Embed Size (px)
Citation preview
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA
Y MECÁNICA
CARRERA DE INGENIERÍA EN MECATRÓNICA
TESIS PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN
MECATRÓNICA
AUTORES:
MOYA CÁCERES, PATRICIA GABRIELA
VÁSQUEZ GABELA, STEPHANIE CAROLINA
TEMA: DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO FUNCIONAL
CONTROLADO POR COMPUTADORA PARA LA REHABILITACIÓN DE
CODO Y MUÑECA
DIRECTOR: ING. ACOSTA, MILTON
CODIRECTOR: ING. PINEDA, FLAVIO
SANGOLQUÍ, MARZO 2014
i
CERTIFICACIÓN DE LA ELABORACIÓN DEL PROYECTO
El proyecto “DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO FUNCIONAL
CONTROLADO POR COMPUTADORA PARA LA REHABILITACIÓN DE
CODO Y MUÑECA”, fue realizado en su totalidad por Patricia Gabriela Moya
Cáceres y Stephanie Carolina Vásquez Gabela, como requerimiento parcial
para la obtención del título de Ingeniera en Mecatrónica.
_______________________ _______________________
Ing. Milton Acosta Ing. Flavio Pineda. Msc.
DIRECTOR CODIRECTOR
Sangolquí, Marzo 2014
ii
AUTORÍA DE RESPONSABILIDAD
Certificamos que el título de proyecto de grado: “DISEÑO Y CONSTRUCCIÓN
DE UN PROTOTIPO FUNCIONAL CONTROLADO POR COMPUTADORA
PARA LA REHABILITACIÓN DE CODO Y MUÑECA”, cuyo contenido, ideas y
criterios son de nuestra exclusiva responsabilidad y autoría.
ELABORADO POR:
_________________________ ___________________________
Patricia Gabriela Moya Cáceres Stephanie Carolina Vásquez Gabela
CARRERA DE INGENIERÍA MECATRÓNICA.
_______________________
Ing. Francisco Terneus.
Director de la Carrera de Ingeniería Mecatrónica.
Sangolquí, Marzo 2014
iii
CARRERA DE INGENIERÍA MECATRÓNICA
AUTORIZACIÓN
Nosotros, Patricia Gabriela Moya Cáceres y Stephanie Carolina Vásquez
Gabela:
Autorizamos a la Universidad de las Fuerzas Armadas – ESPE, la publicación
en la biblioteca virtual de la institución, del proyecto de grado titulado: “DISEÑO
Y CONSTRUCCIÓN DE UN PROTOTIPO FUNCIONAL CONTROLADO POR
COMPUTADORA PARA LA REHABILITACIÓN DE CODO Y MUÑECA”.
___________________________ _____________________________ Patricia Gabriela Moya Cáceres Stephanie Carolina Vásquez Gabela
Sangolquí, Marzo 2014
iv
DEDICATORIA
A la mejor familia del mundo, mis padres, Fernando y Patricia, mis hermanos,
Fernando y Daniel y mi abuelita Fanny.
A mi compañero de vida Carlitos Alonso.
Gabriela Moya
v
DEDICATORIA
A mis papás, Martha y Diego y a mi hermano Carlos que los amo con todo mi
ser.
A mi abuelito Lucho, a mis abuelitas Teresita y Merceditas.
A quien en un futuro pueda serle útil este proyecto de grado.
Stephanie Vásquez
vi
AGRADECIMIENTO
A Dios, por haberme regalado cada día de vida, por enseñarme a valorar todas
las oportunidades que puso en mi camino y permitir ser una mejor persona
cada día.
A mis padres, por ser mi apoyo incondicional, por sus preocupaciones y
palabras de aliento, pero sobre todo por el amor que cada día me brindan. Los
amo. A mis hermanos Fernando y Daniel, cada uno ha sabido inspirarme a su
manera, gracias por cuidar de mí y quererme tanto.
A mis abuelitos, Fanny, Inés y Luis por el cariño y el ejemplo de vida que me
han dado. A mis tíos Yasmina, Ney y Pepe, mis primos Ma. Isabel y Luis que
más que primos son hermanos, muchas gracias.
A Carlos, por acompañarme en esta etapa de mi vida, por brindarme su amor,
comprensión y apoyo. Te amo.
A Stephanie por ser la mejor compañera de tesis, gracias por tu paciencia,
apoyo y sobre todo tu alegría y optimismo, muchas gracias amiga. A su familia
que siempre estuvo presta a ayudarnos.
vii
A mis amigos Jorge, Pablo, Gaby, Vane, Katy, Lenin, Andrés, Enrique y Ma.
Fernanda gracias por todos los momentos compartidos, por las palabras de
ánimo y su gran apoyo, son los mejores.
Gabriela Moya
viii
AGRADECIMIENTO
No me alcanzan las palabras ni el sentimiento para expresar lo mucho que
agradezco las personas que tengo en mi vida. A mis padres, quienes se
desviven por sus hijos y dejan todo por nosotros, al ñañito Caliman, y a toda mi
familia que me ha apoyado siempre porque sin ellos mi vida no tendría sentido
alguno.
Agradezco a Gaby, por compartir conmigo una linda experiencia en la que
además de llegarla a conocer mejor, fue un increíble apoyo, una gran persona y
amiga, a su familia quienes me supieron recibir amablemente en su casa.
A JuanG, a quien admiro por todos sus valores y sus conocimientos, además
de ser un gran amigo y maestro. Además, a quienes he conocido a través del
capoeira, y a este deporte porque al hacerlo parte de mi vida me he llenado de
alegría.
A mis amigos de la universidad que entre risas, preocupaciones y amanecidas
se formaron grandes lazos, a quienes y agradezco infinitamente por todo lo
compartido y los llevaré en mi corazón.
Quisiera tener más espacio para mencionar a quienes agradezco, sobre todo a
Johanna, Daniela, Denise, Cristian, Pau, Kiki, Ome, a los rock!, amigos
ix
cercanos de capoeira, colegio y universidad, porque han sido ellos que han
motivado el desarrollo de este proyecto siendo importantes en mi vida en todo
momento.
Stephanie Vásquez
x
ÍNDICE DE CONTENIDOS
CERTIFICACIÓN DE LA ELABORACIÓN DEL PROYECTO ......................... i
AUTORÍA DE RESPONSABILIDAD .............................................................. ii
AUTORIZACIÓN ............................................................................................ iii
DEDICATORIA ............................................................................................. iv
AGRADECIMIENTO ..................................................................................... vi
ÍNDICE DE CONTENIDOS ............................................................................ x
ÍNDICE DE TABLAS ................................................................................... xxv
ÍNDICE DE FIGURAS ................................................................................ xxxi
ÍNDICE DE ANEXOS ..............................................................................xxxviii
RESUMEN .............................................................................................. xxxix
ABSTRACT ................................................................................................... xl
1. CAPÍTULO 1 ............................................................................... 1
1.1 Antecedentes .............................................................................. 1
1.2 Justificación ................................................................................. 2
xi
1.3 Alcance del Proyecto ................................................................... 4
1.4 Objetivos ..................................................................................... 6
1.4.1 Objetivo General: ........................................................................ 6
1.4.2 Objetivos Específicos: ................................................................. 6
1.5 Metodología ................................................................................ 7
2. CAPÍTULO 2 ............................................................................... 9
2.1 Introducción de la Robótica en la Rehabilitación ......................... 9
2.2 Conceptos Básicos .................................................................... 11
2.2.1 Diseño de Máquinas .................................................................. 11
2.2.2 Prototipo .................................................................................... 12
2.2.3 Validación de Prototipos ............................................................ 13
2.2.4 Transferencia de Tecnología de Prototipo/ Máquina ................. 13
2.2.5 Fases de Rehabilitación: ........................................................... 14
2.2.5.1 Primera Fase de Rehabilitación: ............................................... 14
2.2.5.2 Segunda Fase de Rehabilitación:.............................................. 14
xii
2.2.5.3 Tercera Fase de Rehabilitación: ............................................... 14
2.2.6 Tipos de Movimientos en Rehabilitación: .................................. 15
2.2.6.1 Movimientos Pasivos ................................................................. 15
2.2.6.2 Movimientos Activos .................................................................. 15
2.2.6.3 Movimientos Activo – Asistidos ................................................. 15
2.2.6.4 Movimiento Resistido ................................................................ 15
2.3 Estado del Arte en Robots para rehabilitación en Terapia
Ocupacional .............................................................................. 16
2.3.1 Terapia Ocupacional ................................................................. 16
2.4 Biomecánica del Miembro Superior ........................................... 18
2.4.1 Introducción ............................................................................... 18
2.4.2 Planimetría ................................................................................ 19
2.4.2.1 Plano sagital medio ................................................................... 20
2.4.2.2 Plano frontal o coronal .............................................................. 21
2.4.2.3 Plano transversal u horizontal ................................................... 21
xiii
2.4.3 Rango de movimiento y Ángulos del Miembro Superior
Humano ..................................................................................... 21
2.4.3.1 Articulación del codo ................................................................. 21
2.4.3.1.1 Analogía Mecánica: ................................................................... 22
2.4.3.1.2 Movimientos de Flexión-Extensión: ........................................... 22
2.4.3.1.3 Movimientos de Pronación-supinación: ..................................... 23
2.4.3.2 Articulación de la muñeca ......................................................... 24
2.4.3.2.1 Analogía Mecánica: ................................................................... 25
2.4.3.2.2 Movimientos de Flexión-extensión: ........................................... 25
2.4.3.2.3 Movimientos de Aducción y Abducción ..................................... 26
2.4.4 Antropometría miembro superior ............................................... 27
2.4.4.1 Medidas Antebrazo, Mano y Muñeca ........................................ 28
3. CAPITULO 3 ............................................................................. 32
3.1 Consideraciones de Diseño ...................................................... 32
3.1.1 Requisitos y restricciones .......................................................... 32
3.1.1.1 Consideración antropomórfica .................................................. 32
xiv
3.1.1.2 Tipos de movimientos ............................................................... 33
3.1.1.3 Número de grados de libertad ................................................... 33
3.1.1.4 Trabajo pasivo o discreto .......................................................... 34
3.1.1.5 Dimensiones de la extremidad superior .................................... 34
3.1.1.6 Consideraciones Eléctricas y Electrónicas ................................ 36
3.1.1.7 Consideraciones de Control ...................................................... 38
3.2 Estructura general del sistema .................................................. 38
3.3 Selección del Tipo de Motor ...................................................... 39
3.3.1 Motor de Corriente Continua ..................................................... 41
3.3.1.1 Motor a pasos ........................................................................... 41
3.3.1.2 Servomotor ................................................................................ 42
3.3.2 Análisis y Selección ................................................................... 42
3.4 Diseño Mecánico ....................................................................... 44
3.4.1 Herramientas de desarrollo ....................................................... 44
3.4.1.1 SolidWorks ................................................................................ 44
xv
3.4.2 Diseño de mecanismos ............................................................. 44
3.4.3 Sistema de Soporte y Desplazamiento ..................................... 46
3.4.4 Sistema de acople para el Actuador .......................................... 51
3.4.4.1 Cálculo de Torque ..................................................................... 52
3.4.4.2 Selección de modelo de Servomotor ......................................... 53
3.4.4.3 Mecanismo de acople de motor ................................................ 55
3.4.5 Base para montaje del motor .................................................... 58
3.4.6 Adaptación para el mecanismo de la flexión y extensión del
codo .......................................................................................... 59
3.4.6.1 Selección del mecanismo .......................................................... 59
3.4.6.1.1 Selección del mango ................................................................. 63
3.4.7 Adaptación para el mecanismo de la pronación y supinación
del codo ..................................................................................... 64
3.4.7.1 Selección del mecanismo .......................................................... 64
3.4.8 Adaptación para el mecanismo de abducción y aducción de la
muñeca ..................................................................................... 66
xvi
3.4.8.1 Selección del mecanismo .......................................................... 66
3.4.9 Adaptación para el mecanismo de la flexión y extensión de la
muñeca ..................................................................................... 67
3.4.9.1 Selección del mecanismo .......................................................... 67
3.4.10 Diseño de cubierta del prototipo ................................................ 68
3.4.10.1 Cubierta frontal y posterior de base .......................................... 69
3.4.10.2 Cubierta posterior ...................................................................... 71
3.4.11 Selección del material ............................................................... 71
3.4.12 Análisis y Simulación ................................................................. 75
3.5 Diseño Electrónico .................................................................... 80
3.5.1 Herramientas de Desarrollo ...................................................... 80
3.5.1.1 ISIS ........................................................................................... 80
3.5.1.2 Ares ........................................................................................... 80
3.5.2 Diseño del Sistema Electrónico ................................................. 80
3.5.2.1 Tarjeta de Interfaz de Sensores ................................................ 82
3.5.2.1.1 Ángulo y sentido de giro ............................................................ 82
xvii
3.5.2.1.2 Finales de Carrera ..................................................................... 87
3.5.2.1.3 Alimentación .............................................................................. 88
3.5.2.2 Tarjeta de Control ...................................................................... 89
3.5.2.2.1 Distribución de pines para la aplicación .................................... 91
3.6 Programación ............................................................................ 93
3.6.1 Herramientas de desarrollo ....................................................... 93
3.6.1.1 Matlab ....................................................................................... 93
3.6.1.2 Arduino ...................................................................................... 93
3.6.2 Diseño del Software del Sistema Electrónico ............................ 93
3.6.2.1 Flujograma general del Software del Sistema Electrónico ........ 93
3.6.2.1.1 Pantalla de presentación ........................................................... 95
3.6.2.1.2 Ingreso de datos para la rehabilitación del paciente ................. 95
3.6.2.1.3 Proceso de acuerdo a rehabilitación seleccionada ................... 95
3.6.2.1.4 Salir ........................................................................................... 95
3.6.2.2 Requisitos del software del sistema electrónico ........................ 96
xviii
3.6.2.2.1 Establecimiento de comunicación con tarjeta Arduino .............. 96
3.6.2.2.1.1 Configuración de la Comunicación ............................................ 97
3.6.2.2.1.2 Librerías necesarias para la comunicación Matlab-Arduino ...... 97
3.6.2.2.1.3 Pasos para realizar la comunicación entre Matlab-Arduino ...... 98
3.6.2.2.2 Calibración del prototipo ............................................................ 98
3.6.2.2.3 Proceso de rehabilitación de acuerdo a lo ingresado por el
usuario. ..................................................................................... 98
3.6.2.2.3.1 Inicialización de variables .......................................................... 99
3.6.2.2.3.2 Establecer comunicación Matlab Arduino ............................... 100
3.6.2.2.3.3 Ubicación de servomotor en posición inicial ............................ 101
3.6.2.2.3.4 Envío y recepción de señales para proceso de rehabilitación . 102
3.6.2.2.3.5 Culminación de proceso .......................................................... 104
3.6.2.2.3.6 Envío y recepción de señales para culminación de proceso
de rehabilitación ...................................................................... 104
3.6.3 Diseño del software del prototipo ............................................ 104
xix
3.6.3.1 Diagrama de flujo de la programación del software del
prototipo .................................................................................. 105
3.6.3.2 General ................................................................................... 105
3.6.3.2.1 Selección de proceso .............................................................. 105
3.6.3.2.2 Ejecución ................................................................................. 106
3.6.3.3 Subprocesos ........................................................................... 106
3.6.3.3.1 Selección de proceso .............................................................. 114
3.6.3.4 Calibración del sistema ........................................................... 115
3.6.3.4.1 Configuración del puerto USB ................................................. 116
3.6.3.4.2 Comunicación USB entre Matlab- Arduino .............................. 117
3.6.3.4.3 Funcionamiento de sensores .................................................. 117
3.6.3.4.4 Funcionamiento del motor ....................................................... 117
3.6.3.4.5 Código para la calibración del motor ....................................... 118
3.6.3.5 Rehabilitación .......................................................................... 119
3.6.3.5.1 Zona de articulación a rehabilitar ............................................ 121
3.6.3.5.2 Brazo a rehabilitar ................................................................... 121
xx
3.6.3.5.3 Movimiento a realizar .............................................................. 121
3.6.3.5.4 Ingreso de ciclo de trabajo ...................................................... 122
3.6.3.5.4.1 Rango angular de trabajo ........................................................ 123
3.6.3.5.4.2 Número de repeticiones y series ............................................. 123
3.6.3.5.4.3 Velocidad de trabajo ................................................................ 124
3.6.3.5.5 Configuración del puerto USB ................................................. 124
3.6.3.5.6 Confirmación de ciclo ingresado ............................................. 124
3.6.3.5.7 Comunicación USB Matlab-Arduino ........................................ 124
3.6.3.5.8 Ejecución ................................................................................. 125
3.6.3.5.8.1 Inicialización de variables ........................................................ 126
3.6.3.5.8.2 Movimiento desde posición inicial a ángulo mínimo ................ 126
3.6.3.5.8.3 Movimiento desde ángulo mínimo a ángulo máximo ............... 128
3.6.3.5.8.4 Movimiento desde ángulo máximo a ángulo mínimo............... 128
3.6.3.5.8.5 Cumplimiento del número de repeticiones y series ................. 129
3.6.3.5.8.6 Término de proceso ................................................................ 134
xxi
3.6.4 Consideraciones de contadores durante la ejecución del
proceso ................................................................................... 136
3.6.5 Mensajes desplegados en la interfaz ...................................... 137
4. Capítulo 4 ................................................................................ 141
4.1 Diseño del Proceso de Construcción ...................................... 141
4.2 Ensamblaje del Prototipo ........................................................ 156
4.3 Implementación Sistema Eléctrico .......................................... 159
4.3.1 Elaboración del Circuito Impreso............................................. 159
4.3.1.1 Criterios de Diseño del PCB .................................................... 159
4.3.1.2 Cálculos de Ancho de Pista .................................................... 160
4.3.1.2.1 Cálculo del ancho de pistas en la alimentación de la placa .... 160
4.3.1.2.2 Cálculo del ancho de pistas de alimentación y señal: ............. 162
4.3.1.3 Circuito esquemático .............................................................. 164
4.3.1.3.1 Distribución de elementos en ARES ....................................... 164
4.3.1.3.2 Diseño de layout de PCB ........................................................ 165
4.3.1.3.3 Vista 3D ................................................................................... 166
xxii
4.3.1.4 Lista de Materiales .................................................................. 167
4.3.2 Ubicación sensores finales de carrera. ................................... 168
4.3.3 Conexión física de sensores a la tarjeta interfaz. .................... 169
4.3.3.1 Sección 1 ................................................................................ 170
4.3.3.2 Sección 2 ................................................................................ 171
4.3.3.3 Sección 3 ................................................................................ 173
4.3.3.4 Sección 4 ................................................................................ 174
4.3.3.5 Sección 5 ................................................................................ 175
4.4 Implementación Interfaz de Operación .................................... 176
4.4.1 Pantallas de comando ............................................................. 176
4.4.1.1 Pantalla 1: Ingreso de Usuario ................................................ 176
4.4.1.2 Pantalla 2: Ingreso de Datos ................................................... 178
4.4.1.3 Pantalla 3: Selección de Ciclo de Trabajo ............................... 178
4.4.4.1 Pantalla 1: Información General .............................................. 185
4.4.4.2 Pantalla 2: Tipo de Movimiento y Ángulos de Trabajo ............ 186
xxiii
4.5 Validación General de Prototipo de Rehabilitación para codo
y Muñeca ................................................................................. 187
4.5.1 Realización de Pruebas .......................................................... 188
4.5.2 Protocolo de Pruebas .............................................................. 188
4.5.3 Metodología de Pruebas ......................................................... 191
4.5.4 Ejecución de las Pruebas ........................................................ 194
4.5.4.1 Pruebas de calibración ............................................................ 194
4.5.4.2 Pruebas de ejecución .............................................................. 197
4.5.5 Análisis de Resultados ............................................................ 208
5. CAPÍTULO 5 ........................................................................... 217
5.1 Análisis Financiero .................................................................. 217
5.1.1 Presupuesto de inversión ........................................................ 218
5.1.1.1 Mano de obra y materiales ...................................................... 218
5.1.2 Presupuesto de Egresos ......................................................... 220
5.1.2.1 Costos Fijos ............................................................................ 220
5.1.2.2 Costos Variables ..................................................................... 221
xxiv
5.1.2.3 Gastos generales y administrativos ......................................... 222
5.1.2.3.1 Generales ................................................................................ 222
5.1.2.3.2 Administrativos ........................................................................ 222
5.1.2.4 Depreciación ........................................................................... 223
5.1.3 Presupuesto de Ingresos ........................................................ 224
5.1.3.1 Demanda Esperada ................................................................ 224
5.1.4 Proyección de Ingresos y Egresos .......................................... 225
5.1.5 Estado de Resultados ............................................................. 226
5.1.6 Flujo de Caja ........................................................................... 228
5.1.7 Evaluación Financiera ............................................................. 229
6. Capítulo 6 ................................................................................ 231
6.1 Conclusiones ........................................................................... 231
6.2 Recomendaciones ................................................................... 234
xxv
ÍNDICE DE TABLAS
Tabla 1 Total de personas registradas en el CONADIS (2012) ..................... 3
Tabla 2 Alcance del proyecto ......................................................................... 5
Tabla 3 Dimensiones mano y muñeca masculino y femenino. .................... 29
Tabla 4 Dimensiones de la mano y la muñeca sujetando un mango. .......... 30
Tabla 5 Dimensiones del antebrazo masculino y femenino. ........................ 31
Tabla 6 Denominación de partes del antebrazo y muñeca. ......................... 31
Tabla 7 Grados de libertad y ángulos de movilidad. .................................... 34
Tabla 8 Dimensiones consideradas de mano y muñeca. ............................. 35
Tabla 9 Masas consideradas de mano, antebrazo y muñeca. ..................... 36
Tabla 10 Consideraciones eléctricas para el actuador................................. 37
Tabla 11 Variables de Control. ..................................................................... 38
Tabla 12 Motor DC vs motor AC. ................................................................. 40
Tabla 13 Valoración. .................................................................................... 43
Tabla 14 Selección del tipo de motor. .......................................................... 43
xxvi
Tabla 15 Servomotores presentes en el mercado. ...................................... 54
Tabla 16 Especificaciones técnicas servomotor Torxis i00600. ................... 54
Tabla 17 Propiedades del Acero y Aluminio ................................................ 72
Tabla 18 Valoración de características ........................................................ 73
Tabla 19 Tabla comparativa de propiedades del Acero y Aluminio para la
selección. ..................................................................................................... 73
Tabla 20 Características perfiles cuadrados DIPAC. ................................... 74
Tabla 21 Características plancha de acero galvanizado DIPAC .................. 75
Tabla 22 Análisis de resistencia de los Mecanismos Propuestos. ............... 76
Tabla 23 Distribución de Sensores .............................................................. 81
Tabla 24 Flipflop 74LS74 ............................................................................. 87
Tabla 25 Especificaciones Arduino Uno R3. ................................................ 90
Tabla 26 Asignación de pines tarjeta Arduino. ............................................. 92
Tabla 27 Configuración comunicación serial. ............................................... 97
Tabla 28 Posición inicial del motor ............................................................. 102
Tabla 29 Variables del programa ............................................................... 107
xxvii
Tabla 30 Funciones que intervienen en la programación ........................... 109
Tabla 31 Escalamiento de valor de señal y el ángulo correspondiente ..... 112
Tabla 32 Límites angulares de acuerdo al movimiento. ............................. 122
Tabla 33 Posición inicial del motor ............................................................. 127
Tabla 34 Valores de contadores en posiciones iniciales y finales. ............. 137
Tabla 35 . Mensajes desplegados en la interfaz ........................................ 138
Tabla 36 Leyenda del diagrama del proceso de construcción mano de
obra. ........................................................................................................... 155
Tabla 37 Leyenda del diagrama del proceso de construcción maquinaria. 156
Tabla 38 Referencia de planos. ................................................................. 157
Tabla 39 Lista de materiales ...................................................................... 167
Tabla 40 Detalle ubicación finales de carrera. ........................................... 169
Tabla 41 Conexión sección 2. .................................................................... 172
Tabla 42 Función de botones de pantalla 1. .............................................. 177
Tabla 43 Función de botones de pantalla 1. .............................................. 182
Tabla 44 Función de botones de mantenimiento. ...................................... 184
xxviii
Tabla 45 Pruebas planteadas. ................................................................... 189
Tabla 46 Valoración variables cualitativas. ................................................ 190
Tabla 47 Valoración variables cuantitativas. .............................................. 190
Tabla 48 Metodología pruebas de campo. ................................................. 191
Tabla 49 Datos obtenidos en la prueba de movilidad del motor. ............... 195
Tabla 50 Datos obtenidos en la prueba de sensores. ................................ 196
Tabla 51 Datos obtenidos en la prueba de calibración varias. ................... 197
Tabla 52 Datos obtenidos en la prueba de ejecución sin adaptación y
sin paciente. ............................................................................................... 198
Tabla 53 Datos obtenidos en la prueba de ejecución con adaptación y
sin paciente. ............................................................................................... 200
Tabla 54 Datos informativos del paciente. ................................................. 202
Tabla 55 Datos obtenidos en la prueba de ejecución con adaptación y
con paciente. .............................................................................................. 203
Tabla 56 Datos obtenidos en la prueba de ejecución con adaptación y
con paciente sano. ..................................................................................... 205
xxix
Tabla 57 Datos obtenidos prueba de ergonomía y adaptabilidad. ............. 207
Tabla 58 Valoración prueba de movilidad de motor. .................................. 208
Tabla 59 Errores prueba de movilidad de motor. ....................................... 209
Tabla 60 Valoración pruebas sensores. ..................................................... 210
Tabla 61 Valoración pruebas de calibración varias. ................................... 211
Tabla 62 Valoración pruebas sin adaptación y sin paciente. ..................... 212
Tabla 63 Valoración pruebas con adaptación y sin paciente ..................... 213
Tabla 64 Historial de movilidad paciente. ................................................... 214
Tabla 65 Valoración pruebas con paciente sano. ...................................... 216
Tabla 66 Presupuesto de inversión materiales. ......................................... 218
Tabla 67 Presupuesto de Inversión mano de obra. ................................... 219
Tabla 68 Costos fijos. ................................................................................. 220
Tabla 69 Costos variables. ......................................................................... 221
Tabla 70 Gastos generales. ....................................................................... 222
Tabla 71 Gastos administrativos. ............................................................... 223
xxx
Tabla 72 Depreciación. .............................................................................. 224
Tabla 73 Demanda esperada. .................................................................... 225
Tabla 74 Proyección de ingresos y egresos. ............................................. 226
Tabla 75 Estado de resultados. ................................................................. 227
Tabla 76 Flujo de caja. ............................................................................... 228
Tabla 77 Evaluación financiera. ................................................................. 229
xxxi
ÍNDICE DE FIGURAS
Figura 1 Rehabilitación de la extremidad superior. ........................................ 2
Figura 2 Metodología para elaboración del proyecto de tesis ........................ 8
Figura 3 Diagrama de la robótica en la Rehabilitación. ................................ 10
Figura 4 Planos y ejes del cuerpo. ............................................................... 20
Figura 5 Articulación del codo. ..................................................................... 22
Figura 6 Movimientos de flexión y extensión del codo. ................................ 23
Figura 7 Movimientos de supinación y pronación del codo. ......................... 24
Figura 8 Articulación de la muñeca. ............................................................. 25
Figura 9 Movimientos de flexión y extensión de la muñeca. ........................ 26
Figura 10 Movimientos de aducción y abducción de la muñeca. ................. 27
Figura 11 Dimensiones muñeca y mano promedio. ..................................... 28
Figura 12 Dimensiones de la mano y la muñeca sujetando el mango. ........ 29
Figura 13 Dimensiones del antebrazo. ......................................................... 30
Figura 14 Diagrama de Bloques General. .................................................... 39
xxxii
Figura 15 Diagrama de bloques de los mecanismos. .................................. 46
Figura 16 Canal principal. ............................................................................ 47
Figura 17 Canal secundario. ........................................................................ 48
Figura 18 Posición Inicial ............................................................................. 49
Figura 19 Medidas ergonómicas en posición sentada dadas en cm. ........... 50
Figura 20 Soportes móviles para el antebrazo y muñeca. ........................... 51
Figura 21 Servomotor Torxis i00600. ........................................................... 55
Figura 22 Servomotor Torxis i00600 con disco de 12.5 cm de diámetro. .... 56
Figura 23 Perfil metálico cuadrado de 1 pulgada. ........................................ 57
Figura 24 Sistema de acople de motor. ....................................................... 57
Figura 25 Soporte servomotor. .................................................................... 58
Figura 26 Base de motor ensamblado el motor y adaptación. ..................... 59
Figura 27 Acople del mango al mecanismo. ................................................ 60
Figura 28 Mango para la flexión y extensión del codo. ................................ 61
Figura 29 Dimensiones acople mango al mecanismo de flexión y
extensión del codo. ...................................................................................... 62
xxxiii
Figura 30 Mecanismo de flexión y extensión del codo. ................................ 62
Figura 31 Dimensiones Mango para mecanismos propuestos. ................... 64
Figura 32 Mecanismo en U para la pronación y supinación del codo. ......... 65
Figura 33 Adaptación del mecanismo para la abducción y aducción del
motor. ........................................................................................................... 67
Figura 34 Adaptación para flexión y extensión de la muñeca. ..................... 68
Figura 35 Cubierta frontal y posterior de base ............................................. 70
Figura 36 Vista frontal de la Cubierta frontal y posterior de base ................ 70
Figura 37 Cubierta posterior ........................................................................ 71
Figura 38 Perfil cuadrado. ............................................................................ 74
Figura 39 Diagrama del Sistema Electrónico ............................................... 81
Figura 40 Disco dentado. ............................................................................. 83
Figura 41 Señales obtenidas de los LDR. .................................................... 84
Figura 42 Características transistor NPN 2N3904 ....................................... 85
Figura 43 Circuito encoder incremental ....................................................... 86
Figura 44 Circuito de acondicionamiento de señal encoder óptico. ............. 86
xxxiv
Figura 45 Circuito de acondicionamiento final de carrera. ........................... 88
Figura 46 Circuito de alimentación de la placa ............................................ 89
Figura 47 Tarjeta Arduino Uno R3 ............................................................... 91
Figura 48 Diagrama de bloques general del software del sistema
electrónico. ................................................................................................... 94
Figura 49 Diagrama de bloques general de programación del sistema. ...... 99
Figura 50 Flujograma para el establecimiento de comunicación entre
Matlab y Arduino. ....................................................................................... 100
Figura 51 Flujograma para la ubicación de servomotor en posición inicial 101
Figura 52 Flujograma para el envío y recepción de señales para el
proceso de rehabilitación. .......................................................................... 103
Figura 53 Diagrama de flujo general .......................................................... 105
Figura 54 Diagrama de flujo de selección de proceso. .............................. 114
Figura 55 Diagrama de flujo de calibración del sistema. ............................ 116
Figura 56 Diagrama de flujo rehabilitación ................................................. 120
Figura 57 Ingreso de ciclo de trabajo ......................................................... 123
xxxv
Figura 58 Ejecución del proceso ................................................................ 125
Figura 59 Esquema del prototipo de rehabilitación para codo y muñeca. .. 141
Figura 60 Diagrama del Proceso de Construcción ..................................... 142
Figura 61 Corriente vs área transversal del conductor para 1A. ................ 160
Figura 62 Ancho del conducto vs sección transversal para 10 th. ............. 161
Figura 63 Ancho de pista de 20 th bornera J1. .......................................... 161
Figura 64 Corriente vs área transversal del conductor para 0.1A. ............. 162
Figura 65 Ancho del conducto vs sección transversal para 3 th. ............... 163
Figura 66 Esquemático PCB distribución de componentes. ...................... 165
Figura 67 Top copper PCB. ....................................................................... 165
Figura 68 Bottom copper PCB. .................................................................. 166
Figura 69 Vista 3D placa. ........................................................................... 166
Figura 70 Ubicación sensores finales de carrera ....................................... 168
Figura 71 Conexión tarjeta interfaz sensores. ............................................ 170
Figura 72 Diagrama de conexión foto barrera en U. .................................. 171
xxxvi
Figura 73 Sección 1 finales de carrera. ...................................................... 171
Figura 74 Sección 2 salidas tarjeta de control. .......................................... 172
Figura 75 Ubicación sensores de posición angular y giro. ......................... 173
Figura 76 Diagrama de conexión LDR. ...................................................... 174
Figura 77 Sección 3 entradas sensores de giro y posición angular. .......... 174
Figura 78 Bornera de conexión paro de emergencia. ................................ 175
Figura 79 Bornera de conexión de la fuente de alimentación. ................... 175
Figura 80 Pantalla inicial interfaz gráfica. ................................................... 177
Figura 81 Pantalla de ingreso de datos. ..................................................... 178
Figura 82 Pantalla de selección de ciclo de trabajo. .................................. 179
Figura 83 Pantalla de confirmación de ciclo de trabajo. ............................. 180
Figura 84 Pantalla de proceso. .................................................................. 181
Figura 85 Ingreso de Usuario de Mantenimiento. ...................................... 183
Figura 86 Pantalla de mantenimiento......................................................... 184
Figura 87 Pantalla de ayuda: información general. .................................... 185
xxxvii
Figura 88 Pantalla de ayuda: tipo de movimiento y ángulo de trabajo. ..... 186
Figura 89 Pantalla de ayuda: ubicación de la adaptación. ......................... 187
Figura 90 Tendencia error vs desfase angular. .......................................... 209
Figura 91 Tendencia sesión de rehabilitación vs ángulo de movilidad
rehabilitación muñeca. ............................................................................... 215
Figura 92 Tendencia sesión de rehabilitación vs ángulo de movilidad
rehabilitación codo. .................................................................................... 215
xxxviii
ÍNDICE DE ANEXOS
Anexo A: Planos Mecánicos
Anexo B: Hojas de Procesos
Anexo C: Diagrama de Conexión
Anexo D: Datasheets
Anexo E: Código de Matlab
Anexo F: Manual de Usuario
Anexo G: Pruebas de Campo
xxxix
RESUMEN
El presente proyecto describe el desarrollo de un prototipo de rehabilitación
para el codo y la muñeca, destinado a usarse en la primera y segunda etapa de
rehabilitación, donde el paciente debe realizar ejercicios pasivamente para
lograr recuperar progresivamente la movilidad completa de sus articulaciones.
Se han tomado en consideración la biomecánica y antropometría del brazo para
así llevar a cabo los movimientos de flexión- extensión, pronación-supinación
del codo, flexión-extensión, abducción-aducción de la muñeca mediante un
diseño adaptable a cada paciente, siendo útil para la rehabilitación del brazo
izquierdo o derecho del paciente. Además el proyecto consta de una interfaz
gráfica amigable al usuario, para el control del proceso de rehabilitación,
haciendo su utilización de fácil entendimiento lo que permite utilizar
rápidamente el prototipo y adaptarlo al proceso de rehabilitación requerido por
el paciente.
Palabras Claves:
Rehabilitación
Extremidad Superior
Servomotor
Arduino

xl
ABSTRACT
This project describes the development of a rehabilitation prototype for elbow
and wrist. It is meant to be used during the first and second phases of
rehabilitation when the patient should exercise passively in order to recover the
complete mobility of his joints progressively. The biomechanics and
anthropometrics are taken into account in order to generate the movements of
flexion - extension, pronation – supination in the elbow, flexion – extension, and
abduction – adduction in the wrist following an adaptable design for every
patient. In addition, this prototype allows the rehabilitation for either the left or
the right arm. The project consists of a graphic user’s interface to control the
rehabilitation process. It is easy to understand. For this reason, the user is able
to learn to control the prototype in a short time and setup the process required
for a patient.
Keywords:
Rehabilitation
Upper Limb
Servomotor
Arduino
1
1. CAPÍTULO 1
INTRODUCCIÓN
1.1 Antecedentes
En la actualidad encontramos en hospitales y clínicas, muchos tipos de
máquinas de rehabilitación con tecnología de última generación, están
enfocados a rehabilitar órganos, músculos y tejidos con distintas causas de
lesiones o dificultades de movimiento por previos accidentes o enfermedades,
es decir, recobrar de manera significativa el movimiento óptimo y funcionalidad
de las partes del cuerpo humano que se han visto afectadas.
Las máquinas de rehabilitación están orientadas a personas con problemas
neurológicos, personas con proceso de recuperación post-operación, fracturas
y demás enfermedades relacionadas con la movilidad de sus extremidades,
enfermedades que necesitan de una asistencia médica en el área de Terapia
Ocupacional; considerando la dificultad por parte de los pacientes a realizar
ejercicios por su propia voluntad por presencia de dolor, se observa que estos
pacientes tienen reacciones positivas a ejercicios y a movimientos pasivos de
sus miembros dañados.
2
Estás han sido diseñadas para que las personas que las utilicen, no corran
ningún tipo de riesgo al realizar los ejercicios en los equipos; además de
permitir una mayor precisión, y control en la ejecución de los ejercicios. Estas
máquinas tienen por objetivo mejorar y ayudar a las personas a lograr los
movimientos por sí solas mediante la repetición de diversos ejercicios;
facilitando de esta manera que retomen sus actividades cotidianas y hagan uso
del correcto funcionamiento de cada parte de su cuerpo.
Figura 1 Rehabilitación de la extremidad superior.
Fuente: (HOCOMA, 2010)
1.2 Justificación
La robótica ha revolucionado en el campo de la medicina en varias
aplicaciones y pese a que muchas de estas se encuentren en investigación
3
hasta el momento, otras se encuentran ya en funcionamiento alrededor del
mundo con resultados eficaces y satisfactorios. Específicamente hablando de la
robótica terapéutica la cual se utiliza en ámbito ambulatorio o domiciliario es la
que provee una rehabilitación acelerada a pacientes que han sufrido
enfermedades o accidentes que les han mermado sus funciones motoras
impidiendo su completa independencia.
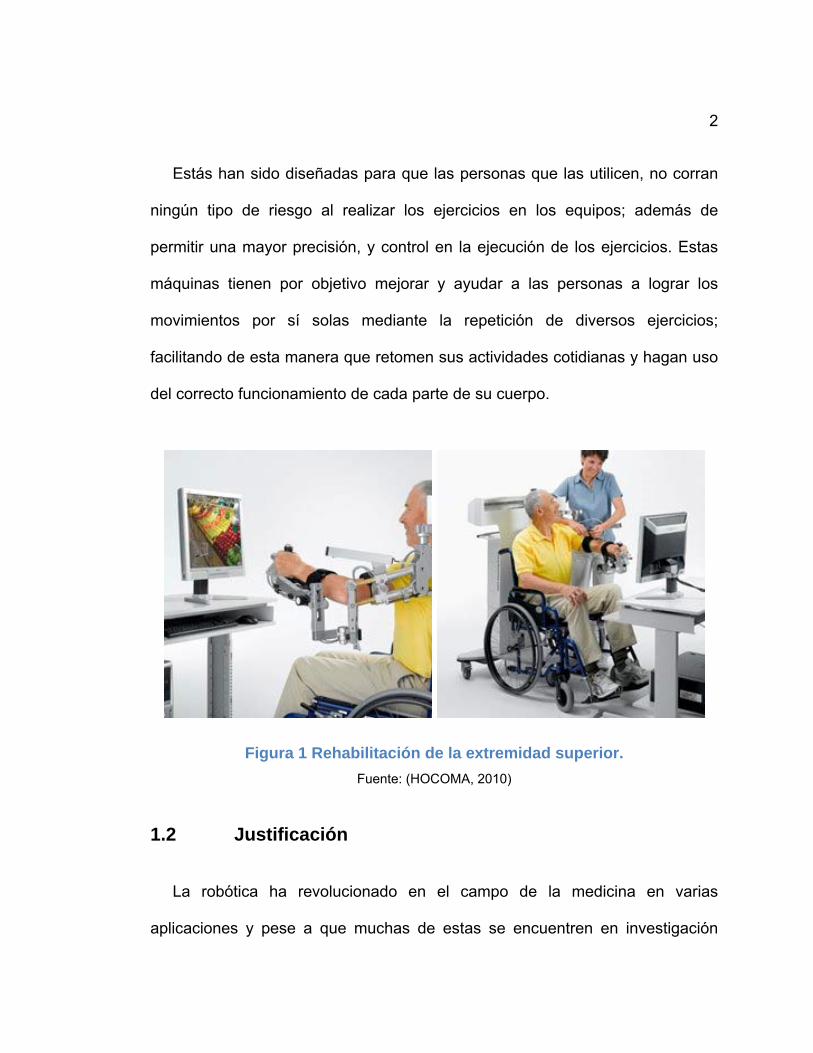
En la actualidad las personas con discapacidad se encuentran en un
proceso de inclusión cada vez mayor por lo que resulta de gran importancia que
puedan ser aptos para diversos trabajos. Considerando que en el Ecuador las
estadísticas dispuestas por el CONADIS indican que las personas con
discapacidad registradas alcanzan los 347374 habitantes, de los cuales existen
168381 personas con discapacidad física; por este factor y el conocimiento de
que la robótica terapéutica puede ayudar significativamente a la mejora de los
movimientos y actividades cotidianas de estas personas, nos hemos visto
impulsadas a ejecutar este proyecto.
Tabla 1 Total de personas registradas en el CONADIS (2012)
TIPO DE DISCAPACIDAD
AUDITIVA FISICA INTELECTUAL LENGUAJE PSICOLOGICO VISUAL TOTAL
TOTAL 41748 168381 78334 4909 13797 40205 347374
Fuente: (CONSEJO NACIONAL DE IGUALDAD DE DISCAPACIDADES, 2013).
4
Tomando en cuenta los factores previamente nombrados queremos lograr
que el presente proyecto ayude y acelere el proceso de mejora del paciente
mediante ejercicios repetitivos y progresivos, pudiendo controlar el tipo de
ejercicio a realizar, el área a ejercitar. Es importante mencionar que el proyecto
no pretende eliminar la presencia del fisioterapeuta en las sesiones de
rehabilitación, sino de permitir una mejora en la movilidad de los pacientes que
se encuentran en rehabilitación. Un aspecto que hemos tomado en cuenta al
proponer el proyecto la dificultad de encontrar este tipo de máquinas de
rehabilitación en el país actualmente debido a su alto costo de importación.
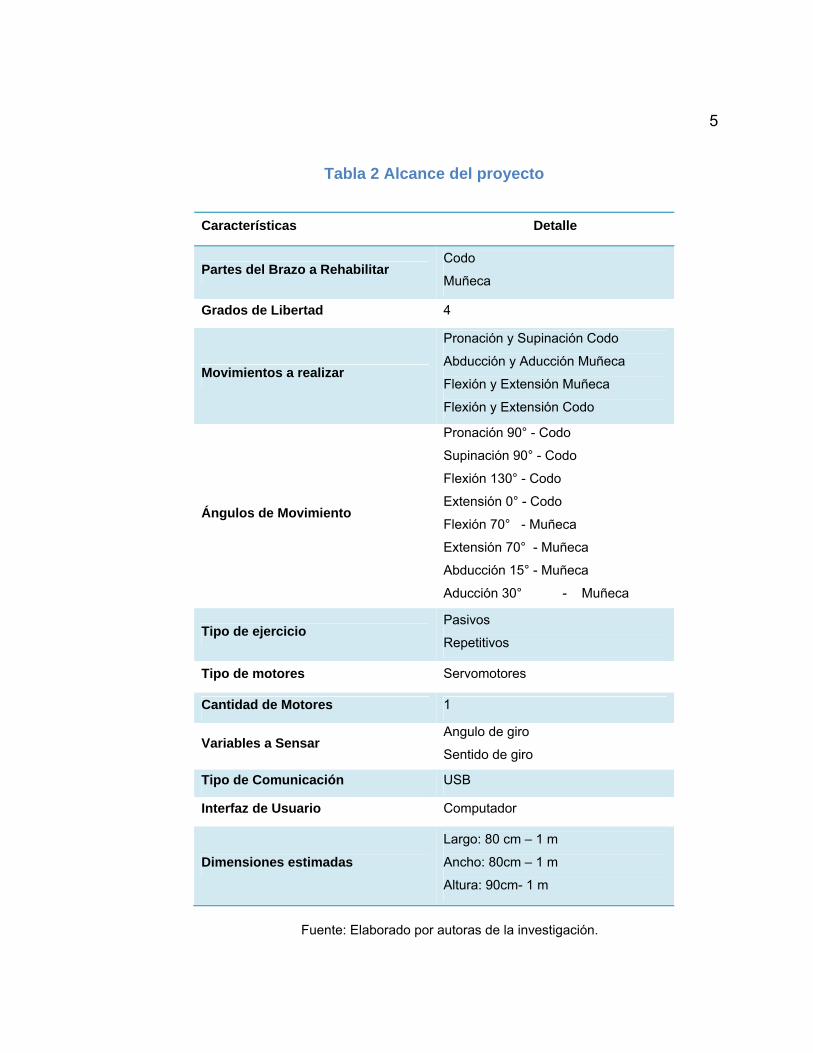
1.3 Alcance del Proyecto
Diseñar, construir e implementar un prototipo automatizado para la
rehabilitación de la extremidad superior de una persona adulta, específicamente
codo y muñeca. Este equipo cumplirá con las características y parámetros
detallados en la Tabla 2.
La rehabilitación está orientada a la recuperación parcial alcanzando la
totalidad de movimiento de las articulaciones pertinentes durante la primera y
segunda fase de rehabilitación considerando el estado inicial del paciente. No
se logrará la tercera fase donde la persona emplea fuerza voluntariamente para
realizar ejercicios.
5
Tabla 2 Alcance del proyecto
Características Detalle
Partes del Brazo a Rehabilitar Codo
Muñeca
Grados de Libertad 4
Movimientos a realizar
Pronación y Supinación Codo
Abducción y Aducción Muñeca
Flexión y Extensión Muñeca
Flexión y Extensión Codo
Ángulos de Movimiento
Pronación 90° - Codo
Supinación 90° - Codo
Flexión 130° - Codo
Extensión 0° - Codo
Flexión 70° - Muñeca
Extensión 70° - Muñeca
Abducción 15° - Muñeca
Aducción 30° - Muñeca
Tipo de ejercicio Pasivos
Repetitivos
Tipo de motores Servomotores
Cantidad de Motores 1
Variables a Sensar Angulo de giro
Sentido de giro
Tipo de Comunicación USB
Interfaz de Usuario Computador
Dimensiones estimadas
Largo: 80 cm – 1 m
Ancho: 80cm – 1 m
Altura: 90cm- 1 m
Fuente: Elaborado por autoras de la investigación.
6
1.4 Objetivos
1.4.1 Objetivo General:
Diseñar e implementar un prototipo funcional controlado por computadora
para la rehabilitación de codo y muñeca, el cual desarrollará una mayor
habilidad en los movimientos de flexión, extensión, aducción, abducción,
pronación y supinación del paciente para su desenvolvimiento en actividades
cotidianas.
1.4.2 Objetivos Específicos:
Profundizar el estudio de la parte de la biomecánica de la extremidad
superior donde intervienen los ángulos y movimientos propios de esta,
con el fin de lograr adaptar y combinar las características del prototipo
con las capacidades del paciente.
Diseñar mecanismos para movimientos repetitivos de flexión, extensión,
pronación, supinación, aducción y abducción para el tratamiento de
rehabilitación de codo y muñeca.
Implementar un prototipo para el tratamiento de rehabilitación de codo y
muñeca utilizando dispositivos, materiales y equipos disponibles en el
mercado al menor costo.
7
Desarrollar un prototipo de rehabilitación que cumpla con los ángulos y
movimientos correspondientes a la biomecánica de la extremidad
superior en un plazo de 10 meses.
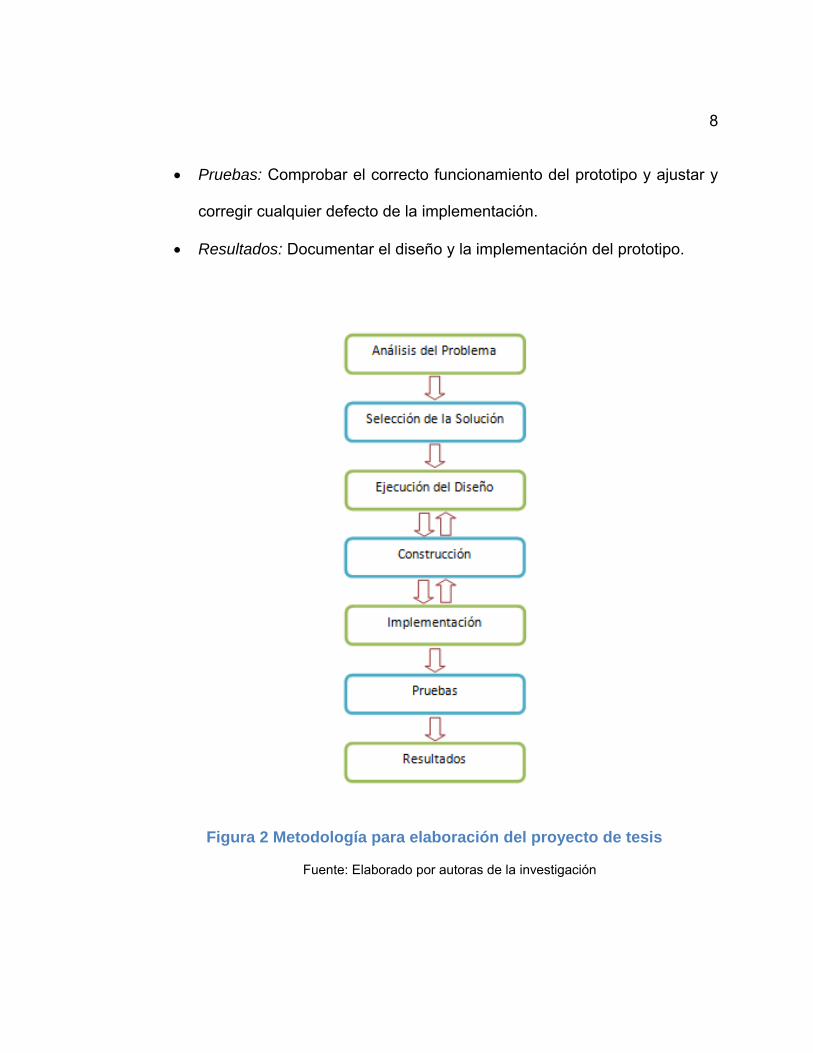
1.5 Metodología
El proyecto de tesis se desarrollará utilizando la metodología expuesta en la
Figura 2 siguiendo sus respectivas etapas de análisis, diseño, implementación y
evaluación.
Análisis del Problema: Planteamiento del problema y análisis de todos
los requerimientos del prototipo, tales como: tamaño, amplitud de
movimientos, ángulos de giro, etc.
Selección de la Solución: Investigar los mecanismos, circuitos eléctricos
y sistemas de control que se adapten a nuestro prototipo, buscar la
mayor cantidad de soluciones posibles, para poder escoger la más eficaz
y factible para el proyecto.
Ejecución del Diseño: Calcular, diseñar y realizar simulaciones del
prototipo tanto en la parte mecánica, como en la eléctrica.
Construcción: Implementar el diseño realizado en la etapa anterior,
basado en planos y programas de simulación.
Implementación: Acoplar los sistemas mecánico, eléctrico y de control
del prototipo.
8
Pruebas: Comprobar el correcto funcionamiento del prototipo y ajustar y
corregir cualquier defecto de la implementación.
Resultados: Documentar el diseño y la implementación del prototipo.
Figura 2 Metodología para elaboración del proyecto de tesis
Fuente: Elaborado por autoras de la investigación
9
2. CAPÍTULO 2
FUNDAMENTO TEÓRICO
2.1 Introducción de la Robótica en la Rehabilitación
La aplicación integrada de un amplio espectro de tecnologías, para el control
de estímulos sensoriales, del movimiento y las fuerzas, tales como la robótica
avanzada, la Mecatrónica, la realidad virtual y los interfaces hombre-máquina,
junto con los recientes hallazgos en biomecánica, en neurología, y en medicina
de rehabilitación con el objetivo de definir nuevos métodos y herramientas para
hacer frente a las crecientes necesidades de rehabilitación de las personas con
discapacidad se denomina Rehabilitación Robótica (Rehabilitación Robótica,
2013).
Enfocándonos en la rehabilitación, se debe mencionar que ésta consiste en
un conjunto o serie de procedimientos con el fin de ayudar al paciente a
alcanzar su potencial físico de acuerdo con su deficiencia fisiológica o
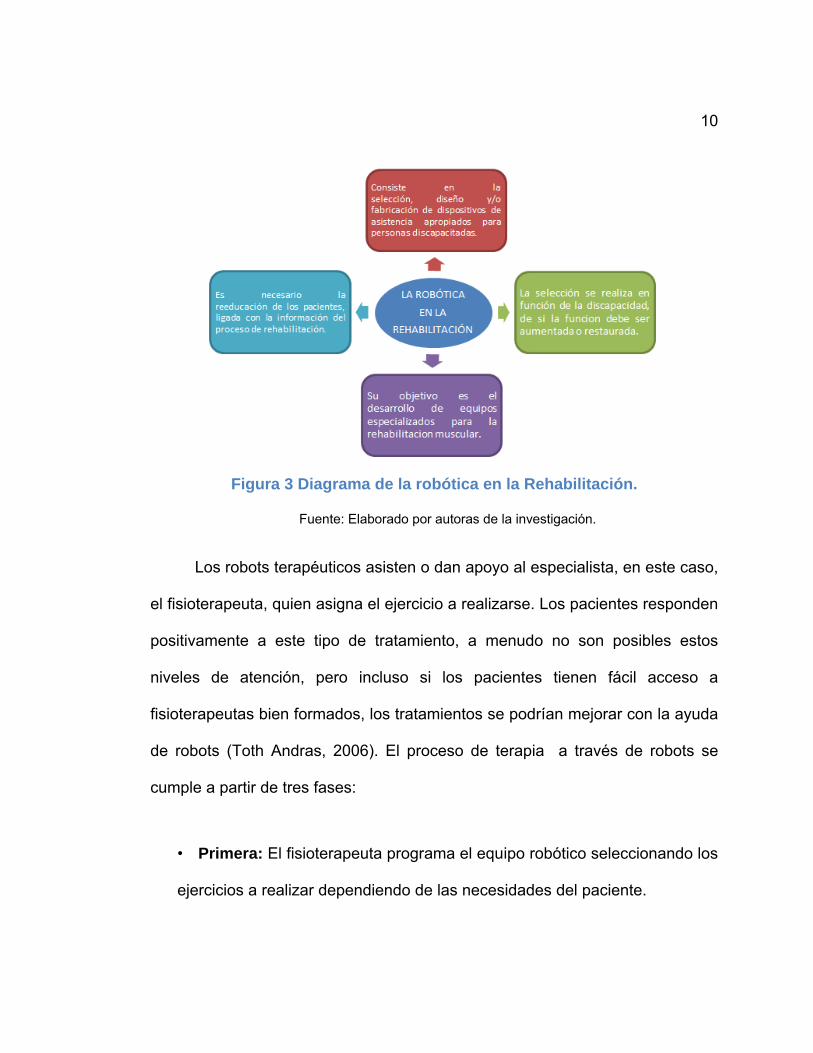
anatómica. La robótica de rehabilitación considera en el diseño de sus equipos
la deficiencia del paciente para lograr su mejoramiento muscular.
10
Figura 3 Diagrama de la robótica en la Rehabilitación.
Fuente: Elaborado por autoras de la investigación.
Los robots terapéuticos asisten o dan apoyo al especialista, en este caso,
el fisioterapeuta, quien asigna el ejercicio a realizarse. Los pacientes responden
positivamente a este tipo de tratamiento, a menudo no son posibles estos
niveles de atención, pero incluso si los pacientes tienen fácil acceso a
fisioterapeutas bien formados, los tratamientos se podrían mejorar con la ayuda
de robots (Toth Andras, 2006). El proceso de terapia a través de robots se
cumple a partir de tres fases:
• Primera: El fisioterapeuta programa el equipo robótico seleccionando los
ejercicios a realizar dependiendo de las necesidades del paciente.
11
• Segunda: Se analiza el avance o el estado actual del paciente y se
reestructura el programa terapéutico.
• Tercero: Por último, se ejecuta el programa, mediante el robot o sistema
terapéutico, permitiendo al fisioterapeuta tener el control del procedimiento
en todo momento.
Existen algunos ensayos clínicos de los sistemas terapéuticos robóticos
donde indican que la fisioterapia robótica es segura y fiable, que los pacientes
no tienen miedo a los robots y que para los fisiatras es simple el aprendizaje de
manejo del sistema. Los ejercicios robóticos son tan eficientes y relajantes
como la tradicional fisioterapia hecha por el especialista en persona, sin
embargo, los tratamientos robóticos han mostrado una mejora más significativa
en los pacientes.
2.2 Conceptos Básicos
2.2.1 Diseño de Máquinas
El diseño de máquinas se encarga de la creación de maquinaría que
funcione de forma segura y confiable, además define y calcula movimientos,
fuerzas y cambios de energía con la finalidad de determinar el tamaño, la forma
y el material de cada elemento. Las máquinas están formadas de elementos
que tienen una interrelación específica para lograr los distintos movimientos y
12
fuerzas necesarios. Para el diseño, se consideran fuerzas estáticas, análisis de
cargas dinámicas asociadas al movimiento, masa y geometría de cada uno de
sus componentes.
2.2.2 Prototipo
Un prototipo es el primer modelo que sirve como modelo experimental de un
producto, el cual está dispuesto a pruebas con situaciones reales necesarias
para su posterior mejora en el desarrollo del producto. El objetivo del prototipo
es llegar a cumplir con los requerimientos propuestos en el producto, ya que
este debe funcionar y evolucionar a través de las correcciones realizadas en las
pruebas, generando calidad y eficiencia en el producto final.
2.2.2.1 Tipos de Prototipos
Prototipo no funcional: Sirve únicamente para probar algunos aspectos
de diseño.
Primer prototipo de una serie: Es el modelo de muestra y de prueba, en
el que se realiza la experimentación para comprobar su funcionalidad y
cumplimiento de requisitos propuestos.
Prototipo de características seleccionadas: Modelo que tiene ciertas
características parecidas a las que conservará el sistema final.
13
2.2.3 Validación de Prototipos
Para la validación del prototipo se considera el usuario quien prueba el
prototipo y se informa las correcciones que deban efectuarse. Para dicha
validación, las correcciones pueden ser de tres tipos:
Errores de programación: La programación del sistema deberá ser
corregida para mejorar la funcionalidad del sistema.
Errores de diseño: En ocasiones, al momento de realizar las pruebas
pueden aparecer problemas debido a la implementación del prototipo, en
este caso, pueden haber las opciones de comenzar nuevamente el
diseño para corregir errores o realizar el análisis, la corrección y una
validación del diseño que se incluya en una nueva fase del prototipo, es
decir, Prototipo No.2.
Funcionalidad faltante: Se debe indicar que funciones deben agregarse
en el Prototipo No.2 y las razones de no estar presentes en el Prototipo
No.1.
2.2.4 Transferencia de Tecnología de Prototipo/ Máquina
Proceso a través del cual se transfiere una investigación o desarrollo
tecnológico a una entidad del sector productivo, con la finalidad de que esta
14
adquiera ventajas competitivas y llegue al mercado como un producto, proceso
o servicio novedoso, impulsando el desarrollo y crecimiento de los diversos
sectores de la sociedad mediante el acceso al conocimiento y experiencia de
los grupos de investigación.
2.2.5 Fases de Rehabilitación:
2.2.5.1 Primera Fase de Rehabilitación:
El paciente tiene su brazo o articulaciones inflamadas, con una pérdida de
movilidad. Como parte de la primera fase de rehabilitación se incluyen
compresas calientes, ultrasonido, parafina y unos primeros movimientos.
2.2.5.2 Segunda Fase de Rehabilitación:
Dentro de la segunda fase la extremidad superior del paciente está
desinflamada y existe una mayor movilidad. El objetivo de esta fase es llegar a
la movilidad completa de las articulaciones.
2.2.5.3 Tercera Fase de Rehabilitación:
En esta etapa de rehabilitación el paciente tiene una movilidad completa y se
inicia con ejercicios que implican fuerza voluntaria por parte del paciente de
manera que al culminar la presente fase se consiga que las actividades
posteriores a la rehabilitación sean normales y cotidianas sin problemas ni dolor
para el paciente.
15
2.2.6 Tipos de Movimientos en Rehabilitación:
2.2.6.1 Movimientos Pasivos
Movimiento que se ejecuta mediante la acción de una fuerza externa, sin
que la persona intervenga activamente oponiendo resistencia. Son utilizados
cuando las condiciones psicofísicas del paciente se encuentran afectadas, en
ciertas condiciones patológicas o de grave deterioro, este método puede
representar la única posibilidad de movilización de la parte afectada del
paciente.
2.2.6.2 Movimientos Activos
Son los ejecutados mediante la voluntad del paciente, tienen por objetivo
mantener la funcionalidad motora o restablecer funciones de movimiento
deterioradas por alguna enfermedad.
2.2.6.3 Movimientos Activo – Asistidos
Los hace el paciente con asistencia del kinesiólogo.
2.2.6.4 Movimiento Resistido
Lo ejecuta el paciente pero contra una resistencia que le ofrece una fuerza
externa.
16
2.3 Estado del Arte en Robots para rehabilitación en
Terapia Ocupacional
2.3.1 Terapia Ocupacional
La investigación tecnológica y sus aplicaciones clínicas relacionadas con el
uso de dispositivos robóticos para mejorar la marcha es un campo más
desarrollado, en terapia ocupacional, las aplicaciones de la terapia asistida por
robots se centran más en el tratamiento del miembro superior (Polonio &
Romero, 2010).
La robótica debe utilizarse conjuntamente con otras técnicas ocupacionales
y no de manera alternativa y única pues es necesaria la preparación del
paciente a los movimientos que va a efectuar, el entrenamiento conjunto con el
robot y la posterior actividad de los pacientes en su vida cotidiana. Por esta
razón, la terapia ocupacional tradicional debe ir profundamente ligada con la
robótica. Pese a que el periodo de recuperación no se disminuye con la
presencia de robots terapéuticos de rehabilitación, su importancia radica en la
motivación de los pacientes para realizar el tratamiento.
Actualmente se ha demostrado que la combinación de la rehabilitación
estándar y la terapia robótica ayuda significativamente en la rehabilitación de un
paciente que ha sufrido un derrame. Específicamente hablando del dispositivo
robótico ReoGo, el cual ayuda a este tipo de pacientes utilizando movimientos
17
repetitivos de los hombros, brazos y codos logrando aumentar las funciones del
hombro y del brazo afectado (NEUROAID, 2012).
También encontramos el robot Ursus, este presenta una forma de peluche
que ayuda a niños discapacitados o con problemas de movilidad en sus
miembros superiores. Este robot ayuda a los niños en el proceso de
rehabilitación enseñándoles a realizar movimientos con sus codos, hombros, y
muñecas mediante la imitación. Con la ayuda del fisioterapeuta a cargo, el niño
interactúa también con un videojuego para su rehabilitación
(MEDULARDIGITAL, 2011).
Un robot terapéutico que también incluye un juego virtual es RoboTerapist
3D en el cual el paciente debe cumplir a través de este juego con actividades
cotidianas como comer, beber, peinarse, coger un vaso; motivando al paciente
a realizar el ejercicio. Cada sesión de rehabilitación con este robot es de
aproximadamente 45 minutos siendo supervisado por el fisioterapeuta. Este
robot ha demostrado que los pacientes que lo han utilizado han presentado una
mejora considerable de su extremidad superior durante la rehabilitación
(Fernandez, 2010).
18
2.4 Biomecánica del Miembro Superior
2.4.1 Introducción
La biomecánica es una disciplina científica que estudia las estructuras de
carácter mecánico; tales como, modelos, fenómenos y leyes que sean
relevantes en el movimiento (incluyendo el estático) de los seres vivos,
fundamentalmente del cuerpo humano. Esta área de conocimiento se apoya en
diversas ciencias biomédicas, utilizando los conocimientos de la mecánica, la
ingeniería, la anatomía, la fisiología y otras disciplinas, para estudiar el
comportamiento del cuerpo humano y resolver los problemas derivados de las
diversas condiciones a las que puede verse sometido (Biomecánica, 2013).
La biomecánica ha tenido un gran desarrollo en relación con aplicaciones de
la ingeniería, informática y de modelos matemáticos, para el conocimiento de
los sistemas biológicos y de partes del cuerpo humano, facilitando su aplicación
práctica y su utilización como nuevos métodos de valoración y diagnóstico.
Los campos de aplicación de la Biomecánica son diversos:
Biomecánica Clínica: Su finalidad es la de evaluar funcionalmente las
patologías presentes en el paciente con el objetivo de repararlas
independientemente del campo terapéutico con el que se lo debe tratar.
19
Biomecánica Deportiva: El objetivo de la biomecánica deportiva es
analizar la mecánica de los deportes para mejorar, y en muchos casos,
optimizar el rendimiento y desempeño de los atletas, evitando
posteriores lesiones.
Biomecánica Ocupacional: Se enfoca en la relación que tiene el cuerpo
humano con las actividades y movimientos laborales y de su propia
naturaleza; tiene estricta relación con la ingeniería ergonómica.
2.4.2 Planimetría
Para entender la planimetría del cuerpo humano se debe tener conocimiento
sobre la posición neutra o posición cero, es una posición humana de referencia
que se adopta como punto de inicio para realizar la medición goniométrica1.
La planimetría es la descripción de los planos imaginarios que sirven de
referencia para dividir el cuerpo humano en diferentes zonas y facilitar su
estudio.
En el cuerpo humano, se reconocen tres planos perpendiculares entre sí:
plano sagital, plano frontal o coronal y plano transversal o axial. Cada uno de
estos planos son cruzados perpendicularmente por un eje, sobre los cuales se
1 Goniometría: En Rehabilitación, se utiliza para determinar el punto de inicio de un tratamiento, evaluar su progresión, establecer un pronóstico, modificar el tratamiento o darle un punto final. Además determina los ángulos de desplazamiento y rotación del cuerpo humano.
20
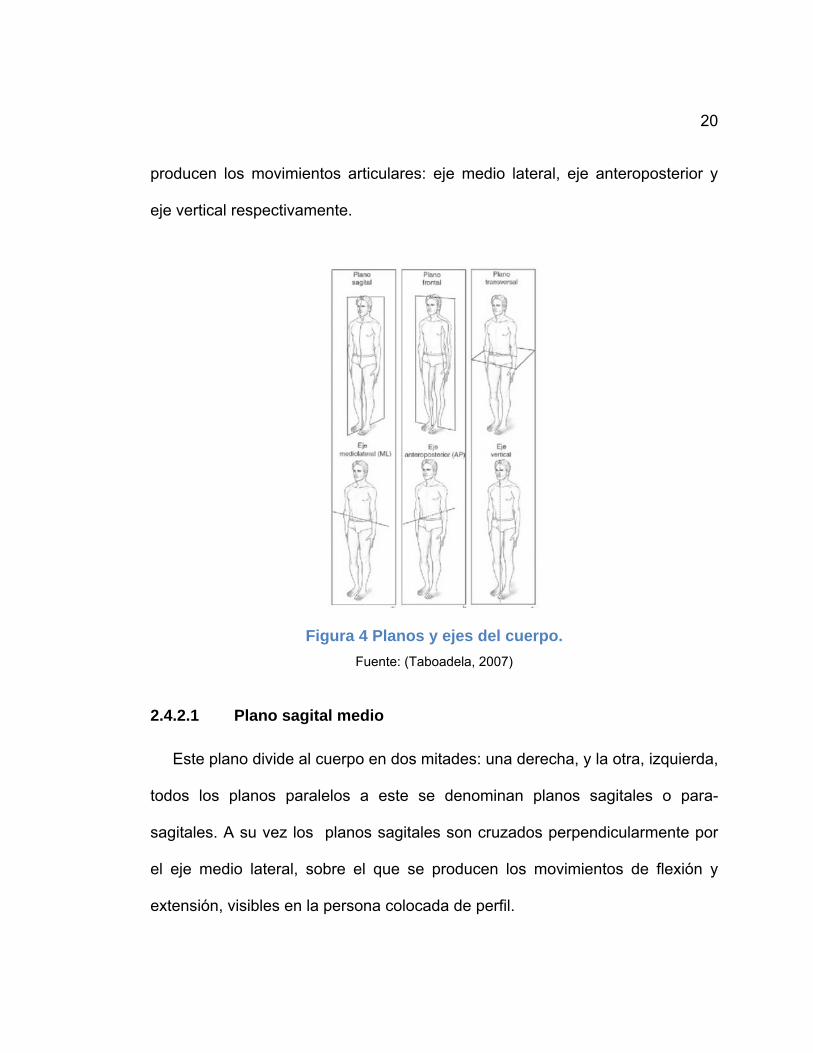
producen los movimientos articulares: eje medio lateral, eje anteroposterior y
eje vertical respectivamente.
Figura 4 Planos y ejes del cuerpo.
Fuente: (Taboadela, 2007)
2.4.2.1 Plano sagital medio
Este plano divide al cuerpo en dos mitades: una derecha, y la otra, izquierda,
todos los planos paralelos a este se denominan planos sagitales o para-
sagitales. A su vez los planos sagitales son cruzados perpendicularmente por
el eje medio lateral, sobre el que se producen los movimientos de flexión y
extensión, visibles en la persona colocada de perfil.
21
2.4.2.2 Plano frontal o coronal
Este plano es perpendicular a cualquiera de los planos sagital, el mismo que
dividen al cuerpo en dos partes, una anterior y otra posterior. Lo cruza
perpendicularmente el eje anteroposterior sobre el cual se producen los
movimientos de abducción y aducción, visibles en la persona colocada de
frente.
2.4.2.3 Plano transversal u horizontal
Este plano es perpendicular a cualquiera de los planos perpendiculares a los
planos medio y coronal que dividen al cuerpo en dos partes: una craneal o
superior y otra caudal o inferior. Lo cruza perpendicularmente el eje vertical,
sobre el cual se producen los movimientos de rotación que son vistos desde
arriba o desde abajo.
2.4.3 Rango de movimiento y Ángulos del Miembro Superior
Humano
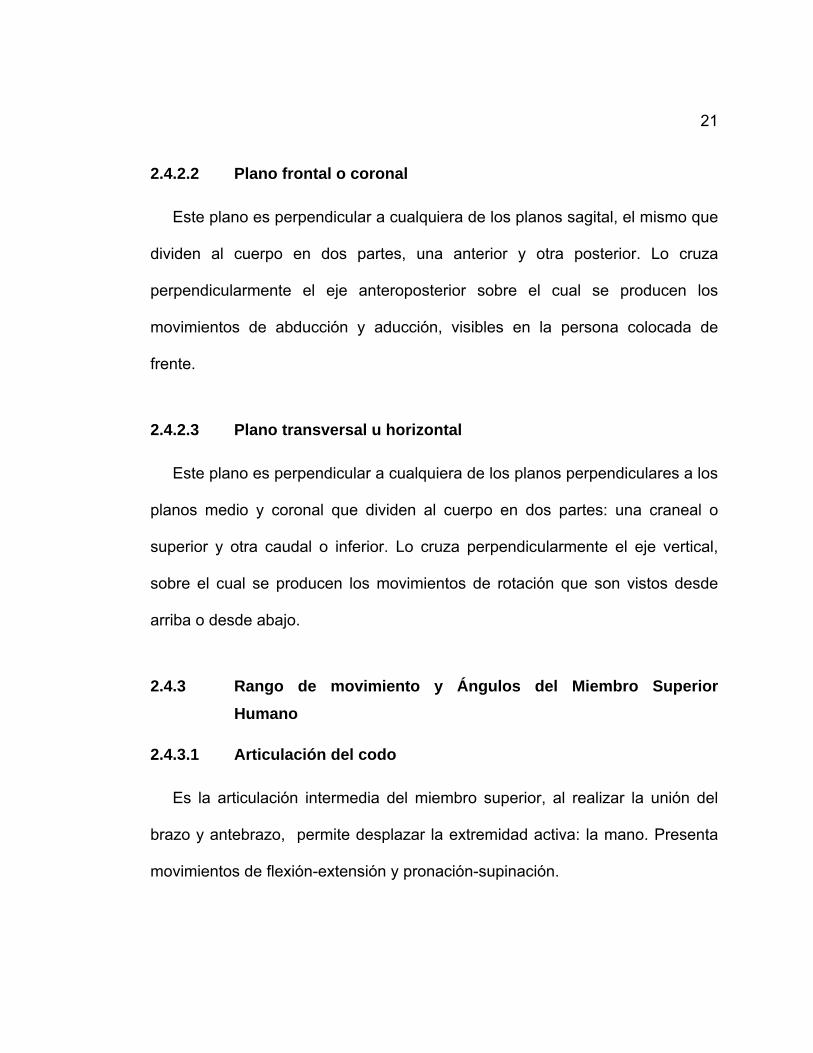
2.4.3.1 Articulación del codo
Es la articulación intermedia del miembro superior, al realizar la unión del
brazo y antebrazo, permite desplazar la extremidad activa: la mano. Presenta
movimientos de flexión-extensión y pronación-supinación.
22
Figura 5 Articulación del codo.
Fuente: (Taboadela, 2007).
2.4.3.1.1 Analogía Mecánica:
El codo es una articulación tipo bisagra - pivot. El tipo bisagra permite
realizar los movimientos de flexión y extensión, a su vez el tipo pivot los
movimientos de pronación y supinación.
2.4.3.1.2 Movimientos de Flexión-Extensión:
Movimiento: Se procede a efectuar la flexión y la extensión del codo. Se
debe tener en cuenta que en sujetos normales la extensión activa del
codo es 0°. En algunas personas laxas, la extensión pasiva puede llegar
hasta10°
23
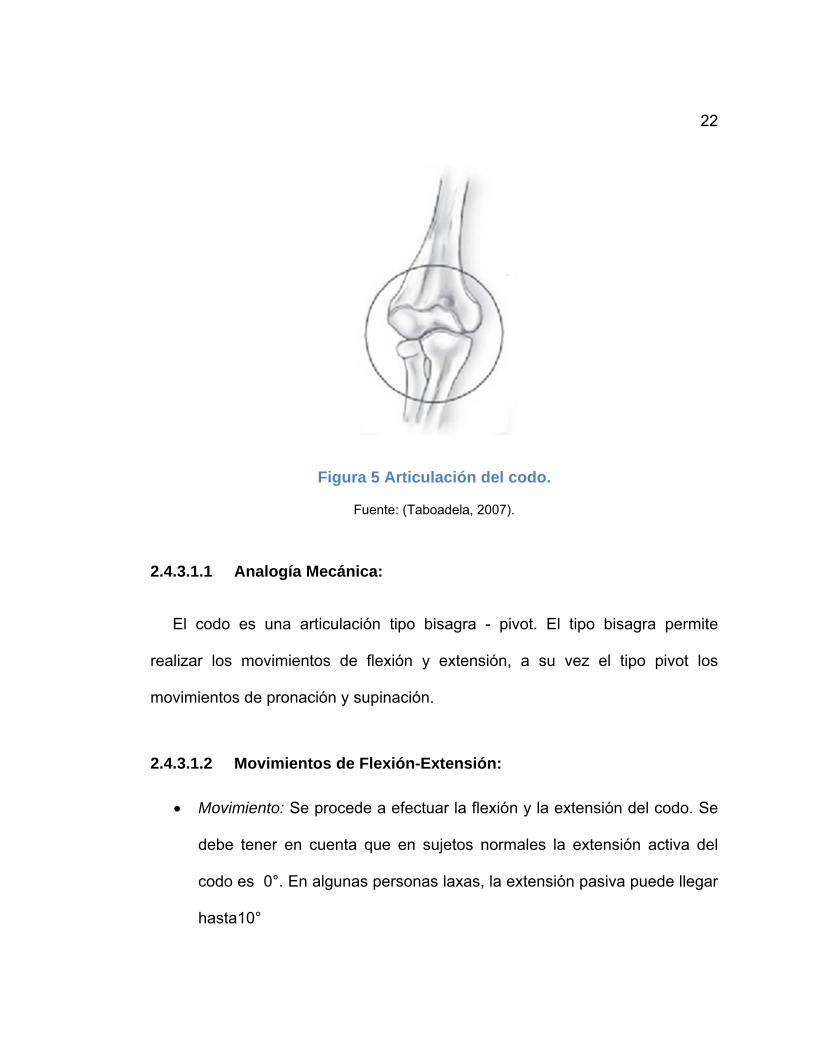
Registro: Se registra el ángulo formado entre la posición 0 y la posición
final de flexión y extensión.
Valores normales: Flexión 0-150° y extensión: 0° (personas laxas 0-10°).
Figura 6 Movimientos de flexión y extensión del codo.
Fuente: (Taboadela, 2007).
2.4.3.1.3 Movimientos de Pronación-supinación:
La pronosupinación es el movimiento de rotación del antebrazo en torno al
eje longitudinal. Este movimiento se da mediante la intervención de dos
articulaciones mecánicamente unidas. Participan las articulaciones radio cubital
inferior y superior. Esta rotación le da al complejo de la muñeca un tercer grado
de libertad
24
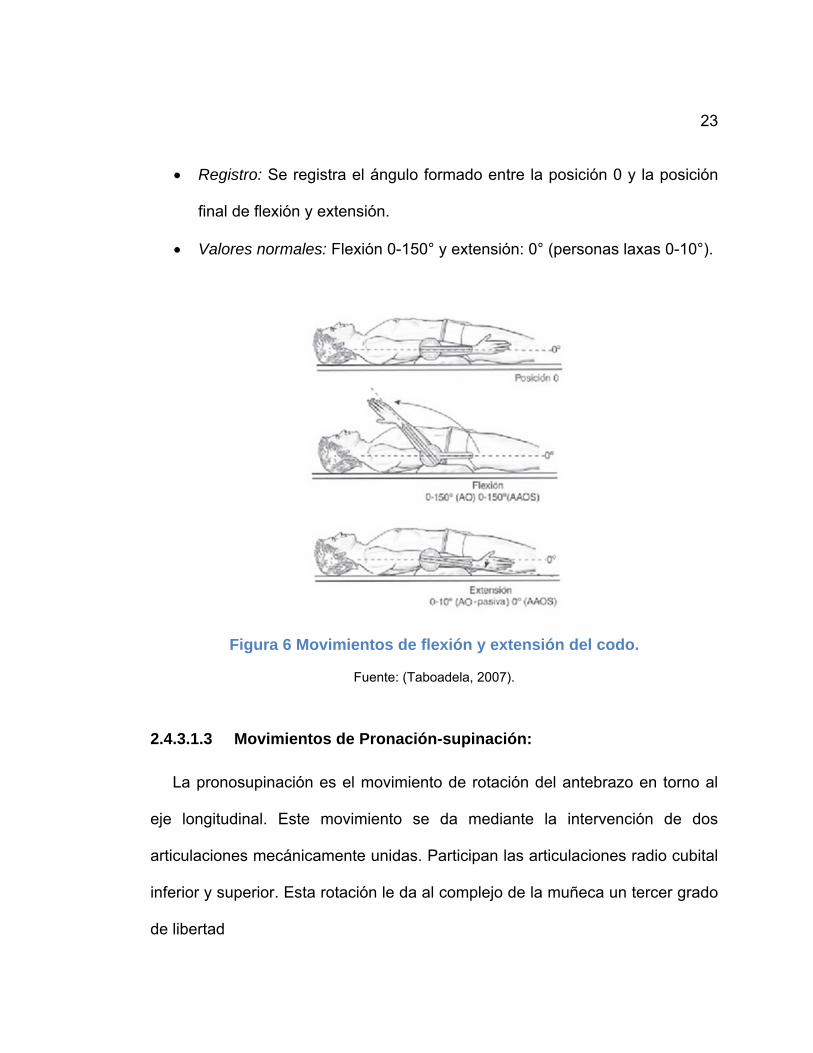
Posición: Paciente sentado, hombro en posición 0; codo flexionado en
90° para evitar la rotación del hombro; el antebrazo y muñeca en
posición 0.
Registro: Se registra el ángulo formado entre la posición 0 y la posición
final de pronación y supinación.
Valores normales: Supinación: 0-90° y pronación: 0-90°.
Figura 7 Movimientos de supinación y pronación del codo.
Fuente: (Taboadela, 2007)
2.4.3.2 Articulación de la muñeca
Presenta movimientos de flexión-extensión y desviación radial-cubital.
25
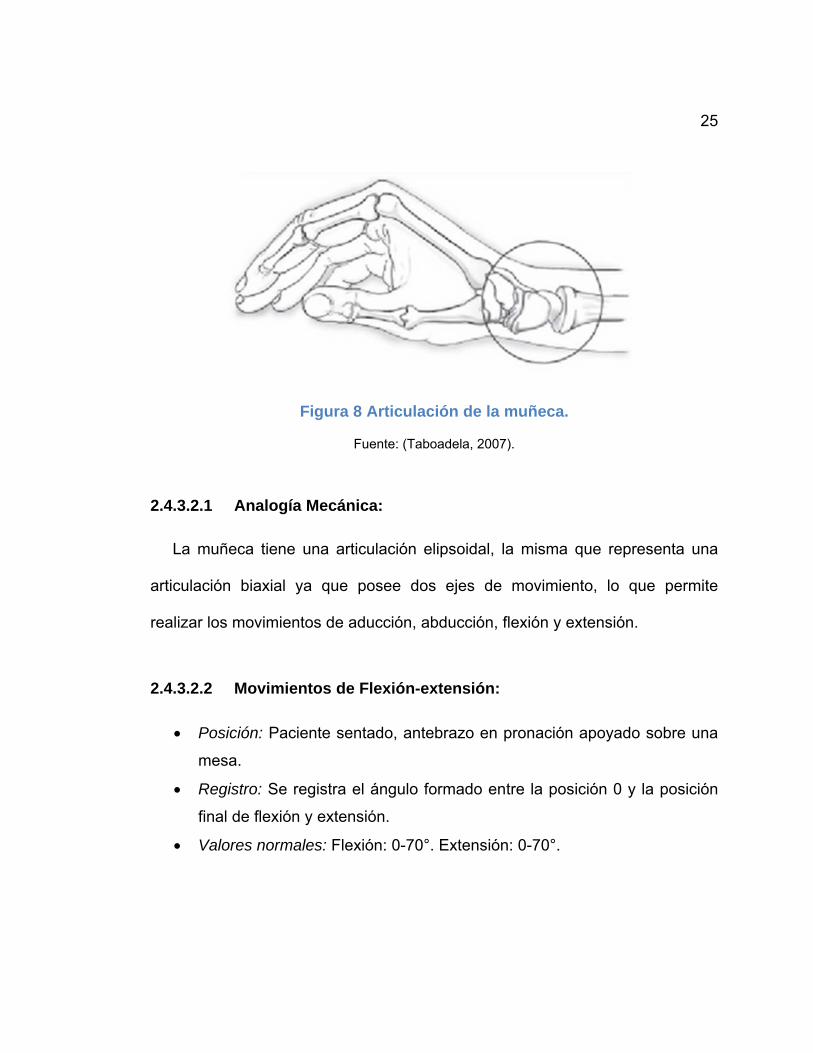
Figura 8 Articulación de la muñeca.
Fuente: (Taboadela, 2007).
2.4.3.2.1 Analogía Mecánica:
La muñeca tiene una articulación elipsoidal, la misma que representa una
articulación biaxial ya que posee dos ejes de movimiento, lo que permite
realizar los movimientos de aducción, abducción, flexión y extensión.
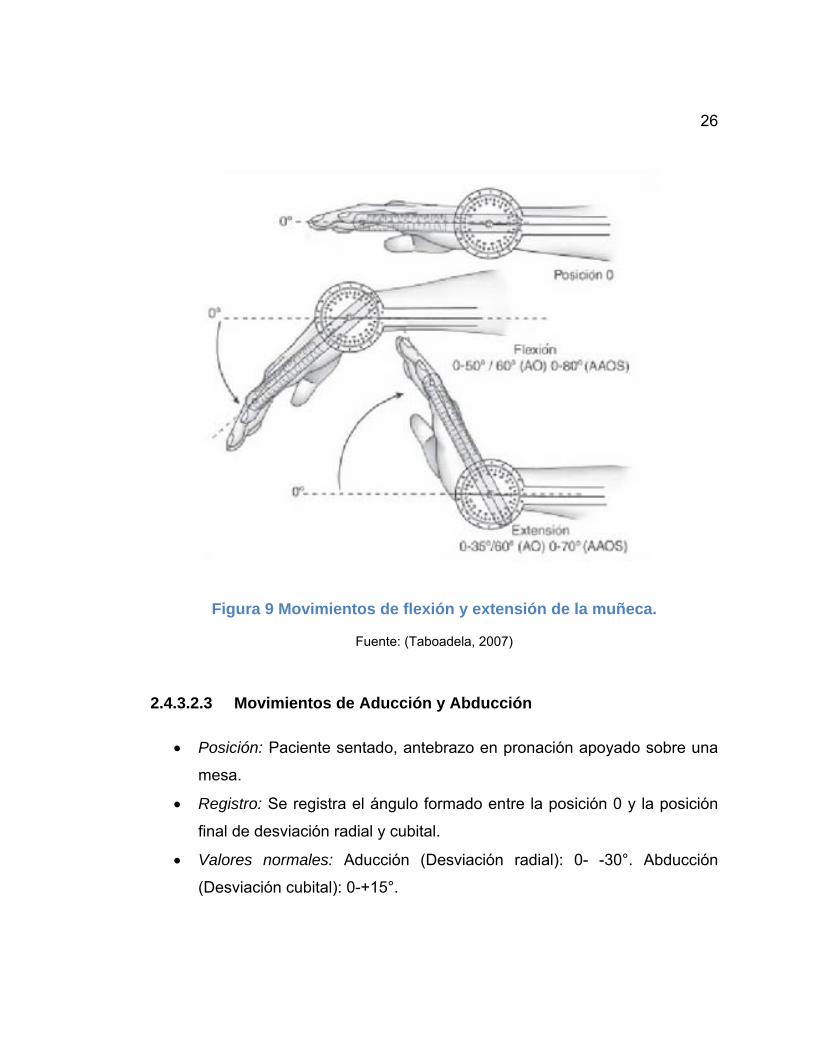
2.4.3.2.2 Movimientos de Flexión-extensión:
Posición: Paciente sentado, antebrazo en pronación apoyado sobre una
mesa.
Registro: Se registra el ángulo formado entre la posición 0 y la posición
final de flexión y extensión.
Valores normales: Flexión: 0-70°. Extensión: 0-70°.
26
Figura 9 Movimientos de flexión y extensión de la muñeca.
Fuente: (Taboadela, 2007)
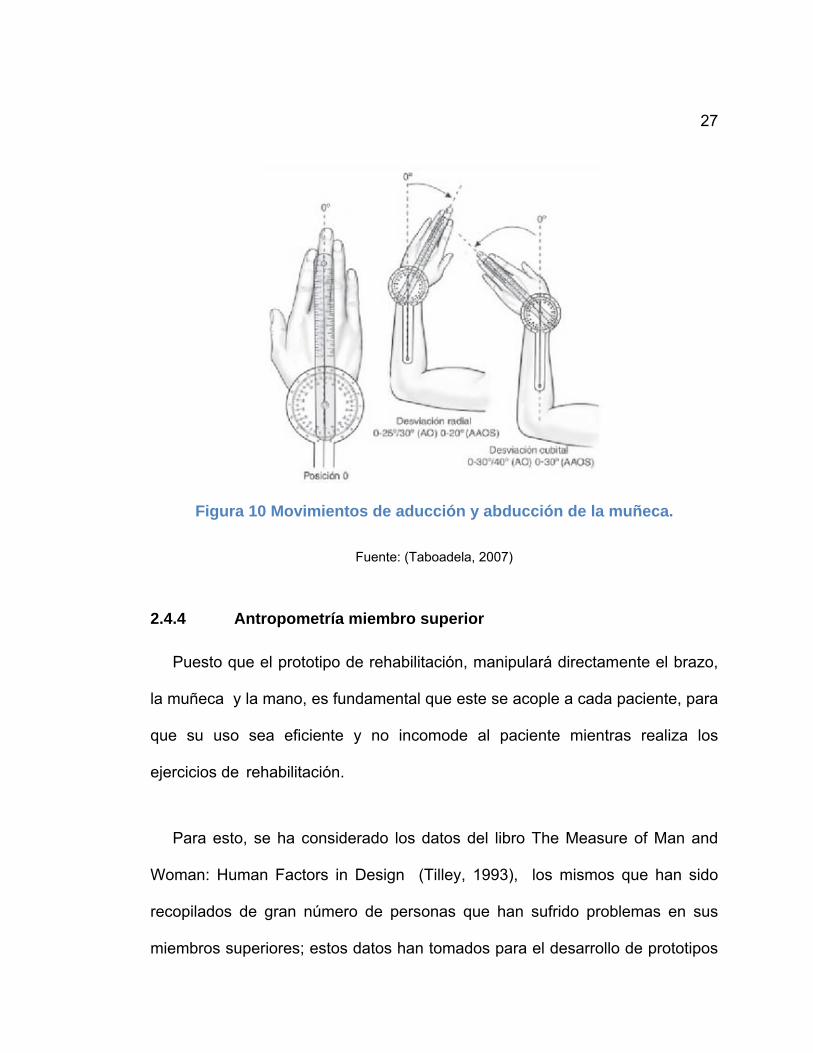
2.4.3.2.3 Movimientos de Aducción y Abducción
Posición: Paciente sentado, antebrazo en pronación apoyado sobre una
mesa.
Registro: Se registra el ángulo formado entre la posición 0 y la posición
final de desviación radial y cubital.
Valores normales: Aducción (Desviación radial): 0- -30°. Abducción
(Desviación cubital): 0-+15°.
27
Figura 10 Movimientos de aducción y abducción de la muñeca.
Fuente: (Taboadela, 2007)
2.4.4 Antropometría miembro superior
Puesto que el prototipo de rehabilitación, manipulará directamente el brazo,
la muñeca y la mano, es fundamental que este se acople a cada paciente, para
que su uso sea eficiente y no incomode al paciente mientras realiza los
ejercicios de rehabilitación.
Para esto, se ha considerado los datos del libro The Measure of Man and
Woman: Human Factors in Design (Tilley, 1993), los mismos que han sido
recopilados de gran número de personas que han sufrido problemas en sus
miembros superiores; estos datos han tomados para el desarrollo de prototipos
28
y máquinas de rehabilitación del miembro superior que han sido
comercializados.
Para una mejor compresión de la Tabla 3 que detalla las dimensiones del
brazo humano, debemos mencionar que el percentil 1% representa al valor
mínimo de las mediciones, 50% el promedio y el 99% al valor máximo de las
medidas de la población adulta.
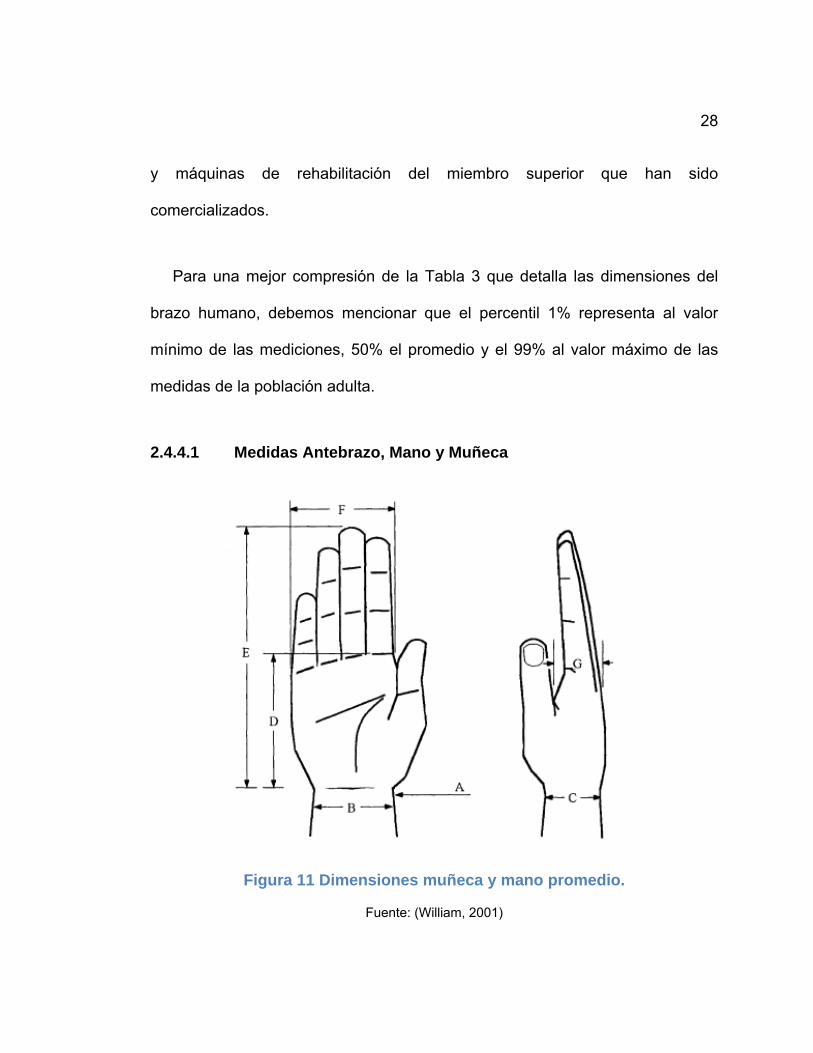
2.4.4.1 Medidas Antebrazo, Mano y Muñeca
Figura 11 Dimensiones muñeca y mano promedio.
Fuente: (William, 2001)
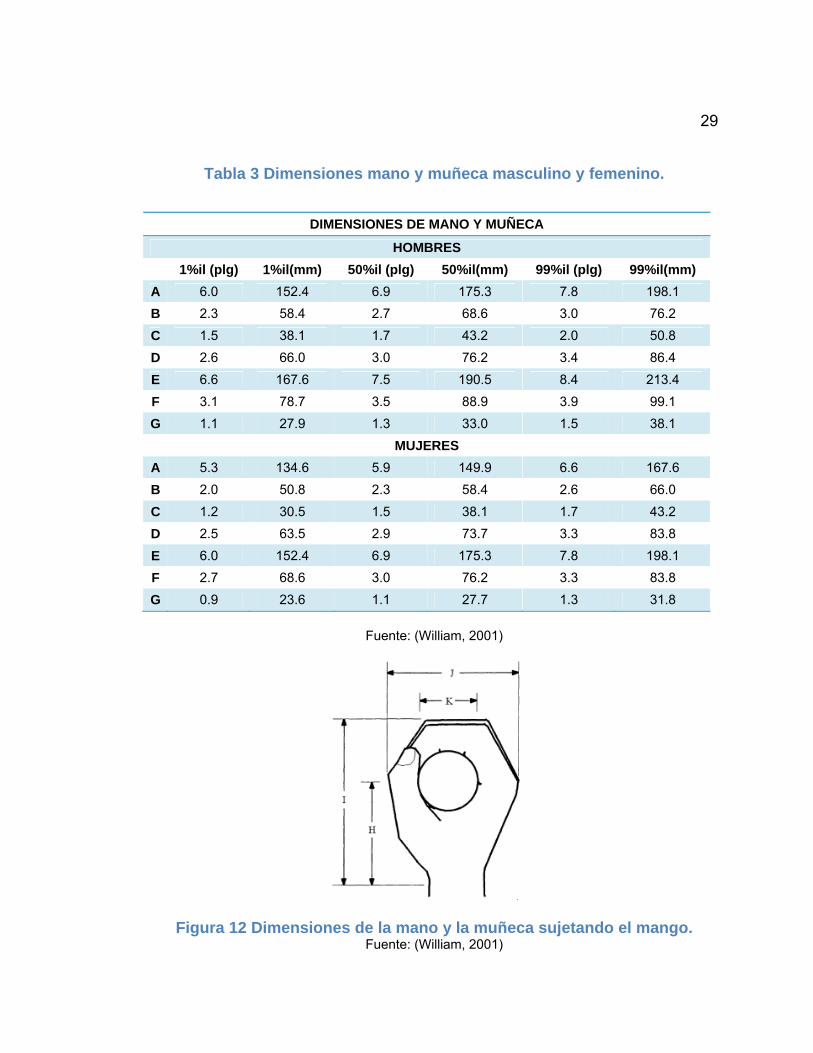
29
Tabla 3 Dimensiones mano y muñeca masculino y femenino.
DIMENSIONES DE MANO Y MUÑECA
HOMBRES
1%il (plg) 1%il(mm) 50%il (plg) 50%il(mm) 99%il (plg) 99%il(mm)
A 6.0 152.4 6.9 175.3 7.8 198.1
B 2.3 58.4 2.7 68.6 3.0 76.2
C 1.5 38.1 1.7 43.2 2.0 50.8
D 2.6 66.0 3.0 76.2 3.4 86.4
E 6.6 167.6 7.5 190.5 8.4 213.4
F 3.1 78.7 3.5 88.9 3.9 99.1
G 1.1 27.9 1.3 33.0 1.5 38.1
MUJERES
A 5.3 134.6 5.9 149.9 6.6 167.6
B 2.0 50.8 2.3 58.4 2.6 66.0
C 1.2 30.5 1.5 38.1 1.7 43.2
D 2.5 63.5 2.9 73.7 3.3 83.8
E 6.0 152.4 6.9 175.3 7.8 198.1
F 2.7 68.6 3.0 76.2 3.3 83.8
G 0.9 23.6 1.1 27.7 1.3 31.8
Fuente: (William, 2001)
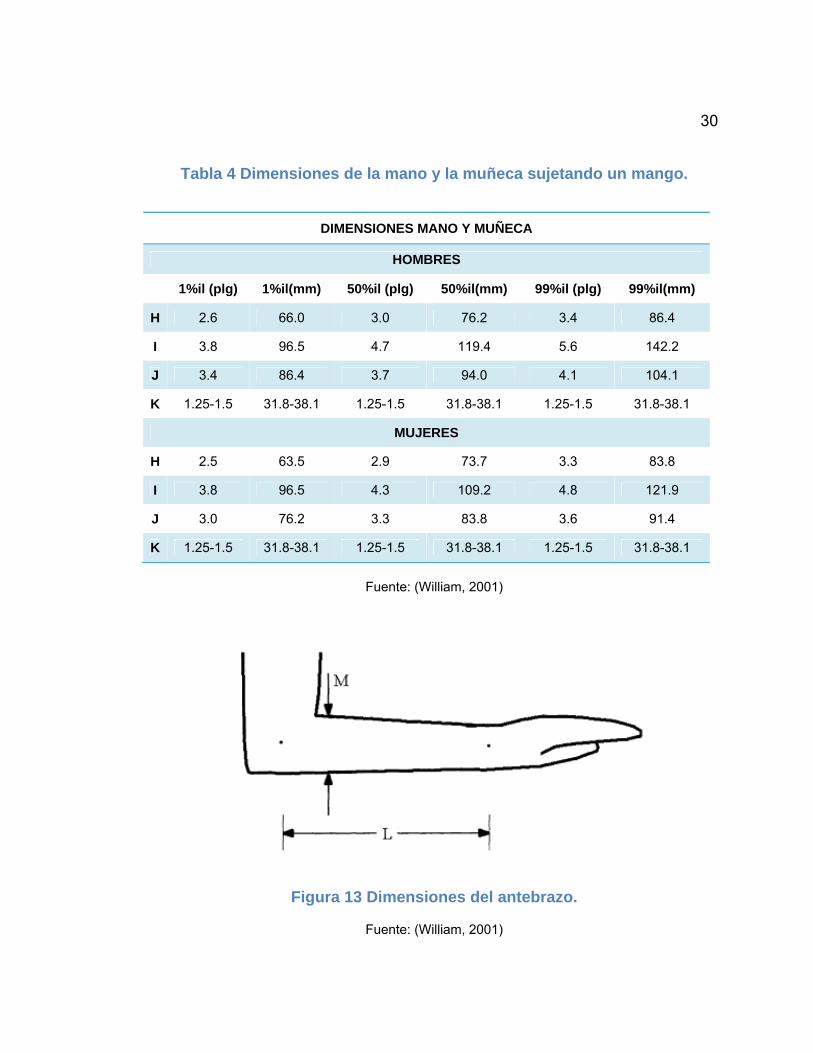
Figura 12 Dimensiones de la mano y la muñeca sujetando el mango. Fuente: (William, 2001)
30
Tabla 4 Dimensiones de la mano y la muñeca sujetando un mango.
DIMENSIONES MANO Y MUÑECA
HOMBRES
1%il (plg) 1%il(mm) 50%il (plg) 50%il(mm) 99%il (plg) 99%il(mm)
H 2.6 66.0 3.0 76.2 3.4 86.4
I 3.8 96.5 4.7 119.4 5.6 142.2
J 3.4 86.4 3.7 94.0 4.1 104.1
K 1.25-1.5 31.8-38.1 1.25-1.5 31.8-38.1 1.25-1.5 31.8-38.1
MUJERES
H 2.5 63.5 2.9 73.7 3.3 83.8
I 3.8 96.5 4.3 109.2 4.8 121.9
J 3.0 76.2 3.3 83.8 3.6 91.4
K 1.25-1.5 31.8-38.1 1.25-1.5 31.8-38.1 1.25-1.5 31.8-38.1
Fuente: (William, 2001)
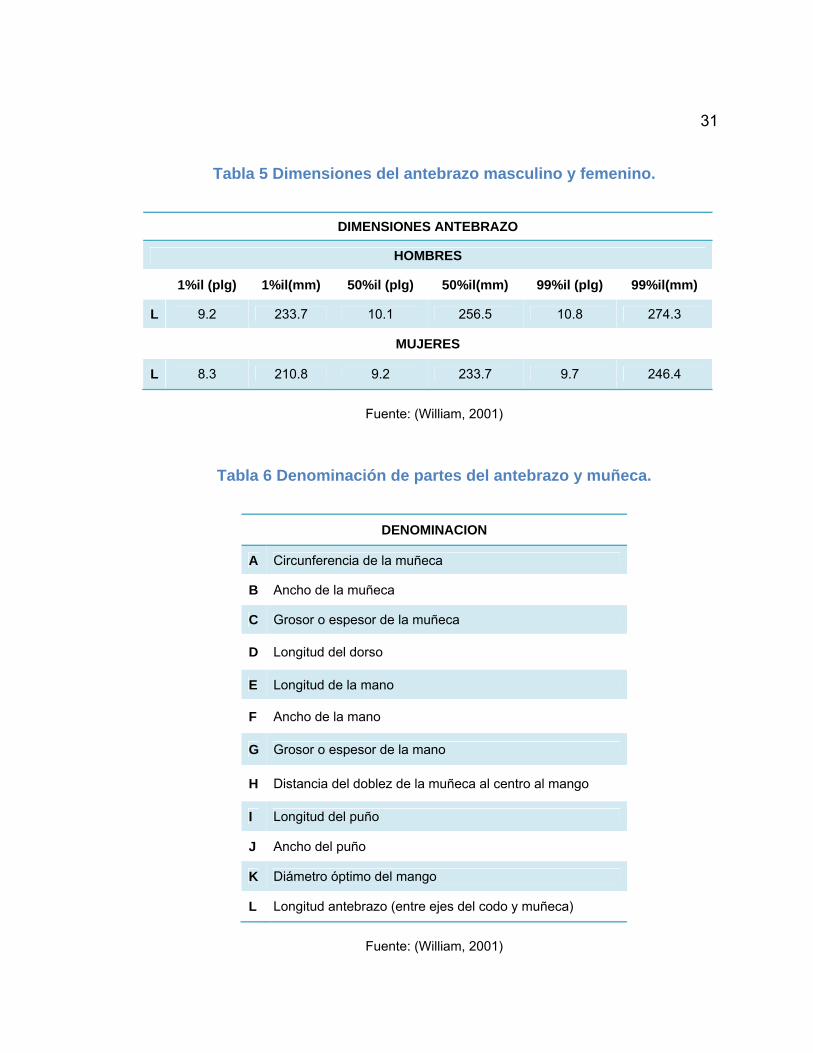
Figura 13 Dimensiones del antebrazo.
Fuente: (William, 2001)
31
Tabla 5 Dimensiones del antebrazo masculino y femenino.
DIMENSIONES ANTEBRAZO
HOMBRES
1%il (plg) 1%il(mm) 50%il (plg) 50%il(mm) 99%il (plg) 99%il(mm)
L 9.2 233.7 10.1 256.5 10.8 274.3
MUJERES
L 8.3 210.8 9.2 233.7 9.7 246.4
Fuente: (William, 2001)
Tabla 6 Denominación de partes del antebrazo y muñeca.
DENOMINACION
A Circunferencia de la muñeca
B Ancho de la muñeca
C Grosor o espesor de la muñeca
D Longitud del dorso
E Longitud de la mano
F Ancho de la mano
G Grosor o espesor de la mano
H Distancia del doblez de la muñeca al centro al mango
I Longitud del puño
J Ancho del puño
K Diámetro óptimo del mango
L Longitud antebrazo (entre ejes del codo y muñeca)
Fuente: (William, 2001)
32
3. CAPITULO 3
DISEÑO DE PROTOTIPO DE REHABILITACIÓN DE CODO Y
MUÑECA
3.1 Consideraciones de Diseño
3.1.1 Requisitos y restricciones
Con la finalidad de realizar un diseño óptimo, que se adapte
ergonómicamente al paciente satisfaciendo sus necesidades, se debe
considerar ciertos requisitos y restricciones que influirán en el desarrollo
mecánico, eléctrico y de control para lograr la funcionalidad del prototipo.
El prototipo del sistema de rehabilitación debe ser amigable al paciente
brindando seguridad, estabilidad y soporte al realizar los ejercicios, además
debe ser ajustable para que lo pueda usar cualquier paciente de edad adulta,
durante la primera y segunda fase de rehabilitación.
3.1.1.1 Consideración antropomórfica
El prototipo está netamente enfocado a la rehabilitación de los miembros
superiores, por lo que debe tomarse en cuenta el aspecto humano como son
sus medidas, posiciones, tipo de movimientos, ángulos, articulaciones, entre
otras, para el diseño y análisis del mismo.
33
3.1.1.2 Tipos de movimientos
El prototipo de rehabilitación realizará 8 movimientos de los cuales, 4 están
orientados a la recuperación de la muñeca y los 4 restantes al codo; dichos
movimientos se enlistan a continuación, además están expuestos a detalle en el
capítulo 2.
Flexión - Extensión del codo
Pronación - Supinación del codo
Flexión - Extensión de la muñeca
Aducción - Abducción de la muñeca
3.1.1.3 Número de grados de libertad
La importancia de definir los grados de libertad del sistema de rehabilitación,
es especificar el número de actuadores que necesitará el sistema para realizar
los movimientos de rehabilitación planteados.
El sistema trabajará con 4 grados de libertad, de los cuales 2 estarán
destinados a los movimientos de la muñeca y los restantes a los movimientos
del codo y antebrazo conjuntamente.
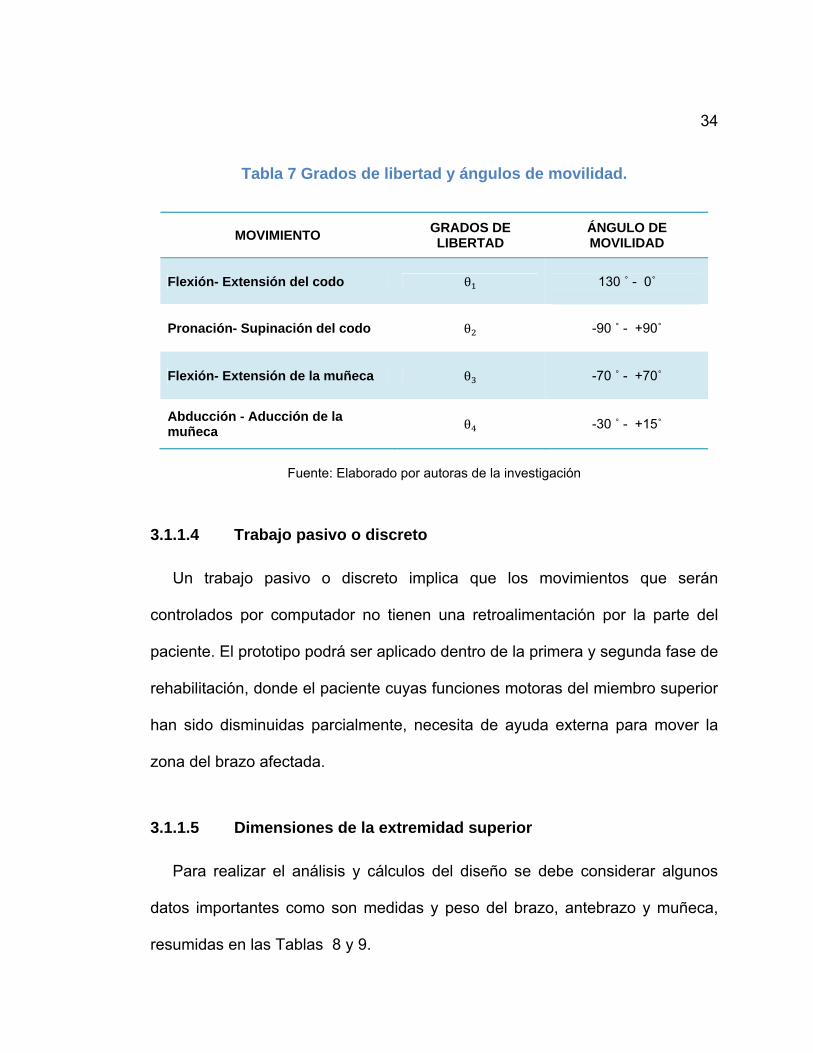
34
Tabla 7 Grados de libertad y ángulos de movilidad.
MOVIMIENTO GRADOS DE LIBERTAD
ÁNGULO DE MOVILIDAD
Flexión- Extensión del codo θ
130 ˚ - 0˚
Pronación- Supinación del codo θ
-90 ˚ - +90˚
Flexión- Extensión de la muñeca θ -70 ˚ - +70˚
Abducción - Aducción de la muñeca
θ -30 ˚ - +15˚
Fuente: Elaborado por autoras de la investigación
3.1.1.4 Trabajo pasivo o discreto
Un trabajo pasivo o discreto implica que los movimientos que serán
controlados por computador no tienen una retroalimentación por la parte del
paciente. El prototipo podrá ser aplicado dentro de la primera y segunda fase de
rehabilitación, donde el paciente cuyas funciones motoras del miembro superior
han sido disminuidas parcialmente, necesita de ayuda externa para mover la
zona del brazo afectada.
3.1.1.5 Dimensiones de la extremidad superior
Para realizar el análisis y cálculos del diseño se debe considerar algunos
datos importantes como son medidas y peso del brazo, antebrazo y muñeca,
resumidas en las Tablas 8 y 9.
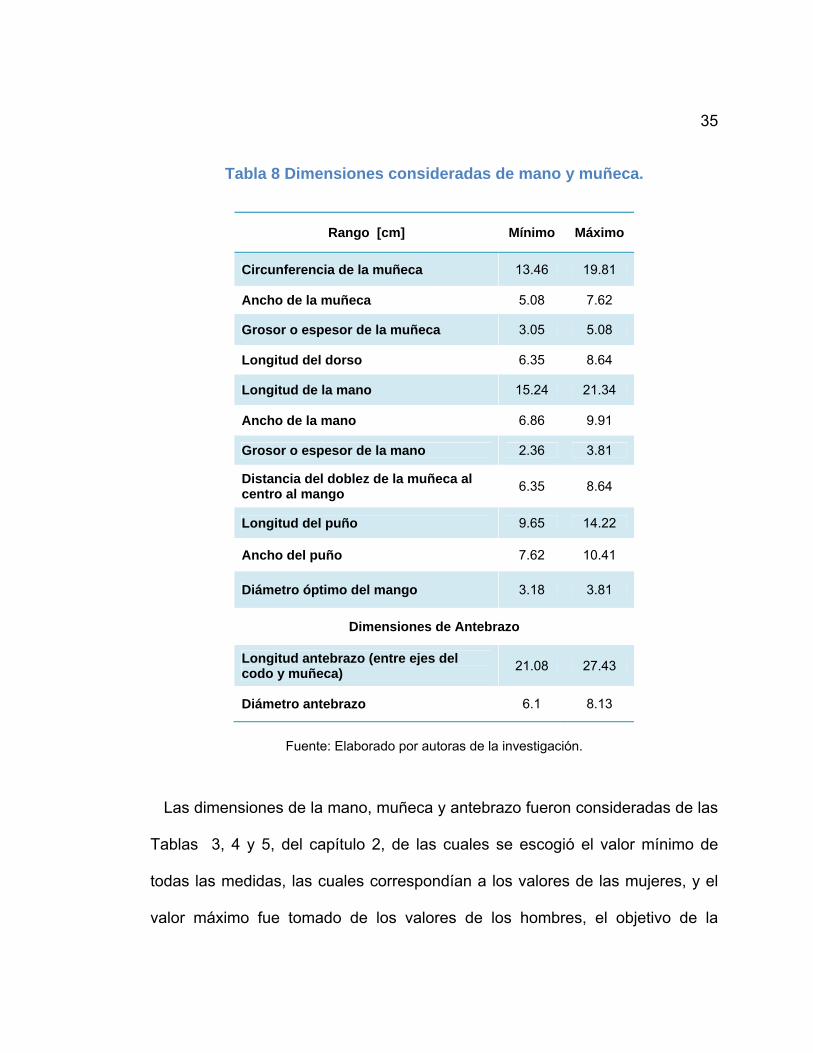
35
Tabla 8 Dimensiones consideradas de mano y muñeca.
Rango [cm] Mínimo Máximo
Circunferencia de la muñeca 13.46 19.81
Ancho de la muñeca 5.08 7.62
Grosor o espesor de la muñeca 3.05 5.08
Longitud del dorso 6.35 8.64
Longitud de la mano 15.24 21.34
Ancho de la mano 6.86 9.91
Grosor o espesor de la mano 2.36 3.81
Distancia del doblez de la muñeca al centro al mango
6.35 8.64
Longitud del puño 9.65 14.22
Ancho del puño 7.62 10.41
Diámetro óptimo del mango 3.18 3.81
Dimensiones de Antebrazo
Longitud antebrazo (entre ejes del codo y muñeca)
21.08 27.43
Diámetro antebrazo 6.1 8.13
Fuente: Elaborado por autoras de la investigación.
Las dimensiones de la mano, muñeca y antebrazo fueron consideradas de las
Tablas 3, 4 y 5, del capítulo 2, de las cuales se escogió el valor mínimo de
todas las medidas, las cuales correspondían a los valores de las mujeres, y el
valor máximo fue tomado de los valores de los hombres, el objetivo de la
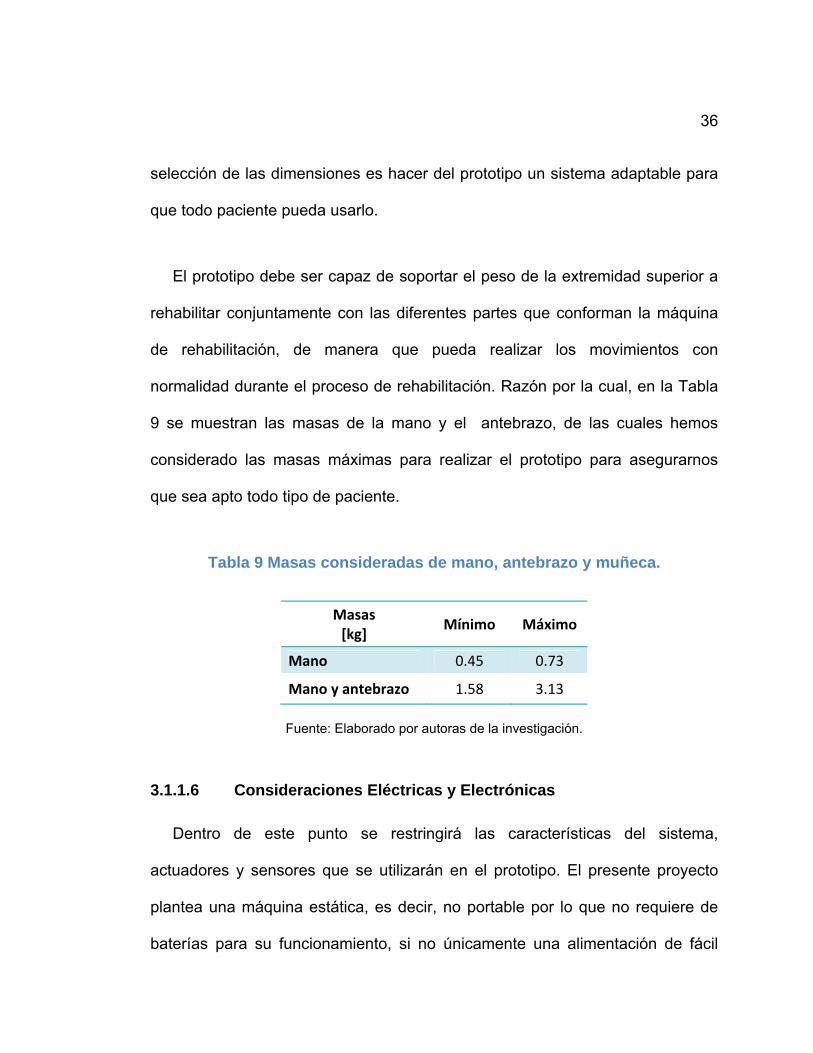
36
selección de las dimensiones es hacer del prototipo un sistema adaptable para
que todo paciente pueda usarlo.
El prototipo debe ser capaz de soportar el peso de la extremidad superior a
rehabilitar conjuntamente con las diferentes partes que conforman la máquina
de rehabilitación, de manera que pueda realizar los movimientos con
normalidad durante el proceso de rehabilitación. Razón por la cual, en la Tabla
9 se muestran las masas de la mano y el antebrazo, de las cuales hemos
considerado las masas máximas para realizar el prototipo para asegurarnos
que sea apto todo tipo de paciente.
Tabla 9 Masas consideradas de mano, antebrazo y muñeca.
Masas [kg]
Mínimo Máximo
Mano 0.45 0.73
Mano y antebrazo 1.58 3.13
Fuente: Elaborado por autoras de la investigación.
3.1.1.6 Consideraciones Eléctricas y Electrónicas
Dentro de este punto se restringirá las características del sistema,
actuadores y sensores que se utilizarán en el prototipo. El presente proyecto
plantea una máquina estática, es decir, no portable por lo que no requiere de
baterías para su funcionamiento, si no únicamente una alimentación de fácil

37
acceso en este caso sería de 120 VAC, sin embrago para la parte electrónica
es necesario que el voltaje sea de 5 a 24 VDC por las características de los
componentes electrónicos a utilizar.
Con respecto a los actuadores se definió únicamente la presencia de motores
para llevar a cabo el funcionamiento del prototipo. El o los actuadores deben
cumplir con las características enunciadas en la Tabla 10.
Tabla 10 Consideraciones eléctricas para el actuador.
Característica Detalle
Alimentación 5-24VDC o 120VAC
Velocidad Velocidades variables y
bajas inferiores a 10RPM.
Tamaño Reducido
Precisión Alta
Ruido Mínimo
Fuente: Elaborado por autoras de la investigación.
En el caso de los sensores es necesario que presenten una alta velocidad
de respuesta, ya que estos están relacionados directamente con las
seguridades que se deben brindar al paciente.
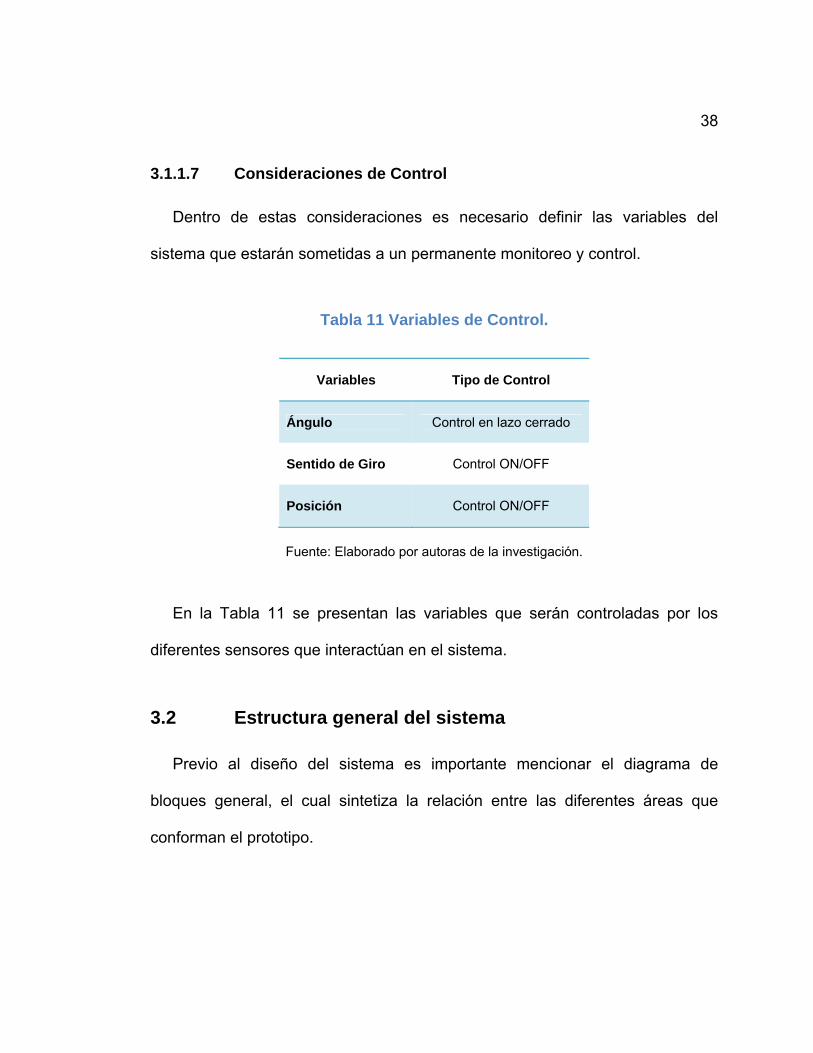
38
3.1.1.7 Consideraciones de Control
Dentro de estas consideraciones es necesario definir las variables del
sistema que estarán sometidas a un permanente monitoreo y control.
Tabla 11 Variables de Control.
Variables Tipo de Control
Ángulo Control en lazo cerrado
Sentido de Giro Control ON/OFF
Posición Control ON/OFF
Fuente: Elaborado por autoras de la investigación.
En la Tabla 11 se presentan las variables que serán controladas por los
diferentes sensores que interactúan en el sistema.
3.2 Estructura general del sistema
Previo al diseño del sistema es importante mencionar el diagrama de
bloques general, el cual sintetiza la relación entre las diferentes áreas que
conforman el prototipo.
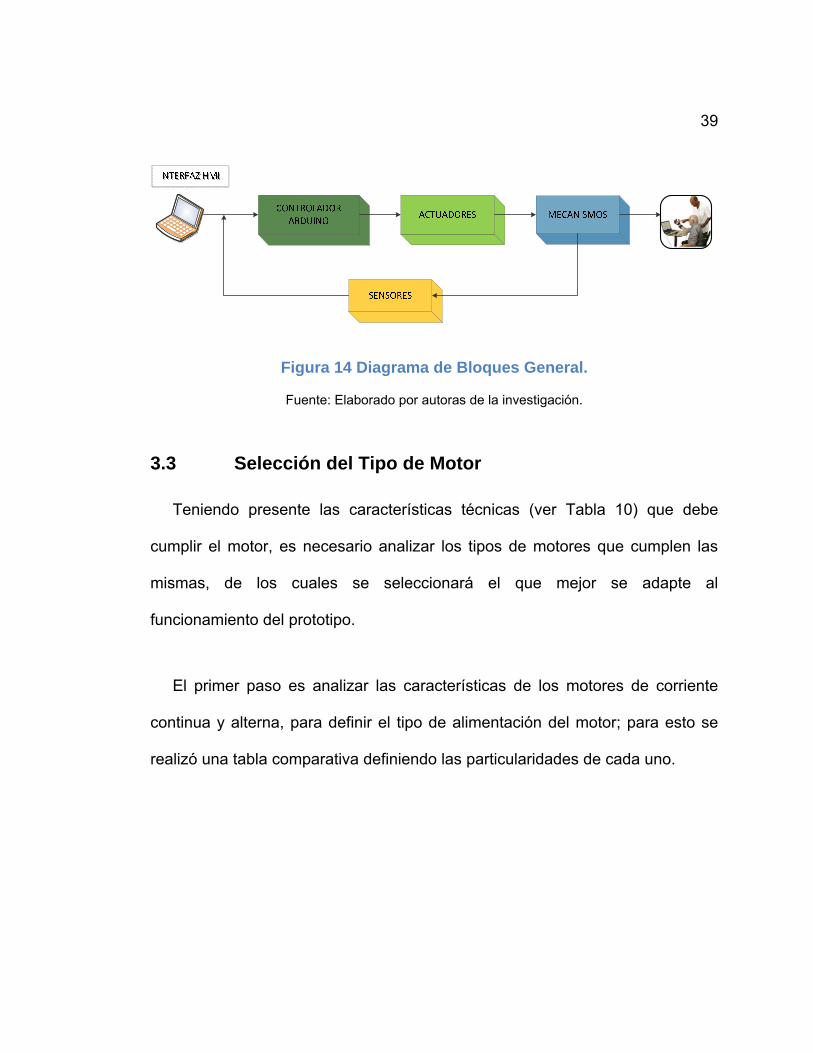
39
Figura 14 Diagrama de Bloques General.
Fuente: Elaborado por autoras de la investigación.
3.3 Selección del Tipo de Motor
Teniendo presente las características técnicas (ver Tabla 10) que debe
cumplir el motor, es necesario analizar los tipos de motores que cumplen las
mismas, de los cuales se seleccionará el que mejor se adapte al
funcionamiento del prototipo.
El primer paso es analizar las características de los motores de corriente
continua y alterna, para definir el tipo de alimentación del motor; para esto se
realizó una tabla comparativa definiendo las particularidades de cada uno.
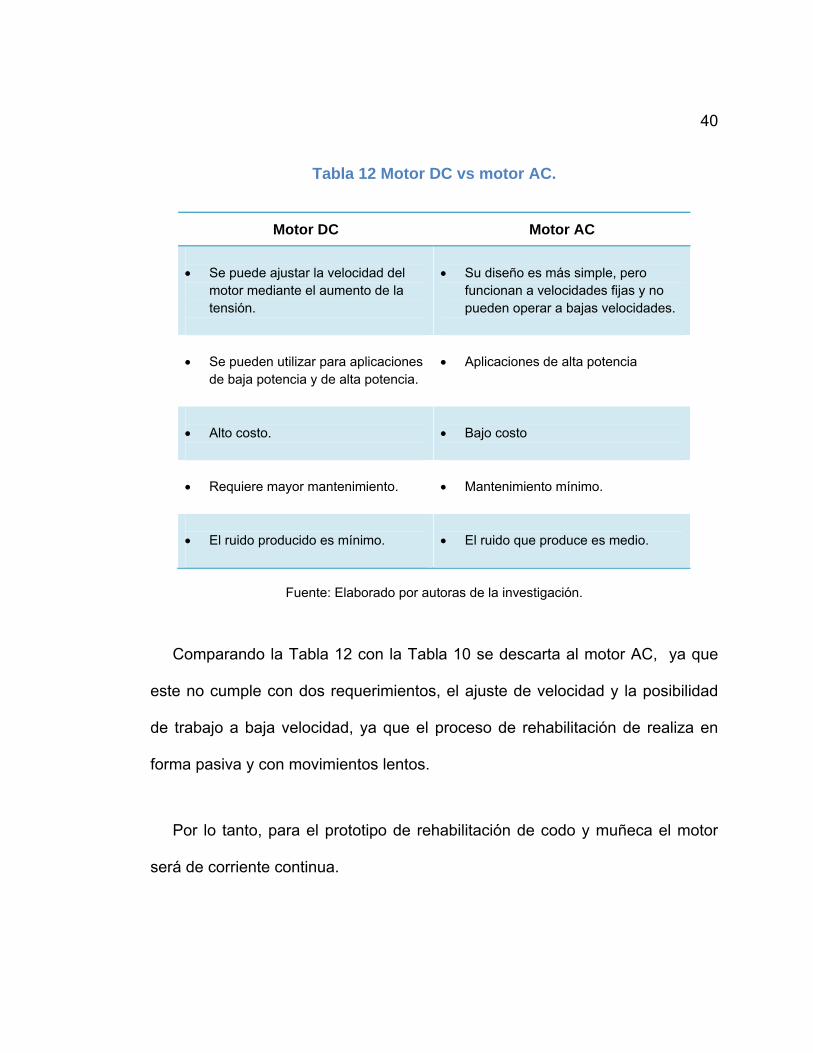
40
Tabla 12 Motor DC vs motor AC.
Motor DC Motor AC
Se puede ajustar la velocidad del
motor mediante el aumento de la tensión.
Su diseño es más simple, pero
funcionan a velocidades fijas y no pueden operar a bajas velocidades.
Se pueden utilizar para aplicaciones
de baja potencia y de alta potencia.
Aplicaciones de alta potencia
Alto costo.
Bajo costo
Requiere mayor mantenimiento.
Mantenimiento mínimo.
El ruido producido es mínimo.
El ruido que produce es medio.
Fuente: Elaborado por autoras de la investigación.
Comparando la Tabla 12 con la Tabla 10 se descarta al motor AC, ya que
este no cumple con dos requerimientos, el ajuste de velocidad y la posibilidad
de trabajo a baja velocidad, ya que el proceso de rehabilitación de realiza en
forma pasiva y con movimientos lentos.
Por lo tanto, para el prototipo de rehabilitación de codo y muñeca el motor
será de corriente continua.
41
3.3.1 Motor de Corriente Continua
El motor eléctrico es un dispositivo electromotriz, es decir, convierten la
energía eléctrica en energía motriz. El motor de corriente continua es uno de los
dispositivos más versátiles en la industria, por su fácil control de par, posición y
velocidad, convirtiéndolo en una de las mejores opciones en aplicación de
control y automatización de procesos (Martínez, 2012).
Para poder realizar la selección del motor a utilizar, es necesario conocer los
diferentes tipos de motores de corriente continua, para dicha elección se
considera la forma de control del motor, su costo y además que cumpla con las
características técnicas especificadas en la Tabla 10.
3.3.1.1 Motor a pasos
Un motor paso a paso se caracteriza por posicionar su eje en posiciones
fijas o pasos dependiendo de la secuencia que se utilice. Este motor presenta
las ventajas de tener alta precisión y repetitividad en cuanto al posicionamiento.
Cada movimiento o paso que realice el motor mediante la señal de control,
tiene un valor predefinido, el avance es generalmente de 1.8°, siendo una
desventaja para el presente proyecto, ya que se necesita alcanzar ángulos que
estén entre 0 º a 270º y al tener pasos o avances predefinidos no es posible
conseguir ángulos intermedios en el giro del motor.
42
3.3.1.2 Servomotor
Es un motor eléctrico de reducido tamaño, controlado por modulación de
ancho de pulso (PWM), el cual le permite ubicarse en cualquier posición dentro
de su rango de operación, y mantenerse estable en dicha posición. Cuenta con
un pequeño motor con un reductor de velocidad y multiplicador de fuerza,
dispone también de un pequeño circuito que gobierna el sistema
(Servomotores, 2013). El recorrido del eje de salida es de 180º en la mayoría
de ellos, pero puede ser fácilmente modificado para un recorrido libre de 360º.
Su desventaja es el alto costo que tiene en el mercado, pero la precisión, el
fácil control, y su funcionamiento en bajas velocidad, hacen de este una buena
opción de motor.
3.3.2 Análisis y Selección
Después de conocer algunas características de los tipos de motores de
corriente continua realizaremos la selección del tipo de motor mediante una
tabla comparativa, en la cual se asignará un valor según el porcentaje que cada
motor cumpla con la característica planteada.
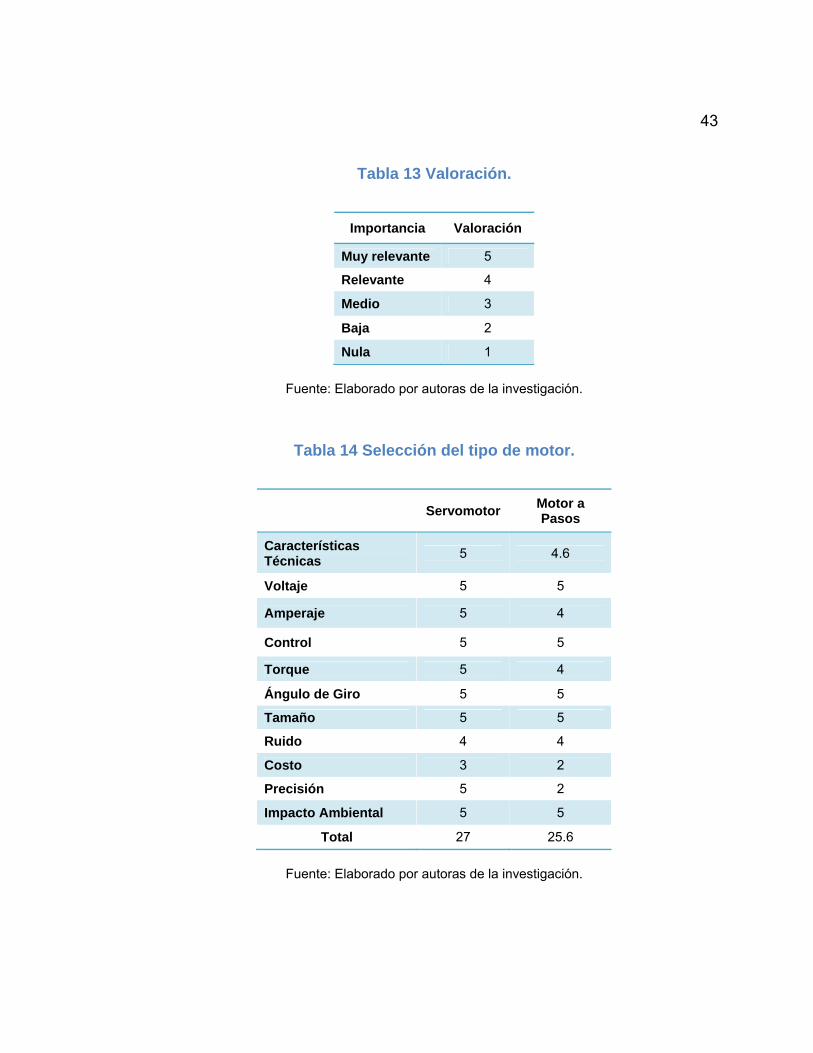
43
Tabla 13 Valoración.
Importancia Valoración
Muy relevante 5
Relevante 4
Medio 3
Baja 2
Nula 1
Fuente: Elaborado por autoras de la investigación.
Tabla 14 Selección del tipo de motor.
Servomotor
Motor a Pasos
Características Técnicas
5 4.6
Voltaje 5 5
Amperaje 5 4
Control 5 5
Torque 5 4
Ángulo de Giro 5 5
Tamaño 5 5
Ruido 4 4
Costo 3 2
Precisión 5 2
Impacto Ambiental 5 5
Total 27 25.6
Fuente: Elaborado por autoras de la investigación.
44
Analizando los resultados obtenidos de la Tabla 14 el motor cuyas
características se adaptan a la necesidad del prototipo es un servomotor.
3.4 Diseño Mecánico
3.4.1 Herramientas de desarrollo
3.4.1.1 SolidWorks
SolidWorks es un programa que permite el desarrollo de modelos mecánicos
de piezas y conjuntos de piezas, además permite hacer diferentes análisis
mecánicos a la misma.
3.4.2 Diseño de mecanismos
Con el propósito de realizar un diseño óptimo, reduciendo recursos,
espacios y costos, se ha analizado la similitud de los movimientos de codo y
muñeca, aprovechando las características de los mismos para acoplarlos a un
solo mecanismo.
Dado que los movimientos de flexión y extensión del cuerpo humano se
realizan en el plano sagital medio con respecto al eje medio lateral, se puede
sintetizar los movimientos de flexión y extensión de codo y muñeca en un solo
mecanismo.
45
El movimiento de abducción y aducción de la muñeca se efectúa en el plano
frontal, respecto al eje anteroposterior; sin embargo, al rotar el antebrazo 90°
(dedo pulgar señalando hacia arriba), la muñeca rota con respecto al eje medio
lateral, sin afectar las características del movimiento. Por lo tanto, es posible
unir el movimiento de abducción y aducción al mecanismo propuesto para la
flexión y extensión de codo y muñeca, utilizando su respectiva adaptación.
El movimiento de pronación y supinación de la muñeca se da en el plano
transversal, con relación al eje vertical; para nuestro propósito, no utilizaremos
la posición neutra (Ver planimetría Cap. 2) ya que el brazo debe estar elevado a
una posición horizontal; al realizar esta variación el plano de trabajo cambia al
frontal y el eje de rotación pasaría a ser el anteroposterior, de tal manera que el
dedo pulgar esté dispuesto hacia arriba.
Debido a que el eje de rotación de la abducción y aducción es distinto a los
movimientos anteriores, se consideró la reubicación del brazo del paciente de
tal manera que se logre aprovechar el mismo actuador para realizar todos los
movimientos.
Por lo tanto, el diseño del mecanismo admite tres adaptaciones diferentes,
con las cuales es posible cumplir con los movimientos planteados. El diagrama

46
de bloques sintetizado del sistema referente a los mecanismos del prototipo se
puede apreciar en la Figura 15.
Figura 15 Diagrama de bloques de los mecanismos.
Fuente: Elaborado por autoras de la investigación.
3.4.3 Sistema de Soporte y Desplazamiento
Considerando la rehabilitación de ambas extremidades, se diseñó un
sistema ajustable para el soporte del brazo. Este consta de un canal en forma
de T, y dos soportes móviles que se desplazaran sobre éste. Dichos soportes a
su vez son desmontables, lo que facilita la reubicación del brazo del paciente
dependiendo el movimiento que realice.
Para la dimensión del canal se analizó las posturas del paciente en cada
movimiento, determinando que la medida más relevante es la del antebrazo, ya
que este debe estar apoyado durante el proceso de rehabilitación.
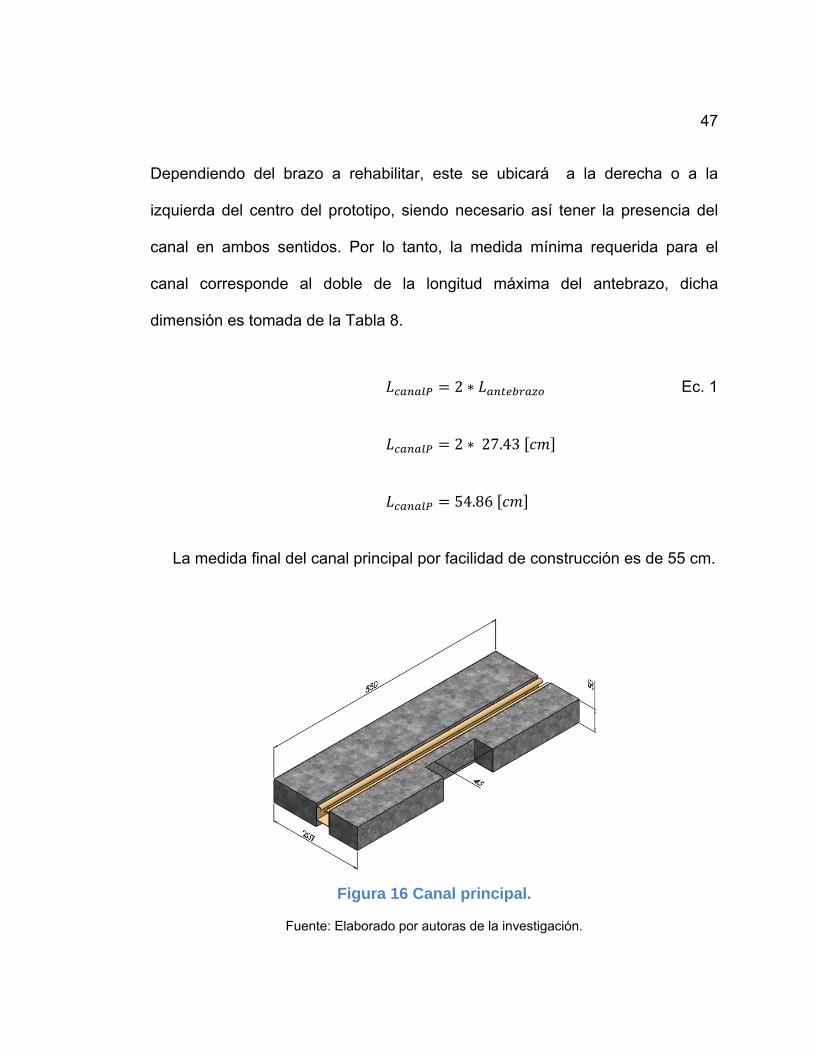
47
Dependiendo del brazo a rehabilitar, este se ubicará a la derecha o a la
izquierda del centro del prototipo, siendo necesario así tener la presencia del
canal en ambos sentidos. Por lo tanto, la medida mínima requerida para el
canal corresponde al doble de la longitud máxima del antebrazo, dicha
dimensión es tomada de la Tabla 8.
2 ∗ Ec. 1
2 ∗ 27.43
54.86
La medida final del canal principal por facilidad de construcción es de 55 cm.
Figura 16 Canal principal.
Fuente: Elaborado por autoras de la investigación.
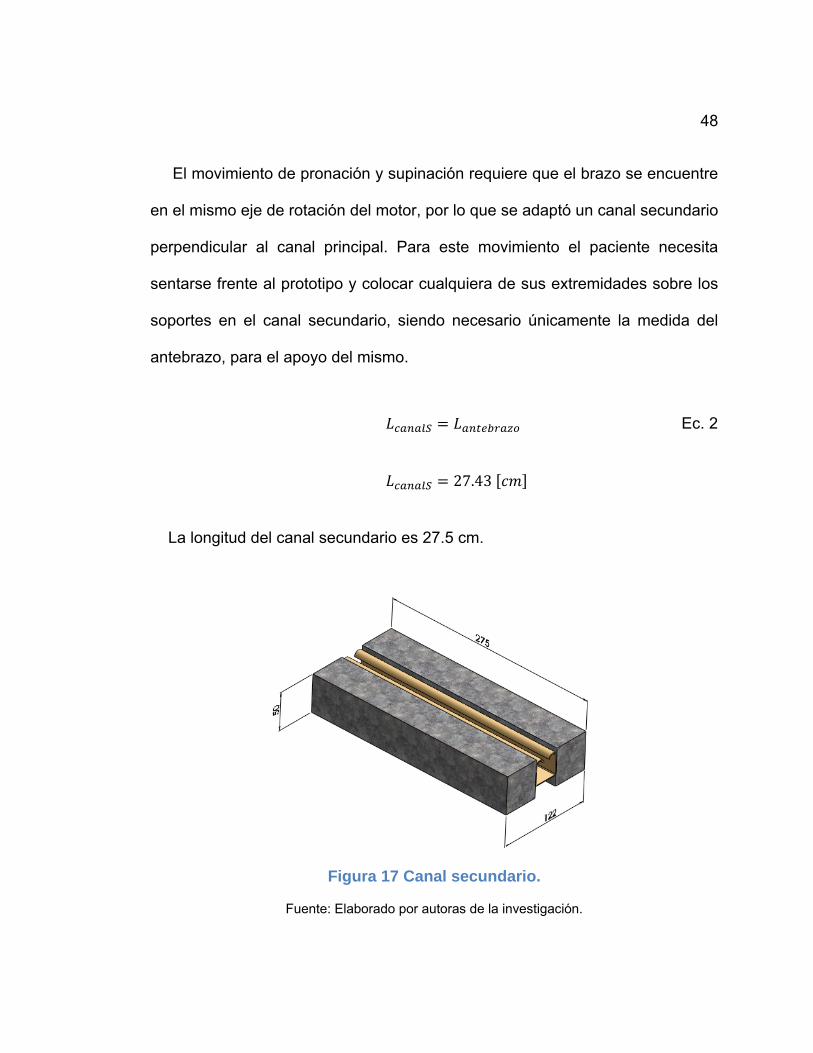
48
El movimiento de pronación y supinación requiere que el brazo se encuentre
en el mismo eje de rotación del motor, por lo que se adaptó un canal secundario
perpendicular al canal principal. Para este movimiento el paciente necesita
sentarse frente al prototipo y colocar cualquiera de sus extremidades sobre los
soportes en el canal secundario, siendo necesario únicamente la medida del
antebrazo, para el apoyo del mismo.
Ec. 2
27.43
La longitud del canal secundario es 27.5 cm.
Figura 17 Canal secundario.
Fuente: Elaborado por autoras de la investigación.
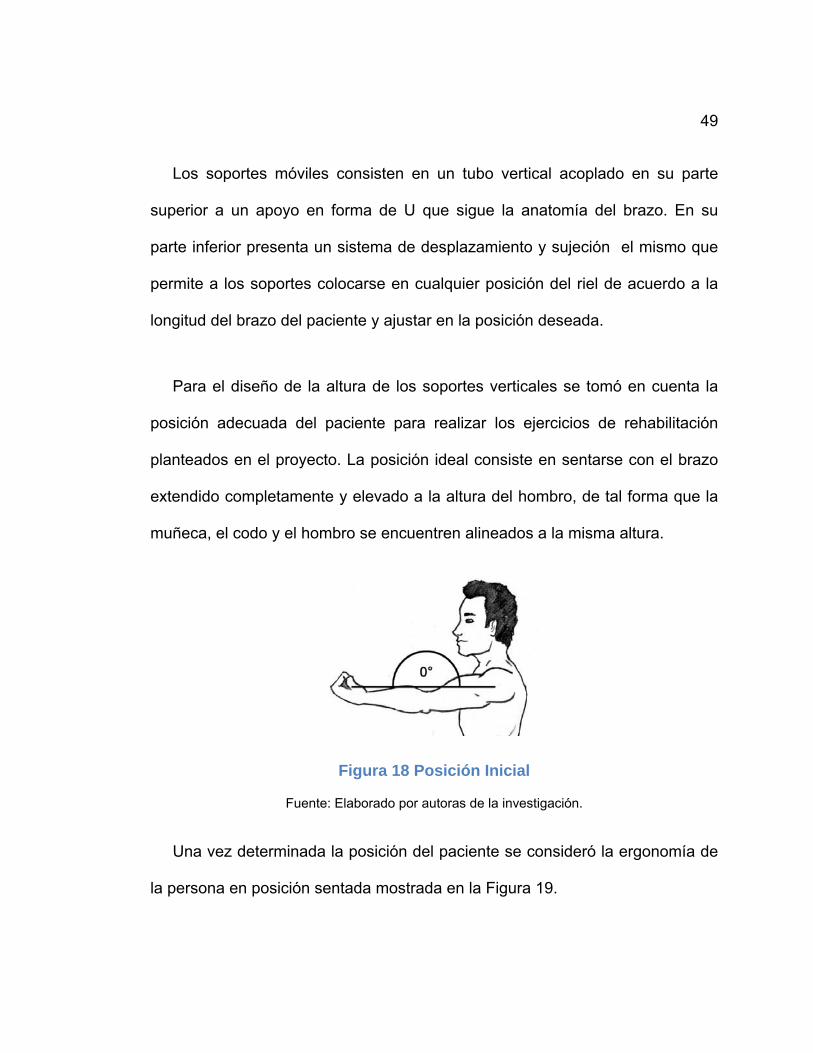
49
Los soportes móviles consisten en un tubo vertical acoplado en su parte
superior a un apoyo en forma de U que sigue la anatomía del brazo. En su
parte inferior presenta un sistema de desplazamiento y sujeción el mismo que
permite a los soportes colocarse en cualquier posición del riel de acuerdo a la
longitud del brazo del paciente y ajustar en la posición deseada.
Para el diseño de la altura de los soportes verticales se tomó en cuenta la
posición adecuada del paciente para realizar los ejercicios de rehabilitación
planteados en el proyecto. La posición ideal consiste en sentarse con el brazo
extendido completamente y elevado a la altura del hombro, de tal forma que la
muñeca, el codo y el hombro se encuentren alineados a la misma altura.
Figura 18 Posición Inicial
Fuente: Elaborado por autoras de la investigación.
Una vez determinada la posición del paciente se consideró la ergonomía de
la persona en posición sentada mostrada en la Figura 19.
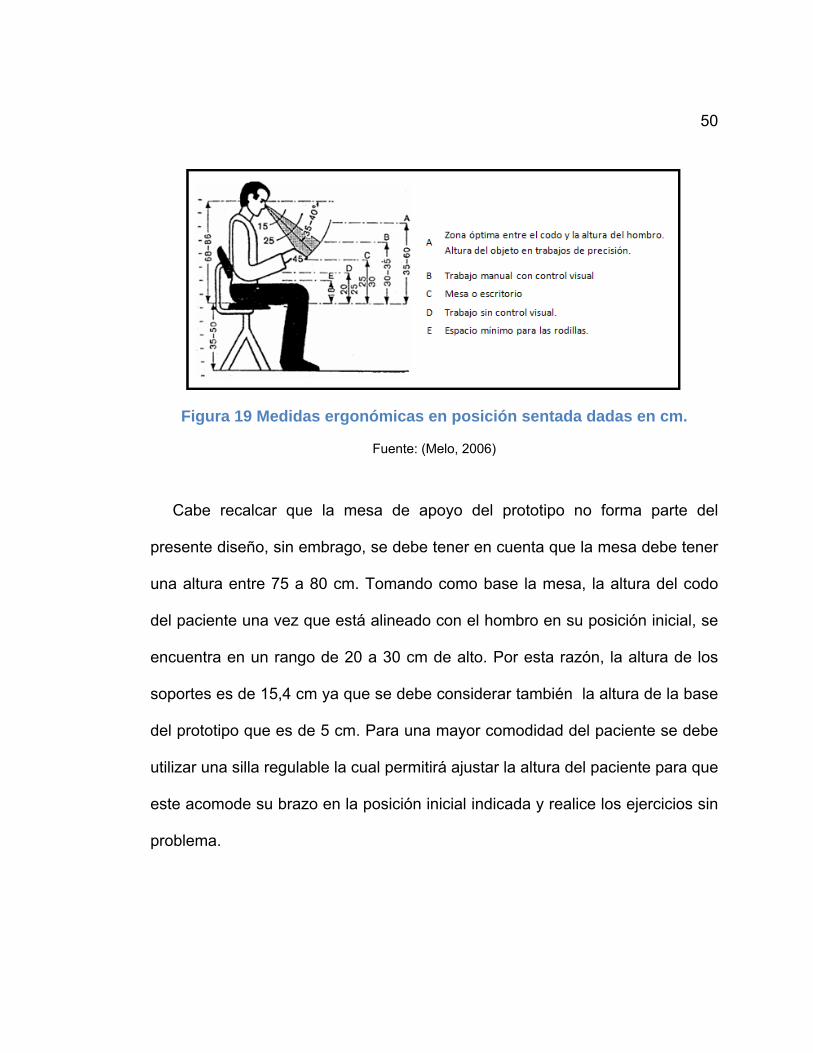
50
Figura 19 Medidas ergonómicas en posición sentada dadas en cm.
Fuente: (Melo, 2006)
Cabe recalcar que la mesa de apoyo del prototipo no forma parte del
presente diseño, sin embrago, se debe tener en cuenta que la mesa debe tener
una altura entre 75 a 80 cm. Tomando como base la mesa, la altura del codo
del paciente una vez que está alineado con el hombro en su posición inicial, se
encuentra en un rango de 20 a 30 cm de alto. Por esta razón, la altura de los
soportes es de 15,4 cm ya que se debe considerar también la altura de la base
del prototipo que es de 5 cm. Para una mayor comodidad del paciente se debe
utilizar una silla regulable la cual permitirá ajustar la altura del paciente para que
este acomode su brazo en la posición inicial indicada y realice los ejercicios sin
problema.
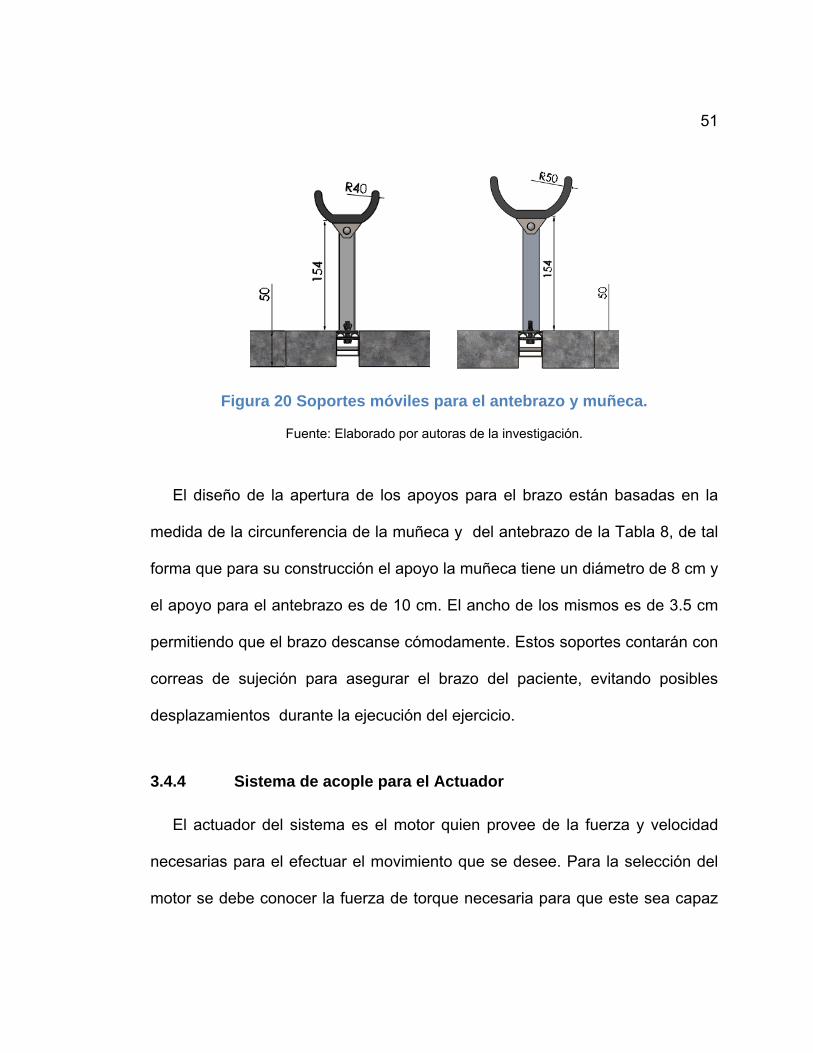
51
Figura 20 Soportes móviles para el antebrazo y muñeca.
Fuente: Elaborado por autoras de la investigación.
El diseño de la apertura de los apoyos para el brazo están basadas en la
medida de la circunferencia de la muñeca y del antebrazo de la Tabla 8, de tal
forma que para su construcción el apoyo la muñeca tiene un diámetro de 8 cm y
el apoyo para el antebrazo es de 10 cm. El ancho de los mismos es de 3.5 cm
permitiendo que el brazo descanse cómodamente. Estos soportes contarán con
correas de sujeción para asegurar el brazo del paciente, evitando posibles
desplazamientos durante la ejecución del ejercicio.
3.4.4 Sistema de acople para el Actuador
El actuador del sistema es el motor quien provee de la fuerza y velocidad
necesarias para el efectuar el movimiento que se desee. Para la selección del
motor se debe conocer la fuerza de torque necesaria para que este sea capaz
52
de mover los mecanismos y la extremidad superior de la persona en el proceso
de rehabilitación.
Para el diseño del sistema de acople es necesario definir el modelo de
servomotor que se va a utilizar, para lo cual se realizó los cálculos de torque
respectivos. Se ha considerado las masas de mano y antebrazo expuestas en
la Tabla 9 y las dimensiones de los mismos correspondientes a la Tabla 8.
Cabe recalcar que en este punto los cálculos no toman en cuenta las masas
de los mecanismos a adaptar.
3.4.4.1 Cálculo de Torque
Los datos que influyen para el diseño son los máximos tanto de masas de
mano y antebrazo, además la distancia desde el eje del codo hasta el centro de
la mano donde se sostiene el mango del sistema para los movimientos del
codo, mientras que para los movimientos de la muñeca la distancia a tomar en
cuenta es la del doblez de la muñeca al centro al mango.
Siguiendo la mecánica de Newton referente a momentos, la ecuación
obtenida se muestra a continuación:
∗ Ec. 3
53
Para Flexión-Extensión del codo:
10.15
Para Pronación-Supinación del codo:
4.19
Para Flexión-Extensión de la muñeca:
1.25
Para Abducción-Aducción de la muñeca:
1.37
3.4.4.2 Selección de modelo de Servomotor
Analizando los resultados de los cálculos de momento, el servomotor a
seleccionar debe superar un torque de 10.15 . No obstante el motor debe
tener un torque mayor para que su trabajo no sea forzado.
En la Tabla 15 se exponen los servomotores que se encuentran en el
mercado con sus características.
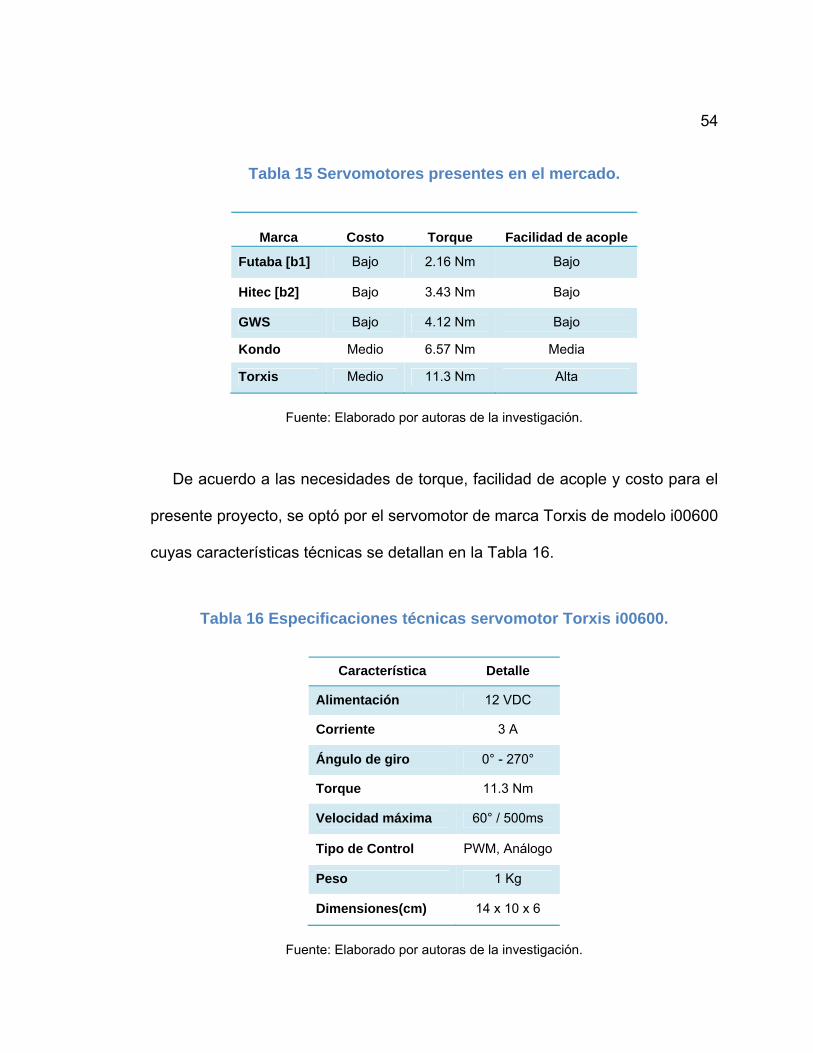
54
Tabla 15 Servomotores presentes en el mercado.
Marca
Costo
Torque
Facilidad de acople
Futaba [b1] Bajo 2.16 Nm Bajo
Hitec [b2] Bajo 3.43 Nm Bajo
GWS Bajo 4.12 Nm Bajo
Kondo Medio 6.57 Nm Media
Torxis Medio 11.3 Nm Alta
Fuente: Elaborado por autoras de la investigación.
De acuerdo a las necesidades de torque, facilidad de acople y costo para el
presente proyecto, se optó por el servomotor de marca Torxis de modelo i00600
cuyas características técnicas se detallan en la Tabla 16.
Tabla 16 Especificaciones técnicas servomotor Torxis i00600.
Característica Detalle
Alimentación 12 VDC
Corriente 3 A
Ángulo de giro 0° - 270°
Torque 11.3 Nm
Velocidad máxima 60° / 500ms
Tipo de Control PWM, Análogo
Peso 1 Kg
Dimensiones(cm) 14 x 10 x 6
Fuente: Elaborado por autoras de la investigación.

55
Figura 21 Servomotor Torxis i00600.
Fuente: Invenscience LC. Obtenido de http://www.torxis.com/
3.4.4.3 Mecanismo de acople de motor
El motor viene originalmente con un disco de 5.6 cm de diámetro con ocho
agujeros de rosca M5 interna acoplado a su eje de salida. Con el propósito de
mejorar la sujeción de los mecanismos conectados al motor, se fabricó un disco
con características similares al original pero con un diámetro superior de 12.5
cm. El material del nuevo disco es aluminio ya que por sus propiedades de
resistencia, fácil maquinado, y baja densidad hacen de este la mejor opción
para esta pieza.

56
Figura 22 Servomotor Torxis i00600 con disco de 12.5 cm de diámetro.
Fuente: Elaborado por autoras de la investigación.
El acople del motor está conformado por un disco y un perfil metálico
cuadrado, que conjuntamente permitirán instalar las diferentes piezas para
realizar cada movimiento. Teniendo en cuenta el tamaño de las piezas que se
adaptarán y las dimensiones anatómicas del brazo, el disco se diseñó de tal
manera que permita la sujeción de las piezas en dos puntos brindándoles
firmeza y evitando desplazamientos no deseados.
Los dos puntos de sujeción en el perfil metálico cuadrado tienen el objetivo
de distribuir la carga originada por el peso de la extremidad superior y los
mecanismos acoplados. El perfil cuadrado de 2.54 cm y 0.2 cm de espesor
tiene un largo de 10 cm y cuatro orificios de rosca M5 para la fijación de las
adaptaciones que se diseñarán posteriormente.

57
Figura 23 Perfil metálico cuadrado de 1 pulgada.
Fuente: Elaborado por autoras de la investigación.
Finalmente el servomotor acoplado al perfil metálico y al disco de aluminio
se vería como en la Figura 24.
Figura 24 Sistema de acople de motor.
Fuente: Elaborado por autoras de la investigación.
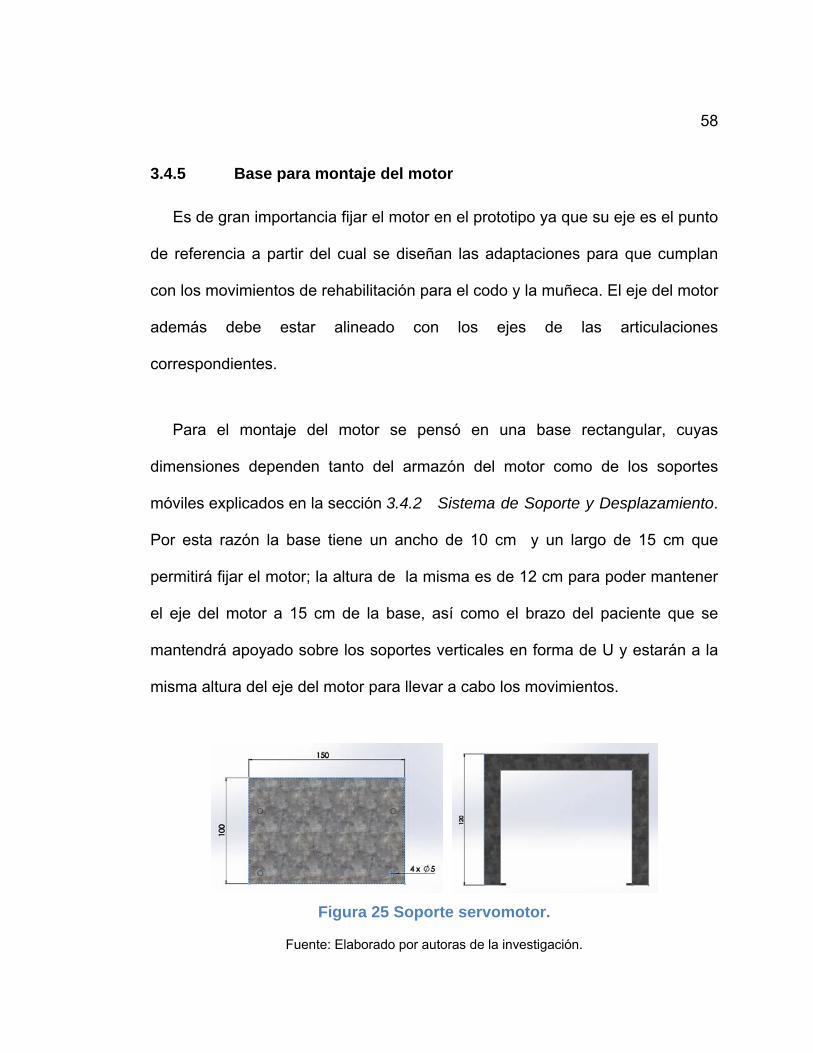
58
3.4.5 Base para montaje del motor
Es de gran importancia fijar el motor en el prototipo ya que su eje es el punto
de referencia a partir del cual se diseñan las adaptaciones para que cumplan
con los movimientos de rehabilitación para el codo y la muñeca. El eje del motor
además debe estar alineado con los ejes de las articulaciones
correspondientes.
Para el montaje del motor se pensó en una base rectangular, cuyas
dimensiones dependen tanto del armazón del motor como de los soportes
móviles explicados en la sección 3.4.2 Sistema de Soporte y Desplazamiento.
Por esta razón la base tiene un ancho de 10 cm y un largo de 15 cm que
permitirá fijar el motor; la altura de la misma es de 12 cm para poder mantener
el eje del motor a 15 cm de la base, así como el brazo del paciente que se
mantendrá apoyado sobre los soportes verticales en forma de U y estarán a la
misma altura del eje del motor para llevar a cabo los movimientos.
Figura 25 Soporte servomotor.
Fuente: Elaborado por autoras de la investigación.

59
El sistema de acople del motor se montará en conjunto con el motor en la
base como se muestra en la Figura 26.
Figura 26 Base de motor ensamblado el motor y adaptación.
Fuente: Elaborado por autoras de la investigación.
3.4.6 Adaptación para el mecanismo de la flexión y extensión del
codo
3.4.6.1 Selección del mecanismo
Para la flexión y extensión del codo la adaptación requerida consiste de un
tubo cuadrado asegurado al perfil metálico ubicado en el disco. Dado que el eje
de movimiento de la articulación del codo debe estar alineado al eje del motor,
se ha considerado la medida de la longitud mínima y máxima del antebrazo y la
distancia del doblez de la muñeca al centro del mango tomado por la mano (Ver
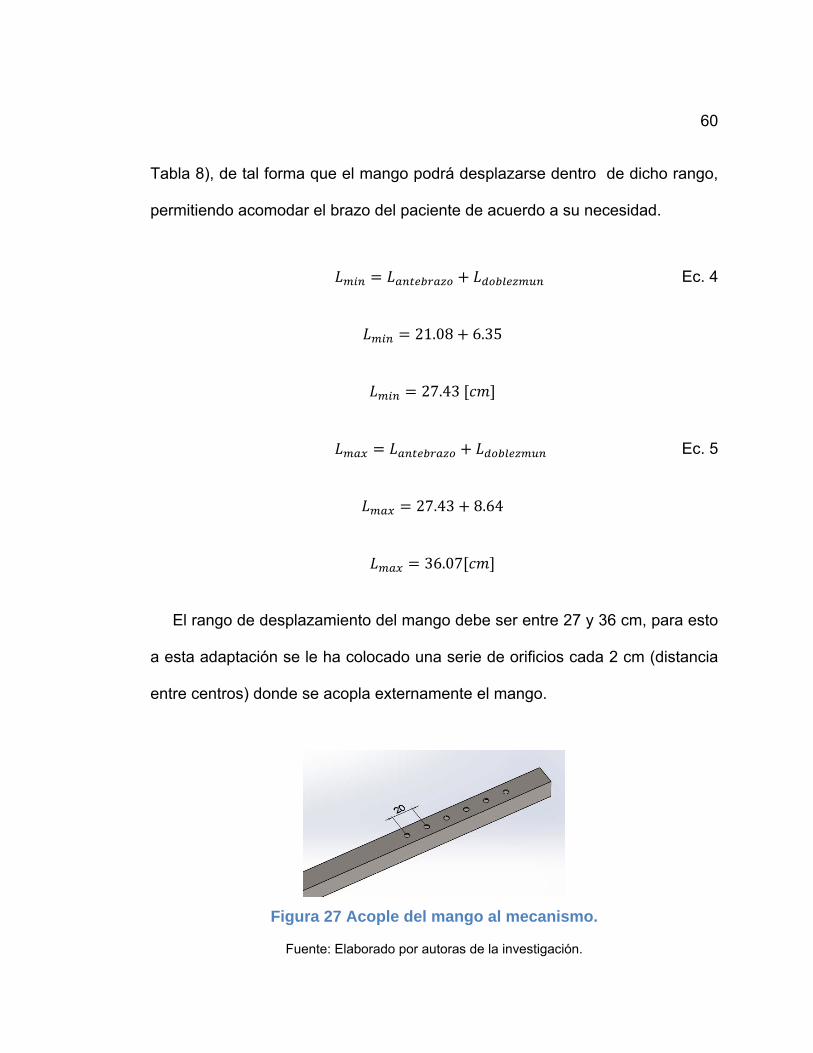
60
Tabla 8), de tal forma que el mango podrá desplazarse dentro de dicho rango,
permitiendo acomodar el brazo del paciente de acuerdo a su necesidad.
Ec. 4
21.08 6.35
27.43
Ec. 5
27.43 8.64
36.07
El rango de desplazamiento del mango debe ser entre 27 y 36 cm, para esto
a esta adaptación se le ha colocado una serie de orificios cada 2 cm (distancia
entre centros) donde se acopla externamente el mango.
Figura 27 Acople del mango al mecanismo.
Fuente: Elaborado por autoras de la investigación.
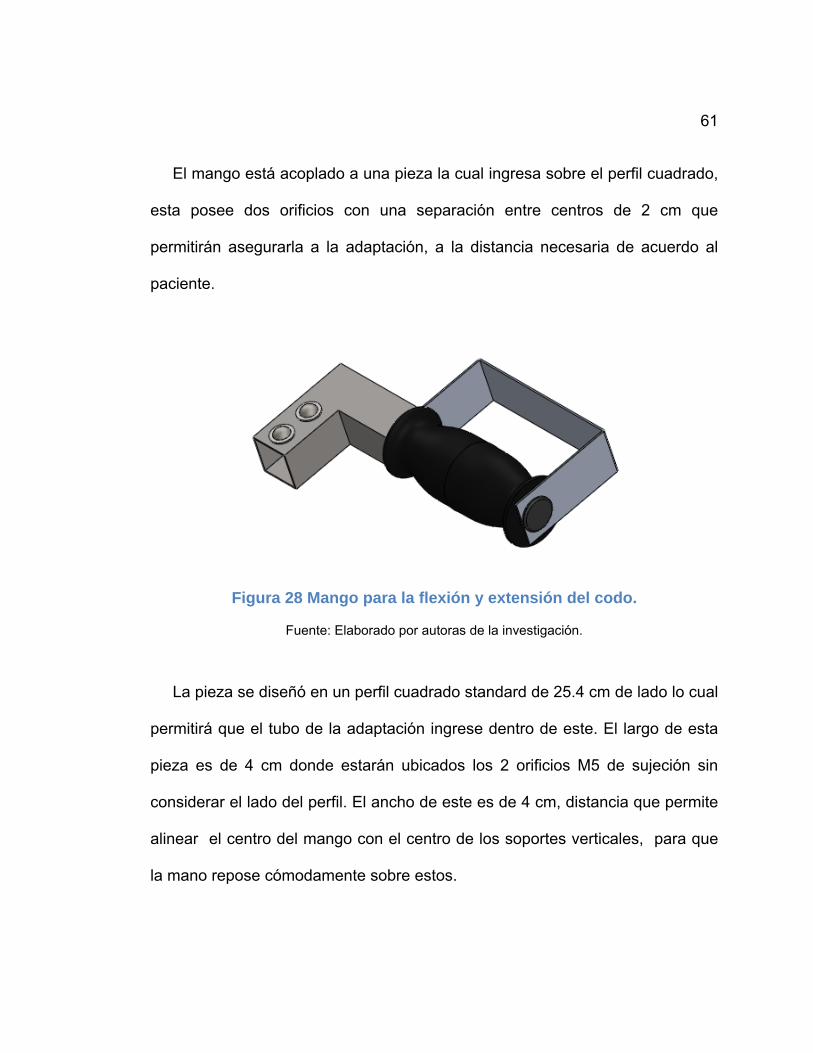
61
El mango está acoplado a una pieza la cual ingresa sobre el perfil cuadrado,
esta posee dos orificios con una separación entre centros de 2 cm que
permitirán asegurarla a la adaptación, a la distancia necesaria de acuerdo al
paciente.
Figura 28 Mango para la flexión y extensión del codo.
Fuente: Elaborado por autoras de la investigación.
La pieza se diseñó en un perfil cuadrado standard de 25.4 cm de lado lo cual
permitirá que el tubo de la adaptación ingrese dentro de este. El largo de esta
pieza es de 4 cm donde estarán ubicados los 2 orificios M5 de sujeción sin
considerar el lado del perfil. El ancho de este es de 4 cm, distancia que permite
alinear el centro del mango con el centro de los soportes verticales, para que
la mano repose cómodamente sobre estos.
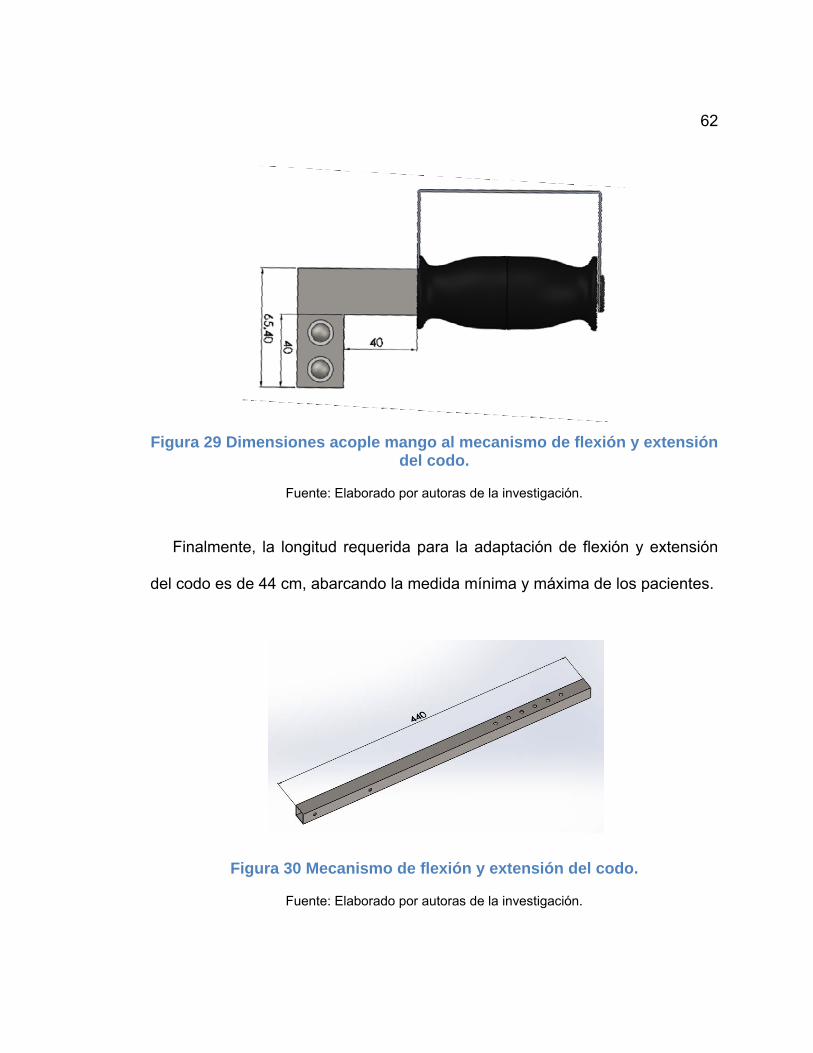
62
Figura 29 Dimensiones acople mango al mecanismo de flexión y extensión del codo.
Fuente: Elaborado por autoras de la investigación.
Finalmente, la longitud requerida para la adaptación de flexión y extensión
del codo es de 44 cm, abarcando la medida mínima y máxima de los pacientes.
Figura 30 Mecanismo de flexión y extensión del codo.
Fuente: Elaborado por autoras de la investigación.
63
3.4.6.1.1 Selección del mango
La selección del mango se realiza valorando ciertas características como
son la longitud y diámetro óptimo, la superficie de contacto, el acabado, el
confort de uso y el material. Además, es importante la orientación del mango ya
que esta debe conseguir una mínima desviación de la muñeca durante todo tipo
de movimiento. La simetría del mango es otro aspecto esencial en el presente
proyecto ya que será utilizado para la rehabilitación de ambos brazos.
Las dimensiones de longitud y diámetro del mango deben ser suficientes
para permitir el agarre adecuado al realizar los ejercicios. Al analizar las
medidas de ancho de puño y diámetro óptimo del mango expuestas en la Tabla
8, se determina seleccionar la medida máxima de ancho de puño de 10.41 cm
para la longitud del mango; sin embargo el diámetro seleccionado para el
mango es de 3.5 cm, que es el promedio entre la medida mínima y máxima del
diámetro óptimo del mango para que una persona con un puño pequeño sea
capaz de tomar cómodamente el mango. Por standard en el mercado se
encuentran mangos de una longitud de 10.5 cm de longitud y 3 a 3.5 cm de
diámetro.
La superficie del mango debe ser ligeramente compresible para mejorar la
distribución de presión en la mano del paciente, esta no debe ser muy lisa o
pulida para evitar deslizamiento, ni tan rugosa para ser abrasiva para el

64
paciente. El acabado del mango debe tener bordes redondeados para evitar
presiones en ciertas zonas de la palma de la mano. No debe incluir alojamiento
para los dedos ya que se adaptaría únicamente a cierto número de pacientes.
Además para el confort del paciente se recomienda que en equipos médicos se
trabaje con mango de goma.
Considerando todas las características mencionadas anteriormente, se
selecciona un mango de goma poco rugoso de 10.5 cm de longitud y 3.5 cm de
diámetro.
Figura 31 Dimensiones Mango para mecanismos propuestos.
Fuente: Elaborado por autoras de la investigación.
3.4.7 Adaptación para el mecanismo de la pronación y supinación
del codo
3.4.7.1 Selección del mecanismo
El movimiento de pronación y supinación del codo se realiza alrededor del
eje del motor, por lo que la adaptación se la diseñó en forma de U invertida de
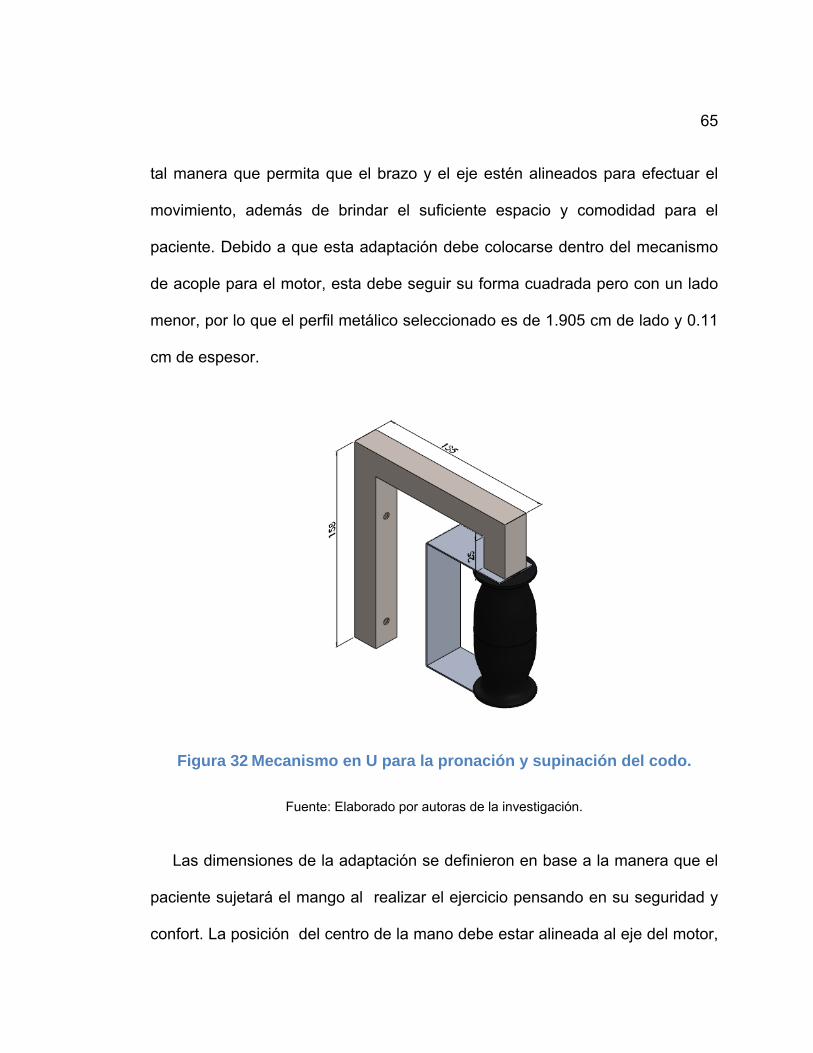
65
tal manera que permita que el brazo y el eje estén alineados para efectuar el
movimiento, además de brindar el suficiente espacio y comodidad para el
paciente. Debido a que esta adaptación debe colocarse dentro del mecanismo
de acople para el motor, esta debe seguir su forma cuadrada pero con un lado
menor, por lo que el perfil metálico seleccionado es de 1.905 cm de lado y 0.11
cm de espesor.
Figura 32 Mecanismo en U para la pronación y supinación del codo.
Fuente: Elaborado por autoras de la investigación.
Las dimensiones de la adaptación se definieron en base a la manera que el
paciente sujetará el mango al realizar el ejercicio pensando en su seguridad y
confort. La posición del centro de la mano debe estar alineada al eje del motor,
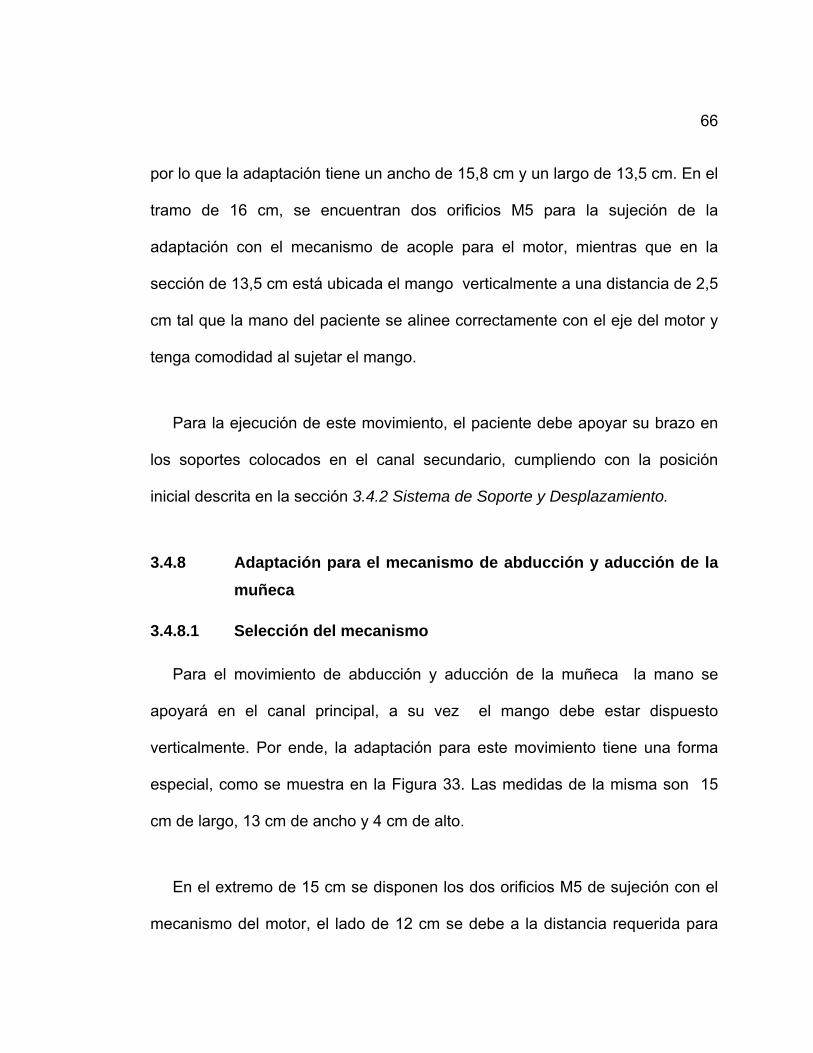
66
por lo que la adaptación tiene un ancho de 15,8 cm y un largo de 13,5 cm. En el
tramo de 16 cm, se encuentran dos orificios M5 para la sujeción de la
adaptación con el mecanismo de acople para el motor, mientras que en la
sección de 13,5 cm está ubicada el mango verticalmente a una distancia de 2,5
cm tal que la mano del paciente se alinee correctamente con el eje del motor y
tenga comodidad al sujetar el mango.
Para la ejecución de este movimiento, el paciente debe apoyar su brazo en
los soportes colocados en el canal secundario, cumpliendo con la posición
inicial descrita en la sección 3.4.2 Sistema de Soporte y Desplazamiento.
3.4.8 Adaptación para el mecanismo de abducción y aducción de la
muñeca
3.4.8.1 Selección del mecanismo
Para el movimiento de abducción y aducción de la muñeca la mano se
apoyará en el canal principal, a su vez el mango debe estar dispuesto
verticalmente. Por ende, la adaptación para este movimiento tiene una forma
especial, como se muestra en la Figura 33. Las medidas de la misma son 15
cm de largo, 13 cm de ancho y 4 cm de alto.
En el extremo de 15 cm se disponen los dos orificios M5 de sujeción con el
mecanismo del motor, el lado de 12 cm se debe a la distancia requerida para
67
alinear los soportes ubicados en el canal principal con la mano y el mango, y los
6 cm de altura fueron determinados en base al requerimiento de alineación del
eje de la articulación de la muñeca con el eje del motor permitiendo al paciente
sujetar cómodamente el mango durante el movimiento.
Figura 33 Adaptación del mecanismo para la abducción y aducción del motor.
Fuente: Elaborado por autoras de la investigación.
3.4.9 Adaptación para el mecanismo de la flexión y extensión de la
muñeca
3.4.9.1 Selección del mecanismo
Para el movimiento de flexión y extensión de la muñeca se utiliza una
adaptación en forma de L, sin embrago sus medidas son diferentes ya que la
posición del mango pasa a ser horizontal para la ejecución del movimiento de
manera que el ejercicio de rehabilitación se pueda llevar a cabo correctamente.
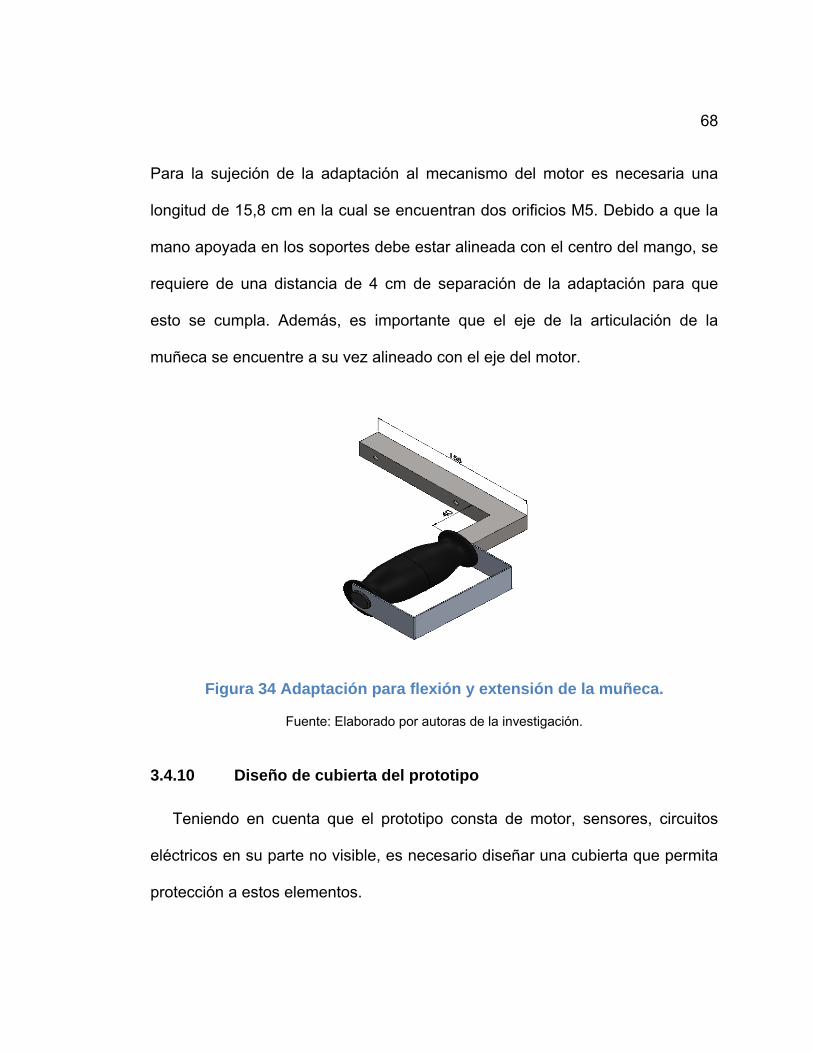
68
Para la sujeción de la adaptación al mecanismo del motor es necesaria una
longitud de 15,8 cm en la cual se encuentran dos orificios M5. Debido a que la
mano apoyada en los soportes debe estar alineada con el centro del mango, se
requiere de una distancia de 4 cm de separación de la adaptación para que
esto se cumpla. Además, es importante que el eje de la articulación de la
muñeca se encuentre a su vez alineado con el eje del motor.
Figura 34 Adaptación para flexión y extensión de la muñeca.
Fuente: Elaborado por autoras de la investigación.
3.4.10 Diseño de cubierta del prototipo
Teniendo en cuenta que el prototipo consta de motor, sensores, circuitos
eléctricos en su parte no visible, es necesario diseñar una cubierta que permita
protección a estos elementos.
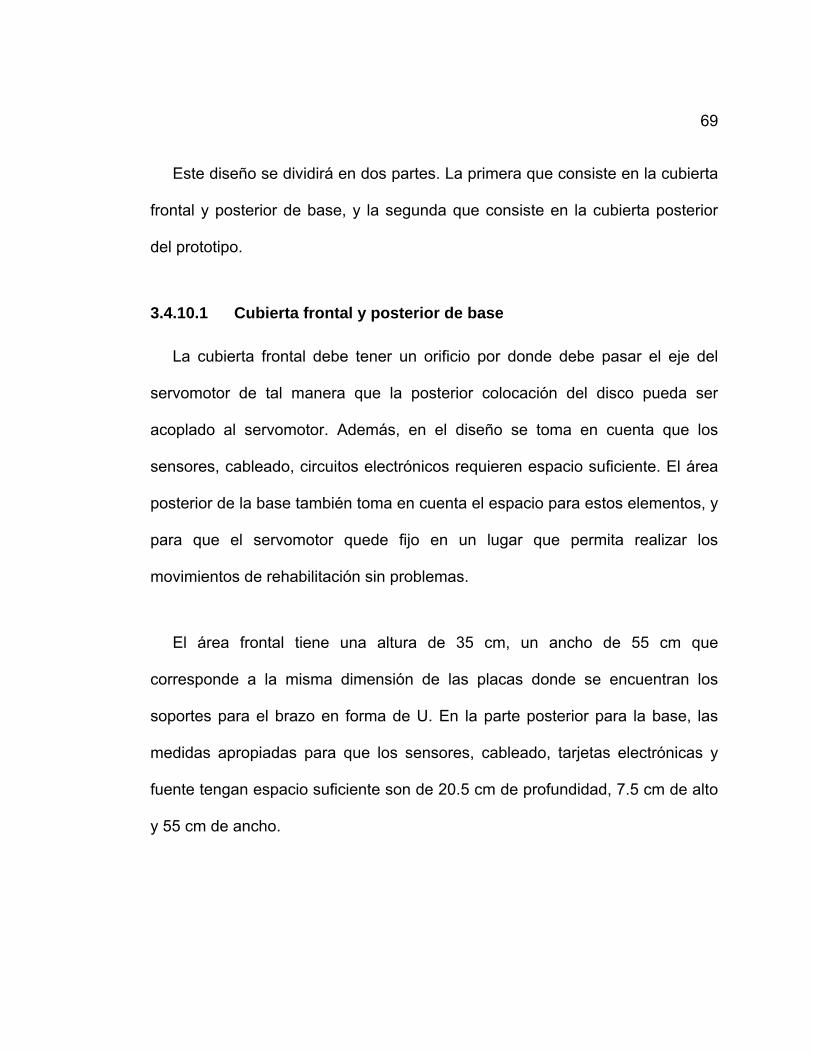
69
Este diseño se dividirá en dos partes. La primera que consiste en la cubierta
frontal y posterior de base, y la segunda que consiste en la cubierta posterior
del prototipo.
3.4.10.1 Cubierta frontal y posterior de base
La cubierta frontal debe tener un orificio por donde debe pasar el eje del
servomotor de tal manera que la posterior colocación del disco pueda ser
acoplado al servomotor. Además, en el diseño se toma en cuenta que los
sensores, cableado, circuitos electrónicos requieren espacio suficiente. El área
posterior de la base también toma en cuenta el espacio para estos elementos, y
para que el servomotor quede fijo en un lugar que permita realizar los
movimientos de rehabilitación sin problemas.
El área frontal tiene una altura de 35 cm, un ancho de 55 cm que
corresponde a la misma dimensión de las placas donde se encuentran los
soportes para el brazo en forma de U. En la parte posterior para la base, las
medidas apropiadas para que los sensores, cableado, tarjetas electrónicas y
fuente tengan espacio suficiente son de 20.5 cm de profundidad, 7.5 cm de alto
y 55 cm de ancho.
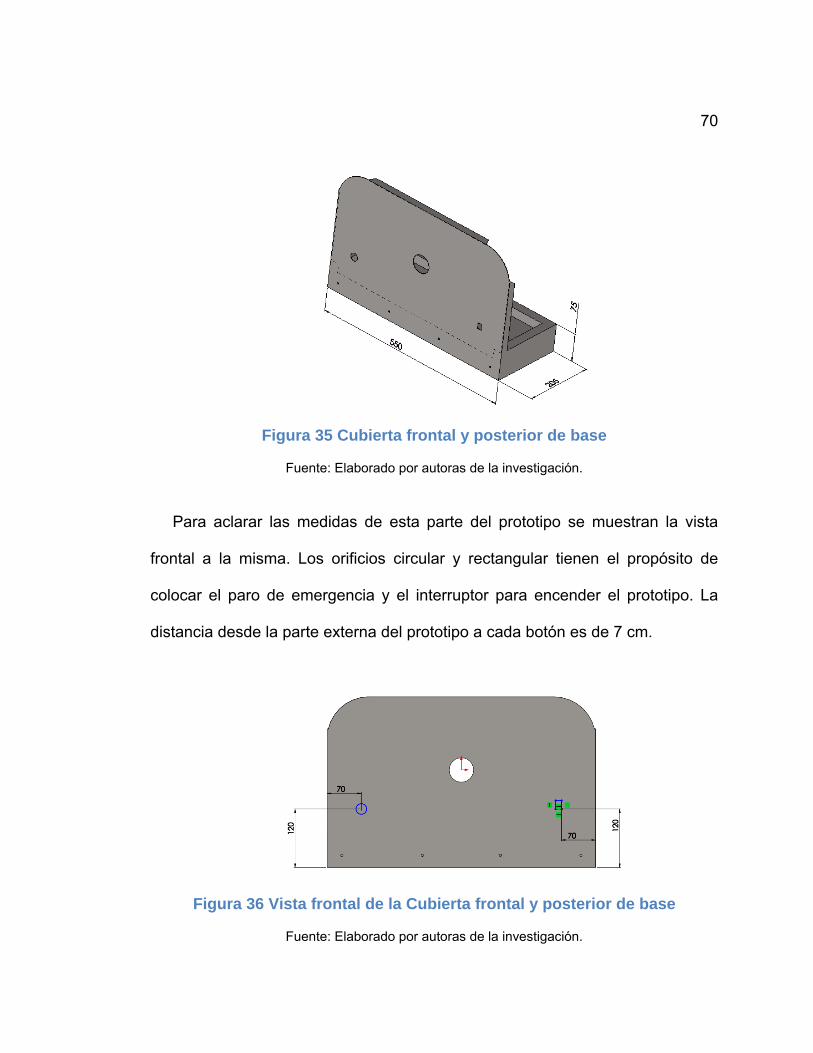
70
Figura 35 Cubierta frontal y posterior de base
Fuente: Elaborado por autoras de la investigación.
Para aclarar las medidas de esta parte del prototipo se muestran la vista
frontal a la misma. Los orificios circular y rectangular tienen el propósito de
colocar el paro de emergencia y el interruptor para encender el prototipo. La
distancia desde la parte externa del prototipo a cada botón es de 7 cm.
Figura 36 Vista frontal de la Cubierta frontal y posterior de base
Fuente: Elaborado por autoras de la investigación.
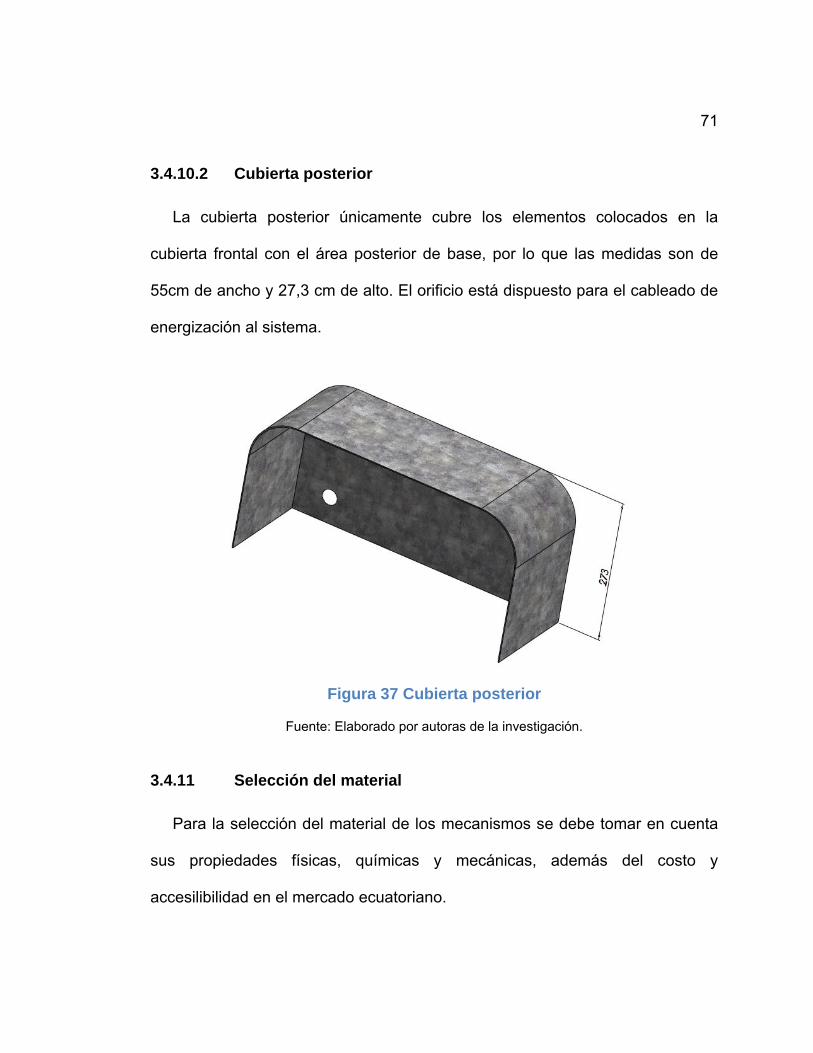
71
3.4.10.2 Cubierta posterior
La cubierta posterior únicamente cubre los elementos colocados en la
cubierta frontal con el área posterior de base, por lo que las medidas son de
55cm de ancho y 27,3 cm de alto. El orificio está dispuesto para el cableado de
energización al sistema.
Figura 37 Cubierta posterior
Fuente: Elaborado por autoras de la investigación.
3.4.11 Selección del material
Para la selección del material de los mecanismos se debe tomar en cuenta
sus propiedades físicas, químicas y mecánicas, además del costo y
accesilibilidad en el mercado ecuatoriano.

72
Tabla 17 Propiedades del Acero y Aluminio
Propiedad Aluminio Acero
Módulo de Young 6,3 - 7 10 / 19,5 - 20,5 10 /
Módulo elastico transversal
26300 MPa 8100 MPa
Dureza Brinell 21 - 240 HB 180 - 270 HB
Límite elástico 3,47 - 40,79 / 18 - 65 /
Resistencia a la tracción
9,18 - 47,93 / 45 - 92 /
Coeficiente de Poisson
0,33 0,3
Densidad 2700 / 7850 /
Fuente: (Propiedades Aluminio, 2013)
Además de las propiedades físicas se consideran las características más
relevantes para la fabricación de las piezas requeridas, mediante estas se
evalúa cuantitativamente a los materiales propuestos para finalmente
seleccionar el material que obtenga un mayor puntaje. La valoración de las
propiedades se realiza de acuerdo a la Tabla 18.
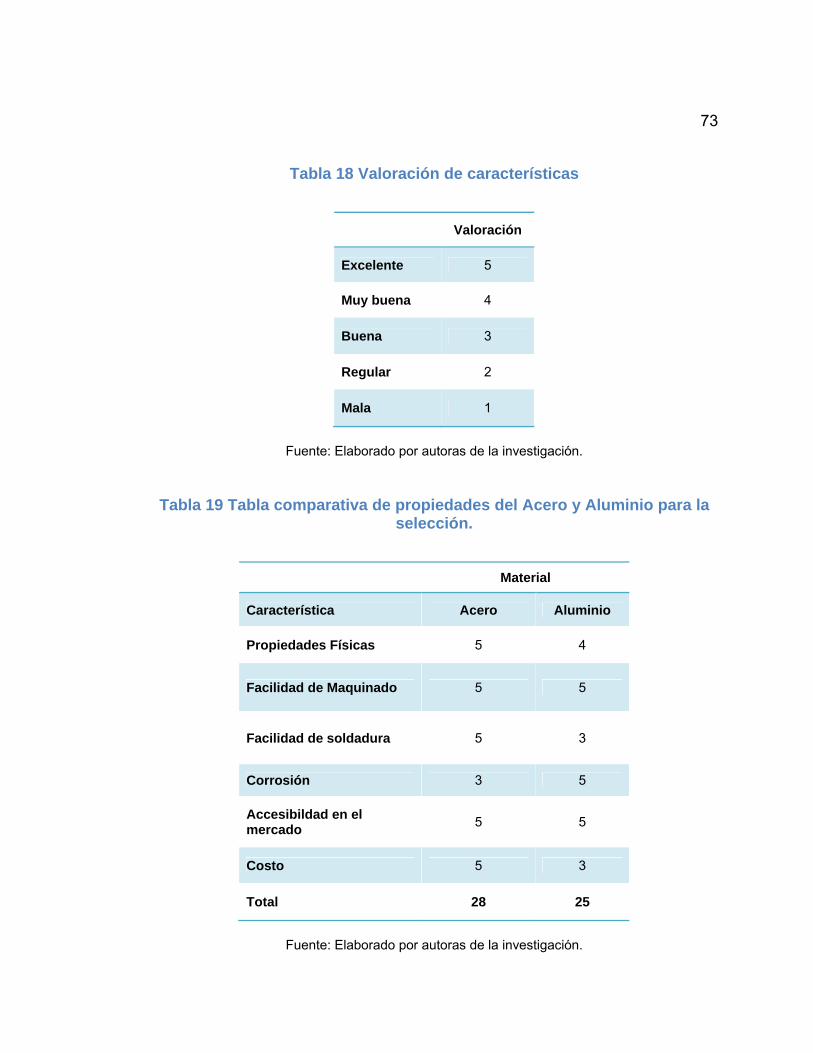
73
Tabla 18 Valoración de características
Valoración
Excelente 5
Muy buena 4
Buena 3
Regular 2
Mala 1
Fuente: Elaborado por autoras de la investigación.
Tabla 19 Tabla comparativa de propiedades del Acero y Aluminio para la selección.
Material
Característica Acero Aluminio
Propiedades Físicas 5 4
Facilidad de Maquinado 5 5
Facilidad de soldadura 5 3
Corrosión 3 5
Accesibildad en el mercado
5 5
Costo 5 3
Total 28 25
Fuente: Elaborado por autoras de la investigación.
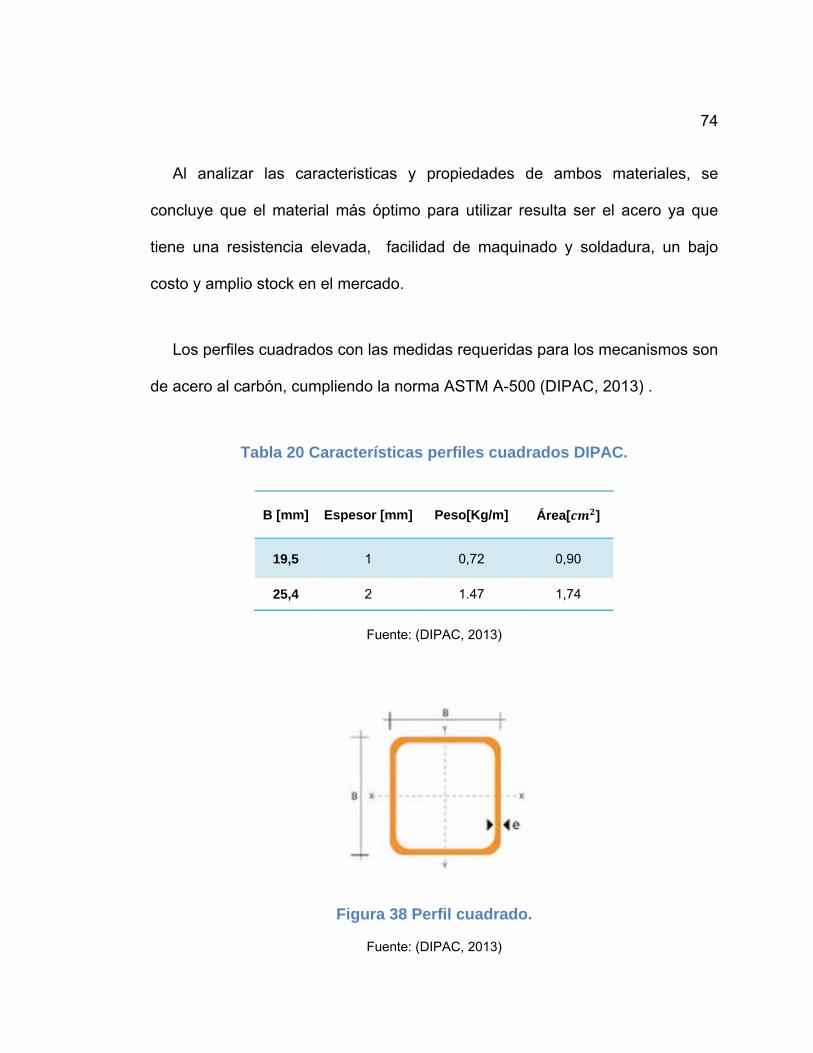
74
Al analizar las caracteristicas y propiedades de ambos materiales, se
concluye que el material más óptimo para utilizar resulta ser el acero ya que
tiene una resistencia elevada, facilidad de maquinado y soldadura, un bajo
costo y amplio stock en el mercado.
Los perfiles cuadrados con las medidas requeridas para los mecanismos son
de acero al carbón, cumpliendo la norma ASTM A-500 (DIPAC, 2013) .
Tabla 20 Características perfiles cuadrados DIPAC.
B [mm] Espesor [mm] Peso[Kg/m] Área[ ]
19,5 1 0,72 0,90
25,4 2 1.47 1,74
Fuente: (DIPAC, 2013)
Figura 38 Perfil cuadrado.
Fuente: (DIPAC, 2013)
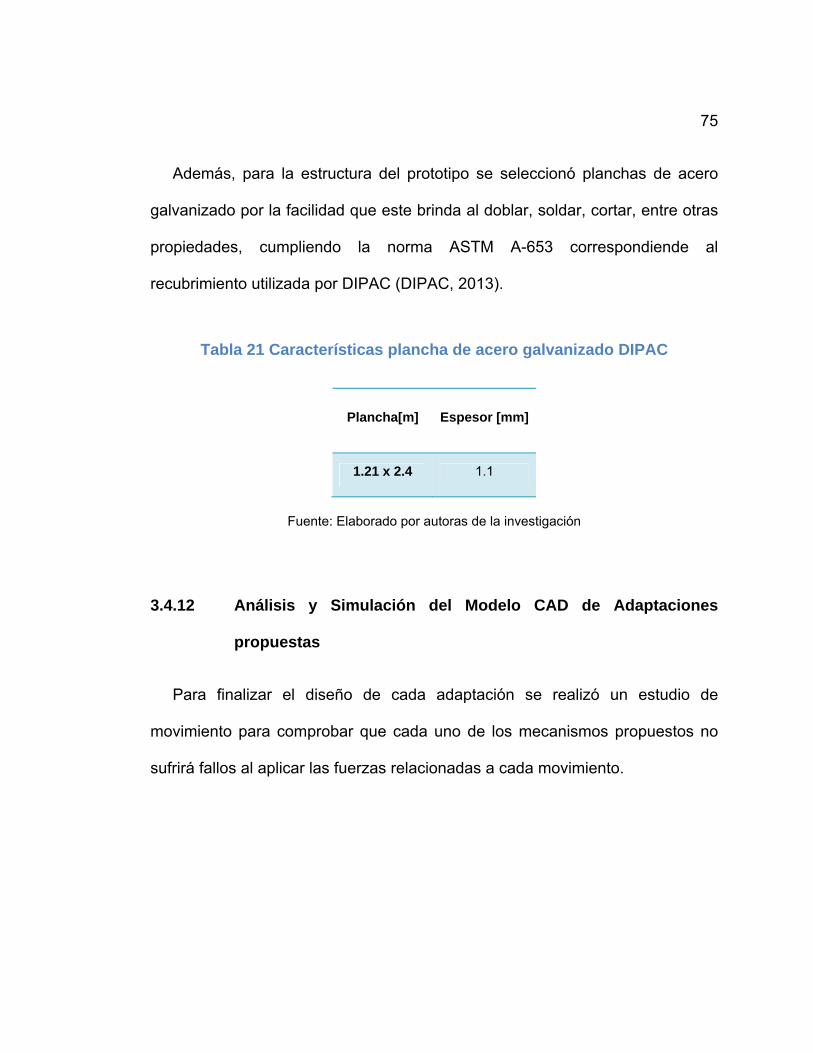
75
Además, para la estructura del prototipo se seleccionó planchas de acero
galvanizado por la facilidad que este brinda al doblar, soldar, cortar, entre otras
propiedades, cumpliendo la norma ASTM A-653 correspondiende al
recubrimiento utilizada por DIPAC (DIPAC, 2013).
Tabla 21 Características plancha de acero galvanizado DIPAC
Plancha[m] Espesor [mm]
1.21 x 2.4 1.1
Fuente: Elaborado por autoras de la investigación
3.4.12 Análisis y Simulación del Modelo CAD de Adaptaciones
propuestas
Para finalizar el diseño de cada adaptación se realizó un estudio de
movimiento para comprobar que cada uno de los mecanismos propuestos no
sufrirá fallos al aplicar las fuerzas relacionadas a cada movimiento.
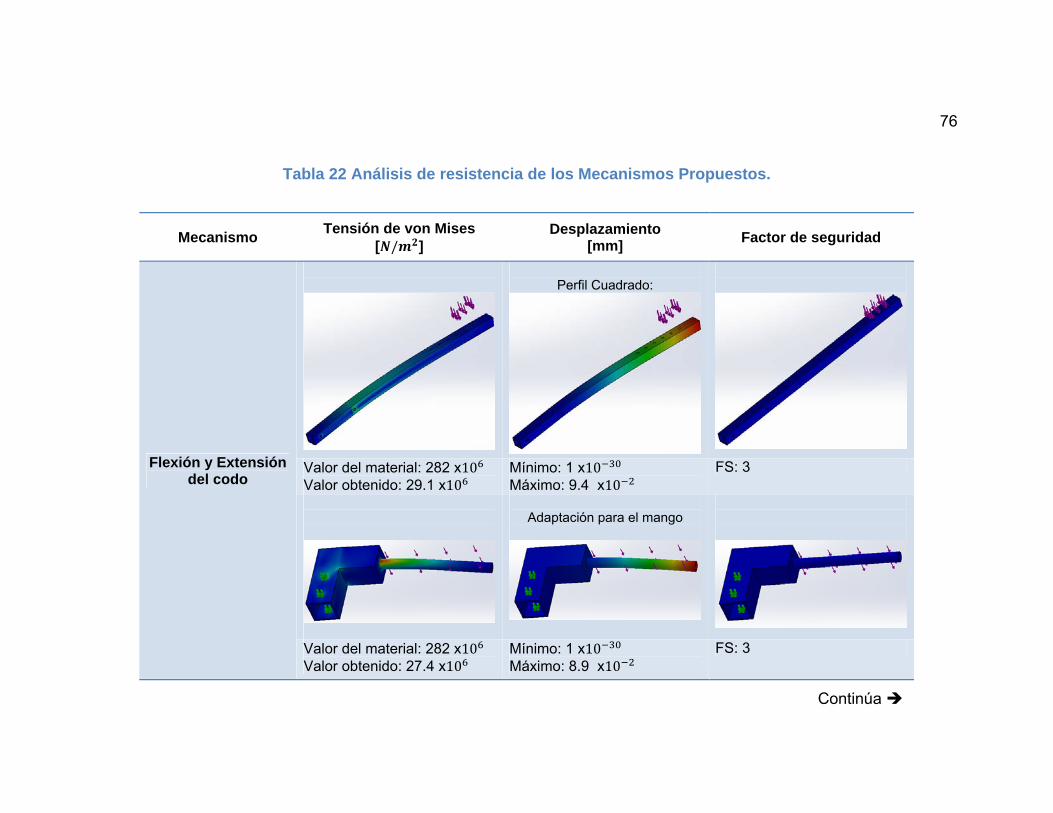
76
Tabla 22 Análisis de resistencia de los Mecanismos Propuestos.
Mecanismo Tensión de von Mises
[ / ] Desplazamiento
[mm] Factor de seguridad
Flexión y Extensión del codo
Perfil Cuadrado:
Valor del material: 282 x10 Valor obtenido: 29.1 x10
Mínimo: 1 x10 Máximo: 9.4 x10
FS: 3
Adaptación para el mango
Valor del material: 282 x10 Valor obtenido: 27.4 x10
Mínimo: 1 x10 Máximo: 8.9 x10
FS: 3
Continúa
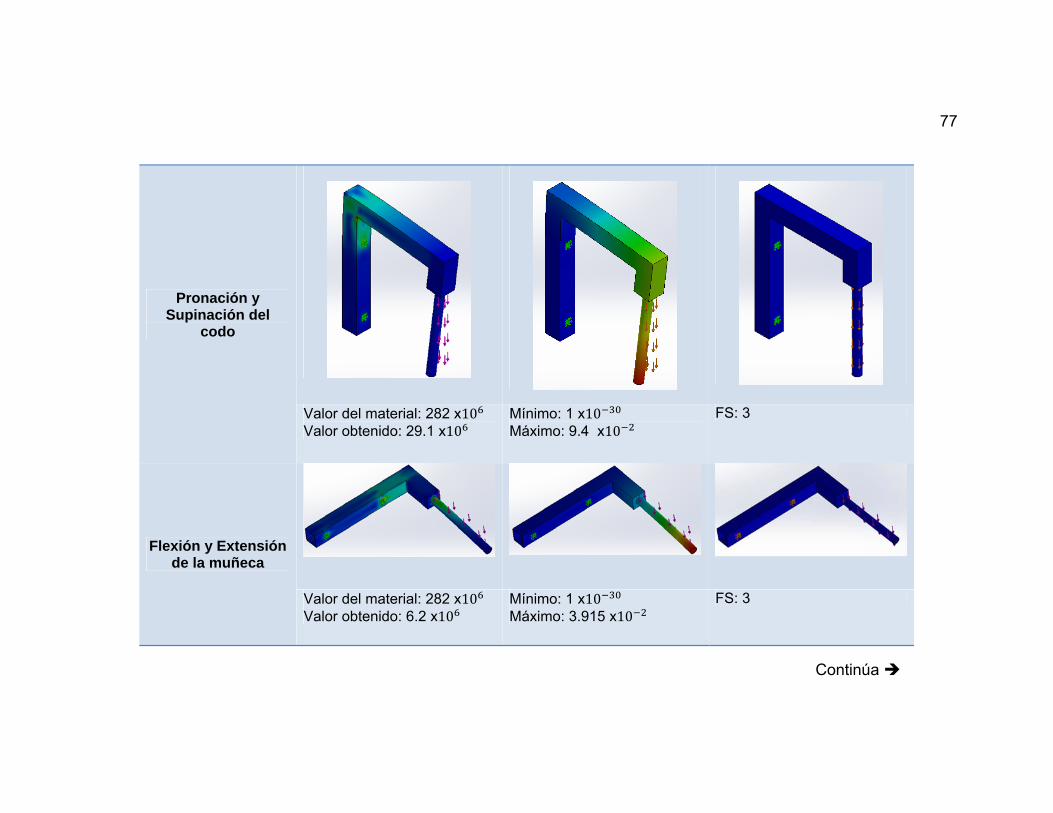
77
Pronación y Supinación del
codo
Valor del material: 282 x10 Valor obtenido: 29.1 x10
Mínimo: 1 x10 Máximo: 9.4 x10
FS: 3
Flexión y Extensión de la muñeca
Valor del material: 282 x10 Valor obtenido: 6.2 x10
Mínimo: 1 x10 Máximo: 3.915 x10
FS: 3
Continúa

78
Abducción y Aducción de la
muñeca
Valor del material: 282 x10 Valor obtenido: 9.3 x10
Mínimo: 1 x10 Máximo: 2.4 x10
FS: 3
Fuente: Elaborado por autoras de la investigación
79
Al haber realizado el análisis de resistencia de cada una de las
adaptaciones resumida en la Tabla 22, se observa que en el estudio de
Tensión de von Mises el Acero tiene un valor de 282 10 / mientras
que las adaptaciones está muy debajo de este valor, siendo el más alto el
de la adaptación para la flexión-extensión del codo con 29.1 10 / .
Observando los resultados respecto del desplazamiento provocado por la
fuerza que interviene en cada adaptación, se nota que el desplazamiento
máximo lo sufren las adaptaciones de flexión-extensión y pronación-
supinación del codo con 9.4 10 . Sin embargo, este valor es muy bajo,
por lo que no representa un posible daño en la adaptación al momento de
aplicar la fuerza.
En todas las adaptaciones se utilizó un factor de seguridad de 3, con la
finalidad de prevenir que las adaptaciones no sufran daño alguno al
someterse a la fuerza que interviene. Cabe recalcar, que el factor de
seguridad de 3 pese a ser un valor excesivamente alto para la funcionalidad
que tienen las adaptaciones, no se ve que éstas tengan zonas de ruptura.
80
3.5 Diseño Electrónico
3.5.1 Herramientas de Desarrollo
3.5.1.1 ISIS
Herramienta que permite diseñar el plano eléctrico del circuito que se
desea realizar con componentes variados, desde resistencias, hasta
microprocesadores, incluyendo fuentes de alimentación, generadores de
señales y diversos componentes con prestaciones diferentes. Los diseños
realizados en Isis pueden ser simulados en tiempo real.
3.5.1.2 Ares
Programa utilizado para la fabricación de placas de circuito impreso,
posee herramienta de enrutado, ubicación y edición de componentes,
permitiendo editar generalmente, la capa superficial y de soldadura.
3.5.2 Diseño del Sistema Electrónico
Para el desarrollo del circuito electrónico de debe considerar el número
de señales electrónicas de los diferentes sensores y actuadores, además
del tipo de señal de las mismas, es decir, digitales o analógicas, para lo cual
se elaboró la Tabla 23 donde se enuncia dichos requerimientos.
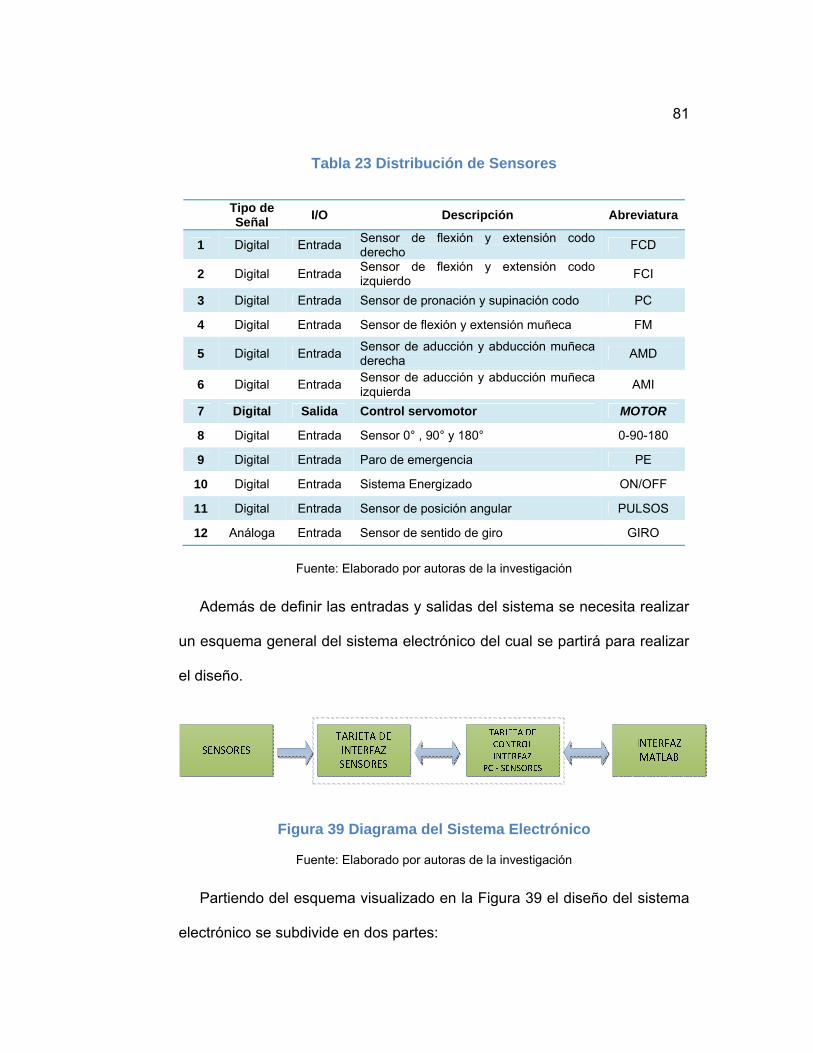
81
Tabla 23 Distribución de Sensores
Tipo de Señal
I/O Descripción Abreviatura
1 Digital Entrada Sensor de flexión y extensión codo derecho
FCD
2 Digital Entrada Sensor de flexión y extensión codo izquierdo
FCI
3 Digital Entrada Sensor de pronación y supinación codo PC
4 Digital Entrada Sensor de flexión y extensión muñeca FM
5 Digital Entrada Sensor de aducción y abducción muñeca derecha
AMD
6 Digital Entrada Sensor de aducción y abducción muñeca izquierda
AMI
7 Digital Salida Control servomotor MOTOR
8 Digital Entrada Sensor 0° , 90° y 180° 0-90-180
9 Digital Entrada Paro de emergencia PE
10 Digital Entrada Sistema Energizado ON/OFF
11 Digital Entrada Sensor de posición angular PULSOS
12 Análoga Entrada Sensor de sentido de giro GIRO
Fuente: Elaborado por autoras de la investigación
Además de definir las entradas y salidas del sistema se necesita realizar
un esquema general del sistema electrónico del cual se partirá para realizar
el diseño.
Figura 39 Diagrama del Sistema Electrónico
Fuente: Elaborado por autoras de la investigación
Partiendo del esquema visualizado en la Figura 39 el diseño del sistema
electrónico se subdivide en dos partes:
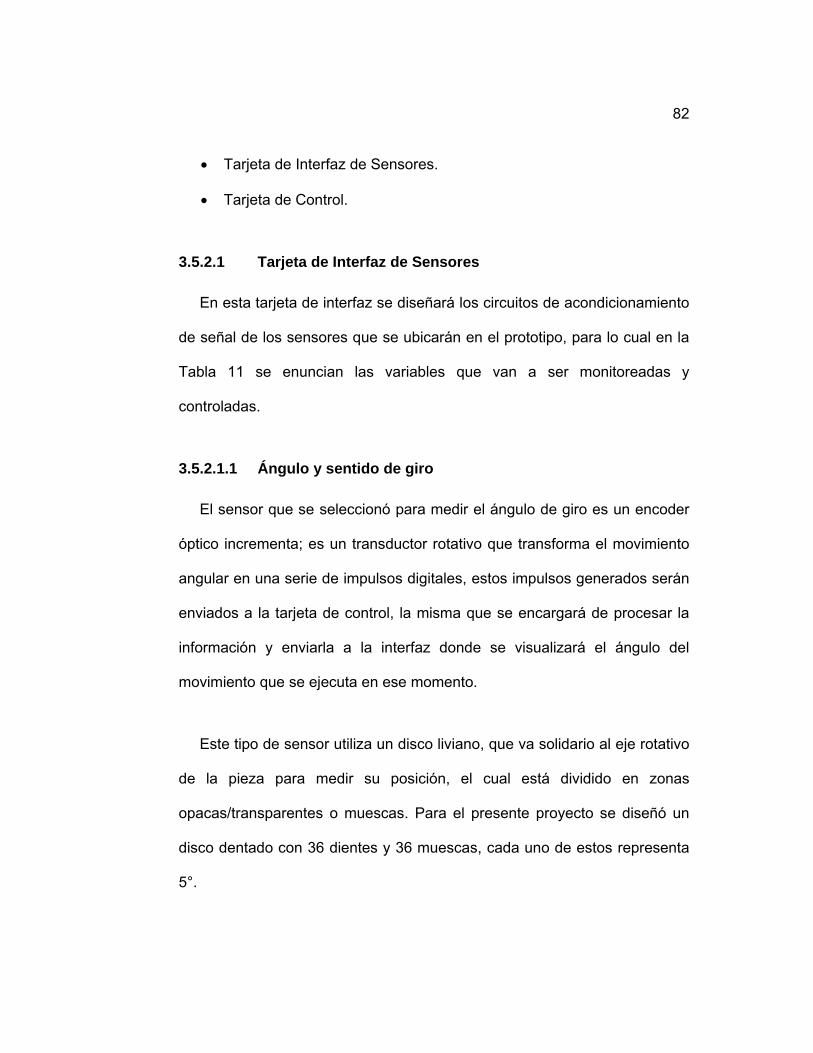
82
Tarjeta de Interfaz de Sensores.
Tarjeta de Control.
3.5.2.1 Tarjeta de Interfaz de Sensores
En esta tarjeta de interfaz se diseñará los circuitos de acondicionamiento
de señal de los sensores que se ubicarán en el prototipo, para lo cual en la
Tabla 11 se enuncian las variables que van a ser monitoreadas y
controladas.
3.5.2.1.1 Ángulo y sentido de giro
El sensor que se seleccionó para medir el ángulo de giro es un encoder
óptico incrementa; es un transductor rotativo que transforma el movimiento
angular en una serie de impulsos digitales, estos impulsos generados serán
enviados a la tarjeta de control, la misma que se encargará de procesar la
información y enviarla a la interfaz donde se visualizará el ángulo del
movimiento que se ejecuta en ese momento.
Este tipo de sensor utiliza un disco liviano, que va solidario al eje rotativo
de la pieza para medir su posición, el cual está dividido en zonas
opacas/transparentes o muescas. Para el presente proyecto se diseñó un
disco dentado con 36 dientes y 36 muescas, cada uno de estos representa
5°.
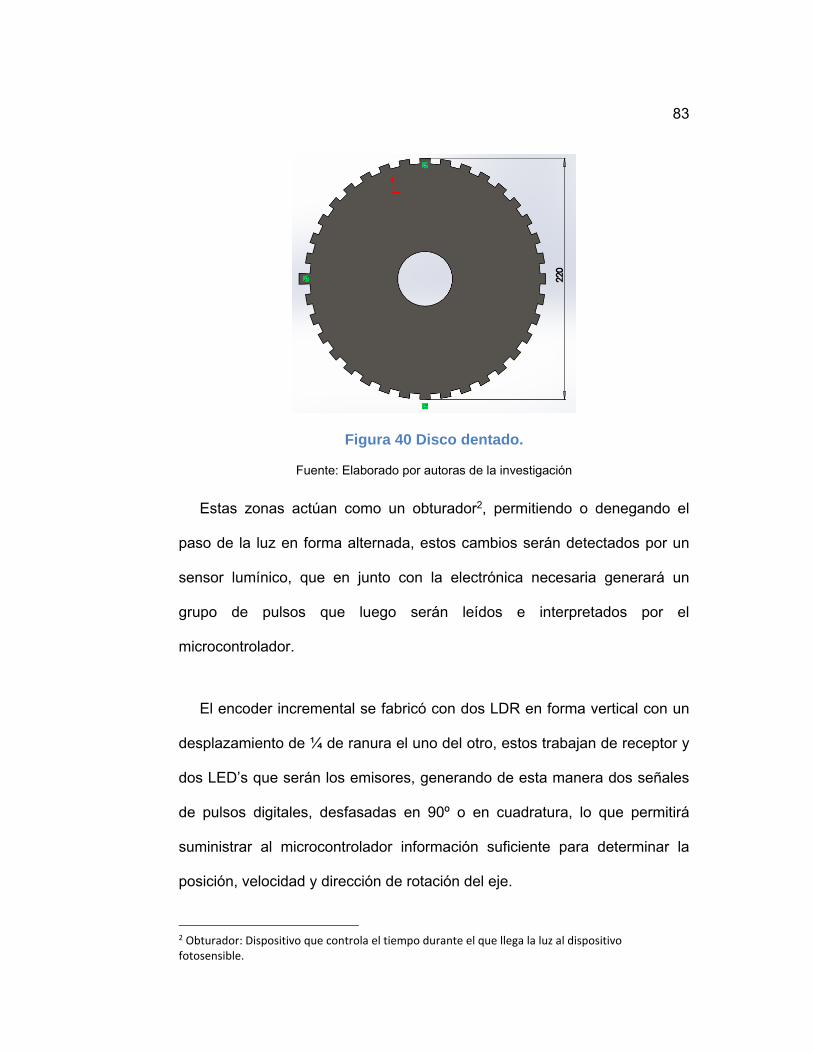
83
Figura 40 Disco dentado.
Fuente: Elaborado por autoras de la investigación
Estas zonas actúan como un obturador2, permitiendo o denegando el
paso de la luz en forma alternada, estos cambios serán detectados por un
sensor lumínico, que en junto con la electrónica necesaria generará un
grupo de pulsos que luego serán leídos e interpretados por el
microcontrolador.
El encoder incremental se fabricó con dos LDR en forma vertical con un
desplazamiento de ¼ de ranura el uno del otro, estos trabajan de receptor y
dos LED’s que serán los emisores, generando de esta manera dos señales
de pulsos digitales, desfasadas en 90º o en cuadratura, lo que permitirá
suministrar al microcontrolador información suficiente para determinar la
posición, velocidad y dirección de rotación del eje.
2 Obturador: Dispositivo que controla el tiempo durante el que llega la luz al dispositivo fotosensible.
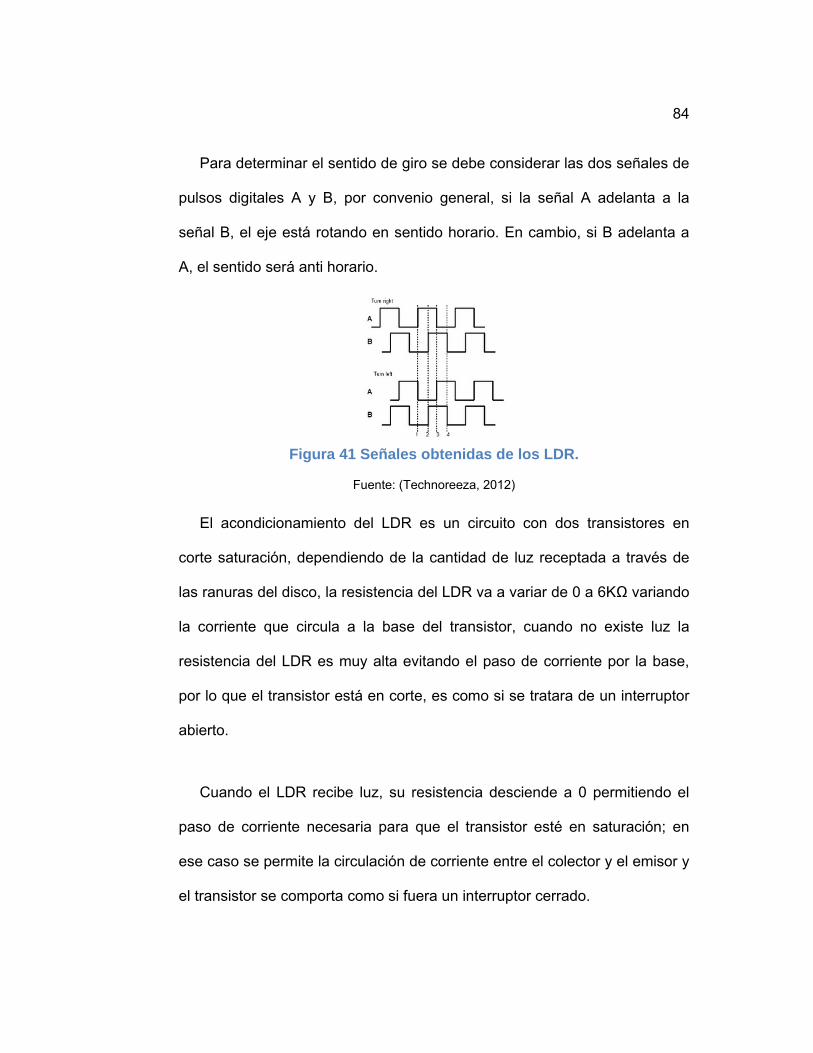
84
Para determinar el sentido de giro se debe considerar las dos señales de
pulsos digitales A y B, por convenio general, si la señal A adelanta a la
señal B, el eje está rotando en sentido horario. En cambio, si B adelanta a
A, el sentido será anti horario.
Figura 41 Señales obtenidas de los LDR.
Fuente: (Technoreeza, 2012)
El acondicionamiento del LDR es un circuito con dos transistores en
corte saturación, dependiendo de la cantidad de luz receptada a través de
las ranuras del disco, la resistencia del LDR va a variar de 0 a 6KΩ variando
la corriente que circula a la base del transistor, cuando no existe luz la
resistencia del LDR es muy alta evitando el paso de corriente por la base,
por lo que el transistor está en corte, es como si se tratara de un interruptor
abierto.
Cuando el LDR recibe luz, su resistencia desciende a 0 permitiendo el
paso de corriente necesaria para que el transistor esté en saturación; en
ese caso se permite la circulación de corriente entre el colector y el emisor y
el transistor se comporta como si fuera un interruptor cerrado.
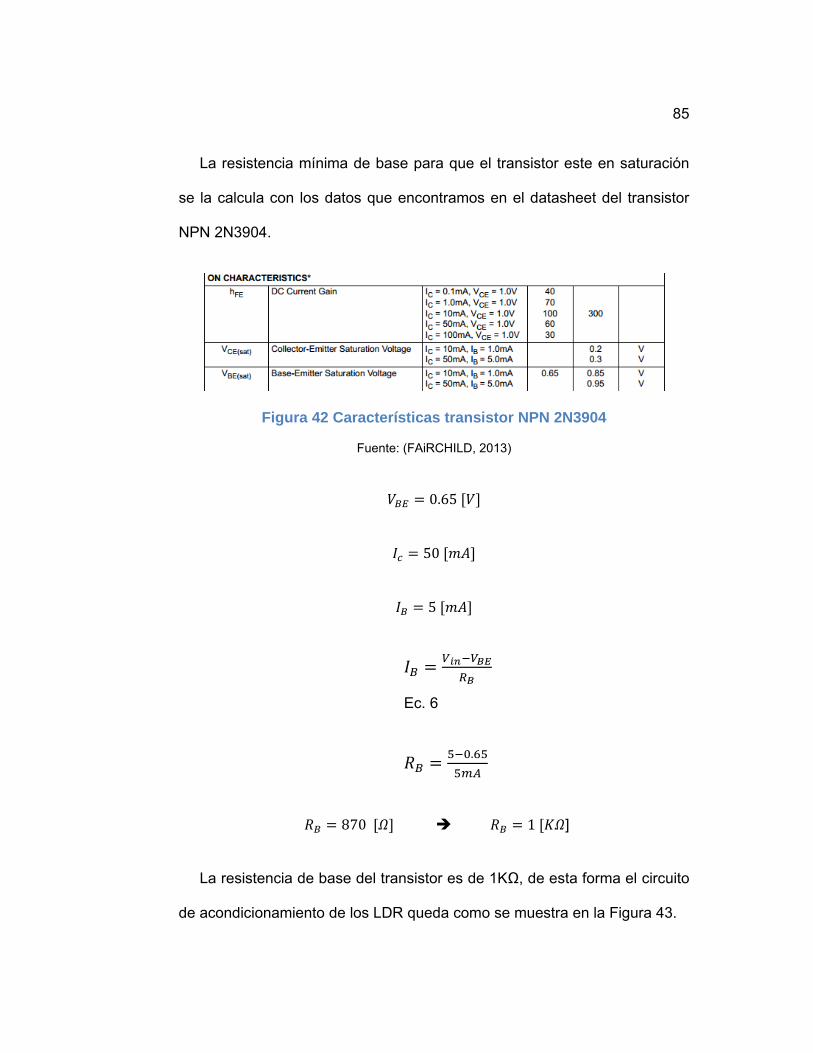
85
La resistencia mínima de base para que el transistor este en saturación
se la calcula con los datos que encontramos en el datasheet del transistor
NPN 2N3904.
Figura 42 Características transistor NPN 2N3904
Fuente: (FAiRCHILD, 2013)
0.65
50
5
Ec. 6
.
870 1 ]
La resistencia de base del transistor es de 1KΩ, de esta forma el circuito
de acondicionamiento de los LDR queda como se muestra en la Figura 43.
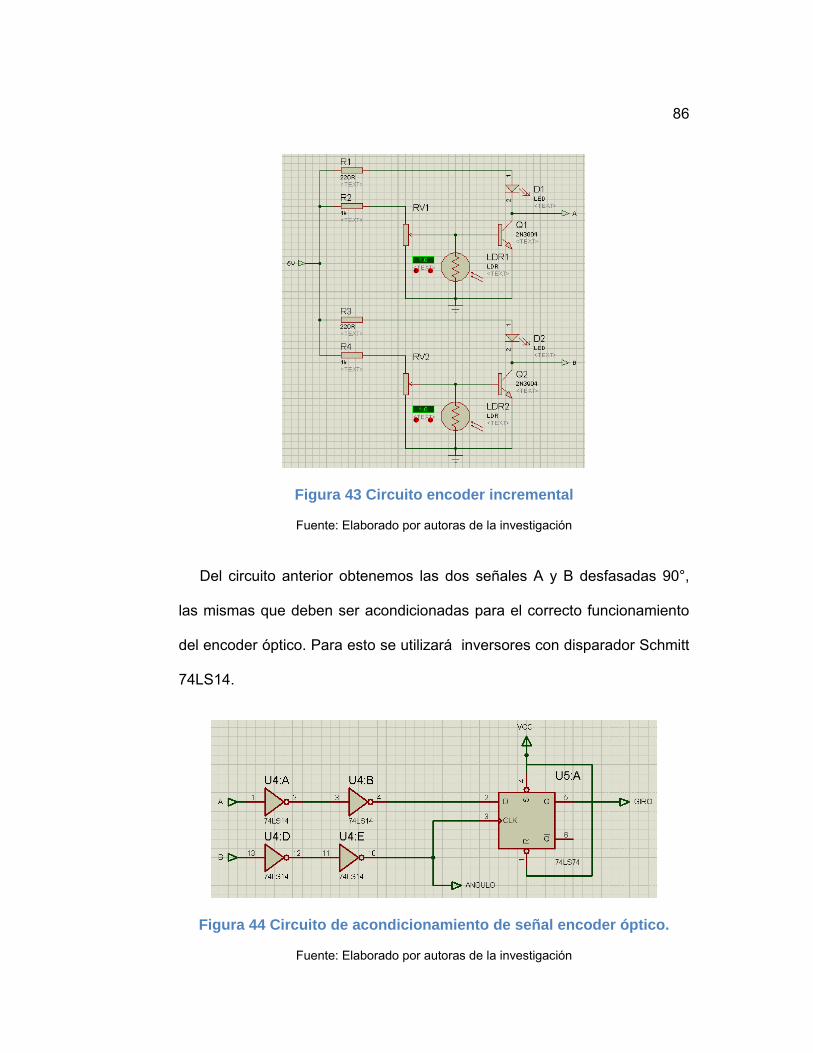
86
Figura 43 Circuito encoder incremental
Fuente: Elaborado por autoras de la investigación
Del circuito anterior obtenemos las dos señales A y B desfasadas 90°,
las mismas que deben ser acondicionadas para el correcto funcionamiento
del encoder óptico. Para esto se utilizará inversores con disparador Schmitt
74LS14.
Figura 44 Circuito de acondicionamiento de señal encoder óptico.
Fuente: Elaborado por autoras de la investigación
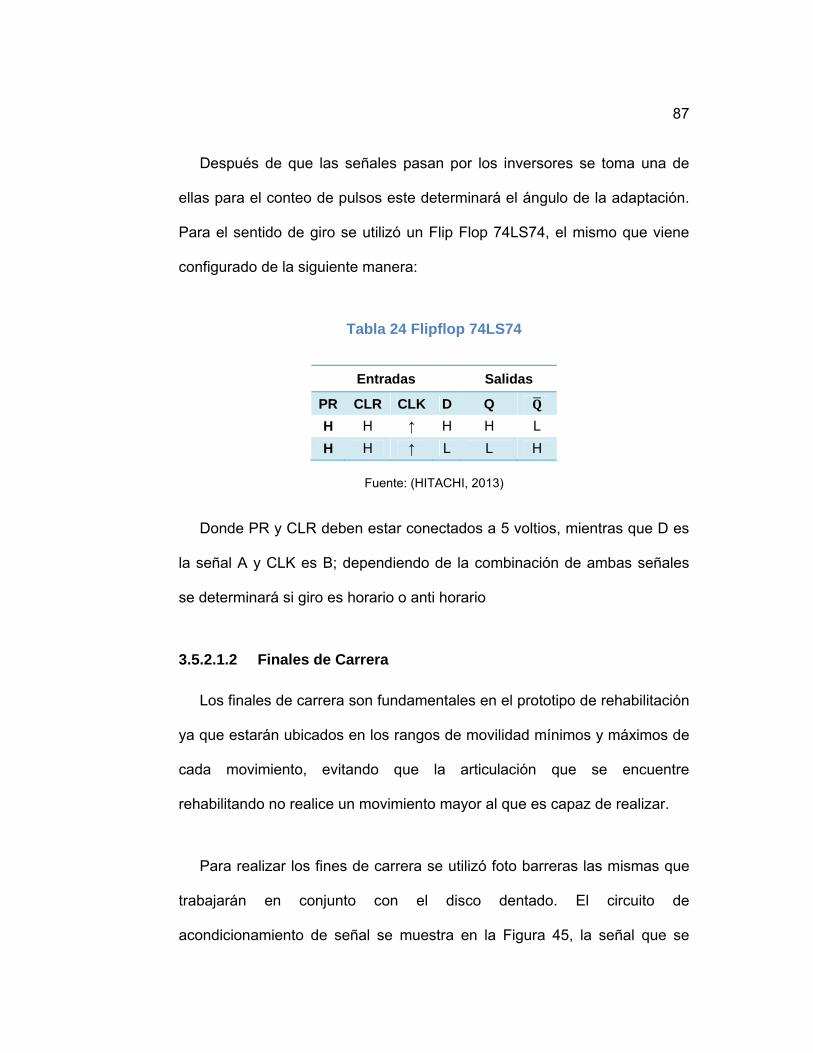
87
Después de que las señales pasan por los inversores se toma una de
ellas para el conteo de pulsos este determinará el ángulo de la adaptación.
Para el sentido de giro se utilizó un Flip Flop 74LS74, el mismo que viene
configurado de la siguiente manera:
Tabla 24 Flipflop 74LS74
Entradas Salidas
PR CLR CLK D Q
H H ↑ H H L
H H ↑ L L H
Fuente: (HITACHI, 2013)
Donde PR y CLR deben estar conectados a 5 voltios, mientras que D es
la señal A y CLK es B; dependiendo de la combinación de ambas señales
se determinará si giro es horario o anti horario
3.5.2.1.2 Finales de Carrera
Los finales de carrera son fundamentales en el prototipo de rehabilitación
ya que estarán ubicados en los rangos de movilidad mínimos y máximos de
cada movimiento, evitando que la articulación que se encuentre
rehabilitando no realice un movimiento mayor al que es capaz de realizar.
Para realizar los fines de carrera se utilizó foto barreras las mismas que
trabajarán en conjunto con el disco dentado. El circuito de
acondicionamiento de señal se muestra en la Figura 45, la señal que se
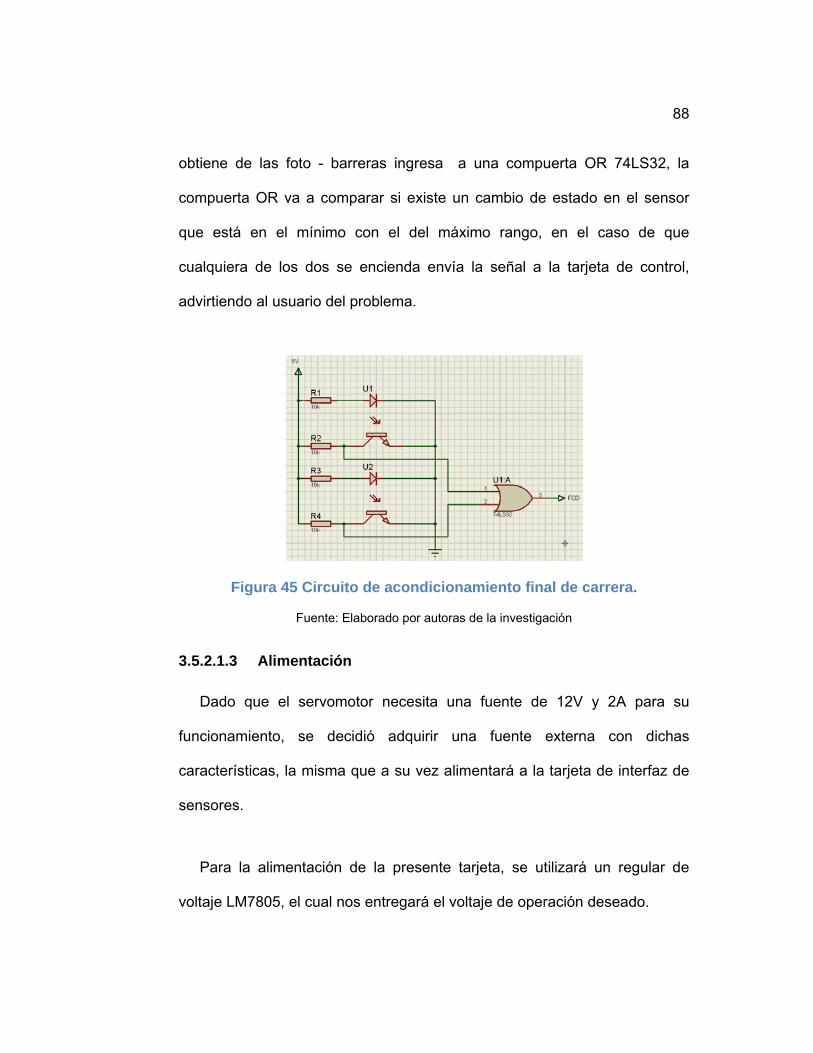
88
obtiene de las foto - barreras ingresa a una compuerta OR 74LS32, la
compuerta OR va a comparar si existe un cambio de estado en el sensor
que está en el mínimo con el del máximo rango, en el caso de que
cualquiera de los dos se encienda envía la señal a la tarjeta de control,
advirtiendo al usuario del problema.
Figura 45 Circuito de acondicionamiento final de carrera.
Fuente: Elaborado por autoras de la investigación
3.5.2.1.3 Alimentación
Dado que el servomotor necesita una fuente de 12V y 2A para su
funcionamiento, se decidió adquirir una fuente externa con dichas
características, la misma que a su vez alimentará a la tarjeta de interfaz de
sensores.
Para la alimentación de la presente tarjeta, se utilizará un regular de
voltaje LM7805, el cual nos entregará el voltaje de operación deseado.
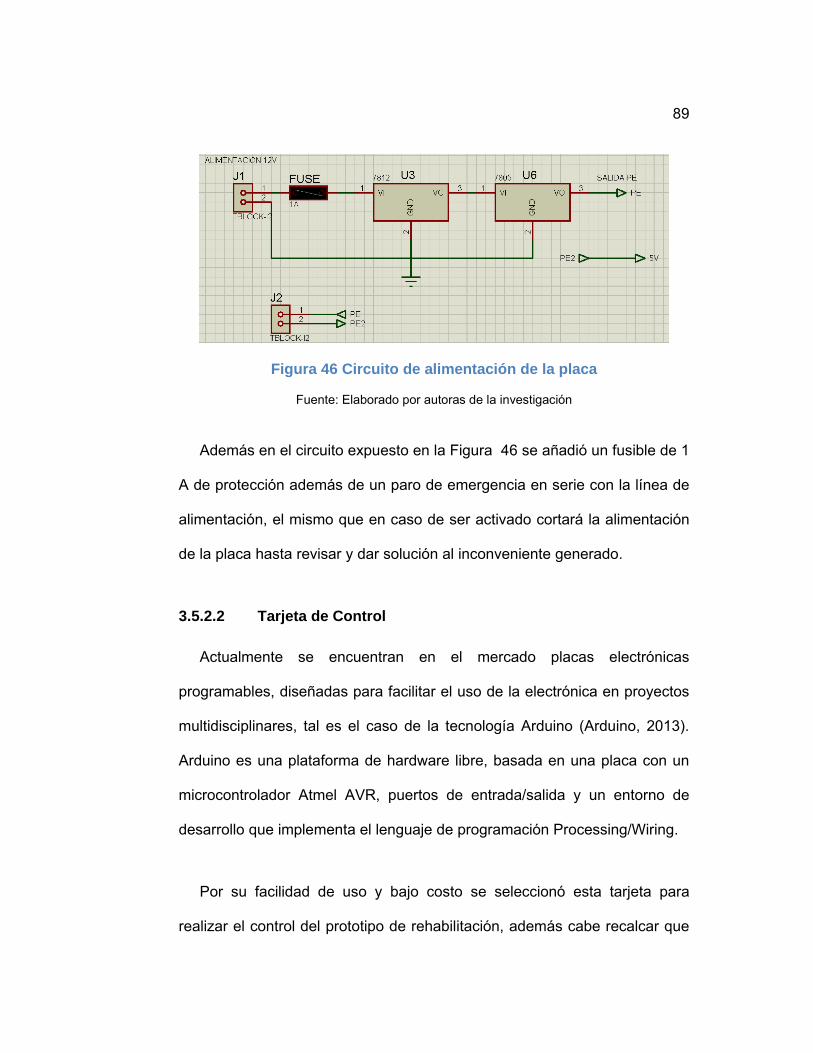
89
Figura 46 Circuito de alimentación de la placa
Fuente: Elaborado por autoras de la investigación
Además en el circuito expuesto en la Figura 46 se añadió un fusible de 1
A de protección además de un paro de emergencia en serie con la línea de
alimentación, el mismo que en caso de ser activado cortará la alimentación
de la placa hasta revisar y dar solución al inconveniente generado.
3.5.2.2 Tarjeta de Control
Actualmente se encuentran en el mercado placas electrónicas
programables, diseñadas para facilitar el uso de la electrónica en proyectos
multidisciplinares, tal es el caso de la tecnología Arduino (Arduino, 2013).
Arduino es una plataforma de hardware libre, basada en una placa con un
microcontrolador Atmel AVR, puertos de entrada/salida y un entorno de
desarrollo que implementa el lenguaje de programación Processing/Wiring.
Por su facilidad de uso y bajo costo se seleccionó esta tarjeta para
realizar el control del prototipo de rehabilitación, además cabe recalcar que
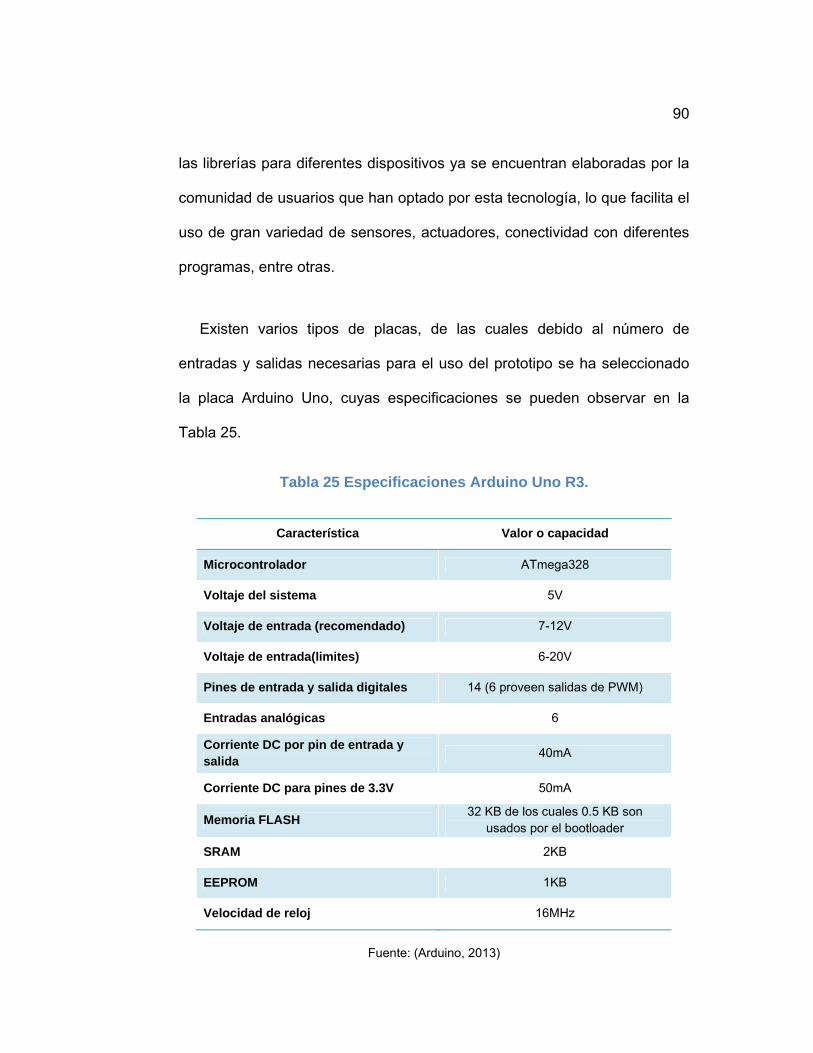
90
las librerías para diferentes dispositivos ya se encuentran elaboradas por la
comunidad de usuarios que han optado por esta tecnología, lo que facilita el
uso de gran variedad de sensores, actuadores, conectividad con diferentes
programas, entre otras.
Existen varios tipos de placas, de las cuales debido al número de
entradas y salidas necesarias para el uso del prototipo se ha seleccionado
la placa Arduino Uno, cuyas especificaciones se pueden observar en la
Tabla 25.
Tabla 25 Especificaciones Arduino Uno R3.
Característica Valor o capacidad
Microcontrolador ATmega328
Voltaje del sistema 5V
Voltaje de entrada (recomendado) 7-12V
Voltaje de entrada(limites) 6-20V
Pines de entrada y salida digitales 14 (6 proveen salidas de PWM)
Entradas analógicas 6
Corriente DC por pin de entrada y salida
40mA
Corriente DC para pines de 3.3V 50mA
Memoria FLASH 32 KB de los cuales 0.5 KB son
usados por el bootloader
SRAM 2KB
EEPROM 1KB
Velocidad de reloj 16MHz
Fuente: (Arduino, 2013)
91
La tarjeta Arduino Uno R3 puede ser alimentada desde la conexión USB
o a través de una fuente externa, por esta razón, se opta por utilizar como
alimentación el puerto USB de la computadora para evitar el diseño de una
fuente externa.
Figura 47 Tarjeta Arduino Uno R3
Fuente: (Arduino, 2013)
3.5.2.2.1 Distribución de pines para la aplicación
La tarjeta Arduino Uno R3 tiene 14 pines destinados como entradas o
salidas digitales, además cuenta con 6 entradas o salidas análogas, de esta
forma para el presente proyecto se ha asignado los pines de la forma
expuesta en la Tabla 26.
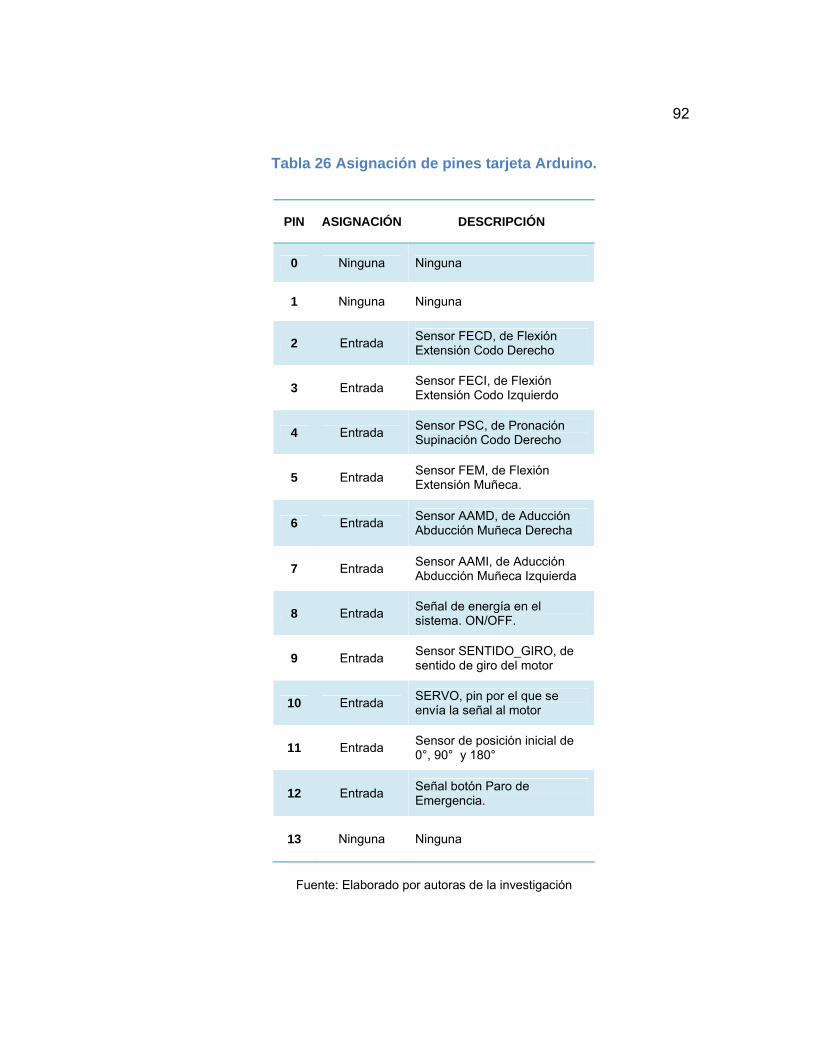
92
Tabla 26 Asignación de pines tarjeta Arduino.
PIN ASIGNACIÓN DESCRIPCIÓN
0 Ninguna Ninguna
1 Ninguna Ninguna
2 Entrada Sensor FECD, de Flexión Extensión Codo Derecho
3 Entrada Sensor FECI, de Flexión Extensión Codo Izquierdo
4 Entrada Sensor PSC, de Pronación Supinación Codo Derecho
5 Entrada Sensor FEM, de Flexión Extensión Muñeca.
6 Entrada Sensor AAMD, de Aducción Abducción Muñeca Derecha
7 Entrada Sensor AAMI, de Aducción Abducción Muñeca Izquierda
8 Entrada Señal de energía en el sistema. ON/OFF.
9 Entrada Sensor SENTIDO_GIRO, de sentido de giro del motor
10 Entrada SERVO, pin por el que se envía la señal al motor
11 Entrada Sensor de posición inicial de 0°, 90° y 180°
12 Entrada Señal botón Paro de Emergencia.
13 Ninguna Ninguna
Fuente: Elaborado por autoras de la investigación
93
3.6 Programación
3.6.1 Herramientas de desarrollo
3.6.1.1 Matlab
Es un programa que permite el cálculo matemático, visualización y
programación. Además, también permite el análisis de datos, desarrollo de
algoritmos y aplicaciones.
3.6.1.2 Arduino
Es un entorno de código abierto de fácil programación. Es utilizable en
distintos sistemas operativos como Windows, Mac OS X y Linux.
3.6.2 Diseño del Software del Sistema Electrónico
El software del sistema electrónico debe cumplir con ciertos requisitos
del sistema para llevar a cabo el proceso de rehabilitación con éxito, de
manera que se tenga en cuenta parámetros en el diseño del software. Sin
embargo, es preciso un flujograma que muestre el proceso general que
realiza el software.
3.6.2.1 Flujograma general del Software del Sistema Electrónico
El software del sistema electrónico es una interfaz que debe cumplir con
una serie de procesos que se muestran en el flujograma general del
software del sistema electrónico.
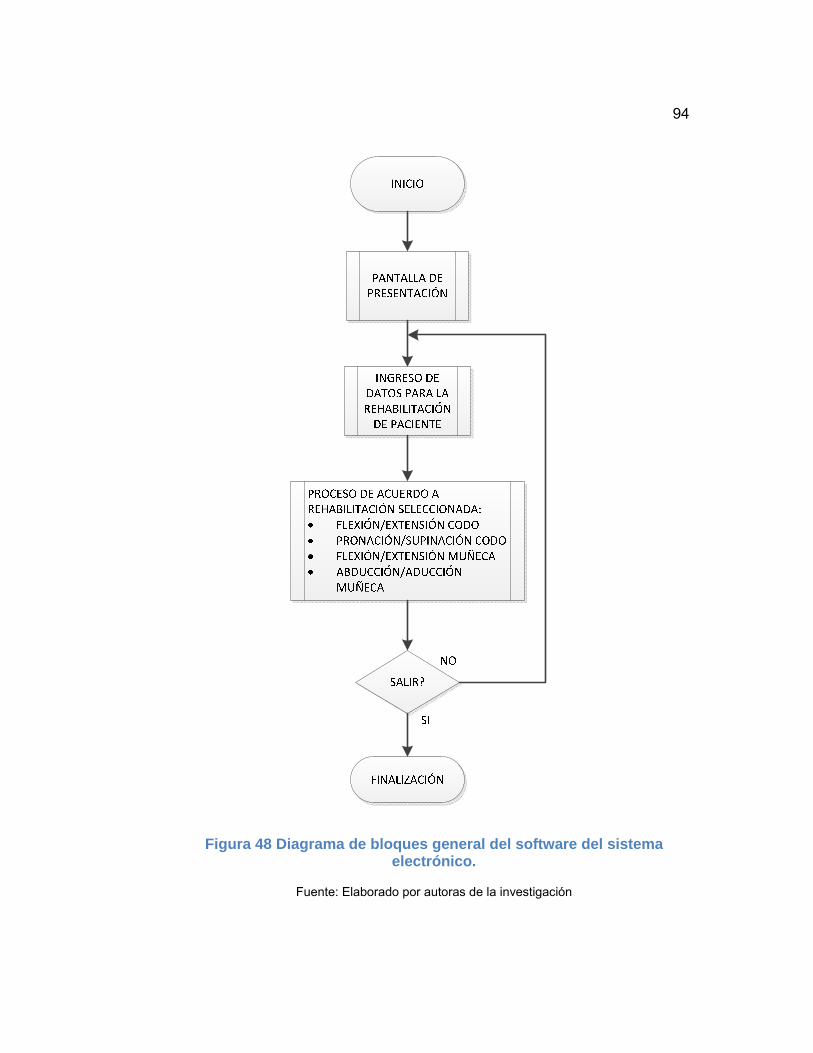
94
Figura 48 Diagrama de bloques general del software del sistema electrónico.
Fuente: Elaborado por autoras de la investigación
95
3.6.2.1.1 Pantalla de presentación
El software muestra una pantalla de presentación al usuario donde se
debe indicar una imagen del prototipo físico y las personas desarrolladoras
del mismo.
3.6.2.1.2 Ingreso de datos para la rehabilitación del paciente
El ingreso de datos para la rehabilitación del paciente es el paso que
será la base para la posterior ejecución del procedimiento, por lo que el
usuario deberá encontrar pantallas de selección y de ingreso de datos
acorde a la rehabilitación necesitada por el paciente en específico.
3.6.2.1.3 Proceso de acuerdo a rehabilitación seleccionada
Una vez seleccionados e ingresados los datos por parte del usuario, este
será capaz de ejecutar la rehabilitación al paciente a través del software
diseñado, en este proceso se deben tomar en cuenta ciertos requisitos para
llevar a cabo apropiadamente la rehabilitación seleccionada de cualquiera
de los movimientos propuestos, flexión/extensión, pronación/supinación del
codo, flexión/extensión y abducción/aducción de la muñeca.
3.6.2.1.4 Salir
El usuario puede salir del software en cualquier momento si lo desea, en
caso contrario y una vez terminado el proceso de rehabilitación, el usuario
tiene la posibilidad de ingresar un nuevo proceso y continuar la
rehabilitación al mismo, o a un paciente diferente.
96
3.6.2.2 Requisitos del software del sistema electrónico
El software del sistema electrónico debe cumplir con requisitos que le
permitan ejecutar, calibrar el sistema y también la comunicación con tarjeta
Arduino para llevar a cabo lo ingresado por el usuario, es decir:
Establecimiento de comunicación con tarjeta Arduino
Calibración del prototipo
Proceso de rehabilitación de acuerdo a lo ingresado por el
usuario
3.6.2.2.1 Establecimiento de comunicación con tarjeta Arduino
Para lograr la comunicación con la tarjeta Arduino se debe establecer la
transferencia de información entre Matlab y Arduino, por lo que mediante un
paquete provisto por los creadores de ambos programas es posible incluir
archivos en la librería de Arduino y archivos en la carpeta de Matlab del
computador.
De esta forma, es posible que Arduino realice la ejecución de comandos
desde Matlab, interacción entre dispositivos, transferencia de datos desde
Arduino hacia Matlab y viceversa. En Matlab se deben configurar los pines
de la tarjeta Arduino.
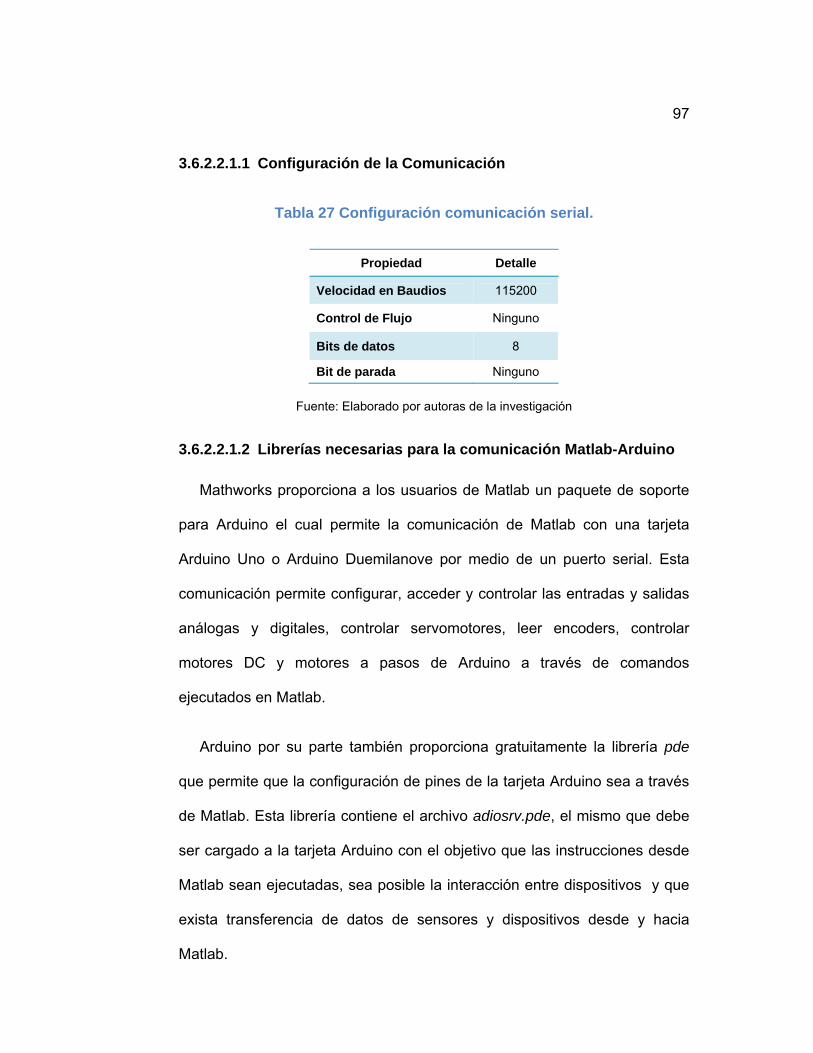
97
3.6.2.2.1.1 Configuración de la Comunicación
Tabla 27 Configuración comunicación serial.
Propiedad Detalle
Velocidad en Baudios 115200
Control de Flujo Ninguno
Bits de datos 8
Bit de parada Ninguno
Fuente: Elaborado por autoras de la investigación
3.6.2.2.1.2 Librerías necesarias para la comunicación Matlab-Arduino
Mathworks proporciona a los usuarios de Matlab un paquete de soporte
para Arduino el cual permite la comunicación de Matlab con una tarjeta
Arduino Uno o Arduino Duemilanove por medio de un puerto serial. Esta
comunicación permite configurar, acceder y controlar las entradas y salidas
análogas y digitales, controlar servomotores, leer encoders, controlar
motores DC y motores a pasos de Arduino a través de comandos
ejecutados en Matlab.
Arduino por su parte también proporciona gratuitamente la librería pde
que permite que la configuración de pines de la tarjeta Arduino sea a través
de Matlab. Esta librería contiene el archivo adiosrv.pde, el mismo que debe
ser cargado a la tarjeta Arduino con el objetivo que las instrucciones desde
Matlab sean ejecutadas, sea posible la interacción entre dispositivos y que
exista transferencia de datos de sensores y dispositivos desde y hacia
Matlab.
98
3.6.2.2.1.3 Pasos para realizar la comunicación entre Matlab-Arduino
a. Cargar las librerías de soporte de Matlab a la carpeta de librerías de
Matlab.
b. Cargar la librería pde en Arduino y cargar a la tarjeta el archivo
adiosrv.pde.
c. Comprobar el puerto serial habilitado en el ordenador para realizar la
comunicación.
d. Configurar en Matlab el puerto serial, los pines de la tarjeta
definiéndolos como entradas o salidas de acuerdo a la aplicación
correspondiente.
e. Las instrucciones del programa en Matlab deben ser cuidadosamente
escritas para la comunicación entre Matlab-Arduino.
3.6.2.2.2 Calibración del prototipo
El usuario debe tener acceso en todo momento al área de mantenimiento
donde se puede realizar la calibración del prototipo mediante la lectura de
estado de sensores y giro del motor a un ángulo específico.
3.6.2.2.3 Proceso de rehabilitación de acuerdo a lo ingresado por el
usuario.
El proceso de rehabilitación se realiza en base a la información
ingresada previamente por el usuario a través del software. Sin embargo,
para la ejecución de este proceso la tarjeta Arduino interviene directamente,
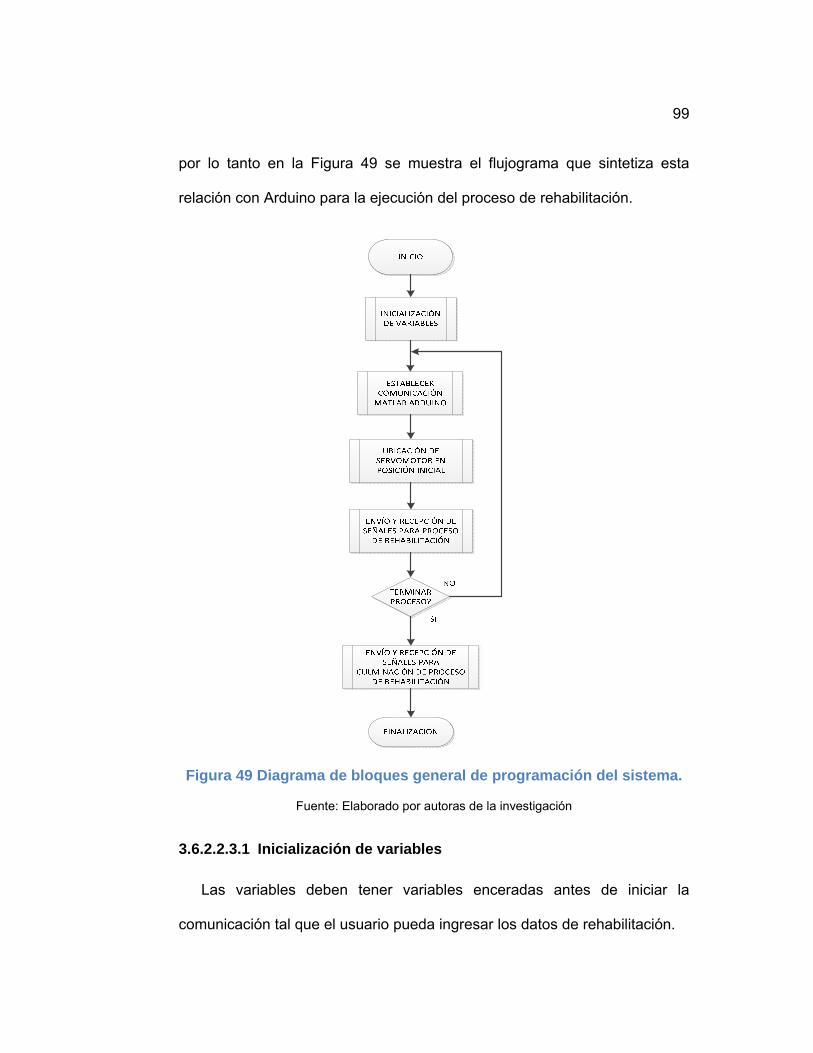
99
por lo tanto en la Figura 49 se muestra el flujograma que sintetiza esta
relación con Arduino para la ejecución del proceso de rehabilitación.
Figura 49 Diagrama de bloques general de programación del sistema.
Fuente: Elaborado por autoras de la investigación
3.6.2.2.3.1 Inicialización de variables
Las variables deben tener variables enceradas antes de iniciar la
comunicación tal que el usuario pueda ingresar los datos de rehabilitación.
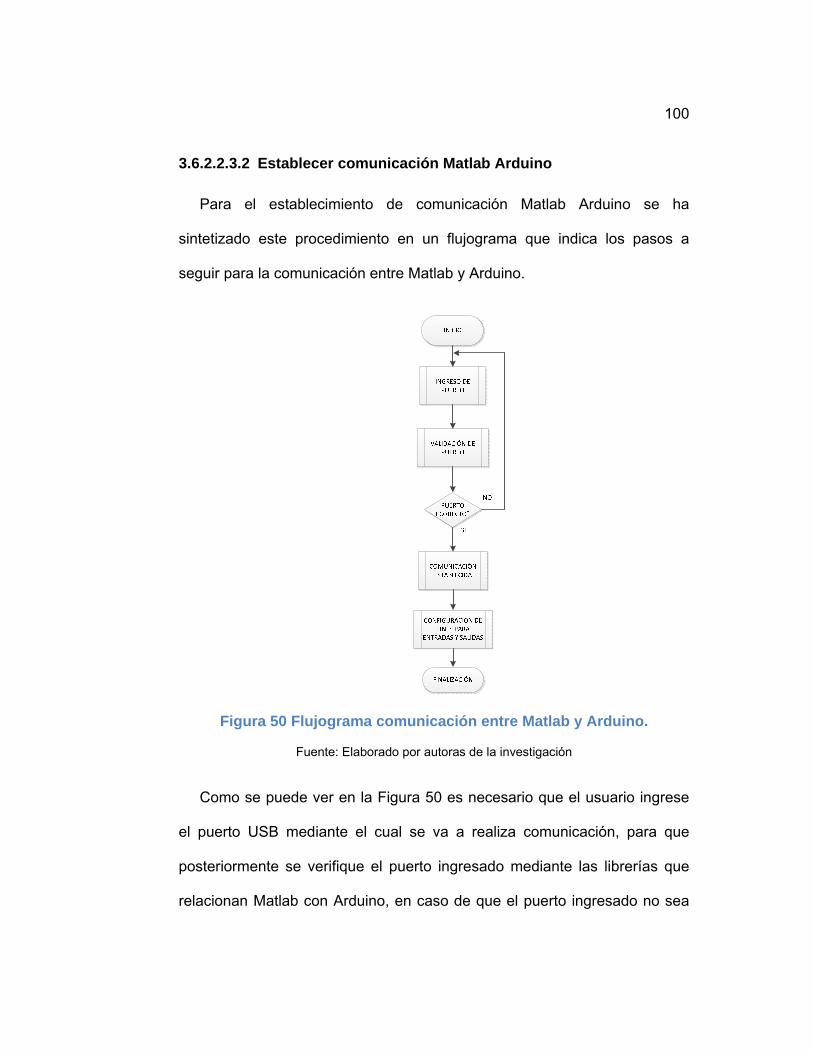
100
3.6.2.2.3.2 Establecer comunicación Matlab Arduino
Para el establecimiento de comunicación Matlab Arduino se ha
sintetizado este procedimiento en un flujograma que indica los pasos a
seguir para la comunicación entre Matlab y Arduino.
Figura 50 Flujograma comunicación entre Matlab y Arduino.
Fuente: Elaborado por autoras de la investigación
Como se puede ver en la Figura 50 es necesario que el usuario ingrese
el puerto USB mediante el cual se va a realiza comunicación, para que
posteriormente se verifique el puerto ingresado mediante las librerías que
relacionan Matlab con Arduino, en caso de que el puerto ingresado no sea
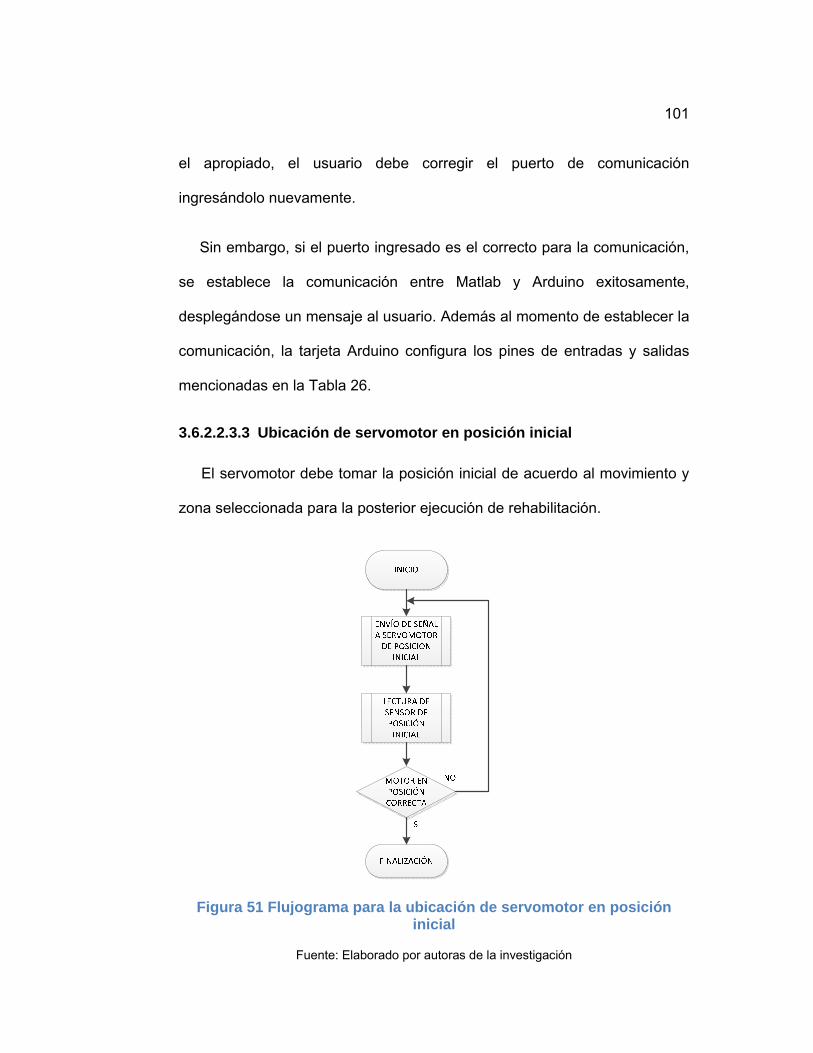
101
el apropiado, el usuario debe corregir el puerto de comunicación
ingresándolo nuevamente.
Sin embargo, si el puerto ingresado es el correcto para la comunicación,
se establece la comunicación entre Matlab y Arduino exitosamente,
desplegándose un mensaje al usuario. Además al momento de establecer la
comunicación, la tarjeta Arduino configura los pines de entradas y salidas
mencionadas en la Tabla 26.
3.6.2.2.3.3 Ubicación de servomotor en posición inicial
El servomotor debe tomar la posición inicial de acuerdo al movimiento y
zona seleccionada para la posterior ejecución de rehabilitación.
Figura 51 Flujograma para la ubicación de servomotor en posición inicial
Fuente: Elaborado por autoras de la investigación
102
El motor ha sido colocado de tal manera que pueda cumplir con todos los
movimientos planteados, por lo que la posición inicial en grados del
servomotor para cada movimiento se expone en la Tabla 28.
Tabla 28 Posición inicial del motor
POSICION INICIAL DEL MOTOR (°)
ZONA MOVIMIENTO BRAZO
IZQUIERDO DERECHO
Codo Flexión/Extensión 180° 0°
Pronación/Supinación 90° 90°
Muñeca Flexión/Extensión 180° 180°
Abducción/Aducción 180° 180°
Fuente: Elaborado por autoras de la investigación
Como se observa en el flujograma de ubicación del servomotor en
posición inicial, una vez enviada la señal al servomotor para que este
alcance su posición dependiendo del movimiento y brazo seleccionado, el
sensor envía una señal de confirmación de posición correcta del
servomotor. Si la posición no es la correcta, se envía nuevamente la señal
al servomotor, para que este pueda alcanzar la posición correcta.
3.6.2.2.3.4 Envío y recepción de señales para proceso de rehabilitación
Dentro del envío y recepción de señales se debe tomar en cuenta que es
necesario la lectura de estado de los sensores que intervienen en el
movimiento de rehabilitación seleccionado, además del envío de señal al
servomotor para que este alcance el rango angular ingresado por el usuario.
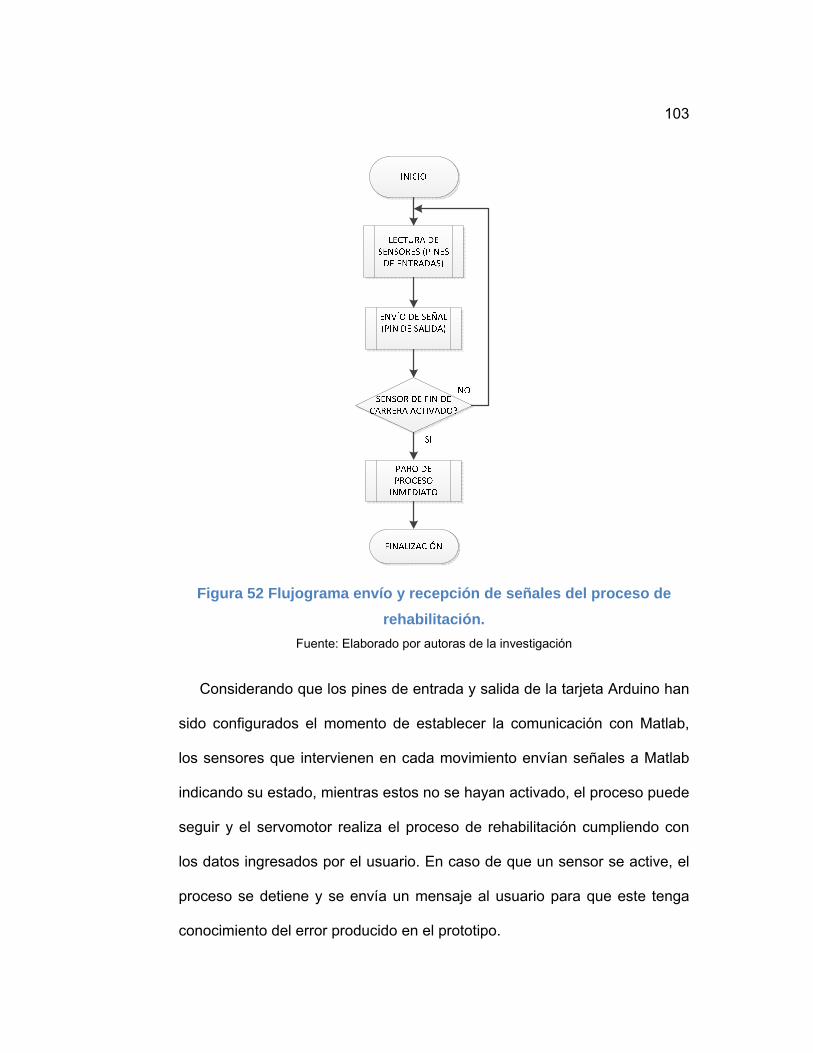
103
Figura 52 Flujograma envío y recepción de señales del proceso de
rehabilitación.
Fuente: Elaborado por autoras de la investigación
Considerando que los pines de entrada y salida de la tarjeta Arduino han
sido configurados el momento de establecer la comunicación con Matlab,
los sensores que intervienen en cada movimiento envían señales a Matlab
indicando su estado, mientras estos no se hayan activado, el proceso puede
seguir y el servomotor realiza el proceso de rehabilitación cumpliendo con
los datos ingresados por el usuario. En caso de que un sensor se active, el
proceso se detiene y se envía un mensaje al usuario para que este tenga
conocimiento del error producido en el prototipo.
104
3.6.2.2.3.5 Culminación de proceso
Al terminar el proceso de rehabilitación, el usuario tiene la opción de
terminar el proceso, es decir, salir del sistema o de continuar en el. Si
escoge continuar dentro de la interfaz, el usuario puede ingresar un nuevo
procedimiento de rehabilitación.
3.6.2.2.3.6 Envío y recepción de señales para culminación de proceso
de rehabilitación
Habiendo seleccionado salir del sistema al haber culminado el proceso
de rehabilitación, se envía la señal al servomotor para que este tome la
posición final y se elimine la comunicación entre Matlab Arduino para
finalmente salir del software.
3.6.3 Diseño del software del prototipo
El diseño del software del prototipo toma en cuenta todo lo mencionado
anteriormente, siguiendo las explicaciones anteriores, se basará en
flujogramas para explicar y sintetizar los procesos que se ejecutan en el
software del prototipo de rehabilitación.
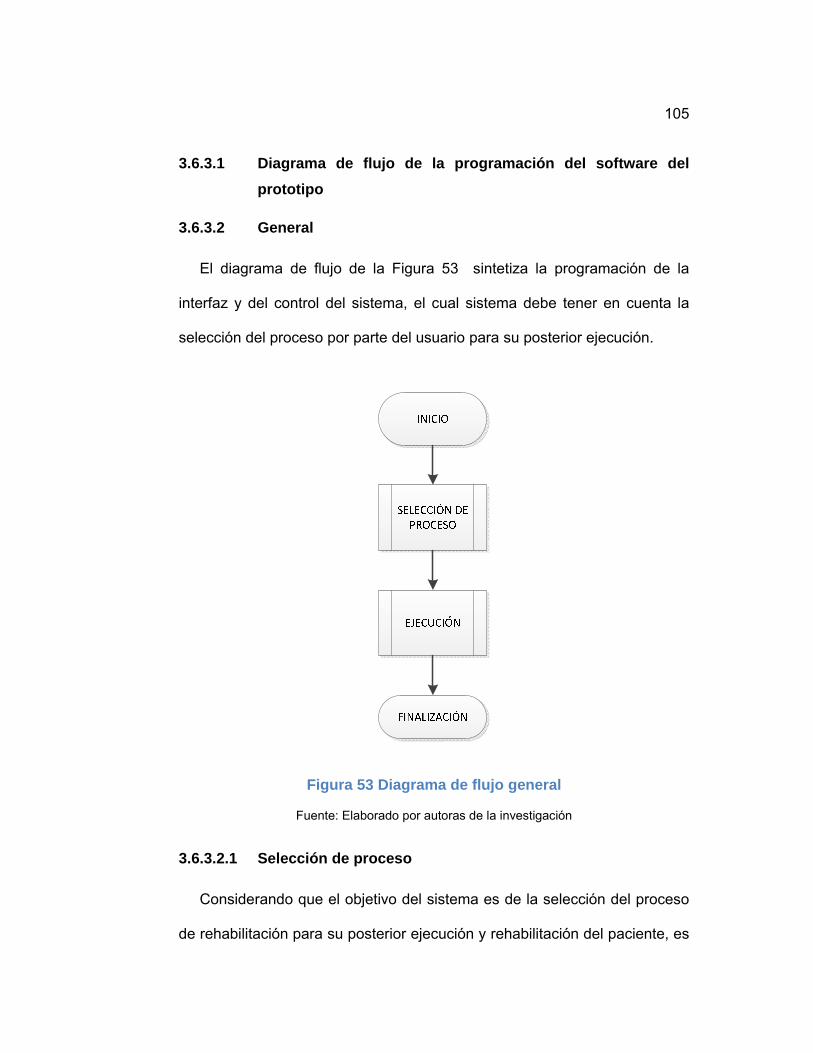
105
3.6.3.1 Diagrama de flujo de la programación del software del
prototipo
3.6.3.2 General
El diagrama de flujo de la Figura 53 sintetiza la programación de la
interfaz y del control del sistema, el cual sistema debe tener en cuenta la
selección del proceso por parte del usuario para su posterior ejecución.
Figura 53 Diagrama de flujo general
Fuente: Elaborado por autoras de la investigación
3.6.3.2.1 Selección de proceso
Considerando que el objetivo del sistema es de la selección del proceso
de rehabilitación para su posterior ejecución y rehabilitación del paciente, es
106
imperativo que el fisioterapeuta con conocimiento de rehabilitación ingrese
el proceso de rehabilitación personalizado para cada paciente. Además, el
usuario también puede seleccionar el proceso de mantenimiento para
calibración del sistema.
3.6.3.2.2 Ejecución
Se efectúa activamente el proceso de rehabilitación, produciendo el
movimiento del servomotor, a la vez se controla el estado de los sensores
de final de carrera, de posición inicial, de contador de ángulo y de sentido
de giro del motor hasta que se cumpla el número de repeticiones y series
ingresadas por el usuario previamente.
3.6.3.3 Subprocesos
Para describir más claramente la programación se ha dividido en
subprocesos cada parte del programa. Por lo tanto, a continuación se
describirá cada uno de los subprocesos existentes en el sistema a partir del
diagrama de flujo general y se describirá desde un proceso mayor a uno
menor para lograr explicar todo lo concerniente a la programación.
Sin embargo, para un mayor entendimiento del código de programación, es
importante mencionar las variables que intervienen en el software con el fin
de lograr el control del prototipo de rehabilitación.
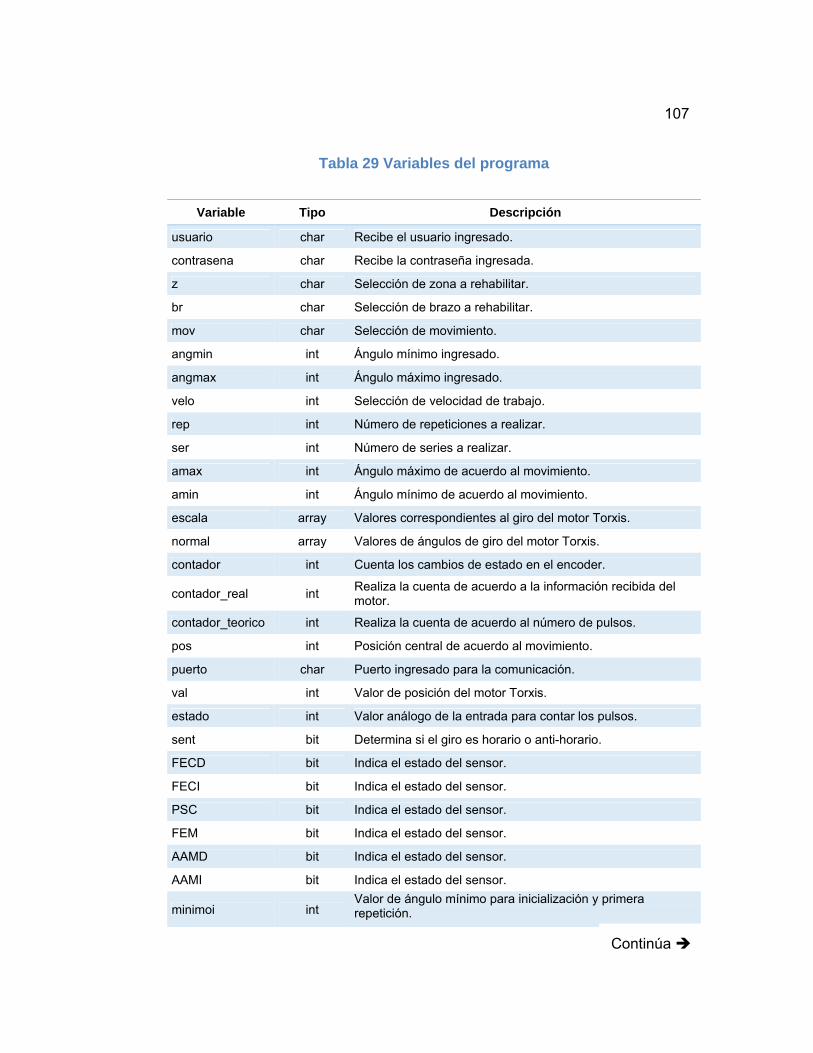
107
Tabla 29 Variables del programa
Variable Tipo Descripción
usuario char Recibe el usuario ingresado.
contrasena char Recibe la contraseña ingresada.
z char Selección de zona a rehabilitar.
br char Selección de brazo a rehabilitar.
mov char Selección de movimiento.
angmin int Ángulo mínimo ingresado.
angmax int Ángulo máximo ingresado.
velo int Selección de velocidad de trabajo.
rep int Número de repeticiones a realizar.
ser int Número de series a realizar.
amax int Ángulo máximo de acuerdo al movimiento.
amin int Ángulo mínimo de acuerdo al movimiento.
escala array Valores correspondientes al giro del motor Torxis.
normal array Valores de ángulos de giro del motor Torxis.
contador int Cuenta los cambios de estado en el encoder.
contador_real int Realiza la cuenta de acuerdo a la información recibida del motor.
contador_teorico int Realiza la cuenta de acuerdo al número de pulsos.
pos int Posición central de acuerdo al movimiento.
puerto char Puerto ingresado para la comunicación.
val int Valor de posición del motor Torxis.
estado int Valor análogo de la entrada para contar los pulsos.
sent bit Determina si el giro es horario o anti-horario.
FECD bit Indica el estado del sensor.
FECI bit Indica el estado del sensor.
PSC bit Indica el estado del sensor.
FEM bit Indica el estado del sensor.
AAMD bit Indica el estado del sensor.
AAMI bit Indica el estado del sensor.
minimoi int Valor de ángulo mínimo para inicialización y primera repetición.
Continúa
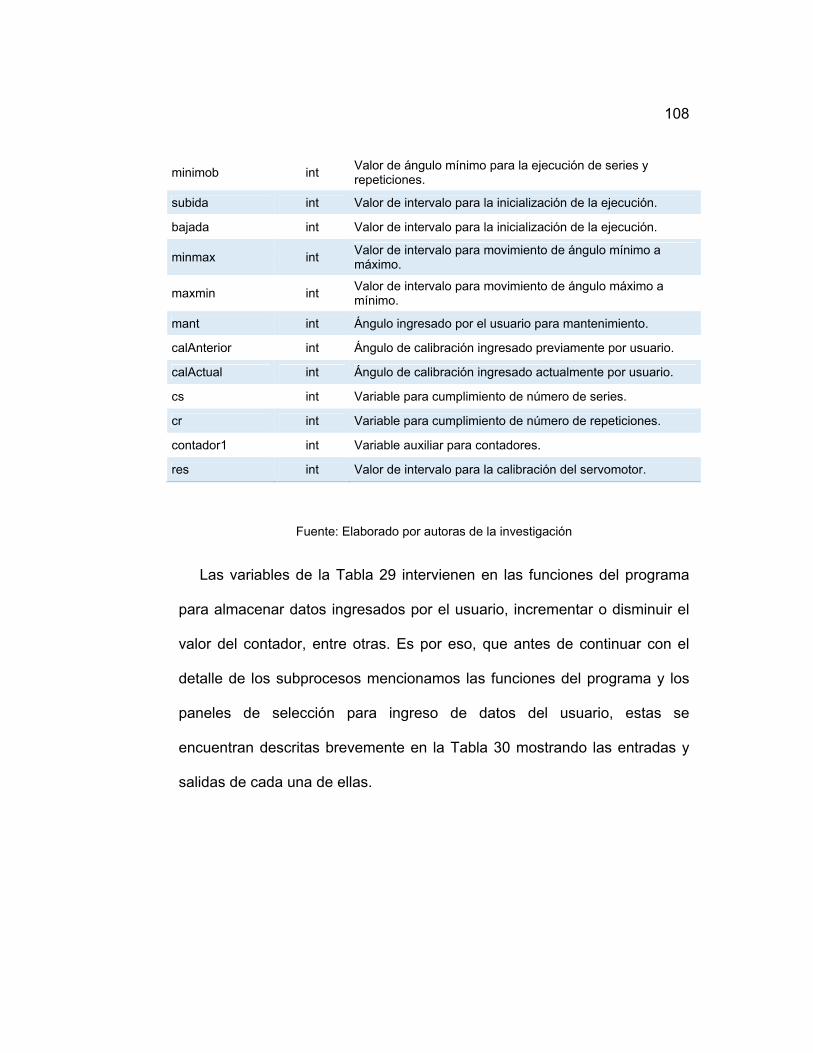
108
minimob int Valor de ángulo mínimo para la ejecución de series y repeticiones.
subida int Valor de intervalo para la inicialización de la ejecución.
bajada int Valor de intervalo para la inicialización de la ejecución.
minmax int Valor de intervalo para movimiento de ángulo mínimo a máximo.
maxmin int Valor de intervalo para movimiento de ángulo máximo a mínimo.
mant int Ángulo ingresado por el usuario para mantenimiento.
calAnterior int Ángulo de calibración ingresado previamente por usuario.
calActual int Ángulo de calibración ingresado actualmente por usuario.
cs int Variable para cumplimiento de número de series.
cr int Variable para cumplimiento de número de repeticiones.
contador1 int Variable auxiliar para contadores.
res int Valor de intervalo para la calibración del servomotor.
Fuente: Elaborado por autoras de la investigación
Las variables de la Tabla 29 intervienen en las funciones del programa
para almacenar datos ingresados por el usuario, incrementar o disminuir el
valor del contador, entre otras. Es por eso, que antes de continuar con el
detalle de los subprocesos mencionamos las funciones del programa y los
paneles de selección para ingreso de datos del usuario, estas se
encuentran descritas brevemente en la Tabla 30 mostrando las entradas y
salidas de cada una de ellas.
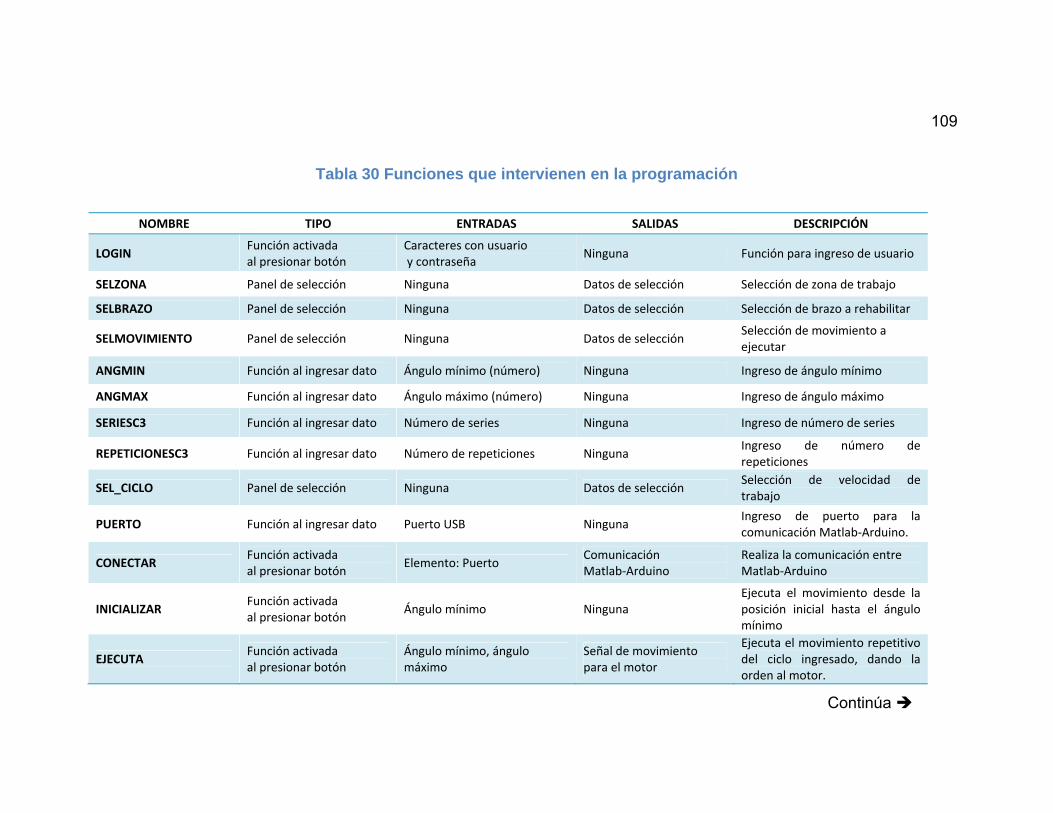
109
Tabla 30 Funciones que intervienen en la programación
NOMBRE TIPO ENTRADAS SALIDAS DESCRIPCIÓN
LOGIN Función activada al presionar botón
Caracteres con usuario y contraseña
Ninguna Función para ingreso de usuario
SELZONA Panel de selección Ninguna Datos de selección Selección de zona de trabajo
SELBRAZO Panel de selección Ninguna Datos de selección Selección de brazo a rehabilitar
SELMOVIMIENTO Panel de selección Ninguna Datos de selección Selección de movimiento a ejecutar
ANGMIN Función al ingresar dato Ángulo mínimo (número) Ninguna Ingreso de ángulo mínimo
ANGMAX Función al ingresar dato Ángulo máximo (número) Ninguna Ingreso de ángulo máximo
SERIESC3 Función al ingresar dato Número de series Ninguna Ingreso de número de series
REPETICIONESC3 Función al ingresar dato Número de repeticiones Ninguna Ingreso de número de repeticiones
SEL_CICLO Panel de selección Ninguna Datos de selección Selección de velocidad de trabajo
PUERTO Función al ingresar dato Puerto USB Ninguna Ingreso de puerto para la comunicación Matlab‐Arduino.
CONECTAR Función activada al presionar botón
Elemento: Puerto Comunicación Matlab‐Arduino
Realiza la comunicación entre Matlab‐Arduino
INICIALIZAR Función activada al presionar botón
Ángulo mínimo Ninguna Ejecuta el movimiento desde la posición inicial hasta el ángulo mínimo
EJECUTA Función activada al presionar botón
Ángulo mínimo, ángulo máximo
Señal de movimiento para el motor
Ejecuta el movimiento repetitivo del ciclo ingresado, dando la orden al motor.
Continúa
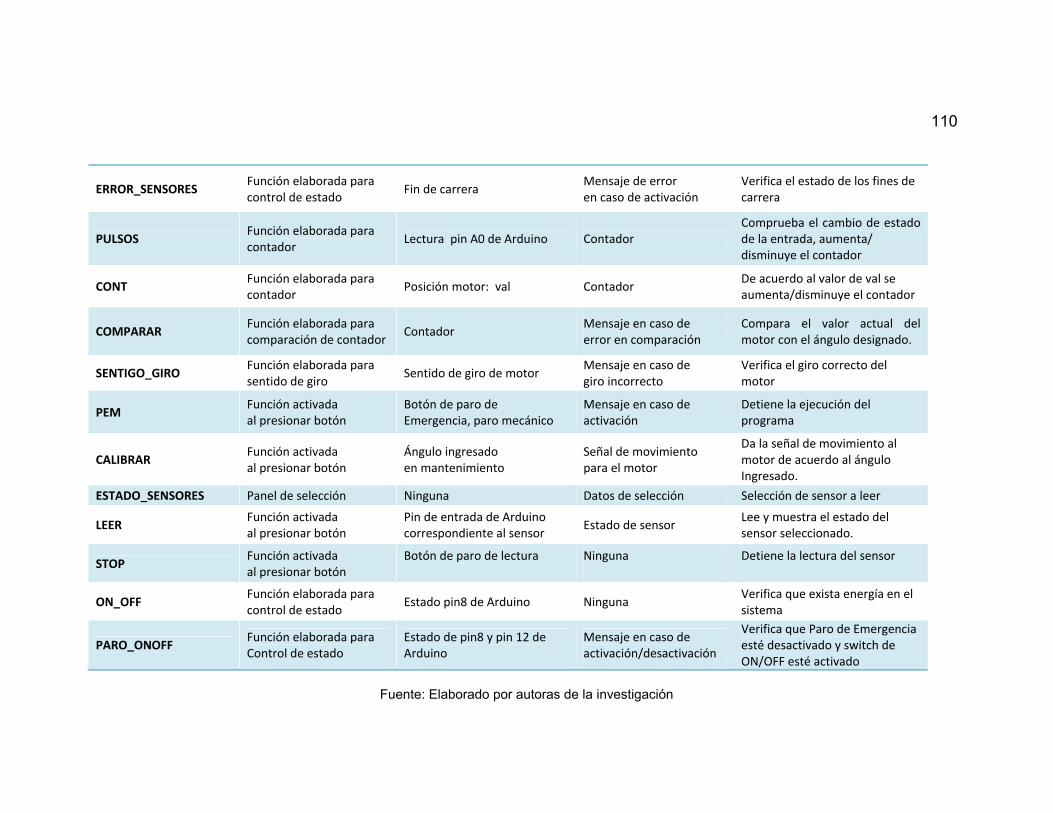
110
ERROR_SENSORES Función elaborada para control de estado
Fin de carrera Mensaje de error en caso de activación
Verifica el estado de los fines de carrera
PULSOS Función elaborada para contador
Lectura pin A0 de Arduino Contador Comprueba el cambio de estado de la entrada, aumenta/ disminuye el contador
CONT Función elaborada para contador
Posición motor: val Contador De acuerdo al valor de val se aumenta/disminuye el contador
COMPARAR Función elaborada para comparación de contador
Contador Mensaje en caso de error en comparación
Compara el valor actual del motor con el ángulo designado.
SENTIGO_GIRO Función elaborada para sentido de giro
Sentido de giro de motor Mensaje en caso de giro incorrecto
Verifica el giro correcto del motor
PEM Función activada al presionar botón
Botón de paro de Emergencia, paro mecánico
Mensaje en caso de activación
Detiene la ejecución del programa
CALIBRAR Función activada al presionar botón
Ángulo ingresado en mantenimiento
Señal de movimiento para el motor
Da la señal de movimiento al motor de acuerdo al ángulo Ingresado.
ESTADO_SENSORES Panel de selección Ninguna Datos de selección Selección de sensor a leer
LEER Función activada al presionar botón
Pin de entrada de Arduino correspondiente al sensor
Estado de sensor Lee y muestra el estado del sensor seleccionado.
STOP Función activada al presionar botón
Botón de paro de lectura
Ninguna
Detiene la lectura del sensor
ON_OFF Función elaborada para control de estado
Estado pin8 de Arduino Ninguna Verifica que exista energía en el sistema
PARO_ONOFF Función elaborada para Control de estado
Estado de pin8 y pin 12 de Arduino
Mensaje en caso de activación/desactivación
Verifica que Paro de Emergencia esté desactivado y switch de ON/OFF esté activado
Fuente: Elaborado por autoras de la investigación
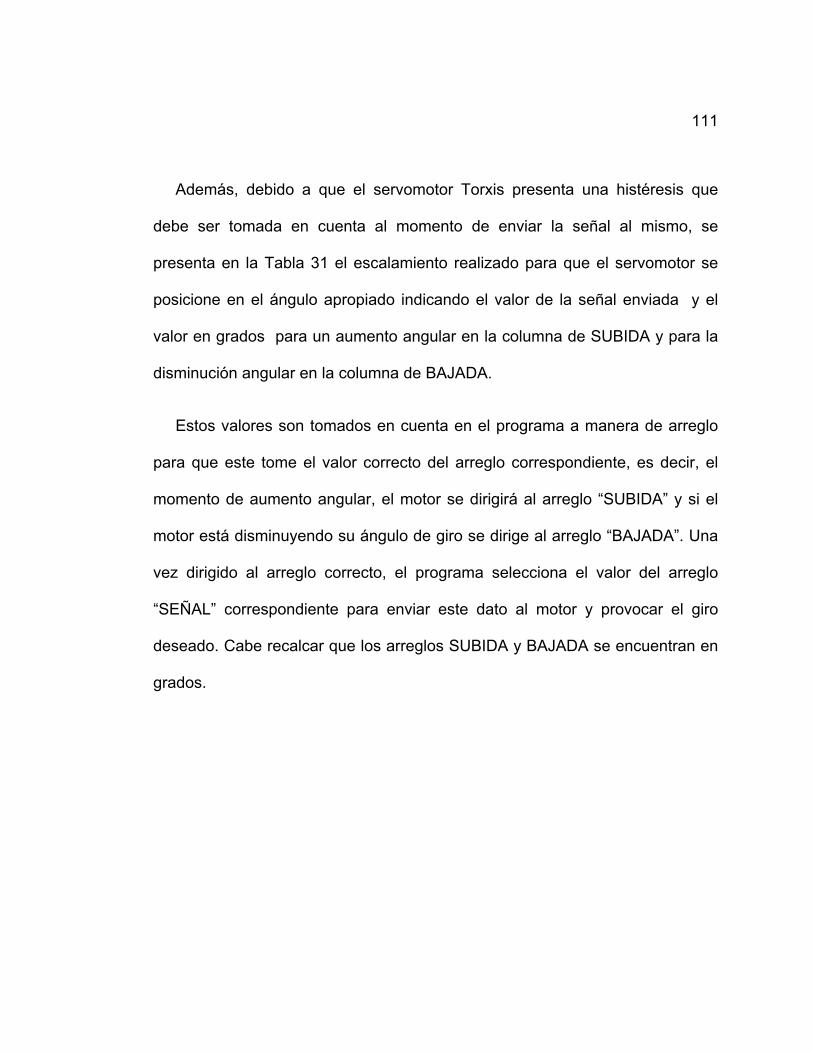
111
Además, debido a que el servomotor Torxis presenta una histéresis que
debe ser tomada en cuenta al momento de enviar la señal al mismo, se
presenta en la Tabla 31 el escalamiento realizado para que el servomotor se
posicione en el ángulo apropiado indicando el valor de la señal enviada y el
valor en grados para un aumento angular en la columna de SUBIDA y para la
disminución angular en la columna de BAJADA.
Estos valores son tomados en cuenta en el programa a manera de arreglo
para que este tome el valor correcto del arreglo correspondiente, es decir, el
momento de aumento angular, el motor se dirigirá al arreglo “SUBIDA” y si el
motor está disminuyendo su ángulo de giro se dirige al arreglo “BAJADA”. Una
vez dirigido al arreglo correcto, el programa selecciona el valor del arreglo
“SEÑAL” correspondiente para enviar este dato al motor y provocar el giro
deseado. Cabe recalcar que los arreglos SUBIDA y BAJADA se encuentran en
grados.
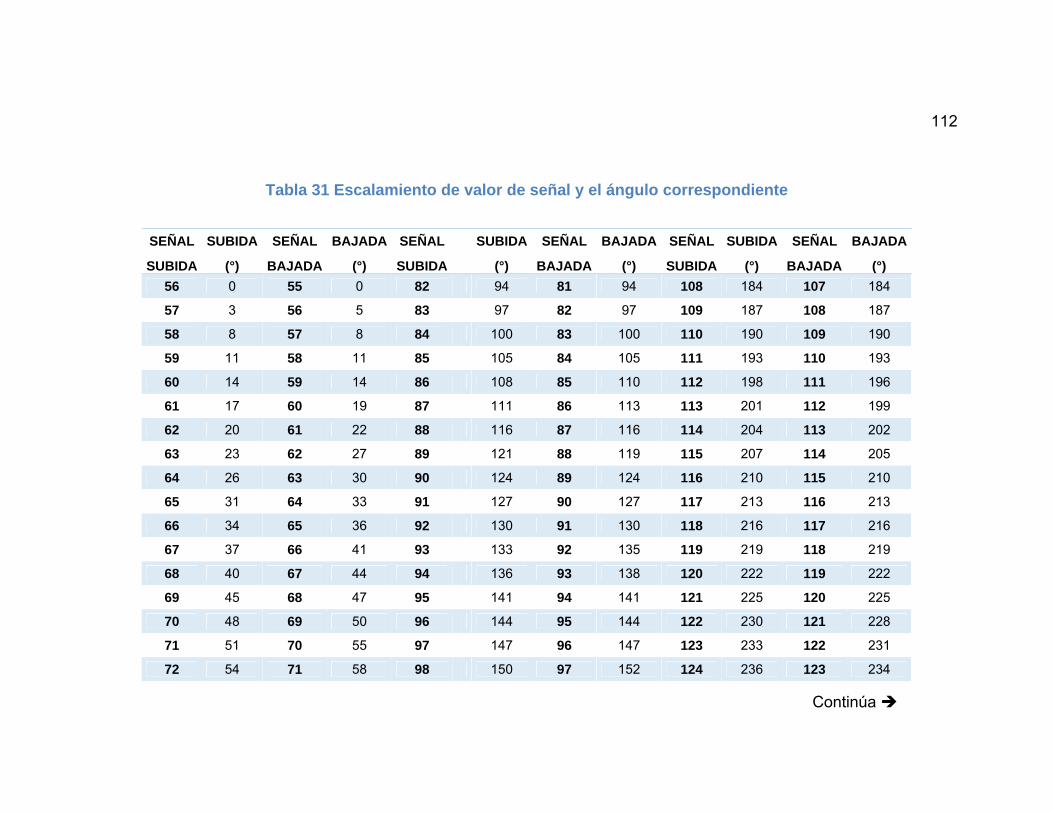
112
Tabla 31 Escalamiento de valor de señal y el ángulo correspondiente
SEÑAL SUBIDA SEÑAL BAJADA SEÑAL SUBIDA SEÑAL BAJADA SEÑAL SUBIDA SEÑAL BAJADA
SUBIDA (°) BAJADA (°) SUBIDA (°) BAJADA (°) SUBIDA (°) BAJADA (°)
56 0 55 0 82 94 81 94 108 184 107 184
57 3 56 5 83 97 82 97 109 187 108 187
58 8 57 8 84 100 83 100 110 190 109 190
59 11 58 11 85 105 84 105 111 193 110 193
60 14 59 14 86 108 85 110 112 198 111 196
61 17 60 19 87 111 86 113 113 201 112 199
62 20 61 22 88 116 87 116 114 204 113 202
63 23 62 27 89 121 88 119 115 207 114 205
64 26 63 30 90 124 89 124 116 210 115 210
65 31 64 33 91 127 90 127 117 213 116 213
66 34 65 36 92 130 91 130 118 216 117 216
67 37 66 41 93 133 92 135 119 219 118 219
68 40 67 44 94 136 93 138 120 222 119 222
69 45 68 47 95 141 94 141 121 225 120 225
70 48 69 50 96 144 95 144 122 230 121 228
71 51 70 55 97 147 96 147 123 233 122 231
72 54 71 58 98 150 97 152 124 236 123 234
Continúa
113
73 59 72 61 99 153 98 155 125 239 124 237
74 62 73 64 100 158 99 158 126 242 125 240
75 65 74 69 101 161 100 161 127 245 126 245
76 70 75 72 102 164 101 164 128 248 127 248
77 75 76 75 103 167 102 169 129 251 128 253
78 80 77 80 104 172 103 172 130 254 129 256
79 83 78 83 105 175 104 175 131 257 130 257
80 86 79 86 106 178 105 178
81 89 80 89 107 181 106 181
Fuente: Elaborado por autoras de la investigación
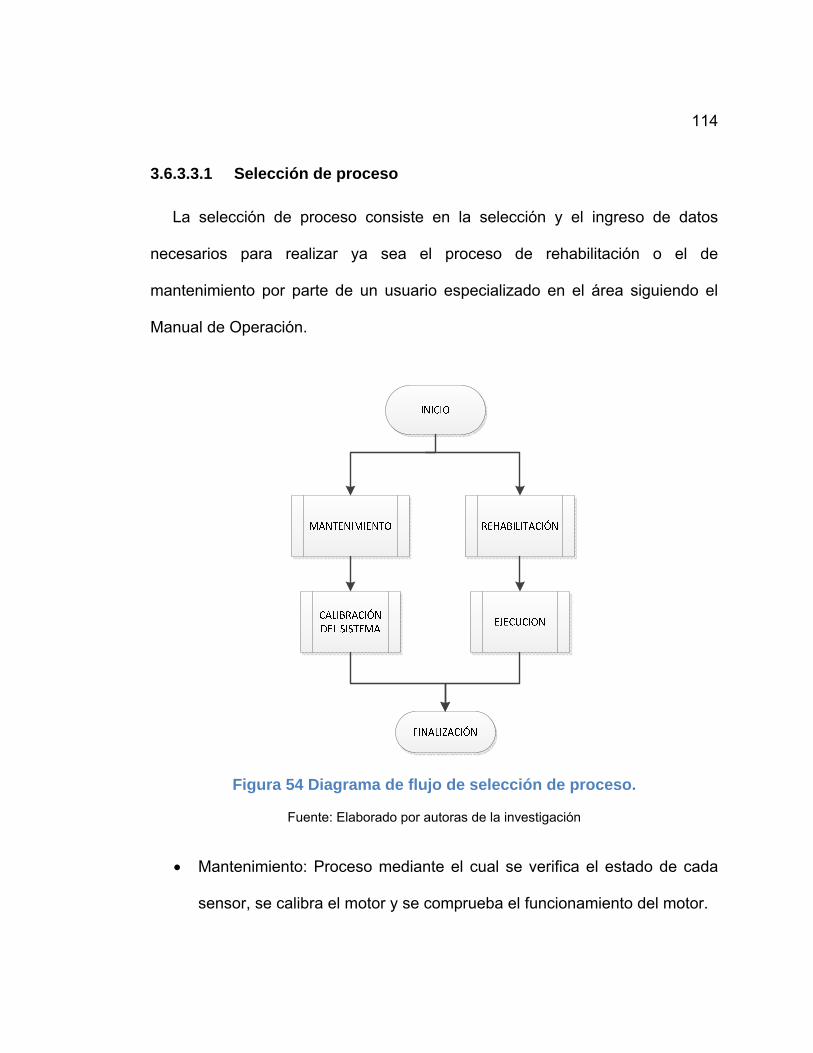
114
3.6.3.3.1 Selección de proceso
La selección de proceso consiste en la selección y el ingreso de datos
necesarios para realizar ya sea el proceso de rehabilitación o el de
mantenimiento por parte de un usuario especializado en el área siguiendo el
Manual de Operación.
Figura 54 Diagrama de flujo de selección de proceso.
Fuente: Elaborado por autoras de la investigación
Mantenimiento: Proceso mediante el cual se verifica el estado de cada
sensor, se calibra el motor y se comprueba el funcionamiento del motor.
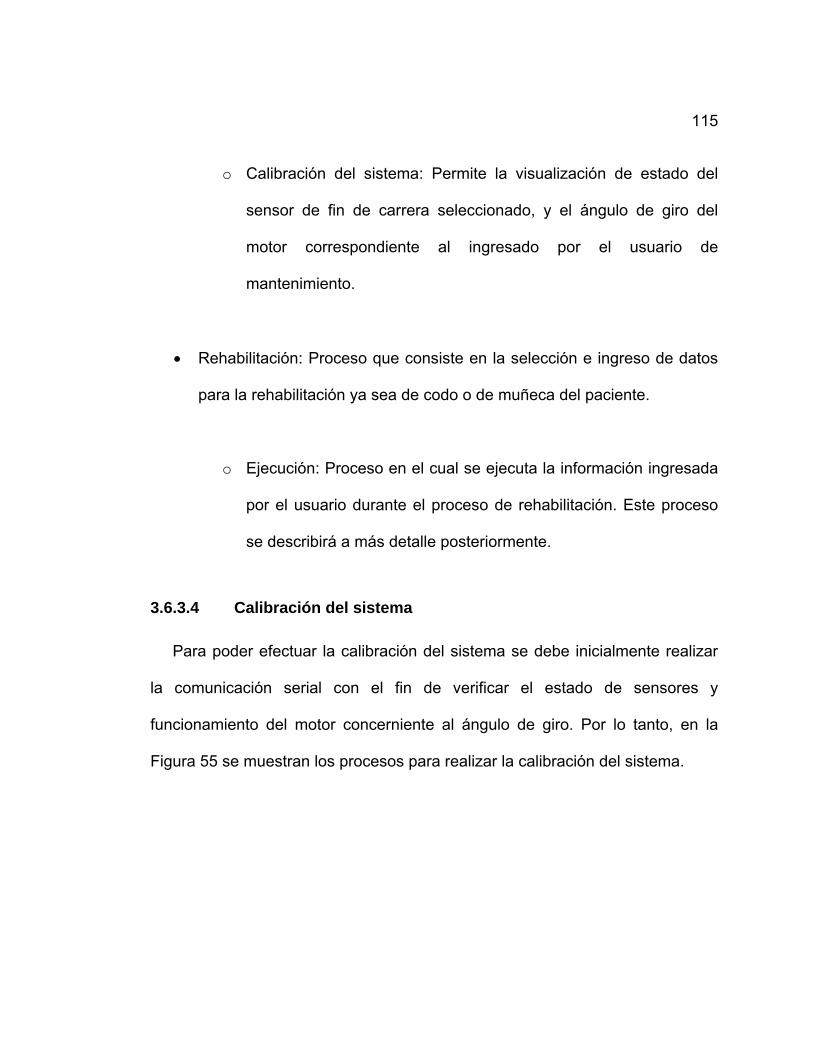
115
o Calibración del sistema: Permite la visualización de estado del
sensor de fin de carrera seleccionado, y el ángulo de giro del
motor correspondiente al ingresado por el usuario de
mantenimiento.
Rehabilitación: Proceso que consiste en la selección e ingreso de datos
para la rehabilitación ya sea de codo o de muñeca del paciente.
o Ejecución: Proceso en el cual se ejecuta la información ingresada
por el usuario durante el proceso de rehabilitación. Este proceso
se describirá a más detalle posteriormente.
3.6.3.4 Calibración del sistema
Para poder efectuar la calibración del sistema se debe inicialmente realizar
la comunicación serial con el fin de verificar el estado de sensores y
funcionamiento del motor concerniente al ángulo de giro. Por lo tanto, en la
Figura 55 se muestran los procesos para realizar la calibración del sistema.
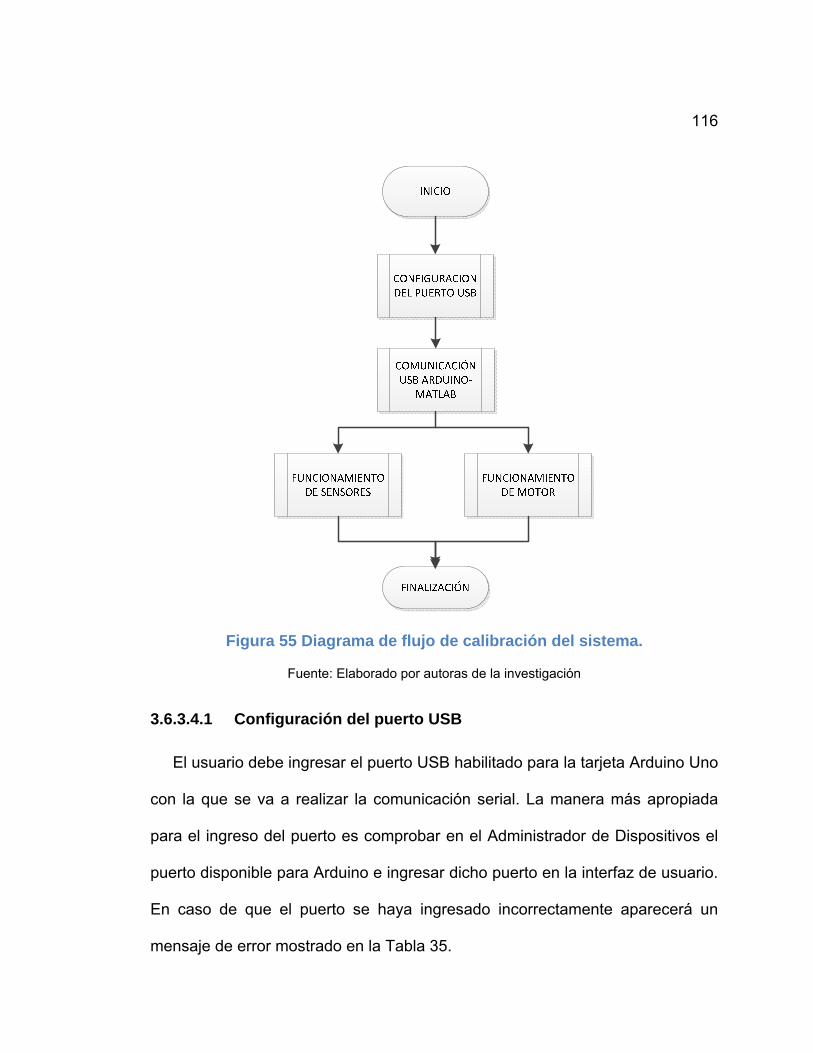
116
Figura 55 Diagrama de flujo de calibración del sistema.
Fuente: Elaborado por autoras de la investigación
3.6.3.4.1 Configuración del puerto USB
El usuario debe ingresar el puerto USB habilitado para la tarjeta Arduino Uno
con la que se va a realizar la comunicación serial. La manera más apropiada
para el ingreso del puerto es comprobar en el Administrador de Dispositivos el
puerto disponible para Arduino e ingresar dicho puerto en la interfaz de usuario.
En caso de que el puerto se haya ingresado incorrectamente aparecerá un
mensaje de error mostrado en la Tabla 35.
117
3.6.3.4.2 Comunicación USB entre Matlab- Arduino
Una vez ingresado el puerto se realiza la comunicación entre ambos
programas por medio de las librerías que permiten esta conexión, tanto de
Matlab, como de Arduino. El comando que define el objeto de la comunicación
entre estos es de la siguiente manera:
a=arduino (‘puerto’)
Al momento de realizarse la comunicación Matlab-Arduino, se despliega un
mensaje de confirmación de comunicación exitosa. En caso contrario, se
muestra un mensaje de error para corregir el puerto.
3.6.3.4.3 Funcionamiento de sensores
El usuario de mantenimiento será capaz de seleccionar el estado del sensor
a analizar. Al analizar los sensores, las funciones de Leer y Pausa son
ejecutables con el fin de controlar el estado del sensor en cualquier momento.
La función de Pausa permite que el usuario pueda realizar cualquier ajuste
mecánico o electrónico al prototipo.
3.6.3.4.4 Funcionamiento del motor
La comprobación de funcionamiento de motor consiste en enviar al motor a
un ángulo dispuesto por el usuario de mantenimiento con el objetivo de
comprobar que el motor llegue al ángulo ingresado.
118
3.6.3.4.5 Código para la calibración del motor
%Comprobación de sistema energizado y verificación de estado de %Paro de Emergencia. PARO_ONOFF(); %Si la posición del motor es en 0° (debe aumentar su ángulo %hasta llegar al ángulo ingresado para calibración) if servo<=56 b=abs(escalaS-mant); d=min(b); e=find(b==d); cal=normalS(e(1)); r=1 calAnterior=55 calActual=cal mant2=mant else res=mant-mant2 %Escalamiento del valor de ángulo ingresado en ángulo %a valor de señal enviada al motor(cal), este escalamiento %es para un giro de un ángulo menor a uno mayor. if res>0 b=abs(escalaS-mant); d=min(b); e=find(b==d); cal=normalS(e(1)); calActual=cal; end %Escalamiento del valor de ángulo ingresado en ángulo %a valor de señal enviada al motor(cal), este escalamiento %es para un giro de un ángulo menor a uno mayor. if res<0 b=abs(escalaB-mant); d=min(b); e=find(b==d); cal=normalB(e(1)); calActual=cal; r=-1 end end if p==0 %GIRO DEL MOTOR DESDE ÁNGULO PREVIO AL ÁNGULO INGRESADO ACTUALMENTE for(j=calAnterior:r:calActual) j %Desactivación de botones mientras el motor está girando. set(handles.CONECTAR,'enable','off') set(handles.CALIBRAR,'enable','off'); set(handles.LEER,'enable','off'); set(handles.STOP,'enable','off');
119
%Comprobación de sistema energizado y verificación de estado %de Paro de Emergencia. PARO_ONOFF(); if p==0 %Envío de señal al motor con el valor de m. c.servoWrite(10,j) %Tiempo de espera entre cada cambio angular del motor. pause(0.3); %Lectura de posición del servo. servo=c.servoRead(10) end if p==1 set(handles.CONECTAR,'enable','off') set(handles.CALIBRAR,'enable','off'); set(handles.LEER,'enable','off'); set(handles.STOP,'enable','off'); end end end mant2=mant; calAnterior=calActual; %Habilitación de botón CALIBRAR para giro del servomotor. set(handles.CALIBRAR,'enable','on'); set(handles.LEER,'enable','on'); set(handles.STOP,'enable','on');
3.6.3.5 Rehabilitación
El proceso de rehabilitación permite al usuario ingresar los datos y
seleccionar la información para realizar el proceso de rehabilitación
personalizada a cada paciente. El diagrama de flujo mostrado en la Figura 56
sintetiza la zona de trabajo como son codo y muñeca con sus respectivos
movimientos. En el proceso de rehabilitación es necesario ingresar el ciclo de
trabajo a realizarse, la configuración del puerto USB, la comunicación USB
Matlab - Arduino para posteriormente en el proceso de Ejecución efectuar el
ciclo de trabajo ingresado por el usuario.
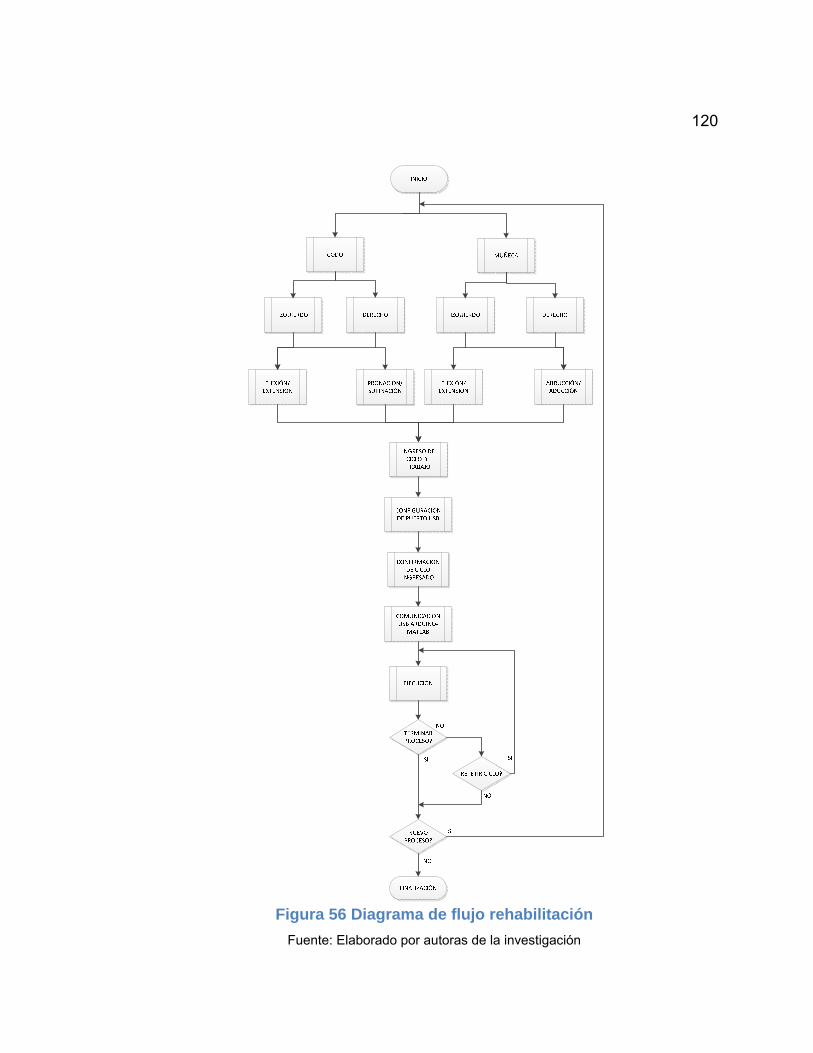
120
Figura 56 Diagrama de flujo rehabilitación
Fuente: Elaborado por autoras de la investigación
121
En la primera posibilidad de selección de proceso se considera la zona a
rehabilitar, donde es posible seleccionar una de estas zonas, ya sea codo o
muñeca.
3.6.3.5.1 Zona de articulación a rehabilitar
El prototipo ha sido diseñado tal que el usuario pueda seleccionar la
articulación del codo o la articulación de la muñeca afectada del paciente para
su rehabilitación.
3.6.3.5.2 Brazo a rehabilitar
En este caso, el usuario puede seleccionar el brazo que el paciente necesite
rehabilitar, siendo izquierdo o derecho.
3.6.3.5.3 Movimiento a realizar
Conociendo los movimientos propuestos para el prototipo, el usuario tiene
las opciones de los siguientes movimientos:
o Flexión/Extensión del codo
o Pronación/Supinación del codo
o Flexión/Extensión de la muñeca
o Abducción/Aducción de la muñeca
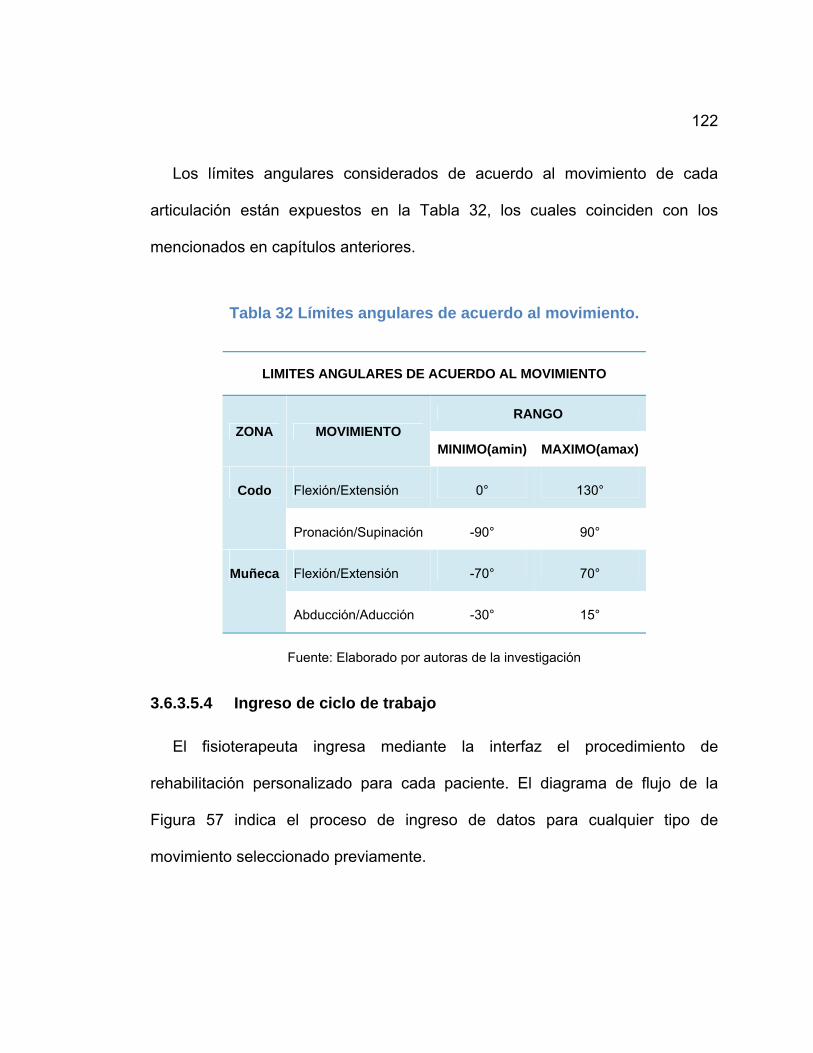
122
Los límites angulares considerados de acuerdo al movimiento de cada
articulación están expuestos en la Tabla 32, los cuales coinciden con los
mencionados en capítulos anteriores.
Tabla 32 Límites angulares de acuerdo al movimiento.
LIMITES ANGULARES DE ACUERDO AL MOVIMIENTO
ZONA MOVIMIENTO RANGO
MINIMO(amin) MAXIMO(amax)
Codo Flexión/Extensión 0° 130°
Pronación/Supinación -90° 90°
Muñeca Flexión/Extensión -70° 70°
Abducción/Aducción -30° 15°
Fuente: Elaborado por autoras de la investigación
3.6.3.5.4 Ingreso de ciclo de trabajo
El fisioterapeuta ingresa mediante la interfaz el procedimiento de
rehabilitación personalizado para cada paciente. El diagrama de flujo de la
Figura 57 indica el proceso de ingreso de datos para cualquier tipo de
movimiento seleccionado previamente.
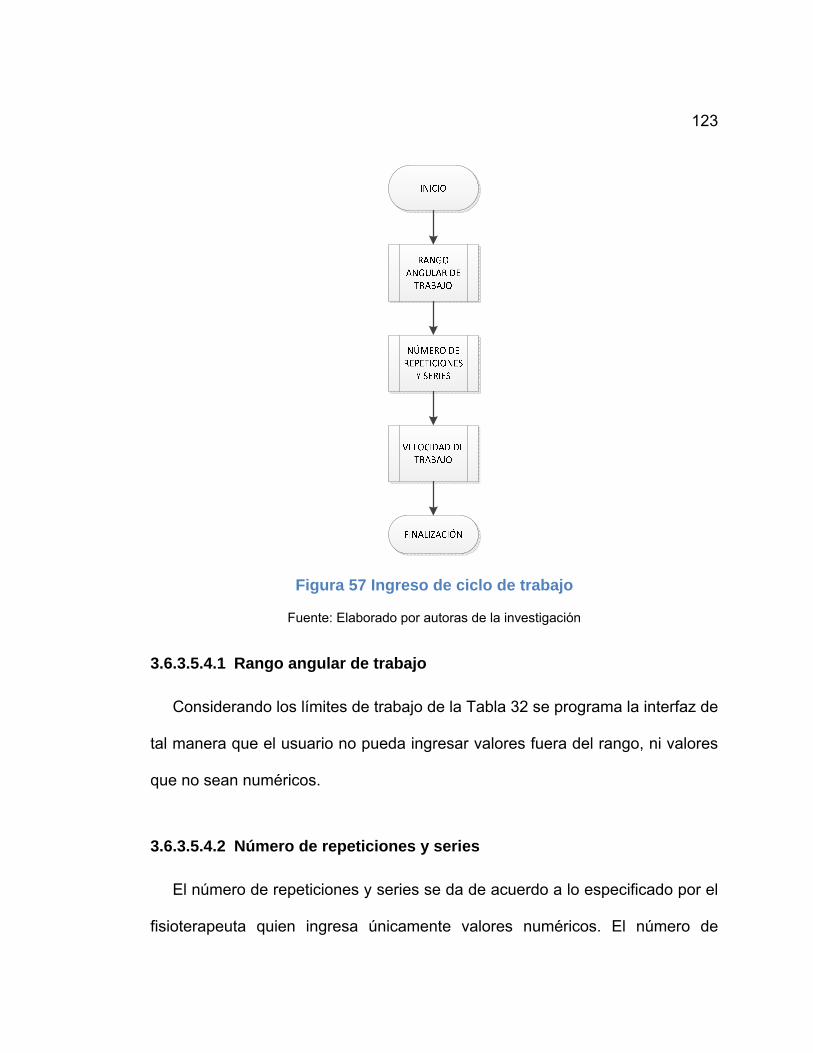
123
Figura 57 Ingreso de ciclo de trabajo
Fuente: Elaborado por autoras de la investigación
3.6.3.5.4.1 Rango angular de trabajo
Considerando los límites de trabajo de la Tabla 32 se programa la interfaz de
tal manera que el usuario no pueda ingresar valores fuera del rango, ni valores
que no sean numéricos.
3.6.3.5.4.2 Número de repeticiones y series
El número de repeticiones y series se da de acuerdo a lo especificado por el
fisioterapeuta quien ingresa únicamente valores numéricos. El número de
124
repeticiones consiste en la cantidad de veces que el sistema se moverá desde
el ángulo mínimo al ángulo máximo ingresados. El número de series se refiere
a las veces que el sistema repetirá cada serie programada por el fisioterapeuta.
3.6.3.5.4.3 Velocidad de trabajo
Por razones de seguridad al paciente se han colocado únicamente tres
posibles velocidades, baja, media y alta. Esta velocidad será seleccionada por
el fisioterapeuta tomando en cuenta el grado de dolor y de movilidad del
paciente.
3.6.3.5.5 Configuración del puerto USB
Como se enunció anteriormente, el puerto ingresado debe ser el
correspondiente al disponible para la conexión con la tarjeta Arduino.
3.6.3.5.6 Confirmación de ciclo ingresado
El usuario en este paso es capaz de confirmar los datos que ingresó
previamente para asegurarse que todo corresponde a lo deseado.
3.6.3.5.7 Comunicación USB Matlab-Arduino
Si el puerto USB ingresado previamente es correcto, la comunicación entre
Matlab y Arduino es posible generando un mensaje de aviso para
posteriormente seguir con el proceso de Ejecución.
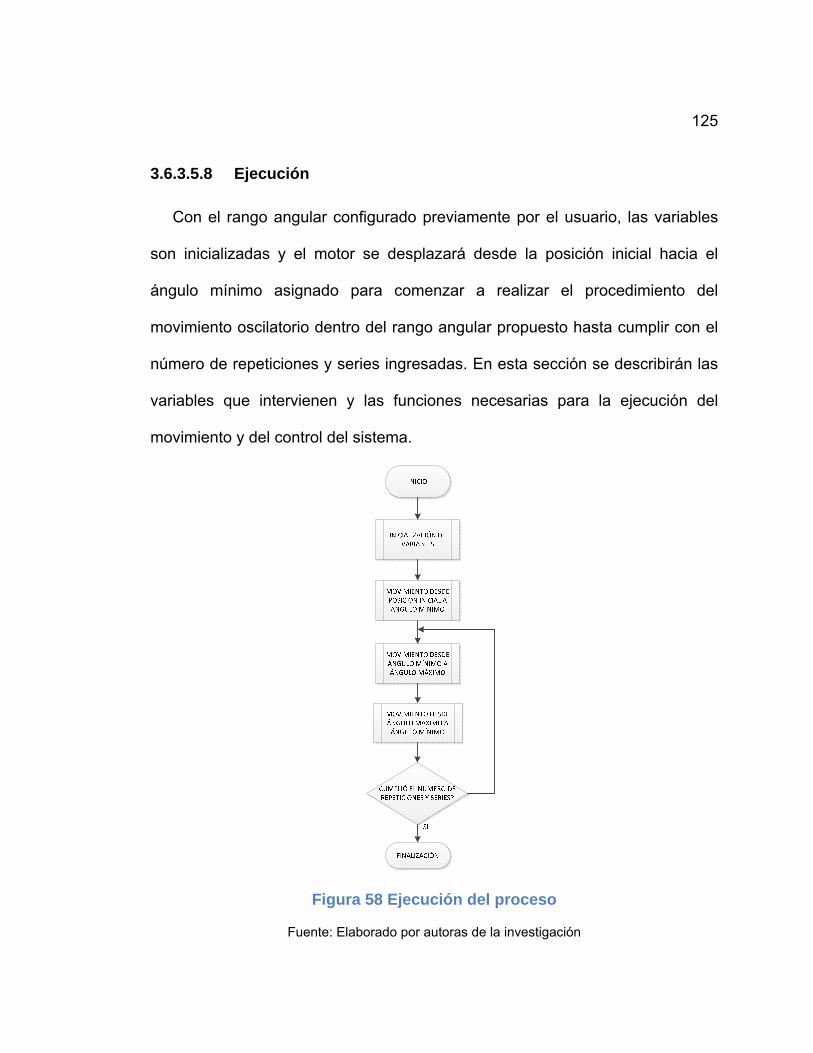
125
3.6.3.5.8 Ejecución
Con el rango angular configurado previamente por el usuario, las variables
son inicializadas y el motor se desplazará desde la posición inicial hacia el
ángulo mínimo asignado para comenzar a realizar el procedimiento del
movimiento oscilatorio dentro del rango angular propuesto hasta cumplir con el
número de repeticiones y series ingresadas. En esta sección se describirán las
variables que intervienen y las funciones necesarias para la ejecución del
movimiento y del control del sistema.
Figura 58 Ejecución del proceso
Fuente: Elaborado por autoras de la investigación
126
Previo a detallar el proceso de Inicialización de variables es necesario
describir las variables que intervienen en el programa, mostradas en la Tabla
29, la cual muestra el tipo de variable y la descripción respectiva referente a su
utilización en el programa.
3.6.3.5.8.1 Inicialización de variables
Al momento de comenzar la ejecución del programa, se deben inicializar
algunas de las variables de manera que no existan datos erróneos o tipo
basura que puedan alterar el funcionamiento correcto del programa y del
proceso en sí. Sin embargo, se mantiene la información de las variables
tomadas en el ingreso de datos de zona a rehabilitar, brazo, movimiento,
ángulos mínimo y máximo, velocidad de trabajo y número de series y
repeticiones.
3.6.3.5.8.2 Movimiento desde posición inicial a ángulo mínimo
La posición inicial del motor depende primordialmente del tipo de movimiento
y el brazo, ya sea izquierdo o derecho, por lo que una vez seleccionada esta
información y la comunicación Matlab-Arduino sea exitosa, el motor se colocará
en la posición inicial respectiva indicada en la Tabla 33 y en el proceso actual
se dirige desde la posición inicial hasta el ángulo mínimo ingresado por el
usuario en la interfaz. La función que realiza este movimiento del motor se
denomina INICIALIZAR, ver Tabla 30.
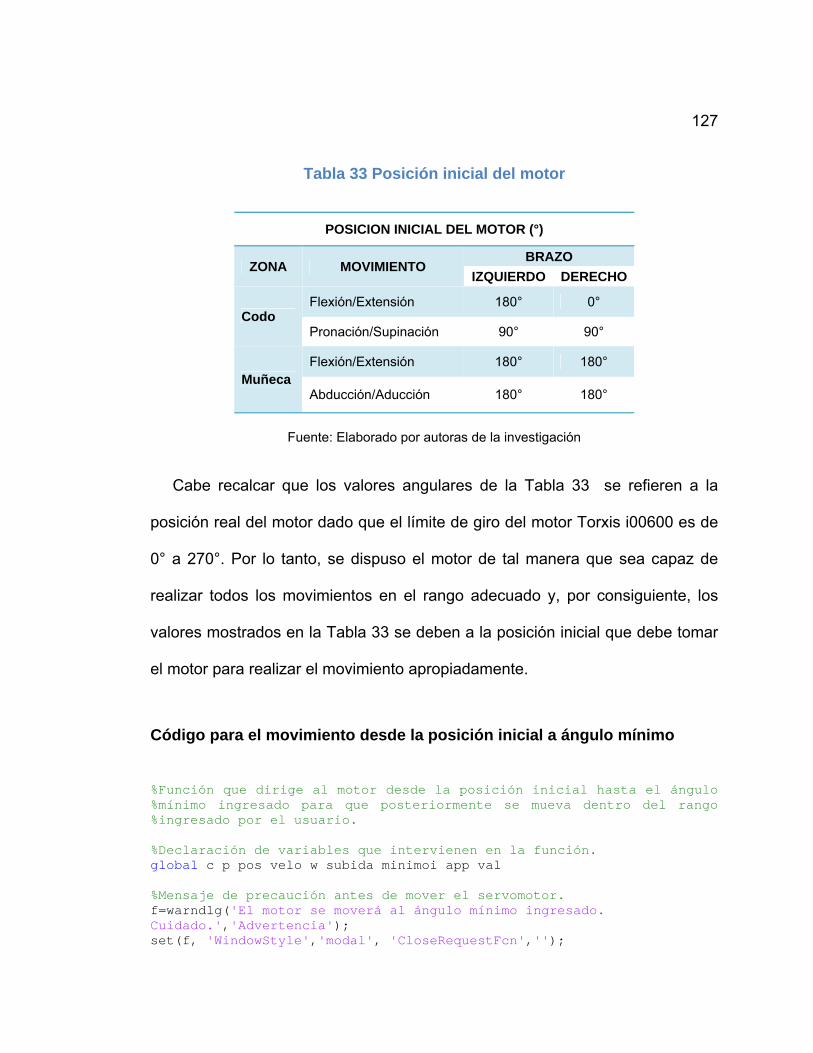
127
Tabla 33 Posición inicial del motor
POSICION INICIAL DEL MOTOR (°)
ZONA MOVIMIENTO BRAZO
IZQUIERDO DERECHO
Codo Flexión/Extensión 180° 0°
Pronación/Supinación 90° 90°
Muñeca Flexión/Extensión 180° 180°
Abducción/Aducción 180° 180°
Fuente: Elaborado por autoras de la investigación
Cabe recalcar que los valores angulares de la Tabla 33 se refieren a la
posición real del motor dado que el límite de giro del motor Torxis i00600 es de
0° a 270°. Por lo tanto, se dispuso el motor de tal manera que sea capaz de
realizar todos los movimientos en el rango adecuado y, por consiguiente, los
valores mostrados en la Tabla 33 se deben a la posición inicial que debe tomar
el motor para realizar el movimiento apropiadamente.
Código para el movimiento desde la posición inicial a ángulo mínimo
%Función que dirige al motor desde la posición inicial hasta el ángulo %mínimo ingresado para que posteriormente se mueva dentro del rango %ingresado por el usuario. %Declaración de variables que intervienen en la función. global c p pos velo w subida minimoi app val %Mensaje de precaución antes de mover el servomotor. f=warndlg('El motor se moverá al ángulo mínimo ingresado. Cuidado.','Advertencia'); set(f, 'WindowStyle','modal', 'CloseRequestFcn','');
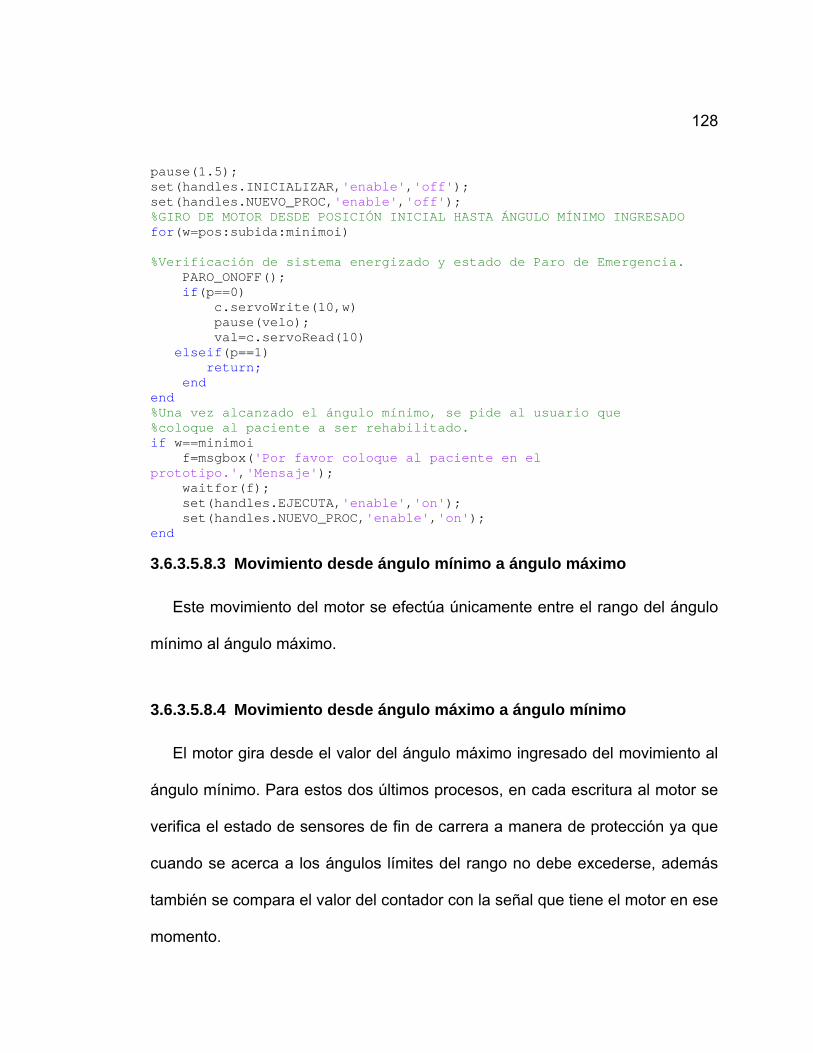
128
pause(1.5); set(handles.INICIALIZAR,'enable','off'); set(handles.NUEVO_PROC,'enable','off'); %GIRO DE MOTOR DESDE POSICIÓN INICIAL HASTA ÁNGULO MÍNIMO INGRESADO for(w=pos:subida:minimoi) %Verificación de sistema energizado y estado de Paro de Emergencia. PARO_ONOFF(); if(p==0) c.servoWrite(10,w) pause(velo); val=c.servoRead(10) elseif(p==1) return; end end %Una vez alcanzado el ángulo mínimo, se pide al usuario que %coloque al paciente a ser rehabilitado. if w==minimoi f=msgbox('Por favor coloque al paciente en el prototipo.','Mensaje'); waitfor(f); set(handles.EJECUTA,'enable','on'); set(handles.NUEVO_PROC,'enable','on'); end
3.6.3.5.8.3 Movimiento desde ángulo mínimo a ángulo máximo
Este movimiento del motor se efectúa únicamente entre el rango del ángulo
mínimo al ángulo máximo.
3.6.3.5.8.4 Movimiento desde ángulo máximo a ángulo mínimo
El motor gira desde el valor del ángulo máximo ingresado del movimiento al
ángulo mínimo. Para estos dos últimos procesos, en cada escritura al motor se
verifica el estado de sensores de fin de carrera a manera de protección ya que
cuando se acerca a los ángulos límites del rango no debe excederse, además
también se compara el valor del contador con la señal que tiene el motor en ese
momento.
129
Es decir, se comprueba que el ángulo del motor en cada momento
corresponda al giro realizado por el mismo por medio de un contador. Los
sensores colocados en el sistema también permiten determinar el sentido de
giro en caso de posible fallo del motor. Durante la ejecución de ambos
movimientos, se toma en cuenta el estado del botón de paro de emergencia
presente en la interfaz. Las funciones expuestas en la Tabla 30 que intervienen
en dichos procesos son:
o EJECUTA
o ERROR_SENSORES
o PULSOS
o CONT
o COMPARAR
o SENTIDO_GIRO
o PEM (Paro de Emergencia)
3.6.3.5.8.5 Cumplimiento del número de repeticiones y series
El número de repeticiones y series ingresadas se realiza por conteo para
que se cumpla el ciclo ingresado por el usuario a través de la interfaz. Mientras
las repeticiones y series no se hayan cumplido, el proceso sigue el movimiento
desde ángulo mínimo hasta el ángulo máximo y posteriormente el movimiento
desde ángulo máximo hacia ángulo mínimo.
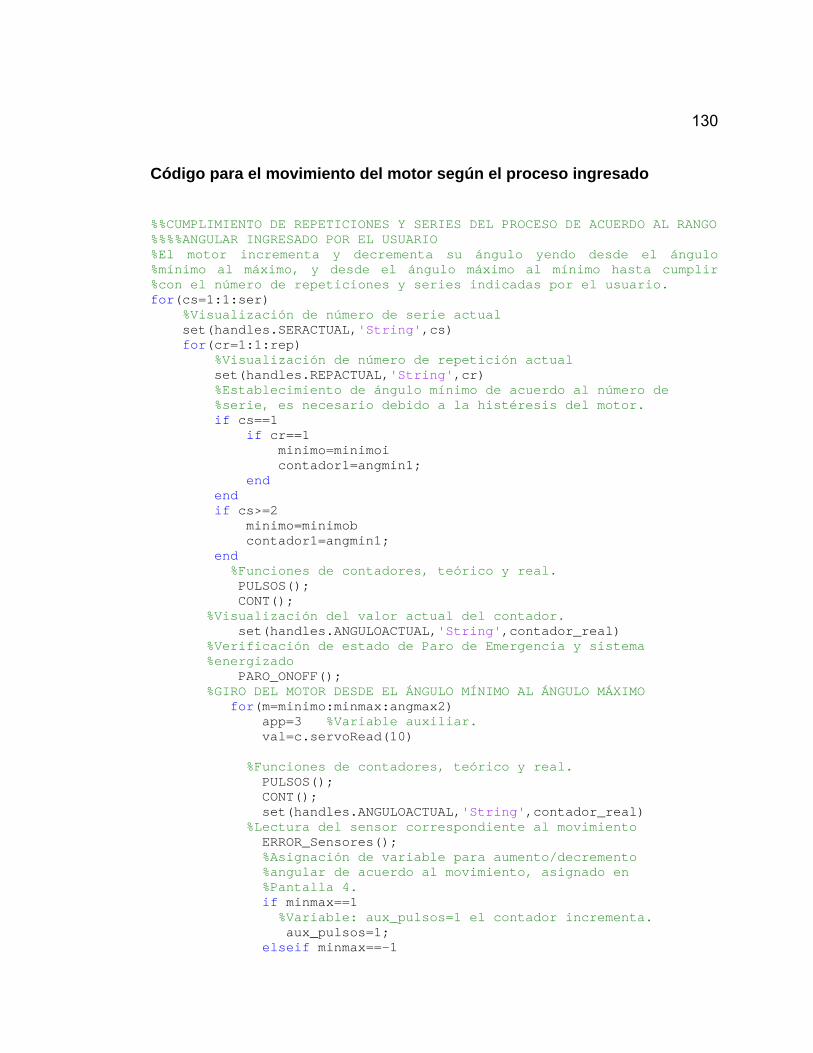
130
Código para el movimiento del motor según el proceso ingresado
%%CUMPLIMIENTO DE REPETICIONES Y SERIES DEL PROCESO DE ACUERDO AL RANGO %%%%ANGULAR INGRESADO POR EL USUARIO %El motor incrementa y decrementa su ángulo yendo desde el ángulo %mínimo al máximo, y desde el ángulo máximo al mínimo hasta cumplir %con el número de repeticiones y series indicadas por el usuario. for(cs=1:1:ser) %Visualización de número de serie actual set(handles.SERACTUAL,'String',cs) for(cr=1:1:rep) %Visualización de número de repetición actual set(handles.REPACTUAL,'String',cr) %Establecimiento de ángulo mínimo de acuerdo al número de %serie, es necesario debido a la histéresis del motor. if cs==1 if cr==1 minimo=minimoi contador1=angmin1; end end if cs>=2 minimo=minimob contador1=angmin1; end %Funciones de contadores, teórico y real. PULSOS(); CONT(); %Visualización del valor actual del contador. set(handles.ANGULOACTUAL,'String',contador_real) %Verificación de estado de Paro de Emergencia y sistema %energizado PARO_ONOFF(); %GIRO DEL MOTOR DESDE EL ÁNGULO MÍNIMO AL ÁNGULO MÁXIMO for(m=minimo:minmax:angmax2) app=3 %Variable auxiliar. val=c.servoRead(10)
%Funciones de contadores, teórico y real. PULSOS(); CONT(); set(handles.ANGULOACTUAL,'String',contador_real) %Lectura del sensor correspondiente al movimiento ERROR_Sensores(); %Asignación de variable para aumento/decremento %angular de acuerdo al movimiento, asignado en %Pantalla 4. if minmax==1 %Variable: aux_pulsos=1 el contador incrementa. aux_pulsos=1; elseif minmax==-1
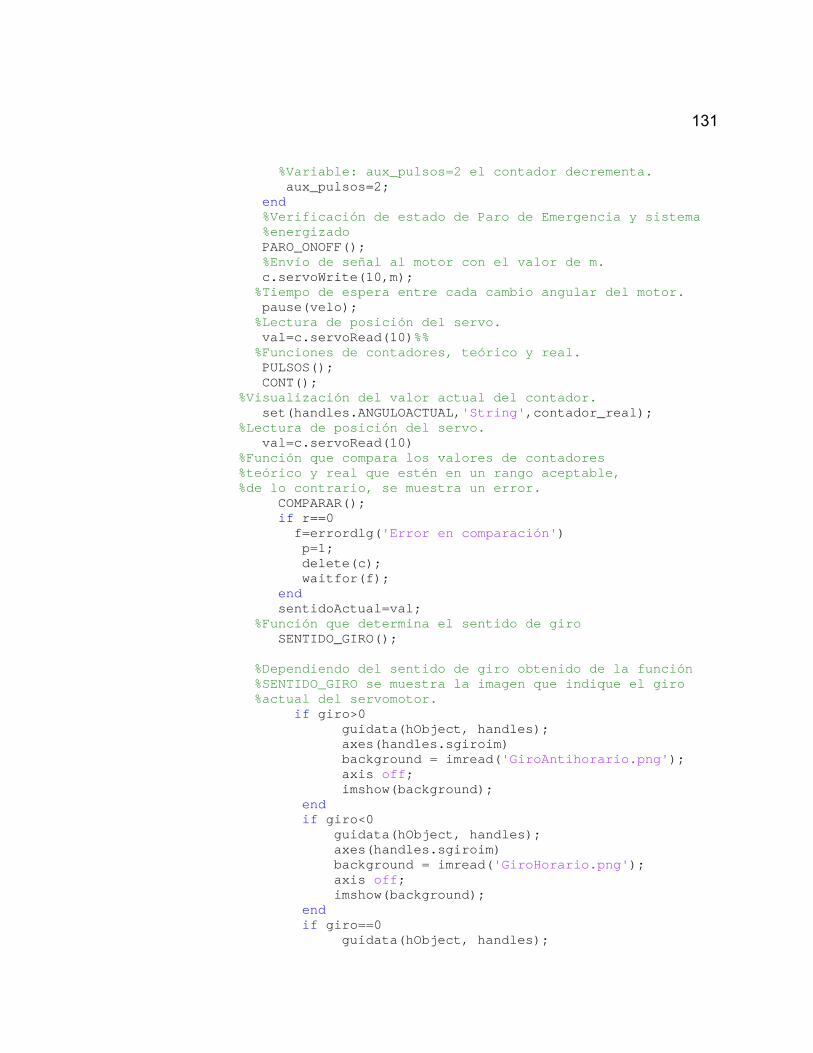
131
%Variable: aux_pulsos=2 el contador decrementa. aux_pulsos=2; end %Verificación de estado de Paro de Emergencia y sistema %energizado PARO_ONOFF(); %Envío de señal al motor con el valor de m. c.servoWrite(10,m); %Tiempo de espera entre cada cambio angular del motor. pause(velo); %Lectura de posición del servo. val=c.servoRead(10)%% %Funciones de contadores, teórico y real. PULSOS(); CONT(); %Visualización del valor actual del contador. set(handles.ANGULOACTUAL,'String',contador_real); %Lectura de posición del servo. val=c.servoRead(10) %Función que compara los valores de contadores %teórico y real que estén en un rango aceptable, %de lo contrario, se muestra un error. COMPARAR(); if r==0 f=errordlg('Error en comparación') p=1; delete(c); waitfor(f); end sentidoActual=val; %Función que determina el sentido de giro SENTIDO_GIRO();
%Dependiendo del sentido de giro obtenido de la función %SENTIDO_GIRO se muestra la imagen que indique el giro %actual del servomotor. if giro>0 guidata(hObject, handles); axes(handles.sgiroim) background = imread('GiroAntihorario.png'); axis off; imshow(background); end if giro<0 guidata(hObject, handles); axes(handles.sgiroim) background = imread('GiroHorario.png'); axis off; imshow(background); end if giro==0 guidata(hObject, handles);
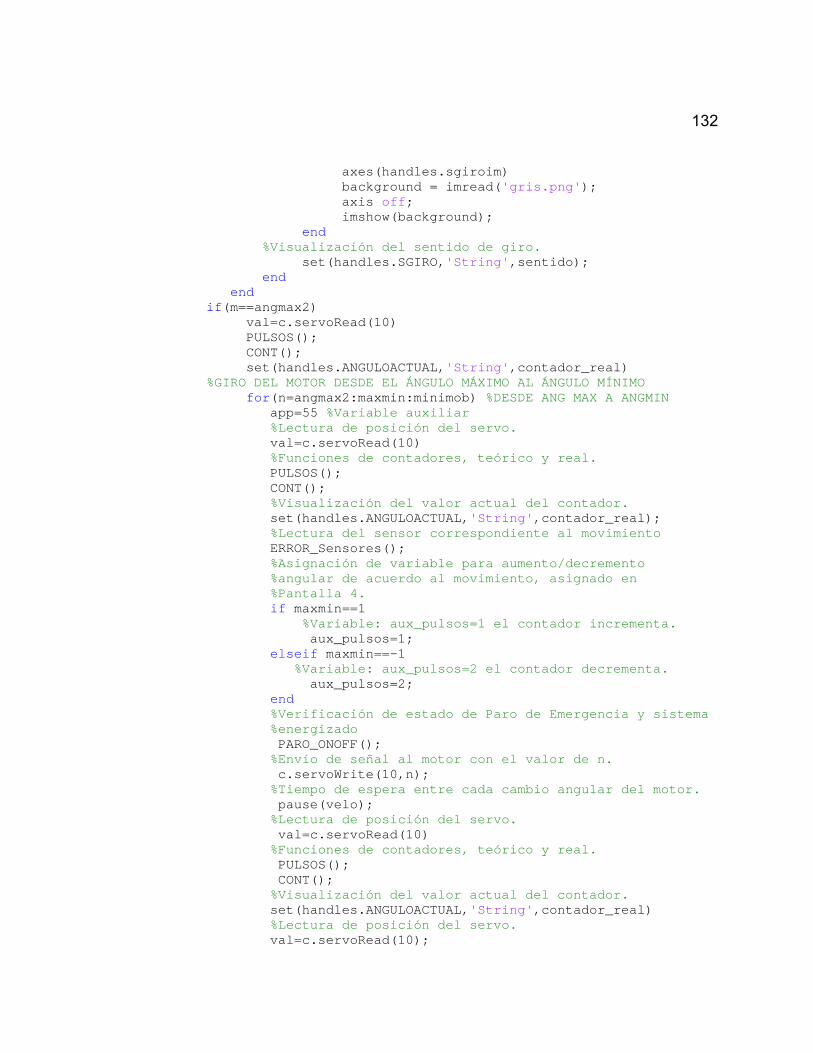
132
axes(handles.sgiroim) background = imread('gris.png'); axis off; imshow(background); end %Visualización del sentido de giro. set(handles.SGIRO,'String',sentido); end end if(m==angmax2) val=c.servoRead(10) PULSOS(); CONT(); set(handles.ANGULOACTUAL,'String',contador_real) %GIRO DEL MOTOR DESDE EL ÁNGULO MÁXIMO AL ÁNGULO MÍNIMO for(n=angmax2:maxmin:minimob) %DESDE ANG MAX A ANGMIN app=55 %Variable auxiliar %Lectura de posición del servo. val=c.servoRead(10) %Funciones de contadores, teórico y real. PULSOS(); CONT(); %Visualización del valor actual del contador. set(handles.ANGULOACTUAL,'String',contador_real); %Lectura del sensor correspondiente al movimiento ERROR_Sensores(); %Asignación de variable para aumento/decremento %angular de acuerdo al movimiento, asignado en %Pantalla 4. if maxmin==1 %Variable: aux_pulsos=1 el contador incrementa. aux_pulsos=1; elseif maxmin==-1 %Variable: aux_pulsos=2 el contador decrementa. aux_pulsos=2; end %Verificación de estado de Paro de Emergencia y sistema %energizado PARO_ONOFF(); %Envío de señal al motor con el valor de n. c.servoWrite(10,n); %Tiempo de espera entre cada cambio angular del motor. pause(velo); %Lectura de posición del servo. val=c.servoRead(10) %Funciones de contadores, teórico y real. PULSOS(); CONT(); %Visualización del valor actual del contador. set(handles.ANGULOACTUAL,'String',contador_real) %Lectura de posición del servo. val=c.servoRead(10);
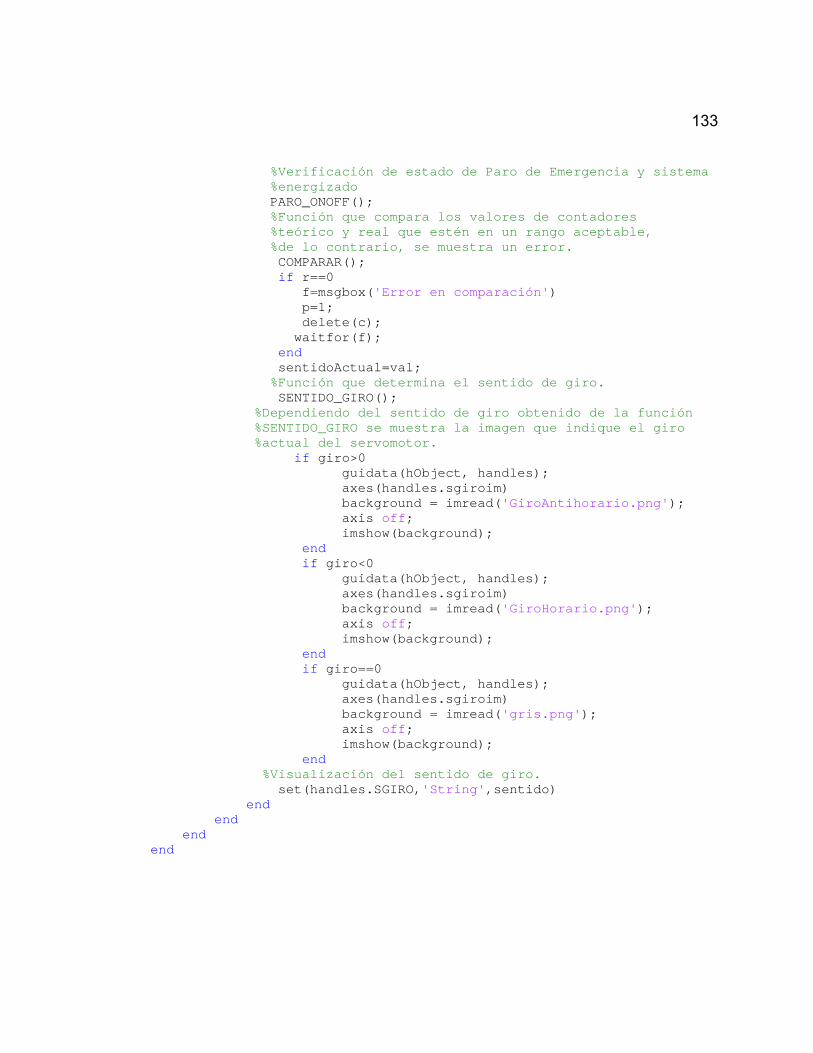
133
%Verificación de estado de Paro de Emergencia y sistema %energizado PARO_ONOFF(); %Función que compara los valores de contadores %teórico y real que estén en un rango aceptable, %de lo contrario, se muestra un error. COMPARAR(); if r==0 f=msgbox('Error en comparación') p=1; delete(c); waitfor(f); end sentidoActual=val; %Función que determina el sentido de giro. SENTIDO_GIRO(); %Dependiendo del sentido de giro obtenido de la función %SENTIDO_GIRO se muestra la imagen que indique el giro %actual del servomotor. if giro>0 guidata(hObject, handles); axes(handles.sgiroim) background = imread('GiroAntihorario.png'); axis off; imshow(background); end if giro<0 guidata(hObject, handles); axes(handles.sgiroim) background = imread('GiroHorario.png'); axis off; imshow(background); end if giro==0 guidata(hObject, handles); axes(handles.sgiroim) background = imread('gris.png'); axis off; imshow(background); end %Visualización del sentido de giro. set(handles.SGIRO,'String',sentido) end end end end
134
3.6.3.5.8.6 Término de proceso
Al momento de cumplir series y repeticiones, en la interfaz se desplaza un
mensaje para que el usuario determine si desea repetir el mismo ciclo
ingresado o si desea terminar el proceso, en caso de que el usuario desee
terminar el proceso, el motor se mueve desde el ángulo mínimo hasta la
posición inicial nuevamente.
Código para la terminación de proceso
%Al término de series y repeticiones, se pregunta al usuario si %terminar la ejecución para llevar al motor a la posición final(0°), %caso contrario, el usuario puede repetir el ciclo ingresado %anteriormente. if(cs==ser) %Imagen sin indicación de sentido de giro guidata(hObject, handles); axes(handles.sgiroim) background = imread('gris.png'); axis off; imshow(background); if(cr==rep) %Pregunta al usuario para finalmenteterminar la ejecución. f=questdlg('¿Desea terminar la ejecución?','TERMINAR','Si','No'); %Caso negativo: El usuario puede ejecutar nuevamente el %procedimiento ingresado previamente. if strcmp(f,'No') %Activación/Desactivación de botones. set(handles.INICIALIZAR,'enable','off'); set(handles.EJECUTA,'enable','on'); set(handles.NUEVO_PROC,'enable','off'); return; end %Caso afirmativo: El servomotor se dirige a la posición final(0°), %y se habilitan bototnes para que el usuario tenga opciones de %salir o de seleccionar un proceso de rehabilitación diferente. if strcmp(f,'Si')
g=warndlg('Retire al paciente del prototipo. El motor se moverá a la posición central.','Advertencia');
135
waitfor(g); %Desactivación de botones. set(handles.EJECUTA,'enable','off'); set(handles.INICIALIZAR,'enable','off'); set(handles.NUEVO_PROC,'enable','off'); set(handles.REPACTUAL,'String',''); set(handles.SERACTUAL,'String',''); set(handles.ANGULOACTUAL,'String',''); set(handles.SGIRO,'String','') %GIRO DEL MOTOR DESDE EL ÁNGULO MINIMO HASTA POSICIÓN FINAL(0°) for(t=minimob:-1:55) %DESDE ANGMIN AL 0 %Verificación de estado de Paro de Emergencia y sistema %energizado PARO_ONOFF(); %Envío de señal al motor con el valor de t. c.servoWrite(10,t) %Tiempo de espera entre cada cambio angular del motor. pause(velo); %Verificación de estado de Paro de Emergencia y sistema %energizado PARO_ONOFF(); %Lectura de posición del servo. val=c.servoRead(10)
%Una vez alcanzada la posición final, se deben desactivar %todos los botones, excepto el que permite un nuevo ingreso %de proceso. if(t==55) %Habilitación y desactivación de botones set(handles.INICIALIZAR,'enable','off'); set(handles.EJECUTA,'enable','off'); set(handles.NUEVO_PROC,'enable','on'); end end end end end
Repetición de ciclo
El usuario puede seleccionar este botón al término del ciclo para cumplir
nuevamente el proceso de principio a fin.
136
Nuevo proceso
Al presionar este botón, el usuario es dirigido inmediatamente a la pantalla
donde puede seleccionar todos los datos nuevamente, por lo tanto, todas las
variables son inicializadas completamente para el nuevo proceso a ejecutar.
3.6.4 Consideraciones de contadores durante la ejecución del
proceso
Como se mencionó anteriormente el servomotor está dispuesto de tal
manera que sea capaz de realizar todos los movimientos, por lo tanto, en la
Tabla 34. se muestra los valores de la posición inicial del motor y los valores de
contadores, es decir, la variable “contador_real” se refiere a los ángulos a los
que gira el motor, sin embargo, “contador_teorico” hace referencia al rango
angular de cada movimiento.
El usuario es capaz de ver el valor de contador real en la interfaz de usuario
para así comprobar que el paciente realice el movimiento en el rango
apropiado. Por otro lado, el contador teórico nos permite comprobar a manera
de control no visible por el usuario pero de control de programa que el motor se
encuentre en el ángulo apropiado y que gire de manera correcta.
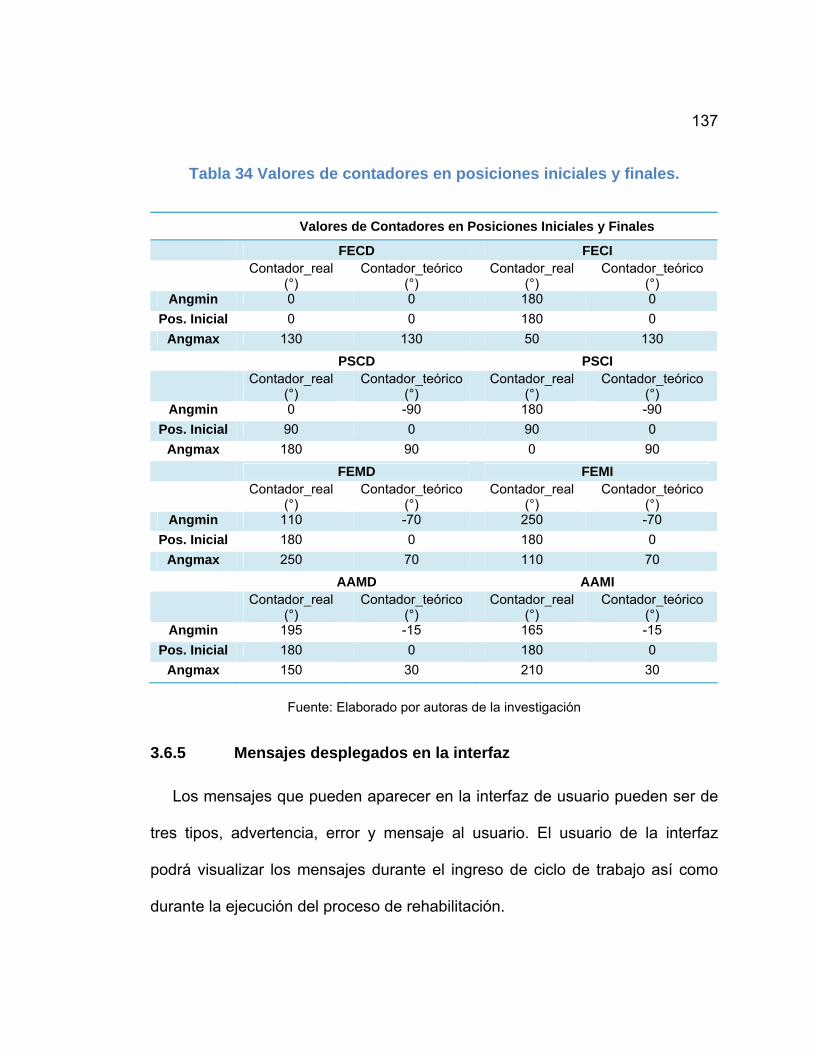
137
Tabla 34 Valores de contadores en posiciones iniciales y finales.
Valores de Contadores en Posiciones Iniciales y Finales
FECD FECI Contador_real
(°) Contador_teórico
(°) Contador_real
(°) Contador_teórico
(°) Angmin 0 0 180 0
Pos. Inicial 0 0 180 0
Angmax 130 130 50 130
PSCD PSCI Contador_real
(°) Contador_teórico
(°) Contador_real
(°) Contador_teórico
(°) Angmin 0 -90 180 -90
Pos. Inicial 90 0 90 0
Angmax 180 90 0 90
FEMD FEMI Contador_real
(°) Contador_teórico
(°) Contador_real
(°) Contador_teórico
(°) Angmin 110 -70 250 -70
Pos. Inicial 180 0 180 0
Angmax 250 70 110 70
AAMD AAMI Contador_real
(°) Contador_teórico
(°) Contador_real
(°) Contador_teórico
(°) Angmin 195 -15 165 -15
Pos. Inicial 180 0 180 0
Angmax 150 30 210 30
Fuente: Elaborado por autoras de la investigación
3.6.5 Mensajes desplegados en la interfaz
Los mensajes que pueden aparecer en la interfaz de usuario pueden ser de
tres tipos, advertencia, error y mensaje al usuario. El usuario de la interfaz
podrá visualizar los mensajes durante el ingreso de ciclo de trabajo así como
durante la ejecución del proceso de rehabilitación.
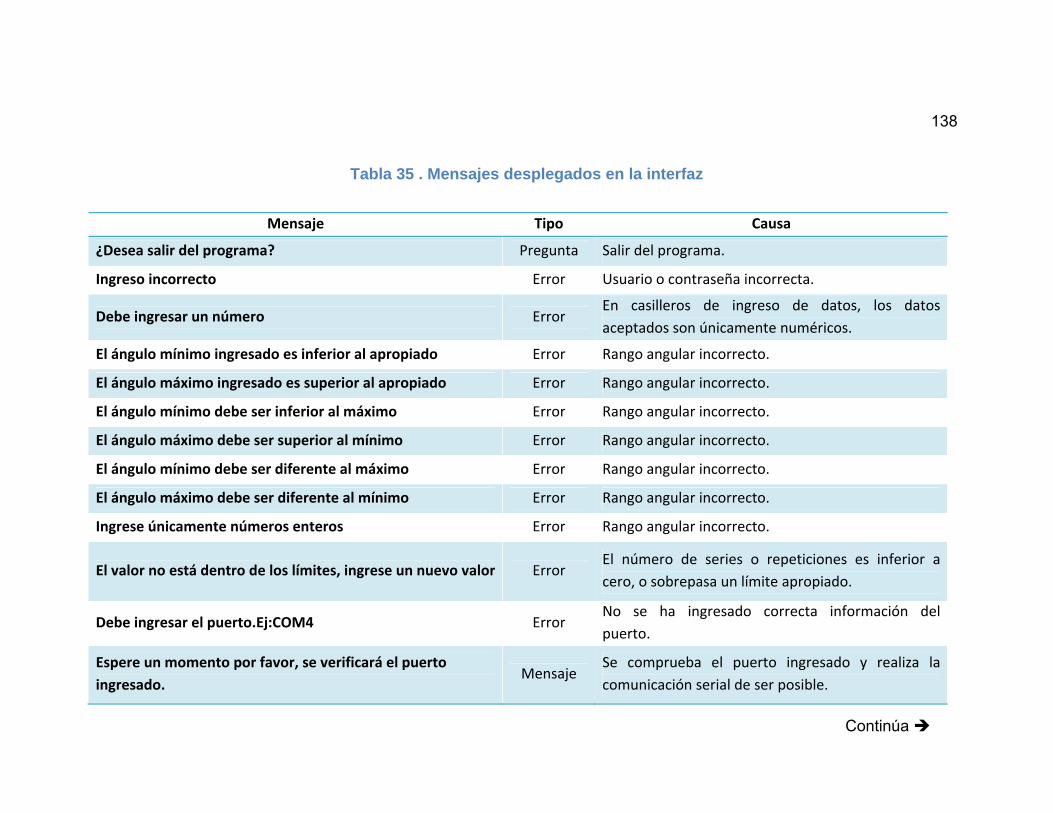
138
Tabla 35 . Mensajes desplegados en la interfaz
Mensaje Tipo Causa
¿Desea salir del programa? Pregunta Salir del programa.
Ingreso incorrecto Error Usuario o contraseña incorrecta.
Debe ingresar un número Error En casilleros de ingreso de datos, los datos
aceptados son únicamente numéricos.
El ángulo mínimo ingresado es inferior al apropiado Error Rango angular incorrecto.
El ángulo máximo ingresado es superior al apropiado Error Rango angular incorrecto.
El ángulo mínimo debe ser inferior al máximo Error Rango angular incorrecto.
El ángulo máximo debe ser superior al mínimo Error Rango angular incorrecto.
El ángulo mínimo debe ser diferente al máximo Error Rango angular incorrecto.
El ángulo máximo debe ser diferente al mínimo Error Rango angular incorrecto.
Ingrese únicamente números enteros Error Rango angular incorrecto.
El valor no está dentro de los límites, ingrese un nuevo valor Error El número de series o repeticiones es inferior a
cero, o sobrepasa un límite apropiado.
Debe ingresar el puerto.Ej:COM4 Error No se ha ingresado correcta información del
puerto.
Espere un momento por favor, se verificará el puerto
ingresado. Mensaje
Se comprueba el puerto ingresado y realiza la
comunicación serial de ser posible.
Continúa
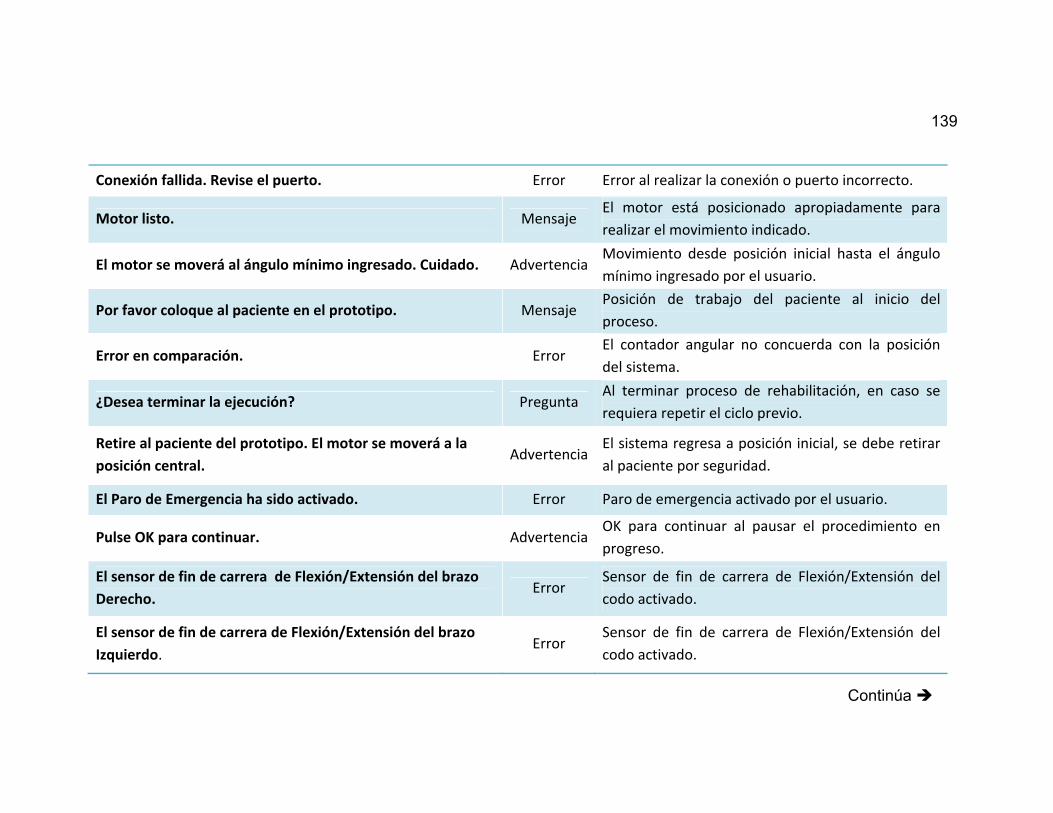
139
Conexión fallida. Revise el puerto. Error Error al realizar la conexión o puerto incorrecto.
Motor listo. Mensaje El motor está posicionado apropiadamente para
realizar el movimiento indicado.
El motor se moverá al ángulo mínimo ingresado. Cuidado. AdvertenciaMovimiento desde posición inicial hasta el ángulo
mínimo ingresado por el usuario.
Por favor coloque al paciente en el prototipo. Mensaje Posición de trabajo del paciente al inicio del
proceso.
Error en comparación. Error El contador angular no concuerda con la posición
del sistema.
¿Desea terminar la ejecución? Pregunta Al terminar proceso de rehabilitación, en caso se
requiera repetir el ciclo previo.
Retire al paciente del prototipo. El motor se moverá a la
posición central. Advertencia
El sistema regresa a posición inicial, se debe retirar
al paciente por seguridad.
El Paro de Emergencia ha sido activado. Error Paro de emergencia activado por el usuario.
Pulse OK para continuar. AdvertenciaOK para continuar al pausar el procedimiento en
progreso.
El sensor de fin de carrera de Flexión/Extensión del brazo
Derecho. Error
Sensor de fin de carrera de Flexión/Extensión del
codo activado.
El sensor de fin de carrera de Flexión/Extensión del brazo
Izquierdo. Error
Sensor de fin de carrera de Flexión/Extensión del
codo activado.
Continúa
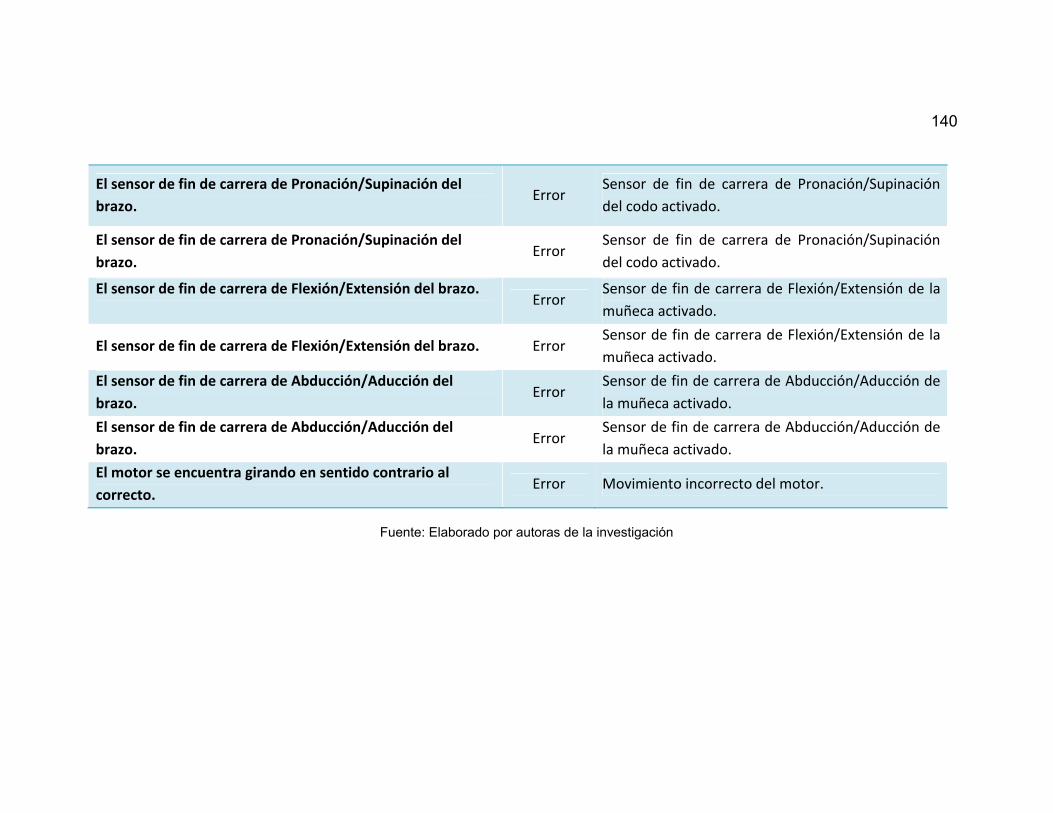
140
El sensor de fin de carrera de Pronación/Supinación del
brazo. Error
Sensor de fin de carrera de Pronación/Supinación
del codo activado.
El sensor de fin de carrera de Pronación/Supinación del
brazo. Error
Sensor de fin de carrera de Pronación/Supinación
del codo activado.
El sensor de fin de carrera de Flexión/Extensión del brazo.
Error
Sensor de fin de carrera de Flexión/Extensión de la
muñeca activado.
El sensor de fin de carrera de Flexión/Extensión del brazo. Error Sensor de fin de carrera de Flexión/Extensión de la
muñeca activado.
El sensor de fin de carrera de Abducción/Aducción del
brazo. Error
Sensor de fin de carrera de Abducción/Aducción de
la muñeca activado.
El sensor de fin de carrera de Abducción/Aducción del
brazo. Error
Sensor de fin de carrera de Abducción/Aducción de
la muñeca activado.
El motor se encuentra girando en sentido contrario al
correcto. Error Movimiento incorrecto del motor.
Fuente: Elaborado por autoras de la investigación





























