Embed Size (px)
Citation preview

sid.inpe.br/mtc-m19/2011/05.04.12.08.10-TDI
DETERMINACAO DE ORBITA EM TEMPO REAL
ATRAVES DE FILTRO NAO LINEAR DE KALMAN
SIGMA-PONTO
Paula Cristiane Pinto Mesquita Pardal
Tese de Doutorado do Curso de Pos-Graduacao em Engenharia e Tecnologia
Espaciais/Mecanica Espacial e Controle, orientada pelos Drs. Helio Koiti Kuga, e
Rodolpho Vilhena de Moraes, aprovada em 27 de maio de 2011
URL do documento original:
<http://urlib.net/8JMKD3MGP7W/39KM826>
INPE
Sao Jose dos Campos
2011

PUBLICADO POR:
Instituto Nacional de Pesquisas Espaciais - INPE
Gabinete do Diretor (GB)
Servico de Informacao e Documentacao (SID)
Caixa Postal 515 - CEP 12.245-970
Sao Jose dos Campos - SP - Brasil
Tel.:(012) 3208-6923/6921
Fax: (012) 3208-6919
E-mail: [email protected]
CONSELHO DE EDITORACAO E PRESERVACAO DA PRODUCAO
INTELECTUAL DO INPE (RE/DIR-204):
Presidente:
Dr. Gerald Jean Francis Banon - Coordenacao Observacao da Terra (OBT)
Membros:
Dra Inez Staciarini Batista - Coordenacao Ciencias Espaciais e Atmosfericas (CEA)
Dra Maria do Carmo de Andrade Nono - Conselho de Pos-Graduacao
Dra Regina Celia dos Santos Alvala - Centro de Ciencia do Sistema Terrestre (CST)
Marciana Leite Ribeiro - Servico de Informacao e Documentacao (SID)
Dr. Ralf Gielow - Centro de Previsao de Tempo e Estudos Climaticos (CPT)
Dr. Wilson Yamaguti - Coordenacao Engenharia e Tecnologia Espacial (ETE)
Dr. Horacio Hideki Yanasse - Centro de Tecnologias Especiais (CTE)
BIBLIOTECA DIGITAL:
Dr. Gerald Jean Francis Banon - Coordenacao de Observacao da Terra (OBT)
Marciana Leite Ribeiro - Servico de Informacao e Documentacao (SID)
Deicy Farabello - Centro de Previsao de Tempo e Estudos Climaticos (CPT)
REVISAO E NORMALIZACAO DOCUMENTARIA:
Marciana Leite Ribeiro - Servico de Informacao e Documentacao (SID)
Yolanda Ribeiro da Silva Souza - Servico de Informacao e Documentacao (SID)
EDITORACAO ELETRONICA:
Viveca Sant´Ana Lemos - Servico de Informacao e Documentacao (SID)

sid.inpe.br/mtc-m19/2011/05.04.12.08.10-TDI
DETERMINACAO DE ORBITA EM TEMPO REAL
ATRAVES DE FILTRO NAO LINEAR DE KALMAN
SIGMA-PONTO
Paula Cristiane Pinto Mesquita Pardal
Tese de Doutorado do Curso de Pos-Graduacao em Engenharia e Tecnologia
Espaciais/Mecanica Espacial e Controle, orientada pelos Drs. Helio Koiti Kuga, e
Rodolpho Vilhena de Moraes, aprovada em 27 de maio de 2011
URL do documento original:
<http://urlib.net/8JMKD3MGP7W/39KM826>
INPE
Sao Jose dos Campos
2011

Dados Internacionais de Catalogacao na Publicacao (CIP)
Pardal, Paula Cristiane Pinto Mesquita.P213d Determinacao de orbita em tempo real atraves de filtro nao
linear de Kalman sigma-ponto / Paula Cristiane Pinto MesquitaPardal. – Sao Jose dos Campos : INPE, 2011.
xxvi+120 p. ; (sid.inpe.br/mtc-m19/2011/05.04.12.08.10-TDI)
Tese (Doutorado em Engenharia e Tecnologia Espaci-ais/Mecanica Espacial e Controle) – Instituto Nacional de Pes-quisas Espaciais, Sao Jose dos Campos, 2011.
Orientadores : Drs. Helio Koiti Kuga, e Rodolpho Vilhena deMoraes.
1. Determinacao de orbita. 2. Filtro de Kalman sigma-ponto.3. Estimacao de estado. 4. GPS. 5. Perturbacoes orbitais. I.Tıtulo.
CDU 629.783:521.3
Copyright c© 2011 do MCT/INPE. Nenhuma parte desta publicacao pode ser reproduzida, arma-zenada em um sistema de recuperacao, ou transmitida sob qualquer forma ou por qualquer meio,eletronico, mecanico, fotografico, reprografico, de microfilmagem ou outros, sem a permissao es-crita do INPE, com excecao de qualquer material fornecido especificamente com o proposito de serentrado e executado num sistema computacional, para o uso exclusivo do leitor da obra.
Copyright c© 2011 by MCT/INPE. No part of this publication may be reproduced, stored in aretrieval system, or transmitted in any form or by any means, electronic, mechanical, photocopying,recording, microfilming, or otherwise, without written permission from INPE, with the exceptionof any material supplied specifically for the purpose of being entered and executed on a computersystem, for exclusive use of the reader of the work.
ii



v
“Somos a memória
que temos
e a responsabilidade
que assumimos.
Sem memória
não existimos,
sem responsabilidade
talvez não
mereçamos viver.”
José Saramago

vi

vii
À Luiza, minha mãe e meu exemplo, e ao Luís, meu marido e meu amigo,
eu dedico, com todo o meu amor e gratidão.
Por todo amor, paciência, companheirismo e apoio nestes quatro anos.

viii

ix
AGRADECIMENTOS
Ao Dr. Hélio Koiti Kuga, orientador que ensinou muitas lições fundamentais, entre elas
a de que o erro é a melhor forma de aprendizado, por sua paciência nos momentos
difíceis e por ser um exemplo de competência e excelência profissional a ser seguido.
Ao Dr. Rodolpho Vilhena de Moraes, orientador que incentivou com palavras sábias e
apoiou com palavras estimuladoras cada momento de alto e de baixo destes quatro anos.
Aos membros da Banca Examinadora, pelas valiosas contribuições para o
aprimoramento deste trabalho e pela atenção dispensada ao ler e avaliar a minha Tese e
ao me avaliar.
Ao INPE, pelas facilidades oferecidas através da organização do curso de Pós-
Graduação e do suporte e autonomia dados à Biblioteca, no sentido de sempre priorizar
o conhecimento e evolução intelectual e profissional de seu corpo discente.
À FAPESP, pelo apoio financeiro concedido, através do Processo Nº 07/53256-1, o que
permitiu aquisição de um bom equipamento de trabalho e participação em congressos
nacionais e internacionais que, de outra forma, não teriam acontecido.
A todos os amigos que estiveram ao meu lado nesta jornada. Especialmente às queridas
Rosana Aparecida Nogueira Araújo e Roberta Veloso Garcia, pelas valiosas ajudas,
pelas inteligentes sugestões, pelas palavras de incentivo que não deixaram o desânimo
predominar nos momentos de adversidade e pelas boas e necessárias risadas.
Aos funcionários do Serviço de Pós-Graduação do INPE e à Coordenação Acadêmica
do Curso de Mecânica Espacial e Controle.
À DMC do INPE, por disponibilizar o espaço físico necessário para o desenvolvimento
do trabalho e por seu tão competente corpo docente, que através de desafios, mostrou
que o limite é sempre um pouco além, possibilitando acumular conhecimentos sem os
quais não seria possível cumprir este ciclo tão importante em minha vida profissional.

x
Em especial à Queila Emerick, secretária da DMC, por facilitar, dentro de suas
possibilidades, o acesso a todo e qualquer recurso necessário para o desenvolvimento
deste trabalho; e por ser figura tão humana e sensível, tornando-se um apoio
imprescindível neste período, com seu lindo sorriso estampado no rosto.
Aos funcionários da Biblioteca do INPE, pela eficiência, pela simpatia, pelo auxílio na
construção dos roteiros para elaboração de referências bibliográficas e também pela
revisão deste trabalho, especialmente à Yolanda Ribeiro da Silva Souza. Agradeço por
estarem sempre prontos a ajudar a encontrar todo o material necessário e pela paciência
durante as correções.
A todos aqueles que contribuíram direta ou indiretamente para que esta etapa fosse
vencida, mas que por injustiça minha, nestas palavras tão rapidamente rabiscadas, não
foram citados.

xi
RESUMO
Neste trabalho determina-se a órbita de um satélite artificial, em tempo real, utilizando sinais da constelação GPS e técnicas modernas de estimação. A finalidade principal é melhorar o desempenho de processos de determinação de órbitas e, ao mesmo tempo, minimizar o custo do procedimento computacional, motivada pela aplicação de técnicas modernas de estimação ao problema de determinação de órbitas de satélites. Foi desenvolvido e implementado um filtro não linear baseado no método Sigma-Ponto, para estimar o vetor de estado que caracteriza a órbita do satélite, com base em um conjunto de observações provenientes do sistema GPS. Aplicações e testes de desempenho e precisão foram feitos, utilizando dados reais do satélite TOPEX/Poseidon. Foram analisados resultados em propagação de órbita e em determinação de órbita. Em propagação de órbita, foram avaliados os principais efeitos que perturbam a órbita do satélite de teste: geopotencial; atração gravitacional luni-solar; e pressão de radiação solar direta. As soluções de determinação de órbita obtidas para o filtro de Kalman não linear sigma-ponto, na sua variante “unscented”, foram comparadas com uma solução de referência, obtida através do filtro estendido de Kalman. Em determinação de órbita, os desempenhos dos filtros foram equivalentes quando as condições iniciais eram precisas. Mais ainda, o filtro não linear “unscented” mostrou-se mais robusto nas situações em que as amostragens estavam mais espaçadas ou as condições iniciais do vetor de estado degradadas. Quanto ao custo de tempo de processamento, verificou-se que o filtro não linear de Kalman “unscented” demanda maior tempo que o filtro estendido de Kalman, em função da natureza do algoritmo, e que, quanto mais complexo é o modelo dinâmico, maior será o tempo necessário para o processamento do vetor de estado que caracteriza a órbita. Os erros médios quadráticos das estimativas em posição, cujas componentes foram transladadas para o sistema de referência orbital, estão em torno de 17 metros em 24 horas de determinação de órbita, para o modelo dinâmico mais preciso analisado. Tais estimativas foram obtidas tanto para os resultados do filtro de Kalman “unscented” quanto para os do filtro de Kalman estendido.

xii

xiii
REAL TIME ORBIT DETERMINATION THROUGH NON LINEAR
SIGMA POINT KALMAN FILTER
ABSTRACT
In this work the orbit of an artificial satellite is determined, in real time, using signals from GPS constellation and modern estimation techniques. The main objective is to improve the performance of orbit determination procedures, and, concomitantly, to minimize the computational procedure cost, associated with the application of such modern estimation techniques to the problem of satellites orbit determination. It has been developed a non linear filter based on the Sigma-Point method, to estimate the state vector that describes the satellite orbit, based upon a set of measurements from the GPS system. Applications, performance and accuracy tests have been done, using real data from TOPEX/Poseidon satellite. Results from orbit propagation and orbit determination have been analyzed. In orbit propagation, the main effects that affect the orbit of the test satellite were evaluated: Earth’s gravitational field; Sun-Moon gravitational attraction; and direct solar radiation pressure. The orbit determination solutions obtained for the non linear sigma-point Kalman filter, in its unscented version, were compared with a reference solution, obtained through the extended Kalman filter. In orbit determination, the performances of the estimators were equivalent when the initial conditions were accurate. And more, the non linear unscented filter has shown more robustness in the situations where the time between two observations was more spaced or the initial conditions of the state vector degraded. Regarding the processing time cost, one verified that the non linear unscented Kalman filter demands more CPU time than the extended Kalman filter, because of the basic nature of the algorithm. Besides, the more complex is the dynamical model, the greater it will be the time needed to process the state vector that describes the orbit. The root mean square errors of the position estimates, which components were translated to the orbital reference frame, are around 17 meters covering 24 hours of orbit determination, for the most precise dynamical model adopted. Such estimates were obtained for the results from the unscented Kalman filter as well as the extended Kalman filter.

xiv

xv
LISTA DE FIGURAS
4.1 - Constelação GPS. ............................................................................................................ 14 5.1 - Filtro de Kalman modificado, gerando o UKF. ............................................................... 23 6.1 - Método Geométrico ......................................................................................................... 28 6.2 - Erros reais e estimados em posição e velocidade para o dia 05/01/1994 –
implementação pelo UKF. .............................................................................................. 34 6.3 - Erros reais e estimados em posição e velocidade para o dia 05/01/1994 –
implementação pelo UKF. .............................................................................................. 34 6.4 - Comportamento típico dos resíduos da pseudo-distância – implementação pelo
UKF. ................................................................................................................................ 35 7.1 - Satélite TOPEX/Poseidon ................................................................................................ 44 7.2 - Sistema de coordenadas de referência do T/P, os ângulos Ω* e β’ . ................................ 45 7.3 - Macromodelo de Marshall e Luthcke. ............................................................................. 46 9.1 - Propagação de órbita em função do tempo: inclusão do geopotencial até ordem
10; do geopotencial até ordem 28; e da atração luni-solar, para os dias 19/11/1993 e 05/01/1994. ............................................................................................... 64
9.2 - Erros nas coordenadas radial, normal e transversal para o dia 19/11/93, resultantes da implementação do geopotencial 10x10 pelo UKF (à esquerda) e pelo EKF (à direita). ....................................................................................................... 69
9.3 - Destaque da primeira hora de estimação do comportamento dos erros nas coordenadas radial, normal e transversal para o dia 19/11/93, resultantes da implementação do geopotencial 10x10 pelo UKF (à esquerda) e pelo EKF (à direita). ............................................................................................................................ 70
9.4 - Erros nas coordenadas radial, normal e transversal para o dia 19/11/93 – comparação entre a implementação do geopotencial 10x10 e a do geopotencial 28x28 pelo UKF (à esquerda) e pelo EKF (à direita). .................................................... 72
9.5 - Erros nas coordenadas radial, normal e transversal para o dia 19/11/93 – comparação entre a implementação do geopotencial 28×28 e a da atração gravitacional luni-solar pelo UKF (à esquerda) e pelo EKF (à direita). ......................... 74
9.6 - Erros nas coordenadas radial, normal e transversal para o dia 19/11/93, resultantes da implementação da pressão de radiação solar direta pelo UKF. ............... 76
9.7 - Resíduo de pseudo-distância ao longo do tempo para o modelo que inclui até a pressão de radiação solar direta, para o dia 19/11/1993. ................................................ 78
9.8 - Comportamento típico de resíduos de pseudo-distância preditos, obtidos via UKF, para um intervalo de amostragem de 60 s e dados do dia 19/11/1993. ................ 83
9.9 - Comportamento dos resíduos de pseudo-distância preditos obtidos via UKF e EKF, para um intervalo de amostragem de 300 s e dados do dia 19/11/1993. ............... 86
9.10 - Comportamento dos resíduos de pseudo-distância: casos de referência e de 1000 km de incerteza nas condições iniciais. ................................................................. 90
9.11 - Comportamento comparativo dos resíduos de pseudo-distância para os casos intermediários de teste de incertezas nas condições iniciais. .......................................... 92
9.12 - Comportamento dos erros em coordenadas RNT: casos de referência e de 1000 km de incerteza nas condições iniciais. .......................................................................... 94
9.13 - Comportamento comparativo dos erros em coordenadas RNT para o caso de 1 km de incerteza nas condições iniciais. .......................................................................... 95
9.14 - Comportamento comparativo dos erros em coordenadas RNT para o caso de 10 km de incerteza nas condições iniciais. .......................................................................... 96
9.15 - Comportamento comparativo dos erros em coordenadas RNT para o caso de 100 km de incerteza nas condições iniciais. ................................................................... 97

xvi
A.1 - Estação central de controle e estações monitoras do GPS. ........................................... 115

xvii
LISTA DE TABELAS
6.1 - Estatíticas dos quatro estimadores implementados ......................................................... 36 6.2 - Comparação de custo de tempo de processamento ......................................................... 37 7.1 - Principais parâmetros do modelo JGM-2 e do sistema WGS-84 .................................... 42 9.1 - Condições de teste para o dia 19/11/1993 ....................................................................... 58 9.2 - Condições iniciais do estimador para o dia 19/11/1993 .................................................. 59 9.3 - Condições iniciais das coordenadas de posição e de velocidade para o dia
19/11/1993 a 0 hora UTC ............................................................................................... 59 9.4 - Condições iniciais do relógio para o dia 19/11/1993 à 0 hora UTC ................................ 59 9.5 - RMS dos erros por componente e total para propagação de órbita ................................. 65 9.6 - Estatísticas resultantes dos erros para cada um dos modelos implementados tanto
pelo UKF quanto pelo EKF, para o dia 19/11/1993 ....................................................... 77 9.7 - Estatísticas dos resíduos de pseudo-distância para o dia 19/11/1993 .............................. 78 9.8 - Comparação de custo de tempo de processamento ......................................................... 79 9.9 - Estatísticas dos resíduos de psudo-distância preditos para cada modelo de forças
considerado e para cada estimador usado na determinação de órbita ............................. 84 9.10 - Velocidade de convergência dos resíduos de pseudo-distância preditos ...................... 88 9.11 - Velocidade de convergência do erro em posição .......................................................... 89 9.12 - Estatísticas dos resíduos de pseudo-distância após convergência do algoritmo ........... 89 9.13 - Erro RMS total em posição após convergência do algoritmo ....................................... 93 A.1 - Estimativa de resíduos, usando medidas de pseudo-distância ...................................... 118

xviii

xix
LISTA DE SIGLAS E ABREVIATURAS
AGLS Atração Gravitacional Luni-Solar A-S Anti-Spoofing C/A Coarse/Acquisition code CBERS China-Brazil Earth Resource Satellite CDDIS Crustal Dynamics Data Information System CDKF Filtro de Kalman de Diferenças Centrais CNES Centre National d’Etudes Spatiales CPU Central Processing Unit dBW DeciBel Watt (unidade de medida do comprimento de um sinal
expressa em decibeis relativos a 1 W) DO Determinação de Órbita EQUARS EQUatorial Atmosphere Research Satellite ERS-1 first European Remote-Sensing satellite ERS-2 second European Remote-Sensing satellite EKF Filtro de Kalman Estendido FEG Faculdade de Engenharia de Guaratinguetá FK Filtro de Kalman FORTRAN FORmula TRANslation GB GigaByte GEM10 Gravity model improvement using GEOS3 Geo10 perturbações devidas ao geopotencial até ordem e grau 10 Geo28 perturbações devidas ao geopotencial até ordem e grau 28 GEOSAT GEOdetic SATellite GPS Global Positioning System GSFC Goddard Space Flight Center IERS Internatinal Earth Rotation Service IMU Inertial Measurement Unit INPE Instituto Nacional de Pesquisas Espaciais JGM Joint Gravity Model JPL Jet Propulsion Laboratory L1 Link de transmissão - portadora 1 (1575,42 MHz) L2 Link de transmissão - portadora 2 (1227,60 MHz) NASA National Aeronautics and Space Administration MCS Master Control Station MEMS Micro Electro-Mechanical System MHz Mega-Hertz MS Monitor Stations NAVSTAR NAVigation Satellite Timing And Ranging OBC On-Board Computer P Precise code PMM Plataforma Multi-Missão PPP Posicionamento por Ponto Preciso PRN Pseudo Random Noise POD Precise Orbit Determination POE Precision Orbit Ephemeris PRS Pressão de Radiação Solar RAM Random Access Memory RF sinais de Ráfio-Frequência

xx
RINEX Receiver INdependent EXchange format RKF78 Runge-Kutta de Fehlberg de sétima ordem e passo fixo oito RMS Rooth Mean Square RNT componentes Radial, Normal e Transversal do sistema de
referência fixo na órbita RPN Ruído Pseudo Aleatório SA Selective Availability SPKF Filtro de Kalman Sigma-Ponto T/P Ocean TOPography EXperiment (TOPEX)/Poseidon TIMATION TIMe navigATION ToD Earth True equator and equinox of Date UKF Filtro de Kalman “Unscented” UNESP UNiversidade EStadual Paulista ULS UpLoading Station UTC Universal Time Coordinated W Watt WGS World Geodetic System

xxi
LISTA DE SÍMBOLOS
a semi-eixo maior a vetor de aceleração das perturbações modeladas Ak área superficial de cada placa do T/P A área total de um satélite b vetor do desvio do relógio do receptor GPS b0 tendência do relógio do receptor GPS b1 deriva do relógio do receptor GPS b2 taxa de deriva do relógio do receptor GPS c velocidade da luz dt desvio do relógio do usuário dTi desvio do relógio do i-ésimo satélite GPS DION desvio ionosférico em relação à medida da pseudo-distância DTROP desvio troposférico em relação à medida da pseudo-distância e excentricidade fm função vetorial da modelagem adotada no estimador fnm função vetorial da parcela não modelada no estimador Fk força de pressão de radiação solar direta em cada placa do T/P G fluxo de radiação do Sol (W/m2)
( )xh função não linear de dimensão m do estado
[ ]iχh transformação não linear associada ao i-ésimo sigma-ponto
H matriz que relaciona as medidas aos elementos do estado i inclinação I matriz identidade J2 efeito do achatamento da Terra Jnm, nmλ constantes que dependem da distribuição de massa da Terra
K ganho de Kalman K ganho de Kalman obtido através da propagação dos sigma-pontos n versor normal à placa do T/P m dimensão do vetor de observações M anomalia média n dimensão do vetor de estado N ambiguidade inicial (número de ciclos não lidos) Pi pseudo-distância medida pelo usuário em relação ao i-ésimo satélite
GPS Pnm funções de Legendre associadas P matriz de covariância dos erros dinâmicos Pxx covariância de uma variável aleatória Pyy covariância de uma observação Pxy matriz de correlação cruzada Pνν covariância dos resíduos de pseudo-distância preditos (inovação) Pyd matriz de covariâncias dos observáveis de dupla diferença Q matriz de ruído da dinâmica RT raio médio da Terra r distância radial do veículo espacial r vetor posição
iGPSR vetor posição do i-ésimo satélite GPS

xxii
R matriz de ruído das observações s versor de incidência do Sol na placa do T/P Snm, Cnm coeficientes esféricos harmônicos normalizados t tempo T0 instante de transmissão do sinal do i-ésimo satélite GPS Ti instante de recepção do sinal do i-ésimo satélite GPS v vetor velocidade x vetor de estado x média de uma variável aleatória
0x estimativa inicial do estado
y vetor de observações y média de uma observação y conjunto de sigma-pontos transformados
w vetor ruído Wi matriz peso do i-ésimo sigma-ponto α parâmetro de controle do espalhamento dos sigma-pontos β’ declinação do Sol δ coeficiente de reflexão difusa ϕ ir fase da portadora completa ϕ r fase da portadora do receptor no instante de recepção ϕ i fase da portadora do satélite no instante de recepção ϕϕϕϕ matriz de transição que relaciona o estado entre os instantes tk-1 e tk κ fator que fornece mais um grau de liberdade, para o “ajuste fino” dos
momentos de ordens superiores dos sigma-pontos λ longitude nas coordenadas fixas na Terra φ latitude geocêntrica µ constante gravitacional terrestre νννν vetor de erros na observação ρρρρ vetor de medidas de pseudo-distância observada ρ coeficiente de reflexão especular ρρρρc vetor de pseudo-distâncias calculadas ρρρρi pseudo-distância, posição do usuário em relação ao i-ésimo satélite σ desvio padrão
2iσ variância
jiσ correlação
ω argumento do perigeu Ω longitude do nodo ascendente θ ângulo formado entre os versores n
) e s
)
Ω* ângulo da órbita χ vetor de sigma-pontos gerados, a partir da média e da covariância de
uma variável aleatória ∆ρρρρ resíduo de pseudo-distância ∆r vetor erro em posição ∆ti intervalos de tempo de propagação

xxiii
Índices Superiores
^ estimado ~ propagado T transposto
Índices Inferiores 0 inicial B sistema de referência fixo no satélite GPS refere-se aos dados dos satélites GPS k instante de tempo atual O sistema de referência orbital T Terra u refere-se ao satélite usuário (carrega o receptor GPS a bordo)

xxiv

xxv
SUMÁRIO
Pág. 1 INTRODUÇÃO ............................................................................................ 1 1.1 Objetivos ........................................................................................................ 2 1.2 Justificativa e Motivações .............................................................................. 2 2 REVISÃO BIBLIOGRÁFICA ................................................................... 5 3 METODOLOGIA ........................................................................................ 9 4 TÉCNICAS DE DETERMINAÇÃO DE ÓRBITA DE SATÉLITES
ARTIFICIAIS ............................................................................................ 11 4.1 Modelagem da Dinâmica Orbital ................................................................. 11 4.2 Modelagem das Medidas Usadas em Determinação de Órbita ................... 12 4.3 Técnicas de Estimação ................................................................................. 14 4.3.1 Estimadores de Tempo Real ........................................................................ 15 4.3.1.1 Filtro de Kalman .......................................................................................... 15 5 FILTROS DE KALMAN DO TIPO SIGMA-PONTO ............. ............. 19 5.1 Introdução .................................................................................................... 19 5.2 Os Filtros da Família Sigma-Ponto .............................................................. 19 5.3 O Filtro de Kalman “Unscented” ................................................................. 20 5.3.1 Transformação “Unscented” ........................................................................ 21 5.3.2 Filtro de Kalman “Unscented” ..................................................................... 23 5.4 Comparação entre EKF e UKF .................................................................... 24 5.5 Aplicações .................................................................................................... 25 6 APLICAÇÃO DO UKF PARA DETERMINAÇÃO DE ÓRBITA COM
CARACTERÍSTICAS DE TEMPO REAL ............................................. 27 6.1 Utilização do UKF em Determinação de Órbita .......................................... 27 6.2 Resultados: Algoritmo do UKF Implementado para Determinação de
Órbita ........................................................................................................... 32 7 MODELO DE FORÇAS ........................................................................... 39 7.1 Perturbações Devidas ao Campo Gravitacional Terrestre ........................... 39 7.1.1 Modelo de Geopotencial Considerado ......................................................... 41 7.2 Perturbações Devidas à Pressão de Radiação Solar ..................................... 42 7.2.1 Modelo Específico de Pressão de Radiação Solar Direta para o T/P........... 44 7.3 Perturbações Devidas à Atração Gravitacional Luni-Solar ......................... 47 8 AJUSTES NECESSÁRIOS PARA APLICAÇÃO DOS ALGORITMOS
DO EKF E DO UKF AO PROBLEMA DE DETERMINAÇÃO DE ÓRBITA ...................................................................................................... 49
8.1 Aplicação do Algoritmo do EKF em DO .................................................... 49 8.2 Aplicação do Algoritmo do UKF em DO .................................................... 53

xxvi
9 RESULTADOS .......................................................................................... 55 9.1 Descrição dos Dados Utilizados .................................................................. 56 9.1.1 Resultados Obtidos ...................................................................................... 60 9.2 Análise de Propagação de Órbita ................................................................. 61 9.3 Análise de Determinação de Órbita ............................................................. 66 9.3.1 Resultados Esperados ................................................................................... 67 9.3.1.1 Geopotencial até Ordem e Grau 10 .............................................................. 67 9.3.1.2 Geopotencial até Ordem e Grau 28 .............................................................. 71 9.3.1.3 Atração Gravitacional Luni-Solar ................................................................ 72 9.3.1.4 Pressão de Radiação Solar Direta ................................................................ 75 9.3.1.5 Outras Análises Resultantes da Determinação de Órbita ............................ 77 9.3.1.6 Conclusões de Determinação de Órbita ....................................................... 80 9.4 Impacto de Diferentes Intervalos de Amostragem das Observações na
Determinação de Órbita ............................................................................... 81 9.5 Impacto da Degradação das Condições Iniciais na Determinação de
Órbita ........................................................................................................... 87 10 CONCLUSÕES E SUGESTÕES ............................................................ 100 10.1 Conclusões ................................................................................................. 100 10.2 Sugestões para Extensão do Trabalho ........................................................ 104 REFERÊNCIAS BIBLIOGRÁFICAS .................................................................. 106 ANEXO A - O SISTEMA GPS .............................................................................. 113 A.1 Segmento Espacial ............................................................................................. 113 A.2 Segmento de Controle ........................................................................................ 114 A.3 Segmento Usuário .............................................................................................. 115 A.4 Estrutura do Sinal e da Mensagem do GPS ....................................................... 115 A.5 Principais Fontes de Erros ................................................................................. 117 A.6 Posicionamento via GPS .................................................................................... 118

1
1 INTRODUÇÃO
Filtragem, predição e suavização fazem parte de um campo de pesquisa com múltiplas
aplicações práticas. Estes tópicos são abordados em dois importantes campos da
ciência: teoria de estimação e controle, e processamento de sinais digitais. As
aplicações destas teorias abrangem problemas relacionados a satélites artificiais,
geofísica, economia, telecomunicações, processos químicos e biológicos, entre outros.
A determinação de órbita, de um modo geral, envolve vários aspectos físicos e
matemáticos de naturezas distintas, entre os quais se têm: a modelagem da dinâmica
do movimento orbital e dos dados mensurados; a estabilidade numérica dos
algoritmos de processamento; e o esquema de estimação de estado, todos contribuindo
em maior ou menor grau para a precisão final.
O problema de determinação de órbita consiste no processo de obtenção dos valores
dos parâmetros que especificam completamente o movimento de um corpo espacial
(neste caso, um satélite artificial) através do espaço, baseado em um conjunto de
observações do mesmo. Estas observações podem ser coletadas através de uma rede
de rastreio terrestre ou de sensores (neste caso, por exemplo, os receptores GPS,
embarcados no próprio satélite (CHIARADIA et al., 2003).
O Sistema GPS (Global Positioning System) oferece um processo poderoso e
relativamente barato para se determinar órbitas de satélites artificiais. Teoricamente,
quatro satélites GPS, visíveis simultaneamente, são suficientes para se determinar os
parâmetros de posição de um satélite que tenha um receptor GPS a bordo. O satélite
TOPEX/Poseidon (T/P) é um exemplo de utilização deste sistema para
posicionamento no espaço. Este satélite possui um sofisticado receptor GPS a bordo
para determinar a sua posição com precisão.
O método de determinação de órbita de satélites artificiais é um problema não linear
em que as forças perturbadoras não são facilmente modeladas. Os satélites GPS
enviam sinais precisos que, baseados na comparação entre sinais recebidos e gerados
pelo receptor, possibilitam calcular pseudo-distância entre o satélite GPS e a antena
do receptor GPS. Através de um receptor GPS a bordo de um satélite artificial é
possível estimar o vetor de estado que caracteriza a órbita do satélite (KUGA, 2001).

2
Neste trabalho, propõe-se implementar um filtro não linear, com características de
tempo real, através do método sigma-ponto, para estimar o vetor de estado que
caracteriza a órbita do satélite, com base em um conjunto de observações do sistema
GPS. Esta técnica de filtragem não linear está sendo investigada em várias aplicações
e apresenta características que são vantajosas no aspecto de facilidade de
implementação, robustez e precisão.
1.1 Objetivos
O objetivo principal é desenvolver um filtro não linear, baseado no método Sigma-
Ponto, para estimar o vetor de estado que caracteriza a órbita de um satélite, com base
em um conjunto de observações do mesmo. Para tanto, será necessário:
Formular as equações diferenciais do movimento orbital na forma adequada; Formular as equações das medidas fornecidas pelo receptor GPS; Desenvolver o filtro Sigma-Ponto, inicialmente na forma genérica, e adaptá-lo
para o problema específico de determinação de órbita via GPS;
Analisar consistência estatística dos resultados e avaliar seu desempenho.
A implementação de tal algoritmo é de grande importância para algumas pesquisas
em andamento na Divisão de Mecânica Espacial e Controle do INPE, em colaboração
com o Departamento de Matemática da FEG. De fato, a determinação de órbitas com
GPS, tema de pesquisa em comum entre as duas Instituições, necessita de uma órbita
de referência precisa e a do satélite T/P é, em geral, a utilizada por estar amplamente
divulgada e ser frequentemente utilizada em trabalhos relacionados.
Paralelamente, será formado um pesquisador em uma linha de pesquisa que
certamente será aplicada no programa espacial brasileiro.
1.2 Justificativa e Motivações
Aplicações de satélites artificiais muitas vezes necessitam descrever o movimento
orbital com uma precisão submétrica. A componente radial da posição de satélites
altimétricos como ERS-1, ERS-2 e T/P (BERTIGER et al., 1994) deve ser
determinada com precisão de alguns centímetros para que as medidas de altimetria

3
possam ser usadas convenientemente. Para evitar colisões de naves espaciais, as
posições de satélites ativos e de “debris” espaciais também devem ser calculadas com
precisão métrica. Diversos processos de determinação de órbita vêm sendo
desenvolvidos para atingir estes objetivos.
Uma metodologia para este processo de determinação de órbitas, incluindo um
processo dinâmico, baixo custo computacional e levando em consideração as
principais perturbações que afetam a órbita, vem sendo desenvolvida no INPE
(Instituto Nacional de Pesquisas Espaciais) com a finalidade de ser utilizada em
satélites com participação brasileira em seu desenvolvimento, que estejam equipados
com receptor GPS, como satélites da família CBERS (China-Brazil Earth Resources
Satellite); satélite EQUARS (EQUatorial Atmosphere Research Satellite); e satélites
da PMM (Plataforma Multi-Missão).
A principal motivação para este trabalho é a aplicação de técnicas modernas de
estimação de estado ao problema específico de determinação de órbita. Devem ser
enfocados dois aspectos: o determinístico, que engloba a modelagem do sistema e a
formulação do problema em termos de adequação do sistema de equações adotado
para representar a dinâmica; e o estocástico, no qual a teoria de estimação estatística
deve ser manuseada de forma a tornar plausível sua utilização. A determinação de
órbita, em particular, apresenta um grande inconveniente adicional imposto pela
característica não linear da dinâmica do movimento e das observações.
Até o momento não se tem notícia da aplicação da técnica em um problema real, com
dados GPS reais, para o problema de determinação de órbita. Lee e Alfriend (2003,
2007) estudam a técnica em determinação de órbita convencional (sem utilizar o
sistema GPS), através de simulações e com objetivos distintos.
Para testes preliminares dos algoritmos é frequente utilizar-se no INPE as efemérides
de órbita precisa (POE) do satélite T/P (PARDAL, 2008; VILHENA DE MORAES et
al., 2005; GOMES, 2004; CHIARADIA, 2000), cujos dados do receptor GPS a bordo
e de sua órbita precisa estão disponíveis para a realização de comparações, com a
finalidade de validar os métodos desenvolvidos.

4

5
2 REVISÃO BIBLIOGRÁFICA
Kuga (1982) implementou e testou procedimentos de estimação com o objetivo de
verificar a possibilidade de sua utilização na determinação de órbita (DO), em tempo
real, de satélites artificiais de baixa altitude. Neste trabalho, o procedimento de
estimação consistiu em uma técnica adaptativa utilizando o filtro de Kalman.
Paiva (1988) desenvolveu um procedimento para DO a bordo de satélites artificiais
terrestres. Utilizou um modelo simples para a dinâmica do satélite e o filtro estendido
de Kalman como estimador de estado. A dinâmica do movimento do satélite foi
representada por expressões polinomiais para cada elemento orbital. Os resultados de
testes foram obtidos sob condições simuladas.
Kuga (1989) apresentou técnicas de filtragem e suavização aplicadas à determinação
de órbitas de satélites terrestres. O filtro de Kalman foi implementado na forma
fatorizada UD, em conjunto com uma técnica adaptativa para estimar o nível de ruído
dinâmico, a fim de prevenir a divergência das estimativas devido ao modelo impreciso
do movimento orbital. O filtro UD adaptativo se comportou de forma a contornar
problemas de modelagem e não permitir a ocorrência de divergência. O suavizador
UD foi usado para melhorar a precisão.
Nos trabalhos de Binning (1996, 1997) foram apresentados dois modos diferentes de
processamento dos dados do T/P. No primeiro modo, dados pós-processados do GPS
foram usados para estimar o estado do satélite, via suavizador; e, no segundo, os
parâmetros da navegação transmitida foram utilizados para estimar o estado do
satélite em tempo real simulado. A precisão da órbita é aferida comparando as
estimativas do filtro de Kalman com as efemérides de órbita precisa (POE), calculadas
pelo JPL (Jet Propulsion Laboratory). O modelo da dinâmica considerou perturbações
devidas ao geopotencial, à pressão de radiação solar, ao terceiro corpo e às marés
devidas à Lua e ao Sol. O modelo de atitude foi considerado, para remover os efeitos
do movimento da antena.
Em Chiaradia (2000) foi desenvolvido um algoritmo simplificado e compacto, com
baixo custo computacional, para DO de satélites artificiais em tempo real e a bordo,
através do sistema GPS. O vetor de estado foi estimado pelo filtro estendido de

6
Kalman (EKF). As equações de movimento consideraram perturbações devidas ao
geopotencial até grau e ordem 10. As pseudo-distâncias de única frequência foram
utilizadas como medidas de observação.
Galski (2002) e Galski et al. (2001) desenvolveram e analisaram um sistema
simplificado de determinação autônoma de órbitas de satélites artificiais, a bordo, via
GPS. Em uma primeira etapa foi desenvolvido e analisado um procedimento de
determinação autônoma de órbita, com o objetivo de refinar a solução geométrica
grosseira fornecida por receptores do sistema GPS através da utilização direta desta
solução como entrada para um processo de estimação de estado, em tempo real, via
filtro de Kalman. Em uma segunda etapa, as saídas refinadas desse processo foram
utilizadas na implementação de um sistema de controle autônomo do desvio de fase
no Equador da órbita do satélite.
Em Gomes (2004) foi proposto estimar, em tempo real, o vetor de estado orbital
composto de posição e velocidade através do processamento da solução de navegação
obtida pelo receptor a bordo. Foram determinadas tendência e deriva do relógio do
receptor GPS a bordo de satélites, utilizando o EKF como estimador.
Pardal (2008) determinou a órbita de um satélite artificial, utilizando sinais da
constelação GPS e o Método de Mínimos Quadrados Recursivo via ortogonalização
de Givens como técnica de estimação, com a finalidade de melhorar o desempenho de
processos de determinação de órbitas e, ao mesmo tempo, minimizar o custo do
procedimento computacional. O modelo dinâmico incluiu perturbações devidas ao
geopotencial até ordem e grau 50, à pressão de radiação solar direta e à atração
gravitacional luni-solar. Foi considerada a influência do movimento da atitude do
satélite no processo de DO.
Julier et al. (1995, 2000) e Julier e Uhlmann (1997, 2004) desenvolveram e
demonstraram um novo estimador linear recursivo para modelo dinâmico e modelo de
observações não lineares. Este método usa o princípio de que um conjunto de pontos
discretamente amostrados pode ser usado para parametrizar média e covariância de
uma distribuição de probabilidade (não necessariamente Gaussiana). Esta técnica leva
a um novo filtro: o chamado filtro de Kalman sigma-ponto (SPKF).

7
A família de algoritmos sigma-ponto, que representa uma nova abordagem, baseada
nos sigma-pontos, para calcular estatísticas posteriores de uma variável aleatória que
passa por uma transformação não linear, foi revisada em van der Merwe et al. (2004).
Estes algoritmos incluem variantes como o Filtro de Kalman “Unscented” (UKF) e o
Filtro de Kalman de Diferenças Centrais (CDKF).
Lee e Alfriend (2003, 2004) utilizaram uma generalização alternativa do EKF para
estimação recursiva robusta dos estados e parâmetros de um satélite orbitando a Terra.
O novo filtro não linear, SPKF, é baseado na transformação “unscented” e seu
desempenho na aplicação é melhor que a do EKF, com a mesma complexidade
computacional, e sem os onerosos passos de linearização para sistemas não lineares,
levando a uma convergência mais rápida e estável.
Um eficiente algoritmo de inicialização do filtro foi proposto por Lee e Alfriend
(2007). O método de Herrick-Gibbs foi usado para fornecer estado inicial e
covariância, mostrando vantagens dos filtros sigma-ponto em relação ao EKF na
estimação sequencial de órbita, com a mesma complexidade computacional.
O trabalho de Kuga et al. (2007) descreveu o alinhamento estático de uma IMU
(Inertial Measurement Unit) de baixo custo baseada na tecnologia MEMS (Micro
Electro-Mechanical System). Foi desenvolvido um filtro de Kalman não linear (UKF
na fase de propagação e o filtro de Kalman linearizado na fase de atualização) para
acompanhar, em tempo real, os parâmetros de calibração estimados, a fim de
minimizar os erros de navegação.
Embora todos os trabalhos acima citados tenham sido instrumentos de referência de
extrema valia para o desenvolvimento da tese de doutorado que se apresenta, os
principais trabalhos que nortearam o desenvolvimento da mesma foram os de: Julier
et al. (1995, 2000); Julier e Uhlmann (1997, 2004); van der Merwe et al. (2004); Lee e
Alfriend (2003, 2004); e Chiaradia (2000).
Na sequência, no Capítulo 3 é apresentada a metodologia utilizada para o
desenvolvimento da tese, enquanto os Capítulos 4, 5 e 7 englobam a revisão teórica
dos principais tópicos estudados durante a elaboração da tese. São eles: modelo da
dinâmica orbital; modelo das medidas usadas em DO; modelos dos principais efeitos

8
perturbadores que afetam a órbita do satélite T/P, utilizado como caso de teste nesta
tese; e técnicas de estimação, destacando, entre os estimadores aplicados a problemas
com características de tempo real o EKF e o UKF.

9
3 METODOLOGIA
Em missões espaciais, a DO permite o acompanhamento da espaçonave e, com isso, a
execução de todas as tarefas operacionais durante a sua vida útil. A DO adquire
destaque primordial na medida em que a precisão da mesma permite que algumas das
tarefas operacionais sejam executadas sem contratempos, evitando prejuízos para a
missão. O conhecimento preciso da órbita fornece informações valiosas acerca dos
desvios em relação à trajetória nominal da missão; permitindo correções de órbita,
manobras de transferência orbital e previsão de problemas com a espaçonave, como a
deterioração da missão e a redução do tempo de vida útil. Em trabalhos de precisão,
notadamente os científicos, o conhecimento preciso da órbita é fundamental em
campos da geodésia espacial, oceanografia do nível dos mares, modelagem da
dinâmica da crosta terrestre, topografia e relevo, melhoria dos coeficientes de
modelagem do geopotencial, entre outros.
No problema da DO de satélites artificiais separam-se dois aspectos: o determinístico,
que abrange a modelagem da dinâmica da órbita e a modelagem das observações que
serão utilizadas para DO; e o estocástico, que abrange a aplicação de métodos e
procedimentos da teoria de estimação de estados. Para obtenção de uma boa
eficiência, deve-se modelar o problema da forma mais adequada possível,
considerando os requisitos impostos a sua resolução. Nem sempre a modelagem
dinâmica sofisticada é a mais conveniente; muitas vezes o modelo pode ser
simplificado, reduzido ou descentralizado sem prejudicar o desempenho do
procedimento. Para a DO, uma simplificação comum é a adoção do movimento
kepleriano, que representa a maior parcela da magnitude das forças atuantes no
sistema. Deve-se ressaltar que modelos simplificados podem não ser suficientemente
precisos se as integrações ocorrerem por longos períodos, devendo-se compensar tais
erros com atualizações mais frequentes, via utilização de uma maior quantidade de
medidas a serem processadas pelo estimador de estados.
Caso não houvesse perturbações de qualquer natureza, a órbita de um satélite artificial
terrestre poderia ser modelada como um movimento kepleriano puro (problema de
dois corpos), em que somente a força central gravitacional age sobre ele. Esta força é
de maior magnitude que quaisquer outras forças perturbadoras atuantes e, neste caso
ideal, as equações do movimento seriam integráveis analiticamente, sem necessidade

10
de integrações numéricas. Excluindo-se esta força principal, existem diversas fontes
de perturbação sobre a órbita, tanto de origem conservativa como dissipativa, tais
como: geopotencial; arrasto atmosférico; pressão de radiação solar direta e indireta;
atração gravitacional luni-solar; e atração de marés terrestres e oceânicas.
Para se determinar uma órbita são necessárias informações obtidas através de medidas
direta ou indiretamente relacionadas com a posição e com a velocidade do satélite
(GOMES, 2004). Alguns tipos de medidas são direcionais e, em geral, medidas mais
precisas são coletadas por sistemas que medem características de propagação do sinal
eletromagnético entre transmissor e receptor, que podem estar baseados na Terra ou
no satélite. Um dos sistemas de grande potencial para DO de precisão e com
possibilidades de navegação autônoma é o sistema de posicionamento global GPS,
que fornece medidas com precisão métrica ou milimétrica, dependendo da abordagem
adotada para solucionar o problema.
Estas medidas devem passar por um processamento de dados adequado.
Invariavelmente, recorre-se a métodos estatísticos embasados em teorias de estimação
de parâmetros e de estado. Estes métodos acomodam a modelagem da dinâmica da
órbita e das medidas, considerando o aspecto estatístico dos erros e dos ruídos
sistemáticos e aleatórios envolvidos nas equações que regem o movimento orbital e as
observações a serem processadas.
O problema de determinação de órbita é não linear e, no caso desta tese, será utilizado
um algoritmo não linear, com características de tempo real, para obter o vetor de
estado a ser estimado.

11
4 TÉCNICAS DE DETERMINAÇÃO DE ÓRBITA DE SATÉLITES
ARTIFICIAIS
4.1 Modelagem da Dinâmica Orbital
Para se obter uma boa eficiência no problema de DO de satélites artificiais, deve-se
modelar o problema da forma mais adequada possível e que atenda os requisitos
impostos a sua missão. Nem sempre a modelagem dinâmica mais sofisticada é a mais
adequada, pois comumente requisitos de processamento em tempo real, ou quase real,
e memória limitada, estão presentes. Muitas vezes o modelo pode ser simplificado ou
reduzido sem prejudicar o desempenho do procedimento. No caso específico de DO,
uma simplificação comum é a adoção do modelo que representa a maior parcela de
magnitude das forças atuantes no sistema: o movimento kepleriano (KUGA, 2001).
Caso não houvesse perturbações de qualquer natureza, a órbita de um satélite artificial
terrestre poderia ser modelada como um movimento kepleriano puro, em que somente
a força central gravitacional age sobre o veículo espacial. Porém, no caso de satélites
artificiais terrestres, existem diversas fontes de perturbação sobre suas órbitas, tanto
gravitacionais como não gravitacionais, tais como: geopotencial, arrasto atmosférico,
pressão de radiação solar direta e indireta, atração gravitacional luni-solar, efeito de
marés, etc. Tais perturbações podem afetar os chamados elementos keplerianos que
representam a órbita do satélite.
O problema de DO de satélites artificiais terrestres é essencialmente não linear, de
tratamento matemático complexo e agravado pelo fato de o satélite sofrer influência
de perturbações gravitacionais e não gravitacionais. O processo dinâmico (movimento
orbital) mais simples é descrito por equações diferenciais ordinárias vetoriais:
vr =& (4.1)
war
v ++=3r
-µ& (4.2)
definidas em relação ao sistema de referência inercial. Nas Eq. 4.1 e 4.2, r representa
o vetor contendo as componentes de posição (x, y, z), com 222 zyxr ++= ; v , o
vetor contendo as componentes de velocidade; w , o vetor ruído branco com média

12
zero e covariância Q; e a , o vetor de perturbações modeladas. No equacionamento do
estimador de estado, define-se o estado, x, como:
≡
v
rx (4.3)
As Eq. 4.1 e 4.2 podem ser escritas como segue:
( ) ( )tt)t( ,, nmm xfxfx +=& (4.4)
em que mf é a função vetorial que expressa a modelagem adotada no estimador e nmf é
a função vetorial que expressa a parcela não modelada.
As equações de estado consideradas são:
zx
yx
xx
zx
yx
xx
6
5
4
3
2
1
&
&
&
===
⇒
===
=+==
=+==
=+==
=========
6333
6
5232
5
4131
4
363
252
141
far
x-zx
far
x-yx
far
x-xx
fxzx
fxyx
fxxx
µ
µ
µ
&&&
&&&
&&&
&&
&&
&&
(4.5)
O vetor a ser estimado compõe-se de:
[ ]T654321 x x x x xx=x (4.6)
com a condição inicial 0x modelada como um vetor aleatório, normalmente
distribuído.
4.2 Modelagem das Medidas Usadas em Determinação de Órbita
Para se determinar uma órbita são necessárias informações sobre ela. Tais
informações são obtidas através de medidas que direta ou indiretamente se relacionam
com posição e velocidade do satélite. Alguns tipos de medidas são direcionais,

13
medindo os ângulos de apontamento de uma antena de rastreio localizada em local
conhecido que identificam a trajetória do satélite. Em geral, medidas mais precisas
são coletadas por sistemas que medem características da propagação do sinal
eletromagnético entre transmissor e receptor, que podem estar baseados tanto em
Terra quanto no satélite. Em geral, as medidas podem ser obtidas de medidas de
antenas de radar e de medidas baseadas em satélites.
As observações de antenas de radar baseadas em Terra, normalmente utilizadas em
sistemas de determinação de trajetória, podem ser métricas ou angulares.
Existem também medidas baseadas em satélites. Neste caso, os satélites de um
sistema de posicionamento são os meios externos utilizados para coletar dados que
fornecem informações sobre a trajetória do satélite cuja órbita deve ser determinada.
Um dos sistemas de grande potencial para DO de precisão e com navegação autônoma
é o sistema de posicionamento global GPS. A referência Parkinson e Spilker (1996) é
uma das mais completas em relação ao sistema GPS.
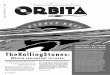
O segmento espacial do GPS consiste de uma constelação nominal de 24 satélites
operacionais e mais três satélites mantidos como reserva, conforme a Figura 4.1. Um
receptor GPS embarcado em um satélite usuário do sistema, ao receber o sinal,
compara-o com uma réplica do sinal codificado gerado pelo satélite GPS, e determina
a diferença entre o instante de chegada (recepção) e o de transmissão do sinal. Este
tipo de observação chama-se pseudo-distância. Outra observação consiste na chamada
fase da portadora, que é uma medida definida como a diferença entre a fase da
portadora do satélite GPS recebida pela antena do receptor e a fase do oscilador
interno do receptor na época da medida. A ideia de utilização das medidas de fase
para a determinação de órbitas justifica-se pela estabilidade das fases e pela precisão
na sua medida. Medidas de fase, basicamente, consistem da mesma quantidade que a
pseudo-distância, com duas diferenças distintas: são cerca de 100 vezes mais precisas;
e têm um desvio de relógio arbitrário resultante de um número desconhecido de ciclos
inteiros entre o transmissor e o receptor. A principal dificuldade de utilização deste
tipo de medida é a resolução da ambiguidade N (o número de ciclos não lidos no
instante da sincronização dos sinais) e produz impacto direto na precisão da medida.

14
Figura 4.1 - Constelação GPS.
4.3 Técnicas de Estimação
O objetivo de um estimador de estado é calcular estimativas de um vetor de estado
com base em um conjunto de observações, de modo que a estimativa obtida seja ótima
segundo um dado critério. Em outras palavras, é um algoritmo computacional que
processa medidas para produzir uma estimativa, de erro mínimo, do estado de um
sistema utilizando conhecimentos da sua dinâmica, da modelagem das medidas, das
estatísticas do erro do modelo dinâmico do sistema e das medidas, além de
informações da condição inicial.
Para se determinar uma órbita é necessário o processamento dos dados coletados.
Invariavelmente recorrem-se a métodos estatísticos embasados em teorias de
estimação de parâmetros e de estado. Estes métodos acomodam a modelagem da
dinâmica da órbita, a modelagem das medidas e também levam em conta o aspecto
estatístico de erros e de ruídos sistemáticos e aleatórios.
Os métodos determinísticos são pouco utilizados já que a precisão obtida é pobre para
propósitos científicos e tecnológicos. Em geral, baseiam-se no modelo gravitacional
dos dois corpos e em um conjunto limitado de medidas para cálculo da órbita. Podem
ser utilizados para determinação preliminar de órbita, por exemplo, na fase de
lançamento, ou para obter a estimativa inicial de órbita a ser posteriormente refinada
pelos métodos estatísticos.

15
No processo de estimação existem dois métodos básicos para obtenção do vetor de
estado: estimador por lotes e estimador sequencial. O estimador é dito por lotes
quando o vetor de estado é atualizado em um instante de referência ou época, usando
um bloco de observações obtido durante um intervalo de tempo. Destaca-se aqui o
método de mínimos quadrados por lotes. No estimador sequencial o vetor de estado é
atualizado após cada observação ser processada. Exemplos típicos são os métodos de
mínimos quadrados recursivo e o filtro de Kalman.
4.3.1 Estimadores de Tempo Real
Estes são os estimadores cujas aplicações são prioritariamente em casos nos quais há
necessidade de processamento em tempo real. Eles devem, intrinsecamente, ser
algoritmos recursivos e produzir sequencialmente estimativas do estado e/ou de
parâmetros do sistema. Dentre estes, destacam-se o filtro de Kalman convencional e
suas variantes numericamente robustas.
O filtro de Kalman é um dos estimadores recursivos mais usados atualmente por ser
de fácil implementação e utilização em computador. Por ser recursivo, há uma
economia de memória de armazenamento, já que as observações podem ser
processadas à medida que vão sendo coletadas e, então, descartadas. Este fato o torna
ideal para aplicações em tempo real, caso em que iterações sobre o total de
observações não precisam ser realizadas e a convergência é obtida à medida que certa
quantidade de observações é processada.
4.3.1.1 Filtro de Kalman
Na DO de satélites artificiais, em geral a dinâmica e as medidas são não lineares e,
portanto, para se aplicar o filtro de Kalman, é geralmente feita uma linearização em
torno de uma solução de referência. O filtro de Kalman é reconhecido como uma das
técnicas de estimação de estado mais poderosas. Há dois métodos básicos para a
aplicação do filtro de Kalman em sistemas não lineares: o filtro linearizado de Kalman
e o filtro estendido de Kalman.
O Filtro Linearizado de Kalman gera uma trajetória de referência válida do início ao
fim do processo de estimação e as linearizações são sempre efetuadas em torno dessa

16
referência. Já o Filtro Estendido de Kalman (EKF), uma versão do filtro de Kalman
para sistemas não lineares, gera trajetórias de referência que são atualizadas a cada
processamento das medidas, a partir das próprias estimativas geradas pelo filtro, no
instante correspondente (BROWN e HWANG, 1985).
Se o modelo da dinâmica de estado é bastante preciso, pode-se utilizar o filtro
linearizado, desde que a informação a priori seja próxima dos valores verdadeiros, de
modo que as linearizações sejam válidas. Caso contrário, se o modelo é impreciso e
simplificado, é preferível o filtro estendido, que converge atualizando sempre a
trajetória de referência.
O filtro de Kalman apresenta vantagens e desvantagens (PAIVA, 1988 e KUGA,
1989):
A utilização do filtro de Kalman reduz a carga de processamento por não
requerer reiterações do processo para resolução das não linearidades;
É útil para processamento a bordo de veículos espaciais porque, ao contrário
dos estimadores por lotes, não precisa iterar sobre dados previamente
observados (minimizando a necessidade de armazenagem) e é frequentemente
capaz de estimar o estado atual em tempo real;
O tempo de execução requerido pelo filtro de Kalman depende da
complexidade dos cálculos necessários para atualizar as matrizes de transição
de estado e de covariância do ruído no estado;
Está frequentemente sujeito ao problema de divergência, que ocorre quando o
estado estimado se desvia do estado verdadeiro.
Filtro Estendido de Kalman
Devido à complexidade de modelar a dinâmica da órbita de um satélite artificial com
precisão, o EKF é geralmente utilizado em trabalhos desta natureza. O algoritmo do
filtro estendido atualiza sempre a trajetória de referência em torno da estimativa mais
atual disponível.
Este filtro consiste em fases de propagação e de atualização. Na primeira, a estimativa
atual do estado e a respectiva matriz de covariância são propagadas do instante tk-1 ao
tk e; na segunda, estado e covariância são corrigidos para o instante tk, de modo a

17
incorporar informações contidas na observação yk. Esse método tem, portanto,
natureza recursiva e não necessita armazenar as medidas previamente em grandes
matrizes.
Fase de propagação: utilizada para propagar as estimativas do estado e a covariância
entre instantes discretos através do modelo dinâmico do sistema. As equações
utilizadas nesta fase são:
ΓQΓφPφP
xfx
kkkkkkkk
kk
+=
=
−−−
−
T1,11,
1
ˆ~
)ˆ(~&
(4.7)
sendo kx~ e kP~
o estado e a covariância propagados para o instante tk; ϕϕϕϕ a matriz de
transição que relaciona o estado entre os instantes tk-1 e tk; kQ a covariância da
dinâmica; e Tkkk ΓQΓ a matriz de adição do ruído dinâmico dada por:
∫−
−−= k
1k
t
t 1TT
1 )dtt,(t(t)(t)(t))t,(t kkkkkkk φGQGφΓQΓ (4.8)
em que (t)G é uma matriz de adição do ruído dinâmico.
Fase de atualização: utilizada somente para corrigir o estado e a covariância
propagada para o instante tk na fase de propagação, incorporando as informações
contidas na observação correspondente a esse instante, yk, através do modelo de
observações. A cada instante de amostragem, as medidas do instante tk fornecem
informação para corrigir o estado e a covariância. Nesta fase, as equações são dadas
por:
1)
~(
~ −+= kTkkk
Tkkk RHPHHPK
kkkk PHKIP~
)(ˆ −= (4.9)
( )kkkkkk xHyKxx ~~ˆ −+=
em que K k é o ganho de Kalman; x e P são o estado e a covariância atualizados para
o instante tk; Rk é a matriz de ruídos das observações; e Hk é um matriz m×n que
relaciona as medidas aos elementos do estado no instante tk.

18
O EKF propaga recursivamente a estimativa do estado 1ˆ −kx e da covariância 1ˆ
−kP , de
um dado sistema dinâmico, para o instante tk. Depois, com auxílio das medidas
geradas no instante tk, ele atualiza as estimativas do vetor de estado e da covariância.
A atualização é realizada através da matriz de ganho de Kalman, resultado da
minimização da soma escalar ponderada dos elementos da diagonal principal da
matriz de covariância. Em outras palavras, o filtro estendido de Kalman tem uma
estrutura preditora-corretora e se baseia na expansão em Série de Taylor do sistema
não linear e das equações das medidas em torno do valor estimado atualizado x .

19
5 FILTROS DE KALMAN DO TIPO SIGMA-PONTO
Os filtros de Kalman do tipo sigma-ponto utilizam uma nova abordagem do filtro de
Kalman, para dinâmica e modelo de medidas não lineares, baseada em um conjunto
de amostras ponderadas, com a finalidade de parametrizar média e covariância de uma
distribuição de probabilidade. Tal abordagem será aqui discutida.
5.1 Introdução
Quando a dinâmica do sistema e o modelo de observações são lineares, o filtro de
Kalman pode ser amplamente empregado no processo de estimação. Todavia, na
maioria das situações, os sistemas dinâmicos e as equações das medidas são não
lineares e convenientes extensões do filtro de Kalman têm sido procuradas. A solução
ótima para o problema de filtragem não linear exige que uma descrição completa da
densidade de probabilidade condicional seja mantida. Infelizmente, como esta
descrição exata requer um número potencialmente ilimitado de parâmetros,
aproximações sub-ótimas têm sido propostas. Estes métodos podem ser amplamente
classificados como métodos numéricos de Monte Carlo ou aproximações analíticas.
No entanto, a aplicação destes métodos para sistemas de alto grau raramente é prática.
O filtro de Kalman do tipo Sigma-Ponto (“Sigma-Point”) é um novo estimador que
permite desempenho equivalente ao do filtro de Kalman convencional (sistemas
lineares) e se estende elegantemente a sistemas não lineares, sem os onerosos passos
de linearização.
5.2 Os Filtros da Família Sigma-Ponto
A família de algoritmos sigma-ponto representa uma abordagem geral, baseada nos
sigma-pontos, para calcular estatísticas posteriores de uma variável aleatória que
passa por uma transformação não linear. Estes algoritmos incluem variantes
específicas, como o Filtro de Kalman “Unscented” (UKF) e o Filtro de Kalman de
Diferenças Centrais (CDKF). O UKF é baseado em uma transformação não linear,
chamada transformação “unscented”, em que um conjunto de amostras ponderadas
ou sigma-pontos é usado para parametrizar eficientemente a média e a covariância de
uma distribuição de probabilidade. Já o CDKF utiliza um método de linearização
alternativo, chamado transformação de diferença central, em que as derivadas são

20
substituídas por estimações funcionais, permitindo uma expansão fácil de funções não
lineares para termos de mais altas ordens. Este filtro não é abordado neste trabalho.
A abordagem do filtro sigma-ponto é descrita em 3 passos (van der MERWE et al.,
2004):
1. Um conjunto de amostras ponderadas é deterministicamente calculado, com
base na média e na decomposição de raiz quadrada da matriz de covariância de
uma variável aleatória anterior. Uma exigência mínima é que os momentos de
primeira e de segunda ordem da variável aleatória anterior sejam
completamente capturados. Momentos de ordem superior podem ser
capturados, se desejado, ao custo de um número maior de sigma-pontos.
2. Os sigma-pontos são propagados através da verdadeira função não linear,
usando estimações funcionais somente, ou seja, derivadas analíticas não são
usadas para gerar um conjunto posterior de sigma-pontos.
3. As estatísticas posteriores são calculadas utilizando funções manejáveis dos
sigma-pontos propagados e de seus respectivos pesos. Em geral, elas assumem
a forma de uma simples média ponderada da média e da covariância de uma
variável aleatória, anteriormente calculadas.
A seguir, o UKF é explicado detalhadamente, em função de ser o método de
estimação escolhido para aplicação neste trabalho. Tal escolha deu-se,
essencialmente, por este filtro manter as características não lineares da dinâmica e das
medidas durante o processamento de filtragem, sem utilizar métodos de linearização.
5.3 O Filtro de Kalman “Unscented”
A componente fundamental deste filtro é a transformação “unscented”, que usa um
conjunto de pontos ponderados, escolhidos apropriadamente, para parametrizar média
e covariância da distribuição de probabilidade. Nesse método, a matriz Jacobiana
(matriz de derivadas parciais que torna a linearização do EKF possível) não necessita
ser calculada, explícita ou implicitamente, o que se torna uma grande vantagem da
transformação. Com disso, o algoritmo resultante representará mais fielmente a média
e a covariância do sistema não linear.

21
5.3.1 Transformação “Unscented”
A transformação “unscented” calcula as estatísticas de uma variável aleatória que
passa por uma transformação não linear. Um conjunto mínimo de amostras é gerado
em torno da média x e da covariância Pxx do estado (JULIER e UHLMANN, 1997),
de forma a ser representativo do sistema não linear. Em seguida, todas as amostras
geradas são propagadas não linearmente, obtendo estatísticas de média y e de
covariância Pyy preditas das medidas, a partir de uma nuvem de pontos transformados.
Neste método, as amostras não são tomadas aleatoriamente; elas são escolhidas
deterministicamente, de forma a capturar informação específica sobre a distribuição.
Esta ideia pode ser aplicada a diferentes espécies de informação, de muitos tipos de
distribuição. No entanto, aqui se considera um caso especial: capturar média e
covariância de uma distribuição assumida gaussiana.
A variável aleatória x , n-dimensional, sendo n o tamanho do estado, com média x e
covariância Pxx é aproximada por 2n + 1 sigma-pontos ponderados do nℜ , dados por:
( )( )
ini
ii
n
n
xx
xx
Px
Px
x
χ
χ
χ
)(
)(
0
κ
κ
+−=
++=
=
+
(5.1)
em que ℜ∈κ , ( )i
n xxP)( κ+ é a i-ésima linha ou coluna, i = 1, ..., n, da matriz raiz
quadrada de xxP)( κ+n . Sejam os valores associados ao peso do i-ésimo ponto, iW ,
definidos por:
( )
( )
( ) njn
W
nin
W
nW
nj
i
,,1,2
1
,,1,2
1
0
K
K
=+
=
=+
=
+=
+ κ
κ
κκ
(5.2)

22
Então a transformação ocorre da seguinte forma:
1. Usa-se a transformação não linear para produzir um conjunto de sigma-pontos
transformado, a partir de cada ponto:
[ ]iiy χh= (5.3)
2. A média das observações é dada pela média ponderada dos pontos
transformados:
∑=
=n
iii yW
2
0
y (5.4)
3. A covariância é o produto ponderado dos pontos transformados:
[ ][ ]∑=
−−=n
iiiiyy yyW
2
0
TyyP (5.5)
As propriedades do algoritmo são apresentadas resumidamente abaixo (JULIER e
UHLMANN, 1997):
1. Desde que a média e a covariância de x sejam capturados precisamente até a
segunda ordem, os valores calculados de média e de covariância de y estarão
corretos até esta ordem. Em outras palavras, a média é calculada para uma
ordem de precisão superior ao EKF, enquanto a covariância é calculada para a
mesma ordem de precisão.
2. Os sigma-pontos capturam a mesma média e covariância, sem restrição em
relação a matriz de raiz quadrada utilizada. Métodos numericamente eficientes
e estáveis podem ser usados, como a decomposição de Cholesky.
3. A média e a covariância são calculados através de operações clássicas de
vetores e de matrizes, ou seja, o algoritmo é ajustável a qualquer escolha de
processo e a implementação é rápida em razão de não se calcular a matriz
Jacobiana.
4. O fator κ fornece um grau de liberdade a mais, para o “ajuste fino” dos
momentos de ordens superiores, e pode ser usado para reduzir os erros de
predição. Se x é uma variável gaussiana, é útil escolher ( ) 3=+ κn (JULIER

23
et al., 1995); e se x tiver uma distribuição diferente, a escolha de κ deve ser
mais adequada.
5.3.2 Filtro de Kalman “Unscented”
Com a utilização da transformação “unscented”, o algoritmo do filtro de Kalman
consiste agora nos seguintes passos, mostrados primeiramente na Figura 5.1, e
explicados em seguida.
Figura 5.1 - Filtro de Kalman modificado, gerando o UKF.
Os passos detalhados na Figura 5.1 são explicados abaixo:
1. Predizer o novo estado do sistema ( )kk |1ˆ +x e sua covariância associada
( )kkxx |1+P , levando em conta os efeitos do ruído gaussiano branco do
processo.
2. Predizer a observação esperada ( )kk |1ˆ +y e a covariância de resíduos
(inovação) ( )kk |1+ννP , levando em conta os efeitos do ruído da observação.

24
3. Predizer a matriz de correlação cruzada ( )kkyx |1+P .
Estes passos são acomodados no filtro de Kalman com a reestruturação do vetor de
estado, do vetor de observações e do modelo da dinâmica:
As matrizes na diagonal principal de ( )kkxx |1+P são as covariâncias dos elementos
do estado e, as fora dela, as correlações entre os erros da dinânima do estado e os
ruídos das observações. Embora este filtro exija um número adicional de sigma-
pontos, com isto pretende-se que os efeitos do processo gaussiano (em termos do
impacto da média e da covariância) sejam introduzidos no estado com a mesma ordem
de precisão que as incertezas.
Existem várias extensões e modificações que podem ser feitas a este método básico
para considerar detalhes específicos de uma dada aplicação. Lü et al. (2007), por
exemplo, apresentam duas formas de implementar o UKF, utilizando a decomposição
de Cholesky e a decomposição modificada de Cholesky para atualizar a covariância,
possibilitando a tais implementações ter boa estabilidade numérica.
5.4 Comparação entre EKF e UKF
Os filtros não lineares convencionais, tais como o filtro linearizado ou estendido de
Kalman, por vezes têm um desempenho pobre face a problemas não lineares, devido a
duas conhecidas desvantagens:
A linearização (dos modelos dinâmico e de medidas) pode levar a um
desempenho altamente instável do filtro se o intervalo do passo não for
suficientemente pequeno;
A derivação da matriz Jacobiana não é trivial na maioria das aplicações e,
usualmente, leva a dificuldades de implementação.
O UKF é mais vantajoso, quando comparado ao EKF, nos seguintes aspectos (LEE e
ALFRIEND, 2004):

25
1. Permite estimativas mais estáveis e precisas de média e de covariância;
2. Pode estimar funções que apresentem descontinuidades;
3. Não necessita linearizar o sistema dinâmico ou, em outras palavras, desobriga
o cálculo da matriz Jacobiana (matriz de derivadas parciais que torna a
linearização do EKF possível);
4. É ajustável a processamento paralelo.
5.5 Aplicações
O processo de estimação de um estado por meio do UKF é um método que pode ser
amplamente empregado, especialmente para sistemas cuja dinâmica e modelo de
medidas são não lineares. Em relação a este método, vários trabalhos podem ser
encontrados na literatura. As diferenças entre eles estão baseadas essencialmente nas
escolhas de modelos de sistema dinâmico e tipos de medidas.
Podem ser elencadas algumas aplicações, como estimação de: parâmetros e estado
não lineares; sistemas não contínuos no tempo; posição baseada no sistema GPS;
incertezas das medidas; atitude (incluindo quatérnios); e bias de sensores. No
concernente à navegação, tem-se as opções: via GPS; integrada; inercial; via GPS
com integridade em aviação; de espaçonaves, na reentrada ou não. Pode ainda ser
aplicado em reconstrução de trajetória de vôo, combinado com a tecnologia MEMS e
em predição e estimação sequencial de órbita.
Uma discussão de desenvolvimento de determinação de órbita (incluindo predição e
estimação sequencial), com características de tempo real, através do UKF, será
mostrada no Capítulo 6 a seguir.

26

27
6 APLICAÇÃO DO UKF PARA DETERMINAÇÃO DE ÓRBITA COM
CARACTERÍSTICAS DE TEMPO REAL
No EKF, a distribuição do estado é suposta ser normal e este é modelado por uma
variável gaussiana aleatória, que é propagada analiticamente através da linearização
de primeira ordem do sistema não linear. Isto introduz erros na média e na covariância
reais posteriores da variável gaussiana aleatória transformada, levando a desempenhos
sub-ótimos e, algumas vezes, à divergência do filtro (WAN e van der MERWE,
2000).
No UKF, a distribuição do estado também é aproximada por uma variável gaussiana
aleatória, porém é representada por um mínimo de pontos amostrados, que são
cuidadosamente escolhidos, de forma a capturar a média e a covariância da referida
variável. Quando pontos amostrados são propagados através do sistema não linear
verdadeiro, a média e a covariância posteriores podem ser capturadas com precisão,
para a terceira ordem da expansão em Série de Taylor, para qualquer sistema não
linear.
A implementação do EKF em DO, sob condições iniciais de pouca precisão e com
medidas de dados esparsas, pode levar a solução instável. O UKF pode representar
uma alternativa eficiente para estimação recursiva não linear do estado de um satélite
em órbita ao redor da Terra.
6.1 Utilização do UKF em Determinação de Órbita
Primeiramente, algumas observações devem ser feitas acerca da DO, do modelo
dinâmico e do modelo de observações:
1. A determinação de órbita será feita com base no sistema GPS, cujo princípio
de funcionamento baseia-se no método geométrico, em que o observador
conhece a posição de um conjunto de satélites em relação a um referencial
inercial e a sua posição em relação a este conjunto, obtendo sua própria
posição no sistema de referência. A Figura 6.1 apresenta os parâmetros básicos
utilizados pelo sistema GPS na determinação da posição do usuário em que
ur é a posição do satélite usuário em relação ao sistema inercial;iGPSR é a

28
posição do i-ésimo satélite GPS; e iρ é a pseudo-distância, posição do usuário
em relação ao i-ésimo satélite (VILHENA DE MORAES et al., 1994):
Figura 6.1 - Método Geométrico
Fonte: Chiaradia, 2000.
2. No caso de DO via GPS, as equações diferenciais ordinárias vetoriais que
representam o modelo dinâmico são (KUGA, 1989):
vr =& (6.1)
vwar
v ++=3r
-µ& (6.2)
db =& (6.3)
dwd =& (6.4)
em que as Equações 6.1 e 6.2 são equivalentes às Equações 4.1 e 4.2,
respectivamente; b representa a tendência do relógio GPS; d, a deriva do
relógio GPS, ambos do satélite usuário; e dw , o ruído associado ao relógio
GPS.

29
3. A equação não linear do modelo de observações é dada por:
( ) , kkkk νxhy += t (6.5)
em que ky é o vetor de m observações; ( )kxh é a função não linear de
dimensão m do estado kx ; e kν é o vetor de dimensão m dos erros da
observação. Todos calculados no instante tk.
Contextualizado o problema de DO que se pretende estimar através do UKF, é
possível apresentar uma discussão sobre o assunto.
Os passos da transformação “unscented” para gerar o UKF são acomodados no filtro
de Kalman (Seção 5.3.2). No equacionamento do estimador de estado, o vetor de
estado original, no instante k, é dado por:
=
k
k
k
k
k
d
b
v
r
x (6.6)
O vetor de estado poderia incorporar também o vetor de ruídos dinâmicos kw , de
dimensão q×1, e kυ , o ruído do processo branco gaussiano, que representa o erro da
observação, de dimensão l×1. Em consequência, a matriz de covariância aumentada
teria na diagonal principal Qk, a matriz de covariância do ruído da dinâmica, e kR , a
covariância do erro da observação. O novo vetor de estado teria dimensão
l q n na ++= (LEE e ALFRIEND, 2007). Como, neste problema específico, os
ruídos entram de forma aditiva tanto na equação da dinâmica quanto na equação das
observações, não será necessário trabalhar com o vetor de estado aumentado.
Tendo-se definido composição e dimensão do vetor de estado, o UKF pode então ser
implementado. O passo de propagação se divide em duas etapas:

30
1. Gerar o conjunto de sigma-pontos do estado:
+−=
=
++=
=
−−−+
−−−
−−
111,
111,
11,0
ˆ)(ˆ
...,,1,ˆ)(ˆ
ˆ
kkkni
kkki
kk
n
nin
Px
Px
x
χ
χ
χ
λ
λ (6.7)
a partir da média, 1ˆ −kx , e da matriz de covariância, 1ˆ
−kP , referentes ao instante
anterior, tk-1. Nas Equações 6.7, ( ) nn −+= καλ 2 , sendo que α controla o
espalhamento dos sigma-pontos em torno da média 1ˆ −kx e é escolhido
usualmente pequeno, no intervalo 110 4 ≤≤− α (JWO e LAI, 2008); κ fornece
um grau de liberdade a mais, que é usado para o “ajuste fino” dos momentos
de ordens superiores (se a distribuição é gaussiana, tem-se n−= 3κ (JULIER
et al., 1995)); e i
kn
+ −1
ˆ)( Pλ é a i-ésima linha ou coluna da matriz raiz
quadrada de ( ) 1ˆ
−+ kn Pλ .
2. Propagar o conjunto de sigma-pontos do estado gerado para o instante tk, a
partir da função não linear da dinâmica:
[ ]
[ ]
[ ]1,,
1,,
1,0,0
−++
−
−
=
=
=
knikni
kiki
kk
χχ
χχ
χχ
f
f
f
(6.8)
e, em seguida, com os sigma-pontos propagados através da função da
dinâmica, calcular a média e a covariância preditas:
[ ] [ ] kkki
n
ikkiik
n
ikiik
W
W
QxxP
x
χχ
χ
+−−=
=
∑
∑
=
=
T
,
2
0,
2
0,
(6.9)

31
A fase de atualização (correção da medida) se divide em mais quatro etapas:
1. Gerar o conjunto de sigma-pontos das observações:
+−=
=
++=
=
+ kkkni
kkki
kk
n
nin
Px
Px
x
χ
χ
χ
)(
,...,,1,)(
,
,
,0
λ
λ (6.10)
propagar os sigma-pontos das observações através da função não linear das
observações:
][
[ ]
[ ]knikni
kiki
kk
y
y
y
,,
,,
,0,0
++ =
=
=
χh
χh
χh
(6.11)
e calcular ky , a média dos sigma-pontos de observação propagados:
∑=
=n
ikiik yW
2
0,y (6.12)
2. Calcular as matrizes de inovação, vvkP , e de correlação, yx
kP , preditas:
[ ] [ ]
[ ] [ ]T,
2
0,
T,
2
0,
y
yy
kki
n
ikkii
yxk
kkki
n
ikkii
vvk
y
yy
W
W
−−=
+−−=
∑
∑
=
=
xP
RP
χ
(6.13)
3. Calcular o ganho de Kalman, kK , com base nas matrizes de inovação e de
correlação determinadas na etapa nº 2 anterior:
( ) 1−= νν
kyx
kk PPK (6.14)

32
4. E, finalmente, atualizar o estado, kx , e a matriz de covariância, kP :
( )
Tˆ
yˆ
kkkkk
kkkkk
KK
K
ννPPP
yxx
−=
−+=
(6.15)
sendo ky o vetor de observações efetivamente medido no instante tk.
O processo se repete, a partir da Equação 6.7, o primeiro passo da etapa de
propagação, para o próximo instante, tk+1. A média e a covariância do estado
atualizadas no instante atual tk serão usadas para gerar, deterministicamente, os sigma-
pontos do próximo instante.
6.2 Resultados: Algoritmo do UKF Implementado para Determinação de
Órbita
Os resultados para o desenvolvimento e a implementação de um filtro de Kalman
sigma-ponto não linear, baseado na transformação “unscented”, com o objetivo
específico de determinar a órbita de um satélite artificial em tempo real e usando
medidas GPS, são apresentados aqui.
O algoritmo é simples, compacto e resulta em um estimador recursivo de baixo custo
computacional, o que o torna ideal para aplicações de tempo real. O modelo dinâmico
inclui perturbações devidas ao geopotencial até ordem e grau 10×10. As medidas de
pseudo-distância, de frequência L1, são usadas como vetor de observações. Não
houve correção ionosférica no período de testes e os dados foram utilizados sem
disponibilidade seletiva. Todos os resultados foram obtidos para um longo período de
24 horas de amostragem, referentes ao dia 05/01/1994, data da qual há disponíveis os
arquivos do POE/JPL, usados como referência para determinar os erros dos resultados
obtidos.
Inicialmente, foi implementado o conceito do UKF na fase de propagação do processo
de estimação, utilizando o EKF na fase de atualização. Em seguida, o UKF foi
implementado na fase de atualização, mantendo o EKF na propagação. Por último, o
algoritmo do UKF foi completamente implementado, substituindo o EKF nas fases de

33
propagação e de atualização. Esta foi a primeira vez, até onde se tem informação, que
resultados de DO, utilizando o conceito do UKF e o processamento de dados reais
pelo filtro, foram apresentados (PARDAL et al., 2009, 2009(a)).
Estes três estágios foram comparados entre si e também foram comparados aos
resultados para o EKF (PARDAL et al., 2009, 2009(a)). Para avaliação do algoritmo
do UKF, foi implementado um algoritmo do EKF simplificado e compacto, de baixo
custo computacional, para DO de satélites artificiais em tempo real e a bordo, usando
o sistema GPS. Este algoritmo funcionou como referência de avaliação dos resultados
obtidos através do UKF no decorrer do desenvolvimento da tese e foi utilizado ainda
para gerar os resultados obtidos através do EKF nesta tese, feitas as modificações
adequadas a cada etapa da tese. O vetor de estado foi estimado pelo EKF e as
equações da dinâmica consideraram perturbações devidas ao geopotencial até grau e
ordem 10 (CHIARADIA, 2000).
As Figuras 6.2 e 6.3 apresentam os módulos dos erros em posição e em velocidade (∆r
e ∆v) para as implementações através do UKF e do EKF. Os resultados dos estágios
intermediários (implementação do UKF apenas na fase de propagação ou apenas na
fase de atualização), como apresentaram o mesmo comportamento dos algoritmos que
implementam o EKF e o UKF completos (nas fases de propagação e de atualização),
serão mostrados apenas por meio das Tabelas 6.1 e 6.2. Na Figura 6.4 são
apresentados os resíduos de pseudo-distância obtidos com o UKF como estimador.
Como pode ser verificado através das referidas tabelas, o comportamento dos resíduos
para o EKF e para os estágios intermediários é praticamente o mesmo que o do UKF.
Com relação aos erros em posição e em velocidade, as Figuras 6.2 e 6.3 indicam que o
UKF atinge valores RMS em torno de 29 m em posição e 0,04 m/s em velocidade, o
mesmo acontecendo com o EKF. A Tabela 6.1 mostra que o UKF implementado
apenas na propagação e o implementado apenas na atualização atingem os mesmos
valores de RMS para os erros em posição e em velocidade. Isto leva a concluir que os
comportamentos de posição e de velocidade são similares nas quatro implementações.
Os valores estatísticos são apresentados em termos do RMS porque seu cálculo
envolve a média e o desvio padrão através de 22 )padrãodesvio()média(RMS +≈ ,
o que auxilia verificar se a consistência estatística está sendo atingida.

34
De acordo com a Figura 6.4, os resíduos de pseudo-distância apresentam uma
distribuição normal, com RMS próximo de 22 m para um período de 24 horas. E,
conforme a Tabela 6.1, fica claro que os resíduos nas quatro implementações são
muito parecidos, com comportamento e estatísticas bastante similares.
UKF - Geo 10x10 - dia 05/01/1994
0.001
0.01
0.1
1
10
100
1000
0 2 4 6 8 10 12 14 16 18 20 22 24
tempo, [h]
erro
s
r_est, [m] r_real, [m]
v_est, [m/s] v_real, [m/s]
Figura 6.2 - Erros reais e estimados em posição e velocidade para o dia 05/01/1994 – implementação pelo UKF.
EKF - Geo 10x10 - dia 05/01/1994
0.001
0.01
0.1
1
10
100
1000
0 2 4 6 8 10 12 14 16 18 20 22 24
tempo, [h]
erro
s
r_est, [m] r_real, [m]
v_est, [m/s] v_real, [m/s]
Figura 6.3 - Erros reais e estimados em posição e velocidade para o dia 05/01/1994 – implementação pelo UKF.

35
UKF - Geo 10x10 - dia 05/01/1994
-100
-75
-50
-25
0
25
50
75
100
0 2 4 6 8 10 12 14 16 18 20 22 24
tempo, [h]
resí
duos
, [m
]
Figura 6.4 - Comportamento típico dos resíduos da pseudo-distância – implementação pelo UKF.

36
Tabela 6.1 - Estatíticas dos quatro estimadores implementados
RMS
Estimador ∆∆∆∆r (m) ∆∆∆∆v (m/s) resíduos (m)
UKF 29,548 0,0412 22,477
UKF - atualização 29,547 0,0412 22,477
UKF - propagação 29,562 0,0411 22,443
EKF 29,561 0,0411 22,443
Nas Figuras 6.2 e 6.3, os erros reais em posição e em velocidade (curvas vermelha e
cinza) estão abaixo dos erros estimados pelos filtros (curvas azul e verde), o que
indica consistência estatística. Todos os estimadores levaram cerca de 1 hora para
atingir valores de convergência.
Ao comparar os resultados obtidos para UKF completamente implementado, UKF
implementado na atualização, UKF implementado na predição e implementação
completa via EKF, todos resumidos na Tabela 6.1, pode-se concluir que para estes
intervalos de amostragem e para as condições deste problema de DO, os quatro
algoritmos são competitivos e apresentam comportamento e estatísticas muito
semelhantes, conforme destacado na Tabela 6.1. É importante ressaltar que todos os
resultados foram obtidos para dados reais de um receptor GPS a bordo do satélite T/P,
ou seja, dados simulados não foram usados.
Os resultados indicam que a transformação “unscented” introduzida na fase de
propagação, e em sequência na fase de atualização do filtro, foi bem sucedida, uma
vez que o comportamento dos resultados continuou muito semelhante ao dos
resultados obtidos com o EKF.
Um outro teste foi feito: comparação em termos de custo de tempo de processamento.
O tempo de CPU foi medido em um computador Pentium 4 ® com 3,06 GHz e 1,00
GB de memória RAM. Havia 2880 épocas no intervalo de amostragem, o que
significa uma nova amostra a cada 30 segundos. O número médio de medidas GPS,

37
por época, foi 5,7, o que significa que foram processadas quase 6 observações de
satélites GPS a cada época.
O tempo de CPU foi aumentando à medida que o EKF era substituído pelo UKF,
como pode ser conferido na Tabela 6.2. A implementação pura do EKF levou cerca de
1 s para estimar o estado; em seguida, a substituição apenas da parcela de propagação
pelo UKF levou cerca de 2 s; depois, somente a parcela de atualização foi substituída
pelo UKF levou em torno de 3,5 s; e, por último, a implementação completa do UKF
precisou de quase 5 s para processar as medidas e estimar o vetor de estado para o
problema de DO, com medidas reais de satélites GPS.
Tabela 6.2 - Comparação de custo de tempo de processamento
Estimador tempo de CPU (s)
UKF 4,828
UKF - atualização 3,469
UKF - propagação 2,281
EKF 0,938
Neste problema, 2n + 1 sigma-pontos, sendo n o número de variáveis do estado, foram
gerados a partir da média e da covariância iniciais. Este é o procedimento utilizado
pela família de algoritmos SPKF para gerar os sigma-pontos. Devido a isso, era
esperado que o tempo de CPU fosse cerca de 16 vezes maior no UKF que no EKF, já
que neste problema específico o estado tem dimensão n = 8 e cada sigma-ponto é um
vetor de dimensão 2n + 1. Na realidade, o tempo de CPU efetivamente aumentou, mas
cerca de 5 vezes, de 0,938 s no processamento do EKF para 4,828 s no do UKF, ao
invés das 16 vezes esperadas. Estes valores, mostrados na Tabela 6.2, fornecem
evidências de que o tempo de CPU não é diretamente proporcional ao aumento na
dimensão do estado causado pela geração do conjunto de sigma-pontos.
Esta etapa do desenvolvimento da tese de doutorado teve como objetivo implementar
corretamente o algoritmo do UKF para o problema específico de DO com
características de tempo real e dados reais GPS. Para tanto, foi escolhida a mais
simples modelagem dinâmica: perturbações devidas ao geopotencial somente até

38
ordem e grau 10. E, para verificar se a implementação estava correta, escolheu-se
comparar os resultados com uma referência: o EKF aplicado ao mesmo problema,
sujeito ao mesmo modelo dinâmico. É importante destacar que nestes resultados
preliminares, pontos importantes foram atingidos na implementação do algoritmo do
UKF, como convergência e consistência estatística entre valores estimados e erros.
Tendo-se constatado que convergência e consistência estatística foram alcançadas, é
possível agora concentrar esforços em diminuir os erros entre o estado estimado pelo
filtro e a referência do POE/JPL. Na realidade, sabe-se que só se conhecem os erros
estimados, da covariância do filtro. No entanto, como existem disponíveis arquivos do
estado real do satélite, é possível se basear nesta referência de erro para verificar se os
passos propostos para melhoria dos resultados foram eficientes. Em outras palavras, à
medida que as novas ações propostas forem sendo executadas, mais efetivas elas serão
quanto menor for o erro real resultante.
Buscando a melhoria dos resultados, o que se traduz em menores erros entre o estado
estimado pelo filtro e o estado real de referência do POE/JPL, o próximo passo
consiste em melhorar a precisão do modelo dinâmico adotado, aumentando a ordem
dos harmônicos do geopotencial considerados e incluindo novas perturbações. Neste
modelo dinâmico, para DO com características de tempo real, serão ainda incluídas a
pressão de radiação solar direta e a atração gravitacional luni-solar, preponderantes no
modelo do T/P, o satélite de teste deste trabalho.
Os resultados serão apresentados para os dois estimadores, UKF e EKF, já que os
novos resultados obtidos pelo UKF devem sempre ser comparados a uma referência,
no caso o mesmo problema de DO estimado por um filtro amplamente empregado e
cujos resultados são aceitos e conhecidos: o EKF.

39
7 MODELO DE FORÇAS
Caso não houvesse perturbações de qualquer natureza, a órbita de um satélite artificial
terrestre poderia ser modelada como um movimento kepleriano puro, em que somente
a força central gravitacional age sobre o veículo espacial. As órbitas elípticas fixas
fornecem referências excelentes para estudo do movimento de um satélite artificial.
No entanto, outras forças agem no mesmo, perturbando seu movimento e afastando-o
de sua órbita nominal (kepleriana). As perturbações são normalmente classificadas em
três tipos: perturbações seculares, que variam linearmente no tempo; perturbações de
curto período, cujo período de variação é menor ou igual ao período orbital; e
perturbações de longo período, que tem período maior que o período orbital.
No caso de satélites artificiais terrestres, existem diversas fontes de perturbação sobre
suas órbitas, tanto gravitacionais como não gravitacionais, tais como: geopotencial,
arrasto atmosférico, pressão de radiação solar direta e indireta, atração gravitacional
do Sol e da Lua, efeito de marés, etc. Tais perturbações podem afetar os chamados
elementos keplerianos que representam a órbita do satélite. A seguir, será feita uma
breve discussão das principais perturbações a serem consideradas neste trabalho:
perturbações devidas a não esfericidade da Terra, considerando harmônicos de alto
grau e ordem; pressão de radiação solar direta; e atração gravitacional luni-solar.
7.1 Perturbações Devidas ao Campo Gravitacional Terrestre
O campo gravitacional terrestre e a força de atração associada a este campo, exercida
sobre uma massa nele colocada, sendo esta qualquer massa que possa ser
negligenciada, serão estudados no caso de um satélite artificial. O campo
gravitacional terrestre apresenta uma das principais perturbações nos movimentos dos
satélites artificiais, devido a sua não esfericidade. O termo principal devido ao
achatamento da Terra é J2 (KAULA, 2000), sendo os demais termos considerados
dependendo da precisão da missão.
No estudo do problema de dois corpos, a Terra é considerada com distribuição de
massa homogênea e simetria esférica. No entanto, na realidade, a Terra não é uma
esfera perfeita com distribuição de massa homogênea e, neste contexto, não pode ser
considerada como um ponto material, devido ao achatamento nos pólos e à forma

40
irregular da sua composição, fato que tem efeito direto na distribuição de sua
densidade. Estas irregularidades produzem perturbações na órbita de um satélite
artificial, causando alterações nos elementos keplerianos que descrevem a órbita.
Como já foi dito, a distribuição de massa não é homogênea, sendo sua forma
levemente achatada nos pólos e bojuda no Equador. Para a Terra esférica, a função
potencial gravitacional é dada por r
µ
r
GMU == e o módulo da força gravitacional
específica é dado por 2r
µ-
dr
dUF == . No caso real, a função potencial é bem mais
complexa (KAULA, 2000):
( )( )λλφµλφ mSmCPr
R
rrU nmnmnm
n
n
n
m
sencossen),,(0 0
T +
= ∑∑∞
= = (7.1)
em que
µ... constante gravitacional da Terra;
RT... raio médio da Terra;
r... distância radial do veículo espacial;
φ... latitude geocêntrica;
λ ... longitude nas coordenadas fixas da Terra;
Cnm, Snm... coeficientes esféricos harmônicos normalizados, de grau n e
ordem m;
Pnm... funções de Legendre associadas normalizadas, de grau n e
ordem m.
As constantes µ, RT, Cnm, Snm definem um potencial gravitacional específico. As
funções associadas de Legendre são dadas por (BUTKOV, 1988):
( ) ( )nmn
mn
nnmd
d
nP 1sen
sen!2
1sen 2 −= +
+φ
φφ (7.2)

41
O geopotencial também pode ser representado por:
( ) ( )nmnmn
n
mnmn
mPJr
U λλφµ −= ∑∑∞
= =+ cossen
0 01
(7.3)
com nmnmnm JSC ≡+ 22 , em que Jnm e nmλ são constantes que dependem da
distribuição de massa da Terra.
7.1.1 Modelo de Geopotencial Considerado
A assimetria de distribuição de massa da Terra, que gera as perturbações devidas ao
geopotencial, é modelada por coeficientes de harmônicos esféricos, normalmente
obtidos através da redução de medidas de satélites. O primeiro modelo foi o GEM10,
que continha cerca de 450 coeficientes. Este tipo de modelagem causa um alto custo
computacional, diretamente proporcional a quanto mais complexo e completo for o
conjunto de coeficientes harmônicos.
O modelo gravitacional JGM-2 é uma atualização do modelo JGM-1, desenvolvido
pela NASA/GSFC (NASA’s Goddard Space Flight Center) e pela Universidade do
Texas. O modelo JGM-1 foi desenvolvido antes do lançamento T/P como resultado de
um esforço de vários anos para melhorar o modelo gravitacional terrestre através de
uma nova versão de dados de rastreamento de 30 satélites, dados de altímetro do
SEASAT e do GEOSAT e medidas gravitacionais diretas na superfície da Terra. O
modelo JGM-2 é resultado de um ajuste do JGM-1, depois do lançamento do T/P,
pela inclusão de 150 dias das observações rastreadas do satélite. O modelo JGM-2 foi
usado para calcular as órbitas da primeira geração do T/P. Atualmente, este modelo
foi atualizado pelo JGM-3, que representa um ajuste superior ao do JGM-2, pela
inclusão de mais dados rastreados do T/P e, especialmente, pela inclusão de 40 dias de
rastreamento do GPS.
Para o T/P, o erro radial global da órbita, devido aos erros em JGM-2, é estimado em
2 cm RMS. A Tabela 7.1 mostra os principais parâmetros do modelo.

42
World Geodetic System – WGS-84
O WGS-84 é um conjunto de parâmetros, estabelecido pela Agência de Mapeamento
de Defesa dos Estados Unidos, para determinar uma relação geométrica e física em
uma escala global. O sistema inclui um elipsoide de referência geocêntrico, um
sistema de coordenadas e um modelo de campo gravitacional. O sistema de
coordenadas é uma conversão do sistema terrestre convencional, como estabelecido
pelo IERS. Desde 1987, a descrição das órbitas dos satélites GPS na mensagem de
navegação é referida neste sistema (LANGLEY, 1995). A Tabela 7.1 traz os
principais parâmetros que definem este sistema.
O sistema WGS-84 é baseado no campo gravitacional de ordem e grau 180.
Tabela 7.1 - Principais parâmetros do modelo JGM-2 e do sistema WGS-84
Parâmetro Símbolo JGM-2 WGS-84
Semi-eixo maior, m a 6.378.136,3 6.378,137
Achatamento f 563298,2572231 563298,257223
1
Velocidade angular, rad/s ωe 7,2921151467 ⋅ 10-5 7,2921151467 ⋅ 10-5
Constante gravitacional, m3/s2 µ 398.600,4415 ⋅ 109 398.600, 5 ⋅ 109
2º harmônico zonal 0,2C -484,16548 -484,16685
7.2 Perturbações Devidas à Pressão de Radiação Solar
A pressão de radiação solar é uma força de origem não gravitacional que perturba o
movimento translacional de um satélite artificial (EL’YASBERG, 1967). Sua função
perturbadora pode ser representada através do gradiente do potencial (EL-ENNA,
2003, 2004; EL-SAFTAWY e EL-ENNA, 2002), porém quando o efeito da sombra da
Terra é considerado, esta representação deixa de ser válida, pois a força não deriva
mais de um potencial.
A pressão de radiação solar é gerada através do contínuo fluxo de fótons que se
chocam com a superfície do satélite, podendo esta absorver ou refletir este fluxo. A
taxa da quantidade de movimento de todos os fótons incidentes na superfície do

43
satélite origina a força de pressão de radiação solar, podendo causar perturbações nos
elementos orbitais.
A sua variação é praticamente independente da altitude do satélite: começa a
predominar sobre a força aerodinâmica a partir dos 700 km e tem influência acentuada
nos satélites de órbita alta, como, por exemplo, os satélites geoestacionários
(aproximadamente 40.000 km de altitude). A importância das forças não
gravitacionais aumentou drasticamente devido ao aumento da precisão na localização
e devido à importância da precisão no planejamento de missões espaciais.
Pressão de radiação solar é uma quantidade vetorial definida pela razão entre força e
elemento de superfície/área deste elemento. Isto é, as perturbações devidas à pressão
de radiação solar dependem da área da seção A do satélite e de sua massa m, sendo tão
mais importante quanto maior for a relação mA , e sendo o Sol a principal fonte de
energia radiante para veículos espaciais dentro do sistema solar. A energia radiante é a
energia de um fóton, que vale fE νh= , em que h é a constante de Planck e fν , a
frequência de um fóton.
O momento (quantidade de movimento) fµ de um fóton é dado por
luz da velocidade
áreatempofluxo ⋅⋅==c
Eµ f . Portanto:
luzdavelocidade
fluxo
áreatempopressão =
⋅= fµ
Ou seja, a pressão de radiação solar depende do fluxo de fótons incidentes na área da
seção do satélite. Como a pressão de radiação é produzida por fluxos de radiação
incidente e refletida, a sua magnitude depende substancialmente do mecanismo de
reflexão desta radiação.
A maneira como as perturbações devidas à pressão de radiação solar afetarão os
elementos keplerianos depende do modelo de pressão adotado (se considera ou não a
sombra, por exemplo). No entanto, no caso geral, ela causa perturbações seculares e
periódicas nas variáveis angulares (Ω, ω, M) e perturbações periódicas nas variáveis
métricas (a, e, i) da órbita.

44
As componentes da força de pressão de radiação solar podem ser expressas em
diversos sistemas. Através desses sistemas relacionam-se os elementos orbitais do
satélite com a posição do Sol. Este procedimento foi o utilizado neste trabalho, no
modelo de pressão de radiação solar considerado para o T/P, mostrado na sequência.
7.2.1 Modelo Específico de Pressão de Radiação Solar Direta para o T/P
O modelo de forças descreve o movimento do satélite em relação ao seu centro de
massa, mas raramente as distâncias são medidas em relação a este ponto. No caso do
T/P, as medidas dos satélites GPS são tomadas a partir da localização do centro da
antena. Por esta razão é importante o conhecimento acerca da atitude do satélite. A
Figura 7.1 mostra a antena do T/P em relação ao restante da espaçonave.
Figura 7.1 - Satélite TOPEX/Poseidon
Fonte: Marshall e Luthcke (1994).
O T/P possui um sistema de controle de atitude bastante complexo em função do seu
grande e único painel solar. O apontamento solar perfeito (vetor de incidência do Sol
perpendicular ao painel solar) exigiria que a espaçonave fizesse uma guinada (“yaw”)
em torno de seu eixo z, o qual aponta para a Terra, a uma taxa que excede a
capacidade do sistema de controle de atitude. Consequentemente, foi desenvolvido
um comando de atitude senoidal que chega muito perto do apontamento solar perfeito
e não extrapola os limites do sistema de controle de atitude.
O algoritmo de controle de atitude é baseado no sistema de coordenadas fixo no corpo
(xB, yB, zB), cuja origem é no satélite, embora não coincida com o seu centro de massa,
com o eixo positivo yB apontando em sentido oposto ao eixo do painel solar, o eixo

45
positivo zB apontando na direção do Nadir terrestre e o eixo positivo xB ortogonal a yB
e a zB, completando o sistema destrógiro. O sistema de referência orbital (xO, yO, zO)
tem sua origem no centro de massa do satélite, sendo que o eixo positivo zO coincide
com o eixo zB do sistema fixo no corpo, o eixo positivo yO aponta no sentido oposto
ao vetor momento angular da órbita e o eixo xO é ortogonal a yO e a zO, formando o
sistema destrógiro. Este sistema de coordenadas fixo na órbita também pode ser
descrito como um sistema de referência RTN (radial, transversal, normal), em que a
componente radial corresponde ao Nadir (aponta para a Terra), a normal é
perpendicular ao plano da órbita e a transversal é ortogonal às outras duas
componentes. O sistema de referência da órbita (X, Y, Z) tem o eixo positivo X
perpendicular à órbita do satélite, o eixo positivo Z apontando na direção da projeção
do vetor incidente do Sol na órbita do satélite e o eixo positivo Y perpendicular a
estes eixos. A Figura 7.2 mostra β’ , o ângulo entre o vetor de incidência do Sol e o
plano da órbita, e Ω*, o ângulo de órbita, medido a partir do eixo positivo Y, que se
situa a um ângulo correspondente a 6 horas da manhã na órbita.
Figura 7.2 - Sistema de coordenadas de referência do T/P, os ângulos Ω* e β’ .
Fonte: Modificado de Marshall et al. (1991).

46
O T/P possui um único painel solar que, para alcançar o apontamento solar perfeito,
exige do satélite uma guinada em torno do eixo zB. Para realizar esta guinada, o
satélite possui um complicado sistema de controle de atitude, como já foi dito.
Considerando a influência da pressão de radiação solar direta na órbita do satélite, foi
desenvolvido o modelo de Marshall e de Luthcke (1994), que se baseia em dois
sistemas de coordenadas: o fixo no satélite (xB, yB, zB) e o de referência para o satélite
(X, Y, Z).
Foi desenvolvido um modelo chamado de macromodelo e mostrado na Figura 7.3, a
fim de aproximar os perfis de aceleração. O modelo escolhido é no formato “box-
wing” (caixa e asa), aproximando as superfícies do satélite por uma combinação de
placas planas alinhadas ao longo do sistema de coordenadas fixo no satélite,
produzindo carga computacional menor e permitindo sua incorporação em softwares
de DO.
Figura 7.3 - Macromodelo de Marshall e Luthcke.
Fonte: Marshall e Luthcke (1994).
Após aproximar a forma do satélite por placas planas, este macromodelo foi
computado com as forças não conservativas (no caso do modelo, forças de radiação)
atuando independentemente em cada placa e desconsiderando quaisquer efeitos de
interação em cada uma das superfícies compostas, tais como sombreamento, reflexão
e condução. Isto permite que todas as acelerações sejam somadas para calcular o
efeito total de perturbação no centro de massa do satélite.
Seguindo o macromodelo proposto por Marshall e Luthcke, a força kF atuando na k-
ésima placa é dada por (MARSHALL e LUTHCKE, 1994):

47
( )
−+
+= snc
GAkkk
kkkk
)) ρθρδθ1cos
32
cosF (7.4)
sendo:
G ... fluxo de radiação do Sol (W/m2);
Ak ... área superficial da k-ésima placa (m2);
δ ... coeficiente de reflexão difusa (porcentagem da radiação total
incidente);
ρ ... coeficiente de reflexão especular (porcentagem da radiação total
incidente);
n)
... versor normal à placa;
s)
... versor de incidência do Sol na placa;
θ ... ângulo formado entre n)
e s)
;
c ... velocidade da luz (m/s);
E, calculando a força de pressão de radiação solar agindo em cada uma das placas,
tem-se a força total atuando no centro de massa do satélite:
∑=
=8
1kkFF (7.5)
7.3 Perturbações Devidas à Atração Gravitacional Luni-Solar
O Sol e a Lua são responsáveis por perturbações nas órbitas de satélites artificiais
terrestres. Essas perturbações são devidas à força de atração do Sol e da Lua e podem
ser significativas se o satélite estiver muito afastado da Terra. Como as variações
orbitais são do mesmo tipo, quer o corpo atraente seja o Sol quer seja a Lua, podem
ser estudadas sem particularizar o terceiro corpo.
A atração gravitacional luni-solar não apresenta variações seculares nos elementos
orbitais e, a e i. Ela atua principalmente em Ω e ω, o que acarreta precessão do plano
da órbita.
Neste trabalho, é usada uma simplificação do problema geral de três corpos em que se
supõe a existência de dois corpos M1 e M2 de massas finitas m1 e m2, respectivamente.

48
Deseja-se então estudar o movimento de um terceiro corpo cuja massa pode ser
negligenciada e que orbita o sistema formado pelos dois outros corpos (SZEBEHELY
e MARK, 1967).
Existem diferentes versões do Problema Restrito de Três Corpos, conforme a
modelagem adotada. No caso deste trabalho, adotou-se a mais simples de todas, o
problema restrito-plano-circular de três corpos, que pode ser assim enunciado:
“Deseja-se conhecer o movimento de um terceiro corpo M3, de massa infinitesimal,
em torno de um sistema composto por M3 e dois outros corpos M1 e M2, com massas
finitas m1 e m2. Considera-se que apenas forças gravitacionais atuem no sistema, que
as órbitas de M1 e M2 em torno do centro de massa sejam circulares e que M3 se
mova apenas no plano das órbitas de M1 e M2”.
A equação de movimento para esta versão, que fornece a aceleração sofrida pelo
corpo M3 no referencial inercial, 3r&& , pode ser expressa por (PRADO e KUGA, 2001):
323
2323
13
1313
rr
rrr GmGm −−=&& (7.6)
em que 1313 rrr −= , 2323 rrr −= e 3,2,1, =iir é a distância do i-ésimo corpo ao
centro de massa do sistema.

49
8 AJUSTES NECESSÁRIOS PARA APLICAÇÃO DOS ALGORITMOS D O
EKF E DO UKF AO PROBLEMA DE DETERMINAÇÃO DE ÓRBITA
Para que o EKF e o UKF sejam aplicados no processo de estimação do vetor de
estado que caracteriza a órbita de um satélite artificial, é necessário que algumas
adaptações sejam feitas, especificando as equações do modelo dinâmico e do modelo
de observações que serão implementadas, de acordo com a abordagem adotada por
cada estimador.
8.1 Aplicação do Algoritmo do EKF em DO
O EKF consiste em fases de propagação e de atualização, genericamente apresentadas
no Capítulo 4, por meio das Equações 4.7 e 4.9. As equações diferenciais ordinárias
que representam o modelo dinâmico já foram apresentadas no Capítulo 6 e aqui são
reapresentadas:
vr =&
vwar
v ++=3r
-µ&
db =&
dwd =&
O estado é, conforme dito anteriormente, descrito através de uma parcela de forças
modeladas, mf , que inclui as equações do movimento e dos efeitos perturbadores que
interferem na órbita do satélite, e de uma parcela de forças não modeladas, mnf ,
composta por todos os ruídos e erros associados à dinâmica do movimento:
)t,()t,()t( xfxfx nmm +=& (8.1)
Para que o EKF possa ser aplicado corretamente no processo de estimação d, é
necessário linearizar a parcela modelada do modelo dinâmico:
xFxfxf ∆+= )t,()t,( mm (8.2)

50
em que xxx −=∆ ; x é o ponto em torno do qual a linearização é feita; e F
representa a matriz Jacobiana, composta pelas derivadas parciais de primeira ordem
de uma função vetorial. A matriz Jacobiana do sistema pode ser assim representada:
xxx
fF
=∂∂
= m (8.3)
e, já estando ajustada à função vetorial do modelo que descreve a dinâmica de DO,
pode ser expressa detalhadamente da seguinte forma:
=
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
= ××
××
0000
1000
00
00
d
d
b
dddd
b
b
bbbdb
db
3333
3333
0A
I0
vr
vr
vvvv
rv
rrvr
rr
F
&&&&
&&&&
&&&&
&&&&
(8.4)
em que 33×0 representa uma matriz quadrada nula de ordem 3; 33×I , uma matriz
identidade de ordem 3; e 33×A , uma matriz quadrada de ordem 3 composta pelas
derivadas parciais da equação vetorial da dinâmica em relação aos elementos do
estado, dada por:
,
z
f
y
f
x
fz
f
y
f
x
fz
f
y
f
x
f
666
555
444
33
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=×A (8.5)
sendo if , a aceleração do movimento perturbado (composição do movimento
kepleriano com as perturbações considerados no modelo dinâmico adotado)
relacionado com cada componente xi do estado, i = 1, 2, 3, podendo ser expressas da
seguinte forma:

51
333
6
232
5
131
4
ar
xf
ar
xf
ar
xf
+−=
+−=
+−=
µ
µ
µ
em que ai a parcela da aceleração devida às perturbações que afetam a órbita relativa à
componente xi do estado, i = 1, 2, 3; e a , o vetor composto pelos efeitos incluídos no
modelo de forças, que neste caso englobam geopotencial, aceleração gravitacional
luni-solar e pressão de radiação solar direta, representados, respectivamente, pelas
siglas GEOa , AGLSa e PRSda . O vetor de perturbações a é definido como
PRSdAGLSGEO aaaa ++= , em que:
( )( )
( )∑
∑∑
=
∞
= =
−+
+==
−−=
+
=−=
8
1PRSdPRSdPRSd
323
2323
13
131AGLS
0 0
TGEO
1cos3
2cos
,1
rr
sencossenrr
),,r(,d
d1
kkkk
kkk
nmnmnm
n
n
n
m
snc
GA
m
GmGm
mSmCPR
UU
m
)) ρθρδθ
λλφµλφ
FFa
rra
ra
Da mesma forma, o modelo não linear de observações ( ) kkkk νxhy += t, ,
apresentado na Equação 6.5, precisa ser linearizado. A função não linear da
observação é modelada através da medida de pseudo-distância:
v)(cρ iii +++−+= TROPION DDdTdtP (8.6)
em que ( ) ( ) ( )222 ZzYyXx iiiiρ −+−+−= representa a distância geométrica; c , a
velocidade da luz; IOND , os desvios ionosféricos; TROPD , os desvios troposféricos; e
v , a parcela dos erros não modelados.
A linearização é aplicada à parcela modelada da função vetorial que descreve o
modelo de observações, para a medida do instante tk, e processada da seguinte forma:

52
kk νxHy +∆=∆ (8.7)
sendo xxx −=∆ ; x o ponto em torno do qual a linearização é feita; e H a matriz que
define a linearização, dada por:
xxxh
H=∂
∂= (8.8)
Esta matriz, de acordo com a Equação 8.6 não linear do modelo de observações, fica
assim definida, após a linearização:
∆−−−= 1t000
ZzYyXx
i
i
i
i
i
i
ρρρH (8.9)
O EKF, portanto, para poder ser eficientemente aplicado em problemas não lineares,
como o é a DO, necessita linearizar quaisquer modelos não lineares (neste caso, tanto
o que descreve a dinâmica quanto o que descreve as observações). E, para efetuar o
processo de linearização, é necessário construir a matriz Jacobiana das derivadas
parciais de primeira ordem da função vetorial, tanto da dinâmica quanto das
observações. Neste ponto, tornam-se claras as complicações em se utilizar o EKF em
problemas não lineares, uma vez que quanto mais complexos os modelos que definem
o movimento dinâmico e as medidas, mais moroso se torna o processo de construção
da matriz Jacobiana. Por esta razão, métodos alternativos têm sido procurados, com o
intuito de facilitar o processo de estimação de estado de sistemas não lineares, sem
perder precisão e confiabilidade.
A seguir será mostrada a abordagem que o UKF utiliza para estimar o estado do
problema não linear específico de DO, descartando o uso do recurso de linearização e
se baseando na geração dos sigma-pontos.

53
8.2 Aplicação do Algoritmo do UKF em DO
O UKF consiste em fases de propagação e de atualização, detalhadamente
apresentadas no Capítulo 6. As equações diferenciais ordinárias que representam o
modelo dinâmico são as mesmas reapresentadas na Seção 8.1, com o estado
igualmente composto por uma parcela de forças modeladas e outra de forças não
modeladas, de acordo com a Equação 8.1.
A partir deste ponto surgem as diferenças de abordagem entre o EKF e o UKF, pois
ao invés de linearizar a parcela não linear de forças modeladas, o UKF utiliza a
própria função não linear, substituindo o vetor de estado x pelos sigma-pontos do
estado, 1−kχ , gerados a partir da média e da covariância das variáveis de estado, como
mostrado nas Equações 6.8. Assim, no UKF:
( )kkm ,1)t,( −= χfxf (8.10)
e a única alteração necessária para aplicação do filtro é a geração do conjunto de
sigma-pontos.
Da mesma forma, o modelo não linear de observações ( ) kkkk νxhy += t, ,
apresentado na Equação 6.5, não precisa ser linearizado. A função não linear da
observação é modelada através da medida de pseudo-distância (Equação 8.6) e, para
aplicação do UKF, basta substituir o vetor de estado do instante tk, kx , pelos sigma-
pontos das observações, kχ , gerados a partir da média e da covariância das variáveis
de estado propagadas na fase de predição do UKF, como mostrado nas Equações 6.10.
Assim, na equação não linear da dinâmica, basta efetuar a seguinte modificação:
( ) ( )kkkkk , t, χhxh = (8.11)
O UKF, portanto, para poder ser eficientemente aplicado em problemas não lineares,
como é o problema de DO, necessita gerar dois conjuntos de sigma-pontos, um de
estado e outro de observação, propagando-os diretamente através das equações não
lineares da dinâmica e das medidas, respectivamente. E, embora gerar os sigma-
pontos seja um processo moroso, é bem menos complicado que calcular as derivadas

54
parciais que compõem a matriz Jacobiana, havendo inclusive estudos para diminuição
do número de sigma-pontos gerados de 2n + 1 para n+ 1 pontos (JULIER e
UHLMANN, 2002). Isto significa que, do ponto de vista da geração dos sigma-
pontos, existe a possibilidade de tornar o processo menos dispendioso do ponto de
vista do tempo e do custo de processamento, ao passo que, em relação à matriz
Jacobiana, nada pode ser feito para melhorar o processo nestes quesitos. Assim,
tornam-se claras as simplificações quando se utiliza o UKF em problemas não
lineares, por não necessitar construir a matriz Jacobiana e permitir a estimação de
estado de sistemas não lineares sem perda de precisão, de robustez e de
confiabilidade.

55
9 RESULTADOS
Neste Capítulo serão apresentados os resultados obtidos com a melhoria de precisão
do modelo Neste Capítulo serão apresentados os resultados obtidos com a melhoria de
precisão do modelo dinâmico. Os resultados das análises foram confrontados com a
referência POE/JPL do T/P. Posteriormente, os resultados destes erros foram levados
do sistema de referência para o sistema orbital, ou sistema RTN (radial, transversal,
normal), em que a componente radial aponta para o Nadir terrestre, a normal é
perpendicular ao plano da órbita (oposto ao vetor momento angular da órbita) e a
transversal é ortogonal às outras demais componentes, sendo a componente da
velocidade. Assim, é possível analisar diretamente o que ocorre nas componentes
orbitais e, consequentemente, o que ocorre na evolução da órbita, ao invés de analisar
o que ocorre do ponto de vista de um referencial na Terra, visto que nesta situação há
maior dificuldade de visualização.
Para verificar se o modelo havia sido efetivamente melhorado, foi feita uma análise de
propagação de órbita, na qual o filtro é desligado no algoritmo de DO. Com isso,
consegue-se isolar os efeitos das perturbações inseridas no modelo dinâmico. Nesta
configuração do algoritmo, não ocorreu correção de qualquer natureza em função das
medidas GPS usadas como vetor de observação.
Quando o EKF foi utilizado como estimador de estado, decidiu-se implementar a
matriz Jacobiana completa das derivadas parciais das acelerações decorrentes das
perturbações, implementando as derivadas analiticamente calculadas, sem qualquer
aproximação. Com isto, a comparação entre EKF e UKF quanto ao custo do tempo de
processamento tornou-se mais justa. Isto porque, se o UKF usa o modelo não linear,
sem linearizações (portanto sem a matriz de derivadas parciais) e substitui cada
elemento do estado por um vetor de 2n +1 sigma-pontos, para uma boa comparação,
dever-se-ia compará-lo ao EKF na situação em que este calcula a matriz Jacobiana
completa, sem aproximações.

56
9.1 Descrição dos Dados Utilizados
Para validar e analisar o método proposto, dados reais do satélite T/P foram utilizados.
O T/P foi lançado em 10 de agosto de 1992, pela união de esforços entre a NASA e o
CNES. Algumas de suas características orbitais são: altitude aproximada de 1336 km;
inclinação de 66º; excentricidade próxima de zero; e período orbital nominal de 1,87
horas. O T/P possui um receptor GPS a bordo como experimento, para verificar os
vários métodos propostos para DO, translação de coordenadas geodésicas, nível dos
oceanos e modelos de geopotencial. Este receptor pode rastrear até seis satélites em
ambas as frequências se o “anti-spoofing” (A-S) estiver inativo. O A-S constitui a
capacidade de negar aos usuários não militares os sinais GPS com códigos precisos
(P-code), modulados nas frequências L2 e L5 e, assim, manter os códigos militares
em sigilo.
O receptor GPS de dupla frequência a bordo permite testar a habilidade do sistema
GPS em proporcionar determinação precisa de órbita (POD). Os arquivos utilizados
são (CHIARADIA et al., 2000 (a)):
a) Arquivos de observação: transmitem o código e as medidas de pseudo-
distância em duas frequências, com passo de tempo GPS de 10 segundos e são
apresentados pelo GPS Data Processing Facility do JPL em formato RINEX
(Receiver Independent Exchange Format) (GURTNER, 1994);
b) Arquivos POE: gerados pelo JPL em passo de tempo UTC de 1 minuto, em
coordenadas inerciais verdadeiras da data;
c) Arquivos de mensagem de navegação GPS em formato RINEX:
apresentados pelo CDDIS (Crustal Dynamics Data Information System) do
GSFC.
A posição e a velocidade estimadas neste trabalho, para teste da metodologia em
análise, são comparadas com as efemérides de órbita precisa do T/P. Os arquivos de
referência do POE/JPL apresentam estimativas de posição com erros de no máximo
15 cm (BERTIGER et al., 1994), obtidas através de modelos complexos envolvendo
estações GPS terrestres, efemérides precisas dos satélites GPS e dados e modelos de
elevada dificuldade de obtenção, fora do objetivo do presente trabalho.

57
As condições de teste consideram dados reais de pseudo-distância, coletados pelo
receptor GPS a bordo do satélite, no dia 19 de novembro de 1993.
O vetor de estado e a matriz de transição (esta apenas para o EKF) são integrados
utilizando o algoritmo de Runge-Kutta de Fehlberg de sétima ordem, com intervalo de
integração de 10 segundos, passo fixo e controle de erro.
A modelagem das forças inclui perturbações devidas ao geopotencial no máximo até
grau e ordem 28, com coeficientes harmônicos do modelo JGM-2, à atração
gravitacional luni-solar e à pressão de radiação solar direta (somente para o UKF). As
medidas GPS (pseudo-distância) de única frequência L1 são utilizadas como medidas
de observação e corrigidas com relação ao atraso dos relógios dos satélites GPS e do
receptor. O modelo das medidas não considera a correção ionosférica, visto que não
há melhoria significativa na precisão em posição e em velocidade quando da sua
inclusão (CHIARADIA et al. 2000(b)).
No período compreendido entre 17/11/1993, 12:00:00 UTC, e 19/11/1993, 00:00:00
UTC, os satélites GPS encontravam-se com disponibilidade seletiva (SA) desativada.
Se a SA estiver ativada, significa que aos sinais GPS públicos, disponíveis para
navegação, podem ser adicionados, intencionalmente, erros variando até 100 m.
Segundo Binning (1997(a)), a SA estava desativada para 18 dos 25 satélites GPS. Os
satélites com SA desativada eram dois do bloco I (PRNs 3, 13), seis do bloco II
(PRNs 14, 15, 16, 17, 20, 21) e dez do bloco II-A (1, 2, 5, 7, 9, 22, 23, 26, 28, 31).
Isso permite aos usuários civis terem acesso às medidas GPS mais precisas. Ao
mesmo tempo, a constelação não estava completamente em operação e, portanto, o A-
S também estava desligado, permitindo aos usuários receberem dados limpos tanta na
frequência L1 quanto na L2.
Um dia de teste foi escolhido: 19 de novembro de 1993, analisado sem a degradação
do sinal, ou seja, sem SA. O período de análise escolhido cobriu um longo período de
24 horas de dados.

58
As informações estatísticas consideradas para a elaboração dos gráficos e das tabelas
apresentados na sequência são os resíduos de pseudo-distância, a média e o desvio-
padrão dos resíduos, os erros em posição (no sistema de coordenadas orbital RNT) e o
RMS dos erros.
A Tabela 9.1 contém esquematizadas as informações com respeito às condições de
teste. A Tabela 9.2 apresenta as condições iniciais para a DO para o dia de teste,
sendo que σ2 representa o desvio padrão. A Tabela 9.3 traz as condições iniciais de
coordenadas de posição e de velocidade. A Tabela 9.4 apresenta a tendência, a deriva
e a taxa de deriva, relativas ao mesmo dia de teste. As coordenadas de posição e de
velocidade estão no sistema inercial ToD (verdadeiro da data), em metros e em
metros/segundo, respectivamente, e no instante 00:00:00 UTC do respectivo dia. Estes
dados foram extraídos dos arquivos POE do T/P. Na primeira passagem de DO, a
condição inicial é propagada pelo integrador RKF78 até o primeiro instante de
observação, que consiste em cerca de 3 s (ou 30 s no tempo GPS) para todos os casos.
Tabela 9.1 - Condições de teste para o dia 19/11/1993
Integrador RKF78
Passo do integrador numérico (s) 30
Modelo de forças
Geopotencial: JGM-2 até 28×28
Sol-Lua : Problema Restrito-Plano-Circular Três Corpos
Pressão de Radiação Solar Direta (UKF somente)
Correção ionosférica Não
Período de determinação (h) 24
Disponibilidade seletiva (SA) Desativada
Controle de rejeição de medidas, (m) Maior que 300
Estimadores de estado UKF
EKF

59
Tabela 9.2 - Condições iniciais do estimador para o dia 19/11/1993
Parâmetro 19/11/93
σ2 da posição, (m2) 106
σ2 da velocidade, (m2/s2) 102
σ2 da tendência, (m2) 106
σ2 da deriva, (m2/s2) 102
σ2 da taxa de deriva, (m2/s4) 10-16
σ2 da medida, (m2) 104
Tabela 9.3 - Condições iniciais das coordenadas de posição e de velocidade para o dia 19/11/1993 a 0 hora UTC
19/11/93
ToDx , (m) 0,2973502720511⋅107
ToDy , (m) - 0,2580522134223⋅107
ToDz , (m) - 0,663620581146⋅107
ToDx& , (m/s) 0,65728917166⋅104
ToDy& , (m/s) 0,18681979790⋅104
ToDz& , (m/s) 0,2217053225⋅104
Tabela 9.4 - Condições iniciais do relógio para o dia 19/11/1993 à 0 hora UTC
19/11/93
0b , (m) -37,6
1b , (m/s) 0
2b , (m/s2) 0

60
9.1.1 Resultados Obtidos
Para melhor entendimento do trabalho, os resultados obtidos foram divididos em três
etapas, que traduzem as fases em que o desenvolvimento foi realizado. Nestas etapas,
as coordenadas estimadas de posição são comparadas com a referência POE/JPL do
T/P. Os resultados obtidos são avaliados através, basicamente, de dois parâmetros:
erro em posição e resíduo de pseudo-distância. O erro em posição é dado pela
diferença entre os valores de referência e os valores estimados obtidos, enquanto o
resíduo de pseudo-distância é definido pela diferença entre a pseudo-distância
observada e a calculada (estimada). O erro em posição pode ser expresso da seguinte
forma:
−−−
≡∆zz
yy
xx
r
em que z) y, x,( e )zˆ ,y ,x( são as componentes de posição de referência e estimada,
respectivamente, no sistema de referência da órbita, que serão posteriormente
transladadas para as componentes radial, normal e transversal do sistema fixo na
órbita. O resíduo de pseudo-distância é dado por:
cρρρ −=∆
em que cρρ e são as medidas de pseudo-distância observada e calculada,
respectivamente.
Os resultados obtidos no desenvolvimento da tese podem ser divididos em três etapas,
de acordo com a melhoria de precisão do modelo dinâmico adotado. São estas etapas:
1. Implementação dos efeitos do geopotencial até ordem e grau 10 nos
estimadores considerados. Os resultados serão apresentados na sub-seção
9.3.1.1.
2. Análise da implementação do geopotencial até ordem e grau 50 e avaliação de
seu impacto nos resultados de DO, comparado aos resultados da Etapa 1. Os
resultados desta análise se encontram na sub-seção 9.3.1.2.

61
3. Análise da inclusão da atração gravitacional luni-solar no modelo de forças e
da sua influência no processo de DO. Os resultados decorrentes desta análise
serão mostrados na sub-seção 9.3.1.3.
Os resultados das análises das três etapas, resumidamente descritas acima, obtidos via
filtros de Kalman estendido e “unscented”, foram confrontados com a referência
POE/JPL do T/P. Posteriormente, estes resultados foram levados do sistema de
referência para o sistema orbital, ou sistema RNT, em que é possível analisar
diretamente o que ocorre nas componentes orbitais e evolução da órbita, ao invés de
analisar o que ocorre do ponto de vista de um referencial na Terra, pela maior
dificuldade de visualização nesta situação (PARDAL, 2008).
9.2 Análise de Propagação de Órbita
Esta Seção tem o objetivo de analisar o efeito de inclusão de cada uma das
perturbações consideradas neste trabalho na propagação de órbita, antes da DO via
estimação pelos filtros estendido ou “unscented”. Para tanto, foram gerados gráficos
que apresentam a evolução do erro de propagação nas coordenadas radial, normal e
transversal, em metros, em função do tempo, em horas. A análise abrangeu o período
de 24 horas de dados, intervalo de tempo representativo para a propagação de órbita, e
comparou resultados para dois dias iniciais diferentes: 19/11/1993 e 05/01/1994.
Os gráficos de propagação de órbita foram feitos analisando, passo a passo, a inclusão
de cada perturbação considerada, ou seja, a contribuição da perturbação seguinte
comparada com o resultado das anteriores. Sendo assim, inicialmente foi considerado
um modelo de geopotencial de ordem e grau 10; posteriormente, um modelo de
geopotencial mais complexo, de ordem e grau 50; e, finalmente, um modelo de
geopotencial de ordem e grau 50 acrescido da modelagem da atração gravitacional
luni-solar.
Os gráficos a serem apresentados na Figura 9.1 trazem o comportamento dos erros
apenas para os três modelos citados no parágrafo anterior. No entanto, em propagação
de órbita deveria ainda ser analisado o impacto de introduzir a pressão de radiação
solar direta no modelo dinâmico. A inclusão deste efeito perturbador, embora devesse
ser significativo para o modelo do T/P, comprovadamente não acarreta melhorias nos

62
resultados (PARDAL, 2008). Por este motivo, embora os gráficos para um modelo
que combina geopotencial até alto grau e ordem, atração gravitacional luni-solar e
pressão de radiação solar direta tenham sido gerados, não foram incluídos na Figura
9.1, uma vez que seu comportamento é muito similar ao do modelo menos preciso
(que inclui apenas o geopotencial até ordem e grau 50). Suas estatísticas são
apresentadas na Tabela 9.5, corroborando o que já foi anteriormente comprovado
sobre as melhorias pouco significativas verificadas ao inserir seus efeitos no modelo
dinâmico.
Neste ponto, é importante dizer que o modelo de geopotencial adotado, embora esteja
implementado completamente (até ordem e grau 50×50), na prática computa os
coeficientes do geopotencial até ordem e grau 28×28. Isto se deve a uma limitação do
FORTRAN em ler números muito pequenos (números muito próximos de zero - da
ordem de 10-47 ou menores). Embora os valores dos coeficientes do geopotencial de
ordem superior estejam explicitamente declarados no código do programa, o
FORTRAN os entende como zeros. Desta forma, seus efeitos não são computados no
processo de DO e, por esta razão, daqui para frente o modelo de geopotencial será
referenciado até ordem e grau efetivamente implementados, ou seja, até 28×28.
A Figura 9.1 mostra os efeitos das perturbações na propagação de órbita. Ela
apresenta os resultados para os modelos que incluem: o geopotencial até ordem e grau
10 (Geo10); o geopotencial até ordem e grau 28 (Geo28); e o geopotencial 28×28
acrescido da atração do Sol e da Lua (AGLS), para o dia 19/11/93, correspondendo
aos três gráficos da coluna da esquerda; e para o dia 05/01/94, correspondendo aos
três gráficos da coluna da direita.
A Tabela 9.5 mostra os valores do RMS dos erros em cada coordenada do sistema
RNT e do erro total, para cada modelo apresentado na Figura 9.1 e para o modelo que
considera os efeitos do geopotencial 28×28 e da pressão de radiação solar direta
(PRS), nos dias 19/11/1993 e 05/01/1994. A intenção ao se destacar o RMS por
coordenadas é a de colocar em evidência qual a componente em que os erros são
maiores, provocando, portanto, o aumento do RMS total. É notório, por esta tabela,
que acrescentar a pressão de radiação solar direta não altera significativamente os
resultados obtidos com o modelo menos complexo que é composto pelos efeitos

63
apenas do geopotencial até ordem e grau 28. Em destaque nesta tabela, em amarelo,
os valores do RMS dos erros que levaram a escolher 19/11/1993 como dia de teste
para as simulações de DO.
Pelos gráficos da coluna da direita da Figura 9.1, nota-se que para o dia 05/01/1994
melhorar o modelo do geopotencial diminui significativamente o RMS dos erros nas
três componentes. Com o auxílio da Tabela 9.5, verifica-se que os valores de queda
foram de aproximadamente 53% na componente radial, 33% na normal e 76% na
transversal, o que refletiu em uma diminuição de 74% no RMS do erro total (uma
composição dos erros nas três coordenadas), caindo de 159,266 m para 41,872 m. Já
para o dia 19/11/1993, a maior precisão do modelo de geopotencial manteve
praticamente os mesmos valores dos RMS dos erros nas componentes radial e normal,
mas ocasionou um aumento de 67% na componente transversal, o que gerou um
aumento de 25% no RMS do erro total, que subiu de 20,945 m para 28,088 m. Tais
fatos são verificáveis através dos gráficos da coluna da esquerda da Figura 9.1 e da
Tabela 9.5.

64
Modelo: Geo 10 - 05/01/94
-60
0
60
120
180
240
300
0 4 8 12 16 20 24
radial
normal
transversal
Modelo: Geo 10 - 19/11/93
-50
-25
0
25
50
0 4 8 12 16 20 24
erro
[m]
radial
normal
transversal
Modelo: Geo 28 - 05/01/94
-50
-25
0
25
50
75
100
0 4 8 12 16 20 24
radial
normal
transversal
Modelo: Geo 28 - 19/11/93
-50
-25
0
25
50
0 4 8 12 16 20 24
erro
[m]
radial
normal
transversal
Modelo: Geo 28 + AGLS - 05/01/94
-5
0
5
10
15
20
25
0 4 8 12 16 20 24tempo [h]
radial
normal
transversal
Modelo: Geo 28 + AGLS - 19/11/93
-12
-8
-4
0
4
8
12
0 4 8 12 16 20 24tempo [h]
erro
[m]
radial
normal
transversal
Figura 9.1 - Propagação de órbita em função do tempo: inclusão do geopotencial até ordem 10; do geopotencial até ordem 28; e da atração luni-solar, para os dias 19/11/1993 e
05/01/1994.

65
Tabela 9.5 - RMS dos erros por componente e total para propagação de órbita
radial normal transversal total
AGLS
5/1/1994
19/11/93
7,9987,5891,7201,850
20,945
Geo28
2,501 17,502 37,884 41,807PRS
Geo10 1,764 19,812 6,562
157,010 159,266
Geo28 2,495 17,490 37,962 41,872
28,020
AGLS 2,090 1,367 4,427 5,083
Geo10 5,328 26,180
PRS 1,917 19,788 19,723
1,896 19,891 19,742 28,088
Data ModeloRMS (m)
Quando a atração gravitacional luni-solar é incluída no modelo dinâmico, para os dois
dias de teste há uma diminuição acentuada nos valores dos RMS dos erros nas
componentes. Para 05/01/1994, o valor da componente radial caiu 26%, o da normal
90% e o da transversal 80%, valores que combinaram para uma diminuição de 81%
no RMS do erro total, que caiu de 41,872 m para 7,998 m. Já para 19/11/1993, houve
aumento de 9% no RMS do erro da radial, mas diminuição de 93% no RMS da
normal e 78% no da transversal, o que provocou uma queda de 82% no RMS do erro
total, que foi de 28,088 m para 5,083 m. Tais resultados se verificam no 1º e no 3º
gráficos das colunas da esquerda e da direita da Figura 9.1 e também na Tabela 9.5.
Em razão das condições iniciais felizes do dia 19/11/1993, que culminaram em um
RMS do erro total de cerca de 5 m, contra os quase 8 m do dia 05/01/1994, os efeitos
perturbadores nas componentes RNT se tornaram mais evidentes nos resultados
daquele dia. Em função disso, optou-se por realizar todas as simulações de DO para
os valores de 19/11/1993 como condição inicial dos filtros de Kalman “unscented” e
estendido.

66
9.3 Análise de Determinação de Órbita
Esta Seção apresenta os resultados dos testes e as análises consequentes dos
algoritmos de DO utilizando os filtros de Kalman “unscented” e estendido,
considerando modelos de forças que incluem perturbações devidas ao geopotencial
até ordem e grau 10; ao geopotencial até ordem e grau 28; e à atração gravitacional
luni-solar combinada com o geopotencial 28×28. Como já foi mencionado, os
algoritmos foram implementados em linguagem FORTRAN. A seguir, são
apresentadas as expectativas, quando da proposição deste trabalho, a descrição dos
dados e os resultados efetivamente obtidos.
Originalmente, pensou-se também em incluir os efeitos da pressão de radiação solar
direta no processo de DO. No entanto, como já foi dito anteriormente, verificou-se
que a inclusão da atração gravitacional luni-solar no modelo dinâmico produz
melhorias significativas nos resultados de propagação de órbita, em comparação com
a adição da pressão de radiação solar direta, conforme mostrado na Tabela 9.5.
Considerando este fato e levando ainda em conta que calcular analiticamente a
aceleração referente à pressão de radiação solar direta do T/P, cujo modelo é
altamente complexo, demandaria tempo e esforço preciosos para obtenção de um
resultado que se mostrou pouco significativo, optou-se por não computar seus efeitos
neste momento. Esta abordagem analítica seria necessária para incluir o efeito da
pressão de radiação solar direta no processo de DO através do EKF, já que a matriz
Jacobiana de derivadas parciais das perturbações tem como origem as expressões
analíticas associadas às perturbações. Considerando as dificuldades de implementação
e o efeito negligenciável da perturbação no caso do T/P, a pressão de radiação solar
direta não foi incluída no modelo utilizado pelo EKF. Todavia, como o UKF se baseia
no próprio modelo não linear, a título de ilustração, um modelo que combina
geopotencial até grau e ordem 28, atração gravitacional luni-solar e pressão de
radiação solar direta, cuja sigla de identificação é “PRS”, foi implementado no
modelo dinâmico considerado para o referido filtro.

67
9.3.1 Resultados Esperados
Conforme mencionado anteriormente, neste trabalho foi proposta a implementação de
um algoritmo de DO de satélites artificiais através de um estimador não linear, o filtro
não linear “unscented” de Kalman, utilizando dados reais do satélite T/P para
realização de testes de aplicação. As medidas utilizadas para atualização das
estimativas são medidas reais, que foram obtidas de um receptor GPS a bordo do
satélite; dados simulados não são usados na estimação. O modelo dinâmico
considerado no processo de filtragem é refinado gradativamente, a fim de investigar o
impacto da precisão da dinâmica no processo de DO via UKF. Para a verificação de
tais implementações, os resultados obtidos foram confrontados com resultados de um
estimador de referência, cuja teoria já é amplamente empregada em problemas não
lineares: o EKF.
Em particular a órbita do satélite T/P tem sido utilizada por Grupos da Divisão de
Mecânica Espacial e Controle do INPE e pelo Departamento de Matemática da
FEG/UNESP, em pesquisas voltadas ao desenvolvimento de métodos de
determinação de órbitas de satélites artificiais que possuam receptores GPS a bordo.
Os benefícios para as instituições incluem a melhoria do desempenho de processos de
determinação de órbitas e, ao mesmo tempo, a minimização do custo deste
procedimento.
9.3.1.1 Geopotencial até Ordem e Grau 10
A análise isolada dos efeitos do geopotencial até ordem e grau 10 na DO tem como
objetivo reproduzir os resultados de Chiaradia (2000), obtidos para o EKF, a fim de
assegurar a correta continuidade do trabalho, cujo cerne é o desenvolvimento e a
implementação do UKF em DO com características de tempo real.
Como já comentado, optou-se por mostrar os resultados em componentes do sistema
orbital (radial, normal e transversal), tendo como motivação estudar a influência de
diferentes modelos dinâmicos, com distintos níveis de precisão, no comportamento do
UKF aplicado à DO, cujos resultados foram comparados com os resultados do mesmo
problema resolvido através do EKF. Sendo assim, para efeitos de comparação do erro
em coordenadas de posição, os resultados serão mostrados nas componentes radial,

68
normal e transversal, conforme foi feito na Seção 9.2. Vale novamente ressaltar que,
ao apresentar os resultados nestas componentes, deixa de ser necessário analisar os
erros em velocidade, pois no sistema orbital, a componente transversal já representa o
efeito da velocidade e seu comportamento no transcorrer da órbita.
A Figura 9.2 mostra o comportamento do erro, em metros, em função do tempo, em
horas, em cada uma das componentes do sistema orbital para os três testes. Para
destacar a evolução temporal do erro em cada componente, a escala dos gráficos da
Figura 9.2 não permite visualizar as altas amplitudes dos erros ocorridas nos instantes
iniciais do processo de aplicação dos filtros. Com a finalidade de visualizar estes
erros, a Figura 9.3, na sequência, traz em destaque apenas a primeira hora de
estimação, para os dois filtros. Este tipo de comportamento ocorreu em todos os casos
de estimação e, para evitar repetição de gráficos similares, a Figura 9.3 será
considerada representativa desta situação, para qualquer dos casos mostrados após ela.
De acordo com a Figura 9.3, para o EKF, a maior amplitude da ordem de 85 m ocorre
na componente normal, contra 37 m do UKF, na componente transversal. A Tabela
9.6 indica que o RMS dos erros em coordenadas e o RMS do erro total são
praticamente os mesmos tanto para o UKF quanto para o EKF, mostrando a
competitividade entre os estimadores. Os valores dos RMS diferem entre si no
máximo 11%, na componente radial, quando o UKF apresenta RMS de 4,789 m
contra 5,361 m do EKF. Na Figura 9.2, “Geo10” indica que apenas perturbações
devidas ao geopotencial 10×10 foram consideradas.

69
-50
-25
0
25
50
0 4 8 12 16 20 24
tempo [h]
tran
sver
sal [
m]
-50
-25
0
25
50
0 4 8 12 16 20 24
tempo [h]
-50
-25
0
25
50
0 4 8 12 16 20 24
-50
-25
0
25
50
0 4 8 12 16 20 24
norm
al [m
]EKF - Geo 10 - 19/11/93
-30
-15
0
15
30
0 4 8 12 16 20 24
UKF - Geo 10 - 19/11/93
-30
-15
0
15
30
0 4 8 12 16 20 24
radi
al [m
]
Figura 9.2 - Erros nas coordenadas radial, normal e transversal para o dia 19/11/93, resultantes da implementação do geopotencial 10×10 pelo UKF (à esquerda) e pelo EKF (à
direita).
A máxima amplitude observada na componente transversal do UKF, na Figura 9.2,
ocorreu no decorrer do processo de estimação, no intervalo entre 4 e 6 horas, e
também foi verificada no processamento via EKF. Já o valor máximo da componente
normal do EKF representa um pico que ocorreu no início do processo, por uma
dificuldade de convergência nas primeiras iterações, e se repetiu, com valores
diferentes, nas componentes radial e transversal. Este comportamento inicial não foi
observado nos resultados do UKF.

70
1ª hora de estimação - UKF - Geo 10 - 19/11/93
-90
-60
-30
0
30
60
0 0.2 0.4 0.6 0.8 1
radi
al [m
]
1ª hora de estimação - EKF - Geo 10 - 19/11/93
-90
-60
-30
0
30
60
0 0.2 0.4 0.6 0.8 1
-60
-30
0
30
60
90
0 0.2 0.4 0.6 0.8 1
-30
0
30
60
0 0.2 0.4 0.6 0.8 1
tempo [h]
-60
-30
0
30
60
90
0 0.2 0.4 0.6 0.8 1
norm
al [m
]
-30
0
30
60
0 0.2 0.4 0.6 0.8 1
tempo [h]
tran
sver
sal [
m]
Figura 9.3 - Destaque da primeira hora de estimação do comportamento dos erros nas
coordenadas radial, normal e transversal para o dia 19/11/93, resultantes da implementação do geopotencial 10×10 pelo UKF (à esquerda) e pelo EKF (à direita).
Os resultados acima indicam que após o transitório inicial da aplicação, em que os
filtros se comportam de modos distintos, o comportamento de ambos se estabiliza e
passam a apresentar uma evolução rigorosamente equivalente. Desta forma, a
mencionada diferença nos valores dos erros entre o UKF e o EKF deve-se
exclusivamente às diferenças de comportamento entre os estimadores nos instantes
iniciais do processo de estimação.

71
9.3.1.2 Geopotencial até Ordem e Grau 28
Após os resultados de referência (implementados para um modelo de geopotencial de
ordem e grau baixos através do EKF) para o dia 19/11/1993 terem sido reproduzidos e
do equivalente do UKF ter sido implementado, os resultados obtidos corroboraram o
que já havia sido concluído no Capítulo 6: ambos os estimadores parecem
competitivos, do ponto de vista dinâmico, gerando resultados dos erros em relação à
referência do POE/JPL com valores praticamente idênticos, nas componentes RNT e
apresentando comportamentos das curvas de erro absolutamente similares, à exceção
das primeiras iterações, como foi mostrado nas Figuras 9.2 e 9.3.
Com base nestes resultados, optou-se por investigar mais detalhadamente a influência
da precisão do modelo dinâmico nos resultados do estado estimado através do UKF.
Sendo assim, nesta segunda etapa, o modelo de geopotencial ganhou mais precisão,
com a inclusão dos coeficientes dos harmônicos zonais e tesserais até ordem e grau
28. Embora estejam disponíveis coeficientes de ordem e grau mais altos, por
limitações do FORTRAN que já foram mencionadas anteriormente, não foi possível
incluí-los. Novamente nesta etapa, os resultados obtidos foram comparados com uma
solução de referência via EKF, que também precisou ser gerada neste trabalho.
A Figura 9.4 mostra o comportamento do erro, em metros, em função do tempo, em
horas, em cada uma das componentes do sistema orbital para os três testes. De acordo
com esta Figura, a maior amplitude da ordem de 83 m ocorre para o EKF, novamente
na componente normal, contra a amplitude da ordem de 37 m alcançada pelo UKF, na
componente transversal. A Tabela 9.6 indica que o RMS dos erros em coordenadas e
o RMS do erro total são muito parecidos para o UKF e para o EKF, evidenciando a
competitividade entre os estimadores. Os valores dos RMS diferem entre si no
máximo 11%, na componente radial, quando o UKF atinge RMS de 4,605 m contra
5,197 m do EKF. Essa diferença, como no caso anterior, reflete apenas a distinção de
comportamento dos filtros nos instantes iniciais da aplicação. Na Figura 9.4, “Geo10”
indica que apenas perturbações devidas ao geopotencial 10×10 foram consideradas e
“Geo28”, que foram incluídas perturbações devidas ao geopotencial 28×28.

72
EKF - 19/11/93
-30
-15
0
15
30
0 4 8 12 16 20 24
Geo10 Geo28
-50
-25
0
25
50
0 4 8 12 16 20 24
tempo [h]
Geo10 Geo28
UKF - 19/11/93
-30
-15
0
15
30
0 4 8 12 16 20 24
radi
al [m
]
Geo10 Geo28
-50
-25
0
25
50
0 4 8 12 16 20 24
norm
al [m
]
Geo10 Geo28
-50
-25
0
25
50
0 4 8 12 16 20 24
tempo [h]
Geo10 Geo28
-50
-25
0
25
50
0 4 8 12 16 20 24
tempo [h]
tran
sver
sal [
m]
Geo10 Geo28
Figura 9.4 - Erros nas coordenadas radial, normal e transversal para o dia 19/11/93 –
comparação entre a implementação do geopotencial 10×10 e a do geopotencial 28×28 pelo UKF (à esquerda) e pelo EKF (à direita).
9.3.1.3 Atração Gravitacional Luni-Solar
Os resultados apresentados nas duas sub-seções anteriores, 9.3.1.1 e 9.3.1.2,
mostraram que os erros nas estimativas das três componentes não sofreram qualquer
variação significativa, para qualquer dos filtros analisados, quando o modelo de
geopotencial de ordem e grau 10 é substituído por outro mais preciso, de ordem e grau
28. Como o interesse maior está em aplicações de tempo real através do UKF, sugere-
se, em aplicações futuras, a utilização do modelo de ordem e grau 10, já que dos
resultados apresentados pode-se concluir que aumentar a sua complexidade não
implica em qualquer ganho, em termos de precisão das estimativas.

73
Entretanto, nesta sub-seção ainda se analisa o caso em que, aos efeitos do modelo de
geopotencial mais complexo (até ordem e grau 28), é adicionada a modelagem da
atração gravitacional luni-solar. Esta se trata da terceira perturbação de efeito mais
preponderante na órbita do T/P.
A Figura 9.5 mostra o comportamento do erro, em metros, em função do tempo, em
horas, em cada uma das componentes do sistema orbital para os três testes. De acordo
com esta Figura, a máxima amplitude na componente normal de aproximadamente 83
m ocorre para o EKF, contra cerca de 37 m atingidos pelo UKF, novamente na
componente transversal. A Tabela 9.6 indica que o RMS dos erros em coordenadas e
o RMS do erro total são extremamente similares para os dois estimadores, mostrando
a competitividade entre os estimadores. Os valores RMS diferem entre si no máximo
11%, na componente radial, quando o UKF alcança RMS de 4,576 m contra 5,170 m
do EKF. Na Figura 9.5, “Geo28” indica que foram incluídas perturbações devidas ao
geopotencial até ordem e grau 28 e “AGLS”, um modelo de geopotencial 28×28 e
atração do Sol e da Lua combinados.

74
EKF - 19/11/93
-30
-15
0
15
30
0 4 8 12 16 20 24
radi
al [m
]
Geo28 AGLS
UKF - 19/11/93
-30
-15
0
15
30
0 4 8 12 16 20 24
radi
al [m
]Geo 28 AGLS
-50
-25
0
25
50
0 4 8 12 16 20 24
norm
al [m
]
Geo28 AGLS
-50
-25
0
25
50
0 4 8 12 16 20 24
norm
al [m
]
Geo28 AGLS
-50
-25
0
25
50
0 4 8 12 16 20 24
tempo [h]
tran
sver
sal [
m]
Geo28 AGLS
-50
-25
0
25
50
0 4 8 12 16 20 24
tempo [h]
tran
sver
sal [
m]
Geo28 AGLS
Figura 9.5 - Erros nas coordenadas radial, normal e transversal para o dia 19/11/93 – comparação entre a implementação do geopotencial 28×28 e a da atração gravitacional luni-
solar pelo UKF (à esquerda) e pelo EKF (à direita).

75
9.3.1.4 Pressão de Radiação Solar Direta
Como já foi explicado, embora a pressão de radiação solar direta na teoria seja o
efeito perturbador mais significativo para o T/P após o geopotencial, sua inclusão não
ocorreu neste momento por duas razões. A primeira é que, na prática, incluir tal efeito
não melhora significaticamente os erros resultantes (PARDAL, 2008); e a segunda é
que tal inclusão demandaria tempo e esforço preciosos para o cálculo analítico da
derivada de sua aceleração, a ser considerada na matriz Jacobiana do EKF. Contudo, o
UKF se baseia em modelos dinâmico e de medida não lineares, o que permite a
inclusão de tal efeito em sua implementação sem a necessidade de derivadas. Por
estes fatos, os resultados de pressão de radiação solar direta foram analisados apenas
na implementação via UKF.
A Figura 9.6 mostra a comparação entre os erros nas componentes do sistema orbital
resultantes do modelo que considera o geopotencial 28×28 e a atração gravitacional
luni-solar combinados, representado pelo índice “AGLS”, e do modelo que, além de
tais efeitos, leva em conta a parcela de perturbação devida à pressão de radiação solar
direta, representado pelo índice “PRS”. Os resultados para este caso específico foram
obtidos somente para a implementação via UKF, pelos motivos acima explicados. No
entanto, com base nos resultados anteriores de plena equivalência entre os resultados
dos dois estimadores (Figuras 9.3 a 9.5 e Tabela 9.6), é possível extrapolar e dizer que
o mesmo ocorreria neste caso.
De acordo com a Figura 9.6, a máxima amplitude se dá na componente transversal,
com valor de 37,048 m. A Tabela 9.6 indica que os RMS dos erros em coordenadas e
do erro total são praticamente os mesmos, independente de se incluir a pressão de
radiação solar no modelo dinâmico ou não, mostrando realmente que seu efeitos são
poucos sentidos no processo de DO. Os valores dos RMS do erro total e dos erros em
cada componente, para os casos com ou sem a inclusão da pressão de radiação solar
direta, “PRS” e “AGLS”, respectivamente, na Tabela 9.6, diferem entre si por no
máximo 1%

76
UKF - 19/11/93
-30
-15
0
15
30
0 4 8 12 16 20 24
radi
al [m
]
AGLS PRS
-50
-25
0
25
50
0 4 8 12 16 20 24
norm
al [m
]
AGLS PRS
-50
-25
0
25
50
0 4 8 12 16 20 24
tempo [h]
tran
sver
sal [
m]
AGLS PRS
Figura 9.6 - Erros nas coordenadas radial, normal e transversal para o dia 19/11/93, resultantes da implementação da pressão de radiação solar direta pelo UKF.
A Tabela 9.6, a seguir, apresenta de forma sucinta os RMS dos erros por coordenada e
do erro total, em metros, para ambos os algoritmos de estimação. Os modelos que
incluem geopotencial 10×10 somente, com efeitos de geopotencial 28×28 e atração
gravitacional luni-solar combinados foram implementados pelos dois estimadores,
enquanto o modelo que inclui os efeitos da pressão de radiação solar direta associada
às duas perturbações do modelo intermediário teve implementação apenas pelo UKF,
por razões anteriormente explicadas. Estão destacados, em amarelo, os resultados de
cada estimador, ambos para o modelo que inclui atração gravitacional luni-solar e
geopotencial de altos grau e ordem. Nesta tabela foram incluídas ainda as estatísticas
de média e de covariância do erro em posição, obtidas para cada caso. Como

77
22TOTAL )padrãodesvio()média(RMS +≈ , os resultados confirmam que a
consistência estatística foi mantida.
Tabela 9.6 - Estatísticas resultantes dos erros para cada um dos modelos implementados tanto pelo UKF quanto pelo EKF, para o dia 19/11/1993
radial normal transversal totalerro RMS (m)
Filtro Modelo
17,184 ± 6,569 13,6344,789 11,389
erro posição (m)média ± desvio padrão
13,673
18,399
17,881
17,575
17,611
18,709
18,178
17,227
13,711
13,690
5,170 10,29216,473 ± 6,940
5,361 11,546
5,197 10,772
17,362 ± 6,964
16,814 ± 6,903
13,61716,659 ± 6,491
16,319 ± 6,519
13,602
13,62910,1504,622
4,576 10,14616,319 ± 6,516
G28
AGLS
UKF
EKF
G10
G28
AGLS
G10
PRS
4,605 10,635
9.3.1.5 Outras Análises Resultantes da Determinação de Órbita
Ainda no que concerne aos resultados de DO, duas outras análises foram consideradas
relevantes: comportamento dos resíduos de pseudo-distância ao longo do tempo; e
custo de tempo de processamento, ambos para diferentes estimadores e modelos
dinâmicos.
A Figura 9.7 apresenta o comportamento típico dos resíduos de pseudo-distância, em
metros, ao longo do tempo, em horas. Este gráfico especificamente foi obtido para o
modelo dinâmico que inclui até a pressão de radiação solar direta, implementado
através do UKF. Os resíduos apresentam uma distribuição normal, com média
próxima de zero e desvio padrão perto de 14 m, para um período de 24 horas.
Conforme a Tabela 9.7, fica claro que os resíduos para os quatro modelos
implementados são muito parecidos, com mesmo comportamento e estatísticas. Em
destaque na Tabela 9.7, em amarelo, os valores referentes ao gráfico da Figura 9.7.

78
UKF - PRS - 19/11/1993
-100
-75
-50
-25
0
25
50
75
100
0 2 4 6 8 10 12 14 16 18 20 22 24
tempo, [h]
resí
duos
, [m
]
Figura 9.7 - Resíduo de pseudo-distância ao longo do tempo para o modelo que inclui até a pressão de radiação solar direta, para o dia 19/11/1993.
Tabela 9.7 - Estatísticas dos resíduos de pseudo-distância para o dia 19/11/1993
PRS
G28
EKF
G10 (-0,0378)± 14,1777
G28 (-0,0390)± 14,0552
AGLS (-0,0509)± 13,9709
0,0423 ± 13,5534
resíduo pseudo-distância (m)média ± desvio padrão
0,0457 ± 13,6847
UKFAGLS 0,0315 ± 13,4651
0,0314 ± 13,4614
Filtro Modelo
G10
Com relação à comparação de custo de tempo de processamento, foi necessário medir
o tempo de CPU em um mesmo computador: um Pentium 4 ® com 3,06 GHz e 1,00
GB de memória RAM. Havia 2880 épocas no intervalo de amostragem, o que
significa uma nova amostra a cada 30 segundos. O número médio de medidas GPS,

79
por época, foi 5,7, o que significa que foram processadas quase 6 observações de
satélites GPS a cada época.
O tempo de processamento, à medida que o modelo dinâmico se tornava mais preciso,
tanto na implementação do UKF quanto na do EKF, teve maior acréscimo quando o
modelo de geopotencial se tornou mais completo: 88% no EKF; e 94% no UKF, como
pode ser conferido na Tabela 9.8. A implementação com o modelo de perturbações
devidas somente ao geopotencial 10×10, pelo EKF, levou pouco mais de 1 s para
estimar o estado, enquanto pelo UKF, quase 5 s; em seguida, apenas o aumento da
ordem e do grau do geopotencial para 28×28, pelo EKF exigiu pouco mais de 11 s
para estimar o estado, enquanto que, pelo UKF, quase 82 s; para implementar o
modelo que inclui ainda a atração gravitacional luni-solar, o EKF precisou de quase
13 s, enquanto o UKF, de 98 s; e, para o modelo dinâmico mais completo, que soma a
pressão de radiação solar direta aos outros efeitos, o UKF levou em torno de 111 s
para processar as medidas e estimar o vetor de estado para o problema de DO, com
medidas reais de satélites GPS.
Tabela 9.8 - Comparação de custo de tempo de processamento
Tempo de
CPU (s)
Estimador Geo10 Geo28 Geo28+AGLS Geo28+AGLS
+PRS direta
UKF 4,734 81,953 98,000 110,578
EKF 1,359 11,345 12,516 _______
Conforme mencionado anteriormente, no Capítulo 6, a Tabela 6.2 forneceu evidências
de que o tempo de CPU não é diretamente proporcional ao aumento na dimensão do
estado causado pela geração dos 2n + 1 sigma-pontos. Analisando agora a relação
entre custo de tempo de processamento e complexidade do modelo dinâmico, pode-se
garantir que seu aumento implica seguramente em um custo maior de tempo de
processamento. No entanto, a proporção em que este aumento ocorre não foi possível
determinar. Ficou evidente que processar um modelo de geopotencial com ordem e
grau mais elevados é o ponto mais custoso do ponto de vista do tempo de CPU;
porém, também se garante que incluir outras perturbações demandará mais tempo de

80
processamento, qualquer que seja a complexidade da inclusão, especialmente quando
o UKF for o estimador em questão.
9.3.1.6 Conclusões de Determinação de Órbita
As Figuras 9.3 a 9.6 e a Tabela 9.6 mostraram que aumentar a precisão do modelo
dinâmico não é fator determinante para a melhoria dos resultados obtidos. Tanto isto é
verdade que o modelo de geopotencial 10×10 apresenta RMS dos erros nas
componentes e do erro total e amplitude de variação dos erros nas componentes
radial, normal e transversal da mesma ordem de grandeza que o modelo completo,
com a inclusão até da pressão de radiação solar direta, para o UKF (PARDAL et al.,
2010).
Este fato já era esperado, uma vez que a estimação via filtros de Kalman não confia
plenamente da dinâmica do sistema, como o faz o Método de Mínimos Quadrados,
por exemplo. Sendo assim, embora a propagação de órbita tenha mostrado que
melhorar o modelo dinâmico diminui os erros entre o estado estimado e a referência
do POE/JPL, como os filtros de Kalman assumem ruído dinâmico diferente de zero,
tal fato não se reflete na DO, quando o estado é estimado via filtros de Kalman
“unscented” ou estendido (PARDAL et al., 2009).
No que se refere ao custo de tempo de processamento, constatou-se que o tempo de
CPU gasto não é diretamente proporcional ao aumento na dimensão do estado
causado pela geração dos 2n + 1 sigma-pontos; e, constatou-se ainda que a inclusão de
qualquer efeito perturbador, independente da complexidade de seu modelo, aumentará
o custo do tempo de processamento, principalmente se a implementação for feita
através do UKF.
Tendo-se constatado que convergência e consistência estatística foram alcançadas, é
possível agora concentrar esforços em diminuir os erros entre o estado estimado por
qualquer dos filtros e a referência do POE/JPL. Dos resultados apresentados pode-se
concluir que, do ponto de vista dinâmico, a extensa investigação realizada indica que
um limite de precisão está sendo atingido. Com isso, outras soluções devem ser
buscadas, com o intuito de diminuir os erros resultantes do processo de estimação
pelos dois estimadores.

81
Deve-se, neste ponto, ponderar até onde vale a pena sofisticar o modelo dinâmico
adotado, uma vez que um modelo simples de geopotencial de baixos grau e ordem
apresentou, até aqui, resultados rigorosamente equivalentes àqueles obtidos em todas
as modelagens mais complexas consideradas. Isto pode ter ocorrido porque no
processo de DO efetuado até este ponto, a propagação foi feita para um intervalo
pequeno de amostragem das medidas, sendo as estimativas atualizadas pelas medidas
recebidas no instante, após a propagação, fato que reduz o erro. Talvez em função de
se ter utilizado uma taxa de amostragem de observações muito grande, o que se traduz
em intervalo de propagação muito pequeno no filtro, o erro de propagação tenha se
tornado irrelevante no desempenho dos estimadores, mesmo com a adoção de
modelos dinâmicos mais sofisticados. Desta forma, antes de concluir que uma
modelagem dinâmica mais simples pode ser adotada indiscriminadamente, há que se
avaliar o impacto nos erros de propagação no processo de DO para os casos em que os
intervalos de amostragem das observações são maiores.
9.4 Impacto de Diferentes Intervalos de Amostragem das Observações na
Determinação de Órbita
Os resultados de DO apresentados mostraram que a melhoria de precisão dos modelos
dinâmicos não melhorou os erros resultantes entre a referência do POE/JPL e os
valores obtidos via estimação. Em outras palavras, aumentar a precisão do modelo
dinâmico, indo de um modelo simples de geopotencial somente até um modelo
complexo que combinava três dos principais efeitos perturbadores da órbita do T/P,
não diminuiu a magnitude dos RMS dos erros obtidos via UKF ou EKF. Além disso,
tais resultados mostraram uma competitividade equivalente entre os estimadores, fato
verificado pela mesma ordem de grandeza da magnitude dos erros.
A partir disso, um outro teste foi feito. Tal teste teve duas finalidades bem
determinadas: aprofundar os estudos acerca dos benefícios de se aumentar a precisão
do modelo dinâmico adotado; e averiguar a competitividade aparente que se detectou
entre os estimadores implementados. Este teste consistiu basicamente em efetuar o
processo de DO de satélites considerando diferentes intervalos entre as amostragem
das observações (pseudo-distância) GPS. Os intervalos de amostragem consideradas
foram 10, 30, 60 e 300 segundos, indo portanto desde um pequeno intervalo entre a
predição e a posterior correção dos valores preditos pelos filtros (10 s) até um

82
intervalo extremamente espaçado de 5 minutos (300 s) para efetuar o passo de
atualização do processo (PARDAL et al., 2009).
Com o espaçamento gradativo do intervalo entre o recebimento das medidas,
desejava-se verificar o impacto da complexidade do modelo dinâmico adotado e do
emprego de cada filtro na fase de predição do algoritmo, já que assim a fase de
propagação tem seu efeito aumentado e a precisão da modelagem passa a ter peso
maior na precisão das estimativas em ambos os filtros analisados. Desta forma, neste
teste de utilização de diferentes intervalos de amostragem, foram analisados resíduos
de pseudo-distância preditos (chamados também de inovação), por meio de suas
médias e desvios padrão.
A Figura 9.8 mostra um gráfico de resíduos de pseudo-distância preditos obtidos para
um intervalo de amostragem de 60 s, considerando um modelo dinâmico que combina
perturbações devidas ao geopotencial até ordem e grau 28×28 e à atração
gravitacional luni-solar, e utilizando o UKF como estimador. Esta figura pode ser
encarada como o comportamento típico de resíduos preditos para taxas de
amostragem de 10 e 30 s também, independente da complexidade do modelo
dinâmico adotado e do algoritmo utilizado no processo de estimação da órbita, visto
que os resultados são muito similares. Desta forma, este gráfico é representativo de
todas as dezoito possíveis combinações entre modelos e algoritmos de estimação, para
as três taxas de amostragem anteriormente mencionadas.

83
Resíduos de pseudo-distância preditos (inovação)Amostragem: 60s - Modelo: AGLS
-100
-75
-50
-25
0
25
50
75
100
0 2 4 6 8 10 12 14 16 18 20 22 24tempo, [h]
resí
duos
, [m
]
Figura 9.8 - Comportamento típico de resíduos de pseudo-distância preditos, obtidos via
UKF, para um intervalo de amostragem de 60 s e dados do dia 19/11/1993.
Embora o comportamento gráfico dos resultados de pseudo-distância preditos
aparentem similaridade, ao analisar os valores de média e de desvio padrão,
encerrados na Tabela 9.9, há indícios de que os resultados sugerem maior
espalhamento quando a estimação é feita através do EKF, quando comparado ao
UKF, assim como também parece que os resultados menos esparsos (com menor
desvio padrão) ocorrem quanto mais preciso e complexo for o modelo dinâmico
adotado. Tais fatos se verificaram à medida que o espaçamento entre as medidas
aumentou gradativamente de 10 para 60 s.
O teste mais radical realizado utilizou um alto intervalo de amostragem de 300 s e foi
feito com o intuito de verificar se os resultados realmente implicam em uma maior
dispersão (maior desvio padrão) quando a estimação é feita pelo EKF ou pelo UKF e
se há impacto no espalhamento dos resíduos quando são considerados modelos
dinâmicos de diferentes níveis de complexidade (maior ou menor precisão).
A Tabela 9.9 confirma que o UKF apresenta um desempenho mais eficiente que o
EKF, levando a resíduos das medidas menos dispersos (com menor desvio padrão).
Consequentemente, os resíduos de pseudo-distância preditos pelo UKF são menos
esparsos que aqueles obtidos via EKF, o que significa dizer que o UKF prediz muito

84
melhor o comportamento dos resíduos de pseudo-distância em função da abordagem
em que se baseia seu algoritmo.
Com relação ao modelo dinâmico adotado, modelos mais precisos contribuem para
resultados melhores, o que se traduz em melhor predição dos resíduos das
observações. Através da Tabela 9.9, percebe-se que se a precisão do modelo dinâmico
é aumentada juntamente com o intervalo de amostragem, pode-se claramente verificar
como a média dos resíduos se comporta, aproximando-se mais do valor ideal zero,
com o aumento da complexidade da modelagem dinâmica.
Tabela 9.9 - Estatísticas dos resíduos de psudo-distância preditos para cada modelo de forças considerado e para cada estimador usado na determinação de órbita

85
modelodinâmico
10 0,124 ± 11,38430 0,046 ± 13,68560 -0,187 ± 14,690300 -22,767 ± 92,79010 0,061 ± 11,37230 0,042 ± 13,55460 -0,277 ± 16,221300 -66,785 ± 142,96510 0,122 ± 12,03630 0,032 ± 13,46560 -0,091 ± 14,363300 -1,234 ± 17,48910 0,059 ± 12,02730 0,031 ± 13,46160 -0,180 ± 15,942300 1,861 ± 45,88610 0,115 ± 12,54730 -0,038 ± 14,17860 -0,109 ± 14,021300 -1,294 ± 15,87210 0,052 ± 12,539
30 -0,039 ± 14,05560 -0,201 ± 15,639300 1,021 ± 43,19710 0,115 ± 12,57030 -0,051 ± 13,97160 -0,109 ± 14,017300 -1,288 ± 15,874
UKF
Geo10
Geo28
AGLS
PRS
UKF
EKF
UKF
EKF
UKF
EKF
Resíduos de pseudo-distância preditos
estimador ∆tamostr (s) média ± desvio padrão (m)
Para concluir os resultados desta Seção, a Figura 9.9 mostra dois gráficos de
resultados de resíduos de pseudo-distância preditos, gerados para o maior intervalo de
amostragem (300 s), cujos valores de média e de desvio padrão se encontram na
Tabela 9.9. Fica claro que a rejeição de medidas (no nível de 150 m) é maior na
estimação feita através do EKF que na feita pelo UKF. Embora a rejeição de medidas
ocorra para ambos os algoritmos, a grande diferença é que o UKF consegue se adaptar
melhor a estas condições adversas que o EKF e predizer pseudo-distâncias mais
precisamente. A Figura 9.9 apresenta os resíduos obtidos via ambos os estimadores,
para o modelo dinâmico que combina geopotencial até ordem e grau 28 e atração
gravitacional luni-solar.

86
Resíduos de pseudo-distância preditos (inovação)Amostragem: 300s - Modelo: AGLS
-150
-100
-50
0
50
100
150
0 2 4 6 8 10 12 14 16 18 20 22 24
resí
duos
, [m
]
UKF
-150
-100
-50
0
50
100
150
0 2 4 6 8 10 12 14 16 18 20 22 24tempo, [h]
resí
duos
, [m
]
EKF
Figura 9.9 - Comportamento dos resíduos de pseudo-distância preditos obtidos via UKF e
EKF, para um intervalo de amostragem de 300 s e dados do dia 19/11/1993.

87
9.5 Impacto da Degradação das Condições Iniciais na Determinação de Órbita
Para este teste, a comparação entre UKF e EKF se baseou na robustez dos filtros para
condições iniciais degradadas. O maior interesse está na análise da velocidade de
convergência e em indícios de ocorrência de divergência, de forma que a abordagem
utilizada consistiu em introduzir desde erros pequenos (da ordem de metros) até erros
grandes (da ordem de quilômetros) nas precisas e conhecidas condições iniciais de
posição (dos arquivos POE). Com isso foi possível analisar os comportamentos de
convergência e de divergência (caso ocorra) de cada estimador nas situações em que
as condições iniciais são desde pouco até muito degradadas.
O modelo dinâmico utilizado neste teste incluiu perturbações devidas ao geopotencial
até ordem e grau 28x28 e à atração gravitacional luni-solar. As medidas de pseudo-
distância foram corrigidas em relação aos erros ionosféricos, uma vez que é mais
apropriado monitorar os resultados sem qualquer interferência nos efeitos que possam
mascarar ou alterar os mesmos.
Primeiro foi gerado, para cada filtro (UKF ou EKF), um filtro finamente ajustado. A
órbita do T/P foi então estimada, através de simulação, utilizando precisas e
conhecidas condições iniciais. Os resultados deste processamento foram usados como
solução de referência para cada estimador. Nesta situação, ambos os algoritmos
apresentaram desempenho equivalente e concordaram muito bem, o que significa
dizer que as estatísticas dos erros em posição e dos resíduos de pseudo-distância
foram equivalentes. Isto leva a concluir que se as condições iniciais forem precisas, o
UKF e o EKF mostram padrões de convergência similares assim que o processo de
estimação se inicia e, desta forma, qualquer dos filtros pode ser usado.
No passo seguinte, os erros introduzidos variaram desde pequenos até grandes
valores, indo desde 0,1 km até 1000 km, com passo em potência de 10 (ou seja, os
erros introduzidos foram 0,1 km, 1 km, 10 km, 100 km e 1000 km). Os resultados
obtidos das condições iniciais imprecisas para o UKF e o EKF foram comparados
com as respectivas soluções de referência para erros em posição (transladados para
coordenadas RNT do sistema fixo na órbita do T/P) e resíduos de pseudo-distância.

88
A Tabela 9.10 encerra a análise de convergência dos resíduos de pseudo-distância,
que é medida em termos do intervalo entre o processamento dos dados e a efetiva
convergência dos mesmos. Considera-se que o filtro convergiu no momento a partir
do qual os resíduos apresentam as mesmas estatísticas dos resíduos da solução de
referência (PARDAL et al., 2011). Quando um erro pequeno de 0,1 km é introduzido,
a convergência ocorre instantaneamente após o início do processo de estimação, para
ambos os algoritmos. Para introdução de erros de 1 e de 10 km nas condições iniciais,
o UKF novamente converge imediatamente, enquanto o EKF leva 2 e 2,5 horas,
respectivamente, para convergir. Para uma incerteza de 100 km, o UKF precisa de 2
horas de estimação para alcançar a zona de convergência, enquanto o EKF, de 12
horas. E quando o maior erro de 1000 km é adicionado, o EKF não é capaz de
convergir após 24 horas de processamento, enquanto o UKF ainda converge após 8
horas.
Tabela 9.10 - Velocidade de convergência dos resíduos de pseudo-distância preditos
erros introduzidos
(km)
tempo de convergência
UKF (h)
tempo de convergência
EKF (h)
0,1 0 0
1 0 2
10 0 2,5
100 2 12
1000 8 convergência não observada
Na Tabela 9.11 encontra-se a análise de convergência dos erros em posição em
coordenadas RNT, que novamente é medida através do tempo de convergência.
Quando o menor erro de 0,1 km é introduzido, a convergência ocorre
instantaneamente após o início do processo de estimação, para ambos os algoritmos.
Para os casos de incertezas de 1, 10 e 100 km introduzidas, o UKF sempre converge
antes do EKF para quaisquer das componentes analisadas. E quando o erro de 1000
km é adicionado, o EKF não consegue atingir convergência no período de 24 horas de
processamento, enquanto o UKF ainda converge, embora demandando um tempo
muito longo de quase metade de um dia.

89
Tabela 9.11 - Velocidade de convergência do erro em posição
erros
introduzidos
(km)
tempo de convergência
UKF (h)
tempo de convergência
EKF (h)
R N T R N T
0,1 0,5 0 0 0,5 0 0
1 1 0 1 2,5 1 2
10 3,5 0 1 4,5 1 2
100 3,5 1,5 2 8 16 14
1000 5 11 7 convergência
não
observada
convergência
não
observada
convergência
não
observada
Uma outra verificação estatística foi feita, com o intuito de confirmar que os
algoritmos efetivamente atingem convergência. As estatísticas de pseudo-distância de
referência estão disponíveis na Tabela 9.12, destacadas em sua linha amarela. Elas
são usadas como valores de referência para todos os casos de teste do UKF e do EKF,
cujas estatísticas foram calculadas somente após o alcance da zona de convergência.
A partir da Tabela 9.12 torna-se evidente que os estimadores efetivamente
convergiram (a exceção do EKF para o caso de 1000 km de incerteza), já que suas
estatísticas na região de convergência apresentam valores que se mantém muito
próximos daqueles das respectivas referências.
Tabela 9.12 - Estatísticas dos resíduos de pseudo-distância após convergência do algoritmo
erros introduzidos
(km)
média ± desvio padrão
UKF (m)
média ± desvio padrão
EKF (m)
0 (referência) -1,248 ±±±± 25,638 -1,238 ±±±± 25,614
0,1 -1,160 ± 25,846 -1,154 ± 28,014
1 -1,037 ± 26,870 -1,604 ± 25,721
10 -1,218 ± 27,410 -0,985 ± 25,779
100 -1,318 ± 25,616 -0,994 ± 36,403
1000 -1,133 ± 29,220 convergência não observada

90
Para representar tais averiguações, a Figura 9.10 ilustra o comportamento dos resíduos
da solução de referência e dos resíduos do caso de teste de 1000 km de incerteza nas
condições iniciais. Tais resultados foram analisados para os dois estimadores e,
claramente, dão indícios de que o EKF tende a divergir mais rapidamente que o UKF
para uma condição inicial muito ruim, ou seja, para casos em que a incerteza sobre as
medidas utilizadas no processo de estimação seja de elevada magnitude.
referência - UKF ou EKF - condições iniciais precis as
-200
-150
-100
-50
0
50
100
150
200
0 2 4 6 8 10 12 14 16 18 20 22
tempo, [h]
resí
duos
, [m
]
UKF - 1000km de incerteza nas condições iniciais
-400
-300
-200
-100
0
100
200
300
400
0 2 4 6 8 10 12 14 16 18 20 22tempo, [h]
resí
duos
, [m
]
EKF - 1000km de incerteza nas condições iniciais
-400
-300
-200
-100
0
100
200
300
400
0 2 4 6 8 10 12 14 16 18 20 22tempo, [h]
resí
duos
, [m
]
Figura 9.10 - Comportamento dos resíduos de pseudo-distância: casos de referência e de 1000 km de incerteza nas condições iniciais.

91
A velocidade de convergência dos resíduos de pseudo-distância para o caso de 0,1 km
de incertezas introduzidas nas condições iniciais é instantânea para os dois
estimadores implementados e a maior rapidez de convergência do UKF começa a
partir da introdução de erros da ordem de 1 km ou maiores, conforme mostrado na
Tabela 9.10. A Figura 9.11 traz a evolução comparativa do comportamento dos
resíduos, obtidos via UKF e EKF, para os casos intermediários de 1, 10 e 100 km de
erros. Em todos os casos, embora o UKF e o EKF apresentem convergência, ela é
sempre mais rápida quando o estimador empregado é o UKF. Vale lembrar que se
considera convergência o momento a partir do qual os resíduos apresentam as mesmas
estatísticas dos resíduos da solução de referência, o que se traduz em média em torno
de 1,2 m e desvio padrão da ordem de 26 m (PARDAL et al., 2011).

92
EKF - 1km de incerteza nas condições iniciais
-300
-200
-100
0
100
200
300
0 2 4 6 8 10 12 14 16 18 20 22EKF - 10km de incerteza nas condições iniciais
-300
-200
-100
0
100
200
300
0 2 4 6 8 10 12 14 16 18 20 22EKF - 100km de incerteza nas condições iniciais
-300
-200
-100
0
100
200
300
0 2 4 6 8 10 12 14 16 18 20 22tempo, [h]
UKF - 1km de incerteza nas condições iniciais
-300
-200
-100
0
100
200
300
0 2 4 6 8 10 12 14 16 18 20 22
resí
duos
, [m
]
UKF - 10km de incerteza nas condições iniciais
-300
-200
-100
0
100
200
300
0 2 4 6 8 10 12 14 16 18 20 22
resí
duos
, [m
]
UKF - 100km de incerteza nas condições iniciais
-300
-200
-100
0
100
200
300
0 2 4 6 8 10 12 14 16 18 20 22tempo, [h]
resí
duos
, [m
]
Figura 9.11 - Comportamento comparativo dos resíduos de pseudo-distância para os casos intermediários de teste de incertezas nas condições iniciais.
Continuando com a investigação comparativa do comportamento dos filtros para
medidas degradadas, a Tabela 9.13 apresenta o RMS do erro total em posição, e
novamente os valores de referência estão destacados em amarelo na sua primeira
linha. Da mesma forma que ocorreu com os resíduos de pseudo-distância, os RMS dos
erros resultantes da estimação por qualquer dos algoritmos somente foram
computados após a convergência. A Tabela 9.13 corrobora a informação
anteriormente apresentada de que os estimadores efetivamente convergiram (exceto o
EKF para o caso de 1000 km de erro), já que, após atingir a região de convergência,
seus valores estatísticos (RMS) se mantiveram perto das respectivas referências.

93
Tabela 9.13 - Erro RMS total em posição após convergência do algoritmo
erros introduzidos
(km)
erro RMS
UKF (m)
erro RMS
EKF (m)
0 (referência) 21,835 21,628
0,1 21,656 21,090
1 21,376 19,520
10 18,941 20,264
100 18,708 20,074
1000 22,279 convergência não observada
A Figura 9.12 mostra os erros em coordenadas RNT para os casos de referência do
UKF e do EKF (obtidos para condições iniciais precisas e representados pelos
gráficos à esquerda da figura) e para o caso de introdução da maior incerteza nas
condições iniciais (erros iniciais de 1000 km, representados pelos gráficos à direita da
figura). Tais resultados indicam sinais de divergência do EKF para medidas iniciais
muito degradadas, enquanto o UKF, ainda que tardiamente, consegue atingir a zona
de convergência nas três coordenadas. Na Figura 9.12, as curvas em verde
correspondem à solução do UKF e as curvas em azul, à solução do EKF.

94
erro - 1000km de incerteza nas condições iniciais
-100
-50
0
50
100
0 2 4 6 8 10 12 14 16 18 20 22
-60
-30
0
30
60
0 2 4 6 8 10 12 14 16 18 20 22
-160
-80
0
80
160
0 2 4 6 8 10 12 14 16 18 20 22
tempo, [h]
erro - solução de referência
-50
-25
0
25
50
0 2 4 6 8 10 12 14 16 18 20 22
radi
al, [
m]
UKF EKF
-30
-15
0
15
30
0 2 4 6 8 10 12 14 16 18 20 22
norm
al, [
m]
UKF EKF
-80
-40
0
40
80
0 2 4 6 8 10 12 14 16 18 20 22
tempo, [h]
trans
vers
al, [
m]
UKF EKF
Figura 9.12 - Comportamento dos erros em coordenadas RNT: casos de referência e de 1000 km de incerteza nas condições iniciais.
Assim como ocorreu com os resíduos de pseudo-distância, a velocidade de
convergência dos erros entre UKF e EKF começou a se diferenciar a partir da
introdução de erros da ordem de 1 km ou maiores, conforme a Tabela 9.11, com um
melhor desempenho do UKF em todos os casos intermediários (erros introduzidos de
1, 10 e 100 km). Em todas as situações, embora o UKF e o EKF apresentem
convergência, ela é sempre mais rápida quando o UKF é o estimador. É importante
lembrar que a convergência se dá no momento em que os erros apresentam estatísticas
similares aos da solução de referência, ou seja, erro com cerca de 22 m de RMS total.

95
As Figuras 9.13 a 9.15 mostram os comportamentos das coordenadas dos erros para
cada caso intermediário de teste, ou seja, 1, 10 e 100 km, respectivamente. Nas três
figuras, as curvas em verde representam a solução do UKF e as curvas em azul, a
solução do EKF.
Erro - 1km de incerteza nas condições iniciais
-90
-60
-30
0
30
60
90
0 2 4 6 8 10 12 14 16 18 20 22
radi
al, [
m]
UKF EKF
-90
-60
-30
0
30
60
90
0 2 4 6 8 10 12 14 16 18 20 22
norm
al, [
m]
-90
-60
-30
0
30
60
90
0 2 4 6 8 10 12 14 16 18 20 22
tempo, [h]
tran
sver
sal,
[m]
Figura 9.13 - Comportamento comparativo dos erros em coordenadas RNT para o caso de 1 km de incerteza nas condições iniciais.
Na Figura 9.13 é possível perceber que a componente normal do UKF ainda converge
instantaneamente e também é a componente que mais rápido converge do EKF, cerca
de 1 hora após o início do processamento. As componentes radial e transversal do
UKF levam em torno de 1 hora para atingir a zona de convergência, enquanto as

96
respectivas componentes do EKF precisam de pouco mais de 2 horas para alcançar a
mesma região. Os gráficos da Figura 9.13 corroboram as informações da Tabela 9.11.
Erro - 10km de incerteza nas condições iniciais
-90
-60
-30
0
30
60
90
0 2 4 6 8 10 12 14 16 18 20 22
radi
al, [
m]
UKF EKF
-90
-60
-30
0
30
60
90
0 2 4 6 8 10 12 14 16 18 20 22
norm
al, [
m]
-90
-60
-30
0
30
60
90
0 2 4 6 8 10 12 14 16 18 20 22
tempo, [h]
tran
sver
sal,
[m]
Figura 9.14 - Comportamento comparativo dos erros em coordenadas RNT para o caso de 10 km de incerteza nas condições iniciais.
Na Figura 9.14 vê-se que a componente normal do UKF (curvas em verde) continua
convergindo instantaneamente e permanece sendo a componente do EKF (curvas em
azul) que converge mais rapidamente, ainda em torno de 1 hora após o início do
processamento. As componentes radiais do UKF e do EKF sofreram maior acréscimo
no tempo necessário para atingir a convergência, gastando o primeiro em torno de 3,5
horas e o segundo, em torno de 4,5 horas para convergir. Já as componentes

97
transversais do UKF e do EKF mantiveram o mesmo tempo necessário para alcançar a
região de convergência (no caso de 1 km de erro nas condições iniciais): em torno de
1 hora o UKF e cerca de 2 horas o EKF. Os gráficos da Figura 9.14 confirmam os
resultados apresentados na Tabela 9.10.
Erro - 100km de incerteza nas condições iniciais
-90
-60
-30
0
30
60
90
0 2 4 6 8 10 12 14 16 18 20 22
radi
al, [
m]
UKF EKF
-90
-60
-30
0
30
60
90
0 2 4 6 8 10 12 14 16 18 20 22
norm
al, [
m]
-90
-60
-30
0
30
60
90
0 2 4 6 8 10 12 14 16 18 20 22
tempo, [h]
tran
sver
sal,
[m]
Figura 9.15 - Comportamento comparativo dos erros em coordenadas RNT para o caso de 100 km de incerteza nas condições iniciais.
Para valores de erros iniciais nas medidas mais altos (100 km), os resultados da Figura
9.15 mostram que o UKF manteve as 3,5 horas necessárias para atingir a
convergência na componente radial, precisou de 1,5 hora para a componente normal e
aumentou em 100% o tempo necessário para a componente transversal, que levou 2

98
horas para chegar à zona de convergência. Já o EKF teve aumentos mais
significativos nos tempos para que cada componente atingisse a convergência, mas
ainda assim a alcançou. Foram necessárias 8 horas (78% de aumento) para a
componente radial, 16 horas (1500% de aumento) para a normal e 14 horas (600% de
aumento) para a transversal. Tais fatos fornecem indícios de que o EKF começa a
atingir um limite de convergência, fato já evidenciado na Figura 9.12.

99

100
10 CONCLUSÕES E SUGESTÕES
Neste Capítulo serão expostas as principais conclusões do trabalho e serão feitas
sugestões para trabalhos futuros, de acordo com o curso que os fatos seguiram no
desenvolvimento da tese.
10.1 Conclusões
Inicialmente, propôs-se implementar um filtro não linear, com características de
tempo real, através do método sigma-ponto, para estimar o vetor de estado que
caracteriza a órbita do satélite, com base em um conjunto de observações do sistema
GPS. Esta técnica de filtragem não linear vem sendo investigada em várias aplicações
e apresenta características que são vantajosas no aspecto de facilidade de
implementação, robustez e precisão.
Aplicações de satélites artificiais muitas vezes necessitam descrever o movimento
orbital com uma precisão sub-métrica. Uma metodologia para este processo de
determinação de órbita (DO), incluindo um processo dinâmico, baixo custo
computacional e as principais perturbações que afetam a órbita, vem sendo
desenvolvida no INPE.
A principal motivação para este trabalho foi aplicar técnicas modernas de estimação
de estado ao problema específico de DO, que apresenta um grande inconveniente
adicional imposto pela característica não linear tanto da dinâmica do movimento
quanto das observações. Para testes preliminares do algoritmo foram utilizadas as
efemérides de órbita precisa do satélite TOPEX/Poseidon (T/P), cujos dados do
receptor GPS de bordo e estimativas precisas de sua órbita estão disponíveis para a
realização de comparações, permitindo validar os métodos desenvolvidos.
Isto posto, o objetivo fundamental da tese foi o desenvolvimento de um filtro não
linear, baseado no método sigma-ponto, para estimar o vetor de estado que caracteriza
a órbita de um satélite, com base em um conjunto de observações do mesmo. Tal
objetivo foi atingido com a formulação adequada das equações da dinâmica e das
observações utilizadas no filtro sigma-ponto, desenvolvido inicialmente na forma
genérica e posteriormente adaptado e implementado no problema específico de DO
via GPS.

101
Os trabalhos para o desenvolvimento e a implementação de um filtro de Kalman
sigma-ponto não linear, baseado na transformação “unscented”, com o objetivo
específico de determinar a órbita de um satélite artificial em tempo real e usando
medidas GPS partiram da implementação de um algoritmo simples e compacto. Como
resultado obteve-se um estimador recursivo de baixo custo computacional, o que o
torna ideal para aplicações de tempo real. Inicialmente, foi implementado o conceito
do UKF na fase de propagação do processo de estimação, utilizando o EKF na fase de
atualização. Em seguida, o UKF foi implementado na fase de atualização, mantendo o
EKF na propagação. Por último, o algoritmo do UKF foi completamente
implementado, substituindo o EKF nas fases de propagação e de atualização, sendo
esta a primeira vez, até onde se tem informação, que resultados de DO, utilizando o
conceito do UKF e o processamento de dados reais pelo filtro, foram apresentados
(PARDAL et al., 2009).
Ao comparar os resultados obtidos pelos quatro algoritmos, ficaram evidentes a
competitividade e o comportamento e as estatísticas muito semelhantes;
especialmente o UKF completo contra o EKF. Tais resultados indicam que a
introdução da transformação “unscented” foi bem sucedida, uma vez que o
comportamento dos resultados continuou muito semelhante ao dos resultados obtidos
com o EKF.
Um outro teste foi feito: comparação de custo de tempo de processamento. O tempo
de CPU foi aumentando à medida que o EKF era substituído pelo UKF. Os resultados
obtidos fornecem evidências de que o tempo de CPU (carga computacional) não é
diretamente proporcional ao aumento na dimensão do estado causado pela geração do
conjunto de sigma-pontos.
Tendo-se constatado que convergência e consistência estatística foram alcançadas, foi
possível agora concentrar esforços em diminuir os erros entre o estado estimado pelo
filtro e a referência do POE/JPL. Antes da análise propriamente do desempenho e da
precisão do filtro não linear de Kalman sigma-ponto, através de sua variante
“unscented” (UKF), em um problema de DO real, com dados reais, foi necessário
estabelecer uma solução como referência. Esta solução foi obtida através do filtro de
Kalman estendido (EKF) e, com exceção do caso de perturbações devidas ao
geopotencial até ordem e grau 10, cuja solução já existia (CHIARADIA, 2000), todas

102
as demais soluções, seja de referência ou do UKF, foram obtidas durante o
desenvolvimento desta tese (PARDAL et al. 2009, 2009(a), 2009(b), 2010, 2011).
Na análise de propagação de órbita foram avaliados os efeitos de cada termo
perturbador antes da aplicação dos filtros de Kalman “unscented” ou estendido.
Verificou-se que a inclusão da atração gravitacional luni-solar no modelo dinâmico
produz melhores resultados, o que se traduz em menor magnitude dos erros (entre o
estado estimado e a referência do POE/JPL), transladados para as componentes radial,
normal e transversal do sistema de referência fixo na órbita, quando comparada ao
modelo que inclui apenas o geopotencial de qualquer ordem e grau ou ao modelo que
combina geopotencial e pressão de radiação solar direta. Anteriormente, a
comparação com o modelo dinâmico composto apenas por geopotencial e pressão de
radiação solar direta, cuja modelagem é altamente complexa, mostrou que tal efeito
não provoca melhorias significativas nos resultados (PARDAL, 2008), fato
corroborado pelos resultados desta tese.
Na análise dos resultados de DO foi visto que aumentar a precisão do modelo
dinâmico não é, em alguns dos casos estudados, fator determinante para a melhoria
dos resultados obtidos. Este fato já era esperado, uma vez que a estimação via filtros
de Kalman não confia plenamente da dinâmica do sistema, como o faz o Método de
Mínimos Quadrados, por exemplo. Sendo assim, embora a propagação de órbita tenha
mostrado que melhorar o modelo dinâmico diminui os erros entre o estado estimado e
a referência do POE/JPL, tal fato não se reflete na DO, pois os filtros de Kalman
assumem um ruído dinâmico diferente de zero. No que se refere ao custo de tempo de
processamento, constatou-se que o tempo de CPU gasto não é diretamente
proporcional ao aumento na dimensão do estado causado pela geração dos sigma-
pontos. Constatou-se ainda que a inclusão de qualquer efeito perturbador,
independente da complexidade de seu modelo, aumenta o custo do tempo de
processamento, principalmente se a implementação for feita através do UKF
(PARDAL et al. 2009).
Os resultados de DO mostram que aumentar a precisão do modelo dinâmico, indo de
um modelo simples de geopotencial até um modelo complexo que combina três dos
principais efeitos perturbadores da órbita do T/P, não diminui, nos caos estudados, a
magnitude dos erros obtidos via UKF ou EKF, e mostram também a competitividade

103
equivalente entre os estimadores (PARDAL et al. 2010). Com isso, o passo natural do
desenvolvimento da tese, após a análise dos resultados de DO, foi verificar a robustez
dos filtros para dois casos: taxas de amostragem esparsas; e condições iniciais
degradadas.
O teste do primeiro caso teve duas finalidades bem determinadas: aprofundar os
estudos acerca dos benefícios de se aumentar a precisão do modelo dinâmico adotado;
e averiguar a competitividade aparente que se detectou entre os estimadores
implementados. Este teste consistiu basicamente em considerar diferentes intervalos
de amostragem das observações no processo de DO. Com o espaçamento gradativo do
intervalo entre o recebimento das medidas, desejava-se verificar o impacto da
complexidade do modelo dinâmico adotado e de cada filtro utilizado na fase de
predição do algoritmo; desta forma, foram analisados resíduos de pseudo-distância
preditos. À medida que o espaçamento entre as medidas aumentava, o UKF
apresentou um desempenho mais eficaz que o EKF, levando a resíduos das medidas
menos dispersos que aqueles obtidos via EKF, o que significa dizer que o UKF
predisse muito melhor o comportamento dos resíduos de pseudo-distância em função
da abordagem em que se baseia seu algoritmo. Com relação ao modelo dinâmico
adotado, modelos mais precisos contribuem para resultados melhores, o que se traduz
em melhor predição dos resíduos das observações.
Para o segundo caso, a partir de filtros finamente ajustados, foram estabelecidas
soluções de referência para o UKF e o para EKF, obtidas a partir de condições iniciais
conhecidas e precisas. A partir de então, foram introduzidos desde erros pequenos da
ordem de metros até erros elevados da ordem de centenas de metros nas referidas
condições iniciais e foram analisados erro em posição em coordenadas RNT e
resíduos de pseudo-distância. Para condições iniciais pouco degradadas, ambos os
filtros se comportaram de forma equivalente no que tange ao tempo necessário para
convergência e às estatísticas após a convergência. No entanto, à medida que a
degradação aumentava, o UKF mostrou-se mais robusto que o EKF, sempre atingindo
convergência em tempo inferior ao EKF e inclusive alcançando convergência mesmo
no caso de maior degradação, situação na qual o EKF sequer conseguiu convergir
(PARDAL et al. 2011).

104
Desta forma, conclui-se que o UKF atinge precisão equivalente a do EKF em
problemas similares (com mesma complexidade de modelo dinâmico e mesmas
observações), embora seja mais robusto nos casos em que as condições iniciais estão
degradadas ou o intervalo de amostragem das medidas é muito espaçada. O UKF
também se mostrou competitivo em termos de tempo de processamento, uma vez que,
mesmo demandando maior tempo para efetuar o processo de estimação, este tempo
ainda não configura fator excludente de sua aplicabilidade a problemas de tempo real.
E mesmo que exija maior complexidade de programação e mais tempo de
processamento, como demanda menos trabalho “a priori”, por descartar o cálculo da
matriz Jacobiana, fundamental na implementação através do EKF, e considerando as
velocidades de processamento dos computadores atuais, a viabilidade do emprego do
UKF é pertinente.
10.2 Sugestões para Extensão do Trabalho
Neste trabalho, o procedimento de determinação de órbitas apresentado utilizou dados
reais do T/P. Uma solução de referência foi gerada através da implementação do EKF
e foi usada para comparação dos resultados do UKF. Os resultados obtidos foram
comparados com os arquivos de referência do POE/JPL, que apresentam estimativas
de posição com erro de no máximo 15 cm, enquanto este trabalho apresentou
estimativas de posição com RMS dos erros em torno de 17 m para 24 horas de DO,
considerando o modelo completo de forças utilizado, tanto para os resultados obtidos
via UKF quanto EKF.
Durante a apresentação de trabalho em eventos científicos (especialmente ION GNSS
2010), foi feito um alerta da necessidade de melhorar significativamente o pré-
processamento de dados antes da aplicação de métodos mais sofisticados. Ainda uma
outra sugestão surgiu: a de utilizar outros satélites mais modernos, cuja dinâmica e
cujos dados GPS apresentam redundância maior e receptores GPS embarcados de
melhor desempenho, como os satélites da família JASON, por exemplo. Considerando
estas contribuições recebidas e todos os resultados obtidos durante o desenvolvimento
da tese, para que estes erros sejam reduzidos e para que o tempo de processamento do
UKF diminua, algumas sugestões são feitas, no sentido de melhorar o procedimento
de DO:

105
Incluir a resolução da ambiguidade inerente à medida de fase da portadora em
tempo real, e não em pré-processamento, como vem sendo feito. Com isso,
cada medida de fase será atualizada com base na medida do instante anterior e,
portanto, a ambiguidade será resolvida a partir da ambiguidade do instante
anterior. Isto significa dizer que, à medida que o tempo passar, a ambiguidade
deve tender a seu valor verdadeiro, de maneira semelhante ao que ocorre com
os métodos PPP (posicionamento por ponto preciso) (MONICO, 2000).
Substituir o satélite de teste do problema de DO pela família JASON, por
algumas razões: satélite mais moderno; satélite que apresenta dinâmica e
dados GPS de maior redundância; e satélite com receptores GPS embarcados
de melhor desempenho.
Reduzir os sigma-pontos gerados através da média e da covariância de uma
distribuição e empregada pela transformação “unscented” do UKF de 2n + 1
para n + 1 pontos (JULIER e UHLMANN, 2002). Com esta abordagem, é
esperado efetuar o processo de DO com menos tempo de processamento, uma
vez que a cada iteração uma nuvem menor de pontos será gerada, processada e
atualizada.

106
REFERÊNCIAS BIBLIOGRÁFICAS
BERTIGER, W. I. et al. GPS precise tracking of TOPEX/POSEIDON: results and implications. Journal of Geophysical Research. v. 99, n. C12, p. 24449-24464, Dec. 1994.
BINNING, P. W. GPS, dual frequency, SA free satellite navigation. In: NAVIGATION TECHNOLOGY FOR THE THIRD MILLENNIUM, 52, 19-21 June 1996, Cambridge. Proceedings ... Boston, MA: ION Publications, 1996. p. 803-812.
BINNING, P. W. Absolute and relative satellite to satellite navigation using GPS. 163 p. Thesis (Doctor of Philosophy Degree, Aerospace Engineering Sciences) - University of Colorado, Boulder, 1997.
BINNING, P. W. Satellite orbit determination using GPS pseudoranges under SA. Advances in the Astronautical Sciences. Spaceflight Mechanics, v. 95, n. 1, p. 183-193, Feb. 1997(a).
BROWN, R. G.; HWANG, P.Y.C. Introduction to random signals and applied Kalman filtering. 3. ed. New York: John Wiley & Sons, 1985. 502p.
BUTKOV, E. Física matemática. 1. ed. Rio de Janeiro: Editora LTC, 1988. 724 p. ISBN: 85-2161145-5.
CHIARADIA, A. P. M. Determinação e manobras autônomas de órbitas de satélites artificiais em tempo real usando medidas GPS de única frequência. 202 p. (INPE-8755-TDI/798). Tese (Doutorado em Mecânica Espacial e Controle) - Instituto Nacional de Pesquisas Espaciais (INPE), São José dos Campos, 2000.
CHIARADIA, A. P. M.; GILL, E.; MONTENBRUCK, O.; KUGA, H. K.; PRADO, A. F. B. A. Algorithms for onboard orbit determination using GPS-OBODE-GPS. Braunschweig: German Space Operations Center (DLR), 2000(a). 43 p. (DLR-GSOC TN 00-04).
CHIARADIA, A. P. M.; KUGA, H. K.; PRADO, A. F. B. A. Investigation on ionospheric correction models for GPS signals. In: PRADO, A. F. B. A. (Ed.). Advances in space dynamics. São José dos Campos: INPE, 2000(b). cap. 16, p. 214-219. ISBN: 85-901487-1-8.

107
CHIARADIA, A. P. M.; KUGA, H. K.; PRADO, A. F. B. A. Single frequency GPS measurements in real-time satellite orbit determination. Acta Astronautica. v. 53, n. 2, p. 123-133, 2003.
DANA, P. H. GPS overviews. Disponível em: <http://www.colorado.edu/geography/gcraft/notes/gps/gps_f.html>. Acesso em: 15 jul. 2006.
DOW, J. M.; MUR, T. M.; CASOTTO, S.; FELTENS, J.; MARTÍNEZ; C. G.; PEREZ, M. A. B. Determination of satellite orbits with GPS. In: INTERNATIONAL SYMPOSIUM ON SPACE FLIGHT DYNAMICS, 14, 22-28 May 1994, St Petersburg-Moscow. Proceedings ... Moscow: Russian Academy of Sciences, 1994. p. 22-28.
EL-ENNA, A. A. Analytical treatment of the Earth oblateness and solar radiation pressure effects on an artificial satellite: I. the equations of motion. Applied Mathematics and Computation. v. 138, n. 2-3, p. 443-453, June 2003.
EL-ENNA, A. A. Analytical treatment of the Earth oblateness and solar radiation pressure effects on an artificial satellite: II. the solution. Applied Mathematics and Computation. v. 151, n. 1, p. 121-145, Mar. 2004.
EL-SAFTAWY, M. I.; EL-ENNA, A. A. The relativistic and direct solar radiation pressure effects on an axially symmetric spacecraft: I. the Hamiltonian and the canonical equations of motion. Applied Mathematics and Computation. v. 132, n. 2-3, p. 505-514, Nov. 2002.
EL’YASBERG, P. E. Introduction to the theory of flight of artificial Earth satellites. Jerusalem: Israel Program for Scientific Translations, 1967. 345 p.
GALSKI, R. L.; ORLANDO, V.; KUGA, H. K. Autonomous orbit control procedure, using a simplified GPS navigator, applied to the CBERS satellite. In: INTERNATIONAL SYMPOSIUM ON SPACEFLIGHT DYNAMICS, 16, 2001, Pasadena, USA. Proceedings... Pasadena: Jet Propulsion Laboratory, California Institute of Technology, 2001. (INPE-9573-PRE/5203).
GALSKI, R. L. Desenvolvimento de um navegador autônomo, usando GPS, aplicado ao controle autônomo de órbita. 2001. 162p. (INPE-8982-TDI/813). Dissertação (Mestrado em Engenharia e Tecnologia Espaciais / Mecânica Espacial e Controle) - Instituto Nacional de Pesquisas Espaciais, São José dos Campos, 2002.

108
GOMES, V. M. Determinação de órbitas de satélites artificiais em tempo real através da solução de navegação de GPS. 2004-05-25. (INPE--TDI/). Dissertação (Mestrado em Mecânica Espacial e Controle) - Instituto Nacional de Pesquisas Espaciais (INPE), São José dos Campos, 2004.
GURTNER, W. RINEX: the receiver-independent exchange format. GPS World. v. 5, n. 7, p. 48-52, 1994.
JULIER, S. J.; UHLMANN, J. K.; DURRANT-WHYTE, H. F.A new approach for filtering nonlinear systems. In: AMERICAN CONTROL CONFERENCE, June 1995, Seattle, Washington. Proceedings … Seattle: American Automatic Control Council (AACC), 1995. p. 1628-1632. TA5 - 9:15.
JULIER, S.J.; UHLMANN, J.K. A new extension of the Kalman filter for nonlinear systems. In: INTERNATIONAL SYMPOSIUM ON AEROSPACE/DEFENSE SENSING, SIMULATION AND CONTROLS, 11, 1997, Orlando. Proceedings… Orlando: SPIE, 1997.
JULIER, S. J.; UHLMANN, J. K.; DURRANT-WHYTE, H. F. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Transactions on Automatic Control, v. 45, n. 3, p. 477-482, 2000.
JULIER, S. J.; UHLMANN, J. K. Reduced sigma point filters for the propagation of means and covariance through nonlinear transformations. In: IEEE AMERICAN CONTROL CONFERENCE, 2002, Anchorage, USA. Proceedings … Anchorage: IEEE, 2002, p. 887-892.
JULIER, S. J.; UHLMANN, J. K. Unscented filtering and nonlinear estimation. IEEE Transactions on Automatic Control, v. 92, n. 3, 2004.
JWO, D-J; LAI, C-N. Unscented Kalman filter with nonlinear dynamic process modeling for GPS navigation. GPS Solutions. Springer: Berlin, v. 12, n. 4, 2008. ISSN 1521-1886. Disponível em: < http://www.springerlink.com/content/t20h6582p5838r45/fulltext.pdf>. Acesso em: 17 mar. 2009.
KAULA, W. M. Theory of satellite geodesy: application of satellites to geodesy. New York: Dover Publications, 2000. 140 p. ISBN: 0-486-41465-5. (reprint edition).

109
KUGA, H. K. Estimação adaptativa de órbitas aplicada a satélites a baixa altitude. 1981. 128p. (INPE-2316-TDL/079). Dissertação (Mestrado em Ciência Espacial) - Instituto Nacional de Pesquisas Espaciais, São José dos Campos, 1982.
KUGA, H. K. Determinação de órbitas de satélites artificiais terrestres através de técnicas de estimação combinadas a técnicas de suavização de estado. 249p. (INPE-4959-TDL/079). Tese (Doutorado em Mecânica Espacial e Controle) - Instituto Nacional de Pesquisas Espaciais (INPE), São José dos Campos, 1989.
KUGA, H. H. Técnicas de determinação de órbita de satélites artificiais. In: PRADO, A. F. B. A.; KUGA, H. K. (Eds.). Fundamentos de tecnologia espacial. São José dos Campos: INPE, 2001. cap.11, p. 137-169. ISBN 85-17-00004-8. (INPE-9932-PRE/5494).
KUGA, H. K., LOPES, Roberto Vieira da Fonseca, EINWOEGERER, W. Experimental static calibration of an IMU (Inertial Measurement Unit) based on MEMS In: INTERNATIONAL CONGRESS OF MECHANICAL ENGINEERING, 19., 2007, Brasília. Proceedings... Rio de Janeiro: ABCM, 2007. p.1 - 8
LANGLEY, R. B. A GPS glossary. GPS World. v. 6, n. 10, p. 63-65, 1995.
LEE, D-J.; ALFRIEND, K.T. Precise real-time orbit estimation using the unscented Kalman filter. Advances in the Astronautical Sciences. v. 114, Suppl.: Spaceflight Mechanics 2003, 20 p., 2003.
LEE, D-J., ALFRIEND, K. T. Adaptive sigma point filtering for state and parameter estimation. In: AIAA/AAS ASTRODYNAMICS CONFERENCE,16-19 Aug. 2004. Providence. Proceedings … Reston, VA: American Institute of Aeronautics and Astronautics, 2004. 20 p. AIAA-2004-5101.
LEE, D-J.; ALFRIEND, K. T. Sigma point filtering for sequential orbit estimation and prediction. Journal of Spacecraft and Rockets. v. 44, n. 2, Mar-Apr 2007.
LEICK, A. GPS satellite surveying. 3. ed. New York: John Wiley & Sons, 1995. 464 p. ISBN: 978-0-471-05930-1.
LÜ, S.; CAI, L.; DING, L.; CHEN, J. Two Efficient Implementation Forms of Unscented Kalman Filter. In: IEEE INTERNATIONAL CONFERENCE ON CONTROL AND AUTOMATION, 2007, Guangzhou, China. Proceedings … Guangzhou, China: ICCA, 2007.p. 761-764. ISBN: 978-1-4244-0818-4.

110
MARSHALL, J. A.; ANTRESIAN, P. G.; ROSBOROUGH, G. W.; PUTNEY, B. H. Modeling radiation forces acting on satellites for precision orbit determination. Advances in the Astronautical Sciences. Astrodymanics Conference, v. 76, Part I, p. 72-96, Aug. 1991.
MARSHALL, J. A.; LUTHCKE, S. B. Modelling radiation forces on TOPEX/Poseidon for precision orbit determination. Journal of Spacecraft and Rockets. v. 31, n. 1, p. 99-105, Jan.-Feb. 1994.
van der MERWE, R., JULIER, S. I., WAN, E. A. Sigma-point Kalman filters for nonlinear estimation and sensor-fusion - applications to integrated navigation. In: AIAA GUIDANCE, NAVIGATION, AND CONTROL CONFERENCE AND EXHIBIT, 16-19 Aug. 2004, Rhode Island. Proceedings … Providence: American Institute of Aeronautics and Astronautics, 2004.
MONICO, J. F. G. Posicionamento pelo NAVSTAR-GPS: descrição, fundamentos e aplicações. São Paulo: Editora UNESP, 2000. 287 p. ISBN: 8571393281.
PAIVA, R. N. Determinação autônoma de órbita usando GPS. 1988. 230p. (INPE-4815-TDL/361). Tese (Doutorado em CEA/Mecânica Orbital) - Instituto Nacional de Pesquisas Espaciais, São José dos Campos, 1988.
PARDAL, P. C. P. M. Determinação de órbita via GPS considerando modelo de pressão de radiação solar para o satélite TOPEX/Poseidon. 2007. 178p. (INPE-14802-TDI/1245). Dissertação (Mestrado em Engenharia e Tecnologia Espaciais/Mecânica Espacial e Controle) - Instituto Nacional de Pesquisas Espaciais, São José dos Campos, 2008.
PARDAL, P. C. P. M., KUGA, H. K., VILHENA DE MORAES, R. Non linear sigma point Kalman filter applied to orbit determination using GPS measurements. In: INTERNATIONAL TECHNICAL MEETING OF THE SATELLITE DIVISION OF THE INSTITUTE OF NAVIGATION,(ION GNSS 2009), 22., 20-24 Sept. 2009, Savannah, GA, USA. Proceedings… p. 1478-1485.
PARDAL, P. C. P. M., KUGA, H. K., VILHENA DE MORAES, R. Comparison of extended Kalman filter and non linear sigma point filter for orbit determination using GPS measurements. In: INTERNATIONAL CONGRESS OF MECHANICAL ENGINEERING, 20., (COBEM 2009), 15-20 Nov. 2009(a), Gramado, RS, Brazil. Proceedings… Gramado: ABCM, 2009. 10 p.

111
PARDAL, P. C. P. M., KUGA, H. K., VILHENA DE MORAES, R. A discussion related to orbit determination using nonlinear sigma point Kalman filter. Mathematical Problems in Engineering. v. 2009, 2009(b). 12 p. doi:10.1155/2009/140963. Disponível em: < http://www.hindawi.com/journals/mpe/2009/140963/>. Acesso em: 10 dez. 2009.
PARDAL, P. C. P. M., KUGA, H. K., VILHENA DE MORAES, R. Comparing the extended and the sigma point Kalman filters for orbit determination modeling using GPS measurements. In: INTERNATIONAL TECHNICAL MEETING OF THE SATELLITE DIVISION OF THE INSTITUTE OF NAVIGATION, (ION GNSS 2010), 23., 21-25 Sep. 2010, Portland, OR, USA. Proceedings… Portland, 2010. p. 2732-2742.
PARDAL, P. C. P. M., KUGA, H. K., VILHENA DE MORAES, R. Robustness assessment between sigm appoint and extended Kalman filter for orbit determination. In: INTERNATIONA SYMPOSIUM ON SPACE FLIGHT DYNAMICS, (22nd ISSFD ), 22., 28 Feb.-04 Mar. 2011, São José dos Campos, SP, Brazil. Proceedings… 14 p. Disponível em: <http://www.issfd22.inpe.br/S10-Orbit.Determination-OD/S10_P2_ISSFD22_PF_046.pdf>. Acesso em: 16 mar. 2011.
PARKINSON, B.W.; SPILKER Jr., J. J. Global positioning system: theory and applications. Reston: American Institute of Aeronautics and Astronautics, 1996. 793 p. ISBN: 978-1563472497.
PRADO, A. F. B. A.; KUGA, H. K. (Eds).Fundamentos de tecnologia espacial. São José dos Campos: INPE, 2001. 220 p. ISBN: 85-17-00004-8.
SZEBEHELY, V. G.; MARK, H. Adventures in celestial mechanics. 1. ed. New York: John Wiley & Sons, 1967. 310 p. ISBN: 0-471-13317-5.
VILHENA DE MORAES, R. Non-gravitational disturbing forces. Advances in Space Research. v. 14, n. 5, p. 45-68, 1994.
VILHENA DE MORAES, R.; SILVA, A. A.; KUGA, H. K. Low cost orbit determination using GPS. In: INTERNATIONAL CONFERENCE ON MATHEMATICAL PROBLEMS IN ENGINEERING AND AEROSPACE SCIENCES, 5., 2-4 June 2004, Timisoara. Proceedings ... Cambridge: Cambridge Scientific Publishers, 2005. p. 487-493. ISBN: 1904868487.

112
WAN, E.A.; van der MERWE, R. The unscented Kalman filter for nonlinear estimation. In: ADAPTIVE SYSTEMS FOR SIGNAL PROCESSING, COMMUNICATION AND CONTROL (AS-SPCC) SYMPOSIUM, 2000, Alberta. Proceedings … Alberta: IEEE, 2000. p.153-156.

113
ANEXO A - O SISTEMA GPS
O sistema GPS, originalmente chamado de NAVSTAR (Navigation System with Time
and Ranging), foi idealizado na década de 1960 pelo Departamento de Defesa dos
Estados Unidos, resultando da junção de dois programas: o TIMATION (Time
Navigation), da Marinha, e o Projeto 621-B, da Força Aérea.
Segundo o Departamento de Defesa norte-americano, inicialmente o sistema deveria
ter potencial para cumprir os seguintes requisitos:
Precisão da ordem de centímetros para o posicionamento;
Determinação exata do tempo e velocidade;
Disponibilidade contínua de dados de navegação com cobertura global e
regional;
Independência das condições meteorológicas;
Base para estabelecimento de um referencial global;
Potencial generalizado de navegação para minimizar a proliferação de
sistemas para fins especiais ou de cobertura regional.
Hoje em dia, pode-se dizer que o sistema, além desses requisitos básicos, é utilizado
em diversas áreas com grande sucesso, tais como: navegação, posicionamento,
geociências, geofísica, com finalidades tanto civis como militares.
O sistema GPS é dividido em três segmentos: espacial, de controle e usuário.
A.1 Segmento Espacial
Basicamente, o sistema GPS consiste de uma constelação nominal de 24 satélites
operacionais e mais três satélites mantidos como reserva, que podem se reposicionar
para substituir satélites com mal funcionamento, de modo a se ter um mínimo de
quatro satélites visíveis simultaneamente 24 horas por dia. Estes satélites estão
divididos em 3 órbitas quase circulares, com período de 11h58min e semi-eixo maior
de cerca de 26.500 km, inclinadas de 63º e espaçadas de 120º (LEICK, 1995). A
Figura 4.1, apresentada no Capítulo 4, esquematiza a configuração da constelação
GPS.

114
As órbitas de grande altitude foram escolhidas para que os satélites pudessem ser
rastreados durante várias horas antes de desaparecerem no horizonte; pois, do ponto
de vista de um observador fixo na superfície da Terra, um mesmo satélite só é visível
uma vez a cada 24 horas.
À medida que o satélite descreve sua órbita, um mecanismo de controle de atitude
mantém o corpo principal do mesmo orientado de modo que sua parte inferior, onde
estão localizadas as antenas, permaneça sempre apontada para a vertical local;
enquanto os painéis solares giram constantemente em torno de um eixo comum, para
melhor exposição ao Sol.
Cada satélite possui dois relógios atômicos (um de césio e outro de rubídio) a bordo,
duas portadoras de rádio-frequência L1 = 1575,42 MHz e L2 = 1227,60 MHz, com
potência de 450W.
Tais satélites transmitem sinais de navegação gerados a bordo e que consistem de 2
códigos com alta taxa de transmissão, o código C/A (livre) a 1 Mb/s e código P
(protegido) com 2 frequências distintas L1 e L2 a 10 Mb/s. Estes sinais fornecem
dados sobre as efemérides dos satélites GPS (mensagem de navegação) bem como
informações de tempo atômico GPS e outras informações consideradas relevantes
(saúde dos satélites, almanaque, deriva dos relógios de bordo, etc.).
A.2 Segmento de Controle
Este segmento está destinado à coleta de dados, relativos à atmosfera local e à pseudo-
distância de cada satélite, o que permite produzir o tempo GPS e as efemérides dos
satélites. É ainda responsável pelo gerenciamento de veículos espaciais, atualizando
periodicamente as informações que são transmitidas a cada um dos satélites, entre
efemérides, status, dados de relógio e almanaque.
Para isso, existe a estação Central de Controle (MCS – Master Control Station)
localizada na base de Falcon Air Force, Colorado, Estados Unidos. Juntamente com
esta, existem mais quatro estações de monitoramento (MS – Monitor Station),
localizadas no Havaí, Kwajalein, Diego Garcia e Ascención Island; além de uma
estação de Transmisssão de Dados para os satélites (ULS – UpLoading Station),

115
localizada na base aérea de Vandenberg, na Califórnia. A estação central de controle e
as estações monitoras estão mapeadas na Figura A.1.
Figura A.1 - Estação central de controle e estações monitoras do GPS.
Fonte: Dana (1995).
A.3 Segmento Usuário
O segmento usuário consiste basicamente de receptores militares e civis projetados
especialmente para decodificar e processar os sinais que recebem dos satélites. O
receptor computadorizado grava as transmissões de vários satélites e aplica algoritmos
de solução para obtenção de posição, velocidade e tempo. São necessários pelo menos
quatro satélites em visada para o cálculo das posições e tempo, em um determinado
instante.
Em resumo, os satélites GPS formam um conjunto de pontos de referência no espaço
para navegação sobre a superfície da Terra ou em baixas altitudes e órbitas. Portanto,
o Sistema GPS fornece medidas de distância entre a posição desconhecida do usuário
e as referências do sistema, ou seja, os satélites da constelação GPS (PARKINSON e
SPILKER, 1996).
A.4 Estrutura do Sinal e da Mensagem do GPS
Os sinais que chegam de cada satélite são formados por três componentes: uma
portadora RF; código binário; e dados da mensagem de navegação.

116
As frequências de transmissão utilizadas pelos satélites são (MONICO, 2000; LEICK,
1995; DOW et al., 1994):
1. Comunicação com os usuários – Link de Transmissão:
a) LINK1 (L1): portadora de 1575,42 MHz; níveis de -160 a -163 dBW; e
modulação em fase.
b) LINK2 (L2): portadora de 227,60 MHz; níveis de -166 dBW; e
modulação em fase.
2. Comunicação com as estações de controle – Link de Transmissão:
a) BANDA – S = 2227,50 MHz.
3. Comunicação com as estações de controle – Link de Recepção:
a) BANDA – S = 1783,74 MHz.
A mensagem transmitida por cada satélite ao usuário contém:
Parâmetros para correção do relógio do satélite;
Efemérides do satélite e parâmetros para correções orbitais;
Almanaque e “saúde” de todos os satélites da constelação;
Dados para correção da propagação ionosférica;
Código de identificação.
Estas informações são chamadas de “System Data” e são transmitidas em formato
binário, sendo antecedidas por um código de identificação, cujo conhecimento é
imprescindível para que o usuário as retire do sinal recebido. As portadoras de
frequências L1 e L2 são moduladas em fase e em quadratura de fase pela composição
de “System Data” com “Identification Code”.
Os códigos de identificação utilizados são os seguintes:
a) Código P (“Precision”): uso militar, transmitido nas bandas L1 e L2;
b) Código C/A (“Coarse/Acquisition”): uso civil, transmitido somente na banda
L1 e sujeito a degradações.
Estes códigos são do tipo RPN (Ruído-Pseudo-Aleatório) e permitem que a
mensagem de posição transmitida do satélite para o usuário seja eventualmente

117
acrescida de ruído, não necessariamente Gaussiano, que deteriora a precisão com que
o usuário determinará sua posição.
As técnicas de degradação dos sinais dos códigos são duas: Disponibilidade Seletiva
(SA) e “anti-spoofing” (A-S), ambas controladas pelos Estados Unidos.
A.5 Principais Fontes de Erros
As principais fontes de erro do Sistema GPS são (MONICO, 2000; LEICK, 1995):
Erro devido à geometria dos satélites com relação ao observador;
Desvios dos relógios dos satélites;
Atraso de propagação e processamento dos sinais pelos circuitos do receptor
GPS;
Erros devidos ao multicaminho dos sinais;
Efeitos da atmosfera sobre a velocidade e a trajetória de propagação dos sinais
transmitidos;
Erros devidos à resolução, ao não sincronismo e ao ruído do receptor do
usuário;
Erro na determinação da posição dos satélites (erro de efemérides).
Várias formas de representar as efemérides foram estudadas até se chegar a um
conjunto de parâmetros que, sendo uma extensão dos elementos keplerianos, definem
a posição do satélite.
O conjunto de parâmetros utilizado na mensagem transmitida pelo GPS é atualizado
pela Estação de Controle a cada 1 hora, embora cada conjunto seja válido por 1,5
hora. A superposição de 30 minutos garante uma margem de segurança para que o
usuário possa receber o novo conjunto atualizado.
As principais perturbações das órbitas dos satélites GPS, em função das características
do segmento espacial, são o campo gravitacional terrestre, a atração gravitacional
luni-solar e a pressão de radiação solar (incluindo a sombra da Terra). Outra
perturbação a se considerar é a ressonância 2:1, devida a comensurabilidade do
período orbital com o período de rotação terrestre. Em aplicações específicas, para se

118
atingir a precisão necessária, todas estas perturbações devem ser consideradas
simultaneamente.
Embora o Sistema GPS possua mecanismos e algoritmos para corrigir tais
perturbações, esta correção não é perfeita, sempre existindo, portanto, resíduos não
compensados. Uma estimativa destes resíduos, usando medidas de pseudo-distância,
encontra-se na Tabela A.1.
Tabela A.1 - Estimativa de resíduos, usando medidas de pseudo-distância
Resíduo Estimativa
Desvio do relógio e efemérides 1,5 mEfeitos da atmosfera 2,4 a 5,2 m"Group Delay" 1,0 mMulticaminho 1,2 a 2,7 mResolução/ruído do receptor e dinâmica do usuário 1,5 m
ERRO TOTAL COMBINADO 3,6 a 10,4 m
A.6 Posicionamento via GPS
Nesta Seção, serão descritos os observáveis do GPS, ou seja, os dois tipos de medidas
de observação usados para calcular a distância entre o transmissor e o receptor: a
pseudo-distância e a fase da portadora. O princípio básico do Sistema GPS para
determinação de órbita foi discutido no texto principal da tese, na Seção 6.1.
Observáveis do Sistema GPS
Os observáveis GPS são as distâncias deduzidas das diferentes medidas de tempo ou
fase, baseadas na comparação entre os sinais recebidos e os sinais gerados pelo
receptor. Pode-se dizer que esta diferença de tempo é simplesmente o tempo que o
sinal leva para ser propagado do satélite à antena do receptor. Dois observáveis
básicos do sistema GPS são: pseudo-distância e fase da portadora.
A pseudo-distância é uma medida entre os satélites GPS e a antena do receptor, com
referência às épocas de emissão e de recepção dos códigos. O tempo de transmissão
dos sinais é medido via correlação do código de Ruído-Pseudo-Aleatório (PRN)
gerado pelo satélite (sinal GPS recebido) com os sinais gerados internamente pelo
receptor. Uma vez obtida a correlação, obtém-se o tempo de envio do sinal desde o

119
satélite GPS até o receptor, que corresponde à pseudo-distância. A denominação
“pseudo” advém do fato de as medidas estarem corrompidas por erros de propagação
do sinal, por refração atmosférica, por erros de relógio, entre outros.
A pseudo-distância ao i-ésimo satélite GPS é definida por (PARKINSON et al.,
1996):
v)dT(dtcρP iii +++−+= TROPION DD
em que Pi é a pseudo-distância medida pelo usuário em relação ao i-ésimo satélite
GPS; iρ é a distância geométrica; c é a velocidade de propagação da luz; dt é o desvio
do relógio do usuário; dTi é o desvio do relógio do i-ésimo satélite GPS; DION são os
desvios ionosféricos; DTROP são os desvios troposféricos; e v representa ruídos de
multi-caminho, erros entre canais do receptor e demais erros.
Já a fase da portadora é uma medida de observação definida como a diferença entre a
fase da portadora do satélite GPS recebida pela antena do receptor e a fase do
oscilador interno do receptor na época da medida. A ideia de utilização das medidas
de fase para a determinação de órbitas justifica-se pela estabilidade das fases e pela
precisão na sua medida. Ela é a mesma quantidade que a pseudo-distância, com duas
diferenças distintas: é cerca de 100 vezes mais precisa em relação à pseudo-distância;
e tem um desvio de relógio arbitrário resultante de um número desconhecido de ciclos
inteiros entre o transmissor e o receptor. A principal dificuldade de utilização deste
tipo de medida é a resolução da ambiguidade N (o número de ciclos não lido no
instante t0 da sincronização dos sinais), que produz impacto direto na precisão da
medida.
A fase da portadora do i-ésimo satélite GPS é dada por (LEICK, 1995):
( ) vc
f(t)(t)(t) irir ++++−= TROPION DDNϕϕϕ
em que ϕ ir(t) é a fase da portadora completa no instante de recepção nominal t; ϕ r(t) é
a fase da portadora do receptor no instante de recepção nominal t (ciclos); ϕ i(t) é a
fase da portadora do satélite recebida no instante de recepção nominal t (ciclos); N é a

120
ambiguidade inicial; DION são os desvios ionosféricos; DTROP são os desvios
troposféricos; v são outros efeitos e erros; f é a frequência nominal da portadora; e c é
a velocidade da luz.
Vantagens:
Permite navegação autônoma e em tempo real;
Existem sempre satélites visíveis;
Alta imunidade a interferência;
Baixo custo de equipamentos e de manutenção em solo;
Atende inúmeros usuários;
Rápida obtenção das informações transmitidas pelos satélites;
Cobertura global;
Alta precisão no cálculo da posição devida à geometria favorável;
Cálculo de manobras orbitais a bordo.
Desvantagens:
O atraso no tempo pode custar um erro de vários quilômetros na posição do
satélite, visto que o receptor GPS, para calcular a distância, deve multiplicar o
intervalo de tempo pela velocidade da luz;
Necessidade de um receptor por satélite;
Qualificação espacial não totalmente provada para navegação autônoma (o
sistema GPS foi projetado para garantir a visibilidade de pelo menos quatro
satélites para um usuário na Terra; no entanto, para um usuário no espaço, esta
garantia não existe).