Embed Size (px)
Citation preview

Curso de Controladores Lógicos Programables
“Modicon”
Utem
Departamento de Electricidad
Presenta:
¿ Que es un Controlador Lógico Programable? Un Controlador Lógico Programable
(Programable Logic Controler “PLC”), es un dispositivo digital utilizado para el control de máquinas y operación de procesos.
Es un aparato digital electrónico con una memoria programable para el almacenamiento de instrucciones permitiendo la implementación de funciones específicas como: lógica, secuencias, temporizado, conteo y aritmética; con el objeto de controlar máquinas y procesos.
Un Controlador Programable consta de 3 elementos principales:
El primero es el procesador, la unidad central de proceso del controlador programable. El procesador o CPU (Central Processing Unit) es el “cerebro” del controlador programable. Una vez que un programa (en la forma de diagrama de escalera) es introducido en el procesador, éste reside en la memoria hasta que sea cambiado por el usuario.
El segundo elemento principal es la estructura de entrada / salida (E/S). Esta provee la interfase entre la CPU y el proceso o maquinaria. La adición de los microprocesadores ha aumentado las posibilidades de simples funciones ON/OFF hasta hacer posible generación de reportes, control analógico, etc..
El tercer elemento es el equipo de programación. Este por lo general es un terminal tipo tubo de rayos catódicos (CTR).

Estructura de un PLC Para poder interpretar la estructura de un PLC utilizaremos un
sencillo diagrama en bloques. En la figura se muestran las tres partes fundamentales: las
entradas, la unidad central de procesos (CPU) y las salidas.

La CPU Es el cerebro del PLC, responsable de la
ejecución del programa desarrollado por el usuario. Es la unidad principal de coordinación de todas las funciones o recursos de los distintos Procesadores Periférico, Procesador de entrada /salida, Procesador de Comunicaciones, Unidad de Memoria y Fuente de alimentación.
La CPU se comunica con las interfases de I/O por medio de un bus paralelo, que incluye un bus de datos y un bus de direcciones. Adicionalmente, un bus de alimentación provee alimentación eléctrica a las interfases de I/O.

Las Entradas (interfases o adaptadores de
Entrada) se encargan de adaptar señales provenientes del campo o niveles que la CPU pueda interpretar como información. Las señales del campo pueden implicar niveles y tipos de señal eléctrica diferentes a los que maneja la CPU.
Las EntradasA las entradas se conectan sensores que pueden ser:
Pulsadores Llaves Termostatos Presostatos Límites de carrera Sensores de Proximidad Otros elementos que generan señales
binarias (ON-OFF)

Las Salidas (interfases o adaptadores de Salida)
comandan dispositivos de campo en función de la información enviada por la CPU.Las salidas comandan distintos equipos, por ejemplo:
Lámparas. Sirenas y Bocinas. Contactores de mando de Motores. Válvulas Solenoide. Otros elementos comandados por señales
binarias.
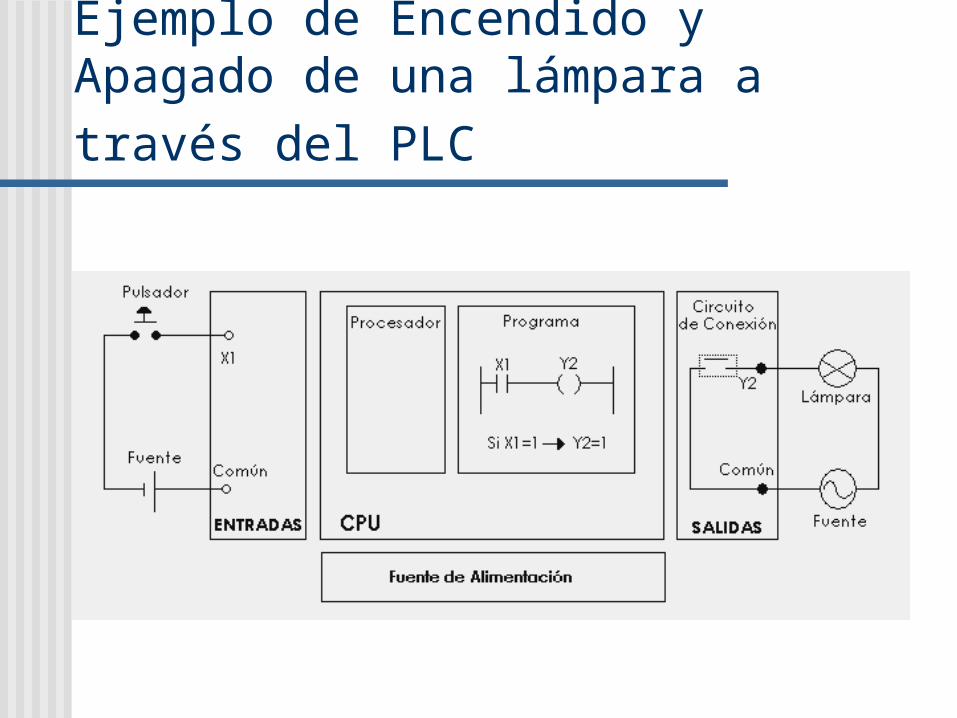
Ejemplo de Encendido y Apagado de una lámpara a través del PLC

Clasificación de los PLC’s Si deseamos establecer una clasificación de PLC’s, podemos considerar distintos aspectos:
Por su Construcción Integral. Modular.Por su Capacidad Nivel 1: Control de variables discretas y
pocas analógicas, operaciones aritméticas y capacidad de comunicación elementales.
Clasificación de los PLC’s Nivel 2: Control de variables discretas y
analógicas. Matemáticas de punto flotante. E/S inteligentes. Conexión en red. Gran capacidad de manejo de datos analógicos y discretos.
Por Cantidad de E/S Micro PLC (hasta 64 E/S). PLC pequeño (65 a 255 E/S). PLC mediano (256 a 1023 E/S). PLC grande (más de 1024 E/S).
Clasificación por Construcción La clasificación por su construcción
distingue a los PLC’s que integran todas sus partes (E/S, CPU, Fuentes; Puertos de Comunicación, etc.) en una misma caja o gabinete, de los que están formados por módulos.
PLC integral Es aquel que integra todas sus partes en
una misma caja o gabinete. Se suele utilizar también la denominación de Compacto, pero la aparición de PLC’s modulares de pequeño tamaño hace que ésta resulte inadecuada.
El PLC integral suele tener muy pocas E/S, clasificándose en general como micro PLC.

PLC modular Como su nombre lo indica, está formado
por módulos. El equipo se arma sobre un bastidor o base de montaje (también llamada chasis o rack) en el cual se instalan la CPU, los módulos de entrada, los módulos de salida y otros periféricos.
El chasis contiene en su parte posterior los buses de datos, direcciones y alimentación del PLC, con conectores apropiados a los que se conecten los distintos módulos.
PLC modular Por la forma que tienen estos módulos, es
usual que se les denomine “tarjeta”. Así es muy frecuente encontrar la frase “tarjetas de entrada / salida en referencia a los módulos de entrada / salida.
La principal ventaja de un PLC modular frente a uno integral es evidente: el usuario puede componer su equipo con la cantidad y tipo de entradas y salidas que necesite, y luego puede ampliarlo agregando los módulos necesarios.

Clasificación por Capacidad La clasificación por capacidad
distingue dos niveles, en función de la complejidad de las instrucciones que el PLC puede manejar.
El nivel 1 identifica a un PLC con instrucciones sencillas y no muy potentes.

Clasificación por Capacidad El nivel 2 identifica a los PLC’s con
funciones de mayor complejidad.Algunas de las aplicaciones que podemos encontrar en un PLC de nivel 2, y que en general no estarán en un PLC de nivel 1 son: raíz cuadrada, logaritmo, antilogaritmo, aritmética de doble precisión y de punto flotante, funciones trigonométricas, diferenciación e integración, lazos PID, etc.
Clasificación por Cantidad de E/S La clasificación por cantidad de E/S es
arbitraria. A pesar de ello, este parámetro es el indicador que habitualmente define el PLC. Los fabricantes ofrecen características tales como capacidad de memoria, operaciones aritméticas, etc., en directa relación a la cantidad de entradas y salidas que el controlador puede manejar.
Entradas y Salidas Las entradas y salidas son los
elementos del PLC que lo vinculan al campo. En el caso de las entradas, adaptan las señales de sensores para que la CPU las reconozca. En el caso de las salidas, activan un circuito de conexión (transistor, triac o relé) ante una orden de la CPU.

Tipos de Entradas y Salidas Discretas: También llamadas digitales,
lógicas, binarias u “on-off ”, pueden tomar solo dos estados. La denominación de digital es más común que las discretas, aún cuando es incorrecta, ya que todas las funciones de un PLC, incluidas las E/S, son digitales.
Analógicas: Pueden tomar una cantidad de valores intermedios dentro de un cierto límite, dependiendo de su resolución. Por ejemplo: 0 a 10 Vcc, 4 a 20 mAcc, etc.

Tipos de Entradas y Salidas Especiales: Son variantes de las
analógicas, como las entradas de pulso de alta frecuencia, termocuplas, RTDs, etc.
Inteligentes: Son módulos con procesador propio y un alto grado de flexibilidad para su programación. Durante su operación intercambian datos con la CPU.

Entradas Discretas
Existe una variada gama de alternativas para éstos módulos, con lo que se puede optar por módulos con distintas cantidades de entradas y para distintos niveles de voltaje; las más comunes son: 24 Vcc, 24 Vca, TTL (5 Vcc), 110 Vca, 220 Vca, etc..
Entradas Discretas
La estructura típica de una entrada discreta puede separarse en varios bloques por donde pasará la señal, hasta convertirse en un 0 o un 1 lógico para la CPU. Estos bloques son:
Rectificador: En el caso de una entrada de corriente alterna, convierte la señal en continua. En el caso de una señal de corriente continua, limita o impide daños por inversión de polaridad.

Entradas Discretas
Acondicionador de señal: Elimina ruidos eléctricos, detecta los niveles de señal para los que conmuta el estado lógico (umbral en on-off), y lleva la tensión al nivel manejado por la CPU.
Entradas Discretas
Indicador de estado: En general se dispone de un indicador luminoso por canal, que está encendido mientras exista tensión en la entrada, y apagado en caso contrario. Un indicador adicional señala el correcto funcionamiento de la tarjeta, permaneciendo encendido si la tarjeta y su comunicación con la CPU no presentan fallas.
Entradas Discretas
Aislamiento: Las entradas de la mayor parte de los PLC’s son opto aisladas para que, en caso de sobre tensiones externas, el daño causado no afecte más que a ese punto, sin perjudicar el resto de la tarjeta ni programarse al resto de PLC.
Circuito lógico de entrada: Es el encargado de informar a la CPU el estado de la entrada cuando ésta la interrogue.

Salidas Discretas Al igual que en el caso de las
entradas discretas, la estructura típica de una salida discreta puede separarse en varios bloques por donde pasará la señal, hasta convertirse en un 0 o un 1 lógico para la CPU. Estos bloques son:

Salidas Discretas
Circuito lógico de salida: Es el receptor de la información enviada por la CPU.
Aislamiento: Cumple una función análoga a la aislación de una tarjeta de entradas discretas.

Salidas Discretas Indicador de estado: generalmente se
utiliza un indicador de estado por canal, que se enciende cuando la salida está cerrada, y se apaga cuando está abierta. Un indicador adicional señala el correcto funcionamiento de la tarjeta, permaneciendo encendido si la tarjeta y su comunicación con la CPU no presentan fallas.
Salidas Discretas
Circuito de conexión: Es el elemento de salida a campo, que maneja la carga conectada por el usuario. Como veremos luego, se dispone de tres opciones de circuitos de conexión: transistor, triac y relé.

Salidas Discretas Protección: Puede consistir en un fusible
en serie con los contactos de salida, una protección electrónica por sobrecarga, o circuitos RC (resistivos-capacitivos), para eliminar picos generados por la naturaleza de la carga, en el caso de que ésta sea inductiva y la alimentación sea en corriente continua.

Entradas Analógicas La principal tarea de una tarjeta de
entrada analógica es precisamente la de convertir un valor analógico en un número de formato binario, por medio de un conversor A/D.
Una entrada analógica con un conversor de 8 bits podrá dividir un rango de 4 a 20 mA. en 256 valores. En cambio, con un conversor de 12 bits, tendrá que dividir el rango en 4096 valores. A lo anterior se le denomina Resolución.

Entradas Analógicas Se define justamente como Resolución al
mínimo cambio que un conversor puede discriminar en su entrada.
En la estructura de una entrada analógica podemos distinguir las siguientes partes básicas:
Protección: Impide daños al módulo y al resto del PLC por conexión con polaridad invertida o fuera del rango permitido.

Entradas Analógicas Filtro Analógico: Elimina posibles ruidos
que ingresen por la instalación. Básicamente consiste en un filtro pasabajos, que permite que las señales de baja frecuencia lleguen al conversor A/D, evitando el paso de las señales de alta frecuencia.
Multiplexado: Esta etapa consiste en un selector que envía un canal de entrada por vez al conversor A/D.
Entradas Analógicas
Conversor A/D: Es el encargado de transformar la señal analógica en un número binario interpretable por la CPU.
Aislación: En algunos equipos se dispone de opto-aisladores luego de conversor A/D, para separar la CPU del campo.
Entradas Analógicas Buffer: Memoria donde se almacenan los
valores que provienen del conversor, mientras éste opera sobre los demás canales. Aquí es donde la CPU lee los valores numéricos convertidos.
Las señales de entrada pueden ser por tensión o por corriente; en este último se utiliza una resistencia calibrada donde se mide la caída de tensión. Los valores comunes de señal son 4 a 20 mA., 1 a 5 Vcc, -5 a +5 Vcc ó 0 a 10 Vcc.

Salidas Analógicas El concepto básico de funcionamiento es
inverso al de una entrada analógica. Aquí la CPU emite un número binario a través del bus de datos, que debe convertirse en una señal analógica de corriente o de tensión.
Para las salidas analógicas valen las mismas consideraciones sobre resolución y exactitud explicadas para las entradas analógicas.

Salidas Analógicas A diferencia del módulo de entradas
analógicas, es frecuente que en el de salida analógica se disponga de un conversor D/A por canal.
Los módulos de salidas analógicas ofrecen 2, 4 ú 8 canales, en tensión o en corriente. La composición en bloques de un módulo de salida analógica incluye:

Salidas Analógicas
Buffer: Memoria donde la CPU escribe los valores binarios a convertir por el conversor, mientras éste opera sobre los demás canales.
Aislación: Optoaislación para separar la CPU del campo.
Salidas Analógicas Conversor D/A: Es el encargado de
transformar el número binario enviado por la CPU en una señal analógica.
Protección: Se encarga de impedir daños al módulo por conexión con polaridad invertida o fuera del rango permitido.
Entradas / Salidas BCD Muchos PLC’s pueden interpretar como
números BCD (Binary Coded Decimal) las señales presentes en grupos de entradas discretas, o decodificar valores numéricos desde la CPU y convertirlos en un número BCD en salidas discretas. En la codificación BCD, cada cifra del sistema es representada por un número binario de cuatro cifras, desde 0000 (en correspondencia con el 0), hasta el 1001 (en correspondencia con el 9).

Entradas / Salidas BCD Esto permite conectar al PLC dispositivos
tales como llaves BCD, teclados de ingresos de datos y displays que utilicen esta codificación.
Para la implementación de E/S del tipo BCD pueden utilizarse módulos de E/S discreta, con una adecuada programación, o módulos especiales diseñados para este fin.

Entradas / Salidas Especiales Dentro del sistema de E/S de un PLC
se pueden instalar módulos dedicados a tareas especiales que no pueden ser resueltas eficientemente por la CPU. Así es que podemos encontrar algunos módulos denominados especiales, como los siguientes:

Entradas / Salidas Especiales
Entradas de termocuplas: incluye un microprocesador para linealización de la señal de entrada, y una junta fría para compensación.
Entradas de RTD: Incluye un microprocesador para linealización de la entrada.

Entradas / Salidas Especiales
Entrada de pulsos de alta velocidad: El tiempo que le insume a la CPU resolver el programa del usuario hace que ésta no pueda leer pulsos de alta velocidad. Estos módulos poseen un procesador dedicado a esta función y pueden dar señales al campo y a la CPU al alcanzar valores prefijados.

Módulos Inteligentes Con el objeto de descargar a la CPU
de tareas que le insumen un tiempo que no es aceptable, o para las que ésta no está preparada, se dispone de módulos inteligentes.
Algunos de estos módulos cuentan con sus propias E/S, mientras que otros aprovechan la estructura de E/S que ofrece el PLC.
Módulos Inteligentes Los módulos inteligentes poseen un
procesador propio que funciona en forma asincrónica con el de la CPU. Ambos procesadores intercambian datos a través de la capacidad del módulo inteligente de leer y escribir ciertas posiciones de la memoria de la CPU principal. En algunos casos, la cantidad de datos que un módulo inteligente puede intercambiar con la CPU principal está limitada por el diseño del módulo.

Módulos Inteligentes Algunos de estos módulos inteligentes son:Módulo BASIC: Programable en lenguaje
BASIC, posee uno o varios puertos de comunicación RS-232 ó RS-422.
Módulo PID: Este módulo resuelve uno o varios lazos PID en forma separada de la CPU principal. La configuración de os lazos se efectúa desde la CPU principal o directamente a través de un puerto RS-232 ó RS.422 que el módulo posee.

Módulos Inteligentes
Módulo ASCII: Almacenan mensajes que pueden emitirse a través de sus puertos de comunicaciones por orden del programa de la CPU principal.Módulo de posicionamiento: Es una combinación de un módulo contador de alta velocidad con salida para motores. Se utilizan para resolver lazos de posicionamiento en aplicaciones de control numérico o robótica.

Módulos Inteligentes
Módulo computador integrado: Son verdaderas computadoras, con teclado, pantalla, impresoras, conexión en red y almacenamiento masivo (ya sea en los clásicos discos rígidos o en disco RAM que emulan un disco rígido utilizando memoria RAM).Módulos de comunicación: Son módulos inteligentes especialmente dedicados a tareas de comunicación.
Unidad Central de Procesos (CPU) La CPU (Central Processing Unit) es la
unidad principal de coordinación de todas las funciones o recursos de los distintos procesadores periféricos, procesador de I/O, procesador de comunicaciones, unidad de memoria y fuente da alimentación.
La CPU de un PLC está compuesta por dos partes fundamentales: el procesador y la memoria. Pueden contener también otros elementos, como puertos de comunicación, o incluso la fuente de alimentación.

Unidad Central de Procesos (CPU)

Fuente de alimentación
Es la unidad encargada de suministrar los voltajes requeridos por la CPU, tarjetas especiales, procesadores periféricos y los módulos de E/S local.
Existen 2 tipos de fuentes: internas y externas.
Procesador de Entradas y Salidas El procesador de I/O es el encargado de
administrar el flujo de datos de lectura desde las celdas de entrada hacia la unidad central de procesos (CPU), y los datos de escritura desde la CPU hacia las celdas de salida, es decir realiza una interfase entre la CPU y las celdas que contienen los módulos de I/O, ya sean éstos locales o remotos.
La figura siguiente muestra en forma esquemática el procesador de I/O y su entorno.
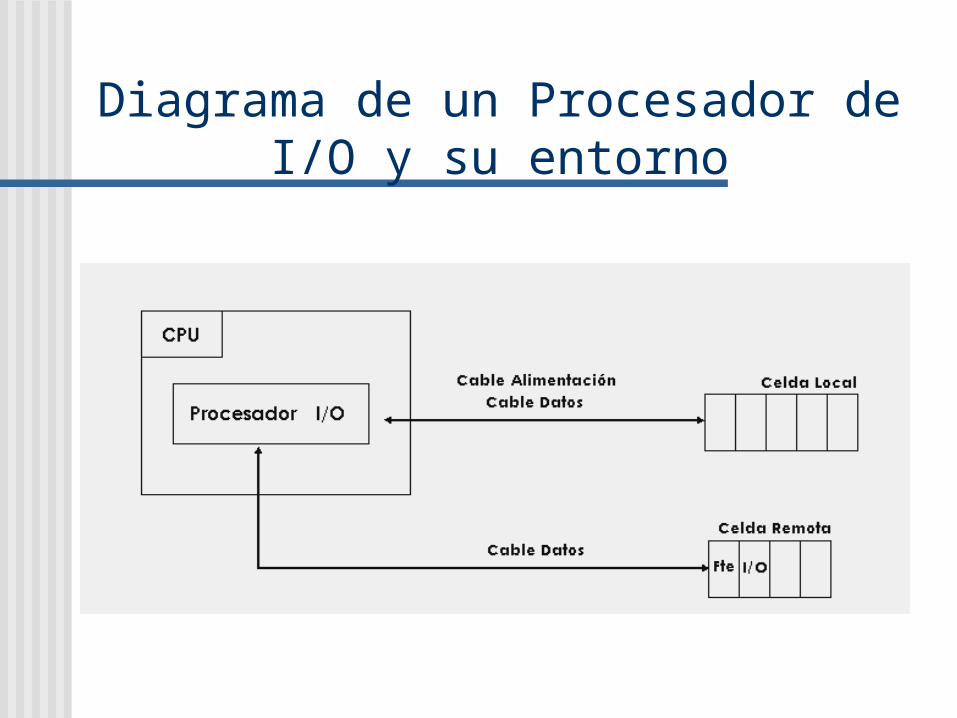
Diagrama de un Procesador de I/O y su entorno
Procesador de Comunicaciones El procesador de comunicaciones, es el
encargado de proporcionar la interfase física y lógica de comunicación requerida, como también administrar el flujo de datos desde y hacia la CPU con os equipos periféricos conectados a los puertos de comunicación.
En el caso de los PLC’s Modicon, proporcionan típicamente 2 interfases:
Procesador de Comunicaciones
Interfase Serial RS-232 en protocolo Modbus: Destinada a operar como interfase de configuración, programación y monitoreo de la aplicación del PLC a través de un computador con software Modsoft, Lmodsoft o supervisor de PLC Factory Link u otros.
Interfase de red del tipo RS-422 en protocolo Modbus Plus (MB+): Destinada a la implementación de una red local de control industrial (LAN).
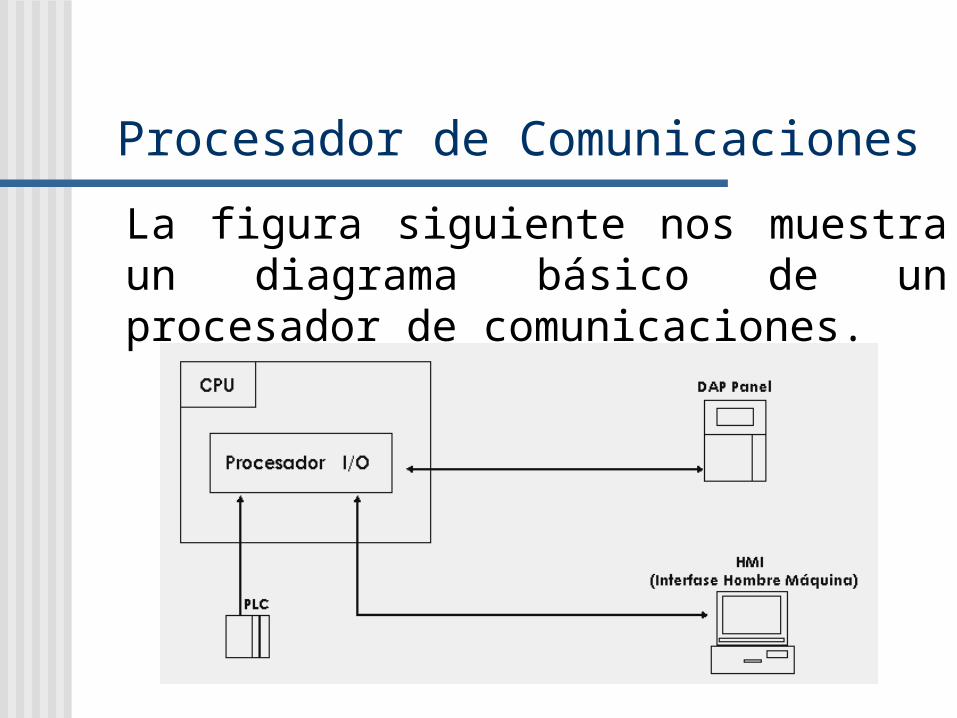
Procesador de Comunicaciones
La figura siguiente nos muestra un diagrama básico de un procesador de comunicaciones.

Procesador
El procesador tiene como tarea principal ejecutar el programa de aplicación escrito por el usuario. También cumple con otras tareas importantes, como ser la de administrar las tareas de comunicación y ejecutar programas de autodiagnóstico.
Los PLC’s más sencillos poseen un solo procesador, pero en la medida que su capacidad de control aumenta pueden tener varios procesadores dedicados a tareas específicas como resolución de lazos, comunicaciones, diagnósticos, etc..
Procesador Las tareas asignadas al procesador
son ejecutadas por éste secuencial incesantemente mientras el equipo está conectado a la alimentación. Esta secuencia se denomina Barrido o Scan.
Una secuencia típica de Barrido o Scan se muestra a continuación:

Procesador Consultar el estado de las entradas y
almacenar éstos estados en la memoria. Resolver el programa de aplicación. Atender las comunicaciones con módulos
inteligentes. Atender las comunicaciones de los puertos
de la CPU. Ejecutar un auto diagnostico. Actualizar las salidas a partir de los
resultados almacenados en la memoria. Volver a empezar el ciclo. El tiempo que
necesita el procesador para llevar a cabo éste ciclo se denomina tiempo de Barrido o Scan time.

Memoria Es la encargada de almacenar la
aplicación de control, los datos calculados o asignados, funciones básicas y el Firmware ejecutivo del sistema.
La unidad de memoria se compone de dos partes, una RAM (CMOS RAM), y una memoria ROM.
La memoria RAM es la porción de memoria donde se almacena la configuración del sistema, la aplicación, los datos calculados y los prefijados.

Memoria La memoria RAM puede ser dividida de la
siguiente forma: RAM de Estado (State RAM), que almacena todos los datos o valores de las variables programadas y configurables. RAM de Usuario (Usser Logic), que contiene todo el programa de aplicación. Típicamente la configuración del sistema ocupa entre 800 y 1500 palabras de memoria, dependiendo de la cantidad de Drops y módulos de I/O.
Memoria La memoria total de un equipo tiene
distintas zonas en las que se almacenan datos:
Área de programas de aplicación o memoria de usuario
Registro de E/S discretas Registro de E/S analógicas Registro de temporizadores y contadores Registro de variables Área auxiliar (Scratch pad) Sistema Operativo

Descripción del SOFTWARE El Software propiamente tal de un
controlador programable lo conforma su set de instrucciones, pero antes de conocer éste set de instrucciones, veremos un punto que se asocia con el Software, este es, la capacidad de memoria.

Descripción del SOFTWARE
Capacidad de Memoria. Recordemos que las tareas (las cuales llamaremos “programas”) que se desea que realice el controlador programable quedan almacenadas en una unidad llamada memoria, por lo tanto, de lo anterior se desprende que el tamaño del programa que puede resolver un controlador programable estará directamente relacionado con la capacidad de memoria de éste.
Descripción del SOFTWAREUtilización de Memoria.El programa lógico ingresado, se almacena en la memoria de usuario en sucesivas palabras de memoria.La lógica se almacena siguiendo el número de la red, con la red del número más bajo en las direcciones de memoria más bajas.Cada elemento de la red (contacto, bobina) hace uso de una palabra de memoria, los contadores y temporizadores hacen uso de dos palabras de memoria, las funciones aritméticas y otras, hacen uso de tres palabras de memoria y las conexiones verticales, por cada columna, hacen uso de una palabra de memoria.

Descripción del SOFTWARE
A modo de ejemplo ¿cuánta cantidad de memoria ocupa la siguiente red de la figura?

Determinación de palabras de memoria utilizada: Columna 1: El elemento A hace
uso de una palabra de memoria.Columna 2: El elemento B hace uso de una palabra de memoria.Columna 3: El elemento C hace uso de una palabra de memoria. La conexión Vertical necesita una palabra de memoria.
Determinación de palabras de memoria utilizada: Columna 4: Cada elemento D, E, F necesita una palabra de memoria, además para indicar que el elemento E no comienza en la 1ª columna se hace uso de una palabra de memoria, lo mismo ocurre con el elemento F.Columna 5: Cada elemento G, H e I necesita una palabra de memoria.

Determinación de palabras de memoria utilizada: Columna 6: El elemento J necesita una palabra de memoria, el temporizador necesita dos palabra de memoria y la conexión vertical necesita una palabra.Columna 7: El elemento K necesita una palabra de memoria.Columna 8: El elemento L necesita una palabra de memoria.

Determinación de palabras de memoria utilizada: Columna 9: No necesita memoria.
Columna 10: No necesita memoria.Columna 11: Cada elemento M y N necesita una palabra de memoria.
Como podemos ver, se utilizarán para la red del ejemplo 21 palabras de memoria.

Set de instrucciones
Contactos (N.O.; N.C.) Bobinas (Standard, Retentiva) Temporizador (1 segundo; 0,1
segundo; 0, 01segundo)Contadores(Crecientes, Decreciente)Funciones aritméticas en simple
precisión (4 dígitos), (Suma, Resta, Multiplicación, División)

Set de instrucciones
Funciones aritméticas en doble precisión (8 dígitos)(Suma, Resta, Multiplicación, División)
Extracción de raíz cuadrada decimal
Extracción de raíz cuadrada de procesos
Set de instrucciones
Obtención de Logaritmo Obtención del Antilogaritmo
Algoritmos PID
Contactos transicionales (ON-OFF; OFF-ON)
Movimientos (Registro a Tabla, Tabla a Registro, Tabla a Tabla, Bloques)

Set de instrucciones
Operaciones lógicas(AND, OR, XOR, Complemento, Comparación, Modificar bits, Sensar bits, Rotaciones izquierda-derecha)
Función de saltoRead, Write (manejo de puestas ASCII)
Asignación de Direcciones Puesto que en un programa lógico
existirán una serie de contactos, bobinas y registros, se hace necesario que a cada uno de ellos se le asigne un “nombre”, pero considerando que a un controlador programable es una unidad electrónica se hace más conveniente asignarle a cada elemento o registro un número en lugar de un nombre, el cual consistirá de una cifra de 5 dígitos.

Asignación de Direcciones De los cinco dígitos que componen
la asignación de dirección de cada elemento o registro, el primero de ellos (dígito izquierdo) indica que tipo de elemento o registro es.
A este número se le llama dirección. Para el PLC Modicon, sólo existen 4 tipos de direcciones:

Asignación de Direcciones
0xxxx: Dirección de salidas digitales, bobinas físicas y contactos referidos a bobinas
1xxxx: Dirección de entradas digitales o de contactos referidos a entradas discretas
3xxxx: Dirección de entradas Analógicas
4xxxx: Dirección para registros de almacenamiento internos y salidas analógicas
Dirección 0xxxx Dirección de las salidas digitales, bobinas
de programa y de comunicación. Este tipo de dirección sólo puede ser
asociado a bobinas.
A continuación se nombrarán los tipos posibles de bobinas en un programa lógico:

Tipos de Bobinas
Bobinas físicas I/O Map: Se define como física a todas las bobinas que tengan una tarjeta de salida asociada en el I/O Map., y por ende que realicen una acción directa sobre dispositivos de terreno.Bobinas Internas: Son aquellas que no tienen una tarjeta de salida asociada y por ende son utilizadas principalmente en programación.

Tipos de Bobinas
Bobina de comunicación:Definidas como direcciones de memoria, donde se encuentran todas las posiciones utilizadas en el proceso de comunicación entre el programa y los periféricos de supervisión, intercambiando datos digitales tales como alarmas, estatus, comandos de operación y reconocimiento.
NOTA: Estas bobinas no deben ser ocupadas en el diagrama escalera como bobinas.

Dirección 1xxxx Dirección de memoria donde se
ubican todas las entradas de tipo digital (ON-OFF). Estas señales vienen siempre desde los dispositivos de terreno como señales de voltaje en los rangos de +/- 24 Vdc., 0 a 120 Vac., 0 a 230 Vac., TTL, etc..
Dirección 3xxxx Dirección de memoria donde se ubican
todas las entradas de tipo análogo. Esta dirección ocupa siempre una palabra de memoria para su almacenamiento. Vienen siempre desde los dispositivos de terreno como señales de: +/- 20 mA., 4-20 mA., 1-5 Vdc., +/- 10 Vdc., etc..
Las señales de tipo análogo son convertidas a través de un conversor A/D, formándose una palabra binaria de 11 bits más un presigno, con un equivalente de 0 a 4095 cuentas para el rango a convertir.

Dirección 4xxxx Dirección de memoria que es
utilizada para referenciar los registros Holding para cálculos y resultados tales como Timers, Contadores, Funciones Matemáticas, Bloques PID, etc..

Dirección 4xxxx La dirección 4XXXX es utilizada como
salidas analógicas que a partir de 0000 a 4095 cuantas generan en módulos de salidas 4-20 mA., +/- 5 Vdc., +/- 10 Vdc..
Adicionalmente, la dirección 4xxxx puede ser ocupada como un registro Holding para lectura o escritura a través de la comunicación Modbus o Modbus Plus (MB+).

Conversión de Diagrama Escalonado Serie a Lenguaje del Controlador
(lenguaje escalera) El lenguaje de programación que
utilizan los controladores programables de denomina “LADDER DIAGRAM” (Diagrama Escalera), el cual es muy similar al diagrama convencional de relé.
Con el objeto de familiarizarse con el Diagrama Escalera, se entregan a continuación una serie e ejemplos de conversión.

Ejemplos

Programación del PLC
Para poder realizar esta programación son necesaria dos herramientas: Conocimiento de los alcances de cada una de las instrucciones y dominar el uso de la consola de programación.

Formato de programación Él o los programas del usuario son
introducidos usando un formato “Multi-nodal” como lo muestra la figura siguiente:

Formato de programación
Este conjunto de 77 nodos (11 x 7) lo llamaremos “RED” o “NETWORK”, dentro de esta red se programa la lógica del usuario, donde contactos y bobinas ocupan 1 nodo, temporizadores y contadores ocupan 2 nodos y cálculos aritméticos y otros ocupan 3 nodos; en una red se admite cualquier mezcla entre los elementos nombrados anteriormente.
Solución de la lógica El controlador lee las entradas del
segmento, realiza un BARRIDO o SCAN de toda la lógica programada perteneciente al segmento, y luego de acuerdo a ella actualiza las salidas del segmento.
En cuanto al desarrollo de la lógica, ésta se realiza por red, donde la primera red del segmento es la primera en solucionarse, luego la segunda y así sucesivamente hasta llegar a la última red del segmento para continuar luego con la solución del siguiente segmento, o bien como lo indique el segment scheduler.

Solución de la lógica Es importante hacer notar que las redes se
resuelven sucesivamente de acuerdo con su orden numérico y NO de acuerdo al orden numérico asignado a sus bobinas.
La solución de cada red comienza con el elemento ubicado en la fila 1 y columna 1, luego se resuelven en orden todos los elementos de la columna 1, luego la columna 2 y así hasta el elemento ubicado e la columna 11 fila 7, pasándose luego a resolver la siguiente red y así sucesivamente.

Solución de la lógica Los resultados o estados obtenidos en la primera red
están inmediatamente disponibles para ser usados en la segunda red, o cualquiera de las siguientes, y así con todas las redes. La figura siguiente nos resume lo antes señalado.

Solución de la lógica Respecto a las bobinas, puede ser
ubicada en la columna número 11 o después del último elemento dispuesto en la línea correspondiente. Lo anterior se verá más claro si nos referimos a la figura siguiente y a su comentario posterior.

Solución de la lógica
Veamos el comentario

Solución de la lógicaComentario:
Para efectos del desarrollo de la lógica, la bobina 00033 se encuentra ubicada en la columna 6 (fila 1) y la bobina 00036 se encuentra ubicada en la columna 3 (fila 2), por lo tanto, si seguimos el recorrido del SCAN que nos muestra la figura, nos damos cuenta que la bobina 00036 se resuelve en la columna 3, por lo tanto su estado estará disponible para ser usado en la columna 4 o siguientes, por lo que el contacto normal cerrado ubicado en la fila 1 columna 5 con referencia 00036, tomará el estado que le ordene la bobina 00036 que se desarrolló en la fila 2 columna 3.

Manejo de Instrucciones
En las siguientes páginas veremos la operación de los diferentes elementos o instrucciones que nos permitirán configurar una programa lógico.

Contactos y Bobinas Contactos y Bobinas son los elementos
básicos de programación. Su simbología es fácilmente asociada a la
lógica de relé convencional. Se pueden usar, a lo menos, cuatro
diferentes tipos de contacto, los cuales son: contacto normalmente abierto (N.O.), normalmente cerrado (N.C.), contacto transicional OFF – ON y contacto transicional ON – OFF. La figura siguiente muestra la simbología usada para cada uno de los contactos nombrados anteriormente.
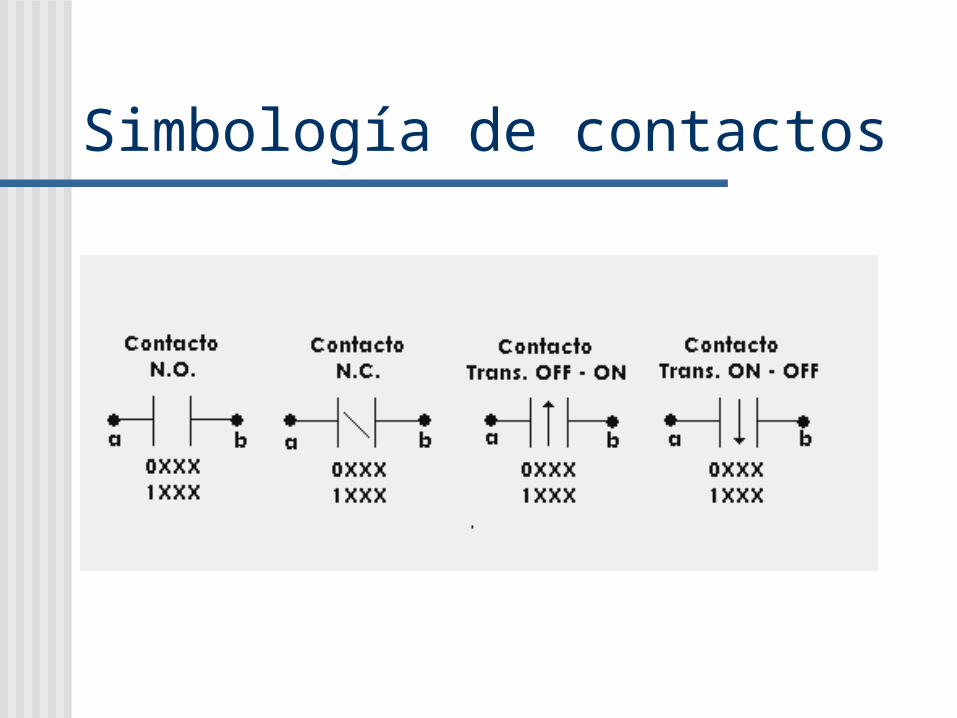
Simbología de contactos

Contactos Los contactos (de cualquier tipo),
pueden tener en su punto “b” una línea de conexión vertical, de manera de poder configurar lógica de ramas paralelas, como lo muestra a modo de ejemplo la siguiente figura.

Ramas de lógica paralela
Bobinas La bobina, como se dijo anteriormente, es
un elemento de salida, el cual estará en estado ON si las condiciones que la proceden en un programa lógico están en estado ON.
En los controladores se pueden programar dos tipos de bobinas, ellas son: normales y enclavadas (Latches), la simbología usada para cada una de ellas la muestra la figura siguiente.

Simbología de bobinas
• Cualquier bobina lógica (interna o de salida) puede ser enclavada, de manera que después de una interrupción de tensión en el controlador, ésta vuelva a su estado anterior, sea este ON u OFF.
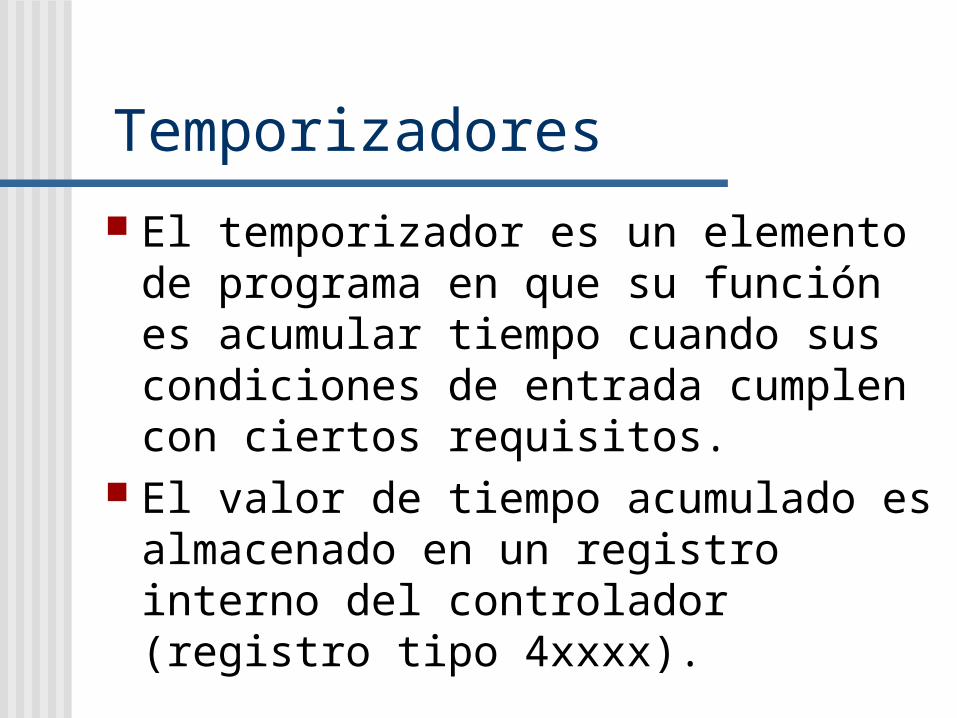
Temporizadores
El temporizador es un elemento de programa en que su función es acumular tiempo cuando sus condiciones de entrada cumplen con ciertos requisitos.
El valor de tiempo acumulado es almacenado en un registro interno del controlador (registro tipo 4xxxx).

Temporizadores Una vez que el valor almacenado
(tiempo acumulado) llega a un valor determinado (tiempo de preset) las condiciones de salida del temporizador cambian, las cuales pueden ser usadas por el usuario para generar por ejemplo: temporizadores a la energización, temporizadores a la desenergización, relojes de tiempo real, etc.
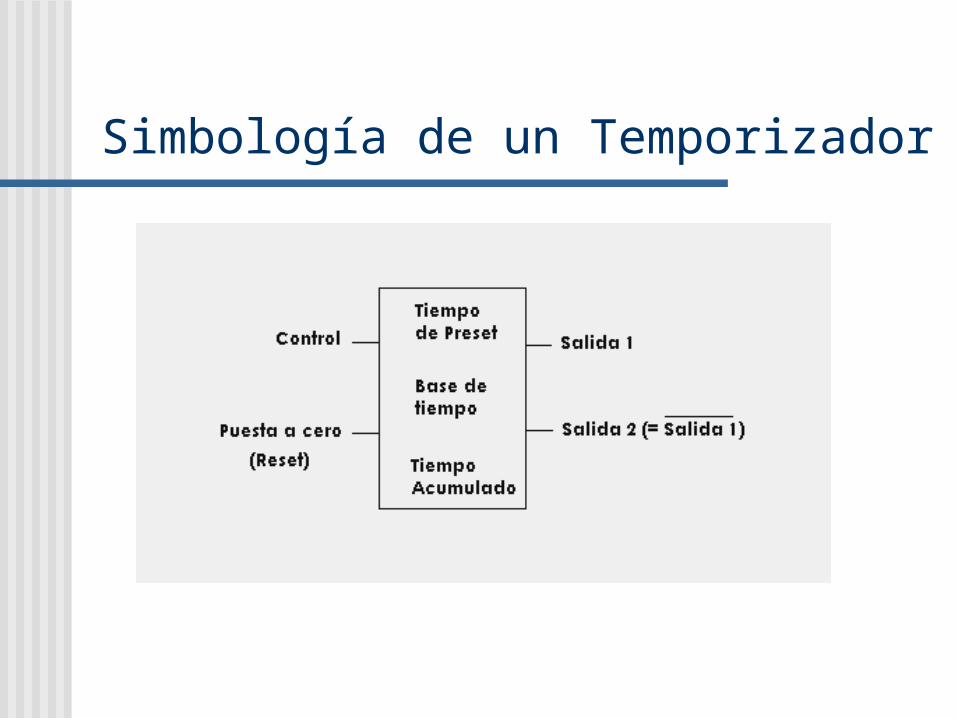
Simbología de un Temporizador
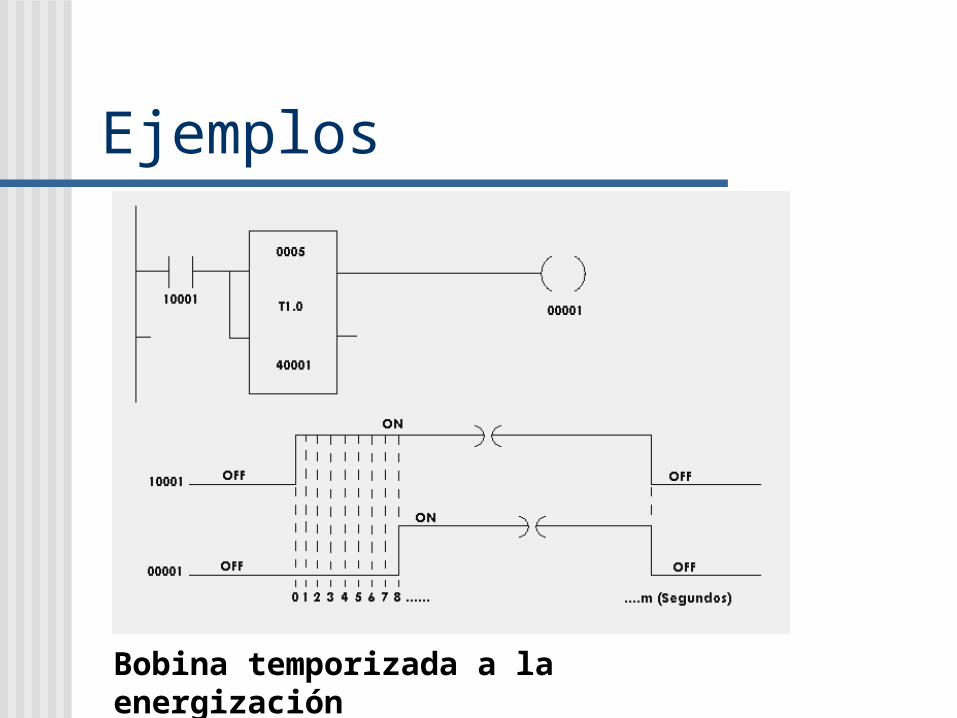
Ejemplos
Bobina temporizada a la energización

Ejemplos
Bobina temporizada a la desenergización

Contador creciente Al igual que el temporizador, el contador es
un elemento de programa en que su función es contar eventos cada vez que sus condiciones de entrada cumplan ciertos requisitos.
El número de eventos contados es almacenado en un registro interno del controlador (registro tipo 4xxxx).
Una vez que el valor almacenado (eventos contados) llegue a un valor determinado (eventos de preset), las condiciones de salidas del contador cambian, las cuales pueden ser usadas por el usuario para producir por ejemplo: alarmas, detener máquinas, etc.

Simbología de un Contador Creciente
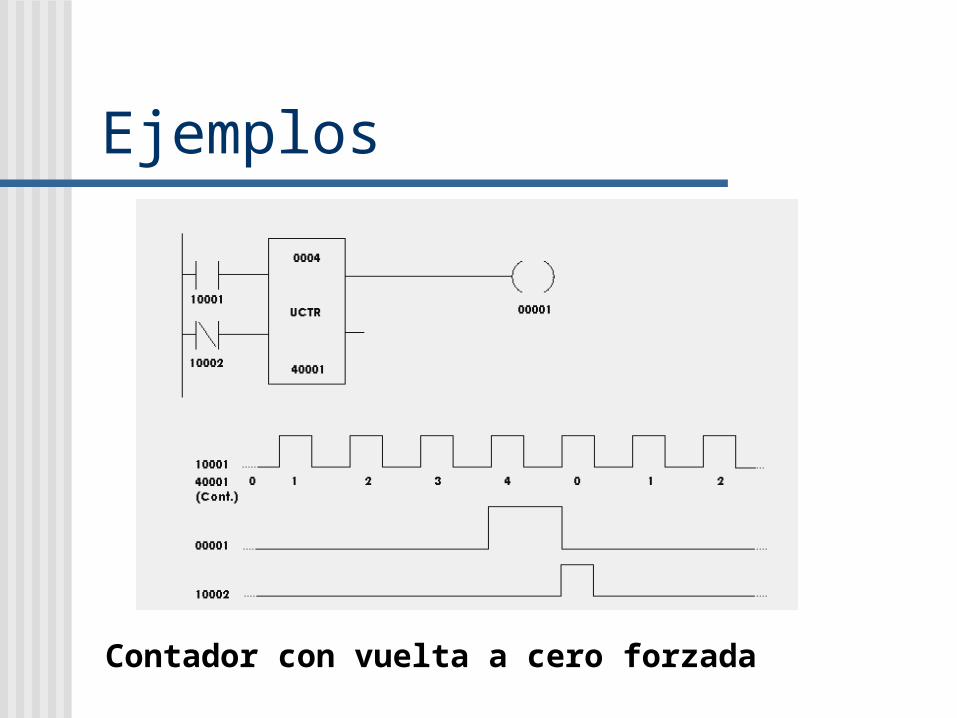
Ejemplos
Contador con vuelta a cero forzada
Ejemplos
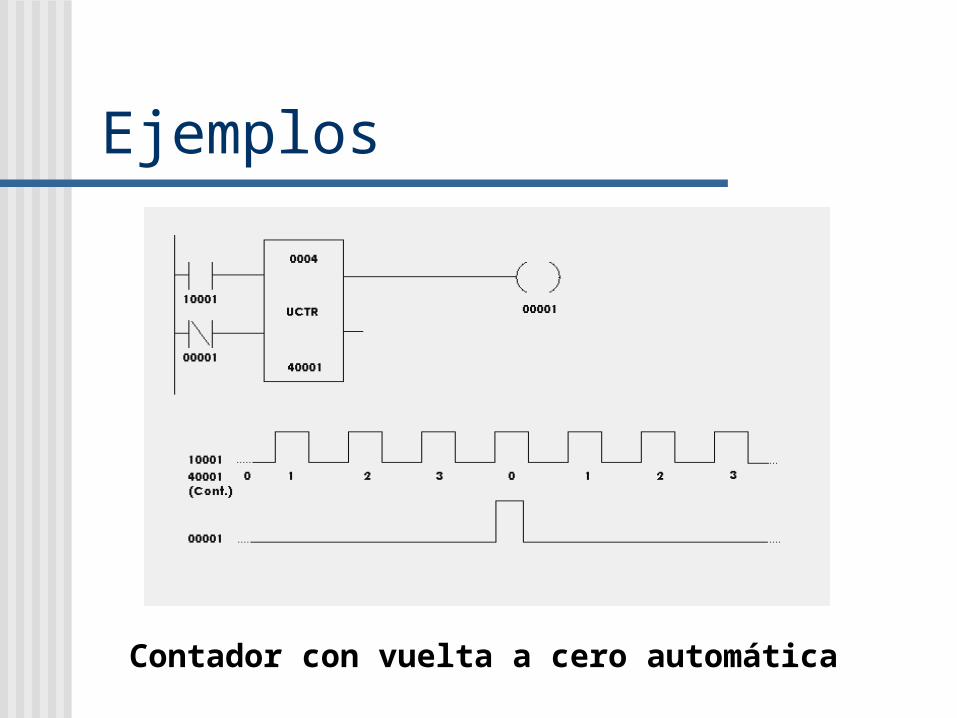
Contador con vuelta a cero automática

Contador Decreciente El contador decreciente funciona en forma
similar al contador creciente, la diferencia radica en que inicialmente en el registro que se almacenan los Eventos Contados se almacena (en forma automática) el mismo valor que se puso como Evento de Preset, y cada vez que la entrada de Control sufre una transición de OFF a ON, el registro que contiene los Eventos Contados se decrementará en una unidad, el cambio en las salidas se producirá cuando el contenido de registro de Eventos Contados llegue a cero.

Simbología de un Contador Decreciente

Funciones Aritméticas
Suma.Como su nombre lo indica, este elemento de programa realiza la suma decimal entre dos cantidades, almacenando el resultado en una posición de memoria, esto es, es un registro tipo 4XXXX.
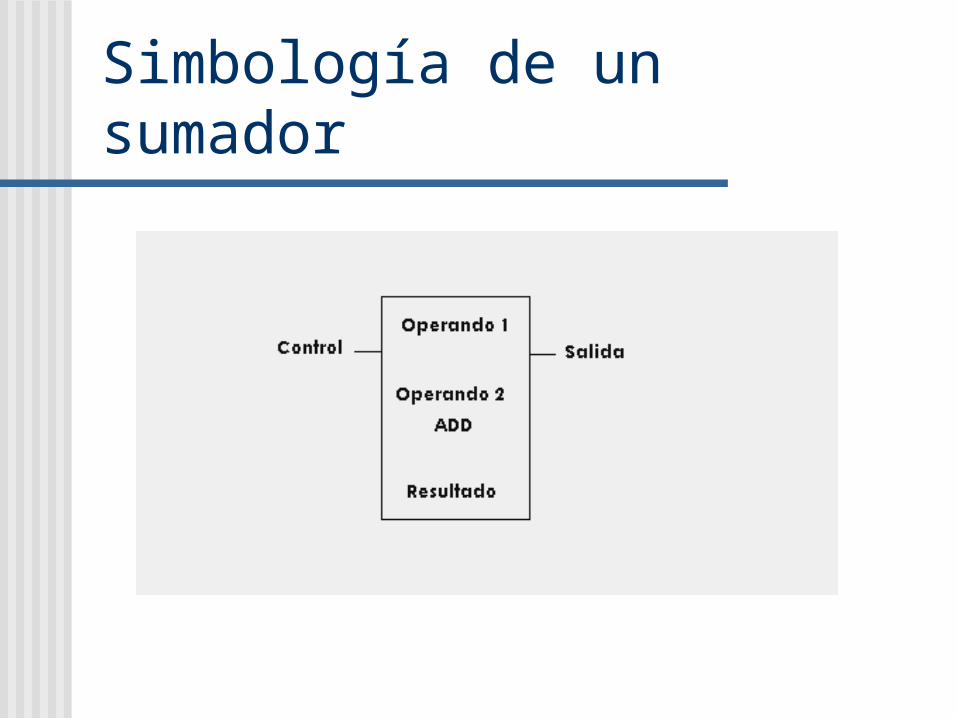
Simbología de un sumador

Ejemplo de suma con detección de Overflow
Consideremos que el contenido del registro 40001 es 7500 (40001 7500) y que el contenido del registro 40010 es 5350 (40010 5350).

Ejemplo de suma con detección de Overflow
De acuerdo a los valores anteriores tendremos: 7500 + 5350 = 12850, como se puede ver, el resultado es mayor de 9999, por lo que en el registro 40015 quedará almacenado el valor 2850, en tanto que la bobina 00001 se energizará pues ha existido condición de Overflow.

Resta
Semejante a lo visto para la Suma, este bloque realiza la diferencia de los contenidos del Operandos 1 y Operando 2, es decir, al contenido del registro del Operando 1 se le resta el contenido del registro del Operando 2, almacenándose el resultado (el valor absoluto) en un registro tipo 4XXXX.
La entrada del bloque Resta opera de igual forma que la del bloque Suma, es decir, cada vez que se energiza, la Resta se realiza.

Resta Referente a las Salidas, en este caso, se
hace uso de tres Salidas, la Superior se energizará si el Operando 1 es mayor que el Operando 2 (Resta con resultado positivo, > 0); La Salida del Medio se energizará si el Operando 1 y 2 son iguales (Resta con resultado cero = 0) y La Salida Inferior se energizará si el operando 1 es menor que el Operando 2 (Resta con resultado negativo, < 0).
Las situaciones anteriores las ilustraremos con el siguiente ejemplo

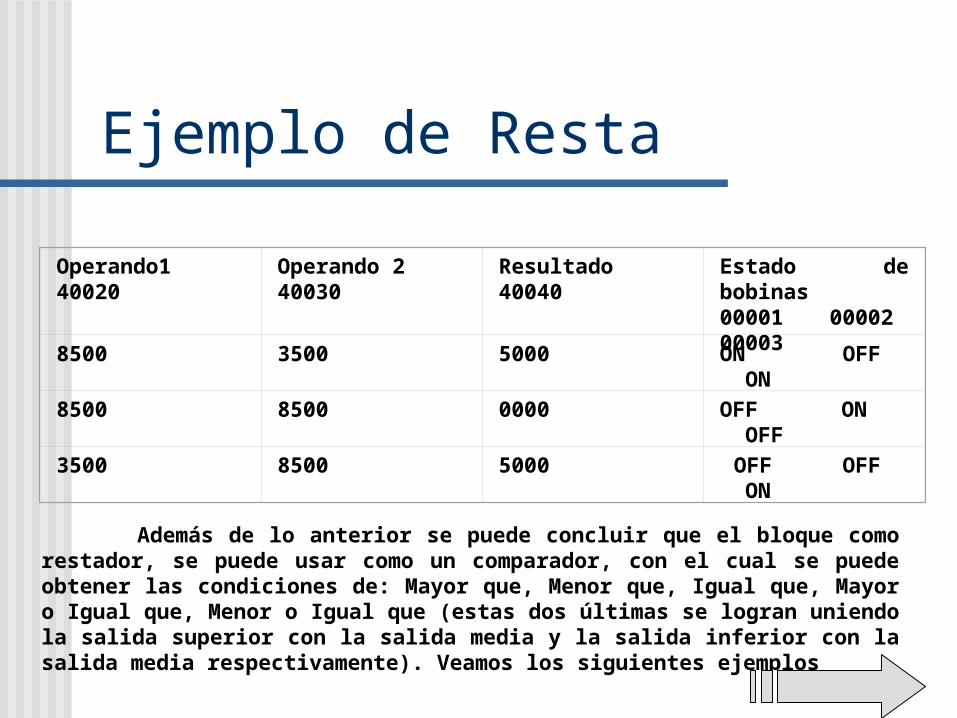
Ejemplo de Resta
considerar las siguientes situaciones
Ejemplo de Resta
Operando140020
Operando 240030
Resultado40040
Estado de bobinas00001 00002 00003
8500 3500 5000 ON OFF ON
8500 8500 0000 OFF ON OFF
3500 8500 5000 OFF OFF ON
Además de lo anterior se puede concluir que el bloque como restador, se puede usar como un comparador, con el cual se puede obtener las condiciones de: Mayor que, Menor que, Igual que, Mayor o Igual que, Menor o Igual que (estas dos últimas se logran uniendo la salida superior con la salida media y la salida inferior con la salida media respectivamente). Veamos los siguientes ejemplos
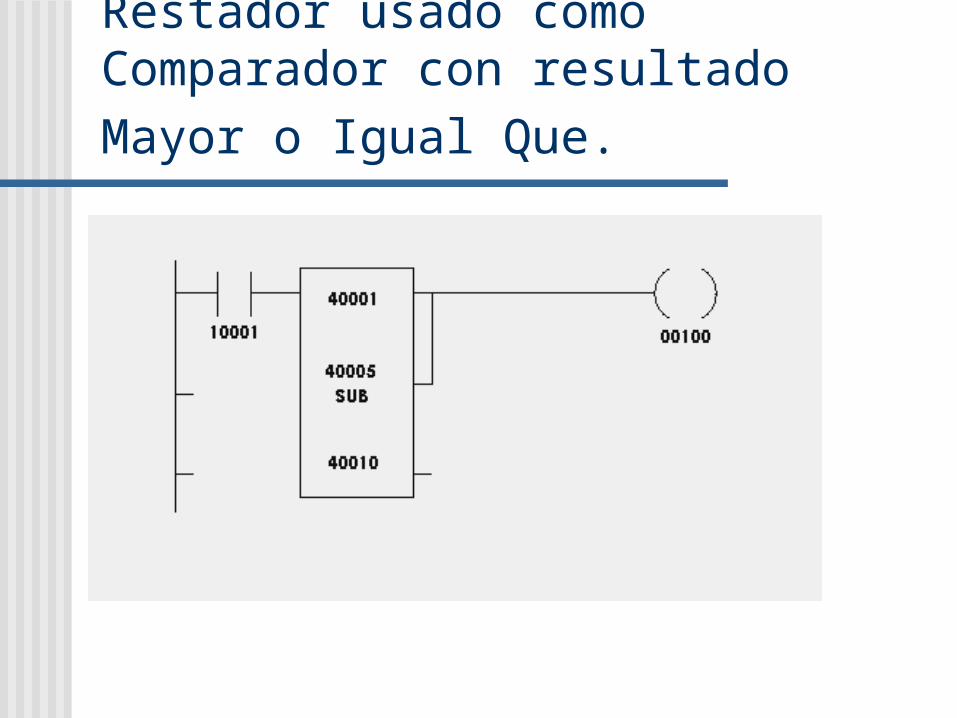
Restador usado como Comparador con resultado Mayor o Igual Que.

Restador usado como Comparador con resultado Menor o Igual Que.

Multiplicación Como su nombre lo indica, este
elemento de programa realiza la multiplicación entre dos cantidades, almacenando el resultado en dos posiciones consecutivas de memoria, esto es, en dos registros tipo 4XXXX.

Simbología de un Multiplicador
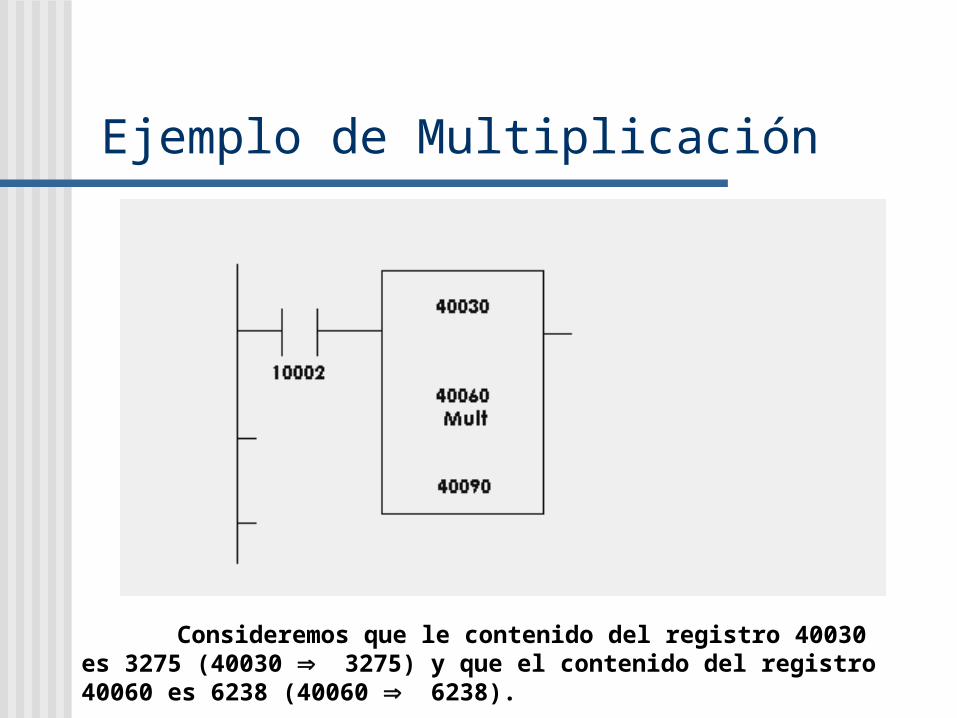
Ejemplo de Multiplicación
Consideremos que le contenido del registro 40030 es 3275 (40030 3275) y que el contenido del registro 40060 es 6238 (40060 6238).
Ejemplo de Multiplicación
Cuando la entrada del bloque sea activada, por medio del contacto N.O. 10002, se realizará la Multiplicación de los contenidos de 40030 y de 40060, depositándose el resultado en los registros 40090 y 40091.
Ejemplo de Multiplicación
De acuerdo a los valores anteriores tendremos: 3275 6238 = 20429450, este resultado se almacenará de la siguiente forma: en el registro 40090 se almacenarán los cuatro dígitos más significativos, esto es, en 40090 quedará el valor 2042, en tanto que en el registro 40091 se almacenarán los cuatro dígitos menos significativos, esto es, en 40091 quedará el valor 9450.
División
Este elemento de programa realiza la división entre dos cantidades, almacenando el resultado en dos posiciones consecutivas de memorias, esto es, en dos registros tipo 4XXXX.
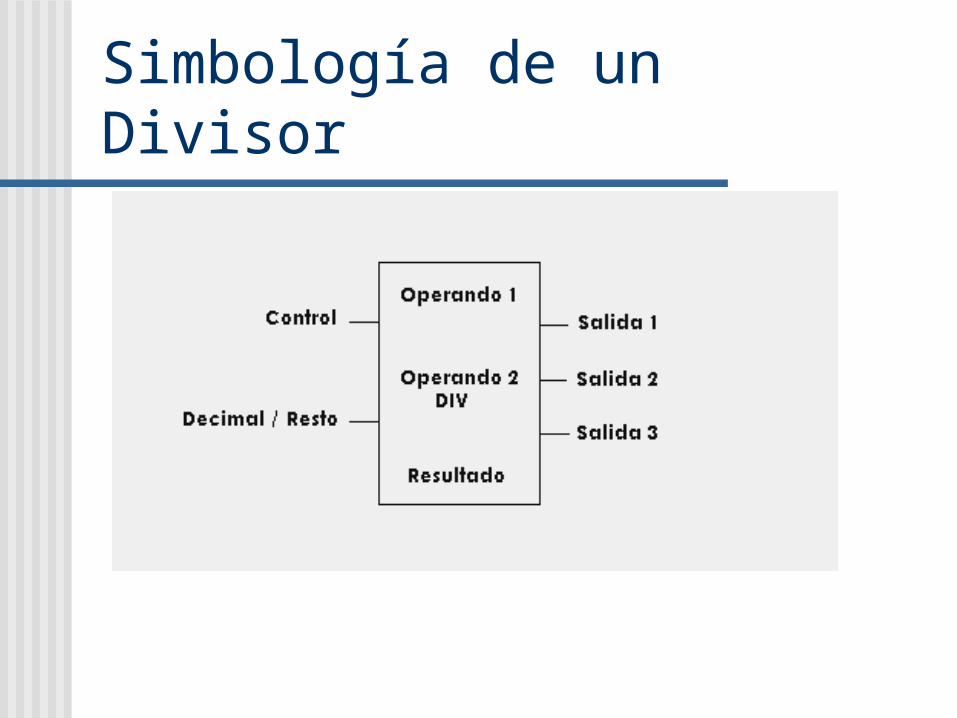
Simbología de un Divisor

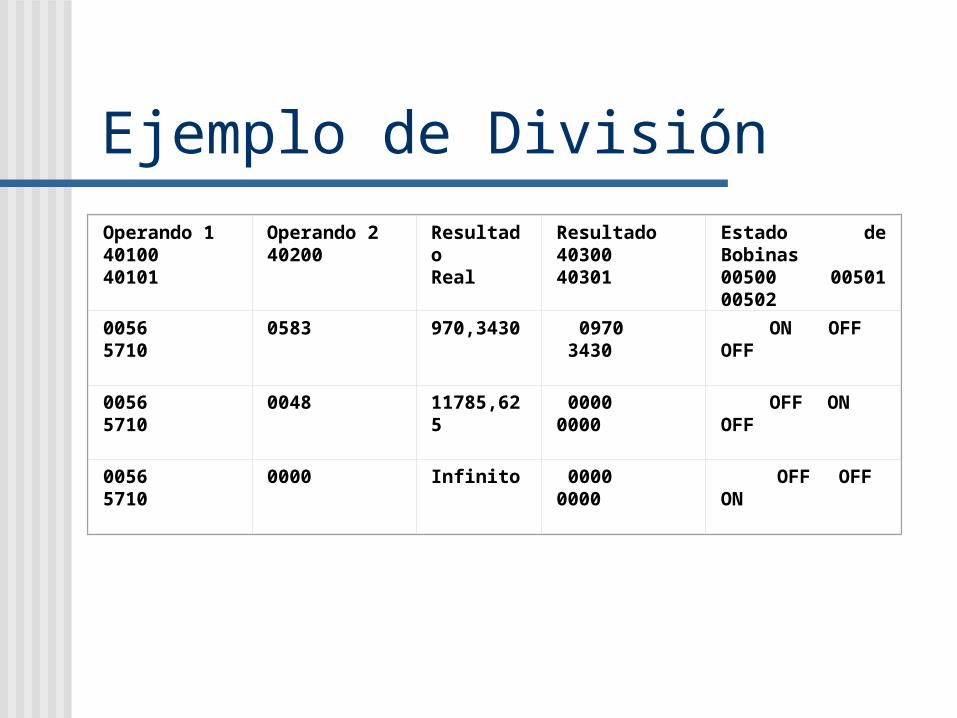
Ejemplo de División
Consideremos las siguientes situaciones
Ejemplo de División
Operando 140100 40101
Operando 240200
ResultadoReal
Resultado40300 40301
Estado de Bobinas00500 00501 00502
0056 5710 0583 970,3430 0970 3430 ON OFF OFF
0056 5710 0048 11785,625 0000 0000 OFF ON OFF
0056 5710 0000 Infinito 0000 0000 OFF OFF ON

Movimientos de registro
Estas funciones permiten que valores numéricos contenidos en registros de entrada, salidas o internos sean trasladados o movidos a otros registros. Los valores no se modifican, sólo se trasladan.

Movimientos de registro
Es importante señalar que cuando se usan señalar discretas (ON – OFF) como parte de alguna instrucción de movimiento, estas señales ON – OFF se consideran en grupos de 16 señales, siendo la primera referencia válida a usar aquellas que sean divisibles por 16 y resto 1, por ejemplo: 00001, 00017, 00033, ....., 10001, 100017, 10033, ....., etc..
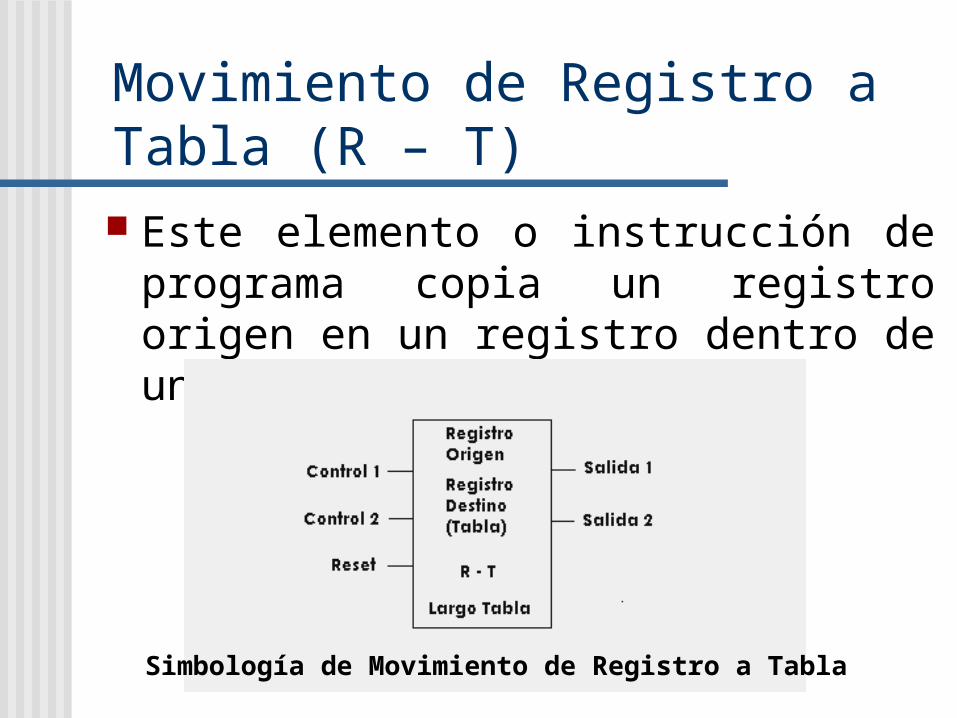
Movimiento de Registro a Tabla (R – T) Este elemento o instrucción de
programa copia un registro origen en un registro dentro de una tabla.
Simbología de Movimiento de Registro a Tabla

Esquema de instrucción R - T

Ejemplo de instrucción R - T
Consideremos los siguientes valores en los registros ANTES de que la instrucción se ejecute:

Ejemplo de instrucción R - T
30001 = 3721 (Registro Origen)
40010 = 0003 (Puntero)
40011 = 0087
40012 = 1356
40013 = 4006
40014 = 0524
40015 = 2701
Tabla Destino

Ejemplo de instrucción R - T
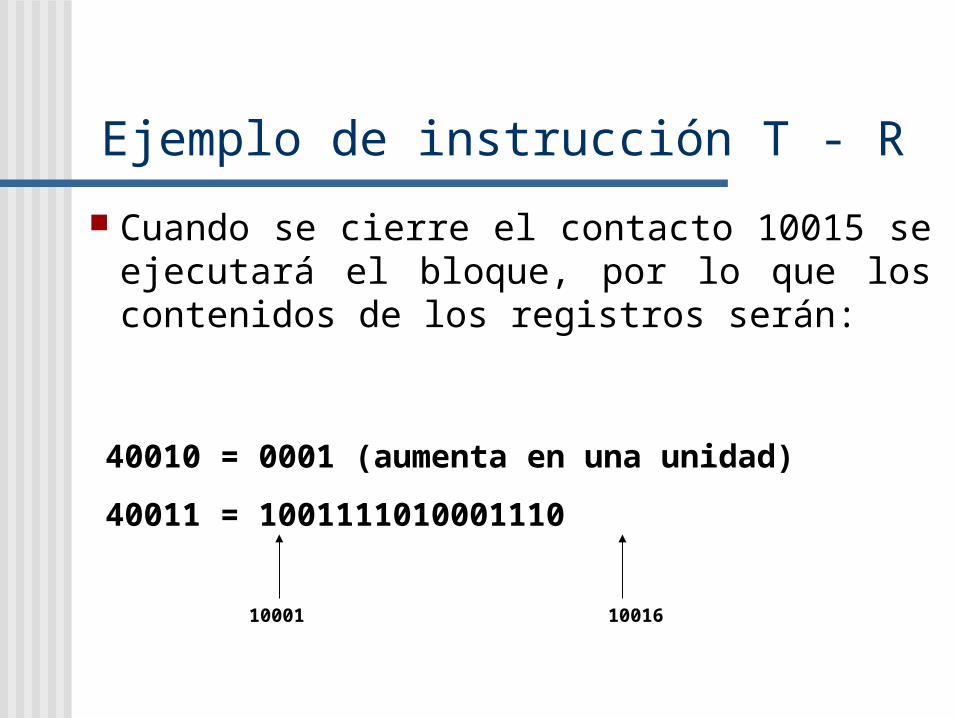
• Cuando se cierre el contacto 10015, se ejecutará el bloque, por lo que los contenidos de los registros serán:
30001 = 3721
40010 = 0004 (Aumento en una unidad)
40011 = 0087
40012 = 1356
40013 = 4006
40014 = 3721 (Modificó su valor por el que tenía el registro 30001)
40015 = 2701

Movimiento de Tabla a Registro (T – R)
Este elemento o instrucción de programa copia un registro perteneciente a una tabla en otro registro denominado destino.
La instrucción de programa copia un registro perteneciente a una tabla en otro registro denominado destino.

Simbología de movimiento Tabla a Registro

Esquema de instrucción T - R
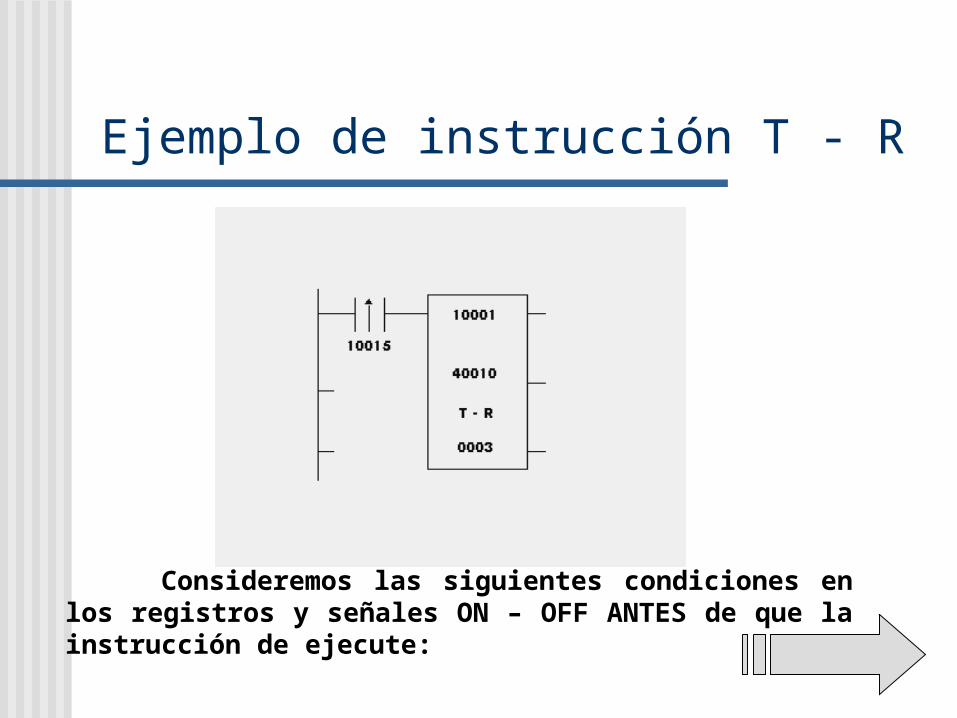
Ejemplo de instrucción T - R
Consideremos las siguientes condiciones en los registros y señales ON – OFF ANTES de que la instrucción de ejecute:

Ejemplo de instrucción T - R
10001: ON
10002: OFF
10003: OFF
10004: ON
10005: ON
10006: ON
10007: ON
10008: OFF
10009: ON
10010: OFF
10011: OFF
10012: OFF
10013: ON
10014: ON
10015: ON
10016: OFF
40010 = 0000 (Puntero)
40011 = 0000000000000000 (registro destino en formato binario)
Ejemplo de instrucción T - R
Cuando se cierre el contacto 10015 se ejecutará el bloque, por lo que los contenidos de los registros serán:
40010 = 0001 (aumenta en una unidad)
40011 = 1001111010001110
10001 10016

Movimiento de Tabla a Tabla
Este elemento o instrucción de programa en cierta forma conjuga las dos instrucciones vistas anteriormente (R – T, T – R).
Esta instrucción copia un registro perteneciente a una tabla origen en otro registro perteneciente a una tabla destino.
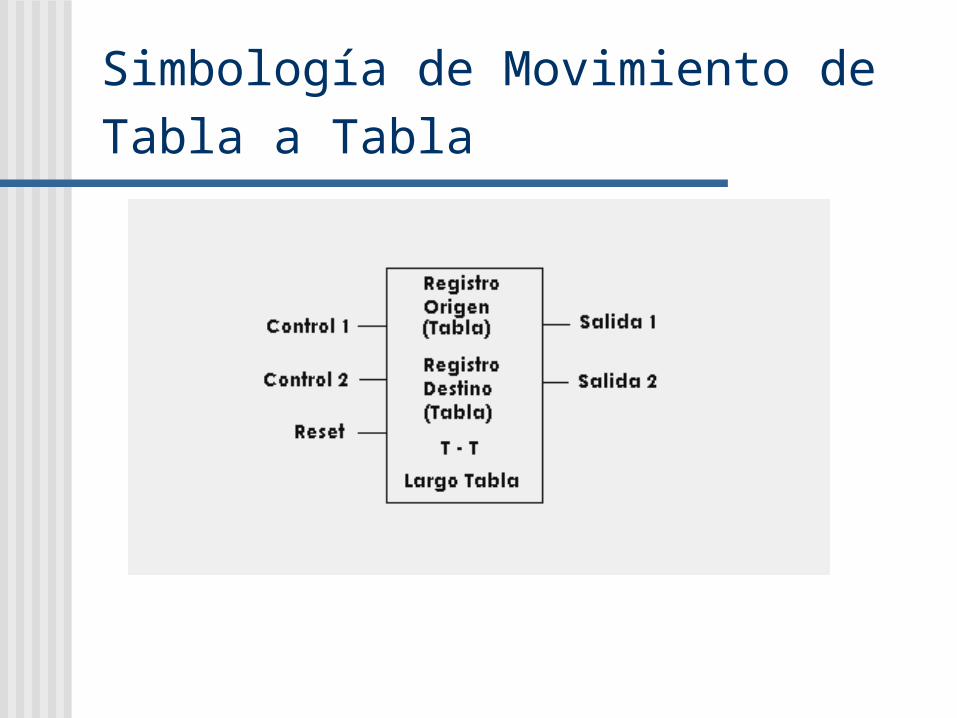
Simbología de Movimiento de Tabla a Tabla

Esquema de instrucción T - T

Ejemplo de instrucción T -T
Sean los siguientes contenidos de los registros ANTES de que la instrucción se ejecute:

Ejemplo de instrucción T -TTabla Origen
30010 = 2380
30011 = 1927
30012 = 4056
30013 = 0891
40100 = 0002 (Puntero)
Tabla Destino
40101 = 0008
40102 = 1526
40103 = 0068
40104 = 0000
Cuando se cierre en contacto 10015 se ejecutará el bloque, por lo que los contenidos de los registros serán:

Ejemplo de instrucción T -T30010 = 2380
30011 = 1927
30012 = 4056
30013 = 0891
40100 = 0003 (Aumenta en una unidad)
40101 = 0008
40102 = 1526
40103 = 4056 (Modificó su valor por el que tenía 30012)
40104 = 0000

Movimiento de Bloques Este elemento o instrucción es muy
similar al movimiento de tabla a tabla, la diferencia es que en este caso no se hace uso de puntero.
Esta instrucción copia una tabla de origen completa en otra tabla destino en un solo scan.
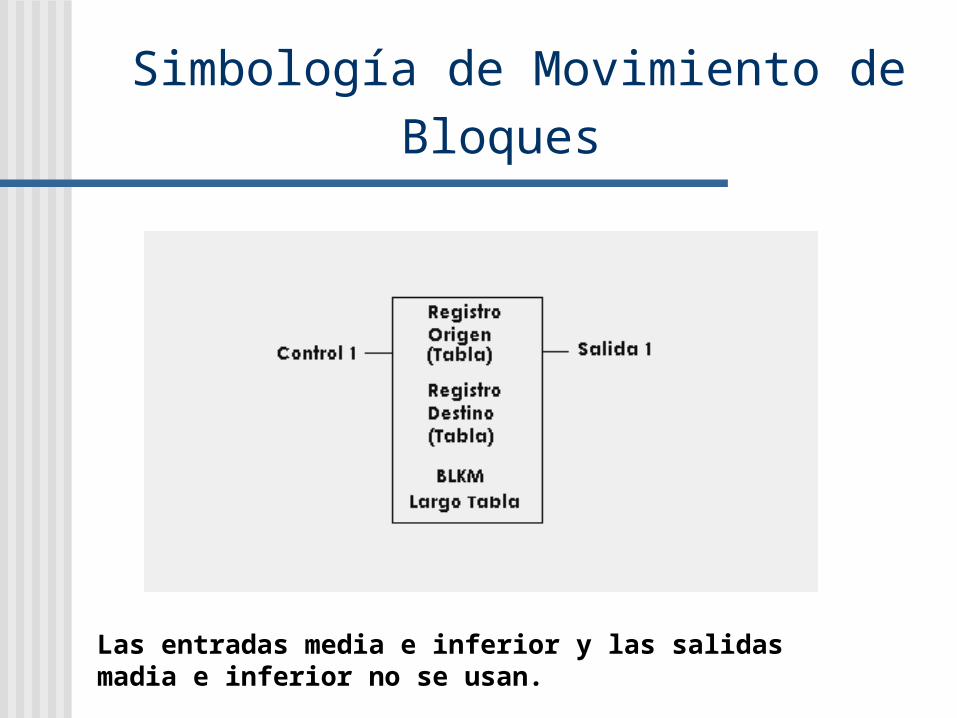
Simbología de Movimiento de Bloques
Las entradas media e inferior y las salidas madia e inferior no se usan.

Esquema de instrucción BLKM
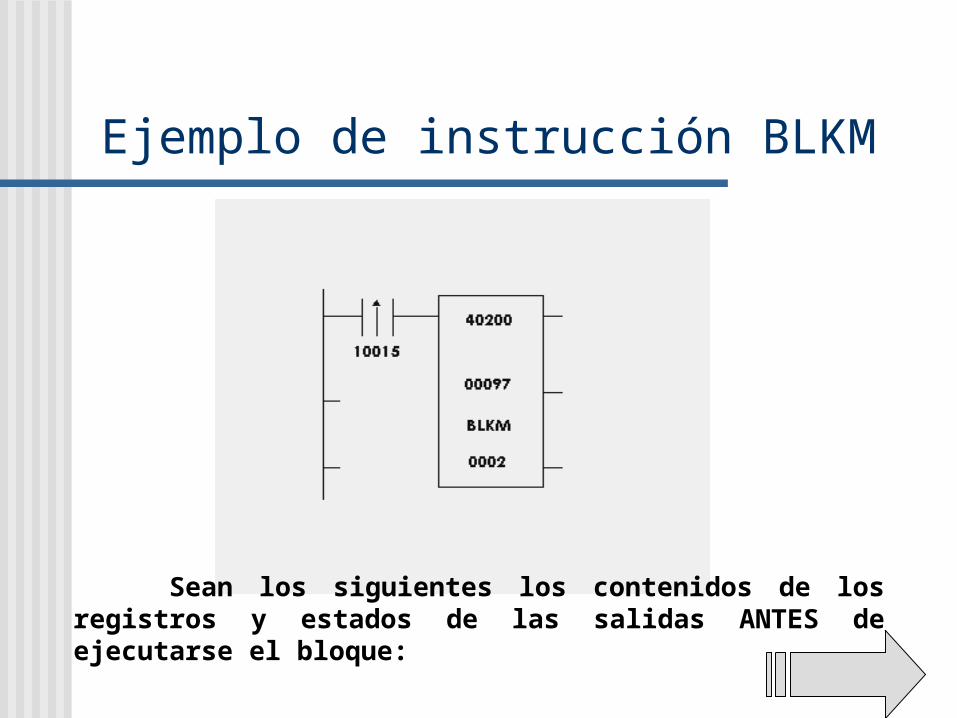
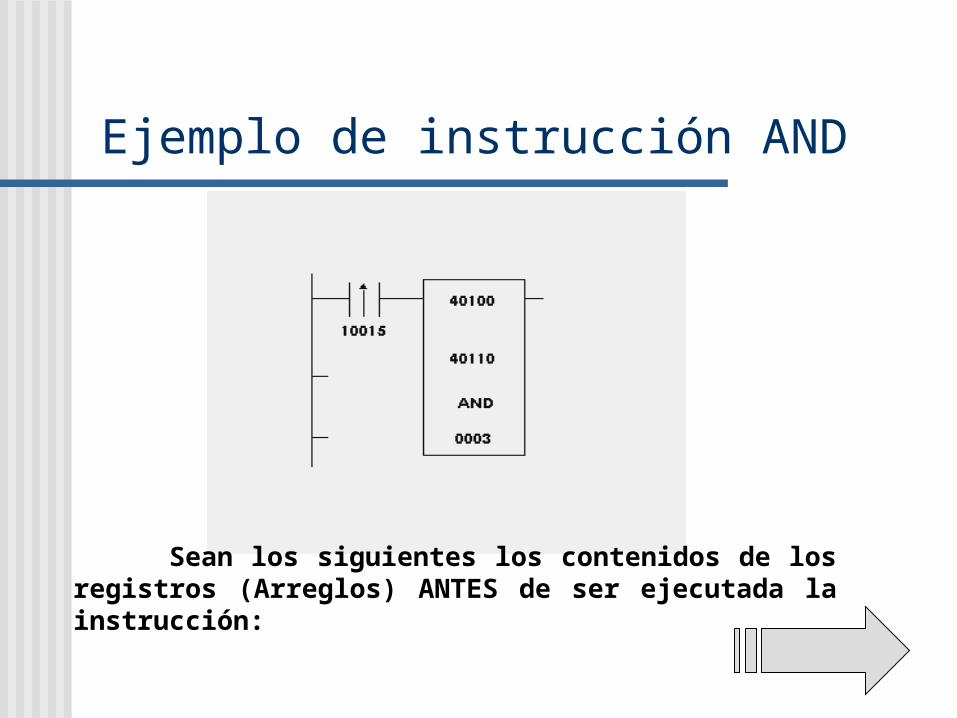
Ejemplo de instrucción BLKM
Sean los siguientes los contenidos de los registros y estados de las salidas ANTES de ejecutarse el bloque:

Ejemplo de instrucción BLKM
40200 = 1110010110000111 (Notación binaria)
40201 = 0101011110110100 (Notación binaria)
00097 = ON
00098 = OFF
00099 = OFF
00100 = ON
00101 = OFF
00102 = OFF
00103 = ON
00104 = ON
00105 = OFF
00106 = ON
00107 = OFF
00108 = ON
00109 = OFF
00110 = ON
00111 = OFF
00112 = OFF
00113 = OFF
00114 = OFF
00115 = OFF
00116 = OFF
00117 = ON
00118 = ON
00119 = ON
00120 = OFF
00121 = OFF
00122 = ON
00123 = OFF
00124 = ON
00125 = OFF
00126 = OFF
00127 = ON
00128 = ON
Cuando se cierre el contacto 10015 se ejecutará el bloque, por lo que los estados de las salidas ON – OFF serán:
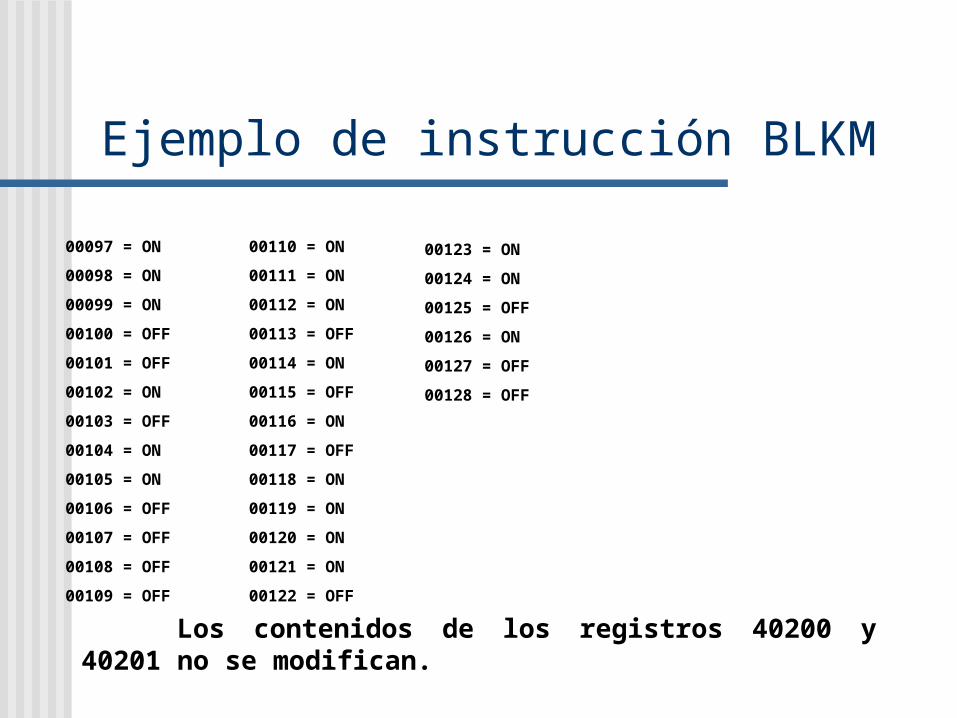
Ejemplo de instrucción BLKM
00097 = ON
00098 = ON
00099 = ON
00100 = OFF
00101 = OFF
00102 = ON
00103 = OFF
00104 = ON
00105 = ON
00106 = OFF
00107 = OFF
00108 = OFF
00109 = OFF
00110 = ON
00111 = ON
00112 = ON
00113 = OFF
00114 = ON
00115 = OFF
00116 = ON
00117 = OFF
00118 = ON
00119 = ON
00120 = ON
00121 = ON
00122 = OFF
00123 = ON
00124 = ON
00125 = OFF
00126 = ON
00127 = OFF
00128 = OFF
Los contenidos de los registros 40200 y 40201 no se modifican.
Instrucciones lógicas El set de instrucciones que
comenzaremos a estudiar permiten al usuario manejar información bit a bit; Estudiaremos operandos lógicos tales como AND, OR, XOR, etc..
Antes de comenzar a ver cada una de las funciones nombradas enunciaremos algunos puntos básicos que son comunes en todas ellas.

Instrucciones lógicas
Las instrucciones lógicas trabajan en base a arreglos de bits, donde el arreglo más pequeño está formado por 16 bits (1 arreglo tipo 4XXXX). El arreglo más grande que se puede manejar en forma directa es de 1600 bits (100 registros tipo 4XXXX).
Un arreglo está formado por 1 o más registros consecutivos.

Instrucciones lógicas
Cada bit dentro de un arreglo tiene un número asignado, siendo el bit número1 el de más a la izquierda.
La siguiente figura muestra un número de bit asignado a cada uno de los bits que componen un arreglo de 3 registros.

Arreglo formado por 3 registros.
Cada bit dentro de un arreglo puede tomar el valor cero (0) ó uno (1). Cada bit dentro de un arreglo tiene un correspondiente valor decimal tal como se indica a continuación:

Bit V/S Valor DecimalBit Valor
1 32768
2 16384
3 8192
4 4096
5 2048
6 1024
7 512
8 256
9 128
10 64
11 32
12 16
13 8
14 4
15 2
16 1
• Por ejemplo el arreglo 0001011001111011 equivale al valor decimal 5755 (4096 + 1024 + 512 + 64 + 32 + 16 + 8 + 2 + 1).

Función lógica AND Esta función realiza la operación lógica AND
entre 2 arreglos y deposita el resultado en el segundo arreglo. Este operando se aplica bit a bit de cada arreglo, es decir, se realiza la operación AND entre el bit 1 del primer arreglo con el bit 1 de segundo arreglo, el bit 2 de primer arreglo con el bit 2 del segundo arreglo, y así sucesivamente hasta llegar al último bit del arreglo.
Recordemos que en una operación lógica AND, resultado es 1 si ambos bits son 1 y será cero en los otros casos.

Simbología de la función AND
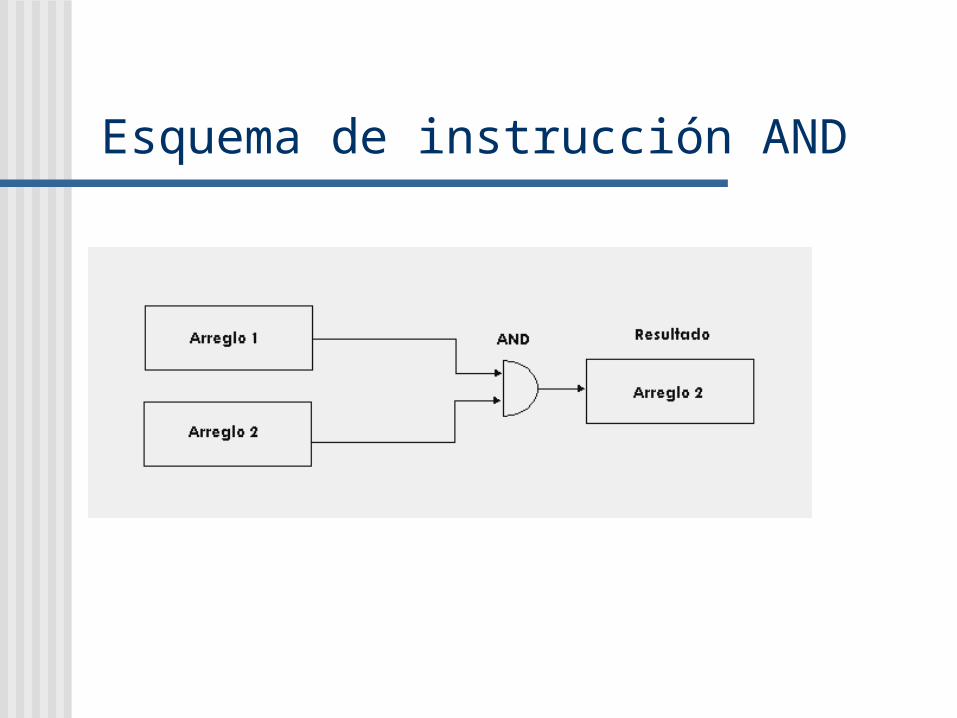
Esquema de instrucción AND
Ejemplo de instrucción AND
Sean los siguientes los contenidos de los registros (Arreglos) ANTES de ser ejecutada la instrucción:

Ejemplo de instrucción AND
Arreglo 1 1010100011110110 1010110011000001 101111000110101140100 40101 40102
40110 40111 40112
Cuando se cierre el contacto 10015 (entrada de Control), se ejecutará la instrucción AND, y el contenido de los registros será el siguiente:
Arreglo 1 1010100011110110 1010110011000001 1011110001101011
40100 40101 40102
40110 40111 40112
(Resultado)
Arreglo 2 1001001111101010 0000011110011101 1111100000111001
Arreglo 2 1000000011100010 0000010010000001 1011100000101001

Función lógica OR Esta función realiza la operación lógica OR
entre 2 arreglos y deposita el resultado en el segundo arreglo. Este operando se aplica bit a bit de cada arreglo, es decir, se realiza la operación OR entre el bit 1 del primer arreglo con el bit 1 de segundo arreglo, el bit 2 de primer arreglo con el bit 2 del segundo arreglo, y así sucesivamente hasta llegar al último bit del arreglo.
Recordemos que en una operación lógica OR, el resultado es 1 si cualquiera de los dos bits es 1 y será cero cuando ambos sean cero.
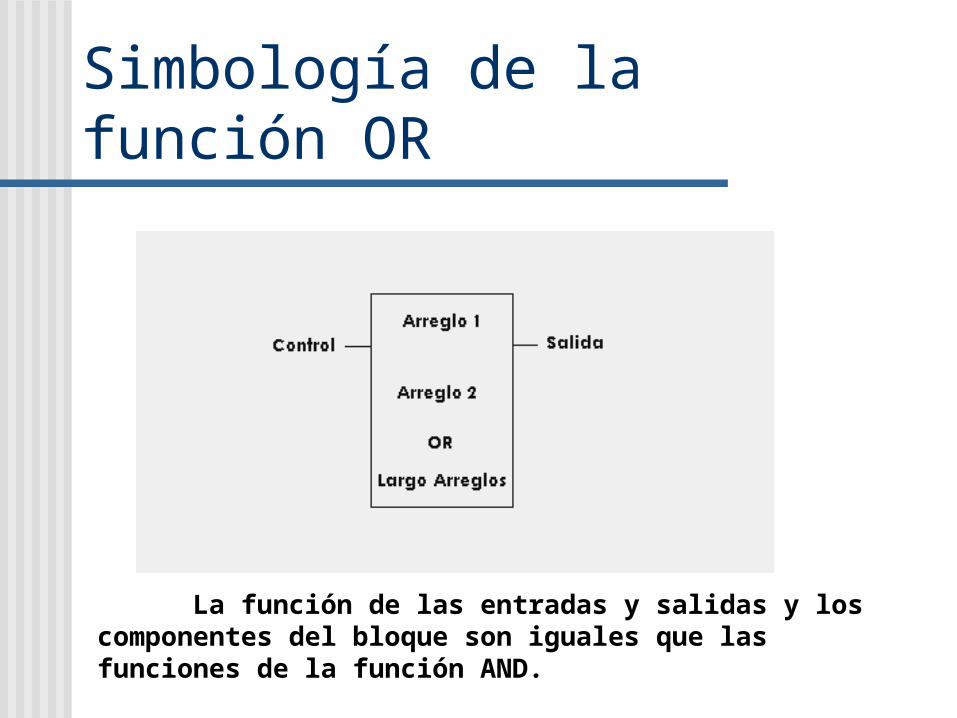
Simbología de la función OR
La función de las entradas y salidas y los componentes del bloque son iguales que las funciones de la función AND.
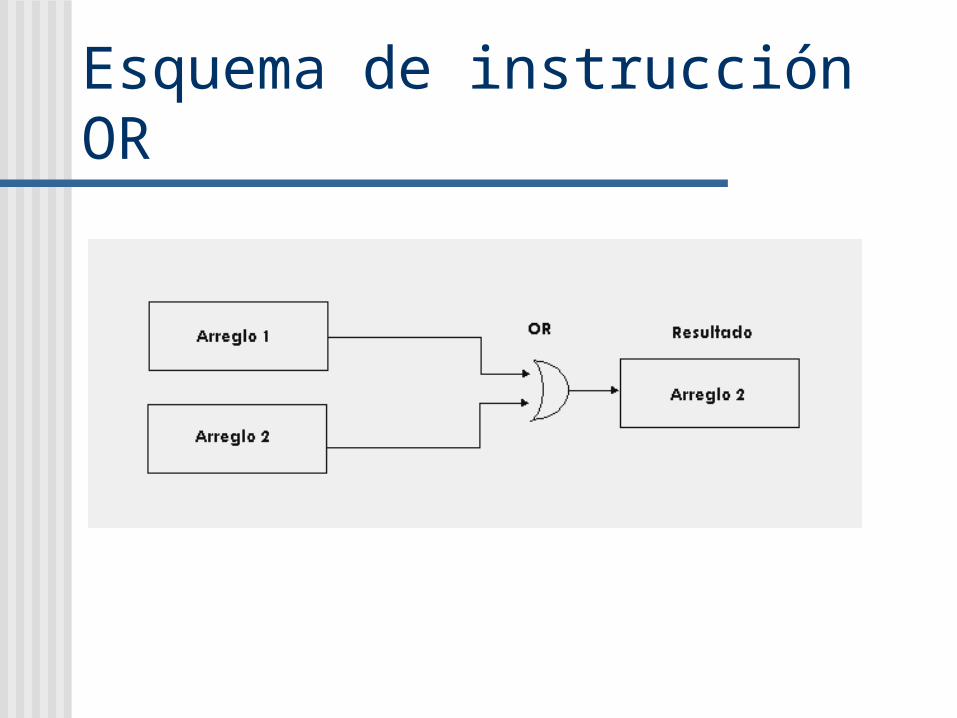
Esquema de instrucción OR

Ejemplo de instrucción OR
Sean los siguientes los contenidos de los registros (Arreglos) ANTES de ser ejecutada la instrucción:

Ejemplo de instrucción OR
Arreglo 1 1001100011100101 0110011001101010
10033 10048 10049 10064
00065 00080 00081 00096
Cuando se cierre el contacto 10015 (entrada de Control), se ejecutará la instrucción OR, y el contenido de los registros será el siguiente:
Arreglo 2 0001011100110010 0111010101001010

Ejemplo de instrucción OREjemplo de instrucción OR
Arreglo 1 1001100011100101 0110011001101010
10033 10048 10049 10064
00065 00080 00081 00096
(Resultado)
Arreglo 2 1001111111110111 0111011101101010
Función XOR Esta función realiza la operación lógica XOR
(OR Exclusivo) entre 2 arreglos y deposita el resultado en el segundo arreglo. El operador se aplica bit a bit de cada arreglo, es decir, se realiza la operación XOR entre el bit 1 del primer arreglo con el bit 1 de segundo arreglo, el bit 2 de primer arreglo con el bit 2 del segundo arreglo, y así sucesivamente hasta llegar al último bit del arreglo.
Recordemos que en una operación lógica XOR, resultado es 1 si SOLAMENTE UNO de los bits de 1 y será cero si AMBOS bits son cero o AMBOS bits son 1.
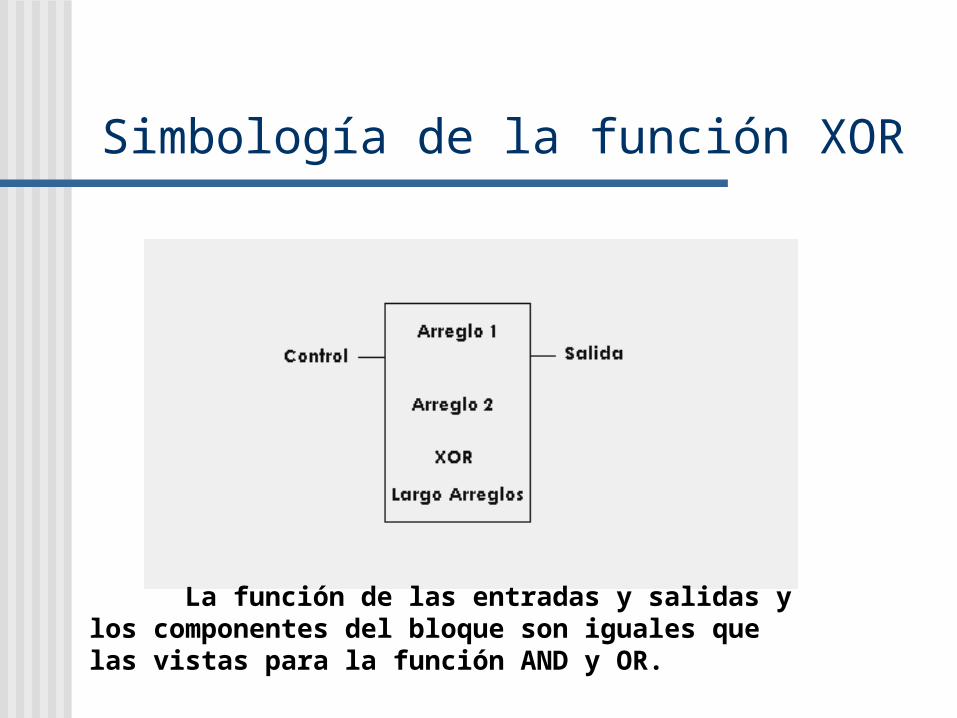
Simbología de la función XOR
La función de las entradas y salidas y los componentes del bloque son iguales que las vistas para la función AND y OR.

Esquema de instrucción XOR

Ejemplo de instrucción XOR
Sean los siguientes los contenidos de los registros (Arreglos) ANTES de ser ejecutada la instrucción:

Ejemplo de instrucción XOR
Arreglo 1 0011100110001110 0011110101000101
Arreglo 2 1011010011100101 1100101010100110
00129 00144 00145 00160
40526 40527
Cuando se cierre el contacto 10015 (entrada de Control), se ejecutará la instrucción OR, y el contenido de los registros será el siguiente:

Ejemplo de instrucción XOR
Arreglo 1 0011100110001110 0011110101000101
Arreglo 2 1000110101101011 1111011111100011
00129 00144 00145 00160
40526 40527
(Resultado)

Función lógica SENS
La función lógica SENS examina y reporta el estado de un bit individual dentro de un arreglo, el bit a examinar lo determina el usuario. Esta instrucción permite que 1 bit sea examinado por scan.
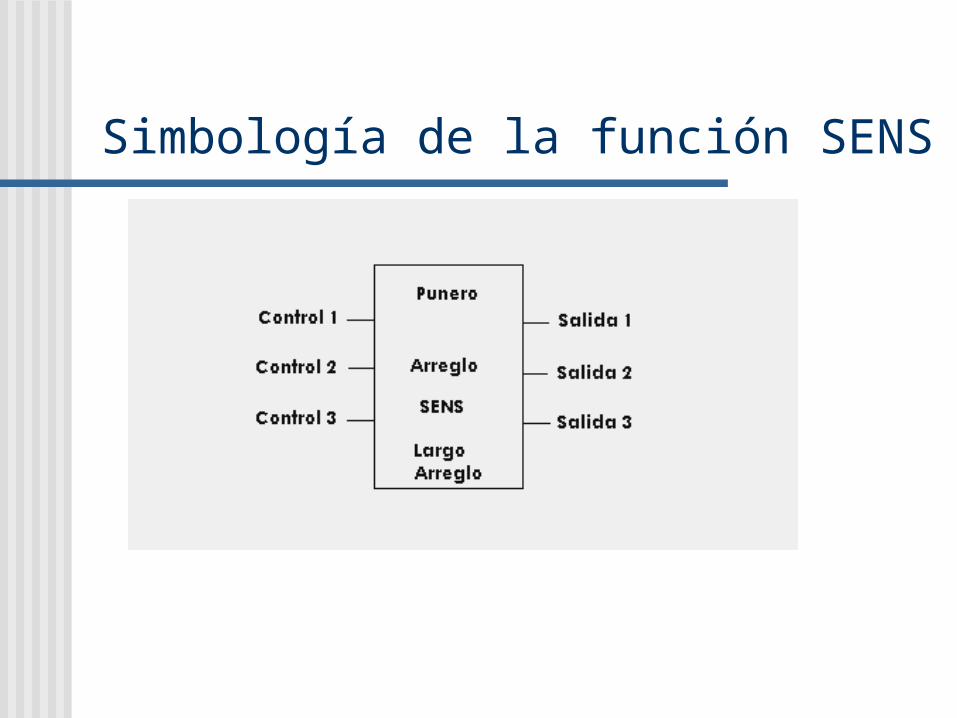
Simbología de la función SENS

Ejemplo de función SENS
Sea el siguiente el contenido del arreglo ANTES de que la instrucción se ejecute

Ejemplo de función SENS
Arreglo: 0100100101101101
40001
Bit a examinar
• Comentario
Al cerrarse la entrada Control 1 (contacto 10015) se examinará el bit 8 del arreglo formado por el registro 40001, puesto que el bit 8 es 1, la bobina 00126 se energizará y considerando que la entrada 10015 está actuando como contacto transicional es que la bobina 00126 permanecerá en estado ON durante 1 scan. Si se quisiera mantener energizada siempre la bobina 00126 cuando el bit 8 sea 1, sería necesario sustituir el contacto 10015 por un cortocircuito u otra referencia que mantenga siempre en ON la entrada Control 1.

Instrucciones Aritméticas de Doble Precisión
Estas instrucciones permiten realizar los cuatro cálculos básicos (Suma, Resta, Multiplicación y División) con doble precisión, es decir, usando operandos y resultados con 8 dígitos.
Las cuatro operaciones se agrupan en un solo bloque llamado EMTH.
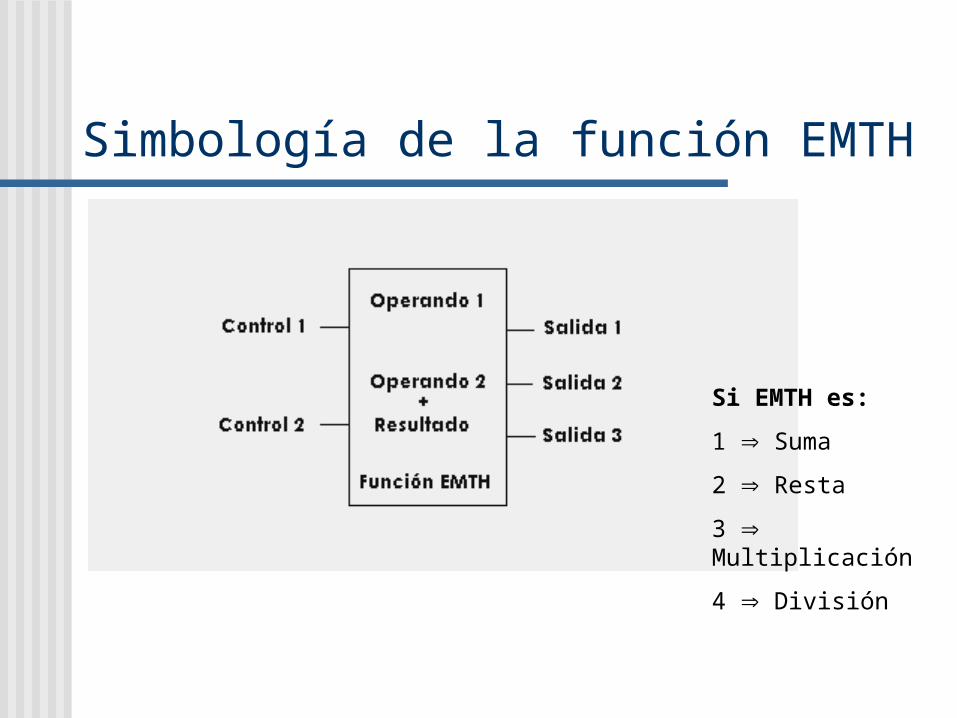
Simbología de la función EMTH
Si EMTH es:
1 Suma
2 Resta
3 Multiplicación
4 División

Ejemplo de Suma en Doble Precisión
• Como se trata de una Suma, es necesario poner aquí el número 1, ADDDP.

Ejemplo de Suma en Doble Precisión
Operando 1 : 98361698 (Reg. 40100, 40101)
Operando 2 : 07019642 (Reg. 40200, 40201)
Al cerrarse el contacto 10015 se ejecutará la función y los contenidos de os registros serán.
Operando 1 : 98361698 (Reg. 40100, 40101)
Operando 2 : 07019642 (Reg. 40200, 40201)
Overflow : 0001 (Reg. 40202)
Resultado : 05381340 (Reg. 40203, 40204)

Ejemplo de Resta en Doble Precisión
• Como se trata de una Resta, es necesario poner aquí el número 2, SUBDP.

Ejemplo de Resta en Doble Precisión
Al cerrarse el contacto 10015 y considerando las situaciones que se muestran, los resultados y estados de bobina serán:
Operando 1 Operando 2 Resultado Estados
40100 40101 40200 40201 40202 40203 40204 00001 00002 00003
9763 1839 0026 9738 0000 9736 2101 ON OFF OFF
0000 1897 0000 1897 0000 0000 0000 OFF ON OFF
0106 0095 8057 0001 0000 7950 9906 OFF OFF ON

Ejemplo de Multiplicación en Doble Precisión
• Como se trata de una Multiplicación, es necesario poner aquí el número 3, MULDP.

Ejemplo de Multiplicación en Doble Precisión
Sean los siguientes los contenidos de los operandos 1 y 2 ANTES que la función se ejecute.
Operando 1 : 01234592 (40100, 40101)
Operando 2 : 48196381 (40200, 40201)
Al cerrarse el contacto 10015 se ejecutará la función y los contenidos delos registros serán:
Operando 1 : 01234592 (40100, 40101)
Operando 2 : 48196381 (40200, 40201)
Resultado : 0059610217108712 (40201, 40203, 40204, 40205)
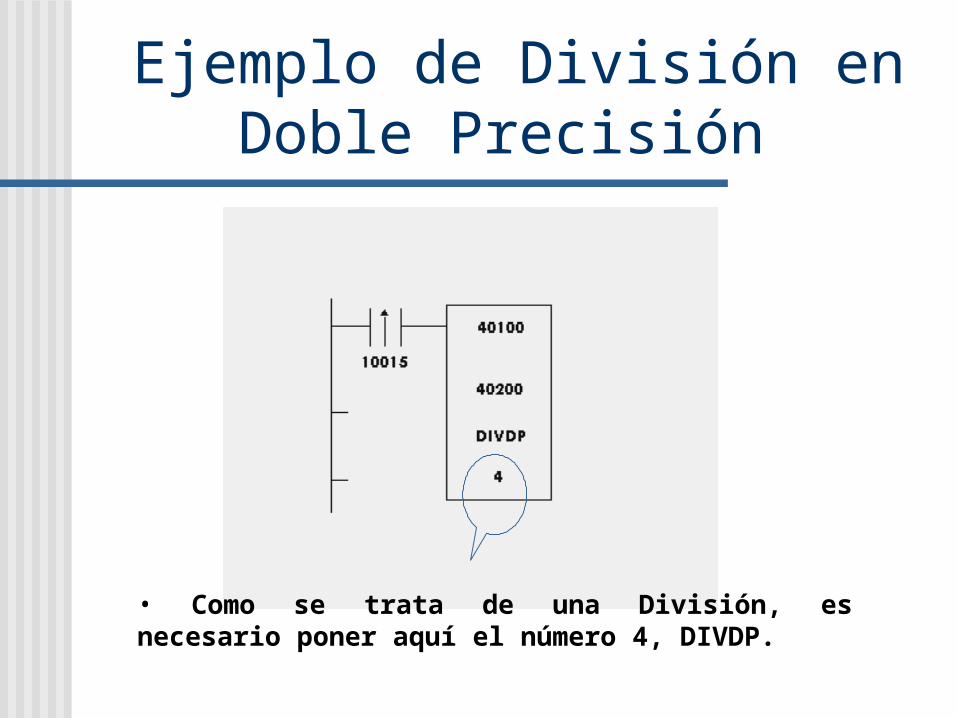
Ejemplo de División en Doble Precisión
• Como se trata de una División, es necesario poner aquí el número 4, DIVDP.

Ejemplo de División en Doble Precisión
Sean los siguientes los contenidos de los Operandos 1 y 2 ANTES que la función se ejecute:
Operando 1 : 12345678 (40100, 40101)
Operando 2 : 00567890 (40200, 40201)
Al cerrarse el contacto 10015 se ejecutará la función y los contenidos de los registros serán:
Operando 1 : 12345678 (40100, 40101)
Operando 2 : 00567890 (40200, 40201)
Resultado : 00000021 (40202, 40203)
00419988 (40204, 40205) --- Resto

Software de Documentación, Configuración, Programación y
Monitoreo MODSOFT El Software de Programación
Modsoft 984, para servidores DOS es una herramienta que permite a través de menús interactivos documentar, programar, forzar y monitorear la lógica y los datos de un Controlador Lógico Programable Modicon, conectado en línea a través de una puerta serial.
Programando con MODSOFT Una vez terminado el procedimiento
de instalación, se debe digitar (Modsoft, Lmodsoft o Cmodsoft, según sea la versión del Software) para entrar a la aplicación. Esto es como muestra la siguiente figura:
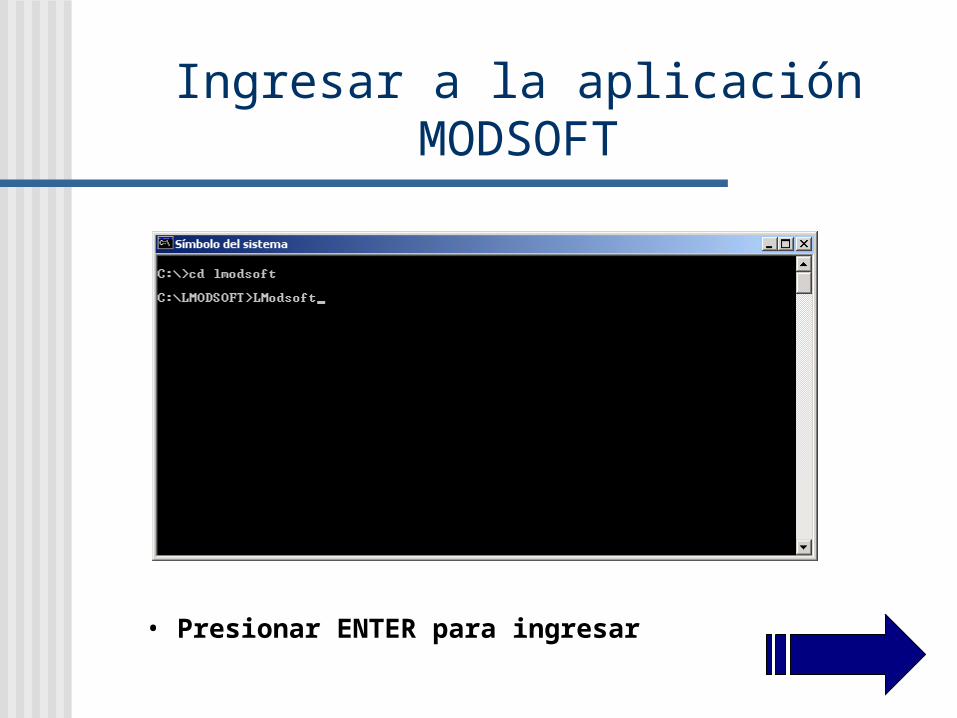
Ingresar a la aplicación MODSOFT
• Presionar ENTER para ingresar

Presentación del MODSOFT
• Una vez verificada la información presionar ENTER para entrar en el menú principal.
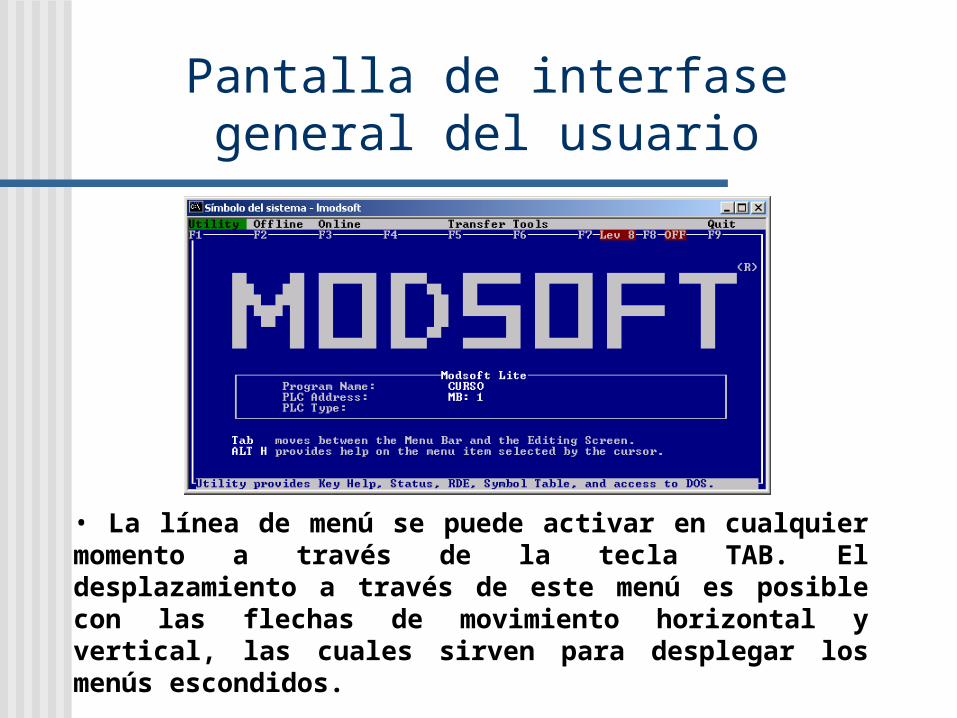
Pantalla de interfase general del usuario
• La línea de menú se puede activar en cualquier momento a través de la tecla TAB. El desplazamiento a través de este menú es posible con las flechas de movimiento horizontal y vertical, las cuales sirven para desplegar los menús escondidos.
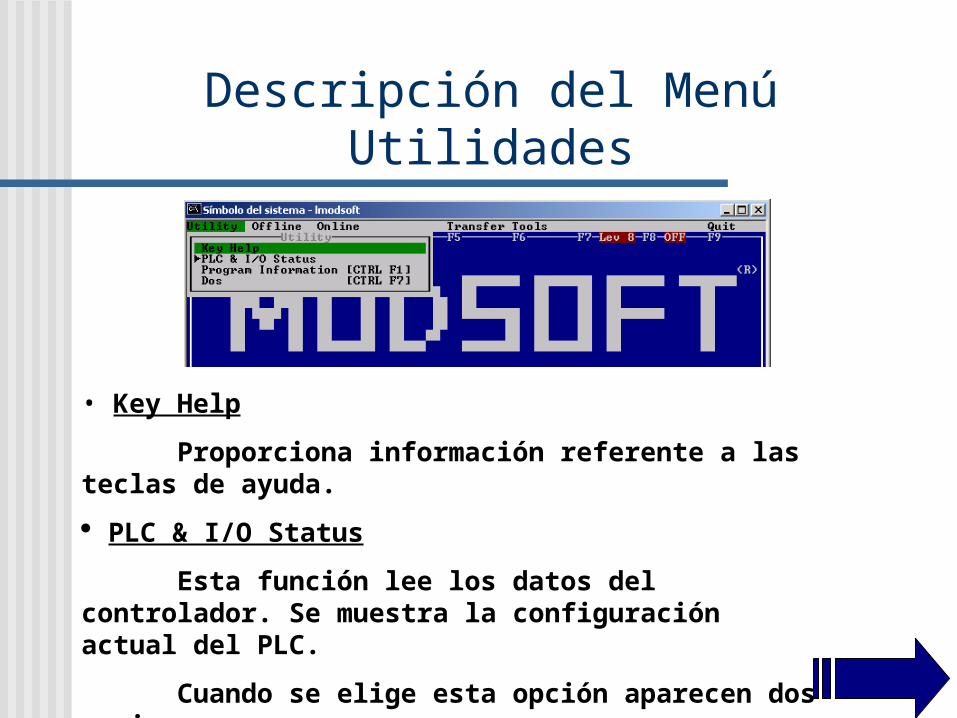
Descripción del Menú Utilidades
• Key Help
Proporciona información referente a las teclas de ayuda.
PLC & I/O Status
Esta función lee los datos del controlador. Se muestra la configuración actual del PLC.
Cuando se elige esta opción aparecen dos opciones:

Descripción del Menú UtilidadesSelect Program : En la cual se debe
elegir el programa que contiene los parámetros de comunicación con el PLC.
Direct to PLC : En la cual se deben especificar los parámetros.
Program Information
Entrega información del ambiente de desarrollo fuera de línea (Offline). Esta pantalla despliega el tipo de controlador, rango de configuración, información de archivos, información del número de revisión y fecha.
DOS
Cuando se elige esta opción se llama a un “shell” de ambiente DOS, en el cual se pueden ingresar comandos DOS, como copiar y cambiar de nombre.
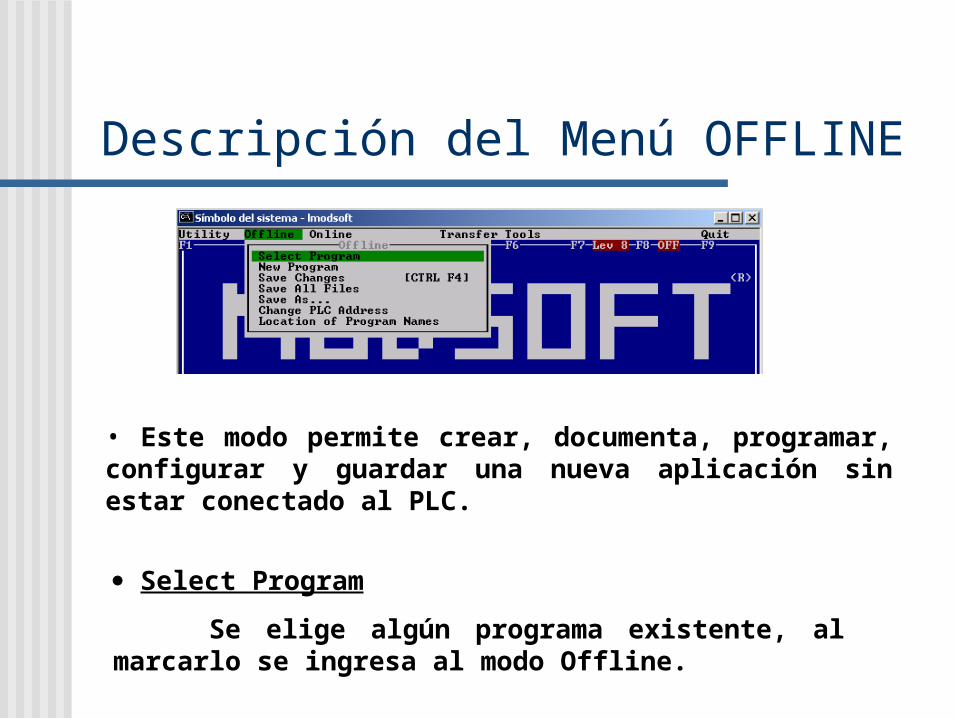
Descripción del Menú OFFLINE
• Este modo permite crear, documenta, programar, configurar y guardar una nueva aplicación sin estar conectado al PLC.
Select Program
Se elige algún programa existente, al marcarlo se ingresa al modo Offline.

Descripción del Menú OFFLINE
New Program
Los pasos para crear un programa Offline son los siguientes:
• Asignar un nombre al programa
Descripción del Menú OFFLINE
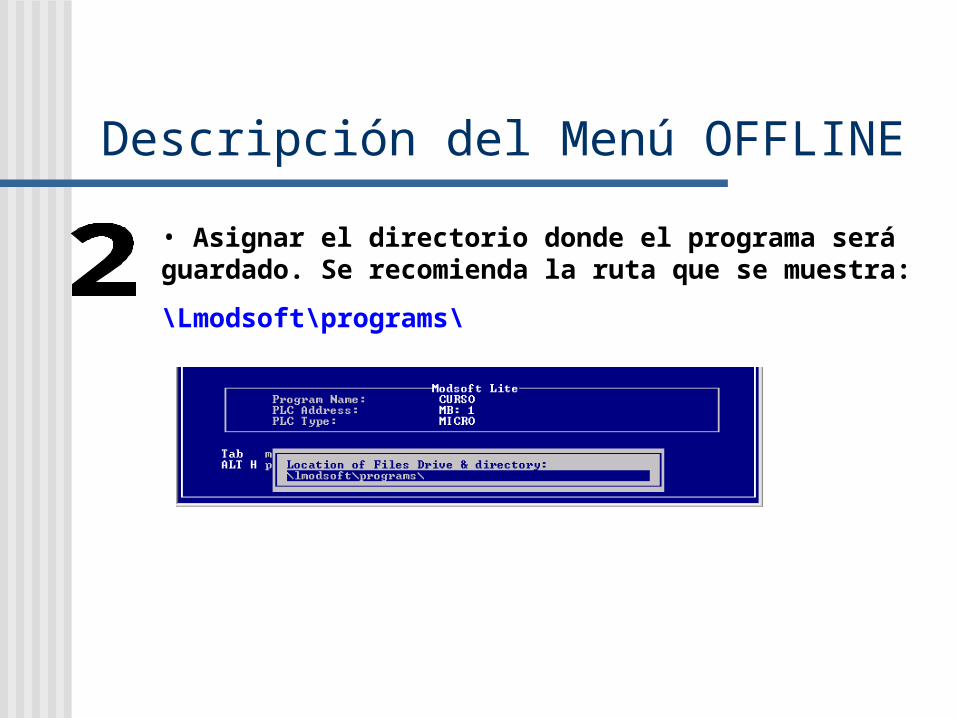
• Asignar el directorio donde el programa será guardado. Se recomienda la ruta que se muestra:
\Lmodsoft\programs\

Descripción del Menú OFFLINE
• Asignar los parámetros de comunicación
• El seteo de los DIP Switch se muestra gráficamente y corresponde a los parámetros que se están ingresando, se debe verificar que corresponda a los de su PLC.

Descripción del Menú OFFLINE
• Una vez terminada la configuración de parámetros se muestra una pantalla con el resumen de las variables de ambiente con las cuales trabajará el sistema.

Descripción del Menú OFFLINE
• En esta pantalla se debe realizar el resto de la configuración del PLC, por ejemplo, el Tipo de PLC (PLC Type), en el sub menú OverView, y los módulos de I/O, en el sub menú I/OMap.
• Sub Menú OverView

Descripción del Menú OFFLINE
• Sub Menú I/OMap
• Luego de finalizar la configuración, al realizar ESC entrega la opción de crear o No el primer segmento del programa

Descripción del Menú OFFLINE
• Pregunta antes de ingresar al área de trabajo.
•Si se elige la opción de crear el primer segmento de red del programa (Y), el cursor se encuentra en la columna 1 fila 1 del área de trabajo. Luego nos encontramos en condiciones de empezar la programación en Lógica Escalera.
Descripción del Menú OFFLINE
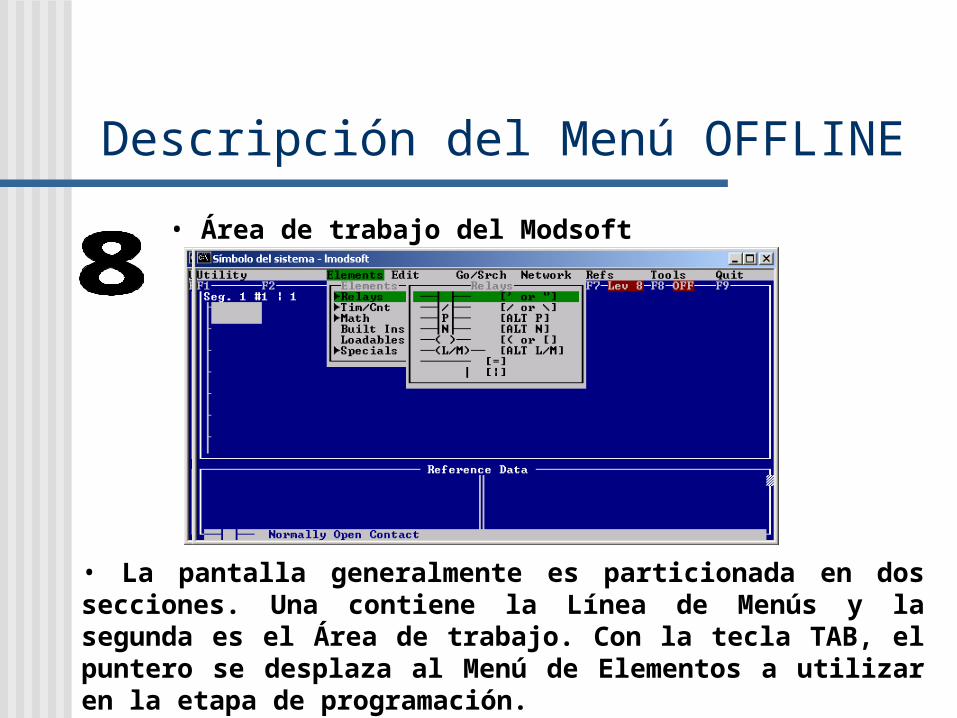
• Área de trabajo del Modsoft
• La pantalla generalmente es particionada en dos secciones. Una contiene la Línea de Menús y la segunda es el Área de trabajo. Con la tecla TAB, el puntero se desplaza al Menú de Elementos a utilizar en la etapa de programación.
Descripción del Menú ONLINE
• Mediante Select Program se elige el programa a ser cargado.
• Cuando se selecciona la opción Direct To PLC se puede observar el Ladder (Escalera) y el flujo de energía, pero sin comentarios.
• Si se realizan cambios al programa del controlador en modo Direct To PLC y se desea grabar los contenidos del controlador, se debe salir del modo Direct To PLC, seleccionar el Menú Transfer y elegir PLC to File.
Descripción del Menú ONLINE
Menú Transfer
• Operación del menú de transferencia de información desde y hacia el PLC.
• Con este procedimiento, se transfiere la aplicación respaldada en al disco duro al PLC. Comprende el programa, la configuración y los últimos datos respaldados.
• Cabe señalar que para ejecutar éste comando el PLC debe estar detenido.

Descripción del Menú ONLINE
PLC to File
• La transferencia del Software del PLC al panel es ejecutado con la selección de Select Program o New Program. La transferencia al archivo graba los contenidos del PLC directamente al archivo especificado.

Descripción del Menú ONLINE
File to PLC
• La transferencia del archivo de programa al controlador se realiza con esta opción. Si el controlador está corriendo debe ser detenido (la opción es mostrada por el Modsoft).
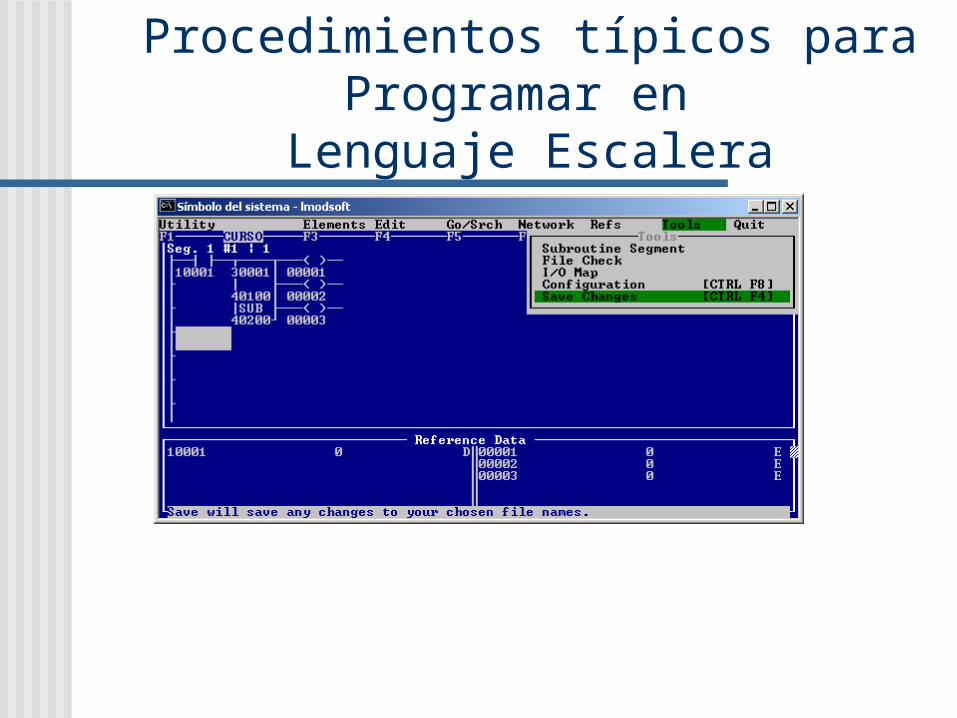
Procedimientos típicos para Programar en
Lenguaje Escalera
Aplicación y Ejemplo de un Control ON – OFF a través de un PLC
• El objetivo es realizar un control ON – OFF a través un PLC Modicon, con el cual se pueden controlar indeterminadas variables, tales como Temperatura, Presión, etc..
• El control a realizar será enfocado a una variable de temperatura, la que puede perfectamente estar simulando cualquier variable a controlar. Además de lo anterior se incrementará un control de una alarma de intrusos.
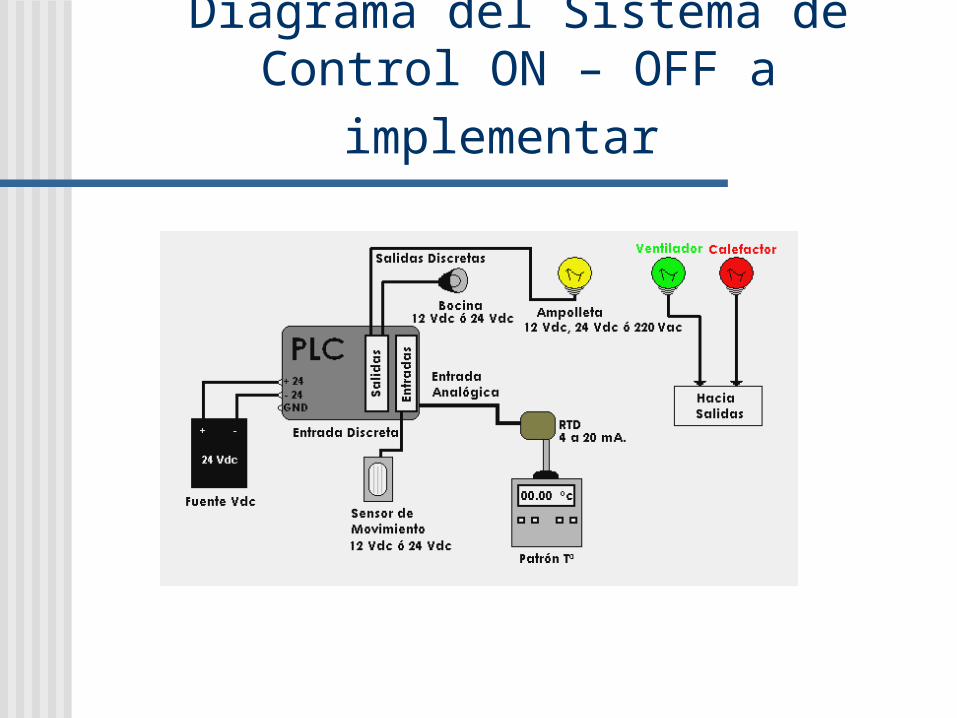
Diagrama del Sistema de Control ON – OFF a implementar
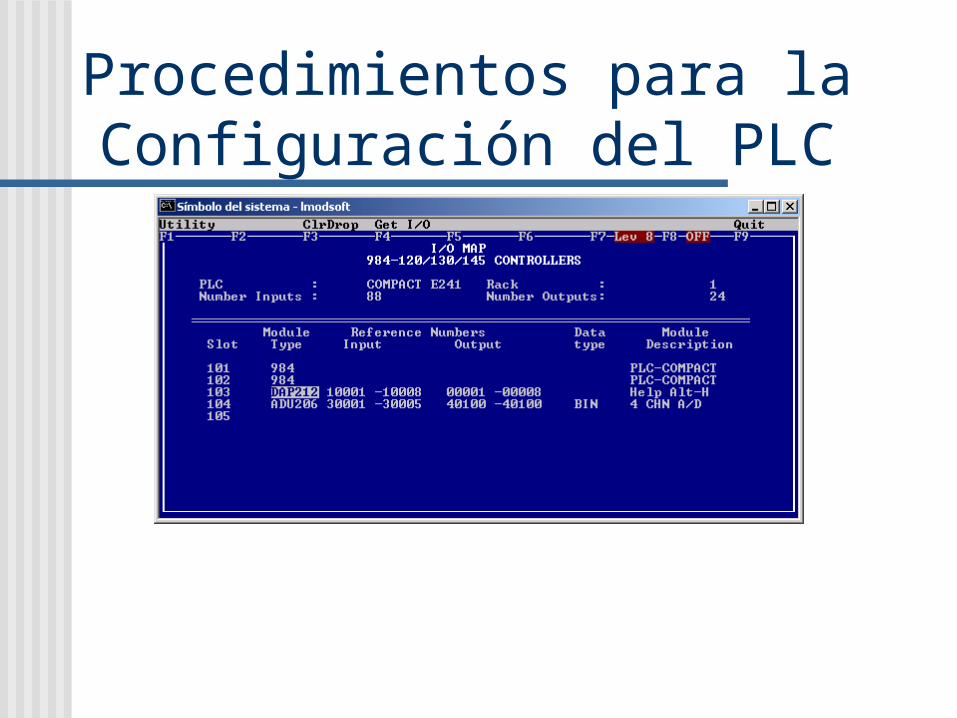
Procedimientos para la Configuración del PLC

Programación en Lenguaje Escalera
• Los siguientes segmentos muestran la programación realizada para el control de Temperatura.

Programación en Lenguaje Escalera
• El siguiente paso es el control de la alarma de intrusos

Curso de Controladores Lógicos Programables
“Modicon”
Utem
Departamento de Electricidad
Presentó:























![Curso plc[1]](https://img.pdfslide.tips/doc/110x75/5876c3341a28ab6d5a8b5491/curso-plc1-591a5277ee5df.jpg)



![Curso PLC Em Casteliano[1]](https://img.pdfslide.tips/doc/110x75/577d21731a28ab4e1e953ed6/curso-plc-em-casteliano1.jpg)
