Embed Size (px)
Citation preview
1
DAO ĐỘNG LIÊN KẾT I. DAO ĐỘNG LIÊN KẾT BỞI LÒ XO (TỤ ĐIỆN)
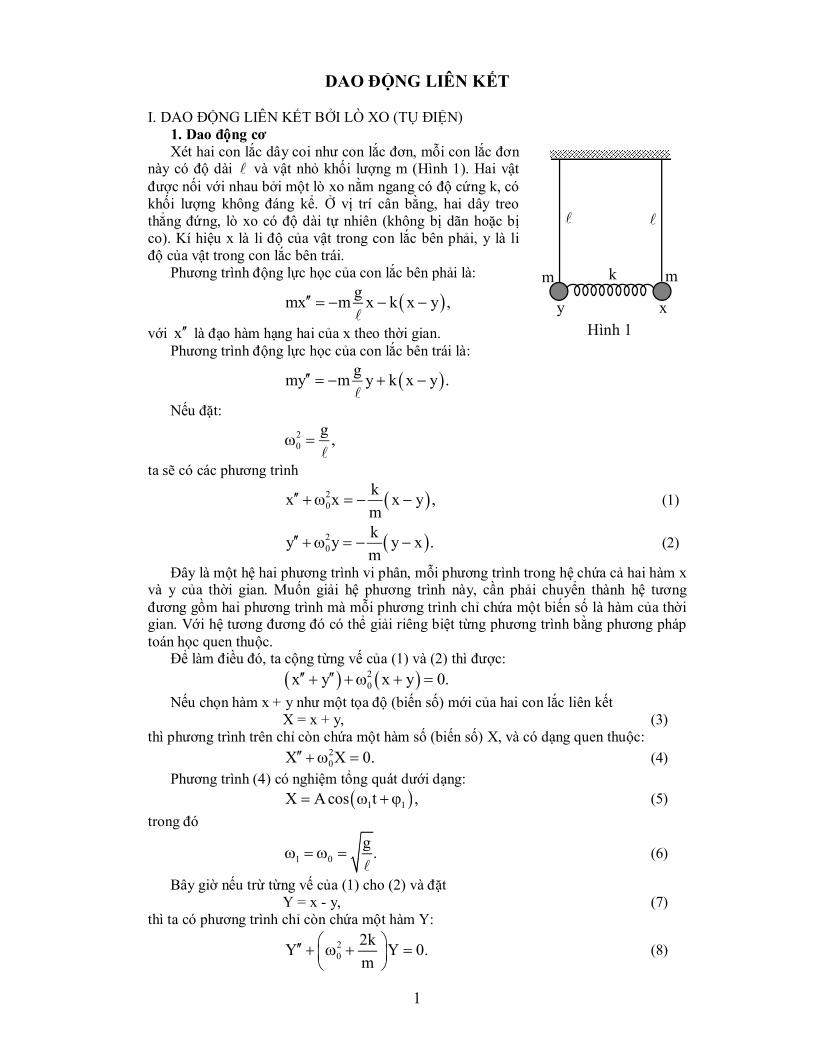
1. Dao động cơ Xét hai con lắc dây coi như con lắc đơn, mỗi con lắc đơn
này có độ dài và vật nhỏ khối lượng m (Hình 1). Hai vật được nối với nhau bởi một lò xo nằm ngang có độ cứng k, có khối lượng không đáng kể. Ở vị trí cân bằng, hai dây treo thẳng đứng, lò xo có độ dài tự nhiên (không bị dãn hoặc bị co). Kí hiệu x là li độ của vật trong con lắc bên phải, y là li độ của vật trong con lắc bên trái.
Phương trình động lực học của con lắc bên phải là:
g
mx m x k x y ,
với x là đạo hàm hạng hai của x theo thời gian. Phương trình động lực học của con lắc bên trái là:
g
my m y k x y .
Nếu đặt:
20
g,
ta sẽ có các phương trình
20
kx x x y ,
m (1)
20
ky y y x .
m (2)
Đây là một hệ hai phương trình vi phân, mỗi phương trình trong hệ chứa cả hai hàm x và y của thời gian. Muốn giải hệ phương trình này, cần phải chuyển thành hệ tương đương gồm hai phương trình mà mỗi phương trình chỉ chứa một biến số là hàm của thời gian. Với hệ tương đương đó có thể giải riêng biệt từng phương trình bằng phương pháp toán học quen thuộc.
Để làm điều đó, ta cộng từng vế của (1) và (2) thì được:
20x y x y 0.
Nếu chọn hàm x + y như một tọa độ (biến số) mới của hai con lắc liên kết X = x + y, (3) thì phương trình trên chỉ còn chứa một hàm số (biến số) X, và có dạng quen thuộc:
20X X 0. (4)
Phương trình (4) có nghiệm tổng quát dưới dạng:
1 1X A cos t , (5)
trong đó
1 0
g.
(6)
Bây giờ nếu trừ từng vế của (1) cho (2) và đặt Y = x - y, (7) thì ta có phương trình chỉ còn chứa một hàm Y:
20
2kY Y 0.
m
(8)
x y
m k m
Hình 1
2
Đặt
2 22 0
2k,
m
hay là:
22 0
2k g 2k,
m m
(9)
thì nghiệm Y của phương trình (8) có dạng tổng quát:
2 2Y Bcos t . (10)
Nhìn tổng thể quá trình vừa được thực hiện, ta đã đưa vào hai hàm tọa độ mới X = x + y và Y = x - y. Hai hàm này, mỗi hàm thỏa mãn một phương trình (4) cho X và (8) cho Y. Hai phương trình đó tương đương với hệ hai phương trình (1) và (2). Có thể tìm nghiệm x và y thỏa mãn hệ hai phương trình (1) và (2) theo các nghiệm X và Y của (5) và (8):
1 1 2 2
1 A Bx X Y cos t cos t ,
2 2 2 (11)
1 1 2 2
1 A By X Y cos t cos t .
2 2 2 (12)
Như vậy, dao động của mỗi con lắc (trong số hai con lắc liên kết) là cộng hoặc trừ
chồng chập của hai dao động điều hòa với tần số góc lần lượt là 1
g
, và
2
g 2k.
m
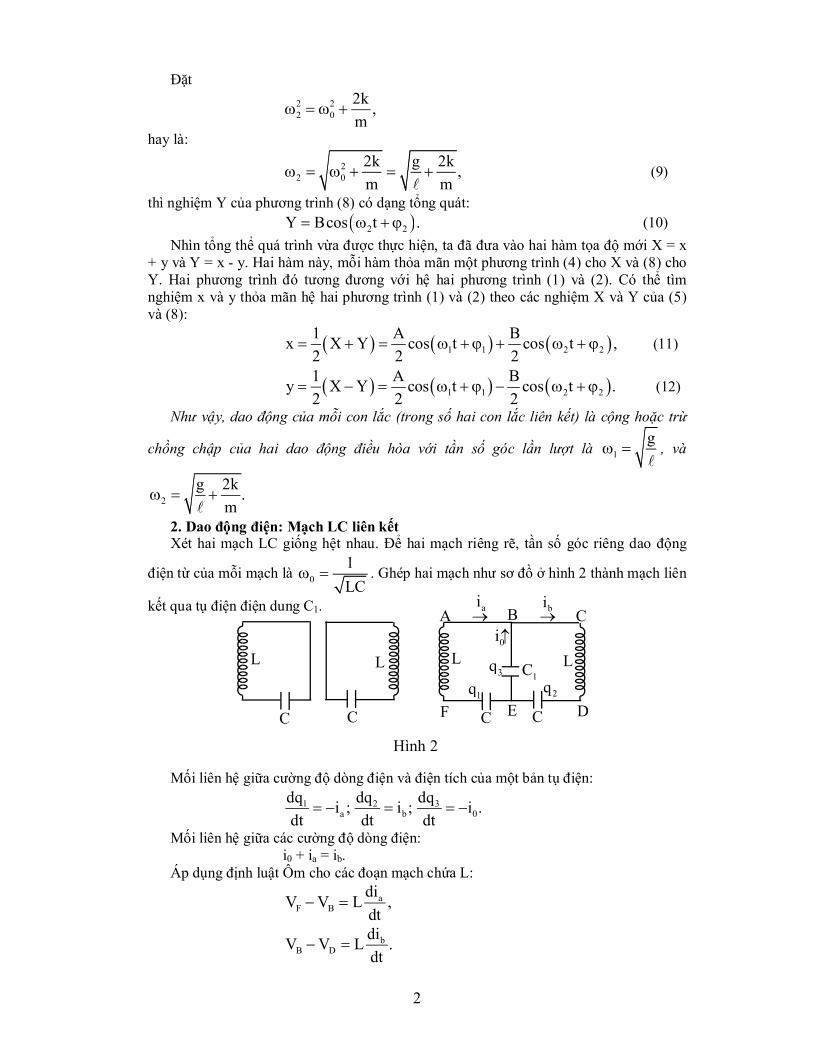
2. Dao động điện: Mạch LC liên kết Xét hai mạch LC giống hệt nhau. Để hai mạch riêng rẽ, tần số góc riêng dao động
điện từ của mỗi mạch là 0
1
LC . Ghép hai mạch như sơ đồ ở hình 2 thành mạch liên
kết qua tụ điện điện dung C1.
Mối liên hệ giữa cường độ dòng điện và điện tích của một bản tụ điện:
31 2a b 0
dqdq dqi ; i ; i .
dt dt dt
Mối liên hệ giữa các cường độ dòng điện: i0 + ia = ib.
Áp dụng định luật Ôm cho các đoạn mạch chứa L:
aF B
diV V L ,
dt
bB D
diV V L .
dt
C C
1C L L
A C
D F 1q
B
E
3q
2q
0i
ai bi
Hình 2
L L
C C
3
Mối liên hệ giữa điện tích của một bản tụ điện và hiệu điện thế giữa hai bản:
31 2F E B E D E
1
qq qV V ; V V ; V V .
C C C
Bây giờ ta chọn các biến số mới là q1 + q2 và q1 - q2 rồi thiết lập phương trình vi phân cho các biến số ấy bắt đầu từ việc tính:
2
a b1 2 1 22
d i i dq q q q ,
dt dt
(13)
theo hiệu điện thế:
a bF D 1 2
d i i 1L V V q q .
dt C
(14)
Ta sẽ có:
1 2 1 2
1q q q q 0.
LC
Như vậy, nếu đặt Y = q1 - q2 thì phương trình vi phân để xác định Y là:
21Y Y 0, (15)
với
1 0
1.
LC (16)
Cũng tương tự vậy ta tính:
2
a b1 2 1 22
d i i dq q q q ,
dt dt
(17)
theo hiệu điện thế
a bB D F
B E D E F E
31 2
1
d i iL 2V V V
dt
2 V V V V V V
2q 1q q .
C C
(18)
Chú ý rằng, nếu ban đầu cả ba tụ điện đều không tích điện thì q1 + q2 + q3 = 0 khi đó vế cuối của phương trình (18) trở thành:
1 2
1
1 2q q .
C C
Cuối cùng, ta có phương trình vi phân cho X = q1 + q2:
11 2 1 2
1
C 2Cq q q q 0,
LCC
hay là
22X X 0, (19)
với
2
1
1 2.
LC LC (20)
Bây giờ trở về biểu thức của các điện tích q1 và q2 của bản tụ điện:
1 1 1 2 2
1 A Bq X Y cos t cos t ,
2 2 2 (21)
4
2 1 1 2 2
1 A Bq X Y cos t cos t .
2 2 2 (22)
Nếu viết biểu thức của cường độ dòng điện trong từng đoạn mạch thì sẽ được:
1 1 2a 1 1 2 2
dq A Bi sin t sin t ,
dt 2 2
2 1 2b 1 1 2 2
dq A Bi sin t sin t ,
dt 2 2
0 b a 1 1 1i i i Asin t .
II. MÔ TẢ DAO ĐỘNG
1. Kiểu chuẩn và tần số góc chuẩn a. Dao động cơ
Dựa vào hai công thức (11) và (12) có thể mô tả dao động của từng con lắc liên kết. Trước hết ta xét hai trường hợp đặc biệt:
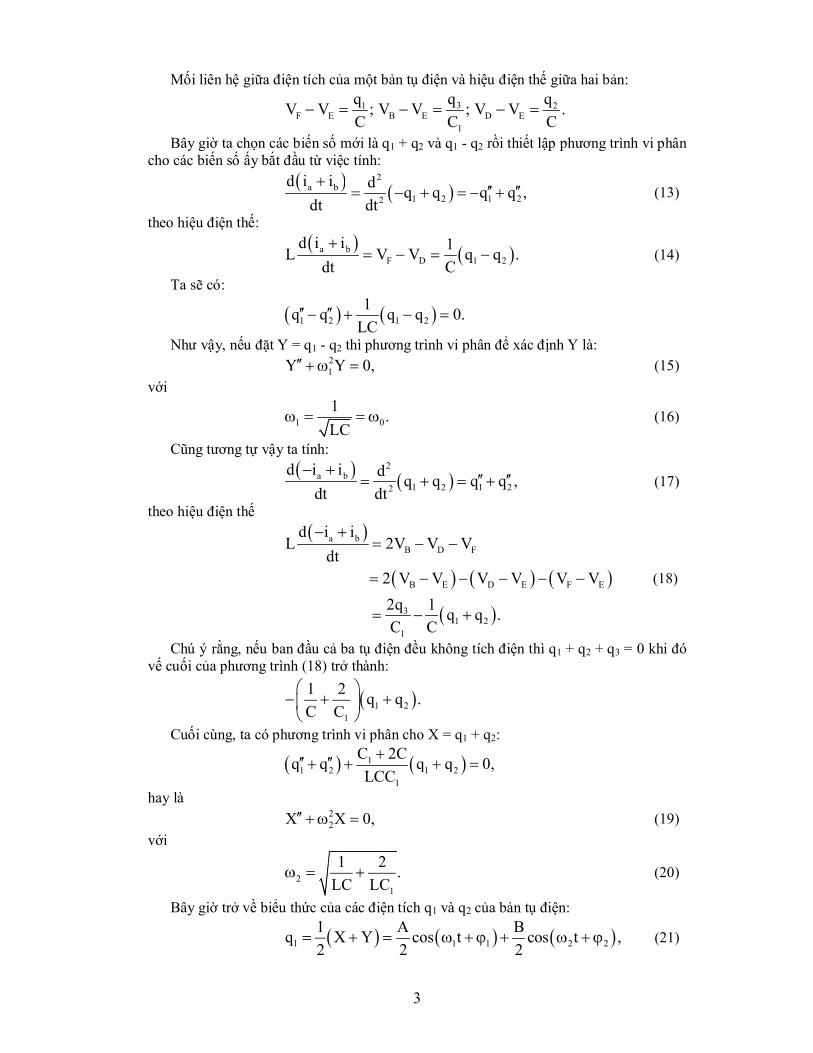
Trường hợp 1. Nếu Y 0 thì x = y tại mọi thời điểm:
1 1
X Ax y cos t .
2 2 (23)
Hai con lắc liên kết dao động cùng tần số
1 0
g,
cùng pha và có li độ luôn luôn bằng nhau
x = y. Lò xo luôn luôn có độ dài tự nhiên và không có tác dụng gì đến chuyển động của từng con lắc (Hình 3). Mỗi
con lắc dao động tự do ( 1 trùng với tần số góc riêng
0 của một con lắc độc lập).
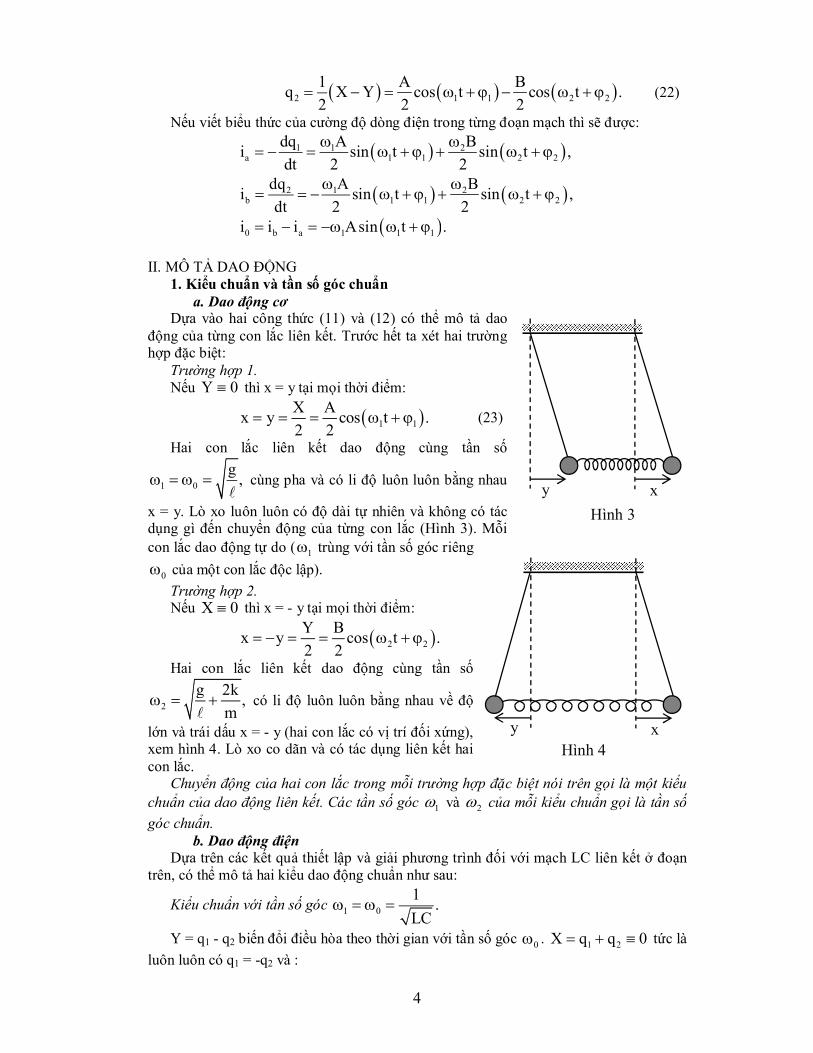
Trường hợp 2. Nếu X 0 thì x = - y tại mọi thời điểm:
2 2
Y Bx y cos t .
2 2
Hai con lắc liên kết dao động cùng tần số
2
g 2k,
m
có li độ luôn luôn bằng nhau về độ
lớn và trái dấu x = - y (hai con lắc có vị trí đối xứng), xem hình 4. Lò xo co dãn và có tác dụng liên kết hai con lắc.
Chuyển động của hai con lắc trong mỗi trường hợp đặc biệt nói trên gọi là một kiểu
chuẩn của dao động liên kết. Các tần số góc 1 và 2 của mỗi kiểu chuẩn gọi là tần số
góc chuẩn. b. Dao động điện
Dựa trên các kết quả thiết lập và giải phương trình đối với mạch LC liên kết ở đoạn trên, có thể mô tả hai kiểu dao động chuẩn như sau:
Kiểu chuẩn với tần số góc 1 0
1.
LC
Y = q1 - q2 biến đổi điều hòa theo thời gian với tần số góc 0 . 1 2X q q 0 tức là
luôn luôn có q1 = -q2 và :
x
Hình 3
y
x
Hình 4
y
5
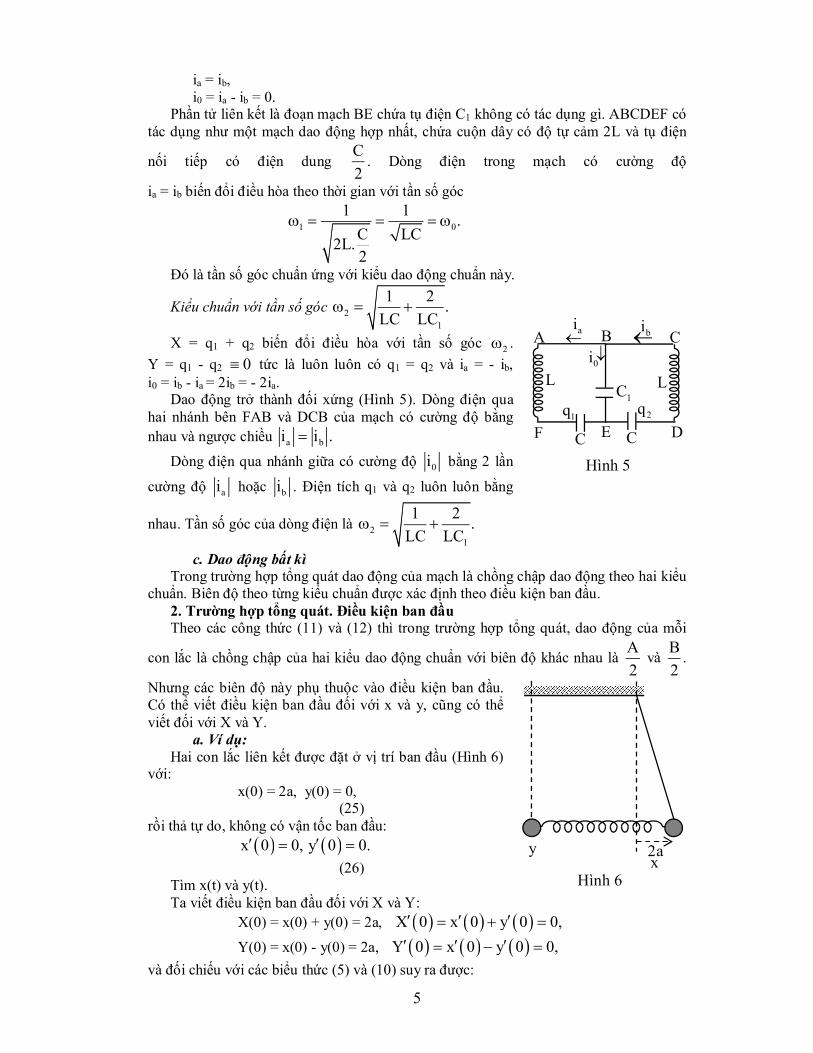
ia = ib, i0 = ia - ib = 0.
Phần tử liên kết là đoạn mạch BE chứa tụ điện C1 không có tác dụng gì. ABCDEF có tác dụng như một mạch dao động hợp nhất, chứa cuộn dây có độ tự cảm 2L và tụ điện
nối tiếp có điện dung C
2. Dòng điện trong mạch có cường độ
ia = ib biến đổi điều hòa theo thời gian với tần số góc
1 0
1 1.
C LC2L.
2
Đó là tần số góc chuẩn ứng với kiểu dao động chuẩn này.
Kiểu chuẩn với tần số góc 2
1
1 2.
LC LC
X = q1 + q2 biến đổi điều hòa với tần số góc 2 .
Y = q1 - q2 0 tức là luôn luôn có q1 = q2 và ia = - ib, i0 = ib - ia = 2ib = - 2ia.
Dao động trở thành đối xứng (Hình 5). Dòng điện qua hai nhánh bên FAB và DCB của mạch có cường độ bằng
nhau và ngược chiều a bi i .
Dòng điện qua nhánh giữa có cường độ 0i bằng 2 lần
cường độ ai hoặc bi . Điện tích q1 và q2 luôn luôn bằng
nhau. Tần số góc của dòng điện là 2
1
1 2.
LC LC
c. Dao động bất kì Trong trường hợp tổng quát dao động của mạch là chồng chập dao động theo hai kiểu
chuẩn. Biên độ theo từng kiểu chuẩn được xác định theo điều kiện ban đầu. 2. Trường hợp tổng quát. Điều kiện ban đầu Theo các công thức (11) và (12) thì trong trường hợp tổng quát, dao động của mỗi
con lắc là chồng chập của hai kiểu dao động chuẩn với biên độ khác nhau là A
2 và
B
2.
Nhưng các biên độ này phụ thuộc vào điều kiện ban đầu. Có thể viết điều kiện ban đầu đối với x và y, cũng có thể viết đối với X và Y.
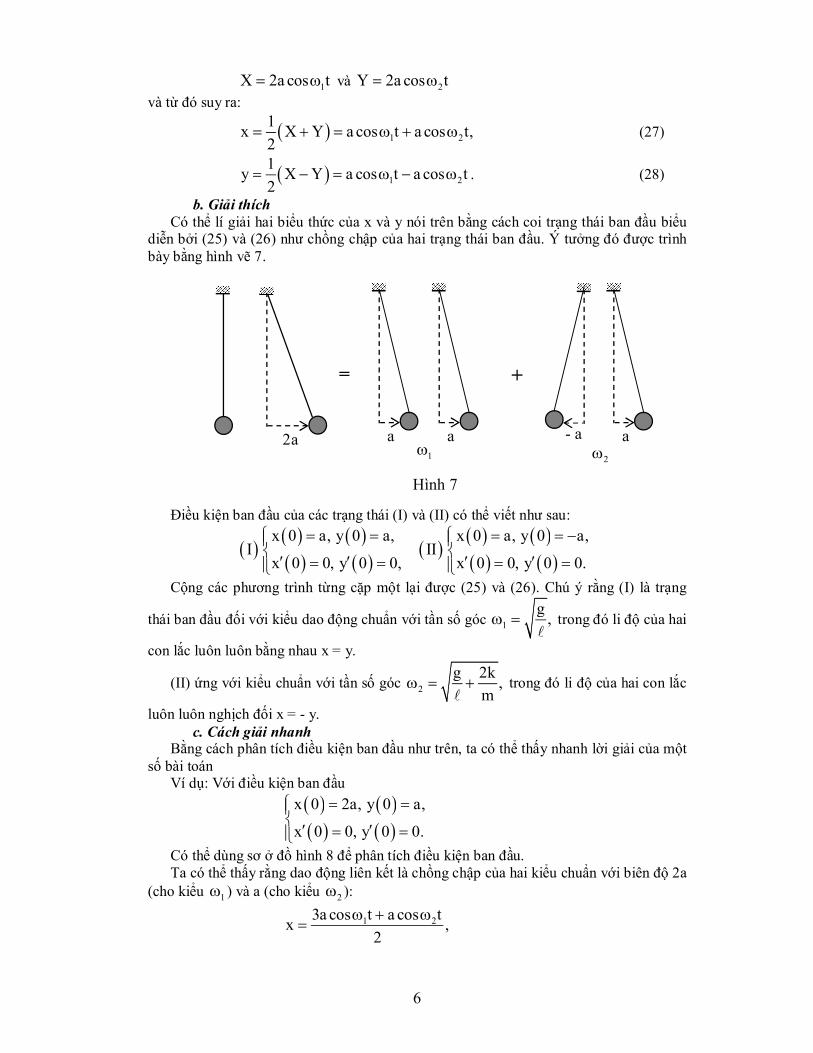
a. Ví dụ: Hai con lắc liên kết được đặt ở vị trí ban đầu (Hình 6)
với: x(0) = 2a, y(0) = 0, (25) rồi thả tự do, không có vận tốc ban đầu:
x 0 0, y 0 0.
(26) Tìm x(t) và y(t). Ta viết điều kiện ban đầu đối với X và Y:
X(0) = x(0) + y(0) = 2a, X 0 x 0 y 0 0,
Y(0) = x(0) - y(0) = 2a, Y 0 x 0 y 0 0,
và đối chiếu với các biểu thức (5) và (10) suy ra được:
C C
1C L L
A C
D F 1q
B
E
2q
0i
ai bi
Hình 5
2a
Hình 6
y x
6
1X 2a cos t và 2Y 2a cos t
và từ đó suy ra:
1 2
1x X Y a cos t a cos t,
2 (27)
1 2
1y X Y a cos t a cos t
2 . (28)
b. Giải thích Có thể lí giải hai biểu thức của x và y nói trên bằng cách coi trạng thái ban đầu biểu
diễn bởi (25) và (26) như chồng chập của hai trạng thái ban đầu. Ý tưởng đó được trình bày bằng hình vẽ 7.
Điều kiện ban đầu của các trạng thái (I) và (II) có thể viết như sau:
x 0 a, y 0 a, x 0 a, y 0 a,I II
x 0 0, y 0 0, x 0 0, y 0 0.
Cộng các phương trình từng cặp một lại được (25) và (26). Chú ý rằng (I) là trạng
thái ban đầu đối với kiểu dao động chuẩn với tần số góc 1
g,
trong đó li độ của hai
con lắc luôn luôn bằng nhau x = y.
(II) ứng với kiểu chuẩn với tần số góc 2
g 2k,
m
trong đó li độ của hai con lắc
luôn luôn nghịch đối x = - y. c. Cách giải nhanh
Bằng cách phân tích điều kiện ban đầu như trên, ta có thể thấy nhanh lời giải của một số bài toán
Ví dụ: Với điều kiện ban đầu
x 0 2a, y 0 a,
x 0 0, y 0 0.
Có thể dùng sơ ở đồ hình 8 để phân tích điều kiện ban đầu. Ta có thể thấy rằng dao động liên kết là chồng chập của hai kiểu chuẩn với biên độ 2a
(cho kiểu 1 ) và a (cho kiểu 2 ):
1 23a cos t a cos tx ,
2
Hình 7
2a
=
a a a
+
- a 1
2
7
1 23a cos t a cos ty .
2
Kết quả trên có thể kiểm tra lại bằng cách viết điều kiện ban đầu cho X và Y rồi đối chiếu với (5) và (10) để tìm X, Y và sau đó tính x, y. III. PHƯƠNG PHÁP CHUNG ĐỂ TÌM CÁC TẦN SỐ GÓC CHUẨN
1. Phương pháp toạ độ chuẩn. a. Sự biến đổi năng lượng trong hệ dao động liên kết. Biến đổi một cách đơn giản các công thức (27) và (28) ta thu được
2 1 1 2x 2acos t cos t ,2 2
(27’)
2 1 1 2y 2a sin t sin t .2 2
(28’)
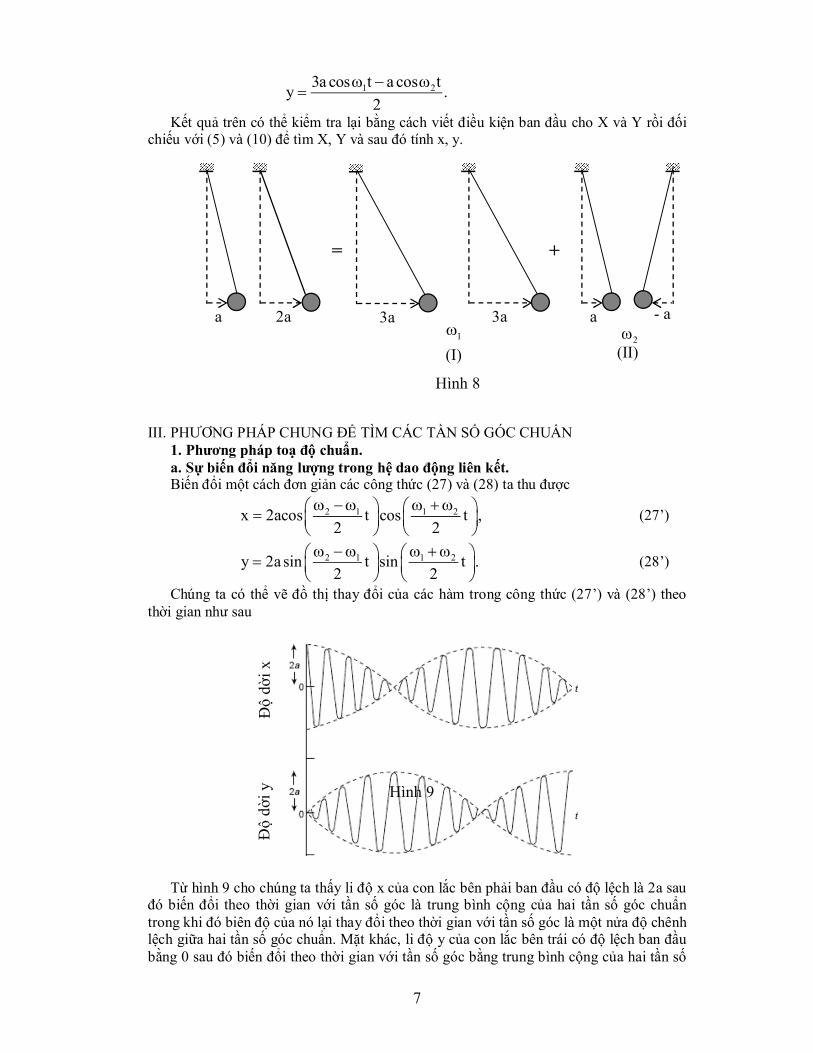
Chúng ta có thể vẽ đồ thị thay đổi của các hàm trong công thức (27’) và (28’) theo thời gian như sau
Từ hình 9 cho chúng ta thấy li độ x của con lắc bên phải ban đầu có độ lệch là 2a sau
đó biến đổi theo thời gian với tần số góc là trung bình cộng của hai tần số góc chuẩn trong khi đó biên độ của nó lại thay đổi theo thời gian với tần số góc là một nửa độ chênh lệch giữa hai tần số góc chuẩn. Mặt khác, li độ y của con lắc bên trái có độ lệch ban đầu bằng 0 sau đó biến đổi theo thời gian với tần số góc bằng trung bình cộng của hai tần số
Hình 8
2a
=
a a
+
- a
1 2
3a 3a
(I) (II)
Hình 9
Độ
dờ
i x
Độ
dờ
i y
8
góc chuẩn nhưng biên độ của nó cũng biến đổi theo thời gian với tần số góc bằng một nửa độ chênh lệch giữa hai tần số góc chuẩn. Sau một khoảng thời gian ngắn thì li độ y đạt giá trị cực đại là 2a, đồng thời khi đó li độ x bằng 0 điều này chứng tỏ năng lượng trong con lắc bên phải đã được truyền hoàn toàn sang con lắc bên trái khi đó con lắc bên trái ở trạng thái dừng với biên độ là 2a, sau đó năng lượng lại được truyền ngược trở lại con lắc ban đầu. Quá trình cứ lặp lại như thế tạo thành dao động liên kết của hệ. Điều kiện để năng lượng được trao đổi hoàn toàn giữa hai con lắc là khối lượng của hai vật
nặng phải đồng nhất và tỉ số 1 2 2 1/ là một số nguyên, các trường hợp
khác thì không chuyển hoàn toàn. Vậy một câu hỏi đặt ra là: năng lượng của các con lắc riêng biệt thì chuyển hoá lẫn
nhau, liệu có tồn tại một hệ toạ độ mà ta tách hệ tưởng tượng thành các dao động điều hoà độc lập, nghĩa là không có sự trao đổi năng lượng giữa các dao động này.
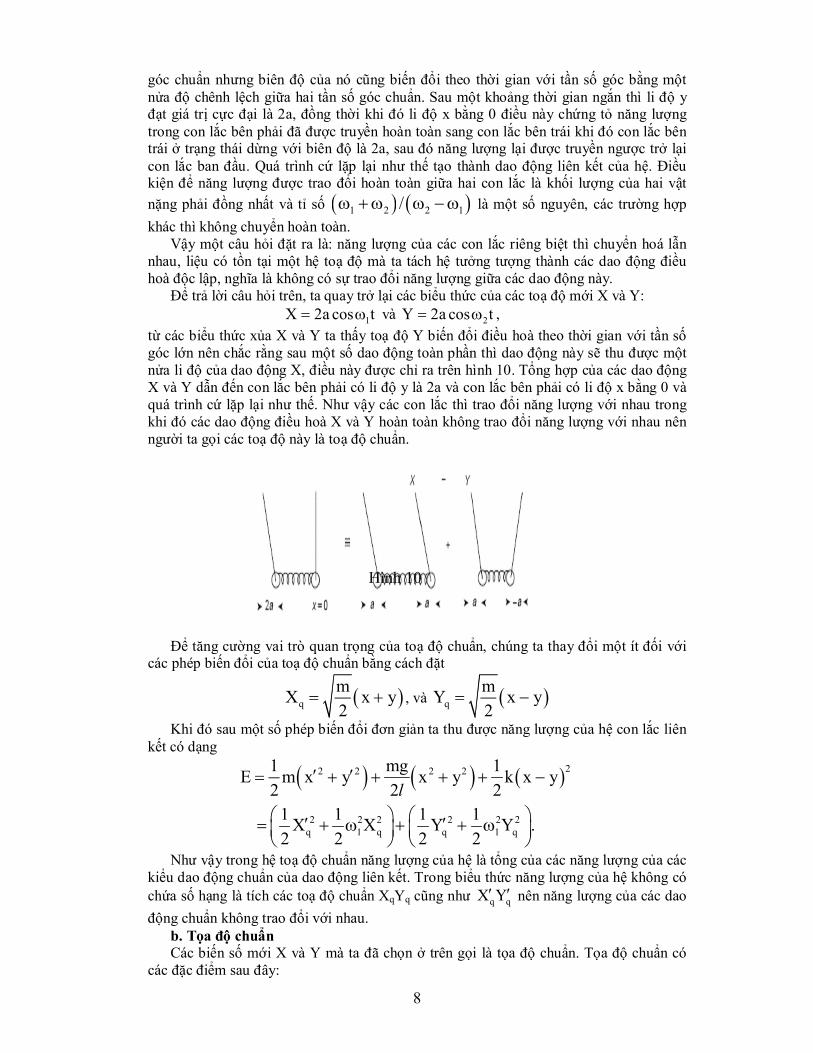
Để trả lời câu hỏi trên, ta quay trở lại các biểu thức của các toạ độ mới X và Y: 1X 2a cos t và 2Y 2a cos t ,
từ các biểu thức xủa X và Y ta thấy toạ độ Y biến đổi điều hoà theo thời gian với tần số góc lớn nên chắc rằng sau một số dao động toàn phần thì dao động này sẽ thu được một nửa li độ của dao động X, điều này được chỉ ra trên hình 10. Tổng hợp của các dao động X và Y dẫn đến con lắc bên phải có li độ y là 2a và con lắc bên phải có li độ x bằng 0 và quá trình cứ lặp lại như thế. Như vậy các con lắc thì trao đổi năng lượng với nhau trong khi đó các dao động điều hoà X và Y hoàn toàn không trao đổi năng lượng với nhau nên người ta gọi các toạ độ này là toạ độ chuẩn.
Để tăng cường vai trò quan trọng của toạ độ chuẩn, chúng ta thay đổi một ít đối với
các phép biến đổi của toạ độ chuẩn bằng cách đặt
q
mX x y
2 , và q
mY x y
2
Khi đó sau một số phép biến đổi đơn giản ta thu được năng lượng của hệ con lắc liên kết có dạng
22 2 2 2
2 2 2 2 2 2q 1 q q 1 q
1 mg 1E m x y x y k x y
2 2 2
1 1 1 1X X Y Y .
2 2 2 2
l
Như vậy trong hệ toạ độ chuẩn năng lượng của hệ là tổng của các năng lượng của các kiểu dao động chuẩn của dao động liên kết. Trong biểu thức năng lượng của hệ không có chứa số hạng là tích các toạ độ chuẩn XqYq cũng như q qX Y nên năng lượng của các dao
động chuẩn không trao đổi với nhau. b. Tọa độ chuẩn Các biến số mới X và Y mà ta đã chọn ở trên gọi là tọa độ chuẩn. Tọa độ chuẩn có
các đặc điểm sau đây:
Hình 10

9
+ Tọa độ chuẩn là tọa độ trong đó các phương trình động lực học có dạng một tập hợp phương trình vi phân tuyến tính có hệ số là hằng số, mỗi phương trình chỉ chứa một biến số độc lập.
+ Dao động liên quan đến chỉ một biến số độc lập X (hoặc Y) gọi là kiểu chuẩn của dao động và có tần số góc chuẩn. Trong một kiểu chuẩn như vậy, mọi thành phần của hệ dao động với cùng tần số góc chuẩn. + Năng lượng toàn phần của một hệ thống không tắt dần có thể diễn tả như là tổng của các bình phương tọa độ chuẩn nhân với hệ số không đổi cộng với tổng của các bình phương đạo hàm theo thời gian của tọa độ chuẩn nhân với những hằng số không đổi:
22
i i i ii i
W= A X B X ,
trong đó Xi là tọa độ chuẩn thứ i, dấu kí hiệu lấy tổng theo tất cả các tọa độ chuẩn. Như vậy, năng lượng của một hệ hai dao động tử liên kết khi cả kiểu X và kiểu Y đều dao động thì có thể biểu diễn theo các bình phương tọa độ X2 và Y2 và các bình phương
vận tốc 2X và 2Y :
2 2XW aX bX ,
2 2
yW cY dY ,
trong đó a, b, c và d là các hằng số. + Các kiểu dao động chuẩn hoàn toàn độc lập với nhau
Các kiểu dao động không trao đổi năng lượng với nhau, nếu chỉ có một kiểu dao động được thực hiện thì kiểu kia nghỉ và luôn nghỉ. + Mỗi con đường độc lập mà hệ có thể nhận năng lượng gọi là một bậc tự do. Mỗi dao động tử điều hòa có hai bậc tự do: nó có thể nhận thêm năng lượng qua động năng hoặc qua thế năng. Hai con lắc liên kết có bốn bậc tự do.
c) Phép biến đổi toạ độ chuẩn. Trong gần đúng điều hoà, ta biểu diễn năng lượng của hệ dao động liên kết trong toạ
độ chuẩn để năng lượng của hệ có thể khoả sát như năng lượng của các dao động điều hoà độc lâp.
Phép biến đổi từ các toạ độ bất kì về hệ về toạ độ chuẩn phải thoả mãn các điều kiện sau:
+ Phép biến đổi phải tuyến tính vì phương trình dao động của hệ liên kết trong gần đúng điều hoà là tuyến tính.
+ Phép biến đổi của hệ phải là thuần nhất vì ở vị trí cân bằng các toạ độ bất kì hay toạ độ chuẩn đều bằng không.
Vậy phép biến đổi có dạng
S
i ij jj 1
x X
,
trong đó S là số toạ độ độc lập để xác định vị trí của hệ, αij là các hằng số phụ thuộc vào các thông số đặc trưng cho hệ. Ta chọn các hệ số αij thoả mãn điều kiện sao cho biểu thức năng lượng của hệ không chứa các số hạng chứa tích từ hai toạ độ trở lên XiXj và tích các đạo hàm của các toạ độ này.
d) Ví dụ. Trong mục này chúng ta áp dụng phương pháp biến đổi toạ độ chuẩn để tìm tần số
của các dao động chuẩn. Xét hệ con lắc dao động liên kết trong mục I.1, khi đó năng lượng của hệ được tính theo công thức
22 2 2 21 mg 1
E m x y x y k x y .2 2 2
l
Áp dụng phép biến đổi toạ độ chuẩn ở trên ta có

10
11 1 12 2 21 1 22 2x X X ; y X X .
Có thể đơn giản hoá một chút bài toán đã đặt ra và đưa nó về việc xác định 2 chứ
không phải 4 hệ số không đổi. Thực vậy, có thể kí hiệu 21 1X X , 22 2X Y . Khi
đó nếu trong các biểu thức thế năng và động năng không chứa các số hạng với tích của các toạ độ chuẩn X1X2 và với tích của các đạo hàm theo thời gian của các toạ độ này
1 2X X thì khi chuyển sang các toạ độ chuẩn X và Y cũng không chứa dạng như thế. Vậy
vẫn không làm mất tính chất tổng quát của lập luận, chúng ta sẽ tìm phép biến đổi sang dạng toạ độ chuẩn theo công thức
1 2x X Y; y X Y .
Đây là phép biến đổi chung cho hệ có hai toạ độ. Thay phép biến đổi trên vào động năng của cơ hệ ta có
2 2 2 21 2 1 2
1T m 1 X 1 Y 2 1 X Y
2 ,
từ biểu thức động năng của cơ hệ ta suy ra điều kiện
1 2 1 0 .
Thay phép biến đổi vào thế năng của hệ ta có
2 2 2 21 2 1 2
2 22 21 2 1 2
mgU 1 X 1 Y 2 1 XY
2
1k 1 X 1 Y 2 1 1 XY
2
l
từ biểu thức thế năng của cơ hệ ta suy ra điều kiện
1 2 1 2
mg1 k 1 1 0
l.
Kết hợp các điều kiện trên ta có hệ phương trình xác định các hằng số α1 và α2 như sau
1 2
1 2
1,
0.
Giải hệ phương trình trên ta thu được các nghiệm 1
2
1
1
hoặc 1
2
1
1
. Vậy ta có
hai phép biến đổi sang toạ độ chuẩn như sau + Cách 1: x X Y; y X Y , khi đó trong hệ toạ độ chuẩn ta có biểu thức cơ
năng của cơ hệ
2 2 2 2
2 2 2 2 2 21 2
mg mgE m X Y X 2k Y
m X X m Y Y .
l l
+ Cách 2: x Y X; y X Y , khi đó trong hệ toạ độ chuẩn ta có biểu thức cơ
năng của cơ hệ
2 2 2 2
2 2 2 2 2 21 2
mg mgE m X Y Y 2k X
m Y Y m X X .
l l

11
Với hai hệ toạ độ chuẩn trên ta luôn thu được hai tần số góc ứng với hai kiểu dao
động chuẩn của dao động liên kết: 1
g
l và 2
g 2k
m
l.
2. Phương pháp tìm tần số của các kiểu dao động của các hệ liên kết đơn giản Chúng ta đã thấy rằng, khi một hệ liên kết dao động theo một kiểu chuẩn đơn độc thì
mọi thành phần của hệ dao động với tần số của kiểu ấy. Dựa vào điều này ta có thể đề ra một phương pháp tính giá trị của tần số của các kiểu chuẩn và các biên độ tỉ đối của các dao động tử thành phần.
Giả sử hệ hai con lắc liên kết đã xét ở trên chỉ dao động theo một trong các kiểu chuẩn của nó với tần , phương trình động lực học sẽ là:
x
mx mg k x y 0,
x
my mg k x y 0.
Chúng ta có thể thừa nhận nghiệm của hệ phương trình trên có dạng x Acos t,
y Bcos t,
trong đó A và B là biên độ của các li độ x và y với tần số . Với các nghiệm đó, các phương trình động lực trở thành:
2 1m A mg A k A B cos t 0,
2 1m B mg B k A B cos t 0.
Các phương trình này được thoả mãn nếu các đại lượng trong dấu móc [ ] bằng không, nghĩa là nếu sắp xếp lại các số hạng theo A và B ta sẽ có hệ hai phương trình bậc nhất, thuần nhất đối với A và B:
2 gm m k A kB 0,
(29)
2 gkA m m k B 0.
(30)
Giải hệ phương trình (29) và (30) ta tìm được A và B, và như vậy viết được đầy đủ biểu thức của x và y, tức là tìm được dao động theo kiểu chuẩn với tần số góc là .
Tuy nhiên, cần lưu ý rằng hệ phương trình (29) và (30) bao giờ cũng có nghiệm A = 0 và B = 0 (gọi là nghiệm tầm thường). Nghiệm này ứng với trạng thái không chuyển động x = 0, y = 0. Chỉ khi hệ phương trình này có nghiệm A 0 , B 0 (không tầm thường) thì hệ liên kết mới dao động.
Như vậy, điều kiện để hệ dao động liên kết dao động theo kiểu chuẩn với tần số góc là hệ phương trình (29) và (30) có nghiệm không tầm thường. Toán học đã chứng tỏ rằng điều kiện đó là định thức tạo bởi các hệ số của A và B bằng không
2
2
gm m k k
0.g
k m m k
(31)
Sau khi khai triển định thức trong phương trình (31) và rút gọn nó thì phương trình trên trở thành
12
2 2g gm m 2k m m 0.
(32)
Phương trình (32) được nghiệm đúng nếu nhận một trong hai giá trị sau
1
g,
(33)
2
g 2k.
m
(34)
Hai giá trị này chính là hai tần số góc chuẩn mà ta phải tìm. Nhìn chung phương pháp trên chỉ áp dụng cho các hệ dao động liên kết có dạng đơn giản, nghĩa là ta dễ dàng thiết lập được hệ các phương trình động lực học mô tả chuyển động của hệ.
3. Phương pháp tìm tần số của các kiểu dao động của các hệ liên kết phức tạp bằng cách sử dụng các phương trình Lagrange loại II.
Trong trường hợp tổng quát chúng ta phải áp dụng các phương trình Lagrange loại II trong tọa độ suy rộng để tìm các tần số dao động chuẩn và các kiểu dao động chuẩn của hệ. Xét một hệ gồm s dao động liên kết, đối với dạng tổng quát này của hệ, trạng thái của hệ được mô tả qua các số hạng phụ thuộc vào s tọa độ suy rộng độc lập qk (k = 1, 2, 3, . . . ., s) và vận tốc suy rộng tương ứng. Chúng ta chọn tọa độ suy rộng sao cho khi hệ ở trạng thái cân bằng (bền) thì tất cả các toạ độ này đều bằng 0 (ở trạng thái cân bằng vận tốc suy rộng và gia tốc suy rộng của hệ đều bằng 0), do đó trạng thái của hệ ở thời điểm t bất kì sẽ được mô tả tương ứng với trạng thái cân bằng của hệ. Người ta chứng minh được rằng: đối với một hệ hôlônôm thì sự tiến triển theo thời gian của hệ được mô tả bằng phương trình Lagrange loại II trong tọa độ suy rộng có dạng
k k
d L L0, k 1,2,..,3,...,s
dt q q
, (35)
với L gọi là hàm Lagrange của hệ, đối với một cơ hệ thì
k kL T U L q ,q , t .
Ta giả sử rằng đầu tiên hệ ở trạng thái cân bằng bền và được đưa ra khỏi trạng thái này với độ lệch nhỏ. Trong trường hợp cân bằng của hệ là cân bằng bền nên hàm thế năng cần có cực trị, tức là cần có các đẳng thức
1 2 k s
k k0 q q ... q ... q 0
U U0, k 1,2,3,...,s
q q
. (36)
Ta sẽ tính các tọa độ suy rộng của hệ từ vị trí cân bằng vì đã chọn tại vị trí cân bằng thì tất cả các tọa độ suy rộng đều bằng 0. Khai triển hàm thế năng của hệ thành chuỗi Taylor ở lân cận vị trí cân bằng của hệ, khi đó chúng ta thu được kết quả
2s s
1 2 s 0 k j kk 1 j,k 1k j k0 0
U 1 UU q ,q ,...,q U q q q ...,
q 2 q q
(37)
Tổng đầu tiên trong (37) là bằng 0, vì theo (36). Ngoài ra, ta có thể coi 0U 0 , mà
không làm mất tính chất tổng quát vì hàm thế năng được xác định đến hằng số tùy ý. Có thể bỏ qua các số hạng từ bậc ba trở lên vì độ lệch khỏi vị trí cân bằng của hệ là nhỏ, vậy ta thu được biểu thức thế năng có dạng
2s
1 2 s j kj,k 1 j k 0
1 UU q ,q ,...,q q q .
2 q q
(38)
Nếu đặt

13
2
jk
j k 0
UC ,
q q
(39)
thì thu được thế năng của hệ
s
1 2 s jk j kj,k 1
1U q ,q ,...,q C q q ,
2
(40)
trong đó Cjk là các hệ số không đổi, thỏa mãn điều kiện
jk kjC C , (41)
vì đạo hàm riêng không phụ thuộc vào thứ tự đạo hàm, do đó ta nói Cjk là đối xứng với việc hoán vị hai chỉ số j và k.
Nếu ta xét liên kết của cơ hệ là liên kết dừng thì số hạng động năng của hệ phụ thuộc vào tọa độ suy rộng và vận vận tốc suy rộng có dạng
jk j kj,k
1T a q q ,
2 (42)
trong đó
i ijk i
i j k
r ra m ,
q q
với i =1, 2, . . ., N, (43)
ở đây N là số chất điểm của cơ hệ. Từ biểu thức (43) ta thấy ajk phụ thuộc vào các tọa độ suy rộng và thỏa mãn điều kiện ajk = akj, nghĩa là cũng đối xứng với việc hoán vị hai chỉ số j và k. Phân tích hệ số này thành chuỗi Taylor ở lân cận vị trí cân bằng của hệ ta được
2s sjk jk
jk jk m m n0m 1 m,n 1m m n0 0
a a1a a q q q ...,
q 2 q q
(44)
vì các tọa độ suy rộng trong khai triển là nhỏ nên ta chỉ cần giữ lại số hạng đầu tiên, khi đó động năng của hệ chỉ chứa các số hạng bé hạng hai. Vậy khi xét các dao động nhỏ của hệ, cần coi các hệ số ajk trong biểu thức động năng là không đổi, nên biểu thức động năng có dạng tường minh
jk j kj,k
1T m q q ,
2
trong đó
1 2 k s
i i i ijk i i
i ij k j k0 q q ... q ... q 0
r r r rm m m
q q q q
. (45)
Hàm Lagrange của hệ trong gần đúng dao động bé có dạng
s
k k jk j k jk j kj,k 1
1L q ,q m q q C q q .
2
(46)
Do đó chúng ta thu được kết quả
kj kkj j j j
L T U UC q ,
q q q q
(47)
kj kkj j j j
L T U Tm q .
q q q q
(48)
Thế các biểu thức (47) và (48) vào vế trái của phương trình (35) thu các phương trình chuyển động của hệ
14
kj k kj k kj k kj kk k kj j
L d L dC q m q C q m q 0
q dt q dt
(49)
Trong phương trình (49) chỉ số k chạy từ 1 đến s là số bậc tự do của hệ, nên ta thu được hệ s phương trình vi phân tuyến tính, cấp 2 có hệ số không đổi. Để tìm nghiệm tổng quát của hệ phương trình này, chúng ta tìm nghiệm dưới dạng tường minh mô tả dao động chuẩn mong muốn
i t
j jq t a e .
(50)
Với nghiệm dạng (50), hệ phương trình chuyển động (49) trở thành
2kj kj k
k
C m a 0. (51)
Để hệ phương trình (51) có nghiệm không tầm thường thì định thức của các hệ số (ak) ở vế trái của hệ này phải triệt tiêu, nghĩa là
2 2 2
11 11 12 12 1s 1s
2 2 22 21 21 22 22 2s 2s
2 2 2s1 s1 s2 s2 ss ss
C m C m . . . C m
C m C m . . . C mD 0.
. . . . . . . . . . . .
C m C m . . . C m
(52)
Khai triển 2D 0 , ta nhận được phương trình bậc s của 2 . Đó là phương trình
đặc trưng cho các tần số . Trong trường hợp tổng quát, phương trình (52) có s nghiệm 2 khác nhau 2
1 , 22 , . . ., 2
s . Dễ dàng nhận thấy rằng 2 là thực và dương, vì nếu 2
là số phức thì mâu thuẫn với định luật bảo toàn cơ năng (hay bảo toàn năng lượng) của hệ. Thật vậy, nếu là số phức thì ta có thể đặt 1 2i , trong đó 1 và 2 là các số
thực. Thay 1 2i vào biểu thức qj và jq (j = 1, 2, . . ., s) ta nhận thấy rằng qj và
jq đều tỉ lệ với nhân tử 2te . Như vậy cơ năng (hay năng lượng) của hệ sẽ thay đổi theo
thời gian, điều này mâu thuẫn với định luật bảo toàn cơ năng (hay năng lượng). Vậy 2 phải thực và dương.
4. Ví dụ vận dụng phương pháp chung Trong bài toán về hai con lắc đơn liên kết ở đầu chuyên đề này, chúng ta có thể thấy
được bằng trực quan cách đưa vào hai biến số mới X và Y để tìm kiểu chuẩn của dao động. Trong một số bài toán khác không thể làm như vậy được mà phải theo đúng trình tự của phương pháp chung thì mới tìm được các tần số góc chuẩn. Sau đây là các ví dụ cụ thể.
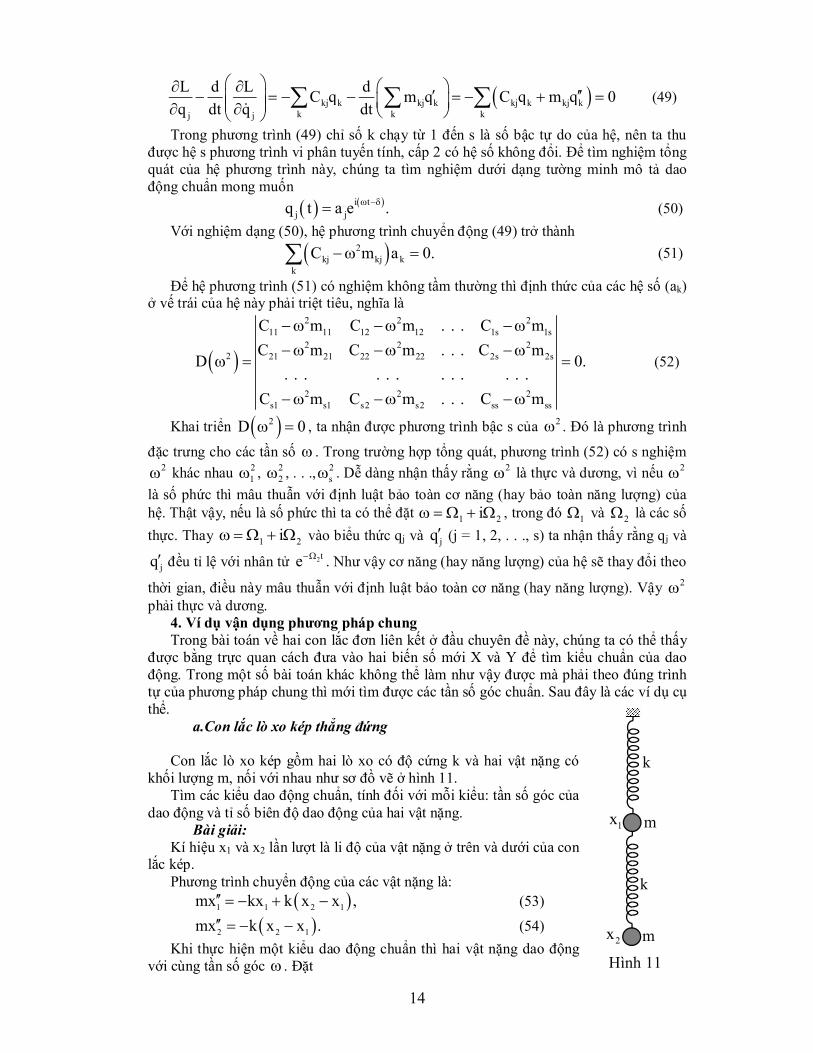
a.Con lắc lò xo kép thẳng đứng
Con lắc lò xo kép gồm hai lò xo có độ cứng k và hai vật nặng có khối lượng m, nối với nhau như sơ đồ vẽ ở hình 11.
Tìm các kiểu dao động chuẩn, tính đối với mỗi kiểu: tần số góc của dao động và tỉ số biên độ dao động của hai vật nặng. Bài giải:
Kí hiệu x1 và x2 lần lượt là li độ của vật nặng ở trên và dưới của con lắc kép.
Phương trình chuyển động của các vật nặng là:
1 1 2 1mx kx k x x , (53)
2 2 1mx k x x . (54)
Khi thực hiện một kiểu dao động chuẩn thì hai vật nặng dao động với cùng tần số góc . Đặt
2x
k
Hình 11
k
m
m 1x
15
1 1
x A cos t,
2 2x A cos t,
rồi thay vào các phương trình (53) và (54) rồi chia hai vế cho cos t và đưa các số hạng về vế đầu, ta có:
2
1 22k m A kA 0, (55)
2
1 2kA k m A 0. (56)
Điều kiện để hệ phương trình (55) và (56) có nghiệm khác không là:
2
2
2k m k0,
k k m
hay là
2
4 2
2
3k k0.
m m (57)
Phương trình (57) có các nghiệm là:
2 1 k3 5 .
2 m
Như vậy là có hai giá trị của thoả mãn phương trình (57) đó là hai tần số góc chuẩn:
1
3 5 k,
2 m
(58)
2
3 5 k.
2 m
(59)
Từ (55) hoặc (56) có thể rút ra tỉ số hai hệ số A1 và A2 của các hàm cos đối với từng kiểu chuẩn.
Kiểu dao động chuẩn thứ nhất:
Tần số góc: 1
3 5 k
2 m
.
Tỉ số hệ số: 1
2
A 1 51,618.
A 2
Hai vật nặng có li độ luôn trái dấu, vật này đi lên thì vật kia đi xuống. Tỉ số biên độ là 1,618, dao động của hai vật là ngược pha.
Kiểu dao động chuẩn thứ hai:
Tần số góc: 2
3 5 k
2 m
.
Tỉ số hệ số: 1
2
A 5 10,618.
A 2
Hai vật nặng có li độ luôn luôn cùng dấu, hai vật luôn luôn chuyển động cùng chiều, tỉ số biên độ là 0,618.
Nếu muốn kích thích con lắc kép dao động theo kiểu chuẩn thứ nhất chẳng hạn, thì phải có điều kiện ban đầu thoả mãn hệ thức:
1
2
x 0 1 5,
x 0 2
và 1 2x 0 0, x 0 0.
16
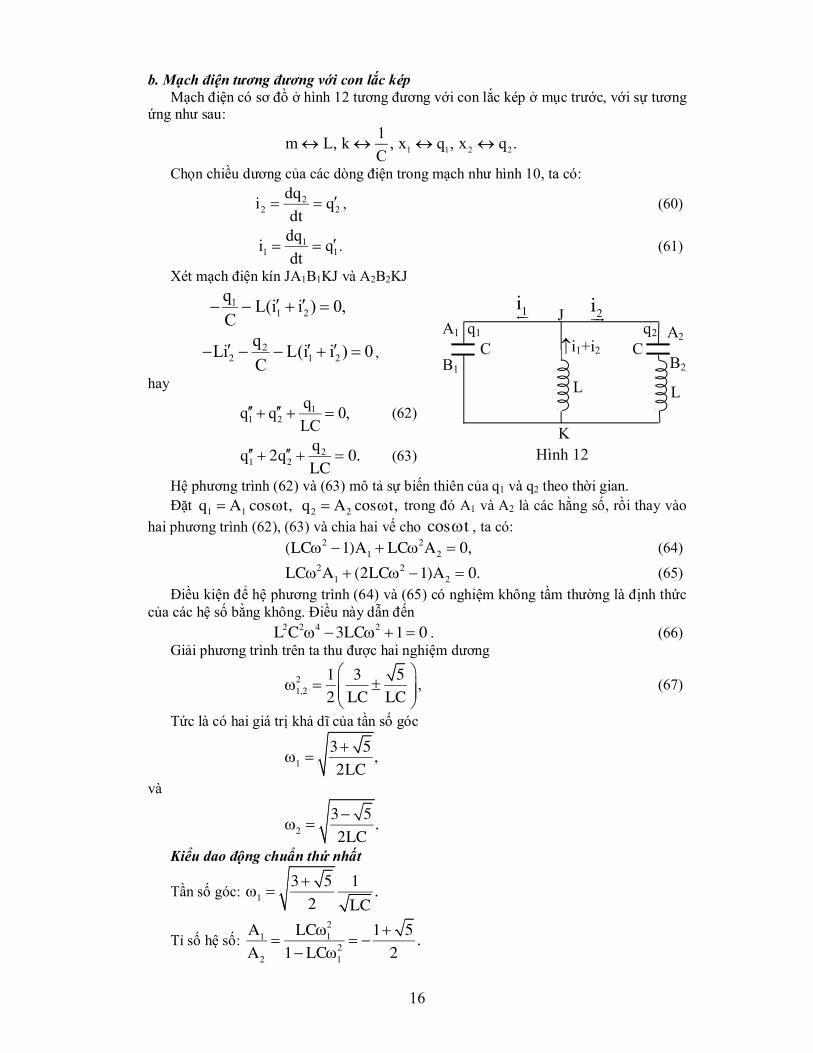
b. Mạch điện tương đương với con lắc kép Mạch điện có sơ đồ ở hình 12 tương đương với con lắc kép ở mục trước, với sự tương
ứng như sau:
1 1 2 2
1m L, k , x q , x q .
C
Chọn chiều dương của các dòng điện trong mạch như hình 10, ta có:
22 2
dq
i qdt
, (60)
11 1
dqi q
dt . (61)
Xét mạch điện kín JA1B1KJ và A2B2KJ
11 2
qL(i i ) 0,
C
22 1 2
qLi L(i i ) 0
C ,
hay
11 2
qq q 0,
LC (62)
21 2
qq 2q 0.
LC (63)
Hệ phương trình (62) và (63) mô tả sự biến thiên của q1 và q2 theo thời gian.
Đặt 1 1q A cos t, 2 2q A cos t, trong đó A1 và A2 là các hằng số, rồi thay vào
hai phương trình (62), (63) và chia hai vế cho cos t , ta có:
2 21 2(LC 1)A LC A 0, (64)
2 21 2LC A (2LC 1)A 0. (65)
Điều kiện để hệ phương trình (64) và (65) có nghiệm không tầm thường là định thức của các hệ số bằng không. Điều này dẫn đến
2 2 4 2L C 3LC 1 0 . (66) Giải phương trình trên ta thu được hai nghiệm dương
21,2
1 3 5
2 LC LC, (67)
Tức là có hai giá trị khả dĩ của tần số góc
1
3 5,
2LC
và
2
3 5.
2LC
Kiểu dao động chuẩn thứ nhất
Tần số góc:
1
3 5 1.
2 LC
Tỉ số hệ số:
2
1 12
2 1
A LC 1 5.
A 1 LC 2
B1
A1
B2
A2
q2
C C
L L
q1
2i 1i
i1+i2
K
J
Hình 12
17
Kiểu dao động chuẩn thứ hai
Tần số góc:
2
3 5 1.
2 LC
Tỉ số hệ số:
2
1 22
2 2
A LC 5 1.
A 1 LC 2
Ta thu được các kết quả đúng như trong bài toán con lắc kép. c. Bài toán sử dụng phương trình Lagrange
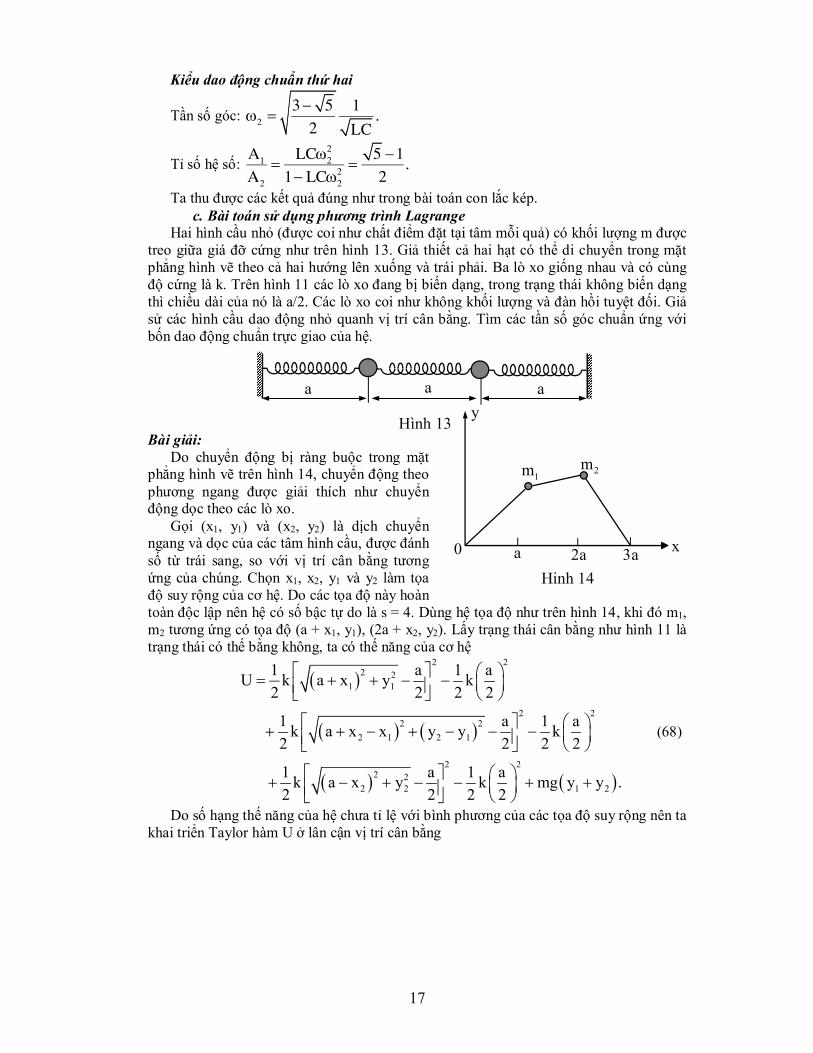
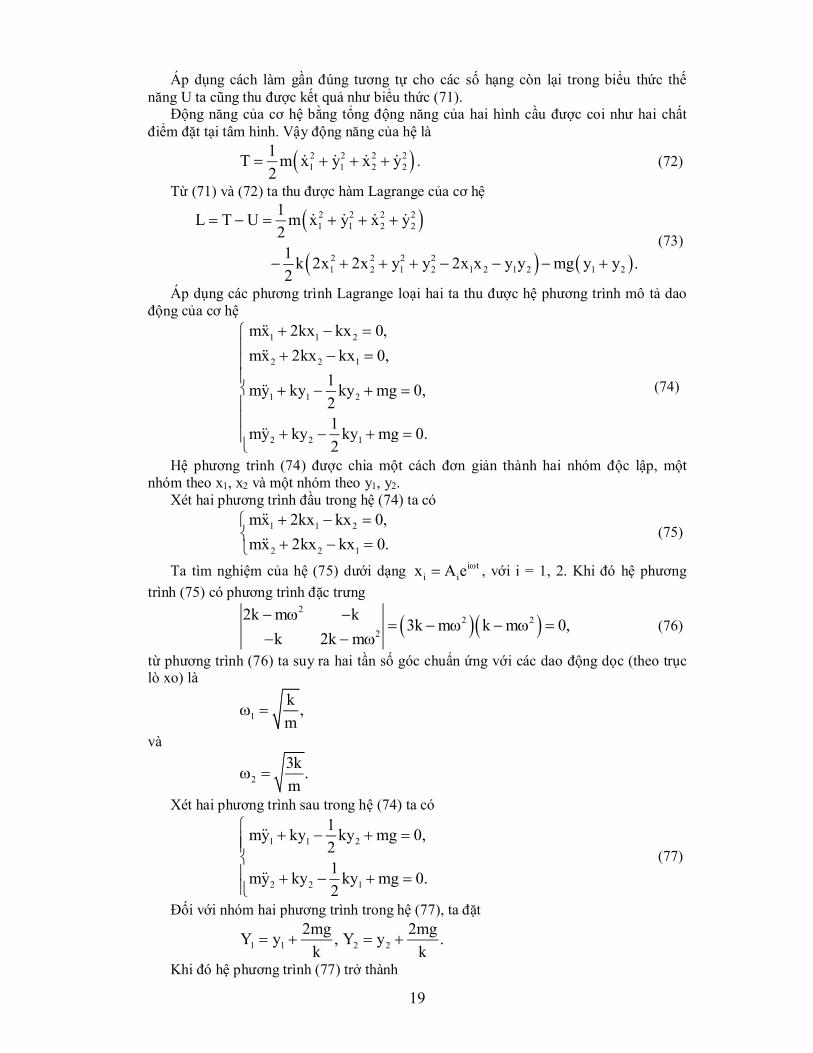
Hai hình cầu nhỏ (được coi như chất điểm đặt tại tâm mỗi quả) có khối lượng m được treo giữa giá đỡ cứng như trên hình 13. Giả thiết cả hai hạt có thể di chuyển trong mặt phẳng hình vẽ theo cả hai hướng lên xuống và trái phải. Ba lò xo giống nhau và có cùng độ cứng là k. Trên hình 11 các lò xo đang bị biến dạng, trong trạng thái không biến dạng thì chiều dài của nó là a/2. Các lò xo coi như không khối lượng và đàn hồi tuyệt đối. Giả sử các hình cầu dao động nhỏ quanh vị trí cân bằng. Tìm các tần số góc chuẩn ứng với bốn dao động chuẩn trực giao của hệ. Bài giải:
Do chuyển động bị ràng buộc trong mặt phẳng hình vẽ trên hình 14, chuyển động theo phương ngang được giải thích như chuyển động dọc theo các lò xo.
Gọi (x1, y1) và (x2, y2) là dịch chuyển ngang và dọc của các tâm hình cầu, được đánh số từ trái sang, so với vị trí cân bằng tương ứng của chúng. Chọn x1, x2, y1 và y2 làm tọa độ suy rộng của cơ hệ. Do các tọa độ này hoàn toàn độc lập nên hệ có số bậc tự do là s = 4. Dùng hệ tọa độ như trên hình 14, khi đó m1, m2 tương ứng có tọa độ (a + x1, y1), (2a + x2, y2). Lấy trạng thái cân bằng như hình 11 là trạng thái có thế bằng không, ta có thế năng của cơ hệ
2 22 2
1 1
2 22 2
2 1 2 1
2 22 2
2 2 1 2
1 a 1 aU k a x y k
2 2 2 2
1 a 1 ak a x x y y k
2 2 2 2
1 a 1 ak a x y k mg y y .
2 2 2 2
(68)
Do số hạng thế năng của hệ chưa tỉ lệ với bình phương của các tọa độ suy rộng nên ta khai triển Taylor hàm U ở lân cận vị trí cân bằng
Hình 13
a a a
1m
a 2a 3a x 0
2m
Hinh 14
y

18
0 1 2 1 2
1 2 1 20 0 0 0
2 2 2 22 2 2 21 2 1 22 2 2 2
1 2 1 20 0 0 0
2 2
1 2
1 2 1 10 0
U U U UU U x x y y
x x y y
1 U 1 U 1 U 1 Ux x y y
2 x 2 x 2 y 2 y
U Ux x
x x x y
2
1 1 1 2
1 2 0
2 2 2
2 1 2 2 1 2
2 1 2 2 1 20 0 0
Ux y x y
x y
U U Ux y x y y y .
x y x y y y
(69)
trong đó
0
1 2 1 20 0 0 0
U U U UU 0; 0; 0; mg; mg;
x x y y
2 2 2 2
2 2 2 21 2 1 20 0 0 0
U U U U2k; 2k; k; k;
x x y y
(70)
2 2 2 2 2 2
1 2 1 1 1 2 2 1 2 2 1 20 0 0 0 0 0
U U U U U U kk; 0; 0; 0; 0; .
x x x y x y x y x y y y 2
Thế các biểu thức (70) vào (69), trong gần đúng cấp 2 theo tọa độ suy rộng ta thu được biểu thức thế năng của hệ có dạng:
2 2 2 21 2 1 2 1 2 1 2 1 2
1U k 2x 2x y y 2x x y y mg y y .
2 (71)
Chú ý: Ngoài cách khai triển của hàm thế năng U theo cách cơ bản ở trên, ta có thể làm cách khác như sau
Xét số hạng sau trong biểu thức thế năng của hệ
2 2
2 21 1 1
22 2 2 2 2 2 2
1 1 1 1 1 1
1 a 1 aU k a x y k
2 2 2 2
1 a 1k a x 2ax y a a x 2ax y ka .
2 4 8
Do trong biểu thức của U1 có biểu thức liên quan tới căn bậc hai nên có thể viết được như sau
12 2 2
2 2 2 2 1 1 11 1 1 2
2 2 22 1 1 1 1
2 2
2 2 2 21 1 1 1
x 2ax ya a x 2ax y a 1
a
1 x 2ax y 1 1 1 4xa 1
2 a 2! 2 2 a
1 1a x 2ax y x .
2 2
Chỉ giữ lại các số hạng cho tới bậc hai ở các đại lượng nhỏ x1 và y1, các biểu thức trên trở thành
2 21 1 1 1
1 1U k x 2ax y .
2 2
19
Áp dụng cách làm gần đúng tương tự cho các số hạng còn lại trong biểu thức thế năng U ta cũng thu được kết quả như biểu thức (71).
Động năng của cơ hệ bằng tổng động năng của hai hình cầu được coi như hai chất điểm đặt tại tâm hình. Vậy động năng của hệ là
2 2 2 21 1 2 2
1T m x y x y
2 . (72)
Từ (71) và (72) ta thu được hàm Lagrange của cơ hệ
2 2 2 21 1 2 2
2 2 2 21 2 1 2 1 2 1 2 1 2
1L T U m x y x y
2
1k 2x 2x y y 2x x y y mg y y .
2
(73)
Áp dụng các phương trình Lagrange loại hai ta thu được hệ phương trình mô tả dao động của cơ hệ
1 1 2
2 2 1
1 1 2
2 2 1
mx 2kx kx 0,
mx 2kx kx 0,
1my ky ky mg 0,
2
1my ky ky mg 0.
2
(74)
Hệ phương trình (74) được chia một cách đơn giản thành hai nhóm độc lập, một nhóm theo x1, x2 và một nhóm theo y1, y2.
Xét hai phương trình đầu trong hệ (74) ta có
1 1 2
2 2 1
mx 2kx kx 0,
mx 2kx kx 0.
(75)
Ta tìm nghiệm của hệ (75) dưới dạng i ti ix A e , với i = 1, 2. Khi đó hệ phương
trình (75) có phương trình đặc trưng
2
2 2
2
2k m k3k m k m 0,
k 2k m
(76)
từ phương trình (76) ta suy ra hai tần số góc chuẩn ứng với các dao động dọc (theo trục lò xo) là
1
k,
m
và
2
3k.
m
Xét hai phương trình sau trong hệ (74) ta có
1 1 2
2 2 1
1my ky ky mg 0,
2
1my ky ky mg 0.
2
(77)
Đối với nhóm hai phương trình trong hệ (77), ta đặt
1 1 2 2
2mg 2mgY y , Y y .
k k
Khi đó hệ phương trình (77) trở thành
20
m m m m m m m 0 a 2a (j - 1)a ja (j + 1)a (n - 1)a na (n +1 )a
=L
1 2 j -1 j j +1 n - 1 n
Hình 15
1 1 2
2 2 1
1mY kY kY 0,
2
1mY kY kY 0.
2
(78)
Tương tự, ta tìm nghiệm của hệ (78) dưới dạng i ti iY B e , với i = 1, 2. Khi đó hệ
phương trình (78) có phương trình đặc trưng
2
2 2
2
kk m
3 12 k m k m 0,k 2 2
k m2
(79)
từ phương trình (79) ta suy ra hai tần số góc chuẩn ứng với các dao động thẳng đứng hay dao động ngang (theo phương vuông góc với trục lò xo) là
3
k,
2m
và
4
3k.
2m
IV. ỨNG DỤNG CỦA DAO ĐỘNG LIÊN KẾT
1. Dao động liên kết của sợi dây có khối lượng. Phương trình sóng. a. Dao động liên kết của sợi dây có khối lượng.
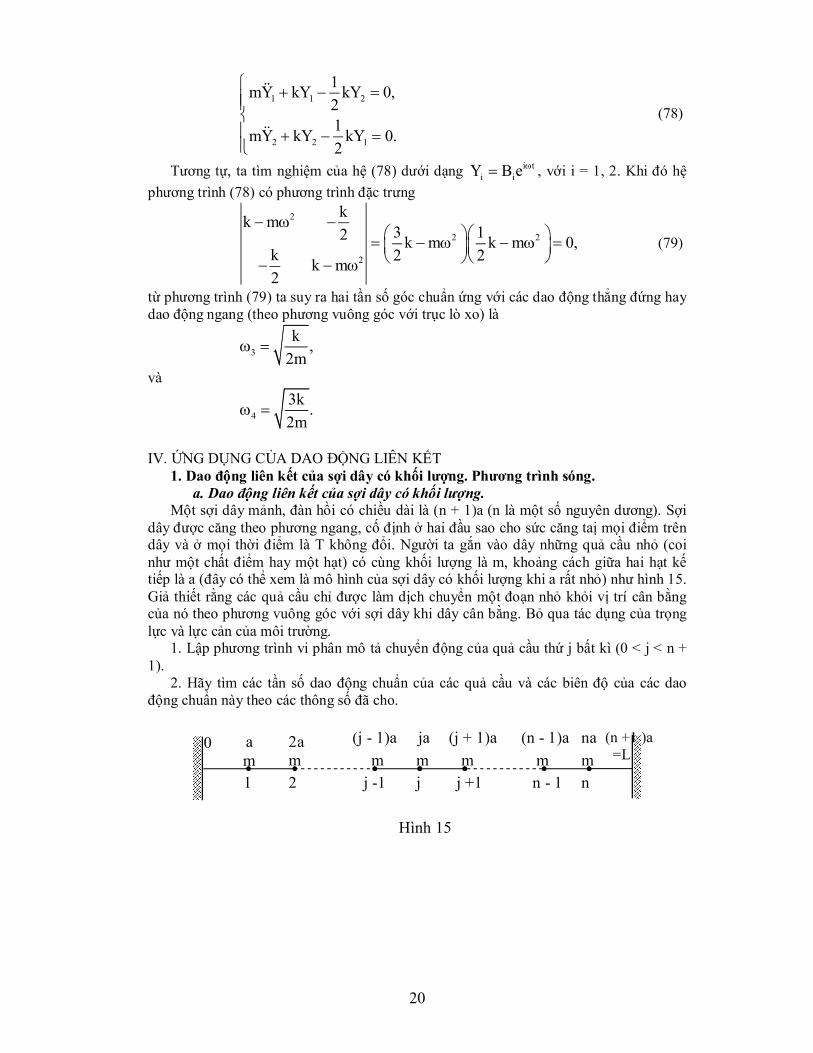
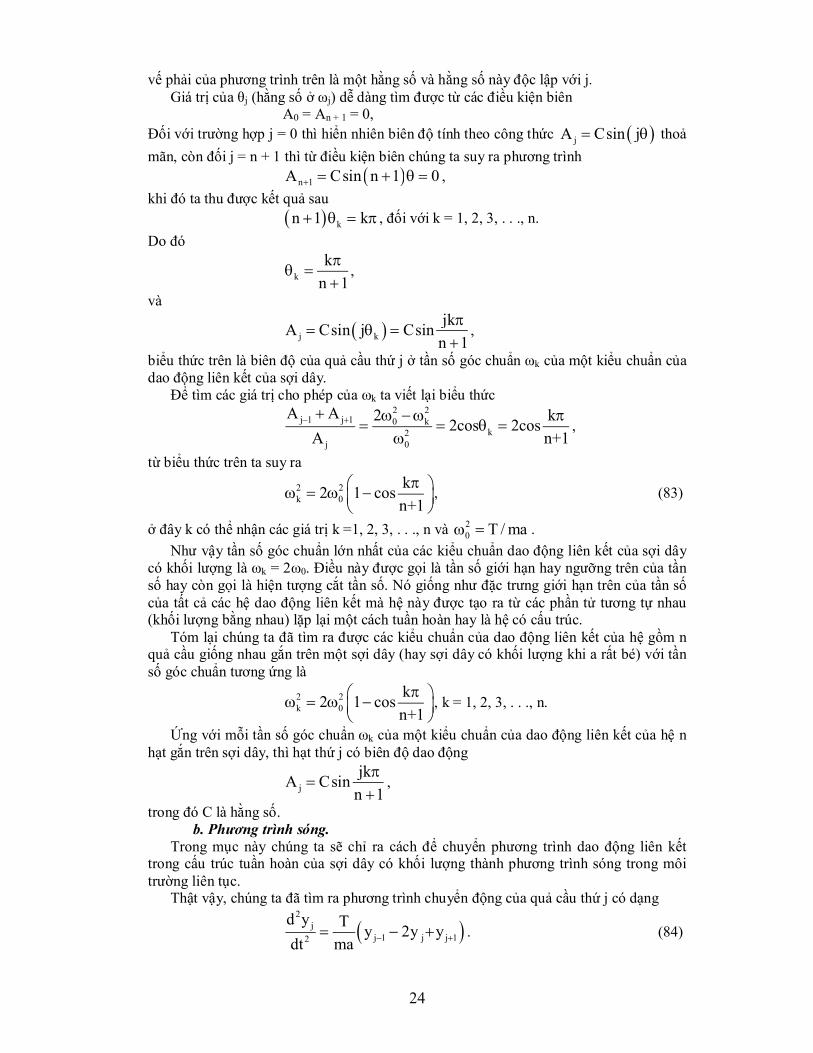
Một sợi dây mảnh, đàn hồi có chiều dài là (n + 1)a (n là một số nguyên dương). Sợi dây được căng theo phương ngang, cố định ở hai đầu sao cho sức căng taị mọi điểm trên dây và ở mọi thời điểm là T không đổi. Người ta gắn vào dây những quả cầu nhỏ (coi như một chất điểm hay một hạt) có cùng khối lượng là m, khoảng cách giữa hai hạt kế tiếp là a (đây có thể xem là mô hình của sợi dây có khối lượng khi a rất nhỏ) như hình 15. Giả thiết rằng các quả cầu chỉ được làm dịch chuyển một đoạn nhỏ khỏi vị trí cân bằng của nó theo phương vuông góc với sợi dây khi dây cân bằng. Bỏ qua tác dụng của trọng lực và lực cản của môi trường.
1. Lập phương trình vi phân mô tả chuyển động của quả cầu thứ j bất kì (0 < j < n + 1).
2. Hãy tìm các tần số dao động chuẩn của các quả cầu và các biên độ của các dao động chuẩn này theo các thông số đã cho.
21
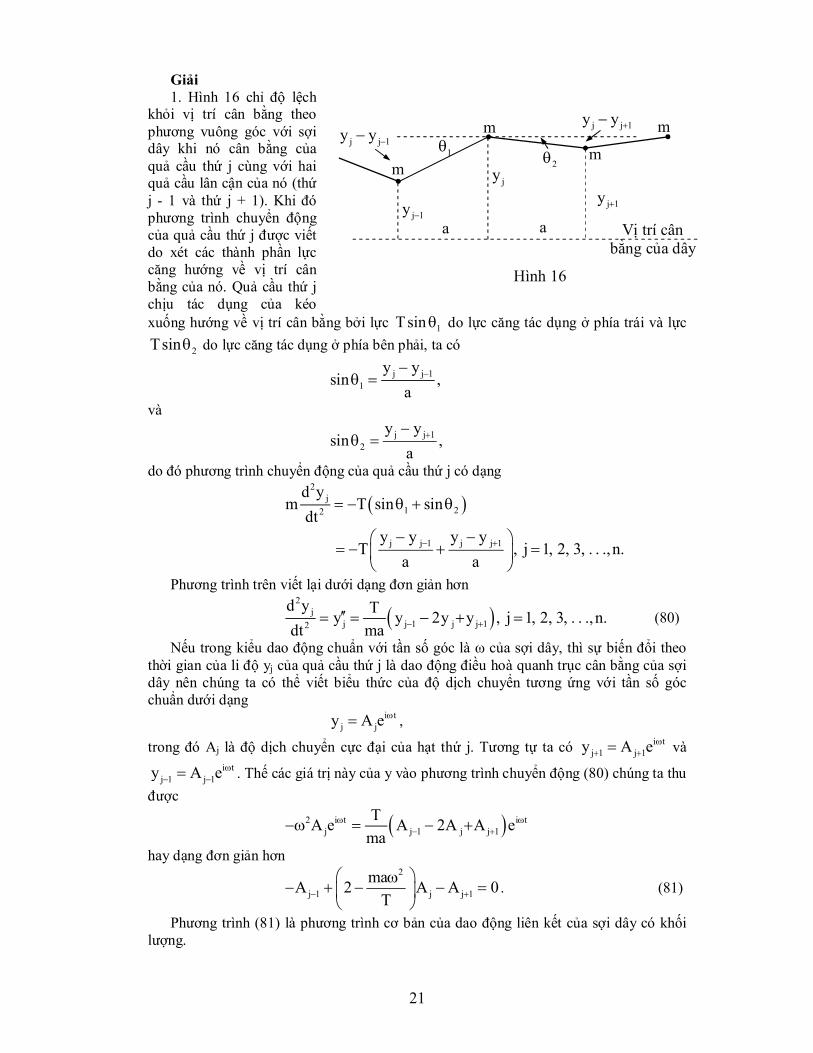
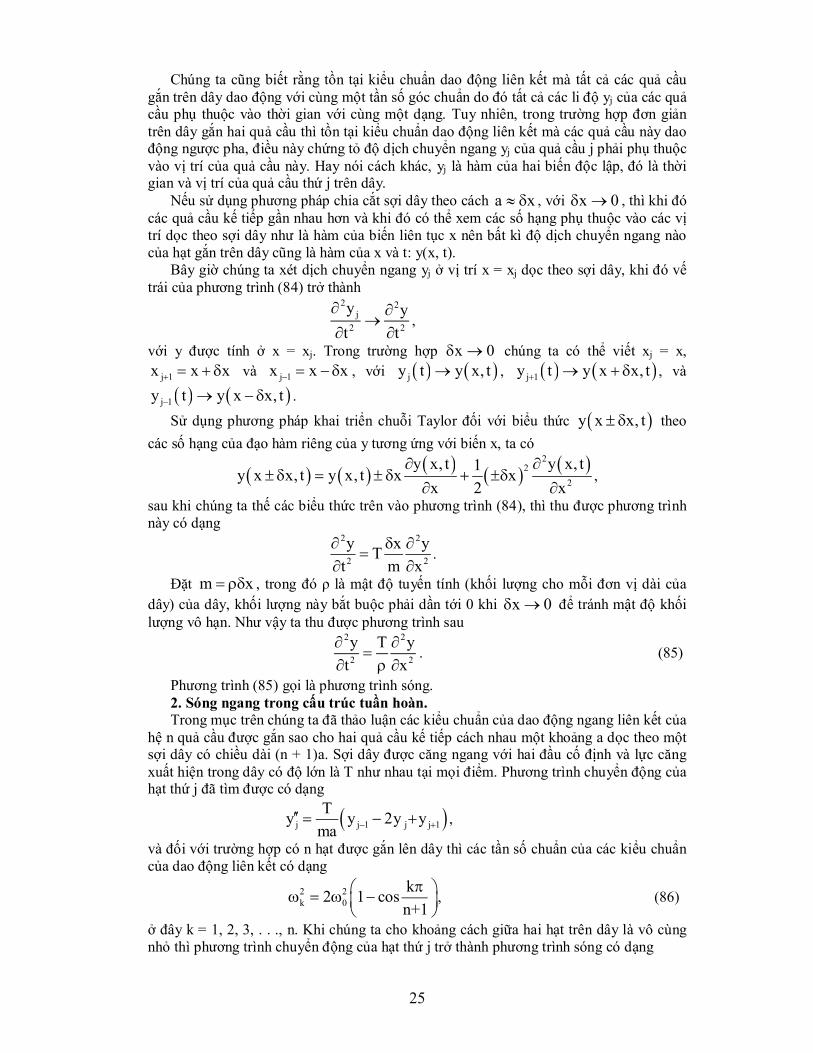
Giải 1. Hình 16 chỉ độ lệch
khỏi vị trí cân bằng theo phương vuông góc với sợi dây khi nó cân bằng của quả cầu thứ j cùng với hai quả cầu lân cận của nó (thứ j - 1 và thứ j + 1). Khi đó phương trình chuyển động của quả cầu thứ j được viết do xét các thành phần lực căng hướng về vị trí cân bằng của nó. Quả cầu thứ j chịu tác dụng của kéo xuống hướng về vị trí cân bằng bởi lực 1Tsin do lực căng tác dụng ở phía trái và lực
2Tsin do lực căng tác dụng ở phía bên phải, ta có
j j 1
1
y ysin ,
a
và
j j 1
2
y ysin ,
a
do đó phương trình chuyển động của quả cầu thứ j có dạng
2
j
1 22
d ym T sin sin
dt
j j 1 j j 1y y y y
T , j 1, 2, 3, . . .,n.a a
Phương trình trên viết lại dưới dạng đơn giản hơn
2
j
j j 1 j j 12
d y Ty y 2y y , j 1, 2, 3, . . .,n.
dt ma
(80)
Nếu trong kiểu dao động chuẩn với tần số góc là ω của sợi dây, thì sự biến đổi theo thời gian của li độ yj của quả cầu thứ j là dao động điều hoà quanh trục cân bằng của sợi dây nên chúng ta có thể viết biểu thức của độ dịch chuyển tương ứng với tần số góc chuẩn dưới dạng
i tj jy A e ,
trong đó Aj là độ dịch chuyển cực đại của hạt thứ j. Tương tự ta có i tj 1 j 1y A e và
i tj 1 j 1y A e . Thế các giá trị này của y vào phương trình chuyển động (80) chúng ta thu
được
2 i t i tj j 1 j j 1
TA e A 2A A e
ma
hay dạng đơn giản hơn
2
j 1 j j 1
maA 2 A A 0
T
. (81)
Phương trình (81) là phương trình cơ bản của dao động liên kết của sợi dây có khối lượng.
m
m
m
m
j 1y
jy
j 1y
j j 1y y j j 1y y
a a
1 2
Vị trí cân bằng của dây
Hình 16
22
Bây giờ chúng ta tiến hành theo một trình tự là bắt đầu từ quả cầu thứ nhất rồi tiến dọc theo sợi dây, viết ra các phương trình tương tự cho quả cầu thứ j với các giá trị cụ thể j = 1, 2, 3, . . ., n. Cần chú ý rằng hai đầu dây cố định nên
0 0y A 0 và n 1 n 1y A 0 .
Theo cách đó ta thấy, khi j = 1 thì phương trình (81) trở thành
2
1 2 0
ma2 A A 0 A 0
T
.
Khi j = 2 chúng ta thu được phương trình
2
1 2 3
maA 2 A A 0
T
,
và khi j = n thì phương trình (81) trở thành
2
n 1 n n 1
maA 2 A 0 A 0
T
.
Như vậy chúng ta thu được một hệ gồm n phương trình do đó khi giải hệ phương trình này chúng ta sẽ thu được n giá trị khác nhau của ω2, mỗi giá trị của ω sẽ là tần số góc chuẩn của một kiểu chuẩn của dao động liên kết của sợi dây. Vậy số kiểu dao động chuẩn bằng số quả cầu được gắn trên sợi dây.
Cách thức chuẩn để giải hệ gồm n phương trình đã được trình bày trong lí thuyết ma trận. Tuy nhiên chúng ta có thể dễ dàng giải trong một số trường hợp đơn giản gồm một hoặc hai quả cầu gắn lên sợi dây từ đó chúng ta có thể chỉ ra cách thức giải trong trường hợp có n quả cầu gắn lên sợi dây mà không cần sử dụng công cụ toán học phức tạp.
Thật vậy, trước tiên chúng ta xét trường hợp đơn giản nhất là có một quả cầu gắn lên sợi dây và dây có chiều dài là 2a, khi đó chúng ta chỉ cần duy nhất phương trình đối với trường hợp j = 1, đồng thời cần nhớ rằng hai đầu dây cố định nên A0 = A2 = 0. Do đó chúng ta thu được phương trình mô tả dao động của sợi dây
2
1
ma2 A 0
T
,
từ phương trình trên chúng ta suy ra trong trường hợp này chỉ có duy nhất một tần số chuẩn của kiểu chuẩn của dao động của quả cầu gắn trên dây
2 2T.
ma
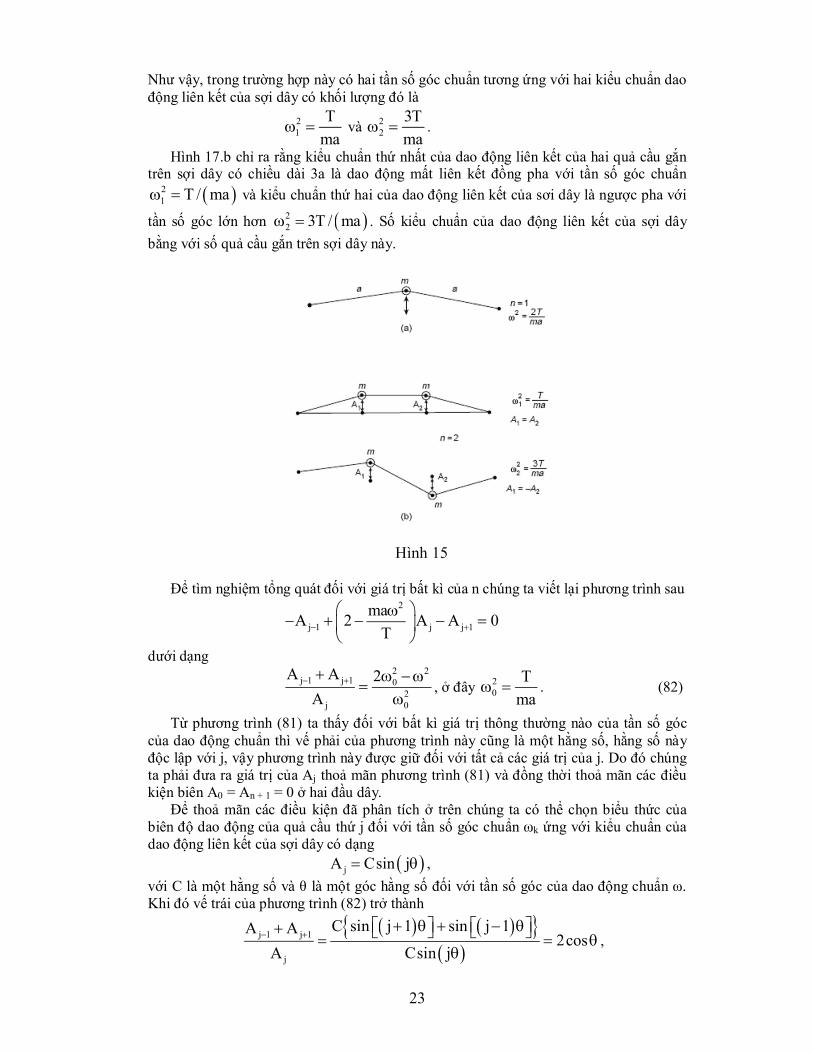
Dao động chuẩn của một quả cầu gắn lên sợi dây có chiều dài 2a với tần số góc
2 2T / ma được mô tả trên hình 17.a.
Khi n = 2, chiều dài của sợi dây là 3a, chúng ta cần các phương trình với j = 1 và j = 2. Đó là các phương trình
2
1 2
ma2 A A 0
T
,
và
2
1 2 0 3
maA 2 A 0 A A 0
T
.
Rút A1 hoặc A2 từ phương trình này thế vào phương trính kia chúng ta thu được phương trình xác định tần số góc của các dao động chuẩn của sợi dây
22 2 2ma ma ma2 1 0 2 1 2 1 0
T T T
.
23
Như vậy, trong trường hợp này có hai tần số góc chuẩn tương ứng với hai kiểu chuẩn dao động liên kết của sợi dây có khối lượng đó là
21
T
ma và 2
2
3T
ma .
Hình 17.b chỉ ra rằng kiểu chuẩn thứ nhất của dao động liên kết của hai quả cầu gắn trên sợi dây có chiều dài 3a là dao động mất liên kết đồng pha với tần số góc chuẩn
21 T / ma và kiểu chuẩn thứ hai của dao động liên kết của sơi dây là ngược pha với
tần số góc lớn hơn 22 3T / ma . Số kiểu chuẩn của dao động liên kết của sợi dây
bằng với số quả cầu gắn trên sợi dây này.
Để tìm nghiệm tổng quát đối với giá trị bất kì của n chúng ta viết lại phương trình sau
2
j 1 j j 1
maA 2 A A 0
T
dưới dạng
2 2
j 1 j 1 02
j 0
A A 2
A
, ở đây 2
0
T
ma . (82)
Từ phương trình (81) ta thấy đối với bất kì giá trị thông thường nào của tần số góc của dao động chuẩn thì vế phải của phương trình này cũng là một hằng số, hằng số này độc lập với j, vậy phương trình này được giữ đối với tất cả các giá trị của j. Do đó chúng ta phải đưa ra giá trị của Aj thoả mãn phương trình (81) và đồng thời thoả mãn các điều kiện biên A0 = An + 1 = 0 ở hai đầu dây.
Để thoả mãn các điều kiện đã phân tích ở trên chúng ta có thể chọn biểu thức của biên độ dao động của quả cầu thứ j đối với tần số góc chuẩn ωk ứng với kiểu chuẩn của dao động liên kết của sợi dây có dạng
jA Csin j ,
với C là một hằng số và θ là một góc hằng số đối với tần số góc của dao động chuẩn ω. Khi đó vế trái của phương trình (82) trở thành
j 1 j 1
j
C sin j 1 sin j 1A A2cos
A Csin j
,
Hình 15
24
vế phải của phương trình trên là một hằng số và hằng số này độc lập với j. Giá trị của θj (hằng số ở ωj) dễ dàng tìm được từ các điều kiện biên A0 = An + 1 = 0,
Đối với trường hợp j = 0 thì hiển nhiên biên độ tính theo công thức jA Csin j thoả
mãn, còn đối j = n + 1 thì từ điều kiện biên chúng ta suy ra phương trình
n 1A Csin n 1 0 ,
khi đó ta thu được kết quả sau
kn 1 k , đối với k = 1, 2, 3, . . ., n.
Do đó
k
k
n 1
,
và
j k
jkA Csin j Csin
n 1
,
biểu thức trên là biên độ của quả cầu thứ j ở tần số góc chuẩn ωk của một kiểu chuẩn của dao động liên kết của sợi dây.
Để tìm các giá trị cho phép của ωk ta viết lại biểu thức
2 2
j 1 j 1 0 kk2
j 0
A A 2 k2cos 2cos
A n+1
,
từ biểu thức trên ta suy ra
2 2k 0
k2 1 cos
n+1
, (83)
ở đây k có thể nhận các giá trị k =1, 2, 3, . . ., n và 20 T / ma .
Như vậy tần số góc chuẩn lớn nhất của các kiểu chuẩn dao động liên kết của sợi dây có khối lượng là ωk = 2ω0. Điều này được gọi là tần số giới hạn hay ngưỡng trên của tần số hay còn gọi là hiện tượng cắt tần số. Nó giống như đặc trưng giới hạn trên của tần số của tất cả các hệ dao động liên kết mà hệ này được tạo ra từ các phần tử tương tự nhau (khối lượng bằng nhau) lặp lại một cách tuần hoàn hay là hệ có cấu trúc.
Tóm lại chúng ta đã tìm ra được các kiểu chuẩn của dao động liên kết của hệ gồm n quả cầu giống nhau gắn trên một sợi dây (hay sợi dây có khối lượng khi a rất bé) với tần số góc chuẩn tương ứng là
2 2k 0
k2 1 cos
n+1
, k = 1, 2, 3, . . ., n.
Ứng với mỗi tần số góc chuẩn ωk của một kiểu chuẩn của dao động liên kết của hệ n hạt gắn trên sợi dây, thì hạt thứ j có biên độ dao động
j
jkA Csin
n 1
,
trong đó C là hằng số. b. Phương trình sóng.
Trong mục này chúng ta sẽ chỉ ra cách để chuyển phương trình dao động liên kết trong cấu trúc tuần hoàn của sợi dây có khối lượng thành phương trình sóng trong môi trường liên tục.
Thật vậy, chúng ta đã tìm ra phương trình chuyển động của quả cầu thứ j có dạng
2
j
j 1 j j 12
d y Ty 2y y
dt ma . (84)
25
Chúng ta cũng biết rằng tồn tại kiểu chuẩn dao động liên kết mà tất cả các quả cầu gắn trên dây dao động với cùng một tần số góc chuẩn do đó tất cả các li độ yj của các quả cầu phụ thuộc vào thời gian với cùng một dạng. Tuy nhiên, trong trường hợp đơn giản trên dây gắn hai quả cầu thì tồn tại kiểu chuẩn dao động liên kết mà các quả cầu này dao động ngược pha, điều này chứng tỏ độ dịch chuyển ngang yj của quả cầu j phải phụ thuộc vào vị trí của quả cầu này. Hay nói cách khác, yj là hàm của hai biến độc lập, đó là thời gian và vị trí của quả cầu thứ j trên dây.
Nếu sử dụng phương pháp chia cắt sợi dây theo cách a x , với x 0 , thì khi đó các quả cầu kế tiếp gần nhau hơn và khi đó có thể xem các số hạng phụ thuộc vào các vị trí dọc theo sợi dây như là hàm của biến liên tục x nên bất kì độ dịch chuyển ngang nào của hạt gắn trên dây cũng là hàm của x và t: y(x, t).
Bây giờ chúng ta xét dịch chuyển ngang yj ở vị trí x = xj dọc theo sợi dây, khi đó vế trái của phương trình (84) trở thành
2 2j
2 2
y y
t t
,
với y được tính ở x = xj. Trong trường hợp x 0 chúng ta có thể viết xj = x,
j 1x x x và j 1x x x , với jy t y x, t , j 1y t y x x, t , và
j 1y t y x x, t .
Sử dụng phương pháp khai triển chuỗi Taylor đối với biểu thức y x x, t theo
các số hạng của đạo hàm riêng của y tương ứng với biến x, ta có
2
2
2
y x, t y x, t1y x x, t y x, t x x
x 2 x
,
sau khi chúng ta thế các biểu thức trên vào phương trình (84), thì thu được phương trình này có dạng
2 2
2 2
y x yT
t m x
.
Đặt m x , trong đó ρ là mật độ tuyến tính (khối lượng cho mỗi đơn vị dài của
dây) của dây, khối lượng này bắt buộc phải dần tới 0 khi x 0 để tránh mật độ khối lượng vô hạn. Như vậy ta thu được phương trình sau
2 2
2 2
y T y
t x
. (85)
Phương trình (85) gọi là phương trình sóng. 2. Sóng ngang trong cấu trúc tuần hoàn. Trong mục trên chúng ta đã thảo luận các kiểu chuẩn của dao động ngang liên kết của
hệ n quả cầu được gắn sao cho hai quả cầu kế tiếp cách nhau một khoảng a dọc theo một sợi dây có chiều dài (n + 1)a. Sợi dây được căng ngang với hai đầu cố định và lực căng xuất hiện trong dây có độ lớn là T như nhau tại mọi điểm. Phương trình chuyển động của hạt thứ j đã tìm được có dạng
j j 1 j j 1
Ty y 2y y
ma
,
và đối với trường hợp có n hạt được gắn lên dây thì các tần số chuẩn của các kiểu chuẩn của dao động liên kết có dạng
2 2k 0
k2 1 cos
n+1
, (86)
ở đây k = 1, 2, 3, . . ., n. Khi chúng ta cho khoảng cách giữa hai hạt trên dây là vô cùng nhỏ thì phương trình chuyển động của hạt thứ j trở thành phương trình sóng có dạng
26
2 2
2 2
y T y
t x
,
m / x trong phương trình sóng trên là mật độ tuyến tính và
i t kxy e
.
Bây giờ chúng ta xét sự truyền sóng ngang dọc theo một dãy các nguyên tử thẳng hàng, khối lượng m, trong mạng tinh thể, ở đây lực căng được thay bằng lực đàn hồi giữa các nguyên tử (như vậy T/a là hệ số đàn hồi), và a là khoảng cách giữa các nguyên tử cỡ khoảng 1 A0 hoặc 10-10 m. Đồng thời hiện tượng hai đầu dây được kẹp cố định được thay thế bởi hai đầu của tinh thể khi đó chúng ta có thể biểu diễn độ dịch chuyển của hạt thứ j do sóng ngang truyền trên dây gây ra dưới dạng
i t kx i t kja
j j jy A e A e
,
do x = ja. Phương trình chuyển động trở thành
2 24T kam sin
a 2
từ biểu thức trên chúng ta dễ dàng suy ra các tần số của sóng ngang được phép truyền qua sợi dây
2 24T kasin
ma 2
. (87)
Biểu thức của ω2 trong công thức (87) hoàn toàn tương đương với biểu thức của tần số góc chuẩn tương ứng với kiểu chuẩn của dao động liên kết của n quả cầu được gắn trên sợi dây
2 2j
2T j 4T j1 cos sin
ma n+1 ma 2 n+1
. (88)
nếu
ka j
2 2 n 1
,
trong đó j = 1, 2, 3, . . ., n. Nhưng (n + 1)a = l là chiều dài của sợi dây hoặc của dãy tinh thể, và chúng ta thấy rằng
các bước sóng được phép ở đây là p / 2 = n +1 a l .
Do đó
ka 2 a a ja j a.
2 2 2 n 1 a p
.
Khi j = p, đơn vị thay đổi trong j tương ứng từ một số giá trị cho phép của một nửa số lần bước sóng đến giá trị nhỏ nhất của bước sóng là λ = 2a, dẫn đến giá trị lớn nhất của
tần số góc 2m 4T / ma . Như vậy cả hai hệ thức có thể được xem xét tương đượng.
Khi λ = 2a, sin(ka/2) = 1 bởi vì ka = π, và các nguyên tử cạnh nhau có độ lệch pha chính xác là π vì
j ika i
j 1
ye e 1
y
.
Như vậy tần số cao nhất là phù hợp với liên kết lớn nhất, điều này đúng như chúng ta mong muốn.

27
Nếu trong phương trình (87) chúng ta vẽ sin ka / 2 theo k (Hình 16) chúng ta tìm
thấy rằng khi ka được tăng đến tận giá trị π, hệ thức pha là giống như đối với giá trị âm của ka đạt đến giá trị - π. Đây chính là cơ sở đầy đủ để ta hạn chế giá trị của k trong miền
ka a
,
điều này dẫn đến chúng giống như vùng (miền) Brillouin thứ nhất. Đối với sóng dài hoặc giá trị của số sóng k là nhỏ khi đó sin(ka/2) ka/2 nên
2 2
2 4T k a
ma 4 ,
và vận tốc của sóng hay còn gọi là tốc độ của sóng được đưa ra trong biểu thức có dạng
2
2
2
Ta Tc
k m
,
cũng giống như trước, trong biểu thức trên ρ = m/a. Trong trường hợp chung vận tốc pha của sóng được xác định bởi công thức
sin ka / 2
v ck ka / 2
,
cùng với hệ thức tán sắc đã được chỉ ra trên hình (17) ta thấy chỉ có một miền bước sóng hẹp mà cấu trúc không gian của tinh thể ảnh hưởng lên quá trình truyền sóng, và giới hạn lớn nhất của
số sóng 10 1mk / a 10 m .
3. Sóng ngang trong mạng một chiều gồm hai loại nguyên tử trong tinh thể Iôn. Trong mục này chúng ta tiếp tục trình bày ứng dụng dao động liên kết của sợi dây có
khối lượng để nghiên cứu mạng tinh thể một chiều gồm hai loại nguyên tử trong tinh thể iôn. Chúng ta giả thiết rằng các nguyên tử như những quả cầu có khối lượng được gắn trên dây cùng với khoảng cách giữa hai quả cầu là a giống như trước. Các nguyên tử có
Hình 16
Hình 17
28
khối lượng M chiếm các vị trí lẻ: 2j + 1 và các nguyên tử có khối lượng m chiếm vị trí chẵn: 2j. Khi đó phương trình chuyển động cho mỗi loại có dạng
2 j 2 j 1 2 j 1 2 j
Tmy y y 2y
a
,
và
2 j 1 2 j 2 2 j 2 j 1
TMy y y 2y
a
.
Chúng ta tìm nghiệm của hệ trên dưới dạng
i t 2 jka
2 j my A e
,
i t 2 j 1 ka
2 j 1 My A e
,
trong đó Am và AM là các biên độ của các loại nguyên tử có khối lượng tương ứng. Thế các nghiệm vào các phương trình chuyển động trên ta thu được kết quả
2 ika ikam M m
T 2TmA A e e A
a a ,
và
2 ika ikaM m M
T 2TmA A e e A
a a .
Điều kiện để hệ hai phương trình trên có nghiệm không tầm thường là
1/ 22
2 2T 1 1 T 1 1 4sin ka
a m M a m M mM
. (89)
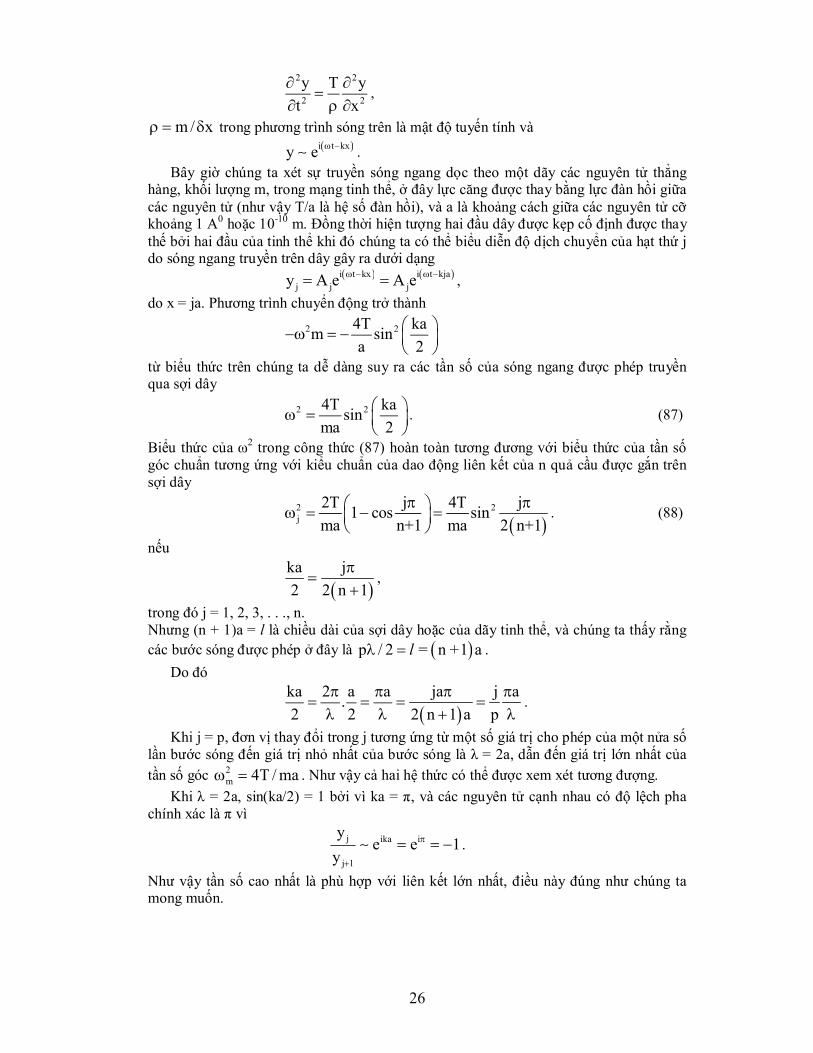
Đồ thị hệ thức tán sắc của ω theo k đối với trường hợp dấu cộng và m > M là đường cong nhánh trên trong hình 18 với
2 2T 1 1
a m M
đối với k = 0,
và
2 2T
aM đối với mk
2a
(giá trị nhỏ nhất của λ = 4a).
Trường hợp dấu trừ trong phương trình 89 tương ứng với nhánh dưới của đồ thị trên
hình 18 với
Nhánh quang
Nhánhâm
Hình 18
29
2 22Tak
m M
đối với số sóng k rất nhỏ,
và
2 2T
am đối với k
2a
.
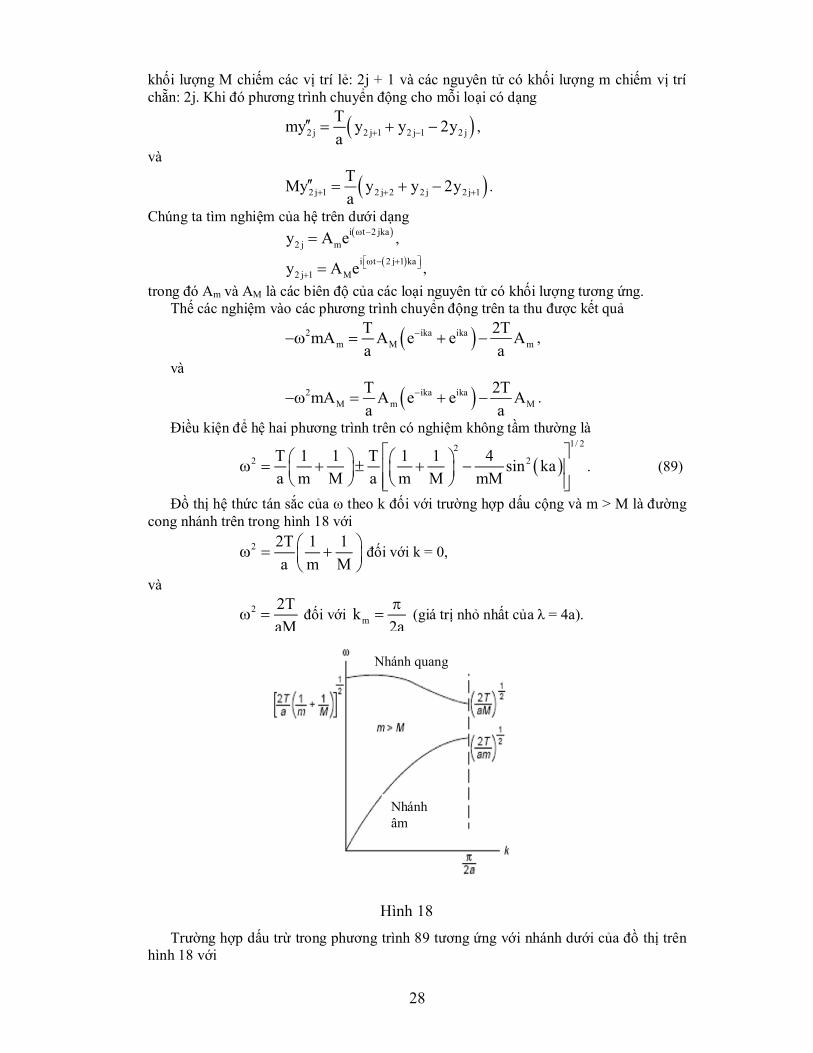
Chuyển động của hai loại của nguyên tử đối với mỗi nhánh được chỉ ra trên hình 19.
4. Sự hấp thụ bức xạ hồng ngoại bởi các tinh thể Iôn
Bức xạ hồng ngoại có tần số 123.10 Hz nên bước sóng của nó là 100 μm và số sóng 4 1k 2 / 6.10 m . Chúng ta đã biết tần số lớn nhất trong dao động mạng tinh thể
một chiều dẫn đến số sóng lớn nhất tương ứng là 10 1mk 10 m , do đó giá trị của số sóng
k đối với tia hồng ngoại là rất bé so với km nên có thể coi nó bằng không. Khi các iôn có điện tích trái dấu cùng độ lớn e di chuyển dưới ảnh hưởng của véctơ cường độ điện
trường i t0E E e của bức xạ điện từ, khi đó phương trình chuyển động của hai loại tinh
thể iôn có dạng (k = 0)
2m M m 0
2TmA A A eE
a ,
và
2M M m 0
2TMA A A eE
a .
Giải hệ phương trình trên ta thu được nghiệm
0M 2 2
0
eEA
M
, và
0
m 2 2
0
eEA
m
,
trong đó
20
2T 1 1
a m M
là tần số giới hạn của nhánh quang học khi k nhỏ (k = 0). Từ các biểu thức biên độ trên cho ta thấy khi ω = ω0 thì bức xạ hồng ngoại bị hấp thụ
mạnh nhất bởi các tinh thể iôn và biên độ AM và Am tăng lên. Thực nghiệm chỉ ra rằng muối ăn (NaCl) hấp thụ mạnh nhất bức xạ ở bước sóng λ = 62 μm, KCl hấp thụ mạnh nhất bức xạ ở bước sóng λ = 71 μm.
Kiểu dao động quang
Kiểu dao động âm
Hình 19
30
BÀI TẬP
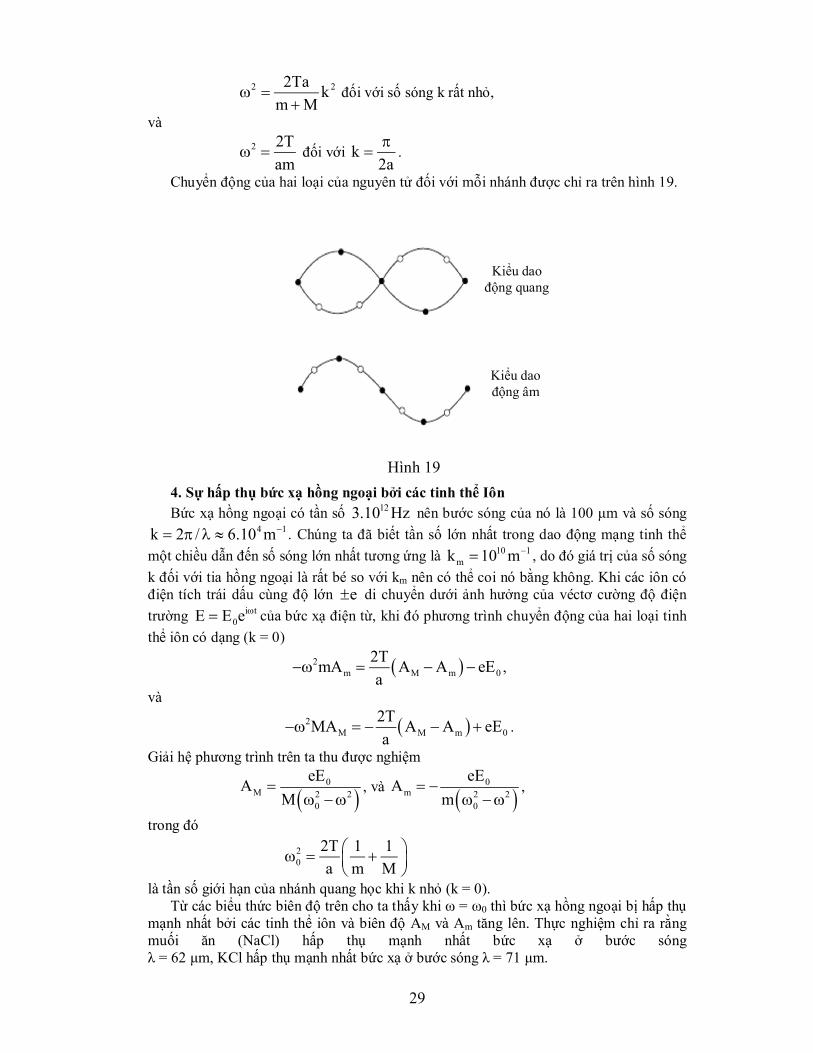
Bài 1. Hai quả nặng M và N, được coi như hai chất điểm, có khối lượng tương ứng là m1 và m2. Chúng được nối với nhau bằng một lò xo có độ cứng k2, và nối với hai điểm cố định P, Q bằng hai lò xo có cùng độ cứng k1 như trên hình 20. Các quả nặng trượt không ma sát trên một trục nằm ngang. Ta gọi x và y là các độ dời khỏi vị trí cân bằng lần lượt của các quả nặng M và N.
1. Giả sử quả nặng lệch khỏi vị trí cân bằng của chúng: a. Hãy viết phương trình động lực học mô tả chuyển động của các quả nặng. b. Xác định các tần số đặc trưng của hệ. c. Tìm biểu thức x(t) và y(t) cho độ dời của các quả nặng theo thời gian trong trường hợp m1 = m2 = m.
2. Giả sử m1 = m2 = m. Cho một ngoại lực điều hòa F = F0cost hướng theo trục, tác dụng lên N. Giả thiết có một lực ma sát nhỏ tác dụng lên các quả nặng, sao cho sau một giai đoạn chuyển tiếp kể từ khi lực điều hòa bắt đầu tác dụng, hệ sẽ dao động ổn định với tần số của ngoại lực.
a. Tính biên độ dao động của các quả nặng theo tần số của ngoại lực và các tần số đặc trưng của hệ. b. Phác họa dạng biến thiên biên độ dao động của quả nặng N theo tần số của ngoại lực.
Đáp số và gợi ý:
1. a.
1 2 2
1 1
1 2 2
2 2
k k kx x y
m m
k k ky y x
m m
b) 1 21 1 2
1 2
m m 1(k k ) ,
2m m 2
và
1 22 1 2
1 2
m m 1(k k ) ,
2m m 2
trong đó
22
21 2 21 2
1 2 1 2
m m 4k(k k )
m m m m
.
c) 1 1 2 2
1x t Acos t Bcos t ,
2
và
1 1 2 2
1y t Acos t Bcos t ,
2
trong đó
11
k,
m 1 2
2
k 2k
m
,
m1 k1 k2 k1 m2
M
P
N
Q
Hình 20
31
các hằng số A, B, 1 và 2 được xác định từ các điều kiện ban đầu.
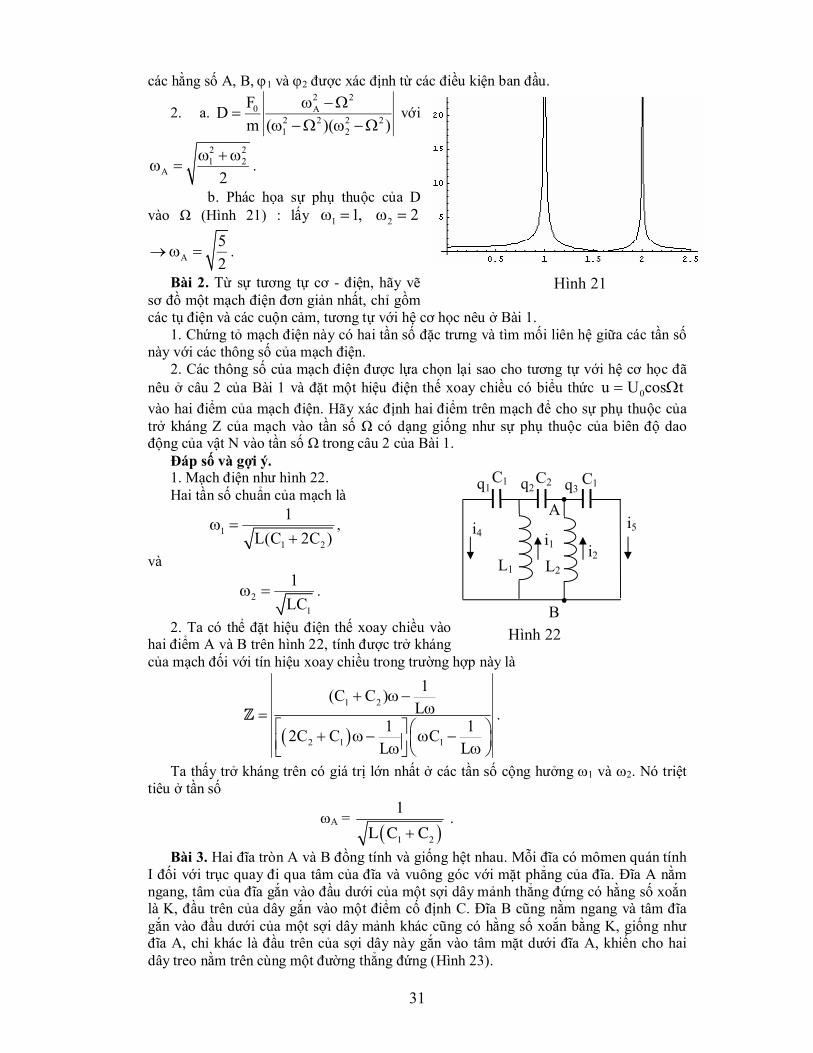
2. a. 2 2
0 A2 2 2 21 2
FD
m ( )( )
với
2 21 2
A2
.
b. Phác họa sự phụ thuộc của D vào Ω (Hình 21) : lấy 1 1, 2 2
A
5
2 .
Bài 2. Từ sự tương tự cơ - điện, hãy vẽ sơ đồ một mạch điện đơn giản nhất, chỉ gồm các tụ điện và các cuộn cảm, tương tự với hệ cơ học nêu ở Bài 1.
1. Chứng tỏ mạch điện này có hai tần số đặc trưng và tìm mối liên hệ giữa các tần số này với các thông số của mạch điện.
2. Các thông số của mạch điện được lựa chọn lại sao cho tương tự với hệ cơ học đã nêu ở câu 2 của Bài 1 và đặt một hiệu điện thế xoay chiều có biểu thức 0u U cos t
vào hai điểm của mạch điện. Hãy xác định hai điểm trên mạch để cho sự phụ thuộc của trở kháng Z của mạch vào tần số Ω có dạng giống như sự phụ thuộc của biên độ dao động của vật N vào tần số Ω trong câu 2 của Bài 1.
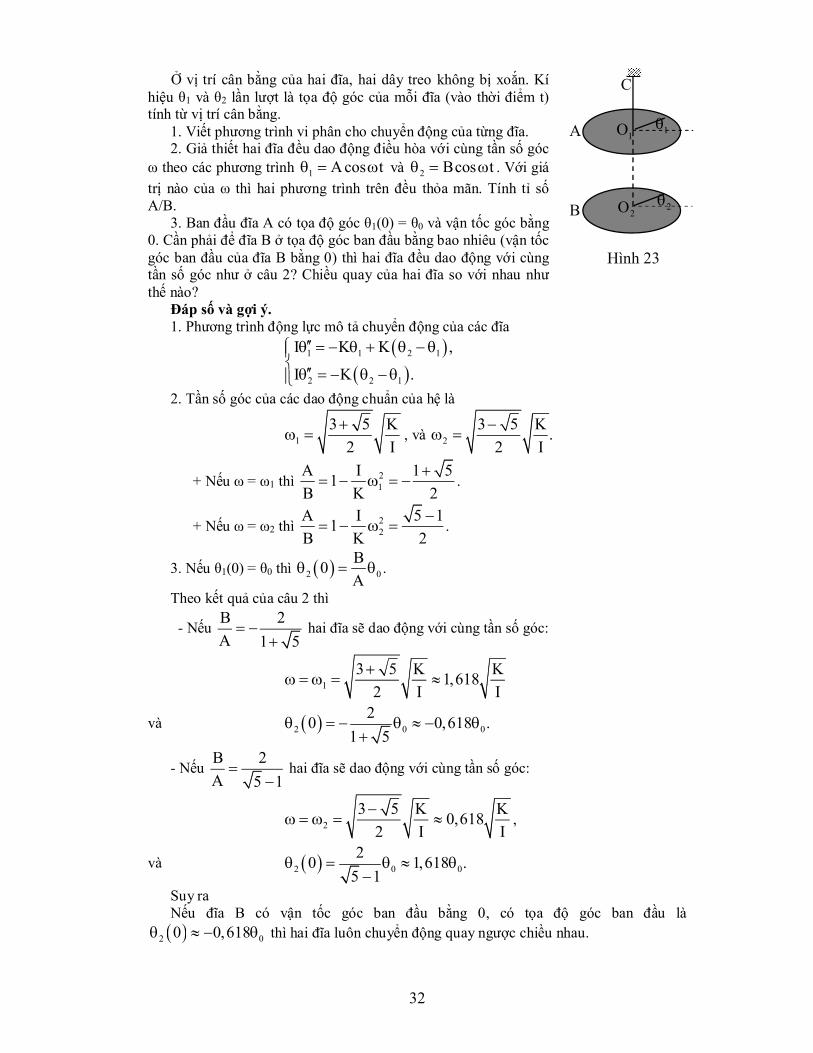
Đáp số và gợi ý. 1. Mạch điện như hình 22. Hai tần số chuẩn của mạch là
1
1 2
1
L(C 2C )
,
và
2
1
1
LC .
2. Ta có thể đặt hiệu điện thế xoay chiều vào hai điểm A và B trên hình 22, tính được trở kháng của mạch đối với tín hiệu xoay chiều trong trường hợp này là
1 2
2 1 1
1(C C )
L1 1
2C C CL L
.
Ta thấy trở kháng trên có giá trị lớn nhất ở các tần số cộng hưởng 1 và 2. Nó triệt tiêu ở tần số
A = 1 2
1
L C C .
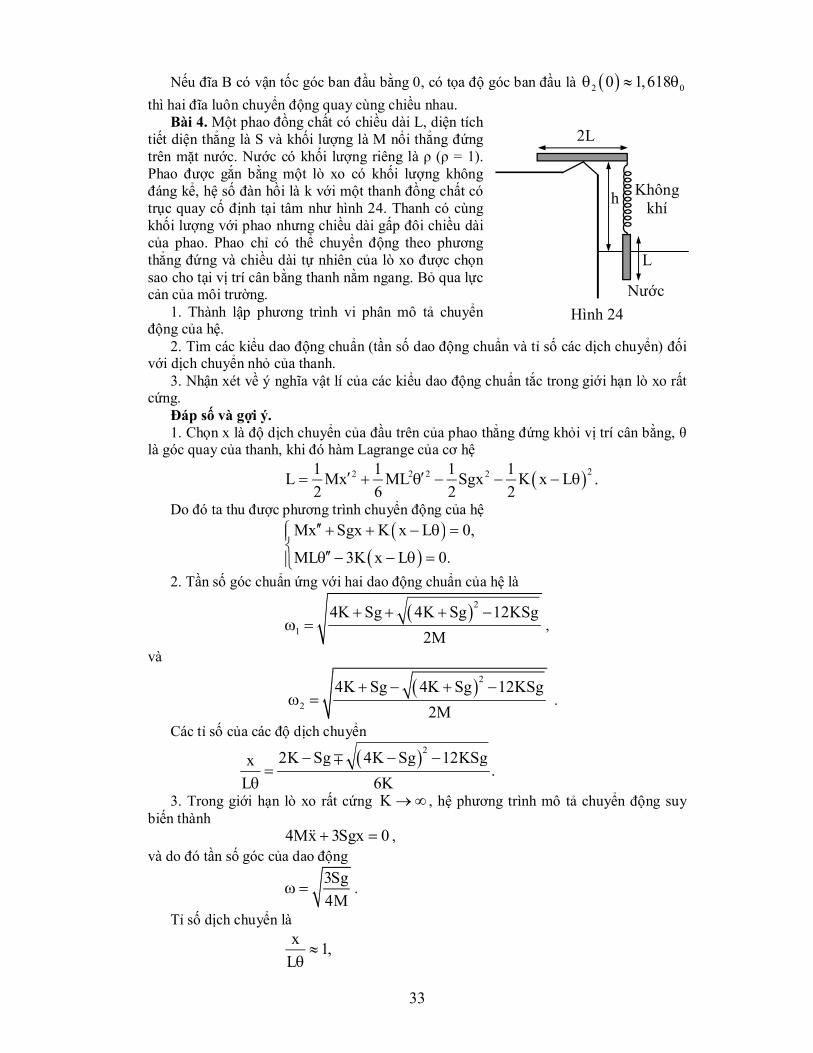
Bài 3. Hai đĩa tròn A và B đồng tính và giống hệt nhau. Mỗi đĩa có mômen quán tính I đối với trục quay đi qua tâm của đĩa và vuông góc với mặt phẳng của đĩa. Đĩa A nằm ngang, tâm của đĩa gắn vào đầu dưới của một sợi dây mảnh thẳng đứng có hằng số xoắn là K, đầu trên của dây gắn vào một điểm cố định C. Đĩa B cũng nằm ngang và tâm đĩa gắn vào đầu dưới của một sợi dây mảnh khác cũng có hằng số xoắn bằng K, giống như đĩa A, chỉ khác là đầu trên của sợi dây này gắn vào tâm mặt dưới đĩa A, khiến cho hai dây treo nằm trên cùng một đường thẳng đứng (Hình 23).
Hình 21
L2
B
A
q1 C1
i1
L1
i2
i5 i4
C2 C1 q2 q3
Hình 22
32
Ở vị trí cân bằng của hai đĩa, hai dây treo không bị xoắn. Kí hiệu θ1 và θ2 lần lượt là tọa độ góc của mỗi đĩa (vào thời điểm t) tính từ vị trí cân bằng.
1. Viết phương trình vi phân cho chuyển động của từng đĩa. 2. Giả thiết hai đĩa đều dao động điều hòa với cùng tần số góc
ω theo các phương trình 1 A cos t và 2 Bcos t . Với giá
trị nào của ω thì hai phương trình trên đều thỏa mãn. Tính tỉ số A/B.
3. Ban đầu đĩa A có tọa độ góc θ1(0) = θ0 và vận tốc góc bằng 0. Cần phải để đĩa B ở tọa độ góc ban đầu bằng bao nhiêu (vận tốc góc ban đầu của đĩa B bằng 0) thì hai đĩa đều dao động với cùng tần số góc như ở câu 2? Chiều quay của hai đĩa so với nhau như thế nào?
Đáp số và gợi ý. 1. Phương trình động lực mô tả chuyển động của các đĩa
1 1 2 1
2 2 1
I K K ,
I K .
2. Tần số góc của các dao động chuẩn của hệ là
1
3 5 K
2 I
, và 2
3 5 K.
2 I
+ Nếu ω = ω1 thì 21
A I 1 51
B K 2
.
+ Nếu ω = ω2 thì 22
A I 5 11
B K 2
.
3. Nếu θ1(0) = θ0 thì 2 0
B0
A .
Theo kết quả của câu 2 thì
- Nếu B 2
A 1 5
hai đĩa sẽ dao động với cùng tần số góc:
1
3 5 K K1,618
2 I I
và 2 0 0
20 0,618 .
1 5
- Nếu B 2
A 5 1
hai đĩa sẽ dao động với cùng tần số góc:
2
3 5 K K0,618
2 I I
,
và 2 0 0
20 1,618 .
5 1
Suy ra Nếu đĩa B có vận tốc góc ban đầu bằng 0, có tọa độ góc ban đầu là
2 00 0,618 thì hai đĩa luôn chuyển động quay ngược chiều nhau.
A
B
C
1O
2O
1
2
Hình 23
33
Nếu đĩa B có vận tốc góc ban đầu bằng 0, có tọa độ góc ban đầu là 2 00 1,618
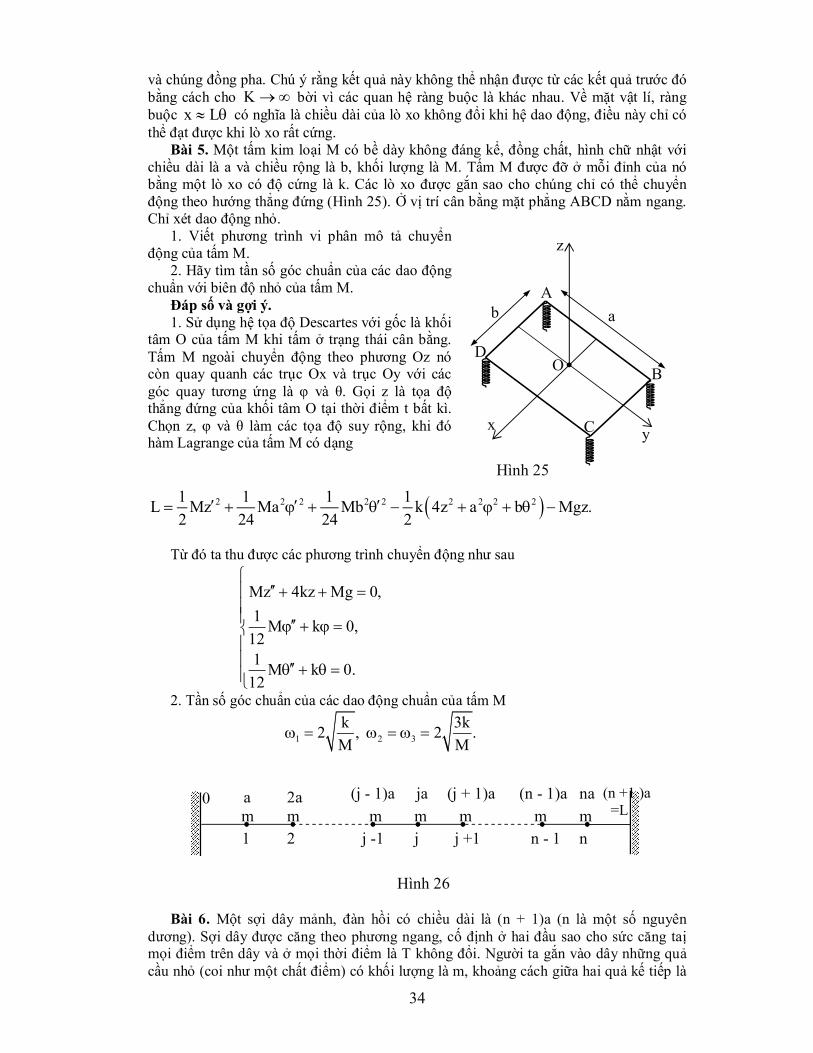
thì hai đĩa luôn chuyển động quay cùng chiều nhau. Bài 4. Một phao đồng chất có chiều dài L, diện tích
tiết diện thẳng là S và khối lượng là M nổi thẳng đứng trên mặt nước. Nước có khối lượng riêng là ρ (ρ = 1). Phao được gắn bằng một lò xo có khối lượng không đáng kể, hệ số đàn hồi là k với một thanh đồng chất có trục quay cố định tại tâm như hình 24. Thanh có cùng khối lượng với phao nhưng chiều dài gấp đôi chiều dài của phao. Phao chỉ có thể chuyển động theo phương thẳng đứng và chiều dài tự nhiên của lò xo được chọn sao cho tại vị trí cân bằng thanh nằm ngang. Bỏ qua lực cản của môi trường.
1. Thành lập phương trình vi phân mô tả chuyển động của hệ.
2. Tìm các kiểu dao động chuẩn (tần số dao động chuẩn và tỉ số các dịch chuyển) đối với dịch chuyển nhỏ của thanh.
3. Nhận xét về ý nghĩa vật lí của các kiểu dao động chuẩn tắc trong giới hạn lò xo rất cứng.
Đáp số và gợi ý. 1. Chọn x là độ dịch chuyển của đầu trên của phao thẳng đứng khỏi vị trí cân bằng, θ
là góc quay của thanh, khi đó hàm Lagrange của cơ hệ
22 2 2 21 1 1 1
L Mx ML Sgx K x L .2 6 2 2
Do đó ta thu được phương trình chuyển động của hệ
Mx Sgx K x L 0,
ML 3K x L 0.
2. Tần số góc chuẩn ứng với hai dao động chuẩn của hệ là
2
1
4K Sg 4K Sg 12KSg
2M
,
và
2
2
4K Sg 4K Sg 12KSg
2M
.
Các tỉ số của các độ dịch chuyển
22K Sg 4K Sg 12KSgx
.L 6K
3. Trong giới hạn lò xo rất cứng K , hệ phương trình mô tả chuyển động suy biến thành 4Mx 3Sgx 0 ,
và do đó tần số góc của dao động
3Sg
4M .
Tỉ số dịch chuyển là
x
1,L
Hình 24
L
2L
h
Nước
Không khí
34
m m m m m m m 0 a 2a (j - 1)a ja (j + 1)a (n - 1)a na (n +1 )a
=L
1 2 j -1 j j +1 n - 1 n
Hình 26
và chúng đồng pha. Chú ý rằng kết quả này không thể nhận được từ các kết quả trước đó bằng cách cho K bời vì các quan hệ ràng buộc là khác nhau. Về mặt vật lí, ràng buộc x L có nghĩa là chiều dài của lò xo không đổi khi hệ dao động, điều này chỉ có thể đạt được khi lò xo rất cứng.
Bài 5. Một tấm kim loại M có bề dày không đáng kể, đồng chất, hình chữ nhật với chiều dài là a và chiều rộng là b, khối lượng là M. Tấm M được đỡ ở mỗi đỉnh của nó bằng một lò xo có độ cứng là k. Các lò xo được gắn sao cho chúng chỉ có thể chuyển động theo hướng thẳng đứng (Hình 25). Ở vị trí cân bằng mặt phẳng ABCD nằm ngang. Chỉ xét dao động nhỏ.
1. Viết phương trình vi phân mô tả chuyển động của tấm M.
2. Hãy tìm tần số góc chuẩn của các dao động chuẩn với biên độ nhỏ của tấm M.
Đáp số và gợi ý. 1. Sử dụng hệ tọa độ Descartes với gốc là khối
tâm O của tấm M khi tấm ở trạng thái cân bằng. Tấm M ngoài chuyển động theo phương Oz nó còn quay quanh các trục Ox và trục Oy với các góc quay tương ứng là φ và θ. Gọi z là tọa độ thẳng đứng của khối tâm O tại thời điểm t bất kì. Chọn z, φ và θ làm các tọa độ suy rộng, khi đó hàm Lagrange của tấm M có dạng
2 2 2 2 2 2 2 2 21 1 1 1L Mz Ma Mb k 4z a b Mgz.
2 24 24 2
Từ đó ta thu được các phương trình chuyển động như sau
Mz 4kz Mg 0,
1M k 0,
12
1M k 0.
12
2. Tần số góc chuẩn của các dao động chuẩn của tấm M
1 2 3
k 3k2 , 2 .
M M
Bài 6. Một sợi dây mảnh, đàn hồi có chiều dài là (n + 1)a (n là một số nguyên
dương). Sợi dây được căng theo phương ngang, cố định ở hai đầu sao cho sức căng taị mọi điểm trên dây và ở mọi thời điểm là T không đổi. Người ta gắn vào dây những quả cầu nhỏ (coi như một chất điểm) có khối lượng là m, khoảng cách giữa hai quả kế tiếp là
Hình 25
D
A
B
C
b a
x
z
y
O
35
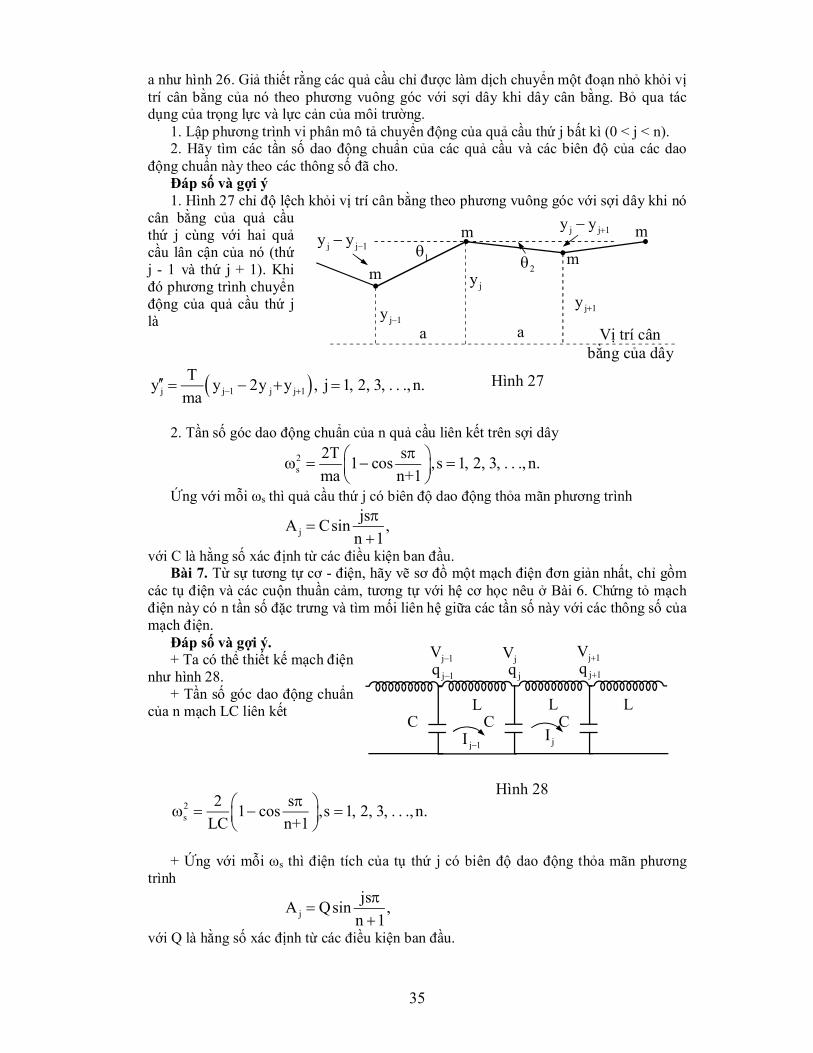
a như hình 26. Giả thiết rằng các quả cầu chỉ được làm dịch chuyển một đoạn nhỏ khỏi vị trí cân bằng của nó theo phương vuông góc với sợi dây khi dây cân bằng. Bỏ qua tác dụng của trọng lực và lực cản của môi trường.
1. Lập phương trình vi phân mô tả chuyển động của quả cầu thứ j bất kì (0 < j < n). 2. Hãy tìm các tần số dao động chuẩn của các quả cầu và các biên độ của các dao
động chuẩn này theo các thông số đã cho. Đáp số và gợi ý 1. Hình 27 chỉ độ lệch khỏi vị trí cân bằng theo phương vuông góc với sợi dây khi nó
cân bằng của quả cầu thứ j cùng với hai quả cầu lân cận của nó (thứ j - 1 và thứ j + 1). Khi đó phương trình chuyển động của quả cầu thứ j là
j j 1 j j 1
Ty y 2y y , j 1, 2, 3, . . ., n.
ma
2. Tần số góc dao động chuẩn của n quả cầu liên kết trên sợi dây
2s
2T s1 cos ,s 1, 2, 3, . . ., n.
ma n+1
Ứng với mỗi ωs thì quả cầu thứ j có biên độ dao động thỏa mãn phương trình
j
jsA Csin ,
n 1
với C là hằng số xác định từ các điều kiện ban đầu. Bài 7. Từ sự tương tự cơ - điện, hãy vẽ sơ đồ một mạch điện đơn giản nhất, chỉ gồm
các tụ điện và các cuộn thuần cảm, tương tự với hệ cơ học nêu ở Bài 6. Chứng tỏ mạch điện này có n tần số đặc trưng và tìm mối liên hệ giữa các tần số này với các thông số của mạch điện.
Đáp số và gợi ý. + Ta có thể thiết kế mạch điện
như hình 28. + Tần số góc dao động chuẩn
của n mạch LC liên kết
2s
2 s1 cos ,s 1, 2, 3, . . .,n.
LC n+1
+ Ứng với mỗi ωs thì điện tích của tụ thứ j có biên độ dao động thỏa mãn phương
trình
j
jsA Qsin ,
n 1
với Q là hằng số xác định từ các điều kiện ban đầu.
m
m
m
m
j 1y
jy
j 1y
j j 1y y j j 1y y
a a
1 2
Vị trí cân bằng của dây
Hình 27
j 1q
Hình 28
C L
C L
C L
j 1V jV j 1V
jq j 1q
j 1I jI
36
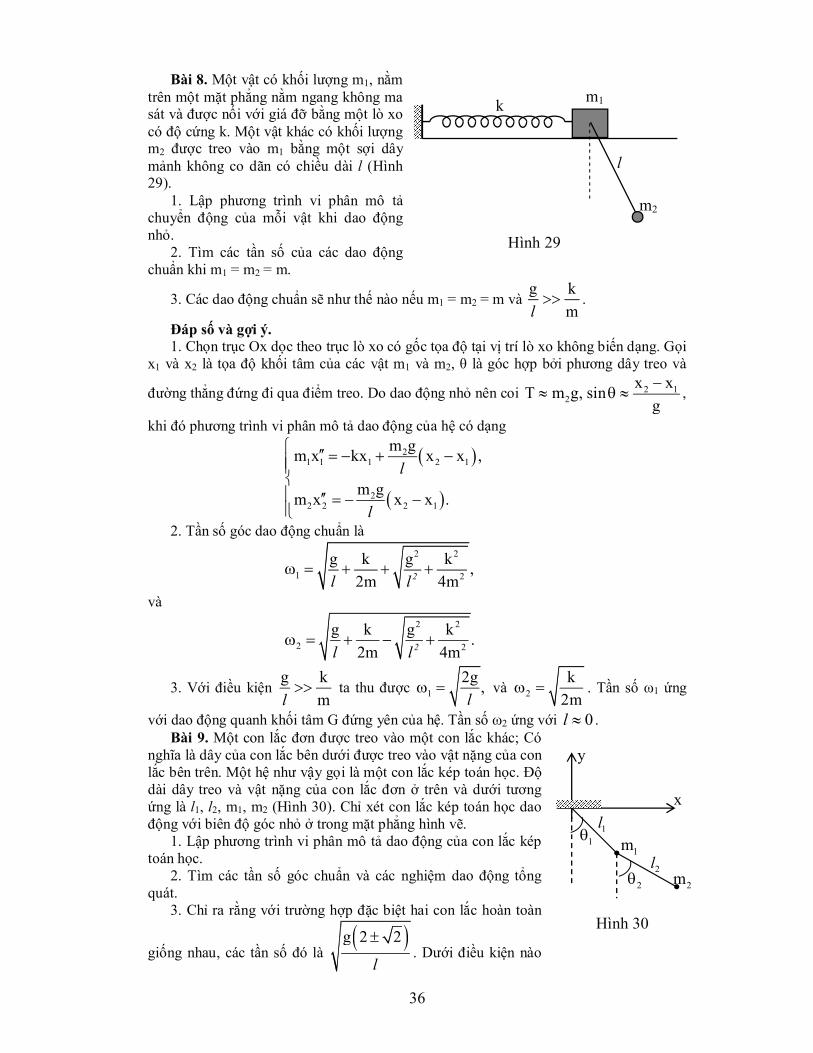
Bài 8. Một vật có khối lượng m1, nằm trên một mặt phẳng nằm ngang không ma sát và được nối với giá đỡ bằng một lò xo có độ cứng k. Một vật khác có khối lượng m2 được treo vào m1 bằng một sợi dây mảnh không co dãn có chiều dài l (Hình 29).
1. Lập phương trình vi phân mô tả chuyển động của mỗi vật khi dao động nhỏ.
2. Tìm các tần số của các dao động chuẩn khi m1 = m2 = m.
3. Các dao động chuẩn sẽ như thế nào nếu m1 = m2 = m và g k
m
l.
Đáp số và gợi ý. 1. Chọn trục Ox dọc theo trục lò xo có gốc tọa độ tại vị trí lò xo không biến dạng. Gọi
x1 và x2 là tọa độ khối tâm của các vật m1 và m2, θ là góc hợp bởi phương dây treo và
đường thẳng đứng đi qua điểm treo. Do dao động nhỏ nên coi 2 12
x xT m g, sin
g
,
khi đó phương trình vi phân mô tả dao động của hệ có dạng
21 1 1 2 1
22 2 2 1
m gm x kx x x ,
m gm x x x .
l
l
2. Tần số góc dao động chuẩn là
2 2
1 2
g k g k,
2m 4m
2l l
và
2 2
2 2
g k g k.
2m 4m
2l l
3. Với điều kiện g k
m
l ta thu được 1
2g,
l và 2
k
2m . Tần số ω1 ứng
với dao động quanh khối tâm G đứng yên của hệ. Tần số ω2 ứng với 0l . Bài 9. Một con lắc đơn được treo vào một con lắc khác; Có
nghĩa là dây của con lắc bên dưới được treo vào vật nặng của con lắc bên trên. Một hệ như vậy gọi là một con lắc kép toán học. Độ dài dây treo và vật nặng của con lắc đơn ở trên và dưới tương ứng là l1, l2, m1, m2 (Hình 30). Chỉ xét con lắc kép toán học dao động với biên độ góc nhỏ ở trong mặt phẳng hình vẽ.
1. Lập phương trình vi phân mô tả dao động của con lắc kép toán học.
2. Tìm các tần số góc chuẩn và các nghiệm dao động tổng quát.
3. Chỉ ra rằng với trường hợp đặc biệt hai con lắc hoàn toàn
giống nhau, các tần số đó là g 2 2
l. Dưới điều kiện nào
k m1
m2
l
Hình 29
x
1m
2m
1l
2l
1
2
Hình 30
y

37
của hệ để hệ chuyển động như một vật duy nhất. Đáp số và gợi ý. 1. Chọn θ1 và θ2 làm tọa độ suy rộng của cơ hệ. Trong gần đúng dao động nhỏ của
con lắc kép ta có hàm Lagrange của hệ như sau
2 2 2 2 2 21 2 1 1 2 2 2 2 1 2 1 2 1 2 1 1 2 2 2
1 1 1 1L m m m m m m m .
2 2 2 2 l l l l gl gl
Khi đó ta thu được phương trình vi phân mô tả dao động của con lắc kép
1 2 1 1 2 2 2 1 2 1
1 1 2 2 2
m m m m m g 0,
g 0.
l l
l l
2. Tần số góc dao động chuẩn là
1
22 2
1 1 2 1 2 1 2 2 1 2 1 1 2
1 2 1
gm m m m m m ,
2 m
l +l l +l l - l
l l
và
1
22 2
2 1 2 1 2 1 2 2 1 2 1 1 2
1 2 1
gm m m m m m .
2 m
l +l l +l l - l
l l
Nghiệm tổng quát là
2 2
2 1 2 1 1 21 21 1 1
1 1 1 2
2 2
2 1 2 1 1 21 22 2
1 1 1 2
m m1Acos t
2 2 m m
m m1Bcos t ,
2 2 m m
l +l l - ll - l
l l
l +l l - ll - l
l l
và
2 1 1 2 2A cos t Bcos t .
3. Để hệ chuyển động như một vật rắn duy nhất cần có điều kiện θ1 = θ2, từ đó suy ra
1 2 1 1 2m m m 0. l l
Phương trình trên cần có l1 = 0 hoặc l2 = 0, hoặc m1 = 0. Mỗi trường hợp này sẽ làm cho hệ hai con lắc rút về trở thành một con lắc đơn duy nhất. Do đó hệ hai con lắc đơn này không thể chuyển động như một vật rắn duy nhất.
Bài 10. Một hạt có khối lượng m, chuyển động trong một trường lực thế mà thế năng
của nó có biểu thức: 2 2 2 20
1U m x y z
2 , với m là khối lượng của hạt, ω0 là tần
số góc dao động riêng của hạt. Nếu hạt này được tính điện với điện tích là e và chịu tác dụng đồng thời của điện trường đều có cường độ E hướng theo trục x và từ trường đều có cảm ứng từ B hướng theo trục z.
1. Thành lập phương trình vi phân mô tả chuyển động của hạt. 2. Hãy tìm tần số góc dao động chuẩn. 3. Hãy thảo luận các kết quả thu được trong câu 2 trong giới hạn trường yếu và
trường mạnh. Đáp số và gợi ý. 1. Hàm Lagrange của hạt mang điện e trong điện trường và từ trường ngoài có dạng
2 2 2 2 2 2 20
1 1 1L m x y z m x y z eEx + eB xy x y .
2 2 2
Khi đó ta thu được các phương trình vi phân sau

38
2
0
20
20
eB eEx x y 0,
m m
eBy y x 0,
m
z z 0.
2. Tần số góc chuẩn là 1 0 ,
2
22 0
1 eB eB4 ,
2 m m
và
2
23 0
1 eB eB4 .
2 m m
Trong các tần số dao động chuẩn ở trên thì hai kiểu dao động cuối được gây nên bởi
chỉ một mình từ trường, trong khi điện trường chỉ gây nên dịch chuyển 20
eE
m dọc theo
hướng của nó.
3. Đối với trường yếu, 0
eB
m , ta có
2 0
eB,
2m và 2 0
eB.
2m
Đối với trường mạnh, 0
eB
m , ta có
2 2 2
0 02 2 2
2m m1 eB eB eB1 ,
2 m m e B m eB
và
2 2 2
0 03 2 2
2m m1 eB eB1 .
2 m m e B eB
TÀI LIỆU THAM KHẢO
1. Phạm Quý Tư, Một số vấn đề về dao động, Nhà xuất Giáo dục, 2008. 2. Nguyễn Hữu Mình, Cơ học lí thuyết, Nhà xuất bản ĐHQGHN, 1997. 3. Tô Giang, Bồi dưỡng học sinh giỏi vật lí trung học phổ thông - Cơ học 2, Nhà xuất bản Giáo dục Việt Nam, 2009. 4. Vũ Thanh Khiết - Vũ Đình Túy, Các đề thi học sinh giỏi Vật lí (2001 - 2010), Nhà xuất bản Giáo dục Việt Nam, 2011. 5. Yung-Kuo Lim, Bài tập và lời giải cơ học (bản dịch tiếng Việt), Nhà xuất bản Giáo dục, 2009. 6. H. J. Pain, The Physics of Vibrations and Waves, John Wiley & Sons, 1993.





























