Embed Size (px)
Citation preview

Desarrollo de una metodología para el cálculo integral de la energía de un
vehículo eléctrico en la zona de ciudad salitre mediante el análisis energético del
vehículo centrado en el freno regenerativo.
Proyecto de grado presentado como requisito parcial para optar al título de ingeniero mecánico.
David Alejandro Victoria Cañón
Correo: [email protected]
Código: 200923337
Asesor:
Luis Ernesto Muñoz Camargo
Ingeniero Mecánico, M.Sc., Ph.D.
UNIVERSIDAD DE LOS ANDES
FACULTAD DE INGENIERÍA
DEPARTAMENTO DE INGENIERÍA MECÁNICA
BOGOTÁ D.C.
Junio 2015

6
Índice de general. 1. Introducción: ........................................................................................................ 9
2. Estado del arte. ................................................................................................. 10
2.1 Tipos de sistemas de regeneración de energía. ......................................... 10
2.1.1 KERS (Kinetic energy recovery system) ................................................... 11
2.1.2 Freno regenerativo en vehículos eléctricos. .......................................... 12
2.2 Instrumentación para las pruebas de campo. .............................................. 14
2.2.1 GPS VBOX III ....................................................................................... 14
2.2.2 GPS VBOX Sport................................................................................... 15
2.3 Modelo energético ....................................................................................... 15
2.4 Selección de sector y circuito ...................................................................... 16
2.5 División del recorrido en microciclos. ........................................................... 16
2.7 Análisis de circuito y de pruebas en conjunto. ............................................. 16
2.8 Vehículo de pruebas BYD e6 ....................................................................... 17
3. Objetivos ........................................................................................................... 18
3.1 Objetivo general ........................................................................................... 18
3.2 Objetivos específicos. .................................................................................. 18
4. Metodología. ..................................................................................................... 18
4.3 Metodología para procesamiento de datos .................................................. 19
4.3.1 Obtención de microciclos con el programa Vbox Tools ........................ 19
4.3.2 Obtención de variables energéticas y estadísticas. ............................... 20
4.3.3 Filtro Savitzky golay. .............................................................................. 27
4.4 Comparación de resultados con los datos obtenidos del vehículo. ......... 27
5. Toma de datos experimentales. ........................................................................ 28
5.1 Diseño experimental .................................................................................... 28
5.2 Toma de datos experimental. ..................................................................... 30
5.2.1 Prueba de distancia. .............................................................................. 31
5.2.2 Prueba de Velocidad. ............................................................................ 33
5.3 Toma de datos experimental. ..................................................................... 34
5.3.1 Pruebas preliminares en el circuito. ....................................................... 34
5.3.2 Toma de datos experimentales. ............................................................ 35
5.3 Procesamiento de datos. ............................................................................. 36
5.3.1 Obtención de microciclos con el programa Vbox Tools. ........................ 36

7
5.3.2 Resultados del perfil de altura. .............................................................. 38
5.3.3 Filtrado de datos de velocidad y aceleración. ........................................ 38
6 Resultados ......................................................................................................... 39
6.1 Resultados de variables estadísticas y energéticas..................................... 39
6.2 Comparación de resultados con los datos obtenidos del vehículo. ............. 51
7. Conclusiones y recomendaciones. .................................................................... 53
Referencias: .......................................................................................................... 54
Anexos .................................................................................................................. 56
Índice de gráficas.
Grafica 1. División de un tramo del circuito en microciclos. .................................. 20
Grafica 2. Microciclo individual. ............................................................................. 20
Grafica 3. Resultado prueba de distancia. ............................................................ 32
Grafica 4. Resultado prueba de velocidad. (Velocidad analizada entre líneas rojas)
.............................................................................................................................. 33
Grafica 5. Velocidad vs tiempo tramo de circuito con elementos para realizar el
corte. ..................................................................................................................... 36
Grafica 6. Microciclo. ............................................................................................. 37
Grafica 7. Selección de variables de interés. ........................................................ 37
Grafica 8. Perfil de altura obtenido. ....................................................................... 38
Grafica 9. Perfil de inclinación. .............................................................................. 38
Grafica 10. Influencia del filtro en la distribución de velocidad. ............................ 38
Grafica 11. Influencia del filtro en el perfil de aceleración. .................................... 39
Grafica 12. Distribución de velocidad del primer microciclo. ................................. 40
Grafica 13. Potencia de interacción del microciclo. ............................................... 40
Grafica 14. Consumo energético del microciclo en %. ......................................... 41
Grafica 15. Distribución de energía de frenado en%. ............................................ 41
Grafica 16. Descarga de la batería durante el microciclo. .................................... 42
Grafica 17. Distribución de velocidad del microciclo. ............................................ 43
Grafica 18. Potencia de interacción del microciclo ................................................ 44
Grafica 19. Consumo energético del microciclo en %. ........................................ 44
Grafica 20. Distribución de energía de frenado en%. ............................................ 45
Grafica 21. Descarga de la batería durante el microciclo. .................................... 45
Grafica 22.Energía regenerada vs Vprom ............................................................. 47
Grafica 23. Energía regenerada vs σ^2 ................................................................ 48
Grafica 24. Energía regenerada vs Sks ................................................................ 49
Grafica 25. Energía regenerada vs Ks. ................................................................. 49
Grafica 26. Diferencia entre Energía consumida y Energía regenerada en la
Prueba 1. .............................................................................................................. 51

8
Grafica 27.Diferencia entre Energía consumida y Energía regenerada en la Prueba
2. ........................................................................................................................... 51
Grafica 28.Diferencia entre Energía consumida y Energía regenerada en la Prueba
3 ............................................................................................................................ 51
Grafica 29. Diferencia entre Energía consumida y Energía regenerada en la
Prueba 4 ............................................................................................................... 51
Índice de ilustraciones.
Ilustración 1. Sistema KERS con volante de inercia (Volvo-Cars., 2014) ............. 11
Ilustración 2. Sistema KERS eléctrico. .................................................................. 12
Ilustración 3. Tablero de instrumentos BYD E6. .................................................... 13
Ilustración 4.GPS VBOX III racelogic. ................................................................... 14
Ilustración 5. GPS VBOX Sport racelogic. ............................................................ 15
Ilustración 6. Vehículo eléctrico utilizado. ............................................................. 17
Ilustración 6. Fuerzas de interacción en el modelo de dinámica longitudinal. ....... 21
Ilustración 8. Relación de Vprom, y Kts con la distribución. ............................. 26
Ilustración 9. Relación Sks con la distribución. ..................................................... 26
Ilustración 7.Circuito diseñado para la toma de datos. .......................................... 29
Ilustración 8. Antenas de VBOX III y VBOX Sport ................................................. 31
Ilustración 9. VBOX III dentro del vehículo. ........................................................... 31
Ilustración 10. VBOX Sport dentro del vehículo. ................................................... 31
Ilustración 11. Espacio destinado para las pruebas. ............................................. 32
Ilustración 12. Vbox Sport en el vehículo eléctrico. ............................................... 35
Ilustración 13. Antena Vbox Sport en vehículo eléctrico. ...................................... 35
Índice de tablas.
Tabla 1.Características Principales del vehículo de pruebas. ............................... 17
Tabla 2. Variables obtenidas de Vbox Tools. ........................................................ 19
Tabla 3.Variables relevantes en el proyecto. ........................................................ 25
Tabla 4. Comparación entre los instrumentos de medición. ................................. 28
Tabla 5. Tramos del circuito, distancia y tiempo estimado. ................................... 30
Tabla 6. Resultados de las pruebas de distancia .................................................. 32
Tabla 7.Resultados pruebas de velocidad. ........................................................... 34
Tabla 8. Energías y porcentajes involucrados en el microciclo. ............................ 43
Tabla 9. Energías y porcentajes involucrados en el microciclo. ............................ 46
Tabla 10. Variables estadísticas de microciclos. ................................................... 46
Tabla 11. Resultados globales energéticos. ......................................................... 52
Tabla 12. Porcentaje de error en distancia y consumo. ........................................ 52
Tabla 13. Consumo kWh/km. ................................................................................ 53

9
1. Introducción.
La problemática ambiental y energética en la cual está inmersa la sociedad actual,
es generada principalmente por la utilización de automotores de combustión
interna; esto ha llevado a desarrollar nuevos tipos de tecnologías amigables con el
medio ambiente, centrándose en la locomoción dentro de las ciudades en
vehículos eléctricos. Sin embargo, este nuevo tipo de tecnologías se ha
caracterizado por la autonomía limitada y para casos como la ciudad de Bogotá,
ciertas zonas de la misma presentan un reto energético muy grande para la
tecnología lo que la vuelve poco eficiente.
Profundizando en el tema, los vehículos eléctricos tienen diversos métodos de
recuperación energética; estos permiten aumentar la autonomía del mismo,
recargando las baterías mientras se conduce. Dentro de estos sistemas de
regeneración de energía se encuentra el freno regenerativo dinámico.
El sistema mencionado, está basado en el principio de usar un motor eléctrico
como generador. En este caso el motor del vehículo es el elegido para llevar a
cabo la tarea, suministrando la energía generada por este (generador) a las
baterías del mismo. El sistema posee la ventaja de utilizar el eje de potencia del
vehículo como fuente de energía cinética, sin embargo posee la limitante de la
velocidad de rotación del mismo teniendo un límite superior e inferior para la
regeneración de energía, entendido a partir de los regímenes de funcionamiento
del motor (generador) eléctrico. Sin embargo, la capacidad regenerativa del
sistema esta supedita a factores considerados en planta pero que se vuelven
críticos en una ciudad como Bogotá.
Continuando con lo mencionado, los factores críticos para el freno regenerativo en
el caso puntual de Bogotá son principalmente: Los inminentes problemas de
movilidad por el deterioro de la malla vial, la excesiva cantidad de automotores en
las calles generando un tránsito lento y discontinuo y por último la topografía
variable de la ciudad por nombrar los más importantes.
Teniendo lo anterior en mente, las diferentes zonas de la ciudad son el punto
donde convergen los factores mencionados pues es sabido que dependiendo de
la zona se cuenta con diferentes panoramas en cuanto a tráfico, malla vial y
topografía, dichas variables son fácilmente cuantificables por medio de inspección
vial y mapas de la ciudad disponibles en medios magnéticos dadas diferentes
entidades estatales.
En el caso puntual, la nueva tecnología de taxis eléctricos que llegó a la ciudad de
Bogotá marca BYD-e6, hace referencia al freno regenerativo dinámico como su
fuente principal de recuperación de energía. Dicha regeneración es esencial para

10
alcanzar el valor de autonomía reportada en el catálogo de 300km (BYD-
Company-Limited, 2014). Además de esto, el vehículo cuenta con un sistema
electrónico que reporta la cantidad de energía regenerada que es nuevamente
almacenada en las baterías para su posterior uso.
Con estas variables definidas, el presente proyecto de grado busca desarrollar una
metodología que permita calcular la energía suministrada por del freno
regenerativo al vehículo eléctrico BYD-6 en un día de trabajo en una zona
específica de la ciudad de Bogotá. Se escogió la zona de Ciudad Salitre por la alta
demanda de taxis, la afluencia desde y hacia el aeropuerto por parte de la
población flotante en los hoteles, la cercanía al terminal de transporte y además
por la condición de zona residencial que requiere de este servicio público de
manera constante, todo esto con el fin de determinar la autonomía real del
vehículo operando en la zona especificada y observar como las condiciones de la
misma afecta la eficiencia de conversión de energía del vehículo para a futuro
poder operar de manera energéticamente eficiente el vehículo.
2. Estado del arte.
La regeneración de energía en los vehículos ha sido utilizada como un elemento
complementario a las demandas energéticas cambiantes en el mundo automotriz.
En un inicio este concepto se utilizó para desarrollar dispositivos experimentales
en la Formula 1 permitiéndole a estos vehículos aumentar su rendimiento en
carrera. Con el tiempo, dichos dispositivos han sido modificados para ser
implementados en los autos de calle, para obtener las ventajas ya probadas en
carrera.
Del mismo modo para poder calcular la cantidad de energía recuperada por el
sistema, es necesario realizar una instrumentación que permita medir diferentes
variables como velocidad, posición y aceleración que son experimentadas por el
vehículo durante su operación pues conociéndolas es posible realizar una
cuantificación de la energía recuperada por el vehículo.
2.1 Tipos de sistemas de regeneración de energía.
A continuación se presentaran dos tipos de sistemas de regeneración de energía,
que han permitido el avance de la industria automotriz especialmente en el campo
de vehículos eléctricos. Uno de estos dos sistemas es el que permite la
regeneración de energía en el vehículo BYD-E6 y es el freno regenerativo, por otro

11
lado, el KERS también es usado en un amplio margen con una serie de
modificaciones en la industria automotriz y también permite ampliar el espectro de
cómo funcionan estos sistemas de regeneración de energía.
2.1.1 KERS (Kinetic energy recovery system).
El sistema de recuperación de energía cinética, fue desarrollado en un principio en
los autos de Fórmula 1 para realizar sobrepasos. Sin embargo con el paso del
tiempo este sistema se ha ido implementando en los autos de calle como
complemento del motor para ahorrar combustible. Hay diferentes configuraciones
de KERS, sin embargo el más utilizado comercialmente es el siguiente (Boretti,
2010):
- Durante el frenado del automóvil, se le da independencia al tren de potencia
para que gire libre sin acción del motor de combustión interna.
- Por medio del eje de potencia se alimenta un sistema de almacenamiento
de energía bien sea eléctrico (batería) o cinético (volante de inercia).
- La energía almacenada es entregada nuevamente al tren de potencia del
vehículo alivianando la carga del motor sobre el mismo.
Ilustración 1. Sistema KERS con volante de inercia (Volvo-Cars., 2014)

12
Ilustración 2. Sistema KERS eléctrico.
El sistema KERS tanto eléctrico como mecánico (con volante de inercia) presentan
cada uno diferentes ventajas y desventajas, por ejemplo, el sistema mecánico
tiene la desventaja de poder almacenar energía por periodos cortos de tiempo
dado su principio de funcionamiento rotante pues habrá perdidas por fricción y
desgaste en los componentes mecánicos, sin embargo la eficiencia de conversión
de energía es alta dado que no se genera transformación de la misma pues
siempre permanece como energía cinética obteniendo hasta un 70% de eficiencia
(Boretti, 2010). Por otro lado el sistema eléctrico posee la desventaja de tener
muchos ciclos de conversión de energía, de cinética a eléctrica, de eléctrica a
química y viceversa, por lo cual su eficiencia puede ser disminuida hasta en un
64% (Boretti, 2010), sin embargo, puede conservar la energía almacenada por
mucho más tiempo dado que es almacenada en las baterías generalmente, pues
se ha desarrollado una nueva forma de almacenar la energía eléctrica sin
necesidad de conversión a energía química es decir sin la necesidad de uso de
una batería. Esto se realiza utilizando un súper-capacitor, que es capaz de
almacenar la energía eléctrica regenerada, por lo que se aumenta la eficiencia de
conversión de energía de éste sistema. Cabe resaltar que estos sistemas fueron
desarrollados como apoyo a la planta motriz de combustión interna para alivianar
y/o potenciar su capacidad y no son sistemas dedicados a dar autonomía a los
vehículos.
2.1.2 Freno regenerativo en vehículos eléctricos.
El freno regenerativo ha sido desarrollado como parte del soporte para la
utilización de vehículos puramente eléctricos como principal fuente de locomoción.
Un freno regenerativo es un dispositivo que permite reducir la velocidad de
un vehículo transformando parte de su energía cinética en energía eléctrica. Esta
energía eléctrica es almacenada para un uso futuro. El freno regenerativo en
trenes eléctricos alimenta la fuente de energía del mismo, en los vehículos
eléctricos, esta energía es almacenada en el banco de baterías (López, 2013), en
súper-capacitores o que dicha energía sirva para impulsar un dispositivo que
apoye la locomoción del vehículo.
13
El freno regenerativo en un vehículo eléctrico, usa el eje de potencia del automóvil
como fuente de energía. Esto se debe que al momento del frenado, éste sigue
girando y es ésta energía cinética la que se utiliza para hacer girar el motor pero
este cambia su configuración electrónica y se comporta como un generador
obteniendo energía eléctrica que es almacenada en el banco de baterías. Este
sistema tiene como ventaja que puede ser usado de forma continua y paralela a
los frenos de disco o banda tradicionales utilizados en los vehículos. El estar
acoplado al eje de potencia simplifica en gran medida sus condiciones de
operación y funcionamiento, sin embargo es también su mayor desventaja, pues
está limitado a los regímenes de conversión de energía del motor eléctrico
funcionando como generador. Estas limitaciones son en velocidad angular y
momento par sobre el eje, por lo cual a momentos pares y velocidades bajas el
freno regenerativo no opera, pues la inducción sobre el motor es muy pequeña
para que el motor (generador) logre convertir satisfactoriamente energía cinética
en eléctrica y de forma similar a torques y velocidades angulares muy altas, se
generan inducciones muy altas sobre el motor (generador), lo que no permite que
el freno opere de manera satisfactoria debido a inducciones muy altas sobre el
motor y/o las baterías lo que generaría una sobrecarga en el sistema haciéndolo
fallar.
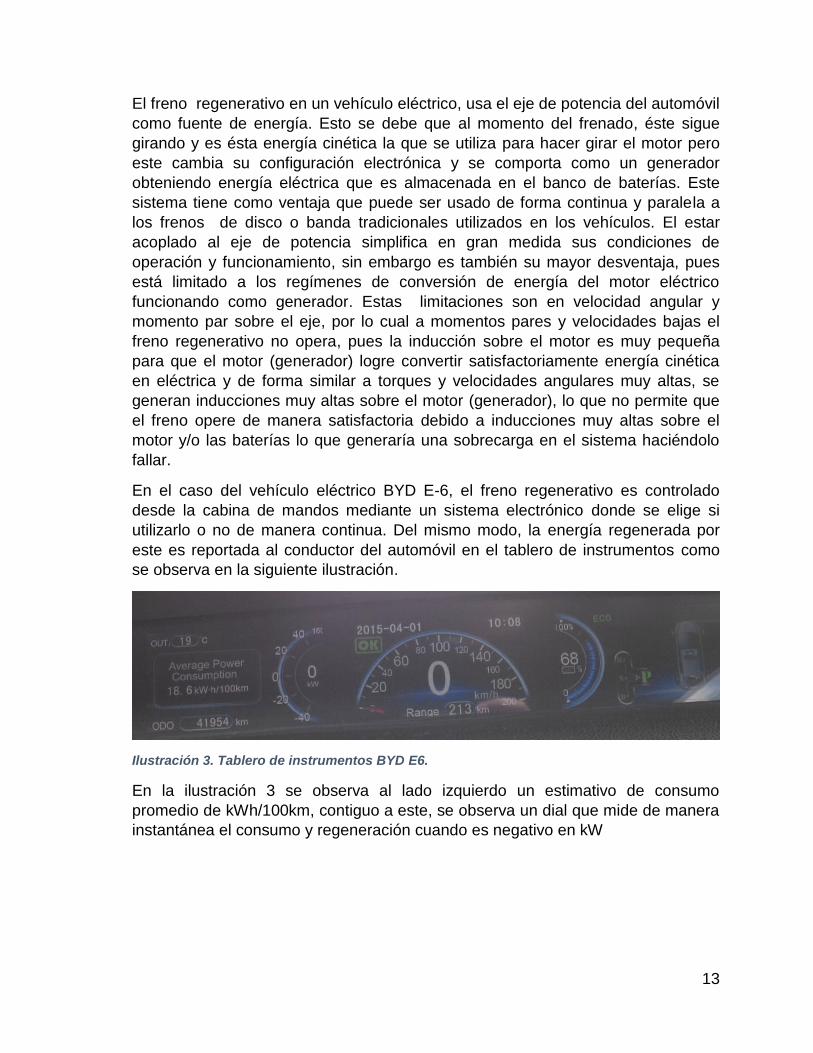
En el caso del vehículo eléctrico BYD E-6, el freno regenerativo es controlado
desde la cabina de mandos mediante un sistema electrónico donde se elige si
utilizarlo o no de manera continua. Del mismo modo, la energía regenerada por
este es reportada al conductor del automóvil en el tablero de instrumentos como
se observa en la siguiente ilustración.
Ilustración 3. Tablero de instrumentos BYD E6.
En la ilustración 3 se observa al lado izquierdo un estimativo de consumo
promedio de kWh/100km, contiguo a este, se observa un dial que mide de manera
instantánea el consumo y regeneración cuando es negativo en kW

14
2.2 Instrumentación para las pruebas de campo.
La instrumentación disponible para las pruebas de desempeño en el campo son
esenciales para el desarrollo del proyecto, esto porque las diferentes variables que
permitirán determinar la energía regenerada por el vehículo eléctrico son medidas
en tiempo real y de manera inmediata, además de esto se debe tener en cuenta la
disponibilidad de la misma al momento de realizar las pruebas y es por esto que
se escogieron dos tipos de instrumentos que permiten medir las variables de
interés y que están disponibles en el departamento de ingeniería mecánica de la
universidad.
Estos instrumentos son dispositivos GPS que permiten medir y guardar en tiempo
real las variables cinemáticas involucradas en el movimiento del vehículo las
cuales son necesarias para alimentar el modelo energético que será utilizado para
analizar energéticamente el vehículo.
2.2.1 GPS VBOX III.
El GPS VBOX III es un instrumento que permite medir de manera rápida y efectiva
diferentes variables de interés al momento de la caracterización vehicular. Las
principales son la posición, velocidad y aceleración en función del tiempo, sin
embargo el dispositivo cuenta con muchas otras variables de medición. El sistema
se basa en el uso de dos sistemas de navegación, el primero es el sistema
norteamericano GPS (Global Position Sistem) el cual cuenta con 24 satélites
alrededor del globo, el segundo es el sistema GLONASS, el cual fue desarrollado
por la antigua unión soviética, el cual cuenta con 29 satélites alrededor del globo.
El dispositivo permite triangular el vehículo por medio de los satélites, permitiendo
así medir las variables antes mencionadas, las cuales son adquiridas por
dispositivo en una tarjeta de almacenamiento (Race-Tools, 2014) .
Ilustración 4.GPS VBOX III racelogic.

15
2.2.2 GPS VBOX Sport.
El GPS VBOX Sport es un instrumento que permite medir de manera rápida y
efectiva diferentes variables de interés al momento de la caracterización vehicular.
Las variables principales son la posición, velocidad y aceleración en función del
tiempo. El sistema se basa en el uso del sistema de navegación norteamericano
GPS (Global Position Sistem) el cual cuenta con 24 satélites alrededor del globo.
El dispositivo permite triangular el vehículo por medio de los satélites, permitiendo
así medir las variables antes mencionadas, las cuales son adquiridas por
dispositivo en una tarjeta de almacenamiento tipo SD. El dispositivo cuenta con
una batería interna de entre seis y ocho horas de duración con un peso de 200g.
(Race-Tools, 2014)
Ilustración 5. GPS VBOX Sport racelogic.
2.3 Modelo energético.
El modelo energético es necesario para calcular la energía regenerada por el
vehículo en operación, este modelo fue extraído del trabajo “Estimación del
consumo energético de vehículos eléctricos basada en mediciones cinemáticas”.
En el mencionado trabajo se propone un modelo de dinámica longitudinal, que
permite estimar los requerimientos energéticos del vehículo bajo las condiciones
topográficas y de tránsito de la ciudad de Bogotá.
Este modelo fue desarrollado por estudiantes de la universidad con el fin de
evaluar energéticamente un vehículo eléctrico, en el caso del presente proyecto
será utilizado como soporte para los cálculos de energía, de la misma manera el
modelo analiza integralmente el vehículo, teniendo en cuenta cada una de las
energías involucradas en un movimiento por la ciudad.
Del mismo modo, estas energías serán llamadas de ahora en adelante las
variables energéticas de la distribución, estas son obtenidas mediante cálculos de

16
acuerdo a la medición de las variables cinemáticas del vehículo con los
instrumentos anteriormente mencionados.
Por otro lado, será explicado en la sección de metodología en conjunto con el
procesamiento de datos.
2.4 Selección de sector y circuito.
Como se mencionó en la sección 1, el sector elegido para la realización del
proyecto es la zona de ciudad salitre porque en esta convergen diferentes factores
que influyen directamente en el procedimiento experimental. La zona fue abordada
mediante dos variables esenciales del proyecto, distancia y tiempo. Se diseñó un
circuito replicable que cumpliera las siguientes condiciones: Reflejar de manera
adecuada los requerimientos del conductor de taxi, aproximación a una distancia
fácilmente cuantificable en la cual no fuera necesario realizar recargas de energía
(50km), disminuir al mínimo las interferencias de señal con el GPS como edificios
y árboles, y por último que el recorrido total no tomara más de 120 min dadas las
limitaciones de batería del sistema de adquisición de datos.
2.5 División del recorrido en microciclos.
Con el fin de realizar un análisis del circuito y sus tramos correspondientes, se realiza la implementación parcial de la “Metodología para el desarrollo piloto del ciclo de conducción para Bogotá, Colombia.” (Bermudez, 2011). Esta metodología permite analizar recorridos urbanos como el presente, la metodología está diseñada para crear un ciclo de conducción urbano, puesto que este no es el objetivo del proyecto, se toman como referencia los pasos intermedios usados por el autor para llegar a este ciclo pues en su análisis incluye el procesamiento de secuencias de velocidad contra tiempo que es la base para realizar el análisis energético propuesto. En este se definen las variables principales que afectan los microciclos, las cuales serán analizadas en la sección de metodología e integradas con el análisis en conjunto. Estas variables son, los cuatro momentos estadísticos de la distribución de velocidades, es decir, velocidad promedio, varianza, oblicuidad y coeficiente de kurtosis.
2.7 Análisis de circuito y de pruebas en conjunto.
Teniendo en cuenta las variables anteriores, se procede a analizar los microciclos
de manera conjunta y no separadamente, esto con el fin de analizar
estadísticamente los tramos del circuito y posteriormente el circuito completo. Este
análisis estadístico pretende confrontar las variables estadísticas con las

17
energéticas, de este modo se puede obtener información concluyente sobre el
comportamiento cinemático del vehículo y como este influye sobre su consumo
energético a lo largo de recorridos urbanos.
En este análisis de circuito, también se cuantifica la influencia del número de
microciclos en un recorrido y como estos afectan energéticamente el vehículo en
cuanto a regeneración de energía se refiere.
2.8 Vehículo de pruebas BYD e6.
El vehículo de tipo SUV (por sus siglas en inglés) utilizado a lo largo del proyecto
está equipado con un motor eléctrico de imanes permanentes, baterías de fosfato
de hierro manufacturado y diseñado 100% en fabricación china e importado al país
por Praco Didacol con el fin de utilizarse como taxi para transporte púbico. A
continuación una ilustración del mismo y sus principales características.
Ilustración 6. Vehículo eléctrico utilizado.
Masa (kg) 2380
Ancho (m) 1.822
Altura (m) 1.633
Pmax (kW) 90
Masa Adicional (2 Pasajeros) (kg) 150
Área frontal (m^2) 1.633
Capacidad de la batería ( ) (J) 221040
Velocidad mínima de regeneración(km/h)*
24
Eficiencia tren de potencia * 68%
Eficiencia de regeneración * 80%
Coeficiente de arrastre
aerodinámico *
0.5421
Coeficiente de rodadura * 0.0101
Tabla 1.Características Principales del vehículo de pruebas.

18
*Estos valores constantes fueron obtenidos de (Muñoz-Rincón-Roa-Sierra, 2015)
3. Objetivos.
3.1 Objetivo general
Desarrollo de una metodología para el cálculo de la energía a partir de
mediciones cinemáticas de un vehículo eléctrico, con énfasis en la energía
proporcionada por el freno regenerativo en la en la zona de Ciudad Salitre de la
ciudad de Bogotá, para a futuro determinar cómo operar de manera
energéticamente eficiente el vehículo.
3.2 Objetivos específicos.
- Seleccionar los métodos, instrumentos y condiciones de medición del
experimento para la adecuada instrumentación del vehículo.
- Definir una metodología para la calibración de los instrumentos con el fin de
garantizar resultados experimentales confiables.
- Adquisición de información suficiente para desarrollar un análisis ingenieril
adecuado y estadísticamente confiable basados en un modelo previamente
propuesto.
- Analizar y presentar los datos obtenidos para la posterior comparación con los
datos de regeneración obtenidos en el vehículo.
4. Metodología.
La metodología para desarrollar el proyecto consistió en: El diseño experimental
para medir variables de interés de manera óptima, la selección de los instrumentos
a utilizar teniendo en cuenta las condiciones de operación, la repetitividad de las
pruebas bajo condiciones comparables entre ellas, la ejecución de pruebas
preliminares y definitivas, el análisis de los datos obtenidos en las pruebas.

19
4.3 Metodología para procesamiento de datos.
Teniendo los resultados de las pruebas mencionadas se debe implementar el
modelo energético mencionado en la sección 2.3, obteniendo entonces la energía
regenerada por el vehículo durante su operación en las condiciones expuestas
anteriormente.
Para llevar a cabo el procesamiento de datos se debió utiliza una serie de pasos
los cuales involucraron un procesamiento de los datos en dos programas
diferentes, uno para seguir la metodología mencionada en la sección 2.5 (Vbox
Tools) con el fin de obtener los microciclos y otro (Matlab) que utiliza los datos
obtenidos de Vbox Tools para obtener los datos de regeneración el cual combina
la sección 2.6 con la sección 2.3.
Durante el procesamiento de datos, se hace necesario realizar un filtrado de dos
señales esenciales para el cálculo energético, la distribución de velocidades
dentro de los microciclos y la aceleración correspondiente a esta . El filtro
utilizado fue un “savitzky golay” (MathWorks., 2015) el cual permite suavizar las
distribuciones obtenidas pues estas tienen perturbaciones externas como fue
mencionado en la sección 4.1.
4.3.1 Obtención de microciclos con el programa Vbox Tools.
Este programa permite procesar los datos obtenidos con el Vbox Sport, los cuales
están en un archivo compatible con el mismo, el programa permite generar cortes
sobre los perfiles de velocidad de los tramos del circuito, dichos cortes serán los
microciclos que posteriormente serán analizados. Del mismo modo, el programa
permite generar una gráfica con las variables de interés para el procesamiento
posterior en Matlab que permita obtener los resultados de consumo y
regeneración energética durante el microciclo. Se hace necesario crear un archivo
al cual Matlab pueda acceder, por lo cual se exportan las variables necesarias a
Excel para que desde allí se pueda lograr importación de datos a Matlab. Las
variables nombradas acá son presentadas en la siguiente tabla con su respectivo
propósito:
Variable Propósito
Tiempo Cálculos energéticos.
Distancia Comparación con odómetro
Velocidad Uso estadístico y cálculos energéticos.
Aceleración Cálculos energéticos.
Latitud Perfil de altura
Longitud Perfil de altura Tabla 2. Variables obtenidas de Vbox Tools.

20
Las variables mencionadas en la tabla 4 son las necesarias para lograr implementar el modelo energético y el posterior análisis estadístico. El tiempo, distancia, velocidad y aceleración son esenciales dado que permiten saber la interacción del vehículo con la carretera, del mismo modo son las variables cinemáticas con las cuales se calculará el gasto energético del vehículo. Por otro lado, las variables de latitud y longitud son necesarias para el análisis pues a partir de ellas se calcula el perfil de alturas asociado al recorrido del tramo del circuito, este procedimiento de obtención del perfil y su incidencia en la cinemática del vehículo será explicada más adelante en conjunto con el modelo. Se implementó la división de cada tramo en microciclos, entendiéndose estos como la unidad básica para el estudio del tránsito de la ciudad, por tanto un recorrido está compuesto por una serie de microciclos concatenados como se muestra en la gráfica 1.
Grafica 1. División de un tramo del circuito en microciclos.
Teniendo en cuenta lo anterior se puede obtener un microciclo individual para su posterior análisis como se muestra en la gráfica 2.
Grafica 2. Microciclo individual.
4.3.2 Obtención de variables energéticas y estadísticas.
Con las variables cinemáticas implementó un código en Matlab que utiliza el
modelo mencionado sección 2.3 para calcular de manera independiente cada una
de las variables energéticas y estadísticas. Este modelo nace a partir del análisis
de la dinámica longitudinal del vehículo y se explica a continuación.
Km
/h
seg

21
Ilustración 7. Fuerzas de interacción en el modelo de dinámica longitudinal.
En la ilustración 6, se observan las fuerzas que interactúan en el vehículo en
movimiento, son identificables las siguientes fuerzas resistivas: que es la
fuerza de resistencia aerodinámica, que hace referencia a la fuerza de
resistencia a la rodadura, que hace referencia a la fuerza del peso del vehículo,
esta última se debe tener en cuenta debido al gasto energético que se produce al
recorrer una vía con pendiente. Si se agrupan los términos en una ecuación
obtenemos lo siguiente:
*Las fuerzas de rodadura, aerodinámica y gravitacional serán definidas en los anexos, del mismo modo la masa equivalente M.
En la ecuación (1) se definen dos variables más la que corresponde a la
fuerza de interacción entre el vehículo y la carretera, por otro lado se define
la
cual es la fuerza resultante entre la interacción de la aceleración longitudinal del
vehículo y la masa equivalente del mismo. A partir de la ecuación 1 se puede
llegar a obtener el consumo energético del vehículo de la siguiente manera:
La ecuación (2) muestra la potencia de interacción como la resultante entre la
suma de las potencias asociadas al movimiento natural del vehículo. Además, la
potencia de interacción puede ser positiva o negativa, esta división en dos
escenarios permite estudiar de manera separada el consumo y frenado del

22
vehículo cuando corresponde al escenario de consumo y para una
corresponde a un escenario de frenado. Cabe destacar que la división
de los escenarios no puede estar asociada a la dirección del vector de aceleración
ya que, por ejemplo, el vehículo no necesariamente está en condición de frenado
cuando hay una aceleración negativa (dado el efecto combinado de las fuerzas).
Como se menciona anteriormente se dividió el modelo en dos escenarios para
estudiarlos de manera separada. En las ecuaciones 3 y 4 se muestra la división de
estos dos escenarios de manera explícita:
{
(
)
{
(
)
La ecuación (3) muestra el escenario de tracción en donde la potencia de
interacción se expresa como el producto de una potencia de tracción y la
eficiencia del tren de potencia (asumida constante). El consumo energético del
vehículo está directamente asociado a este caso.
La ecuación (4) muestra el escenario de frenado. La potencia de frenado
corresponde al escenario donde la potencia de interacción posee valores
negativos.
Por último, la energía consumida para ambos escenarios puede expresarse como
la integral de la potencia de interacción a lo largo del recorrido analizado. La
energía consumida en tracción puede calcularse de acuerdo a la ecuación y la
energía de frenado puede calcularse de acuerdo a la ecuación (Muñoz-Rincón-
Roa-Sierra, 2015)
∫
∫
Partiendo de la potencia de frenado descrita anteriormente anterior se puede
obtener el cálculo del frenado regenerativo. El valor total de la potencia de frenado

23
corresponde a la suma de la potencia regenerada y disipada. Para lograr calcular
este valor de potencia es necesario tener en cuenta ciertas variables inherentes al
vehículo, como la velocidad del mismo (teniendo en cuenta que el frenado
regenerativo se desactiva cuando esta es menor a una velocidad dada) y la
potencia máxima de generación del motor eléctrico. Las dos variables anteriores
no son las únicas que influyen en la regeneración energética del vehículo, sin
embargo serán las que se tendrán en cuenta en el presente trabajo, las variables
adicionales que son el par y potencia máximos del motor eléctrico, la potencia
máxima de carga y el voltaje inducido a las baterías, se condensarán en un
término de eficiencia global del sistema de regeneración (constante) que
permite cuantificar el flujo energético hasta el sistema de almacenamiento.
(Muñoz-Rincón-Roa-Sierra, 2015)
Lo anterior se expresa en la siguiente ecuación.
{
A partir de esta ecuación es posible calcular la energía de frenado regenerativo de
la siguiente manera:
∫
Por otro lado se debe tener en cuenta lo mencionado en la ecuación (1) donde se
el término de la fuerza gravitacional asociada al recorrido de una vía con
pendiente afecta la dinámica longitudinal del vehículo, por lo tanto se hace
necesario estimar un perfil de elevación del recorrido, este perfil puede ser
extraído de la medición de altitud del GPS, sin embargo estos resultados son
imprecisos pues no fueron diseñados con este fin. El dispositivo seleccionado sin
embargo tiene la capacidad de medir las coordenadas en cada punto de registro
de datos (Latitud y longitud) por lo cual se utilizaran estos datos para extraer el
perfil de elevación.
Para la ciudad de Bogotá existe la Infraestructura de Datos Espaciales para el
Distrito Capital – IDECA – que contiene, entre otra información, curvas de nivel de
elevación (UAECD - IDECA, 2012). La información geográfica de elevación
corresponde a las coordenadas geográficas (Longitud, Latitud) de diversos puntos
que conforman curvas de nivel con una elevación asociada. Usando esta
información es posible interpolar la elevación de un recorrido con base en la
ubicación reportada por el sistema GPS en cada instante de tiempo. Se usa una
interpolación lineal basada en datos dispersos (coordenadas de curvas de nivel
con puntos no distribuidos de manera uniforme). Usando esta información, se

24
propone extraer el perfil de elevación de sistemas de información geográfica y
mejorar la estimación de altura para los recorridos realizados. Una vez que se
tiene el perfil de elevación a partir de la interpolación propuesta, es necesario
suavizarlo para calcular la pendiente en cada instante de tiempo. (Muñoz-Rincón-
Roa-Sierra, 2015)
Como se mencionó anteriormente, el perfil de alturas fue obtenido usando una
interpolación entre las curvas de nivel partiendo de los datos de latitud y longitud.
Dicha interpolación fue realizada para cada uno de los microciclos, el código
implementado en Matlab fue el mismo que se usó en el trabajo ya antes citado
(Muñoz-Rincón-Roa-Sierra, 2015). El código genera un punto de altura por cada
punto de medición, la altura es expresada en metros sobre el nivel del mar estos
puntos también son almacenados en el archivo de Excel junto con las variables de
la tabla 4.
Teniendo en cuenta lo anterior se debe tener presente que lo requerido para
introducir en el modelo energético es la variación de la pendiente punto a punto,
es decir el ángulo de inclinación que se observa en la ilustración 6. Este ángulo de
inclinación se obtiene de la siguiente manera:
(
)
Donde es la altura instantánea en el punto, es la distancia recorrida hasta
ese punto, y las variables con sub-índices son los puntos de altura y
distancia inmediatamente anteriores.
Basados en los microciclos que se obtienen del literal anterior y utilizando las
formulas del modelo, se analiza energéticamente cada microciclo por separado.
En este punto se definen las variables que se deben obtener de acuerdo a su
relevancia para el proyecto.
Estas variables están divididas en dos, las primeras son variables estadísticas
inherentes al microciclo, es decir las que pueden ser obtenidas directamente de
los datos y que definen la forma e incidencia en la regeneración de energía de los
microciclos, estas variables son los cuatro momentos del microciclo obtenidos a
partir de la distribución de velocidad. Por otro lado se tienen las variables
energéticas que son las energías involucradas en el movimiento del vehículo,
estas variables son encontradas utilizando el modelo energético implementado en
el software Matlab. En la tabla a continuación se nombraran las variables
estadísticas y energéticas.

25
Variables Estadísticas Variables Energéticas.
Velocidad Promedio
[m/s] Energía consumida Econs[J]
Varianza Energía regenerada Ereg[J]
Oblicuidad Estado de la batería sin regeneración
SOC[%]
Coeficiente de kurtosis
Estado de la batería con regeneración
SOCR[%]
Tabla 3.Variables relevantes en el proyecto.
Para entender el comportamiento de las variables estadísticas, se debe tener en
cuenta que estas representan la forma de la distribución de la velocidad , las
ecuaciones utilizadas para calcular estos valores son las siguientes:
∫
∫
∫ ( )
∫ ( )
∫ ( )
Por otro lado las variables energéticas de energía consumida y energía
regenerada son calculadas con las ecuaciones (5) y (8), mientras que las del
estado de la batería son calculadas de la siguiente manera:
Donde es la capacidad de la bacteria en Joules.
Las variables estadísticas como fue dicho anteriormente caracterizan la forma de
la distribución de velocidades. Esta sección ilustra cómo es dicha influencia
dependiendo de la variable.
El primer momento que es definido como permite establecer el punto medio
de la distribución, el segundo momento que es la varianza permite cuantificar la

26
dispersión de la distribución es decir que tan ancha o angosta es, el tercer
momento que es la oblicuidad cuantifica que tan asimétrica es la distribución,
por último el coeficiente de kurtosis cuantifica la forma de la distribución. Lo
anteriormente dicho se representa gráficamente de la siguiente manera:
Ilustración 8. Relación de Vprom, y Kts con la distribución.
Ilustración 9. Relación Sks con la distribución.
Las variables de orden inferior, es decir la y tienen magnitudes no
centradas en es decir, que sus valores no están alrededor de 0, del mismo modo, nunca serán negativos y su interpretación será explicada más adelante. Por otro
lado, las variables de orden superior la y están centrados en cero y sus valores pueden sr tanto positivos como negativos, la importancia de estas variables se ejemplifica en las ilustraciones 10 y 11. A partir de éstas es posible
inferir acerca del comportamiento de un micro ciclo: positiva y un alto valor de
son indicativos de altas tasas de aceleración y bajo tiempo en este régimen, indicando altas tasas de consumo de energía. Así mismo un negativo y alto valor de implican altas tasas de desaceleración; indicativos de desgaste vehicular (Bermudez, 2011).
Ilustración 10. Relación de la oblicuidad y la forma de la distribución.
Ilustración 11. Relación del coeficiente de kurtosis y la forma de la distribución.
Definidas las variables anteriores, se procede a analizar los microciclos de manera
conjunta y no separadamente, esto con el fin de analizar estadísticamente los

27
tramos del circuito y posteriormente el circuito completo. Este análisis estadístico
pretende confrontar las variables estadísticas con las energéticas, de este modo
se puede obtener información concluyente sobre el comportamiento cinemático del
vehículo y como este influye sobre su consumo energético a lo largo de recorridos
urbanos.
En este análisis de circuito, también se cuantifica la influencia del número de
microciclos en un recorrido y como estos afectan energéticamente el vehículo en
cuanto a regeneración de energía se refiere.
4.3.3 Filtro Savitzky golay.
El método de filtro Savitzky-Golay realiza esencialmente una regresión polinómica
local para determinar el valor suavizado para cada punto de datos. Este método es
adecuado para realizar el filtrado de los datos pues tiende a preservar las
características de los datos, tales como la altura del pico y la anchura, que están
por lo general se pierden con otros métodos de filtrado. Para utilizar de manera
adecuada el filtro, se debe definir el grado del polinomio con el cual se realizará la
regresión local, del mismo modo es necesario definir una ventana de puntos impar
que centra sobre cada punto el cálculo suavizado.
Para el desarrollo del proyecto se definió utilizar un polinomio de grado 1 con una
ventana de 61 puntos, dado que se está muestreando a 20Hz por lo cual se
obtendrá el cálculo suavizado de los puntos a 1.5 segundos alrededor de cada
uno, esto es suficiente para la señal de velocidad y aceleración, dado que las
caídas de señal no superan esta ventana de puntos. Además con grado mínimo
de polinomio se garantiza una mínima alteración de la distribución filtrada,
manteniendo las características de la misma.
4.4 Comparación de resultados con los datos obtenidos del vehículo.
Por último se realiza una comparación de resultados entre los obtenidos en la
sección 4.3.4 y las medidas de abordo mencionadas en la sección 4.1. Estas
serán comparadas cuantitativamente lo que permite concluir si el modelo
energético es correcto y a su vez darle veracidad a los datos de energía
regenerada obtenida bajo la metodología.
Teniendo en cuenta lo anterior, se añade una variable para la comparación de los
mismos y es la energía consumida por kilómetro recorrido, esta se calcula de la
siguiente manera.
28
Donde es la energía consumida medida por el vehículo, es la
distancia final recorrida en el circuito medida en el odómetro del vehículo. Por su
parte es la energía calculada por el modelo y es la distancia medida
por el Vbox Sport.
Durante estas pruebas se registró el consumo del vehículo expresado en puntos
porcentuales de su caída de batería, de la misma manera se registró la distancia
recorrida en km por medio de su odómetro de abordo
5. Toma de datos experimentales.
5.1 Diseño experimental.
En primera medida se debe tener en cuenta que se debe realizar una verificación
de la calibración de los instrumentos dado que se debe poseer una
instrumentación confiable en términos de precisión y exactitud. De la misma
manera se debe tener en cuenta que se poseen dos posibilidades para medir las
variables de interés para el proyecto se deben tener en cuenta sus ventajas y
desventajas comparativamente, esto se presenta en la siguiente tabla.
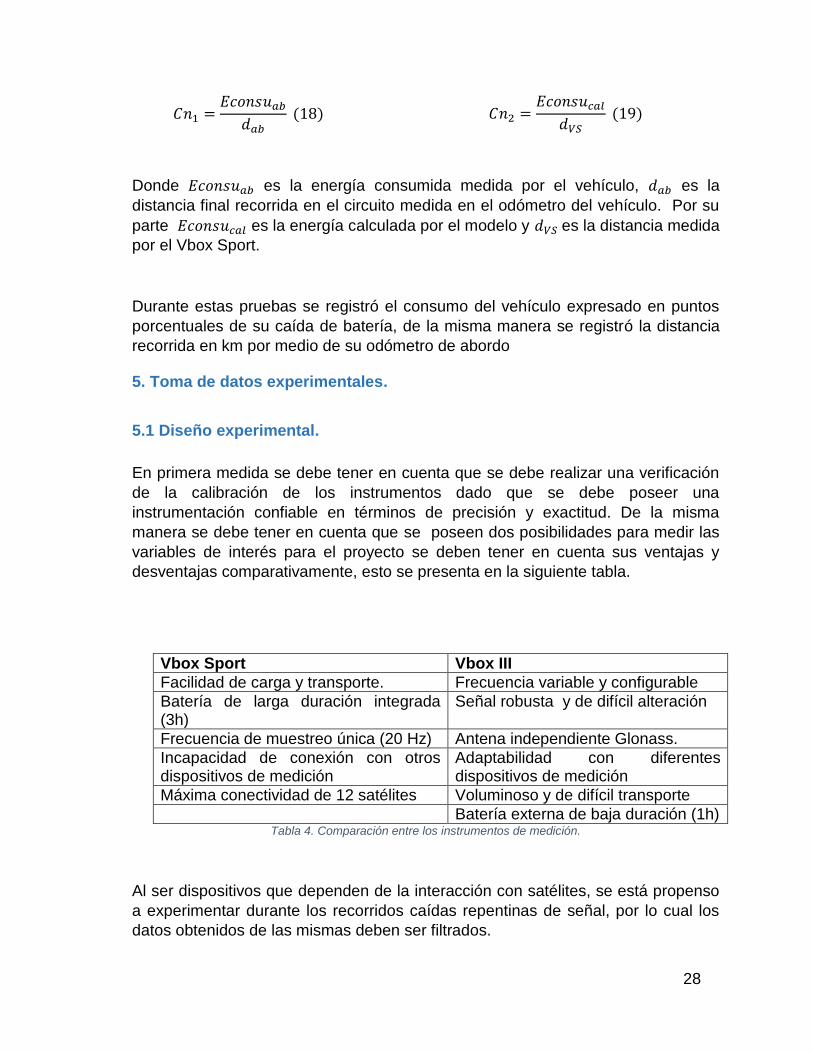
Vbox Sport Vbox III
Facilidad de carga y transporte. Frecuencia variable y configurable
Batería de larga duración integrada (3h)
Señal robusta y de difícil alteración
Frecuencia de muestreo única (20 Hz) Antena independiente Glonass.
Incapacidad de conexión con otros dispositivos de medición
Adaptabilidad con diferentes dispositivos de medición
Máxima conectividad de 12 satélites Voluminoso y de difícil transporte
Batería externa de baja duración (1h) Tabla 4. Comparación entre los instrumentos de medición.
Al ser dispositivos que dependen de la interacción con satélites, se está propenso
a experimentar durante los recorridos caídas repentinas de señal, por lo cual los
datos obtenidos de las mismas deben ser filtrados.

29
De acuerdo con la tabla 2 el Vbox III es mejor instrumento de medida que el Vbox
Sport, sin embargo, sus desventajas para transporte y autonomía de carga
generan que se escoja el Vbox Sport como instrumento para realizar el proyecto.
Principalmente por la necesidad de en algún momento conectar el Vbox III al
vehículo, lo cual genera una alteración al estado de carga de la batería, generando
una variable adicional que se debe medir y es el consumo de energía por parte de
este al vehículo y sin saber qué repercusiones tenga este en la regeneración de
energía.
Teniendo lo anterior en cuenta se procede entonces a realizar una verificación de
la calibración, con el fin de comparar de forma tangible que tan preciso es el Vbox
Sport en comparación con el Vbox III tomando este como medida de referencia
dadas sus mejores especificaciones. Esta verificación será explicada en la
sección de resultados, así como sus consecuencias sobre los datos obtenidos.
Por otro lado debido a la ausencia de trabajos sobre vehículos eléctricos operando
en las condiciones viales de Bogotá, se diseñó un circuito con 8 tramos que puede
ser observado a continuación:
Ilustración 10.Circuito diseñado para la toma de datos.
En la ilustración 7 se observa el circuito con los puntos blancos como referencia
entre tramos y a continuación se muestra la tabla con el consolidado de distancias
y tiempos estimados por medio de Google Maps®.

30
Tabla 5. Tramos del circuito, distancia y tiempo estimado.
Sin embargo el circuito genera desventajas como no poder garantizar un
escenario totalmente repetitivo para una comparación estricta. En primer lugar por
la condición de tráfico variable entre pruebas y en segundo lugar por la
variabilidad atmosférica que genera una diferencia en las condiciones de
operación de la maquinaria del vehículo.
5.2 Toma de datos experimental.
Como se mencionó en la sección anterior en primera medida se debe realizar una
verificación de la calibración de los instrumentos para esto se diseñan dos pruebas
independientes, una para medir la distancia y otra para medir la velocidad,
posteriormente para confirmar la repetividad y la viabilidad de los experimentos se
realizaron 2 pruebas preliminares, las cuales consistieron en corroborar los datos
de tiempo y distancia mostrados en la Tabla 3. Para estos experimentos, se
instrumentó con el VBOX sport, un vehículo de combustión interna y se procedió a
realizar el circuito propuesto.
De acuerdo a esto y con el fin de realizar la toma de datos de la forma más
idónea, se deciden realizar cuatro pruebas con el vehículo eléctrico, dos en horas
de la mañana y las otras dos en la tarde evaluando así las condiciones viales en
las horas pico de mañana y tarde, para observar en estos casos el
comportamiento energético del vehículo. Durante estas pruebas se registró el
consumo del vehículo expresado en puntos porcentuales de su caída de batería,
de la misma manera se registró la distancia recorrida en km por medio de su
odómetro de abordo.
Inicio Fin Distancia Aprox (km) Tiempo estimado min
Cra.68A#23-47 Aeropuerto 8.10 13.0
Aeropuerto Calle.22D#85-65 6.00 13.0
Calle.22D#85-65 Marriot 3.10 8.0
Marriot Cra 97 5.40 15.0
Cra 97 Fiscalia 7.80 15.0
Fiscalia Marriot 3.60 10.0
Marriot Aeropuerto 6.20 11.0
Aeropuerto Cra 64 8.20 27.0
Suma 48.4 112
Tramos de circuito

31
Estas pruebas fueron realizadas mediante el contacto con un propietario de un
vehículo, que estuvo dispuesto a colaborar con el proyecto y cuyo trabajo fue
remunerado.
5.2.1 Prueba de distancia.
La prueba de distancia consiste en recorrer una distancia de 50m por diez
repeticiones en una calle cerrada y este procedimiento realizarlo dos veces, con el
fin de realizar comparaciones entre los dos instrumentos de medida, se
instrumenta un vehículo de pasajeros de combustión interna pues no tiene
influencia si es o no eléctrico. Esto se ilustra a continuación.
Ilustración 11. Antenas de VBOX III y VBOX Sport
Ilustración 12. VBOX III dentro del vehículo.
Ilustración 13. VBOX Sport dentro del vehículo.
Del mismo modo fue necesario adecuar un espacio con la medida de 50m y por
donde no se tuvieran interrupciones largas, es por esto que se escogió una calle
de ciudad salitre Este espacio es el siguiente.
32
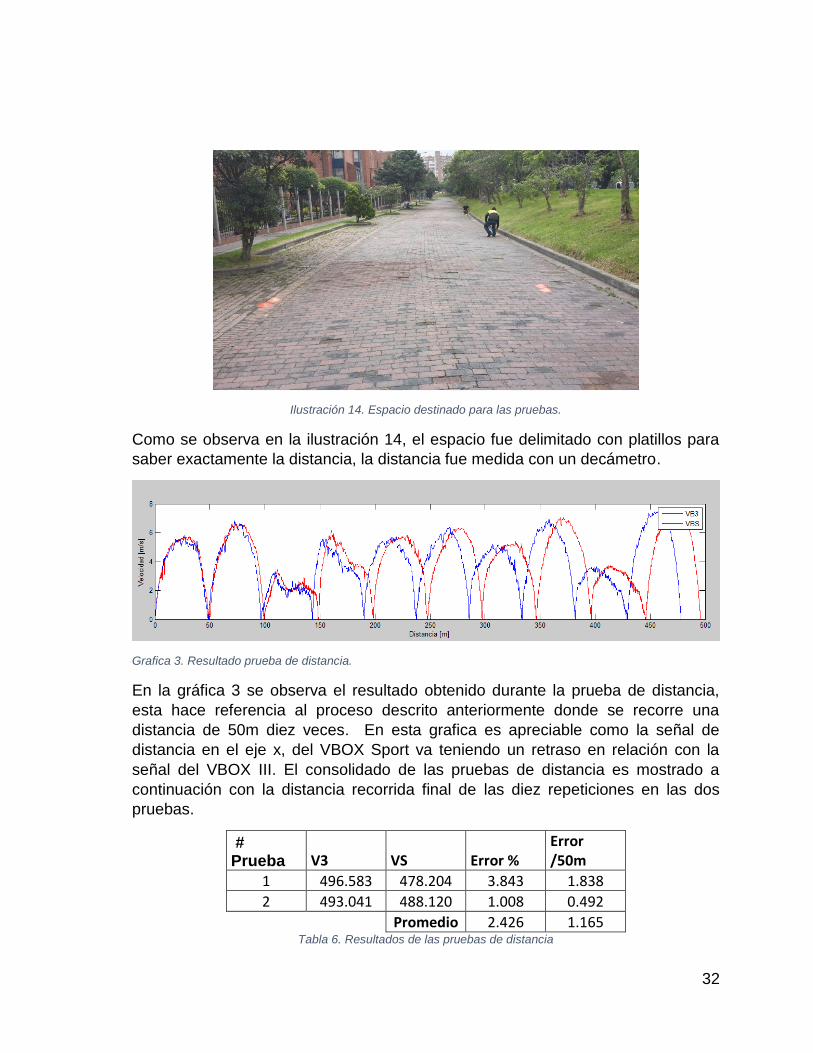
Ilustración 14. Espacio destinado para las pruebas.
Como se observa en la ilustración 14, el espacio fue delimitado con platillos para
saber exactamente la distancia, la distancia fue medida con un decámetro.
Grafica 3. Resultado prueba de distancia.
En la gráfica 3 se observa el resultado obtenido durante la prueba de distancia,
esta hace referencia al proceso descrito anteriormente donde se recorre una
distancia de 50m diez veces. En esta grafica es apreciable como la señal de
distancia en el eje x, del VBOX Sport va teniendo un retraso en relación con la
señal del VBOX III. El consolidado de las pruebas de distancia es mostrado a
continuación con la distancia recorrida final de las diez repeticiones en las dos
pruebas.
# Prueba V3 VS Error %
Error /50m
1 496.583 478.204 3.843 1.838
2 493.041 488.120 1.008 0.492
Promedio 2.426 1.165 Tabla 6. Resultados de las pruebas de distancia

33
De la tabla 6 hace evidente lo observado en la gráfica 3, donde el VBOX Sport
presenta un desfase en relación al patrón que en este caso es el VBOX III. Sin
embargo, este desfase es corregido en el momento de aplicar el filtro propuesto
en la sección 4.3.3 dado que el este permite la eliminación del ruido de la señal de
velocidad especialmente cuando se tiene valores muy próximos a cero, del mismo
modo, al utilizar el filtro con la ventana de 61 puntos, se logra minimizar el efecto
de la caída de la señal, generando un promedio en las velocidades donde la señal
presenta las ya mencionadas caídas. Por lo explicado anteriormente, el desfase
de la señal una vez procesados los datos no tiene una influencia considerable en
el cálculo energético.
5.2.2 Prueba de Velocidad.
Para la prueba de velocidad se utiliza la misma distancia de 50m con la diferencia
que se pasa por esta a una velocidad constante, se realizaron muestras a 2
velocidades diferentes y con cada una se realizaron 10 repeticiones, para un total
de 20 repeticiones. Las velocidades escogidas fueron de 20km/h y 30km/h. La
instrumentación se realizó de la misma manera que en la prueba de distancia. A
continuación se presenta una muestra a 20km/h que permite observar las
diferencias de medición entre el VBOX III y el VBOX Sport.
Grafica 4. Resultado prueba de velocidad. (Velocidad analizada entre líneas rojas)

34
La grafica 4 permite ver la diferencia entre los perfiles de velocidad de los
instrumentos de medición, para analizar esta gráfica, es imprescindible tener en
cuenta que este solo se debe centrar en los datos intermedios cuando la velocidad
se mantenga lo más constante posible por lo cual de la gráfica 4 se analizan los
datos entre las líneas rojas.
Basados en esto de las 10 muestras para cada velocidad escogida se obtuvo el
promedio de velocidad, se compararon entre ellas teniendo como patrón
nuevamente el VBOX III. A continuación se muestra el consolidado de estos
datos.
# de Prueba Vbox III (km/h)
Vbox Sport km/h) Error%
1 20.091 19.994 0.485
2 29.838 29.872 0.112 Tabla 7.Resultados pruebas de velocidad.
Como lo corrobora la tabla 7, la diferencia entre ambas medidas es mínima y es
esta variable la más crítica en cuanto a sensibilidad del modelo, dado que todos
los cálculos de energía parten de estas distribuciones de velocidad.
Lo anterior sumado al resultado ya presentado de la prueba de distancia permite
concluir que el Vbox Sport es el instrumento adecuado para la realización de las
pruebas en el circuito. Por esta razón se prosigue con las pruebas preliminares de
medición instrumentando únicamente el Vbox Sport.
5.3 Toma de datos experimental.
En la presente sección se muestra el proceso de toma de datos tanto preliminares
como definitivos.
5.3.1 Pruebas preliminares en el circuito. Teniendo en cuenta lo anterior se procede a realizar las pruebas preliminares para
confirmar los datos obtenidos por google maps de distancia entre tramos del
circuito. Teniendo en cuenta la elección de horarios de las pruebas, se realizó una
prueba en las horas de la mañana y otra en las horas de la tarde. Los resultados
de estas pruebas se muestran en la sección de anexos.
Con los resultados obtenidos es posible analizar que el circuito fue diseñado de
manera adecuada, cumpliendo los requerimientos de no sobrepasar las dos horas

35
de recorrido y una distancia cercana a 50km. Del mismo modo, el instrumento de
medición corroboró su precisión si se compara con Google Maps, estas
mediciones serán verificadas igualmente en cada prueba con el vehículo eléctrico.
Por otro lado en anexos se presenta una tabla donde se presentan los errores
porcentuales tomando como medida base las distancias y tiempos de Google
Maps.
Las medidas de tiempo y distancia de cada tramo del circuito, son las calculadas
con el promedio de las dos pruebas estas se comparan con las medidas base.
Por último, se realiza el promedio de los errores porcentuales para obtener el error
total. Se observa que hay una desviación en la medida del tiempo considerable,
sin embargo esta variable depende de las diferentes condiciones vehiculares de la
ciudad por lo cual no se puede controlar, además un el error de 14.02 %
representa un error de ±8min que en caso de ser positivo no superara el límite
máximo de 120 min propuesto en la metodología. Del mismo modo se observa
que el error en la medida de distancia es de 2.50% lo cual representa una
desviación en el circuito completo de ±1.2km que afecta la medida energética si se
trabajara el circuito completo, esta desviación como se mencionó se debe a la
caída de señal durante el recorrido sin embargo con la división en microciclos y el
filtrado de la señal de datos, este error se divide en la misma cantidad de
microciclos corregidos por lo que al final se logra corregir con la metodología.
5.3.2 Toma de datos experimentales.
Continuando con la metodología, realizaron 4 tomas de datos experimentales, dos
en la hora pico de la mañana y dos en la tarde, para esto se instrumentó el
vehículo eléctrico con el Vbox Sport.
Ilustración 15. Vbox Sport en el vehículo eléctrico.
Ilustración 16. Antena Vbox Sport en vehículo eléctrico.

36
Durante la toma de datos experimentales, además de los datos adquiridos por el
Vbox Sport, se registraron las medidas de a bordo del vehículo, estas mediciones
son presentadas en anexos.
Los resultados consolidados de cada prueba en su respectivo tramo del circuito. El
consumo fue calculado de la siguiente manera:
Donde es el estado de carga de la batería en el tablero de instrumentos al
inicio del tramo, y es el estado de carga al final del tramo. Del mismo modo se
obtiene la distancia.
Donde es la medida del odómetro al final del tramo y la medida del
odómetro al inicio del tramo.
5.3 Procesamiento de datos.
5.3.1 Obtención de microciclos con el programa Vbox Tools.
El programa Vbox Tools permite procesar los datos obtenidos con el instrumento
de medida. Este fue operado durante la toma de datos experimental de forma tal
que se obtuvo un archivo por cada tramo de circuito. Como se mencionó
anteriormente el programa permite cortar los perfiles de velocidad y exportarlos a
Excel con las variables de la tabla 4. Este procedimiento parte de la gráfica de
velocidad vs tiempo del tramo completo como se muestra a continuación:
Grafica 5. Velocidad vs tiempo tramo de circuito con elementos para realizar el corte.

37
El cursor que permite señalar en que parte del recorrido se debe realizar el corte,
se posiciona el mismo en el siguiente cero de la función y se procede a cortar
usando la herramienta de modificación de gráficos también señalada en la gráfica
5.
Una vez cortada se obtiene un microciclo como el mostrado a continuación:
Grafica 6. Microciclo.
Grafica 7. Selección de variables de interés.
Con las variables de interés seleccionadas se procede a exportar los datos a
Excel, estos serán exportados con la herramienta propia del programa que es
visible en la gráfica 5. Para mantener un orden cronológico de los microciclos al
momento de ser exportados serán guardados en un archivo de Excel donde se

38
separe por páginas cada microciclo y sea llamada esta m1 para el microciclo 1. De
la misma manera serán separados entre tramos del circuito y pruebas realizadas.
5.3.2 Resultados del perfil de altura.
Una vez obtenido todos los microciclos se debe calcular el perfil de altura de cada
uno de ellos, se obtienen las alturas de acuerdo a lo explicado en la sección 5.3.2,
un resultado típico de este perfil junto con el resultado de inclinación calculada
como serán mostrados a continuación.
Grafica 8. Perfil de altura obtenido.
Grafica 9. Perfil de inclinación.
5.3.3 Filtrado de datos de velocidad y aceleración.
Como fue mencionado en la sección 4.3.3 es necesario utilizar un filtro para estas
dos variables esenciales para el posterior cálculo energético. A continuación se
presentara el contraste entre una señal filtrada y una que no lo ha sido.
Grafica 10. Influencia del filtro en la distribución de velocidad.

39
Grafica 11. Influencia del filtro en el perfil de aceleración.
Como se observa en las gráfica 10 la distribución de velocidad tiene repentinas
caídas y picos como se había mencionado por discontinuidades de señal, estas a
su vez se ven reflejada en la gráfica 11 de aceleración, pues se sufren
aceleraciones instantáneas muy altas tanto negativas como positivas. El filtro
“savitzky golay” grado 1 con una ventana de 60 puntos cumple su función de
suavizar las señales tanto de velocidad y aceleración sin influenciar en su forma,
esto es esencial para no influenciar en las variables que van a permitir cuantificar
tanto el gasto como la regeneración de energética en el análisis de microciclo y
además de las variables estadísticas que serán pieza fundamental del análisis de
circuito.
6 Resultados.
6.1 Resultados de variables estadísticas y energéticas.
En esta sección se presentarán y analizarán los datos obtenidos después de
aplicar el modelo energético completo, la relación existente entre las variables
estadísticas y energéticas que desembocan en el análisis de cada tramo del
circuito para terminar en el circuito completo.
De acuerdo a lo anterior se procede a mostrar dos resultados opuestos para el
análisis de microciclo individual, el primero de estos es el caso donde el microciclo
cumple los requisitos necesarios para que el vehículo regenere energía y el
segundo un microciclo que no cumple las características.

40
Grafica 12. Distribución de velocidad del primer microciclo.
En la gráfica 12 se presenta un ejemplo de microciclo que es apto para regenerar,
principalmente porque cumple la característica de tener velocidades mayores a la
mínima de regeneración (24 km/h). Partiendo de este y de las ecuaciones de
potencia se obtiene la siguiente gráfica.
Grafica 13. Potencia de interacción del microciclo.
En la gráfica 13 se grafica un ejemplo de la potencia de interacción
correspondiente al microciclo antes mencionado, en esta grafica se observa de
color azul el escenario donde la potencia de interacción es mayo a cero, es decir
cuando el vehículo esta en régimen de tracción y consume energía de las
baterías, por otro lado de color verde, se observa la potencia de interacción
cuando es menor a cero, en este caso la potencia se encuentra en régimen de
frenado y es en este régimen cuando se lleva a cabo la regeneración de energía.
De este grafico se obtienen las diferentes energías que interactúan en la dinámica
longitudinal del vehículo utilizando las ecuaciones (5) y (6).

41
Grafica 14. Consumo energético del microciclo en %.
En la gráfica 14 se presenta un ejemplo de la distribución porcentual de las
energías que interactúan en el vehículo de acuerdo al microciclo presentado. Se
observa la energía consumida por ascenso es mínima y esto tiene como base, el
hecho de que se eligió una zona con poca variabilidad en inclinación pues el
modelo utilizado para calcular el perfil de alturas es muy sensible a los grandes
cambios de inclinación generando una incertidumbre grande en el consumo del
vehículo. Si se quisiera llevar a cabo esta metodología en lugares con grandes
cambios de inclinación, se sugiere utilizar un método paralelo de medición (como
un inclinómetro) de esta variable para obtener resultados más confiables. De la
misma manera, la gráfica presenta que el 32% de la energía presente en el
movimiento del vehículo fue consumida en forma de frenado, de este porcentaje
se obtiene la regeneración de energía utilizando las ecuaciones (7) y (8). Teniendo
en cuenta es to último se obtiene lo siguiente:
Grafica 15. Distribución de energía de frenado en%.
En la gráfica 15 se presenta un ejemplo de la distribución porcentual de la energía
de frenado, dividida en energía regenerada y energía de frenado puro. La energía

42
regenerada que para este microciclo fue del 28% hace referencia a la porción que
se hace aprovechable al momento de realizar el frenado del vehículo, el 72%
restante, se disipa mediante el mecanismo de frenado tradicional en este caso de
disco en las 4 ruedas. Con esto en mente, se pude decir que del total de energía
involucrada en movimiento solo un 8.96% es regenerada, este porcentaje se
obtiene al multiplicar el porcentaje de energía regenerada(28%) por el porcentaje
de energía de frenado total del movimiento (32%).
Por último, se analiza la descarga de la batería suponiendo que esta se encuentra
cargada en un 100%.
Grafica 16. Descarga de la batería durante el microciclo.
En la gráfica 16 se observan un ejemplo de dos graficas de descarga de la batería,
una de ellas la de color azul, presenta la descarga de la batería sin tener en
cuenta la regeneración de energía, es decir, se supone que la energía de frenado
distribuye un 100% para el sistema tradicional de frenos. Por otro lado, se
presenta en color verde la gráfica del estado de descarga de la batería con

43
regeneración, donde si se tiene en cuenta la energía recuperada por el sistema de
freno regenerativo del vehículo.
Por último se presenta una tabla donde se muestran los valores de energía
involucrados en el microciclo.
[J] [%]
Erodadura 341.01 22.919
Eaero 69.08 4.643
Einef 477.60 32.099
Efre 418.063 28.098
Ereg 158.660 10.663
Eascenso 23.49 1.579
Suma 1487.90 100.00 Tabla 8. Energías y porcentajes involucrados en el microciclo.
Se procede ahora a analizar bajo las mismas condiciones, un ejemplo de
microciclo que no cumple con las características necesarias para regenerar
energía.
Grafica 17. Distribución de velocidad del microciclo.
En la gráfica 17 se presenta un ejemplo de microciclo que no es apto para
regenerar, principalmente porque no cumple la característica de tener velocidades,
memores a la mínima de regeneración (24 km/h). Partiendo de este y de las
ecuaciones de potencia se obtiene la siguiente gráfica.

44
Grafica 18. Potencia de interacción del microciclo
Se observa en la gráfica 18 que en comparación con la 13, la potencia de
interacción tanto en el escenario de tracción como de frenado tiene valores muy
pequeños, dada la poca energía involucrada en el movimiento.
Grafica 19. Consumo energético del microciclo en %.
En la gráfica 19 se presenta un ejemplo de la distribución porcentual de las
energías que interactúan en el vehículo de acuerdo al microciclo presentado. Se
observa la a comparación con la gráfica 14 que la energía de ascenso y
aerodinámica se hacen menores al 1%, lo que quiere decir que son insignificantes
comparadas con las demás. Lo anterior se debe a que este microciclo en
particular, no recorre mucha distancia y su velocidad es muy baja, generando
arrastre aerodinámico insignificante y no representativo al igual que el perfil de
ascenso.

45
Grafica 20. Distribución de energía de frenado en%.
En la gráfica 20 se hace evidente que la energía recuperada por el freno regenerativo es cero pues, lo cual corrobora lo anteriormente dicho de que el microciclo no es apto para regenerar energía.
Grafica 21. Descarga de la batería durante el microciclo.
En la gráfica 21, se observa como la descarga de la batería es igual en régimen de
regeneración y sin ella, esto es obvio dado que la energía regenerada en el
microciclo es cero.

46
Por último se muestra la tabla donde se encuentran los valores de energía
involucrados en el microciclo.
[J] [%]
Erodadura 38.019 46.126
Eaero 0.330 0.4013
Einef 31.895 38.697
Efre 12.177 14.774
Ereg 0 0
Eascenso 1.646E-11 1.998E-11
Suma 82.4233586 100 Tabla 9. Energías y porcentajes involucrados en el microciclo.
Continuando con el análisis de microciclos, se procede a mostrar los resultados de las variables estadísticas de los dos microciclos mostrados anteriormente.
Tabla 10. Variables estadísticas de microciclos.
Las variables estadísticas presentadas en la tabla 10 permiten realizar
conclusiones a parte de las ya explicadas anteriormente. El microciclo 1, presenta
la peculiaridad de tener una velocidad promedio mayor a 6.66 m/s que equivale a
24km/h, la cual como ya se ha mencionada es la velocidad mínima de
regeneración. Al tener una velocidad promedio mayor a esta, es evidente que
durante el recorrido hay una mayor posibilidad de regenerar energía, caso
contrario al microciclo 2 donde su velocidad es mucho menor a la mínima de
regeneración. Del mismo modo, la varianza que permite medir la dispersión de la
distribución, lo cual permite intuir que microciclos con una varianza grande tendrán
una mayor regeneración de energía. Analizando ahora la oblicuidad que mide la
simetría de la distribución, se observa que la oblicuidad negativa del microciclo 1
genera una mayor regeneración de energía, por último el coeficiente de kurtosis
en ambos casos es negativo, por lo cual una distribución leptokurtica puede
regenerar o no energía.
Por otro lado, en anexos se presenta una tabla con diez microciclos donde se
encuentra la energía regenerada y las variables estadísticas, que permiten
M1 M2
Tiempo (s) 184.35 48.85
Vel prom (m/s) 7.38 1.27
Varianza 10.35 0.65
Oblicuidad -0.53 0.02
Kurtosis -0.48 -0.89

47
observar las relaciones anteriormente expuestas, del mismo modo es una
aproximación al análisis en conjunto de tramos y de circuito.
Las correspondientes graficas de velocidad y de energías de los microciclos
pueden ser obtenidas mediante el código del modelo que se adjuntara por medio
digital.
Las anteriores variables analizadas a pesar de ser individuales para cada uno de
los microciclos, se analizaran de manera conjunta para compararlos ente si de una
manera más eficiente. Del mismo modo un análisis de este tipo, permite ser más
concluyente dado que se analiza una población completa de microciclos y no
solamente dos de ellos como se ha realizado. A continuación se presentaran una
serie de graficas que relacionan las variables estadísticas con la energía
regenerada.
Grafica 22.Energía regenerada vs Vprom
De la gráfica 22 a la 25, se procedió a graficar la energía regenerada contra
variables estadísticas de totalidad de microciclos durante las cuatro pruebas, esto
con el fin de comparar la totalidad de pruebas realizadas y analizarlas
conjuntamente lo que permite analizar el circuito completo.
En primer lugar la gráfica 22, relaciona la energía regenerada con la velocidad
promedio de los microciclos, en general se observa que al superar los 7m/s es
decir aproximadamente 24km/h que es la velocidad mínima para regenerar
energía, se tienen magnitudes de energía regenerada más alta, los microciclos
cuya velocidad promedio es menor a este valor y sin embargo tienen energía
regenerada diferente a cero es una población de 19.9% y son aquellos que

48
poseen picos de velocidad altos pero que no se mantienen a lo largo de su
recorrido es por esto que su energía regenerada es baja, pues solamente un 4.5%
de estos supera los 50J regenerados. Por otro lado, se observa que solo el 15%
de los microciclos con velocidades promedio por encima de 7m/s regeneran
menos de 100J lo cual corrobora que al superar esta velocidad promedio la
regeneración de energía se realiza en mayor magnitud. Por ultimo de la población
de microciclos que superan la velocidad promedio de 10m/s y cuya regeneración
es mayor a 500J es 75% lo cual indica que a mayores velocidades promedio
mayor hay mejor regeneración de energía.
Grafica 23. Energía regenerada vs σ^2
Centrándose en la varianza representada en la gráfica 23 se observa al igual que
la velocidad promedio que a mayor sea esta, la energía regenerada será más alta.
Esto es evidente dado que el 81% de los microciclos cuya varianza es mayor a 20
regeneran más de 500J. Caso contrario a los microciclos cuya varianza está por
debajo de 10 de este valor pues solamente el 11% logran regenerar más de 100J.

49
Grafica 24. Energía regenerada vs Sks
Pasando ahora a la oblicuidad que es la medida de asimetría de la distribución, se
observa que el 69% de los microciclos que tienen esta variable negativa,
regeneran más de 100J mientras que para oblicuidades positivas solamente el
25% superan esta energía. Este parámetro de la distribución como fue
mencionado en la sección 2.6.1 al ser negativo indica que en las desaceleraciones
es donde se encuentran los mayores regímenes de regeneración, lo cual es
evidente dado que cuando se está desacelerando generalmente se entra al
escenario de potencia de interacción negativa, es decir potencia de frenado que se
traduce en energía regenerada.
Grafica 25. Energía regenerada vs Ks.
Por ultimo analizando el coeficiente de kurtosis, se observa que las energías
regeneradas por microciclo más altas están centradas en valores cercanos a 0, lo
50
cual indica que la distribución tiende a tener una forma mesokurtica, lo cual indica
regímenes de aceleración y desaceleración simétricos entre sí, sin embargo hay
una diferencia si este valor es negativo o positivo. Si el valor del kurtosis está entre
-1 y 0 el 65% de la población de microciclos regeneran más de 100J, lo cual quiere
decir que la distribución a pesar de tener una forma platykurtica donde las
aceleraciones y desaceleraciones son bajas presentan una aceptable
regeneración de energía, por otro lado si la distribución de velocidad tiene una
forma leptokurtica y su coeficiente de kurtosis está entre 0 y 1 el 80% de estos
microciclos tendrá una energía regenerada por encima de 100J.
Si se realiza un análisis transversal de las cuatro variables estadísticas, es posible
decir que el 87% de los microciclos cuya velocidad sea mayor a 10m/s, con
oblicuidad negtiva y coeficiente de kurtosis entre 0 y 1, regeneraran más de 150J.
Por otro lado solo el 33% de los microciclos con velocidad mayor a 10m/s,
oblicuidad negativa y coeficiente de kurtosis entre -1 y 0, regeneraran más de
150J. Lo cual visto desde la perspectiva del conductor del vehículo quiere decir
que la mejor condición de manejo para la regeneración de energía en la zona
especificada consiste manejar a una velocidad promedio de 36km/h, realizar
aceleraciones sostenidas más no abruptas y frenadas de la misma manera. Por
último se mostrara la incidencia del número de microciclos en la regeneración de
energía, este proceso tiene como fin dar un acercamiento de como las condiciones
de trafico afectan la regeneración de energía.

51
Grafica 26. Diferencia entre Energía consumida y Energía regenerada en la Prueba 1.
Grafica 27.Diferencia entre Energía consumida y Energía regenerada en la Prueba 2.
Grafica 28.Diferencia entre Energía consumida y Energía regenerada en la Prueba 3
Grafica 29. Diferencia entre Energía consumida y Energía regenerada en la Prueba 4
Desde la gráfica 26 hasta la 29, dejan en evidencia que a una mayor cantidad de
microciclos en un tramo de circuito, mayor será la diferencia entre la energía
consumida y la regenerada, es decir que un recorrido que implique realizar
múltiples paradas en una distancia no mayor a 10km no permitirá que se lleve a
cabo una regeneración de energía eficiente. Lo anterior desde perspectiva del
conductor se traduce en a una alta densidad de tráfico en la ciudad, menor será la
cantidad de energía que se podrá regenerar.
6.2 Comparación de resultados con los datos obtenidos del vehículo.
Por último se realizara una comparación del consumo y la distancia calculada y
medida respectivamente en la sección anterior con los resultados obtenidos en la
sección 5.3.2.
En primera instancia se debe tener en cuenta que la variable energética del
consumo comparada con el consumo obtenido directamente del vehículo permite
apreciar que tan adecuado es el modelo, que del mismo modo se relaciona con la
energía regenerada por el vehículo en las condiciones viales expuestas dado que
sin este apoyo energético el consumo calculado seria mayor al real.

52
Los resultados energéticos contenidos del vehículo y del cálculo, son mostrados
continuación en cada una de las pruebas.
Tabla 11. Resultados globales energéticos.
El consumo de abordo hace referencia al medido desde la cabina del vehículo,
mientras que el calculado es la suma total de la energía consumida a lo largo del
circuito en cada una de las pruebas. Del mismo modo se observan las distancias
tanto del odómetro que hace referencia a la del vehículo, como a la medida por el
Vbox Sport.
Estos resultados se comparan a continuación por medio de un análisis porcentual.
Tabla 12. Porcentaje de error en distancia y consumo.
En la tabla 12 se observa que el error del consumo tiene un desfase de 15%
tomando como medida de referencia el consumo de abordo, esto quiere decir que
el modelo se ajusta de manera significativa a la realidad. Del mismo modo, el error
de 4.052% en la medida de distancia entre el odómetro y el instrumento de
medición, se traduce en una incertidumbre de ±2.02km, lo cual quiere decir que el
instrumento de medición tiene un desfase considerable a pesar del tratamiento de
la señal y este a su vez es la fuente de mayor error en la medición pues afecta
directamente el consumo.
.
Cons abordo Cons Calculado Dist Odo (km) Dist Medida (km)
P1 16 17.158 47 47.038
P2 15 17.812 47 47.030
P3 18 22.966 46 51.911
P4 20 24.812 47 48.511
Resultados globales
%Error Cons %Error Dist
P1 6.751 0.081
P2 15.786 0.063
P3 21.623 12.850
P4 19.395 3.214
Promedio 15.889 4.052
Porcentaje de error por prueba.

53
Tabla 13. Consumo kWh/km.
Por otro lado si se quiere analizar cuanto es este desfase en términos que el
usuario final del vehículo pueda observar se debe estimar el consumo por km pues
este es el que se quiere reducir al momento de operar el vehículo de una manera
energéticamente más eficiente. El error promedio de 8.42% se traduce en una
incertidumbre de ±0.025kWh/km que a su vez es aproximadamente recorrer
±0.45km/kWh que si se multiplica al valor de la carga total representa recorrer
±24.86km.
7. Conclusiones y recomendaciones.
El presente trabajo constituye un adelanto que permite crear una primera
aproximación a la evaluación energética de dispositivos introducidos a vehículos
eléctricos que aumentan su autonomía operando en condiciones no óptimas,
como lo es el tráfico de Bogotá, la deficiente malla vial de la misma y la cultura de
manejo presente en los conductores.
De acuerdo a esto la metodología planteada permite calcular teniendo de manera
aproximada la energía recuperada por el freno regenerativo del BYD e6 operando
en la zona de ciudad salitre.
Del mismo modo la metodología permite minimizar el efecto de las variables no
controladas como las condiciones de tráfico, la caída de señal del dispositivo de
medición, los factores ambientales entre otros, enfocándose fuertemente en un
diseño experimental que permite realizar las pruebas de la manera más repetitiva
posible que es un factor fundamental para la comparación de los resultados de las
mismas.
El apoyo en trabajos anteriores fue un actor fundamental que permitió desarrollar
el proyecto de manera adecuada, pues basado en estas metodologías se logró un
análisis efectivo de los resultados obtenidos a diferentes escalas, por microciclos
individuales, tramos de circuito, el circuito completo y el análisis de las diferentes
pruebas en conjunto.
kWh/km kWh/km (cal) % Error
P1 0.222 0.224 0.849
P2 0.209 0.233 11.253
P3 0.254 0.272 7.110
P4 0.274 0.314 14.475
Promedio 8.422
Consumo

54
Así mismo se determinó que el modelo energético propuesto es acertado al
momento de comparar los resultados calculados y los observados en las pruebas
experimentales, que puede ser utilizado de manera amplia en futuros trabajos que
se basen en mediciones cinemáticas para determinar las interacciones
energéticas entre un vehículo eléctrico y su entorno de operación.
Por otro lado mediante el análisis integral de las variables estadísticas
desarrollado, es posible dar una aproximación de como operar el vehículo de la
manera más eficiente en pro de la regeneración de energía eléctrica.
Así mismo, se sugiere que en trabajos futuros donde se tenga una inclinación
considerable en las pruebas de circuito, se instrumente un equipo adicional que
logre medir esta variable de una manera directa y no por la aproximación de
interpolación que fue utilizada, dada la incertidumbre que se genera al momento
de utilizar el perfil de alturas obtenido.
Del mismo modo, se sugiere en la medida de lo posible que se utilice el mismo
vehículo eléctrico y conductor en todas las pruebas a realizar, por cuestiones
logísticas en este proyecto no fue posible realizarlo y esto introduce un error en las
medidas de abordo que no se puede determinar, dadas las diferentes condiciones
de desgaste entre vehículos y los diferentes estilos de manejo entre conductores.
Referencias:
Bermudez, M. A. (Julio de 2011). Metodología para el desarrollo piloto del ciclo de
conducción para Bogotá, Colombia. Bogota, Bogota.
Boretti, A. (20 de Abril de 2010). Comparison of fuel economies of high efficiency
diesel and hydrogen engines powering a compact car with a flywheel based
kinetic energy recovery systems. Victoria, Ballarat, Australia.
BYD-Company-Limited. (2014). BYD.com. Recuperado el 31 de Marzo de 2014,
de http://www.byd.com/la/auto/e6.html#specs
Diario-Motor. (15 de 4 de 2014). Diario Motor. Recuperado el 15 de Abril de 2014,
de http://www.diariomotor.com/2010/05/22/byd-e6-en-el-salon-de-madrid-
2010/byd-e6-madrid02/
Fuhs, A. (2009). Hybrid vehicles and the future of personal transportation . Boca
Raton.: CRC Press.
Husain, I. (2010). Electric and hybrid vehicles: design fundamentals. Boca raton.:
Taylor & Francis.

55
López, Á. L. (15 de Abril de 2013). Aprovechamiento de la energía procedente del
frenado regenerativo en ferrocarriles metropolitanos. Madrid, Madrid,
España.
MathWorks. (10 de 03 de 2015). Savitzky-Golay Smoothing Filter. Obtenido de
http://www.mathworks.com/matlabcentral/fileexchange/3514-savitzky-golay-
smoothing-filter?s_tid=srchtitle
Muñoz-Rincón-Roa-Sierra. (2015). Estimación del consumo energético de
vehículos eléctricos basada en mediciones cinemáticas. Bogotá.
Obando, A. (2009). Desarrollo de una metodología para calcular un ciclo de
conducción urbano para obtener la eficiencia energética en vehículos
automotores. Bogotá: Universidad de los Andes.
Panesso Riveros, J. S. (2012). Caracterización de la dinámica longitudinal de un
vehículo para diferentes condiciones viales colombianas. Bogota:
Universidad de los Andes.
Race-Tools. (2014). Vbox mex. Recuperado el 15 de Abril de 2014, de
http://www.vbox.mx/
Reif, K. (2014). Fundamentals of Automotive and Engine Technology [recurso
electrónico] : Standard Drives, Hybrid Drives, Brakes, Safety Systems /.
Wiesbaden: Springer eBooks.
UAECD - IDECA. (2012). Proyecto: Mapa de Referencia para Bogotá Distrito
Capital. Obtenido de
http://www.ideca.gov.co/index.php?q=es/content/proyecto-mapa-de-
referencia-para-bogot%C3%A1-distrito-capital
Volvo-Cars. (2014). Volvo Cars.com. Recuperado el 12 de Abril de 2014, de 2014:
http://www.volvocars.com/intl/campaigns/hybrid/pages/v60-plugin-
hybrid.aspx
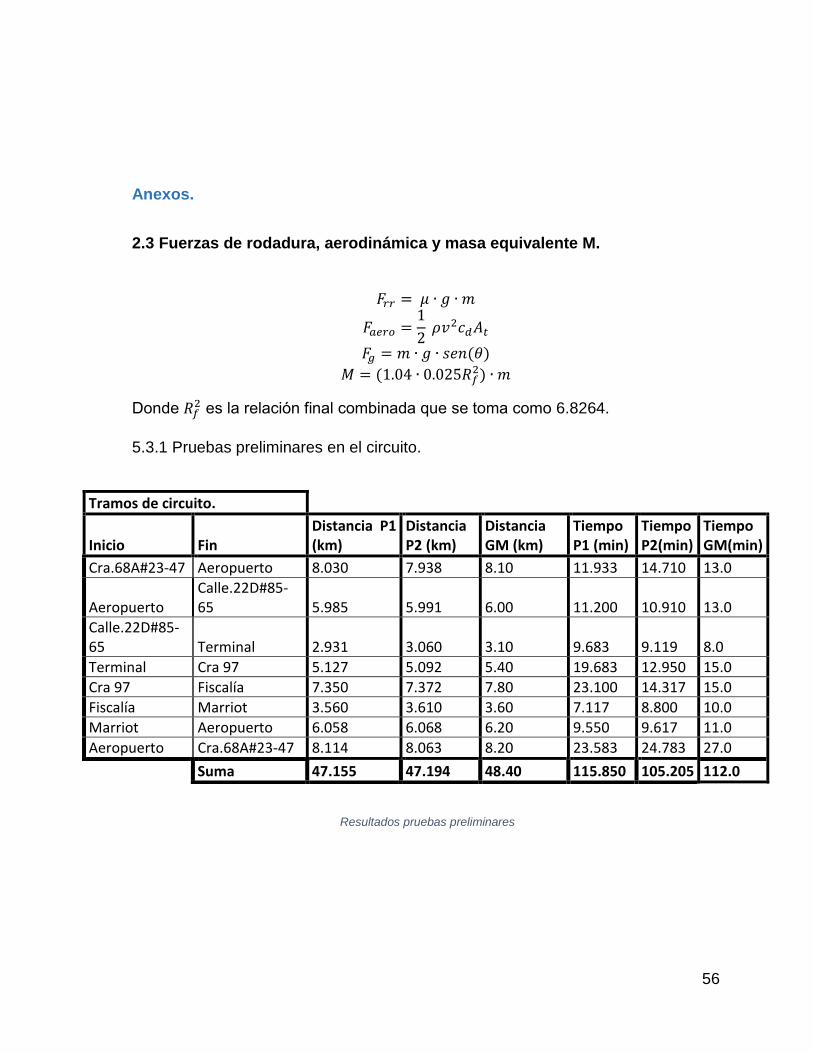
56
Anexos.
2.3 Fuerzas de rodadura, aerodinámica y masa equivalente M.
𝜇
𝜌
Donde es la relación final combinada que se toma como 6.8264.
5.3.1 Pruebas preliminares en el circuito.
Resultados pruebas preliminares
Tramos de circuito.
Inicio Fin Distancia P1 (km)
Distancia P2 (km)
Distancia GM (km)
Tiempo P1 (min)
Tiempo P2(min)
Tiempo GM(min)
Cra.68A#23-47 Aeropuerto 8.030 7.938 8.10 11.933 14.710 13.0
Aeropuerto Calle.22D#85-65 5.985 5.991 6.00 11.200 10.910 13.0
Calle.22D#85-65 Terminal 2.931 3.060 3.10 9.683 9.119 8.0
Terminal Cra 97 5.127 5.092 5.40 19.683 12.950 15.0
Cra 97 Fiscalía 7.350 7.372 7.80 23.100 14.317 15.0
Fiscalía Marriot 3.560 3.610 3.60 7.117 8.800 10.0
Marriot Aeropuerto 6.058 6.068 6.20 9.550 9.617 11.0
Aeropuerto Cra.68A#23-47 8.114 8.063 8.20 23.583 24.783 27.0
Suma 47.155 47.194 48.40 115.850 105.205 112.0

57
Distancia promedio, tiempo promedio y porcentajes de error.
5.2.2 Toma de datos experimentales.
Resultados de las pruebas, medidas de abordo.
Inicio Fin Distancia promedio Tiempo promedio %error Tiempo %error Distancia.
Cra.68A#23-47 Aeropuerto 7.98 13.32 2.47 1.43
Aeropuerto Calle.22D#85-65 5.99 11.06 14.96 0.20
Calle.22D#85-65 Terminal 3.00 9.40 17.51 3.37
Terminal Cra 97 5.11 16.32 8.78 5.38
Cra 97 Fiscalia 7.36 18.71 24.72 5.63
Fiscalia Marriot 3.59 7.96 20.42 0.42
Marriot Aeropuerto 6.06 9.58 12.88 2.21
Aeropuerto Cra.68A#23-47 8.09 24.18 10.43 1.36
Promedio 14.02 2.50
Tramos de circuito.
Inicio Fin Consumo % Distancia (km) Consumo % Distancia (km) Consumo % Distancia (km) Consumo % Distancia (km)
Cra.68A#23-47 Aeropuerto 2 8 2 8 3 8 3 8
Aeropuerto Calle.22D#85-65 2 5 2 5 2 5 3 6
Calle.22D#85-65 Terminal 1 4 1 4 1 3 2 3
Terminal Cra 97 2 5 2 5 2 5 3 5
Cra 97 Fiscalia 3 7 2 7 3 8 3 7
Fiscalia Marriot 1 3 2 3 2 3 1 4
Marriot Aeropuerto 2 7 2 7 2 6 2 6
Aeropuerto Cra.68A#23-47 3 8 2 8 3 8 3 8
Suma 16 47 15 47 18 46 20 47
Tramos de circuito. Prueba 1 Prueba 2 Prueba 3 Prueba 4

58
6. Resultado de variables estadísticas y energéticas.
Microciclos de tramo de circuito.
Energía Reg (J) Vel prom (m/s) Varianza Oblicuidad Kurtosis
M1 158.66 7.38 10.35 -0.53 -0.48
M2 0.00 1.27 0.65 0.02 -0.89
M3 0.00 0.84 1.09 1.00 -0.47
M4 136.91 7.91 13.76 -0.72 -0.83
M5 52.93 5.53 7.30 -0.22 -1.00
M6 6.69 3.84 6.74 0.29 -1.32
M7 34.07 7.02 5.81 -1.71 1.87
M8 168.37 9.22 10.31 -1.12 0.30
M9 0.00 0.34 0.09 -0.08 -1.75
M10 57.34 6.72 19.45 -0.25 -1.56





























