Embed Size (px)
Citation preview

8/3/2019 delta sabancı
http://slidepdf.com/reader/full/delta-sabanci 1/6
Yüksek Hassasiyetli Montaj lemleri
çin Minyatür Delta Robot Tasarımı, En yilemesi ve Denetimi
Emrah D. Kunt 1, Islam S. M. Khalil 2 , Ahmet T. Naskali3 , Kaan C. Fidan4 , Asif Sabanovic5
1,2,3,4,5Mekatronik MühendisliiSabancı Üniversitesi, stanbul
{edkunt,kahalil,teoman,kaancfidan,asif}@sabanciuniv.edu
Özetçe
Bu makalede yüksek hassasiyetli montaj uygulamaları içinminyatür delta robot tasarımı, en iyilemesi ve denetimisunulmaktadır. Bu delta robot modüler bir mikro fabrika
kavramının bir parçası olup esas olarak hızlı ve hassas al-bırak ilemlerini gerçekletirecek bir manipülatör olarak kullanılacaktır. Robotun önceden belirlenmi 40 mm3 kübik ekilli bir çalıma uzayı için gerekli olan kinematik
parametrelerin elde edilmesi için kinematik analizgerçekletirilmitir. En iyileme sürecinden elde edilen
parametreler kullanılarak tasarım süreci gerçekletirilmi verobot üretilmitir. Tasarlanan gerekli elektronik aksam ile vedenetim algoritmasıyla tasarım testleri gerçekletirimi veümit verici sonuçlar elde edilmitir. Tasarımın iyiletirilmesineyönelik yapılacak çalımalar belirtilmi ve yeni bir tasarımüzerinde çalıılmaya balanmıtır.
1. Giri
Üretim sistemlerinin minyatürletirilmesi kavramı, sistemlerin bütün olarak ve geleneksel makro ölçütteki sistemlerdekullanılan bileenlerin minyatürletirilmesi ya da yeniteknolojilerle yer deitirmesi gereksinimi dourmaktadır.Fakat minyatürletirme süreci birçok sorun ihtiva etmektedir nitekim sürecin her safhasında yüksek doruluk seviyelerineulaabilmek için yüksek hassasiyet gerekmektedir. Cihazlardagereken hassasiyet ve doruluk seviyelerine ulamagereksinimi mekanik ve üretim toleranslarının büyük önemkazanmasına yol açmaktadır. Bu nedenle bütün tasarım veüretim süreci dikkatlice deerlendirilmeli vegerçekletirilmelidir.Küçük çapta bir mekanizmayı oluturmak için gerekli olan
bütün bileenler henüz hazır olarak pazarda bulunmamaktadır.Bu nedenle bu bileenlerin yerine geçecek özel yapımçözümler gerçekletirilmelidir ki bu da minyatür cihazların
tasarımında önemli bir sorun olarak yer almaktadır.Küçük boyutlar, üretim düzenlenmesinde ölçeklendirebilirlik ve esneklik salayan modüler sistem tasarımını mümkünkılmaktadır. Küçük yapı ölçüleri, boyut uyarlamalı cihazlarınilem esnasındaki termal genilemenin yol açtıı sistematik hatalara kar ı daha gürbüz olmasını salamakta veölçeklendirme etkileri bu cihazların dinamiklerini daha iyikılmaktadır.Boyut uyarlamalı hassas robotların gelitirilmesine yönelik stratejiler mobil mikro robotlardan ürün odaklı montaj
hücrelerinde ve mikro fabrika kavramları dahilinde kullanılanminyatür hassas robotlara kadar çeitlilik göstermektedir.Minyatür hassas robotlar mekanik olarak iyi bilinen kinematik yapılara sahip alıılmı robotların minyatür versiyonları olarak kabul edilebilir. Bu minyatür manipülatörler mikro fabrikakavramı içerisinde üretim hatlarında montaj süreçlerineuygulanması gereken boyut uyarlamalı üretim sistemlerinin
bileenleridir. Minyatürletirme yönünde son zamanlardakigelimeler ve bu gelimeler sonucunda piyasada artık eriilebilir olan sıfır boluklu dililer ve artımlı kodlayıcı(enkoder) entegre edilmi yüksek dinamikli mikro motorlar gibi bileenler sayesinde endüstriyel robotlarınminyatürletirilmesi mümkün hale gelmitir. Buölçeklendirilebilir minyatür yapılar indirgenmi dinamik kütleleri sonucunda gelimi dinamik özelliklere ve süreçhızlarına imkan vermektedir. Buna ek olarak bu yapılar kanıtlanmı denetim teknolojilerinin kullanılmasına ve piezoeyleyiciler gibi alternatif eyleyici teknolojilerininkarmaıklıından da kaçınılmasına olanak salamaktadır.Geçtiimiz yıllarda paralel robotlara kar ı büyük bir ilgiolumutur ve bunun nedeni paralel yapıların seri yapılara
kar ı yüksek bükülmezlik, yüksek doruluk ve yüksek yük-aırlık oranı gibi avantajlara sahip olmalarıdır. Sonzamanlarda minyatürletirme akımının artarak ilerlemesiyüksek hassasiyette ve dorulukta manipülatörlere gereksinimduyulmasına yol açmıtır. Bu nedenle farklı hareketserbestliklerine sahip çeitli paralel mekanizmalar gerçekletirilmitir. Paralel robotların en önemli dezavantajıkısıtlı çalıma uzaylarıdır. Fakat küçük boyutta parçalarınhassas bir ekilde manipülasyonu söz konusu olduunda buönemli bir sorun olmaktan çıkmaktadır nitekim küçük boyutta
bir çalıma uzayı bu tür uygulamalarda yeterli olmaktadır.Paralel robotların mikro montaj, mikro enjeksiyon gibi yüksek hassasiyet gerektiren uygulamalardaki avantajlarıdüünüldüünde, bu robotların minyatürletirilmelerine ve buuygulamalar için özel olarak tasarlanan sistemlere kolaycatümletirilebilmesi için önemli bir çaba sarf edilmektedir.
Stewart platformu [1], aslen bir uçu benzeticisi olarak tasarlanmıtır. Daha sonraları bu yapı üzerinde çok geni çaplıçalımalar gerçekletirilmi ve günümüzde çok yaygın bir ekilde kullanılmakta ve de piyasada çok farklı boyutlarda
bulunmaktadır. Yine yüksek hassasiyet gerektirenuygulamalarda kullanılmak üzere 4 hareket serbestlik derecesine sahip küçük ölçekli hibrit mikro scara robot [2] ve[3]’te sunulmutur. Clavel tarafından 3 eksenli bütünüyle
paralel mehur Delta robotun sunulmasıyla kısıtlı çalıma
ÇaA2-2 252

8/3/2019 delta sabancı
http://slidepdf.com/reader/full/delta-sabanci 2/6
uzayı problemi biraz da olsa çözümlenmitir [4]. N hareketserbestlik derecesine sahip bütünüyle paralel bir robot, uçtakımının tabana n sayıda en fazla iki balantı kolu içeren ve
prizmatik ya da dönel eyleyici tarafından tahrik edilen baımsız bir zincirle balı olduu kapalı döngü bir mekanizmadır [5]. CSEM tarafından gelitirilen Delta robotunminyatür versiyonunun montaj ilemleri gerçekletirmek için
bir mikro fabrika hücresi içine bütünletirilmesi [6]’da
açıklanmıtır. Yine 4 hareket serbestlik derecesine sahip Scararobot benzeri bir robot EPFL tarafından gelitirilmi ve [7]’desunulduu üzere montaj ve taıma ilemlerigerçekletirmektedir.Bu makalede, yüksek hassasiyetli montaj ilemleri için mikrofabrika kavramı dahilinde kullanılacak olan minyatür bir deltarobotun tasarımı, en iyilemesi ve denetimi sunulmaktadır.Bölüm 2’de delta robot mekanizmasının kinematii hakkındagenel bilgi verilmekte ve kullanılan analitik ileri ve gerikinematik denklemleri için benzetim sonuçları sunulmaktadır.Bölüm 3’te tasarım en iyilemesinde kullanılan teknik ve
belirlenen bir çalıma uzayı için delta robotun ölçüsel analizianlatılmaktadır. Bölüm 4’te gerçekletirilen deneyler vesonuçları sunulmakta ve son bölümde sonuçlar ve gelecek çalımalar belirtilmektedir.
2. Delta RobotDelta robot, ekil 1’de gösterildii gibi, taban kısmına her biritaban ünitesine sabitlenmi dönel motorlar tarafındantahriklenen birbirinin aynı 3 adet paralel kinematik zincirle
balanmı hareketli uç kısımdan olumaktadır. Her bir zincir dönel bir motor tarafından tahriklenen bir üst kol ve her biri
balantı kolları ve küresel eklemlerden oluan paralelkenar eklindeki alt koldan olumaktadır. Hareket, uç kısımatahriklenen üst kollar ile alt kollar üzerinden aktarılmaktadır.Alt kolların paralelkenar yapısı hareketli uç kısmın sabit tabankısmına paralel olarak hareket etmesini garantilemektedir.
ekil 1: Kinematik Model [4]
Kinematik hesaplarda kullanılan önemli deikenlerinaçıklamaları Tablo 1’de verilmitir.leri ve ters kinematikler için Clavel [4] tarafından önerilenanalitik metod kullanılmı ve denklemleri test etmek amacıylaMatlab’da benzetimler gerçekletirilmitir. Hem ileri
kinematik hem de ters kinematik benzetimleri tutarlı sonuçlar vermitir.
Tablo 1 – Delta Robot Kinematik Deikenleri
R A Taban merkezi ile eyleyici dönme ekseni arasındakimesafe.
R B “Beik” (hareketli uç kısım) merkezi ile alt küreseleksenler dönme ekseni arasındaki mesafe.
LA Üst balantı kolu uzunluu (aktif balantı)LB Alt balantı kolu uzunluu (pasif balantı)i Üst kol ile taban düzlemi arasındaki açı. (Tabanın
yatay olduu düünülürse kabul görüldüü üzere kol bu yatay düzlemin altında bulunduundan i açısınegatiftir.)
i Paralelkenar düzlemi ile taban düzlemi arasındaki açıi ekil 1’de gösterilen dikey düzlem ile paralelkenarın
bir çubuu arasındaki açı.i Seçilen taban x eksenine göre her bir kol grubunun
açısal pozisyonu.
Matlab ortamında denklemlerin oluturulmasından sonrasonuçlar 3 Boyutlu Cosmos ortamındaki sonuçlarlakar ılatırılmıtır. Bu sayede, analiz sonuçları kar ılatırılarak
sonuçların güvenilirlii dorulanmıtır.15 saniyelik bir sistem kordinat girdisi için, Cosmos ekil2’deki sonuçları vermektedir. ekilde üst kolların referansdüzlemi ile yaptıı açıların zamana göre deiimigösterilmitir. Cosmos verileri Matlab’da ilenirken aynıkordinat girdileri için Simulink ortamında da benzetimgerçekletirilmi ve aaıdaki ekiller elde edilmitir. Solsütun Cosmos sonuçlarını sa sütün ise analitik çözümsonuçlarını göstermektedir. ekillerden de görülecei üzeresonuçlar çok benzerdir ve aradaki hata 10e-4 civarlarındadır ki
bu da denklemlerin güvenilir sonuçlar verdiinigöstermektedir.
ekil 2 : Sonuçların Kar ılatırılması
Delta robotun ana tasarım yapısı ileri ve ters kinematiklerinin benzetim ortamında gerçekletirilmesi ile oluturulmutur.Kinematiin 3 boyutlu ortamda test edilmesi sistem hareketdavranılarını gösterdii için tasarım gereksinimlerinin dedaha iyi anlaılmasını salamıtır. Bu noktada gerçekletirilenkaba tasarımdan sonra önceden belirlenmi bir çalıma uzayı
253
8/3/2019 delta sabancı
http://slidepdf.com/reader/full/delta-sabanci 3/6
için en iyileme gerçekletirilerek kol uzunlukları ve dier önemli kinematik parametreler belirlenmi ve sonraki bölümdeaçıklanmıtır.
3. En yileme
Önceden tanımlanmı kübik 40 mm3 çalıma uzayına sahipminyatür delta robot tasarımı için, kinematik tasarımdeikenlerini elde etmek amacıyla gerçekletirilen en iyilemeteknii [8]’de açıklanmıtır. Belirlenmi bir çalıma uzayı içindelta robot boyutsal sentez metodu verilmi ve tanımlananamaç fonksiyonu bir noktanın üssü o noktanın çalımauzayının sınır koullarına göre konumunu yansıtmaktadır kavramına dayanmaktadır. Ve bu problemin çözümü içingenetik algoritma tabanlı bir metod kullanılmıtır. Ön
belirlemede kullanılan çalı ma uzayı küp olarak seçilmitir. Eniyileme sonucunda elde edilen çalıma uzayında bazı köeler çalıma uzayının sınırlarında kalabilmektedir.Belirlenmi bir çalıma uzayı için, kol uzunlukları ve tabanınuç kısıma göre büyüklüü delta robot için en önemli üçtasarım parametresini oluturmaktadır. Burda “taban” robotunüç kolunun oluturduu uç kısmın (beik) aksine sabit olanüçgen kısmı temsil etmektedir. Bu parametreler aslolarak deltarobotun çalıma uzayını belirlemektedir. Robotun ölçütsel
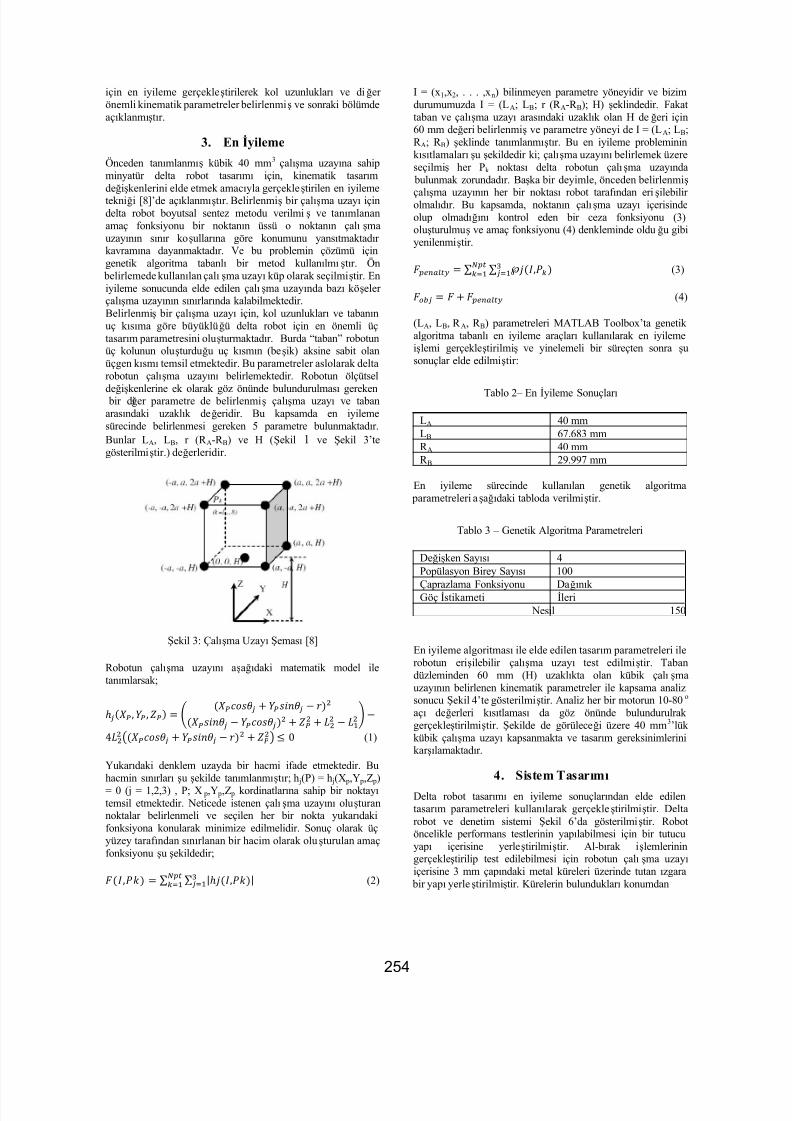
deikenlerine ek olarak göz önünde bulundurulması gereken bir dier parametre de belirlenmi çalıma uzayı ve tabanarasındaki uzaklık deeridir. Bu kapsamda en iyilemesürecinde belirlenmesi gereken 5 parametre bulunmaktadır.Bunlar LA, LB, r (R A-R B) ve H (ekil 1 ve ekil 3’tegösterilmitir.) deerleridir.
ekil 3: Çalıma Uzayı eması [8]
Robotun çalıma uzayını aaıdaki matematik model iletanımlarsak;
(1)
Yukarıdaki denklem uzayda bir hacmi ifade etmektedir. Buhacmin sınırları u ekilde tanımlanmıtır; h j(P) = h j(X p,Y p,Z p)= 0 (j = 1,2,3) , P; X p,Y p,Z p kordinatlarına sahip bir noktayıtemsil etmektedir. Neticede istenen çalıma uzayını oluturannoktalar belirlenmeli ve seçilen her bir nokta yukarıdakifonksiyona konularak minimize edilmelidir. Sonuç olarak üçyüzey tarafından sınırlanan bir hacim olarak oluturulan amaçfonksiyonu u ekildedir;
(2)
I = (x1,x2, . . . ,xn) bilinmeyen parametre yöneyidir ve bizimdurumumuzda I = (LA; LB; r (R A-R B); H) eklindedir. Fakattaban ve çalıma uzayı arasındaki uzaklık olan H deeri için60 mm deeri belirlenmi ve parametre yöneyi de I = (LA; LB;R A; R B) eklinde tanımlanmıtır. Bu en iyileme problemininkısıtlamaları u ekildedir ki; çalıma uzayını belirlemek üzereseçilmi her Pk noktası delta robotun çalıma uzayında
bulunmak zorundadır. Baka bir deyimle, önceden belirlenmi
çalıma uzayının her bir noktası robot tarafından eriilebilir olmalıdır. Bu kapsamda, noktanın çalıma uzayı içerisindeolup olmadıını kontrol eden bir ceza fonksiyonu (3)oluturulmu ve amaç fonksiyonu (4) denkleminde olduu gibiyenilenmitir.
(3) (4)
(LA, LB, R A, R B) parametreleri MATLAB Toolbox’ta genetik algoritma tabanlı en iyileme araçları kullanılarak en iyilemeilemi gerçekletirilmi ve yinelemeli bir süreçten sonra usonuçlar elde edilmitir:
Tablo 2– En yileme Sonuçları
LA 40 mmLB 67.683 mmR A 40 mmR B 29.997 mm
En iyileme sürecinde kullanılan genetik algoritma parametreleri aaıdaki tabloda verilmitir.
Tablo 3 – Genetik Algoritma Parametreleri
Deiken Sayısı 4Popülasyon Birey Sayısı 100
Çaprazlama Fonksiyonu Daınık Göç stikameti leri Nesil 150
En iyileme algoritması ile elde edilen tasarım parametreleri ilerobotun eriilebilir çalıma uzayı test edilmitir. Tabandüzleminden 60 mm (H) uzaklıkta olan kübik çalımauzayının belirlenen kinematik parametreler ile kapsama analizsonucu ekil 4’te gösterilmitir. Analiz her bir motorun 10-80o
açı deerleri kısıtlaması da göz önünde bulundurulrak gerçekletirilmitir. ekilde de görülecei üzere 40 mm3’lük kübik çalıma uzayı kapsanmakta ve tasarım gereksinimlerinikar ılamaktadır.
4. Sistem Tasarımı
Delta robot tasarımı en iyileme sonuçlarından elde edilentasarım parametreleri kullanılarak gerçekletirilmitir. Deltarobot ve denetim sistemi ekil 6’da gösterilmitir. Robotöncelikle performans testlerinin yapılabilmesi için bir tutucuyapı içerisine yerletirilmitir. Al-bırak ilemleriningerçekletirilip test edilebilmesi için robotun çalıma uzayıiçerisine 3 mm çapındaki metal küreleri üzerinde tutan ızgara
bir yapı yerletirilmitir. Kürelerin bulundukları konumdan
254

8/3/2019 delta sabancı
http://slidepdf.com/reader/full/delta-sabanci 4/6
ekil 4 – Çalıma Uzayı Kapsam Kinematik Analizi
alınıp hedef noktaya götürülmesini salamak için de uç takımıolarak bir vakum uç, robota eklenmitir.Minyatür delta robot mekanik tasarımındaki en zor kısmıküresel eklemler oluturmaktadır. Bu küresel eklemler
paralelkenar yapı içerisinde yer alan ve sistemi xyz kartezyen
düzlemine sınırlayan yapının önemli parçalarıdır.Tasarlanmakta olan minyatür delta robot için uygun
boyutlarda bir küresel eklem piyasada hazır olarak bulunmamaktadır. Bu nedenle robota özel bir çözümoluturulması gerekmektedir. Hassasiyet gereksinimi gözönünde bulundurularak yüksek hassasiyetli yüzeylere sahipolan CMM ölçüm uçları bu noktada çözüm olarak kullanılmıtır. Eklem tasarımı ilk prototipte ekil 5’tegösterildii ekilde gerçekletirilmitir.
ekil 5 : Küresel Eklem Tasarımı
Sistemde kullanılmak üzere seçilen eyleyiciler kısıtlı açılı tork motorları olup [-90 90] açıları arasında çalımakta ve [-60 60]derece aralıında da kesintisiz tork salayabilmektedir. Bu
motorların seçilme sebepleri dorudan tahrikli (direct drive)motorlar olmaları ve yüksek hız ve tork deerleriyle deltarobotların en önemli özelliklerini edinebilmelerinisalamalarıdır. Delta robot performansının testi için hızlı bir
prototipleme platformu olan dSPACE 1103 denetim içinkullanılmı, motorlar için gerekli sürücüler özel olarak tasarlanmı ve dSPACE ile sürücüler arasında balantı kartlarıüretilmitir (ekil 6).
5. Deneyler ve Sonuçlar
Robotun konumlandırma performansını test etmek amacıylasistem üzerinde çeitli referanslar verilerek deneyler gerçekletirilmitir. Bu performans testlerinden bir tanesi de10 mm yarıçapında bir çember referans takibidir ve ekil 8’degösterilmitir. Sistem performansını daha detaylı göstermek veanlaılır kılabilmek için sistem referansları ve cevapları motor açı deerleri ve konum deerleri grafikleri ile gösterilmitir.Robot çalıırken ekil 7’de gösterilmitir.
ekil 6 : Delta Robot ve Denetim Sistemi
lk testlerin gerçekletirilmesi için öncelikle konum denetimiiçin PID denetim algoritması kullanılmı ve denetim
parametreleri sistemin hızlı tepkimesi için ayarlanmıtır.Sunulan sonuçlar referans yörüngelerini ve de enkoder verilerinden ileri kinematik denklemleri kullanılarak eldeedilmi olan kordinat çıktılarını içermektedir. Hesaplamalarıneklem uzayındaki verilerin kullanılarak gerçekletirilmesikordinat çıktıları açısından bir kestirim olmaktadır nitekimsistemde bulunan mekanik kusurlar ve toleranslar göz ardıedilmektedir.
Sunulan grafiklerde gösterilenler benzetim sonuçları deilgerçek sistemden elde edilmi deney sonuçlarıdır ve motor enkoderlerinden okunan deerlerden üretilmitir. Hata,referans deerleri ile hesaplanan kordinat çıktıları arasındakimesafeden (5) denklemi kullanılarak hesaplanmıtır.
(5)
Robotun çembersel yörüngesi için verilen referanslar (xkonumu için) ve ölçüm deerleri ekil 9 ve 10’dagösterilmitir. Hata deerlerinin daha iyi incelenebilmesiaçısından grafiin yakınlatırılmı hali de sunulmutur.
ekil 7: Robot Çalıma Sekansı
-30-20
-100
1020
30
-20
0
20
-110
-100
-90
-80
-70
-60
-50
-40
x (mm)
Robot Çalisma Uzayi
y (mm)
z ( m m )
255

8/3/2019 delta sabancı
http://slidepdf.com/reader/full/delta-sabanci 5/6
ekil 8 : Çember Yörünge
X ve Y eksenleri için verilen 10 mm genliinde 1 Hzfrekansındaki aralarında /2 faz farkı bulunan sinüs dalgareferansı ve gerçek x konum deerleri aaıdaki ekildegösterilmitir.
ekil 9 – X Konum Referans ve Gerçek KonumDeerleri
X konumu için performansın daha detaylı gösterildii
yakınlatırılmı ekil aaıda gösterilmitir. (5) denkleminegöre hesaplanan hata ekil 11’te gösterilmitir. Verilenkartezyen kordinat referanslarından geri kinematik denklemleri kullanılarak motor açı deerleri oluturulmutur ve birinci motor için referans deeri ve gerçek motor konumuekil 12 ve ekil 13’te gösterilmitir. Detaylı grafikte her bir enkoder darbesi açık bir ekilde görülebilmektedir.
ekil 10 – X Konumu Detaylı Görünüm
ekil 11 – XYZ Konum Hata
ekil 12 – Motor Açı Referansı (Alfa 1)
Sonuçlar motorların dorudan tahrikli motorlar olmasındankaynaklanan enkoder çözünürlüü kısıtlaması göz önünde
bulundurulduunda tatmin edicidir. Motor açıları ve xyzkonumları için hata verileri Tablo 3’te verilmitir.Enkoder çözünürlüü 0.09°/sinyal ve bu çözünürlük çalımauzayının farklı noktalarında farklı hassasiyetlere tekabületmektedir. Eklem uzayı deerleri ve referansları
gözlemlendiinde hassasiyet açısından elde edilebilecek en iyisonuçlar elde edilmitir nitekim enkoder deerleri referansdeerlerini maksimum 3 enkoder hata salınımıyla takipetmektedir. Mean deerlere bakıldıında bu 1 enkoder hatayatekabül etmektedir. Fakat mekanik aksamda olabilecek kusurlar ve hatalar nedeniyle robot kalibrasyonugerçekletirilmesi gerekmektedir.
ekil 13 – Motor Açı Detaylı Görünüm
256
8/3/2019 delta sabancı
http://slidepdf.com/reader/full/delta-sabanci 6/6
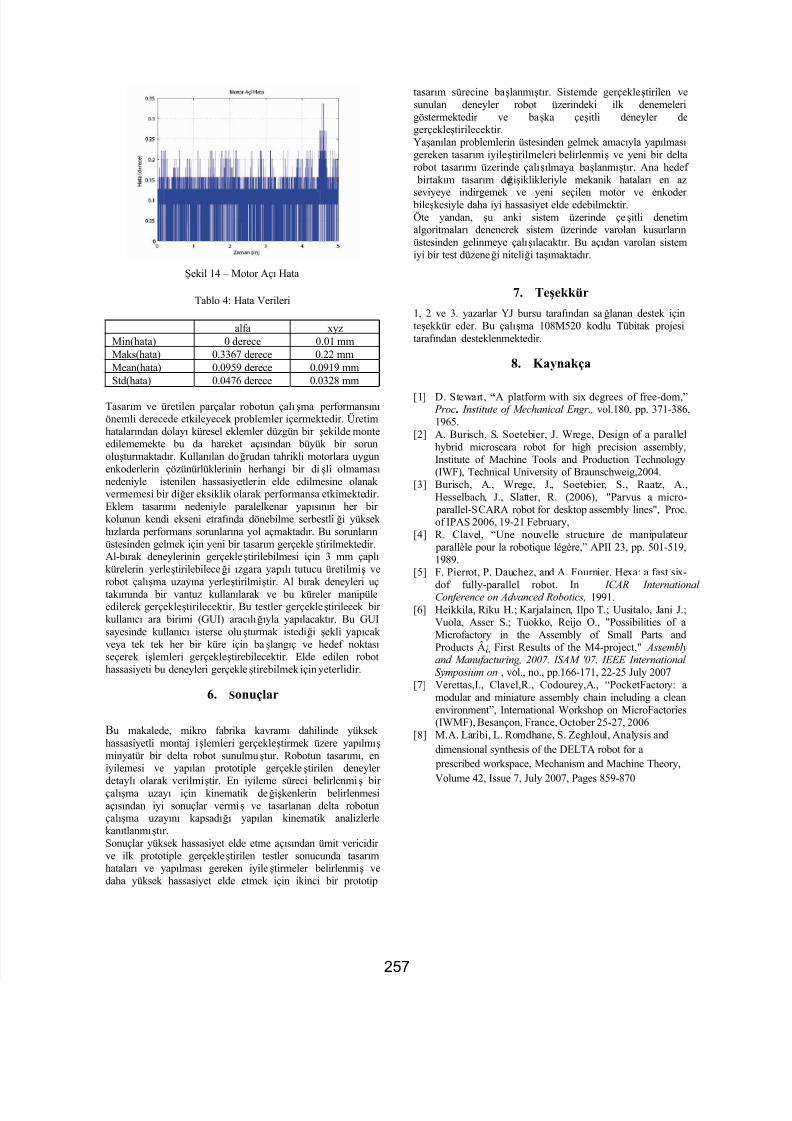
ekil 14 – Motor Açı Hata
Tablo 4: Hata Verileri
alfa xyzMin(hata) 0 derece 0.01 mmMaks(hata) 0.3367 derece 0.22 mmMean(hata) 0.0959 derece 0.0919 mmStd(hata) 0.0476 derece 0.0328 mm
Tasarım ve üretilen parçalar robotun çalıma performansınıönemli derecede etkileyecek problemler içermektedir. Üretimhatalarından dolayı küresel eklemler düzgün bir ekilde monteedilememekte bu da hareket açısından büyük bir sorunoluturmaktadır. Kullanılan dorudan tahrikli motorlara uygunenkoderlerin çözünürlüklerinin herhangi bir dili olmamasınedeniyle istenilen hassasiyetlerin elde edilmesine olanak vermemesi bir dier eksiklik olarak performansa etkimektedir.Eklem tasarımı nedeniyle paralelkenar yapısının her bir kolunun kendi ekseni etrafında dönebilme serbestlii yüksek hızlarda performans sorunlarına yol açmaktadır. Bu sorunlarınüstesinden gelmek için yeni bir tasarım gerçekletirilmektedir.Al-bırak deneylerinin gerçekletirilebilmesi için 3 mm çaplıkürelerin yerletirilebilecei ızgara yapılı tutucu üretilmi verobot çalıma uzayına yerletirilmitir. Al bırak deneyleri uçtakımında bir vantuz kullanılarak ve bu küreler manipüleedilerek gerçekletirilecektir. Bu testler gerçekletirilecek bir kullanıcı ara birimi (GUI) aracılııyla yapılacaktır. Bu GUIsayesinde kullanıcı isterse oluturmak istedii ekli yapıcak veya tek tek her bir küre için balangıç ve hedef noktasıseçerek ilemleri gerçekletirebilecektir. Elde edilen robothassasiyeti bu deneyleri gerçekletirebilmek için yeterlidir.
6. Sonuçlar
Bu makalede, mikro fabrika kavramı dahilinde yüksek hassasiyetli montaj ilemleri gerçekletirmek üzere yapılmıminyatür bir delta robot sunulmutur. Robotun tasarımı, eniyilemesi ve yapılan prototiple gerçekletirilen deneyler
detaylı olarak verilmitir. En iyileme süreci belirlenmi bir çalıma uzayı için kinematik deikenlerin belirlenmesiaçısından iyi sonuçlar vermi ve tasarlanan delta robotunçalıma uzayını kapsadıı yapılan kinematik analizlerlekanıtlanmıtır.Sonuçlar yüksek hassasiyet elde etme açısından ümit vericidir ve ilk prototiple gerçekletirilen testler sonucunda tasarımhataları ve yapılması gereken iyiletirmeler belirlenmi vedaha yüksek hassasiyet elde etmek için ikinci bir prototip
tasarım sürecine balanmıtır. Sistemde gerçekletirilen vesunulan deneyler robot üzerindeki ilk denemelerigöstermektedir ve baka çeitli deneyler degerçekletirilecektir.Yaanılan problemlerin üstesinden gelmek amacıyla yapılmasıgereken tasarım iyiletirilmeleri belirlenmi ve yeni bir deltarobot tasarımı üzerinde çalıılmaya balanmıtır. Ana hedef
birtakım tasarım deiiklikleriyle mekanik hataları en az
seviyeye indirgemek ve yeni seçilen motor ve enkoder bilekesiyle daha iyi hassasiyet elde edebilmektir.Öte yandan, u anki sistem üzerinde çeitli denetimalgoritmaları denenerek sistem üzerinde varolan kusurlarınüstesinden gelinmeye çalıılacaktır. Bu açıdan varolan sistemiyi bir test düzenei nitelii taımaktadır.
7. Teekkür
1, 2 ve 3. yazarlar YJ bursu tarafından salanan destek içinteekkür eder. Bu çalıma 108M520 kodlu Tübitak projesitarafından desteklenmektedir.
8. Kaynakça
[1] D. Stewart, “A platform with six degrees of free-dom,” Proc . Institute of Mechanical Engr., vol.180, pp. 371-386,1965.
[2] A. Burisch, S. Soetebier, J. Wrege, Design of a parallelhybrid microscara robot for high precision assembly,Institute of Machine Tools and Production Technology(IWF), Technical University of Braunschweig,2004.
[3] Burisch, A., Wrege, J., Soetebier, S., Raatz, A.,Hesselbach, J., Slatter, R. (2006), "Parvus a micro-
parallel-SCARA robot for desktop assembly lines", Proc.of IPAS 2006, 19-21 February,
[4] R. Clavel, “Une nouvelle structure de manipulateur parallèle pour la robotique légère,” APII 23, pp. 501-519,1989.
[5] F. Pierrot, P. Dauchez, and A. Fournier. Hexa: a fast six-
dof fully-parallel robot. In ICAR International Conference on Advanced Robotics, 1991.[6] Heikkila, Riku H.; Karjalainen, Ilpo T.; Uusitalo, Jani J.;
Vuola, Asser S.; Tuokko, Reijo O., "Possibilities of aMicrofactory in the Assembly of Small Parts andProducts ¿ First Results of the M4-project," Assemblyand Manufacturing, 2007. ISAM '07. IEEE International Symposium on , vol., no., pp.166-171, 22-25 July 2007
[7] Verettas,I., Clavel,R., Codourey,A., “PocketFactory: amodular and miniature assembly chain including a cleanenvironment”, International Workshop on MicroFactories(IWMF), Besançon, France, October 25-27, 2006
[8] M.A. Laribi, L. Romdhane, S. Zeghloul, Analysis anddimensional synthesis of the DELTA robot for a
prescribed workspace, Mechanism and Machine Theory,Volume 42, Issue 7, July 2007, Pages 859-870
257





























