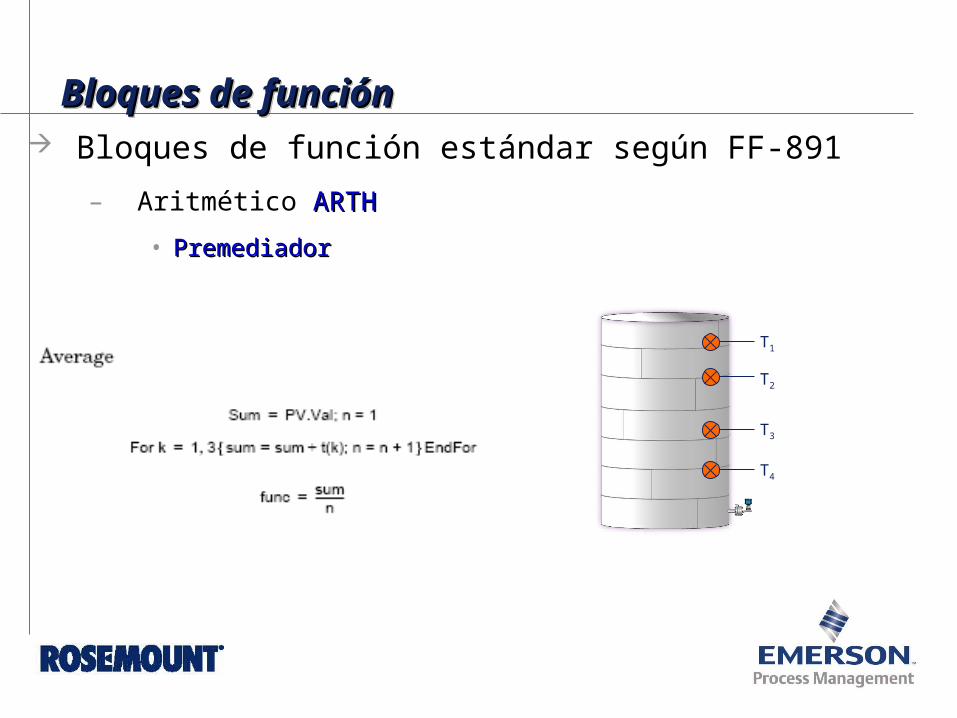
Bloques de funciónBloques de función Bloques de funciónBloques de función Bloques de función estándar según FF-891
Algunos Bloques de función pueden serEmulados por otro bloque de función
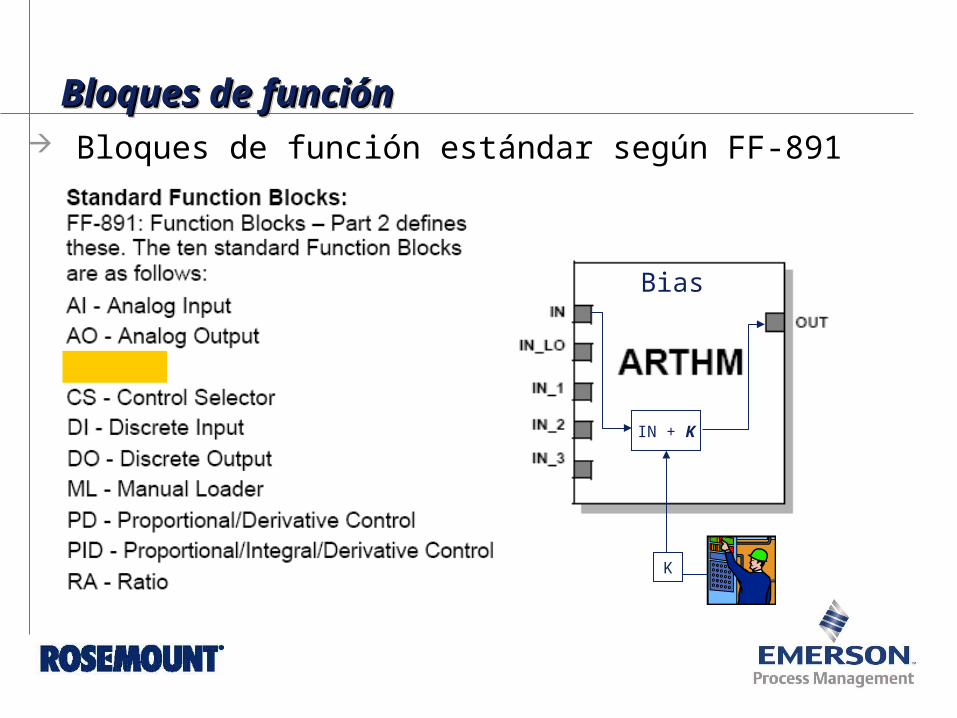
Bloques de funciónBloques de función Bloques de funciónBloques de función Bloques de función estándar según FF-891
Bias
IN + K
K
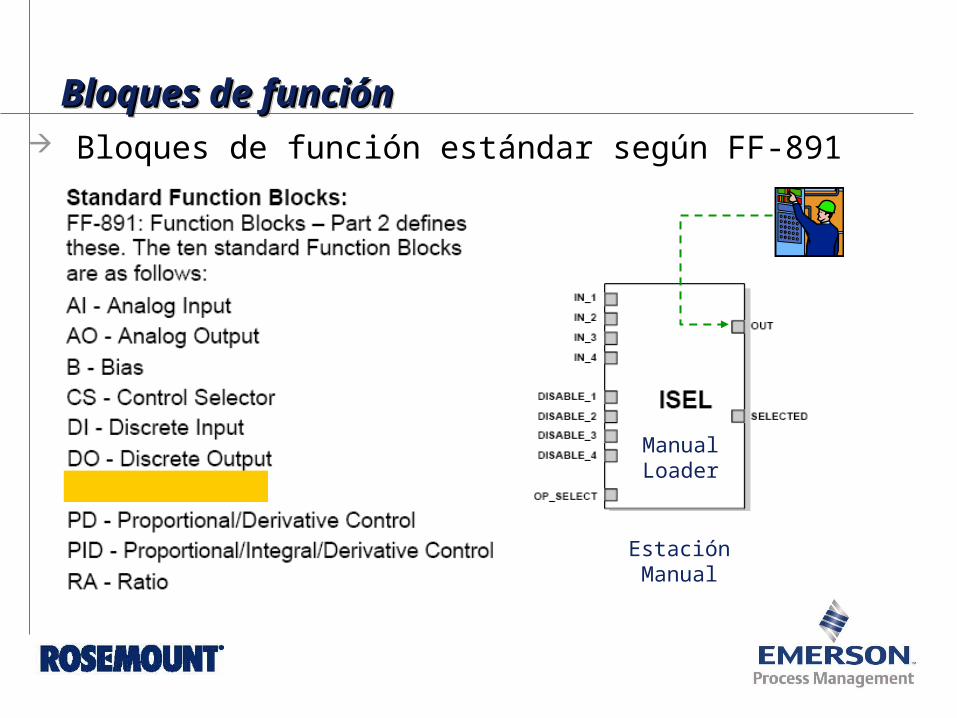
Bloques de funciónBloques de función Bloques de funciónBloques de función Bloques de función estándar según FF-891
ManualLoader
EstaciónManual

Bloques de funciónBloques de función Bloques de funciónBloques de función Bloques de función estándar según FF-891
Ratio
IN_1 x IN_2X
(K)
Bloques de funciónBloques de función Bloques de funciónBloques de función Bloques de función estándar según FF-891
– Entrada Analógica AI(E)AI(E)
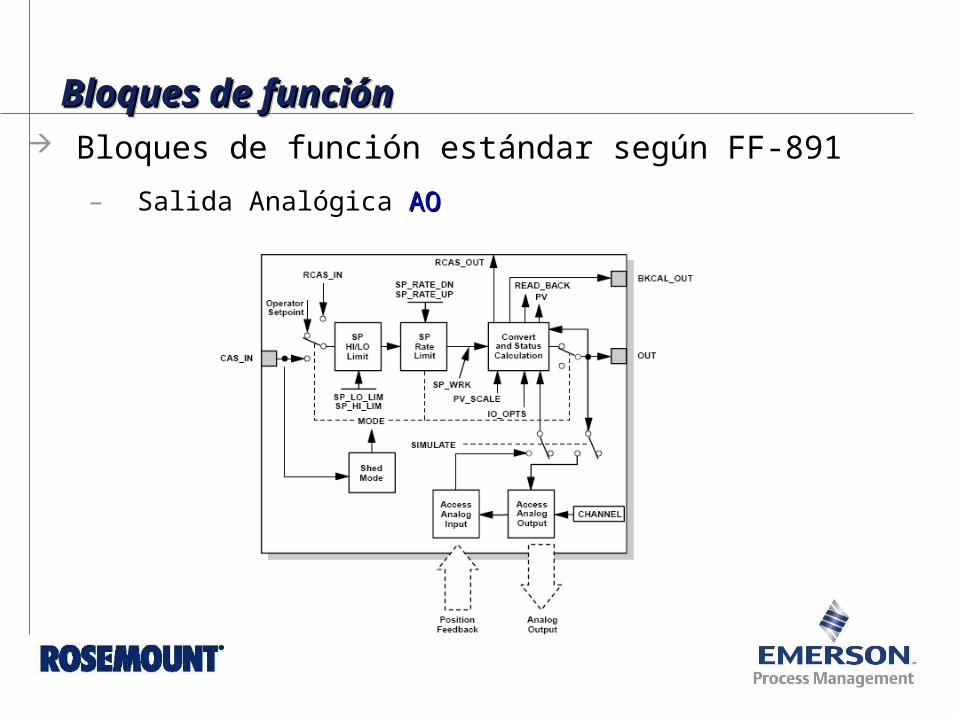
Bloques de funciónBloques de función Bloques de funciónBloques de función Bloques de función estándar según FF-891
– Salida Analógica AOAO

Bloques de funciónBloques de función Bloques de funciónBloques de función Bloques de función estándar según FF-891
– Aritmético ARTHARTH
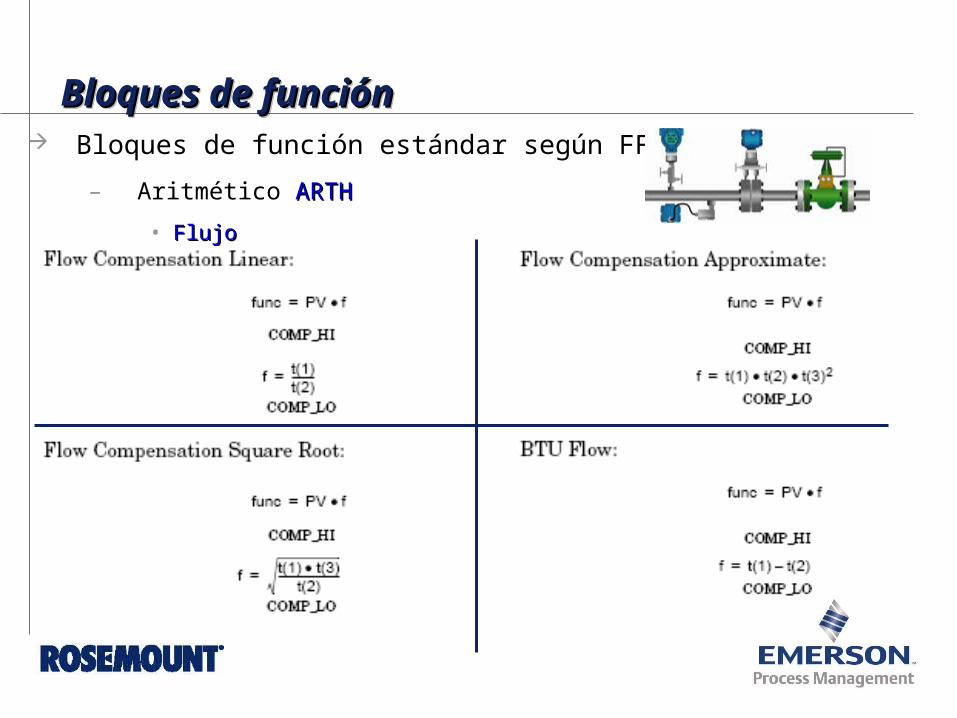
Bloques de funciónBloques de función Bloques de funciónBloques de función Bloques de función estándar según FF-891
– Aritmético ARTHARTH
• FlujoFlujo
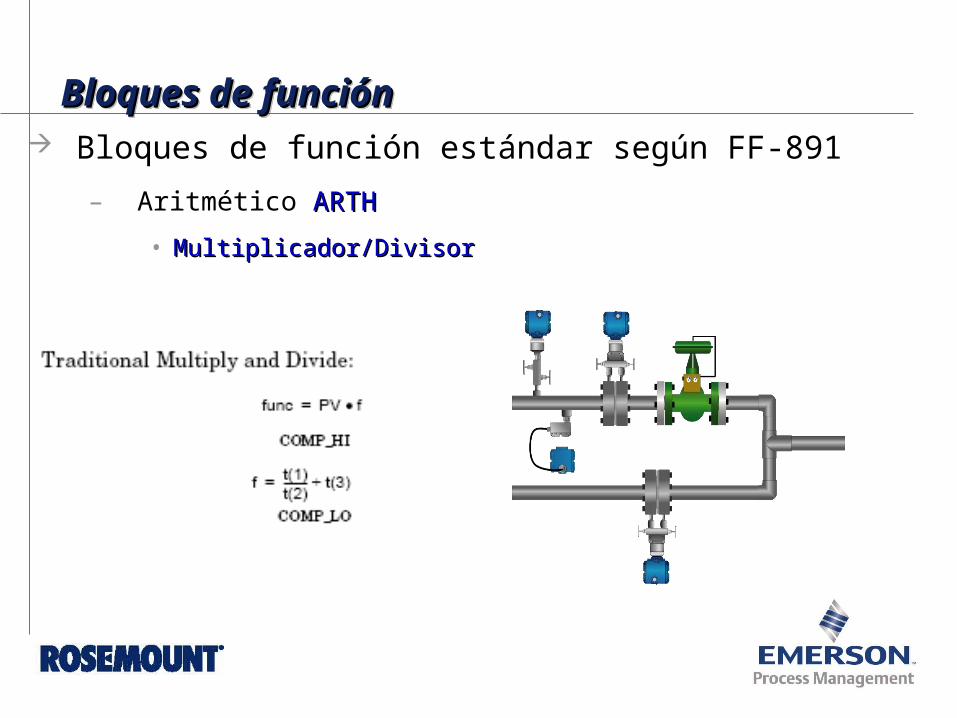
Bloques de funciónBloques de función Bloques de funciónBloques de función Bloques de función estándar según FF-891
– Aritmético ARTHARTH
• Multiplicador/DivisorMultiplicador/Divisor
Bloques de funciónBloques de función Bloques de funciónBloques de función Bloques de función estándar según FF-891
– Aritmético ARTHARTH
• PremediadorPremediador
T1
T2
T3
T4
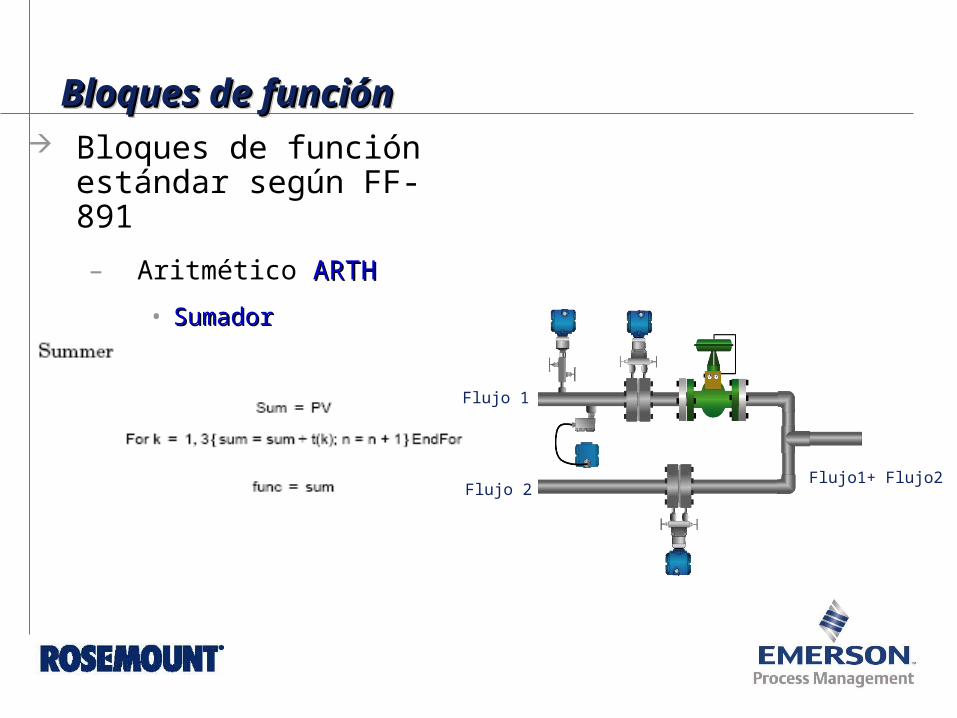
Bloques de funciónBloques de función Bloques de funciónBloques de función Bloques de función
estándar según FF-891
– Aritmético ARTHARTH
• SumadorSumador
Flujo 1
Flujo 2Flujo1+ Flujo2
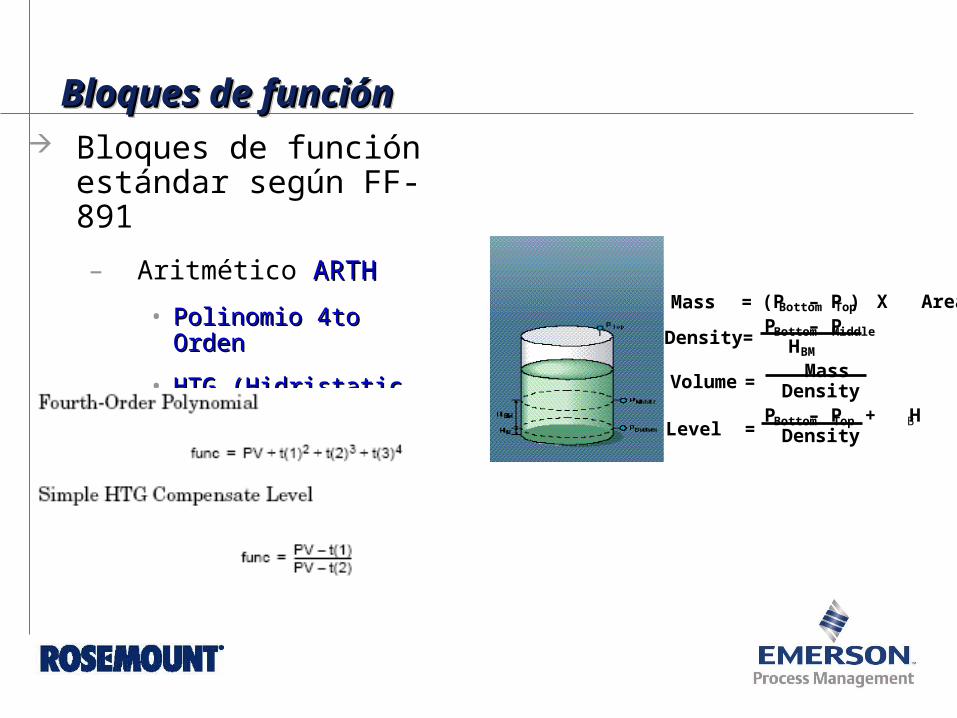
Bloques de funciónBloques de función Bloques de funciónBloques de función Bloques de función
estándar según FF-891
– Aritmético ARTHARTH
• Polinomio 4to OrdenPolinomio 4to Orden
• HTG (Hidristatic Tank HTG (Hidristatic Tank GaugingGauging
(PBottom – PTop) X Area PBottom – PMiddle
HBM
Mass Density PBottom – PTop + HB
Density
Density =
Volume =
Level =
Mass =
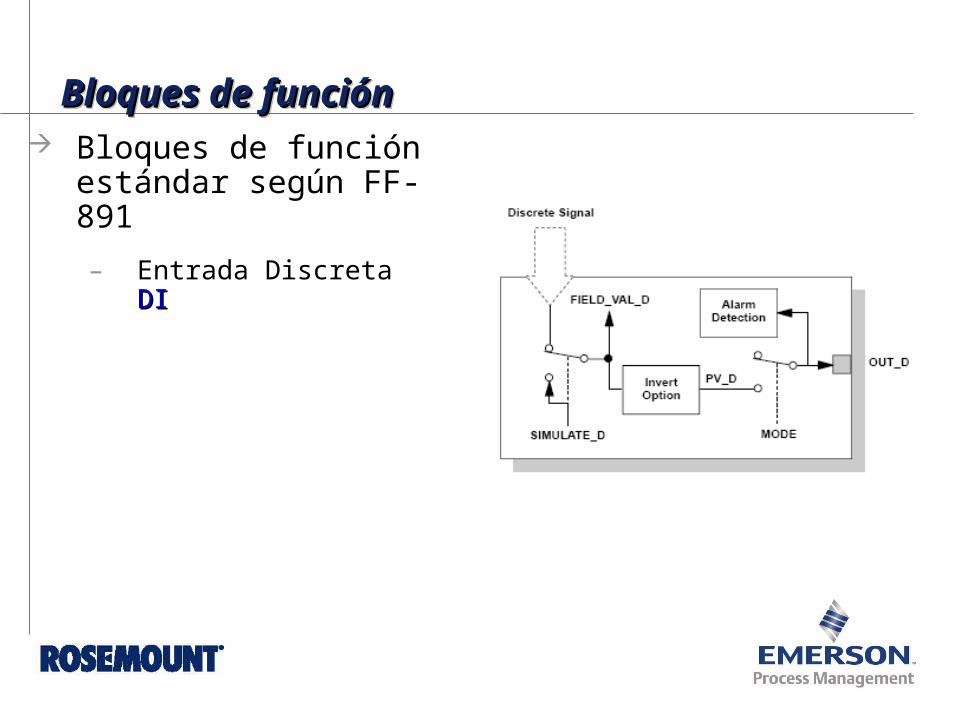
Bloques de funciónBloques de función Bloques de funciónBloques de función Bloques de función
estándar según FF-891
– Entrada Discreta DIDI
Bloques de funciónBloques de función Bloques de funciónBloques de función Bloques de función
estándar según FF-891
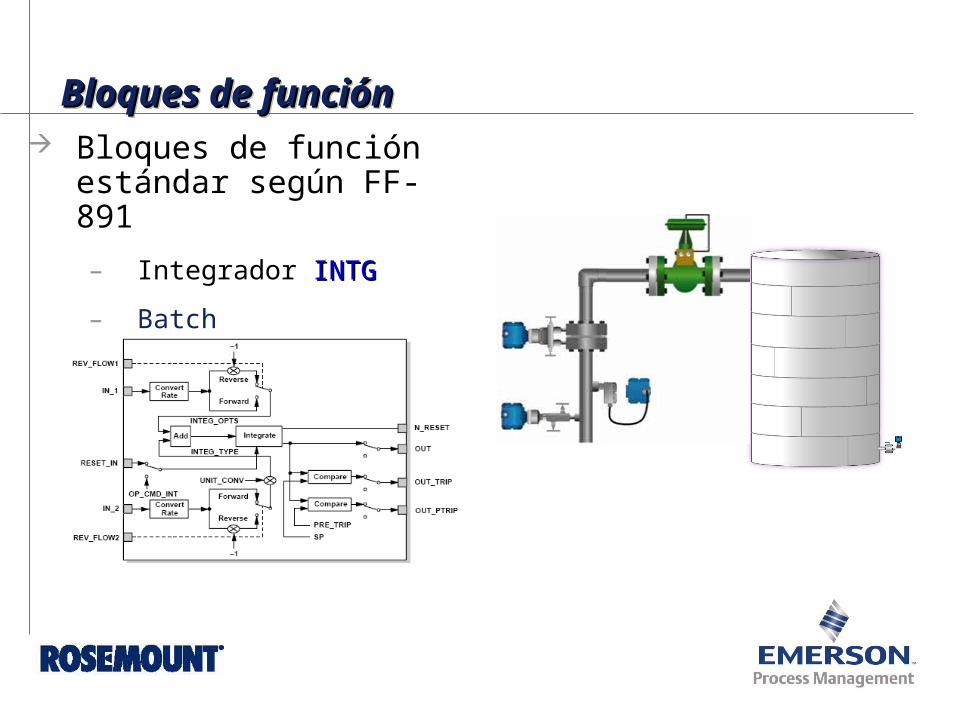
– Integrador INTGINTG
– Batch
Bloques de funciónBloques de función Bloques de funciónBloques de función Bloques de función
estándar según FF-891
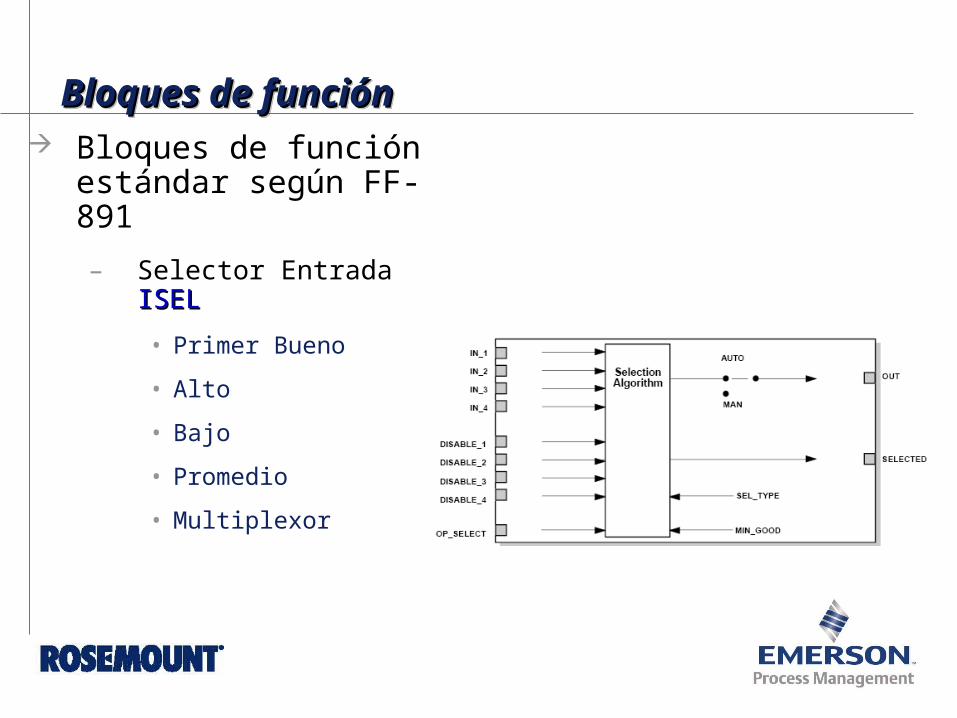
– Selector Entrada ISELISEL
• Primer Bueno
• Alto
• Bajo
• Promedio
• Multiplexor
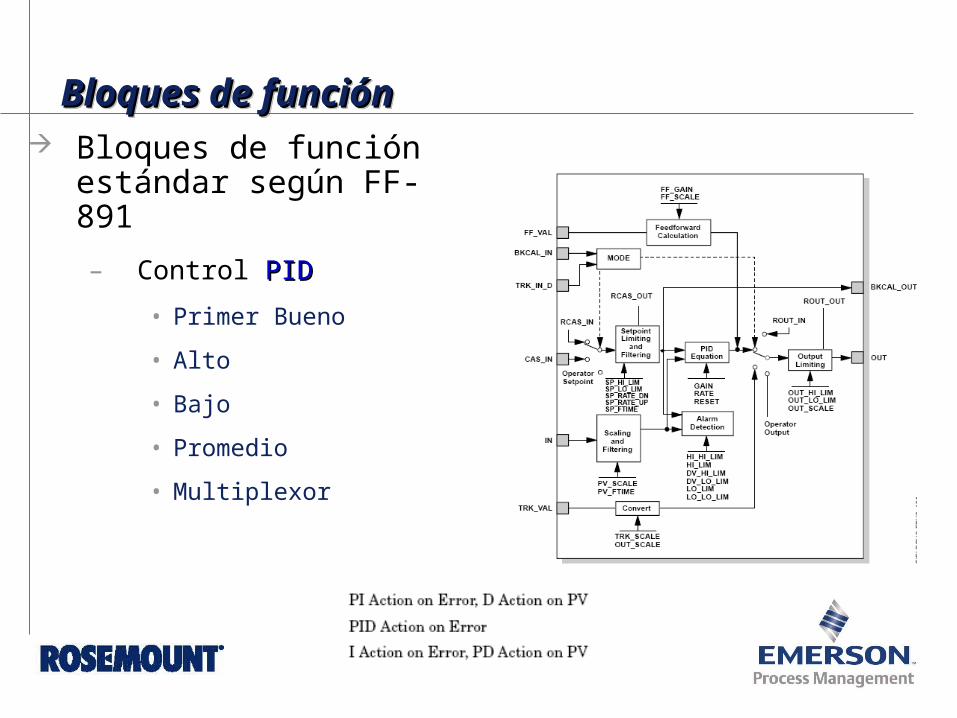
Bloques de funciónBloques de función Bloques de funciónBloques de función Bloques de función
estándar según FF-891
– Control PIDPID
• Primer Bueno
• Alto
• Bajo
• Promedio
• Multiplexor
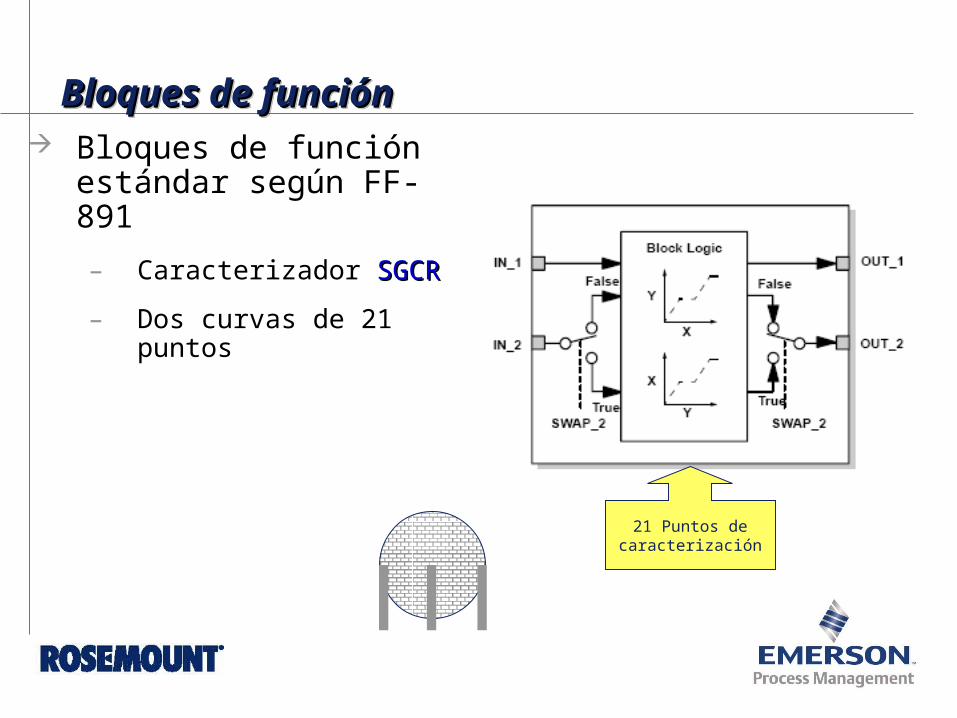
Bloques de funciónBloques de función Bloques de funciónBloques de función Bloques de función
estándar según FF-891
– Caracterizador SGCRSGCR
– Dos curvas de 21 puntos
21 Puntos decaracterización
Aplicaciones comunes con Bloques de Aplicaciones comunes con Bloques de Función Entrada AnalógicaFunción Entrada AnalógicaAplicaciones comunes con Bloques de Aplicaciones comunes con Bloques de Función Entrada AnalógicaFunción Entrada Analógica
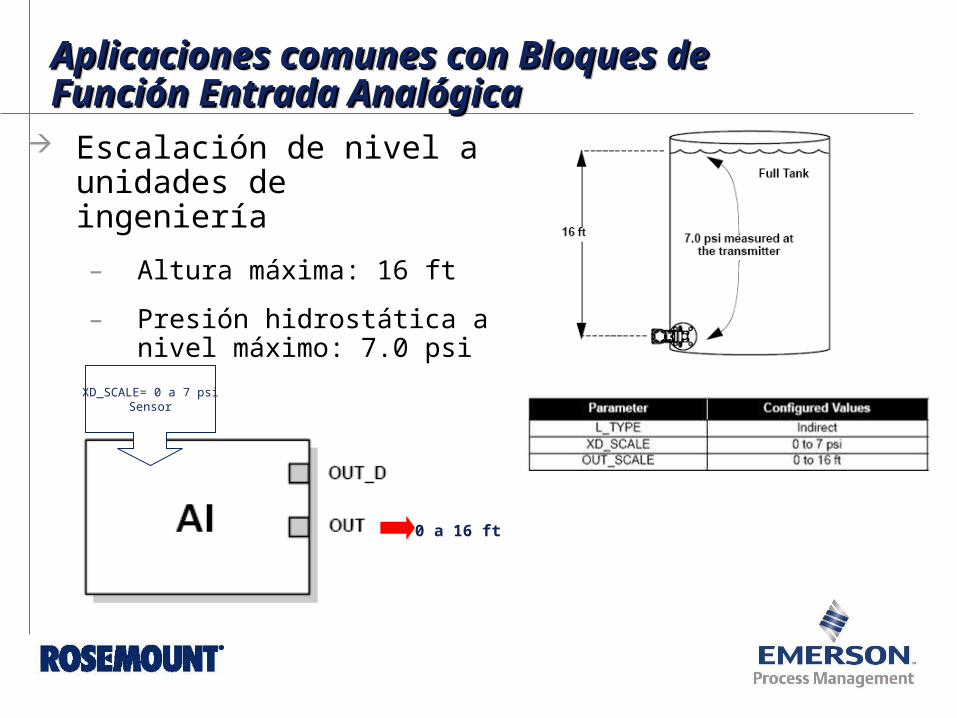
Escalación de nivel a unidades de ingeniería
– Altura máxima: 16 ft
– Presión hidrostática a nivel máximo: 7.0 psi
XD_SCALE= 0 a 7 psiSensor
0 a 16 ft
Aplicaciones comunes con Bloques de Aplicaciones comunes con Bloques de Función Entrada Analógica supresión ZeroFunción Entrada Analógica supresión ZeroAplicaciones comunes con Bloques de Aplicaciones comunes con Bloques de Función Entrada Analógica supresión ZeroFunción Entrada Analógica supresión Zero
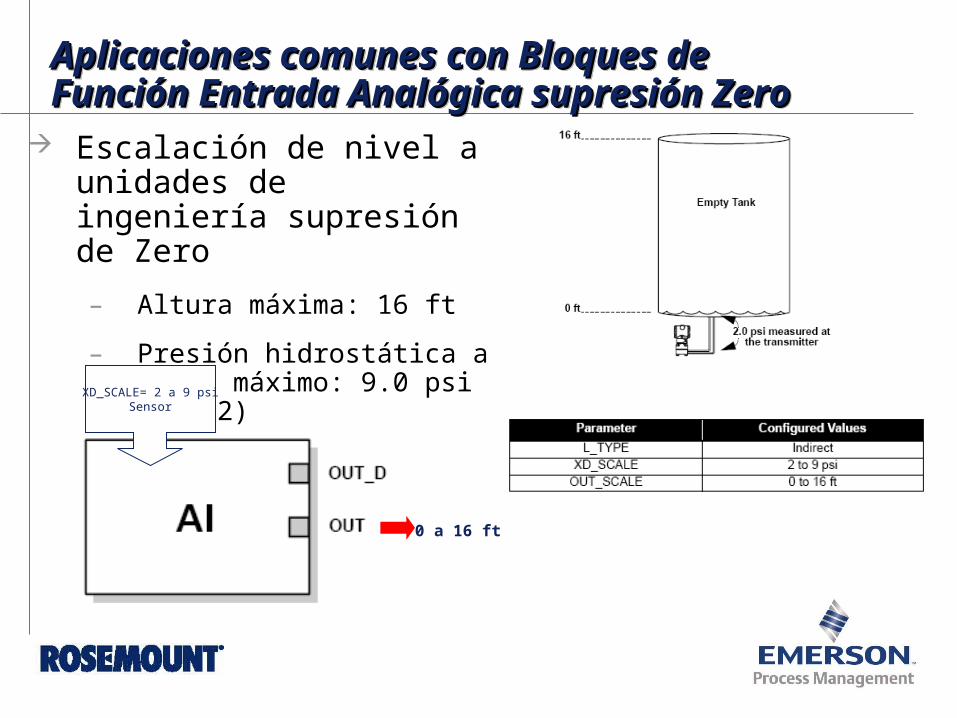
Escalación de nivel a unidades de ingeniería supresión de Zero
– Altura máxima: 16 ft
– Presión hidrostática a nivel máximo: 9.0 psi (7 + 2)
XD_SCALE= 2 a 9 psiSensor
0 a 16 ft
Aplicaciones comunes con Bloques de Aplicaciones comunes con Bloques de Función Control de FlujoFunción Control de FlujoAplicaciones comunes con Bloques de Aplicaciones comunes con Bloques de Función Control de FlujoFunción Control de Flujo
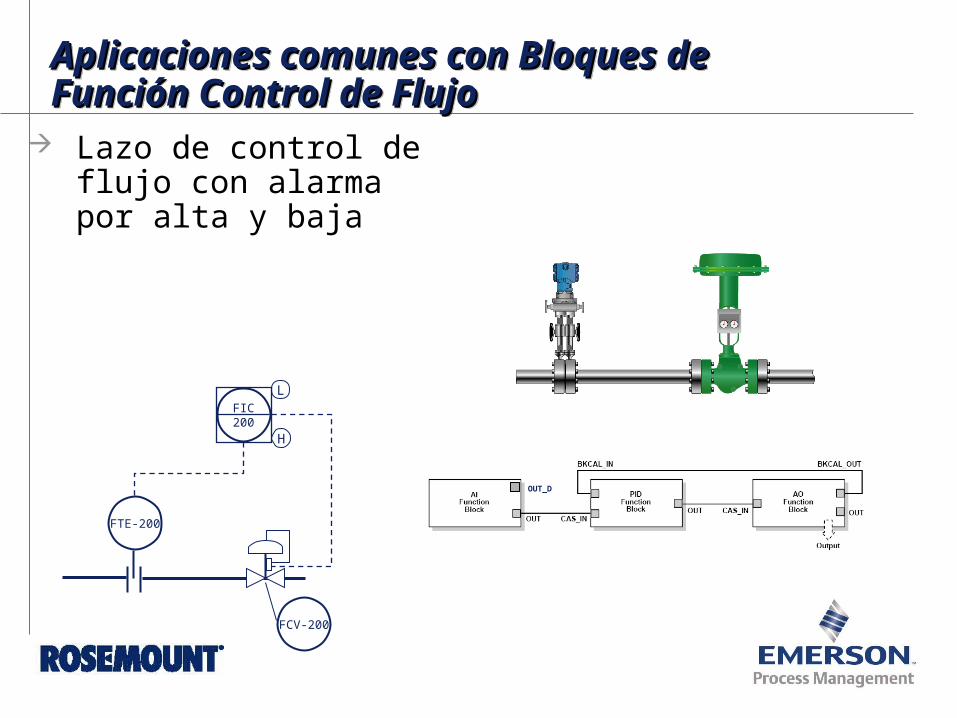
Lazo de control de flujo con alarma por alta y baja
FTE-200
FIC200
H
L
FCV-200
OUT_D
Aplicaciones comunes con Bloques de Aplicaciones comunes con Bloques de Función Control de FlujoFunción Control de FlujoAplicaciones comunes con Bloques de Aplicaciones comunes con Bloques de Función Control de FlujoFunción Control de Flujo
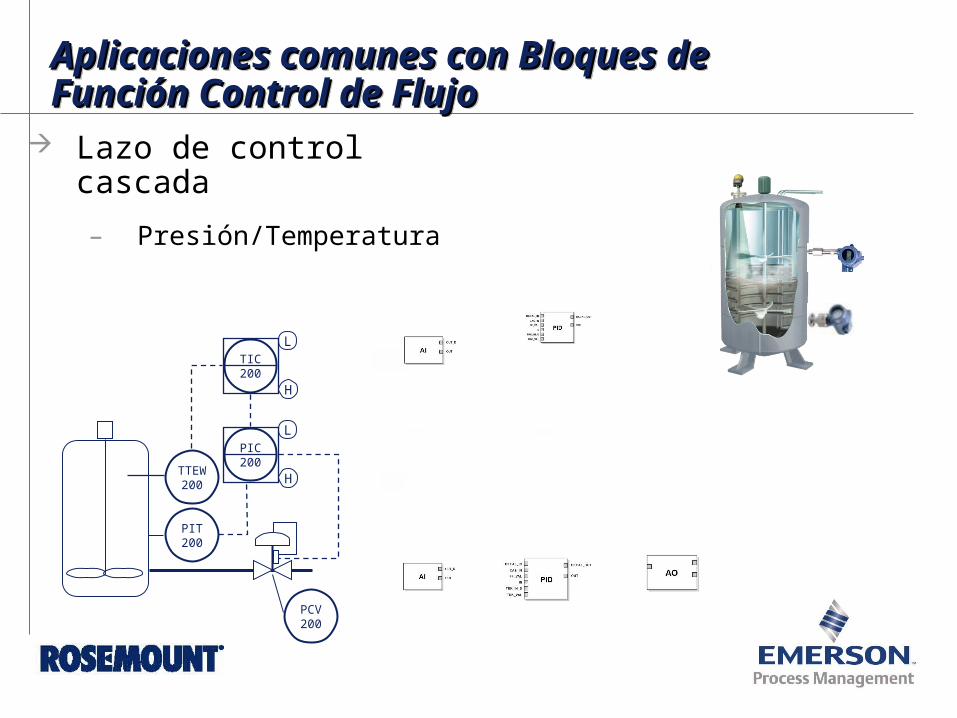
Lazo de control cascada
– Presión/Temperatura
PIT200
TIC200
H
L
PCV200
TTEW200
PIC200
H
L
Mejores Prácticas en configuración de Mejores Prácticas en configuración de lazoslazosMejores Prácticas en configuración de Mejores Prácticas en configuración de lazoslazos
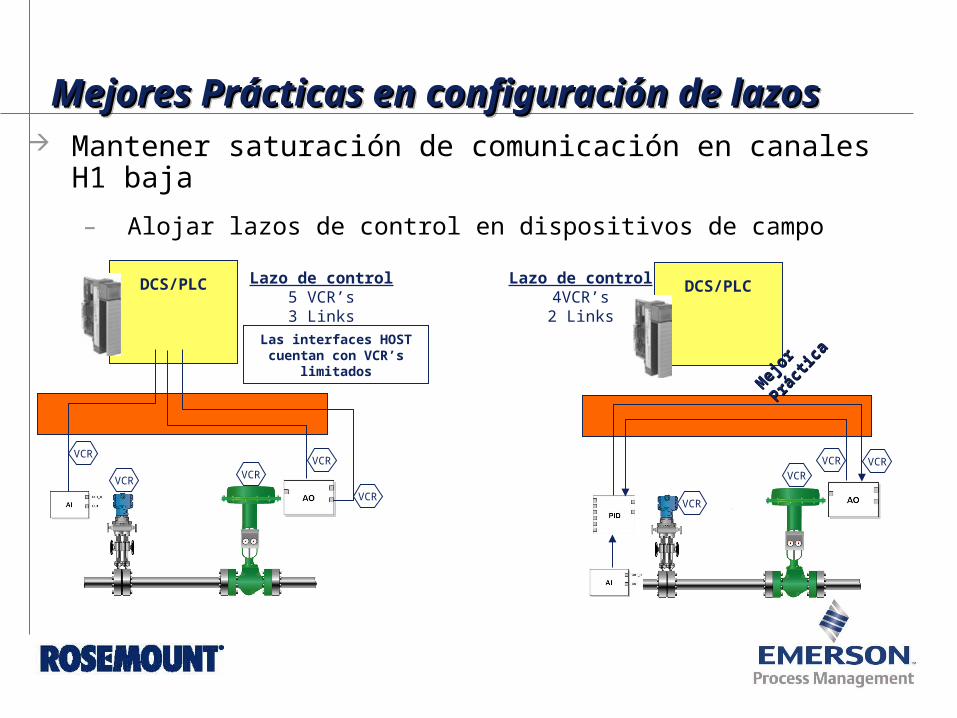
Mantener saturación de comunicación en canales H1 baja
– Alojar lazos de control en dispositivos de campo
DCS/PLC DCS/PLCLazo de control5 VCR’s3 Links
VCR VCR
VCR
VCRVCR
VCR VCR
VCR
VCR
Lazo de control4VCR’s2 Links
Mej
or
Mej
or Prá
ctic
a
Práct
ica
Las interfaces HOST cuentan con VCR’s
limitados
Mejores Prácticas en configuración de Mejores Prácticas en configuración de lazoslazosMejores Prácticas en configuración de Mejores Prácticas en configuración de lazoslazos
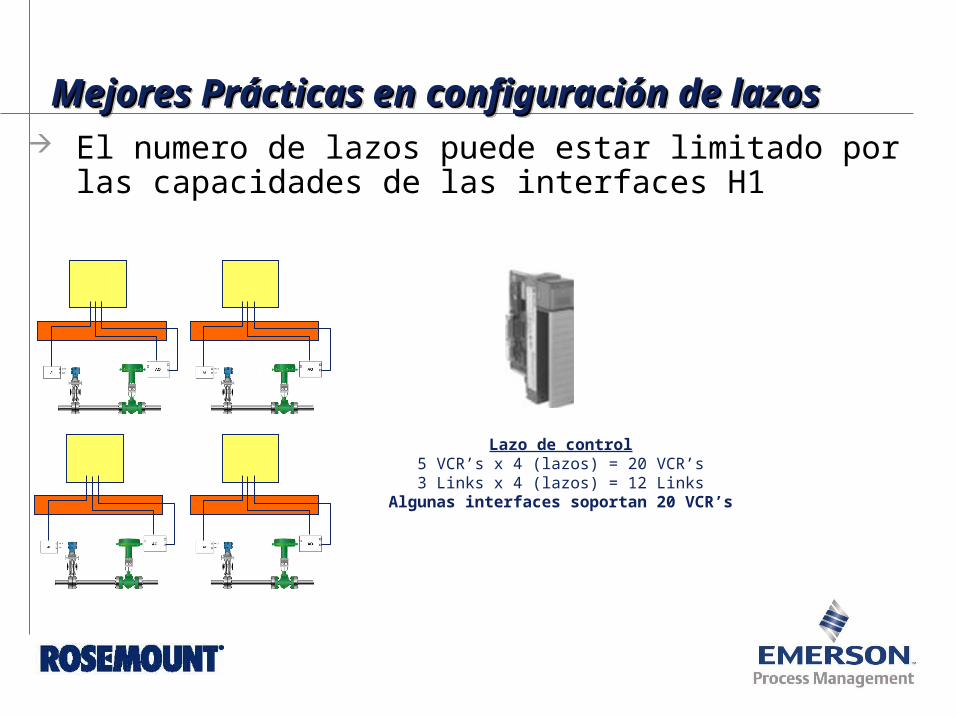
El numero de lazos puede estar limitado por las capacidades de las interfaces H1
Lazo de control5 VCR’s x 4 (lazos) = 20 VCR’s3 Links x 4 (lazos) = 12 Links
Algunas interfaces soportan 20 VCR’s
Mejores Prácticas en configuración de Mejores Prácticas en configuración de lazoslazosMejores Prácticas en configuración de Mejores Prácticas en configuración de lazoslazos
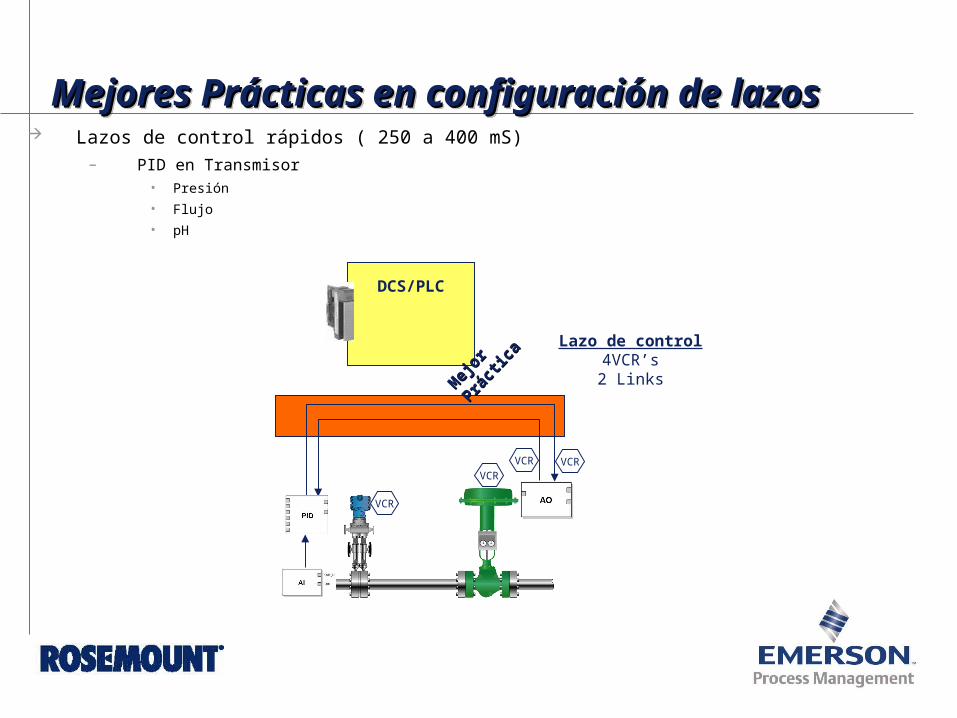
Lazos de control rápidos ( 250 a 400 mS)– PID en Transmisor
• Presión
• Flujo
• pH
DCS/PLC
VCR VCR
VCR
VCR
Lazo de control4VCR’s2 LinksM
ejor
Mej
or Prá
ctic
a
Práct
ica
Mejores Prácticas en configuración de Mejores Prácticas en configuración de lazoslazosMejores Prácticas en configuración de Mejores Prácticas en configuración de lazoslazos
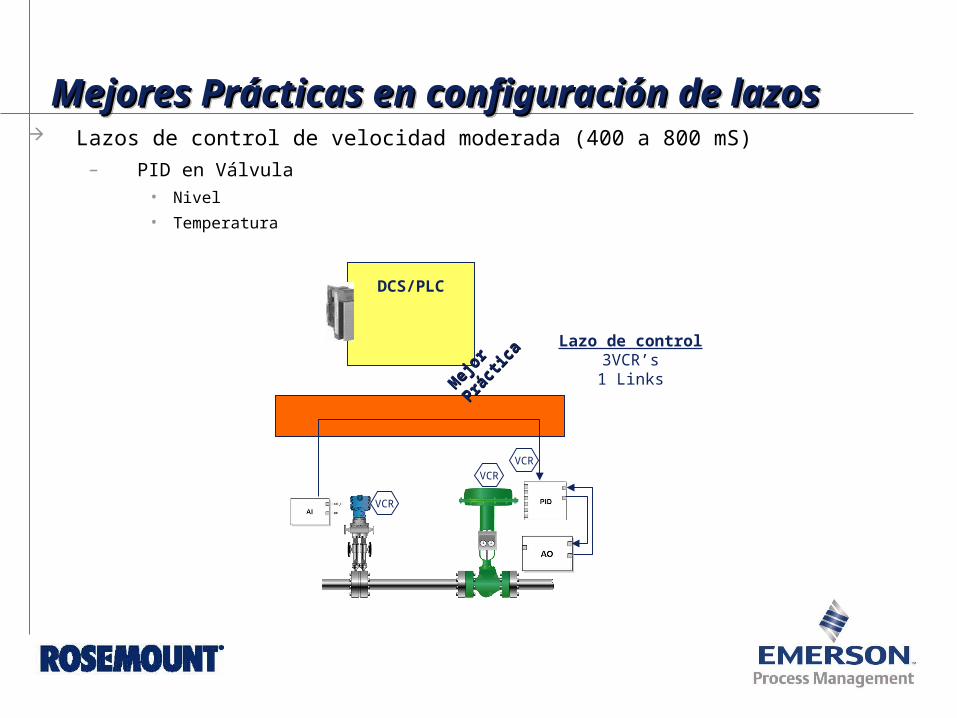
Lazos de control de velocidad moderada (400 a 800 mS)– PID en Válvula
• Nivel
• Temperatura
DCS/PLC
VCR
VCR
VCR
Lazo de control3VCR’s1 LinksM
ejor
Mej
or Prá
ctic
a
Práct
ica
Mejores Prácticas en configuración de Mejores Prácticas en configuración de lazoslazosMejores Prácticas en configuración de Mejores Prácticas en configuración de lazoslazos
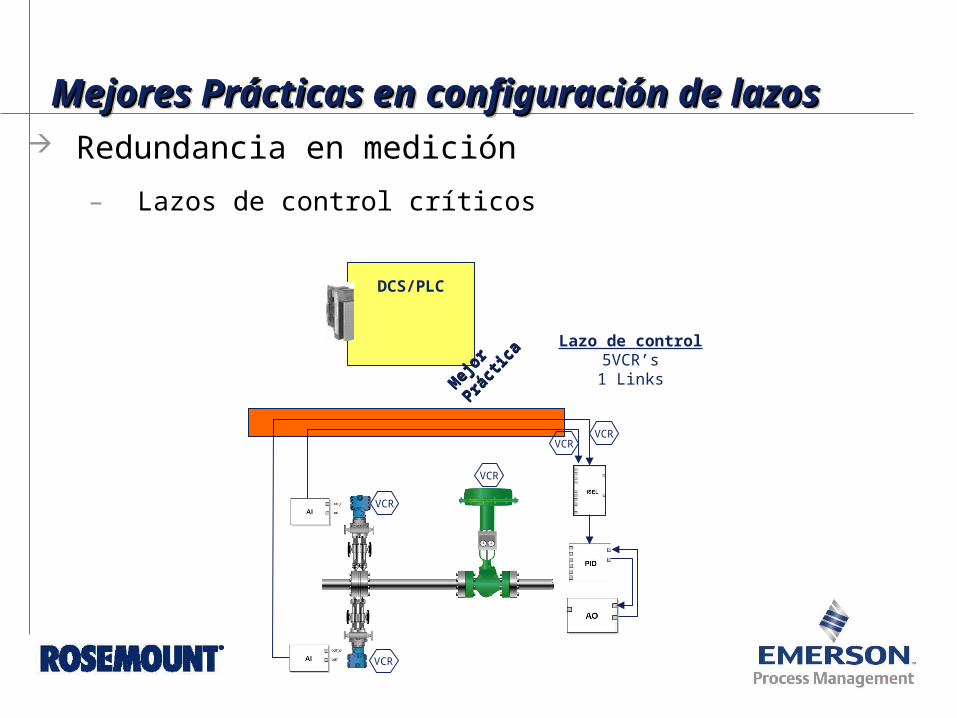
Redundancia en medición
– Lazos de control críticos
DCS/PLC
VCR
VCR
VCR
Lazo de control5VCR’s1 LinksM
ejor
Mej
or Prá
ctic
a
Práct
ica
VCR
VCR
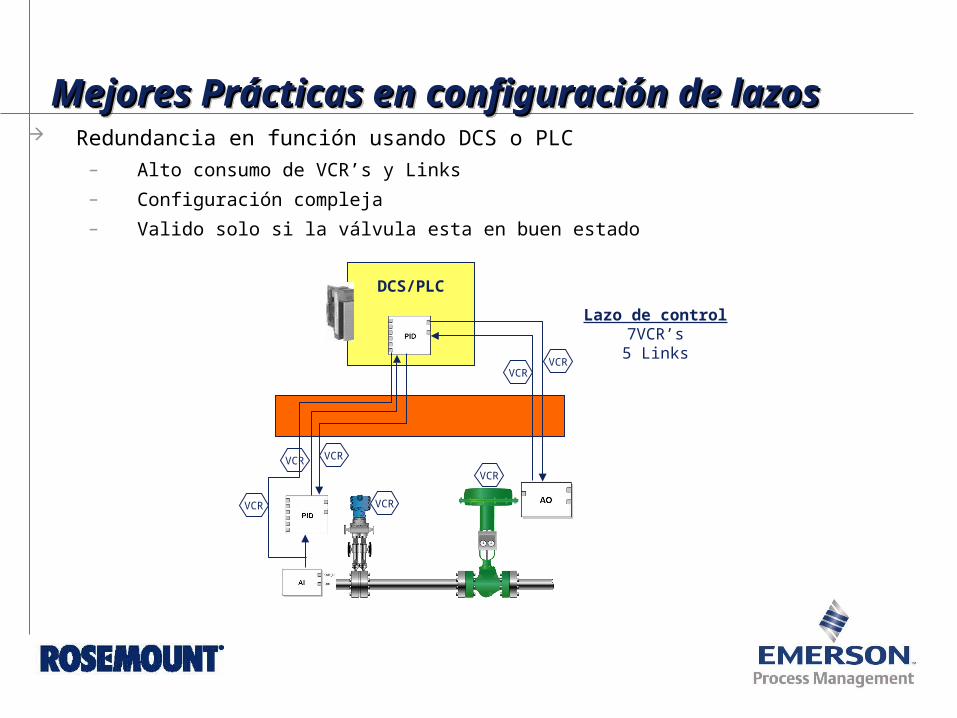
Mejores Prácticas en configuración de Mejores Prácticas en configuración de lazoslazosMejores Prácticas en configuración de Mejores Prácticas en configuración de lazoslazos
Redundancia en función usando DCS o PLC– Alto consumo de VCR’s y Links
– Configuración compleja
– Valido solo si la válvula esta en buen estado
VCR
Lazo de control7VCR’s5 Links
VCR
DCS/PLC
VCR
VCR
VCR
VCR
VCR
Especificación de Dispositivos Especificación de Dispositivos FoundationFoundationTMTM Fieldbus FieldbusEspecificación de Dispositivos Especificación de Dispositivos FoundationFoundationTMTM Fieldbus Fieldbus
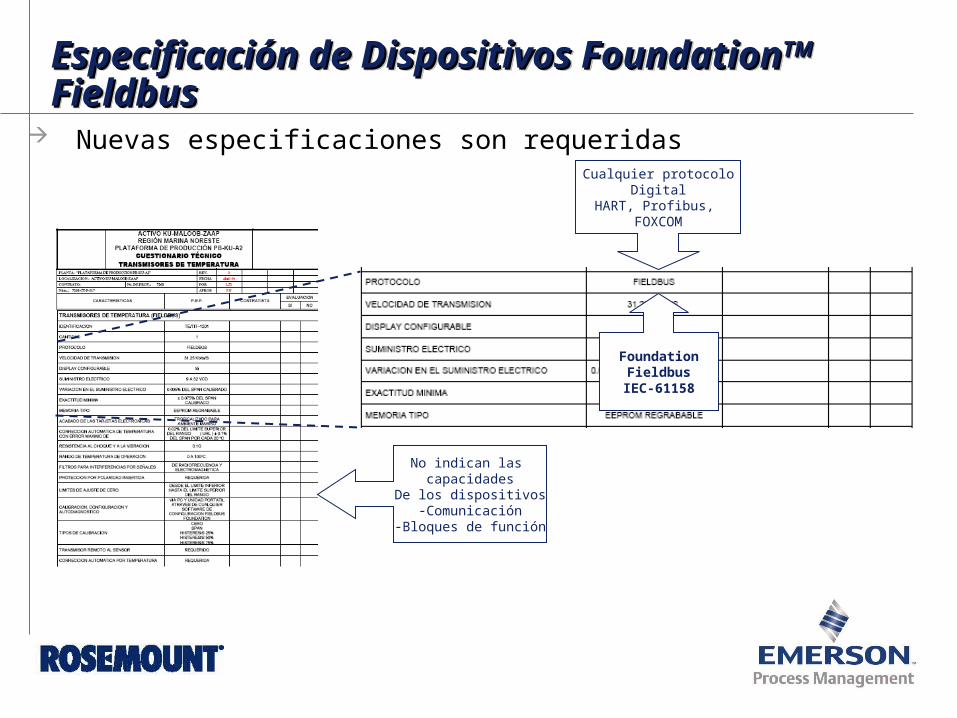
Nuevas especificaciones son requeridasCualquier protocolo
DigitalHART, Profibus,
FOXCOM
FoundationFieldbus
IEC-61158
No indican las capacidades
De los dispositivos-Comunicación
-Bloques de función
Especificación de Dispositivos Especificación de Dispositivos FoundationFoundationTMTM Fieldbus FieldbusEspecificación de Dispositivos Especificación de Dispositivos FoundationFoundationTMTM Fieldbus Fieldbus
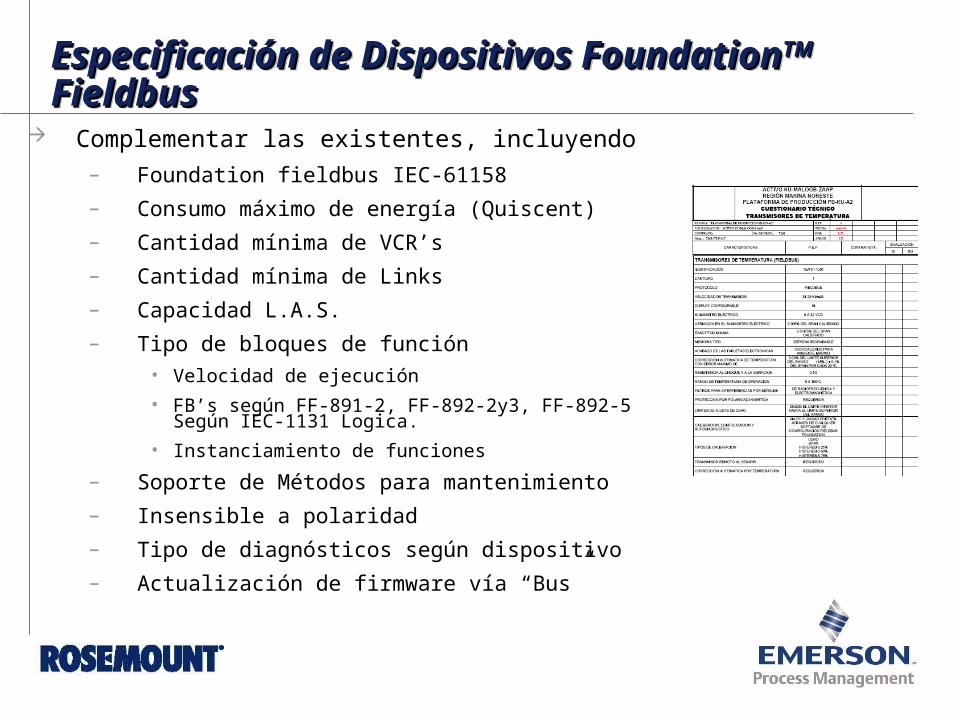
Complementar las existentes, incluyendo– Foundation fieldbus IEC-61158
– Consumo máximo de energía (Quiscent)
– Cantidad mínima de VCR’s
– Cantidad mínima de Links
– Capacidad L.A.S.
– Tipo de bloques de función• Velocidad de ejecución
• FB’s según FF-891-2, FF-892-2y3, FF-892-5 Según IEC-1131 Logica.
• Instanciamiento de funciones
– Soporte de Métodos para mantenimiento
– Insensible a polaridad
– Tipo de diagnósticos según dispositivo
– Actualización de firmware vía “Bus”
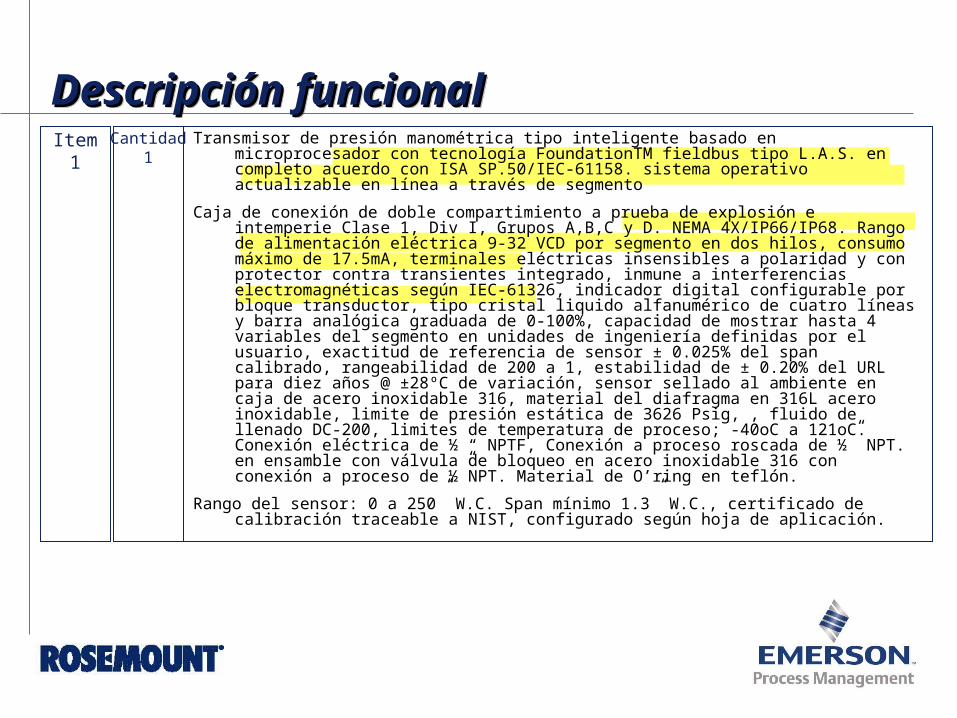
Descripción funcionalDescripción funcionalDescripción funcionalDescripción funcionalTransmisor de presión manométrica tipo inteligente basado en microprocesador con
tecnología FoundationTM fieldbus tipo L.A.S. en completo acuerdo con ISA SP.50/IEC-61158. sistema operativo actualizable en línea a través de segmento
Caja de conexión de doble compartimiento a prueba de explosión e intemperie Clase 1, Div I, Grupos A,B,C y D. NEMA 4X/IP66/IP68. Rango de alimentación eléctrica 9-32 VCD por segmento en dos hilos, consumo máximo de 17.5mA, terminales eléctricas insensibles a polaridad y con protector contra transientes integrado, inmune a interferencias electromagnéticas según IEC-61326, indicador digital configurable por bloque transductor, tipo cristal liquido alfanumérico de cuatro líneas y barra analógica graduada de 0-100%, capacidad de mostrar hasta 4 variables del segmento en unidades de ingeniería definidas por el usuario, exactitud de referencia de sensor ± 0.025% del span calibrado, rangeabilidad de 200 a 1, estabilidad de ± 0.20% del URL para diez años @ ±28ºC de variación, sensor sellado al ambiente en caja de acero inoxidable 316, material del diafragma en 316L acero inoxidable, limite de presión estática de 3626 Psig, , fluido de llenado DC-200, limites de temperatura de proceso; -40oC a 121oC. Conexión eléctrica de ½ “ NPTF, Conexión a proceso roscada de ½” NPT. en ensamble con válvula de bloqueo en acero inoxidable 316 con conexión a proceso de ½”NPT. Material de O’ring en teflón.
Rango del sensor: 0 a 250” W.C. Span mínimo 1.3” W.C., certificado de calibración traceable a NIST, configurado según hoja de aplicación.
Cantidad1
Item1
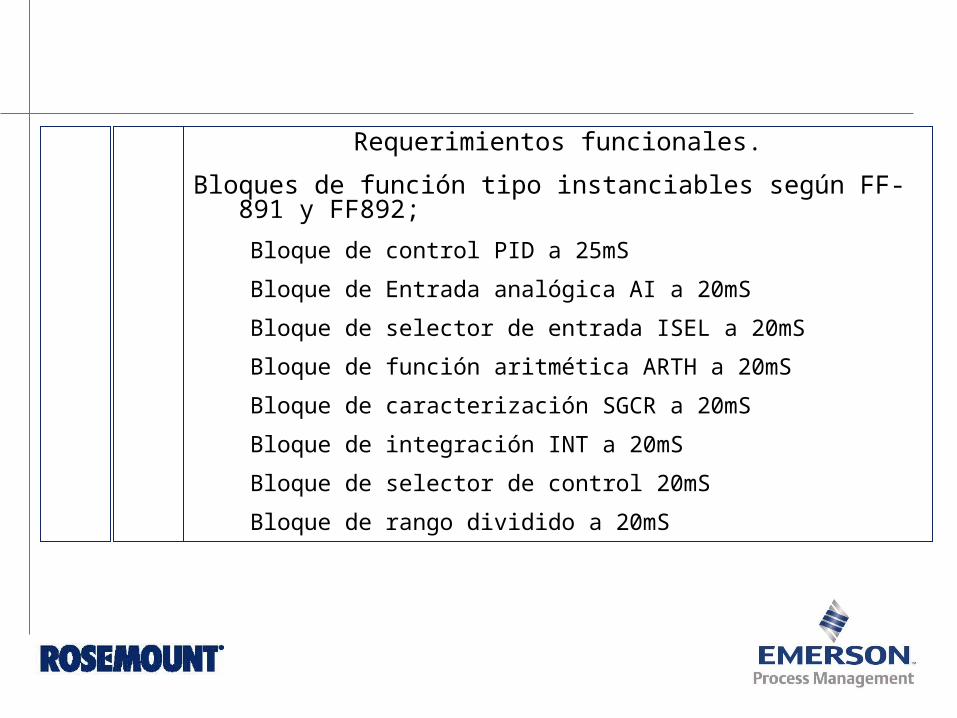
Requerimientos funcionales.
Bloques de función tipo instanciables según FF-891 y FF892;
Bloque de control PID a 25mS
Bloque de Entrada analógica AI a 20mS
Bloque de selector de entrada ISEL a 20mS
Bloque de función aritmética ARTH a 20mS
Bloque de caracterización SGCR a 20mS
Bloque de integración INT a 20mS
Bloque de selector de control 20mS
Bloque de rango dividido a 20mS
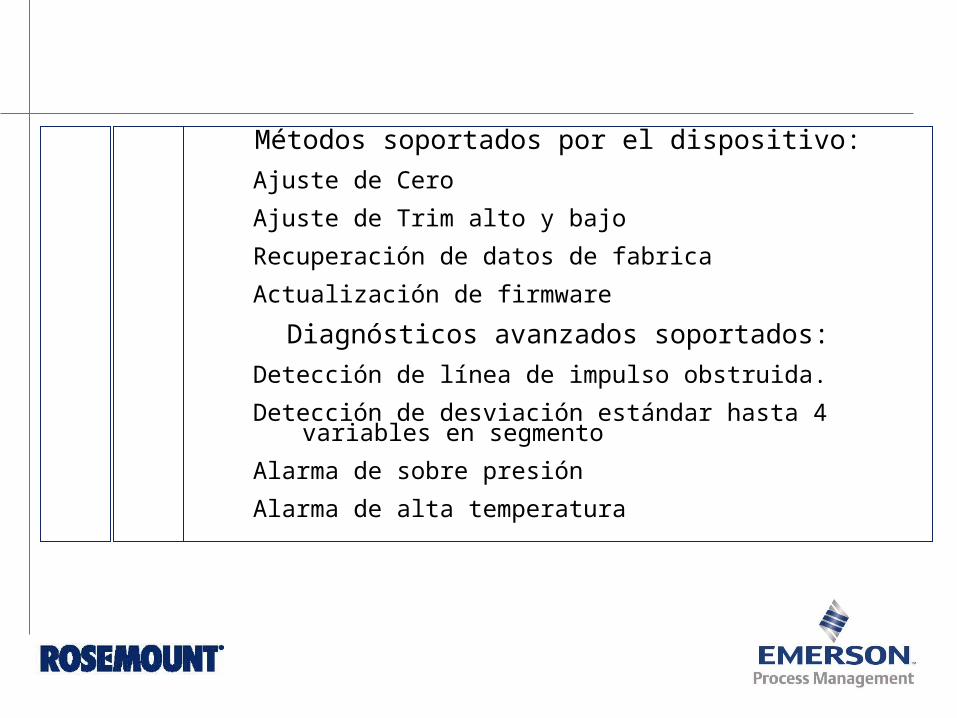
Métodos soportados por el dispositivo:
Ajuste de Cero
Ajuste de Trim alto y bajo
Recuperación de datos de fabrica
Actualización de firmware
Diagnósticos avanzados soportados:
Detección de línea de impulso obstruida.
Detección de desviación estándar hasta 4 variables en segmento
Alarma de sobre presión
Alarma de alta temperatura
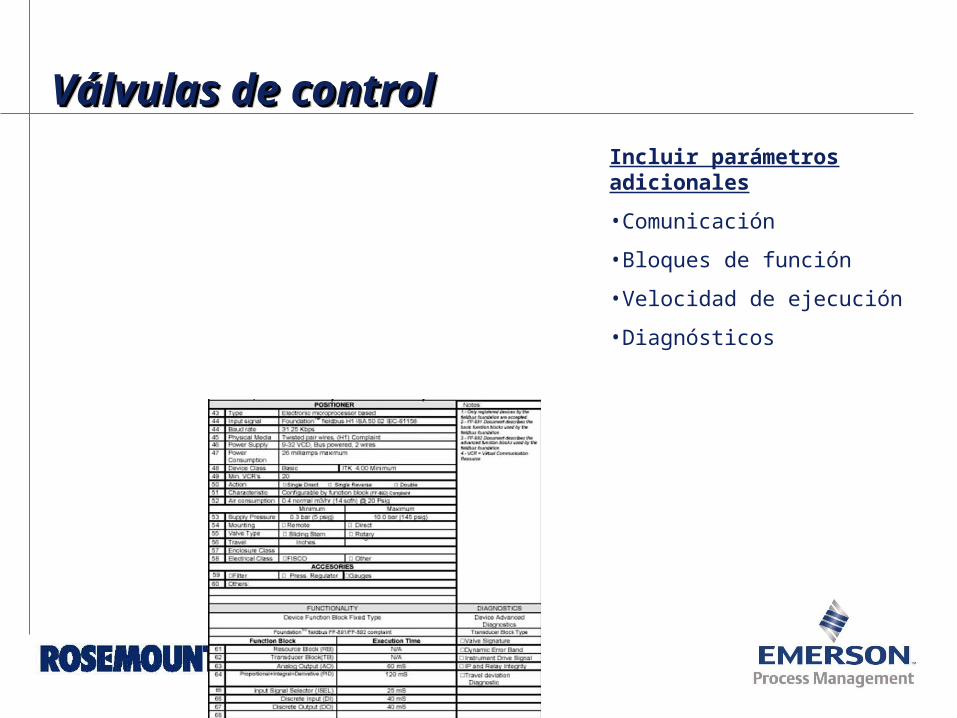
Válvulas de controlVálvulas de controlVálvulas de controlVálvulas de control
Incluir parámetros adicionales
•Comunicación
•Bloques de función
•Velocidad de ejecución
•Diagnósticos
Especificaciones generales
– Dispositivos a dos hilos
• Consumo máximo: 22 mA
• Insensible a polaridad
• Software actualizable por canal H1
• Capacidad L.A.S.
• Soporte de Métodos de mantenimiento
• Suministro 9-32 VCD
Especificación de Dispositivos Especificación de Dispositivos FoundationTM FieldbusFoundationTM FieldbusEspecificación de Dispositivos Especificación de Dispositivos FoundationTM FieldbusFoundationTM Fieldbus
Especificaciones generales dispositivos de monitoreo
– Bloques de función
• AI 30mS
• MAI 75mS
• MDI 75mS
• INTG 20mS
• CHAR 20mS ~ 100 mS
Especificación de Dispositivos Especificación de Dispositivos FoundationTM FieldbusFoundationTM FieldbusEspecificación de Dispositivos Especificación de Dispositivos FoundationTM FieldbusFoundationTM Fieldbus
Especificaciones generales dispositivos de control
– Bloques de función
• AI 30mS
• PID 25mS ~ 45 mS (Auto Sintonía)
• ISEL 20mS
• OSEL 20mS
• ARTH 20mS ~ 30Ms
• INTG 20mS
• CHAR 20mS
Especificación de Dispositivos Especificación de Dispositivos FoundationTM FieldbusFoundationTM FieldbusEspecificación de Dispositivos Especificación de Dispositivos FoundationTM FieldbusFoundationTM Fieldbus
Dispositivos FoundationDispositivos FoundationTMTM Fieldbus FieldbusDiagnosticosDiagnosticosDispositivos FoundationDispositivos FoundationTMTM Fieldbus FieldbusDiagnosticosDiagnosticos
Diagnosticos avanzados en dispositivos de control y seguridad
– Transmisores de Temperatura
• Falla de sensor con reslpado
• Degradacion de sensor
Dispositivos FoundationDispositivos FoundationTMTM Fieldbus FieldbusDiagnosticosDiagnosticosDispositivos FoundationDispositivos FoundationTMTM Fieldbus FieldbusDiagnosticosDiagnosticos
Diagnosticos avanzados en dispositivos de control y seguridad
– Valvula de control
• Firma de valvula
• Desviacion de carrera
• Integridad de senal de presion
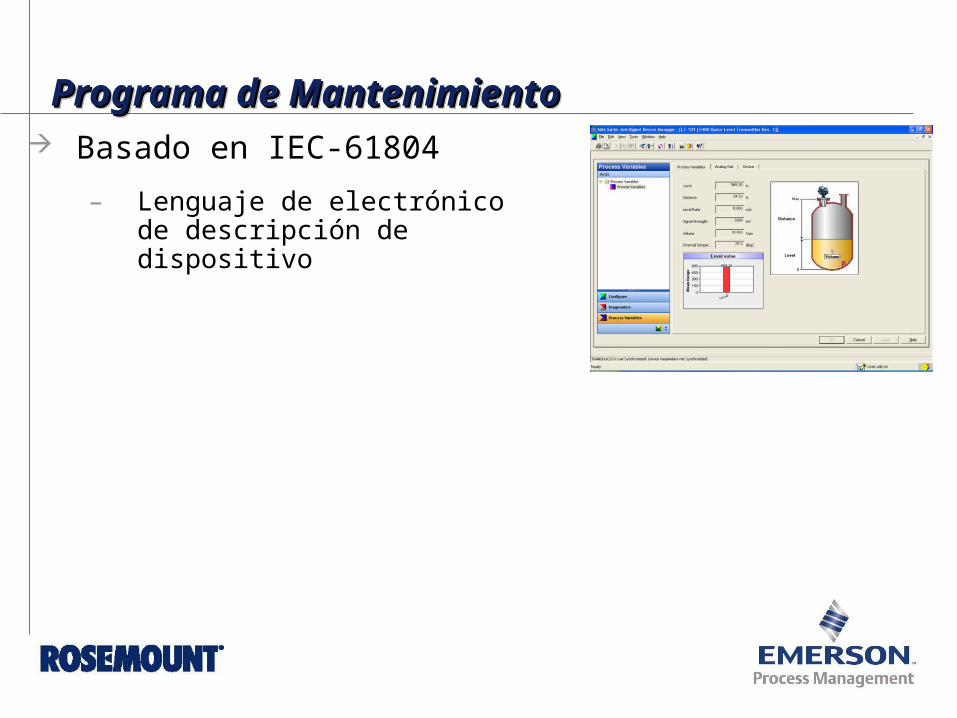
Programa de MantenimientoPrograma de MantenimientoPrograma de MantenimientoPrograma de Mantenimiento Basado en IEC-61804
– Lenguaje de electrónico de descripción de dispositivo
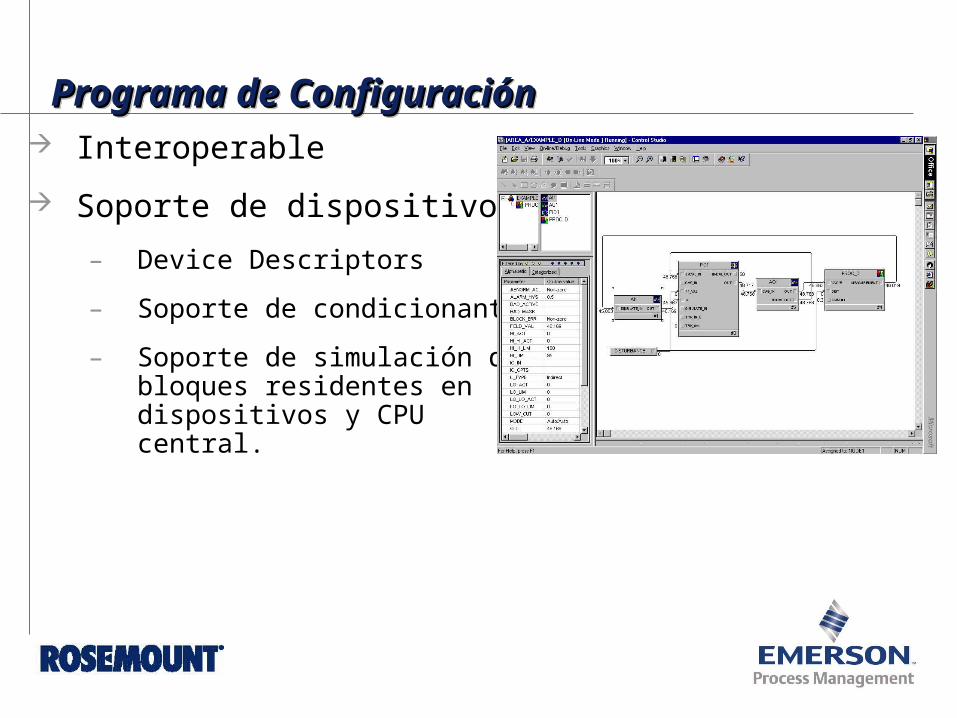
Programa de ConfiguraciónPrograma de ConfiguraciónPrograma de ConfiguraciónPrograma de Configuración Interoperable
Soporte de dispositivos
– Device Descriptors
– Soporte de condicionantes
– Soporte de simulación de bloques residentes en dispositivos y CPU central.
Gracias

























![MC-LR y [D-Leu1]MC-LR](https://img.pdfslide.tips/doc/110x75/61d4499fd2943f0e6b6a66d0/mc-lr-y-d-leu1mc-lr.jpg)


