Embed Size (px)
Citation preview
Déformation électroélastique d’un corps
solide anisotrope par la méthode des
éléments finis
République Algérienne Démocratique et Populaire
Ministère de L'enseignement Supérieur et de La Recherche Scientifique
Université de Tébessa
Faculté des Sciences et technique
Département de génie mécanique
Mémoire
de fin d’étude pour l’obtention
Du diplôme de Master
CFAO
Thème
Présenté par : Proposé par :
-Djeffal Nouzha H. Belghalem
-Selatnia Neserin
Promotion 2015-2016

تقدير شكر و
لحمد رب العالمين والصالة والسالم على خاتم االنبياء و ا فإننا :اما بعد ˓اجمعينمرسلين نبينا محمد وعلى اله و صحبه
إلنھاء اعلى ما من به علينا ووفقن شكر هللا سبحانه و تعالىنستر.جميع متطلبات درجة الما
و ما اودعمان ناو تحمال ھم اشكر الى من علمانالفيض بنو اطال هللا بقائھما و جزاھما حسن الثواب. ˓نافتئا يدعوان ل
متنان و جزيل الشكر لسعادة الدكتور بلغالم االدم عظيم نقو لدعمه و صبره و توجيھه لنا ˓ المشرف على الرسالة الحاج
و لم يبخل علينا بذلك بخالصة علمه الذي شھد له هللا تعالى آيات قدمننوي طوال فترة البحث كما بدعمه العلمي والمعلجنة المناقشة االستاذ حجاب حكيم ألعضاءالعرفان و التقدير
.و االستاذ عباسي محمد
الحمد رب العالمين والصالة ا اوال ناقول بما قلالختم نوالسالم على خاتم االنبياء و المرسلين نبينا محمد وعلى اله و
.اجمعين صحبه
Tabledesmatières
Tabledesmatières
Index des figure
Nomenclature
Introduction……………………………………………………………………………………………….
Chapitre 1 : Généralités
1.1.Introduction……………………………………………………………………………………………………..
1.2 La piézoélectricité…………………………………………………………………………………………….
1.2.1 Effet direct de la piézo‐électricité……………………………………………………………….
1.2.2 Effet inverse de la piézoélectricité………………………………………………………………
1.2.3 L’effet piézoélectrique………………………………………………………………………………..
a) Aspect chimique………………………………………………………………………………………..
b) Aspect physique………………………………………………………………………………………..
1.3 Types de matériaux piézoélectrique………………………………………………………………...
a) Avec plomb……………………………………………………………………………………………….
b) Sans plomb………………………………………………………………………………………………..
1.3.1 Classification de différents matériaux…………………………………………………………..
1.4 Applications du phénomène de la piézoélectricité…………………………………………
1.4.1.L’effet direct……………………………………………………………………………………………..
1.4.1.1 Capteurs………………………………………………………………………………………………
1.4.1.1.1 Accéléromètres…………………………………………………………………………………..
1.4.1.1.2 Capteurs de vibration……………………………………………………………………….
1.4.1.1.3 Capteurs de vibrations sonores……………………………………………………..
1.4.1.1.4 Capteurs d’impact……………………………………………………………………………..
1
3
3
3
5
6
6
7
8
9
10
10
11
11
11
11
12
12
12
Tabledesmatières
1.4.1.2 Production d’énergie………………………………………………………………………….
1.4.1.2.1Le briquet piézoélectrique…………………………………………………………………
1.4.1.2.2 Implants expérimentaux utilisant la piézoélectricité…………………………….
1.4.1.2.3Produire de l’énergie en marchant……………………………………………………….
1.4.1.2.4Parking piézoélectrique………………………………………………………………………..
1.4.1.2.5 Métro piézoélectrique à Tokyo…………………………………………………………….
1.4.1.2.6Une autoroute électriquement autonome……………………………………………
1.4.2L’effet inverse………………………………………………………………………………………………
1.4.2.1 Les générateurs de vibrations…………………………………………………………………
1.4.2.2 Générateurs de son audible……………………………………………………………………
1.4.2.3 Horloges………………………………………………………………………………………………….
1.5 Les équations de Maxwell………………………………………………………………………………..
1.6Rappel sur les tenseurs…………………………………………………………………………………….
1.6.1Nombre de module élasticité indépendante………………………………………………
1.6.2Nombre de constantes piézoélectriques indépendantes…………………………….
1.6.3Nombre de constants diélectriques indépendants……………………………………..
1.7 Les 7 système cristallins………………………………………………………………………………….
Chapitre 2 : Modélisation d’un corps solide anisotrope
2.1 Déformation électroélastique…………………………………………………………………………..
2.2 Module de déformation électroélastique…………………………………………………………
2.3 Les conditions aux limites…………………………………………………………………………………
Chapitre 3 : Résolution du modèle par la méthode des éléments finis
3.1 La méthode des éléments finis………………………………………………………………………..
12
12
13
13
14
14
15
16
16
16
16
16
18
18
19
19
20
21
24
27
28
Tabledesmatières
3.1.1 Introduction……………………………………………………………………………………………..
3.1.2 Exemple 2D sur maillage triangulaire………………………………………………………..
3.1.2.1 Maillage triangulaire à 3 nœuds………………………………………………………………
3.1.3 Maillage…………………………………………………………………………………………………….
Exemple 2D sur maillage quadrangulaire à 4 nœuds……………………...
Exemple 3D Elément tétraédriques`a 4 nœuds………………………………
3.2 Description………………………………………………………………………………………………………
3.2.1 Elément et fonctions d'interpolation………………………………………………………….
3.2.1.1 Le choix des éléments de base………………………………………………………………..
a) les éléments les plus simples unidimensionnels (référence classiques)…..
b) les éléments bidimensionnels……………………………………………………………………
c) Les éléments tridimensionnels…………………………………………………………………
Type des nœuds……………………………………………………………………………………….
Degrés de libertés…………………………………………………………………………………….
3.2.1.2Fonction d'interpolation polynomiale………………………………………………………
a) Cas d'une seule variable indépendante (cas unidimensionnel) ………………….
b) Cas de deux variables indépendantes (cas bidimensionnel)………………………..
c) Cas de trois variables indépendantes (cas tridimensionnel)………………………..
3.2.1.3La formulation variationnelle du problème………………………………………………
3.2.1.4 La méthode des résidus pondérés………………………………………………………….
Théoréme de GREEN……………………………………………………………………………..
3.2.1.5Construction et assemblage des matrices élémentaires………………………….
Expansion …………………………………………...……………………...................
3.2.1.5.1 Expansion du vecteur élémentaire f ………………………………………………..
3.2.1.5.2 Introduction les conditions aux limites…………………………………………………
3.2.1.6 Résolution numérique…………………………………………………………………………..
28
30
30
31
31
32
32
32
32
32
33
34
34
34
34
35
35
35
36
37
38
40
40
41
41
42
Tabledesmatières
Chapitre 4 : Application à la méthode des éléments finis
4.1. Géométrie des éléments finis………………………………………………………………………….
4.2. Fonction d’interpolation………………………………………………………………………………….
4.3.La méthode de Galerkine……………………………………………………………………………….
4.3.1.Equation de l’éctroélastique …………………………………………………………………………
4.3.2 Application de la méthode de GALERKINE……………………………………………………..
4.3.3. Application du théorème de GREEN…………………………………………………………….
Conclusion Générale…………………………………………………………………………………
Bibliographie……………………………………………………………………………………………
ANNEXES
Annexe 1
Annexe 2
Résolution numérique
Annexe 3
Organigramme d'un logiciel éléments finis
Annexe 4
Organigramme de calcul de champ de température
43
44
48
48
51
52
89
90
Index des figures
INDEX DES FIGURES
Chapitre 1 : Généralités
Figure 1-1: (a) Illustration du comportement d’une pastille piézo-électrique, (b) et (c)
essais de mesure.........................................................................................................4
Figure 1-2: Maille élémentaire de Quartz……..……………………………..………5
Figure 1-3: Exemple de la structure du titanate du plomb ……….…………....……6
Figure 1-4: déformation d’un matériau piézoélectrique…………………..………..7
Figure 1-5: Quelques types de matériaux piézoélectriques…..………….…………8
Figure 1-6: Quelques outils piézoélectriques………..……………………….….9,10
Figure 1-7: Relations entre les classes de symétrie, les sous-groupes piézoélectriques,
pyroélectriques, ferroélectriques et les structures cristallines………..……….…...10
Figure 1-8: Effet direct…………………………………………………………..…13
Figure 1-9 : Un pacemaker à base de matériaux piézoélectrique………..….…….13
Figure 1-10 : Elément piézoélectrique…………………………………………….14
Figure1-11 : Métro piézoélectrique à Tokyo………………………………….….15
Figure1-12 : Route principale en Palestine qui va du Nord au Sud du pays…..…15
Index des figures
Chapitre 2 :Modélisation d’un corps solide anisotrope
Figure 2-1: La plaque avec les conditions aux limites…………………………..27
Chapitre 3: Résolution du modèle par une méthode numérique
Figure 3-1: Maillages……………………………………………………..………29
Figure 3-2: exemples de maillages triangulaires du carré………………..……...30
Figure 3-3: Un maillage triangulaire d’un disque………………………….…….31
Figure 3-4: Exemples de maillages quadrangulaires du carré…………….….….31
Figure 3-5: Exemples de maillages tétraédrique………………………….….…..32
Figure 3-6: Géométriques d'éléments à une dimension………………………….33
Figure 3-7 : Éléments à deux dimensions………………………………………..33
Figure 3-8 : Éléments volumiques à transformation linéaire…………………….34
Figure3-9 : Transformation d’un système du modèle…………………………...36
Figure3-10 :Domaine bidimensionnel…………………………………………...39
Nomenclature
Nomenclature
-1- Liste des symboles latins
C : Matrice de rigidité du matériau.
C : Paramètres inconnus.
: Vecteur déplacement .
: Champ électrique.
: Le vecteur de force ( N).
h : La largeur du cristal en (m).
k : Constante piézoélectrique.
K : La matrice élémentaire.
[L] : Matrice triangulaire inférieure.
m : Nombre de Paramètre inconnu.
N : Fonction d’interpolation connue.
P : La pression exercé sur le cristal en Pa.
S : Constante de sensibilité.
S : Entropie.
T : Température (°C)
U : Energie interne
U : Matrice triangulaire supérieure.
Nomenclature
U : Tension en V.
:Déplacement dans la direction i.
: Le vecteur élémentaire.
x : Cosinus directeur de la normal projection sur l’axe des x.
: Le vecteur élémentaire.
-2- Liste des symboles grecque
: Tenseur des modules d’élasticité.
: Tenseur des contraintes d’électriques.
: Composante du tenseur de contrainte.
: Composante du tenseur de déformation.
: Tenseur des contraintes piézoélectriques.
: Tenseur des contraintes d’électriques.
∶ .
∅ : Solution approchée.
∆ : Aire de l’élément triangulaire.
: Laplacien.
Introduction
1
INTRODUCTION
La piézoélectricité est une interaction électromécanique les matériaux
piézoélectriques sont des diélectriques qui se déforment sous l'effet d'un champ
électrique et qui produisent une polarisation sous l'effet de déformations. Ce dernier
phénomène est appelée "l’effet direct", pour une raison purement historique vu son
aspect réversible.
On traduit ce comportement par des lois liant le tenseur des contraintes et le vecteur
champ électrique d'une part, et le tenseur des déformations et le vecteur de
polarisation ou le vecteur déplacement électrique d'autre part.
Les matériaux piézoélectriques comme capteur (effet direct) et actionneurs
(effet inverse). Par exemple, une plaque, ou des pastilles piézoélectrique, adhérant à
un matériau élastique en détectent les déformations par l’effet direct, ils peuvent
servir pour déformer le matériau par l’effet inverse; d’où la possibilité de contrôler les
vibrations dans des structures élastiques, en particulier les plaques et les coques.
Les matériaux piézoélectriques sont aussi utilisés dans le contrôle de forme
(ailes d’avion, miroirs des télescopes), ainsi que dans la conception d’organes
artificiels biomécanique [1].
Le but de notre modeste travail est de déterminer le champ de déplacement et
le potentiel électrique crée par l’application d’une force mécanique. Notre travail
comporte quatre chapitres Une généralité sur le phénomène piézoélectrique, ainsi les
deux effets, direct et inverse existant et leur application fait l’objet du premier
chapitre. Dans le deuxième chapitre on modélise le phénomène piézoélectrique par la
détermination d’un système d’équations différentielles couplées. Pour résoudre ce
système une méthode numérique est nécessaire la méthode choisie est celle des

Introduction
2
éléments finis une description élargie de différentes étapes de cette méthode est faite
est qui fait l’objet du troisième chapitre. Le quatrième chapitre traite l’application de
la méthode cité et la détermination de la matrice de rigidité (K).

Chapitre 1 :
Généralités
La piézoélectricité et le phénomène d'interaction
Résoudre les équations de Maxwell
Rappel sur le tenseur
Résumé :
Ce chapitre est consacré à des généralités sur le phénomène piézoélectrique
(effet direct et effet inverse). Ainsi leurs différentes applications dans les
différents domaines
Chapitre 1 : Généralités
3
Chapitre 1 : Généralités
1.1Introduction
La piézoélectricité interdépendance des propriétés élastiques existant dans certains
matériaux, est intimement liée à l’étude des ondes élastiques. La plupart des
dispositifs convertissant l’énergie mécanique en énergie électrique ou
réciproquement, appelés transducteurs, fonctionnent par effet piézoélectrique direct
ou inverse. D’autre part, l’exploitation en électronique, dans le domaine du filtrage,
des propriétés mécaniques remarquables de certains cristaux, comme leur grand
coefficient de surtension, est possible grâce à leur piézoélectricité.
Des résonateurs électromécaniques, en quartz par exemple, sans directement
insérés dans des circuits leur vibration étant entretenue par le champ électrique.[2]
1.2 La piézoélectricité
La piézoélectricité veut dire (du grec « piézen » presser, appuyer) est la propriété
possédée par certains corps qui peuvent se déformer sous l’action d’un champ
électrique.
Ce phénomène a été découvert par les frères Pierre et Jacques Curie1).Il existent deux
effets, direct et inverse.
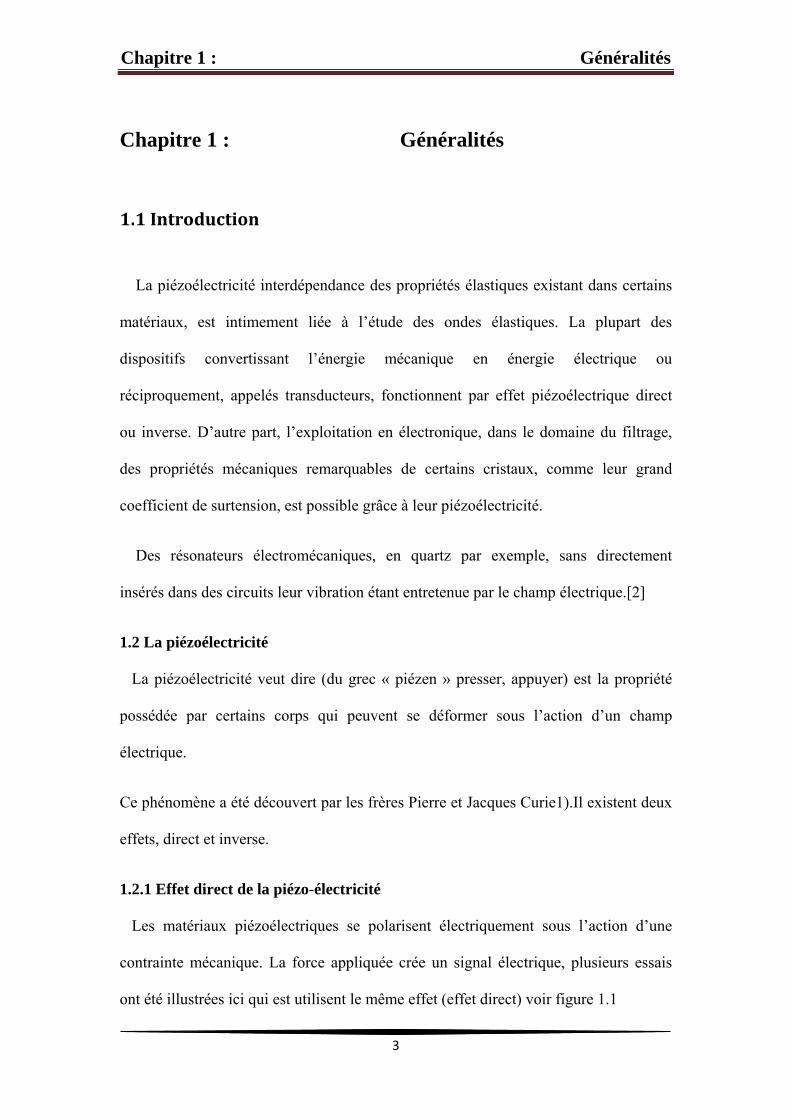
1.2.1 Effet direct de la piézo-électricité
Les matériaux piézoélectriques se polarisent électriquement sous l’action d’une
contrainte mécanique. La force appliquée crée un signal électrique, plusieurs essais
ont été illustrées ici qui est utilisent le même effet (effet direct) voir figure 1.1
Chapitre 1 : Généralités
4
Aussi, à l'aide de 2 pointes de touche reliées à un millivoltmètre, on exerce une
pression (donc des forces) de part et d'autre d'un cristal, on mesure alors une tension
(quelques mV) dont la valeur dépend de la force exercée figure 1.1b.
D’autres types d’essais, La pression exercée sur le quartz, le déforme et crée une
tension électrique allumant la diode électroluminescente figure 1.1c.[3]
Fig.1.1 :(a) Illustration du comportement d’une pastille piézo-électrique, (b) et (c)
essais de mesure.
(c)
(b)
(a )
Chapitre 1 : Généralités
5
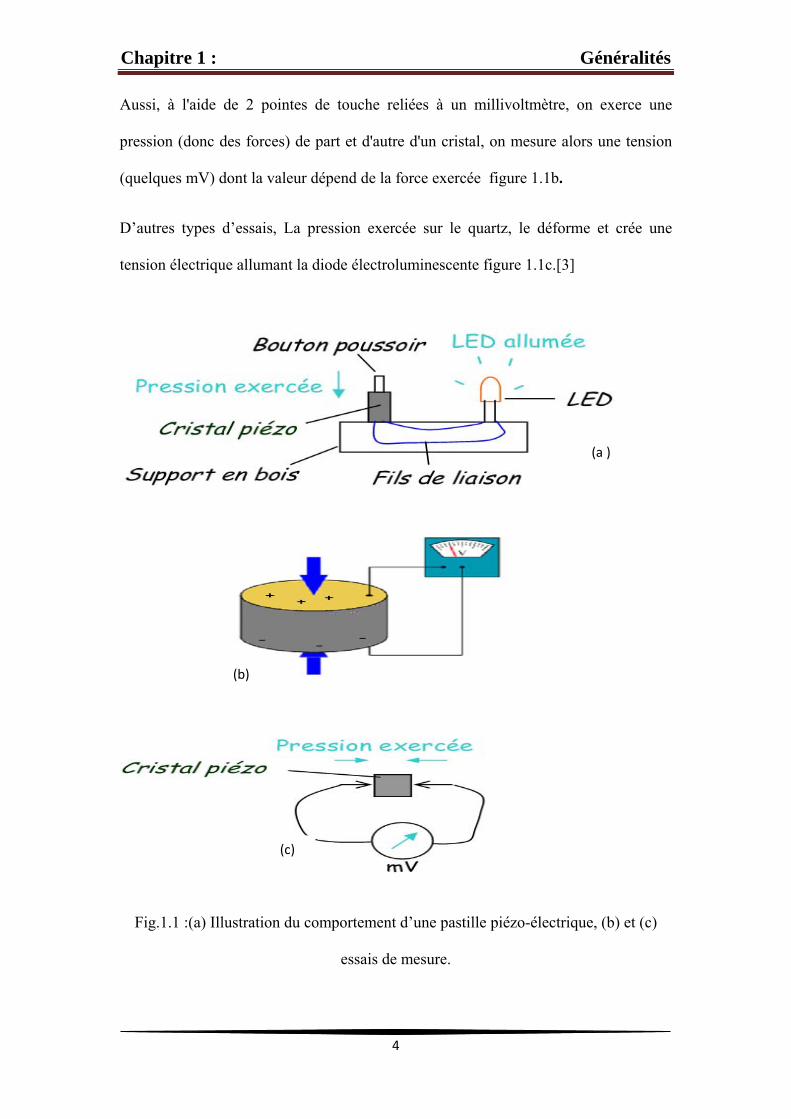
On peut définir la piézoélectricité comme suit voir figure 1.2. En l’absence de
contrainte, les barycentres des charges positifs et les charges négatives des
trois Si ) coïncidents, leur moment dipolaire est nul (figure 1.2a). Mais, si en exerce
deux forces de compression (contrainte) selon axe, les barycentres ( , ) ne
coincident pas, donc il apparait un moment dipolaire, c’est-à-dire des charge
superficielles, c’est l’effet piézoélectricité.
(a) Absence de contrainte (b) compression on selon l’axe mécanique
Fig.1.2 : Maille élémentaire de Quartz.
1.2.2 Effet inverse de la piézoélectricité
Inversement le cristal se déforme lorsqu’on lui applique une tension électrique c'est
l'effet inverse de la piézoélectricité. 3
Chapitre 1 : Généralités
6
1.2.3 L’effet piézoélectrique
a) Aspect chimique :
De nombreux cristaux composés de cations (ions de charge positive) et d’anions
(ions de charge négative) génèrent un courant électrique lorsqu’ils sont soumis à une
contrainte mécanique, telle qu’une pression.
Grâce à cette contrainte mécanique la structure ionique stable des cristaux est
déformée, modifiant la disposition des ions. Le nuage électronique se voit donc
déformé et deux parties se forment dans les cristaux; l’une avec majorité de charges
négatives, et l’autre avec plus de charges positives. Une différence de potentiel
électrique se forme, soit une tension.
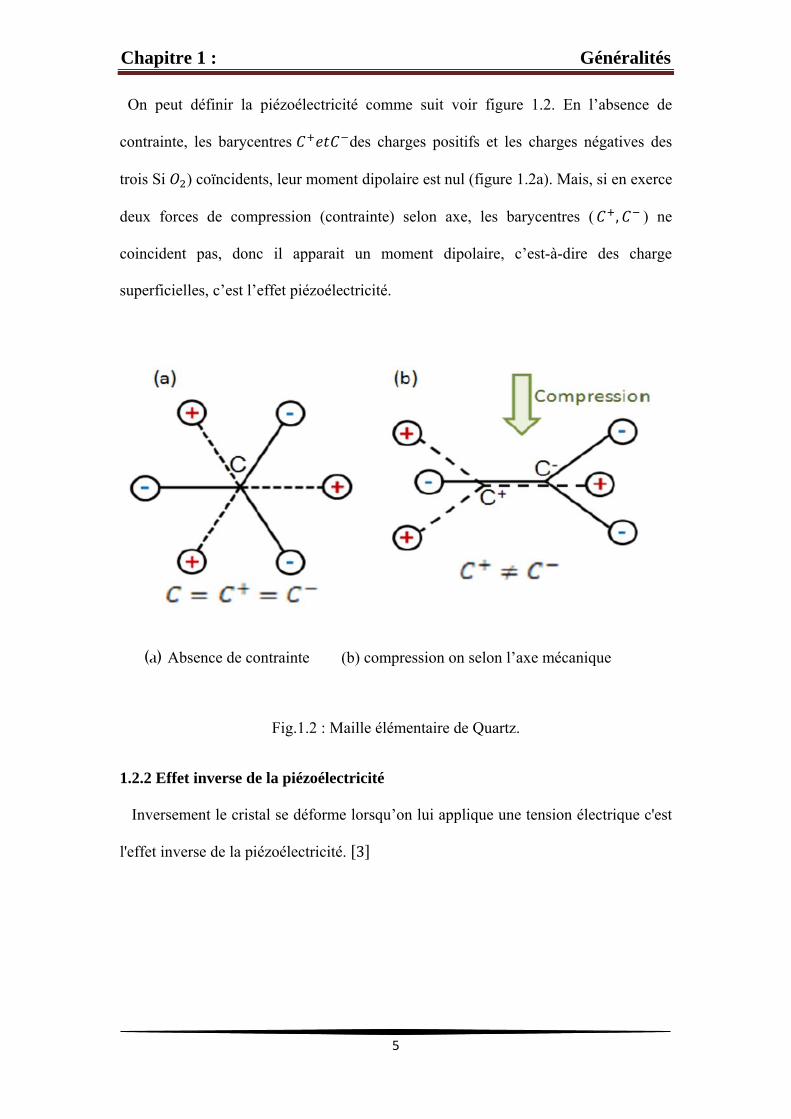
En prenant l’exemple de la structure du titanate du plomb (matériel qu’on veut
utiliser) les anions oxygène forment les sommets des octaèdres tandis que les cations
Pb2+ et Ti4+ occupent respectivement leur centre et les sites entre les octaèdres La
pression stimule un déplacement du cation central Ti4+ ce qui provoque une
répartition irrégulière des charges, c'est-à-dire que dans une partie du cristal il ya plus
de cation que d’anions et une déformation du nuage électronique. 3
Fig.1.3 : Exemple de la structure du titanate du plomb
Chapitre 1 : Généralités
7
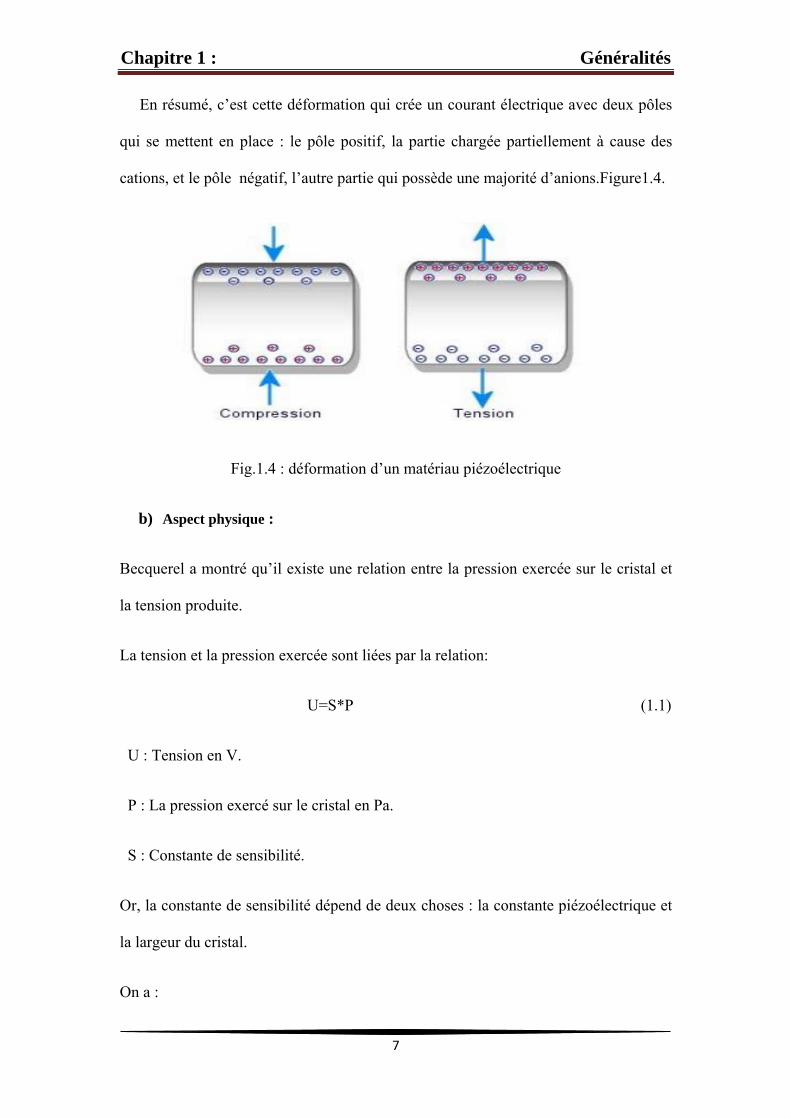
En résumé, c’est cette déformation qui crée un courant électrique avec deux pôles
qui se mettent en place : le pôle positif, la partie chargée partiellement à cause des
cations, et le pôle négatif, l’autre partie qui possède une majorité d’anions.Figure1.4.
Fig.1.4 : déformation d’un matériau piézoélectrique
b) Aspect physique :
Becquerel a montré qu’il existe une relation entre la pression exercée sur le cristal et
la tension produite.
La tension et la pression exercée sont liées par la relation:
U=S*P (1.1)
U : Tension en V.
P : La pression exercé sur le cristal en Pa.
S : Constante de sensibilité.
Or, la constante de sensibilité dépend de deux choses : la constante piézoélectrique et
la largeur du cristal.
On a :
Chapitre 1 : Généralités
8
S=k*h (1.2)
k : Constante piézoélectrique.
h : La largeur du cristal en m.
Donc, on peut tirer que :
U= k*h*P (1.3)
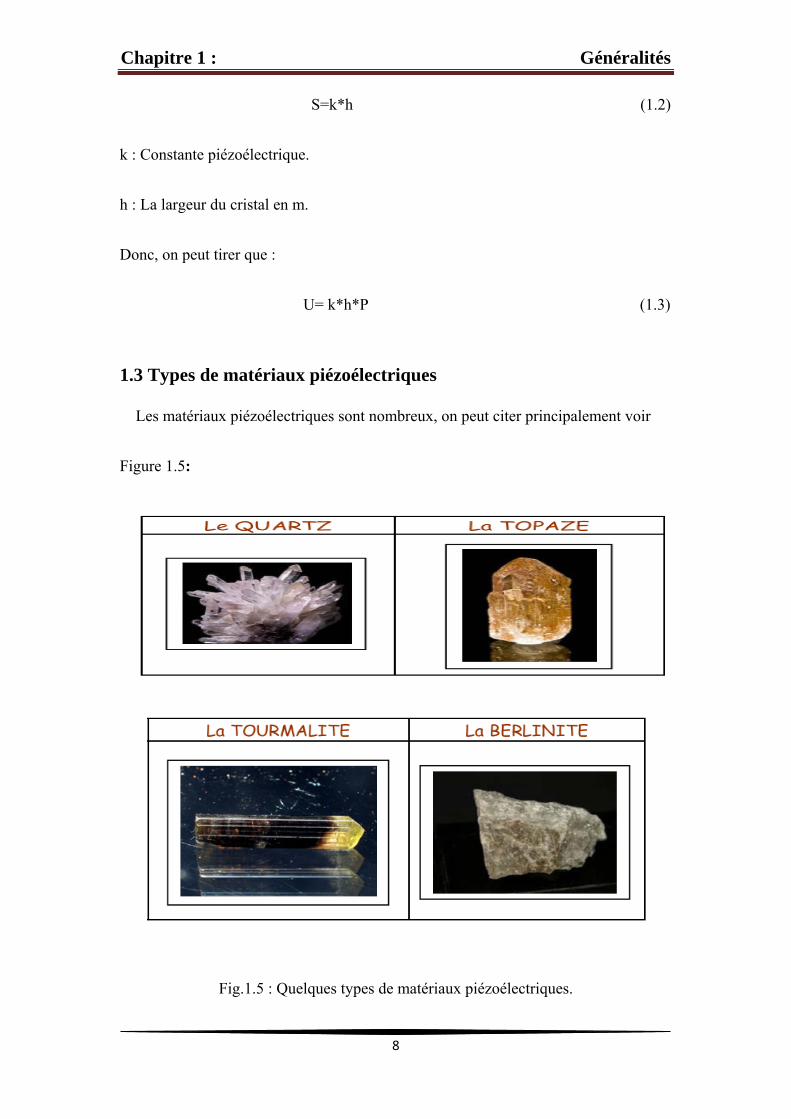
1.3 Types de matériaux piézoélectriques
Les matériaux piézoélectriques sont nombreux, on peut citer principalement voir
Figure 1.5:
Fig.1.5 : Quelques types de matériaux piézoélectriques.
Chapitre 1 : Généralités
9
Rapidement après la découverte de la piézoélectricité, plusieurs matériaux ayant
cette caractéristique ont été trouvés. Néanmoins des nouveaux matériaux continuent à
apparaître, toujours avec des meilleures caractéristiques et performances. Maintenant
les matériaux, leurs présentations, leurs tailles, peuvent s’adapter à leurs applications
pratiques et non l’inverse comme on le faisait il ya quelques années. C’est pour cela
que les innovations dans le domaine de la piézoélectricité sont à l’ordre du jour.
Les matériaux piézoélectriques peuvent être soit des cristaux ou matières minérales
naturelles, soit des créations de l’homme.
Cristaux naturels : Berlinite,Quartz, Topaze,
D’autres matériaux : Los, L’émail dentaire.
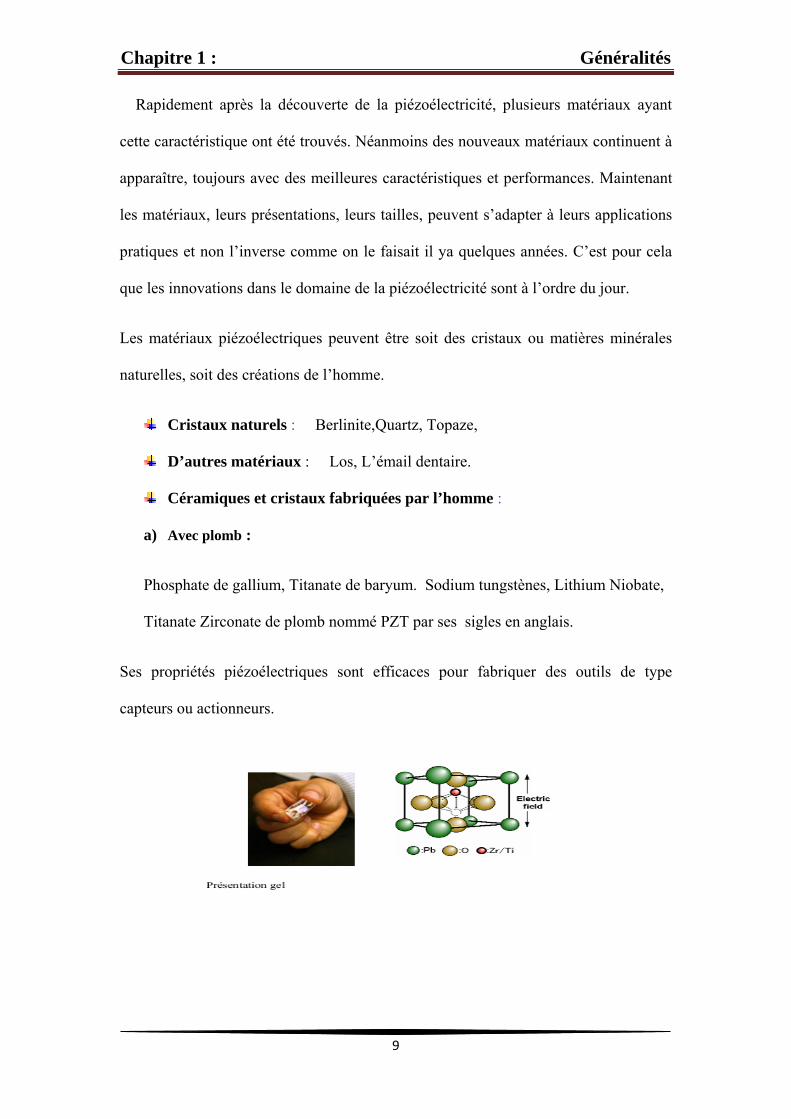
Céramiques et cristaux fabriquées par l’homme :
a) Avec plomb :
Phosphate de gallium, Titanate de baryum. Sodium tungstènes, Lithium Niobate,
Titanate Zirconate de plomb nommé PZT par ses sigles en anglais.
Ses propriétés piézoélectriques sont efficaces pour fabriquer des outils de type
capteurs ou actionneurs.
Chapitre 1 : Généralités
10
Fig.1.6 : Quelques outils piézoélectriques
b) Sans plomb
Sodium Potassium Niobate, Ferrite de Bismuth, Titanate de Bismuth. [4]
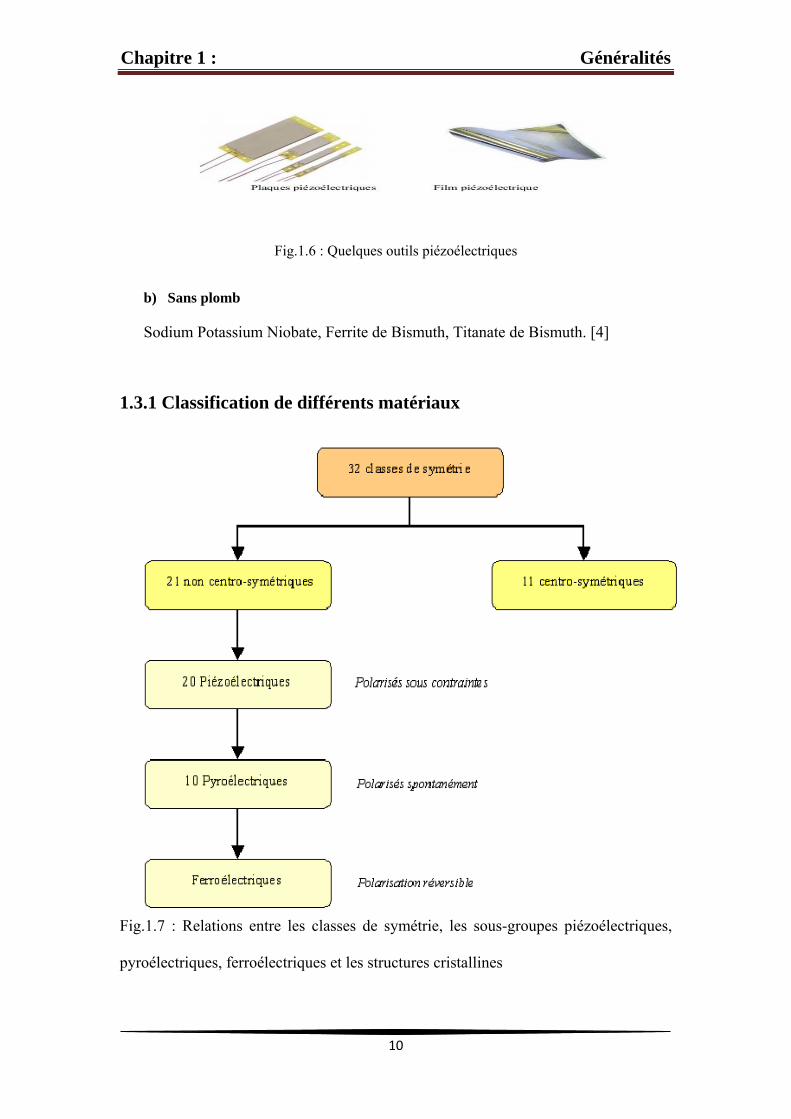
1.3.1 Classification de différents matériaux
Fig.1.7 : Relations entre les classes de symétrie, les sous-groupes piézoélectriques,
pyroélectriques, ferroélectriques et les structures cristallines
Chapitre 1 : Généralités
11
Remarques
Les matériaux pyroélectriques sont aussi piézoélectriques, mais la réciproque
n'est pas vraie.
Les effets piézoélectriques et pyroélectriques ne peuvent être observés que
dans les diélectriques. Dans tout ce qui va suivre, nous négligerons
systématiquement l'influence de la pyroélectricité et de la température dans les
expressions générales des matériaux piézoélectriques. [5].
1.4 Applications du phénomène de la piézoélectricité
1.4.1.L’effet direct
1.4.1.1 Capteurs
La première application industrielle et la plus présente de nos jours des
piézoélectriques est pour des capteurs, ils sont appelés transducteurs piézoélectriques.
Grâce à la capacité des piézoélectriques de créer une tension dès qu’une force est
appliquée, ils sont utilisés pour une grande variété de capteurs :
1.4.1.1.1 Accéléromètres
Un cylindre avec une bille et un capteur piézoélectrique sur chaque base permet de
détecter le mouvement et la vitesse sur un axe. Plusieurs accéléromètres sont placés
dans les systèmes pour pouvoir capter le mouvement sur tous les axes comme dans la
manette de la console de jeux vidéo ou dans quelques systèmes de sécurité routière.
Chapitre 1 : Généralités
12
1.4.1.1.2Capteurs de vibration
Des capteurs piézoélectriques sont utilisées pour capter les vibrations qui sont aussi
une action mécanique comme sur des systèmes anti cambriolage des voitures et le
phonographe.
1.4.1.1.3 Capteurs de vibrations sonores
La première application, comme beaucoup de systèmes innovants, a été développé
par l’armée. Un système qui capte des vibrations ultrasonores créés par lui même,
grâce à une plaque de quartz, peut faire une image d’un environnement invisible ou
lointain (en calculant le temps d’aller-retour de l’onde émise puis réfléchie) :c’est le
premier sonar. De plus, ces capteurs sont utilisés pour des microphones.
1.4.1.1.4Capteurs d’impact
Des transducteurs sont placées dans des systèmes où l’on veut calculer la force
appliquée et le moment de son application comme dans des batteries (instrument de
musique) électriques ou des capteurs de proximité comme dans le métro japonais ou
les escaliers électriques qui s’actionnent uniquement quand les matériaux envoient
un signal de présence d’un utilisateur. 4
1.4.1.2 Production d’énergie
Actuellement les piézoélectriques ne sont presque pas utilisés pour la production
d’électricité à grande échelle. Mais, à petite échelle on peut citer :
1.4.1.2.1Le briquet piézoélectrique
Le briquet piézoélectrique est un exemple de création d’un arc, en appuyant sur le
bouton, l’élément piézoélectrique reçoit une pression figure 1.8.

Chapitre 1 : Généralités
13
Fig.1.8 : Effet direct
1.4.1.2.2 Implants expérimentaux utilisant la piézoélectricité
Ces implants peuvent être placés dans de nombreux endroits du corps où il ya un
mouvement constant. Le mouvement respiratoire est le cas le plus clair, mais il y a
beaucoup d'autres cas. Le cas le plus connu pour l’utilisation de cet implant est celui
du pacemaker figure 1.9.
Fig.1.9 : Un pacemaker à base de matériaux piézoélectrique
1.4.1.2.3Produire de l’énergie en marchant
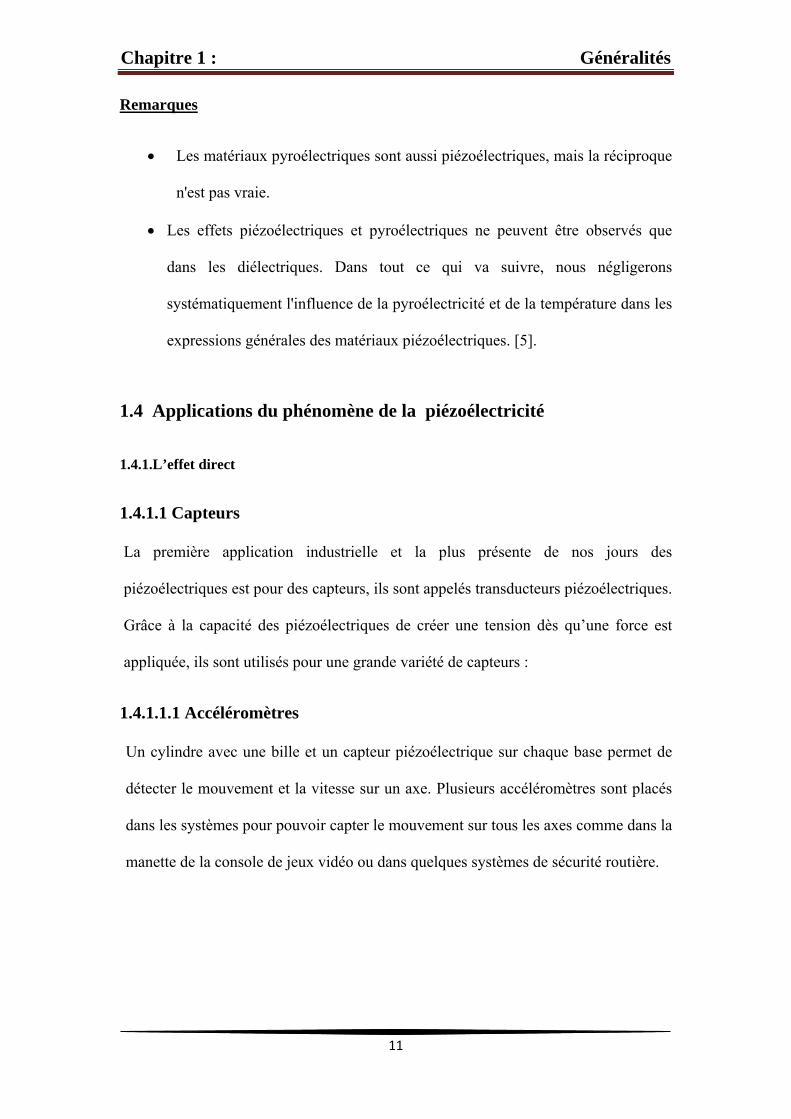
Il existe aussi des chaussures pour produire de l'énergie en marchant. Un élément
piézoélectrique est introduit dans les semelles d’une paire de chaussures. L’armée
Chapitre 1 : Généralités
14
américaine a déjà ce système pour recharger tous les appareils électriques tels que les
walkies-talkies, radios, GPS, etc. Afin de rendre les soldats électriquement
indépendants figure 1.10.
Fig.1.10 : Elément piézoélectrique
Pour rendre le trajet lumineux et clair quand il fait noir, il existe des chaussures de
course équipées de polymères électroluminescents alimentés par des générateurs
piézoélectriques. Ces chaussures aident les sportifs à éclairer leurs chemins sans avoir
à transporter quoi que ce soit.
1.4.1.2.4Parking piézoélectrique
Dans la ville de Gloucester, en Angleterre, un parking de grande surface commerciale
a été équipé de matériaux piézoélectriques. Cette installation permet de récupérer de
l'énergie à chaque passage de véhicule et, ainsi, d'alimenter les caisses de paiement du
supermarché.
1.4.1.2.5 Métro piézoélectrique à Tokyo
De même, dans le métro de Tokyo, on a équipé le sol des stations de plaques
piézoélectriques qui produisent de l'énergie au passage des centaines de passagers
descendant des wagons figure 1.11.
Chapitre 1 : Généralités
15
Fig.1.11 : Métro piézoélectrique à Tokyo
1.4.1.2.6Une autoroute électriquement autonome
Une recherche en Palestine par les colons juifs consiste à placer des matériaux
piézoélectriques sous la surface de la route pour que l'énergie mécanique des voitures
puisse être capturée et transformée en électricité. Les routes deviennent donc des
sources de production d'énergie figue 1.12. 4
Fig.1.12 : Route principale en Palestine qui va du Nord au Sud du pays.
Chapitre 1 : Généralités
16
1.4.2L’effet inverse
1.4.2.1 Les générateurs de vibrations
Une autre application importante dans l’industrie est celle de l’effet piézoélectrique
inverse, grâce à la capacité de vibrer des matériaux piézoélectriques lorsqu’un courant
leurs est appliqué.
1.4.2.2 Générateurs de son audible
Des transducteurs piézoélectriques sont utilisées aussi pour produire du son, ils sont
utilises dans des écouteurs normaux ou flexibles, des buzzers, même dans des
systèmes qui ne peuvent être écoutés que quand on les mord.
1.4.2.3 Horloges
Dans les montres, les chronomètres, un cristal de quartz vibre toujours à la même
fréquence et cette vibration est mesurée et permet d’indiquer le temps écoulé.[4]
1.5 Les équations de Maxwell
Les équations de maxwell traitant le phénomène électromagnétique sont :
- Equation de conservation
(1.4)
0 (1.5)
Chapitre 1 : Généralités
17
- Equation de couplage électromagnétique
(1.6)
(1.7)
Le système d’équation de Maxwell généralisées ne suffit pas à la détermination du
champ électromagnétique (E,B,D,H). Rien d’ailleurs, dans le système qu’elles
constituent, ne vient caractériser le milieu matériel où il ya propagation, ce qui suffit à
prouver leur insuffisance pour permettre un calcul du champ associé. Dans un milieu
donné à une électromagnétique donnée, il convient d’ajouter des relations qui
précisent les propriétés spécifiques du milieu étudié. Les équations prennent la forme
suivante :
- une équation de proportionnalité entre D et E
(1.8)
: Constante électrique
P : Vecteur de polarisation
- Une relation de proportionnalité entre B et H
(1.9)
: Perméabilité
Les équations (1.4),(1.5),(1.6),(1.7) décrivent globalement tous les phénomène
électromagnétique.[6]

Chapitre 1 : Généralités
18
1.6Rappel sur les tenseurs
La notion de tenseur apparaît des qu’on cherche à établir des relations linaires. Un
tenseur de rang « r » c’est un ensemble de 3 . Composantes repérer par « r » indice
qui dans un changement d’axe se transforme de la manière suivante .[2]
A′……… …….. ⋯ . α α α ……… . . A……….. …… 1.10
1.6.1Nombre de module d’élasticité indépendante
La symétrie ponctuelle des autres symétries cristallines intervient réduit le nombre
des modules élastique indépendantes. Les axes étant orthonormés, la condition
générale d’invariance s (1.10)’s’écrit pour les tenseurs de rigidité
(1.11)
Les cristaux du système triclinique ont (21) constantes élastiques, les cristaux du
système monoclinique la matrice α de changement de repère est diagonale
1 0 00 1 00 0 1
La notion (1.11) devient
(1.12)
La matrice de suivante contient 13 constante indépendante celle dont le regroupement
d’indices comprend 0, 2,4 fois l’indice 3
Chapitre 1 : Généralités
19
1.6.2Nombre de constantes piézoélectriques indépendantes
0 00 0
00
00
0 00 00 0
0 0
La condition d’invariance des composantes de tenseurs piézoélectrique dans
l’opération de symétrie correspond à la matrice de changement de base α
(1.13)
Les cristaux de symétrie 32 en possèdent que deux constantes piézoélectriques
indépendantes
0 0 0
0 0 0 0 0 0 0 0 0 0
1.6.3Nombre de constants diélectriques indépendants
Le tenseur diélectrique défini par la relation
est symétrique
La condition d’invariance (1.10) s’écrit
(1.14)
Les cristaux de symétrie trigonale ne possèdent que deux constantes diélectrique
indépendants 0 0
0 00 0
Pour les autres systèmes voir Annexe.1.[2]
Chapitre 1 : Généralités
20
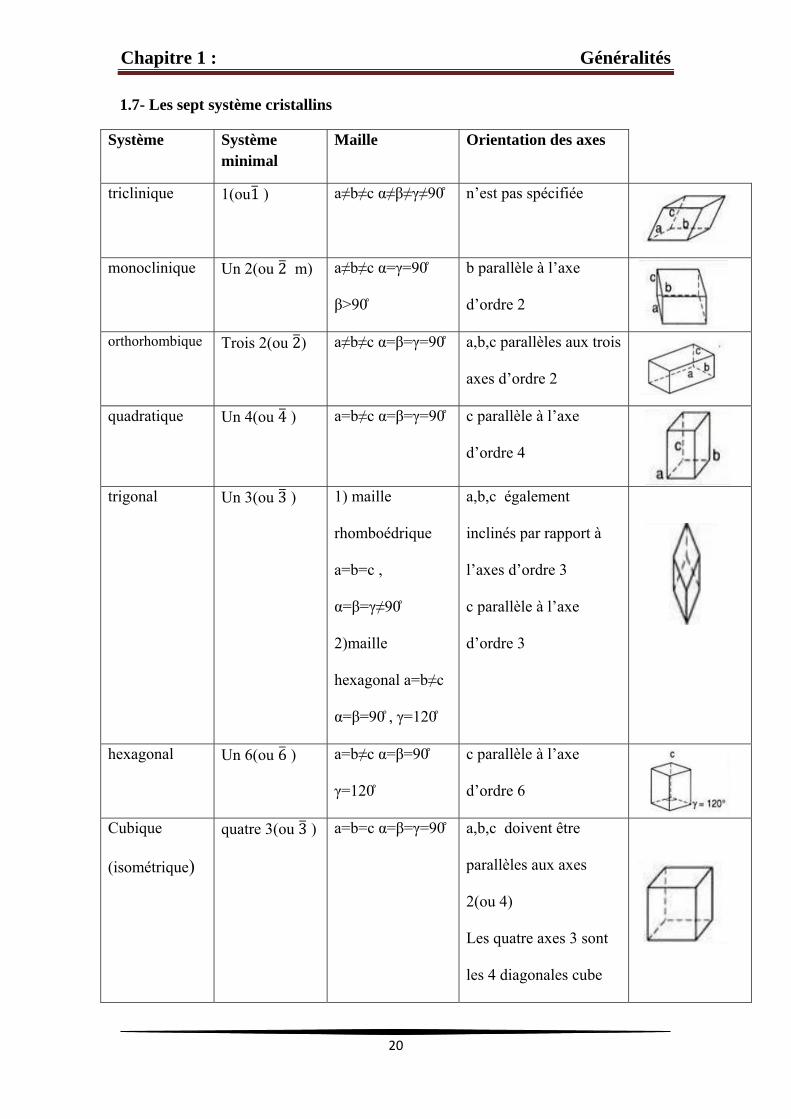
1.7- Les sept système cristallins
Système Système minimal
Maille Orientation des axes
triclinique 1(ou1 ) a≠b≠c α≠β≠γ≠90̊ n’est pas spécifiée
monoclinique Un 2(ou 2 m) a≠b≠c α=γ=90̊
β>90̊
b parallèle à l’axe
d’ordre 2
orthorhombique Trois 2(ou 2) a≠b≠c α=β=γ=90̊ a,b,c parallèles aux trois
axes d’ordre 2
quadratique Un 4(ou 4 ) a=b≠c α=β=γ=90̊ c parallèle à l’axe
d’ordre 4
trigonal Un 3(ou 3 ) 1) maille
rhomboédrique
a=b=c ,
α=β=γ≠90 ̊
2)maille
hexagonal a=b≠c
α=β=90̊ , γ=120̊
a,b,c également
inclinés par rapport à
l’axes d’ordre 3
c parallèle à l’axe
d’ordre 3
hexagonal Un 6(ou 6 ) a=b≠c α=β=90̊
γ=120 ̊
c parallèle à l’axe
d’ordre 6
Cubique
(isométrique)
quatre 3(ou 3 ) a=b=c α=β=γ=90̊ a,b,c doivent être
parallèles aux axes
2(ou 4)
Les quatre axes 3 sont
les 4 diagonales cube
Chapitre 2 :
Modélisation d’un corps
solide anisotrope
Déformation électroélastique
Module de déformation électroélastique
Les conditions aux limites
Résumé :
Dans le deuxième chapitre, on a est arrivé à modéliser le phénomène de la
piézoélectricité en arrivant à un système d’équations différentielles dont leur solution
donne les valeurs du déplacement et le potentiel électrique, en se basant sur l’effet direct c-
à-dire application d’une force extérieure.
Chapitre 2 : Modélisation d’un corps solide anisotrope
21
Chapitre 2 : Modélisation d’un corps solide anisotrope
2.1Déformationélectroélastique
Pour décrire les phénomènes physiques dans la structure piézoélectrique, on a besoin des
équations d’état liant les contraintes, les déformations et les champs électrique. On peut
obtenir les équations d’état compte tenu de l’effet piézoélectrique en se fondant sur les
considérations thermodynamiques, les forces est agissantes sur un piézoélectrique sont à les
fois d’origine mécanique et d’origine électrique. Le travail qu’il faut fournir pour modifier
l’état de cristal comprend d’une é é 2
Donc :
∆ é é (2.1)
Avec :
U : énergie interne
T : Température
S : Entropie
Tel que :
Travail des champs électrique :
é (2.1.a)
: Champ électrique.
: Vecteur déplacement.

Chapitre 2 : Modélisation d’un corps solide anisotrope
22
Travail des contraintes mécanique :
é (2.1.b)
: Composante du tenseur de contrainte.
: Composante du tenseur de déformation.
La variation totale de (2.1) en tenant compte de (2.1.a) (2.1.b) s’écrit :
(2.2)
Introduisant de potentielles thermodynamiques (énergie de GIBBES) qui lie les contraintes,
les déformations et le champ électrique du déplacement.
(2.3)
La différentielle totale de l’équation (2.3), en tenant compte de l’équation (2.2), s’écrit :
. . - . – Dd –TdS – S
. – Dd – S
On néglige l’effet thermique, l’expression de dG devient :
. – Dd
+ (2.4)
Il ressort de l’équation (2.4) :

Chapitre 2 : Modélisation d’un corps solide anisotrope
23
Considérons les différentielles totales de , , En série Taylor, dans de
domaine déformation nulle et de champ nul d’un cristal piézoélectrique
, (2.5)
, + (2.6)
0n déduire de l’équation (2.4) :
(2.7)
Les dérivées partielles peuvent être considérées comme des contraintes. En tenant compte de
l’équation (2.7) on obtient :
(2.8)
(2.9)
Avec : = , ,
: Tenseur des modules d’élasticité.
: Tenseur des contraintes piézoélectriques.
: Tenseur des contraintes d’électriques.

Chapitre 2 : Modélisation d’un corps solide anisotrope
24
Les équations (2.8) et (2.9) expriment le couplage électromécanique du matériau
Pour simplifier l’écriture des équations (2.8) et (2.9) on peut adopte l’écriture suivante d’après
de schéma suivant :
1⟶ 11 2 ⟶ 22 3 ⟶ 33 4 ⟶ 235 ⟶ 13 6 ⟶ 12
C-a- dire qu’on peut écrire la tenseur sans la forme contrainte suivante :
Avec:
i,j,k,l, n=1, 2 ,3
, 1,2,3,4,5,6
Ceci donne :
1111 11, 1211 61, 2111 61, 2211 21
1112 16, 1212 66, 2112 66, 2212 26
1112 16, 1221 66, 2121 66, 2121 66
1112 16, 1222 62, 2122 62, 2122 62
(2.10)
2.2 Module de déformation électroélastique
Les contraintes planes proportionnelles aux déformations pour les corps linéairement
élastiques.[2]
(2.11)
[C] matrice de rigidité du matériau.

Chapitre 2 : Modélisation d’un corps solide anisotrope
25
Les équations du mouvement d’un milieu piézoélectrique s’écrivent [2]
(2.12)
: Masse volumique
:Déplacement dans la direction i.
On sait que les composantes du tenseur de déformation se traduisent par :
(2.13)
La substitution de (2.10), (2.13) et (2.8) et on tenant compte de (2.11) l’équation (2.12)
devient :
=
= Puisque elle est inchangé
Dérivant l’équation (2.8) par rapport à j.
En prenant en compte l’équation (2.13) :
-
On remplaçant dans l’équation (2.12) avec

Chapitre 2 : Modélisation d’un corps solide anisotrope
26
Le champ électrique quasi statique ∅
D’où ∅
Donc :
(2.14)
Dans le cas permanent l’équation (2.14) s’écrit :
0(2.15)
Par ailleurs l’induction électrique doit satisfaire l’équation de poisson, en l’absence des
charges électrique.
=0 ⟹ =0
De L’équation (2.10) :
0
∅
0(2.16)
Les équations (2.15) et (2.16) conduit au système de la l’éctroélasticité suivant :
Chapitre 2 : Modélisation d’un corps solide anisotrope
27
∅0
∅0
(2.17)
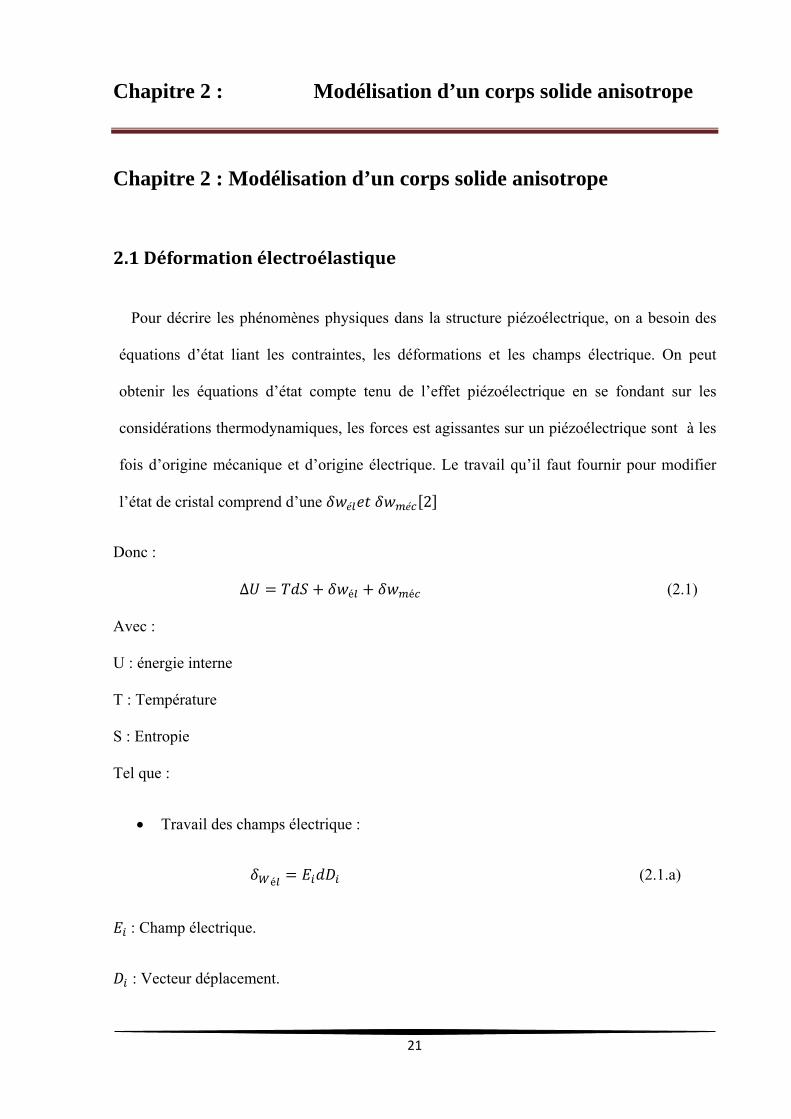
2.3 Les conditions aux limites
On veut essayer de traiter l’effet direct (effet mécanique) c’est-à-dire que la plaque a étudiée
est soumise à des forces mécaniques. Pour résoudre le système (2.17) Nous avons imposé des
hypothèses pour simplifier le problème. Nous avons négligé :
- Les forces de gravité
- Le vecteur de polarisation
On impose aux extrémités de la plaque figure 2.1 des forces de compression constantes
- Sur limite 3 tout simplement lim 3 X= ± L → F= cte (N)
On impose au milieu de la plaque des déplacements nuls, vertical (v=0) et horizontale (u=0)
Lim 3
Lim 2
Lim 3 Lim 2
F
Fig. 2.1 : La plaque avec les conditions aux limites
Chapitre 3 :
Résolution du modèle par la
méthode des éléments finis
La méthodes des éléments finis
Description et application
Résumé:
Ce chapitre est consacré là la présentation de la méthode des éléments finis. On a
commencé par la description des différentes étapes conduisant à la construction de la
matrice de rigidité et la solution du système obtenu au chapitre deux par une méthode
numérique. Pour avoir des valeurs représentatives du déplacement et le potentiel phi. .
Chapitre 3 : Résolution du modèle par la méthode des éléments finis
28
Chapitre 3 : Résolution du modèle par la méthode des éléments finis
Il existe plusieurs types des méthodes pour trouver des solutions approchées au problème
définissant la propagation de la chaleur dans une structure, parmi ces méthodes on a choisi
la méthode des éléments finis qui est largement utilisée.[7]
3.1Laméthodedesélémentsfinis
3.1.1 Introduction
La méthode des éléments-finis (MEF) est une méthode d’approximation
numérique de solutions de problèmes aux limites statiques ou dynamiques tels que :
Diffusion thermique ;
Mécanique des milieux continus (solides et fluides) ;
Electromagnétisme.
Mais en fait, absolument tous les problèmes d’équations aux dérivées partielles (EDP)
aux limites. Il s’agit, comme dans toutes les méthodes numériques, de trouver une
approximation discrète. Pour faire bref, d’un problème différentiel aux limites
linéaire, on trouve une formulation variationnelle associée équivalente, dont on
calcule une approximation de la solution en projetant sur un espace de dimension
finie, ce qui revient à résoudre au final un système linéaire.
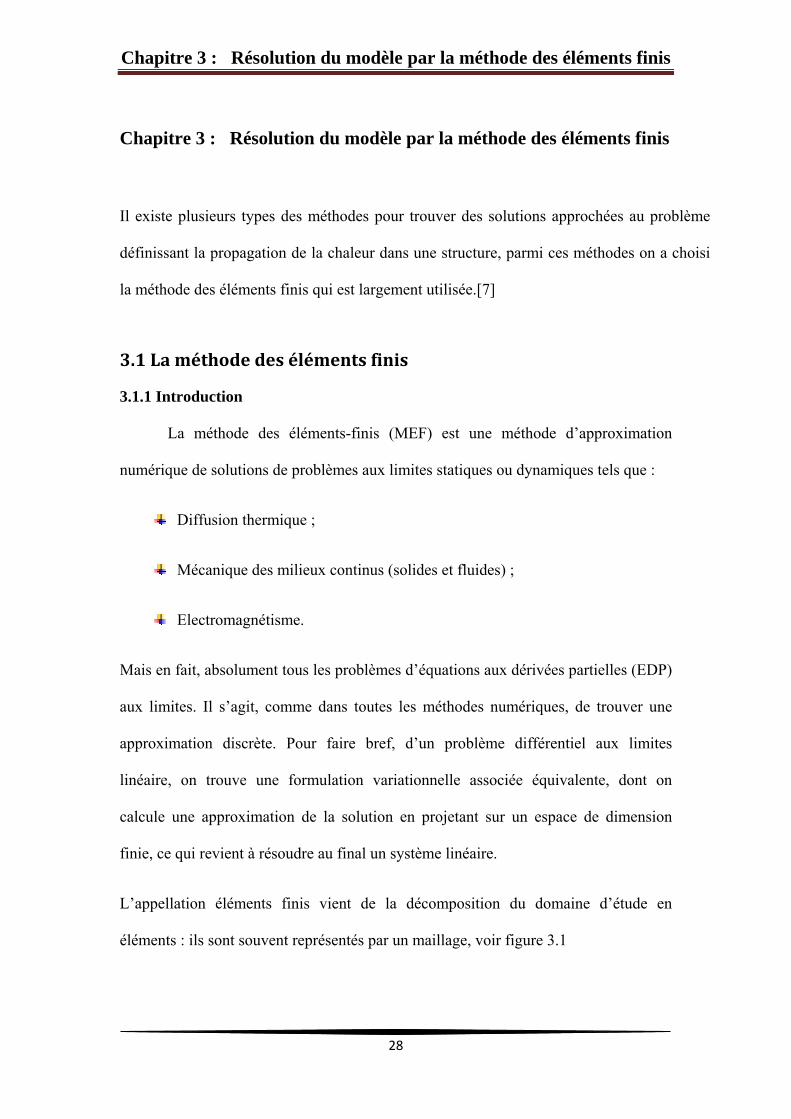
L’appellation éléments finis vient de la décomposition du domaine d’étude en
éléments : ils sont souvent représentés par un maillage, voir figure 3.1
Chapitre 3 : Résolution du modèle par la méthode des éléments finis
29
Fig.3.1 : Maillages des différentes structures
Ce qui amène le succès de la méthode et sa puissance est l’apport du calcul matriciel,
introduit par un ingénieur civil anonyme. La méthode connaît alors un développement
fulgurant accompagnée par les progressés de l’informatique.
La méthode des éléments finis est une méthode puissante basée sur une théorie
mathématique rigoureuse.
Aujourd’hui, les éléments finis sont un outil majeur, incontournable en mécanique
Chapitre 3 : Résolution du modèle par la méthode des éléments finis
30
(fluides et solides, interactions, structures), et applicable dans de nombreux domaines
impliquant des problèmes d’EDP aux limites comme par exemple en mathématiques
financières ou l’électromagnétisme.
De nombreux codes industriels (solveurs) existent et sont généralement couplés a un
logiciel de CAO1 ou Computer Aided Design (CAD) en Anglais. Citons ANSYS,
ABAQUS. FEAP, Code-Aster, Cast3M et bien d’autres.[8]
3.1.2 Exemple 2D sur maillage triangulaire
3.1.2.1 Maillage triangulaire à 3 nœuds
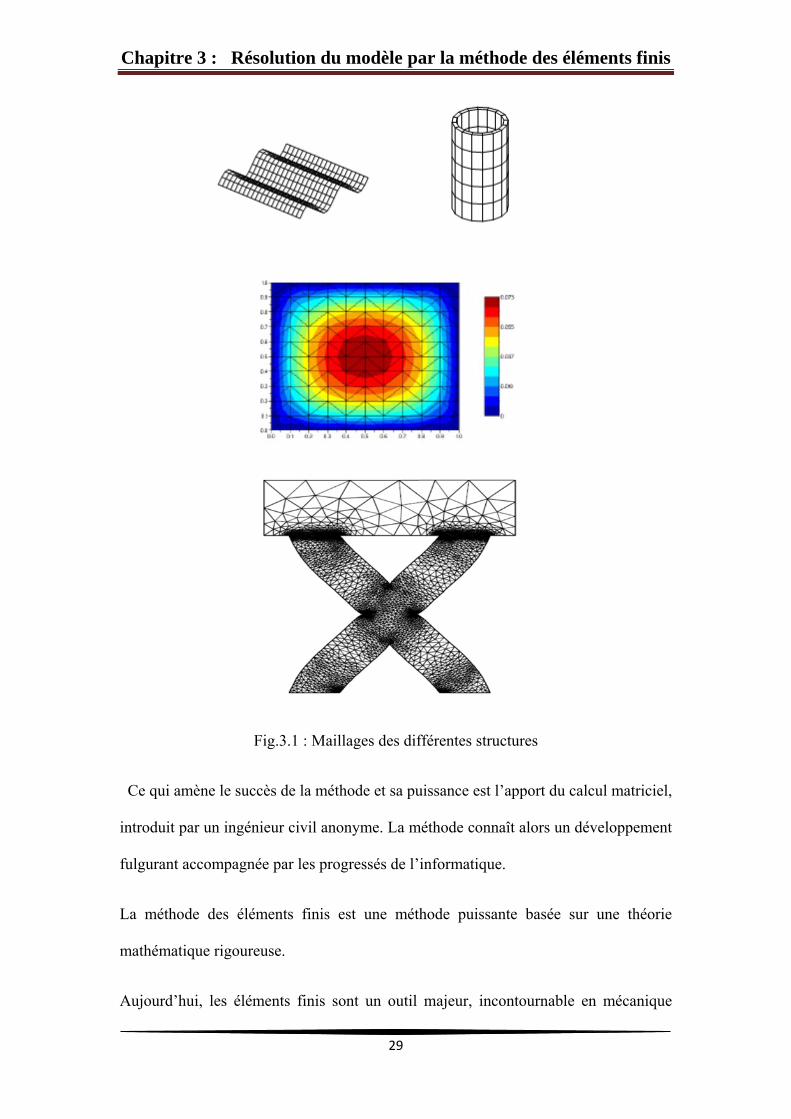
La discrétisation se base sur une subdivision du domaine en triangles. Cette
subdivision est appelé maillage, qu’on qualifie ici de triangulaire.
Fig.3.2: Exemples de maillages triangulaires d’un carré
Sur la figure 3.2, nous avons tracé 3 maillages triangulaires différents du domaine
carré.
Le premier à gauche est constitué de 2 éléments triangulaires construits à partir de 4
nœuds définissant les sommets des triangles; chaque triangle (élément) étant défini
par ses 3 sommets. La topologie des triangles peut être arbitraire à la seule condition
que les nœuds définissant les triangles, et donc les éléments du maillage, soient
exclusivement des sommets d’un triangle, autrement dit qu’un nœud ne doit pas
retrouver à l’intérieur d’une arête.

Chapitre 3 : Résolution du modèle par la méthode des éléments finis
31
Naturellement la subdivision en triangles peut être une source d’erreur dépendant de
la géométrie du domaine. Par exemple, un disque ne peut pas être exactement
subdivisé en triangles ou même en quadrangle. Ceci est un autre problème, nous
verrons ultérieurement comment estimer l’erreur qui peut résulter de l’approximation
de la géométrie.
Fig. 3.3 : Un maillage triangulaire d’un disque.
3.1.3 Maillage
Exemple 2D sur maillage quadrangulaire à 4 nœuds
La discrétisation se base sur une décomposition du domaine en quadrangles, comme
sur la figure3.5, ou nous présentons différents maillages quadrangulaires du carré :
Fig. 3.4:Exemples de maillages quadrangulaires du carré
Chaque élément quadrangulaire est donc simplement défini par une liste de 4 nœuds
représentant les 4 sommets.
Un maillage sera donc typiquement défini par une liste de nœuds, défini par leur
Chapitre 3 : Résolution du modèle par la méthode des éléments finis
32
coordonnées, et une liste d’éléments définis chacun par 4 numéros représentant les 4
nœuds sommets, voir par exemple la figure3.4.[8]
Exemple 3D Elément tétraédriques`a 4 nœuds
L’élément de référence : un tétraèdre à quatre nœuds
Fig. 3.5 : Exemple de maillages tétraédrique
3.2 Description
3.2.1 Elément et fonctions d'interpolation
3.2.1.1 Le choix des éléments de base
L'avantage primordiale pour la MEF est qu'elle permet la discrétisation d'un domaine
ayant une géométrique arbitraire (quelque soit la complexité de sa géométrie), ce
domaine peut être représenté par un assemblage d'élément simples.
Le nombre des nœuds d'un certain élément dépend du type de variables des nœuds,
dépend aussi du type de la fonction d'interpolation et type de degré de continuité. 7
a) les éléments les plus simples unidimensionnels (référence classiques):

Chapitre 3 : Résolution du modèle par la méthode des éléments finis
33
Fig.3.6 : Géométriques d'éléments à une dimension
Les transformations géométriques de la figure3.6 utilisent les fonctions
d'interpolation linéaire, quadratique et cubique définies précédemment. Pour des
éléments à deux ou trois dimensions les transformations géométriques conduisent
respectivement à des frontières
linéaires, quadratiques ou cubiques. La figure 3.7 suivante donne la position des
nœuds pour les classes d’éléments triangulaires et quadrangulaires.
b) les éléments bidimensionnels
Fig. 3.7 : Éléments à deux dimensions
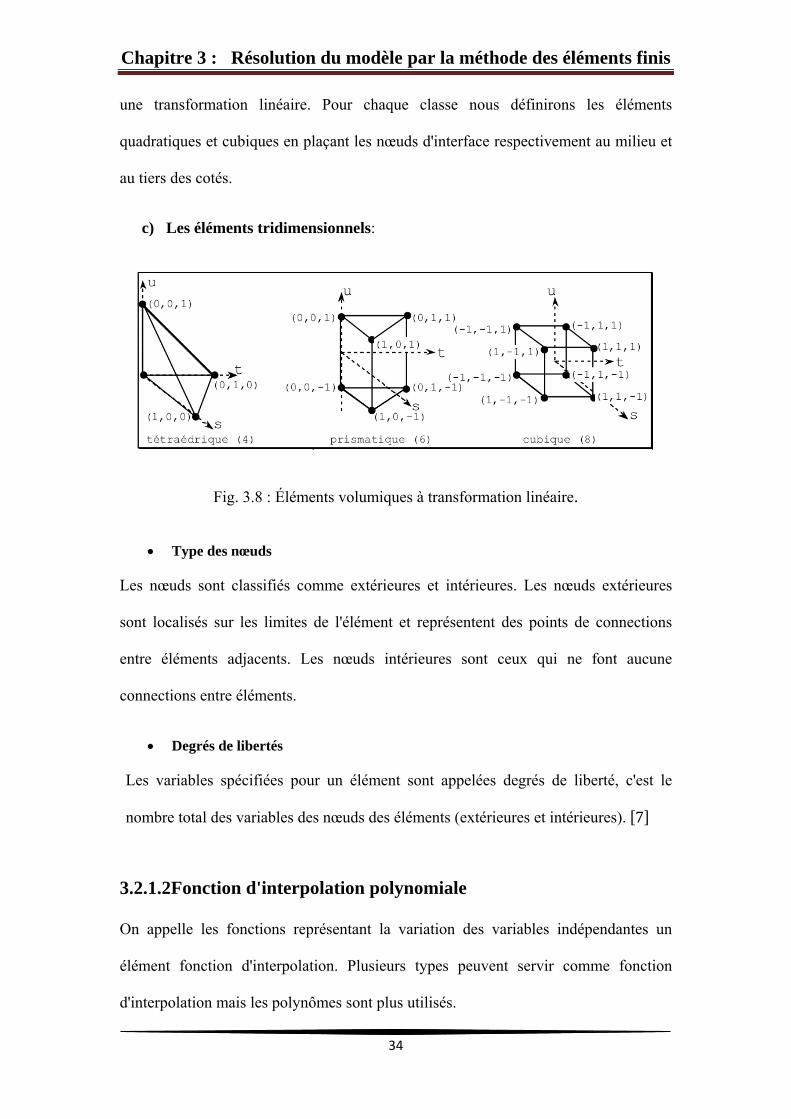
La figure 3.8 suivante représente les trois classes d’éléments volumiques associés à
Chapitre 3 : Résolution du modèle par la méthode des éléments finis
34
une transformation linéaire. Pour chaque classe nous définirons les éléments
quadratiques et cubiques en plaçant les nœuds d'interface respectivement au milieu et
au tiers des cotés.
c) Les éléments tridimensionnels:
Fig. 3.8 : Éléments volumiques à transformation linéaire.
Type des nœuds
Les nœuds sont classifiés comme extérieures et intérieures. Les nœuds extérieures
sont localisés sur les limites de l'élément et représentent des points de connections
entre éléments adjacents. Les nœuds intérieures sont ceux qui ne font aucune
connections entre éléments.
Degrés de libertés
Les variables spécifiées pour un élément sont appelées degrés de liberté, c'est le
nombre total des variables des nœuds des éléments (extérieures et intérieures). 7
3.2.1.2Fonction d'interpolation polynomiale
On appelle les fonctions représentant la variation des variables indépendantes un
élément fonction d'interpolation. Plusieurs types peuvent servir comme fonction
d'interpolation mais les polynômes sont plus utilisés.
Chapitre 3 : Résolution du modèle par la méthode des éléments finis
35
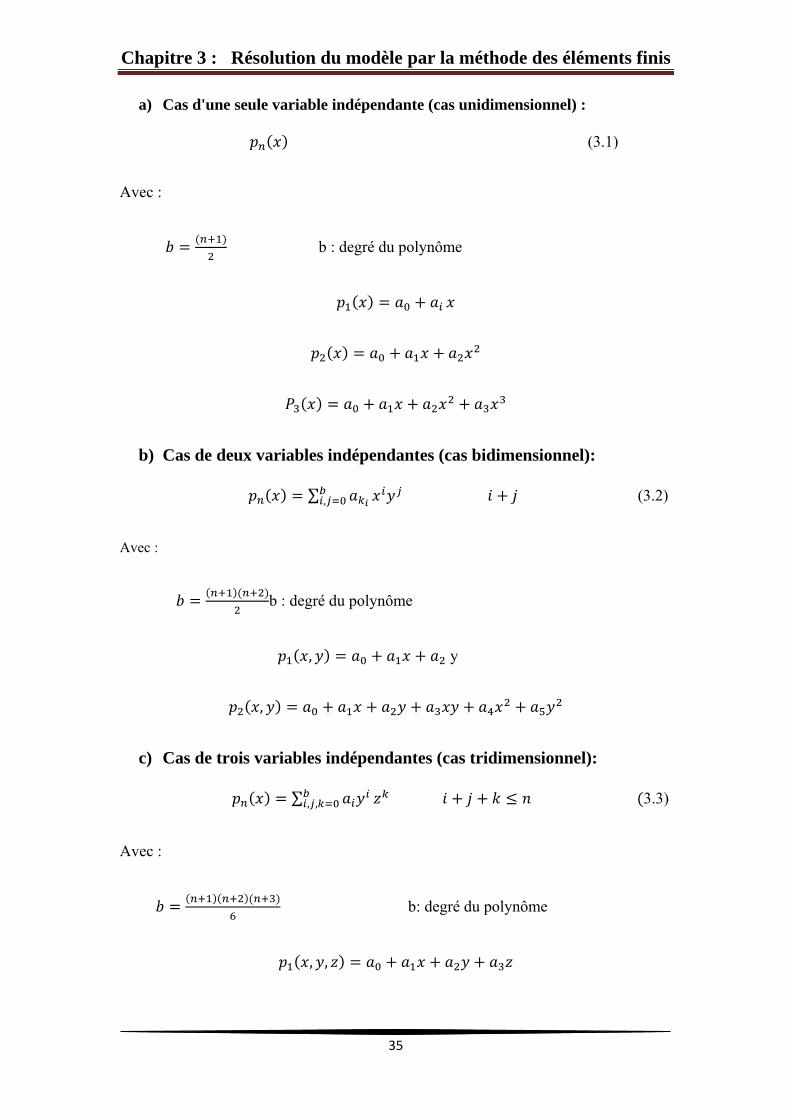
a) Cas d'une seule variable indépendante (cas unidimensionnel) :
(3.1)
Avec :
b : degré du polynôme
b) Cas de deux variables indépendantes (cas bidimensionnel):
∑ , (3.2)
Avec :
b : degré du polynôme
, y
,
c) Cas de trois variables indépendantes (cas tridimensionnel):
∑ , , 3.3)
Avec :
b: degré du polynôme
, ,
Chapitre 3 : Résolution du modèle par la méthode des éléments finis
36
, ,
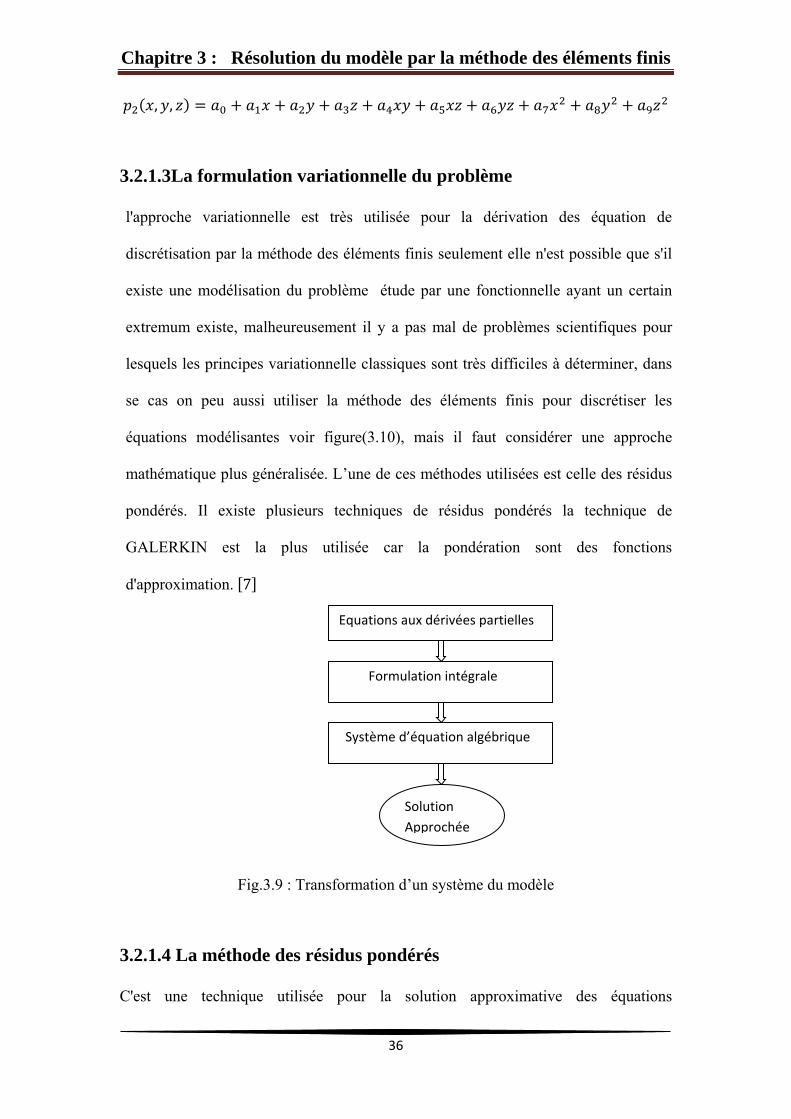
3.2.1.3La formulation variationnelle du problème
l'approche variationnelle est très utilisée pour la dérivation des équation de
discrétisation par la méthode des éléments finis seulement elle n'est possible que s'il
existe une modélisation du problème étude par une fonctionnelle ayant un certain
extremum existe, malheureusement il y a pas mal de problèmes scientifiques pour
lesquels les principes variationnelle classiques sont très difficiles à déterminer, dans
se cas on peu aussi utiliser la méthode des éléments finis pour discrétiser les
équations modélisantes voir figure(3.10), mais il faut considérer une approche
mathématique plus généralisée. L’une de ces méthodes utilisées est celle des résidus
pondérés. Il existe plusieurs techniques de résidus pondérés la technique de
GALERKIN est la plus utilisée car la pondération sont des fonctions
d'approximation. 7
Fig.3.9 : Transformation d’un système du modèle
3.2.1.4 La méthode des résidus pondérés
C'est une technique utilisée pour la solution approximative des équations
Formulation intégrale
Système d’équation algébrique
Solution
Approchée
Equations aux dérivées partielles

Chapitre 3 : Résolution du modèle par la méthode des éléments finis
37
différentielles aux dérivées partielles linéaires et non linéaires. Son application exige
deux étapes :
supposer une forme fonctionnelle pour la variable dépendante cherchée qui
satisfait l'approximativement l'équation différentielle et ses conditions aux
limites, la substitution de l'approximation dans l'équation différentielle donne
une erreur qu'on appelle résidus (R). Ce résidu doit s'annuler à l'intérieur du
domaine de la solution.
Cette technique consiste à résoudre les équations obtenues de la première
étape pour déterminer exactement la forme particulière de la fonction
d'approximation soit l'équation différentielle.
Φ f R (3.4)
On cherche une forme du champ Φ tel que
Φ Φ
Φ : Solution approchée
N : Fonction d’interpolation connue
C : Paramètres inconnus
m : Nombre de Paramètre inconnu
Les sont choisis de telle sorte qu’elles satisfont les conditions aux limites
Φ 3.5

Chapitre 3 : Résolution du modèle par la méthode des éléments finis
38
On choisit les mC de telle façon que R soit le plus petit 0
Il faut choisir les m fonctions de pondération ( ) et nous insistons que
0 (i=1,2…m) (3.6)
La forme de la des distributions de l’erreur dépend du choix de la fonction de
pondération, une fois que les W sont spécifiés, on à (m) équations algébriques ou
différentielles et dont la solution donne les . Pour une fonction
d’approximation c’est la méthode de GALERKIN
Φ 0 1,2… (3.7)
La résolution de l’équation exige le théorème de GREEN, l’application de ce
théorème nous donne l’avantage de travailler avec des dérivées d’ordre inférieur.
Théorème de GRENN
Considérons l’intégrale suivante, prise sur un domaine bidimensionnel, et que nous
désirons intégrer par parties :
∬ Ω (3.8)
Intégrons par rapport à la variable x en faisant appel à la formule bien connue
d’intégration par partie.
En introduisant les symboles, on obtient

Chapitre 3 : Résolution du modèle par la méthode des éléments finis
39
∬ Ω ∬ Ψ Ω ∬ φΨ φΨ dy (3.9)
Considérons maintenant un segment
la frontière d∑ orientée dans le sens
direct on a, pour la partie de la frontière
située à droite et a gauche
de la figure 3.10 respectivement
∑ ; ∑
Fig. 3.10 : Domaine bidimensionnel
n : Cosinus directeur de la normale projection sur l’axe des x
Après regroupement l’expression devient :
∮∑ Ψ Σ (3.10)
Il existe plusieurs contour fermes, l’intégration doit être effectuée le long de chacun de ces
conteur, l’expression générale s’écrit sous la forme suivante :
∬ Ψ
Ω ∬ Ψ Ω ∮∑ Ψ Σ
Même chose si on intègre suivant y :
∬ Ω ∬ Ψ Ω ∮ Ψ Σ
La formule de Green sous forme condensée
Ψ Ω Ψ Σ Ψ. dΩ (3.11)
Avec:
X
dY
Y2
X1
∑
d∑ D
dY
nn

Chapitre 3 : Résolution du modèle par la méthode des éléments finis
40
3.2.1.5 Construction et assemblage des matrices élémentaires
La phase d’assemblage consiste à construire les matrices K et W de la structure complète à
partir des matrices caractéristiques des différents éléments K ,W préalablement calculés.
L’assemblage comporte deux étapes :
- Construction de la matrice et de vecteur ( de chaque élément
- addition des matrices et vecteurs élémentaires
∑∑
(3.12)
Avec
[ ] la matrice élémentaire, [ ] le vecteur élémentaire, {U} le vecteur de déplacement pour
bien expliqué les deux étapes précédentes, prenons l’exemple d’un élément à deux nœuds (I ,
J) chacun ayant un degrés de liberté
0 (3.13)
Expansion
Pour que la matrice du système reste inchangée si l’on remplace le vecteur élémentaire par un
vecteur global, il faut remplacer [K] de dimension (2x2) par une matrice ′ de dimension
(2xN) dont la colonne I et la colonne J sont respectivement :
; (3.14)
Et dont toutes les autres colonnes sont nulles

Chapitre 3 : Résolution du modèle par la méthode des éléments finis
41
00…… 00…… 0……000…… 00…… 0……0 3.15
Il faut remplacer encore la matrice de (2XN) par la matrice ′ de(NXN) dont la
ligne1 est la première de ′ et dont la linge J est la seconde ligne de et dont les autres lignes
sont nuls
0 0 0 00 0000
0
0
0
0
000
(3.16)
3.2.1.5.1 Expansion du vecteur élémentaire
(3.17)
Pour que le vecteur reste inchangé, il faut remplacer f de(2X1) par le vecteur
de(NX1) dont le terme I et le terme J et dont les autres sont nuls
00
00
00
(3.18)
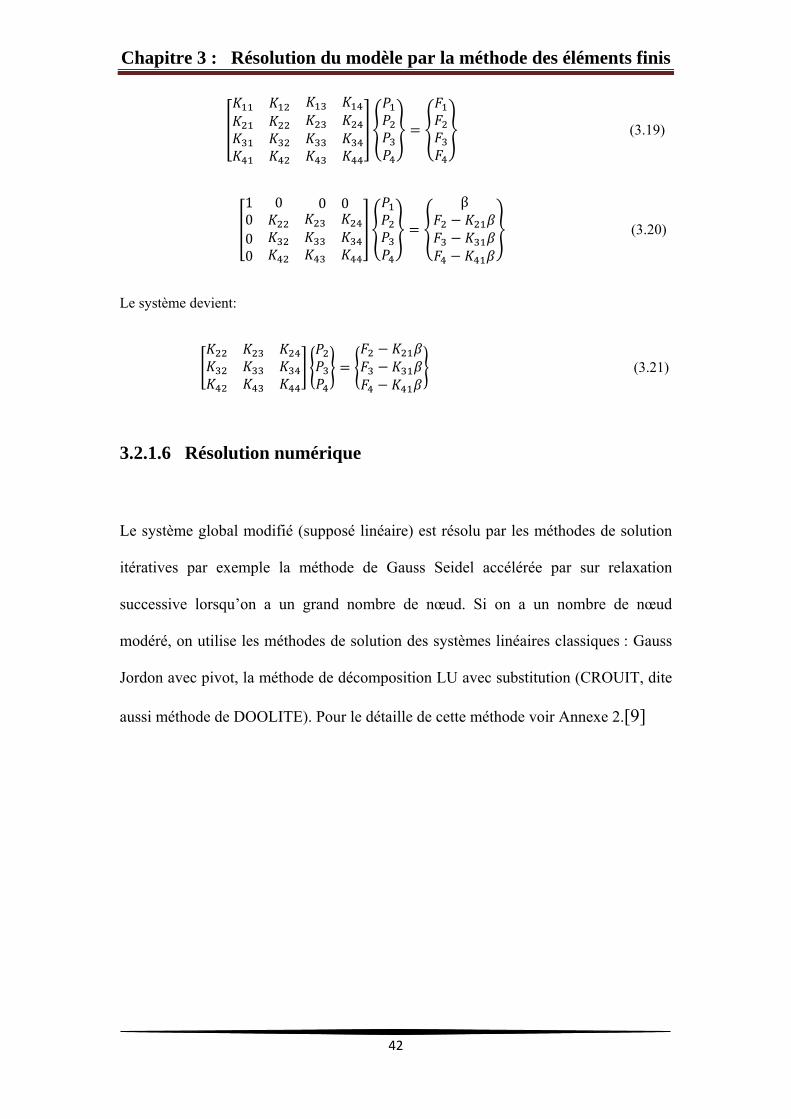
3.2.1.5.2 Introduction les conditions aux limites
La méthode de supprimer des équations consiste à restructurer la matrice K de manière à
supprimer les équations correspondantes aux degrés de liberté imposés(β), elle à l’avantage
de réduire le nombre d’inconnues du système, la restriction de et F correspondant à P
=β conduit à supprimer les autres équations. 6
Soit le système suivant :
Chapitre 3 : Résolution du modèle par la méthode des éléments finis
42
(3.19)
1 0 0 0000
β
(3.20)
Le système devient:
(3.21)
3.2.1.6 Résolution numérique
Le système global modifié (supposé linéaire) est résolu par les méthodes de solution
itératives par exemple la méthode de Gauss Seidel accélérée par sur relaxation
successive lorsqu’on a un grand nombre de nœud. Si on a un nombre de nœud
modéré, on utilise les méthodes de solution des systèmes linéaires classiques : Gauss
Jordon avec pivot, la méthode de décomposition LU avec substitution (CROUIT, dite
aussi méthode de DOOLITE). Pour le détaille de cette méthode voir Annexe 2.[9]
Chapitre 4 :
Application à la méthode
des éléments finis
Géométrie des éléments finis
Fonction d’interpolation
Résumé :
Dans ce chapitre on va essayer de concrétiser les étapes de résolution
des équations différentielles cité au chapitre précédent. En traitant le
système trouvé au chapitre deux

Chapitre 4 : Application à la méthode des éléments finis
43
Chapitre 4 : Application à la méthode des éléments finis
4.1.Géométriedesélémentsfinis
Cette étape consiste à subdiviser le domaine en élément fini de forme simple de
manière à approximer le milieu possible sa géométrie. Il s’agit ici d’un triangle à trois
nœuds voir figure (4.1). Chaque élément à 9DDL deux déplacements et un potentiel
électrique.[2]
X
X
Domaine d’étude élément avec D.D.L
Fig 4.1 : Géométrie de l’élément
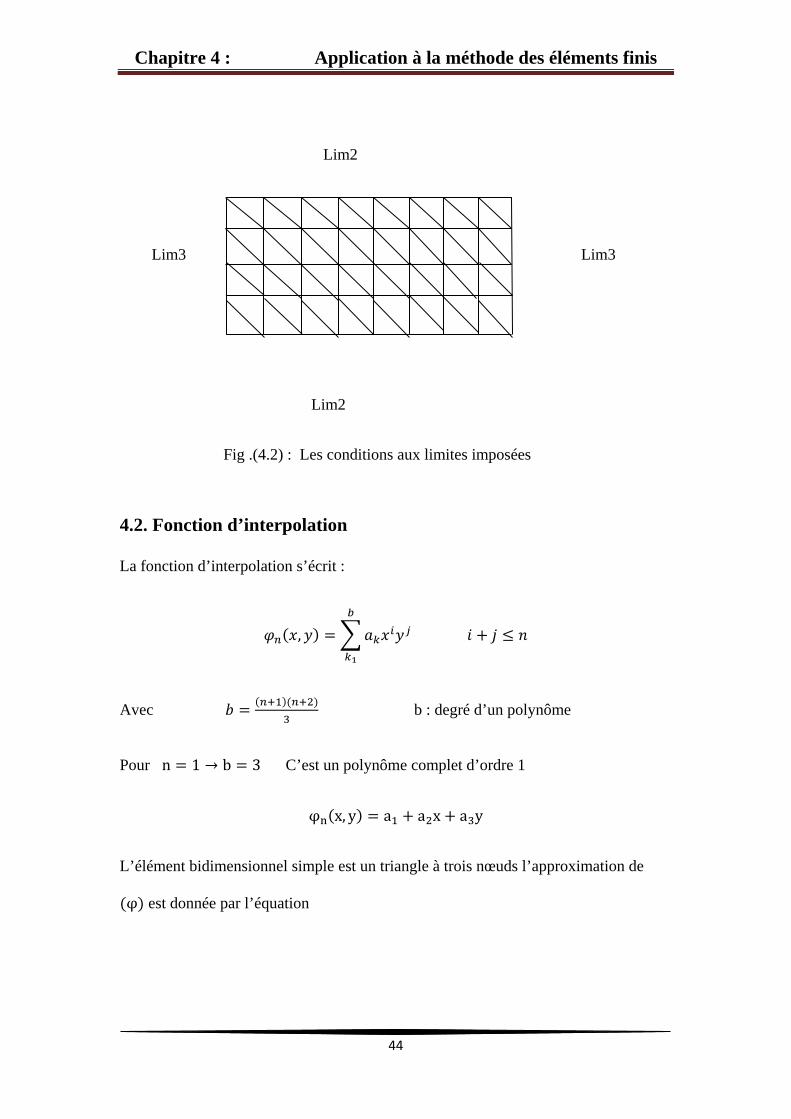
Le domaine D est subdivisé par des segments horizontaux et verticaux pour avoir des
carrés. Chaque carré est divise en deux triangles pour former un maillage. Dans notre
cas en a choisi par exemple 45 nœuds et 64 éléments. Les frontières sont appelées
lim2 pour la frontière libre (aucune sollicitation appliquées et lim 3 là où la charge est
appliquée.
yij
yk
yjj
xi xk xjj
I(u,v,φ j(u,v,φ)
k(u,v,φ)Y
Y
Chapitre 4 : Application à la méthode des éléments finis
44
Lim2
Lim3 Lim3
Lim2
Fig .(4.2) : Les conditions aux limites imposées
4.2. Fonction d’interpolation
La fonction d’interpolation s’écrit :
,
Avec b : degré d’un polynôme
Pour n 1 → b 3C’est un polynôme complet d’ordre 1
φ x, y a a x a y
L’élément bidimensionnel simple est un triangle à trois nœuds l’approximation de
φ est donnée par l’équation

Chapitre 4 : Application à la méthode des éléments finis
45
φ x, y β β x β y (4.1)
Pour chaque nœud l’équation s’écrit :
φ x, y β β x β yφ x, y β β x β y
φ x, y β β x β y (4.2)
La solution du système (4.2) donne les
111
111111
2Δ
111111
2Δ

Chapitre 4 : Application à la méthode des éléments finis
46
111111
2Δ
Donc, l’équation (4.2) devient :
∆
∆
∆
(4.3)
∆∶ est la surface du triangle
Avec Δ1 x y1 x y1 x y
(4.4)
On peut écrire l’air du triangle sous la forme
∆12
Remplaçant l’équation (4.4) dans l’équation (4.3), on obtient

Chapitre 4 : Application à la méthode des éléments finis
47
∆
∆
∆
(4.5)
Remplacent dans l’équation (4.5) dans l’équation (4.2)
∅ ,2∆ 2∆ 2∆
D’où ∅ , , , , (4.6)
C’est une fonction d’interpolation (d’approximation)
On peut écrire sous une autre forme
∅ , , ,
Pour tout le domaine la fonction d’interpolation s’écrit :
∅ , ∑ , ∑ (4.7)
Avec , , et
Chapitre 4 : Application à la méthode des éléments finis
48
4.3.La méthode de Galerkine
4.3.1.Equation de l’éctroélastique :
Dans le cas bidimensionnel le système l’équation (2.17) s’écrit :
∅ 0 (4.8)
∅
0 4.9
∅ ∅ 0 (4.10)
En tenant compte de l’équation (2.10):
L’équation (4.8) s’écrit :
∅ ∅
∅ ∅ (4.11)
l’équation (4.9) s’écrit
Chapitre 4 : Application à la méthode des éléments finis
49
∅ ∅
∅ ∅ (4.12)
L’équation (4.10) s’écrit:
∅ ∅ ∅
∅ (4.13)
Pour simplifier l’écriture, on pose :
X→ , →
→ , →
L’équation (4.11):devient
∅ ∅ ∅
∅ 4.14
L’équation (4.12) devient
Chapitre 4 : Application à la méthode des éléments finis
50
∅ ∅ ∅ ∅
(4.15)
L’équation (4.13) devient
∅ ∅ ∅ ∅
(4.16)
L’équation (4.14) devient
∅ ∅ ∅ ∅
(4.17)
L’équation (4.15) devient
∅ ∅ ∅ ∅(4.18)
L’équation (4.16) devient
∅ ∅ ∅ ∅ (4.19)
Les trois équations précédentes deviennent
Chapitre 4 : Application à la méthode des éléments finis
51
L’équation (4.17) :
∅ ∅
∅ ∅ 4.20
L’équation (4.18) :
∅ ∅
∅ ∅ 4,21
L’équation (4.19) :
∅ ∅
∅ ∅ 4.22
4.3.2.Application de la méthode de GALERKINE
Ecrivant les équations élémentaires, en appliquant la méthode de GALERKINE, pour
un élément triangulaire de domaine ∆ à trois nœuds (i,j,k) chaque nœuds contient trois
degrés de libertés (U ,V, les équations (4.20) (4.21) (4.22) deviennent
L’équation (4.20) :
Chapitre 4 : Application à la méthode des éléments finis
52
∅ ∅ ∅
∅ (4.23)
L’équation (4.21):
∅ ∅ ∅
∅ 4.24
L’équation (4.22)
∅ ∅ ∅
∅ (4.25)
4.3.3. Application du théorème de GREEN
On posant Pour :
- l’équation (4.23) :
∅

Chapitre 4 : Application à la méthode des éléments finis
53
∅
∅
- L’équation (4.24):
∅
∅
∅
- L’équation (4.25):
∅
∅
∅
Les équations précédentes deviennent
Chapitre 4 : Application à la méthode des éléments finis
54
L’équation (4.23) :
∑ ∑
∑ ∑
∑
∅ ∅
∅ ∅ ∑
∅ ∅
∅ ∅ 4.26
- L’équation(4.24):
∑ ∑
∑ ∑
∑
∅ ∅
∅ ∅ ∑
∅ ∅
∅ ∅ 4.27
Chapitre 4 : Application à la méthode des éléments finis
55
- L’équation(4.25) :
∑ ∑
∑ ∑
∑
∅ ∅
∅ ∅ ∑
∅ ∅
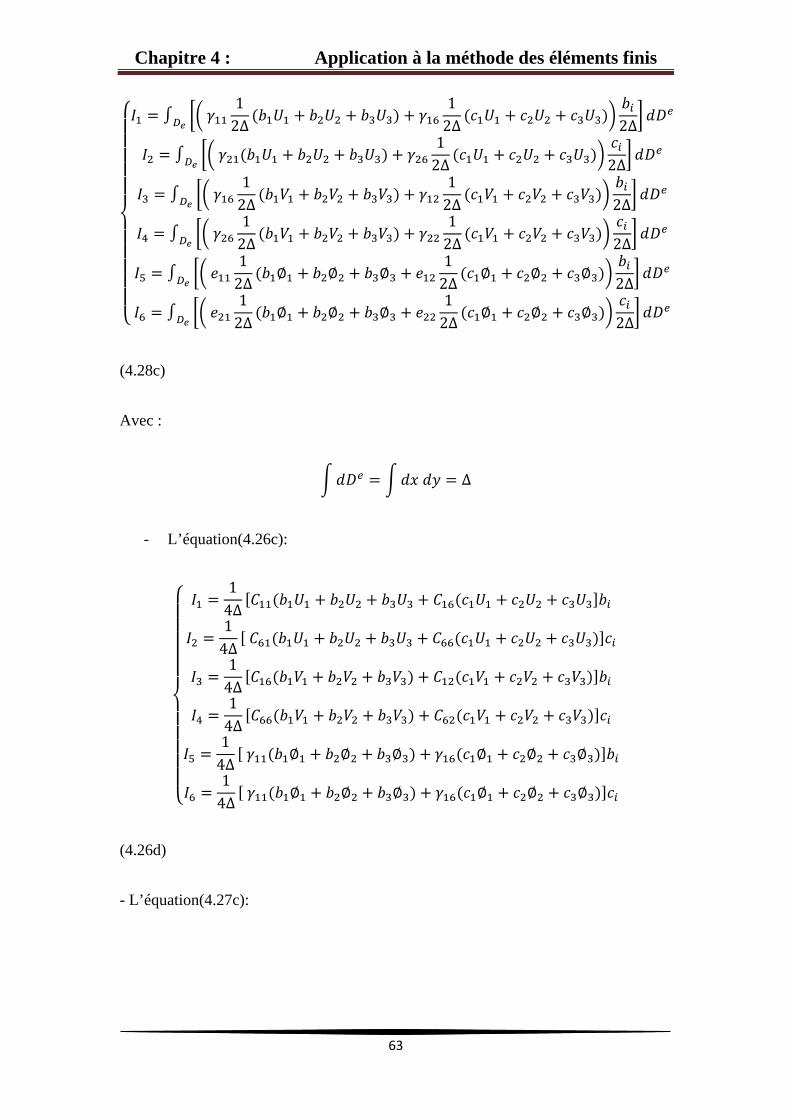
∅ ∅
4.28
2∆
2∆
2∆
2∆
2∆
2∆
Chapitre 4 : Application à la méthode des éléments finis
56
2∆ 2∆ 2∆
2∆
2∆ 2∆ 2∆
2∆
2∆ 2∆ 2∆
2∆
2∆ 2∆ 2∆
2∆
∅,
,∅ ∅ ∅ ∅

Chapitre 4 : Application à la méthode des éléments finis
57
∅,
2∆∅
2∆∅
2∆∅
∅,
∅ ∅ ∅2∆
∅,
,∅ ∅ ∅ ∅
∅,
2∆∅
2∆∅
2∆∅
∅,
∅ ∅ ∅2∆
12∆12∆
12∆12∆
∅,
12∆
∅ ∅ ∅
∅,
12∆
∅ ∅ ∅

Chapitre 4 : Application à la méthode des éléments finis
58
- L’équation(4.26) :
∅ ∅
∅ ∅
4.26
Le terme existe uniquement pour les éléments ayant des segments situes sur les frontières
Lim3 qui sont sollicités par des forces mécaniques
∑
∅ ∅
∅ ∅
∑
Le même raisonnement pour les deux autres équations
- L’équation(4.27) :
Chapitre 4 : Application à la méthode des éléments finis
59
∅ ∅
∅ ∅
4.27
∑
∅ ∅
∅ ∅
∑
- L’équation(4.28) :
∅ ∅
∅ ∅
4.28

Chapitre 4 : Application à la méthode des éléments finis
60
∑
∅ ∅
∅ ∅
∑
- L’équation(4.26a)
∅ ∅ ∅ ∅ ∅ ∅
∅ ∅ ∅ ∅ ∅ ∅
(4.26b)
- L’équation(4.27a):
Chapitre 4 : Application à la méthode des éléments finis
61
∅ ∅ ∅ ∅ ∅ ∅
∅ ∅ ∅ ∅ ∅ ∅
(4.27b)
- L’équation(4.28a):
∅ ∅ ∅ ∅ ∅ ∅
∅ ∅ ∅ ∅ ∅ ∅
(4.28b)
Avec :
2∆

Chapitre 4 : Application à la méthode des éléments finis
62
2∆
- L’équation(4.26b)
∆ ∆ ∆
∆ ∆ ∆
∆ ∆ ∆
∆ ∆ ∆
∆
∅ ∅ ∅∆
∅ ∅ ∅∆
∆
∅ ∅ ∅∆
∅ ∅ ∅∆
(4.26c)
- L’équation(4.27b):
12∆
12∆ 2∆
12∆
12∆ 2∆
12∆
12∆ 2∆
12∆
12∆ 2∆
12∆
∅ ∅ ∅12∆
∅ ∅ ∅2∆
12∆
∅ ∅ ∅12∆
∅ ∅ ∅2∆
(4.27c)
- L’équation(4.28b):
Chapitre 4 : Application à la méthode des éléments finis
63
12∆
12∆ 2∆
12∆ 2∆
12∆
12∆ 2∆
12∆
12∆ 2∆
12∆
∅ ∅ ∅12∆
∅ ∅ ∅2∆
12∆
∅ ∅ ∅12∆
∅ ∅ ∅2∆
(4.28c)
Avec :
∆
- L’équation(4.26c):
14∆14∆
14∆14∆14∆
∅ ∅ ∅ ∅ ∅ ∅
14∆
∅ ∅ ∅ ∅ ∅ ∅
(4.26d)
- L’équation(4.27c):
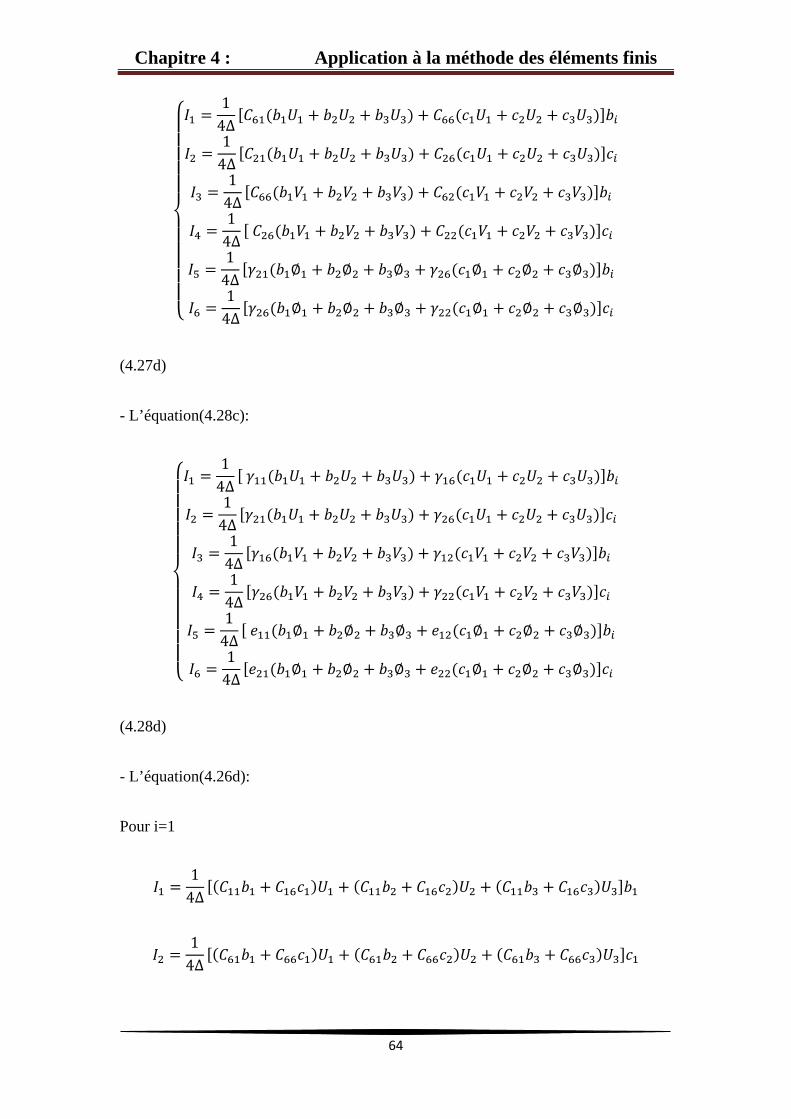
Chapitre 4 : Application à la méthode des éléments finis
64
14∆14∆14∆14∆
14∆
∅ ∅ ∅ ∅ ∅ ∅
14∆
∅ ∅ ∅ ∅ ∅ ∅
(4.27d)
- L’équation(4.28c):
14∆
14∆14∆14∆14∆
∅ ∅ ∅ ∅ ∅ ∅
14∆
∅ ∅ ∅ ∅ ∅ ∅
(4.28d)
- L’équation(4.26d):
Pour i=1
14∆
14∆
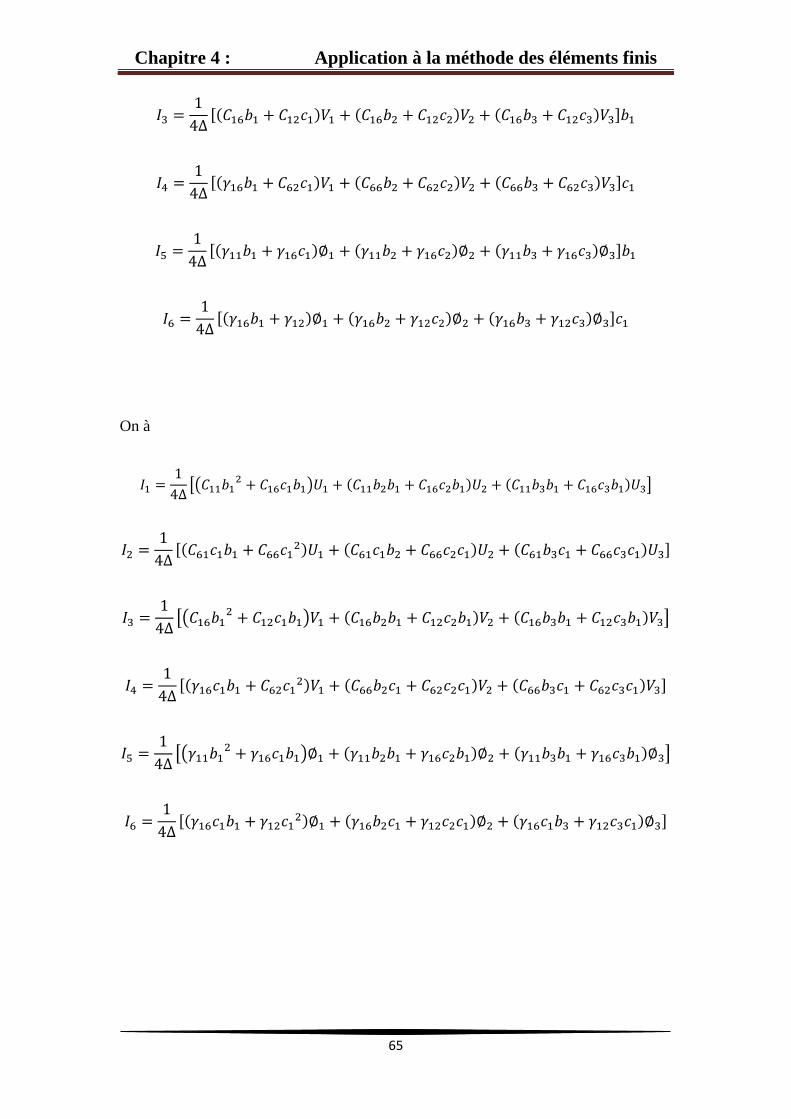
Chapitre 4 : Application à la méthode des éléments finis
65
14∆
14∆
14∆
∅ ∅ ∅
14∆
∅ ∅ ∅
On à
14∆
14∆
14∆
14∆
14∆
∅ ∅ ∅
14∆
∅ ∅ ∅
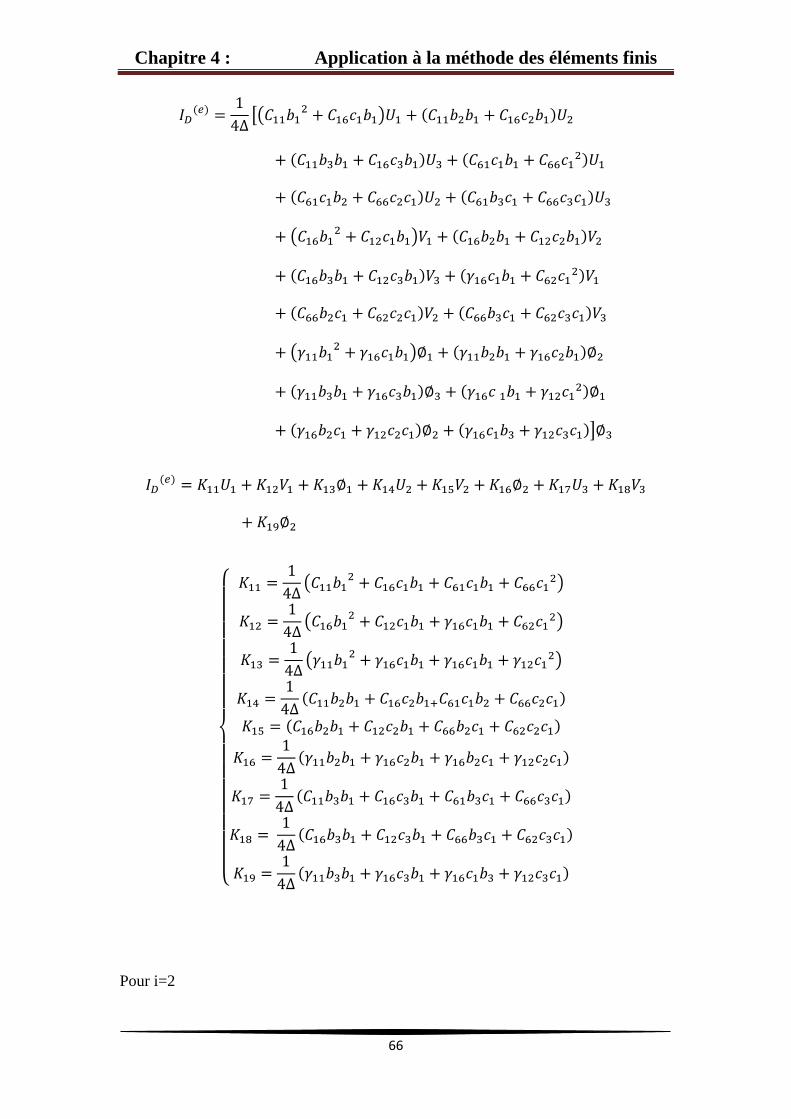
Chapitre 4 : Application à la méthode des éléments finis
66
14∆
∅ ∅
∅ ∅
∅ ∅
∅ ∅
∅
14∆14∆14∆14∆
14∆14∆
14∆14∆
Pour i=2
Chapitre 4 : Application à la méthode des éléments finis
67
14∆
14∆
14∆
14∆
14∆
∅ ∅ ∅
14∆
∅ ∅ ∅
On à
14∆
14∆
14∆
14∆
14∆
∅ ∅ ∅
14∆
∅ ∅ ∅

Chapitre 4 : Application à la méthode des éléments finis
68
14∆
∅ ∅
∅ ∅
∅ ∅
∅ ∅
∅
∆
∆
∆
∆
∆
∆
∆
∆
∆
Pour i=3
14∆
Chapitre 4 : Application à la méthode des éléments finis
69
14∆
14∆
14∆
14∆
∅ ∅ ∅
14∆
∅ ∅ ∅
On à
14∆
14∆
14∆
14∆
14∆
∅ ∅ ∅
14∆
∅ ∅ ∅
Chapitre 4 : Application à la méthode des éléments finis
70
14∆
∅ ∅
∅ ∅
∅ ∅
∅ ∅
∅
14∆14∆14∆14∆
14∆14∆14∆
14∆
14∆
Chapitre 4 : Application à la méthode des éléments finis
71
La matrice de rigidité élémentaire de l’équation 1
Avec :
∆
∆
∆
∆
∆
∆
∆
∆
14∆
14∆
14∆14∆
14∆
14∆
14∆
14∆14∆
Chapitre 4 : Application à la méthode des éléments finis
72
∆
∆
∆
∆
∆
∆
∆
∆
∆
- L’équation(4.27d):
Pour i=1
14Δ
14Δ
14Δ
14Δ
14Δ
On à
14Δ

Chapitre 4 : Application à la méthode des éléments finis
73
14Δ
14Δ
14Δ
14Δ
14Δ
14∆
Donc
Chapitre 4 : Application à la méthode des éléments finis
74
14Δ
14Δ
14Δ
14Δ14Δ14Δ14Δ14Δ14Δ
Pour i=2
14Δ
14Δ
14Δ
14Δ
14Δ
Chapitre 4 : Application à la méthode des éléments finis
75
14Δ
14Δ
14Δ
14Δ
14Δ
14Δ
14Δ
Donc
Chapitre 4 : Application à la méthode des éléments finis
76
14Δ14Δ14Δ
14Δ
14Δ
14Δ
14Δ14Δ14Δ
Pour i=3
14Δ
14Δ
14Δ
14Δ
14Δ
Chapitre 4 : Application à la méthode des éléments finis
77
14Δ
14Δ
14Δ
14Δ
14Δ
14Δ
14Δ
Donc
Chapitre 4 : Application à la méthode des éléments finis
78
14Δ14Δ14Δ14Δ14Δ14Δ14Δ
14Δ
14Δ
La matrice de rigidité élémentaire de l’équation 2 :
Avec :
14Δ
14Δ
14Δ
14Δ
Chapitre 4 : Application à la méthode des éléments finis
79
14Δ
14Δ
14Δ
14Δ
14Δ
14Δ14Δ14Δ14Δ
14Δ
14Δ
14Δ14Δ14Δ
14Δ
14Δ
14Δ
14Δ
14Δ
14Δ
Chapitre 4 : Application à la méthode des éléments finis
80
14Δ
14Δ
14Δ
- L’équation(4.28d):
Pour i=1
14∆
14∆
14∆
14∆
14∆
∅ ∅ ∅
14∆
∅ ∅ ∅
On à
14∆
14∆
14∆

Chapitre 4 : Application à la méthode des éléments finis
81
14∆
14∆
∅ ∅ ∅
14∆
∅ ∅ ∅
14∆
∅ ∅
∅ ∅
∅ ∅
∅ ∅
∅
Chapitre 4 : Application à la méthode des éléments finis
82
14∆14∆14∆14∆
14∆14∆14∆
14∆14∆
Pour i=2
14∆
14∆
14∆
14∆
14∆
∅ ∅ ∅
14∆
∅ ∅ ∅
On à
14∆

Chapitre 4 : Application à la méthode des éléments finis
83
14∆
14∆
14∆
14∆
∅ ∅ ∅
14∆
∅ ∅ ∅
14∆
∅ ∅
∅ ∅
∅ ∅
∅ ∅
∅

Chapitre 4 : Application à la méthode des éléments finis
84
14∆14∆14∆14∆
14∆14∆14∆
14∆14∆
Pour i=3
14∆
14∆
14∆
14∆
14∆
∅ ∅ ∅ ∅ ∅ ∅
14∆
∅ ∅ ∅ ∅ ∅ ∅
Chapitre 4 : Application à la méthode des éléments finis
85
14∆
14∆
14∆
14∆
14∆
∅ ∅ ∅
14∆
∅ ∅ ∅
14∆
∅ ∅
∅ ∅
∅ ∅
∅ ∅
∅
Chapitre 4 : Application à la méthode des éléments finis
86
14∆14∆14∆14∆
14∆14∆14∆
14∆14∆
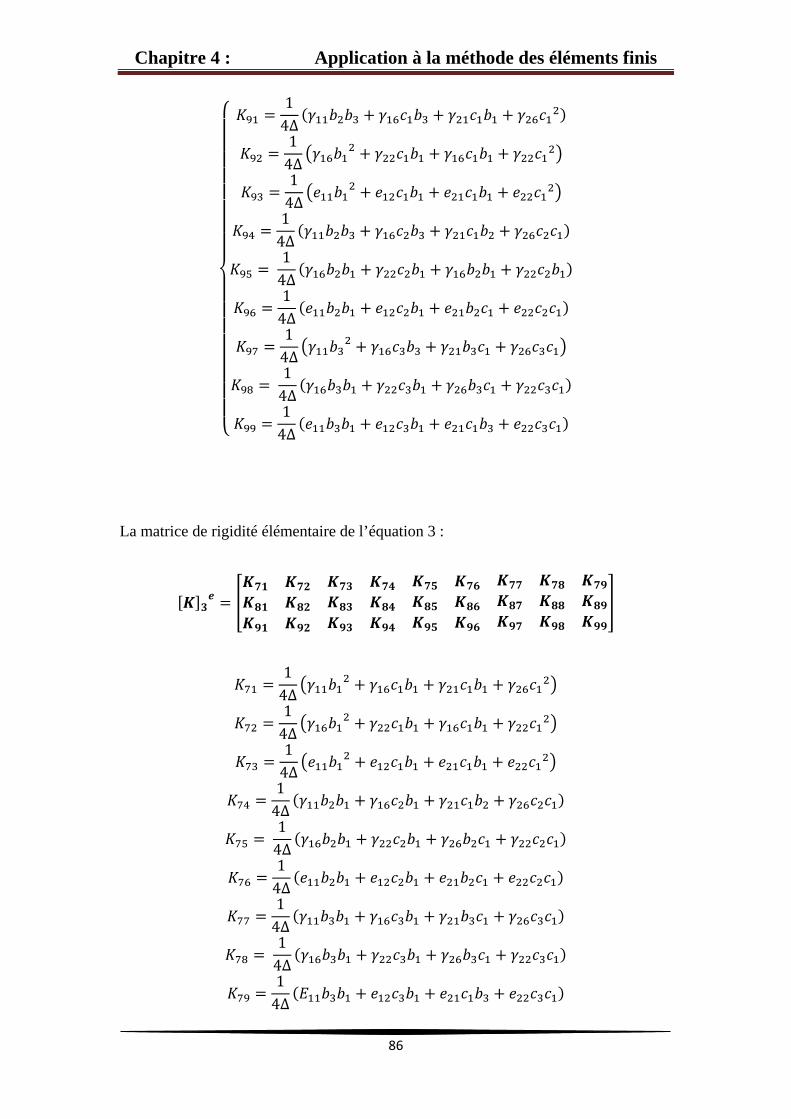
La matrice de rigidité élémentaire de l’équation 3 :
14∆14∆14∆14∆
14∆14∆14∆
14∆14∆

Chapitre 4 : Application à la méthode des éléments finis
87
14∆14∆14∆14∆
14∆14∆14∆
14∆14∆
14∆14∆14∆
14∆
14∆14∆14∆
14∆14∆
Le terme qui se trouve sur la frontière ln3
1,2,3

Chapitre 4 : Application à la méthode des éléments finis
88
En fin on un système d’équation a 9 inconnus
: Vecteur de force mécanique
: Vecteur de déplacement
Puisque la force de surface T appliquée sur ln3 est constante on remplace la fonction par
une fonction équivalente d’une variable de longueur S
1
Donc s’écrit
1 2
1,2,3
Conclusion Générale
89
Conclusion Générale
L’effet piézoélectrique est un phénomène récent. qui demande des connaissances
en programmation et les méthodes de résolution numériques. Vus les problèmes
rencontrés (la complexité du phénomène , temps …),nous avons limité le travail juste
à la détermination de la matrice de rigidité. Au début, notre but est de déterminer le
champ de déplacement (U,V) et du potentiel électrique (φ) créé sur les surfaces
métallisées de la plaque.
Pour cette raison une étude analytique et faite pour décrire le comportement de ce
phénomène. Des simplifications ont été prises en compte, nous avons abouti à un
système couplé d’équations différentielles aux dérivées partielles, l’étude est faite
dans le cas bidimensionnel.
La discrétisation du système trouvé fait appel à la méthode des éléments finis qui est
utilisée pour intégrer les équations du système couplé, en appliquant l’approche de
GALERKINE .pour rendre les équations sous forme variationnelle. Cette approche
nous la possibilité de trouver la matrice de rigidité K. vu le temps on n’a pas pu
trouver les résultats qui exigent des connaissances en programmation (FORTRAN)
malgré le programme de base qu’on a. et qui traite le coté thermique. on a essayé de
faire un organigramme qui résume la démarche de notre travail (voir annexe 4).
Bibliographie
90
BIBLIOGRAPHIE
[1] https://tel.archives-ouvertes.fr/tel-00004849Submitted on 18 Feb 2004
Modélisation asymptotique de plaques : contrôlabilité exacte frontière,
piézoélectricité
Abdou Séne
[2] Edieulesaint et D.Royer « Ondes élastiques dans les solides applications aux
Traitement du signal » MASSON 1974
[3] http://www2.ac.lyon. fr/etab /lycees/lys-69/descaters/IMG/pdf/poirel-2=piezo pdf.
l’effet piézo-électrique
[4] strasboortr.udppca.asso.fr/odpf/possies/olympiades٪20piézolecticité-mescico.
Grossir : un chemin pour la durabilité
[5] www.applis.unio.theses/2012/natihieu.domenjoud-3845
Caractérisation des propriétés électroacoustiques de structures piézoélectriques
soumises à une contrainte statique de type électrique ou mécanique
[6] www.edu.upmc.fr/physique/phys325/Documents
Résoudre Maxewell.pdf
[7] Mémoire de Calcul du champ de température sur une plaque par la méthode des
éléments finis (promotion 2005).
[8] http://www.math.unicaen-fr/ ̴ choi/pdf/cour-mef-pdf
Méthode des éléments finis par exemple.
[9] M.boumahrat/A.Goundin(Méthodes numériques appliquée Edition 1983)
[10] http://meefi.pedagogie.ec-nantes.fr/mef/MIAS/projets/logiciel/util-logiciel.pdf
Utilisation d’un logiciel éléments finis
ANNEXES

Annexes
ANNEXES
Annexe 1
Le tenseur des constantes élastique, tenseur des constantes diélectrique et tenseur des
constantes piézoélectrique des différents systèmes se regroupement en un seul tenseur
symétrique dont la forme.[2]
Système hexagonal :
La symétrie de la céramique (PZT.4) réduit le nombre de constante à 10
0 0 00 0 00 0 0
0 0 0 0 0 0
0 0 00 0 00 0 0
0 00 00 0
0 00 0
0 0 00 0 00 0 0
0 00 0
0 0 0
0 00 00 0
2
Système trigonal :
NIOBATE de LITHIUM (linbo3) réduit le nombre de constante indépendante à 12
0 0 0 0 0 0 0
0 0 00 0 00 0 0
0 0 00 0 0
0
0 00 00 0
0 0 00 0 00 0 0
0 0 00 0 00 0 0
0 0 00 0 00 0 0
0 0 00 0 00 0 0
Annexes
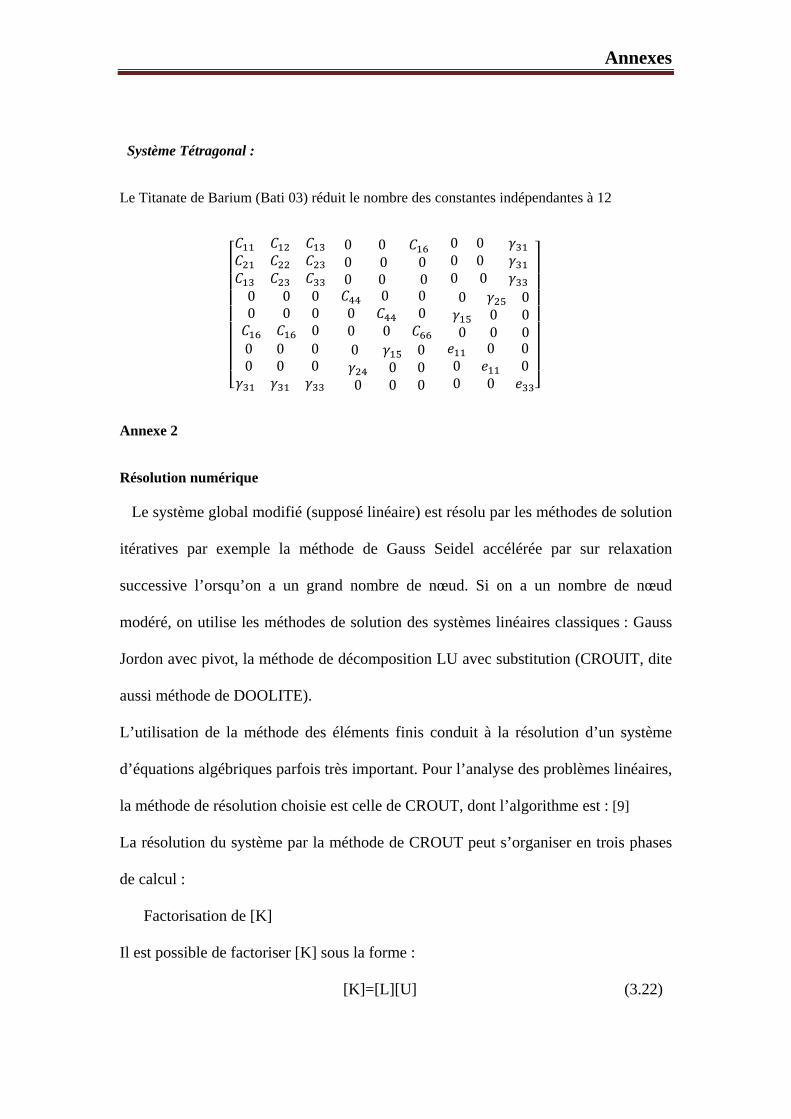
Système Tétragonal :
Le Titanate de Barium (Bati 03) réduit le nombre des constantes indépendantes à 12
0 0 0 0 00 0 0
0 0 0 0 0 0
0 0 00 0 0
0
0 00 00 0
0 00 0
0 0 00 0 00 0 0
0 00 0
0 0 0
0 00 00 0
Annexe 2
Résolution numérique
Le système global modifié (supposé linéaire) est résolu par les méthodes de solution
itératives par exemple la méthode de Gauss Seidel accélérée par sur relaxation
successive l’orsqu’on a un grand nombre de nœud. Si on a un nombre de nœud
modéré, on utilise les méthodes de solution des systèmes linéaires classiques : Gauss
Jordon avec pivot, la méthode de décomposition LU avec substitution (CROUIT, dite
aussi méthode de DOOLITE).
L’utilisation de la méthode des éléments finis conduit à la résolution d’un système
d’équations algébriques parfois très important. Pour l’analyse des problèmes linéaires,
la méthode de résolution choisie est celle de CROUT, dont l’algorithme est : [9]
La résolution du système par la méthode de CROUT peut s’organiser en trois phases
de calcul :
Factorisation de [K]
Il est possible de factoriser [K] sous la forme :
[K]=[L][U] (3.22)
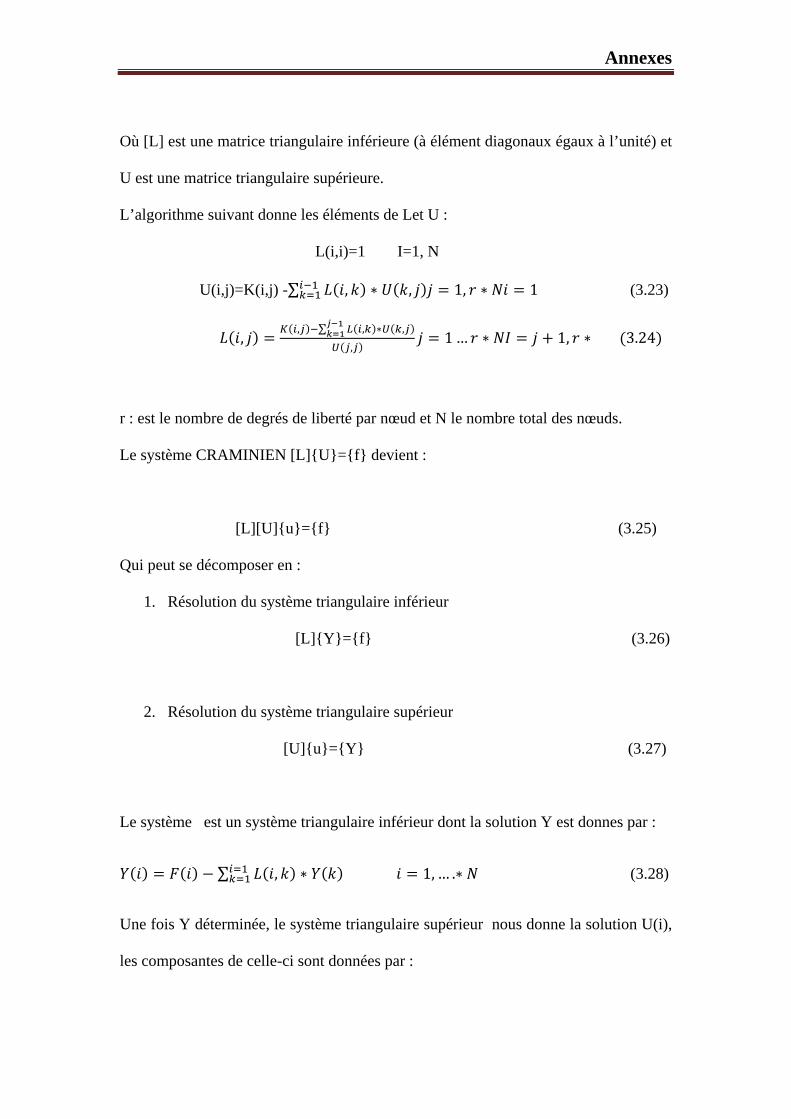
Annexes
Où [L] est une matrice triangulaire inférieure (à élément diagonaux égaux à l’unité) et
U est une matrice triangulaire supérieure.
L’algorithme suivant donne les éléments de Let U :
L(i,i)=1 I=1, N
U(i,j)=K(i,j) -∑ , ∗ , 1, ∗ 1 (3.23)
,, ∑ , ∗ ,
,1… ∗ 1, ∗ 3.24
r : est le nombre de degrés de liberté par nœud et N le nombre total des nœuds.
Le système CRAMINIEN [L]{U}={f} devient :
[L][U]{u}={f} (3.25)
Qui peut se décomposer en :
1. Résolution du système triangulaire inférieur
[L]{Y}={f} (3.26)
2. Résolution du système triangulaire supérieur
[U]{u}={Y} (3.27)
Le système est un système triangulaire inférieur dont la solution Y est donnes par :
∑ , ∗ 1, … .∗ (3.28)
Une fois Y déterminée, le système triangulaire supérieur nous donne la solution U(i),
les composantes de celle-ci sont données par :
Annexes
,∑ , ∗
,
1, …… . .1
Annexe 3
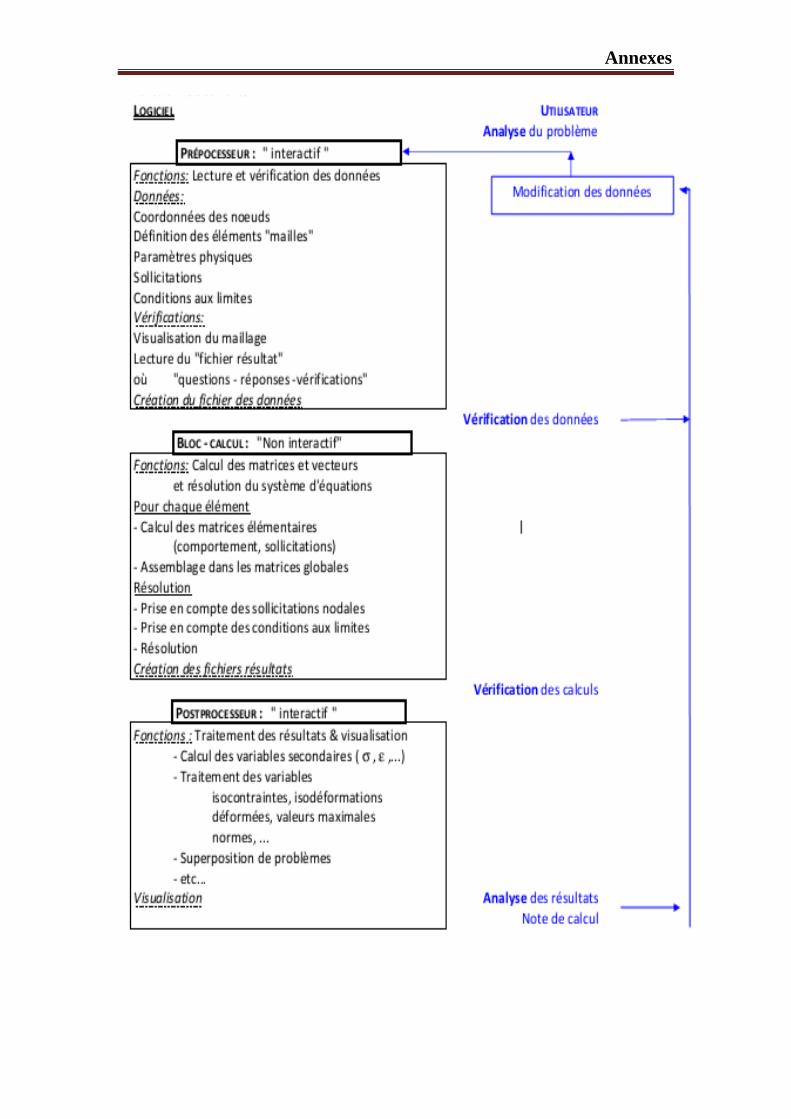
Organigramme d'un logiciel éléments finis
Tout logiciel de calcul par la méthode des éléments finis contient les étapes
caractéristiques ou blocs fonctionnels suivants:[10]
Annexes
Annexes
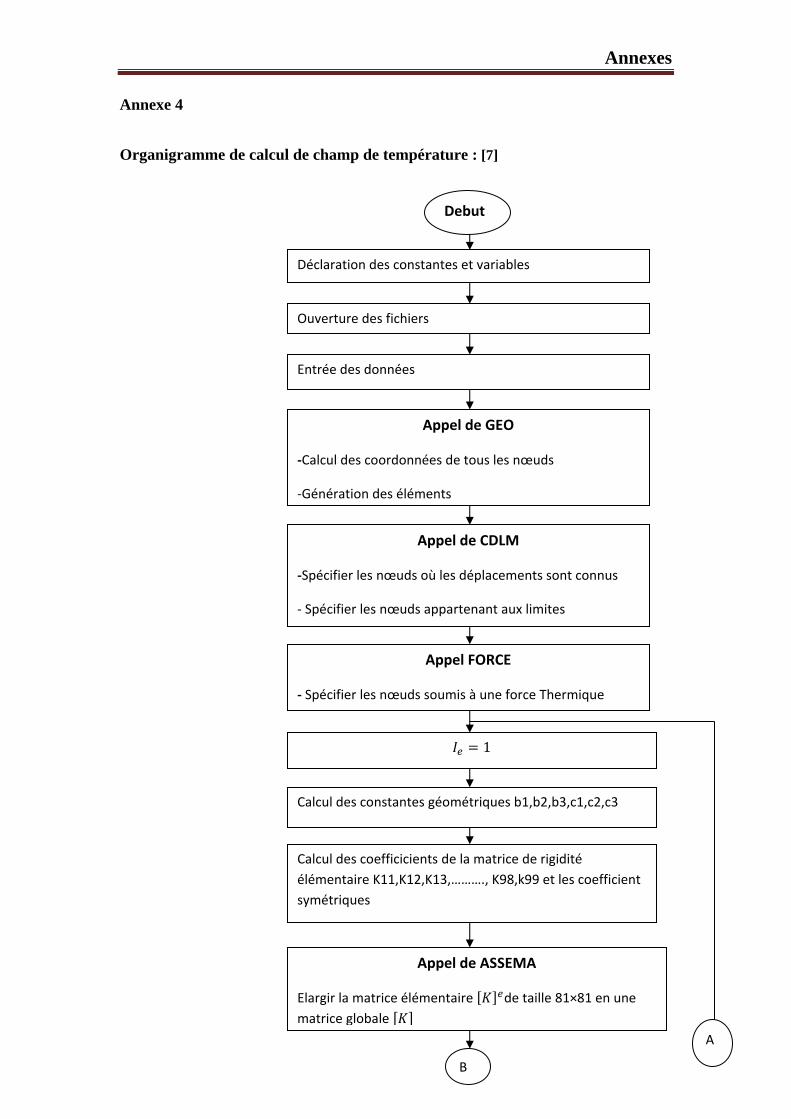
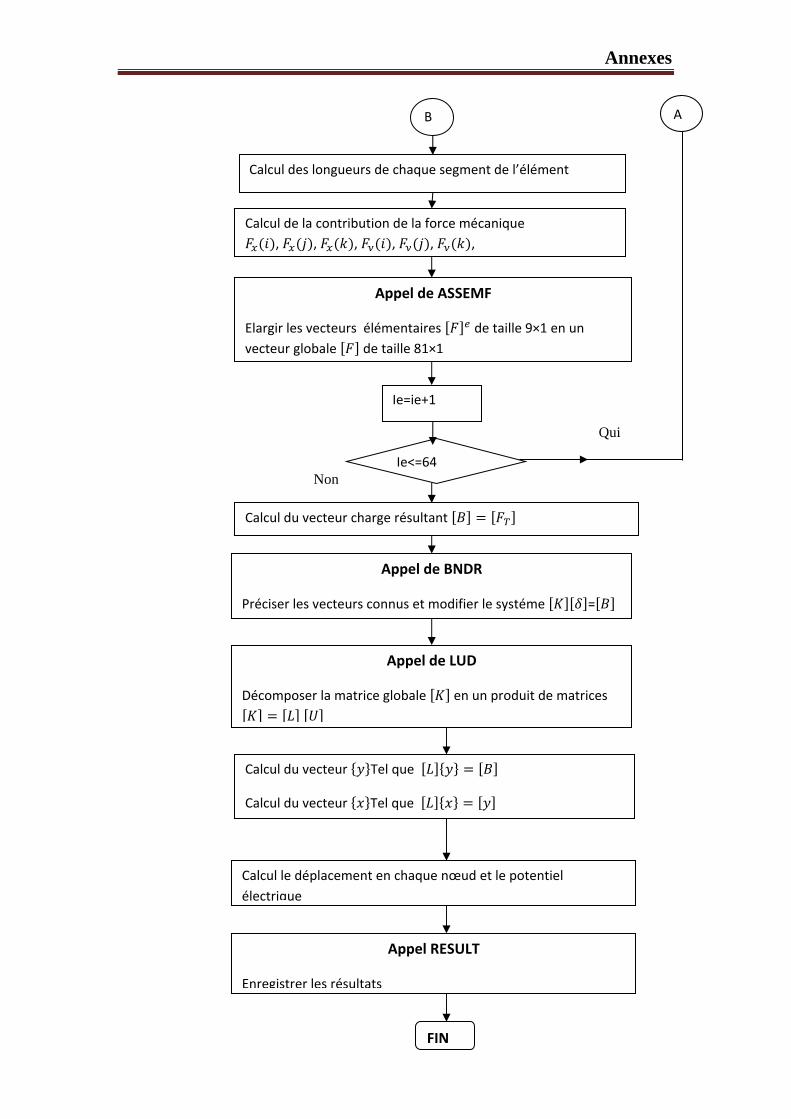
Annexe 4
Organigramme de calcul de champ de température : [7]
Déclaration des constantes et variables
Debut
Ouverture des fichiers
Entrée des données
Appel de GEO
‐Calcul des coordonnées de tous les nœuds
‐Génération des éléments
Appel de CDLM
‐Spécifier les nœuds où les déplacements sont connus
‐ Spécifier les nœuds appartenant aux limites
Appel FORCE
‐ Spécifier les nœuds soumis à une force Thermique
1
Calcul des constantes géométriques b1,b2,b3,c1,c2,c3
Calcul des coefficicients de la matrice de rigidité
élémentaire K11,K12,K13,………., K98,k99 et les coefficient
symétriques
A
B
Appel de ASSEMA
Elargir la matrice élémentaire de taille 81×81 en une
matrice globale
Annexes
Qui
Non
B
Calcul des longueurs de chaque segment de l’élément
Calcul de la contribution de la force mécanique
, , , , , ,
Appel de ASSEMF
Elargir les vecteurs élémentaires de taille 9×1 en un
vecteur globale de taille 81×1
Ie=ie+1
Ie˂=64
Calcul du vecteur charge résultant
Appel de BNDR
Préciser les vecteurs connus et modifier le systéme =
Appel de LUD
Décomposer la matrice globale en un produit de matrices
Calcul du vecteur Tel que
Calcul du vecteur Tel que
Calcul le déplacement en chaque nœud et le potentiel
électrique
Appel RESULT
Enregistrer les résultats
FIN
A





























