Embed Size (px)
Citation preview

System & Vision Lab.1svl.kumoh.ac.kr
DC 서보모터의 토크
System & Vision Lab.2svl.kumoh.ac.kr
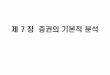
서보모터의 종류별 특징과 주요용도 (삼성Rockwell)

System & Vision Lab.3svl.kumoh.ac.kr
증가형 엔코더
(a) A simple rotary incremental encoder wheel. (b) A linear incremental encoder.

System & Vision Lab.4svl.kumoh.ac.kr
증가형 엔코더의 신호(A, B, Z)
A상, B상 신호를 이용한 4체배
A상, B상 신호의 발생

System & Vision Lab.5svl.kumoh.ac.kr
증가형 엔코더
원리 발광소자에서나온빛이디스크의회전슬릿과고정슬릿을통과한다. 통과한빛에너지는수광소자를통해전류로변환되어파형정형회로와출력회로를거쳐위상이 1/4주기다른2개의구형파펄스로출력된다.
특성 회전축의회전변위량에따라구형파로출력하는방식이다.
외부카운터에서출력펄스수를계산하고, 카운터수에따라회전변위량을검출한다.
임의의회전축의회전변위량을알기위해서는기준위치(원점)를설정하여야하며, 기준위치로부터펄수수를카운터로누적가산한다.
엔코더의출력회로에별도의회로를추가하여출력펄수를 2체배, 4체배하여전기적인분해능을높일수있다.
전원정전후, 전원복귀시에는기준위치를새로찾아야한다.

System & Vision Lab.6svl.kumoh.ac.kr
절대형 엔코더
절대위치 엔코더의 각 위치를 표현하는 각각의 부분은 독특한특징을 가지고 있으며 이를 통해서 엔코더의 위치를 알 수 있게된다.
그림에서 보는 것과 같이 호에 3 개의 열을 가지는 엔코더는 23 = 8 가지의 다른 조합을 가지고 있고, 각 구획은 45° 의 각을 표현할수 있다.
Binary code: 000, 001, 010, 011, 100, 101. 110, 111 Gray code: 000, 001, 011, 010, 110, 111, 101, 100
System & Vision Lab.7svl.kumoh.ac.kr
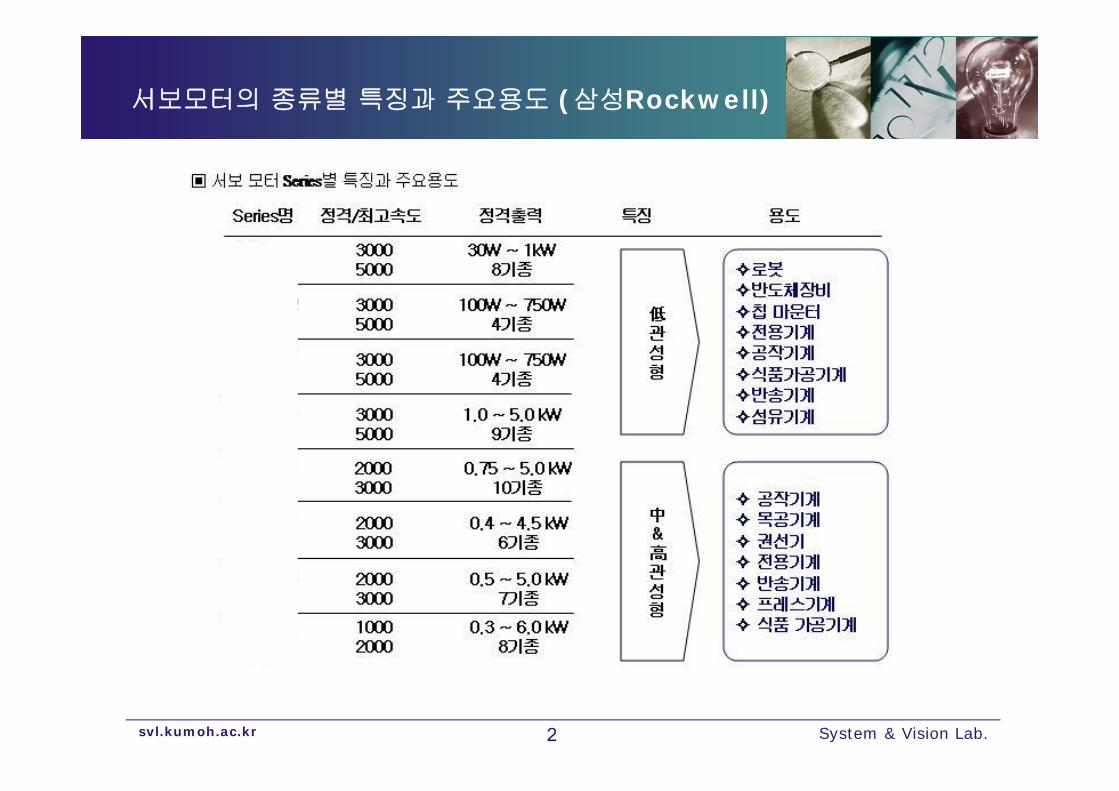
AC 서보모터의 작동원리
시간의 흐름에 따라 자장 가 CW로 회전함: 회전자장

System & Vision Lab.8svl.kumoh.ac.kr
서보모터에 대한 실습
서보모터에서 나오는 4개의 전원선 U, V, W, Earth 선들을확인하고, 모터의 엔코더에서 나오는 9개의 신호선들을 확인
Homework “서보모터드라이브카탈로그.pdf”에서 HC-MFS 13(B) 에대한자료정리할것
Yaskawa의 Σ시리즈, Panasonic의 Minas 시리즈에서상기의모터와유사한사양의모터에대하여조사해올것
System & Vision Lab.
9
Chap. 3 서보드라이브
신동원
금오공과대학교 기계공학부
System & Vision Lab (SVL)

System & Vision Lab.10svl.kumoh.ac.kr
서보드라이브란?
모션제어기로부터 위치명령을 입력받아
서보모터가 정해진 위치만큼 움직이도록 코일에원하는전류를흘려주는장치
단순히 전류만 흘려주는 장치가 아니라
다양한입출력기능과회로보호기능이있는전기전자장비

System & Vision Lab.11svl.kumoh.ac.kr
Servo 계 구성도
서보계의 구성 서보모터
서보드라이브
모션제어기
PC or PLC Servo Drive, Servo Driver,
Servo Amp, Servo Pack 등은 모두 같은 의미
PC

System & Vision Lab.12svl.kumoh.ac.kr
서보드라이브의 종류(제어모드)
제어모드에 따라 다음과 같이 3종류로 구분된다.
1. 위치형 상위제어기로부터위치지령신호를디지털펄스로입력받고서보드라이브는펄스의개수에해당하는위치제어를행한다.
가장많이사용함
2. 속도형 상위제어기로부터속도지령신호를아날로그전압으로입력받고서보드라이브는전압값에해당하는속도제어를행한다.
3. 토크형 상위제어기로부터토크지령신호를아날로그전압으로입력받고서보드라이브는전압값에해당하는토크제어를행한다. 토크는전류에정비례하므로흔히토크제어를전류제어라고도부른다.
위치형, 속도형, 토크형이 일체형으로 나와 사용자는 서보드라이브의파라미터를 세팅함으로써 위치형, 속도형, 토크형을 선택할 수 있다

System & Vision Lab.13svl.kumoh.ac.kr
서보드라이브의 종류(입력신호)
모션제어기로부터 받는 입력신호의 형태에 따라 2종류로 나뉜다.
1. 펄스형 위치형
2. 전압형 속도형, 토크형
모션제어기와 서보드라이브로 보내는 지령신호에 따른 분류인관계로, 모션제어기가 펄스형이면 당연히 서보드라이브도 펄스형이되야할 것이고, 모션제어기가 전압형이면 서보드라이브도 전압형이되어야 한다.

System & Vision Lab.14svl.kumoh.ac.kr
서보드라이브의 사양
서보드라이브의 개요 서보모터 : HC-MFS 13(B), 서보드라이브 : MR-J2S-10A 위치형으로설정
서보드라이브의 사양 Maximum input pulse frequency
• Differential Receiver(라인드라이버)로펄스를입력받음• 500kpps(500,000 pulse per second)로일초당 500,000개의펄스를받음• 전자기어비에서일회전당모션제어기의출력펄수의수를 10,000 pulse로세팅하였다면
500,000=10,000*50 으로일초에 50회전이최대회전수가된다.
Position Feedback Pulse:• 받아들이는엔코더의펄스수로 131,072 pulse/rev
Command Pulse Multiple• 전자기어비를의미한다. • 현시스템에서는 131,072pulse/10,000pulse 이므로 A/B=13.102